Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству управления ходом электромоторного вагона, к которому применяется установка накопления энергии, такое как вторичный аккумулятор или электрический двухслойный конденсатор.
Уровень техники
В общем, электромоторный вагон выполнен с возможностью принимать электроэнергию из контактного провода с помощью токосъемника, приводить в действие электромотор с помощью преобразователя мощности, к примеру устройство инвертора с использованием принимаемой мощности, и двигаться. Когда вагон тормозит, используется так называемый рекуперативный тормоз, который рекуперативно приводит в действие электромотор, чтобы получать тормозную силу. Рекуперативная мощность, сформированная на этой стадии, подается в нагрузки других вагонов, присутствующих около данного вагона, через контактный провод, контактный рельс и т.п. и потребляется в нагрузках.
Тем не менее, ранним утром или ночью либо на бесшумном участке железной дороги с небольшим числом работающих поездов в некоторых случаях другие вагоны не присутствуют около данного вагона, и рекуперативная мощность, сформированная посредством данного вагона, не потребляется в достаточной степени. Когда рекуперативная мощность данного вагона превышает электроэнергию, потребляемую посредством других вагонов, напряжение контактного провода повышается. С большой вероятностью различные устройства, подключенные к контактному проводу, повреждаются.
Следовательно, устройство инвертора, монтируемое на электромоторном вагоне, включает в себя детектор напряжения, который определяет напряжение контактного провода и т.п. (напряжение контактного провода или напряжение конденсатора фильтра, например, на входной стороне устройства инвертора, эквивалентное напряжению контактного провода). Когда напряжение контактного провода и т.п. повышается и превышает предварительно определенное значение, устройство инвертора осуществляет управление для подавления силы рекуперативного торможения, чтобы подавлять формирование рекуперативной мощности, и выполнено с возможностью предотвращать повышение напряжения контактного провода и т.п. до указанного значения или более. В этом случае тормозная сила вагона, в котором сила рекуперативного торможения подавляется и является недостаточной, дополняется посредством механического тормоза, выполненного с возможностью прижимать тормозную колодку к колесу или тормозному диску. Энергия торможения (кинетическая энергия) вагона изменяется на тепловую и выделяется в атмосферу. В таком случае возникает проблема в том, что энергия торможения, которая должна первоначально иметь возможность использования в нагрузках других вагонов, тратится впустую, и происходит износ тормозной колодки механического тормоза.
В последние годы постоянно повышается эффективность установок накопления энергии, к примеру, вторичного аккумулятора и электрического двухслойного конденсатора. Следовательно, создается система накопления мощности, в которой установки накопления энергии устанавливаются на электромоторном вагоне, и избыточная рекуперативная мощность, например, в ходе торможения без достаточной рекуперативной нагрузки накапливается в установках накопления энергии и повторно используется во время движения с использованием силовой установки.
Эта система накопления мощности включает в себя устройство преобразователя, которое выполняет преобразование постоянного тока, и установку накопления энергии, включающее в себя установку накопления энергии, к примеру, вторичный аккумулятор или электрический двухслойный конденсатор. В общем, способ зарядки и разрядки установки накопления энергии выполнен с возможностью управлять токами зарядки и разрядки в установке накопления энергии через устройство преобразователя.
В качестве примера такой системы накопления мощности из предшествующего уровня техники известна раскрытая в патентном документе 1 (выложенная заявка на патент Японии номер 2003-199204) технология для монтажа электрического двухслойного конденсатора на вагоне и использование явления, в котором напряжение контактного провода или напряжение конденсатора фильтра повышается в ходе рекуперативного торможения, когда другие железнодорожные составы в качестве рекуперативных нагрузок не присутствуют около данного вагона, когда значение детектированного напряжения конденсатора фильтра превышает предварительно определенное значение, формирования команды управления током поглощения согласно избыточной величине и осуществления управления устройства преобразователя, чтобы снимать и накапливать избыточную рекуперативную мощность во время повышения напряжения контактного провода в электрическом двухслойном конденсаторе, и разрядки рекуперативной мощности во время следующего движения с использованием силовой установки, чтобы реализовывать повторное использование рекуперативной энергии.
Сущность изобретения
Предшествующий уровень техники, раскрытый в патентном документе 1, реализован так, чтобы управлять током зарядки в установку накопления энергии на основе значения определения напряжения контактного провода или напряжения конденсатора фильтра, вводимого в модуль управления устройства преобразователя. Тем не менее, в этом случае существуют проблемы, поясненные ниже.
1. Когда детекторы напряжения, которые определяют напряжение контактного провода или напряжение конденсатора фильтра, соответственно, подаются в устройство инвертора и устройство преобразователя, возникает ошибка между напряжением контактного провода или напряжением конденсатора фильтра, определяемым посредством устройства инвертора, и напряжением контактного провода или напряжением конденсатора фильтра, определяемым посредством устройства преобразователя, вследствие ошибки определения между детекторами напряжения. Например, в детекторе напряжения, который может определять общие 1500 В в качестве напряжения контактного провода электрической железной дороги, поскольку допуск определения составляет приблизительно 3%, возникает ошибка определения приблизительно ±45 В.
В этом случае даже в режиме, в котором детектор напряжения, предоставляемый в устройстве инвертора, определяет то, что повышение напряжения контактного провода или напряжения конденсатора фильтра превышает предварительно определенное значение, и осуществляет управление для подавления силы рекуперативного торможения, в некоторых случаях напряжение контактного провода или напряжение конденсатора фильтра, определяемое посредством детектора напряжения, подаваемое в устройство преобразователя, не достигает предварительно определенного значения. Следовательно, устройство преобразователя не выполняет съем рекуперативной мощности в установку накопления энергии. Как результат, режим, в котором мощность рекуперативного торможения является недостаточной, продолжается, и механический тормоз работает.
2. Когда множество устройств инвертора и систем накопления мощности (установок накопления энергии и устройств преобразователя) присутствует в железнодорожном составе, возникает ошибка среди значений определения детекторов напряжения. Поэтому когда напряжение контактного провода и т.п. повышается и превышает предварительно определенное значение в ходе рекуперативного торможения, мощность поглощения в установках накопления энергии устройств преобразователя колеблется, и рабочие режимы (значения тока возбуждения) устройств преобразователя варьируются. Другими словами, даже при условии идентичного напряжения контактного провода и т.п. (напряжения контактного провода или напряжения конденсатора фильтра), устройство преобразователя, включающее в себя детектор напряжения, который определяет, что напряжение контактного провода и т.п. является довольно низким, имеет небольшую мощность поглощения в установке накопления энергии, и устройство преобразователя, включающее в себя детектор напряжения, который определяет, что напряжение контактного провода и т.п. является довольно высоким, имеет большую мощность поглощения в установке накопления энергии. Когда неустойчивость возникает в рабочих режимах устройств преобразователя и установок накопления энергии, возникает проблема, к примеру, меньший срок службы установки, которая часто находится в рабочем режиме.
Настоящее изобретение разработано с учетом вышеизложенного. Задача настоящего изобретения заключается в том, чтобы получить устройство управления ходом электромоторного вагона, к которому применяется установка накопления энергии, например, вторичный аккумулятор или электрический двухслойный конденсатор, указанное устройство управления ходом электромоторного вагона обеспечивает эффективное выполнение съема рекуперативной мощности, сформированной в ходе рекуперативного торможения, в установку накопления энергии и допускает подавление, даже когда множество устройств инвертора, устройств преобразователя и установок накопления энергии присутствует в железнодорожном составе, неустойчивости в рабочих режимах устройств преобразователя и установок накопления энергии.
Решение задачи
Чтобы решить вышеуказанные проблемы, устройство управления ходом электромоторного вагона согласно одному аспекту настоящего изобретения имеет такую структуру, которая содержит устройство инвертора, подключенное к источнику питания постоянного тока; электромотор, подключенный к выводу устройства инвертора; устройство преобразователя, подключенное к вводу устройства инвертора и установка накопления энергии, подключенная к выводу устройства преобразователя, причем устройство управления ходом электромоторного вагона сконфигурировано с возможностью разряжать часть мощности движения или рекуперативной мощности электромотора из установки накопления энергии или заряжать часть мощности движения или рекуперативной мощности в установке накопления энергии, при этом устройство преобразователя включает в себя модуль управления преобразователя, который формирует на основе сигнала режима рекуперации в качестве сигнала, указывающего режим подавления рекуперативной мощности или рекуперативного крутящего момента, или рекуперативного тока, эквивалентного рекуперативной мощности, значение команды управления током зарядки, которое является значением команды управления электрического тока, с помощью которого устройство преобразователя заряжает установку накопления энергии, формирует значение команды управления током зарядки и разрядки устройства преобразователя на основе значения команды управления током зарядки, и осуществляет управление.
Преимущества изобретения
Согласно настоящему изобретению, устройство управления ходом включает в себя модуль управления преобразователя, который формирует на основе величины подавления рекуперативного крутящего момента, указывающей режим рекуперативного крутящего момента или режим рекуперативной мощности электромотора, значение команды управления током зарядки, с помощью которого установку преобразователя заряжает установка накопления энергии, и формирует на основе значения команды управления током зарядки, значение команды управления током зарядки и разрядки для устройства преобразователя и осуществляет управление. Следовательно, предоставляется такое преимущество, что в устройстве управления ходом электромоторного вагона, к которому применяется установка накопления энергии в виде вторичного аккумулятора или электрического двухслойного конденсатора, можно эффективно выполнять съем рекуперативной мощности, сформированной в ходе рекуперативного торможения, в установку накопления энергии и подавлять, даже когда множество устройств инвертора, устройств преобразователя и установок накопления энергии присутствует в железнодорожном составе, неустойчивость в рабочих режимах устройств преобразователя и установок накопления энергии.
Краткое описание чертежей
На чертежах:
фиг.1 - схема примера конфигурации устройства управления ходом электромоторного вагона в первом варианте осуществления настоящего изобретения;
фиг.2 - схема примера конфигурации устройства преобразователя в первом варианте осуществления настоящего изобретения;
фиг.3 - схема примера конфигурации устройства инвертора в первом варианте осуществления настоящего изобретения;
фиг.4 - схема примера конфигурации модуля управления инвертора в первом варианте осуществления настоящего изобретения;
фиг.5 - схема примера соотношения между сигналами в первом варианте осуществления настоящего изобретения;
фиг.6 - схема примера конфигурации модуля управления преобразователя в первом варианте осуществления настоящего изобретения;
фиг.7 - схема для пояснения потока мощности в ходе рекуперативного торможения в первом варианте осуществления настоящего изобретения;
фиг.8 - схема примера конфигурации модуля формирования команд управления током зарядки во втором варианте осуществления настоящего изобретения;
фиг.9 - схема примера конфигурации модуля формирования команд управления током зарядки в третьем варианте осуществления настоящего изобретения;
фиг.10 - схема примера конфигурации в электромоторном вагоне, включающем в себя множество устройств инвертора и устройств преобразователя в четвертом варианте осуществления настоящего изобретения;
фиг.11 - схема примера конфигурации модуля управления преобразователя в четвертом варианте осуществления настоящего изобретения.
Подробное описание вариантов осуществления изобретения
Варианты осуществления устройства управления ходом электромоторного вагона согласно настоящему изобретению поясняются подробно ниже на основе чертежей. Настоящее изобретение не ограничено вариантами осуществления.
Первый вариант осуществления
Фиг.1 является схемой устройства управления ходом электромоторного вагона в первом варианте осуществления настоящего изобретения. Как показано на фиг.1, электроэнергия из подстанции (не показана) вводится на контактный вывод P положительного плеча устройства инвертора (в дальнейшем называемого просто "инвертором") 50 и контактный вывод P1 положительного плеча устройства преобразователя (в дальнейшем называемого просто "преобразователем") 40 из контактного провода 1 через токосъемник 2. Токи отрицательного плеча из инвертора 50 и преобразователя 40 соединяются с рельсом 4 через соответствующие контактные выводы N и N1 через колесо 3 и возвращаются в отрицательное плечо подстанции (не показана).
Преобразователь 40 включает в себя выходные контактные выводы P2 и N2 постоянного тока. Установка 60 накопления энергии подключается к выходным контактным выводам P2 и N2 постоянного тока. Установка 60 накопления энергии образована посредством соединения множества установок накопления энергии, к примеру, вторичных аккумуляторов или электрических двухслойных конденсаторов последовательно и параллельно, чтобы получать требуемое напряжение и требуемую емкость. Поскольку конкретная конфигурация установки 60 накопления энергии является общеизвестной, подробное пояснение конфигурации опускается.
Инвертор 50 включает в себя выходные контактные выводы U, V и W переменного тока. Электромотор 71 подключен к выходным контактным выводам U, V и W переменного тока. Электромотор 71 является электромотором переменного тока. Трехфазный асинхронный электромотор или синхронный электромотор являются подходящими в качестве электромотора 71. Колесо 3 приводится в движение посредством электромотора 71, чтобы заставлять электромоторный вагон двигаться.
Ведущий контроллер 10, предоставляемый в кабине машиниста (не показан) электромоторного вагона, является устройством, с помощью которого машинист электромоторного вагона выполняет задание команд в устройство инвертора и т.п., чтобы регулировать ускорение и замедление. Сигнал MC управляющей команды из ведущего контроллера 10 вводится в инвертор 50. Сигнал MC управляющей команды включает в себя команды относительно ускорения при движении с использованием силовой установки, включения и выключения тормоза и интенсивности включения и выключения тормоза электромоторного вагона. Инвертор 50 управляет крутящим моментом электромотора 71 на основе сигнала MC управляющей команды.
Управляющий сигнал VC выводится из инвертора 50 в преобразователь 40. Управляющий сигнал VC является сигналом, включающим в себя величину VDTELM подавления рекуперативного крутящего момента (в дальнейшем называемую просто "величиной подавления"), которая является величиной, указывающей режим подавления рекуперативного крутящего момента или величину подавления рекуперативной мощности, и является сигналом режима рекуперации, скорость VEL электромоторного вагона (которая может быть выходной частотой инвертора 50, числом оборотов электромотора 71 и т.д.), сигнал PBC режима рекуперации движения с использованием силовой установки (сигнал режима инвертора), который является сигналом, указывающим, находится инвертор 50 в режиме управления движением с использованием силовой установки или режиме рекуперативного торможения, входной ток ISV инвертора 50 и напряжение ESV контактного провода инвертора 50. Подробности относительно управляющего сигнала VC и функций управляющего сигнала VC поясняются ниже.
Конфигурация преобразователя 40 поясняется со ссылкой на фиг.2, которая является схемой примера конфигурации преобразователя 40 в первом варианте осуществления настоящего изобретения. Как показано на фиг.2, электроэнергия из токосъемника 2 вводится на входные контактные выводы P1 и N1. Дроссель 41 подключается к входному контактному выводу P1. Конденсатор 42 фильтра (в дальнейшем называемый просто "конденсатором") подключается к посткаскаду дросселя 41.
Схема LC-фильтра, включающая в себя дроссель 41 и конденсатор 42, подавляет ток шумовых помех, сформированный посредством операции переключения переключающих элементов, поясненной позднее, от протекания в контактный провод 1 и сглаживает компонент пульсации, включенный в напряжение контактного провода 1 (напряжение контактного провода), чтобы сглаживать напряжение на обоих концах конденсатора 42.
Напряжение на обоих концах входных контактных выводов P1 и N1 (=напряжение контактного провода) определяется посредством детектора 43a напряжения и вводится в модуль 46 управления преобразователя в качестве значения ESD определения напряжения контактного провода. Напряжение на обоих концах конденсатора 42 определяется посредством детектора 43b напряжения и вводится в модуль 46 управления преобразователя в качестве значения EFCD определения напряжения конденсатора (в дальнейшем называемого просто "значением определения напряжения").
Схема 44 преобразователя подключается к обоим концам конденсатора 42. Схема 44 преобразователя включает в себя переключающие элементы 44H и 44L. Переключающие элементы подвергаются управлению включения/выключения (управлению переключения) посредством сигнала DGC включения/выключения из модуля 46 управления преобразователя. Схема 44 преобразователя является так называемой схемой двунаправленного понижающего прерывателя и имеет функцию понижения для понижения напряжения EFCD согласно управлению переключением посредством переключающих элементов 44H и 44L и вывода напряжения EFCD, а также функцию управления током для регулирования выходного тока требуемым образом. Поскольку конфигурация и работа схемы 44 преобразователя является общеизвестной, пояснение конфигурации и работы опускается.
На выходе схемы 44 преобразователя предоставляются детектор 47 тока, который определяет выходной ток и выводит выходной ток в качестве выходного тока IB преобразователя, сглаживающий дроссель 45, который сглаживает электрический ток, и детектор 43c напряжения, который определяет напряжение посткаскада сглаживающего дросселя 45 (=напряжение установки 60 накопления энергии) и выводит напряжение посткаскада в модуль 46 управления преобразователя в качестве выходного напряжения VB преобразователя.
Сигналы ESD, EFCD, VB и IB определения из детекторов 43a, 43b и 43c напряжения и детектора 47 тока вводятся в модуль 46 управления преобразователя. Управляющий сигнал VC из инвертора 50, поясненного ниже, вводится в модуль 46 управления преобразователя. Подробности управляющего сигнала VC поясняются ниже. Модуль 46 управления преобразователя формирует сигнал DGC включения/выключения в схему 44 преобразователя на основе этих входных сигналов.
Конфигурация инвертора 50 поясняется далее. Фиг.3 является схемой примера конфигурации инвертора 50 в первом варианте осуществления настоящего изобретения. Как показано на фиг.3, электроэнергия из токосъемника 2 вводится на входные контактные выводы P и N. Детектор 57 тока, который определяет входной ток и выводит входной ток в качестве входного тока ISV инвертора, размещается во входном контактном выводе P. Дроссель 51 подключается к посткаскаду детектора 57 тока. Конденсатор 52 подключается к посткаскаду дросселя 51.
Схема LC-фильтра, включающая в себя дроссель 51 и конденсатор 52, подавляет ток шумовых помех, сформированный посредством операции переключения переключающих элементов, поясненной ниже, от протекания в контактный провод 1 и сглаживает компонент пульсации, включенный в напряжение контактного провода 1 (напряжение контактного провода), чтобы сглаживать напряжение на обоих концах конденсатора 52.
Напряжение на обоих концах входных контактных выводов P и N (=напряжение контактного провода) определяется посредством детектора 53a напряжения и вводится в модуль 56 управления инвертора в качестве напряжения ESV контактного провода. Напряжение на обоих концах конденсатора 52 определяется посредством детектора 53b напряжения и вводится в модуль 56 управления инвертора в качестве значения EFCV определения напряжения.
Напряжение конденсатора 52 вводится в схему 55 инвертора. Схема 55 инвертора включает в себя переключающие элементы 54U, 54V, 54W, 54X, 54Y и 54Z. Переключающие элементы подвергаются управлению включением/выключением (управлению переключением) посредством сигнала IGC включения/выключения из модуля 56 управления инвертора. Схема 55 инвертора является схемой трехфазного двухуровневого инвертора по напряжению и имеет функцию преобразования напряжения конденсатора 52 в переменное напряжение, имеющее произвольную абсолютную величину и произвольную частоту, согласно управлению переключением посредством переключающих элементов 54U, 54V, 54W, 54X, 54Y и 54Z, и выводит переменное напряжение. Поскольку конфигурация и работа схемы 55 инвертора является общеизвестной, пояснение конфигурации и работы опускается.
Выводы U, V и W схемы 55 инвертора выводятся в электромотор 71.
Значения ESV, EFCV и ISV определения из детектора 53a напряжения, детектора 53b напряжения и детектора 57 тока, поясненных выше, вводятся в модуль 56 управления инвертора. Сигнал MC управляющей команды из ведущего контроллера 10 вводится в модуль 56 управления инвертора. Модуль 56 управления инвертора формирует на основе этих входных сигналов сигнал IGC включения/выключения в схему 55 инвертора и управляет крутящим моментом электромотора 71 требуемым образом. Модуль 56 управления инвертора выводит управляющий сигнал VC в преобразователь 40. Подробности управляющего сигнала VC поясняются ниже.
Управление крутящим моментом электромотора 71 в инверторе 50 поясняется ниже. Фиг.4 является схемой примера конфигурации модуля 56 управления инвертора в первом варианте осуществления настоящего изобретения. Как показано на фиг.4(a), сигнал MC управляющей команды вводится в модуль 56a формирования команд управления крутящим моментом. Модуль 56a формирования команд управления крутящим моментом формирует на основе команды управления тормозной силой и т.п., включенных в сигнал MC управляющей команды, команду PTRS управления запрошенным рекуперативным крутящим моментом, которая является командой управления крутящим моментом рекуперативного торможения, которую должен формировать электромотор 71.
Значение EFCV определения напряжения вводится в модуль 56b вычитания. Модуль 56b вычитания выводит разность между значением EFCV определения напряжения и заданным значением VDL напряжения начала подавления рекуперации (которая составляет 1800 В на фиг.4(a), но может быть другим значением) и вводит разность в модуль 56bb ограничения с отсечением отрицательных значений. Модуль 56bb ограничения с отсечением отрицательных значений выводит только положительное значение в модуль 56c усиления (схему усилителя) в посткаскаде.
Когда входное значение EFCV определения напряжения превышает заданное значение VDL напряжения начала подавления рекуперации (1800 В на фиг.4(a)), модуль 56c усиления усиливает величину избыточности и формирует и выводит величину VDTELM подавления. Модуль 56c усиления может использовать пропорциональное усиление, которое дополнительно может заменяться посредством произвольной функции, включающей в себя интегральный элемент и т.п.
Команда PTRS управления запрошенным рекуперативным крутящим моментом и величина VDTELM подавления вводятся в модуль 56d вычитания. Модуль 56d вычитания вычисляет разность между командой PTRS управления запрошенным рекуперативным крутящим моментом и величиной VDTELM подавления и выводит разность в качестве команды PTR управления рекуперативным крутящим моментом.
Команда PTR управления рекуперативным крутящим моментом вводится в модуль 56e управления крутящим моментом. Модуль 56e управления крутящим моментом формирует на основе команды PTR управления рекуперативным крутящим моментом сигнал IGC включения/выключения в схему 55 инвертора, так что рекуперативные крутящие моменты, сформированные посредством электромотора 71, совпадают с командой PTR управления рекуперативным крутящим моментом.
Поскольку модуль 56 управления инвертора сконфигурирован так выше, когда рекуперативные нагрузки других электромоторных вагонов и т.п., подключенных к контактному проводу 1, являются недостаточными, и значение EFCV определения напряжения увеличивается и превышает заданное значение VDL напряжения начала подавления рекуперации в ходе рекуперативного торможения, можно формировать величину VDTELM подавления согласно степени избыточности, вычитать величину VDTELM подавления из команды PTRS управления запрошенным рекуперативным крутящим моментом и формировать команду PTR управления рекуперативным крутящим моментом, которая является командой управления рекуперативным крутящим моментом электромотора 71.
Согласно такой операции, крутящий момент рекуперативного торможения электромотора 71 подавляется так, что он меньше значения команды PTRS управления запрошенным рекуперативным крутящим моментом. Следовательно, можно подавлять рекуперативную мощность из электромотора 71. Значение EFCV определения напряжения поддерживается около заданного значения VDL напряжения начала подавления рекуперации. Можно подавлять избыточное повышение в напряжении контактного провода.
Величина VDTELM подавления выводится в преобразователь 40 в качестве управляющего сигнала VC вместе с другой информацией (на чертеже, ISV и ESV). Естественно, модуль 56 управления инвертора также выполнен с возможностью выполнять формирование крутящего момента движения с использованием силовой установки. Тем не менее, формирование крутящего момента движения с использованием силовой установки не показано на чертежах.
Работа модуля 56 управления инвертора поясняется на временной оси со ссылкой на фиг.5. Фиг.5 является схемой примера соотношения между сигналами в первом варианте осуществления настоящего изобретения. В частности, на фиг.5 показан пример соотношения между командой PTRS управления запрошенным рекуперативным крутящим моментом, величиной VDTELM подавления, командой PTR управления рекуперативным крутящим моментом, мощностью PSB подавления рекуперации, командой PREF1 управления мощностью зарядки и командой IREF1 управления током зарядки (значением команды управления током зарядки).
На фиг.5 команда PTR управления рекуперативным крутящим моментом, величина VDTELM подавления, мощность PSB подавления рекуперации, команда RPEF1 управления мощностью зарядки и команда IREF1 управления током зарядки электромотора 71 показаны в порядке от начала. Мощность PSB подавления рекуперации, команда PREF1 управления мощностью зарядки и команда IREF1 управления током зарядки поясняются позднее.
Во время t0, показанное на фиг.5, модуль 56 управления инвертора принимает сигнал MC управляющей команды, включающий в себя команду начала для рекуперативного торможения, и формирует команду PTR управления рекуперативным крутящим моментом, как пояснено выше. Модуль 56 управления инвертора формирует сигнал IGC включения/выключения и осуществляет управление электромотором 71 так, что электромотор 71 выводит значение крутящего момента, которое совпадает с командой PTR управления рекуперативным крутящим моментом.
Во время t1 режим, в котором рекуперативная нагрузка контактного провода 1 является недостаточной относительно рекуперативной мощности электромотора 71, значение EFCV определения напряжения увеличивается и превышает заданное значение VDL напряжения начала подавления рекуперации. Как пояснено со ссылкой на фиг.4(a), величина VDTELM подавления формируется. Следовательно, команда PTR управления рекуперативным крутящим моментом является значением, полученным посредством вычитания величины VDTELM подавления из команды PTRS управления запрошенным рекуперативным крутящим моментом (указываемой посредством линии с попеременными длинным и коротким тире), запрашиваемым посредством сигнала MC управляющей команды. Модуль 56e управления крутящим моментом осуществляет управление электромотором 71 на основе команды PTR управления рекуперативным крутящим моментом. Следовательно, в рекуперативной мощности из электромотора 71 значение EFCV определения напряжения подавляется до близкого к заданному значению напряжения начала подавления рекуперации.
Во время t2 режим, в котором рекуперативная нагрузка контактного провода 1 является недостаточной относительно рекуперативной мощности электромотора 71, исключается. Следовательно, величина VDTELM подавления снижается до нуля, и команда PTR управления рекуперативным крутящим моментом становится равна команде PTRS управления запрошенным рекуперативным крутящим моментом.
Поясняется модуль 46 управления преобразователя, который является основой настоящего изобретения. Фиг.6 является схемой примера конфигурации модуля 46 управления преобразователя в первом варианте осуществления настоящего изобретения. Как показано на фиг.6, величина VDTELM подавления и скорость VEL электромоторного вагона (которая может быть выходной частотой инвертора 50, числом оборотов электромотора 71 и т.д.) умножаются между собой посредством умножителя 81 и выводятся в модуль 82 формирования команд управления током зарядки (т.е. крутящий момент (нм)×скорость (рад/с)=мощность (кВт)). Коэффициент преобразования и т.п., необходимый при вычислении электроэнергии, не показан на фиг.6.
Модуль 82 формирования команд управления током зарядки формирует команду IREF1 управления током зарядки на основе мощности PSB подавления рекуперации и выводит команду IREF1 управления током зарядки в модуль 83 выбора. Модуль 82 формирования команд управления током зарядки включает в себя модуль 82a вычисления команд управления мощностью зарядки и делитель 88. Когда мощность PSB подавления рекуперации равна нулю, модуль 82 формирования команд управления током зарядки поддерживает команду PREF1 управления мощностью зарядки равной нулю. Когда мощность PSB подавления рекуперации формируется, модуль 82 формирования команд управления током зарядки формирует команду PREF1 управления мощностью зарядки согласно мощности PSB подавления рекуперации. Модуль 82 формирования команд управления током зарядки делит, с помощью делителя 88, команду PREF1 управления мощностью зарядки на выходное напряжение VB преобразователя, чтобы преобразовывать команду PREF1 управления мощностью зарядки в команду IREF1 управления током зарядки. На фиг.6 команда PREF1 управления мощностью зарядки формируется пропорционально мощности PSB подавления рекуперации. Тем не менее, команда PREF1 управления мощностью зарядки не ограничена этим.
Команда PREF1 управления мощностью зарядки имеет такую характеристику, что когда мощность PSB подавления рекуперации превышает P1, верхний предел команды PREF1 управления мощностью зарядки поддерживается при P2. P2 является значением, полученным с учетом верхнего предела принимаемой мощности зарядки установки накопления энергии, включенного в установку 60 накопления энергии. Посредством приспособления такой характеристики можно формировать команду PREF1 управления мощностью зарядки, соответствующую мощности PSB подавления рекуперации, в динамическом диапазоне установки накопления энергии. P2 может быть определен на основе верхнего предела принимаемого тока зарядки установки накопления энергии.
Соотношение между командой PTRS управления запрошенным рекуперативным крутящим моментом, величиной VDTELM подавления, командой PTR управления крутящим моментом, мощностью PSB подавления рекуперации, командой PREF1 управления мощностью зарядки и командой IREF1 управления током зарядки показана на фиг.5. Желательно задавать команду PREF1 управления мощностью зарядки как значение, превышающее мощность PSB подавления рекуперации, как пояснено ниже (т.е. усиление>1).
Модуль 46 управления преобразователя формирует мощность PLMX движения с использованием силовой установки, когда входной ток ISV и напряжение ESV контактного провода инвертора 50 вводятся в умножитель 85 и умножаются между собой. Модуль 46 управления преобразователя делит, с помощью делителя 89, мощность PLMX движения с использованием силовой установки на выходное напряжение VB преобразователя, чтобы преобразовывать мощность PLMX движения с использованием силовой установки в верхнее предельное значение IREFMAX тока разрядки на выходной стороне (стороне установки 60 накопления энергии) преобразователя 40.
Модуль 86 задания максимального тока разрядки, предоставляемый внутри модуля 46 управления преобразователя, выводит максимальное заданное значение IBM тока разрядки (допустимое максимальное значение тока) согласно рабочим характеристикам установки накопления энергии, включенного в установку 60 накопления энергии.
Модуль 87 ограничения ограничивает верхний предел максимального заданного значения IBM тока разрядки с помощью верхнего предельного значения IREFMAX тока зарядки и выводит команду IREF2 управления током разрядки (значение команды управления током разрядки). В частности, модуль 87 ограничения формирует меньшее из максимального заданного значения IBM тока разрядки и верхнего предельного значения IREFMAX тока разрядки в качестве команды IREF2 управления током разрядки.
Согласно сигналу PBC режима рекуперации движения с использованием силовой установки, включенному в управляющий сигнал VC, модуль 83 выбора выбирает IREF2, когда инвертор 50 находится в режиме управления движением с использованием силовой установки, выбирает IREF1, когда инвертор 50 находится в режиме рекуперативного торможения, и выводит IREF2 или IREF1 в качестве команды IREF управления током зарядки и разрядки (значения команды управления током зарядки и разрядки).
Команда IREF управления током зарядки и разрядки вводится в модуль 84 управления током. Помимо команды IREF управления током зарядки и разрядки, которая является командой управления выходным током IB преобразователя 40, выходной ток IB преобразователя, выходное напряжение VB преобразователя и значение EFCD определения напряжения вводятся в модуль 84 управления током. Модуль 84 управления током выполняет, на основе этих сигналов, управление током так, что выходной ток IB преобразователя совпадает с командой IREF управления током зарядки и разрядки, и выводит выходной ток IB преобразователя в качестве сигнала DGC включения/выключения для переключающих элементов. Посредством осуществления управления таким образом преобразователь 40 может выполнять зарядку в и разрядку из установку 60 накопления энергии на основе мощности PSB подавления рекуперации или мощности PLMX движения с использованием силовой установки.
Может использоваться конфигурация, в которой, например, хотя не показано на чертеже, условия усиления от 0 до 1 предоставляются снова между делителем 89 и модулем 87 ограничения, и, например, когда электромоторный вагон движется со скоростью равной или ниже предварительно определенной скорости, усиление задается равным небольшому значению, включающему в себя нуль, а когда электромоторный вагон движется со скоростью выше предварительно определенной скорости, усиление изменяется (например, 1), и верхнее предельное значение IREFMAX тока разрядки регулируется и выводится.
Кроме того, может использоваться конфигурация, в которой когда мощность PLMX движения с использованием силовой установки равна или меньше предварительно определенной абсолютной величины, усиление задается равным небольшому значению, включающему в себя нуль, а когда мощность PLMX движения с использованием силовой установки превышает предварительно определенную абсолютную величину, усиление изменяется (например, 1), и верхнее предельное значение IREFMAX тока разрядки регулируется и выводится.
Таким образом, верхнее предельное значение IREFMAX тока разрядки может регулироваться согласно режиму управления инвертора 50 или режиму движения электромоторного вагона. Следовательно, можно регулировать мощность разрядки из установки 60 накопления энергии в диапазоне мощности PLMX движения с использованием силовой установки. Например, также можно выполнять так называемое управление отсечения пиковых значений, например, для формирования большой мощности разрядки в области, в которой мощность PLMX движения с использованием силовой установки является большой, дополнения потребления мощности инвертора 50 и подавления электроэнергии, принятой из контактного провода 1.
Как пояснено выше, устройство 40 преобразователя согласно этому варианту осуществления включает в себя модуль 46 управления преобразователя, который формирует на основе величины VDTELM подавления, указывающей режим рекуперативного крутящего момента или режим рекуперативной мощности электромотора, команду IREF1 управления током зарядки, с помощью которой устройство 40 преобразователя зарядки установки 60 накопления энергии, формирует команду IREF управления током зарядки и разрядки устройства 40 преобразователя на основе команды IREF1 управления током зарядки и осуществляет управление. Следовательно, когда нагрузка контактного провода 1 снижается относительно рекуперативной мощности, в то время как инвертор 50 выполняет операцию рекуперативного торможения, зарядка (поглощение рекуперативной мощности) электроэнергии в установке 60 накопления энергии может выполняться в ассоциации с формированием величины VDTELM подавления, отвлекаемой на увеличение значения EFCV определения напряжения. Следовательно, поскольку поглощение рекуперативной мощности может выполняться, если величина VDTELM подавления формируется даже в небольшой степени, можно снимать большую энергию торможения и подавлять величину VDTELM подавления. Как результат, поскольку частота подавления рекуперативного тормоза уменьшается, можно подавлять износ механического тормоза.
В системе для определения команды управления током зарядки в установке накопления энергии на основе отклонения между напряжением контактного провода или напряжением конденсатора и предварительно определенным значением, которое является предшествующей конфигурацией, возникает проблема в том, что вследствие влияния ошибки определения детекторов 43a и 53a напряжения контактного провода или детекторов 43b и 53b напряжения конденсатора, соответственно, включенных в инвертор 50 и преобразователь 40, в некотором случае независимо от того факта, что рекуперативный крутящий момент подавляется в инверторе 50, зарядка (поглощение рекуперативной мощности) в установке 60 накопления энергии не выполняется.
В качестве конкретного примера, предполагается, что при идентичном напряжении контактного провода значение EFCD определения напряжения детектора 43b напряжения конденсатора преобразователя 40 меньше значения определения для значения EFCV определения напряжения детектора 53b напряжения конденсатора инвертора 50. Даже в режиме, в котором в то время как инвертор 50 выполняет операцию рекуперативного торможения, нагрузка контактного провода 1 снижается относительно рекуперативной мощности, значение EFCV определения напряжения увеличивается и превышает заданное значение VDL напряжения начала подавления рекуперации, и величина VDTELM подавления формируется, и рекуперативный крутящий момент подавляется согласно увеличению значения EFCV определения напряжения, поскольку значение определения детектора 43b напряжения преобразователя 40 не превышает предварительно определенного заданного значения (например, значения, равного заданному значению VDL напряжения начала подавления рекуперации), в некоторых случаях поглощение рекуперативной мощности в установке 60 накопления энергии может не выполняться.
В конфигурации настоящего изобретения, поскольку зарядка (поглощение рекуперативной мощности) в установке 60 накопления энергии выполняется на основе величины VDTELM подавления из инвертора 50, недостаток, поясненный выше, не возникает. Следовательно, когда величина VDTELM подавления формируется даже в небольшой степени, можно снимать большую энергию торможения и подавлять величину VDTELM подавления. Следовательно, частота подавления рекуперативного тормоза уменьшается, и можно уменьшать рабочую частоту механического тормоза. Как результат, можно уменьшать износ тормозной колодки.
В системе для определения команды управления током зарядки на основе напряжения контактного провода или напряжения конденсатора, которая является предшествующей конфигурацией, существует другая проблема, поясненная ниже.
Значение EFCV определения напряжения инвертора 50 и значение EFCD определения напряжения преобразователя 40 являются, соответственно, значениями, полученными с учетом падения напряжения в дросселях 51 и 41 в отношении напряжения ESV контактного провода (=ESD) для контактного провода 1. Следовательно, когда оба из входного тока ISV инвертора 50 и входного тока ISD преобразователя 40 равны нулю, значение EFCV определения напряжения и значение EFCD определения напряжения равны. Тем не менее, когда входной ток ISV инвертора 50 и входной ток ISD преобразователя 40 не равны нулю при работе, возникают падения напряжения в дросселях 51 и 41. Следовательно, даже при идентичном напряжении контактного провода, разность напряжений возникает между значением EFCV определения напряжения и значением EFCD определения напряжения посредством падений напряжения.
Возникает проблема в том, что вследствие влияния разности напряжений в некотором случае, независимо от того факта, что рекуперативный крутящий момент подавляется в инверторе 50, зарядка (поглощение рекуперативной мощности) в установке 60 накопления энергии не выполняется.
Предполагается, что значение EFCD определения напряжения детектора 43b напряжения конденсатора преобразователя 40 меньше значения EFCV определения напряжения детектора 53b напряжения конденсатора инвертора 50. Даже в режиме, в котором в то время как инвертор 50 выполняет операцию рекуперативного торможения, нагрузка контактного провода 1 снижается относительно рекуперативной мощности, значение EFCV определения напряжения увеличивается и превышает заданное значение VDL напряжения начала подавления рекуперации, и величина VDTELM подавления формируется, и рекуперативный крутящий момент подавляется согласно увеличению значения EFCV определения напряжения, поскольку значение EFCD определения напряжения детектора 43b напряжения преобразователя 40 не превышает предварительно определенное заданное значение (например, значение, равное заданному значению VDL напряжения начала подавления рекуперации), в некоторых случаях поглощение рекуперативной мощности в установке 60 накопления энергии может не выполняться.
В конфигурации настоящего изобретения, поскольку зарядка (поглощение рекуперативной мощности) в установке 60 накопления энергии выполняется на основе величины VDTELM подавления из инвертора 50, недостаток, поясненный выше, не возникает. Следовательно, когда величина VDTELM подавления формируется даже в небольшой степени, можно снимать большую энергию торможения и подавлять величину VDTELM подавления. Следовательно, частота подавления рекуперативного тормоза уменьшается. Следовательно, поскольку можно уменьшать рабочую частоту механического тормоза, можно уменьшать износ тормозной колодки.
В конфигурации настоящего изобретения команда IREF1 управления током зарядки и команда IREF2 управления током разрядки переключаются посредством сигнала PBC режима рекуперации движения с использованием силовой установки в модуле 83 выбора, чтобы формировать команду IREF управления током зарядки и разрядки. Следовательно, можно оптимально формировать и выбирать команду управления током зарядки или команду управления током разрядки согласно режиму управления (режиму движения с использованием силовой установки/режиму рекуперации) инвертора 50 и управлять преобразователем 40.
Идея, которая должна быть учтена относительно формирования команды PREF1 управления мощностью зарядки, поясняется ниже. На фиг.6 приемлемо выполнять модуль 82 формирования команд управления током зарядки так, что команда PREF1 управления мощностью зарядки, которая является командой управления мощностью зарядки в установке 60 накопления энергии, превышает мощность PSB подавления рекуперации.
Причина этого поясняется ниже. Фиг.7 является схемой для пояснения потока мощности в ходе рекуперативного торможения в первом варианте осуществления настоящего изобретения. Как показано на фиг.7, электроэнергия (рекуперативная мощность), выводимая из инвертора 50, задается как PV, электроэнергия (мощность поглощения рекуперации), заряжаемая в установке 60 накопления энергии через преобразователь 40, задается как PD, и электроэнергия (рекуперативная мощность контактного провода), протекающая в контактный провод 1 через токосъемник 2, задается как PP.
Рекуперативная мощность PV является значением, сформированным на основе команды PTR управления рекуперативным крутящим моментом и скорости VEL электромоторного вагона (синонимичной со скоростью вращения электромотора 71). Рекуперативная мощность PV является значением, полученным посредством вычитания мощности PSB подавления рекуперации на основе величины VDTELM подавления и скорости VEL электромоторного вагона (синонимичной со скоростью вращения электромотора 71) из запрошенной рекуперативной мощности PC на основе команды PTRS управления запрошенным рекуперативным крутящим моментом, сформированной на основе сигнала MC управляющей команды и т.п. из ведущего контроллера 10 и скорости VEL электромоторного вагона (синонимичной со скоростью вращения электромотора 71).
На фиг.7, когда величина VDTELM подавления инвертора 50 формируется во время рекуперативного торможения, чтобы уменьшать величину VDTELM подавления до нуля и исключать режим подавления рекуперативного крутящего момента, установка 60 накопления энергии должна только поглощать электроэнергию, равную мощности PSB подавления рекуперации, которая является электроэнергией, которая может не регенерироваться в контактном проводе 1, в качестве мощности PD поглощения рекуперации.
Когда предполагается, что команда PREF1 управления мощностью зарядки задается равной значению мощности PSB подавления рекуперации, режим работы является таким, как пояснено ниже, и устройства не работают так, как намечено выше.
В качестве примера рабочего режима предполагается, что инвертор 50 выполняет операцию рекуперативного торможения при запрошенной рекуперативной мощности PC=1000 кВт в режиме, в котором преобразователь 40 останавливается, и в режиме, в котором рекуперативная нагрузка присутствует в контактном проводе 1 приблизительно на 500 кВт. Рабочий режим на этой стадии является таким, как пояснено ниже.
Запрошенная рекуперативная мощность PC=1000 кВт, рекуперативная мощность PP контактного провода=500 кВт, рекуперативная мощность PV (=PC-PSB)=500 кВт, мощность PSB подавления рекуперации=500 кВт и мощность PD поглощения рекуперации=0 кВт.
Когда работа преобразователя 40 начинается, и преобразователь 40 приводится в действие с помощью команды PREF1 управления мощностью зарядки, заданной как 500 кВт, равной мощности PSB подавления рекуперации, преобразователь 40 выполнен с возможностью заряжать до 500 кВт в установке 60 накопления энергии в качестве мощности PD поглощения рекуперации.
Сразу после этого, когда мощность PD поглощения рекуперации достигает 4500 кВт, рекуперативная нагрузка с точки зрения инвертора 50 увеличивается, рекуперативная мощность увеличивается, и мощность PSB подавления рекуперации снижается с 500 кВт. Тем не менее, поскольку команда PREF1 управления мощностью зарядки также задается равной мощности PSB подавления рекуперации, команда PREF1 управления мощностью зарядки снижается с начальных 500 кВт. Следовательно, мощность PD поглощения рекуперации также снижается с 500 кВт.
В конце концов, мощность PSB подавления рекуперации и мощность PD поглощения рекуперации находятся в равновесии в рабочей точке мощности PSB подавления рекуперации=250 кВт и мощности PD поглощения рекуперации=250 кВт, которая является точкой, в которой мощность PSB подавления рекуперации и мощность PD поглощения рекуперации балансируются. Другими словами, в качестве рабочего режима после равновесия, запрошенная рекуперативная мощность PC=1000 кВт, рекуперативная мощность PP контактного провода=500 кВт, рекуперативная мощность PV (=PC-PSB)=750 кВт, мощность PSB подавления рекуперации=250 кВт и мощность PD поглощения рекуперации=250 кВт. Переход из начального режима в режим равновесия является транзитным явлением, которое возникает в течение чрезвычайно короткого времени (несколько десятков миллисекунд).
Как пояснено выше, когда команда PREF1 управления мощностью зарядки задается равной значению мощности PSB подавления рекуперации, мощность PD поглощения рекуперации является недостаточной, и мощность PSB подавления рекуперации (величина VDTELM подавления) не может уменьшаться до нуля.
Чтобы исключать этот недостаток, желательно задавать команду PREF1 управления мощностью зарядки, превышающую мощность PSB подавления рекуперации. В качестве примера, в следующем пояснении команда PREF1 управления мощностью зарядки задается в девять раз большей мощности PSB подавления рекуперации.
В качестве примера рабочего режима, как в случае, поясненном выше, предполагается, что инвертор 50 выполняет операцию рекуперативного торможения в режиме запрошенной рекуперативной мощности PC=1000 кВт, в режиме, в котором преобразователь 40 останавливается, и в режиме, в котором рекуперативная нагрузка контактного провода 1 составляет 500 кВт. Рабочий режим на этой стадии является идентичным рабочему режиму в вышеуказанном пояснении, а также таким, как пояснено ниже.
Запрошенная рекуперативная мощность PC=1000 кВт, рекуперативная мощность PP контактного провода=500 кВт, рекуперативная мощность PV (=PC-PSB)=500 кВт, мощность PSB подавления рекуперации=500 кВт и мощность PD поглощения рекуперации=0 кВт.
Когда работа преобразователя 40 начинается, и команда PREF1 управления мощностью зарядки задается равной 4500 кВт, что в девять раз превышает PSB, преобразователь 40 выполнен с возможностью заряжать 4500 кВт в установке 60 накопления энергии в качестве мощности PD поглощения рекуперации.
Сразу после этого, когда мощность PD поглощения рекуперации достигает 4500 кВт, рекуперативная нагрузка с точки зрения инвертора 50 увеличивается, рекуперативная мощность увеличивается, и мощность PSB подавления рекуперации снижается с 500 кВт. Согласно снижению мощности PSB подавления рекуперации, команда PREF1 управления мощностью зарядки, заданная в девять раз большей мощности PSB подавления рекуперации также, снижается с 4500 кВт. Следовательно, мощность PD поглощения рекуперации также снижается с 4500 кВт.
В конце концов, мощность PSB подавления рекуперации и мощность PD поглощения рекуперации находятся в равновесии в рабочей точке мощности PSB подавления рекуперации=50 кВт и мощности PD поглощения рекуперации=450 кВт, которая является точкой, в которой мощность PSB подавления рекуперации и мощность PD поглощения рекуперации балансируются. Другими словами, в качестве рабочего режима после равновесия, запрошенная рекуперативная мощность PC=1000 кВт, рекуперативная мощность PP контактного провода=500 кВт, рекуперативная мощность PV (=PC-PSB)=950 кВт, мощность PSB подавления рекуперации=50 кВт и мощность PD поглощения рекуперации=450 кВт.
Переход из начального режима в режим равновесия является транзитным явлением, которое возникает в течение чрезвычайно короткого времени (несколько десятков миллисекунд). Фактически, мощность PD поглощения рекуперации и т.п. не достигает 4500 кВт и быстро переключается в режим равновесия.
Как пояснено выше, можно видеть, что, когда команда PREF1 управления мощностью зарядки задается превышающей мощность PSB подавления рекуперации, по сравнению со временем, когда команда PREF1 управления мощностью зарядки задается равной значению мощности PSB подавления рекуперации, мощность PD поглощения рекуперации является большой, и рекуперативная мощность PV также является большой. Другими словами, когда команда PREF1 управления мощностью зарядки задается превышающей мощность PSB подавления рекуперации, можно уменьшать величину VDTELM подавления инвертора 50 и регенерировать большую мощность относительно запрошенной рекуперативной мощности PC. Можно снимать большую рекуперативную мощность в установке 60 накопления энергии. Следовательно, можно повторно использовать, во время движения с использованием силовой установки и т.п., мощность, собранную в установке 60 накопления энергии, чтобы улучшать свойства энергосбережения устройства управления ходом электромоторного вагона. Поскольку рабочая частота механического тормоза может быть уменьшена, можно уменьшать износ тормозной колодки.
В вышеуказанном пояснении, для простоты пояснения команда PREF1 управления мощностью зарядки задается в девять раз большей мощности PSB подавления рекуперации. Тем не менее, команда PREF1 управления мощностью зарядки не ограничена этим. Желательно задавать команду PREF1 управления мощностью зарядки, превышающую мощность PSB подавления рекуперации, до тех пор пока безопасность системы управления обеспечивается.
В вышеуказанном пояснении поясняется конфигурация для вычисления произведения величины VDTELM подавления, которая является сигналом режима рекуперации, указывающим режим рекуперативного крутящего момента внутри модуля 46 управления преобразователя, и скорости VEL, чтобы формировать мощность PSB подавления рекуперации. Тем не менее, конфигурация, отличная от этой, может приспосабливаться. Например, конфигурация для генерирования мощности PSB подавления рекуперации, которая является сигналом режима рекуперации, в инверторе 50 и вывода мощности PSB подавления в модуль 46 управления преобразователя может приспосабливаться.
Для пояснения, когда величина VDTELM подавления, указывающая режим подавления рекуперативного крутящего момента, и мощность PSB подавления рекуперации, указывающая режим подавления рекуперативной мощности, упоминаются совместно, величина VDTELM подавления и мощность PSB подавления рекуперации описываются как сигнал режима рекуперации.
Помимо способа прямого ввода сигнала подавления рекуперации из инвертора 50 в преобразователь 40, поясненного выше, может приспосабливаться конфигурация, в которой инвертор 50 передает сигнал режима рекуперации в непоказанное внешнее устройство общего управления, и устройство общего управления передает сигнал режима рекуперации инвертора 50 в преобразователь 40.
Второй вариант осуществления
Фиг.8 является схемой примера конфигурации модуля 82 формирования команд управления током зарядки во втором варианте осуществления настоящего изобретения. Как показано на фиг.8, модуль 82 формирования команд управления током зарядки включает в себя модуль 82b вычисления команд управления током зарядки. Таким образом, конфигурация для формирования команды IREF1 управления током зарядки непосредственно из мощности PSB подавления рекуперации через таблицу усилений может приспосабливаться.
Как пояснено выше, модуль 82 формирования команд управления током зарядки согласно этому варианту осуществления формирует, с помощью модуля 82b вычисления команд управления током зарядки, команду IREF1 управления током зарядки из команды PSB управления подавлением рекуперации. Следовательно, можно исключать делитель 88, присутствующий в первом варианте осуществления, и реализовывать упрощение модуля вычисления.
Третий вариант осуществления
Фиг.9 является схемой примера конфигурации модуля 82 формирования команд управления током зарядки в третьем варианте осуществления настоящего изобретения. Как показано на фиг.9, можно конфигурировать модуль 82 формирования команд управления током зарядки из пропорционально-интегрального контроллера 82c, ввода мощности PSB подавления рекуперации и формирования команды IREF1 управления током зарядки через пропорционально-интегральный элемент.
Как пояснено выше, модуль 82 формирования команд управления током зарядки согласно этому варианту осуществления формирует, с помощью пропорционально-интегрального контроллера 82c, команду IREF1 управления током зарядки из мощности PSB подавления рекуперации. Следовательно, по сравнению с примером конфигурации первого варианта осуществления, можно формировать команду IREF1 управления током зарядки, которая задает мощность PSB подавления рекуперации полностью нулевой. Следовательно, можно снимать большую рекуперативную мощность в установке 60 накопления энергии.
Четвертый вариант осуществления
Фиг.10 является схемой примера конфигурации в электромоторном вагоне, включающем в себя множество устройств инвертора и устройств преобразователя в четвертом варианте осуществления настоящего изобретения. На фиг.10 показан пример, в котором железнодорожный состав включает в себя четыре электромоторных вагона. Железнодорожный состав включает в себя первый вагон 101, второй вагон 102, третий вагон 103 и четвертый вагон 104.
Первое устройство 40-1 преобразователя и первая установка 61 накопления энергии установлены на первом вагоне 101. Первое устройство 50-1 инвертора устанавливается на втором вагоне 102. Второе устройство 50-2 инвертора устанавливается на третьем вагоне 103. Второе устройство 40-2 преобразователя и вторая установка 62 накопления энергии установлены на четвертом вагоне.
Конфигурации первого устройства 40-1 преобразователя, первой установки 61 накопления энергии, первого устройства 50-1 инвертора, второго устройства 50-2 инвертора, второго устройства 40-2 преобразователя и второй установки 62 накопления энергии являются идентичными конфигурациям устройства 40 преобразователя, устройства 50 инвертора и установка 60 накопления энергии, поясненных в первом варианте осуществления, за исключением секций, поясненные ниже.
В этом варианте осуществления поясняется пример конфигурации, в котором два устройства инвертора, два устройства преобразователя и две установки накопления энергии установлены в четырех электромоторных вагонах. Тем не менее, число и конфигурации устройств не ограничены этим. Эта идея может применяться до тех пор, пока электромоторные вагоны включают в себя множество устройств преобразователя, множество устройств инвертора и множество установок накопления энергии.
Устройства 40-1 и 40-2 преобразователя и установки 61 и 62 накопления энергии подключаются так, как поясняется в первом варианте осуществления. Контактные выводы P1 положительного плеча устройств 40-1 и 40-2 преобразователя и контактные выводы P положительного плеча устройств 50-1 и 50-2 инвертора подключаются к контактному проводу 1 совместно через токосъемник 2. Контактные выводы N1 отрицательного плеча устройств 40-1 и 40-2 преобразователя и контактные выводы N отрицательного плеча устройств 50-1 и 50-2 инвертора подключаются к рельсу 4 совместно через колеса 3.
Управляющие сигналы VC1 и VC2, соответственно, выводятся из устройств 50-1 и 50-2 инвертора и, соответственно, вводятся в устройства 40-1 преобразователя и устройство 40-2 преобразователя. Содержимое управляющих сигналов VC1 и VC2 является идентичным содержимому управляющего сигнала VC, поясненного в первом варианте осуществления.
Фиг.11 является схемой примера конфигурации модуля 46a управления преобразователя в четвертом варианте осуществления. Модуль 46a управления преобразователя, показанный на фиг.11, установлен на каждом из преобразователей 40-1 и 40-2. Как показано на фиг.11, величина VDTELM1 подавления, включенная в команду VC1 управления, и величина VDTELM2 подавления, включенная в команду VC2 управления, вводятся в модуль 46a управления преобразователя. Сумматор 110 вычисляет сумму величин VDTELM1 и VDTELM2 подавления и формирует величину VDTELM подавления. Умножитель 81 умножает величину VDTELM подавления и скорость VEL между собой и формирует и выводит мощность PSB подавления рекуперации. Операции не рассматриваются, поскольку операции поясняются в первом варианте осуществления.
Сигнал PBC1 режима рекуперации движения с использованием силовой установки, включенный в команду VC1 управления, и сигнал PBC2 режима рекуперации движения с использованием силовой установки, включенный в команду VC2 управления, вводятся в модуль 46a управления преобразователя. Схема 113 OR вычисляет OR для сигналов PBC1 и PBC2 режима рекуперации движения с использованием силовой установки и формирует сигнал PBC режима рекуперации движения с использованием силовой установки. Операции поясняются в первом варианте осуществления.
Дополнительно, входной ток ISV1 и напряжение ESV1 контактного провода инверторов 50-1 и 50-2, включенные в команду VC1 управления, и входной ток ISV2 и напряжение ESV2 контактного провода инверторов 50-1 и 50-2, включенные в команду VC2 управления, вводятся в модуль 46a управления преобразователя. Сумматор 111 вычисляет сумму входного тока ISV1 и входного тока ISV2 и выводит результат вычисления в качестве входного тока ISV. Сумматор 112 вычисляет сумму напряжения ESV1 контактного провода и напряжения ESV2 контактного провода. Делитель 114 делит результат вычисления на два (число преобразователей 40 в железнодорожном составе), чтобы усреднять результат, и выводит усредненный результат в качестве напряжения ESV контактного провода. Умножитель 85 умножает входной ток ISV и напряжение ESV контактного провода между собой. Делитель 115 делит результат умножения на два (число преобразователей 40 в железнодорожном составе), чтобы усреднять результат, и формирует мощность PLMX движения с использованием силовой установки.
Команда IREF управления током зарядки и разрядки формируется, как в первом варианте осуществления, с использованием мощности PSB подавления рекуперации, сигнала PBC режима рекуперации движения с использованием силовой установки и мощности PLMX движения с использованием силовой установки, сформированной так, как пояснено выше, чтобы управлять преобразователем 40.
Посредством конфигурирования устройства управления хором электромоторного вагона так, как пояснено выше, предусмотрены эффекты, поясненные ниже, по сравнению с примером предшествующей конфигурации. В системе для определения команды управления током зарядки в установку накопления энергии на основе отклонения между напряжением контактного провода или напряжением конденсатора и предварительно определенным значением, которая является предшествующей конфигурацией, когда множество устройств инвертора, устройств преобразователя, установок накопления энергии присутствуют в железнодорожном составе, величина подавления рекуперативного крутящего момента устройств инвертора и мощность поглощения рекуперации устройств преобразователя управляются в отношении напряжения контактного провода, которое соответствующие устройства по отдельности имеют, или напряжения определения детекторов напряжения конденсатора. Тем не менее, как пояснено выше, возникает ошибка в значениях определения детекторов напряжения. Следовательно, когда напряжение контактного провода или напряжение конденсатора повышаются в ходе рекуперативного торможения, соотношение между напряжением контактного провода или напряжением конденсатора и предварительно определенным заданным значением (превышает или нет напряжение контактного провода или напряжение конденсатора предварительно определенное заданное значение, либо степень избыточности) отличается для каждого из устройств. Следовательно, значения тока поглощения рекуперации устройств преобразователя колеблются, и возникает дисбаланс в рабочих режимах устройств преобразователя и установок накопления энергии. Другими словами, даже в системе, подключенной к идентичному контактному проводу 1, устройство преобразователя, включающее в себя детектор напряжения, который определяет, что напряжение контактного провода или напряжение конденсатора ниже истинного значения, имеет небольшую мощность поглощения рекуперации, и устройство преобразователя, включающее в себя детектор напряжения, который определяет, что напряжение контактного провода или напряжение конденсатора выше истинного значения, имеет большую мощность поглощения рекуперации.
Когда напряжение контактного провода или напряжение конденсатора имеют предварительно определенно заданное значение, существует устройство преобразователя, значение определения которого превышает предварительно определенное заданное значение, и устройство преобразователя, значение определения которого ниже предварительно определенного заданного значения. В некотором случае только часть устройств преобразователя выполняет операцию поглощения рекуперативной мощности и изменение рабочего режима. Когда неустойчивость возникает в рабочих режимах устройств преобразователя и установок накопления энергии таким образом, возникает проблема в том, что, например, срок службы устройств, которые зачастую находятся в рабочем режиме, сокращается.
В некотором случае, независимо от того факта, что напряжение конденсатора превышает предварительно определенное заданное значение, в то время как инвертор выполняет рекуперативное торможение, и величина подавления рекуперативного крутящего момента формируется, напряжение конденсатора устройства преобразователя ниже предварительно определенного заданного значения, и устройство преобразователя не выполняет операцию поглощения рекуперативной мощности. В таком случае, поскольку рекуперативный крутящий момент сохраняется излишне подавленным, возникают износ колодки механического тормоза и потери рекуперативной мощности.
В конфигурации, поясненной в четвертом варианте осуществления, когда инверторы 50-1 и 50-2, соответственно, формируют различные величины VDTELM подавления вследствие, например, неустойчивости в характеристиках определения соответствующих детекторов 53b напряжения инверторов 50-1 и 50-2, преобразователи 40-1 и 40-2 могут, соответственно, формировать команды IREF1 управления током зарядки, эквивалентные сумме величин VDTELM подавления инверторов 50-1 и 50-2. Следовательно, соответствующие преобразователи 40-1 и 40-2 могут в равной степени совместно использовать электроэнергию поглощения рекуперации. Здесь, поскольку мощности PD поглощения рекуперации преобразователей 40-1 и 40-2 равны, можно задавать рабочие режимы преобразователей 40-1 и 40-2 и установки 60 накопления энергии одинаковыми. Можно не допускать концентрации нагрузок на часть преобразователей 40-1 и 40-2 и установки 60 накопления энергии.
В момент, когда величина VDTELM подавления формируется в любом из инверторов 50-1 и 50-2, преобразователи 40 могут, соответственно, формировать команды IREF1 управления током зарядки и выполнять поглощение рекуперативной мощности в преобразователях 40-1 и 40-2 и установке 60 накопления энергии. Следовательно, можно предотвращать изменение рабочего режима только части устройств преобразователя.
Как пояснено выше, в устройстве управления ходом электромоторного вагона согласно этому варианту осуществления, преобразователи 40-1 и 40-2 формируют команды IREF1 управления током зарядки с использованием величин VDTELM подавления инверторов 50-1 и 50-2 в качестве ввода. Следовательно, даже когда инверторы 50-1 и 50-2, преобразователи 40-1 и 40-2 и установка 60 накопления энергии установлены в железнодорожном составе, включающем в себя множество вагонов, можно снимать большую рекуперативную мощность в установке 60 накопления энергии. Следовательно, когда электроэнергия, собранная в установке 60 накопления энергии, повторно используется во время движения с использованием силовой установки и т.п., можно повышать энергосбережение устройства управления ходом электромоторного вагона и уменьшать рабочую частоту механического тормоза. Следовательно, можно уменьшать износ тормозной колодки. Дополнительно, можно предотвращать изменение рабочего режима только части устройств преобразователя и не допускать концентрации нагрузок на части преобразователей 40 и установке 60 накопления энергии. Следовательно, можно разрешать проблему, такую как меньший срок службы устройств вследствие неустойчивости в рабочих режимах.
Выше поясняется конфигурация для генерирования мощности PSB подавления рекуперации в модуле 46a управления преобразователя на основе произведения величины VDTELM подавления и скорости VEL. Тем не менее, конфигурация, отличная от этой, может использоваться. Например, может использоваться конфигурация для генерирования мощности PSB подавления рекуперации внутри инвертора 50 и вывода мощности PSB подавления в модуль 46a управления преобразователя.
На фиг.11 модуль 46a управления преобразователя вычисляет сумму величины VDTELM1 подавления, которая является сигналом режима рекуперации, включенным в команду VC1 управления, и величины VDTELM2 подавления, которая является сигналом режима рекуперации, включенным в команду VC2 управления, и формирует величину VDTELM подавления. Тем не менее, модуль 46a управления преобразователя может извлекать больший из сигнала режима рекуперации, включенного в команду VC1 управления, и сигнала режима рекуперации, включенного в команду VC2 управления, и приспосабливать сигнал режима рекуперации в качестве сигнала режима рекуперации, используемого для управления.
Даже если устройство управления ходом электромоторного вагона выполнено таким образом, в момент, когда величина VDTELM подавления формируется в любом из инверторов 50, преобразователи 40 могут, соответственно, формировать команды IREF1 управления током зарядки и выполнять поглощение рекуперативной мощности в преобразователях 40 и установке 60 накопления энергии. Следовательно, можно предотвращать изменение рабочего режима только части устройств преобразователя.
Дополнительно, на фиг.11 модуль 46a управления преобразователя вычисляет сумму величины VDTELM1 подавления, которая является сигналом режима рекуперации, включенным в команду VC1 управления, и величины VDTELM2 подавления, которая является сигналом режима рекуперации, включенным в команду VC2 управления, и формирует величину VDTELM подавления. Тем не менее, модуль 46a управления преобразователя может вычислять среднее сигнала режима рекуперации, включенного в команду VC1 управления, и сигнала режима рекуперации, включенного в команду VC2 управления, и приспосабливать среднее в качестве сигнала режима рекуперации, используемого для управления.
Даже если устройство управления ходом электромоторного вагона выполнено таким образом, в момент, когда величина VDTELM подавления формируется в любом из инверторов 50, преобразователи 40 могут, соответственно, формировать команды IREF1 управления током зарядки и выполнять поглощение рекуперативной мощности в преобразователях 40 и установке 60 накопления энергии. Следовательно, можно предотвращать изменение рабочего режима только части устройств преобразователя.
Кроме того, кроме способа, поясненного выше для того, чтобы непосредственно вводить сигналы режима рекуперации инверторов 50 из инверторов 50 в преобразователи 40, может использоваться конфигурация, в которой инверторы 50 передают сигналы режима рекуперации в непоказанное внешнее устройство общего управления, и устройство общего управления передает сигналы режима рекуперации инверторов 50 в преобразователи 40. Таким образом, по сравнению с соединением соответствующих инверторов 50 и соответствующих преобразователей 40 посредством проводов, можно сокращать число проводов, которые соединяют инверторы 50 и преобразователи 40.
Может использоваться конфигурация, в которой устройство общего управления выполняет сложение сигналов режима рекуперации инверторов 50, извлечение максимума, вычисление среднего и т.п. и передает результаты вычислений в модули 46a управления преобразователя. Таким образом, модуль 46a управления преобразователя не должен выполнять сложение, извлечение максимума и вычисление среднего, соответствующего числу инверторов. Следовательно, можно уменьшать вычислительную сложность. Дополнительно, поскольку разность в конфигурации вычисления (разность в знаменателе при вычислении среднего и т.д.) вследствие неустойчивости в числе инверторов 50 в железнодорожном составе может поглощаться на стороне устройства общего управления. Следовательно, можно задавать конфигурацию модулей 46a управления преобразователя идентичной.
Варианты осуществления настоящего изобретения не ограничены конфигурациями, поясненными выше. Варианты осуществления только должны быть конфигурацией, в которой модули 46a управления преобразователя могут сами распознавать сигналы режима рекуперации, которые являются величинами, указывающими режимы подавления рекуперативного крутящего момента или режимы подавления рекуперативной мощности инверторов 50, либо прибавленное значение, максимум, среднее и т.п., полученное на основе сигналов режима рекуперации.
В конфигурации, поясненной выше, входной ток ISV1 инвертора 50, включенный в команду VC1 управления, и входной ток ISV2 инвертора 50, включенный в команду VC2 управления, вводятся в модуль 46a управления преобразователя. Модуль 46a управления преобразователя вычисляет мощность PLMX движения с использованием силовой установки на основе среднего входного тока ISV1 и входного тока ISV2. Тем не менее, может использоваться конфигурация, в которой входные токи передаются из инверторов 50 во внешнее устройство общего управления, и устройство общего управления вычисляет среднее входного тока, вычисляет мощность PLMX движения с использованием силовой установки на основе вычисленного среднего и выводит мощность PLMX движения с использованием силовой установки в модули 46a управления преобразователя.
Таким образом, модуль 46a управления преобразователя не должен вычислять среднее, соответствующее числу преобразователей 40. Следовательно, можно уменьшать вычислительную сложность. Дополнительно, поскольку разность в конфигурации вычисления (разность в знаменателе при вычислении среднего и т.д.) вследствие неустойчивости в числе преобразователей 40 в железнодорожном составе может поглощаться на стороне устройства общего управления. Следовательно, можно задавать конфигурацию модулей 46a управления преобразователя идентичной.
Когда множество наборов инвертора 50 и электромотора 71 присутствует, модуль 46a управления преобразователя предпочтительно выполнен с возможностью формировать команду IREF2 управления током разрядки на основе суммы входных мощностей инверторов 50.
Когда имеется множество наборов преобразователя 40 и установка 60 накопления энергии, соответствующие модули 46a управления преобразователя предпочтительно формируют команды IREF2 управления током разрядки на основе значения, полученного посредством усреднения мощностей инвертора 50 с числом преобразователей 40.
Когда имеется множество наборов преобразователя 40 и установка 60 накопления энергии, и имеется множество наборов инвертора 50 и электромотора 71, соответствующие модули 46a управления преобразователя предпочтительно формируют команды IREF2 управления током разрядки на основе суммы входных мощностей инверторов 50, вводимой в модули 46a управления преобразователя.
Когда имеется множество наборов преобразователя 40 и установка 60 накопления энергии, и имеется множество наборов инвертора 50 и электромотор 71, соответствующие модули 46a управления преобразователя предпочтительно формируют команды IREF2 управления током разрядки на основе суммы входных мощностей инверторов 50, вводимой в модули 46a управления преобразователя.
Инвертор 50, преобразователь 40 и установка 60 накопления энергии проиллюстрированы и пояснены в качестве отдельных устройств. Тем не менее, когда эти устройства размещаются в одном кожухе, устройства могут быть выполнены как интегрированное устройство.
В конфигурациях, поясненных в вариантах осуществления, например, как показано на фиг.4(a), сигнал MC управляющей команды вводится в модуль 56a формирования команд управления крутящим моментом, и модуль 56a формирования команд управления крутящим моментом формирует на основе, например, команды управления тормозной силой, включенной в сигнал MC управляющей команды, команду PTRS управления запрошенным рекуперативным крутящим моментом, которая является командой управления крутящим моментом рекуперативного торможения, которую должен формировать электромотор 71. Команда PTRS управления запрошенным рекуперативным крутящим моментом и величина VDTELM подавления вводятся в модуль 56d вычитания, и модуль 56d вычитания вычисляет разность между командой PTRS управления запрошенным рекуперативным крутящим моментом и величиной VDTELM подавления и выводит разность в качестве команды PTR управления рекуперативным крутящим моментом. Команда PTR управления рекуперативным крутящим моментом вводится в модуль 56e управления крутящим моментом, и модуль 56e управления крутящим моментом формирует на основе команды PTR управления рекуперативным крутящим моментом сигнал IGC включения/выключения в схему 55 инвертора, так что рекуперативные крутящие моменты, сформированные посредством электромотора 71, совпадают с командой PTR управления рекуперативным крутящим моментом. Другими словами, конфигурация для управления крутящим моментом электромотора требуемым образом на основе сигнала MC управляющей команды и значения EFCV определения напряжения поясняется.
Как известно специалистам в данной области техники, крутящий момент электромотора непосредственно связан с электрическим током электромотора. Следовательно, например, как показано на фиг.4(a), можно заменять конфигурацию для управления крутящим моментом, поясненного выше, на конфигурацию для управления электрическим током электромотора 71. Другими словами, изобретение может быть выполнено, даже если величина, эквивалентная крутящему моменту, заменяется величиной, эквивалентной электрическому току электромотора 71. В этом случае модуль 56a формирования команд управления крутящим моментом интерпретируется как модуль 56a формирования команд управления током. Аналогично, команда PTRS управления запрошенным рекуперативным крутящим моментом интерпретируется как команда PIRS управления запрашиваемым рекуперативным током, команда PTR управления рекуперативным крутящим моментом интерпретируется как команда PIR управления рекуперативным током, и модуль 56e управления крутящим моментом интерпретируется как модуль 56e управления током.
Следовательно, величина VDTELM подавления, указывающая режим подавления рекуперативного крутящего момента, который является сигналом режима рекуперации, также является величиной, указывающей режим подавления рекуперативного тока.
Само собой разумеется, что конфигурации, поясненные в вариантах осуществления, указывают примеры выполнения настоящего изобретения и могут комбинироваться с другой общеизвестной технологией, или часть конфигураций может изменяться, например, опускаться без отступления от сущности настоящего изобретения.
Промышленная применимость
Как пояснено выше, настоящее изобретение может применяться к устройству управления ходом электромоторного вагона, для которого используется установка накопления энергии, и, в частности, является полезным в качестве изобретения, которое может эффективно выполнять съем рекуперативной мощности, сформированной в ходе рекуперативного торможения в установке накопления энергии.
Список номеров ссылок
1 - контактный провод
2 - токосъемник
3 - колесо
4 - рельс
10 - ведущий контроллер
40 - устройство преобразователя
40-1 - первое устройство преобразователя
40-2 - второе устройство преобразователя
41, 51 - дроссели
42, 52 - конденсаторы фильтра
43a, 43b, 43c, 53a, 53b - детекторы напряжения
44 - схема преобразователя
44H, 44L - переключающие элементы
45 - сглаживающий дроссель
46, 46a - модули управления преобразователя
47, 57 - детекторы тока
50 - устройство инвертора
50-1 - первое устройство инвертора
50-2 - второе устройство инвертора
54U, 54V, 54W, 54X, 54Y, 54Z - переключающие элементы
55 - схема инвертора
56 - модуль управления инвертора
56a - модуль формирования команд управления крутящим моментом, модуль формирования команд управления током
56b, 56d - модули вычитания
56bb - модуль ограничения с отсечением отрицательных значений
56c - модуль усиления
56e - модуль управления крутящим моментом, модуль управления током
60 - установка накопления энергии
61 - первая установка накопления энергии
62 - вторая установка накопления энергии
71 - электромотор
81, 85 - умножители
82 - модуль формирования команд управления током зарядки
82a - модуль вычисления команд управления мощностью зарядки
82b - модуль вычисления команд управления током зарядки
82c - пропорционально-интегральный контроллер
83 - модуль выбора
84 - модуль управления током
86 - модуль задания максимального тока разрядки
87 - модуль ограничения
88, 89 - делители
101 - первый вагон
102 - второй вагон
103 - третий вагон
104 - четвертый вагон
110, 111, 112 - сумматоры
113 - схема OR
114, 115 - делители
DGC, IGC - сигналы включения/выключения
EFCD, EFCV - значения определения напряжения конденсатора фильтра
ESD, ESV, ESV1, ESV2 - напряжения контактного провода
IB - выходной ток преобразователя
IBM - максимальное заданное значение тока разрядки (допустимое максимальное значение тока)
IREF - команда управления током зарядки и разрядки (значение команды управления током зарядки и разрядки)
IREF1 - команда управления током зарядки (значение команды управления током зарядки)
IREF2 - команда управления током разрядки (значение команды управления током разрядки)
IREFMAX - верхнее предельное значение тока разрядки
ISV, ISV1, ISV2 - входные токи
MC - сигнал управляющей команды
N, NI - контактные выводы отрицательного плеча
P, P1 - контактные выводы положительного плеча
P2, N2 - выходные контактные выводы постоянного тока
PBC, PBC1, PBC2 - сигналы режима рекуперации движения с использованием силовой установки (сигналы режима инвертора)
PC - запрашиваемая рекуперативная мощность
PD - мощность поглощения рекуперации
PLMX - мощность движения с использованием силовой установки
PP - рекуперативная мощность контактного провода
PREF1 - команда управления мощностью зарядки
PSB - мощность подавления рекуперации
PTR - команда управления рекуперативным крутящим моментом
PIR - команда управления рекуперативным током
PTRS - команда управления запрошенным рекуперативным крутящим моментом
PIRS - команда управления запрошенным рекуперативным током
PV - рекуперативная мощность
VB - выходное напряжение преобразователя
VC, VC1, VC2 - управляющие сигналы
VDL - заданное значение напряжения начала подавления рекуперации
VDTELM, VDTELM1, VDTELM2 - величины подавления рекуперативного крутящего момента (сигналы режима рекуперации)
VEL - скорость

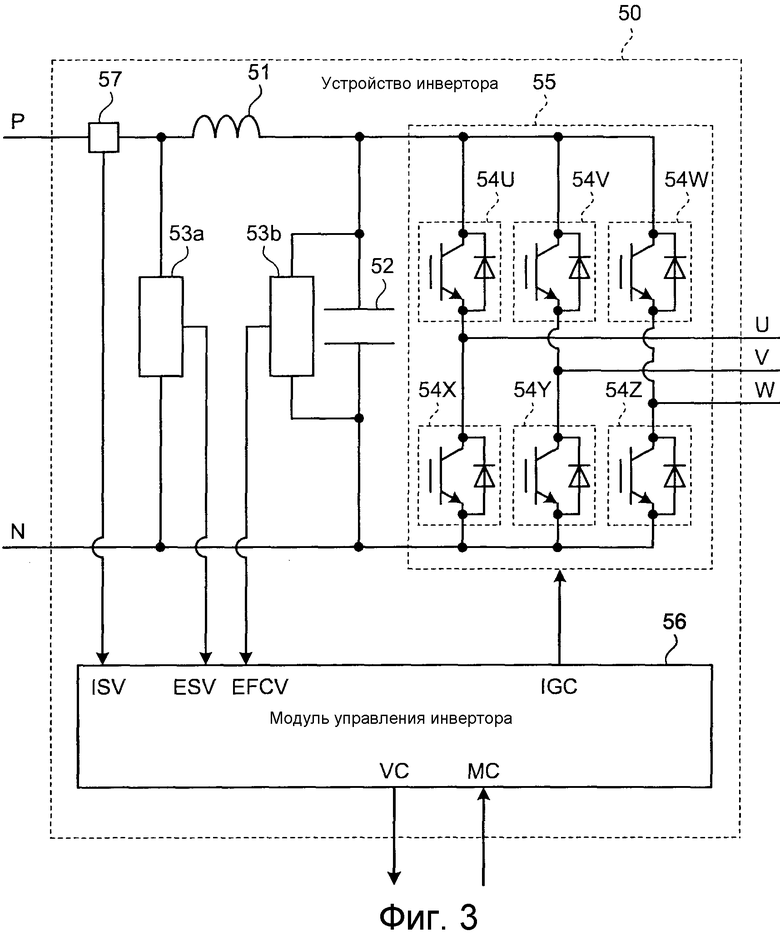


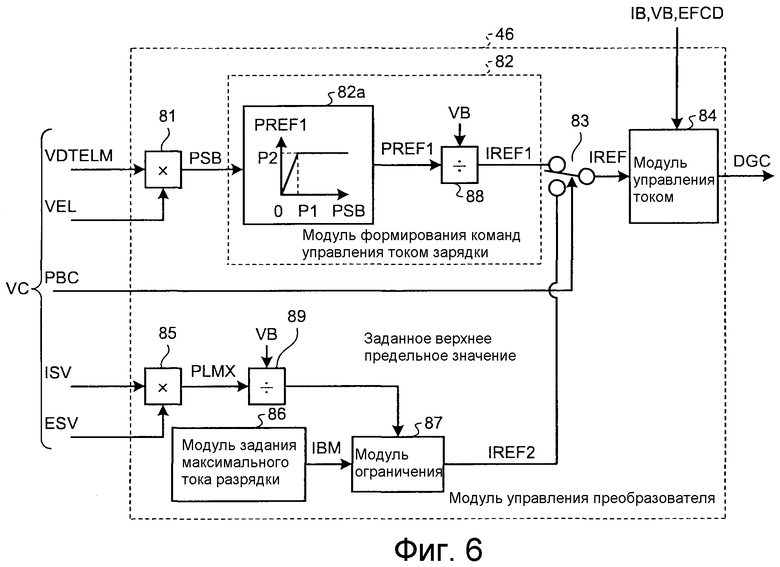




Устройство управления ходом электромоторного вагона включает в себя: устройство (50) инвертора, подключенное к источнику питания постоянного тока; электромотор (71), подключенный к выводу устройства инвертора; устройство (40) преобразователя, подключенное к вводу устройства инвертора; и установку (60) накопления энергии, подключенную к выводу устройства преобразователя. Устройство управления ходом электромоторного вагона выполнено с возможностью разряжать часть мощности движения или рекуперативную мощность электромотора из установки накопления энергии или заряжать часть мощности движения или рекуперативной мощности в установке накопления энергии. Устройство преобразователя включает в себя модуль управления преобразователя, который формирует на основе сигнала режима рекуперации в качестве сигнала, указывающего режим подавления рекуперативной мощности или рекуперативного крутящего момента, или рекуперативного тока, эквивалентного рекуперативной мощности, значение команды управления током зарядки, которое является значением команды управления электрического тока, с помощью которого устройство преобразователя заряжает установку накопления энергии, формирует значение команды управления током зарядки. Технический результат заключается в повышении устойчивости в рабочих режимах устройств преобразователя и установок накопления энергии. 4 н. и 10 з.п. ф-лы, 11 ил.
1. Устройство управления ходом электромоторного вагона, содержащее: устройство (50) инвертора, подключенное к источнику питания постоянного тока, электромотор (71), подключенный к выводу устройства инвертора, устройство (40) преобразователя, подключенное к вводу устройства инвертора, и установку (60) накопления энергии, подключенную к выводу устройства преобразователя, причем устройство управления ходом электромоторного вагона конфигурировано с возможностью разряжать часть мощности движения или рекуперативной мощности электромотора из установки накопления энергии или заряжать часть мощности движения или рекуперативной мощности в установку накопления энергии, при этом устройство преобразователя включает в себя модуль (46) управления преобразователя, который формирует на основе сигнала режима рекуперации в качестве сигнала, указывающего режим управления подавлением рекуперативной мощности, или рекуперативного крутящего момента, или рекуперативного тока, эквивалентного рекуперативной мощности, значение команды управления током зарядки, которое является значением команды управления электрического тока, с помощью которого устройство преобразователя заряжает установку накопления энергии, формирует значение команды управления током зарядки и разрядки устройства преобразователя на основе значения команды управления током зарядки и осуществляет управление, и, когда имеется множество наборов из устройства (50-1, 50-2) инвертора и электромотора (71), модуль (46) управления преобразователя формирует значение команды управления током зарядки на основе сигналов режима рекуперации множества устройств инвертора.
2. Устройство управления ходом электромоторного вагона, содержащее: устройство (50) инвертора, подключенное к источнику питания постоянного тока, электромотор (71), подключенный к выводу устройства инвертора, устройство (40) преобразователя, подключенное к вводу устройства инвертора, и установку (60) накопления энергии, подключенную к выводу устройства преобразователя, причем устройство управления ходом электромоторного вагона конфигурировано с возможностью разряжать часть мощности движения или рекуперативной мощности электромотора из установки накопления энергии или заряжать часть мощности движения или рекуперативной мощности в установку накопления энергии, при этом устройство преобразователя включает в себя модуль (46) управления преобразователя, который формирует на основе сигнала режима рекуперации в качестве сигнала, указывающего режим управления подавлением рекуперативной мощности, или рекуперативного крутящего момента, или рекуперативного тока, эквивалентного рекуперативной мощности, значение команды управления током зарядки, которое является значением команды управления электрического тока, с помощью которого устройство преобразователя заряжает установку накопления энергии, формирует значение команды управления током зарядки и разрядки устройства преобразователя на основе значения команды управления током зарядки и осуществляет управление, и, когда имеется множество наборов из устройства (40-1, 40-2) преобразователя и установка (60) накопления энергии и имеется множество наборов из устройства (50-1, 50-2) инвертора и электромотора, каждый из множества из модулей (46а) управления преобразователя формирует значение команды управления током зарядки на основе сигналов режима рекуперации множества устройств инвертора.
3. Устройство управления ходом электромоторного вагона, содержащее: устройство (50) инвертора, подключенное к источнику питания постоянного тока, электромотор (71), подключенный к выводу устройства инвертора, устройство (40) преобразователя, подключенное к вводу устройства инвертора, и установку (60) накопления энергии, подключенную к выводу устройства преобразователя, причем устройство управления ходом электромоторного вагона конфигурировано с возможностью заряжать часть мощности движения или рекуперативной мощности электромотора в установку накопления энергии или разряжать часть мощности движения установки или рекуперативной мощности из установки накопления энергии, при этом устройство преобразователя включает в себя модуль (46) управления преобразователя, который формирует на основе входной мощности устройства инвертора значение команды управления током разрядки, которое является значением команды управления электрического тока, с помощью которого устройство преобразователя разряжает установку накопления энергии, формирует значение команды управления током зарядки и разрядки устройства преобразователя на основе значения команды управления током разрядки и осуществляет управление.
4. Устройство управления ходом электромоторного вагона по п.3, в котором модуль управления преобразователя формирует верхнее предельное значение тока разрядки на основе входной мощности устройства инвертора и формирует меньшее из допустимого максимального значения тока установки накопления энергии и верхнего предельного значения тока разрядки в качестве значения команды управления током разрядки.
5. Устройство управления ходом электромоторного вагона по п.3, в котором, когда имеется множество наборов из устройства (50-1, 50-2) инвертора и электромотора (71), модуль управления преобразователя формирует значение команды управления током разрядки на основе суммы входных мощностей множества устройств инвертора.
6. Устройство управления ходом электромоторного вагона по п.3, в котором, когда имеется множество наборов из устройства (40-1, 40-2) преобразователя и установки (60) накопления энергии, каждый из множества модулей (46а) управления преобразователя формирует значение команды управления током разрядки на основе значения, полученного посредством усреднения входной мощности устройства инвертора с числом устройств преобразователя.
7. Устройство управления ходом электромоторного вагона по п.3, в котором, когда имеется множество наборов из устройства (40-1, 40-2) преобразователя и установки (60) накопления энергии и имеется множество наборов из устройства (50-1, 50-2) инвертора и электромотора (71), каждый из множества (46а) модулей управления преобразователя формирует значение команды управления током разрядки на основе суммы входных мощностей множества устройств инвертора, вводимых в модуль управления преобразователя.
8. Устройство управления ходом электромоторного вагона по п.3, в котором, когда имеется множество наборов из устройства (40-1, 40-2) преобразователя и установки (60) накопления энергии и имеется множество наборов из устройства (50-1, 50-2) инвертора и электромотора (71), каждый из множества модулей (46а) управления преобразователя формирует значение команды управления током разрядки на основе значения, полученного посредством усреднения, числом устройств преобразователя, суммы входных мощностей множества устройств инвертора, вводимых в модуль управления преобразователя.
9. Устройство управления ходом электромоторного вагона по п.1 или 3, в котором модуль (46) управления преобразователя выполнен с возможностью принимать ввод сигнала режима инвертора, указывающего рабочий режим движения с использованием силовой установки или рабочий режим рекуперации устройства инвертора, выбирать любое из значения команды управления током зарядки и значения команды управления током разрядки на основе сигнала режима инвертора и формировать значение команды управления током зарядки и разрядки.
10. Устройство управления ходом электромоторного вагона, содержащее: устройство (50) инвертора, подключенное к источнику питания постоянного тока, электромотор (71), подключенный к выводу устройства инвертора, устройство (40) преобразователя, подключенное к вводу устройства инвертора, и установку (60) накопления энергии, подключенную к выводу устройства преобразователя, причем устройство управления ходом электромоторного вагона конфигурировано с возможностью разряжать часть мощности движения или рекуперативной мощности электромотора из установки накопления энергии или заряжать часть мощности движения или рекуперативной мощности в установке накопления энергии, при этом устройство преобразователя включает в себя модуль (46) управления преобразователя, который формирует на основе сигнала режима рекуперации в качестве сигнала, указывающего режим управления подавлением рекуперативной мощности, или рекуперативного крутящего момента, или рекуперативного тока, эквивалентного рекуперативной мощности, значение команды управления током зарядки, которое является значением команды управления электрического тока, с помощью которого устройство преобразователя заряжает установку накопления энергии, формирует значение команды управления током зарядки и разрядки устройства преобразователя на основе значения команды управления током зарядки и осуществляет управление.
11. Устройство управления ходом электромоторного вагона по п.10, в котором сигнал режима рекуперации является величиной подавления рекуперативной мощности, которая является величиной, с помощью которой устройство инвертора подавляет, от предварительно определенного значения, рекуперативную мощность, сформированную посредством электромотора, величиной подавления рекуперативного крутящего момента, которая является величиной, с помощью которой устройство инвертора подавляет, от предварительно определенного значения, рекуперативный крутящий момент, эквивалентный величине подавления рекуперативной мощности, или величиной подавления рекуперативного тока, которая является величиной, с помощью которой устройство инвертора подавляет, от предварительно определенного значения, рекуперативный ток, эквивалентный величине подавления рекуперативной мощности.
12. Устройство управления ходом электромоторного вагона по п.10, в котором модуль управления преобразователя формирует значение команды управления током зарядки на основе величины подавления рекуперативного крутящего момента или величины подавления рекуперативной мощности.
13. Устройство управления ходом электромоторного вагона по п.10, в котором модуль управления преобразователя формирует величину подавления рекуперативной мощности на основе произведения величины подавления рекуперативного крутящего момента и величины, эквивалентной числу оборотов электромотора или скорости электромоторного вагона, и формирует значение команды управления током зарядки на основе величины подавления рекуперативной мощности.
14. Устройство управления ходом электромоторного вагона по п.10, в котором модуль управления преобразователя формирует значение команды управления током зарядки на основе значения, полученного посредством усиления сигнала режима рекуперации.
| АВТОНОМНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С РАЦИОНАЛЬНЫМ ИСПОЛЬЗОВАНИЕМ ЭЛЕКТРОЭНЕРГИИ, ВЫРАБАТЫВАЕМОЙ В ПРОЦЕССЕ РЕКУПЕРАТИВНОГО ТОРМОЖЕНИЯ | 2001 |
|
RU2198103C2 |
| JP 3795803 B2, 12.07.2006 | |||
| DE 19731642 C1, 18.02.1999 | |||
| Способ обработки растений и устройство для его осуществления | 1989 |
|
SU1724147A1 |
| УГОЛКОВОЕ ВОЛНОВОДНОЕ СОЧЛЕНЕНИЕ | 1991 |
|
RU2018995C1 |

