Приоритет испрашивается по японской заявке №2010-209285, поданной 17 сентября 2010 года, которая включена в настоящее описание посредством ссылки.
Уровень техники
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству обработки носителей, имеющему модуль записи, который записывает на носитель записи, к способу управления для устройства обработки носителей, и к носителю записи, который хранит программу, исполняемую модулем управления, чтобы управлять устройством обработки носителей.
Предшествующий уровень техники
Когда запись не может продолжаться по какой-либо причине, к примеру, закончившейся бумаги в устройстве записи, которое записывает на носитель записи, устройство записи обычно сообщает об ошибке и останавливает печать.
Гибридные устройства, которые комбинируют другие функции с функциональностью принтера, являются теперь обычными. См., например, не прошедшую экспертизу публикацию патентной японской заявки JP-A-H03-225593. Устройство, рассматриваемое в JP-A-H03-225593, имеет функцию для записи журнала в дополнение к функционированию в качестве устройства записи для печати квитанций. Устройство, рассматриваемое в JP-A-H03-225593, также может продолжать печать только квитанций, когда отсутствует бумага для записи журнала.
Устройство, рассматриваемое в JP-A-H03-225593, таким образом, может одновременно печатать квитанции и журнал. Однако, поскольку квитанции и журнал обычно записывают одну и ту же информацию, довольно трудно продолжать печать квитанций после того, как подача бумаги для журнала заканчивается, а затем печатать журнал позднее.
Однако, гибридные устройства, которые имеют функции, отличные от функций записи, включают в себя устройства, которые записывают несвязанную информацию на различных носителях записи, и устройства с функциями, отличными от записи на носители записи, и когда запись на носителе записи запрещается в таких устройствах, отсутствует способ предотвращать остановку работы всей системы.
Сущность изобретения
Изобретение предоставляет возможность недопущения прерывания всех функций устройства, когда запись становится запрещенной в устройстве, имеющем многочисленные функции, включающие в себя запись на носитель записи.
Первый аспект изобретения заключается в устройстве обработки носителей, включающем в себя: множество модулей работы, которые, соответственно, обрабатывают множество носителей записи; и модуль управления, который исполняет команды, принимаемые из хост-компьютера, и управляет модулями работы, и когда модуль управления обнаруживает в нормальном рабочем режиме, что команды для любого из модулей работы не могут быть исполнены, переходит в ограниченный режим работы, в котором команды для этого модуля работы не могут быть исполнены, а команды из хост-компьютера могут быть приняты, и команды для других модулей работы могут быть исполнены.
В этом аспекте изобретения, когда проблема возникает в любом из многочисленных модулей работы, которые обрабатывают носитель записи, и модуль работы не может исполнять рабочие команды, модуль управления запрещает исполнение команд для этого модуля работы в то же время продолжая принимать команды из хост-компьютера и исполняя команды для других модулей работы. Как результат, модуль управления может принимать другие команды и может продолжать работать другими модулями работы согласно принятым командам. Как результат, можно не допускать остановки исполнения всех функций устройства в устройстве обработки носителей, которое может исполнять многочисленные операции, когда существует проблема с одной операцией.
В устройстве обработки носителей согласно другому аспекту изобретения, когда команда для модуля работы, который не может исполнять команды, принимается из хост-компьютера после входа в ограниченный режим работы, модуль управления входит в режим остановленной работы, в котором прием дополнительных команд и исполнение команд для других модулей работы также запрещается.
В этом аспекте изобретения, устройство обработки носителей, которое может выполнять многочисленные операции, может не допускать остановки исполнения всех функций устройства, когда существует проблема с одной операцией. Продолжение приема команд, которые не могут быть исполнены, и потери команд, которые не могут быть исполнены, также можно избежать посредством входа в режим остановленной работы, который запрещает прием команд и работу другими модулями работы, когда принимается команда для модуля работы, который не может исполнять команды. Как результат, хост-компьютер может более надежно управлять устройством обработки носителей.
В устройстве обработки носителей согласно другому аспекту изобретения, модуль управления может принимать и исполнять команды управления в реальном времени, отправляемые из хост-компьютера, и может отправлять рабочее состояние в хост-компьютер, даже в режиме остановленной работы.
Этот аспект изобретения предоставляет возможность модулю управления надежно сообщать режим остановленной работы в хост-компьютер и предоставляет возможность надежного управления посредством хост-компьютера, поскольку модуль управления может принимать и исполнять команды управления в реальном времени, которые отправляются из хост-компьютера, и возвращать текущее рабочее состояние в хост-компьютер даже в режиме остановленной работы. Помимо этого, модулю управления может быть выдана команда посредством хост-компьютера удалять уже принятые команды и он может быть выполнен с возможностью восстанавливаться из режима остановленной работы.
Устройство обработки носителей согласно другому аспекту изобретения также имеет рабочий модуль; и модуль управления отменяет ограниченный режим работы и возвращается в нормальный рабочий режим, когда причина для входа в ограниченный режим работы разрешается посредством конкретного ввода из рабочего модуля или посредством исполнения конкретной команды, принимаемой из хост-компьютера.
В этом аспекте изобретения, модуль управления может легко возвращаться из режима остановленной работы или ограниченного режима работы в нормальное рабочее состояние (нормальный рабочий режим) в результате пользовательского действия или команды, отправляемой из хост-компьютера.
В устройстве обработки носителей согласно другому аспекту изобретения, модуль управления отправляет сигнал в хост-компьютер, указывающий, что команды для модуля работы, который не может исполнять команды, не могут быть исполнены при входе в ограниченный режим работы.
В этом аспекте изобретения, модуль управления отправляет сигнал, сообщающий хост-компьютеру то, что команды не могут быть исполнены, и хост-компьютер может знать, что устройство обработки носителей вошло в ограниченный режим работы. Как результат, хост-компьютер останавливает отправку рабочих команд в устройство обработки носителей, переходит к операции для отмены ограниченного режима работы и может эффективно и надежно управлять устройством обработки носителей.
В устройстве обработки носителей согласно другому аспекту изобретения, множество носителей записи включает в себя рулонную бумагу и бланки; множество модулей работы включает в себя рабочий модуль рулонной бумаги, который обрабатывает рулонную бумагу, и рабочий модуль бланков, который обрабатывает бланки; и каждый из рабочего модуля рулонной бумаги и рабочего модуля бланков имеет модуль записи для записи на носитель записи.
В устройстве обработки носителей, которое использует рулонную бумагу и бланки в качестве носителя записи согласно этому аспекту изобретения, когда проблема возникает в модуле работы рулонной бумаги или модуле работы бланков, и модуль работы не может исполнять рабочие команды, модуль управления запрещает исполнение команд для этого модуля работы в то же время продолжая принимать команды из хост-компьютера и исполнять команды для других модулей работы. Как результат, модуль управления может принимать другие команды и может продолжать работать другими модулями работы согласно принятым командам. Как результат, можно не допускать остановки исполнения всех функций устройства в устройстве обработки носителей, которое может исполнять многочисленные операции, когда существует проблема с одной операцией.
Другой аспект изобретения заключается в способе управления устройством обработки носителей, который управляет устройством обработки носителей, имеющим множество модулей работы для обработки множества носителей записи, включающем в себя этапы:
исполнения команд, принимаемых из хост-компьютера, и управления соответствующими модулями работы; и разрешения ограниченного режима работы, в котором команды для этого модуля работы не могут быть исполнены, а команды из хост-компьютера могут быть приняты, и команды для других модулей работы могут быть исполнены, когда в нормальном рабочем режиме обнаруживается то, что команды для любого из модулей работы не могут быть исполнены.
Посредством исполнения способа управления согласно этому аспекту изобретения, поскольку устройство обработки носителей, имеющее множество модулей работы для обработки различных носителей записи, может запрещать исполнение команд для этого модуля работы, в то же время продолжая принимать команды из хост-компьютера и исполнять команды для других модулей работы, когда проблема возникает в одном модуле работы, и рабочий модуль не может исполнять рабочие команды, другие команды могут быть приняты, и управление другими модулями работы согласно принятым командам может продолжаться. Как результат, можно не допускать остановки исполнения всех функций устройства в устройстве обработки носителей, которое может исполнять многочисленные операции, когда существует проблема с одной операцией.
Другой аспект изобретения заключается в программе, которая может быть исполнена модулем управления, который управляет устройством обработки носителей, имеющим множество модулей работы для обработки множества носителей записи, причем программа побуждает модуль управления исполнять этапы, включающие в себя: исполнение команд, принимаемых из хост-компьютера, и управление соответствующими модулями работы; и разрешение ограниченного режима работы, в котором команды для этого модуля работы не могут быть исполнены, а команды из хост-компьютера могут быть приняты, и команды для других модулей работы могут быть исполнены, когда в нормальном режиме работы обнаруживается то, что команды для любого из модулей работы не могут быть исполнены.
Посредством исполнения программы согласно этому аспекту изобретения модуль управления запрещает исполнение команд для этого модуля работы, в то же время продолжая принимать команды из хост-компьютера и исполнять команды для других модулей работы, когда проблема возникает в любом из многочисленных модулей работы, которые обрабатывают носитель записи, и рабочий модуль не может исполнять рабочие команды. Как результат, модуль управления может принимать другие команды и может продолжать работать другими модулями работы согласно принятым командам. Как результат, можно не допускать остановки исполнения всех функций устройства в устройстве обработки носителей, которое может исполнять многочисленные операции, когда существует проблема с одной операцией.
Эффект от изобретения
Изобретение позволяет избегать прерывания всех функций устройства, когда проблема возникает с одной операцией в устройстве обработки носителей, которое может исполнять многочисленные операции.
Другие цели и достижения наряду с более полным пониманием изобретения станут очевидными и будут приняты во внимание посредством обращения к нижеприведенному описанию и формуле изобретения, рассматриваемыми в сочетании с прилагаемыми чертежами.
Краткое описание чертежей
Фиг.1 является внешним перспективным представлением гибридного устройства обработки согласно предпочтительному варианту осуществления изобретения.
Фиг.2 является схематичным видом сбоку главного модуля гибридного устройства обработки.
Фиг.3 показывает различные части, расположенные в тракте транспортировки носителей.
Фиг.4 является блок-схемой функциональной конфигурации гибридного устройства обработки.
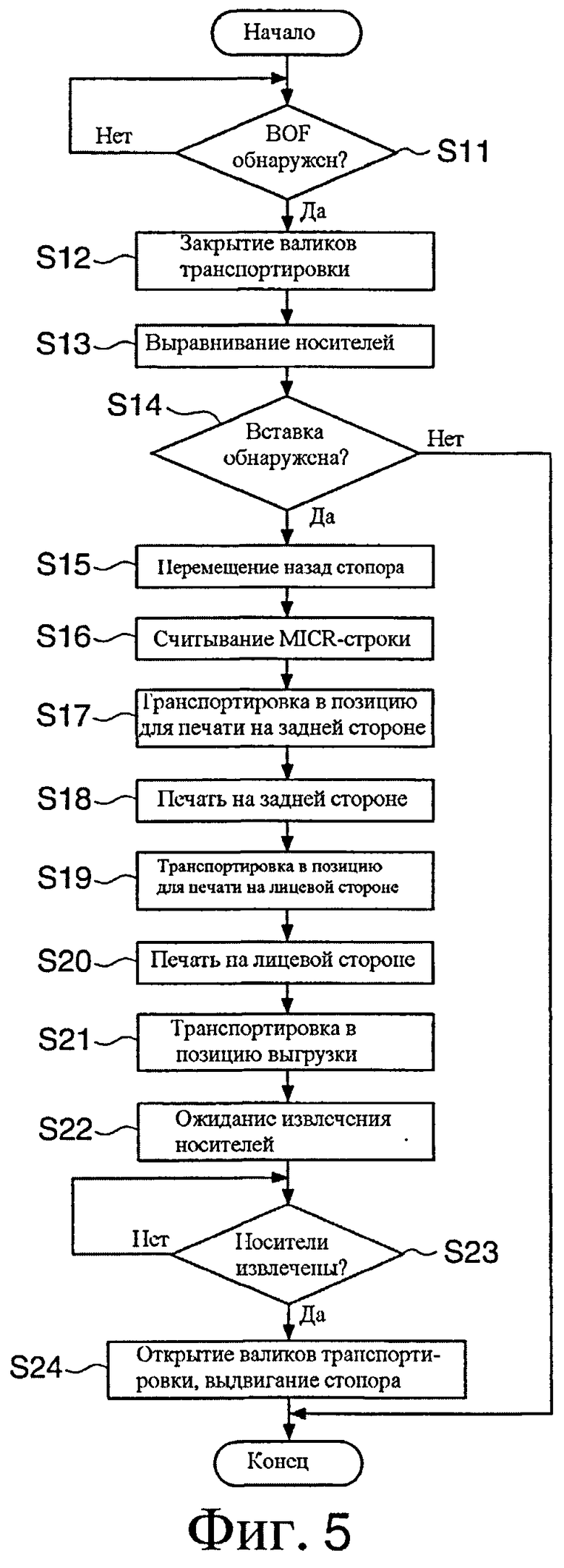
Фиг.5 является блок-схемой последовательности операций, показывающей нормальную работу обработки чеков.
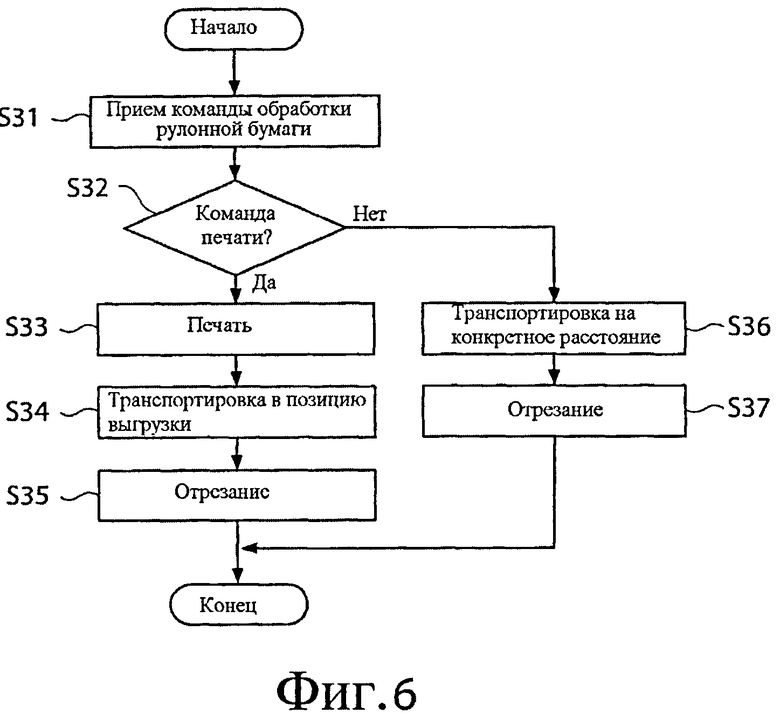
Фиг.6 является блок-схемой последовательности операций, показывающей нормальную работу печати на рулонной бумаге.
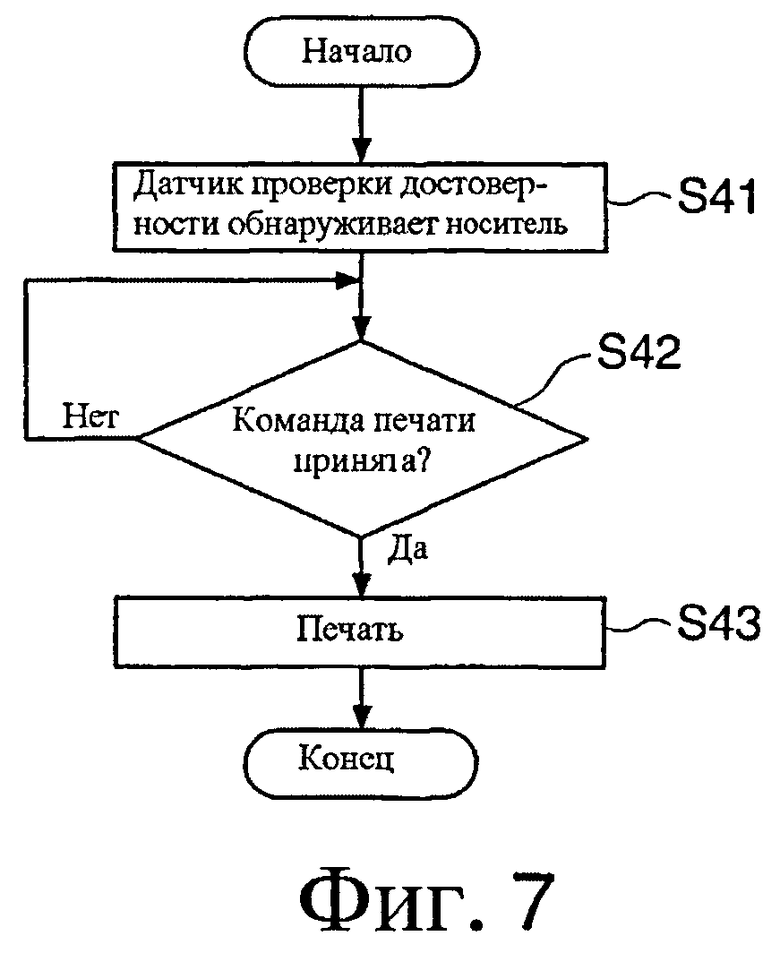
Фиг.7 является блок-схемой последовательности операций способа, показывающей нормальную работу для печати с проверкой достоверности.
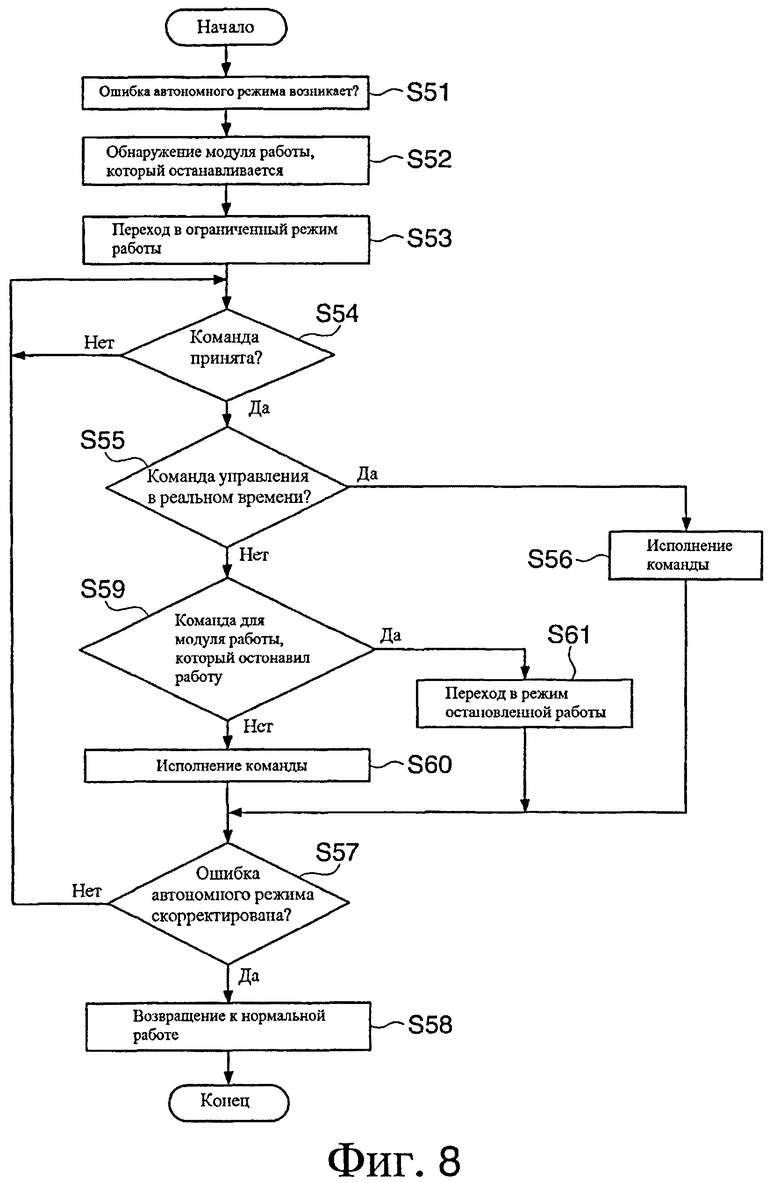
Фиг.8 является блок-схемой последовательности операций способа, показывающей работу, когда возникает событие, побуждающее устройство переходить в автономный режим.
Подробное описание вариантов осуществления
Предпочтительный вариант осуществления настоящего изобретения описывается ниже со ссылкой на прилагаемые чертежи.
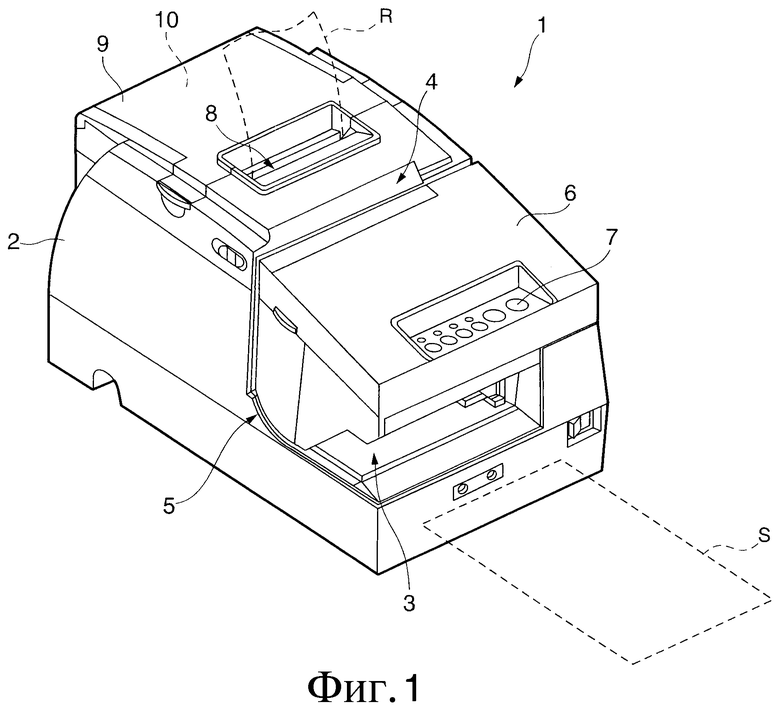
Фиг.1 является внешним перспективным представлением гибридного устройства обработки в качестве примера устройства обработки носителей согласно предпочтительному варианту осуществления изобретения. Это гибридное устройство 1 обработки (устройство обработки носителей) считывает строку MICR (распознавание символов, отпечатанных магнитными чернилами) символов, отпечатанных магнитными чернилами, записываемых на чеке (бланк или носитель записи) S, и выполняет процесс печати (записи) на чеке S согласно считанному содержимому. Гибридное устройство 1 обработки также хранит рулонную бумагу (носитель записи) R из термографической бумаги, намотанной в ролике внутри, и выполняет процесс печати (записи) на этой рулонной бумаге.
Как показано на фиг.1, гибридное устройство 1 обработки имеет в основном прямоугольный коробчатый корпус 2. Вход 3 носителей для вставки чека S располагается с конкретной шириной поперек устройства в передней левой стороне корпуса 2. Выход 4 носителей, из которого выгружается обрабатываемый чек S, располагается с конкретной шириной поперек устройства в верхней части корпуса 2 в середине продольного направления, т.е. между передней и задней стороной устройства. Тракт 5 транспортировки носителей, который идет из входа 3 носителей с изгибом назад и вверх, формируется между входом 3 носителей и выходом 4 носителей. Вход 3 носителей, выход 4 носителей и тракт 5 транспортировки носителей формируются открытыми к левой стороне корпуса 2, обеспечивая транспортировку чека S, который шире входа 3 носителей, выхода 4 носителей и тракта 5 транспортировки носителей.
Передняя крышка 6 покрывает верхнюю часть корпуса 2 перед выходом 4 носителей, и рабочая панель 7 (рабочий модуль), используемая для того, чтобы управлять гибридным устройством 1 обработки, располагается в переднем конце передней крышки 6. Выход 8 рулонной бумаги, из которого рулонная бумага R выгружается после печати, располагается с конкретной шириной поперек устройства в верхней части корпуса 2 за выходом 4 носителей. Крышка 9 доступа также располагается на верхней части корпуса 2 за выходом 8 рулонной бумаги, и эта крышка 9 доступа присоединяется поворотно в ее заднем конце к корпусу 2. Когда крышка 9 доступа открывается, отсек 10 рулонной бумаги, который хранит рулонную бумагу R, делается видимым, и рулонная бумага R может заменяться. Рулонная бумага R имеет рулон термографической бумаги, намотанной на сердечник в ролик.
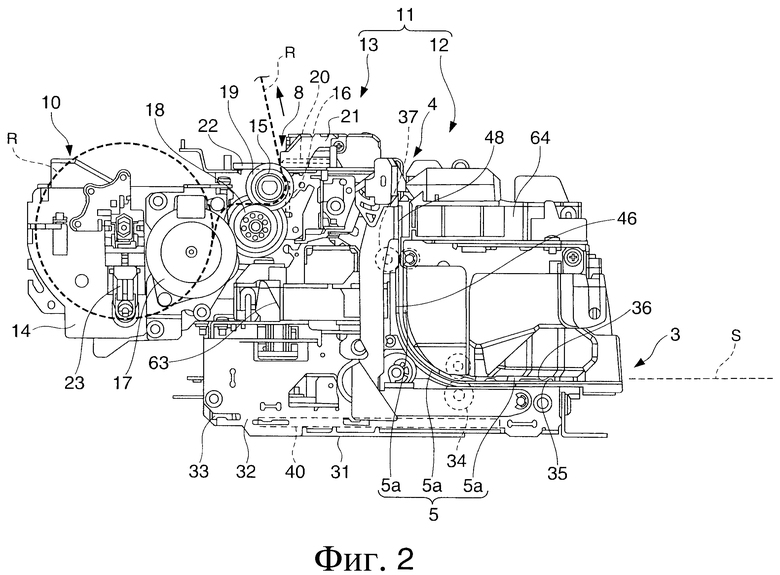
Фиг.2 является видом сбоку, показывающим главный модуль гибридного устройства 1 обработки. Фиг.2 показывает гибридное устройство 1 обработки, когда корпус 2, передняя крышка 6, крышка 9 доступа и другие внешние части сняты. Как показано на фиг.2, гибридное устройство 1 обработки имеет главный модуль 11, и главный модуль 11 включает в себя модуль 12 печати на бланках для печати на чеке S и других бланках и модуль 13 печати на рулонной бумаге для печати на рулонной бумаге R, исполняемые в согласии.
Модуль 13 печати на рулонной бумаге включает в себя левую боковую раму 14 и парную правую боковую раму (не показана) и держатель рулонной бумаги (не показан на чертеже), расположенный между боковыми рамами и формирующий нижнюю, переднюю и заднюю стороны отсека 10 рулонной бумаги. Этот держатель рулонной бумаги удерживает рулонную бумагу R так, что рулонная бумага может свободно вращаться, и гарантирует, что рулонная бумага R может свободно сворачиваться в рулон внутри отсека 10 рулонной бумаги.
Валик 15 располагается свободно с возможностью вращения между левой и правой боковыми рамами около выхода 8 рулонной бумаги.
Термопечатающая головка 16 располагается перед валиком 15 в позиции напротив валика 15, и термопечатающая головка 16 имеет множество нагревающих резисторов на ее лицевой поверхности, располагающейся напротив валика 15. Передний конец рулонной бумаги R, хранимой в отсеке 10 рулонной бумаги, удерживается между валиком 15 и термопечатающей головкой 16 и транспортируется к выходу 8 рулонной бумаги посредством вращения валика 15. Когда рулонная бумага R проходит между валиком 15 и термопечатающей головкой 16, содержимое, к примеру, текст и изображения, записывается на рулонной бумаге R посредством тепла, испускаемого из термопечатающей головки 16. Мотор 17 транспортировки рулонной бумаги располагается на левой боковой раме 14. Вращение мотора 17 транспортировки рулонной бумаги передается через промежуточную шестерню 18 на ведущую шестерню 19, расположенную коаксиально к валику 15, и валик 15 поворачивается.
Модуль 21 автоматического резака бумаги с внутренним подвижным ножом 20 и мотором 24 возбуждения резака (см. фиг.4) для управления подвижным ножом 20 располагается выше валика 15. Стационарный нож 22 располагается за модулем 21 автоматического резака бумаги с выходом 8 рулонной бумаги между ними. Передняя концевая часть рулонной бумаги R проходит между подвижным ножом 20 и стационарным ножом 22 к выходу 8 рулонной бумаги, и когда рулонная бумага R отрезается, мотор 24 возбуждения резака побуждает нож 20 перемещаться обратно в направлении к стационарному ножу 22 и вместе со стационарным ножом 22 отрезает рулонную бумагу R.
Датчик 23 оставшейся рулонной бумаги, который обнаруживает, сколько рулонной бумаги R остается в отсеке 10 рулонной бумаги, также располагается на левой боковой раме 14.
Как показано на фиг.2, модуль 12 печати на бланках имеет основную раму 33, включающую в себя несущую раму 31, а также левую боковую раму 32 и правую боковую раму (не показана на чертеже), которые берут начало от несущей рамы 31. Пара верхних и нижних направляющих элементов для бумаги, формирующих нижнюю направляющую поверхность 35 и верхнюю направляющую поверхность 36, располагается на основной раме 33, и зазор между нижней направляющей поверхностью 35 и верхней направляющей поверхностью 36 формируется в качестве тракта 5 транспортировки носителей. Этот тракт 5 транспортировки носителей включает в себя горизонтальную часть 5а тракта транспортировки, которая идет из входа 3 носителей горизонтально к задней стороне устройства, изогнутую часть 5b тракта транспортировки, которая изгибается вверх от заднего конца горизонтальной части 5а тракта транспортировки, и вертикальную часть 5 с тракта транспортировки, которая идет вверх от верхнего конца изогнутой части 5b тракта транспортировки и сообщается с выходом 4 носителей.
Пара первых транспортировочных валиков 34 располагается напротив друг друга на нижней направляющей поверхности 35 и верхней направляющей поверхности 36 на стыке между горизонтальной частью 5а тракта транспортировки и изогнутой частью 5b тракта транспортировки. Пара вторых транспортировочных валиков 37 располагается напротив друг друга на нижней направляющей поверхности 35 и верхней направляющей поверхности 36 вертикальной части 5 с тракта транспортировки. Первые транспортировочные валики 34 и вторые транспортировочные валики 37 вращаются при возбуждении мотором 38 транспортировки бланков (фиг.4) и транспортируют чек S.
Первые транспортировочные валики 34 и вторые транспортировочные валики 37 сконфигурированы так, что один валик каждой пары валиков может перемещаться в направлении к и от другого валика и открывать и закрывать тракт 5 транспортировки носителей, когда пары валиков возбуждаются вместе или обособленно мотором 39 открытия валика (фиг.4), соединенным с одним валиком каждой пары.
Плата 40 схемы управления, которая управляет всей работой гибридного устройства 1 обработки на основе программы управления, также располагается на несущей раме 31.
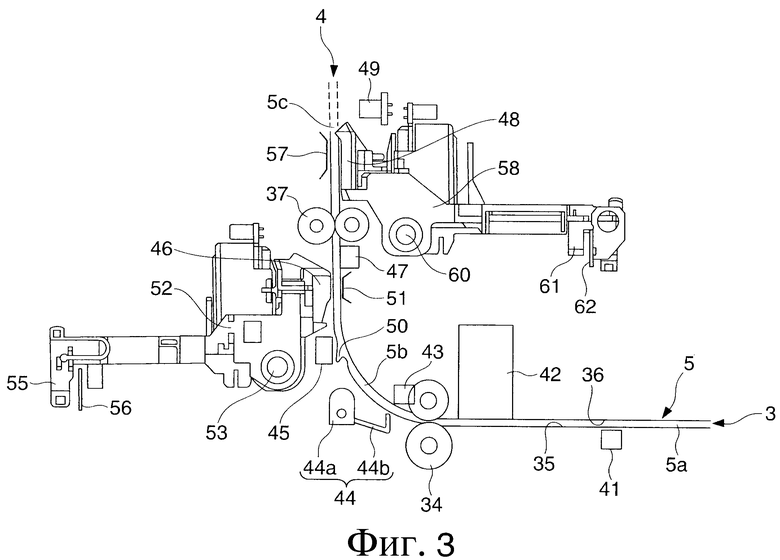
Фиг.3 показывает выбранные компоненты, расположенные вдоль тракта 5 транспортировки носителей.
В тракте 5 транспортировки носителей в последовательности от стороны входа 3 носителей располагаются датчик 41 BOF (нижней части формы), MICR-головка 42, первые транспортировочные валики 34, датчик 43 TOF (верхней части формы), средство 44 выравнивания, датчик 45 проверки достоверности, первая печатающая головка (головка записи) 46, датчик 47 МОР (середина прохода бумаги), вторые транспортировочные валики 37, вторая печатающая головка (другая головка записи) 48 и датчик 49 EJD (детектор выталкивания бланка).
BOF-датчик 41, TOF-датчик 43, датчик 45 проверки достоверности, МОР-датчик 47 и EJD-датчик 49 являются, например, пропускающими или отражающими фотодатчиками и бесконтактно обнаруживают присутствие чека S в его соответствующих позициях в тракте 5 транспортировки носителей.
BOF-датчик 41 обнаруживает задний конец чека S, вставленного из входа 3 носителей, и располагается на нижней направляющей поверхности 35 рядом с входом 3 носителей.
TOF-датчик 43 обнаруживает передний конец чека S, вставленного из входа 3 носителей, и располагается на верхней направляющей поверхности 36 на стороне ближе к выходу бумаги, чем первые транспортировочные валики 34.
EJD-датчик 49 обнаруживает выгрузку чека S, обрабатываемого модулем 12 печати на бланках, из выхода 4 носителей и располагается около выхода 4 носителей.
МОР-датчик 47 обнаруживает присутствие чека S, транспортируемого через тракт 5 транспортировки носителей, и располагается на верхней направляющей поверхности 36 на стороне ближе к входу бумаги, чем вторые транспортировочные валики 37.
Модуль 12 печати на бланках в этом варианте осуществления изобретения может выполнять процесс печати проверки достоверности, который печатает на чеке S, вставленном из выхода 4 носителей, посредством первой печатающей головки 46 и второй печатающей головки 48, и затем выгружает чек S после печати из выхода 4 носителей. Как результат, паз 50, который выравнивает чек S в результате входа переднего конца чека S, вставленного из выхода 4 носителей, в паз 50, формируется в верхнем конце изогнутой части 5b тракта транспортировки из тракта 5 транспортировки носителей. Датчик 45 проверки достоверности обнаруживает вхождение дистального конца чека S в паз 50 и располагается на позиции, противоположной пазу 50.
MICR-головка 42 считывает символы, отпечатанные магнитными чернилами, записанные на поверхности чека S, и располагается на верхней направляющей поверхности 36 в горизонтальной части 5а тракта транспортировки из тракта 5 транспортировки носителей. Наличие чека S определяется на основе данных, считываемых посредством MICR-головки 42.
Средство 44 выравнивания приостанавливает чек S, вставленный из входа 3 носителей, и располагается на стороне выхода 4 носителей TOF-датчика 43. Средство выравнивания включает в себя модуль 44а возбуждения стопора, такой как, например, соленоид, и стопор 44b, который заходит и выходит из тракта 5 транспортировки носителей согласно тому, как модуль 44а возбуждения стопора управляется, и чек S выравнивается посредством остановки переднего конца чека S в стопоре 44b.
Первая печатающая головка 46 предназначена для печати необходимой подтверждающей информации, требуемой в предпринимательской деятельности, к примеру, идентификационного номера покупателя, даты и суммы по чеку, на задней стороне чека S, транспортируемого через тракт 5 транспортировки носителей, и является печатающей головкой с последовательной ударной точечной матрицей (SIDM), которая печатает посредством ударения красящей ленты с помощью стержней записи, чтобы переносить чернила с красящей ленты на носитель записи. Эта первая печатающая головка 46 находится в нижнем конце вертикальной части 5 с тракта транспортировки из тракта 5 транспортировки носителей. Первая пластина 51 располагается по ширине на основной раме 33 (фиг.2) в позиции напротив первой печатающей головки 46, причем вертикальная часть 5 с тракта транспортировки находится между ними. Первая печатающая головка 46 устанавливается на первой каретке 52, расположенной на стороне вертикальной части 5с тракта транспортировки, в направлении задней стороны устройства. Эта первая каретка 52 может свободно скользить вдоль вала 53 первой каретки, расположенного горизонтально между боковыми рамами основной рамы 33 (фиг.2), и перемещается двунаправленно вдоль вала 53 первой каретки при возбуждении мотором 54 первой каретки (средство возбуждения, см. фиг.4). Первая каретка 52 соединяется с мотором 54 первой каретки посредством промежуточного зубчатого ремня (не показан на чертеже). Этот мотор 54 первой каретки является шаговым мотором и может перемещать первую каретку 52 на расстояние, эквивалентное желаемому числу шагов согласно управлению платой 40 схемы управления.
Датчик 55 первой каретки (средство обнаружения), который обнаруживает позицию первой каретки 52, располагается в нижней части первой каретки 52. Этот датчик 55 первой каретки является пропускающим фотодатчиком и сканирует первую шкалу 56, расположенную по существу параллельно валу 53 первой каретки, вместе с двунаправленным перемещением первой каретки 52.
Множественные прорези заданной ширины формируются в этой первой шкале 56, и смещение первой каретки 52 обнаруживается, и позиция первой каретки 52 (первой печатающей головки 46) обнаруживается захватом оптических сигналов, проходящих через эти прорези, по мере того как датчик 55 первой каретки сканирует первую шкалу 56. В этом варианте осуществления изобретения, питание подается в датчик 55 первой каретки только в ходе возбуждения мотора 54 первой каретки, и поскольку подача питания в датчик 55 первой каретки прекращается, когда мотор 54 первой каретки останавливается, потребляемая мощность уменьшается во время ожидания, и пониженное потребление мощности может достигаться.
Вторая печатающая головка 48 печатает получателя платежа, дату, сумму по чеку и другую важную информацию на лицевой стороне чека S, транспортируемого через тракт 5 транспортировки носителей, и представлена печатающей головкой SIDM идентично первой печатающей головке 46. Эта вторая печатающая головка 48 находится над первой печатающей головкой 46 и располагается на стороне вертикальной части 5 с тракта транспортировки к передней стороне устройства. Вторая пластина 57 располагается по ширине на основной раме 33 (фиг.2) в позиции напротив второй печатающей головки 48 с вертикальной частью 5 с тракта транспортировки между ними.
Аналогично первой печатающей головке 46, вторая печатающая головка 48 размещается на второй каретке (другой каретке) 58, и эта вторая каретка 58 перемещается двунаправленно вдоль вала 60 второй каретки (вала другой каретки), возбуждаемого посредством мотора 59 второй каретки (другого средства возбуждения, см. фиг.4).
Датчик 61 второй каретки (другое средство обнаружения) располагается в нижней части второй каретки 58, и этот датчик 61 второй каретки сканирует вторую шкалу (другую шкалу) 62, расположенную по существу параллельно валу 60 второй каретки, вместе с двунаправленным перемещением второй каретки 58.
Следует отметить, что мотор 59 второй каретки также представляется шаговым мотором аналогично мотору 54 первой каретки.
Первая кассета 63 красящей ленты (фиг.2) и вторая кассета 64 красящей ленты (фиг.2), которые хранят красящие ленты, которые транспортируются, соответственно, между первой печатающей головкой 46 и первой пластиной 51 и второй печатающей головкой 48 и второй пластиной 57, съемно монтируются на основной раме 33.
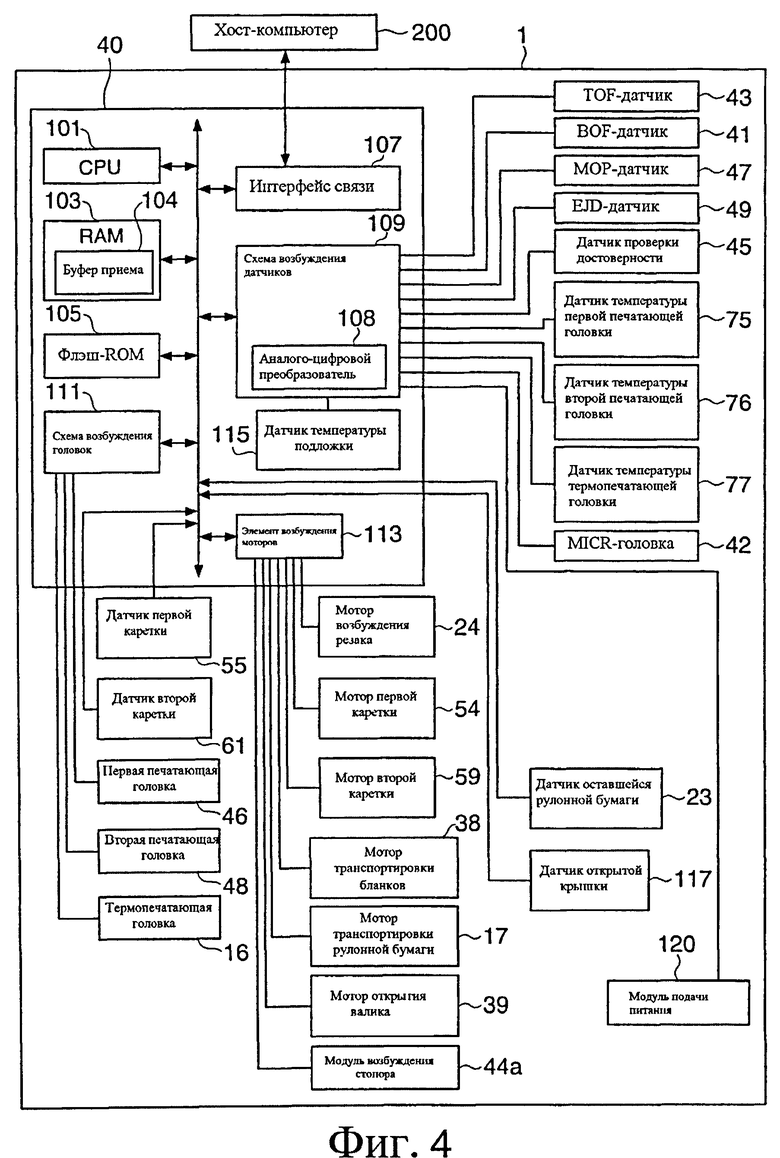
Фиг.4 является блок-схемой, показывающей функциональную конфигурацию гибридного устройства 1 обработки.
Как показано на фиг.4, система управления гибридным устройством 1 обработки включает в себя различные модули возбуждения, к примеру, моторы, и различные датчики, соединенные с модулем управления, установленным на плате 40 схемы управления.
Плата 40 схемы управления включает в себя CPU 101 (модуль управления), который исполняет программу управления и управляет другими частями; RAM 103, которое временно хранит обработанные данные и программы, исполняемые посредством CPU 101; флэш-ROM 105, которое хранит настройки и базовую программу управления, исполняемую посредством CPU 101; и интерфейс 107 связи, который обменивается командами и данными с хост-компьютером 200 в качестве внешнего устройства, соединенного с гибридным устройством 1 обработки.
Плата 40 схемы управления также имеет схему 109 возбуждения датчиков с внутренним аналого-цифровым преобразователем 108 и преобразует вывод из датчиков гибридного устройства 1 обработки в цифровые данные и выводит в CPU 101; схему 111 возбуждения головок, которая возбуждает печатающие головки гибридного устройства 1 обработки; и элемент 113 возбуждения моторов, который возбуждает моторы гибридного устройства 1 обработки. Различные части платы 40 схемы управления соединяются друг с другом с возможностью обмена данными. Дополнительно, следует отметить, что то, как различные функциональные компоненты платы 40 схемы управления конкретно исполняются, может быть определено требуемым образом, включая и исполнение отдельных модулей в качестве дискретных полупроводниковых устройств, и исполнение функций многочисленных функциональных частей с использованием конструкции в форме системы на одном кристалле (SOC).
Датчик 115 температуры подложки, который обнаруживает температуру элемента 113 возбуждения моторов, устанавливается на плате 40 схемы управления. Датчик 115 температуры подложки является терморезистором, расположенным на задней стороне платы 40 схемы управления, где устанавливается элемент 113 возбуждения моторов, или около элемента 113 возбуждения моторов.
Датчик 23 оставшейся рулонной бумаги, который обнаруживает, если количество рулонной бумаги R, хранимой в отсеке 10 рулонной бумаги (фиг.1), превышает конкретное количество, датчик 117 открытой крышки, который обнаруживает, если крышка 9 доступа открыта, и датчик 55 первой каретки и датчик 61 второй каретки, описанные выше по тексту, соединяются с CPU 101.
Датчик 23 оставшейся рулонной бумаги является типом переключающегося датчика, который активируется, когда наружный диаметр рулонной бумаги R превышает или равен установленному размеру, датчик 117 открытой крышки является переключающимся типом датчика, который активируется, когда крышка 9 доступа открывается, и оба датчика выводят ВЫСОКО/НИЗКО согласно состоянию включено/выключено. Датчик 55 первой каретки и датчик 61 второй каретки исполняются, например, как фотопрерыватели и переключают вывод ВЫСОКО/НИЗКО согласно тому, превышает или нет количество света, обнаруживаемое модулем приема света, внутренне сохраненное пороговое значение.
Когда рабочая панель 7 работает, сигнал работы вводится из рабочей панели 7 в CPU 101, предоставляя возможность обнаружения работы, выполняемой на рабочей панели 7, по сигналу работы.
CPU 101 управляет частями, установленными на плате 40 схемы управления, посредством считывания и исполнения базовой программы управления, сохраненной во флэш-ROM 105. На основе значений датчика, вводимых через схему 109 возбуждения датчиков, и выходных значений датчика 23 оставшейся рулонной бумаги, датчика 117 открытой крышки, датчика 55 первой каретки и датчика 61 второй каретки, CPU 101 выполняет операции, включающие в себя контроль рабочего состояния гибридного устройства 1 обработки, возбуждение головок посредством схемы 111 возбуждения головок, управление моторами посредством элемента 113 возбуждения моторов, печать на лицевой и задней стороне чека S, считывание MICR-строки и печать на рулонной бумаге R.
RAM 103 используется в качестве оперативной памяти для временного хранения программ и данных, используемых для работы CPU 101. Буфер 104 приема, который временно хранит команды и данные, принятые из хост-компьютера 200 через интерфейс 107 связи, предоставляется в RAM 103. CPU 101 считывает и исполняет команды, сохраненные в буфере 104 приема, в принятом порядке.
Схема 109 возбуждения датчиков соединяется с BOF-датчиком 41, TOF-датчиком 43, датчиком 45 проверки достоверности, МОР-датчиком 47, EJD-датчиком 49 и датчиком 115 температуры подложки, преобразует выходные значения датчика в цифровые данные и выводит цифровые данные в CPU 101. Схема 109 возбуждения датчиков также соединяется с MICR-головкой 42 и выводит выходные значения MICR-головки 42 в качестве цифровых данных в CPU 101 при считывании символов, отпечатанных магнитными чернилами, на чеке S, посредством MICR-головки 42.
Датчик 75 температуры первой печатающей головки, датчик 76 температуры второй печатающей головки и датчик 77 температуры термопечатающей головки также соединяются со схемой 109 возбуждения датчиков. Датчик 75 температуры первой печатающей головки располагается на первой печатающей головке 46, а датчик 76 температуры второй печатающей головки располагается на второй печатающей головке 48. Датчик 75 температуры первой печатающей головки и датчик 76 температуры второй печатающей головки располагаются около соленоида, который возбуждает стержни записи, и обнаруживают его температуру и около соответствующего соленоида. Датчик 77 температуры термопечатающей головки располагается около нагревательных элементов термопечатающей головки 16 и обнаруживает температуру нагревательных элементов. Датчик 75 температуры первой печатающей головки, датчик 76 температуры второй печатающей головки и датчик 77 температуры термопечатающей головки исполнены посредством терморезисторов, и схема 109 возбуждения датчиков выводит выходные значения датчика 75 температуры первой печатающей головки, датчика 76 температуры второй печатающей головки и датчика 77 температуры термопечатающей головки в качестве цифровых данных в CPU 101. На основе температур, определенных из выходных значений датчика 75 температуры первой печатающей головки, датчика 76 температуры второй печатающей головки и датчика 77 температуры термопечатающей головки, CPU 101 управляет термопечатающей головкой 16, первой печатающей головкой 46 и второй печатающей головкой 48. Более конкретно, CPU 101 безусловно приостанавливает работу соответствующих головок, когда температура термопечатающей головки 16, первой печатающей головки 46 или второй печатающей головки 48 превышает заранее установленное пороговое значение. В этом случае CPU 101 возобновляет работу, когда температура приостановленной головки падает ниже установленной температуры.
Схема 111 возбуждения головок записывает на чек S посредством включения питания соленойдных обмоток первой печатающей головки 46 и второй печатающей головки 48, чтобы заставлять стержни записи ударять красящую ленту согласно управлению посредством CPU 101. Схема 111 возбуждения головок также включает питание нагревательных элементов (не показаны на чертеже) термопечатающей головки 16 согласно управлению посредством CPU 101, чтобы прикладывать тепло к и записывать на поверхности записи рулонной бумаги R.
Элемент 113 возбуждения моторов выводит питание возбуждения и импульсы возбуждения согласно управлению посредством CPU 101 в мотор 17 транспортировки рулонной бумаги, мотор 24 возбуждения резака, мотор 38 транспортировки бланков, мотор 39 открытия валика, модуль 44а возбуждения стопора, мотор 54 первой каретки и мотор 59 второй каретки, которые являются шаговыми моторами. Питание возбуждения, подаваемое в моторы элементом 113 возбуждения моторов, является питанием 24-VDC, подаваемым из модуля 120 подачи питания в различные части. Модуль 120 подачи питания подает питание DC в модули возбуждения гибридного устройства 1 обработки, показанные на фиг.4, т.е. в печатающие головки (первую печатающую головку 46, вторую печатающую головку 48 и термопечатающую головку 16), моторы (мотор 24 возбуждения резака, мотор 54 первой каретки, мотор 59 второй каретки, мотор 38 транспортировки бланков, мотор 17 транспортировки рулонной бумаги и мотор 39 открытия валика), в модуль 44а возбуждения стопора и плату 40 схемы управления. Питание также подается из модуля 120 подачи питания в датчики гибридного устройства 1 обработки через плату 40 схемы управления или через схему 109 возбуждения датчиков, установленную на плате 40 схемы управления.
Выходное напряжение модуля 120 подачи питания вводится в схему 109 возбуждения датчиков, и схема 109 возбуждения датчиков выводит уровень напряжения питающего напряжения из модуля 120 подачи питания в качестве цифровых данных в CPU 101. На основе этих цифровых данных, CPU 101 определяет то, находится или нет напряжение модуля 120 подачи питания в нормальном диапазоне.
Гибридное устройство 1 обработки тем самым может считывать MICR-строку и печатать на чеках S и может печатать на рулонной бумаге R. Рабочие модули, которые используются для того, чтобы обрабатывать чеки S согласно управлению посредством платы 40 схемы управления, т.е. мотор 38 транспортировки бланков, мотор 39 открытия валика, средство 44 выравнивания, первая печатающая головка 46, вторая печатающая головка 48, мотор 54 первой каретки и мотор 59 второй каретки, реализуют модуль работы с бланками. Этот модуль работы с бланками также может включать в себя модуль 12 печати на бланках. Рабочие модули, используемые для того, чтобы обрабатывать рулонную бумагу R, т.е. термопечатающая головка 16, мотор 17 транспортировки рулонной бумаги и мотор 24 возбуждения резака, осуществляют модуль работы с рулонной бумагой. Этот модуль работы с рулонной бумагой также может включать в себя модуль 13 печати на рулонной бумаге.
Работа гибридного устройства 1 обработки описывается далее по тексту. Работа, описанная ниже по тексту, осуществляется посредством CPU 101, исполняющего программу, хранимую на флэш-ROM 105.
Гибридное устройство 1 обработки входит в режим ожидания после того, как включается питание. В этом режиме ожидания гибридное устройство 1 обработки перемещает первые транспортировочные валики 34 и вторые транспортировочные валики 37 в открытую позицию посредством мотора 39 открытия валика, и чек S может вставляться во вход 3 носителей. Гибридное устройство 1 обработки также перемещает стопор 44b в тракт 5 транспортировки носителей посредством модуля возбуждения 44а стопора.
Когда вставка чека S обнаруживается в этом состоянии ожидания, CPU 101 обрабатывает чек S, как показано на фиг.5.
Когда команда для обработки рулонной бумаги R принимается из хост-компьютера 200 в режиме ожидания, CPU 101 обрабатывает рулонную бумагу R, как показано на фиг.6.
Когда чек S вставляется из выхода 4 носителей в режиме ожидания, CPU 101 выполняет процесс печати проверки достоверности, как показано на фиг.7.
Фиг.5 является блок-схемой последовательности операций способа, показывающей работу гибридного устройства 1 обработки во время нормальной работы для обработки чека.
В режиме ожидания, описанном выше по тексту, CPU 101 ожидает вставки чека S из входа 3 носителей (этап S11). Когда CPU 101 обнаруживает чек S на основе вывода из BOF-датчика 41, вводимого из схемы 109 возбуждения датчиков (этап S11 возвращает "Да"), он управляет элементом 113 возбуждения моторов, возбуждает мотор 39 открытия валика, чтобы перемещать первые транспортировочные валики 34 и вторые транспортировочные валики 37 в закрытую позицию, и удерживает чек S посредством первых транспортировочных валиков 34 (этап S12).
Когда стопор 44b останавливается в тракте 5 транспортировки носителей, CPU 101 в таком случае управляет мотором 38 транспортировки бланков и вращательно возбуждает первые транспортировочные валики 34, чтобы выравнивать чек S, посредством его перемещения вперед и назад несколько раз (этап S13). Эта работа выравнивания приводит в действие чек S относительно стопора 44b и выравнивает его ориентацию.
CPU 101 обнаруживает присутствие чека S на основе вывода BOF-датчика 41 (этап S14), и если чек S не обнаруживается, определяет то, что возникла рабочая ошибка либо чек был извлечен, и прерывает этот процесс.
Если чек S обнаруживается посредством BOF-датчика 41 (этап S14 возвращает "Да"), CPU 101 возбуждает модуль 44а возбуждения стопора и перемещает назад стопор 44b из тракта 5 транспортировки носителей (этап S15).
CPU 101 затем считывает символы, отпечатанные магнитными чернилами на чеке S, на основе выходных значений из MICR-головки 42 при транспортировке чека S посредством первых транспортировочных валиков 34 (этап S16).
Когда печать на задней стороне чека S инструктируется посредством команды, принимаемой из хост-компьютера 200, CPU 101 транспортирует чек S в позицию печати посредством возбуждения мотора 38 транспортировки бланков вперед и транспортировки чека S в сторону выхода тракта 5 транспортировки носителей или изменяя направление хода мотора 38 транспортировки бланков и транспортировки чека S в сторону входа тракта 5 транспортировки носителей (этап S17). CPU 101 затем печатает на задней стороне чека S посредством первой печатающей головки 46 (этап S18).
Когда печать на лицевой стороне чека S инструктируется посредством команды, принимаемой из хост-компьютера 200, CPU 101 транспортирует чек S в позицию печати на лицевой стороне (этап S19). Более конкретно, CPU 101 транспортирует чек S в позицию печати посредством возбуждения мотора 38 транспортировки бланков вперед и транспортировки чека S в сторону выхода тракта 5 транспортировки носителей или разворота мотора 38 транспортировки бланков и транспортировки чека S в сторону входа тракта 5 транспортировки носителей согласно позиции печати на чеке S. После того, как чек S достигает позиции печати на лицевой стороне, CPU 101 управляет схемой 111 возбуждения головок и печатает на лицевой стороне чека S посредством второй печатающей головки 48 (этап 320).
После того, как печать на лицевой стороне чека завершается, CPU 101 возбуждает мотор 38 транспортировки бланков и выгружает чек S из выхода 4 носителей посредством вторых транспортировочных валиков 37 (этап S21).
Чек S в это время достигает позиции, выступающей из выхода 4 носителей, но задний конец чека S по-прежнему находится в выходе 4 носителей, и присутствие чека S обнаруживается посредством EJD-датчика 49. CPU 101 ожидает до тех пор, пока оператор не извлечет чек S (этап S22). Когда чек S извлечен, и CPU 101 обнаруживает изменение в состоянии обнаружения EJD-датчика 49 (этап S23 возвращает "Да"), CPU 101 возбуждает мотор 39 открытия валика и модуль 44а возбуждения стопора и возвращается в режим ожидания, описанный выше по тексту (этап S24). Как результат, гибридное устройство 1 обработки считывает символы, отпечатанные магнитными чернилами, когда чек S вставлен, и печатает на лицевой и задней стороне чека S.
Фиг.6 является блок-схемой последовательности операций, показывающей нормальную работу при печати на рулонной бумаге.
Когда CPU 101 принимает команду, инструктирующую печать на рулонной бумаге R, из хост-компьютера 200 (этап S31), он начинает работу, показанную на фиг.6, считывает принятую команду из буфера 104 приема и определяет то, является ли команда командой печати (этап S32). Если принятая команда является командой печати, и данные печати принимаются вслед за командой (этап S32 возвращает "Да"), CPU 101 включает питание термопечатающей головки 16, прикладывает тепло к печатающей поверхности рулонной бумаги R и печатает в ходе возбуждения мотора 17 транспортировки рулонной бумаги и транспортирует рулонную бумагу R (этап S33). Когда печать завершена, CPU 101 транспортирует рулонную бумагу R до тех пор, пока конец позиции печати на рулонной бумаге R не достигает позиции модуля 21 автоматического резака бумаги (этап S34), и затем возбуждает мотор 24 возбуждения резака и отрезает рулонную бумагу R (этап S35).
Если команда, принимаемая из хост-компьютера 200, не является командой печати, CPU 101 управляет мотором 17 транспортировки рулонной бумаги, транспортирует рулонную бумагу R указанной величины (этап S3 6), возбуждает мотор 24 возбуждения резака и отрезает рулонную бумагу R (этап S37).
Фиг.7 является блок-схемой последовательности операций нормальной работы во время процесса печати проверки достоверности.
Когда чек S вставляется из выхода 4 носителей в режиме ожидания, и его передний конец достигает паза 50, CPU 101 обнаруживает вставку чека S на основе изменения в выводе из датчика 45 проверки достоверности (этап S41). CPU 101 ожидает до тех пор, пока команда печати не будет принята из хост-компьютера 200 (этап S42), и когда команда печати принята из хост-компьютера 200, выполняет процесс печати проверки достоверности на чеке S с использованием первой печатающей головки 46 или второй печатающей головки 48 согласно принятой команде (этап S43). Когда печать завершена, CPU 101 ожидает извлечение чека S оператором. Когда извлечение чека S обнаруживается на основе изменения в выводе из датчика 45 проверки достоверности и EJD-датчика 49, CPU 101 возвращается в режим ожидания.
Либо модуль работы с бланками, либо модуль работы с рулонной бумагой может становиться неиспользуемым в гибридном устройстве 1 обработки, которое имеет модуль работы с бланками и модуль работы с рулонной бумагой, как описано выше по тексту. Это может происходить по множеству различных причин, включающих в себя обнаружение датчиком 23 оставшейся рулонной бумаги того, что осталось недостаточно рулонной бумаги R, обнаружение датчиком 117 открытой крышки того, что крышка 9 доступа открыта, либо обнаружение датчиком 75 температуры первой печатающей головки, датчиком 76 температуры второй печатающей головки или датчиком 77 температуры термопечатающей головки того, что соответствующая головка перегрета. Такие события называются ошибками автономного режима, и модуль работы, в котором возникает такое событие, не может продолжать работу до тех пор, пока проблема не скорректирована.
Когда такая ошибка автономного режима возникает в устройстве согласно предшествующему уровню техники, устройство полностью переходит в автономный режим и не может принимать команды, отправляемые из хост-компьютера 200. В этом варианте осуществления изобретения, однако, только модуль работы, в котором ошибка автономного режима возникает, останавливает работу, а другие модули работы и CPU 101 могут продолжать работу, чтобы управлять другими частями. Это описывается далее по тексту со ссылкой на фиг.8.
Фиг.8 является блок-схемой последовательности операций работы, когда возникает ошибка автономного режима.
Когда ошибка автономного режима возникает (этап S51), CPU 101 начинает этот процесс как процесс прерывания. CPU 101 идентифицирует модуль работы, который должен быть остановлен, поскольку возникла ошибка автономного режима (этап S52), и переходит в ограниченный режим работы (этап S53). Этот ограниченный режим работы является состоянием, в котором CPU 101 не исполняет рабочие команды, т.е. команды, побуждающие модуль работы выполнять работу, для модуля работы, в котором возникла ошибка автономного режима, но может исполнять команды, отличные от рабочих команд, для автономного модуля работы.
Например, ошибка автономного режима возникает в модуле работы с рулонной бумагой, когда в гибридном устройстве 1 обработки заканчивается рулонная бумага. Когда это происходит, CPU 101 не может исполнять рабочие команды, заставляющие модуль работы с рулонной бумагой выполнять работу (в том числе команды транспортировки рулонной бумаги, команды принтера и команды возбуждения резака).
CPU 101 может исполнять другие команды, включающие в себя команды для управления модулем работы с бланками, изменения настроек, выполненных посредством CPU 101 гибридного устройства 1 обработки, и сохранения данных изображений для логотипа, печатаемого на рулонной бумаге R. Когда рабочая команда для модуля работы, который не может исполнять команду, принимается из хост-компьютера 200 в этом ограниченном режиме работы, осуществляется вход в режим остановленной работы, в котором вся работа останавливается.
После перехода в ограниченный режим работы CPU 101 ожидает, чтобы принимать команду, отправляемую из хост-компьютера 200 (этап S54), и когда команда принята (этап S54 возвращает "Да"), определяет то, является ли принятая команда командой управления в реальном времени (этап S55).
Команда управления в реальном времени является командой, которая предварительно задается для исполнения посредством CPU 101 с приоритетом над другими командами, и может быть одной или более командами управления в реальном времени. Примеры команды управления в реальном времени включают в себя команду перезагрузки, которая перезагружает гибридное устройство 1 обработки, команду очистки буфера, которая очищает команды и данные, хранимые в буфере 104 приема, команду автоматического возврата состояния (ASB), которая включает-выключает ASB-функцию, которая отправляет рабочее состояние гибридного устройства 1 обработки в хост-компьютер 200, и команду для открытия выдвижного ящика для денег, когда выдвижной ящик для денег (не показан на чертеже) соединяется с гибридным устройством 1 обработки. Когда принятая команда является командой управления в реальном времени (этап S55 возвращает "Да"), CPU 101 считывает и исполняет команду из буфера 104 приема (этап S56).
CPU 101 затем определяет то, разрешена ли ошибка автономного режима (этап 357). Если ошибка автономного режима разрешена (этап S57 возвращает "Нет"), нормальная работа возобновляется (этап S58), и этот процесс завершается.
Например, если ошибка автономного режима является ошибкой в данных печати для модуля работы с бланками или модуля работы с рулонной бумагой, и команда перезагрузки принимается как команда управления в реальном времени, CPU 101 перезагружает гибридное устройство 1 обработки. Если ошибка автономного режима разрешается перезагрузкой, нормальная работа может возобновляться. Нормальная работа также может быть возобновлена на этапе S57, если ошибка автономного режима разрешается посредством пользовательского действия, к примеру, добавления пользователем рулонной бумаги R во время ограниченного режима работы или закрытия крышки 9 доступа, или если ошибка автономного режима разрешается естественным образом, к примеру, когда температура, обнаруживаемая датчиком 75 температуры первой печатающей головки, датчиком 76 температуры второй печатающей головки или датчиком 77 температуры термопечатающей головки, падает достаточно естественным образом.
Если ошибка автономного режима остается неразрешенной, CPU 101 возвращается к этапу S54.
Если команда, принимаемая из хост-компьютера 200 на этапе S54, не является командой управления в реальном времени (этап 355 возвращает "Нет"), CPU 101 определяет то, является ли команда рабочей командой, инструктирующей остановленному модулю работы выполнять работу (этап S59). Если команда является рабочей командой для остановленного модуля работы (этап S59 возвращает "Да"), CPU 101 переходит в режим остановленной работы (этап S61) и затем переходит к этапу S57. Команды управления в реальном времени могут быть приняты и исполнены в режиме остановленной работы, но другие команды не могут быть исполнены. Как результат, даже модуль работы с бланками останавливает работу, когда ошибка автономного режима возникает в модуле работы для рулонной бумаги, и осуществляется вход в ограниченный режим работы.
Когда ASB-функция активируется посредством ASB-команды из хост-компьютера 200, CPU 101 отправляет информацию состояния, обозначающую текущее рабочее состояние, в хост-компьютер 200 по запросу посредством интерфейса 107 связи.
Когда осуществляется вход в режим остановленной работы, CPU 101 отправляет сигнал занятости в хост-компьютер 200 посредством интерфейса 107 связи. Этот сигнал занятости является сигналом, который возвращается, когда команда, отправляемая из хост-компьютера 200, не может быть исполнена и является командой, запрашивающей хост-компьютер 200, чтобы остановить отправку команд, отличных от команд управления в реальном времени. После приема сигнала занятости хост-компьютер 200 ожидает без отправки команд, отличных от команд управления в реальном времени, в гибридное устройство 1 обработки. Когда работа возвращается из режима остановленной работы в нормальный рабочий режим на этапе S58, CPU 101 отправляет сигнал готовности посредством интерфейса 107 связи. Сигнал готовности является сигналом, который отправляется, когда команды, отправляемые из хост-компьютера 200, могут быть приняты и исполнены, и является сигналом, запрашивающим хост-компьютер 200, чтобы возобновлять отправление команд. Как результат отправки посредством CPU 101 этого сигнала занятости и сигнала готовности, хост-компьютер 200 может точно определять состояние и надлежащим образом управлять гибридным устройством 1 обработки.
Как описано выше по тексту, гибридное устройство 1 обработки согласно этому варианту осуществления изобретения имеет CPU 101, который исполняет команды, принимаемые из хост-компьютера 200, и управляет модулем работы с рулонной бумагой, который записывает на рулонной бумаге R, и модулем работы с бланками, который обрабатывает чеки S, которые являются носителем записи, отличным от рулонной бумаги R, в качестве множества модулей работы, которые обрабатывают рулонную бумагу R и чеки S, которые представляют множество носителей записи.
Когда CPU 101 обнаруживает в нормальном рабочем режиме, что любой из модулей работы стал неспособен исполнять команды, применяемые к нему, CPU 101 переходит в ограниченный режим работы, в котором команды для этого модуля работы не могут быть исполнены, но команды из хост-компьютера 200 могут быть приняты, и команды для других модулей работы могут быть исполнены. Как результат, CPU 101 останавливает работу только модуля работы, который неспособен исполнять рабочие команды вследствие ошибки или другой причины, но может продолжать прием других команд и может продолжать работу другими модулями работы на основе принятых команд. Как результат, можно надежно не допускать остановки работы всех функций в гибридном устройстве 1 обработки, которое может выполнять многочисленные операции, когда существует проблема с одной операцией.
Когда команда для модуля работы, который неспособен исполнять рабочие команды, принимается из хост-компьютера 200 после входа в ограниченный режим работы, CPU 101 входит в режим остановленной работы, в котором прием дополнительных команд и исполнение команд для других модулей работы запрещается, тем самым исключая продолжение приема команд, которые не могут быть исполнены, или потери команд, которые не могут быть исполнены. Как результат, хост-компьютер 200 может надежно управлять гибридным устройством 1 обработки.
Даже в режиме остановленной работы, CPU 101 может принимать и исполнять команды управления в реальном времени, отправляемые из хост-компьютера 200, и может отправлять текущее рабочее состояние в хост-компьютер 200. Как результат, CPU 101 может надежно сообщать режим остановленной работы в хост-компьютер 200, и хост-компьютер 200 может надежно управлять гибридным устройством 1 обработки. Хост-компьютер 200 также может управлять удалением команд, которые уже приняты, и может побуждать гибридное устройство 1 обработки возвращаться из режима остановленной работы.
Когда ошибка автономного режима, которая является причиной входа в ограниченный режим работы, разрешается посредством пользовательского действия, такого как управление рабочей панелью 7 (к примеру, выключение и включение питания или нажатие кнопки перезагрузки), открытие крышки 9 доступа и устранение замятия рулонной бумаги R или добавление рулонной бумаги R, или извлечение замятого чека S, либо посредством исполнения конкретной команды, принимаемой из хост-компьютера 200, к примеру, команды, чтобы удалять ранее принятые команды, CPU 101 отменяет ограниченный режим работы и возвращается в нормальный рабочий режим. Как результат, гибридное устройство 1 обработки может легко восстанавливаться в нормальный рабочий режим посредством пользовательского действия или отправки команды из хост-компьютера 200.
Поскольку CPU 101 отправляет сигнал занятости, указывающий, что рабочие команды для модуля работы не могут быть исполнены, в хост-компьютер 200 при входе в режим остановленной работы, хост-компьютер 200 может знать, что устройство обработки носителей входит в режим остановленной работы. Как результат, хост-компьютер 200 может эффективно управлять устройством обработки носителей, например, посредством остановки отправки рабочих команд в устройство обработки носителей или начала работы, которая разрешает режим остановленной работы.
Предпочтительный вариант осуществления изобретения описывается выше по тексту, но изобретение не ограничено таким образом. Например, вышеприведенный вариант осуществления описывает конфигурацию, имеющую модуль работы с рулонной бумагой для печати на рулонной бумаге R и модуль работы с бланками для печати на чеках S, но модули работы изобретения не ограничены таким образом. Например, сканер, который оптически считывает чеки S, также может обеспечиваться в качестве модуля работы. Помимо этого, команда перезагрузки и команда очистки буфера используются в качестве примеров команд управления в реальном времени в вышеприведенном варианте осуществления, но изобретение не ограничено таким образом, и конкретные команды могут быть любыми подходящими командами из системы команд устройства. Помимо этого, модуль 12 печати на бланках в этом варианте осуществления изобретения выполнен с точечной ударной печатающей головкой, но изобретение также может использоваться с другими типами печатающих головок, которые возбуждаются установленными на каретке, в том числе струйными печатающими головками. Помимо этого, программа, которая прогоняется посредством CPU 101 гибридного устройства 1 обработки, чтобы выполнять вышеописанную работу, может быть сохранена и считана и исполнена с носителя записи в гибридном устройстве 1 обработки или с носителя данных во внешнем устройстве.
Таким образом, из описанного изобретения должно быть очевидным, что оно может варьироваться множеством способов. Эти вариации не должны трактоваться как отступление от сущности и объема изобретения, и специалистам в данной области техники должно быть очевидным то, что все эти модификации имеют намерение быть включенными в объем прилагаемой формулы изобретения.
Устройство обработки носителей имеет множество модулей работы, которые обрабатывают рулонную бумагу и чеки в качестве множества носителей записи, и CPU, который управляет многочисленными модулями работы посредством исполнения команд, принимаемых из хост-компьютера. Когда CPU обнаруживает во время нормального рабочего режима, что команды для любого из модулей работы не могут быть выполнены, CPU переходит в ограниченный режим, в котором не могут быть выполнены команды для этого модуля работы, но команды из хост-компьютера могут быть приняты, и команды для других модулей работы могут быть выполнены. Технический результат - обеспечение возможности недопущения прерывания всех функций устройства, когда запись становится запрещенной в устройстве, имеющем многочисленные функции, включающие в себя запись на носителе записи. 3 н. и 10 з.п. ф-лы. 8 ил.
1. Устройство обработки носителей, содержащее:
- множество модулей работы, которые соответственно обрабатывают множество носителей записи; и
- модуль управления, который исполняет команды, принимаемые из хост-компьютера, и управляет модулями работы, при этом
когда модуль управления обнаруживает в нормальном рабочем режиме, что команды для любого из модулей работы не могут быть исполнены, модуль управления переключается в ограниченный режим работы, в котором команды для упомянутого модуля работы не могут быть исполнены, а команды из хост-компьютера могут быть приняты, и команды для других модулей работы могут быть исполнены, и когда дополнительная команда для модуля работы, который не может исполнять команды, принимается из хост-компьютера после того, как модуль управления переключился в ограниченный режим работы, модуль управления переключается в режим остановленной работы, в котором прием дополнительных команд и исполнение команд для других модулей работы также запрещаются.
2. Устройство обработки носителей по п.1, в котором:
- модуль управления может принимать и исполнять команды управления в реальном времени, отправляемые из хост-компьютера, и может отправлять рабочее состояние в хост-компьютер в режиме остановленной работы.
3. Устройство обработки носителей по п.1, дополнительно содержащее:
- рабочий модуль;
в котором модуль управления отменяет ограниченный режим работы и возвращается в нормальный рабочий режим, когда причина для входа в ограниченный режим работы разрешается посредством конкретного ввода из рабочего модуля или посредством исполнения конкретной команды, принимаемой из хост-компьютера.
4. Устройство обработки носителей по п.1, в котором:
- модуль управления отправляет сигнал в хост-компьютер,
указывающий, что команды для модуля работы, который не может исполнять команды, не могут быть исполнены при входе в ограниченный режим работы.
5. Устройство обработки носителей по п.1, в котором:
- множество носителей записи включает в себя рулонную бумагу и бланки;
- множество модулей работы включает в себя модуль работы рулонной бумаги, который обрабатывает рулонную бумагу, и модуль работы бланков, который обрабатывает бланки; и
- каждый из модуля работы рулонной бумаги и модуля работы бланков имеет модуль записи для записи на носитель записи.
6. Способ управления устройством обработки носителей,
который управляет устройством обработки носителей, имеющим множество модулей работы для обработки множества носителей записи, содержащий этапы, на которых:
- исполняют команды, принимаемые из хост-компьютера, и управляют соответствующими модулями работы;
- когда в нормальном рабочем режиме обнаруживается то, что команды для любого из модулей работы не могут быть исполнены, обеспечивают ограниченный режим работы, в котором команды для этого модуля работы не могут быть исполнены, а команды из хост-компьютера могут быть приняты, и команды для других модулей работы могут быть исполнены, и
- входят в режим остановленной работы, в котором прием дополнительных команд и исполнение команд для других модулей работы также запрещаются, когда команда для модуля работы, который не может исполнять команды, принимается из хост-компьютера после входа в ограниченный режим работы.
7. Способ управления устройством обработки носителей, который управляет устройством обработки носителей, имеющим множество модулей работы для обработки множества носителей записи, по п.6, в котором:
- команды управления в реальном времени, отправляемые из хост-компьютера, могут быть приняты и исполнены, и рабочее состояние может быть отправлено в хост-компьютер в режиме остановленной работы.
8. Способ управления устройством обработки носителей, который управляет устройством обработки носителей, имеющим множество модулей работы для обработки множества носителей записи, по п.6, дополнительно содержащий этап, на котором:
- отменяют ограниченный режим работы и возвращаются в нормальный рабочий режим, когда причина для входа в ограниченный режим работы разрешается посредством конкретного ввода из рабочего модуля или посредством исполнения конкретной команды, принимаемой из хост-компьютера.
9. Способ управления устройством обработки носителей, который управляет устройством обработки носителей, имеющим множество модулей работы для обработки множества носителей записи, по п.6, дополнительно содержащий этап, на котором:
- отправляют сигнал в хост-компьютер, указывающий, что команды для модуля работы, который не может исполнять команды, не могут быть исполнены при входе в ограниченный режим работы.
10. Считываемый компьютером носитель записи, хранящий программу, которая может быть исполнена модулем управления, который управляет устройством обработки носителей, имеющим множество модулей работы для обработки множества носителей записи, причем программа побуждает модуль управления исполнять этапы, на которых:
- исполняют команды, принимаемые из хост-компьютера, и управляют соответствующими модулями работы;
- когда в нормальном рабочем режиме обнаруживается то, что команды для любого из модулей работы не могут быть исполнены, обеспечивают ограниченный режим работы, в котором команды для этого модуля работы не могут быть исполнены, а команды из хост-компьютера могут быть приняты, и команды для других модулей работы могут быть исполнены, и
- входят в режим остановленной работы, в котором прием дополнительных команд и исполнение команд для других модулей работы также запрещаются, когда команда для модуля работы, который не может исполнять команды, принимается из хост-компьютера после входа в ограниченный режим работы.
11. Считываемый компьютером носитель записи, хранящий программу, которая может быть исполнена модулем управления, который управляет устройством обработки носителей, имеющим множество модулей работы для обработки множества носителей записи, по п.10, в котором:
- команды управления в реальном времени, отправляемые из хост-компьютера, могут быть приняты и исполнены, и рабочее состояние может быть отправлено в хост-компьютер в режиме остановленной работы.
12. Считываемый компьютером носитель записи, хранящий программу, которая может быть исполнена модулем управления, который управляет устройством обработки носителей, имеющим множество модулей работы для обработки множества носителей записи, по п.10, дополнительно содержащий этап, на котором:
- отменяют ограниченный режим работы и возвращаются в нормальный рабочий режим, когда причина для входа в ограниченный режим работы разрешается посредством конкретного ввода из рабочего модуля или посредством исполнения конкретной команды, принимаемой из хост-компьютера.
13. Считываемый компьютером носитель записи, хранящий программу, которая может быть исполнена модулем управления, который управляет устройством обработки носителей, имеющим множество модулей работы для обработки множества носителей записи, по п.10, дополнительно содержащий этап, на котором:
- отправляют сигнал в хост-компьютер, указывающий, что команды для модуля работы, который не может исполнять команды, не могут быть исполнены при входе в ограниченный режим работы.
| WO 9928829 A1, 10.06.1999 | |||
| JP 3225593 A, 04.10.1991 | |||
| JP 2010017965 A, 28.01.2010 | |||
| JP 2002265096 A, 18.09.2002. |

