Техническое решение относится к колесным транспортным средствам. Оно касается грузового автомобиля со всеми ведущими колесами, способного передвигаться в любых дорожных условиях.
В трансмиссиях автомобилей, имеющих привод всех колес, применяются раздаточные коробки с межосевыми дифференциалами, содержащими один или два планетарных ряда, которые показаны, например, в патентах №№2026208, 2093374, 2192972, выданных в Российской Федерации. В трансмиссии автомобиля, изображенной в заявке №180374 на выдачу европейского патента, в патенте №4650202, выданном в США, используется раздаточная коробка с межосевым дифференциалом, содержащим три планетарных ряда, переключаемых вручную зубчатой муфтой. Однако переключение вручную трех планетарных рядов отвлекает внимание водителя от слежения за дорожной ситуацией и требует от него дополнительных манипуляций с органами управления автомобилем. В качестве близкого аналога принят грузовой автомобиль со всеми ведущими колесами, изображенный в выданном в США патенте №4280583, МПК В60К 17/34, содержащий раму для установки на нее кузова, трансмиссию для передачи поворотного момента от двигателя к передним и задним колесам. В трансмиссии расположена раздаточная коробка с межосевым дифференциалом, содержащим планетарный ряд, распределяющий в определенной пропорции передаваемые к колесам поворотные моменты. Однако в этом автомобиле соотношение поворотных моментов, поступающих к передним и задним колесам, остается неизменным при движении автомобиля как с грузом в кузове, так и при его движении без груза, что ухудшает проходимость и управляемость автомобиля, повышает износ шин его колес.
Задачей является улучшение управляемости и проходимости грузового автомобиля со всеми ведущими колесами, уменьшение износа шин его колес путем обеспечения своевременного перераспределения нагрузки на колеса автомобиля при укладке груза в кузов с учетом массы уложенного груза.
Решение задачи обеспечено тем, что грузовой автомобиль, имеющий привод всех колес, содержит раму, кузов для перевозки груза, установленный на раме, тензометрический датчик, реагирующий на присутствие груза в кузове, трансмиссию для передачи поворотного момента от двигателя к передним и задним колесам, в которой расположены коробка передач со сцеплением и раздаточная коробка с межосевым дифференциалом, содержащим три планетарных ряда, переключаемых зубчатой муфтой, имеющей гидравлический привод от поршня, расположенного в трехсекционной рабочей камере, в которой вместе с упомянутым основным поршнем расположен дополнительный поршень большего диаметра, образующий подвижный упор для основного поршня, передняя секция рабочей камеры, расположенная перед основным поршнем, и средняя секция, расположенная между основным и дополнительным поршнями, соединены гидролиниями с двухпозиционным гидравлическим распределителем для поочередной подачи в них рабочей жидкости от источника ее давления, задняя секция рабочей камеры сообщена гидролинией через клапан с ее передней секцией. Распределитель имеет управление от электромагнита, подключенного электрической цепью через пороговый элемент к упомянутому тензометрическому датчику, реагирующему на присутствие груза в кузове автомобиля, а клапан, расположенный в гидролинии, сообщающей заднюю секцию рабочей камеры с передней секцией, имеет управление от электромагнита, подключенного к тензометрическому датчику через другой пороговый элемент, имеющий более высокий порог срабатывания.
Вследствие использования в трансмиссии грузового автомобиля со всеми ведущими колесами раздаточной коробки с межосевым дифференциалом, содержащим три планетарных ряда, переключаемых автоматически зубчатой муфтой при укладке груза в кузов по сигналу, поступающему к приводу муфты от гидравлического распределителя и от клапана, управляемых электромагнитами, подключенными через пороговые элементы к тензометрическому датчику, реагирующему на присутствие груза в кузове автомобиля, улучшается управляемость и проходимость, а также уменьшается износ шин вследствие рационального распределения нагрузки на колеса автомобиля при порожнем и при загруженном кузове. Кроме того, облегчается обслуживание автомобиля, так как перераспределение нагрузки на колеса при укладке груза в кузов происходит автоматически, не требуя участия в нем водителя автомобиля. При этом поступление сигнала от тензометрического датчика через пороговые элементы, имеющие разный порог срабатывания, обеспечивает более точный учет массы перевозимого груза при перераспределении поворотных моментов на колесах.
Тензометрический датчик, которым снабжен грузовой автомобиль для учета массы перевозимого груза, размещен между кузовом и рамой под передним участком кузова, а задний участок кузова соединен с рамой шарнирно.
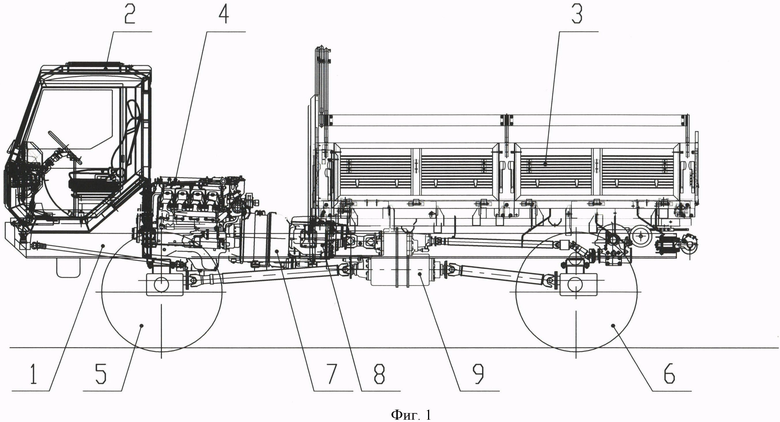
На фигуре 1 изображен грузовой автомобиль, имеющий привод всех колес.
На фигуре 2 представлена раздаточная коробка грузового автомобиля с межосевым дифференциалом, содержащим три планетарных ряда.
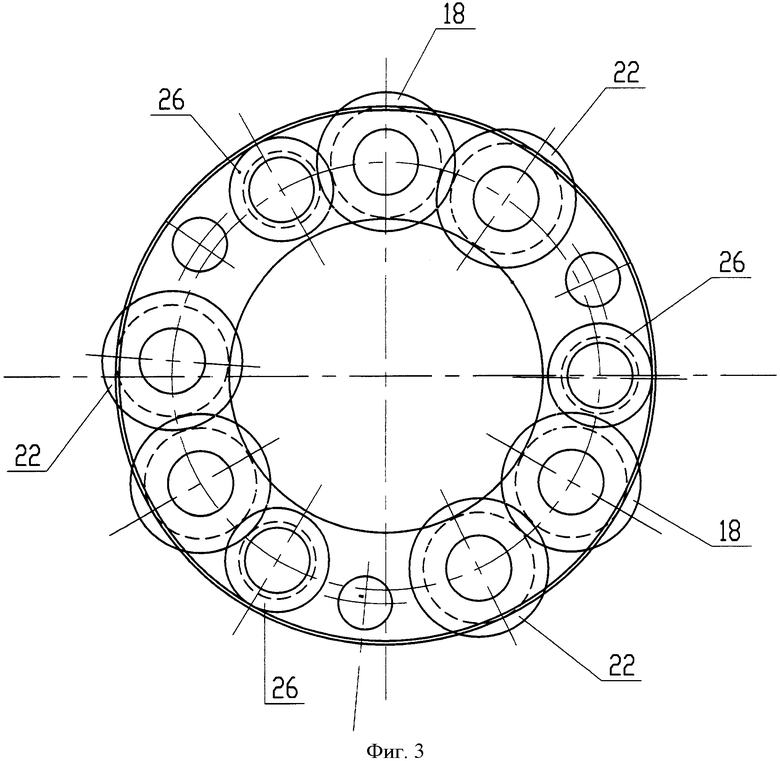
На фигуре 3 показано расположение сателлитов планетарных рядов.
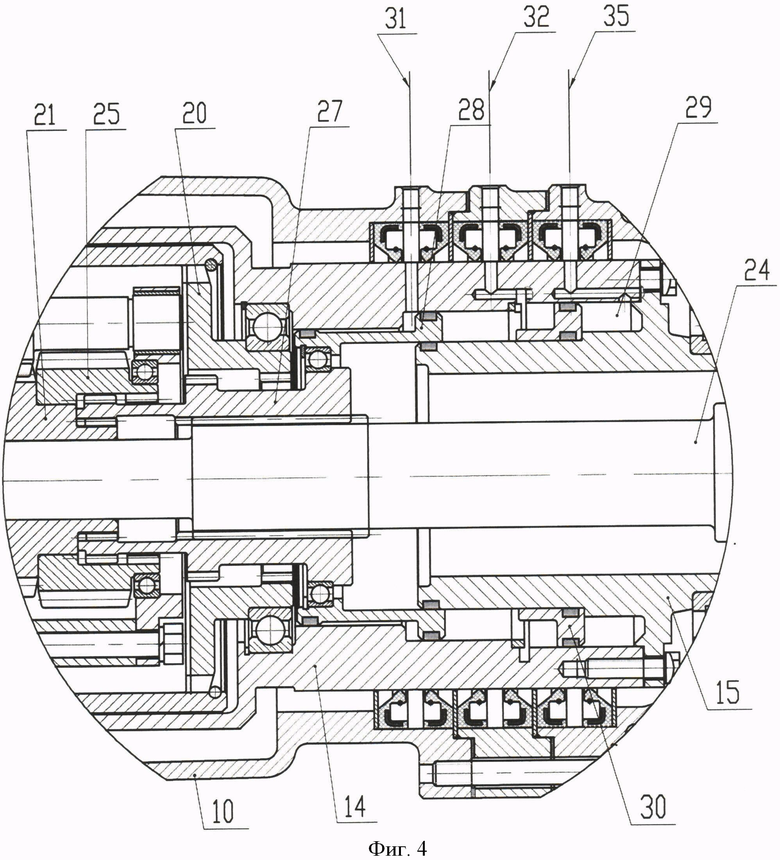
На фигуре 4 показан привод зубчатой муфты управления межосевым дифференциалом.
Представленный на фигуре 1 грузовой автомобиль, имеющий привод всех колес, содержит раму 1, на которой впереди расположена кабина 2, а за ней установлен кузов 3, предназначенный для перевозки груза. Между кабиной и кузовом на раме установлен двигатель 4. Автомобиль содержит трансмиссию для передачи поворотного момента от двигателя к передним колесам 5 и к задним колесам 6. В трансмиссии расположены сцепление 7, представляющее собой фрикционную муфту, ступенчатая коробка передач 8, раздаточная коробка 9, содержащая межосевой дифференциал, и карданные передачи для связи валов раздаточной коробки с валами коробки передач и ведущих мостов.
Раздаточная коробка 9 содержит картер 10, в котором установлен ведущий вал 11 (фигура 2), имеющий привод от выходного вала коробки передач 8. С ведущим валом раздаточной коробки связан зубчатой передачей полый ведомый вал 12. С валом 12 жестко соединено водило 13 межосевого дифференциала, содержащее трубчатый корпус 14, соединенный с трубчатым фланцем 15, установленным на подшипнике качения в картере 10. Межосевой дифференциал содержит три планетарных ряда. В первом планетарном ряду расположены солнечная шестерня 16, имеющая шлицевое соединение с валом 17 привода передних колес 5 автомобиля, сателлиты 18 и коронное зубчатое колесо 19, снабженное ступицей 20 с внутренними зубьями, установленной на подшипнике качения в корпусе 14 водила. Во втором планетарном ряду расположены солнечная шестерня 21 и сателлиты 22, имеющие зацепление с сателлитами 18 первого планетарного ряда. Солнечная шестерня 21 второго планетарного ряда установлена с возможностью вращения на шейке 23 вала 24 привода задних колес 6 автомобиля и имеет на своей ступице наружный зубчатый венец. Третий планетарный ряд составляют солнечная шестерня 25, имеющая внутренний зубчатый венец, и сателлиты 26, которые находятся в зацеплении с сателлитами 18 первого планетарного ряда (фигура 3). Диаметр солнечной шестерни 25 больше диаметра солнечных шестерен 16 и 21. Солнечная шестерня 25 третьего планетарного ряда расположена на ступице солнечной шестерни 21 второго планетарного ряда и, кроме того, она установлена в водиле 13 в прикрепленной к нему кольцевой детали, образующей опору для сателлитов.
Для изменения кинематических связей в межосевом дифференциале при необходимости перераспределения поворотных моментов на валах 17 и 24 привода колес при укладке груза в кузов автомобиля раздаточная коробка содержит зубчатую муфту 27, имеющую шлицевое соединение с валом 24 привода задних колес. Зубчатая муфта 27 (фигура 4) имеет три зубчатых венца, а именно внутренний зубчатый венец, имеющий возможность зацепления с наружным зубчатым венцом солнечной шестерни 21 второго планетарного ряда, и два наружных зубчатых венца, имеющих возможность поочередного зацепления с внутренними зубчатыми венцами, сделанными внутри солнечной шестерни 25 и внутри ступицы 20 коронного зубчатого колеса 19. Зубчатая муфта 27 имеет гидравлический привод через подшипник качения от поршня 28, расположенного в ступенчатой трехсекционной рабочей камере 29, образованной между трубчатым корпусом 14 водила и его трубчатым фланцем 15. В рабочей камере 29 вместе с поршнем 28, который является основным, расположен дополнительный поршень 30 большего диаметра, образующий подвижный упор для основного поршня 28. Передняя секция рабочей камеры 29, расположенная перед основным поршнем 28, и средняя секция, расположенная между основным 28 и дополнительным 30 поршнями, соединены гидролиниями 31 и 32 с двухпозиционным четырехлинейным гидравлическим распределителем 33, содержащим подпружиненный золотник для поочередной подачи в эти секции рабочей жидкости от источника ее давления, в частности от насоса 34. Задняя секция рабочей камеры 29, расположенная позади дополнительного поршня 30, сообщена гидролинией 35 с ее передней секцией через двухпозиционный клапан 36, снабженный подпружиненным золотником. Распределитель 33 имеет управление от электромагнита 37, подключенного электрической цепью 38 через пороговый элемент 39 и усилитель электрического сигнала к тензометрическому датчику 40, реагирующему на присутствие груза в кузове автомобиля. Клапан 36, расположенный в гидролинии 35, сообщающей заднюю секцию рабочей камеры 29 с передней секцией, имеет управление от электромагнита 41, подключенного к тензометрическому датчику 40 другой электрической цепью 42 через пороговый элемент 43, имеющий более высокий порог срабатывания.
Силоизмерительный тензометрический датчик 40, которым снабжен грузовой автомобиль, расположен между кузовом 3 и рамой 1 под передним участком кузова. Задний участок кузова 3 соединен с рамой шарнирно. Тензометрический датчик 40, используемый для управления распределителем 33, может использоваться также для учета массы груза, перевозимого автомобилем.
При движении автомобиля поворотный момент от двигателя 4 через сцепление 7 и коробку передач 8 поступает к ведущему валу 11 раздаточной коробки 9, а от него через зубчатую передачу передается к ведомому валу 12. От вала 12 имеет привод водило 13 межосевого дифференциала, распределяющего поворотные моменты между колесами автомобиля в зависимости от позиции, занимаемой золотником распределителя 33. При порожнем кузове электрический сигнал от тензометрического датчика 40 отсутствует, то есть нет электрического тока в электрической цепи 38, подключенной к электромагниту 37. При выключенном электромагните 37 золотник распределителя 33 занимает такую позицию, при которой рабочая жидкость поступает от распределителя 33 под давлением, создаваемым насосом 34, в среднюю секцию рабочей камеры 29 позади основного поршня 28. Под действием этого давления поршень 28 занимает такое положение, при котором связанная с ним зубчатая муфта 27 находится в зацеплении с зубчатым венцом солнечной шестерни 21, соединяя ее с валом 24 привода задних колес 6. Тогда поворотный момент от водила 13 поступает к валам 17 и 24 привода колес автомобиля через сателлиты 18 и 22 и через солнечные шестерни 16 и 21. В этом случае, когда нет груза в кузове автомобиля, между валами 17 и 24 привода колес устанавливается наименьшее силовое передаточное число, то есть наименьшее отношение поворотных моментов на этих валах, при котором управляемость автомобиля получается лучше.
При укладке в кузов автомобиля тяжелого груза, такого, при котором электрический сигнал от тензометрического датчика 40 получается весьма значительным и вследствие этого проходит через пороговый элемент 39 к электромагниту 37, золотник распределителя 33 под действием включенного электромагнита 37 занимает такую позицию, при которой рабочая жидкость от распределителя 33 поступает под давлением в переднюю секцию рабочей камеры 29 перед поршнем 28 и проходит через клапан 36 в заднюю секцию рабочей камеры 29 позади дополнительного поршня 30. При поступлении рабочей жидкости под давлением в заднюю секцию рабочей камеры 29 дополнительный поршень 30 перемещается в сторону основного поршня 28 до упора во внутреннюю ступеньку в корпусе 14 водила, а основной поршень 28 перемещается к дополнительному поршню 30 до упора в него. При упоре основного поршня 28 в дополнительный поршень 30 перемещаемая поршнем 28 зубчатая муфта 27 занимает следующее положение, при котором она имеет зацепление с солнечной шестерней 25. При зацеплении зубчатой муфты 27 с солнечной шестерней 25 поворотный момент от водила 13 поступает к валу 24 привода задних колес 6 через сателлит 26 и солнечную шестерню 25, диаметр которой больше диаметра солнечной шестерни 16, расположенной на валу 17 привода передних колес 5. Тогда между валами 17 и 24 привода колес автомобиля устанавливается промежуточное силовое передаточное число, при котором величина поворотного момента на валу 24 привода задних колес 6 получается больше величины поворотного момента на валу 17 привода передних колес 5.
В случае укладки в кузов более тяжелого груза, когда создаваемый тензометрическим датчиком 40 электрический сигнал становится очень большим и вследствие большой его величины проходит через пороговый элемент 43 к электромагниту 41, золотник клапана 36 под действием электромагнита 41 занимает такую позицию, при которой задняя секция рабочей камеры 29 сообщается со сливом. Тогда под действием давления рабочей жидкости в передней секции рабочей камеры 29 поршень 28 отводит зубчатую муфту 27 от солнечной шестерни 25 и вводит ее в зацепление с коронным зубчатым колесом 19 для передачи поворотного момента от него к валу 24 привода задних колес 6. При зацеплении зубчатой муфты 27 с коронным зубчатым колесом 19 между валами 17 и 24 привода колес устанавливается наибольшее силовое передаточное число, при котором величина поворотного момента на валу 24 привода задних колес 6, над которыми расположен загруженный кузов, получается значительно больше величины поворотного момента на валу 17 привода передних колес 5.
После перевозки и выгрузки груза из кузова прекращается поступление электрического сигнала от тензометрического датчика 40 к электромагнитам 37 и 41 управления распределителем 33 и клапаном 36, после чего подпружиненные золотники распределителя и клапана возвращаются в исходную позицию, при которой передняя и задняя секции рабочей камеры 29 сообщаются со сливом, а средняя секция, расположенная позади поршня 28, сообщается через гидролинию 32 с насосом 34. Под действием давления рабочей жидкости в средней секции рабочей камеры 29 поршень 28, перемещаясь, соединяет зубчатой муфтой 27 вал 24 привода задних колес с солнечной шестерни 21. Тогда при переезде порожнего автомобиля к месту погрузки в его кузов следующего груза между валами 17 и 24 привода колес устанавливается наименьшее силовое передаточное число.
В результате использования в трансмиссии грузового автомобиля раздаточной коробки с межосевым дифференциалом, содержащим три планетарных ряда, переключаемых при погрузке груза в кузов, причем с учетом массы груза, по сигналу от установленного под кузовом между ним и рамой тензометрического датчика, реагирующего на присутствие груза в кузове, обеспечивается своевременное автоматическое перераспределение нагрузки на передние и задние колеса автомобиля. Вследствие этого существенно облегчается обслуживание автомобиля, улучшается его проходимость и управляемость, уменьшается износ шин.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВОЙ АВТОМОБИЛЬ СО ВСЕМИ ВЕДУЩИМИ КОЛЕСАМИ | 2011 |
|
RU2483945C1 |
| ГРУЗОВОЙ АВТОМОБИЛЬ С ПЕРЕДНИМИ И ЗАДНИМИ ВЕДУЩИМИ КОЛЕСАМИ | 2011 |
|
RU2483947C1 |
| ГРУЗОВОЙ АВТОМОБИЛЬ С ПЕРЕДНИМ И ЗАДНИМ ВЕДУЩИМИ МОСТАМИ | 2012 |
|
RU2486071C1 |
| ПОЛНОПРИВОДНЫЙ ГРУЗОВОЙ АВТОМОБИЛЬ | 2011 |
|
RU2483944C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МЕЖОСЕВЫМ ДИФФЕРЕНЦИАЛОМ С ТРЕМЯ ПЛАНЕТАРНЫМИ РЯДАМИ | 2011 |
|
RU2483946C1 |
| ТРАНСМИССИЯ ПОЛНОПРИВОДНОГО АВТОМОБИЛЯ | 2012 |
|
RU2486069C1 |
| СИСТЕМА УПРАВЛЕНИЯ МЕЖОСЕВЫМ ДИФФЕРЕНЦИАЛОМ С ТРЕМЯ ПЛАНЕТАРНЫМИ РЯДАМИ | 2011 |
|
RU2483948C1 |
| ТРАНСМИССИЯ ПОЛНОПРИВОДНОГО ГРУЗОВОГО АВТОМОБИЛЯ | 2012 |
|
RU2486070C1 |
| РАЗДАТОЧНАЯ КОРОБКА | 2011 |
|
RU2479444C2 |
| РАЗДАТОЧНАЯ КОРОБКА ПОЛНОПРИВОДНОГО АВТОМОБИЛЯ | 2011 |
|
RU2479445C1 |
Изобретение относится к полноприводным транспортным средствам. Автомобиль содержит кузов для перевозки груза, тензометрический датчик (40), реагирующий на присутствие груза в кузове, трансмиссию, в которой расположены коробка передач со сцеплением и раздаточная коробка с межосевым дифференциалом. Дифференциал содержит три планетарных ряда, переключаемых зубчатой муфтой (27). Муфта (27) имеет гидравлический привод от поршня (28), расположенного в трехсекционной рабочей камере (29), в которой также расположен дополнительный поршень (30) большего диаметра, образующий подвижный упор для поршня (28). Передняя секция рабочей камеры, расположенная перед поршнем (28), и средняя секция, расположенная между поршнями (28) и (30), соединены гидролиниями с двухпозиционным гидравлическим распределителем (33). Задняя секция сообщена гидролинией (35) через клапан (36) с передней секцией рабочей камеры. Распределитель (33) имеет управление от электромагнита (37), подключенного через пороговый элемент (39) к датчику (40). Клапан (36) имеет управление от электромагнита (41), подключенного к датчику (40) через пороговый элемент (43). Достигается улучшение управляемости и проходимости автомобиля. 1 з.п. ф-лы, 4 ил.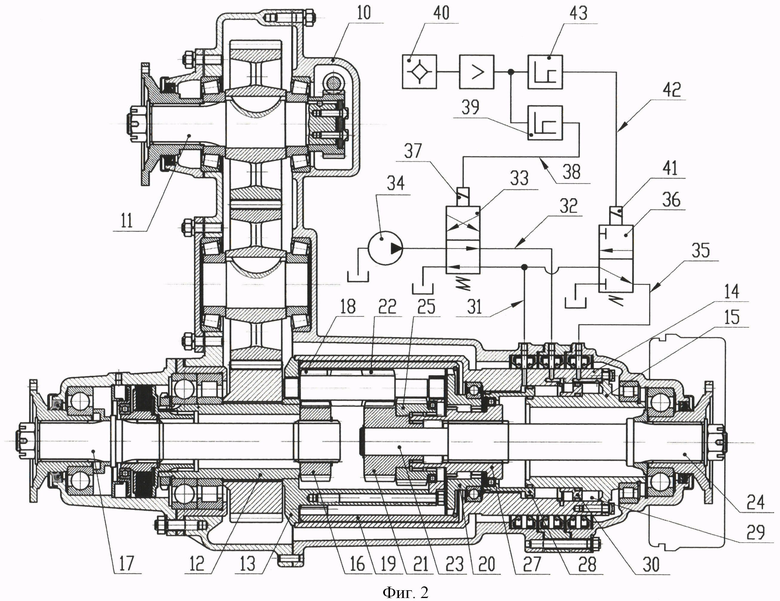
1. Грузовой автомобиль с приводом всех колес, содержащий раму, кузов для перевозки груза, установленный на раме, тензометрический датчик, реагирующий на присутствие груза в кузове автомобиля, трансмиссию для передачи поворотного момента от двигателя к передним и задним колесам, в которой расположены коробка передач со сцеплением и раздаточная коробка с межосевым дифференциалом, содержащим три планетарных ряда, переключаемых зубчатой муфтой, имеющей гидравлический привод от поршня, расположенного в трехсекционной рабочей камере, в которой вместе с упомянутым основным поршнем расположен дополнительный поршень большего диаметра, образующий подвижный упор для основного поршня, передняя секция рабочей камеры, расположенная перед основным поршнем, и средняя секция, расположенная между основным и дополнительным поршнями, соединены гидролиниями с двухпозиционным гидравлическим распределителем для поочередной подачи в них рабочей жидкости от источника ее давления, задняя секция сообщена гидролинией через клапан с передней секцией рабочей камеры, распределитель имеет управление от электромагнита, подключенного электрической цепью через пороговый элемент к упомянутому тензометрическому датчику, реагирующему на присутствие груза в кузове автомобиля, а клапан, расположенный в гидролинии, сообщающей заднюю секцию рабочей камеры с передней секцией, имеет управление от электромагнита, подключенного к тензометрическому датчику через другой пороговый элемент, имеющий более высокий порог срабатывания.
2. Грузовой автомобиль по п.1, отличающийся тем, что упомянутый тензометрический датчик размещен между кузовом и рамой под передним участком кузова, а задний участок кузова соединен с рамой шарнирно.
| US 4280583 A, 28.07.1981 | |||
| US 2002142878 A1, 03.10.2002 | |||
| СПОСОБ ПОЛУЧЕНИЯ ГЕОМЕТРИЧЕСКИ ПОДОБНОГО ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ ПЛОСКОГО ПРЕДМЕТА | 0 |
|
SU180374A1 |
| Двухключевой механический замок для блокировки разъединителей с выключателями в электрических распределительных устройствах | 1952 |
|
SU99389A1 |
| 0 |
|
SU159410A1 | |

