Настоящее изобретение относится к способу и устройству для маркировки поверхности периодическими контролируемыми наноструктурами и к способу и устройству для чтения информации на подобной поверхности. Оно применяется, в частности, для маркировки объекта или документа с целью его идентификации, отслеживания и аутентификации.
Известны многочисленные средства маркировки, например, путем печати или изменения состояния поверхности. Подобные средства маркировки хорошо подходят для серийной маркировки, но не обеспечивают высокой безопасности при идентификации или аутентификации маркированного объекта или документа. В частности, для злоумышленником обычно легко их воспроизвести.
Кроме того, маркировки, известные в уровне техники, обычно являются заметными, что облегчает их обнаружение, анализ или уничтожение злоумышленником.
Научные исследования выявили факт существования периодических структур с периодом в несколько сотен нанометров (см., например, работу MM. GUILLERMIN, F. GARRELIE, N. SANNER, Е. AUDOUARD, H. SODER "Mono- and multi-pulse formation of surface structures under static femtosecond irradiation", принятой в Appl. Surf. Sc.253, 8075-879 - 2007).
В публикации WO 2007/01215 описано получение структуры на поверхности материала или штамповочного инструмента с целью достижения топографического эффекта на этой поверхности. При этом применяются самоадаптирующиеся структуры, предполагающие маркировку непрерывными штрихами, представляющими параллельные структуры по всей длине штриха. Кроме того, при этом в каждой точке штриха при его маркировании требуются десятки и даже сотни лазерных импульсов. Вследствие двух упомянутых свойств подобный способ маркировки является очень медленным и не позволяет наносить иной информации, помимо символов, начерченных штрихами.
В патенте EP 1586405 описана микрообработка с получением структур путем импульсного лазерного облучения. Подобная механическая обработка служит, например, для улучшения механического взаимодействия между двумя деталями. Поэтому она никоим образом не позволяет бороться с подделками.
Настоящее изобретение предназначено для устранения упомянутых недостатков.
В связи с упомянутым выше первым аспектом настоящего изобретения предложен способ маркировки поверхности, отличающийся тем, что он содержит:
- этап кодирования информации в виде изображения, содержащего значения, представляющие кодированную информацию;
- этап точечной маркировки участка указанной поверхности с применением поляризованного лазерного пучка для формирования ориентированных наноструктур на указанной поверхности или в ней, причем поляризацию лазерного пучка в каждой точке маркировки изменяют исходя из значения точки указанного изображения.
Таким образом, в настоящем изобретении дискретные наноструктуры применяются для кодирования информации с использованием ориентации указанных наноструктур. Следует отметить, что настоящее изобретение является применимым для маркировки всех типов материалов, поскольку оно вызывает структурирование поверхности путем ориентации наноструктур, что обеспечивает возможность точечной записи информации в маркировке, причем указанная ориентация воздействует на свет и тем самым обеспечивает возможность чтения изображения. Реализация настоящего изобретения, таким образом, обеспечивает возможность очень быстрой маркировки наряду с высокой плотностью информации на маркируемом участке поверхности.
Информация, представленная в указанном изображении, предпочтительно представляет собой информацию, предназначенную для идентификации, аутентификации и/или отслеживания маркированной поверхности.
Согласно отличительным признакам изобретения, на этапе маркировки производят маркировку контрольного участка, представляющего ориентацию, используемую на этапе чтения указанной маркировки. Благодаря указанным средствам в ходе чтения кода оказываются возможными точная ориентация освещения и повышение считываемости кода.
Согласно отличительным признакам изобретения, способ маркировки, подобный кратко изложенному выше, содержит этап определения подписи, представляющей физические свойства точек маркированного изображения, и этап занесения указанной подписи в память.
Упомянутое физическое свойство представляет собой, например, положение нерегулярностей в структуре, фокусировку лазерного пучка, мощность лазерного пучка, количество импульсов, угол падения или угол поляризации. Таким образом, оказывается возможной дальнейшая идентификация маркированной поверхности исходя из ее подписи. Кроме того, в случае снятия копий с аутентичной поверхности, по меньшей мере для первого поколения копий оказывается вероятным определение подлинной поверхности, использованной для копирования. Таким путем повышается эффективность средств борьбы с подделками, предложенных в настоящем изобретении.
Согласно отличительным признакам изобретения, на этапе маркировки по меньшей мере половина поверхности маркируемого участка подвергается действию только одного лазерного импульса. Благодаря упомянутым средствам повышается скорость маркировки.
Согласно отличительным признакам изобретения, на этапе кодирования информации в виде изображения, содержащего значения, представляющие кодированную информацию, каждая точка указанного изображения может принимать по меньшей мере три различных значения; на этапе маркировки поляризацию лазерного пучка изменяют по меньшей мере в трех направлениях, причем каждое направление поляризации соответствует одному из значений точек в указанном изображении. Так получают маркированный участок, который при освещении светом необходимой ориентации оказывается цветным и обладает высокой плотностью информации.
Согласно отличительным признакам изобретения, на этапе маркировки применяют импульсный лазер с длительностью импульса менее 10×10-12 секунд.
Согласно отличительным признакам изобретения, способ, подобный кратко изложенному выше, содержит этап чтения указанного маркированного изображения на указанной поверхности и этап проверки качества исходя из считанного изображения. Таким образом гарантируется качество маркировки.
Согласно отличительным признакам изобретения, на этапе маркировки применяют лазерный пучок размером менее 25 мкм.
Согласно отличительным признакам изобретения, на этапе маркировки наносят точки, отстоящие друг от друга менее чем на 10 мкм.
Согласно отличительным признакам изобретения, на этапе маркировки применяют лазерный пучок, излучающий свет, длина волны которого близка к 800 нм.
Согласно отличительным признакам изобретения, на этапе кодирования указанное изображение изменяют для каждого из осуществляемых этапов маркировки. Благодаря указанным средствам путем простого чтения кода, представленного маркировкой, оказывается возможной идентификация поверхности, содержащей маркировку, и, соответственно, содержащего ее изделия.
Согласно отличительным признакам изобретения, на этапе кодирования указанная информация представляет данные, относящиеся к объекту или документу, содержащему указанную поверхность. Благодаря упомянутым средствам непосредственное чтение по меньшей мере части кода, представленного маркировкой, позволяет осуществить идентификацию объекта, как и в случае штрих-кода.
Вторым аспектом настоящего изобретения предложено устройство для маркировки поверхности, отличающееся тем, что оно содержит:
- средства кодирования информации в виде изображения;
- средства маркировки указанной поверхности поляризованным лазерным пучком с получением ориентированных наноструктур на указанной поверхности или в ней, причем поляризацию лазерного пучка изменяют в зависимости от каждой точки указанного изображения, получаемого на указанной поверхности.
Третьим аспектом настоящего изобретения предложен способ чтения изображения, маркированного на поверхности, отличающийся тем, что он содержит:
- этап захвата электронного изображения указанного изображения, маркированного на указанной поверхности;
- этап обработки цвета точек указанного захваченного изображения;
- этап декодирования информации исходя из цвета указанных точек захваченного изображения.
Согласно отличительным признакам изобретения, на этапе захвата электронного изображения источник освещения ориентируют с целью освещения маркированного изображения согласно заранее заданной ориентации. Благодаря упомянутым средствам улучшается чтение кода.
Согласно отличительным признакам изобретения, способ чтения, являющийся объектом настоящего изобретения и подобный кратко изложенному выше, содержит этап чтения маркировки, нанесенной на указанную поверхность; на этапе захвата электронного изображения ориентацию источника освещения по отношению к указанному маркированному изображению определяют исходя из указанной считанной маркировки. Благодаря указанным средствам облегчается автоматическая настройка положения маркированной поверхности относительно источника света.
Согласно отличительным признакам изобретения, способ чтения, подобный изложенному выше, содержит этап определения подлинности маркированного изображения исходя из декодированной информации. Данная информация обеспечивает возможность идентификации за счет своего содержания или за счет ошибок, появляющихся в декодированной информации в ходе декодирования.
Согласно отличительным признакам изобретения, способ чтения, подобный изложенному выше, содержит этап определения подписи, представляющей точки маркированного изображения, и этап сравнения указанной подписи с подписями, сохраненными в памяти.
Четвертым аспектом настоящего изобретения предложено устройство для чтения изображения, маркированного на поверхности, отличающееся тем, что оно содержит:
- средства захвата электронного изображения указанного изображения, маркированного на указанной поверхности;
- средства обработки цвета точек указанного захваченного изображения;
- средства декодирования информации исходя из цвета указанных точек захваченного изображения.
Поскольку преимущества, цели и отличительные признаки данного устройства для маркировки, данного способа чтения и данного устройства для чтения являются сходными с таковыми для способа маркировки, подобного кратко изложенному выше, они здесь повторно не приводятся.
Другие преимущества, цели и отличительные признаки раскрываются в следующем далее описании, выполненном в пояснительных целях, ни в коей мере не являясь ограничением, в соответствии с приложенными чертежами, на которых:
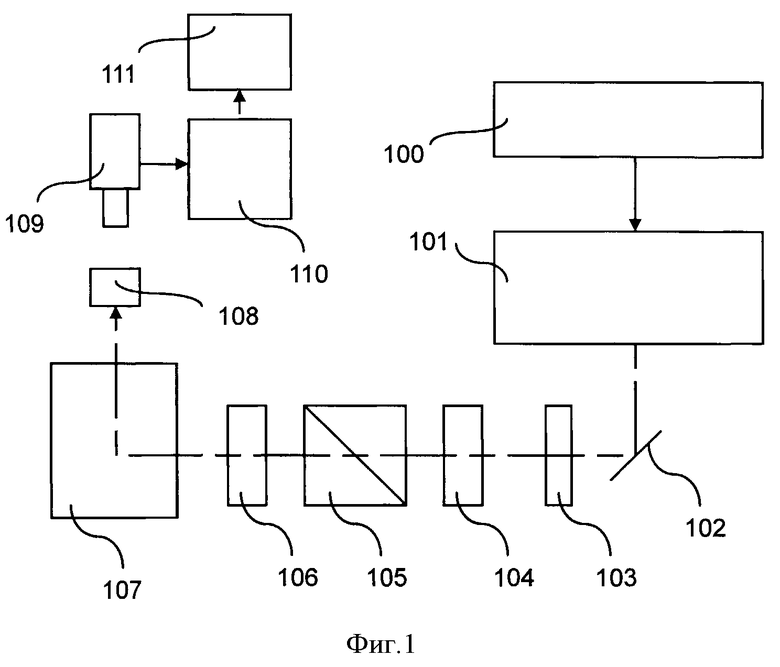
- на фиг.1 схематически представлены конкретный вариант реализации устройства для маркировки, являющегося объектом настоящего изобретения, и условия его работы;
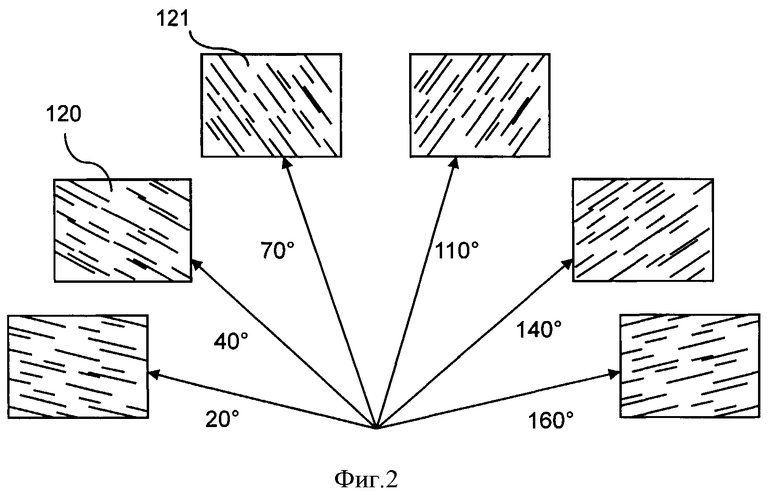
- на фиг.2 показана ориентация наноструктур в зависимости от ориентации поляризации света, причем на фиг.2 ориентация приведена в угловых градусах;
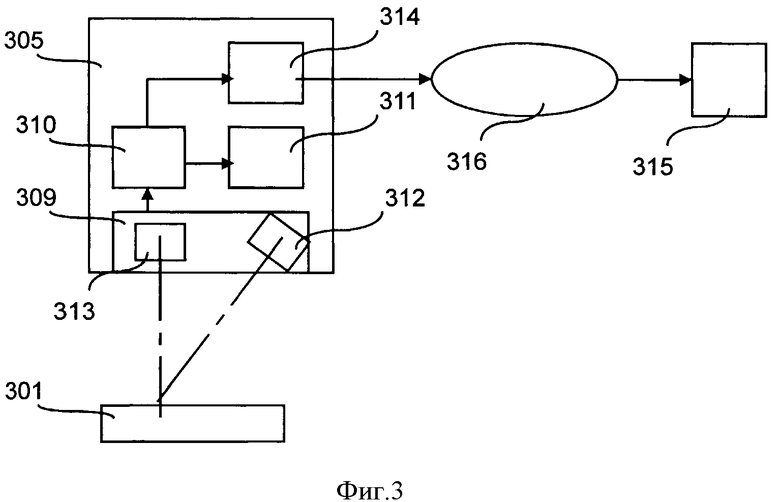
- на фиг.3 схематически показан конкретный вариант реализации устройства для чтения, являющегося объектом настоящего изобретения;
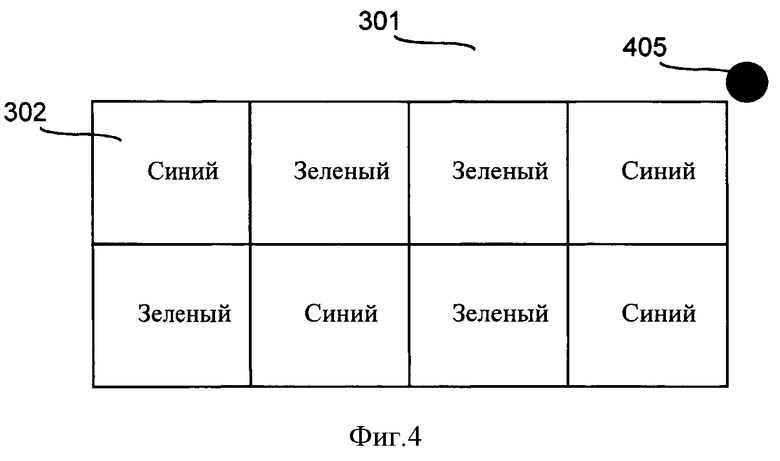
- на фиг.4 схематически показаны цвета, считанные с матрицы участков, в зависимости от ориентации освещения;
- на фиг.5А и 5B в виде блок-схем показаны этапы, используемые в конкретном варианте реализации способа маркировки и способа чтения, являющихся объектами настоящего изобретения;
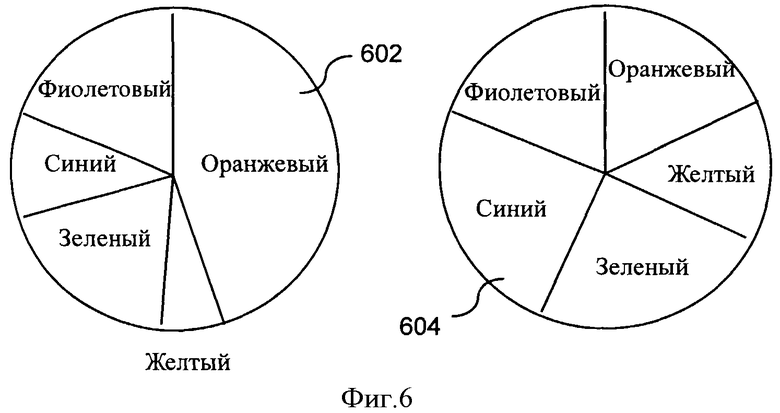
- на фиг.6 показаны два примера распределения цветов, полученных на одних и тех же устройстве для маркировки и устройстве для чтения при различных параметрах маркировки;
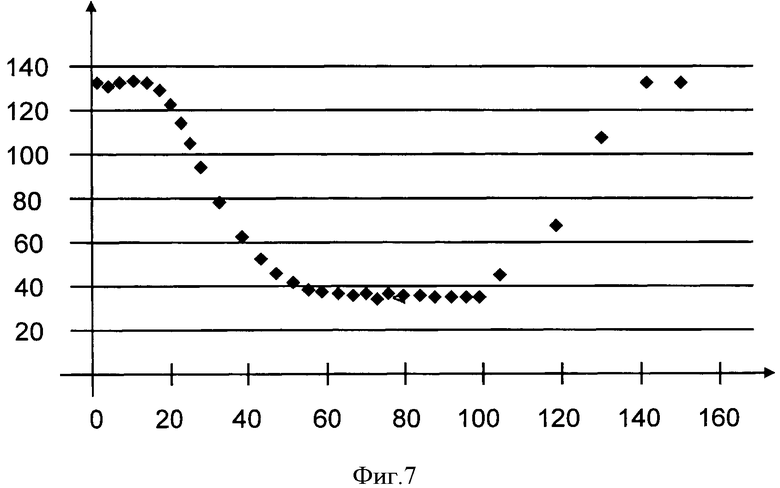
- на фиг.7 показано изменение оттенка цвета, полученного в ходе чтения маркировки, в зависимости от ориентации наноструктур.
На фиг.1 показаны управляющие средства 100, лазер 101, зеркало 102, диафрагма 103, поляризатор 104, разделительный куб 105, поляризатор 106, сканер 107 и маркируемая поверхность 108.
Управляющие средства 100 лазера 101 выполнены с возможностью определения изображения, предназначенного для маркировки на поверхности 108, причем данное изображение образуется из таблицы участков, каждый из которых содержит кодированную информацию. Участки могут иметь одинаковую или различную форму. Далее в настоящем описании и на чертежах предполагается, что все участки таблицы представляют собой квадраты одинаковых размеров. Таким образом таблица, представляемая предназначенным для маркировки изображением образует матрицу участков.
Информация, содержащаяся в каждом из участков, может быть двоичной или иной. Как описывается далее, по меньшей мере одно (в данном случае каждое) значение информации, содержащееся на участке, соответствует особой ориентации поляризации, причем другое значение может соответствовать отсутствию маркировки, отсутствию поляризации или поляризации с иной ориентацией.
В вариантах реализации управляющие средства 100 получают кодированную информацию от компьютерной системы. В других вариантах реализации управляющие средства 100 получает информацию, предназначенную для кодирования в изображении, и вычисляет изображение после кодирования информации.
Например, в ходе кодирования кодированная информация представляет данные, относящиеся к объекту или документу, содержащему маркируемую поверхность. Кодированная информация представляет собой, например, наименование изделия, номер серии и/или партии, дату изготовления, наименование производителя, информацию о правообладателе прав интеллектуальной собственности на изделие, информацию о назначении изделия.
В вариантах реализации значения информации, содержащейся на участках, представляют собой информацию, предназначенную для обеспечения безопасности информации на поверхности, например, зашифрованную информацию.
Каждая точка упомянутого изображения предпочтительно может принимать по меньшей мере три различных значения, которые в ходе маркировки, в свою очередь, соответствуют по меньшей мере трем значениям угла поляризации лазерного пучка.
В вариантах реализации для каждой маркируемой поверхности или каждого маркируемого объекта управляющие средства 100 изменяют изображение так, чтобы каждая маркировка соответствовала уникальному изображению.
Управляющие средства 100 управляют ориентацией поляризации поляризатора 106 в соответствии с разверткой изображения, например, по строкам и, в каждой строке, по столбцам.
В вариантах реализации управляющие средства 100 также управляют фокусировкой лазерного пучка, мощностью лазерного пучка, количеством импульсов и/или углом падения в каждой точке, причем упомянутые параметры подвергаются изменению от одной точки к другой исходя из кодированного изображения.
В вариантах реализации лазер 101 представляет собой лазерный источник, излучающий импульсы длительностью порядка сотен фемтосекунд (100×10-15 секунд), предпочтительно менее указанного значения.
Зеркало 102 в данном случае действует в качестве обычной угловой передачи. Оно служит для повышения компактности устройства, являющегося объектом настоящего изобретения.
Диафрагма 103 расположена в плоскости изображения оптической системы и тем самым определяет размер каждого участка, наносимого одним импульсом.
Поляризатор 104 и разделительный куб 105 совместно образуют делитель мощности, служащий для установления соответствия мощности лазерного пучка маркируемой поверхности 108. Следует отметить, что для реализации функции делителя мощности элементы 104 и 105 могут быть заменены на другие средства деления мощности известных типов.
Поляризатор 106 предназначен для поляризации света, достигающего маркируемой поверхности 108, путем поляризации света, прошедшего через разделительный куб 105, причем угол поляризации зависит от значения сигнала, представляющего изображение, кодирующее информацию, и поступающего от управляющих средств 100. Поляризатор 106 представляет собой, например, поляризатор на основе ферроэлектрических жидких кристаллов или керамике PLZT или статический поляризатор, приводимый во вращение электромотором (не показан).
Сканер 107 предназначен для развертки поверхности 108 синхронно с разверткой изображения, поступающего от управляющих средств 100. Таким путем осуществляется синхронная развертка, с одной стороны, каждой строки изображения, поступающего от управляющих средств 100, и, в свою очередь, параллельных линий на маркируемой поверхности 108. Сканер 107 снабжен, например, зеркалами, установленными на пьезоэлектрической керамике.
Подлежащая маркировке поверхность 108 состоит, например, из металла, кремния, бумаги, пластмасс или картона. Следует отметить, что в общем случае таким способом можно маркировать любой материал, однако используемая мощность должна быть различной. Например, мощность при маркировке металлических материалов больше, чем при маркировке диэлектрических материалов.
На фиг.1 также видны средства 109 захвата изображений, средства 110 обработки изображений и запоминающее средства 111.
Средства 109 захвата изображений содержат источник ориентированного света, описанный далее, и устройство захвата изображений, например, фотоэлектронную камеру или фотоэлектронный аппарат.
Средства 110 обработки изображений предназначены для определения, во-первых, качества маркировки, во-вторых, физических свойств изображения, нанесенного на поверхность 108, исходя из электронного изображения, полученного средствами 109 захвата изображений. Упомянутые физические свойства предпочтительно представляют собой нерегулярные, непредвиденные или случайные явления, подобные, например, положениям ветвления линий.
Средства 110 обработки изображений на основе упомянутых физических свойств определяют подпись изображения. Работа средств 110 обработки изображений подробно показана в соответствии с фиг.5А и 5B.
Фактически, форма наноструктур, получаемых ультракоротким излучением лазера, характеризуется не только периодичностью порядка нескольких сотен нанометров. С применением соответствующих алгоритмов анализа изображений также возможны анализ и получение количественных характеристик более мелких особенностей, или нерегулярностей, в том числе количества ветвлений линий псевдопериодических наноструктур, средней длины линий между двумя ветвлениями, формы фигур ветвления. Из формы наноструктуры в этом случае может быть получена уникальная цифровая подпись результата одного взаимодействия лазера с материалом (подобная отпечатку пальцев человека). Данное характерное свойство заносят в память с целью использования в процедурах идентификации, аутентификации и отслеживания.
В других вариантах реализации подпись представляет физические свойства точек маркированного изображения, соответствующие одному импульсу или последовательности точечных импульсов. Данное физическое свойство представляет собой, например, фокус лазерного пучка, мощность лазерного пучка, количество импульсов, угол падения или угол поляризации. Для определения данного свойства и, как следствие, подписи маркированного изображения применяют, например, данные, полученные при калибровке цветов, описываемые далее (см., в частности, фиг.6). Например, распределение цветов, полученное в ходе рассмотрения изображения, характеризует количество импульсов лазерного пучка, приложенных к соответствующим точкам.
Запоминающие средства 111 предназначены для сохранения подписи изображения и связанной с ней информации, т.е., например, содержания информации, представляемой данным изображением, поступающего от управляющих средств 100.
В первом варианте реализации настоящего изобретения устройство используют для маркировки литьевой формы, причем все детали, формованные с использованием данной литьевой формы, воспроизводят наноструктуру, нанесенную устройством на литьевую форму. Следует отметить, что подобное серийное производство в то же время обеспечивает возможность идентификации отдельных отформованных деталей. Для этого выполняют захват изображения наноструктуры и определяют положения случайных ошибок, возникших при формовании, а затем распределение упомянутых случайных ошибок. Данное распределение затем заносят в память, например, в базу данных с удаленным доступом, например, посредством сети Интернет, совместно с идентификатором детали (например, датой изготовления, номером партии или индивидуальным серийным номером). В ходе дальнейшего распознавания детали, идентификацию которой требуется осуществить, снова проводят захват изображения наноструктуры, определяют положение и распределение ошибок формования и сравнивают упомянутое распределение с распределениями, занесенными в память, с целью идентификации детали по другим данным, занесенным в память вместе с подписью (например, серийному номеру, дате и месту изготовления, номеру партии, получателю, заказу на изготовление). Следует отметить, что подобная функция идентификации совмещена с функцией защиты от копирования, причем любое копирование формованной детали или литьевой формы вызывает появление дополнительных ошибок, обусловленных копированием, которые идентифицируют тем же путем, что и идентичность детали, например, исходя из общего количества ошибок в маркировке.
Во втором варианте применения устройства, являющегося объектом настоящего изобретения, каждый объект или документ является предметом отдельной операции маркировки устройством, причем изображение и получаемая при этом маркировка изменяются от одного объекта к другому или от одной партии к другой вне зависимости от ошибок маркировки.
На фиг.2 видно, что в зависимости от угла поляризации лазерного пучка, показанного стрелками, направленными на изображения наноструктур, ориентация наноструктур изменяется. Например, самые длинные линии наноструктуры 120, выполненной при угле поляризации 40° относительно горизонтали, ориентированы под углом примерно 40°; самые длинные линии наноструктуры 121, выполненной при угле поляризации 70° относительно горизонтали, ориентированы под углом примерно 70°. Однако данные углы измерены относительно двух перпендикулярных прямых. Фактически, линии наноструктуры 121 являются строго перпендикулярными плоскости поляризации света, испущенного лазером.
На фиг.3 показано устройство 305 для чтения информации, содержащее средства 309 захвата изображений, средства 310 обработки изображений и запоминающие средства 311.
Средство 309 захвата изображений содержит ориентированный источник света 312 и устройство 313 захвата изображений, например, фотоэлектронную камеру или фотоэлектронный аппарат.
Средства 310 обработки изображений способны к определению:
- во первых, цвета, соответствующего каждой маркированной точке наблюдаемого маркированного участка 302 (см. фиг.4), с применением известных технологий распознавания маркированного участка и распознавания цвета,
- во-вторых, физических свойств изображения, маркированного на поверхности 301, исходя из электронного изображения, предоставляемого средствами 309 захвата изображений. Исходя их упомянутых физических свойств, средства 310 обработки изображений определяют подпись изображения, сходную с подписью, использованной при маркировке рассматриваемой поверхности, что подробно описано при описании фиг.5А и 5B.
Затем средства 310 обработки изображений передают упомянутую подпись на удаленный сервер 315 посредством сетевого интерфейса 314 и телекоммуникационной сети 316, например, телефонной сети или сети Интернет. Удаленный сервер 315 осуществляет сравнение данной подписи с содержимым базы данных подписей. Удаленный сервер 315 возвращает идентификатор объекта (например, дату изготовления, номер партии или индивидуальный серийный номер).
В это же время средства 310 обработки изображений с учетом коэффициента ошибок маркировки определяют, является ли объект оригиналом или копией, причем копия обладает коэффициентом ошибок, превышающим предельное значение (последнее может храниться в памяти в сочетании с подписью маркировки или воспроизводится по кодированной информации, содержащейся в нанесенной маркировке).
Необходимо отметить, что термин "ошибки" может применяться к любому из физических свойств, использованных для определения подписи или при чтении кодированной информации из считанной маркировки. В первом случае измеряют расхождение между считанной подписью и подписью, занесенной в память в ходе маркировки. Во втором случае используют избыточность кодированной информации и для восстановления кодированной информации измеряют количество избыточной информации или коэффициент избыточности информации. Например, один из видов избыточной информации известен под названием "CRC" (check redundancy code, избыточный контрольный код). В обоих случаях для проведения различий между маркировками, рассматриваемыми как подлинные и содержащими меньше ошибок, и маркировками, рассматриваемыми как копии, применяют предельное, или пороговое значение.
Как видно из фиг.4, при правильной ориентации освещения наноструктуры отражают синий и зеленый цвета. Если присвоить, например, синему цвету двоичное значение "1", a зеленому цвету - двоичное значение "0", то изображению, показанному на фиг.4, соответствует байт 10010101. Наблюдаемый цвет зависит от угла наблюдения и угла освещения. Поэтому исследование наблюдаемых цветов требует применения колориметрического анализа. Возможно использование двух различных подходов:
- на маркировку или в непосредственной близости от нее наносят фиксированную контрольную точку 405, обеспечивающую возможность ориентации чтения и, в частности, угла падения света, освещающего маркировку;
- осуществляют точное и инвариантное определение колориметрического расстояния между двумя маркировками.
Как видно из фиг.5А и 5B, в одном из вариантов реализации реализация настоящего изобретения использование изобретения при помощи устройств, показанных на фиг.1-3, вначале включает этап 500 определения матрицы участков для каждого подлежащего маркировке объекта или документа, причем каждый участок матрицы соответствует значению, например, двоичному, представляющему кодированную и, возможно, зашифрованную информацию. Кодированная информация, представленная значениями, соответствующими участкам матрицы, представляет собой, например, идентификатор объекта, дату изготовления, номер партии или индивидуальный серийный номер.
В некоторых вариантах реализации на этапе 500 при кодировании информации в форме изображения, содержащего значения, представляющие кодированную информацию, каждая точка упомянутого изображения может принимать по меньшей мере три различных значения.
Затем на этапе 502 осуществляют регулирование, возможно автоматическое, степени открытия диафрагмы 103, находящейся в плоскости изображения оптической системы, с целью определения размеров участка, маркируемого во время импульса. Данные размеры указывают, например, в спецификации, хранимой в памяти для каждой партии объектов или документов, подлежащих маркировке.
Затем на этапе 504 задают ослабление мощности светового потока путем задания угла поляризации поляризатора 104, расположенного перед разделительным кубом 105 по ходу светового потока. Подобное ослабление может задаваться автоматически, например, с учетом спецификации, хранимой в памяти и соответствующей партии документов или объектов, или согласно датчикам (не показаны) цвета и материала документов или объектов, подлежащих маркировке.
На этапе 506 производят позиционирование сканера 107 так, чтобы первый участок изображения, формируемого на объекте или документе, подлежащем маркировке, находился на оптическом пути лазерного пучка.
На этапе 508 осуществляют определение численного значения, представляемого на рассматриваемом участке, путем чтения данного значения из памяти. На этапе 509 угол поляризации поляризатора 106 поворачивают так, чтобы данный угол представлял подлежащее представлению численное значение.
На этапе 510 осуществляют по меньшей мере один импульс путем испускания лазерного пучка длительностью порядка фемтосекунды, при этом на рассматриваемом участке объекта или документа, подлежащего маркировке, формируются наноструктуры.
Предпочтительно для каждой маркируемой точки осуществляют один импульс. Предпочтительно, несмотря на перекрывание точек, по меньшей мере половина поверхности маркируемого участка подвергается действию только одного лазерного импульса.
В случае, когда каждая точка маркируемого изображения может принимать по меньшей мере три различных значения, на этапе 510 маркировки осуществляют изменение поляризации лазерного пучка по меньшей мере в трех направлениях, причем каждое направление поляризации соответствует одному из значений точек упомянутого изображения.
На этапе 512 осуществляют проверку того, обработан ли последний участок формируемого изображения. Если результат проверки оказывается отрицательным, на этапе 514 осуществляют переход к следующему маркируемому участку, и для данного участка происходит возврат к этапу 506.
Таким образом, осуществляют развертку поверхности 108 синхронно с разверткой изображения, осуществляемой управляющими средствами 100.
Если результат проверки на этапе 512 оказывается положительным, на этапе 515 осуществляют нанесение ориентационной маркировки 405 на поверхность, предназначенную для маркировки. Данная ориентационная маркировка представляет собой ориентацию источника света, обеспечивающую возможность чтения кодированной информации.
Затем на этапе 516 маркируемый объект или документ перемещают с целью его позиционирования напротив средств 109 захвата изображений и источника света, ориентированного так, чтобы вследствие дифракции на различных участках изображения оказывались видны различные цвета. На этапе 518 производят захват изображения маркированного участка объекта или документа и занесение его в память. На этапе 520 определяют, является ли качество маркировки удовлетворительным, путем сравнения цветов с нормализованными цветами и поверхностей участков изображения с типовыми поверхностями.
Если качество ниже заранее заданного уровня, на этапе 521 объект или документ удаляют из производственной цепи или печатной линии.
В противном случае на этапе 522 осуществляют определение физических свойств изображения, маркированного на поверхности 108, с учетом электронного изображения, предоставляемого средствами 109 захвата изображений. Например, определяют положение пересечений или ветвлений линий наноструктуры, как правило, являющихся параллельными.
На этапе 524 исходя из упомянутых физических свойств определяют подпись изображения.
На этапе 526 осуществляют занесение в память, например, в удаленную память, во-первых, подписи изображения, во-вторых, связанной с ней информации, т.е., например, содержания информации, представленной данным изображением, предоставляемого управляющими средствами 100. Информация, занесенная в память совместно с подписью изображения, представляет собой, например, идентификатор объекта, дату изготовления, номер партии или индивидуальный серийный номер.
Следует отметить, что память, в которую заносят подписи и связанную с ними информацию, может представлять собой базу данных с удаленным доступом, например, посредством сети Интернет.
Следует также отметить, что в варианте реализации, в котором осуществляют маркировку литьевой формы, подпись определяют и заносят в память как для литьевой формы, так и для каждого объекта, отформованного при помощи данной литьевой формы.
В ходе дальнейшего распознавания объекта или документа, аутентификацию которого требуется осуществить, на этапе 544 осуществляют первый захват изображения. Затем на этапе 546 выявляют ориентационную маркировку 405. На этапе 548 осуществляют ориентирование источника света с целью приведения его ориентации в соответствие с ориентацией, идентифицированной по маркировке 405. Следует отметить, что на этапе 548 возможны перемещение маркированной поверхности, перемещение источника света или выбор источника света, соответствующего нужной ориентации, среди множества неподвижных источников света.
Затем на этапе 550 осуществляют захват и занесение в память изображения наноструктуры при помощи средств 109 захвата изображений и источника света, ориентированного так, чтобы на различных участках изображения вследствие дифракции проявлялись различные цвета.
На этапе 552 осуществляют идентификацию цветов различных маркированных участков изображения и связывают их с численными значениями сообщения. В этом случае сообщение показывают, передают удаленно и/или передают компьютерной программе. На этапе 554 определяют количество ошибок в сообщении, например, путем определения количества избыточностей, потраченного на исправление упомянутых ошибок, или путем сравнения с восстановленным исходным изображением. Затем на этапе 556 определяют, является ли объект оригиналом или копией, путем сравнения количества ошибок с заранее определенным предельным значением.
Для идентификации объекта или документа на этапе 558 определяют случайные физические свойства изображения, маркированного на поверхности 108, исходя из электронного изображения, предоставляемого средствами 109 захвата изображений. При этом определяют, например, положение пересечений линий наноструктуры, как правило, являющихся параллельными, или положение и распределение ошибок. На этапе 560 исходя из упомянутых физических свойств определяют подпись изображения.
На этапе 562 упомянутую подпись предоставляют удаленной памяти, которая возвращает, во-первых, информацию о признании данной подписи, причем отсутствие опознавания может означать, что объект или документ является копией или подделкой, и, во-вторых, в случае опознавания - информацию, связанную с подписью в удаленной памяти. Так, например, положение и распределение характерных элементов или ошибок формования сравнивают с упомянутыми величинами, занесенными в память, с целью идентификации объекта или документа по другим занесенным в память данным. Следует отметить, что данная функция идентификации осуществляется совместно с функцией защиты от копирования, причем всякое копирование отформованной детали или литьевой формы вызывает появление дополнительных ошибок, обусловленных копированием, которые контролируются тем же путем, что и идентичность детали, например, исходя из общего количества ошибок в маркировке.
Связанная информация показывается и/или передается программе, служащей для статистической обработки и/или отслеживания.
Следует отметить, что в одном из вариантов реализации осуществляют повторное чтение маркированной информации с применением ориентации наноструктур. Микроструктуры пригодны для прямого детектирования микроскопическим способом при помощи соответствующего оптического устройства. В таком случае для определения средней ориентации каждой из наноструктур, связанных с одним из участков изображения, используют алгоритм анализа изображений.
Таким образом, в соответствии с одним из аспектов настоящего изобретения, осуществляют ультракороткое облучение металлической поверхности с целью получения различных типов наноструктур, или "волн", ориентация которых служит для кодирования информации. Для контроля ориентации наноструктур осуществляют управление поляризационной пластиной, связанной с лазером.
Для восстановления кодированной информации используют колориметрическое изменение, вызываемое различием в ориентации наноструктур при воздействии света, ориентация которого заранее задана.
Далее в описании рассматривается система получения изображений, построенная на основе планшетного сканера. Возможно применение планшетного сканера в качестве непрямого средства визуализации наноструктур в макроскопическом масштабе. Данная система получения изображений имеет отличительную особенность, состоящую в том, что она позволяет установить соответствие определенного цвета с ориентацией наноструктур. Свет, испускаемый сканером, представляет собой белый цвет, содержащий все длины волн. Белый свет освещает наноструктуры, обладающие определенной ориентацией, или определенным углом падения, по отношению к оси освещения. Если проинтегрировать данные ориентации в соответствии с классической формулой дифракции на решетках, получим следующую формулу:
m.λ=d.(sinα×cosθ+sinβ),
где λ - длина волны,
α - угол падения света,
θ - угол между наноструктурами и направлением освещения, а
β - угол отражения светового пучка к устройству захвата изображений.
Допустим, что сканер имеет следующую конфигурацию: фиксированный угол падения света сканера α=10° и фиксированный угол отражения пучка к CCD-устройству захвата сканера β=56°. Тогда можно вычислить значение длины волны, принимаемой устройством захвата, в зависимости от ориентации наноструктур в сканере.
Данные значения принимаемых длин волн лежат в интервале от 450 нм (синий) до 570 нм (оранжевый) и соответствуют цветам, присутствующим в изображениях, получаемых данной системой сбора данных.
Колориметрический эффект, наблюдаемый в ходе получения изображений, является следствием дифракции света системы сбора данных на наноструктурах маркировки. Дифракция света на подобных решетках изменяется с учетом их качеств и морфологии и зависит от различных использованных параметров лазерной маркировки.
Так, изменение различных параметров лазера обеспечивает возможность получения различных типов наноструктур с различной конфигурацией (размером, шагом, геометрической формой, регулярностью и др.). Подобные различные типы наноструктур образуют такое же количество различных решеток, в свою очередь порождающих различные дифракционные явления. Поэтому с применением одного и того же лазера и при одинаковых условиях получения изображений возможно получение различных цветовых спектров. Для обеспечения возможности применения результатов необходима точная калибровка системы чтения/маркировки. На фиг.6 показаны два различных примера калибровки, полученных на одном и том же устройстве для калибровки/чтения при различных параметрах лазера.
Слева на круговой диаграмме 602 показаны оттенки, полученные световым пучком ("пятном") диаметром 45 мкм, мощностью 25 мВт, при перекрывании 15 мкм и трех проходах. Справа на круговой диаграмме 604 показаны оттенки, полученные световым пучком диаметром 20 мкм, мощностью 5 мВт, без перекрывания и при 25 проходах. Можно видеть, что распределение цветов является более равномерным во втором случае, показанном справа, чем в первом.
Далее изложен расчет колориметрического разрешения. Данное разрешение является полезным для определения количества цветов, которое можно наблюдать при помощи данного устройства, и точности различения двух цветов, т.е. проведения различий между ними. Для обеспечения возможности точного анализа вводится определение расстояния между цветами. Авторами настоящего изобретения установлено, что расстояние, вычисленное в соответствующем колориметрическом пространстве, например, HSV (hue, saturation, value - оттенок, насыщение, значение), позволяет заключить, что яркость и насыщение цветов, полученных при таком способе получения изображений, изменяются очень мало, в противоположность оттенку.
Предпочтительно в ходе чтения информации на выходе из сканера происходит колориметрическое преобразование представления точки изображения, выраженного в единицах RGB (red, green, blue - красный, зеленый, синий), в представление в единицах HSV.
На фиг.7 представлена совокупность цветов, наблюдаемых для каждой ориентации наноструктур образца при получении изображения планшетным сканером в колориметрической системе отсчета HSV. Данная кривая 700, образованная совокупностью дискретных точек, показывает изменение оттенка цвета, полученное в ходе получения изображения планшетным сканером, в зависимости от ориентации наноструктур по отношению к упомянутому сканеру.
После вычисления оттенка, наблюдаемого для каждой ориентации наноструктур, маркированных на образце, с целью определения количества наблюдаемых и различимых цветов и уровня их разрешения строится возрастающая иерархическая классификация.
Целью построения возрастающей иерархической классификации является классификация объектов, имеющих сходное поведение на всей совокупности переменных. Принципом является создание разбиения ("дендрограммы") путем попарного объединения ближайших объектов или ближайших групп объектов. Алгоритм построения приводит к иерархическому разбиению, содержащему историю классификации.
В то же время подобный подход требует применения метрики, приспособленной к применению для классифицируемых объектов (евклидово расстояние, стандартное отклонение и др.). В примере, описанном в приведенной ниже таблице, было выбрано евклидово расстояние. Трудность подобной классификации заключается в выборе способа пересчета расстояний после объединения (простая связь - объединение двух групп, обладающих наименьшим расстоянием между ближайшими соседями, полная связь - объединение двух групп, обладающих наименьшим расстоянием между наиболее удаленными соседями, средняя групповая связь - объединение двух групп, обладающих наименьшим средним расстоянием между соседями, расстояние между центроидами: объединение двух групп, обладающих наименьшим расстоянием между своими барицентрами).
С учетом специфики изучаемых объектов (ориентации наноструктур, соответствующей оттенку, который не может быть усреднен) была использована связь между центроидами, вычисленными из 25 оттенков, полученных при 25 различных ориентациях наноструктур, изменяющихся шагом 4° в интервале от 0° до 100°.
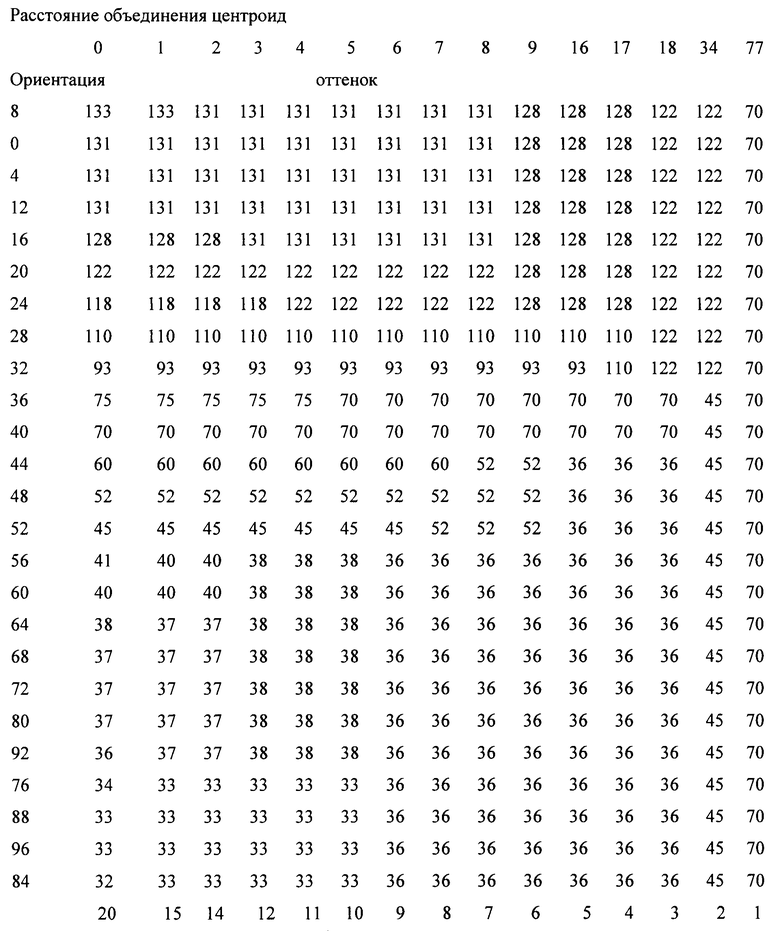
В последней строке данной таблицы приведено количество различимых классов для каждого столбца.
Рассмотрение данной дендрограммы позволяет утверждать, что максимальное количество классов различных ориентации наноструктур, выделенных по соответствующему им оттенку, полученному при помощи системы получения изображений, использованной для построения данной дендрограммы, составляет двадцать. При повышении расстояния слияния количество распознаваемых классов уменьшается.
В соответствии с количеством классов, которое требуется применить, достаточно вновь использовать приведенную выше дендрограмму и выбрать соответствующие ориентации наноструктур.
Данная система обеспечивает возможность определения совокупности классов, делающей максимальной различие их оттенков по отношению друг к другу.
Пример применения настоящего изобретения заключается в воспроизведении графических объектов на металлической поверхности с применением изложенного принципа соответствия ориентации наноструктур цвету. Следует отметить, что в каждой точке изображения могут накладываться друг на друга нескольких наноструктур.
Для осуществления этого характеризуют количество цветов, преобладающих в воспроизводимом объекте. Затем в соответствии с данным количеством для сопоставления всех цветов этого объекта ближайшему предложенному классу цветов используют приведенную выше дендрограмму.
После определения необходимого количества классов каждый пиксель исходного изображения распределяют в один из предложенных классов оттенков. Данную операцию проводят, например, в колориметрической системе RGB. Вычисляют расстояние между каждым пикселем исходного изображения и каждым доступным классом цветов и ставят цвет пикселя таблицы в соответствие ближайшему цвету класса оттенков. Таким образом, осуществляют автоматическое снижение количества цветов изображения до количества классов цветов, доступных для маркировки и визуализации сканером.
После выполнения данной операции создаются цветовые плоскости, соответствующие ориентациям наноструктур, подлежащих маркировке. Данные плоскости соответствуют тому, что должно быть маркировано лазером на каждом образце металла с целью получения каждой из ориентации наноструктур, соответствующих ожидаемому цвету.
На макроскопическом уровне чтение информации определяет ориентацию наноструктур вследствие правильно управляемому явлению дифракции. Поэтому посредством использования настоящего изобретения используется колориметрическое изменение для добавления информации на новое направление считывания заданного кода. Например, к Datamatrix (зарегистрированная торговая марка) размером 4 мм добавляют наноструктуры, имеющие три различные ориентации, и их чтение осуществляют с применением трех различных цветов, предоставляемых устройством захвата изображений, например, планшетным сканером.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ маркировки поверхности контролируемыми периодическими структурами | 2018 |
|
RU2696804C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДОКУМЕНТОВ | 2007 |
|
RU2477522C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДОКУМЕНТОВ | 2012 |
|
RU2628119C2 |
| МАРКИРОВКА СМЕННЫХ БЛОКОВ РЕСУРСА В УСТРОЙСТВАХ ПЕЧАТИ | 2005 |
|
RU2390422C2 |
| СПОСОБ МАРКИРОВКИ ОБЪЕКТА С ЦЕЛЬЮ ЕГО ИДЕНТИФИКАЦИИ | 2011 |
|
RU2462338C1 |
| Способ скрытого малоинвазивного маркирования объекта с целью его идентификации | 2016 |
|
RU2644121C2 |
| ВЕРИФИЦИРУЕМАЯ СИМВОЛЬНАЯ МЕТКА ПРЯМОГО НАНЕСЕНИЯ И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2010 |
|
RU2445700C1 |
| МАШИНОСЧИТЫВАЕМАЯ МАРКИРОВКА ПРЯМОГО НАНЕСЕНИЯ С МИКРОРЕЛЬЕФОМ | 2017 |
|
RU2665867C1 |
| СПОСОБ МАРКИРОВКИ ПРОДУКЦИИ ИЛИ ИЗДЕЛИЙ ДЛЯ ИХ ИДЕНТИФИКАЦИИ И ЗАЩИТЫ ОТ ПОДДЕЛКИ | 2013 |
|
RU2534952C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИДЕНТИФИКАЦИОННОЙ МЕТКИ ДЛЯ МАРКИРОВКИ ЦЕННЫХ ИЗДЕЛИЙ И ЦЕННОЕ ИЗДЕЛИЕ С ЕЕ ИСПОЛЬЗОВАНИЕМ | 2009 |
|
RU2427041C2 |
Изобретение относится к способу и устройству маркировки поверхности и может найти применение для маркировки объекта или документа для его идентификации, отслеживания и аутентификации. Осуществляют этап (500) кодирования информации в виде изображения, содержащего значения, представляющие кодированную информацию, и этап (506-514) точечной маркировки участка указанной поверхности с применением поляризованного лазерного пучка для формирования ориентированных наноструктур на указанной поверхности или в ней. Поляризацию лазерного пучка в каждой точке маркировки модулируют исходя из значения точки указанного изображения. В некоторых вариантах реализации на этапе маркировки применяют импульсный лазер с длительностью импульса менее 10×10-12 секунд и средства поляризации света, исходящего от указанного лазерного источника и достигающего указанной поверхности, выполненные с возможностью поляризации света согласно оси поляризации, которая может меняться в зависимости от сигнала, полученного указанными средствами поляризации. В результате обеспечивается возможность наносить информацию помимо штриховых символов и ускоряется процесс маркировки. 2 н. и 12 з.п. ф-лы, 7 ил., 1 табл.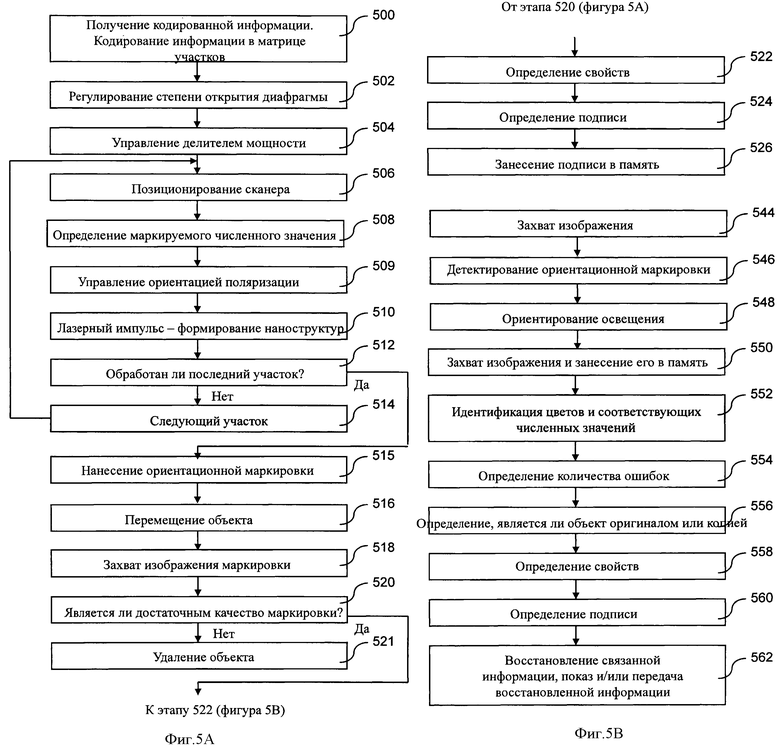
1. Способ маркировки поверхности, содержащий
- этап (500) кодирования информации в виде изображения, содержащего значения, представляющие кодированную информацию;
- этап (506-514) точечной маркировки участка указанной поверхности поляризованным лазерным пучком для формирования ориентированных наноструктур на этой поверхности или в ней посредством модулирования поляризации лазерного пучка для каждой точки маркировки в соответствии с указанным значением точки изображения и маркировки контрольного участка, представляющего ориентацию, используемую на этапе чтения указанной маркировки.
2. Способ по п.1, отличающийся тем, что он содержит этап (524) определения подписи, представляющей физические свойства точек маркированного изображения, и этап (526) сохранения указанной подписи.
3. Способ по п.1, отличающийся тем, что на этапе (506-514) маркировки по меньшей мере половина поверхности маркируемого участка подвергается действию только одного лазерного импульса.
4. Способ по п.1, отличающийся тем, что на этапе (500) кодирования информации в виде изображения, содержащего значения, представляющие кодированную информацию, каждая точка указанного изображения может принимать по меньшей мере три различных значения, и на этапе маркировки поляризацию лазерного пучка модулируют согласно по меньшей мере трем направлениям, причем каждое направление поляризации соответствует одному из значений точек указанного изображения.
5. Способ по п.1, отличающийся тем, что на этапе (506-514) маркировки применяют импульсный лазер (101) на протяжении менее 10·10-12 с.
6. Способ по п.1, отличающийся тем, что он содержит этап (518) чтения указанного маркированного изображения на указанной поверхности и этап (520) проверки качества в соответствии со считанным изображением.
7. Способ по п.1, отличающийся тем, что на этапе (506-514) маркировки применяют лазерный пучок размером менее 25 мкм.
8. Способ по п.1, отличающийся тем, что на этапе (506-514) маркировки выполняют точки (302), отстоящие друг от друга менее чем на 10 мкм.
9. Способ по п.1, отличающийся тем, что на этапе (506-514) маркировки применяют лазерный пучок, излучающий свет, длина волны которого близка к 800 нм.
10. Способ по п.1, отличающийся тем, что на этапе (500) кодирования указанное изображение изменяют для каждого из осуществляемых этапов маркировки.
11. Способ по любому из пп.1-11, отличающийся тем, что на этапе (500) кодирования указанная информация представляет собой данные, относящиеся к объекту или документу (108), содержащему указанную поверхность (301).
12. Устройство (100-107) для маркировки поверхности, содержащее средства (100) кодирования информации в виде изображения и средства (101-107) маркировки указанной поверхности поляризованным лазерным пучком для формирования ориентированных наноструктур на указанной поверхности или в ней посредством модулирования поляризации лазерного пучка в соответствии с каждой точкой указанного изображения, предназначенного для формирования на указанной поверхности и маркировки контрольного участка, представляющего ориентацию, используемую на этапе чтения указанной маркировки.
13. Устройство по п.12, отличающееся тем, что оно содержит средства определения подписи, представляющей физические свойства точек маркированного изображения и средства сохранения указанной подписи.
14. Устройство по п.12, отличающееся тем, что средства кодирования информации в виде изображения, содержащего значения, представляющие кодированную информацию, выполнены с возможностью кодирования информации в виде трех различных значений, причем средства маркировки выполнены с возможностью модулирования поляризации лазерного пучка согласно по меньшей мере трем направлениям, каждое из которых соответствует одному из значений точек указанного изображения.
| JP 2005270992 A, 06.10.2005 | |||
| СПОСОБ МАРКИРОВКИ БРИЛЛИАНТОВ | 1996 |
|
RU2161093C2 |
| СПОСОБ НАНЕСЕНИЯ НА ПРЕДМЕТ ПОДПОВЕРХНОСТНОЙ МАРКИРОВКИ | 1994 |
|
RU2124988C1 |
| WO 2007012215 A1, 01.02.2007 | |||
| Приспособление к всасывающим трубам водяных турбин с целью понижения потери энергии на изгибе и выравнивания движения жидкости | 1929 |
|
SU26986A1 |

