Изобретение относится к области систем мониторинга смещения инженерных сооружений и может быть использовано для ведения непрерывного контроля смещений и колебаний элементов конструкций мостов, плотин, башен и других инженерных сооружений с целью ранней диагностики целостности сооружения, а также оперативного обнаружения потери устойчивости сооружения.
Из уровня техники известна структурированная система мониторинга и управления инженерными системами зданий и сооружений (см. патент Российской Федерации на полезную модель RU 82048, опубл. 10.04.2009), содержащая центральный вычислительный модуль с компьютерной серверной станцией, который подключен к блоку инженерных систем. Система выполняет следующие функции: сбор параметров работы инженерных систем, формирование базы данных текущих параметров инженерных систем, определение трендов параметров работы инженерных систем и формирование базы данных трендов параметров, экстраполирование трендовых значений параметров работы инженерных систем на постоянный временной интервал, моделирование работы инженерных систем и определение расчетных значений параметров и их предельно допустимых значений, формирование базы данных расчетных параметров и их предельно допустимых значений, сравнение текущих параметров работы системы с расчетными параметрами и их предельно допустимыми значениями, сравнение экстраполированных значений и значений текущих параметров работы с расчетными параметрами и их предельно допустимыми значениями, определение возможных последствий, оценки ущерба и рекомендаций по реагированию по результатам компьютерного моделирования в случае превышения абсолютных значений текущих параметров и/или экстраполированных на постоянный временной интервал значений текущих параметров работы инженерных систем соответствующих значений расчетных параметров работы инженерных систем на величины, превышающие пороговые значения, фиксации состояния работы инженерных систем и/или прогнозируемое состояние работы инженерных систем и оценку возможных последствий, вызванных возникновением внештатной ситуации, и рекомендаций по реагированию на внештатные ситуации, а также формирования управленческих команд инженерной системе в автоматическом и/или полуавтоматическом режиме с участием оператора.
Из уровня техники известен способ мониторинга технического состояния здания и сооружения (объекта) (см. заявка на изобретение Российской Федерации RU 2008106992, опубл. 10.09.2010), который включает возбуждение колебаний объекта на собственных частотах, регистрацию вибраций, и/или ускорений колебаний, и/или скоростей колебаний, и/или амплитуд колебаний, и/или наклонов, и/или прогибов, и/или напряжений, и/или нагрузок, и/или измерения абсолютной и неравномерной осадки, и/или геодезических параметров, и/или контроль трещин, стыков, швов, отличающийся тем, что осуществляют фильтрацию параметров технического состояния зданий и сооружений на две группы параметров: группу параметров технического состояния нижней части объекта и группу параметров технического состояния верхней части объекта, определяют с использованием параметров технического состояния нижней части объекта путем математического (компьютерного) моделирования объекта расчетные параметры строительных конструкций верхней части объекта, сравнивают расчетные параметры строительных конструкций верхней части объекта с аналогичными параметрами строительных конструкций верхней части объекта, определенных по результатам натурных измерений от датчиков для мониторинга технического состояния верхней части объекта, корректируют параметры математической модели объекта при условии, что расчетные параметры строительных конструкций верхней части объекта, определенные по результатам математического моделирования, отличаются от аналогичных параметров строительных конструкций верхней части объекта, определенных по результатам натурных измерений на величину больше заданного порога, определяют по измеренным параметрам технического состояния нижней части объекта тренды параметров технического состояния нижней части объекта, экстраполируют трендовые значения параметров технического состояния нижней части объекта на заданный временной интервал, определяют на основе данных экстраполяции параметров технического состояния нижней части объекта прогнозные расчетные параметры технического состояния строительных конструкций верхней части объекта, фиксируют для потребителя прогнозную оценку будущего технического состояния объекта на основе сравнительного анализа прогнозных расчетных параметров технического состояния строительных конструкций верхней части объекта с предельно допустимыми значениями.
Из уровня техники известны способ и устройство для относительного спутникового позиционирования движущихся платформ (см. патент США на изобретение US 6961018, опубл. 01.11.2005). Изобретение направлено на определение относительного положения движущихся платформ с использованием спутниковых навигационных технологий и оборудования, установленного на платформах. Оно основано на принципах космической навигации - дифференциальных системах и использует дифференциальную ГНСС в режимах, приводящих к минимуму передачи данных и расчетных нагрузок на вспомогательные процессоры. Изобретение обеспечивает точное позиционирование и относительную навигацию.
Из уровня техники известны способ и устройство для наземной съемки участков с одной или более неустойчивой зоной (см. патент США на изобретение US 7199872, опубл. 03.04.2007). Изобретение относится к области наземной съемки (мониторинга) участка с одной или более неустойчивыми зонами и хотя бы одной контрольной точкой, размещенной за пределами зон нестабильности, где контроль смещений осуществляется по относительным показаниям датчиков, размещенных в различных точках участка.
Из уровня техники известна измерительная сейсмическая система с использованием GPS-приемников (см. патент США на изобретение US 7117094, опубл. 15.07.2004). Система мониторинга трехмерных сейсмических данных, включающая множество цифровых датчиков, центра управления и обработки данных, базовая GPS-станция с антенной, расположенная в максимально открытой в верхней полуплоскости полусферой, и роверными GPS-приемниками, использующими сигналы базовой станции для определения своего местоположения с высокой точностью.
Из уровня техники известен метод и система GPS и WAAS фазовых измерений для относительного позиционирования (см. патент США на изобретение US 6469663, опубл. 24.10.2000). Метод точного определения относительного положения между двумя точками с помощью информации о фазах несущих из приемников, способных производить кодовые и фазовые измерения сигналов, передаваемых со спутников GPS, а также сигналов, передаваемых с WAAS, EGNOS, MSAS или других широкозонных дифференциальных систем спутников (далее именуемые просто как «спутники WAAS»). Эти сигналы обрабатываются в приемных системах для определения относительной позиции, для съемки или иных приложений. Обработка сигналов ведется аналогично той, которая используется в существующих GPS-фазовых приемниках. Метод отличается более быстрым и надежным разрешением неоднозначности фазовых измерений, защитой от пропуска фазовых циклов и потери части спутников, а также возможностью расширения рабочего диапазона, позволяя увеличить базу между приемниками путем включения ионосферной модели, представленной WAAS.
Известные из уровня техники технические решения обладают следующими недостатками:
- недостаточная точность измерения смещений инженерных сооружений.
Техническим результатом заявленного изобретения является повышение точности расчета характеристик смещений инженерных сооружений и непрерывный контроль параметров смещений инженерных сооружений.
Технический результат достигается тем, что система высокоточного мониторинга инженерных сооружений содержит измерительный модуль, включающий навигационную антенну ГЛОНАСС/GPS, навигационный приемник ГЛОНАСС/GPS, контроллер с энергонезависимой памятью, приемопередающий модуль связи, аккумуляторную батарею, устройство зарядки аккумуляторной батареи, датчиковую аппаратуру измерительного модуля; внешнюю датчиковую аппаратуру, автоматизированное рабочее место оператора на базе ПЭВМ с процессором, при этом устройство зарядки аккумуляторной батареи соединено с аккумуляторной батареей, которая соединена с контроллером с энергонезависимой памятью, выход навигационной антенны ГЛОНАСС/GPS подключен к входу навигационного приемника ГЛОНАСС/GPS, вход-выход навигационного приемника соединен с первым входом-выходом контроллера с энергонезависимой памятью, второй вход-выход которого соединен с первым входом-выходом приемопередающего модуля связи, второй вход-выход которого служит для обмена данными с автоматизированным рабочим местом оператора на базе ПЭВМ с процессором через средства связи по протоколу TCP/IP, выход датчиковой аппаратуры измерительного модуля соединен с входом контроллера с энергонезависимой памятью, выход внешней датчиковой аппаратуры соединен с автоматизированным рабочим местом оператора на базе ПЭВМ с процессором через средства связи по протоколу TCP/IP, при этом автоматизированное рабочее место оператора на базе ПЭВМ с процессором имеет выход для передачи информации во внешние системы (диспетчерские центры).
Процессор ПЭВМ автоматизированного рабочего места оператора выполнен с возможностью:
- слежения за смещениями элементов конструкций инженерных сооружений по трем пространственным координатам;
- сбора данных с измерительных модулей;
- анализа полученных данных и определение смещений контролируемых точек;
- определения спектральных характеристик смещений (резонансных частот конструкции);
- формирования сигналов тревоги в случае выхода смещений контролируемых параметров за пределы установленных границ;
- отображения результатов обработки информации в удобном для оператора виде;
- документирования и хранения полученных данных.
Признаки и сущность настоящего изобретения поясняются в последующем детальном описании, поясняемом чертежами, где показано следующее.
Фиг.1 - Структурная схема системы высокоточного мониторинга смещений инженерных сооружений, где:
11…1L - измерительные модули;
2 - контроллер с энергонезависимой памятью;
3 - навигационный приемник ГЛОНАСС/GPS;
4 - навигационная антенна ГЛОНАСС/GPS;
5 - приемопередающий модуль связи;
6 - аккумуляторная батарея;
7 - устройство зарядки аккумуляторной батареи;
81…8M - датчиковая аппаратура измерительного модуля;
91…9N - внешняя датчиковая аппаратура;
10 - средства связи;
11 - автоматизированное рабочее место оператора на базе ПЭВМ с процессором;
12 - внешние потребители информации.
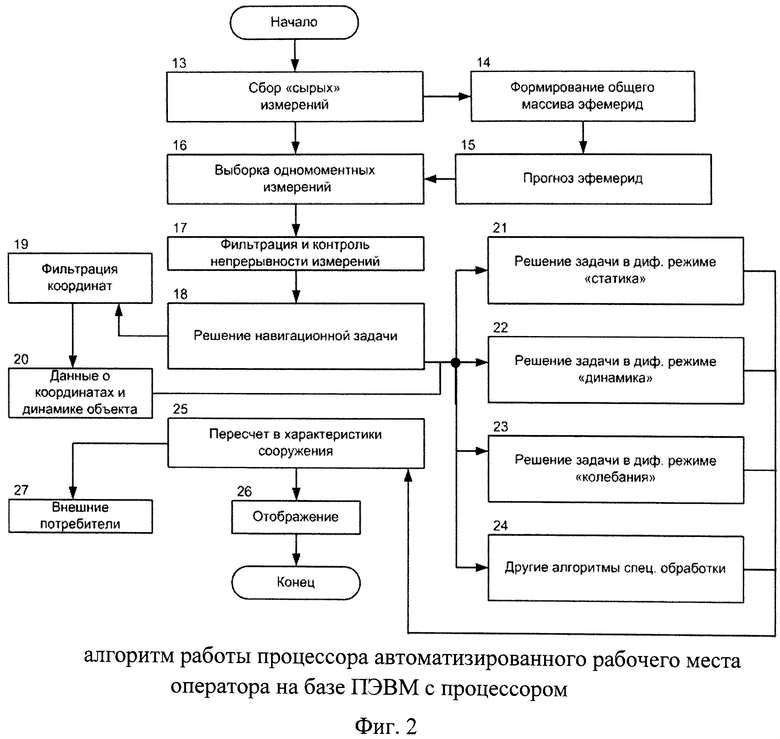
Фиг.2 - Алгоритм работы процессора автоматизированного рабочего места оператора на базе ПЭВМ с процессором, где:
13 - блок сбора «сырых» измерений от измерительных модулей;
14 - блок формирования общего массива эфемерид наблюдаемых навигационных спутников;
15 - блок прогноза эфемерид наблюдаемых навигационных спутников;
16 - блок подготовки одномоментных «сырых» измерений и эфемерид;
17 - блок фильтрации и контроля непрерывности измерений;
18 - блок решения навигационной задачи для опорных и контролируемых точек;
19 - блок фильтрации рассчитанных координат;
20 - блок данных о координатах и динамике объекта;
21 - блок решения навигационной задачи в дифференциальном режиме «статика»;
22 - блок решения навигационной задачи в дифференциальном режиме «динамика»;
23 - блок решения навигационной задачи в дифференциальном режиме «колебания»;
24 - блок специальной обработки;
25 - блок пересчета рассчитанных характеристик в параметры сооружения;
26 - блок отображения результатов;
27 - блок передачи данных внешним потребителям.
Измерительные модули устанавливаются в выбранные на этапе обследования контролируемые точки объекта (сооружения), а один из измерительных модулей устанавливается на опорный объект, относительно которого будут измеряться характеристики смещений контролируемого объекта. Измерительные модули, установленные на контролируемом объекте, обозначаются как контрольные точки, измерительный модуль, установленный на опорном объекте, обозначается как опорная точка. Измерительные модули соединяются с автоматизированным рабочим местом оператора на базе ПЭВМ с процессором с помощью средств связи, например проводных линий связи, беспроводных линий связи, в том числе посредством сети Интернет.
При необходимости на контролируемый объект вместе с измерительными модулями устанавливается датчиковая аппаратура, например инклинометры, акселерометры, датчики влажности, датчики температуры и т.п., которая соединяется с автоматизированным рабочим местом оператора на базе ПЭВМ с процессором с помощью средств связи, например проводных линий связи, беспроводных линий связи, в том числе посредством сети Интернет с помощью преобразующих устройств. Часть датчиков входит в состав измерительного модуля.
Измерения с использованием навигационного поля глобальных навигационных спутниковых систем (ГНСС) не могут проводиться во всех критически важных точках сооружения и не могут обеспечить контроль целого ряда важных параметров. Поэтому эффективность мониторинга сооружений существенно возрастает, если дополнительно применять инерциальную и другую датчиковую аппаратуру, например инклинометры, акселерометры, датчики влажности, температуры и т.п. При этом часть датчиков целесообразно размещать внутри измерительных модулей, а другую часть - вне модулей. Измерительные модули и внешние датчики соединяются с автоматизированным рабочим местом оператора на базе ПЭВМ с процессором с помощью средств связи, например проводных или беспроводных линий связи.
Устройство работает следующим образом.
На навигационный приемник ГЛОНАСС/GPS (3) через навигационную антенну ГЛОНАСС/GPS (4) поступают сигналы ГНСС ГЛОНАСС/GPS и вместе с данными, полученными от встроенных датчиков (81…8M), сохраняются посредством контроллера с энергонезависимой памятью (2), после этого поступая на приемо-передающий модуль связи (5). Из приемопередающего модуля связи (5) сигнал с помощью средств связи (10) передается на автоматизированное рабочее место оператора на базе ПЭВМ с процессором (11), которое принимает данные со всех измерительных модулей (11…1L) в виде «сырых» измерений и эфемеридной информации, буферизует их (ставит в очередь на обработку), кроме того записывает в файловый архив для возможности постобработки. Данные с отдельно стоящих датчиков (91…9N), не требующих прецизионной временной привязки в реальном времени, также передаются на автоматизированное рабочее место оператора на базе ПЭВМ с процессором (11), где проходят совместную обработку с данными, получаемыми с измерительных модулей (11…1L). Результаты обработки передаются во внешние системы (12), например в диспетчерские центры.
Блок сбора «сырых» измерений от измерительных модулей 13 принимает данные со всех измерительных модулей в виде кодовых псевдодальностей, фазовых измерений и эфемеридной информации, буферизует их (ставит в очередь на обработку), кроме того записывает в файловый архив для постобработки. Параллельно с накоплением измерений в блоке сбора «сырых» измерений от измерительных модулей 13, в блоке формирования общего массива эфемерид наблюдаемых навигационных спутников 14 формируется массив эфемеридной информации наблюдаемых спутников. По эфемеридной информации в блоке прогноза эфемерид наблюдаемых навигационных спутников 15 производится расчет координат спутников на пятисекундные интервалы времени, что позволяет снизить нагрузку на процессор. Достаточно рассчитать координаты спутника на три момента времени (t, (t+5), (t+10)) и построить интерполирующий полином второго порядка для промежутка времени [t, t+10]:
При обработке измерений, полученных с темпом 20 Гц (за 10 с - 200 отсчетов), это позволит выполнить всего 3 вычисления с использованием численного интегрирования (вместо 200), а для вычисления координат спутников внутри интервала [t, t+10] использовать полином вида:
Как показывают расчеты, погрешность интерполяции не превышает 1 мм.
В блоке подготовки одномоментных «сырых» измерений и эфемерид 16 группируются одномоментные «сырые» измерения от измерительных модулей контролируемой и опорной точек и соответствующие им координаты спутников, которые передаются в блок фильтрации и контроля непрерывности измерений 17 для фильтрации и контроля непрерывности измерений. В блоке фильтрации и контроля непрерывности измерений 17 с помощью разностей фазовых измерений псевдодальности выявляются и восстанавливаются сбои приемника при слежении за фазой колебаний несущей частоты, а также проводится экстраполяция одиночных выпавших измерений.
В блоке решения навигационной задачи для опорных и контролируемых точек 18 решается навигационная задача независимо для каждой из контролируемой точек с помощью аналитического метода. На данном шаге уточняется сдвиг часов приемника измерительного модуля от системного времени. Формируется очередь на обработку данных в блоках решения навигационной задачи в дифференциальном режиме «статика» 21, решения навигационной задачи в дифференциальном режиме «динамика» 22, решения навигационной задачи в дифференциальном режиме «колебания» 23, специальной обработки 24 для решения в них дифференциальной задачи. Информация о координатах и сдвиге времени каждого измерительного модуля фильтруется в блоке фильтрации рассчитанных координат 19. В блоке данных о координатах и динамике объекта 20 формируется статистика об осредненных координатах и динамике контролируемых точек. Далее в блоках решения навигационной задачи в дифференциальном режиме «статика» 21, решения навигационной задачи в дифференциальном режиме «динамика» 22, решения навигационной задачи в дифференциальном режиме «колебания» 23, специальной обработки 24 ведется обработка информации в дифференциальном режиме с целью:
- определения постоянной составляющей базовой линии (режим обработки «статика») (21);
- определения отклонений базовой линии с фильтрацией шумов (режим обработки «динамика» или «движение» - блок) (22);
- определения спектральных параметров отклонений базовой линии (режим обработки «колебания» - блок) (23);
- блок специальной обработки 24 предусмотрен для других специфичных способов обработки информации (например, для высокоточного контроля просадки грунта сооружения без требований к точности в плоскости).
В блоке пересчета рассчитанных характеристик в параметры сооружения 25 полученные результаты обработки сравниваются с пороговыми значениями для контролируемого сооружения и формируются, в частности, сигналы тревоги.
Блок отображения результатов 26 предназначен для подготовки информации к отображению, а блок передачи данных внешним потребителям 27 - для представления ее внешним потребителям (диспетчерские центры, системы имитационного моделирования, поддержки принятия решений и т.п.).
В качестве средств связи могут использоваться, например оптический модем Jetcon 2401-mw, преобразователь интерфейса MOXAIA-240-LX-T, VDSL-медиа конвертер Рlanet VC-234.
В процессе испытаний системы высокоточного мониторинга смещений инженерных сооружений осуществлялось слежение за смещениями элементов конструкций инженерных сооружений (мостов, высотных зданий и т.д.) по трем пространственным координатам путем сбора и обработки данных с измерительных модулей - контролируемых точек, и измерительных модулей - опорных точек.
Анализ полученных данных показал определение смещений контролируемых точек с погрешностью 0,3-1 см, определение спектральных характеристик смещений (резонансных частот конструкции) в диапазоне частот 0,1-10 Гц с погрешностью не более 1 мм, что доказывает достижение указанного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СПУТНИКОВОГО МОНИТОРИНГА СМЕЩЕНИЙ ИНЖЕНЕРНЫХ СООРУЖЕНИЙ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ ГЛОНАСС/GPS | 2011 |
|
RU2467298C1 |
| Устройство для определения пространственных координат контролируемых элементов инженерных или природных объектов при геодезическом мониторинге в режиме реального времени в условиях экстремальных температур окружающей среды посредством навигационной аппаратуры, принимающей сигналы космических аппаратов (КА) глобальных навигационных спутниковых систем (ГНСС), включая сигналы КА ГЛОНАСС/GPS | 2021 |
|
RU2779777C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОСАДОК ИНЖЕНЕРНЫХ СООРУЖЕНИЙ ПО СРЕДСТВАМ РАДАРНОГО ИЗЛУЧАТЕЛЯ/ДЕТЕКТОРА, ЗАКРЕПЛЕННОГО НА БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ, ОБОРУДОВАННОМ СИСТЕМОЙ ПОЗИЦИОНИРОВАНИЯ | 2023 |
|
RU2806805C1 |
| Информационно-аналитическая система мониторинга механической безопасности конструкций сложного инженерного сооружения | 2020 |
|
RU2751053C1 |
| АВТОМАТИЗИРОВАННАЯ КОМПЛЕКСНАЯ СИСТЕМА МОНИТОРИНГА УДАЛЕННЫХ ОБЪЕКТОВ И СПОСОБ МОНИТОРИНГА УДАЛЕННЫХ ОБЪЕКТОВ | 2023 |
|
RU2820412C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ПРИКЛАДНОЙ ПОТРЕБИТЕЛЬСКИЙ ЦЕНТР НАВИГАЦИОННО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ | 2014 |
|
RU2568924C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| СПОСОБ МОНИТОРИНГА КОНТРОЛИРУЕМЫХ ПАРАМЕТРОВ В МНОЖЕСТВЕ ЛОКАЛЬНЫХ ОБЛАСТЕЙ С ИСПОЛЬЗОВАНИЕМ МАРКИРОВОК | 2014 |
|
RU2598290C2 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
Изобретение относится к области систем мониторинга смещения инженерных сооружений и может быть использовано для ведения непрерывного контроля смещений и колебаний элементов конструкций мостов, плотин, башен и других инженерных сооружений с целью ранней диагностики целостности сооружения, а также оперативного обнаружения потери устойчивости сооружения. Технический результат заключается в повышении точности расчета характеристик смещений инженерных сооружений и обеспечении непрерывного контроля параметров смещений инженерных сооружений. Для этого система содержит измерительный модуль, включающий навигационную антенну ГЛОНАСС/GPS, навигационный приемник ГЛОНАСС/GPS, контроллер с энергонезависимой памятью, приемопередающий модуль связи, аккумуляторную батарею, устройство зарядки аккумуляторной батареи, датчиковую аппаратуру измерительного модуля, внешнюю датчиковую аппаратуру, автоматизированное рабочее место оператора на базе ПЭВМ с процессором. 2 ил.
Система высокоточного мониторинга инженерных сооружений, содержащая измерительный модуль, включающий навигационную антенну ГЛОНАСС/GPS, навигационный приемник ГЛОНАСС/GPS, контроллер с энергонезависимой памятью, приемопередающий модуль связи, аккумуляторную батарею, устройство зарядки аккумуляторной батареи, датчиковую аппаратуру измерительного модуля; внешнюю датчиковую аппаратуру, автоматизированное рабочее место оператора на базе ПЭВМ с процессором, при этом устройство зарядки аккумуляторной батареи соединено с аккумуляторной батареей, которая соединена с контроллером с энергонезависимой памятью, выход навигационной антенны ГЛОНАСС/GPS подключен к входу навигационного приемника ГЛОНАСС/GPS, вход-выход навигационного приемника соединен с первым входом-выходом контроллера с энергонезависимой памятью, второй вход-выход которого соединен с первым входом-выходом приемопередающего модуля связи, второй вход-выход которого служит для обмена данными с автоматизированным рабочим местом оператора на базе ПЭВМ с процессором через средства связи по протоколу TCP/IP, выход датчиковой аппаратуры измерительного модуля соединен с входом контроллера с энергонезависимой памятью, выход внешней датчиковой аппаратуры соединен с автоматизированным рабочим местом оператора на базе ПЭВМ с процессором через средства связи по протоколу TCP/IP, при этом автоматизированное рабочее место оператора на базе ПЭВМ с процессором имеет выход для передачи информации во внешние системы - диспетчерские центры, при этом процессор ПЭВМ автоматизированного рабочего места оператора выполнен с возможностью:
- слежения за смещениями элементов конструкций инженерных сооружений по трем пространственным координатам;
- сбора данных с измерительных модулей;
- анализа полученных данных и определение смещений контролируемых точек;
- определения спектральных характеристик смещений - резонансных частот конструкции;
- формирования сигналов тревоги в случае выхода смещений контролируемых параметров за пределы установленных границ;
- отображения результатов обработки информации в удобном для оператора виде;
- документирования и хранения полученных данных.
| СПОСОБ МОНИТОРИНГА СМЕЩЕНИЙ ЗЕМНОЙ ПОВЕРХНОСТИ И ДЕФОРМАЦИЙ СООРУЖЕНИЙ НА ТЕРРИТОРИИ МЕСТОРОЖДЕНИЯ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2009 |
|
RU2446411C2 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНЫХ ДЕФОРМАЦИЙ И СМЕЩЕНИЙ ПОДЗЕМНЫХ И/ИЛИ НАЗЕМНЫХ СООРУЖЕНИЙ | 2010 |
|
RU2453809C2 |
| Способ намотки многосекционных катушек | 1958 |
|
SU116862A1 |
| US 6961018 B2, 01.11.2005 | |||
| US 6469663 B1, 22.10.2002 | |||
| US 7642956 B2, 05.01.2010. | |||

