УРОВЕНЬ ТЕХНИКИ
Область техники
Настоящее изобретение имеет отношение к преобразованию градации изображения.
Описание предшествующего уровня техники
Преобразование градации представляет собой процесс, в котором диапазон значений пикселей в изображении выделяется по сравнению с другими диапазонами. Преобразование градации используется для выравнивания градации изображения с градацией во время записи и градацией устройства отображения и для увеличения градации интересующей области. Эта обработка позволяет предотвратить ненужную потерю деталей выделения в изображении или потерю затененных деталей в изображении. Кроме того, может быть получено изображение, в котором проще видеть интересующую область.
С другой стороны, существуют способы съемки, такие как съемка большого изображения или съемка изображения с разделением на фрагменты, в которых множество частичных изображений получается посредством съемки области съемки объекта при разделении области съемки на множество диапазонов съемки. Эти способы используются для съемки большого объекта, который не вписывается в одно изображение. Изображение целого объекта может быть получено посредством объединения отдельных частичных изображений, полученных посредством съемки большого изображения. Патент США № 7440559 рассматривает методики для преобразования градации изображения, полученного посредством съемки большого изображения. В патенте США № 7440559 рассмотрены методики, в которых преобразование градации выполняется на основе гистограммы плотности объединенного изображения или на основе одного частичного изображения.
Однако если объединенное изображение используется в качестве цели анализа, нагрузка на обработку увеличивается, что затрудняет достижение точного анализа. С другой стороны, если преобразование градации выполняется над большим изображением на основе одного частичного изображения, целое большое изображение может не иметь подходящей градации, поскольку другие частичные изображения не учитываются.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с аспектом настоящего изобретения устройство обработки изображений включает в себя средство получения изображений, выполненное с возможностью получать множество частичных изображений, полученных посредством съемки каждого из множества диапазонов съемки, на которые разделена область съемки объекта, средство получения количественных значений признаков, выполненное с возможностью получать количественное значение признака по меньшей мере одного из частичных изображений, средство получения характеристики, выполненное с возможностью получать характеристику обработки преобразования градации на основе количественного значения признака и области съемки, и средство преобразования, выполненное с возможностью преобразовывать на основе характеристики градацию изображения области съемки объекта, полученного посредством объединения частичных изображений.
Дополнительные отличительные признаки и аспекты настоящего изобретения станут понятны из следующего подробного описания иллюстративных вариантов воплощения со ссылкой на приложенные чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопроводительные чертежи, которые включены в спецификацию и составляют ее часть, показывают иллюстративные варианты воплощения, отличительные признаки и аспекты изобретения и вместе с описанием служат для разъяснения принципов изобретения.
Фиг.1 - схема конфигурации системы формирования изображений с помощью излучения в соответствии с первым иллюстративным вариантом воплощения настоящего изобретения.
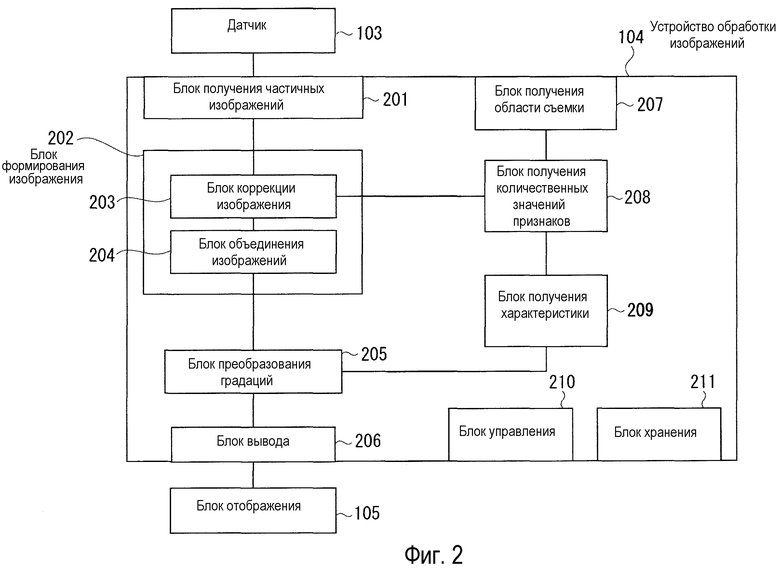
Фиг.2 иллюстрирует конфигурацию устройства обработки изображений в соответствии с первым иллюстративным вариантом воплощения.
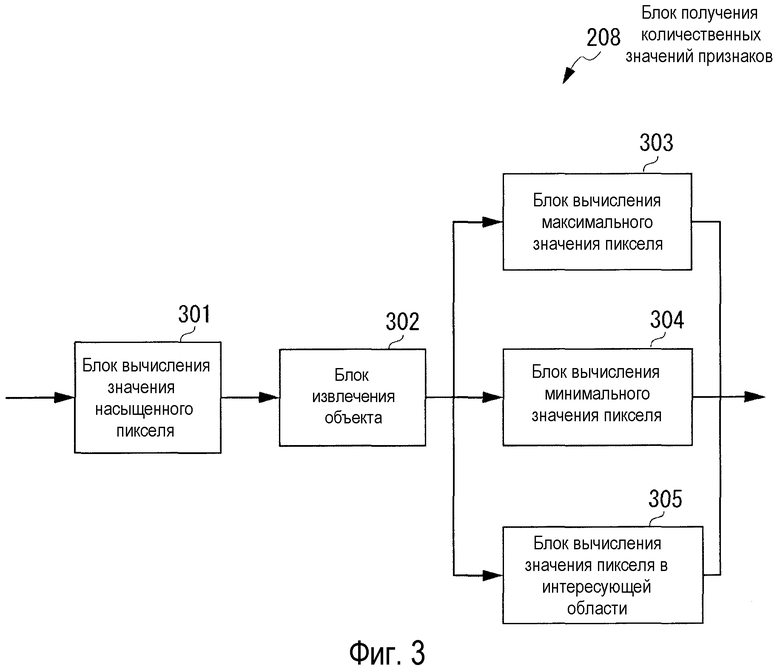
Фиг.3 иллюстрирует конфигурацию блока получения количественного значения признака в соответствии с первым иллюстративным вариантом воплощения.
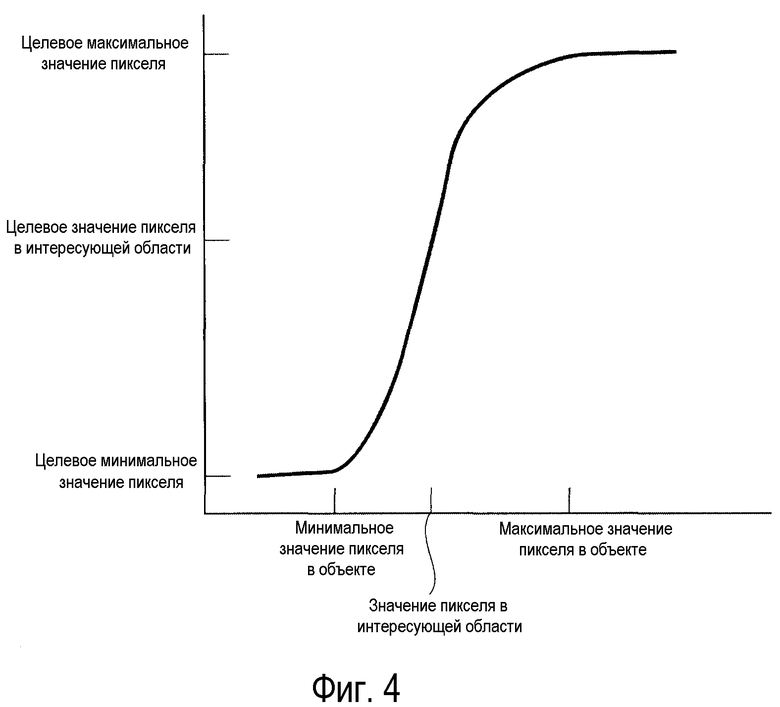
Фиг.4 иллюстрирует пример функции преобразования градации, полученной посредством устройства обработки изображений.
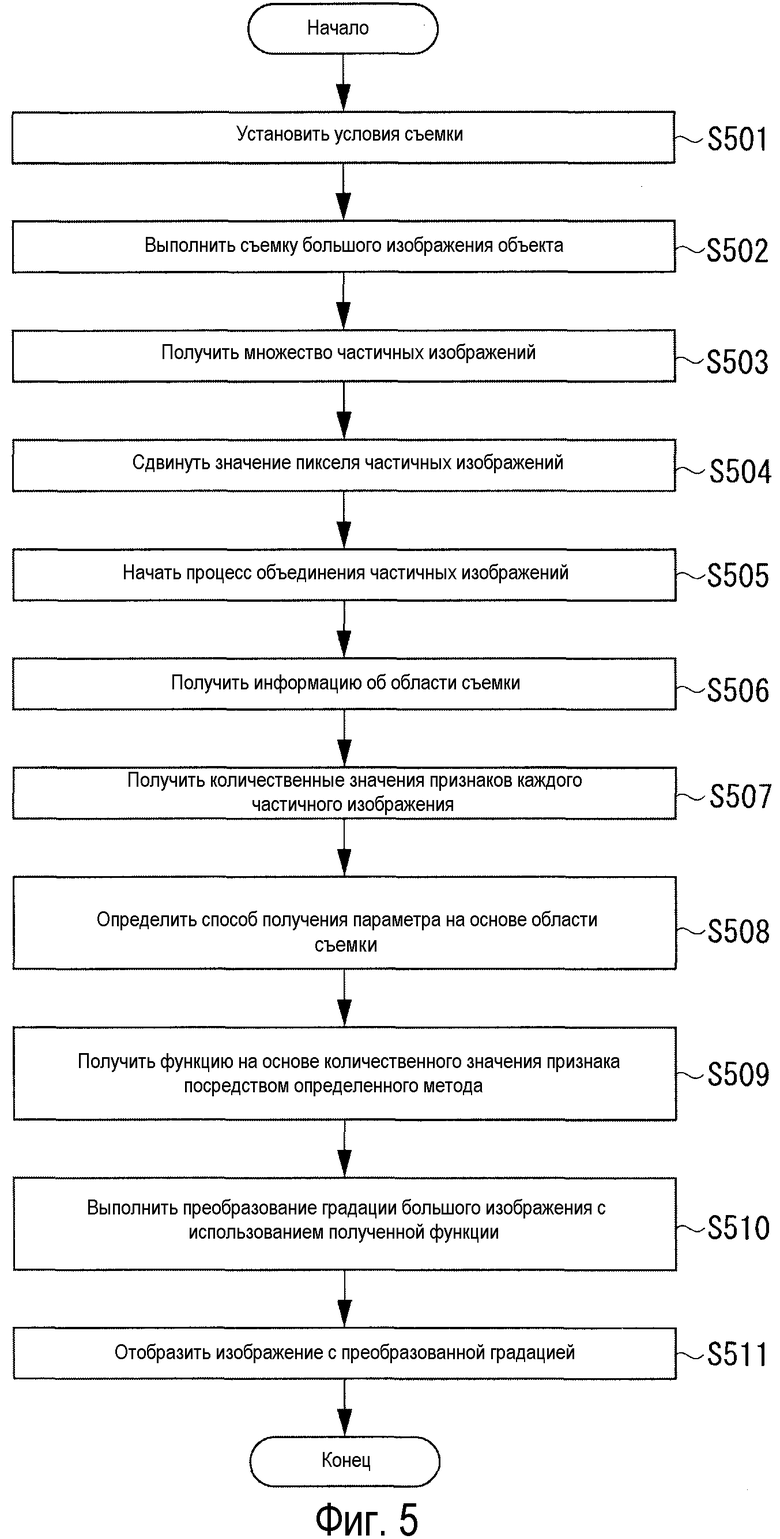
Фиг.5 - блок-схема последовательности операций, иллюстрирующая поток обработки, выполняемой системой формирования изображений с помощью излучения в соответствии с первым иллюстративным вариантом воплощения.
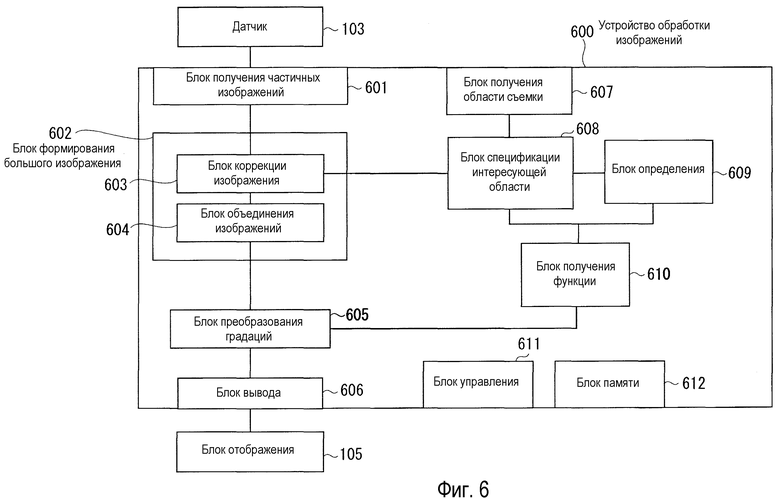
Фиг.6 иллюстрирует конфигурацию устройства обработки изображений в соответствии с пятым иллюстративным вариантом воплощения настоящего изобретения.
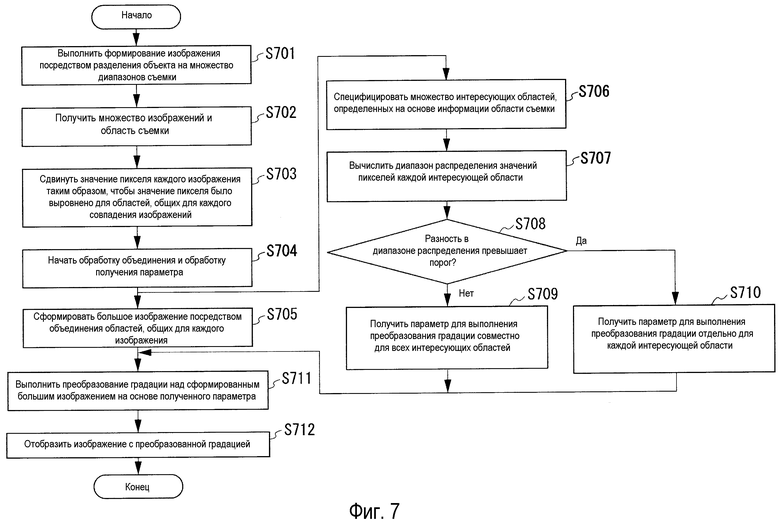
Фиг.7 - блок-схема последовательности операций, иллюстрирующая поток обработки, выполняемой системой формирования изображений с помощью излучения в соответствии с пятым иллюстративным вариантом воплощения.
ОПИСАНИЕ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Различные иллюстративные варианты воплощения, отличительные признаки и аспекты изобретения будут подробно описаны со ссылкой на чертежи.
Теперь со ссылкой на Фиг.1-7 будет описана система 100 формирования изображений с помощью излучения в соответствии с первым иллюстративным вариантом воплощения настоящего изобретения.
Сначала со ссылкой на Фиг.1 будет описана конфигурация системы 100 формирования изображений с помощью излучения. Как проиллюстрировано на Фиг.1, система 100 формирования изображений с помощью излучения включает в себя источник 101 излучения, датчик 103, устройство 104 обработки изображений и блок 105 отображения. Источник 101 излучения выполнен из рентгеновской трубки, которая испускает излучение, такое как рентгеновское излучение. Источник 101 излучения облучает объект 102 подходящей дозой излучения в течение предопределенного времени. Датчик 103 образует датчик с плоской панелью непрямого типа (FPD), который имеет флуоресцентный излучатель, преобразовывающий излучение в видимый счет, и датчик изображения, принимающий этот видимый свет и преобразовывающий его в электрический сигнал на основе количества света. Датчиком 103 может быть получен электрический сигнал, представляющий изображение объекта 102. Датчик 103 формирует изображение объекта посредством выполнения известной коррекции над этим электрическим сигналом. Поскольку коэффициент прохождения излучения зависит от вещества, через которое оно проходит, на основе изображения, полученного датчиком 103, может быть визуализирована внутренняя структура объекта. Датчик с плоской панелью прямого типа, который непосредственно преобразовывает рентгеновское излучение в электрический сигнал, также может использоваться для датчика 103.
Кроме того, система 100 формирования изображений с помощью излучения поддерживает съемку больших изображений, при которой получается множество частичных изображений посредством съемки области объекта 102 при разделении области съемки на множество диапазонов съемки. Съемка больших изображений представляет собой способ съемки, в котором съемка выполняется множество раз посредством перемещения датчика 103 вдоль объекта 102 при изменении направления облучения источника 101 излучения посредством не проиллюстрированного блока привода. Следовательно, может быть получено изображение объекта, которое больше эффективной области съемки датчика 103.
Устройство 104 обработки изображений формирует большое изображение посредством объединения множества частичных изображений, полученных посредством съемки большого изображения. Термин "большое изображение" относится к изображению, полученному посредством объединения множества частичных изображений, полученных посредством съемки большого изображения. Устройство 104 обработки изображений также определяет характеристику обработки преобразования градации посредством анализа частичных изображений и преобразовывает градацию большого изображения. Затем изображение, имеющее преобразованную градацию, отображается на блоке 105 отображения. Поскольку информация изображения, важная для диагностики, может быть отображена легко понятым способом посредством обработки преобразования градации, можно получить изображение, которое может быть легко просмотрено. Такое изображение особенно полезно при выполнении диагностики, которая включает в себя подробное исследование.
Устройство 104 обработки изображений включает в себя в качестве аппаратных средств центральный процессор (CPU) 106, оперативное запоминающее устройство (RAM) 107, постоянное запоминающее устройство (ROM) 108, накопитель 109 на жестком диске (HDD), сетевой интерфейс (I/F) 112 и интерфейс 113 блока отображения. Клавиатура 110 и мышь 111 соединены с устройством 104 обработки изображений. Компьютерная программа для реализации соответствующих функциональных блоков, проиллюстрированных на Фиг.2, или для исполнения описанных ниже процессов хранится в постоянном запоминающем устройстве (ROM) 108 или на накопителе на жестком диске (HDD) 109. Эта программа исполняется центральным процессором (CPU) 106 в оперативном запоминающем устройстве (RAM) 107 для реализации описанных ниже функций устройства 104 обработки изображений. Хотя на Фиг.1 центральный процессор (CPU) 106 проиллюстрирован только как один блок, настоящее изобретение не ограничено этим. В устройство может быть включено множество центральных процессоров 106.
Теперь со ссылкой на Фиг.2 будет более подробно описана конфигурация устройства 104 обработки изображений. Устройство 104 обработки изображений включает в себя блок 201 получения частичных изображений, блок 202 формирования изображения для формирования большого изображения, блок 205 преобразования градаций, блок 206 вывода, блок 207 получения области съемки, блок 208 получения количественных значений признаков, блок 209 получения характеристики для получения характеристики преобразования градации, блок 210 управления и блок 211 хранения.
Блок 202 формирования изображения включает в себя блок 203 коррекции изображения для коррекции значения пикселя частичного изображения, полученного посредством блока 201 получения частичных изображений, и блок 204 объединения изображений для позиционирования частичных изображений и соединения и объединения их в области наложения.
Как проиллюстрировано на Фиг.3, блок 209 получения количественных значений признаков включает в себя блок 301 вычисления значения насыщенного пикселя, блок 302 извлечения объекта, блок 303 вычисления максимального значения пикселя, блок 304 вычисления минимального значения пикселя и блок 305 вычисления значения пикселя в интересующей области. Эти блоки вычисления в блоке 208 получения количественных значений признаков вычисляют количественное значение признака посредством анализа каждого частичного изображения на основе информации об области съемки, полученной посредством блока 207 получения области съемки. Эти частичные изображения представляют собой частичные изображения, которые получены посредством блока 201 получения частичных изображений и скорректированы посредством блока 203 коррекции изображения. Полученные количественные значения признаков включают в себя значения насыщенного пикселя каждого частичного изображения, максимальное значение пикселя в объекте, минимальное значение пикселя в объекте и значение пикселя в интересующей области. Таким образом, поскольку количественные значения признаков вычислены посредством выполнения каждого процесса анализа над частичным изображением, точность обработки анализа выше, чем при анализе всего большого изображения. Кроме того, время, требуемое для обработки анализа, может быть сокращено.
Блок 209 получения характеристики получает характеристику обработки преобразования градации из количественных значений признаков посредством способа на основе области съемки. Эта "характеристика обработки" представляет собой характеристику, такую как функция, используемую при преобразовании градации, или поисковую таблицу. В настоящем иллюстративном варианте воплощения, поскольку для преобразования градации используется функция, в качестве характеристики преобразования градации получается параметр, необходимый для задания функции преобразования градации. Когда область съемки определена, поскольку определена общая тенденция значений пикселей в целевой области съемки, может быть выполнено преобразование градации на основе области съемки. Способ получения характеристики преобразования градации будет описан ниже.
Блок 210 управления централизованно управляет каждой из описанных выше функций.
Информация об интересующей области, которая необходима блоку 208 получения количественных значений признаков для получения значения пикселя в интересующей области, связана с областью съемки и хранится в блоке 211 хранения. Блок 208 получения количественных значений признаков получает значение пикселя в интересующей области посредством обращения к этой информации. Кроме того, имя функции для получения параметра, используемого блоком 209 получения характеристики при преобразовании градации на основе количественного значения признака, связано с областью съемки и хранится в блоке 211 хранения. Функция для получения этого количественного значения признака может исполняться посредством блока 209 получения характеристики. Блок 209 получения характеристики получает функцию преобразования градации в качестве характеристики для преобразования градации посредством обращения к этой информации.
Теперь со ссылкой на Фиг.4 будет описана схема обработки для получения функции преобразования градации, выполняемого блоком 209 получения характеристики.
Сначала на основе значений насыщенных пикселей, полученных в качестве количественного значения признака из каждого частичного изображения, определяется значение насыщенного пикселя для всего большого изображения посредством способа на основе области съемки. Затем пиксель, имеющий значение, равное или большее этого значения насыщенного пикселя, отсекается как максимальное значение в изображении.
Затем устанавливаются целевые значения для минимального значения пикселя, максимального значения пикселя и значения пикселя в интересующей области после преобразования. Эти целевые значения устанавливаются на основе выходного количества градации и того, насколько интересующая область должна быть выделена. Таким образом, целевые значения могут быть определены на основе области съемки или установлены с использованием предписанного значения независимо от области съемки. Таким образом, определяется функция преобразования градации, проиллюстрированная на Фиг.4.
Теперь со ссылкой на Фиг.5 будет описана последовательность операций обработки, исполняемой системой 100 формирования изображений с помощью излучения. Сначала на этапе S501 устанавливаются условия съемки объекта на основе ввода от клавиатуры 110 и мыши 111. Условия съемки также могут быть установлены посредством приема информации порядка съемки от внешней информационной системы. Эти условия съемки включают в себя информацию об области съемки, которая указывает, какая область объекта должна быть снята. Условия съемки сохраняются в блоке 211 хранения 211 устройства 104 обработки изображений.
На этапе S502 объект 102 подвергается съемке посредством управления источником 101 излучения и датчиком 103 на основе установленных условий съемки. В настоящем иллюстративном варианте воплощения, если область съемки объекта 102 больше области, которая может быть снята датчиком 103, выполняется съемка большого изображения посредством разделения объекта на множество диапазонов съемки и многократной съемки. На основе съемки большого изображения датчик 103 производит множество частичных изображений, полученных посредством съемки части области съемки объекта.
На этапе S503 блок 201 получения частичных изображений устройства 104 обработки изображений получает множество частичных изображений, полученных посредством съемки большого изображения. Частичные изображения связаны с информацией, указывающей, с каким номером было снято частичное изображение, и информацией, указывающей общее количество частичных изображений, полученных посредством съемки большого изображения, в качестве дополнительной информации.
На этапе S504 блок 203 коррекции изображения блока 202 формирования изображения корректирует значения пикселей множества полученных частичных изображений. В качестве способа коррекции значений пикселей может использоваться способ, в котором значение пикселя каждого полного изображения сдвигается с использованием среднего значения наложенных областей, как в традиционном способе, и затем выполняется коррекция значений пикселей для приблизительного соответствия значениям пикселей наложенных областей. Здесь "приблизительное соответствие" не должно интерпретироваться строго. Например, "приблизительное соответствие" может означать, что среднее значение значений пикселей в общих областях делается ниже предопределенного порога. Кроме того, коррекция значений пикселей также может быть выполнена посредством минимизации значения разности в гистограмме наложенных областей.
На этапе S505 блок 210 управления начинает процесс объединения частичных изображений со скорректированными пикселями в блоке 204 объединения изображений. Блок 204 объединения изображений позиционирует множество снятых частичных изображений и объединяет частичные изображения для формирования большого изображения. В качестве способа объединения изображений используется известный способ, в котором коэффициент вклада каждого изображения постепенно изменяется на основе расстояния от точки соединения в области, где изображения накладываются друг на друга. Позиционирование может быть выполнено на основе признака изображения посредством блока 204 объединения изображений или выполнено пользователем с использованием ручной регулировки.
Процесс для определения функции преобразования градации из этапов S506-S509 выполняется параллельно с процессом объединения изображения, начатым на этапе S505. Следовательно, время от съемки до того, как большое изображение, имеющее преобразованную градацию, будет отображено на блоке 105 отображения, может быть сокращено. Кроме того, частичные изображения, полученные блоком 201 получения частичных изображений, могут быть проанализированы последовательно во время съемки большого изображения объекта 102. Выполнение процессов таким образом позволяет сократить продолжительности процессов.
На этапе S506 блок 207 получения области съемки получает область съемки из информации об условиях съемки, сохраненной в блоке 211 хранения.
На этапе S507 блок 208 получения количественных значений признаков получает количественные значения признаков посредством анализа частичных изображений, имеющих сдвинутое значение пикселя. Полученные количественные значения признаков представляют собой максимальное значение пикселя в объекте, минимальное значение пикселя, значение пикселя в интересующей области и значение насыщенного пикселя. Эти количественные значения признаков получаются для каждого частичного изображения.
Блок 301 вычисления значения насыщенного пикселя вычисляет значение насыщенного пикселя частичных изображений, над которыми была выполнена коррекция значений пикселей. Вычисление значения насыщенного пикселя может быть выполнено с использованием способа, который использует характеристику датчика.
Блок 302 извлечения объекта извлекает объект, который остается после удаления из частичных изображений части, в которой рентгеновское излучение падало на прямой рентгеновский датчик с плоской панелью без прохождения через объект, и части экранирования, которая ограждена коллиматором и т.п. Способ извлечения объекта может быть выполнен с использованием способа, который использует результаты анализа гистограмм и двухмерного анализа.
Блок 303 вычисления максимального значения пикселя вычисляет максимальное значение в части объекта. В качестве способа вычисления максимального значения пикселя может использоваться способ, который вычисляет репрезентативное значение на основе гистограммы изображения. Однако настоящее изобретение не ограничено этим. Может быть применен любой способ вычисления максимального значения пикселя.
Блок 304 вычисления минимального значения пикселя вычисляет минимальное значение в части объекта параллельно с процессом вычисления максимального значения, выполняемым блоком 303 вычисления максимального значения пикселя. В качестве способа вычисления минимального значения пикселя может использоваться способ, который вычисляет репрезентативное значение на основе гистограммы изображения.
Блок 305 вычисления значения пикселя в интересующей области вычисляет значение пикселя в интересующей области в объекте. В качестве способа вычисления значения пикселя может использоваться способ, который вычисляет репрезентативное значение на основе гистограммы изображения, или способ, который извлекает интересующую область из двумерной структуры изображения и получает из нее статистическое значение в качестве репрезентативного значения. Поскольку информация, используемая для определения интересующей области, хранится в блоке 211 хранения для каждой области съемки, блок 305 вычисления значения пикселя в интересующей области выполняет обработку посредством обращения к этой информации. Эта обработка выполняется для каждого частичного изображения. На основе обработки на этапе S507 для каждого частичного изображения получаются четыре типа количественных значений признаков.
На этапе S508 блок 209 получения характеристики определяет способ получения параметра, который будет использоваться при преобразовании градации, из количественных значений признаков на основе информации об области съемки. Как описано выше, информация об области съемки и информация, указывающая способ получения параметра из количественных значений признаков, связаны друг с другом и хранятся в блоке 211 хранения. Блок 209 получения характеристики обращается к этой информации для определения способа получения параметра.
Сначала блок 209 получения характеристики получает значение насыщенного пикселя большого изображения на основе значения насыщенного пикселя в каждом частичном изображении. Например, при съемке всей длины нижних конечностей среди значений насыщенных пикселей, полученных из каждого частичного изображения, одно из самых низких значений выбирается для использования в качестве значения насыщенного пикселя для объединенного изображения. Выбор самого низкого значения позволяет отсечь пиксели, имеющие большее значение пикселя, чем самое низкое значение пикселя, вычисленное в качестве значения насыщенного пикселя. Поскольку толщина нижних конечностей не очень изменяется по их длине, маловероятно ошибочно принять нормальный пиксель за насыщенный пиксель. Следовательно, посредством отсечения значений пикселей, которые больше значения насыщенного пикселя, влияние насыщенных пикселей может быть уменьшено. С другой стороны, при съемке всего позвоночника примеры используемого способа включают в себя способ, в котором из значений насыщенных пикселей, полученных для каждого множества выбранных частичных изображений, вычисляется среднее значение пикселя, и затем это среднее значение берется в качестве значения насыщенного пикселя объединенного изображения; способ, в котором вычисляется срединное значение значений насыщенных пикселей каждого частичного изображения; и способ, в котором используется максимальное значение. Если имеется ошибка в вычислении значения насыщенного пикселя соответствующих частичных изображений, использование среднего значения или срединного значения уменьшает воздействие ошибки, что дает возможность выполнять устойчивое отсечение. Кроме того, способы, которые вычисляют среднее значение или срединное значение для значения насыщенного пикселя, являются эффективными при съемке при условиях, которые не изменяются при съемке каждого частичного изображения, например, доза облучения для съемки и расстояние между фокусом и датчиком. При съемке всего позвоночника, поскольку разность в толщине объекта является большой, использование максимального значения позволяет уменьшить ошибки, при которых отсекаются нормальные пиксели. Таким образом, оптимальное значение насыщенного пикселя может быть вычислено посредством выбора оптимального способа вычисления на основе условий съемки.
Затем блок 209 получения характеристики получает максимальное значение пикселя большого изображения на основе максимального значения объекта в каждом частичном изображении. При съемке области, толщина которой очень сильно изменяется, например, области всего позвоночника, блок 209 получения характеристики получает наибольшее значение пикселя среди максимальных значений пикселей соответствующих частичных изображений в качестве максимального значения пикселя. Блок 209 получения характеристики также получает наименьшее значение пикселя среди минимальных значений пикселей соответствующих частичных изображений. Для всего позвоночника, поскольку разность между толстыми частями и тонкими частями в объекте является большой, может быть достигнута градация, которая отражает это изменение. С другой стороны, при съемке области, в которой толщина объекта изменяется не очень сильно, например, вся длина нижних конечностей, вычисляется среднее значение или срединное значение как максимальных, так и минимальных значений пикселей каждого частичного изображения. Если используются среднее значение или срединное значение, даже если имеется ошибка в вычислении максимального/минимального значения пикселя некоторых из частичных изображений, может быть выполнена устойчивая обработка градации, поскольку воздействие ошибки может быть уменьшено. Таким образом, максимальное значение пикселя объекта и минимальное значение пикселя объекта, которые подходят для цели диагностики, могут быть вычислены посредством выбора способа вычисления на основе области съемки.
Блок 209 получения характеристики также выбирает срединное значение на основе значения пикселя в интересующей области каждого частичного изображения и устанавливает это срединное значение в качестве значения пикселя в интересующей области объединенного изображения. Посредством такого выбора срединного значения, даже если в значении пикселя в интересующей области некоторых из частичных изображений имеется ошибка, воздействие этой ошибки может быть уменьшено. Кроме того, способ вычисления может использовать среднее значение множества выбранных значений пикселей в интересующей области. Кроме того, при использовании значения, которое отражает множество значений пикселей в интересующей области, даже если в анализе частичных изображений имеется ошибка, воздействие этой ошибки может быть уменьшено. Например, при съемке всей длины нижних конечностей, если интересующая область представляет собой костную ткань, нет большого различия в значениях пикселей в интересующей области каждого частичного изображения. В таком случае посредством использования способа, в котором интересующая область большого изображения устанавливается посредством вычисления срединного значения или среднего значения, преобразование градации костной ткани, которая представляет собой интересующую область, может быть подходящим образом выполнено с уменьшением воздействия ошибки в анализе частичных изображений.
Когда значения пикселей интересующей области являются очень разными, используется способ, в котором одно значение пикселя интересующей области выбирается из соответствующих частичных изображений. Например, при съемке всего позвоночника, если интересующая область представляет собой поясничный отдел позвоночника, в зависимости от частичного изображения значение пикселя интересующей области изображения, полученного посредством съемки главным образом грудного отдела позвоночника, и значение пикселя изображения, полученного посредством съемки главным образом поясничного отдела позвоночника, могут сильно отличаться. В таком случае выбирается значение пикселя интересующей области, вычисленное на основе изображения, полученного посредством съемки поясничного отдела позвоночника. Наоборот, если интересующая область представляет собой грудной отдел позвоночника, функция преобразования градации получается с использованием значения пикселя интересующей области, полученного из изображения, полученного посредством съемки главным образом грудного отдела позвоночника. Кроме того, при съемке всего тела, если интересующая область представляет собой костную ткань, в значениях пикселей интересующей области соответствующих частичных изображений будет часто иметься значение пикселя, которое очень отличается от других значений пикселя. В таком случае, чтобы исключить ненормальное значение из анализа частичных изображений, интересующая область может быть установлена посредством отказа от максимального значения и минимального значения из значений пикселей интересующей области соответствующих частичных изображений и затем вычисления среднего значения на основе оставшихся значений пикселей. Таким образом, значение пикселя интересующей области, которое подходит для цели диагностики, может быть вычислено посредством выбора способа вычисления на основе области съемки.
На этапе S509 блок 209 получения характеристики получает функцию преобразования градации на основе полученного параметра. Поскольку этот процесс является таким же, как описанный со ссылкой на Фиг.4, его описание будет здесь опущено.
На этапе S510 блок 205 преобразования градации выполняет преобразование градации большого изображения. Когда процесс объединения изображения, начатый на этапе S505, закончен, блок 210 управления ожидает окончания обработки получения параметра преобразования градации, выполняемый на этапе S509, и затем дает команду блоку 205 преобразования градации начать преобразование градации большого изображения. На основе этой команды блок 205 преобразования градации преобразовывает градацию большого изображения в соответствии с функцией преобразования градации.
На этапе S511 блок 206 вывода выдает изображение, имеющее преобразованную градацию, на блок 105 отображения, и блок 105 отображения отображает это изображение.
Как описано выше, посредством вычисления количественных значений признаков посредством анализа каждого частичного изображения, полученного посредством съемки большого изображения, точность анализа может быть увеличена по сравнению с тем, когда анализируется объединенное изображение, и продолжительность обработки может быть сокращена. Кроме того, посредством производства функции преобразования градации посредством объединения количественных значений признаков посредством способа на основе области съемки может быть реализовано преобразование градации большого изображения, подходящее для каждой области съемки.
В первом иллюстративном варианте воплощения четыре типа количественных значений признаков вычисляются из каждого частичного изображения. Однако во втором иллюстративном варианте воплощения настоящего изобретения получаются только количественные значения признаков, необходимые для получения функции преобразования градации для значения пикселя интересующей области. Процесс получения некоторых количественных значений признаков из частичных изображений опущен. Далее будет опускаться описание составных элементов и процессов, которые являются такими же, как в первом иллюстративном варианте воплощения. Будут описаны только отличительные признаки настоящего иллюстративного варианта воплощения.
Блок 208 получения количественных значений признаков выполняет процесс определения типа количественного значения признака, которое будет получено из каждого изображения, на основе информации об области съемки. Например, при съемке всей длины нижних конечностей, если интересующая область представляет собой костную ткань, нет большой разности значений пикселей интересующей области соответствующих частичных изображений. Таким образом, информация, определяющая любое из частичных изображений, показывающих костную ткань, относится к информации об области съемки и сохраняется в блоке 211 хранения. Блок 208 получения количественных значений признаков обращается к этой информации и получает значение пикселя интересующей области только из указанного частичного изображения.
В качестве другого примера при съемке всего позвоночника, как описано выше, если интересующая область представляет собой поясничный отдел позвоночника, значение пикселя интересующей области изображения, полученного посредством съемки главным образом грудного отдела позвоночника, и значения пикселя изображения, полученного посредством съемки главным образом поясничного отдела позвоночника, могут сильно отличаться. Поэтому, если в качестве интересующей области предварительно установлен поясничный отдел позвоночника, значение пикселя интересующей области получается только из частичного изображения, полученного посредством съемки поясничного отдела позвоночника.
В качестве еще одного примера, если имеется множество интересующих областей в большом изображении поясничного отдела позвоночника, грудного отдела позвоночника и т.п., и если ширина распределения значений пикселя в каждой интересующей области является большой только в одном изображении, выделение целой интересующей области может быть не достаточным или изображение может быть неестественным. Таким образом, неестественная градация может быть предотвращена посредством получения значения пикселя интересующей области только из частичного изображения, определенного на основе области съемки, и выполнения преобразования градации на основе этого значения.
Таким образом, посредством выполнения анализа над частичным изображением, определенным на основе информации об области съемки, необходимость выполнения анализа для всех частичных изображений устраняется. Следовательно, продолжительность обработки может быть сокращена, и нагрузка на процесс может быть уменьшена.
Кроме того, в настоящем иллюстративном варианте воплощения среди соответствующих частичных изображений блок 208 получения количественных значений признаков извлекает количественные значения признаков только из областей, которые не накладываются на другие частичные изображения. Это делается потому, что при съемке большого изображения области, которые включают в себя много информации, необходимой для диагностики, часто снимаются посредством корректировки позиции съемки, с тем чтобы они не накладывались, и чтобы анализ мог быть выполнен с исключением наложенных областей. Кроме того, в упомянутых выше иллюстративных вариантах воплощения, поскольку процесс объединения и процесс анализа частичных изображений выполняются параллельно, значения пикселей наложенных областей изменяются в зависимости от обработки объединения. Таким образом, точность анализа может ухудшиться. Посредством установки в качестве цели анализа только не наложенных областей точность обработки анализа для получения функции преобразования градации может быть увеличена, и продолжительность обработки может быть уменьшена.
В третьем иллюстративном варианте воплощения настоящего изобретения интересующая область в одном большом изображении разделяется в предопределенные группы, такие как, например, поясничный отдел позвоночника и грудной отдел позвоночника при съемке всего позвоночника, и функция преобразования градации получается для каждой группы. Группировка связана с информацией об области съемки и предварительно сохранена в блоке 211 хранения. Например, при съемке всего позвоночника, поскольку имеется большое различие в распределении пикселей между поясничным отделом позвоночника и грудным отделом позвоночника, каждый из них устанавливается как отдельная группа. Наоборот, при съемке всей длины нижних конечностей и установке костной ткани в качестве интересующей области, поскольку различие значений пикселей интересующей области, полученных из множества частичных изображений, не является таким большим, эти интересующие области устанавливаются в качестве одной группы. Это группирование может быть установлено вручную с использованием клавиатуры 110 и мыши 111 для каждой области съемки. Блок 208 получения количественных значений признаков обращается к этой информации для получения количественных значений признаков из каждого частичного изображения для получения функции преобразования градации, соответствующей каждой группе. Аналогично первому иллюстративному варианту воплощения типы количественных значений признаков включают в себя значение насыщенного пикселя, минимальное значение пикселя в объекте, максимальное значение пикселя в объекте и значение пикселя интересующей области. Блок 209 получения характеристики получает функцию преобразования градации на основе полученных количественных значений признаков.
Теперь будет описан конкретный пример обработки. Обработка минимального значения пикселя и максимального значения пикселя большого изображения выполняется таким же образом, как в первом иллюстративном варианте воплощения и для большого изображения всего позвоночника, и для большого изображения всей длины нижних конечностей. Что касается значения пикселя интересующей области, при съемке всего позвоночника получается функция преобразования градации, которая выделяет значение пикселя интересующей области, полученное из поясничного отдела позвоночника, и функция преобразования градации, которая выделяет значение пикселя интересующей области, полученное из грудного отдела позвоночника. С другой стороны, при съемке всей длины нижних конечностей значение пикселя костной ткани получается из одного частичного изображения, и получается функция преобразования градации для выделения этого значения пикселя.
Таким образом, посредством получения функции преобразования градации для каждой группы функция преобразования градации может быть получена для каждой интересующей области, имеющей сходное распределение значений пикселей. По сравнению с получением функции преобразования градации для каждого частичного изображения, когда есть интересующие области, имеющие очень разное распределение значений пикселей в частичных изображениях, поскольку получаются отдельные функции преобразования градации, соответствующие каждой интересующей области, может быть получено изображение, которое подходящим образом выделяет разные интересующие области. Кроме того, когда есть интересующие области, имеющие сходные распределения значений пикселей, которые охватывают множество частичных изображений, поскольку эти интересующие области могут быть выделены совместно при помощи одной функции преобразования градации, процесс получения функции, выполняемый блоком 209 получения характеристики, и нагрузка на процесс блока 205 преобразования градации 205 могут быть сокращены. Кроме того, вместо группирования интересующих областей могут быть сгруппированы частичные изображения.
В четвертом иллюстративном варианте воплощения настоящего изобретения множество функций преобразования градации получаются на основе области съемки.
Хотя большое изображение, полученное посредством съемки большого изображения, может рассматриваться как имеющее широкую область изображения с множеством интересующих областей, поскольку область изображения является большой, динамический диапазон также является большим. Следовательно, необходимо подготовить множество функций преобразования градации и использовать эти функции на основе цели диагностики.
Таким образом, в отличие от второго иллюстративного варианта воплощения, но аналогично первому иллюстративному варианту воплощения, в четвертом иллюстративном варианте воплощения значение насыщенного пикселя, максимальные и минимальные значения пикселей в объекте и значение пикселя интересующей области получаются из каждого частичного изображения, и получается множество функций преобразования градации. В четвертом иллюстративном варианте воплощения, что касается интересующей области, независимо от области съемки количество функций преобразования градации, в которых значение пикселя интересующей области, полученное из каждого частичного изображения, служит значением пикселя интересующей области для получаемого целого большого изображения, представляет собой только количество значений пикселей интересующей области. В этом случае, поскольку не обязательно изменять тип количественного значения признака, полученного на основе информации об области съемки, аппаратная конфигурация или процесс могут быть упрощены.
Кроме того, определяется среднее значение или срединное значение значения пикселя интересующей области, полученного из каждого частичного изображения, и это значение используется для получения функции преобразования градации. При выборе съемки большого изображения пользователь может пожелать видеть тенденцию всего большого изображения. Большое изображение, которое удовлетворяет это желание, может быть получено посредством использования изображения, которое показывает тенденцию всего изображения.
В настоящем иллюстративном варианте воплощения на блоке 105 отображения отображается большое изображение до преобразования градации посредством исключения обработки преобразования градации, выполняемого блоком 205 преобразования градации. Кроме того, это большое изображение отображается как последовательные варианты в порядке, в котором были параллельно получены функции преобразования градации. Блок 210 управления выполняет управление таким образом, чтобы большое изображение было подвергнуто разным преобразованиям градации на основе ввода выбора посредством клавиатуры 110 и мыши 111.
Таким образом, поскольку процесс получения функции преобразования градации выполняется параллельно с обработкой формирования большого изображения, варианты функции преобразования градации могут быть представлены пользователю быстрее, чем в том случае, когда получение функции преобразования градации начинается после того, как сформировано большое изображение.
В пятом иллюстративном варианте воплощения настоящего изобретения, в отличие от упомянутых выше иллюстративных вариантов воплощения, параметр преобразования градации получается на основе размера значения пикселя интересующей области в частичном изображении без использования информации об области съемки.
Теперь со ссылкой на Фиг.6 будет описана конфигурация устройства 600 обработки изображений. Отличие от упомянутых выше иллюстративных вариантов воплощения состоит в том, что устройство 600 обработки изображений имеет блок 608 спецификации интересующих областей и блок 609 определения.
Далее со ссылкой на Фиг.7 будет описана последовательность операций обработки, выполняемой системой 100 формирования изображений с помощью излучения.
На этапе S701 источник 101 излучения испускает излучение на основе внешней команды. Датчик 103 обнаруживает излучение, которое прошло через объект 102, и формирует изображение объекта с помощью излучения.
На этапе S702 блок 601 получения частичных изображений устройства 600 обработки изображений получает изображение с помощью излучения от датчика 103 через интерфейс (I/F) 112. Полученное изображение посредством блока 611 управления отправляется блоку 602 формирования большого изображения и также сохраняется в блоке 612 памяти.
На этапе S703 блок 603 коррекции изображения выполняет процесс коррекции, в котором значение пикселя каждого изображения сдвигается таким образом, чтобы уровни значений пикселей для общих областей в каждом изображении совпадали. Поскольку посредством этой обработки устраняются различия уровней значений пикселей в каждом изображении, значения пикселей в областях, которые должны иметь одинаковое значение пикселя во всем большом изображении, могут быть сделаны примерно одинаковыми посредством выполняемой далее обработки объединения общих областей. Кроме того, поскольку в процессе объединения целью обработки являются только наложенные области, имеется преимущество, состоящее в том, что количественные значения признаков, полученные из каждого частичного изображения после этой коррекции значения пикселя, но перед процессом объединения, представляют собой значения, которые обычно не изменяются от получения из большого изображения после обработки объединения.
На этапе S704 блок 611 управления начинает параллельно процесс объединения, выполняемый блоком 604 объединения изображения, и процесс спецификации интересующей области, выполняемый блоком 608 спецификации интересующих областей. Эти процессы могут начаться одновременно или немного раньше или позже друг друга.
На этапе S705 блок 604 объединения изображения объединяет области, общие для множества скорректированных изображений. Параллельно с этим процессом на этапе S706 блок 608 спецификации интересующих областей специфицирует интересующую область.
На этапе S707 блок 609 определения вычисляет значение, указывающее ширину значений пикселей в интересующей области. В настоящем иллюстративном варианте воплощения блок 609 определения извлекает минимальное значение пикселя и максимальное значение пикселя в интересующей области, вычисляет разность между этими значениями и берет эту разность в качестве ширины значений пикселей.
На этапе S708 блок 609 определения определяет, включено ли значение, указывающее ширину значений пикселей, в предопределенный диапазон. Этот предопределенный диапазон установлен блоком 611 управления как диапазон от 0 до порога, который предварительно сохранен в блоке 612 памяти. Если блоком 608 спецификации интересующих областей определено, что значение включено в предопределенный диапазон ("НЕТ" на этапе S708), процесс переходит на этап S709. На этапе S709 блок 608 спецификации интересующих областей устанавливает все изображение в качестве области, которая будет выделена, и получает функцию для преобразования градации области, установленную блоком 610 получения функции.
С другой стороны, если на этапе S708 блоком 608 спецификации интересующих областей определено, что значение ширины значений пикселей превышает предопределенный диапазон ("ДА" на этапе S708), процесс переходит на этап S710. На этапе S710 блок 608 спецификации интересующих областей делит изображение на множество областей. Этот процесс выполняется посредством установки количества областей для разделения посредством обращения к таблице для установления привязки между значением ширины значений пикселей и количеством областей. Эта таблица хранится в блоке 612 памяти. В качестве альтернативы, этот процесс может быть выполнен посредством определения ширины значений пикселей, которые могут быть выделены посредством каждого преобразования градации, и делением изображения на области, которые вписываются в пределы той ширины. Затем на этапе S710 блок 610 получения функции получает функцию для преобразования градации, соответствующую каждой области.
Если имеется три или более областей, установленных блоком 608 спецификации интересующих областей, области, имеющие сходное распределение значений пикселей, могут быть сгруппированы вместе, как в четвертом иллюстративном варианте воплощения, и преобразование градации может быть выполнено для каждой группы. В этом случае блок 608 спецификации интересующих областей функционирует как блок групповой обработки, который группирует вместе области, имеющие сходные распределения значений пикселей. Это группирование может быть выполнено с использованием известной методики кластеризации. Следовательно, градация интересующей области может быть подходящим образом преобразована при предотвращении сложности, которая возникает, когда преобразованные изображения формируются индивидуально для каждого преобразования градации. С другой стороны, параметр для индивидуального преобразования градации областей может быть получен без выполнения группирования. В этом случае каждая область может быть представлена вниманию диагноста посредством индивидуального формирования преобразованного изображения для каждой области.
На этапе S711 блок 605 преобразования градации преобразовывает градацию изображения на основе полученной функции преобразования градации. Если на этапе S710 получено множество функций преобразования градации, количество полученных изображений, имеющих преобразованную градацию, является таким же, как количество функций. Процесс применения этих функций к большому изображению может быть выполнен на основе получения функции посредством блока 605 преобразования градации. В качестве альтернативы, система, которая удобна с точки зрения предотвращения выполнения ненужной обработки, может быть обеспечена посредством выполнения последовательного преобразования градации на основе ввода пользователя.
На этапе S712 устройство 606 вывода отображает это изображение, имеющее скорректированную градацию, на блоке 105 отображения. Диагност может выполнить диагностику, рассматривая отображенное изображение.
Таким образом, получение параметра, который будет использоваться при преобразовании градации, из множества изображений, которые были скорректированы блоком 603 коррекции изображения, позволяет получить параметр преобразования градации, который является примерно таким же, как при получении из большого изображения. Кроме того, поскольку изображение, служащее в качестве цели анализа, было разделено, нагрузка на процесс анализа не так велика, как при анализе единственного изображения. Кроме того, выполнение обработки объединения изображения параллельно с получением параметра преобразования градации позволяет сократить продолжительность обработки. Следовательно, большое изображение, имеющее интересующую область, чья градация была подходящим образом преобразована, может быть быстрее выдано после съемки, и при этом сокращается продолжительность обработки.
Кроме того, градация также может быть преобразована посредством удаления области за пределами объекта и областей в объекте, которые являются менее важными, посредством задания интересующей области и разделения этой области по меньшей мере на одну область. Кроме того, градация также может быть преобразована для выделения области, на которую диагност должен обратить внимание. В частности, когда ширина значений пикселей интересующей области является большой, поскольку изображение формируется после того, как интересующая область разделена на множество областей и подвергнута процессу выделения, может быть сформировано изображение, которое имеет выделенную интересующую область без вреда для баланса градации всего изображения. Кроме того, может быть реализована градация, которая более близко отражает различия в объекте, чем при использовании информации об области съемки.
Посредством выполнения обработки, описанной в первом, втором и третьем иллюстративных вариантах воплощения, на основе информации о значении пикселя интересующей области без использования информации об области съемки, может быть достигнута подходящая градация, которая отражает индивидуальные отличия каждого объекта. Напротив, такая обработка также может быть выполнена с использованием табличной информации, относящейся к области съемки. В этом случае может быть реализована устойчивая градация на основе области. Кроме того, информация об области съемки и информация о значении пикселя интересующей области могут использоваться вместе.
В соответствии с упомянутыми выше иллюстративными вариантами воплощения посредством получения количественных значений признаков из частичных изображений и получения функции преобразования градации объединенного изображения время, требуемое для обработки анализа, может быть уменьшено по сравнению со случаем, когда анализируется все изображение с большим размером. Таким образом, могут быть реализованы и хорошая точность, и быстрая обработка, несмотря на то, что имеются ограничения по времени, пока не будет отображено снимаемое изображение. Кроме того, посредством объединения количественных значений признаков частичных изображений на основе области съемки могут быть достигнуты точность и продолжительность обработки, сопоставимые с анализом всего изображения. Кроме того, поскольку область съемки связана со способом объединения, очень точное преобразование градации может быть получено в короткое время только при наличии спецификации области съемки пользователем.
Кроме того, посредством параллельного выполнения обработки объединения частичных изображений и обработки анализа частичных изображений для получения преобразования градации продолжительность обработки может быть сокращена. Поскольку обработка объединения включает в себя обработку анализа изображений, нагрузка на процесс коррекции уровней значений пикселей среди частичных изображений и обработки позиционирования пикселей является высокой. Кроме того, этот процесс занимает время. С точки зрения предотвращения неправильной диагностики при ручном выполнении коррекции уровня значения пикселей и обработки позиционирования для улучшения точности требуется больше времени, чем при выполнении только автоматической обработки. С другой стороны, поскольку процесс анализа для получения характеристики преобразования градации также требует анализа изображения, процесс занимает время. Даже если характеристика обработки могла бы быть установлена вручную без необходимости анализа изображения, это все равно занимает такое же время, как при автоматической обработке. В настоящем иллюстративном варианте воплощения посредством параллельного выполнения трудоемкой обработки объединения и обработки получения характеристики градации, временная задержка, до тех пор пока после съемки не будет отображено большое изображение, может быть в значительной степени уменьшена. Кроме того, каждый раз, когда снято частичное изображение объекта, процесс анализа снятых частичных изображений может выполняться, пока снимается следующее частичное изображение. При съемке частичных изображений, поскольку процесс перемещения рентгеновской трубки и датчика с плоской панелью занимает время, посредством выполнения обработки анализа параллельно с разбитой на фрагменты съемкой время задержки отображения может быть очень сокращено.
Градация объединенного изображения установлена подходящим образом для диагностики посредством использования описанного выше обработки для получения характеристики преобразования градации объединенного изображения для изображения с помощью излучения и рентгеновского изображения. В частности, поскольку рентгеновские изображения отображаются в монохромном режиме, использование изображения, которое имеет подходящим образом скорректированную градацию, позволяет диагносту эффективно выполнять диагностику.
В описанных выше иллюстративных вариантах воплощения количественные значения признаков получаются посредством анализа частичных изображений, значения пикселей которых подверглись коррекции со сдвигом посредством блока 203 коррекции изображения. Однако процесс получения параметра преобразования градации и процесс коррекции со сдвигом могут быть выполнены параллельно. В дополнение к значению пикселя количественных значений признака, полученных посредством блока 208 получения количественных значений признаков, блок 203 коррекции изображения также может использовать величину сдвига значения пикселя частичных изображений при получении функции преобразования градации, выполняемом посредством блока 209 получения характеристики.
Преобразование градации не обязательно должно выполняться на основе функции, и также может использоваться поисковая таблица для преобразования градации. В этом случае блок 209 получения характеристики получает коэффициент для преобразования каждого частичного изображения в большом изображении, а не параметр для определения функциональной формы. Кроме того, характеристика обработки преобразования градации также может быть определена посредством фиксации формы кривой преобразования градации и сдвига кривой на основе количественных значений признаков большого изображения. Например, смещение может быть выполнено посредством использования значения пикселя интересующей области в качестве контрольного значения.
Настоящее изобретение может быть реализовано как система обработки изображений, в которой обработка, выполняемая устройством обработки изображений, распределена по множеству устройств. Настоящее изобретение также может быть реализовано посредством распределения обработки, организованной как единый функциональный блок, по множеству функциональных блоков. Кроме того, настоящее изобретение может быть реализовано посредством устройства отображения изображений, которое включает в себя функции устройства обработки изображений и устройства отображения в описанных выше иллюстративных вариантах воплощения в устройстве отображения изображений или датчике. В качестве альтернативы, настоящее изобретение может быть реализовано посредством установки обработки, организованной как единый функциональный блок, в качестве одной или множества аппаратных схем.
Настоящее изобретение также включает в себя случаи, в которых, например, операционная система (OS) и т.п., выполняемая на электронном вычислительном устройстве, выполняет часть фактической обработки или всю фактическую обработку, и из этой обработки реализуются функции описанных выше иллюстративных вариантов воплощения. Кроме того, в компьютер может быть включено множество центральных процессоров. В таком случае настоящее изобретение может быть реализовано посредством распределения по множеству центральных процессоров. Кроме того, в этом случае сам программный код, считанный с носителя данных, реализует функции иллюстративных вариантов воплощения, поэтому носитель данных, который хранит эту программу или программный код, составляет настоящее изобретение.
Приведенное выше описание иллюстративных вариантов воплощения представляет собой пример устройства обработки изображений. Настоящее изобретение не ограничено этим описанием.
Аспекты настоящего изобретения также могут быть реализованы посредством компьютера системы или устройства (или таких устройств, как центральный процессор (CPU) или микропроцессор (MPU)), которое считывает и выполняет программу, записанную в запоминающем устройстве, для выполнения функций описанного выше варианта (вариантов) воплощения, и посредством способа, этапы которого выполняются компьютером системы или устройством, например, посредством считывания и исполнения программы, записанной в запоминающем устройстве, для выполнения функций описанного выше варианта (вариантов) воплощения. С этой целью программа предоставляется компьютеру, например, через сеть или с носителя записи различных типов, служащего в качестве запоминающего устройства (например, машиночитаемого носителя).
Хотя настоящее изобретение было описано в отношении иллюстративных вариантов воплощения, следует понимать, что изобретение не ограничивается раскрытыми иллюстративными вариантами воплощения. Объем следующей формулы изобретения должен получить самую широкую интерпретацию для охвата всех модификаций и эквивалентных структур и функций.
Изобретение относится к преобразованию градации изображения. Технический результат - сокращение времени, требуемого при формировании изображения с помощью излучения для получения обратного изображения с преобразованной градацией. Устройство обработки изображений содержит блок получения изображений, принимающий множество частичных изображений, полученных посредством съемки каждого из множества диапазонов съемки, на которые разделена область съемки объекта; блок формирования, формирующий изображение посредством объединения множества частичных изображений, полученных посредством съемки объекта; блок получения количественных значений признаков, получающий количественное значение признака одного из частичных изображений; блок получения характеристики, получающий характеристику обработки преобразования градации на основе количественного значения признака и области съемки; блок преобразования, преобразующий на основе характеристики градацию изображения области съемки объекта, полученного посредством объединения частичных изображений; блок управления, управляющий блоком формирования и блоком получения характеристики, причем управление осуществляется так, что процессы блока получения количественных значений признаков и блока получения характеристики выполняются параллельно с процессом блока формирования. 5 н. и 11 з.п. ф-лы, 7 ил.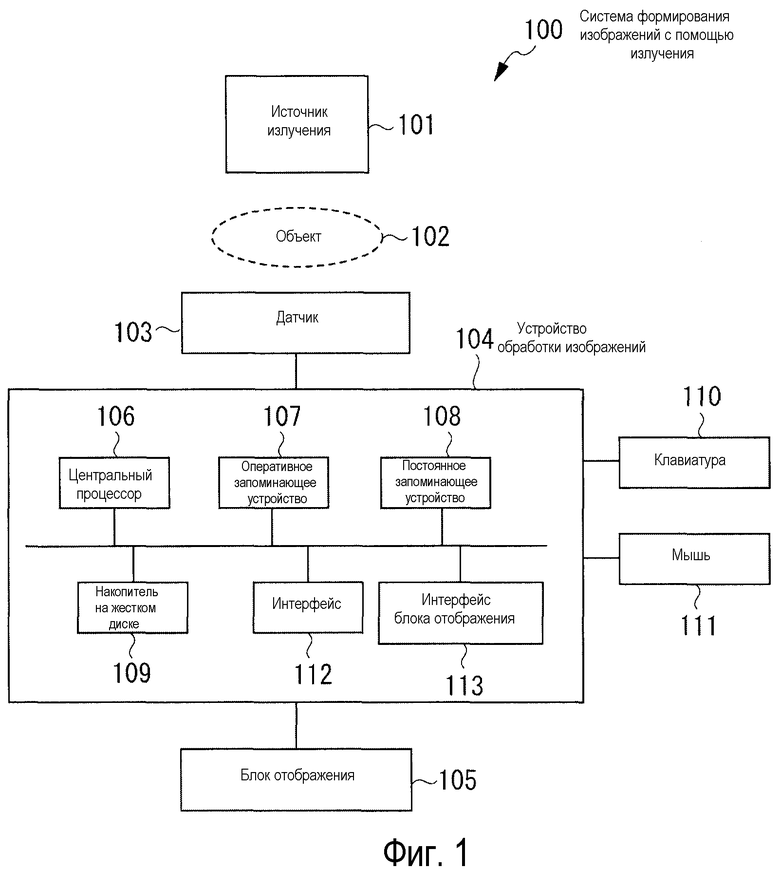
1. Устройство обработки изображений, содержащее:
средство получения изображений, выполненное с возможностью получать множество частичных изображений, полученных посредством съемки каждого из множества диапазонов съемки, на которые разделена область съемки объекта; при этом устройство обработки изображений отличается тем, что дополнительно содержит:
средство формирования, выполненное с возможностью формировать изображение посредством объединения множества частичных изображений, полученных посредством съемки объекта;
средство получения количественных значений признаков, выполненное с возможностью получать количественное значение признака по меньшей мере одного из частичных изображений;
средство получения характеристики, выполненное с возможностью получать характеристику обработки преобразования градации на основе количественного значения признака и области съемки;
средство преобразования, выполненное с возможностью преобразовывать на основе характеристики обработки преобразования градации градацию сформированного изображения; и
средство управления, выполненное с возможностью управления средством формирования и по меньшей мере одним из средства получения количественных значений признаков и средства получения характеристики,
причем средство управления осуществляет управление так, что процесс по меньшей мере одного из средства получения количественных значений признаков и средства получения характеристики выполняется параллельно с процессом средства формирования.
2. Устройство обработки изображений по п.1, дополнительно содержащее средство определения, выполненное с возможностью определять в соответствии с областью съемки количественное значение признака, полученное из каждого частичного изображения, и способ получения характеристики обработки преобразования градации из количественного значения признака.
3. Устройство обработки изображений по п.1, дополнительно содержащее средство определения, выполненное с возможностью определять, из какого частичного изображения значение пикселя интересующей области в объекте получено в качестве количественного значения признака.
4. Устройство обработки изображений по п.1, в котором средство определения выполнено с возможностью определять способ, который использует среднее значение или срединное значение значений пикселей интересующей области в объекте, полученном из множества частичных изображений.
5. Устройство обработки изображений по п.1, в котором средство получения количественных значений признаков выполнено с возможностью получать количественное значение признака из области частичного изображения, которая не накладывается на другие частичные изображения.
6. Устройство обработки изображений по п.1, дополнительно содержащее средство коррекции, выполненное с возможностью сдвигать значение пикселя по меньшей мере одного из частичных изображений и приблизительно выравнивать значение пикселя, представляющее область, общую для множества частичных изображений,
причем средство получения характеристики выполнено с возможностью получать характеристику обработки преобразования градации на основе величины сдвига значения пикселя, сдвинутого средством коррекции, и частичного изображения.
7. Устройство обработки изображений по любому из пп.1-6, в котором средство получения характеристики выполнено с возможностью получать характеристику обработки преобразования градации, соответствующую каждому частичному изображению, и
при этом средство управления выполнено с возможностью отображать характеристику обработки преобразования градации как вариант с изображением, полученным посредством объединения частичных изображений, и
при этом средство управления выполнено с возможностью выполнять в соответствии с вводом для выбора характеристики обработки преобразования градации преобразование градации выбранной характеристики обработки над изображением, полученным посредством объединения частичных изображений, и отображать обработанное изображение.
8. Устройство обработки изображений по любому из пп.1-6, в котором средство получения количественных значений признака выполнено с возможностью получать в качестве количественного значения признака по меньшей мере одно из максимального значения пикселя, минимального значения пикселя и значения пикселя интересующей области объекта, показанного на частичных изображениях.
9. Устройство обработки изображений по любому из пп.1-6, в котором характеристика обработки преобразования градации представляет собой либо функцию, используемую при преобразовании градации, либо поисковую таблицу, используемую при преобразовании градации.
10. Устройство обработки изображений по любому из пп.1-6, в котором средство управления выполнено с возможностью управлять средством формирования, средством получения количественных значений признаков и средством получения характеристики, причем средство управления управляет средством получения количественных значений признаков и средством получения характеристики для выполнения процессов параллельно с формированием объединенного изображения средством формирования.
11. Устройство обработки изображений по любому из пп.1-6, дополнительно содержащее средство обработки, выполненное с возможностью в соответствии с шириной распределения значений пикселей для интересующей области в сформированном объединенном изображении разделять интересующую область на множество групп для выделения на основе одинакового преобразования градации, при этом средство получения характеристики выполнено с возможностью получать характеристику обработки преобразования градации, соответствующую каждой из групп.
12. Система формирования изображений с помощью излучения, содержащая:
устройство обработки изображений по п.1;
источник излучения, выполненный с возможностью испускать излучение;
датчик, выполненный с возможностью обнаруживать излучение, испускаемое из источника излучения и проходящее через объект, и преобразовывать обнаруженное излучение в электрический сигнал, представляющий изображение объекта; и
средство отображения, выполненное с возможностью отображать преобразованное изображение.
13. Способ обработки изображений, содержащий этапы, на которых:
получают множество частичных изображений, полученных посредством съемки каждого из множества диапазонов съемки, на которые разделена область съемки объекта;
сдвигают значение пикселя по меньшей мере одного из частичных изображений среди множества частичных изображений и приблизительно выравнивают тенденцию значений пикселей в области, общей для множества частичных изображений;
формируют изображение посредством объединения множества частичных изображений, причем значения пикселей по меньшей мере одного из частичных изображений сдвинуты и выровнены;
при этом способ отличается тем, что дополнительно содержит этапы, на которых:
получают количественное значение признака по меньшей мере одного из частичных изображений;
получают характеристику обработки преобразования градации на основе количественного значения признака и области съемки; и
преобразовывают на основе характеристики обработки преобразования градации градацию изображения области съемки объекта, полученного посредством объединения частичных изображений,
при этом характеристику обработки преобразования градации получают при формировании объединенного изображения.
14. Машиночитаемый носитель данных, хранящий программу, которая при ее исполнении на устройстве предписывает устройству действовать в качестве устройства обработки изображений по п.1.
15. Устройство обработки изображений, содержащее:
средство получения изображений, выполненное с возможностью получать множество частичных изображений, полученных посредством съемки каждого из множества диапазонов съемки, на которые разделена область съемки объекта;
средство изменения, выполненное с возможностью изменять значения пикселей по меньшей мере одного из частичных изображений, так чтобы значения пикселей по меньшей мере двух из частичных изображений, которые частично накладываются друг на друга, приблизительно совпадали;
средство выравнивания, выполненное с возможностью выравнивать частичные изображения, причем значения пикселей по меньшей мере одного из частичных изображений изменены средством изменения;
средство получения количественных значений признаков, выполненное с возможностью получать количественное значение признака по меньшей мере одного из частичных изображений;
средство получения характеристики, выполненное с возможностью получать характеристику обработки преобразования градации на основе количественного значения признака и области съемки; и
средство преобразования, выполненное с возможностью преобразовывать на основе характеристики обработки преобразования градации градацию сформированного изображения,
при этом устройство обработки изображений отличается тем, что упомянутое по меньшей мере одно из частичных изображений, включающее измененные значения пикселей, принимается как средством выравнивания, так и средством получения количественных значений признаков, так что процессы средства выравнивания и средства получения количественных значений признаков выполняются параллельно.
16. Устройство обработки изображений по п.15, дополнительно содержащее средство управления, выполненное с возможностью управлять средством выравнивания и средством получения количественных значений признаков, так чтобы процессы средства выравнивания и средства получения количественных значений признаков выполнялись параллельно.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ слоевой разработки мощных пологих угольных пластов | 1986 |
|
SU1411472A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ОБЛАСТЕЙ ОБЪЕКТА И ФОНА НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2006 |
|
RU2336655C1 |

