Настоящее изобретение относится к системе датчиков расхода. В частности, но не исключительно, настоящее изобретение относится к системе датчиков расхода для системы генерации аэрозолей. Настоящее изобретение находит конкретное применение в качестве системы датчиков расхода для курительной системы, например, электрически нагреваемой курительной системы.
Несколько документов предшествующего уровня техники, например, US-A-5060671, US-A-5388594, US-A-5505214, US-A-5591368, WO-A-2004/043175, EP-A-0358002, EP-A-0295122, EP-A-1618803, EP-A-1736065 и WO-A-2007/131449, раскрывают электрические управляемые курительные системы, имеющие некоторое количество преимуществ. Одним из преимуществ является то, что они значительно уменьшают боковой дымовой поток, между тем позволяя курильщику по его желанию временно прекращать и возобновлять курение.
Системы генерации аэрозолей предшествующего уровня техники могут включать формирующий аэрозоль субстрат, один или более нагревательных элементов для нагрева субстрата для формирования аэрозоля и источник электропитания для подачи электропитания одному или более нагревательным элементам. Системы генерации аэрозолей предшествующего уровня техники могут обеспечивать энергетический импульс для нагревателя для обеспечения температурного диапазона, требуемого для работы, и для освобождения летучих соединений для каждой затяжки. Многие системы генерации аэрозолей предшествующего уровня техники включают в себя датчик расхода для восприятия потока текучих сред (например, воздушного потока или потока аэрозоля) в системе генерации аэрозолей. Датчик может играть важную роль в управлении доставкой аэрозоля. Когда датчик расхода обнаруживает поток воздуха, указывающий на всасывание, вызванное затяжкой пользователя, активируется механизм аэролизации, который может включать в себя нагревательный элемент или элементы, или пульверизатор любого типа, для обеспечения аэрозоля для этой затяжки. Датчик расхода может быть пассивным (т.е. механическим) датчиком или активным датчиком.
Пассивные датчики обычно включают в себя смещающуюся мембрану и электрический контакт. Поток воздуха, созданный пользователем при всасывании, смещает мембрану, так что она касается электрического контакта, который активирует механизм аэролизации. Пока поток воздуха достаточно силен, чтобы сохранить смещение мембраны, механизм аэролизации будет оставаться активированным. Преимущества пассивного датчика включают в себя простоту конструкции, следовательно, низкую стоимость и незначительное энергопотребление. Активные датчики часто основаны на потерях тепла в результате потока текучей среды. Такой тип активного датчика часто называют термоанемометром. Датчик содержит резистор, который нагревается до высокой температуры. Когда поток охлаждает резистор, последующее уменьшение температуры при заданной мощности или увеличение мощности для поддержания заданной температуры указывает скорость потока воздуха. Резистор обычно является резистором, основанным на кремниевых микроэлектромеханических системах (MEMS). Преимущества активного датчика включают в себя тот факт, что потери тепла пропорциональны скорости потока, поэтому датчик может быть использован для обеспечения информации о характеристиках затяжки. Дополнительно, датчик не так подвержен механическим ударам во время транспортировки и использования.
Поскольку датчики расхода, обеспеченные в системах генерации аэрозолей предшествующего уровня техники, включая вышеописанные, имеют определенное количество недостатков, задачей изобретения является обеспечение улучшенной системы датчиков расхода, подходящей для системы генерации аэрозолей.
Согласно первому аспекту изобретения обеспечивается система датчиков расхода для восприятия потока текучей среды, указывающего на затяжку в системе генерации аэрозолей, причем система датчиков выполнена с возможностью работы в первом режиме, в котором затяжка не ожидается или не обнаружена, и во втором режиме, в котором затяжка ожидается или обнаружена, и содержащая: чувствительную схему, содержащую чувствительный резистор и выход напряжения, причем чувствительный резистор выполнен с возможностью обнаружения потока текучей среды на основе изменения сопротивления, причем чувствительная схема выполнена так, что изменение сопротивления чувствительного резистора вызывает изменение в выходе напряжения; и генератор сигналов, выполненный с возможностью подачи импульсного управляющего сигнала S1 на чувствительную схему для питания чувствительной схемы, так что чувствительная схема запитывается, когда импульсный управляющий сигнал S1 является высоким, и не запитывается, когда импульсный управляющий сигнал S1 является низким, причем импульсный управляющий сигнал S1 имеет первую частоту f1 в первом режиме и второю частоту f2, которая выше, чем первая частота f1, во втором режиме.
Так как система датчиков включает чувствительный резистор, включенный в состав чувствительной схемы, которая имеет выходное напряжение, которое является разностным напряжением, чувствительность высока, и могут быть обнаружены малые изменения потока. Использование импульсного управляющего сигнала S1 означает, что чувствительная схема не получает электропитание постоянно, но питается только каждый раз, когда импульсный управляющий сигнал S1 является высоким, т.е. когда прямоугольный сигнал S1 равен 1, а не 0. Это значительно уменьшает энергопотребление. Система датчиков может быть постоянно активной, что означает, что нет необходимости в отдельном переключателе включено/отключено. Частоты f1 и f2 могут быть выбраны для обеспечения подходящей чувствительности и энергопотребления. Система датчиков может быть использована для получения качественной и количественной информации о затяжке.
Генератор сигналов для подачи импульсного управляющего сигнала предпочтительно содержит микроконтроллер, причем импульсный сигнал обеспечивается на одном выходе микроконтроллера. Если генератор сигналов содержит микроконтроллер, предпочтительно микроконтроллер программируют для управления значениями f1 и f2. В других вариантах воплощения генератор сигналов для подачи импульсного управляющего сигнала может быть программируемой электронной схемой любого типа.
Предпочтительно, система датчиков расхода дополнительно содержит источник тока, выполненный с возможностью подачи тока заданной величины через чувствительную схему, причем импульсный управляющий сигнал S1 подают на источник тока. Источник тока заданной величины позволяет использовать чувствительный резистор в чувствительной схеме при постоянном токе, что обеспечивает способ работы, имеющий наименьшее энергопотребление. Так как источник тока питается через импульсный управляющий сигнал S1, источник тока не получает электропитание постоянно, но питается только каждый раз, когда импульсный управляющий сигнал является высоким, что дополнительно снижает энергопотребление. Источник тока уменьшает нелинейность зависимости выхода напряжения чувствительной схемы от сопротивления чувствительного резистора. В предпочтительном варианте воплощения источник тока является температурно-компенсированным источником тока. Это предпочтительно, поскольку это исключает любые изменения выхода напряжения чувствительной схемы при изменении окружающей температуры. В одном варианте воплощения источник тока содержит источник напряжения, два транзистора в зеркальной конфигурации и входной резистор.
Предпочтительно, система датчиков расхода дополнительно содержит дифференциальный усилитель, выполненный с возможностью усиления выхода напряжения чувствительной схемы. Это предпочтительно, поскольку выход чувствительной схемы может составлять всего лишь несколько мВ. Дифференциальный усилитель предпочтительно имеет низкое энергопотребление и высокий коэффициент усиления.
Предпочтительно, дифференциальный усилитель может быть отключен, когда импульсный управляющий сигнал S1 является низким, и может быть включен, когда импульсный управляющий сигнал S1 является высоким. Это дополнительно снижает энергопотребление. Предпочтительно, выход дифференциального усилителя пропорционален выходу напряжения чувствительной схемы в диапазоне значений выхода напряжения чувствительной схемы, и насыщается, когда выход напряжения чувствительной схемы ниже или выше диапазона. То есть, когда выход напряжения чувствительной схемы ниже диапазона, выход дифференциального усилителя имеет постоянное значение; когда выход напряжения чувствительной схемы выше диапазона, выход дифференциального усилителя имеет постоянное значение; и когда выход напряжения чувствительной схемы находится в диапазоне, имеет место линейная зависимость между выходом чувствительной схемы и выходом дифференциального усилителя.
Предпочтительно, система датчиков работает во втором режиме в течение заданного периода времени после обнаружения изменения в выходе напряжения чувствительной схемы, указывающего на затяжку, и работает в первом режиме в все другое время. Таким образом, при обнаружении затяжки или в другой момент времени импульсный управляющий сигнал S1 изменяется с первой частоты f1 на более высокую вторую частоту f2. Это означает, что максимальное время для затяжки, когда датчик работает в первом режиме, составляет  секунд. f1 может быть выбрана для обеспечения подходящего баланса между энергопотреблением и чувствительностью в первом режиме. Если затяжка обнаружена при работе датчика во втором режиме, максимальное время для затяжки составляет
секунд. f1 может быть выбрана для обеспечения подходящего баланса между энергопотреблением и чувствительностью в первом режиме. Если затяжка обнаружена при работе датчика во втором режиме, максимальное время для затяжки составляет  секунд. f2 может быть выбрана для обеспечения подходящего баланса между энергопотреблением и чувствительностью во втором режиме. В одном варианте воплощения первая частота f1 равна 3 Гц, а вторая частота f2 равна 22 Гц.
секунд. f2 может быть выбрана для обеспечения подходящего баланса между энергопотреблением и чувствительностью во втором режиме. В одном варианте воплощения первая частота f1 равна 3 Гц, а вторая частота f2 равна 22 Гц.
Предпочтительно, заданный период времени, в течение которого датчик работает во втором режиме, после обнаружения затяжки, равен среднему времени между затяжками для конкретного пользователя. Дополнительно, заданный период времени может быть адаптивным, чтобы он непрерывно настраивался, основываясь на скользящем среднем предыдущих периодов времени между затяжками. Альтернативно, заданный период времени может иметь фиксированное значение.
Если средство для подачи импульсного управляющего сигнала S1 содержит микроконтроллер, предпочтительно, выход напряжения чувствительной схемы обеспечивают на вход микроконтроллера. Это можно осуществить посредством дифференциального усилителя. Затем, в одном варианте воплощения, когда ввод в микроконтроллер указывает обнаружение затяжки, микроконтроллер может изменить импульсный управляющий сигнал S1 на своем выходе, с первой частоты f1 на вторую частоту f2.
Предпочтительно, сигнал S2 подают на другие компоненты системы генерации аэрозолей, причем сигнал S2 является высоким, когда выход напряжения чувствительной схемы указывает обнаружение затяжки, и сигнал S2 является низким, когда выход напряжения чувствительной схемы указывает, что затяжка не обнаружена. Если средство для подачи импульсного управляющего сигнала S1 содержит микроконтроллер, предпочтительно сигнал S2 обеспечивают на дополнительном выходе микроконтроллера. Предпочтительно, выход напряжения чувствительной схемы обеспечивают на входе микроконтроллера. Затем, когда ввод в микроконтроллер указывает обнаружение затяжки, микроконтроллер приспособлен выводить высокий сигнал S2, а когда ввод в микроконтроллер указывает, что затяжка не обнаружена, микроконтроллер приспособлен выводить низкий сигнал S2. Другие компоненты системы генерации аэрозолей могут включать в себя, но не ограничиваясь, механизм аэролизации (который может быть механизмом парообразования, средством парообразования, механизмом распыления или средством распыления), пульверизатор, нагревательный элемент и индикатор затяжки.
Система датчиков расхода может дополнительно содержать средство для регулировки чувствительности системы датчиков, причем средство для регулировки чувствительности содержат одно или более из: переменного резистора в чувствительной схеме; саморегулирующейся схемы смещения; и генератора сигналов для подачи импульсного калибровочного сигнала SC на чувствительную схему.
Переменный резистор допускает регулировку для изменения чувствительности системы датчиков. Предпочтительно, чувствительный резистор имеет диапазон рабочих сопротивлений (диапазон, имеющий фиксированную величину), и регулировка переменного резистора изменяет положение диапазона рабочих сопротивлений чувствительного резистора, т.е. нижнюю точку диапазона рабочих сопротивлений. Это в свою очередь влияет на выход напряжения чувствительной схемы в отсутствие затяжки, что влияет на чувствительность системы. В предпочтительном варианте воплощения переменный резистор регулируют таким образом, что диапазон рабочих сопротивлений чувствительного резистора имеет нижнюю точку около или чуть ниже нуля. Это обеспечивает наилучшую чувствительность.
Саморегулирующаяся схема смещения может быть использована для изменения чувствительности системы датчиков. Схема смещения может быть образована соединением выхода микроконтроллера с неинвертирующим входом дифференциального усилителя и соединением выхода дифференциального усилителя с входом микроконтроллера. Микроконтроллер может наблюдать за выходом VOUT дифференциального усилителя и подавать напряжение на неинвертирующий вход до тех пор, пока VOUT не равно 0.
Импульсный калибровочный сигнал SC используется для регулировки чувствительности системы датчиков. Предпочтительно, на каждом импульсе калибровочного сигнала SC регулируется ширина каждого импульса импульсного управляющего сигнала S1. Эта регулировка предпочтительно приспособлена для изменения пропорции каждого импульса сигнала S1, в течение которого может быть обнаружено изменение в выходе напряжения чувствительной схемы, указывающее на затяжку. Импульсный калибровочный сигнал SC может быть выполнен таким образом, что он имеет импульс на каждый x-й импульс импульсного управляющего сигнала S1, работающего или на первой частоте или на второй частоте. x является любым подходящим значением, например, 1000. Альтернативно, импульсный калибровочный сигнал Sc может быть выполнен таким образом, что он имеет импульс каждый раз, когда импульсный управляющий сигнал S1 переключается с первой частоты на вторую частоту, или в другие соответствующие моменты времени. Если средство для подачи импульсного управляющего сигнала S1 содержит микроконтроллер, предпочтительно импульсный калибровочный сигнал Sc обеспечивают на выходе микроконтроллера.
Чувствительным резистором может быть резистор, основанный на кремниевой MEMS. В другом варианте воплощения чувствительный резистор может составлять часть датчика, основанного на кремниевой MEMS. Датчик может дополнительно содержать эталонный резистор.
Чувствительная схема может содержать мост Уитстона, имеющий первую ветвь и вторую ветвь, и причем выходное напряжение является разницей между напряжением в первой ветви и напряжением во второй ветви.
Согласно второму аспекту изобретения обеспечивается система генерации аэрозолей для приема формирующего аэрозоль субстрата, причем система включает в себя систему датчиков расхода для восприятия потока текучих сред в системе генерации аэрозолей, указывающего на затяжку, причем система датчиков расхода соответствует первому аспекту изобретения.
Система генерации аэрозолей может быть электрически нагреваемой системой генерации аэрозолей. Система генерации аэрозолей может быть курительной системой. Предпочтительно, система является портативной. Предпочтительно, система содержит корпус для приема формирующего аэрозоль субстрата и сконструирована быть захватываемой пользователем.
Формирующий аэрозоль субстрат может содержать содержащий табак материал (вещество), содержащий летучие соединения с ароматом табака, которые высвобождаются из субстрата при нагреве. Формирующий аэрозоль субстрат может дополнительно содержать формирователь аэрозоля. Формирующий аэрозоль субстрат может быть твердым субстратом, жидким субстратом, газообразным субстратом или комбинацией из двух или более из твердого, жидкого или газообразного.
Если формирующий аэрозоль субстрат является жидким субстратом, система генерации аэрозолей может содержать механизм аэролизации в контакте с источником жидкого субстрата. Механизм аэролизации может содержать, по меньшей мере, один нагревательный элемент для нагрева субстрата для формирования аэрозоля; причем нагревательный элемент может быть активирован, когда система генерации аэрозолей обнаруживает поток текучей среды, указывающий на затяжку. Альтернативно, нагревательный элемент может быть отдельным от механизма аэролизации, но при этом сообщается с ним. По меньшей мере, один нагревательный элемент может содержать единственный нагревательный элемент или более одного нагревательного элемента. Нагревательный элемент или элементы могут иметь любую подходящую форму для наиболее эффективного нагрева формирующего аэрозоль субстрата. Нагревательный элемент предпочтительно содержит электрически резистивный материал.
Механизм аэролизации может включать в себя один или более электромеханических элементов, таких как пьезоэлектрические элементы. Механизм аэролизации может включать в себя элементы, которые используют электростатические, электромагнитные или пневматические эффекты. Система генерации аэрозолей может содержать камеру конденсации.
В процессе использования субстрат может полностью содержаться внутри системы генерации аэрозолей. В таком случае пользователь может затягиваться из мундштука системы генерации аэрозолей. Альтернативно, в процессе использования субстрат может частично содержаться внутри системы генерации аэрозолей. В таком случае субстрат может составлять часть отдельной детали, и пользователь может затягиваться непосредственно из отдельной детали.
Система генерации аэрозолей может содержать источник электропитания. Источником электропитания может быть литиево-ионная батарея или один из ее вариантов, например, литиево-ионная полимерная батарея или никель-металл-гибридная батарея или никель-кадмиевая батарея, суперконденсатор или топливный элемент. В альтернативном варианте воплощения система генерации аэрозолей может содержать схему, заряжаемую внешним зарядным участком и приспособленную обеспечивать электропитание для заданного количества затяжек.
Согласно третьему аспекту изобретения обеспечивается способ управления системой датчиков расхода для восприятия потока текучих сред, указывающего на затяжку в системе генерации аэрозолей, причем система датчиков выполнена с возможностью работы в первом режиме, в котором затяжка не ожидается или не обнаружена, и во втором режиме, в котором затяжка ожидается или обнаружена, причем способ содержит этапы: подают импульсный управляющий сигнал S1 на чувствительную схему для подачи питания на чувствительную схему, так что чувствительная схема получает электропитание, когда импульсный управляющий сигнал S1 является высоким и не получает электропитание, когда импульсный управляющий сигнал S1 является низким, причем чувствительная схема включает в себя чувствительный резистор и выход напряжения, причем чувствительный резистор выполнен с возможностью обнаружения потока текучей среды на основе изменения сопротивления чувствительного резистора, причем чувствительная схема выполнена таким образом, что изменение сопротивления чувствительного резистора вызывает изменение в выходе напряжения; и переключают систему датчиков между первым и вторым режимами работы, причем импульсный управляющий сигнал S1 имеет первую частоту f1, в первом режиме, и имеет вторую частоту f2, которая выше, чем первая частота f1, во втором режиме.
Управление системой датчиков расхода с помощью импульсного управляющего сигнала S1 означает, что чувствительная схема не получает электропитание постоянно, но только когда S1 является высоким. Это значительно снижает энергопотребление, поскольку f1 и f2 могут быть выбраны для требуемой чувствительности.
В одном варианте воплощения этап переключения системы датчиков между первым и вторым режимами работы содержит переключение системы датчиков из первого режима, в котором импульсный управляющий сигнал S1 имеет первую частоту f1, во второй режим, в котором импульсный управляющий сигнал S1 имеет вторую частоту f2, при обнаружении затяжки. Затяжку обнаруживают посредством изменения в выходе напряжения чувствительной схемы. Альтернативно или дополнительно, этап переключения системы датчиков между первым и вторым режимами работы содержит переключение системы датчиков из первого режима, в котором импульсный управляющий сигнал S1 имеет первую частоту f1, во второй режим, в котором импульсный управляющий сигнал S1 имеет вторую частоту f2, когда ожидается затяжка, на основе привычек пользователя. Момент времени, в который ожидается затяжка, может быть предсказан на основе привычек пользователя. Например, система датчиков может быть переключена из первого режима во второй режим в одном или более случаях из: через заданный период времени после предшествующей затяжки и в заданный момент времени в течение дня. Заданный период времени может быть средним периодом времени между затяжками пользователя, и его можно таким образом адаптировать, чтобы он непрерывно регулировался на основе скользящего среднего времени между затяжками. Альтернативно, заданный период времени может иметь постоянное значение. Это предпочтительно, так как если система датчиков работает во втором режиме до затяжки, время отклика будет значительно короче.
Предпочтительно, способ содержит подачу импульсного управляющего сигнала S1 на второй частоте f2 в течение заданного периода времени после обнаружения изменения в выходе напряжения чувствительной схемы, указывающего затяжку, и подачу импульсного управляющего сигнала S1 на первой частоте f1 во все другое время.
Предпочтительно, способ дополнительно содержит этап подачи сигнала S2 на другие компоненты в системе генерации аэрозолей, причем сигнал S2 является высоким, когда выход напряжения чувствительной схемы указывает, что обнаружена затяжка, и сигнал S2 является низким, когда выход напряжения чувствительной схемы указывает, что затяжка не обнаружена. Сигнал S2 может быть использован для активации одного или более из: механизма аэролизации, пульверизатора, нагревательного элемента и индикатора затяжки.
Способ может дополнительно содержать этап регулировки чувствительности системы датчиков, содержащий одно или более из: периодической регулировки сопротивления переменного резистора в чувствительной схеме; обеспечение саморегулирующейся схемы смещения; и подачу импульсного калибровочного сигнала SC на чувствительную схему.
Способ может дополнительно содержать этап доставки аэрозоля пользователю в зависимости от характеристик затяжки, обнаруженной чувствительной схемой. Признаки, описанные в отношении одного аспекта изобретения, могут быть также применимы к другому аспекту изобретения.
Изобретение будет дополнительно описано, исключительно в качестве примера, со ссылкой на сопроводительные чертежи, на которых:
Фиг.1 показывает примерный вариант воплощения системы датчиков по изобретению;
Фиг.2а показывает сигнал GP2 по Фиг.1;
Фиг.2b показывает сигнал VOUT по Фиг.1 в отсутствие затяжки;
Фиг.2с показывает сигнал VOUT по Фиг.1 при обнаружении затяжки;
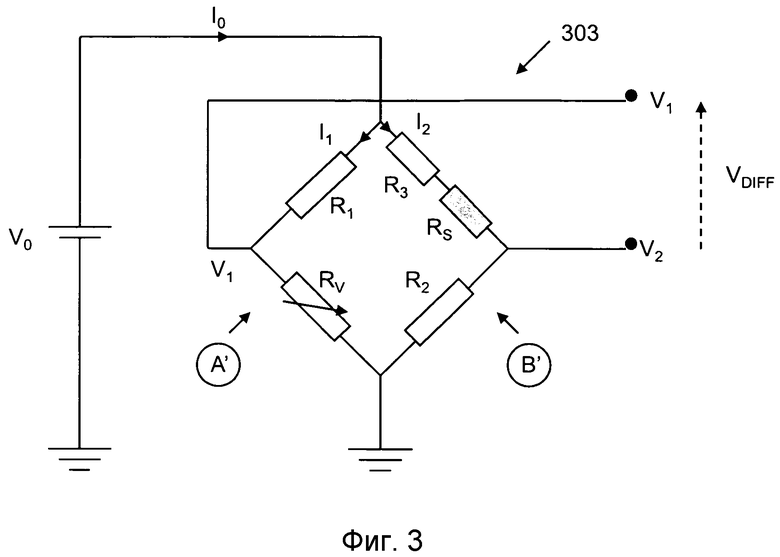
Фиг.3 показывает альтернативную схему размещения чувствительной схемы по Фиг.1, в виде моста для измерения сопротивления;
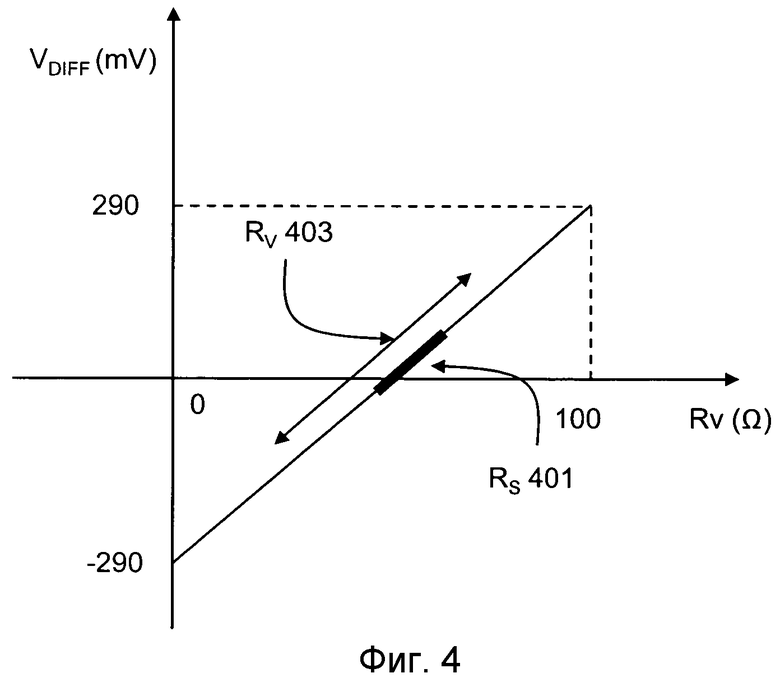
Фиг.4 показывает, каким образом может быть установлена заданная точка релаксации; и
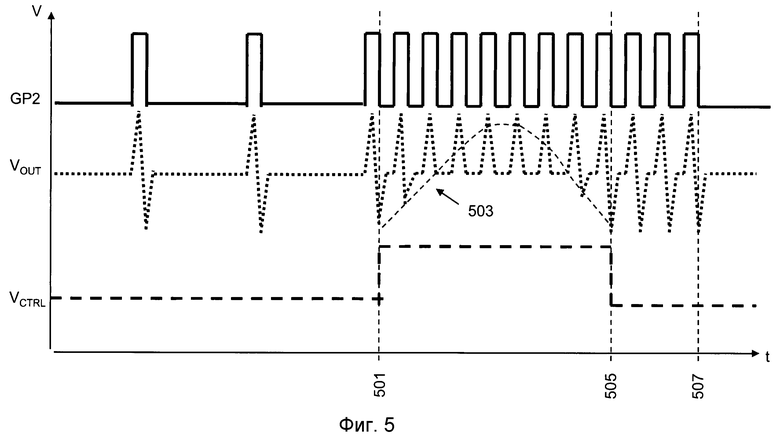
Фиг.5 показывает один способ работы системы датчиков по Фиг.1.
Подходящий датчик для использования в системе датчиков по настоящему изобретению может содержать кремниевую подложку, мембрану из нитрида кремния на подложке и два платиновых нагревательных элемента на мембране. Два нагревательных элемента являются резисторами, один действующий одновременно как привод и датчик, а другой как эталон. Такой датчик является предпочтительным, поскольку он обеспечивает быстрый отклик датчика. Разумеется, могли бы быть использованы другие подходящие датчики. Во время работы имеется изменение сопротивления чувствительного резистора вследствие охлаждения примыкающим потоком текучей среды. Это изменение сопротивления является следствием потерь тепла.
Чувствительный резистор может быть использован при постоянной температуре, в таком случае измеряют увеличенную требуемую энергию нагрева, и она обеспечивает индикацию потока текучей среды. Альтернативно, чувствительный резистор может быть использован при постоянной мощности нагрева, в случае чего пониженная температура обеспечивает индикацию потока текучей среды. Альтернативно, чувствительный резистор может быть использован с постоянным током, что будет описано ниже, со ссылкой на Фиг.1 и 3, в случае чего изменение равновесия чувствительной схемы обеспечивает индикацию потока текучей среды.
Фиг.1 показывает примерный вариант воплощения системы датчиков по изобретению. Система 101 датчиков по Фиг.1 включает чувствительную схему 103, источник тока заданной величины в виде токового зеркала 105, дифференциальный усилитель 107 и генератор сигналов для подачи импульсного управляющего сигнала S1 в виде микроконтроллера 109 и управляющего транзистора 111.
Система 101 датчиков по Фиг.1 включает чувствительную схему 103. Чувствительная схема 103 включает в себя резисторы R1, R4 и переменный резистор RV в левой ветви и резисторы R2, R3 и чувствительный резистор RS в правой ветви. Чувствительный резистор RS является чувствительным резистором датчика, такого как вышеописанный датчик или датчика другого подходящего типа. RV является регулируемым сопротивлением и может быть использован для установления заданной точки релаксации (например, в отсутствие потока воздуха в системе), что будет дополнительно обсуждаться ниже. Альтернативно, для установки заданной точки релаксации может быть использована саморегулирующаяся схема смещения. В данном варианте воплощения выход микроконтроллера может быть соединен с неинвертирующим входом дифференциального усилителя (не показан на Фиг.1) и VOUT дифференциального усилителя может быть соединен с входом микроконтроллера. Микроконтроллер может быть использован для мониторинга выхода VOUT дифференциального усилителя и подачи напряжения на неинвертирующий вход дифференциального усилителя до тех пор, пока VOUT не = 0.
Измеренное напряжение VDIFF является измерением разницы (в данном примере разницей между V2 в правой ветви B и V1 в левой ветви A). Когда чувствительная схема 103 находится в равновесии, отношение сопротивлений в левой ветви,  , равно отношению сопротивлений в правой ветви,
, равно отношению сопротивлений в правой ветви,  , что приводит в результате к VDIFF=V2-V1 равному нулю. Как только RS охлаждается потоком текучей среды, меняется сопротивление RS, что приводит к изменению напряжения в правой ветви B и ненулевому значению для VDIFF.
, что приводит в результате к VDIFF=V2-V1 равному нулю. Как только RS охлаждается потоком текучей среды, меняется сопротивление RS, что приводит к изменению напряжения в правой ветви B и ненулевому значению для VDIFF.
Можно легко показать, что для чувствительной схемы 103 по Фиг.1:
 (1)
(1)
если RV+R4=R1 и RS+R3=R2, то
Измерение разницы VDIFF обеспечивает индикацию потока текучей среды, который вызывает изменение сопротивления RS. Поскольку VDIFF является измерением разницы, могут быть проведены очень точные измерения, даже для малого изменения потока текучей среды и, следовательно, сопротивления. Конфигурация позволяет регистрировать такую информацию, как объем и интенсивность затяжки. Заметим из Уравнения (1), что VDIFF нелинейно зависит от чувствительного сопротивления RS.
В варианте воплощения по Фиг.1 источник тока заданной величины имеет вид токового зеркала 105, которое содержит два транзистора T1 и T2 в зеркальной конфигурации, плюс резистор RREF. Ток IM на T2 должен быть равен IREF на T1 (который также является током, проходящим через чувствительную схему 103). И:
VS=RREFIREF+VBE
Следовательно:
 (2)
(2)
Нелинейность в чувствительной схеме (см. Уравнения (1) и (2) выше) компенсируется токовым зеркалом. Это предпочтительно, так как обнаруживается, что в системе, нелинейность которой компенсируется таким образом, нелинейность в два раза меньше, чем нелинейность в системе, компенсируемая изменением напряжения. Таким образом, токовое зеркало 105 в варианте воплощения по Фиг.1 уменьшает нелинейность системы.
Токовое зеркало 105 может иметь любую подходящую конфигурацию. Токовое зеркало может быть помещено со стороны высокого напряжения чувствительной схемы 103, а не между чувствительной схемой и землей, как показано на Фиг.1. Вместо T1 и T2 могли бы быть использованы транзисторы любого подходящего типа, включая PNP транзисторы, NPN транзисторы и КМОП транзисторы. Также возможны альтернативные схемы размещения источника тока. Система датчиков должна корректно работать в соответствующем диапазоне температур, и токовое зеркало 105 компенсирует любое изменение температуры. Другие температурно-компенсированные источники тока также доступны. Если внешняя температура меняется, на выходное напряжение чувствительной схемы, VDIFF, будет влиять это изменение, что может привести к неточной работе или измерениям. T1 и T2 должны иметь одинаковые электрические характеристики и должны быть размещены близко друг к другу и одинаково монтированы для минимизации любой разницы температур между ними.
Обращаясь к конкретному размещению токового зеркала 105, с одной стороны, если имеет место разница температур между T1 и T2, так как два транзистора имеют одинаковый потенциал (VBE) через их переходы база-эмиттер, VBE остается постоянным. Это означает, что если два транзистора находится при различных температурах, ток через T1 отличается от тока через T2, чтобы поддерживать VBE. С другой стороны, если меняется внешняя температура так, что одинаково воздействует на T1 и T2, ток через оба транзистора меняется одинаково для поддержания VBE постоянным.
Система 101 датчиков также включает в себя дифференциальный усилитель 107 на выходе чувствительной схемы 103 для усиления выходного напряжения VDIFF, которое обычно составляет всего несколько милливольт. На Фиг.1 используется усилитель AD623, произведенный Analog Devices, Inc, Массачусетс, США. Такой усилитель использует менее 0.5 мА и имеет коэффициент усиления вплоть до 1000. Тем не менее, его мог бы заменить любой подходящий дифференциальный усилитель. Усилитель 107 соединен с напряжением VS питания, и коэффициент усиления усилителя устанавливается резистором RG в соответствии с:
 (3)
(3)
Таким образом, для коэффициента усиления ≈1000, RG установлено на 100 Ом.
Уравнение (3) применимо только для конкретного диапазона VDIFF. С любой стороны от данного диапазона усилитель будет насыщаться. В одном примере, если VDIFF = 0 В, VOUT = 1,5 В. Если VDIFF < -1,5 мВ, VOUT насыщается при 0 В. Если VDIFF > +1,5 мВ, VOUT насыщается при 3 В. В диапазоне -1,5 мВ < VDIFF < +1,5 мВ Уравнение (3) применимо, т.е. соотношение является линейным с градиентом, равным коэффициенту усиления, который равен приблизительно 1000, если RG установлено на 100 Ом.
Система 101 датчиков также включает микроконтроллер 109 и управляющий транзистор 111. В одном варианте воплощения микроконтроллер имеет вход GP0 и выходы GP2 и GP4. Чувствительная схема 103 и токовое зеркало 105 являются наибольшими потребителями энергии на Фиг.1. Для уменьшения энергопотребления чувствительная схема 103 и токовое зеркало 105 не получают электропитание непрерывно, а запускаются импульсным управляющим сигналом S1 от микроконтроллера 109. Импульсный ток IREF подается на токовое зеркало 105 и чувствительную схему 103 в соответствии с сигналом S1 на выходе GP2 микроконтроллера 109, посредством управляющего транзистора 111. Управляющий транзистор 111 ведет себя как переключатель, проводящий, когда сигнал на GP2 является высоким. Шириной и частотой импульса управляют посредством микроконтроллера 109. В данном варианте воплощения выход VOUT соединен с входом GP0 микроконтроллера для преобразования в цифровую форму выхода дифференциального усилителя. Выход GP0 отслеживают, и ширина и частота импульсного сигнала на GP2 может быть соответствующим образом отрегулирована. В варианте воплощения по Фиг.1 микроконтроллер 109 является КМОП 8-битным микроконтроллером с Flash памятью серии PIC12f675, произведенным Microchip Technology, Inc., Аризона, США. Микроконтроллер имеет питающий порт, порт заземления и шесть портов GP0-GP5 ввода/вывода (I/O), включая четыре порта для аналогово-цифрового преобразования. Он может функционировать при 3 В. Разумеется, может быть использован любой подходящий микроконтроллер.
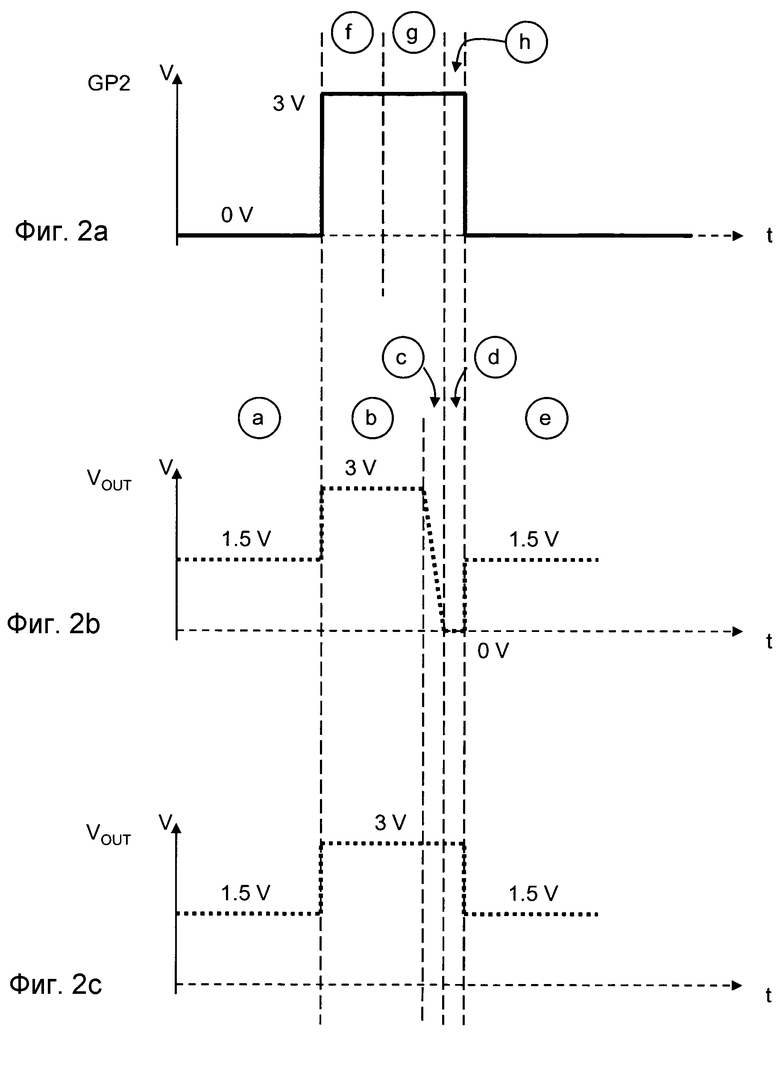
Фиг.2а показывает один импульс прямоугольного сигнала на выходе GP2 микроконтроллера (сигнал S1). Фиг.2b показывает, каким образом сигнал на GP2 влияет на сигнал на VOUT в отсутствие затяжки. Фиг.2а показывает зависимость напряжения от времени для GP2. Фиг.2b показывает зависимость напряжения от времени для VOUT. Графики на Фиг.2а и 2b приведены не в масштабе. Каждый импульс сигнала на GP2 на Фиг.2а поделен на три фазы, обозначенные f, g и h на Фиг.2а. Эти фазы будут обсуждаться ниже. Сигнал на VOUT на Фиг.2b поделен на пять фаз, обозначенных a, b, c, d и e на Фиг.2b.
В фазе a сигнал на GP2 равен 0 В. Это до импульса. Следовательно, на чувствительную схему 103 не подается ток. Через чувствительный резистор RS не течет ток, поэтому он имеет температуру окружающей среды. Выход (выходной сигнал) чувствительной схемы 103, VDIFF представляет собой 0 В, что дает выход VOUT в 1.5 В, как обсуждалось выше.
В фазе b сигнал на GP2 равен 3 В. Теперь на чувствительную схему 103 подается ток, что означает, что температура RS начинает повышаться. Выход VDIFF чувствительной схемы 103 увеличивается до более, чем 1,5 В, что означает, что выход VOUT усилителя насыщается при 3 В.
В фазе с температура RS продолжает расти, и это начинает уменьшать выход чувствительной схемы 103. VDIFF падает ниже уровня насыщения в 1,5 мВ, поэтому с выхода VOUT усилителя получают линейный отклик. Поэтому VOUT линейно падает вместе с VDIFF с ростом температуры RS.
В фазе d температура RS поднялась достаточно, так что VDIFF становится менее -1,5 мВ, и выход VOUT усилителя вновь насыщается, на этот раз при 0 В.
В фазе е импульс на GP2 заканчивается, поэтому напряжение GP2 вновь находится на 0 В. Ток более не подается на чувствительную схему 103, что означает, что выход VDIFF равен 0 В, что дает выход VOUT 1.5 В, так же как и в фазе а. Температура RS уменьшается перед следующим импульсом.
В данной системе затяжка может быть обнаружена во время фазы с для VOUT, т.е. в течение линейного отклика дифференциального усилителя. При традиционной схеме размещения чувствительную схему 103 устанавливают таким образом, что ее равновесие VDIFF=0 достигается, когда сопротивление нагревателя датчика достигло постоянной температуры при нулевом потоке. При постоянном токе это означает подачу тока на датчик в течение длительного времени, достаточного, чтобы сопротивление нагревателя датчика достигло равновесной температуры. Это означает высокое энергопотребление датчика. В данном варианте воплощения изобретения энергопотребление снижают такой регулировкой импульсов, что сопротивление нагревателя не может или с трудом может достигнуть своей равновесной температуры.
Фиг.2с показывает сигнал на VOUT при обнаружении затяжки. Фиг.2с показывает зависимость напряжения от времени для VOUT. Снова, график на Фиг.2с приведен не в масштабе. При затяжке результирующий поток текучей среды вызывает смещение наклона VOUT (фаза с) направо. Величина сдвига наклона пропорциональна скорости потока. При смещениях наклона вправо сигнал на VOUT в конечном счете принимает форму управляющего сигнала на GP2, показанного на Фиг.2а. Это показано на Фиг.2с. Сигнал на GP2 снижается до нуля до начала наклона в фазе с или одновременно с ним. Затяжку обнаруживают непосредственно перед концом импульса на GP2. Если сигнал на VOUT оцифрован (через GP0), если его значение выше порогового значения, затяжку полагают обнаруженной. Поэтому важно, чтобы VOUT был равен нулю в отсутствие какого-либо потока текучей среды и до измерения.
Фиг.3 показывает альтернативную схему размещения для чувствительной схемы 103 в виде конфигурации 303 моста Уитстона, включающего чувствительный резистор RS. Четыре стороны моста Уитстона включают в себя резисторы R1, RV (в левой ветви A'), R2 и (R3 + RS) (в правой ветви B') соответственно. Вновь, RV является регулируемым сопротивлением и используется для установления заданной точки моста Уитстона. Мостовая схема расположения является предпочтительной, поскольку она позволяет обнаружить малые изменения сопротивления датчика. Дополнительно, такая схема уменьшает изменения, вызванные изменением температуры окружающей среды.
Фиг.4 показывает, каким образом переменное сопротивление RV или саморегулирующаяся схема смещения могут быть использованы для установления заданной точки релаксации чувствительной схемы 103 или моста 303 для измерения сопротивления и регулировки чувствительности системы датчиков. Как описано со ссылкой на фазы b, с и d на Фиг.2b, сопротивление RS датчика увеличивается с включением электропитания до значения, определяемого шириной импульса сигнала на GP2, генерируемого микроконтроллером 109. RV или саморегулирующаяся схема смещения могут быть использованы для определения того, при каком уровне напряжения происходит это изменение RS, и это проиллюстрировано на Фиг.4.
Диапазон значений, которые может принимать RS с изменением температуры, показан на Фиг.4 в виде диапазона 401. Воздействие регулировкой RV или использованием саморегулирующейся схемы смещения предназначено для смещения диапазона 401 вдоль диагональной линии, что показано стрелкой 403. Заданная точка релаксации является точкой, в которую помещено изменение напряжения RS. Смещение диапазона 401 RS вдоль диагональной линии на Фиг.4 соответствует смещению наклона в фазе с для VOUT на Фиг.2b влево или вправо. Наилучшая чувствительность достигается, когда диапазон 401 начинается в нуле или чуть ниже нуля на Фиг.4, что соответствует расположению наклона в фазе с для VOUT в конце импульса GP2 на Фиг.2b или непосредственно перед ним.
Фиг.5 показывает один вариант воплощения способа работы схемы размещения по Фиг.1. Верхняя треть Фиг.5 показывает зависимость напряжения от времени для GP2 (сигнал S1). Центральная треть Фиг.5 показывает зависимость напряжения от времени для VOUT (соответствующего GP0). Нижняя треть Фиг.5 показывает зависимость напряжения от времени для выхода VCTRL микроконтроллера (соответствующего сигналу S2 на GP4). Графики на Фиг.5 приведены не в масштабе. Как уже обсуждалось, для минимизации энергопотребления чувствительная схема 103 или мост 303 Уитстона и токовое зеркало 105 питаются импульсным управляющим сигналом S1 на GP2. Один прямоугольный импульс GP2 показан на Фиг.2а. Левая сторона Фиг.5 показывает работу сигнала в первом режиме. Правая сторона Фиг.5 показывает работу сигнала во втором режиме.
Левая сторона Фиг.5 показывает способ работы, когда затяжка не обнаружена, и сигнал работает в первом режиме. Частота импульса при работе сигнала в первом режиме в данном варианте воплощения составляет 3 Гц, т.е. импульс есть приблизительно каждые 330 мс. Такая частота обеспечивает хороший компромисс между чувствительностью и энергопотреблением. Ширина импульса на GP2 в данном варианте воплощения равна 12,1 мс. Следовательно, напряжение VOUT имеет форму, показанную слева на Фиг.5. Заметим, что каждый импульс VOUT в нижней половине левой стороны Фиг.5 имеет форму, показанную на Фиг.2b, но форма импульса показана только схематически на Фиг.5. В левой стороне Фиг.5 затяжка не обнаружена, поэтому форма импульса аналогична форме, показанной на Фиг.2b, а не форме, показанной на Фиг.2с.
Правая сторона Фиг.5 показывает способ работы, когда затяжка обнаружена, и сигнал работает во втором режиме. Затяжка обнаружена в момент 501 времени. Как можно видеть на центральной трети правой стороны Фиг.5, затяжка обнаружена, поскольку нижний участок импульса VOUT (низ наклона в фазе с) имеет более высокое значение. Это соответствует смещению наклона в фазе с направо потоком текучей среды, так что наклон обрывается до достижения фазы d возвращением сигнала GP2 до 0 В. При обнаружении затяжки в момент 501 времени обнаружение на входе GP0 переключает сигнал S2 на выходе GP4 с 0 на 1, так что включается VCTRL, как показано на нижней трети на правой стороне Фиг.5. Обнаружение на входе GP0 также вызывает изменение частоты импульса на GP2, и система начинает работать во втором режиме. Разумеется, изменение сигнала на GP2 может быть также использовано для управления другими схемами, например, механизмом аэролизации, пульверизатором, нагревательным элементом и индикатором затяжки. Сейчас, в данном варианте воплощения, частота импульса GP2 во втором режиме равна 22 Гц, т.е. импульс появляется приблизительно каждые 45 мс, как показано в верхней трети правой стороны Фиг.5. Заметим, что ширина импульса остается такой же, как и в первом режиме, т.е. 12,1 мс в данном варианте воплощения. Заметим, что нижний участок сигнала VOUT соответствует пунктирной кривой, обозначенной 503. Эта кривая является профилем затяжки, так как степень наклона VOUT, сдвигающегося направо, пропорциональна скорости потока. Когда нижний участок сигнала на VOUT увеличивается, скорость потока увеличивается от нуля до своего максимального значения, а когда нижний участок сигнала на VOUT уменьшается от своего максимального значения до нуля, скорость потока уменьшается от максимального значения до нуля.
В данном варианте воплощения система правильно калибрована; это можно видеть из кривой 503, которая только достигает, но не превышает высокого значения VOUT. Это эквивалентно диапазону 401 RS на Фиг. 4, начинающемуся у нуля или чуть ниже нуля, и наклону фазы с для VOUT, расположенному на конце импульса GP2 или непосредственно перед ним. Эта калибровка может быть достигнута изменением RV или схемы смещения, что обсуждалось выше со ссылкой на Фиг.4, или альтернативным способом калибровки, который будет обсуждаться ниже.
В момент времени 505, когда никакие изменения не обнаружены вновь на VOUT, выход VCTRL возвращается к 0 В. Импульс GP2 остается на второй частоте, равной 22 Гц, в течение заданного периода времени после обнаружения затяжки в момент 501 времени до момента 507 времени, когда он возвращается к своей первой частоте 3 Гц. Это период 501-507 времени может быть или установлен заранее, или может быть основан на привычках пользователя. Например, период времени мог бы соответствовать среднему периоду времени между двумя затяжками.
Таким образом, в течение первого режима, когда частота импульса GP2 равна 3 Гц, в худшем случае время для первой затяжки составляет приблизительно 330 мс. Если затяжка сделана во время второго режима, когда частота импульса GP2 равна 22 Гц, максимальное время отклика намного быстрее, и в худшем случае время для затяжки составляет приблизительно 45 мс.
Сигнал VOUT, который представляет затяжку, может быть записан и может быть использован для извлечения различных данных. Например, из сигнала VOUT может быть записано среднее полное время для затяжки. Это соответствует периоду времени от 501 до 507 на Фиг.5. Также, наклон кривой 503 может быть использован для вычисления силы или интенсивности, с которой пользователь делает затяжку. Также, из профиля 503 затяжки по периоду времени от 501 до 505 может быть определен объем затяжки. Также, из сигнала VOUT может быть получен средний период времени между затяжками (хотя заметим, что для простоты на Фиг.5 показана только одна затяжка).
Эта информация может быть подана в микроконтроллер, и это допускает большую степень гибкости в работе. Например, из зарегистрированного времени между затяжками микроконтроллер может адаптировать период времени, в течение которого GP2 остается на высокой частоте (от 501 до 507) в соответствии с привычками пользователя. В качестве дополнительного примера, микроконтроллер мог бы переключаться автоматически из низкочастотного импульса GP2 в высокочастотный импульс GP2 в момент времени, когда ожидается следующая затяжка, основываясь на привычках пользователя. Это уменьшит время отклика, т.е. время для затяжки. В качестве дополнительного примера, сила с которой пользователь делает затяжку, может быть зарегистрирована и использована для управления доставкой аэрозоля, например, на привод, механизм аэролизации или нагревательный элемент, чтобы подходить пользователю.
Способ работы, показанный на Фиг.5, может быть реализован программным обеспечением микроконтроллера. Во-первых, программное обеспечение включает и инициирует микроконтроллер. Далее, программное обеспечение выполняет электронную стабилизацию. При завершении этих процессов микроконтроллер может быть использован для генерации импульсов на GP2 и считывания отклика на VOUT. Если VOUT не превышает 0,1 В, затяжка не была обнаружена, в случае чего устанавливают первую частоту импульса для сигнала S1 на GP2, в данном случае 3 Гц. Микроконтроллер продолжает генерировать импульсы с первой частотой импульса и считывать отклик на VOUT до обнаружения затяжки.
Если VOUT больше, чем 0,1 В, затяжка была обнаружена, в случае чего запускается таймер обратного отсчета. Это соответствует моменту 501 времени на Фиг.5. Выход VCTRL микроконтроллера на GP4 (S2) устанавливается на высокое значение, и устанавливают вторую частоту импульса для сигнала на GP2, в данном случае 22 Гц. Микроконтроллер генерирует импульсы на второй частоте на GP2 и считывает отклик на VOUT. Если VOUT больше, чем 0,1 В, затяжка все еще фиксируется, в случае чего импульс S1 на GP2 все еще подается на второй частоте, и выход VCTRL микроконтроллера для GP4 (S2) остается высоким.
Если VOUT не превышает 0,1 В, затяжка более не детектируется. Это соответствует моменту 505 времени на Фиг.5. В таком случае устанавливается низкое VCTRL. Затем, если таймер обратного отсчета имеет не ноль, период времени, в течение которого импульс GP2 должен оставаться на высокой частоте, еще не истек, т.е. момент 507 времени на Фиг.5 еще не достигнут. В таком случае импульсный сигнал S1 на GP2 остается на высокой частоте.
Если таймер обратного отсчета имеет не ноль, период времени, в течение которого импульс GP2 должен оставаться на высокой частоте, истек, т.е. момент 507 времени на Фиг.5 достигнут. В таком случае импульсный сигнал S1 на GP2 возвращается к первой низкой частоте.
Как обсуждалось выше, чувствительность системы может быть установлена регулировкой RV или подачей напряжения на неинвертирующий вход дифференциального усилителя до тех пор, пока выход усилителя VOUT не равен 0 В. Другим способом является использование калибровочного сигнала SC. Импульс калибровочного сигнала SC может генерироваться периодически, например, каждые x импульсов (например, 1000 импульсов) сигнала S1 на GP2, или каждый раз, когда сигнал на GP2 изменяется из второго режима (22 Гц) в первый режим (3 Гц). Вновь обращаясь к Фиг.2а, калибровочный импульс используется для поддержания постоянного периода времени для фазы d, т.е. когда VOUT равно ОВ. Если используется калибровочный импульс, ширина импульса на GP2 не является более фиксированной, но является переменной. Импульс на GP2 делится на три фазы, f, g и h, как показано на Фиг. 2а. Во время калибровки в фазе f, которая имеет постоянную длительность (в одном варианте воплощения 6 мс), сигнал на GP2 сохраняется высоким при 3 В, независимо от сигнала на VOUT. В фазе g наблюдают сигнал на VOUT, и, пока VOUT остается выше, чем 0 В (как в фазе b или с - см. Фиг.2b), сигнал на GP2 сохраняется высоким при 3 В. Как только сигнал на VOUT достигает 0 В (фаза d - см. Фиг.2b), регистрируется момент времени, и устанавливается постоянная длительность (в одном варианте воплощения 300 мкс) периода времени для фазы h для GP2, который соответствует фазе d для VOUT. Во время калибровки, в данном варианте воплощения, если VOUT не достигает 0 В после общей длительности импульса (f+g+h), 14 мкс, затяжку полагают обнаруженной.
В нормальном рабочем режиме, общая ширина импульса GP2 равна f+g+h. Время g, которое было зарегистрировано во время калибровки, теперь используется для вычисления общей продолжительности импульса. Этот способ калибровки системы для установки чувствительности очень выгоден по следующим причинам. Во-первых, настраиваемое сопротивление RV может быть заменено постоянным сопротивлением. Во-вторых, автоматическая калибровка происходит каждый раз, когда импульсный калибровочный сигнал SC имеет импульс. Это означает, что нет необходимости в ручной настройке любых компонент в системе, ни во время производства, ни во время технического обслуживания, так как система будет настраивать саму себя автоматически для лучшей чувствительности. Временное окно, выбранное в данном варианте воплощения, от 6 мс до 14 мс, достаточно велико, чтобы допускать любые изменения температуры окружающей среды и отклика различных электронных компонент, но могло бы быть выбрано любое подходящее временное окно.
Обеспечивается система датчиков расхода для восприятия потока текучей среды, указывающего затяжку в системе генерации аэрозолей. Система датчиков включает в себя чувствительную схему, содержащую чувствительный резистор и выход напряжения. Чувствительный резистор выполнен с возможностью обнаружения потока текучей среды на основе изменения сопротивления. Чувствительная схема выполнена таким образом, что изменение сопротивления чувствительного резистора вызывает изменение выходного напряжения. Система датчиков также включает в себя генератор сигналов, выполненный с возможностью подачи импульсного управляющего сигнала на чувствительную схему для питания чувствительной схемы. Чувствительная схема получает электропитание, когда импульсный управляющий сигнал является высоким, и не получает электропитание, когда импульсный управляющий сигнал является низким. Система датчиков выполнена с возможностью работы в первом режиме, в котором затяжка не ожидается или не обнаружена и в котором импульсный управляющий сигнал имеет первую частоту, и во втором режиме, в котором затяжка ожидается или обнаружена и в котором импульсный управляющий сигнал имеет вторую частоту выше, чем первая частота. Технический результат - обеспечение улучшенной системы датчиков расхода, подходящей для генерации аэрозолей. 3 н. и 11 з.п. ф-лы, 5 ил.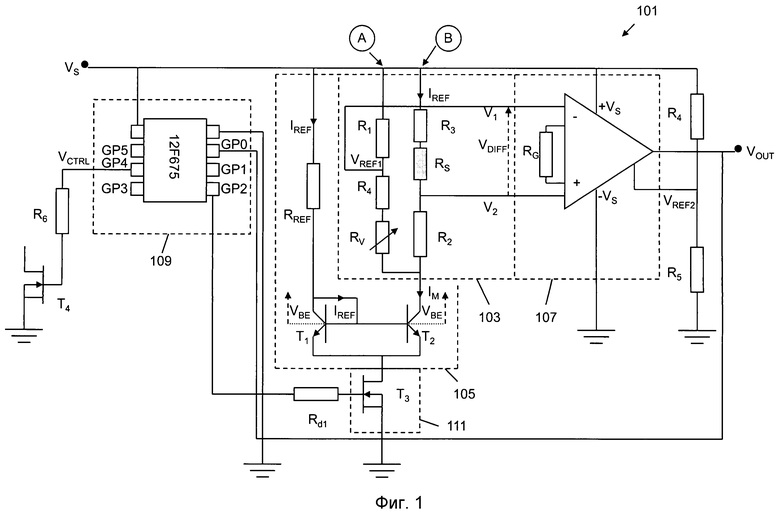
1. Система датчиков расхода для восприятия потока текучей среды, указывающего затяжку в системе генерации аэрозолей, причем система датчиков выполнена с возможностью работать в первом режиме, в котором затяжка не ожидается или не обнаружена, и во втором режиме, в котором затяжка ожидается или обнаружена, и содержащая:
чувствительную схему, содержащую чувствительный резистор и выход напряжения, причем чувствительный резистор выполнен с возможностью обнаруживать поток текучей среды, указывающий затяжку, на основе изменения сопротивления, причем чувствительная схема выполнена так, что изменение сопротивления чувствительного резистора вызывает изменение выхода напряжения; и
генератор сигналов, выполненный с возможностью подачи импульсного управляющего сигнала S1 на чувствительную схему для питания чувствительной схемы, так что чувствительная схема получает электропитание посредством сигнала S1, когда импульсный управляющий сигнал S1 является высоким, и не получает электропитание, когда импульсный управляющий сигнал S1 является низким, при этом импульсный управляющий сигнал S1 имеет первую частоту f1 в первом режиме и вторую частоту f2 выше, чем первая частота f1, во втором режиме, и при этом генератор сигналов выполнен с возможностью переключаться из первого режима во второй режим, когда затяжка ожидается или обнаружена чувствительной схемой.
2. Система датчиков расхода по п.1, дополнительно содержащая источник тока, выполненный с возможностью подачи тока заданной величины через чувствительную схему, в которой импульсный управляющий сигнал S1 подают на источник тока.
3. Система датчиков расхода по п.1 или 2, дополнительно содержащая дифференциальный усилитель, приспособленный усиливать выходное напряжение чувствительной схемы.
4. Система датчиков расхода по п.3, в которой выход дифференциального усилителя пропорционален выходному напряжению чувствительной схемы в диапазоне значений выходного напряжения чувствительной схемы и насыщается, когда выходное напряжение чувствительной схемы ниже чем или выше чем диапазон.
5. Система датчиков расхода по п.1, дополнительно содержащая средство для регулировки чувствительности системы датчиков, причем средство для регулировки чувствительности содержит одно или более из:
переменного резистора в чувствительной схеме;
саморегулирующейся схемы смещения; и
генератора сигналов для подачи импульсного калибровочного сигнала SC на чувствительную схему.
6. Система датчиков расхода по п.1, в которой чувствительная схема содержит мост Уитстона, имеющий первую ветвь и вторую ветвь, и в которой выходное напряжение является разницей между напряжением в первой ветви и напряжением во второй ветви.
7. Система генерации аэрозолей для приема формирующего аэрозоль субстрата, причем система включает в себя систему датчиков расхода для восприятия потока текучей среды в системе генерации аэрозолей, указывающего затяжку, причем систему датчиков расхода по любому из предшествующих пунктов.
8. Система генерации аэрозолей по п.7, дополнительно содержащая:
по меньшей мере, один нагревательный элемент для нагрева субстрата, чтобы формировать аэрозоль;
в которой система датчиков расхода выполнена с возможностью активации нагревательного элемента, когда система датчиков расхода воспринимает поток текучей среды, указывающий на затяжку.
9. Способ для управления системой датчиков расхода для восприятия потока текучей среды, указывающего затяжку в системе генерации аэрозоля, причем система датчиков выполнена с возможностью работать в первом режиме, в котором затяжка не ожидается или не обнаружена, и во втором режиме, в котором затяжка ожидается или обнаружена, причем способ содержит этапы:
подают импульсный управляющий сигнал S1 на чувствительную схему для подачи электропитания на чувствительную схему, так что чувствительная схема получает электропитание посредством сигнала S1, когда импульсный управляющий сигнал S1 является высоким, и не получает электропитание, когда импульсный управляющий сигнал S1 является низким, причем чувствительная схема включает в себя чувствительный резистор и выход напряжения, причем чувствительный резистор выполнен с возможностью обнаружения потока текучей среды, указывающего затяжку, на основе изменения сопротивления чувствительного резистора, причем чувствительная схема выполнена так, что изменение сопротивления чувствительного резистора вызывает изменение выходного напряжения; и переключают систему датчиков между первым и вторым режимами работы, при этом импульсный управляющий сигнал S1 имеет первую частоту f1 в первом режиме, и имеет вторую частоту f2, которая выше, чем первая частота f1, во втором режиме, когда затяжка ожидается или обнаружена чувствительной схемой.
10. Способ по п.9, в котором этап переключения системы датчиков между первым и вторым режимами работы содержит переключение системы датчиков из первого режима, в котором импульсный управляющий сигнал S1 имеет первую частоту f1, во второй режим, в котором импульсный управляющий сигнал S1 имеет вторую частоту f2, если обнаружена затяжка.
11. Способ по п.9 или 10, в котором этап переключения системы датчиков между первым и вторым режимами работы содержит переключение системы датчиков из первого режима, в котором импульсный управляющий сигнал S1 имеет первую частоту f1, во второй режим, в котором импульсный управляющий сигнал S1 имеет вторую частоту f2, когда ожидается затяжка, на основе привычек пользователя.
12. Способ по п.9, дополнительно содержащий этап подачи сигнала S2 на другие компоненты в системе генерации аэрозолей, причем сигнал S2 является высоким, когда выходное напряжение чувствительной схемы указывает, что обнаружена затяжка, и сигнал S2 является низким, когда выходное напряжение чувствительной схемы указывает на то, что затяжка не обнаружена.
13. Способ по п.9, дополнительно содержащий этап регулировки чувствительности системы датчиков, содержащий одно или более из:
периодической регулировки сопротивления переменного резистора в чувствительной схеме;
обеспечение саморегулирующейся схемы смещения; и
подачу импульсного управляющего сигнала SC на чувствительную схему.
14. Способ по п.9, дополнительно содержащий этап доставки аэрозоля пользователю в зависимости от характеристик затяжки, обнаруженной чувствительной схемой.
| US 5388594 A, 14.02.1995 | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| RU 2005115958 A, 10.11.2005. | |||

