ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Изобретение касается системы и способа для удаления волос. Система, например, способна сбривать, подрезать или перманентно удалять волосы человека или животного. Система для удаления волос может содержать, например, сборочный узел системы обнаружения волос и бреющего устройства на основе лазера.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В известной системе для удаления волос волосы детектируются, например, оптической системой обнаружения. Как только один волос обнаружен, на волосе фокусируется световой луч, так чтобы его срезать или удалить путем разрушения корня волоса. Пример способа срезания волос с использованием источника лазерного излучения известен как оптическое разрушение под воздействием лазера (Laser Induced Optical Breakdown, LIOB).
В публикации WO-00/62700 представлена система, содержащая устройство обнаружения волос и устройство для удаления волос, которое функционально связано с устройством обнаружения волос. Устройство обнаружения волос содержит устройство отображения, имеющее первый датчик изображения. Устройство отображения выполнено с возможностью получения изображения участка кожи, который следует обработать. Блок управления выполнен с возможностью распознавания на этом изображении волоса на участке кожи. Блок управления функционально связан с устройством для удаления волос, так чтобы контролировать его работу. Система включает в себя лазерный источник, а также регулируемое устройство для управления лучом. Датчик изображения содержит датчик на основе прибора с зарядовой связью (CCD) или датчик на основе комплементарной структуры «металл-оксид-полупроводник» (CMOS).
В публикации WO-2007/013008-A1 того же заявителя представлены усовершенствованное определение положения и ориентации волоса, а также скорость выполнения этого. Система способна определить положение волоса на коже в трех измерениях. Первый датчик изображения используется для примерного определения положения и/или ориентации волоса. Второй датчик изображения используется для более точного определения положения и/или ориентации этого волоса в трех измерениях. Используя данные от первого датчика, можно ограничить время, необходимое для более тщательного, но медленного сканирования, выполняемого вторым датчиком изображения, при условии, что последнему лишь требуется сформировать изображение выбранной части участка кожи, изображение которого сформировано первым датчиком. Выбор может выполняться блоком управления, который может располагать программным обеспечением и/или аппаратным обеспечением для обработки изображения.
Первый датчик изображения выполнен с возможностью создания по существу двумерного изображения. Датчики изображения, способные обеспечить такую информацию, сравнительно просты и обладают высоким быстродействием. В частности, первый датчик изображения содержит 2D-оптический датчик изображения, предпочтительно устройство с зарядовой связью, CMOS-устройство или матрицу в фокальной плоскости, составленную из фотодетекторов.
Световой источник может содержать, например, светоизлучающие диоды (LED) или источник лазерного излучения. Светоизлучающий диод весьма компактен и обладает низким энергопотреблением, и осуществляет излучение в сравнительно узком диапазоне длин волн. Это позволяет легко выполнять фильтрацию, или управлять излучением в иных аспектах, там, где это требуется. Кроме того, светоизлучающие диоды легко поддаются управлению и имеют относительно долгий срок службы. Источник лазерного излучения может иметь высокую плотность энерговыделения и осуществлять по существу монохроматическое излучение, которое очень хорошо поддается управлению с помощью специальных зеркал, фильтров и т.д. Таким образом, лазеры также пригодны для целей сканирования и визуализации. Получаемая плотность энерговыделения достаточно высока для срезания или удаления волос человека или животного.
Системы, описанные выше, способны формировать световой луч для удаления волос. В одном варианте осуществления световой луч может быть направлен на корень волоса с целью разрушения корня. После этого волос выпадет из кожи. В этом варианте осуществления система включает в себя устройство для эпиляции. В другом варианте осуществления световой луч направляется в местонахождение цели на видимой части волоса, т.е. на части волоса, которая выступает из кожи. Световой луч прожжет насквозь волос в местонахождении цели. В последнем варианте осуществления система включает в себя устройство для бритья и стрижки.
Хотя устройства для удаления волос, описанные выше, дают ряд преимуществ по сравнению с предшествующим уровнем техники, световой луч может быть нацелен на один и тот же волос более одного раза. Наведение светового луча на тот же самый волос возможно, т.к. волос остается в коже или на коже после того, как световой луч был направлен на волос или на корень волоса. Детектирование волоса может при этом осуществляться дважды или большее число раз. Наведение светового луча на один и тот же волос более одного раза является недостатком с точки зрения увеличения потребления мощности и возможного повреждения кожи или даже причинения травмы.
Единственный волос может обнаруживаться, например, дважды или большее число раз в силу соотношения между диаметром волоса и разрешающей способностью системы. Волос, имеющий диаметр, например, 100 мкм, может детектироваться, по меньшей мере, четыре раза, если система имеет разрешение 20 мкм. Если процесс срезания индуцируется в центре волоса, тот же самый волос может быть снова обнаружен впоследствии. Например, после срезания волоса существует вероятность, что волос сразу же не выпадет с кожи или из кожи. Позднее этот волос может быть обнаружен и на него снова может быть выполнено наведение.
ЗАДАЧА И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в предотвращении наведения режущего светового луча на один и тот же волос более одного раза.
Для этого настоящее изобретение обеспечивает систему для удаления волос, содержащую:
- устройство обнаружения волос для обнаружения волоса на участке кожи, который следует обработать;
- устройство для удаления волос, функционально связанное с устройством обнаружения волос и включающее в себя световой источник для формирования светового импульса, а также световодное средство для направления светового импульса от светового источника в местонахождение цели на волосе; а также
- блок управления, связанный с устройством обнаружения волос и устройством для удаления волос, так чтобы управлять их работой, при этом блок управления определяет местонахождение цели и активирует световой источник для формирования светового импульса в течение периода, на котором устройство обнаружения волос способно обнаружить волос,
отличающаяся
- предохранительными средствами, связанными с блоком управления и выполненными с возможностью недопущения в течение периода принятия предохранительных мер, на протяжении которого устройство обнаружения волос способно обнаружить волос и начинающегося после того, как световой импульс направлен в местонахождение цели, того, чтобы, по меньшей мере, часть устройства обнаружения волос или устройства для удаления волос повторно направляли следующий световой импульс на волос.
Предохранительные средства не допускают подачи световых импульсов на один и тот же волос более чем заданное число раз. В зависимости от типа целевого волоса, заданное число раз, которое необходимо для удаления целевого волоса, может составлять один, два или большее число раз. Поскольку изобретение не допускает подачи световых импульсов более чем заданное число раз, не допускается повреждение кожи или нанесение травм, а также снижается потребление энергии. Система по изобретению более удобна для пользователя и, например, может быть использована неопытными или непрофессиональными пользователями. В период принятия предохранительных мер, предохранительные средства, например, блокируют подачу светового импульса или блокируют обнаружение волос. Кроме того, предохранительные средства могут распознать многократное обнаружение одного и того же волоса и вслед за этим дать начало периоду принятия предохранительных мер.
В одном варианте осуществления предохранительные средства содержат средства электронной задержки для реализации упомянутого периода принятия предохранительных мер. Средства задержки реализуют период принятия предохранительных мер. Средства задержки могут входить в состав одной или нескольких частей системы, при этом задержка сигнала не допускает подачи светового импульса на один и тот же волос более одного раза.
В дополнительном варианте осуществления средства электронной задержки содержат сдвиговый регистр. Сдвиговый регистр обеспечивает сравнительно простую, легкодоступную и малозатратную реализацию средств задержки.
В другом варианте осуществления средства электронной задержки включают в себя фильтр, содержащий, по меньшей мере, одну емкость, при этом блок управления выполнен с возможностью зарядки емкости до пикового уровня, который выше порогового уровня, после того как блок управления распознал соответствующий волос в первый раз. Фильтр обеспечивает простую, надежную и малозатратную реализацию средств задержки.
В дополнительном варианте осуществления время, в течение которого емкость заряжается до уровня выше порогового, определяет период принятия предохранительных мер. Период разрядки содержит период зарядки и период разрядки. Период зарядки может быть продолжительнее или короче периода разрядки.
В другом варианте осуществления блок управления выполнен с возможностью зарядки емкости всякий раз, когда обнаруживается один и тот же волос.
В еще одном варианте осуществления предохранительные средства содержат запоминающее средство, связанное с блоком управления. Объем памяти и скорость обновления данных, содержащихся в запоминающем устройстве, могут определять период принятия предохранительных мер. Могут быть предусмотрены различные установочные параметры. Запоминающее устройство может содержать, например, сравнительно простой сдвиговый регистр. Обнаружение определенного волоса сохраняется в запоминающем устройстве, что зависит от числа позиций в регистре и скорости обновления. Число позиций и скорость обновления могут быть подобраны в зависимости от области применения, скорости срезания и т.д.
В дополнительном варианте осуществления предохранительные средства содержат средства отклонения, связанные с блоком управления при эксплуатации системы для удаления волос, при этом средства отклонения расположены между кожей и устройством обнаружения волос и/или между кожей и устройством для удаления волос и имеют первое состояние, при котором свет может проходить в заданном направлении, а также второе состояние, при котором свет отклоняется от заданного направления. В течение периода принятия предохранительных мер, средства отклонения отклоняют луч от траектории, ведущей от устройства обнаружения волос к коже и/или от устройства для удаления волос к коже, или наоборот.
Средства отклонения могут содержать жидкокристаллическое устройство. Жидкокристаллическое устройство содержит жидкие кристаллы, такие как в жидкокристаллическом дисплее. Сравнительно малое количество электрической энергии будет достаточным для отклонения света от заданной световой траектории, как описано выше. Кроме того, жидкокристаллическое устройство сравнительно невелико и является плоским и, таким образом, может быть легко встроено в существующие системы для удаления волос.
В другом варианте осуществления отклоняющие средства содержат термически обратимый светорассеивающий материал (Thermally Reversible Light Scattering, TRLS). Такие материалы способны обратимо переходить из прозрачного состояния в непрозрачное состояние с использованием изменения температуры.
В одном варианте осуществления средства отклонения содержат золь-гель. Золь-гель может обратимо переходить от водного раствора полимеров к гелю путем изменения условий окружающей среды. Водный раствор по существу проницаем, в то время как гель отклоняет свет. Изменения условий окружающей среды могут включать в себя изменения температуры и изменения кислотности (pH). Гель сохраняет целостную структуру в течение заданного периода времени, который может быть подобран для реализации периода принятия предохранительных мер.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеупомянутые признаки изобретения будут освещены со ссылкой на прилагаемые чертежи, где:
на фиг.1 схематично показан пример системы для удаления волос;
на фиг.2 схематично показан первый датчик изображения, используемый в системе, показанной на фиг.1;
на фиг.3 схематично показан второй датчик изображения, используемый в системе, показанной на фиг.1;
на фиг.4 схематично представлены первое и второе поля обзора, включающие в себя один волос на коже;
на фиг.5 схематично показан пример фрагмента системы для удаления волос;
на фиг.6а и 6b показаны два этапа способа определения положения волоса и срезания волоса;
на фиг.7 схематично показан пример датчика изображения, предназначенного для системы для удаления волос;
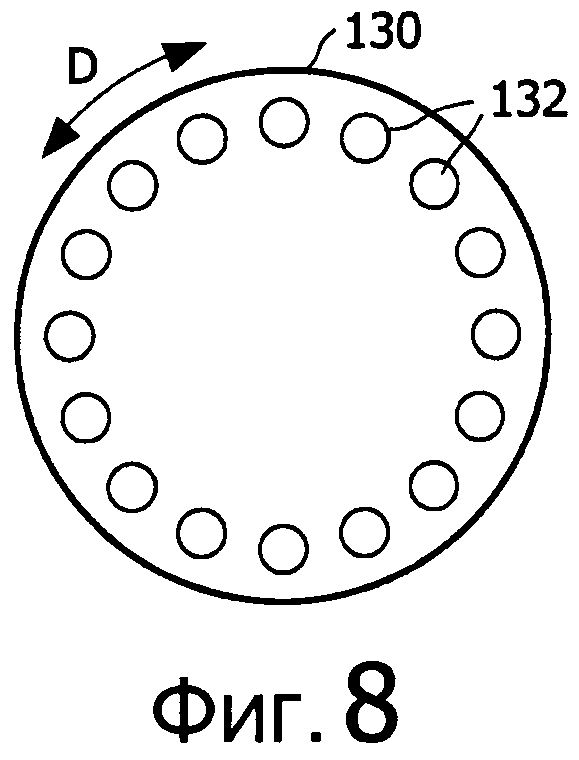
на фиг.8 показана поворачиваемая матрица линз для датчика изображения или источника света системы для удаления волос;
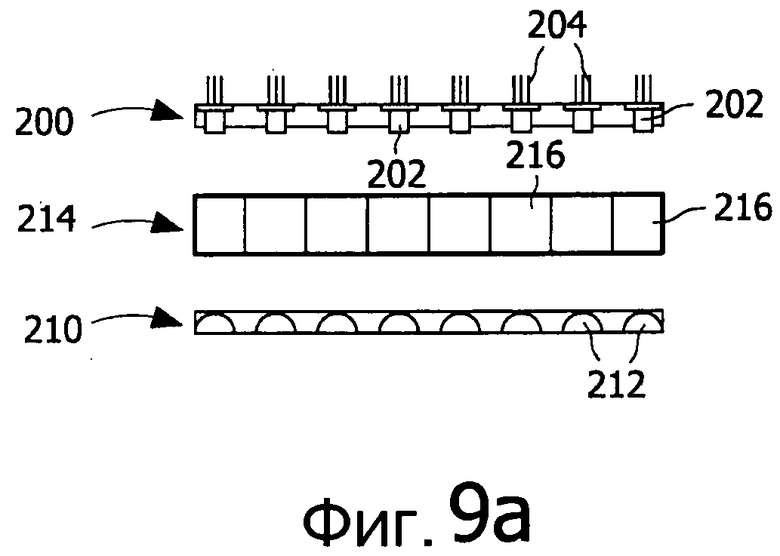
на фиг.9а показан вид спереди сборочного узла, включающего в себя матрицу датчиков, матрицу линз и средство для прерывания светового луча по настоящему изобретению;
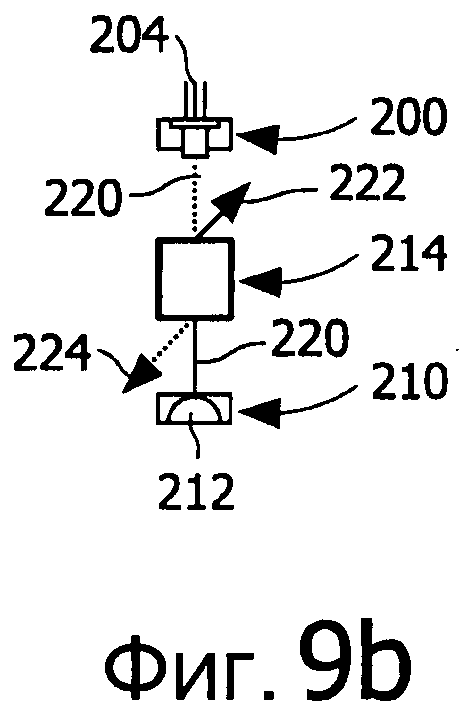
на фиг.9b показан вид сбоку сборочного узла, показанного на фиг.9а;
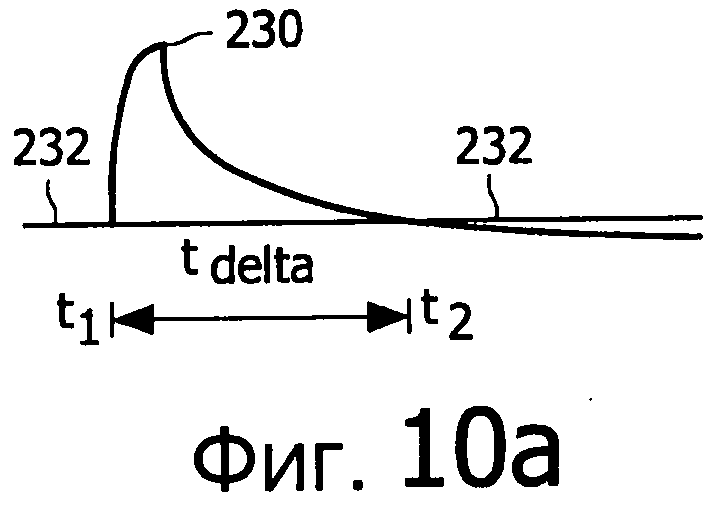
на фиг.10а схематично показан сигнал обнаружения волоса по настоящему изобретению, при этом по оси x отложено время t;
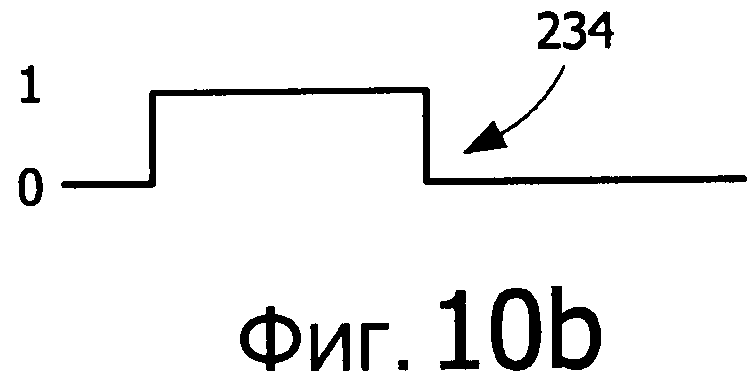
на фиг.10b схематично показан сигнал блокирования обнаружения, соответствующий сигналу обнаружения на фиг.10а;
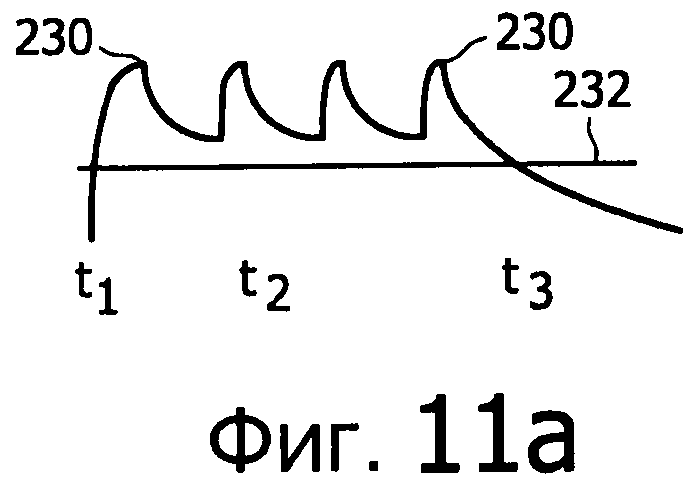
на фиг.11а схематично показан сигнал обнаружения волоса по настоящему изобретению, при этом по оси x отложено время t;
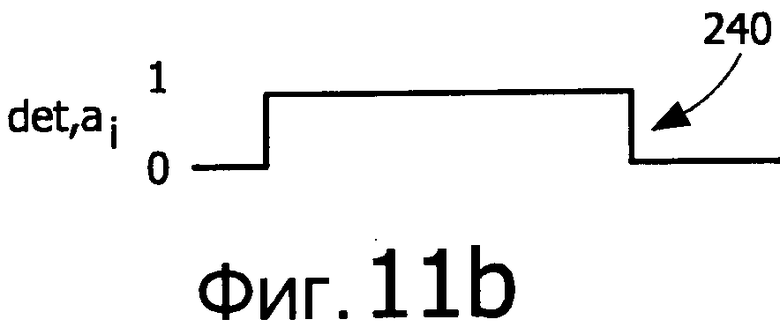
на фиг.11b схематично показан оцифрованный сигнал обнаружения волоса, соответствующий сигналу обнаружения волоса на фиг.11а; а также
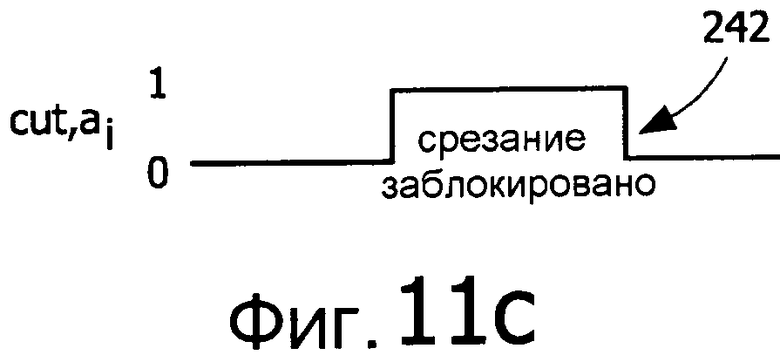
на фиг.11с схематично показан сигнал блокирования обнаружения, соответствующий сигналам на фиг.11а и фиг.11b.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
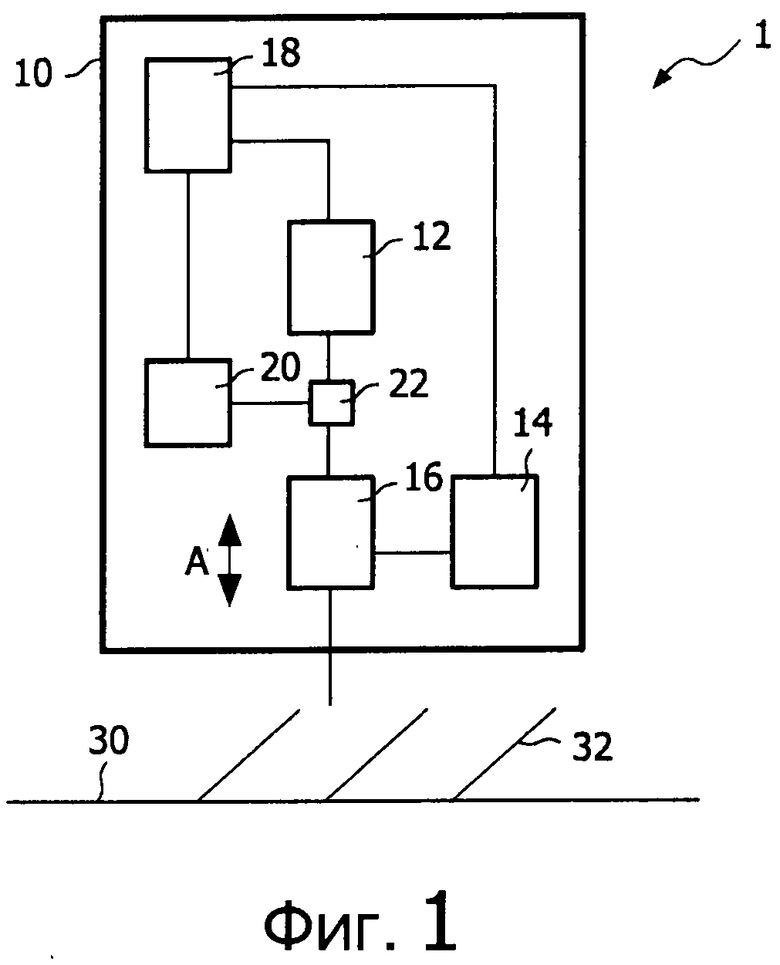
На фиг.1 схематично показан пример системы 1 для удаления волос, в которой используется источник света для временного или перманентного удаления волос.
Система 1 содержит корпус 10 с первым датчиком 12 изображения и вторым датчиком 14 изображения, регулируемой линзой 16, блоком 18 управления, устройством 20 для удаления волос, а также оптическим соединением 22. Отдельная подвижная линза 16, также как и оптическое соединение 22 могут использоваться по выбору, как будет показано далее.
На этой фигуре также показана кожа 30 с волосами 32, которые следует удалить.
Корпус 10 системы 1 содержит лишь части, которые имеют отношение в качестве примеров к функционированию системы для удаления волос. Очевидно, что дополнительные части, такие как блок питания, оптическое окно и т.д., также могут присутствовать, но не показаны.
Первый датчик 12 изображения может содержать, например, CCD-камеру, CMOS-устройство и т.д. Второй датчик 14 изображения соединен с регулируемой линзой 16 и может содержать сканирующий блок.
Оба датчика 12 и 14 изображения соединены с блоком 18 управления, который выполнен с возможностью распознавания волос из изображений, полученных датчиками 12 и 14.
С блоком 18 управления также соединено устройство для удаления волос, такое как лазерная система, система электрической эпиляции и т.д. Линза 16 может перемещаться по направлению стрелки A, чтобы производить фокусировку при различных значениях z, с целью сканирования и получения изображения в z-направлении. При необходимости регулируемая линза 16 может перемещаться вбок, например, в направлении, перпендикулярном стрелке A, чтобы освободить поле обзора первого датчика 12 изображения.
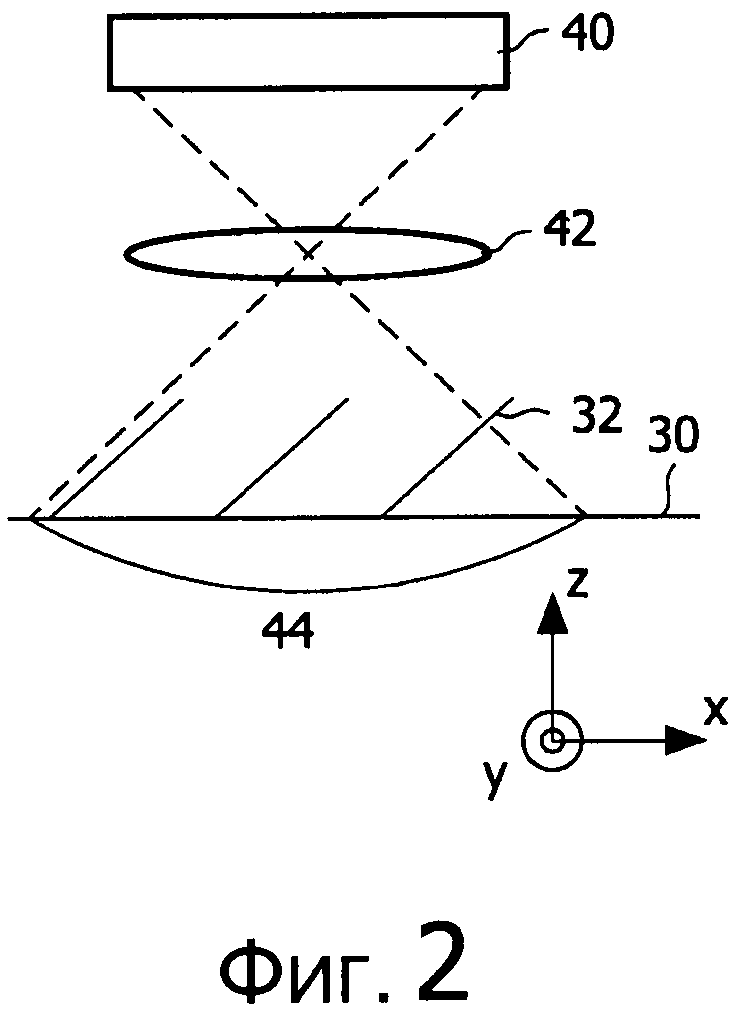
На фиг.2 схематично показан первый датчик изображения, используемый в системе. Здесь, как и на всех фигурах, схожие части имеют одинаковые ссылочные позиции. На этой фигуре ссылочная позиция 40 относится к CCD, 42 относится к оптической системе, а 44 относится к полю обзора CCD.
На фиг.2 в поле обзора CCD находятся несколько волос 32, а именно три, поскольку большинство CCD-камер имеют поля обзора, например, равные одному или более см2. На такой площади, например, бороды человека содержится несколько десятков волос. Однако разрешение и диапазон в перпендикулярном направлении, например, в z-направлении, как показано на фиг.2, ограничены и определяются характеристиками оптической системы 42. Следует отметить, что CCD может определить изображение за один этап, когда все пиксели «заполняются» одновременно.
Поскольку CCD-датчик изображения сам по себе известен специалистам, его детали здесь не описываются.
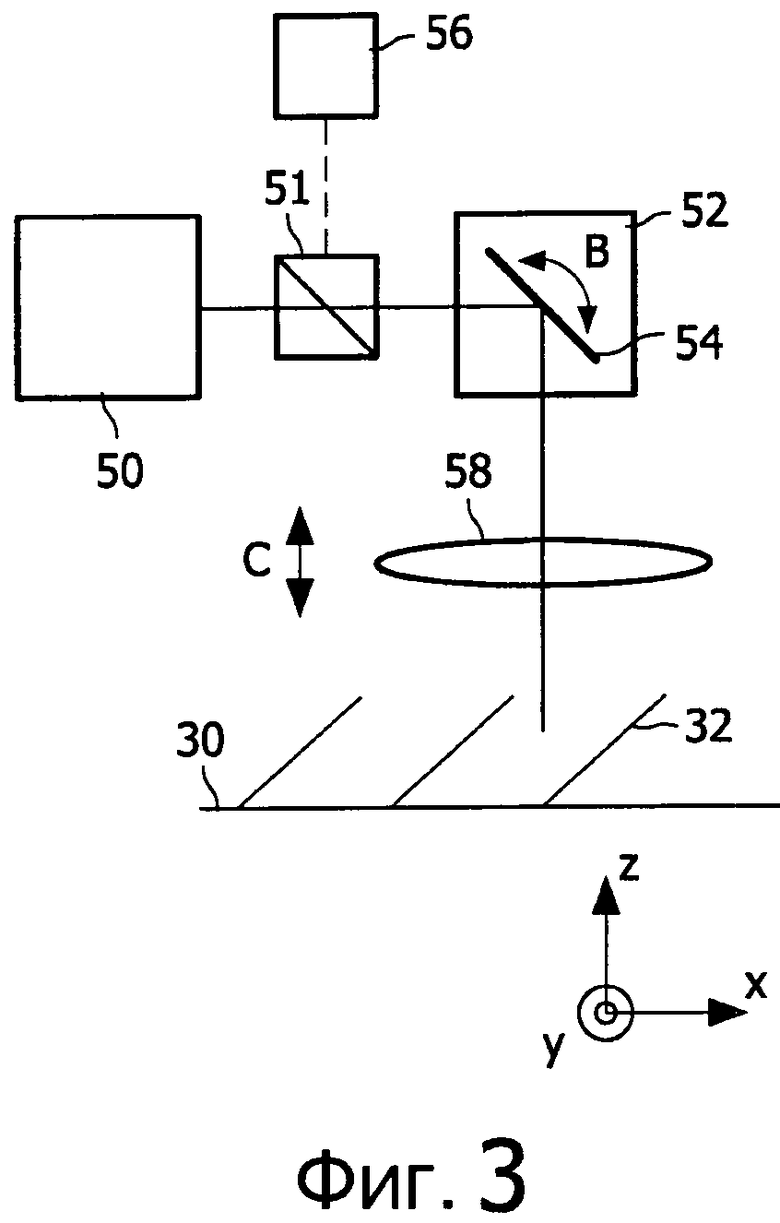
На фиг.3 схематично показан второй датчик изображения, который может использоваться в системе для удаления волос. На этой фигуре ссылочная позиция 50 относится к лазерному источнику, 51 - к расщепителю луча, 52 - к устройству для управления лучом с подвижным зеркалом 54, способным перемещаться, например, по направлению стрелки B. Детектор обозначен ссылочной позицией 56, а линза 58 способна перемещаться по направлению стрелки C.
В качестве альтернативы лазерному источнику 50 может быть выбран любой другой подходящий источник излучения, такой как LED с линзой. Испускаемый луч частично пропускается расщепителем 51 луча (который может быть или не быть поляризующим), а частично отражается вниз, например, в ловушку пучка (не показана).
Устройство 52 для управления лучом может управляться, например, блоком управления (не показан) и содержит подвижное зеркало 54, такое как многоугольное зеркало, или любой другой пригодный тип зеркала, используемого для развертки изображения. Как показано, зеркало 54 может перемещаться, например, поворачиваться по направлению стрелки B, чтобы осуществить сканирование излучаемым лучом требуемой области, в данном случае второго поля обзора. На практике поле обзора второго датчика изображения будет иметь размеры примерно 0,5 мм × 0,5 мм в направлениях x, y и такой же размер в z-направлении. Чтобы получить последний диапазон, оптическая система или линза 58 способна перемещаться в направлении C. По альтернативному варианту может регулироваться оптическая сила оптической системы или линзы 58, т.е. ее фокусное расстояние.
Детектор 56 оптически связан с устройством 52 для управления лучом через расщепитель 51 луча. Излучение, отраженное, претерпевшее рамановское рассеяние и т.п. на коже 30 или волосах 32, отражается зеркалом 54 в направлении расщепителя 51 луча и будет частично отражено в направлении детектора 56.
Детектор 56 может содержать CCD или CMOS, или любой другой вид фотодетектора, или матрицу таковых. Детектор 56 также должен быть связан с блоком управления (не показан), чтобы блок управления мог определить местоположение и/или ориентацию волоса 32 на коже 30. Для этого второго датчика изображения будет получено трехмерное изображение. Такой тип датчика изображения можно также назвать 3D сканирующим датчиком. Дополнительные подробности, по существу известные на существующем уровне техники и очевидные для специалиста, обсуждаться не будут.
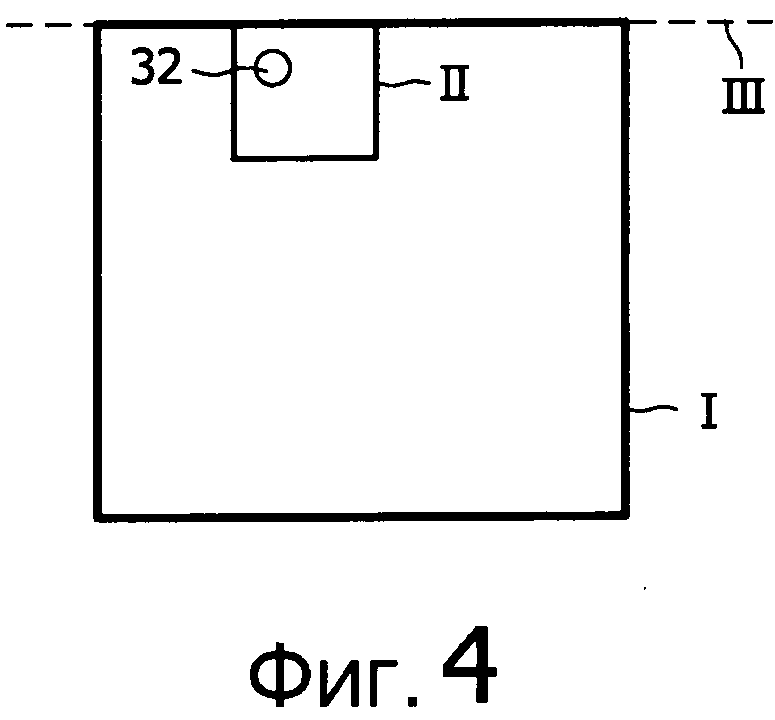
На фиг.4 схематично представлены поля обзора первого и второго датчиков изображения, включая один волос на коже.
Область, обозначенная как I, представляет собой квадрат размером около 2×2 мм. Она составляет 1/100th поверхностной площади среднего поля обзора CCD-датчика, согласно пунктирной линии III. Область I размером 2×2 мм представляет среднюю поверхностную площадь, приходящуюся на волос 32 бороды человека. Волос 32 вычерчен в масштабе, хотя и схематично, при его диаметре около 120 микрон. Показана также поверхность, обозначенная как II. Она представляет среднюю поверхностную площадь, которая может быть отсканирована современным 3D-сканирующим датчиком. Ее размеры составляют около 0,5×0,5(×0,5) мм. Из этой фигуры ясно, что сравнительно малая часть общего поля обзора первого (CCD) датчика должна быть отсканирована вторым датчиком изображения (поверхностная площадь II). Поскольку 3D-сканирование последним датчиком изображения занимает, в общем и целом, больше времени, второй датчик изображения может использоваться более эффективно.
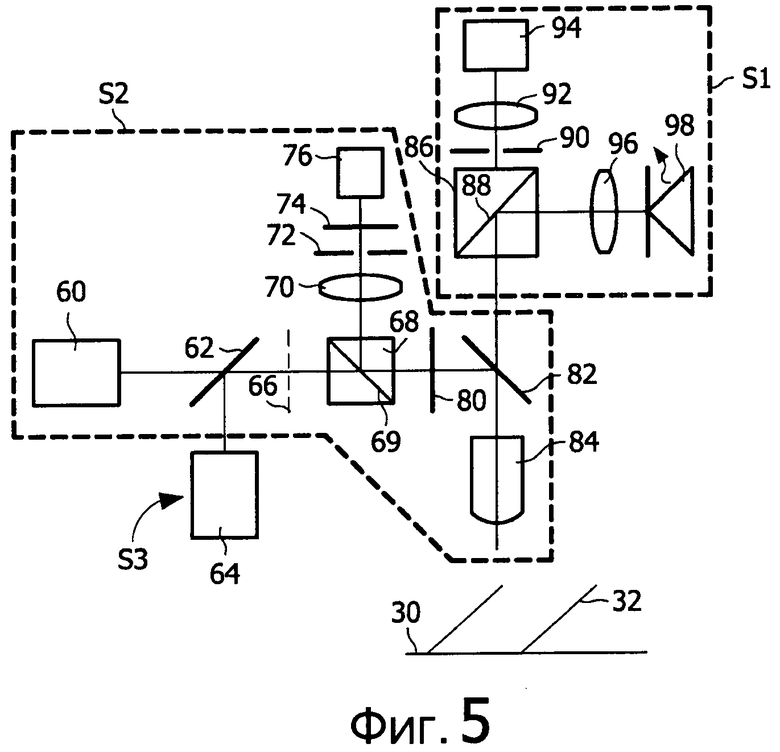
На фиг.5 схематично показан пример системы для удаления волос более подробно. На этой фигуре S1 в целом обозначает первый датчик изображения, S2 обозначает второй датчик изображения, а S3 обозначает систему для удаления волос.
Второй датчик S2 изображения содержит детектирующий лазер 60, расщепитель 62 луча, прерыватель 66, первый поляризующий расщепитель 68 луча с первой лучерасщепляющей поверхностью 69, первую линзу 70, первое точечное отверстие 72, полосовой фильтр 74 и детектор 76. Кроме того, он содержит λ/4-пластинку 80, зеркало 82 и линзу 84 объектива.
Первый датчик S1 изображения, в общем, содержит второй поляризующий расщепитель 86 луча со второй лучерасщепляющей поверхностью 88, диафрагму 90, трубчатую линзу 92 и CCD 94, а также линзу 96 LED и LED 98.
Устройство для удаления волос содержит режущий лазер 64. Режущий лазер 64, детектирующий лазер 60, детектор 76, а также CCD 94 и линза 84 объектива могут быть все связаны с блоком управления (не показан). Кроме того, детектирующий лазер 60 и режущий лазер 64 также могут быть одним и тем же лазером, в особенности, если это настраиваемый лазер. Более того, различные части не являются обязательными, например, в последнем случае, расщепитель 62 луча, прерыватель 66, поляризующие расщепители 68 и 86 лучей, точечные отверстия 72 и 90, λ/4-пластинка 80 и зеркало 82.
Свет для осуществления способа CCD-детектирования в первом датчике S1 изображения излучается посредством LED 98 с дополнительной линзой 96 LED. Часть излучения отражается поверхностью 88, проходит через зеркало 82, которое является проницаемым для LED-излучения, но обладает высокой отражающей способностью, например, для 1064 нм излучения в данном случае, и попадает на кожу 30 с волосом 32. Их изображение отражается и снова проходит через второй поляризующий расщепитель 86 луча, точечное отверстие 90, трубчатую линзу 92 и детектируется с помощью CCD 94. Следует отметить, что линза 84 объектива подвижна и может перемещаться в сторону. Следует также отметить, что свет или иное излучение, такое как инфракрасное излучение, может также подаваться непосредственно, т.е. не конфокально. Например, LED может излучать непосредственно на кожу. В этих случаях поляризующий расщепитель 86 луча не требуется.
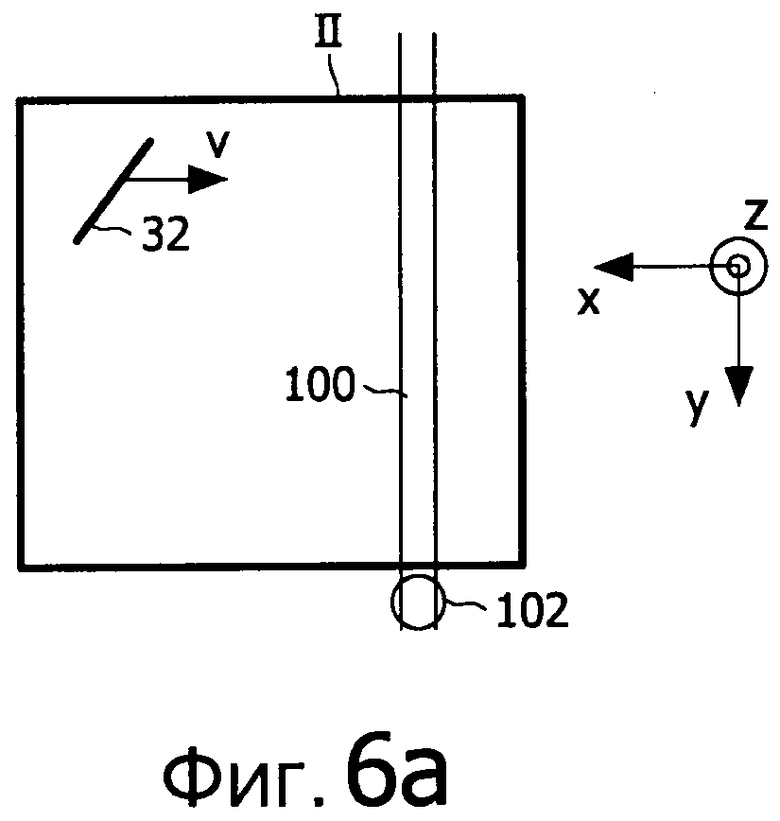
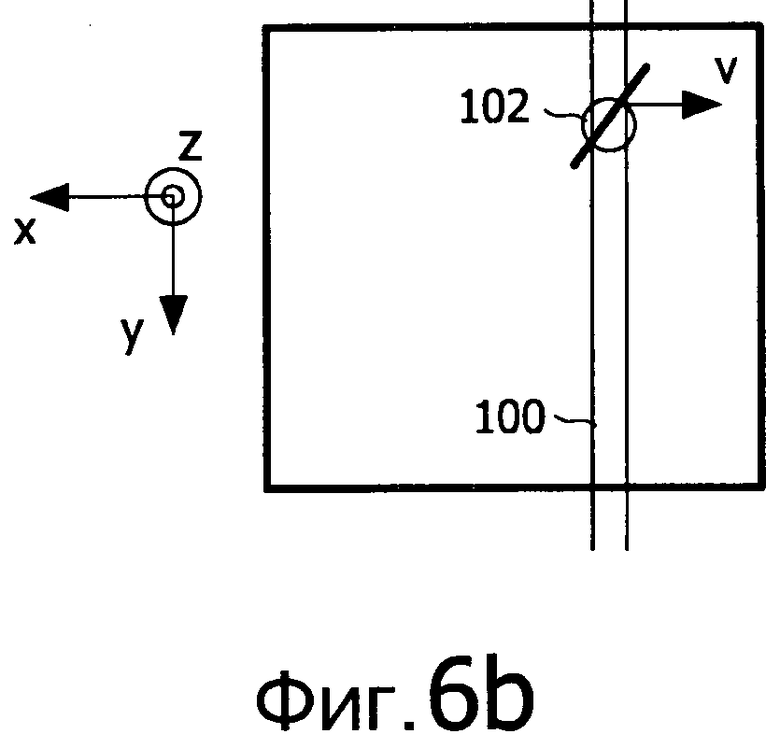
На фиг.6а и 6b показаны два этапа способа определения положения волоса и срезания волоса. На этих фигурах позицией II показано изображение участка кожи, на котором присутствует один волос 32. Ссылочная позиция 100 относится к направляющей, а 102 - к подвижной линзе.
На практике система в полном составе перемещается по коже. Поскольку перемещение является относительным, на фигуре 6a это представлено перемещением волоса 32 со скоростью v в направлении показанной стрелки. Используя первый и второй датчики изображения, определяют примерное положение волоса 32 в координатах x,y. Затем подвижная линза 102 перемещается вдоль направляющей 100 в это местоположение x,y, см. фиг.6b, где сканированием определяют положение по оси z. Когда местоположение в трех измерениях определено достаточно точно, волос может быть удален лазерным лучом, электрической эпиляцией посредством соответствующего позиционирования электрических игл и т.д.
Со ссылкой на предшествующее описание, можно дать следующий численный пример. Средняя скорость v при сбривании составляет около 5 см/с. Полезное разрешение в плоскости x,y составляет около 20 мкм. При обычной камере 1000×1000 пикселей это составит общее поле 2 см × 2см. Это в свою очередь приведет к частоте кадров 2,5 кГц или времени экспозиции 0,4 мс. Такие показатели могут быть легко получены с использованием CMOS-системы. Подвижная линза 102 может, например, представлять собой линзу на салазках DVD привода, которая имеет обычное время доступа 15 мс (66 Гц). В то время как блок привода DVD имеет разрешение около 20 нм, требуется разрешение лишь примерно 20 мкм. Эти менее строгие требования в отношении разрешения могут также привести к еще более короткому времени доступа. Привод подвижной линзы может перемещать линзу по направлению y,z на 1-2 мм с частотой 5-6 кГц (0,16-0,20 мс). Когда подвижная линза занимает надлежащее место, привод совместно с линзой может провести локальное сканирование по 3D способу, как объяснялось ранее. При правильном позиционировании, опять же, волос можно удалить с помощью любой пригодной технологии.
Ограничивающий временной фактор системы по вышеприведенному описанию - это время доступа подвижной линзы, которое примерно составляет 15 мс. Для типичной бороды человека, в которой имеется примерно 12000 волос, это приведет к тому, что время сбривания составит примерно 3 минуты, что соответствует норме для бритья.
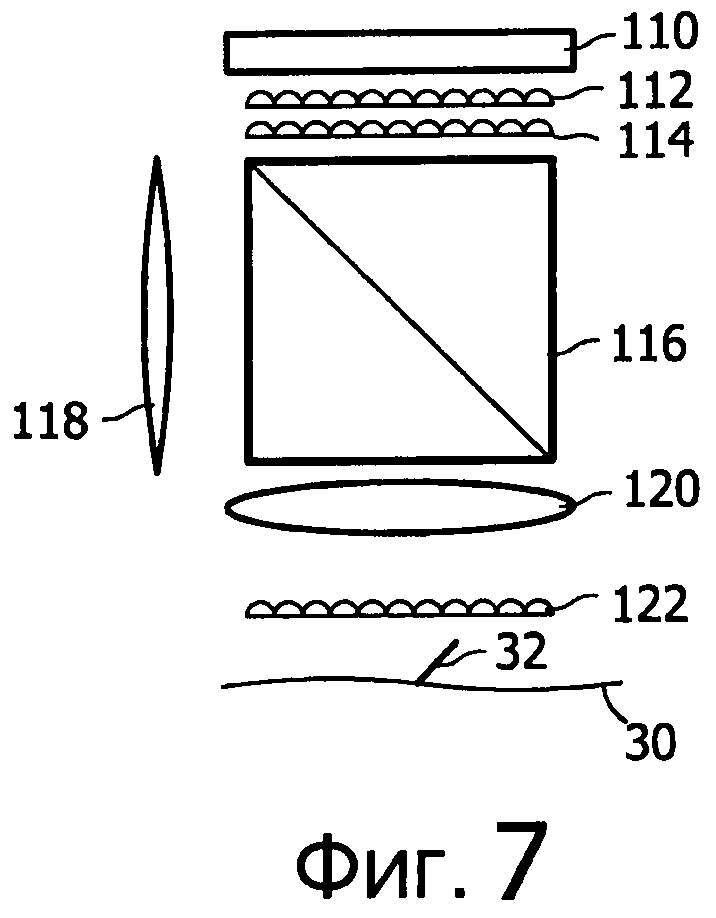
В другой системе для удаления волос, схематично показанной на фиг.7 и 8, используется множество линз, или матрицы линз. В частности, ссылочная позиция 110 относится к датчику изображения (например, CCD/CMOS), в то время как первая, вторая и третья матрицы подвижных линз обозначены 112, 114 и 122 соответственно. Ссылочной позицией 116 обозначен поляризующий расщепитель луча, 118 - кольцевая световая апертура, а 120 - линза. Различные другие компоненты, такие как световые источники, λ/4-пластинка, блок управления и т.д., не показаны. Ссылочной позицией 30 обозначена кожа, на которой имеется волос 32.
Система, показанная на фиг.7, иллюстрирует первый этап отображения, этап 2D-отображения. Апертуры третьей матрицы 122 линз проецируются линзой 120 на апертуры второй матрицы 114 линз, которые в свою очередь проецируются на апертуры первой матрицы 112 линз, а те в свою очередь проецируются на датчик 110 изображения. Теперь изображение объекта, в этом случае кожи 30, проецируется на датчик 110 изображения так, что изображения с отдельных линз каждое само по себе зеркально не отображается. Каждая линза создает малую часть более крупного изображения объекта. В то же время, данная линза 120 проецирует светоизлучающую кольцевую апертуру 118 на третью матрицу 122 линз.
Каждая из матриц линз может быть приведена по существу в идентичное непрерывное движение гармонического характера, например, вращательное или колебательное, в плоскости датчика 110 изображения. В то же время система целиком перемещается латерально по коже 30 пользователем системы для выполнения бритья. В целом, каждая линза трех матриц линз, которая образует единичную «грань» системы отображения, создает проекцию области интереса, или поля обзора, на датчик 110 изображения в повторяющемся режиме.
Каждая точка объекта 30, 32 в поле обзора третьей матрицы 122 линз предпочтительно, но не исключительно, отображается с такой частотой, что латеральное перемещение от одного скана к другому в силу осуществляемого пользователем латерального перемещения примерно эквивалентно намеченному латеральному целевому разрешению, равному, например, 20 мкм, и не превышает его значительно.
Датчик 110 претерпевает то же самое латеральное перемещение, что и матрицы линз, но его движение не является гармоническим. Следовательно, изображение объекта 30, 32, проецируемого на датчик 110, перемещается с той же скоростью в латеральном направлении, что и линзы матриц линз в сочетании с датчиком изображения, при этом гармоническому движению (вращения, колебания и т.д.) подвержены лишь матрицы 112, 114, 122 линз.
В системе, показанной на фиг.7, линза 120 служит проецированию апертур третьей матрицы 122 линз на апертуры второй матрицы 114 линз. С каждой стороны линзы 120, таким образом, оказывается доступным значительный объем пространства, и это пространство может быть использовано для второго этапа процесса детектирования, который будет описан ниже, и для световой связи, которая требуется для формирования изображения.
Для последней цели в данном случае используется поляризующий расщепитель 116 луча. Свет, излученный кольцевой световой апертурой 118 и подаваемый, например, волоконной оптикой, от (галогенной) лампы накаливания, одного или нескольких LED и т.п., проецируется с помощью дополнительной линзы 120 на апертуры третьей матрицы 122 линз так, что каждая линза этой матрицы подсвечивает свое соответствующее поле обзора более или менее однородным образом. На практике это можно достичь путем визуализации света от кольцевой световой апертуры 118 в задней фокальной плоскости линз третьей матрицы 122 линз. Это предпочтительно осуществляется путем обеспечения того, что свет, испускаемый от апертуры 118, распределяется схоже с распределением множества линз. Этому будет дано пояснение со ссылкой на фиг.8, где показана матрица линз.
В численном примере, показывающем технические возможности, предполагается, что требуемое разрешение составляет 20 мкм, хотя, конечно же, можно использовать и другие значения. Скорость, с которой пользователь перемещает систему по коже, принята равной не более 5 см/с. Опять же, в иных случаях эти значения могут быть изменены, что приведет к соответствующим изменениям в следующих цифрах.
Допустим далее, что матрицы линз состоят из диска диаметром около 2 см с множеством 2 мм апертурных линз, равномерно разнесенных по окружности, как показано на фиг.8. Хотя показано 16 линз, в этом численном примере предполагается наличие 25 линз. Для того чтобы отсканировать изображение по всему кольцу один раз, кольцо с линзами должно совершить поворот на 360/25=14,4 градуса, как показано стрелкой D. Следовательно, чтобы достичь требуемого разрешения 20 мкм по всему полю при скорости перемещения устройства 5 см/с, диск должен вращаться с частотой около 100 Гц, так чтобы область отображалась каждые 0,020/50 с = 400 мкс, или с частотой обновления 2,5 кГц. 2D изображения регистрируются с помощью датчика 110 изображения, такого как CCD или CMOS датчик изображения, и предпочтительно при той же частоте обновления (2,5 кГц), чтобы динамические искажения были минимальны. Кроме того, требуется, по меньшей мере, 1000×1000 пикселей для обеспечения того, что поверхностная площадь 2×2 см будет отображена с разрешением 20 мкм. Как эти цифры, так и необходимая скорость обновления легко достигаются с использованием современных CCD- и CMOS-технологий. Очевидно, что возможны другие формы и величины для диска, количества и апертур линз и т.д., что потребует изменить другие цифры.
Этап отображения, описанный выше, представляет собой первый этап в полном процессе отображения, в котором получают 2D-изображение. Заметим, что разрешение 20 мкм или схожее значение на этом этапе еще не требуется. Можно выбрать более низкое разрешение с меньшим временем сбора данных, поскольку может быть получено примерное местонахождение цели. Более точное местонахождение при требуемом разрешении может быть получено на втором этапе отображения, т.е. с использованием второго датчика изображения.
На втором этапе отображения наличие конкретной цели, такой как волос, либо детектируется на конкретной и фиксированной глубине (или z координате), либо сканируется в целях определения ее положения и ориентации в пространстве. Эти опции могут быть выбраны для каждой системы для удаления волос по изобретению. В приведенном здесь примере выбрана первая опция, например, для сбривания волос на определенной длине. Присутствие цели на определенной глубине определяется, например, с помощью конфокального лазерного сканирования с использованием кросс-поляризации. Для этой цели лазерный луч наводят через отобранную линзу третьей матрицы 122 линз. Эта отобранная линза сфокусирует лазерный луч в точке, которая перемещается параллельно движущейся линзе, т.е. совершая вращение, колебания и т.п. Линза коллимирует свет, отраженный назад от фокального объема. Когда такая первая отобранная линза полностью выходит за пределы действия лазерного луча, вторая, соседняя линза заходит в зону действия лазерного луча и выполняет новое сканирование. Разрешение в латеральном направлении при детектировании, таким образом, обусловлено разрешением конфокального сканирования, а расстояние между последовательными сканами определяется скоростью, с которой система как единое целое перемещается по целевой области кожи. Интенсивность отражения ортогонально поляризованного света, который отражается или рассеивается назад от целевой области, конфокально детектируется посредством поляризующего расщепителя 116 луча и сочетания «линза-точечное отверстие», которое здесь не показано, но показано на фиг.5. Количество света, захваченного детектором, а также его изменение как функция положения линзы, а, следовательно, функция времени, может предоставить информацию о наличии различных структур в фокальной области (поле обзора) и тем самым определить их 3D положение и/или ориентацию.
В варианте осуществления лазерной бритвы система может функционировать следующим образом. Первый датчик изображения детектирует изображение кожи, имеющей волос, а блок управления, который не показан, но либо встроен в микросхему (CMOS), либо как отдельный модуль, определяет примерное положение волоса или волос на коже. Точность может составлять примерно 100 или 200 мкм. Когда такое грубое положение установлено, блок управления может направить детектирующий лазер, например, посредством отклоняющего блока (не показан, но обозначен позициями 52, 54 на фиг.3), такого как MOEMS (микрооптоэлектромеханическая система) или подвижного зеркала иного типа, а также дихронного зеркала между третьей вращающейся матрицей 122 линз и линзой 120, в направлении местоположения на вращающейся матрице линз, где обнаружен волос в грубом приближении.
Далее, блок управления записывает результаты конфокального лазерного сканирования и интерпретирует результаты, т.е. выполняется второй этап отображения. Когда присутствие и положение волоса установлены с помощью способа 3D детектирования с применением кросс-поляризации, и когда определено, что положение волоса относительно фокуса линзы удовлетворяет требуемой точности, система обнаружения активирует режущий лазер, который испускает непрерывное или пульсирующее лазерное излучение, поступающее в линзу коллинеарно или под известным углом, и, таким образом, сфокусированное в первоначальное фокальное пятно детектирующего лазера или на известное расстояние от этого фокуса, соответственно. Излучением режущего лазера далее волос срезается.
Различные аспекты способов и устройств по приведенному описанию, не прибегая здесь к упоминанию о них в явном виде, могут применяться и варьироваться специалистом. Например, ясно, что предпочтительно луч детектирующего лазера должен проходить только через одну линзу матрицы линз или матриц линз в каждый момент времени; другими словами диаметр лазерного луча предпочтительно меньше шага расположения линз, чтобы избежать неоднозначных результатов детектирования. Кроме того, форма диска 130, число, шаг расположения и размер линз 132, их перемещение и т.д. могут изменяться в данном способе, если при этом должным образом изменяются соответствующие требуемые количественные параметры и пр. Выражаясь точнее, вышеописанный пример лишь служит иллюстрацией применимости системы для удаления волос. Кроме того, во всех перечисленных примерах предпочтительный способ удаления волос заключался в их срезании лазерным лучом. Однако в контексте изобретения возможны также другие способы удаления волос, такие как электродепиляция, или только нанесение повреждения волосам или их корням и т.д. Во всех случаях, требуется знание точного положения, а иногда также и ориентации отдельных волос для их удаления. Нахождение этого положения, в особенности в трех измерениях, может занять много времени. Окончательное 3D-положение может быть найдено путем использования первых двух координат первого этапа отображения и добавлением третьей координаты на втором этапе отображения, либо все три координаты могут быть определены на втором этапе после первой грубой оценки на первом 2D-этапе и т.д.
Настоящее изобретение обеспечивает систему, которая включает в себя признаки по предотвращению подачи светового луча в один и тот же волос более одного раза. Ниже описаны несколько вариантов осуществления изобретения, которые сопровождаются более подробными примерами изобретения.
Процесс срезания может быть заблокирован временно и/или локально. Блокирование процесса срезания может выполняться, например, путем введения заданной задержки между последовательными подачами светового луча. Если световой источник системы включает в себя, например, лазер, обычно требуется определенное время для обеспечения кристалла лазера достаточным запасом энергии, чтобы вывести кристалл (снова) на заданный энергетический уровень. В зависимости от области применения, заданный энергетический уровень должен быть достаточным для создания лазерного луча, способного срезать волос или разрушить корень волоса. Благодаря времени, необходимому для повторного сообщения энергии кристаллу лазера, т.е. времени задержки, лазер не будет в состоянии снова сработать. Время задержки может регулироваться для соответствующей области применения с помощью интегральной схемы, включающей в себя емкости или иное средство задержки сигнала.
Включение в состав схемы задержки может быть осуществлено, например, в сочетании с кристаллом лазера, который по существу покрывает поле обзора полностью, или с лазерным диодом в сочетании с механизмом адресации.
В другом варианте осуществления в состав системы входит запоминающее устройство. Запоминающее устройство регистрирует, например, моменты времени, в которые испускается лазерный импульс, и/или координаты цели лазерного луча на коже. Координаты цели на коже объединяются, образуя «карту» кожи, в которую включены все обнаруженные волосы. Последующий импульс будет заблокирован, пока не истечет заданное время блокировки.
Время блокировки определяется на основе ряда параметров. Параметры могут включать в себя один или несколько из следующих: расчетная скорость устройства относительно кожи в процессе эксплуатации (скорость бритья), требуемое разрешение при обнаружении волос, скорость обновления датчика или датчиков, количество линз, а также средний диаметр целевого волоса.
В качестве примера предположим, что скорость бритья v примерно равна 50 мм/с. Для того, чтобы получить разрешение при детектировании res., равное примерно 20 мкм, кожа должна отображаться с частотой f, равной примерно f=v/res=2500 Гц. Время между последовательными моментами обнаружения составит примерно t=1/2500=0,4 мс.
Целевой волос может иметь диаметр около 150 мкм. При скорости бритья около 50 мм/с система способна обнаружить волос в течение примерно (150 мкм/50 мм/с)=3 мс. При указанных параметрах система может обнаружить волос максимум (3 мс/0,4 мс+1)=7+1=8 раз. Система для удаления волос предпочтительно испускает световой импульс в середину волоса. Система, таким образом, может быть настроена на ожидание, например, в течение примерно 1,5 мс после первого обнаружения, испускание затем светового импульса, а вслед за этим блокирование в течение времени блокировки, составляющем около 2 мс.
Вышесказанное служит лишь примером. Другой целевой волос может иметь существенно больший диаметр, например, 500 мкм, или меньший диаметр. Блок 18 управления может при необходимости включать в себя ряд заданных параметров настройки, при этом каждая настройка оптимизируется, например, для определенного диаметра волоса и/или плотности волос на коже. Таким образом, система может быть использована различными людьми и для различных частей тела.
С использованием вышеупомянутой карты, в которую включены все координаты на коже, хранящиеся в запоминающем устройстве, процесс стрижки волос может быть заблокирован для определенных адресуемых местоположений. Пример адресуемой матрицы LED приведен ниже.
В одном варианте осуществления система выполнена с возможностью прерывания сигналов, подаваемых на один или несколько световых источников. Управляющая схема для управления световым источником, например, может блокировать управляющий сигнал на соответствующие световые источники.
В другом варианте осуществления система включает в себя средство, не позволяющее лучу достигнуть фотодетектора. Свет блокируется, например, на заданный период времени, либо пока уровень сигнала обнаружения волоса не снизится ниже заданной величины. Примеры приводятся ниже.
В еще одном варианте осуществления система включает в себя средства отклонения, которые расположены между системой и кожей. Средства отклонения выполнены с возможностью отклонять свет. Средства отклонения включают в себя, например, окно прозрачности, которое становится «непрозрачным» спустя заданное время. На средство отклонения может быть подан управляющий сигнал. Управляющий сигнал включает в себя, например, радиочастотный сигнал, имеющий определенную длину волны, либо регулируемую температуру. Жидкокристаллический дисплей позволяет блокировать свет в заданных местоположениях, которые содержатся, например, на вышеупомянутой карте кожи.
В дополнительном варианте осуществления система включает в себя, например, программу системы программного обеспечения для распознавания многократного обнаружения одного и того же волоса. Запоминающее устройство регистрирует сигнал обнаружения волоса для каждого адресуемого местоположения, чтобы составить карту местоположений и волос на коже. Используя эту карту, программа может распознать, находятся ли сигналы обнаружения в пределах определенного заданного минимального расстояния друг от друга, что, таким образом, указывает на многократное обнаружение одного и того же волоса. Карта в запоминающем устройстве может также указывать на то, был ли испущен световой луч в определенный волос. Программа в этом случае не допустит, чтобы система снова направила световой луч на соответствующий волос.
Конкретные примеры реализации вышеописанных вариантов осуществления изложены ниже со ссылкой на фиг.9-11.
Пример 1
Обнаружение волоса и срезание волоса может быть временно заблокировано с использованием средств отклонения, расположенных между волосом и световым источником.
На фиг.9а и 9b показана матрица 200 LED, содержащая множество светоизлучающих диодов 202. Каждый LED 202 соединен с управляющей схемой (например, схемой 18 управления на фиг.1) посредством проводки 204. Каждый LED, таким образом, может быть включен или выключен отдельно. На этой фигуре также показана матрица 210 линз, содержащая множество линз 212. Эту матрицу линз можно сравнить, например, с матрицей 122 линз, показанной на фиг.7. Линзы 212 матрицы 210 линз фокусируют свет, испущенный светоизлучающими диодами 202 на местоположение цели, такой как волос.
Жидкокристаллическая матрица 214 расположена между матрицей 200 LED и матрицей 210 линз. Жидкокристаллическая матрица 214 включает в себя множество жидкокристаллических элементов 216, по одному на каждый LED 202 и/или линзу 212. Жидкокристаллические элементы 216 соединены со схемой 18 управления посредством проводки (не показана) и могут управляться отдельно друг от друга. В первом состоянии жидкокристаллические элементы обладают прозрачностью, позволяя свету проходить и следовать заданной траектории 220 света (фиг.9b). Во втором состоянии жидкокристаллические элементы отклоняют проходящий свет от траектории 220 света, например, по направлению стрелок 222, 224 (фиг.9b).
Схема 18 управления может переключать жидкокристаллические элементы из первого состояния во второе состояние и наоборот. Жидкокристаллическая матрица 214 и жидкокристаллические элементы 216 представляют собой примеры вышеупомянутого средства отклонения. Если один из жидкокристаллических элементов 216 пребывает во втором состоянии, проходящий свет будет отклонен и не достигнет ни волоса/кожи, ни CCD 110, в зависимости от местонахождения жидкокристаллической матрицы в системе.
Средство 214 блокирования (фиг.9а, 9b) может включать в себя любой другой материал, способный переключаться из состояния прозрачности в другое, светоотклоняющее состояние. В число примеров таких материалов входят:
- термически обратимые светорассеивающие материалы (Thermally Reversible Light Scattering, TRLS);
- золь-гели.
TRLS-материал представляет собой термочувствительный материал, который изменяет по существу оптически прозрачное состояние на по существу оптически непрозрачное состояние при заданной температуре и который обратно становится по существу оптически прозрачным при охлаждении ниже второй заданной температуры. TRLS-материалы доступны в виде пленок, которые могут обратимо переходить из непрозрачного состояния в прозрачное состояние. Для индуцирования перехода можно локально изменять температуры путем фокусирования света в одно или несколько мест.
TRLS-материал может включать в себя дисперсию органических кристаллов в термоотверждаемом материале или полимер. TRLS-материал может поглощать энергию (лазера) при достижении целевой температуры. В одном варианте осуществления полимер или смесь полимеров входят в состав кожного пластыря. Полимер или смесь полимеров прозрачны или по существу прозрачны при температуре окружающей среды. Лазерное излучение или схожая форма энергии, пригодная для фотодинамического срезания волос, направляется сквозь кожный пластырь на целевую ткань, как описано выше. По мере того как ткань в целевой области поглощает энергию терапевтического света, ее температура начинает повышаться. Таким же образом начинает повышаться температура кожного пластыря.
При нагреве до температуры выше пороговой, полимер или смесь полимеров изменяют оптические свойства, и полимер или смесь полимеров становятся светоотражающими, светопоглощающими или светорассеивающими, снижая тем самым дальнейшее энергетическое воздействие. По мере того как энергия, поглощенная тканью, диссипирует, температура целевой области снижается, и кожный пластырь снова становится пропускающим или по существу пропускающим, тем самым позволяя продолжить процесс срезания, практически неослабно. Путем использования соответствующего кожного пластыря истинная температура целевой ткани может тщательно контролироваться, при этом можно избежать отрицательных побочных эффектов от чрезмерного воздействия светового источника и выполнить процесс стрижки волос без перерыва.
Золь-гели включают в себя материалы, способные обеспечить фазовый переход золь-гель. Золь-гели включают в себя, например, водные растворы полимеров, которые преобразуются в гели путем изменения условий окружающей среды, таких как температура и кислотность (pH), что в реальных условиях приводит к образованию гидрогеля. Когда гидрогель образуется под воздействием физиологических условий, он может сохранять свою целостную структуру в течение требуемого периода времени.
Целесообразно обобщить полимерные системы, претерпевающие переход золь-гель, в особенности благодаря температуре, выделяя при этом механизмы, лежащие в основе перехода, а также потенциальные аспекты доставки. Золь-гели включают в себя, например, полимерные системы на основе природных или модифицированных природных полимеров, N-изопропилакриламидных полимеров, поли(этиленоксидных)/поли(пропиленоксидных) блок-сополимеров, а также поли(этиленгликолевых)/поли(лактидно-гликолидных) блок-сополимеров.
Согласно фиг.7, средство 214 отклонения может устанавливаться в любом удобном месте в системе для удаления волос. Например, но не только:
i) между кожей 30 и матрицей 122 линз;
ii) между матрицей 122 линз и линзой 120;
iii) между линзой 120 и расщепителем 116 луча;
iv) между световым источником (или апертурой 118) и расщепителем 116 луча; либо
v) между CCD 110 и линзой 112.
С одной стороны, средство отклонения может предотвратить многократное обнаружение определенного волоса путем отклонения света от траектории 220 после первого пика сигнала обнаружения. С другой стороны, средство отклонения может не допустить того, чтобы свет достиг средства детектирования, такого как CCD 110.
Пример 2
Система для удаления волос может включать в себя запоминающее устройство для хранения информации по детектированию, относящейся к одному или нескольким избирательным местоположениям на целевом участке кожи. Каждое местоположение является отдельно адресуемым, т.е. световой луч может направляться в любое местоположение по отдельности, не воздействуя на другие местоположения. Запоминающее устройство может входить в состав схемы 18 управления или быть связанным с ней (фиг.1).
В одном варианте осуществления запоминающее устройство включает в себя сдвиговый регистр. Регистр сдвига представляет собой группу триггеров, установленных в линейном порядке, входы и выходы которых соединены между собой так, что данные сдвигаются по линии при активации схемы.
Настоящее изобретение включает в себя, например, сдвиговый регистр с последовательным вводом и последовательным выводом. Это относительно простой тип регистра сдвига. Строка данных представляется в «данных на входе» и сдвигается вправо на один разряд каждый раз при поступлении команды «сдвига данных». При каждом сдвиге бит в крайнем левом разряде (т.е. «данные на входе») сдвигается на выход первого триггера. Бит в крайнем правом разряде («данные на выходе») сдвигается без сохранения и теряется. Например:
0000
1000
1100
0110
1011
0101
0010
В данной схеме доступны четыре ячейки для хранения информации; следовательно, имеем 4-битный регистр. Чтобы дать представление о схеме сдвига, представим себе, что регистр содержит 0000 (так образом все ячейки являются пустыми). Входные данные «данных на входе» следующие: 1,1,0,1,0,0,0,0. Данные сдвигаются в этом порядке каждый раз при поступлении импульса «сдвига данных». Импульс сдвига данных создается генератором синхроимпульсов, работающим с заданной частотой. Левая колонка соответствует крайнему левому выходному выводу триггера и т.д.
Соответственно, последовательный вывод данных регистра в целом составит 0,0,0,0,1,1,0,1,0,0,0,0 (включая четыре нуля, которые уже содержались в регистре). Если продолжить вводить данные, на выходе будет точно то, что вводится, однако со смещением на четыре цикла «сдвига данных». Такая схема является эквивалентом аппаратного или программного обеспечения выстраивания в очередь. Кроме того, весь регистр может быть обнулен в любой момент времени путем задействования выводов сброса.
Такая схема выполняет считывание с разрушением информации, т.е. все данные теряются после того, как они сдвигаются из крайнего правого бита.
Запоминающее устройство, в состав которого входит, например, сдвиговый регистр, может реализовать предохранительное средство и/или средство для детектирования многократных обнаружений одного и того же волоса. Для каждого местоположения на карте запоминающее устройство включает в себя отдельный сдвиговый регистр. Каждое местоположение соответствует, например, площади около 20 квадратных микрон. Совместно сдвиговые регистры формируют карту, содержащую историю обнаружений.
В одном варианте осуществления, всякий раз при обнаружении волоса в определенном местоположении, логическая единица, соответствующая этому местоположению, вводится в сдвиговый регистр.
Таким образом, сдвиговый регистр создает историю обнаружений. Число битов сдвигового регистра и частота генератора синхроимпульсов определяют точность такой истории. Точность также может зависеть от скорости перемещения устройства для удаления волос относительно кожи 30 (фиг.5).
История, создаваемая сдвиговым регистром, может использоваться для распознавания многократных обнаружений одного и того же волоса, что зависит от точности и разрешения системы обнаружения (порядка 10-30 мкм). Например, установочные параметры могут быть такими, что логические единицы, находящиеся в пределах, например, 4 битов друг от друга, рассматриваются как представляющие обнаружение одного и того же волоса. Это означает, что в вышеприведенном примере ввода данных (1,1,0,1,0,0,0,0) все единицы находятся в пределах четырех битов друг от друга и рассматриваются как представляющие обнаружение одного и того же волоса. После последней единицы входные данные содержат серию из четырех нулей. Если входные данные затем будут содержать 1, эта единица будет рассматриваться как обнаружение другого волоса.
Помимо распознавания многократных обнаружений, история также повышает достоверность обнаружения. В конечном итоге, достоверность обнаружения будет выше, если один и тот же волос обнаружен несколько раз. Чтобы избежать «залпа» по несуществующему волосу и повысить точность, настроечные параметры системы для удаления волос могут, таким образом, предусматривать «залп» по волосу, который обнаружен, например, дважды или трижды.
Пример 3
Система по настоящему изобретению включает в себя, например, средства электронной задержки (не показано). Средства электронной задержки выполнены с возможностью задержки передачи сигнала в соответствующее местоположение в системе для удаления волос.
Вышеописанный сдвиговый регистр может быть включен в состав средств электронной задержки. Для каждого местоположения на карте средства электронной задержки включают в себя отдельный сдвиговый регистр. Вместо ввода 1 при обнаружении волоса, в каждом соответствующем сдвиговом регистре предусмотрена логическая единица всякий раз при инициации светового импульса в соответствующем местоположении, а также логический ноль, если световой импульс отсутствует. Процесс срезания временно блокируется в соответствующем местоположении до тех пор, пока сдвиговый регистр содержит логическую единицу. Процесс срезания снова становится возможен, если регистр содержит ряд нулей (0).
Число битов в сдвиговом регистре совместно со скоростью обновления битов в регистре (частотой генератора синхроимпульсов), определяют время задержки процесса срезания.
Пример 4
В другом варианте осуществления средства электронной задержки включают в себя фильтр, такой как пассивную RC-цепь. Фильтр включает в себя, по меньшей мере, одну емкость С, а также может включать в себя один или несколько резисторов R и/или индуктивных элементов. Если система обнаруживает волос в определенном местоположении в момент времени t1 в первый раз (см., например, фиг.3), схема управления заряжает емкость RC-цепи соответственно этому местоположению. Емкость заряжается до заданного пикового уровня 230 детектирования (фиг.10а). После зарядки емкость будет разряжаться. В момент времени t2 заряд емкости снизится ниже заданной пороговой величины 232, образуя заданное время разрядки tdelta. В нашем случае t2-t1=tdelta.
До тех пор, пока заряд емкости выше пороговой величины 232, схема 18 управления подает сигнал 234 блокировки на высоком логическом уровне 1 (фиг.10b). Если заряд емкости снизился ниже пороговой величины 232, т.е. в примере на фиг.10а до t1 и после t2, схема 18 управления подает сигнал блокировки на низком логическом уровне 0 (фиг.10b). При обнаружении волоса будет подан один световой импульс. После этого, схема управления блокирует достижение световым лучом того же самого волоса повторно до тех пор, пока сигнал 234 блокировки находится на высоком уровне 1, т.е. в течение tdelta.
Блокирование достижения световым лучом волоса в настоящем описании может содержать любое средство, например, блокирование испускания света световым источником, блокирование светового луча на любом этапе между световым источником и волосом (сравни с фиг.9а) или блокирование сигнала обнаружения.
RC-цепь может также заряжаться до пикового уровня 230 в первый момент времени t1, а также в каждый последующий момент времени t2, когда обнаруживается волос (фиг.11а). В промежутке между последовательными обнаружениями емкость разряжается. До тех пор, пока заряд емкости остается выше пороговой величины 232, схема 18 управления обеспечивает оцифрованный сигнал 240 обнаружения на высоком логическом уровне 1 (фиг.11b). Когда заряд емкости становится ниже порогового 232, оцифрованный сигнал 240 обнаружения принимает низкий логический уровень 0.
Схема управления подает также сигнал 242 блокировки (фиг.11с). После обнаружения волоса в момент времени t1 сигнал блокировки остается на низком логическом уровне 0 в течение заданного времени, например, до момента времени t2. Пока сигнал блокировки является низким, световой луч от светового источника имеет возможность достичь волоса. Поскольку оцифрованный сигнал 240 обнаружения остается высоким до момента времени t2, схема управления повышает сигнал блокировки до высокого логического уровня 1, до тех пор, пока оцифрованный сигнал обнаружения сохраняет высокий уровень 1. Когда сигнал блокировки имеет высокий уровень, свет от светового источника не может достичь волоса. Срезание, таким образом, блокируется, например, любым из вышеописанных способов. Когда сигнал обнаружения (фиг.11а) снижается ниже порогового, или когда оцифрованный сигнал обнаружения возвращается к низкому уровню 0, схема управления снижает сигнал блокировки до низкого уровня 0.
Хотя изобретение было описано выше со ссылкой на ручную систему для удаления волос, включающую в себя устройство отображения, содержащее датчик изображения, система может включать в себя иные средства для определения координат излучения обрабатывающего светового луча. Система по настоящему изобретению также пригодна для систем, включающих в себя такие иные средства определения. Примеры таких систем определения поясняются ниже. В системах определения предпочтительно используются работающие в реальном масштабе времени и неинвазивные технологии наведения на цель.
Средства определения могут обнаружить волосы на основе, например, отражений от кожи. Если площадь участка кожи, который должен быть обработан, достаточно мала, отражения от кожи будут существенно отличаться в присутствии волоса. Отражения от кожи сравниваются со справочными отражениями от кожи, которые хранятся в запоминающем устройстве системы, чтобы определить присутствие одного или большего числа волос.
Изобретение было описано и пояснено со ссылкой на примеры вариантов осуществления и на фигуры. Однако многие модификации вышеописанных вариантов осуществления возможны в объеме притязаний прилагаемой формулы изобретения. Например, признаки соответствующих вариантов осуществления могу быть объединены. Объем изобретения определяется прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ВОЛОСАМИ С ДАТЧИКОМ ВОЛОС НА ОСНОВЕ СВЕТА | 2013 |
|
RU2631195C2 |
| ОПТИЧЕСКОЕ ЛЕЗВИЕ И УСТРОЙСТВО ДЛЯ СРЕЗАНИЯ ВОЛОС | 2010 |
|
RU2533523C2 |
| УСТРОЙСТВО ОБРАБОТКИ КОЖИ НА ОСНОВЕ СВЕТА | 2017 |
|
RU2741466C1 |
| УСТРОЙСТВО ОБРАБОТКИ КОЖИ НА ОСНОВЕ СВЕТА | 2017 |
|
RU2766165C2 |
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ВОЛОСАМИ С ДЕТЕКТОРОМ ВОЛОС | 2012 |
|
RU2639029C2 |
| УСТРОЙСТВО ДЛЯ УХОДА ЗА КОЖЕЙ НА ОСНОВЕ СВЕТА | 2019 |
|
RU2772832C2 |
| УСТРОЙСТВО ДЛЯ СРЕЗАНИЯ ВОЛОС | 2013 |
|
RU2634294C2 |
| УСТРОЙСТВО СВЕТОВОЙ ОБРАБОТКИ ТКАНИ | 2017 |
|
RU2727588C1 |
| ДЕТЕКТОР ВОЛОС СО МНОЖЕСТВОМ ФОКАЛЬНЫХ ТОЧЕК | 2012 |
|
RU2610885C2 |
| УСТРОЙСТВО ДЛЯ СРЕЗАНИЯ ВОЛОС | 2012 |
|
RU2612866C2 |
Изобретение относится к медицинской технике, а именно к средствам для удаления волос. Система для удаления волос содержит устройство обнаружения волос на участке кожи, подлежащего обработке, функционально связанное с ним устройство для удаления волос, включающее световой источник для формирования светового импульса, световодное средство для направления светового импульса к цели на волосах, блок управления, определяющий местонахождение цели и активирующий световой источник в течение периода времени, на котором устройство обнаружения волос способно обнаружить волосы. Кроме того, система содержит предохранительные средства, связанные с блоком управления и выполненные с возможностью предотвращения повторного направления следующего светового импульса на волосы по меньшей мере частью устройства обнаружения волос или устройством для удаления волос в течение периода принятия предохранительных мер, на протяжении которого устройство обнаружения волос способно обнаружить волосы и начинающегося после того, как световой импульс был направлен в местонахождение цели. Использование изобретения позволяет снизить потребление мощности и возможность повреждения кожи за счет предотвращения наведения режущего светового луча на один и тот же волос более одного раза. 14 з.п. ф-лы, 16 ил.
1. Система для удаления волос, содержащая:
устройство обнаружения волос для обнаружения волоса на участке кожи (30), подлежащего обработке;
устройство (20; S3) для удаления волос, функционально связанное с устройством обнаружения волос и включающее в себя световой источник для формирования светового импульса, а также световодное средство для направления светового импульса от светового источника в местонахождение цели на волосах; и
блок (18) управления, связанный с устройством обнаружения волос и устройством (20; S3) для удаления волос, так чтобы управлять их работой, при этом блок управления определяет местонахождение цели и активирует световой источник для формирования светового импульса в течение периода времени, на котором устройство обнаружения волос способно обнаружить волосы,
отличающаяся тем, что содержит
предохранительные средства, связанные с блоком (18) управления и выполненные с возможностью предотвращения повторного направления следующего светового импульса на волосы по меньшей мере частью устройства обнаружения волос или устройством для удаления волос в течение периода принятия предохранительных мер, на протяжении которого устройство обнаружения волос способно обнаружить волосы, и начинающегося после того, как световой импульс был направлен в местонахождение цели.
2. Система для удаления волос по п.1, в которой устройство обнаружения волос содержит устройство отображения, содержащее первый датчик (12; S1) изображения, который выполнен с возможностью детектирования изображения участка кожи (30), подлежащего обработке, а блок управления выполнен с возможностью распознавания волоса на изображении.
3. Система для удаления волос по п.1, в которой предохранительные средства содержат средства электронной задержки для реализации упомянутого периода принятия предохранительных мер.
4. Система для удаления волос по п.3, в которой средства электронной задержки содержат сдвиговый регистр.
5. Система для удаления волос по п.3, в которой средства электронной задержки включают в себя фильтр, содержащий, по меньшей мере, одну емкость, и блок управления выполнен с возможностью зарядки емкости до пикового уровня (230), который выше порогового уровня (232), после того как блок управления распознал соответствующие волосы в первый раз.
6. Система для удаления волос по п.5, в которой время, в течение которого емкость заряжается до уровня выше порогового, определяет период принятия предохранительных мер.
7. Система для удаления волос по п.5, в которой блок управления выполнен с возможностью зарядки емкости всякий раз, когда обнаруживается один и тот же волос.
8. Система для удаления волос по п.5, в которой блок (18) управления выполнен с возможностью преобразования заряда емкости в оцифрованный сигнал (240) обнаружения, имеющий высокий логический уровень, когда заряд емкости выше порогового уровня, и низкий логический уровень, когда заряд емкости ниже порогового уровня.
9. Система для удаления волос по п.8, в которой блок управления выполнен с возможностью обеспечения сигнала (242) блокировки для блокирования удаления волос, когда оцифрованный сигнал обнаружения находится на высоком логическом уровне в течение времени, более длительном, чем заданное время обнаружения.
10. Система для удаления волос по п.1, в которой предохранительные средства содержат запоминающее средство, связанное с блоком управления.
11. Система для удаления волос по п.10, в которой запоминающее средство содержит сдвиговый регистр.
12. Система для удаления волос по п.1, в которой предохранительные средства содержат средства отклонения, связанные с блоком управления, и при эксплуатации системы для удаления волос средства отклонения располагающиеся:
между кожей (30) и устройством обнаружения волос и/или
между кожей (30) и устройством для удаления волос,
при этом предохранительные средства имеют первое состояние, при котором свет может проходить в заданном направлении, и второе состояние, при котором свет отклоняется от заданного направления.
13. Система для удаления волос по п.12, в которой средства отклонения содержат жидкокристаллическое устройство.
14. Система для удаления волос по п.13, дополнительно содержащая матрицу световых источников (200), при этом жидкокристаллическое устройство содержит жидкокристаллическую матрицу (214), имеющую жидкокристаллические элементы (216), и каждый жидкокристаллический элемент (216) работает совместно с одним соответствующим световым источником (202) матрицы световых источников (200).
15. Система для удаления волос по п.12, в которой отклоняющие средства содержат термически обратимый светорассеивающий материал (TRLS) или золь-гель.
| US 6676654 B1, 13.01.2004 | |||
| US 4880001 A, 14.11.1989 | |||
| US 4216775 A, 12.08.1980 | |||
| US 2004158300 A1, 12.08.2004 | |||
| US 6172795 B1, 09.01.2001 | |||
| EP 1031324 A, 30.08.2000 | |||
| WO 09917668 A, 15.04.1999 | |||
| ЛАЗЕРНЫЙ МЕДИЦИНСКИЙ ПРИБОР | 2000 |
|
RU2181572C2 |
| СПОСОБ УХОДА ЗА ВОЛОСАМИ И КОЖЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2083354C1 |

