Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и устройству обнаружения физических связей между электронными идентификаторами и объектами. Более конкретно, настоящее изобретение относится к способу и устройству для обнаружения физических связей между электронными радиочастотными ярлыками и объектами, например, такими как багаж.
Уровень техники
Как известно, в настоящее время доступна так называемая технология радиочастотной идентификации (RFID), которая позволяет идентифицировать объекты путем использования электронных радиочастотных ярлыков, как правило, известных как метки RFID или транспондеры.
Каждая метка RFID, называемая далее в настоящем документе просто «меткой» для простоты, содержит основу, на которой располагается интегральная схема, антенна, связанная с интегральной схемой, и, возможно, батарея, которая соответственно связана с интегральной схемой. С точки зрения терминологии метки, обеспеченные батареей, известны как «активные метки», в то время как метки без батареи известны как «пассивные метки».
Более конкретно, имея в виду метку, соответствующая интегральная схема содержит электронную память, в которой хранится универсальный идентификатор, взаимно однозначно связанный с меткой, причем идентификатор, как правило, состоит из девяноста шести битов, в основном известных как код ID. В дополнение к коду ID, электронная память может содержать дополнительную информацию.
С эксплуатационной точки зрения, когда метки расположены близко к электронным устройствам считывания, обеспеченным соответствующими антеннами, коды ID связаны с электронными устройствами считывания, в дальнейшем в этом документе называемыми «устройствами считывания». Более того, в случае с пассивными метками, они извлекают энергию, требуемую для их работы, из электронных сигналов, излучаемых устройствами считывания посредством соответствующих антенн.
Еще более подробно, связь между меткой и устройством считывания может происходить альтернативно путем либо индуктивного, либо электромагнитного соединения. В первом случае метки модулируют нагрузку, полученную от соответствующих антенн, в то время как во втором случае они модулируют сопротивление антенн сами; в обоих случаях модуляции происходят в соответствии с кодами ID таким образом, что путем обнаружения вышеупомянутых модуляций нагрузки/сопротивления устройства считывания обнаруживают коды ID на ярлыках.
Еще более подробно, после приема и декодирования сигнала запроса, излученного по меньшей мере одним устройством считывания, каждая метка отвечает, то есть выполняет одну из вышеупомянутых модуляций нагрузки и сопротивления.
В дальнейшем в настоящем документе мы будем ссылаться на формирование событий для указания обнаружения ответов меток устройствами считывания, то есть определение кодов ID устройствами считывания. Другими словами, событие формируется, когда устройство считывания, как только сигнал запроса был излучен, правильно демодулирует код ID, связанный с меткой, который отвечает на такой сигнал запроса.
В не зависимости от деталей осуществления, технология RFID позволяет электронно идентифицировать объекты, как только метки физически связаны с объектами (прикреплены к объектам), путем обнаружения меток. С этой целью, требуется знать объект, с которым физически связана метка. Более того, если связь между заданной меткой и соответствующим объектом может быть обнаружена, идентификация заданной метки позволяет также идентифицировать соответствующий объект.
Более конкретно, известны практические приложения, в которых используются электронные ворота, то есть структуры, через которые пропускают объекты, причем каждые ворота оборудованы по меньшей мере одним устройством считывания, позволяющим обнаруживать связи между метками и объектами. Так как каждое устройство считывания имеет соответствующую зону покрытия, то есть объем, в котором каждое устройство считывания может осуществлять связь (обнаруживать ответы) с возможными метками внутри самого этого объема, но не может осуществлять связь с метками, расположенными за его пределами, то обнаружение связей между метками и объектами может происходить без неопределенностей, если в зоне покрытия находится не более одного объекта/метки.
Например, предположим, что к заданному объекту прикреплена единственная метка, которая находится внутри зоны покрытия считывания, чтобы позволить легко обнаруживать физические связи между метками и объектами. Более конкретно, зоны покрытия устройств считывания оптимизируются в соответствии с практическими приложениями и объектами для монитора.
Однако есть практические приложения, в которых несколько объектов могут перемещаться в одно и то же время внутри зоны покрытия единственного устройства считывания. В таких случаях происходят события, связанные с различными ID, таким образом, электронное обнаружение физических связей между объектами и метками затруднительно, что делает проблематичным использование технологии RFID.
Одним документом, раскрывающим применение технологии RFID для идентификации движущихся объектов, является US 2006/0238352 A1. В частности, документ US 2006/0238352 А1 раскрывает конвейерную систему, выполняющую этапы способа по преамбуле пункта 1 формулы.
Раскрытие изобретения
Задача настоящего изобретения состоит в создании способа и устройства обнаружения физических связей между электронными идентификаторами и объектами, которые по меньшей мере частично решают проблемы, присущие уровню техники.
В соответствии с настоящим изобретением, обеспечены способ и устройство обнаружения физических связей между электронными идентификаторами и объектами, как определено в пунктах 1 и 5 формулы изобретения соответственно.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения, его варианты выполнения описаны в настоящем документе только в качестве неограничивающего примера и со ссылками на сопровождающие чертежи, на которых:
- Фиг.1 схематически изображает вариант выполнения настоящего устройства обнаружения;
- Фиг.2 изображает вид в перспективе части устройства обнаружения, изображенного на Фиг.1;
- Фиг.3, 4, 5 изображают вид спереди, боковой разрез и передний разрез части устройства обнаружения, изображенного на Фиг.1, соответственно;
- Фиг.6 изображает ось времени;
- Фиг.7, 9, 10 и 16 изображают блок-схемы операций в соответствии с настоящим способом обнаружения;
- Фиг.11-15 изображают соответствующие координатные плоскости; причем каждая координатная плоскость имеет ось времени в качестве оси абсцисс, и ось интенсивности - в качестве оси ординат; и
- Фиг.8а-8d и 17а-17b изображают схематически примеры структур данных в соответствии с настоящим способом обнаружения.
Осуществление изобретения
Фиг.1 изображает устройство обнаружения физических связей между электронными идентификаторами и объектами, указанными числами 1 как целое, которое в дальнейшем в данном документе называется «устройство 1» для краткости. В дальнейшем в данном документе только в качестве примера устройство 1 описано со ссылками на случай, в котором объекты являются предметами багажа, хотя настоящее устройство 1 может также с достижением преимущества использоваться и в других областях практического применения и, таким образом, может применяться к объектам любого типа.
Более конкретно, устройство 1 содержит первую транспортерную ленту 2 и ограничительную структуру 4, которая имеет форму квадратного параллелепипеда, выполнена из металлического материала и образует полость 6 (Фиг.2), внутри которой проходит первая транспортерная лента 2, которая может работать либо в непрерывном, либо в прерывном (так называемом «начало и остановка») режиме.
В частности, ограничительная структура 4 имеет шесть поверхностей, две из которых являются частично (не полностью) полыми и далее в данном документе называются «стенкой ввода» и «стенкой вывода», под номерами 8 и 10 соответственно (Фиг.2); остальные четыре стенки называются «боковыми стенками» 12 (Фиг.2). В частности, стенка ввода и стенка вывода 8, 10 имеют квадратную форму и перпендикулярны багажу, передвигающемуся вдоль направления М, определенного первой транспортерной лентой 2, в то время как боковые стенки 12 имеют прямоугольную форму и параллельны направлению М перемещения багажа.
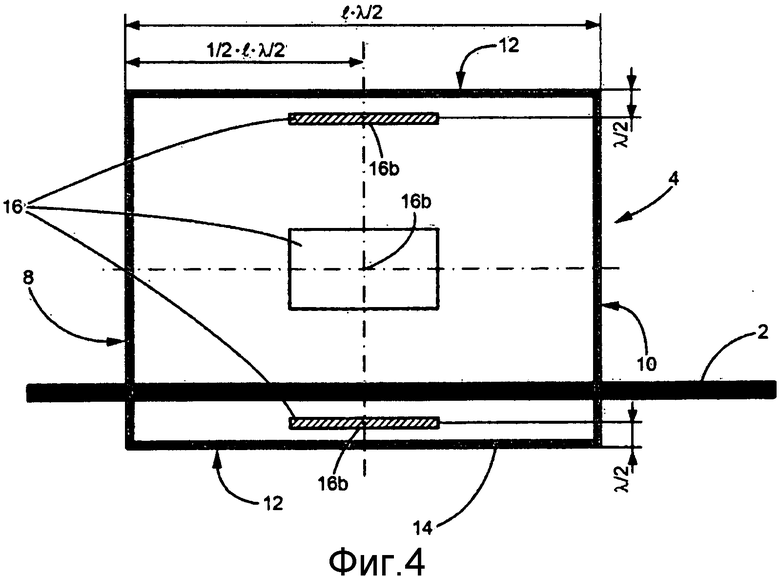
При оси, параллельной направлению М перемещения багажа и, таким образом, перпендикулярной стенкам 8, 10 ввода и вывода, указанной буквой Н, и расчётной длине волны, указанной в виде λ и описанной ниже более подробно, ограничительная структура 4 имеет длину l*λ/2 по оси Н, где l - целое число, равное или больше чем один.
Как подробно изображено на Фиг.3, стенки 8, 10 ввода и вывода имеют длину длинной стороны n*λ/2, которая является величиной, представляющей ширину и высоту ограничительной структуры 4; n также является целым числом, равным или больше чем один. Дополнительно, стенки 8, 10 ввода и вывода имеют соответствующие полые участки, которые имеют форму квадрата и один и тот же центр, как и соответствующие стенки 8, 10 ввода и вывода. Более конкретно, полые участки имеют длину длинных сторон (n-2p)*λ/2, где p - это целое число от одного до n/2-1.
Длина первой транспортерной ленты 2 больше длины ограничительной структуры 4, а ширина w (Фиг.2 и 3) меньше, чем (n-2p)*λ/2. Дополнительно, первая транспортерная лента 2 полностью проходит через ограничительную структуру 4, проходя сквозь полые участки стенок 8, 10 ввода и вывода. Более конкретно, по отношению к направлению М перемещения багажа, первый участок 2а первой транспортерной ленты 2 выходит за пределы ограничительной структуры 4 по ходу перемещения перед ограничительной структурой 4. Такой первый участок 2а имеет длину da (Фиг.2). Дополнительно, второй участок 2b первой транспортерной ленты 2 выходит за пределы ограничительной структуры 4 по ходу перемещения за ограничительной структурой 4. Длина такого второго участка 2b - db (Фиг.2).
Ограничительная структура 4 покрыта с внутренней стороны слоем радиопоглощающего (неотражающего) материала 14 (Фиг.4 и 5). Дополнительно, множество антенн 16 установлены внутри полости 6, причем эти антенны относятся к устройству 20 считывания вместе со считывающим элементом 18, к которому прикреплены антенны 16. Путем примера, описанный вариант выполнения имеет четыре антенны 16.
Антенны 16 расположены близко к боковым стенкам 12 ограничительной структуры 4, с которой они связаны, например, посредством соответствующих диэлектрических разделителей (не показаны). На практике, каждая антенна 16 расположена близко к соответствующей боковой стенке 12, так что антенны 16 окружены первой транспортерной лентой 2.
Антенны 16 относятся к типу, известному в чистом виде, и могут быть оптимизированы для работы на расчётной длине волны λ, например, антенны 16 могут быть микрополосковыми антеннами. Дополнительно, как изображено более подробно на Фиг.4 и 5, при определении соответствующего центра 16b тяжести для каждой антенны 16, каждый центр 16b тяжести совпадает с центром соответствующей боковой стенки 12 и с центром боковой стенки 12, противоположной соответствующей боковой стенке 12. Дополнительно, каждый центр 16b тяжести находится на расстоянии λ/2 от соответствующей боковой стенки 12.
С эксплуатационной точки зрения, антенны 16 формируют соответствующие электромагнитные поля на рабочей частоте f, которой соответствует вышеупомянутая расчётная длина λ волны, которая получается посредством отношения λ = с/f, где с равно скорости света в вакууме. При таких условиях общее электромагнитное поле находится внутри полости 6, образованной ограничительной структурой 4, которая однородна в первом приближении. Кроме того, при первом приближении, такое общее электромагнитное поле ограничено внутри полости 6 и, таким образом, имеет сокращенную амплитуду за пределами ограничительной структуры 4. Это происходит из-за того, что размер ограничительной структуры 4 и расположение антенн 16 заданы так, чтобы минимизировать не совпадающие по фазе отражения электромагнитных полей, формируемые антеннами 16, причем такие отражения вызваны присутствием антенн 16 и внутренних поверхностей боковых стенок 12 ограничительной структуры 4. В этом отношении, чтобы ограничить помехи общего электромагнитного поля, вызванные присутствием первой транспортерной ленты 2, последняя может быть сделана из радиопроницаемого материала, то есть диэлектрического материала, который на рабочей частоте f имеет диэлектрическую постоянную εr при первом реальном приближении. Радиопроницаемый материал, таким образом, не приводит к значительным помехам общего электромагнитного поля, находящегося внутри полости 6.
Устройство 1 дополнительно содержит компьютер 22 и проходное обнаруживающее устройство 24 измерения, сформированное из первого фотоэлемента 24а и кодирующего устройства 24b перемещения. Первый фотоэлемент 24а и кодирующее устройство 24b перемещения 22, так же, как и считывающий элемент 18 устройства 20 считывания, связаны с компьютером. Дополнительно, компьютер 22 может быть связан с внешней системой 32 управления и программируемым логическим контроллером (PLC) 34, который контролирует перемещение первой транспортерной ленты 2.
Более подробно, первый фотоэлемент 24а прикреплен снаружи ограничительной структуры 4, близко к первой транспортерной ленте 2, чтобы обнаруживать возможный проход багажа, переносимого первой транспортерной лентой 2 до того, как этот багаж войдет в ограничительную структуру 4. Другими словами, первый фотоэлемент 24а прикреплен по ходу перемещения перед ограничительной структурой 4 по направлению М перемещения багажа. Расстояние (измеренное по оси Н) между первым фотоэлементом 24а и стенкой 8 ввода обозначается расстоянием dp1 (Фиг.2) и может быть равно нулю; расстояние dp1 может быть 1 см, например. Дополнительно, первый фотоэлемент 24а имеет высоту h (Фиг.2) по отношению к первой транспортерной ленте 2, чтобы обеспечить, как уже было сказано, обнаружение багажа. Высота h может быть, например, 7 см.
Что касается кодирующего устройства 24b перемещения, оно выполняет функцию формирования электрического импульса, когда первая транспортерная лента 2 перемещается простым перемещением. Например, кодирующее устройство 24b перемещения может состоять из зубчатого колеса, функционально связанного с первой транспортерной лентой 2, и электрической цепи, известным образом; альтернативно, и опять для примера, кодирующее устройство 24b перемещения может быть оптического либо магнитного типа. Тем самым, расстояние перемещения, покрытое первой транспортерной лентой 2, то есть расстояние, которое проходит гипотетическая часть багажа, непрерывно перемещаемого по отношению к первой транспортерной ленте 2, за рассматриваемый интервал времени, может быть определено для каждого рассматриваемого интервала времени. Такое расстояние перемещения получается путем умножения простого перемещения на число импульсов, сформированных кодирующим устройством 24b перемещения во время рассматриваемого интервала времени.
Устройство 1 дополнительно содержит второй и третий фотоэлементы 26, 28, которые связаны с компьютером 22 (связи не изображены). В частности, второй фотоэлемент 26 расположен снаружи ограничительной структуры 4, близко к первой транспортерной ленте 2, так чтобы обнаруживать возможный проход багажа, выполняемый первой транспортерной лентой 2, как только багаж вышел из ограничительной структуры 4. Другими словами, относительно направления М перемещения багажа второй фотоэлемент 26 расположен за ограничительной структурой 4. Кроме того, второй фотоэлемент 26, который может быть расположен на той же высоте h, что и первый фотоэлемент 24а, и, как правило, удален на расстояние dp2 (Фиг.2) от стенки 10 вывода. На практике, как качественно изображено на Фиг.1, второй фотоэлемент 26 предпочтительно расположен на стенке 10 вывода, то есть на нулевом расстоянии dp2. В этом отношении, если иначе не обозначено, предположим, что расстояние dp2 равно нулю, не ограничивая общий смысл.
Что касается третьего фотоэлемента 28, он расположен позади второго фотоэлемента 26, от которого он пространственно удален на расстояние dd (Фиг.2), измеренное вдоль направления М перемещения багажа (эквивалентно вдоль оси Н); расстояние dd может быть 110 см, например. Дополнительно, как правило, третий фотоэлемент 28 находится на расстоянии dp3 (Фиг.2) от стенки 10 вывода и может быть расположен на той же высоте h, что и первый фотоэлемент 24а. На практике, предполагается, что dp2=0, поэтому dp3=dd.
При использовании, первая транспортерная лента 2 может принимать багаж, перемещаемый второй транспортерной лентой 38 снаружи устройства 1, которая имеет то же направление М перемещения багажа для первой транспортерной ленты 2 и располагается впереди на первой транспортерной ленте 2 по отношению к вышеупомянутому направлению М перемещения. Подобным образом, вторая транспортерная лента 2 может подавать багаж, перемещаемый третьей транспортерной лентой 40, которая находится снаружи устройства 1, имеет то же направление М перемещения багажа, что и первая транспортерная лента 2, и располагается позади на первой транспортерной ленте 2 по отношению к вышеупомянутому направлению М перемещения.
На практике, первая, вторая и третья транспортерные ленты 2, 38, 40 расположены вдоль той же плоскости и находятся на коротком расстоянии (например, менее 5 см) друг от друга, причем направления перемещения такие, что объект, перемещаемый второй транспортерной лентой 38, потом перемещается первой транспортерной лентой 2 и, наконец, третьей транспортерной лентой 40.
Когда первая транспортерная лента 2 работает, багаж сначала проходит первый фотоэлемент 24а, а затем второй фотоэлемент 26 и, наконец, третий фотоэлемент 28.
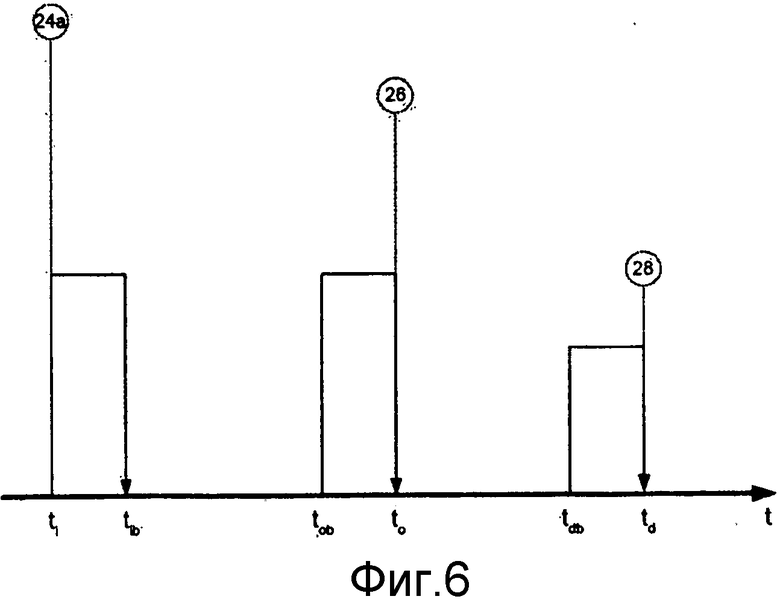
Как изображено для примера на Фиг.6, при рассмотрении перемещения единственного предмета багажа, перемещаемого первой транспортерной лентой 2, такой предмет багажа обнаруживается первым фотоэлементом 24а в момент ti. Более подробно, в момент ti первый фотоэлемент 24а обнаруживает проход багажом точки, которая дополнительно находится позади по направлению М перемещения багажа. Так как багаж имеет значительную длину (измеренную по отношению к направлению М перемещения багажа), первый фотоэлемент 24а затем обнаруживает присутствие предмета багажа на всем протяжении интервала времени, который начинается в момент ti и заканчивается в момент tib. Такой момент tib времени является моментом, когда первый фотоэлемент 24а обнаруживает проход багажом точки, которая дополнительно находится впереди по направлению М перемещения багажа. Далее в настоящем документе даются ссылки на моменты ti и tib как на моменты, когда первый фотоэлемент 24а начинает и заканчивает обнаружение предмета багажа, соответственно.
Подобным образом, не ограничивая общий смысл, предположим, что ограничительная структура 4 длиннее, чем каждый предмет багажа, и второй фотоэлемент 26 начинает обнаружение предмета багажа в момент tob вслед за моментом tib и заканчивает обнаружение предмета багажа в момент to вслед за моментом tob.
Третий фотоэлемент 28 затем начинает обнаружение предмета багажа в момент tdb вслед за моментом to и заканчивает обнаружение багажа в момент td вслед за моментом tdb.
На практике, первый, второй и третий фотоэлементы 24а, 26, 28 формируют первый, второй и третий сигналы фотоэлементов, соответственно, указывающие моменты ti(х), tib(х), моменты to(х), tob(х) и моменты td(x), tdb(x), соответственно, связанные с перемещением каждого предмета багажа х, перемещаемого первой транспортерной лентой.
Кодирующее устройство 24 перемещения вместо этого формирует сигнал перемещения, указывающий перемещение первой транспортерной ленты 2.
Устройство 20 считывания, посредством антенн 16, излучает сигналы запроса. Более подробно, далее предполагается, что устройство 20 считывания работает в непрерывном режиме, то есть излучает сигналы запроса с определенной периодичностью, например, порядка миллисекунд.
При оснащении багажа соответствующими метками, например, пассивного типа, когда эти метки принимают сигналы запроса, излученные устройством 20 считывания, они отвечают известным образом. Опять же известным образом, эти ответы могут быть обнаружены устройством 20 считывания, которое формирует соответствующее событие при каждом обнаружении. Более конкретно, каждый ответ может быть обнаружен соответствующей антенной 16, когда перемещение 18 считывания кооперируется с антеннами 16 так, чтобы объединить антенны 16 во времени.
Каждое событие, таким образом, связывается с соответствующим обнаруженным кодом ID, соответствующим моментом tr обнаружения и указанием (RSSI) интенсивности принятого сигнала. Такой параметр RSSI определяется устройством 20 считывания известным образом и указывает интенсивность ответа метки, обнаруженную устройством 20 считывания.
На практике, при каждом событии, считывающий элемент 18 устройства 20 считывания формирует соответствующий сигнал события, который указывает соответствующий код ID, соответствующий момент tr обнаружения и соответствующий параметр RSSI; такой сигнал события отправляется на компьютер 22.
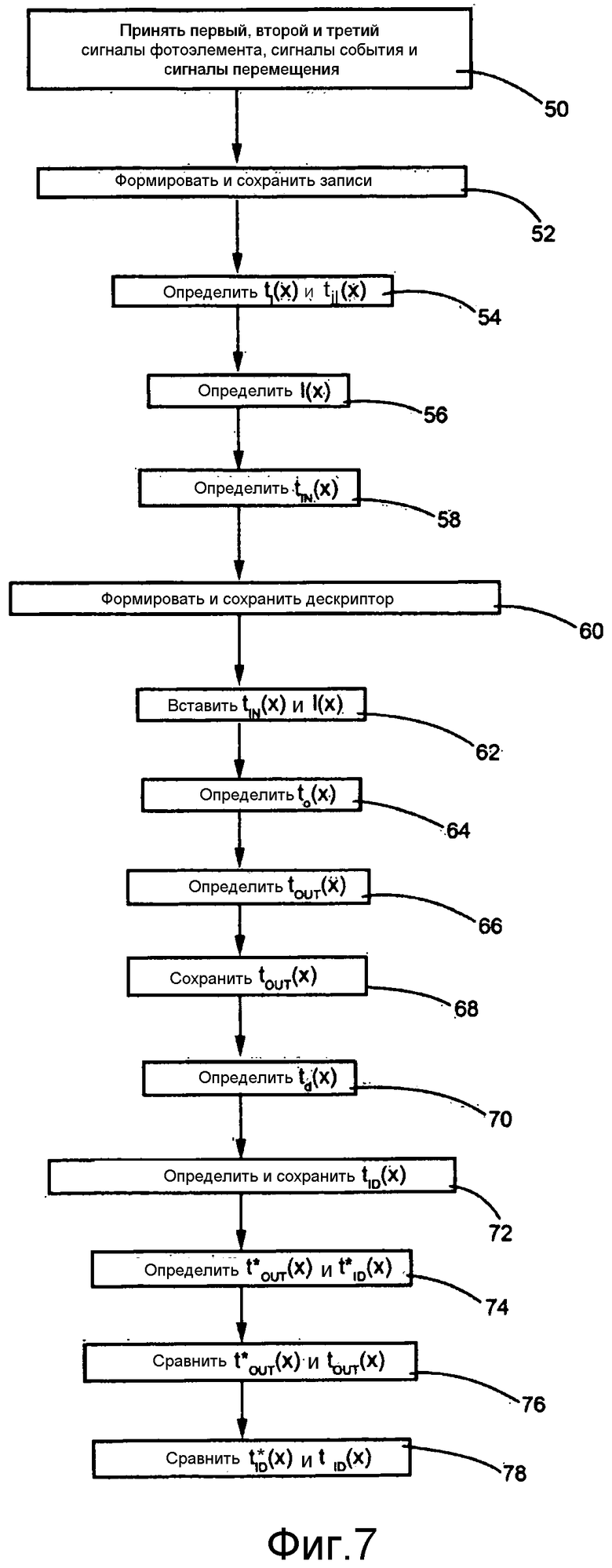
Как изображено на Фиг.7, компьютер 22 приобретает (этап 50) первый, второй и третий сигналы фотоэлементов, сигналы событий и сигналы перемещения. Дополнительно, известным образом, и поэтому не изображено, у компьютера 22 есть своя временная база, где на основании сигнала перемещения сохраняются моменты, в которые кодирующее устройство 24b перемещения формирует импульсы. Тем самым, для любого рассматриваемого интервала времени, компьютер 22 способен определять число импульсов, сформированных кодирующим устройством 24b перемещения во время рассматриваемого интервала времени, и также расстояние перемещения, пройденное первой транспортерной лентой 2 за такой рассматриваемый интервал времени. Дополнительно необходимо отметить, что устройство 20 считывания может также иметь соответствующую временную базу, которая может быть синхронизирована с временной базой компьютера 22.
На основании сигнала события, компьютер 22 формирует и хранит (этап 52) соответствующие записи 301, причем каждая запись 301 является записью структуры 300 данных события и содержит код ID, момент tr обнаружения и параметр RSSI соответствующего события. Пример участка структуры 300 данных события изображен на Фиг.8а; две записи 301, обе относящиеся к одному и тому же коду ID1, изображены для примера. В практических целях, компьютер 22 имеет по меньшей мере одно устройство памяти (не изображено), на котором может храниться структура 300 данных события.
Для каждого предмета багажа х, поставленного второй транспортерной лентой 38 на первую транспортерную ленту 2, компьютер 22 определяет (этап 54) соответствующие моменты ti(х) и tib(х) на основании первого сигнала фотоэлемента. Компьютер дополнительно определяет (этап 56) длину l(x) багажа х на основании моментов ti(х) и tib(х) и сигнала перемещения.
Компьютер 22 затем определяет (этап 58) соответствующий момент tIN(х) ввода для каждого предмета багажа х, обнаруженного первым фотоэлементов 24а. Более конкретно, момент tIN(х) ввода является моментом, когда точка предмета багажа х, которая расположена дополнительно позади по направлению М перемещения багажа, входит в ограничительную структуру 4. Момент tIN(х) ввода определяется известным образом, в соответствии с моментом ti(х), сигналом перемещения и расстоянием dp1.
Например, если расстояние dp1 равно нулю, а именно, если первый фотоэлемент 24а расположен на стенке 8 ввода, то момент tIN(х) ввода предмета багажа х совпадает с моментом ti(х). Наоборот, если расстояние dp1 больше нуля, то момент tIN(х) ввода получается путем добавления к моменту ti(х) времени, необходимого для того, чтобы кодирующее устройство 24b перемещения сформировало число импульсов, указывающих, что первая транспортерная лента 2 преодолела расстояние dp1, вслед за моментом ti(х).
Компьютер 22 затем формирует и хранит (этап 60), для каждого предмета багажа х, соответствующий дескриптор, пример которого изображен на фиг.8b, данный пример обозначен числом 400. На практике, для каждого предмета багажа х, соответствующий дескриптор является соответствующей структурой данных объекта, в которую компьютер 22 вставляет (этап 62) момент tIN(х) ввода и длину l(x) багажа х. В практических целях, каждый дескриптор может храниться на устройстве памяти компьютера 22.
Для каждого предмета багажа х компьютер 22 затем определяет (этап 64) соответствующий момент to(х) на основании второго сигнала фотоэлемента.
Компьютер 22, таким образом, определяет момент tOUT(х) вывода (этап 66) для каждого предмета багажа х. Более конкретно, момент tOUT(х) вывода является моментом, когда точка предмета багажа х, которая дополнительно находится впереди по направлению М перемещения багажа, выходит из ограничительной структуры 4.
Момент tOUT(х) вывода определяется известным образом, в соответствии с моментом to(х) сигнала перемещения и расстоянием dp2. Более конкретно, не ограничивая общий смысл, предположим, что расстояние dp2 равно нулю, а именно, что второй фотоэлемент 26 расположен на стенке 10 вывода, и момент tOUT(х) вывода багажа х совпадает с моментом to(х). Если расстояние dp2 не равно нулю, то момент tOUT(х) вывода может быть, однако, определен в соответствии с моментом to(х) и кодирующим устройством 24b перемещения.
Для каждого предмета багажа х момент tOUT(х) вывода хранится (этап 68) в соответствующем дескрипторе. В этом отношении, необходимо отметить, предполагая, что порядок багажа на первой транспортерной ленте 2 не меняется, когда он проходит ограничительную структуру 4, что момент tOUT(х) вывода хранится в дескрипторе, имеющим самый старый момент tIN(х) ввода среди тех, у которых еще нет соответствующих моментов tOUT(х) вывода. Тем самым, если первый момент tIN(х1) ввода предмета багажа х1, второй момент tIN(х2) ввода предмета багажа х2 и затем момент tOUT(х1) вывода первого предмета багажа х1 происходят последовательно, то такой момент tOUT(х1) вывода первого предмета багажа правильно связан с первым моментом tIN(х1) ввода, таким образом, в соответствии с методом FIFO («первым вошел - первым вышел»).
Для каждого предмета багажа х компьютер 22 определяет (этап 70) соответствующий момент td(x) на основании сигнала третьего фотоэлемента.
Компьютер 22 затем определяет и хранит момент tID(x) решения для каждого предмета багажа х (этап 72). Более конкретно, момент tID(x) решения является моментом, когда точка предмета багажа х, которая расположена дополнительно впереди по направлению М перемещения багажа, обнаружена третьим фотоэлементом 28. Такой момент tID(х) решения совпадает с моментом td(х) и хранится вместе с соответствующими моментами tIN(х), tOUT(х) ввода и вывода в дескрипторе предмета багажа х, как изображено путем примера на Фиг.8b. Более конкретно, момент tID(х) решения хранится в том дескрипторе, у которого момент tOUT(х) вывода самый старый среди дескрипторов, у которых нет моментов tID(х) решения, то есть опять в соответствии с методом FIFO.
Компьютер 22 затем определяет (этап 74) момента tOUT *(х) и момент tID *(х). Более конкретно, момент tOUT *(х) равен времени, в котором, вслед за моментом tib(х), кодирующее устройство перемещения формирует число импульсов, указывающих, что первая транспортерная лента 2 переместилась по отношению к моменту tib(х) на длину, равную сумме расстояния dp1 и длине ограничительной структуры 4. Напротив, момент tID *(х) равен моменту времени, в котором, вслед за моментом tib(х), кодирующее устройство перемещения формирует число импульсов, указывающих, что первая транспортерная лента 2 переместилась по отношению к моменту tib(х) на расстояние, равное сумме расстояния dp1, длине ограничительной структуры 4 и расстоянию dp3.
Компьютер 22 затем сравнивает (этап 76) момент tOUT *(х) с моментом tOUT(х). Если моменты tOUT *(х) и tOUT(х) одинаковы, в независимости от погрешностей, вызванных дискретной по своей природе работой кодирующего устройства 24b перемещения, то делается вывод, что рассматриваемый предмет багажа х полностью переместился вместе с транспортерной лентой 2, иначе делается вывод, что багаж х сдвинулся по отношению к первой транспортерной ленте 2. Эта информация может быть предоставлена возможному контролеру устройства 1. Дополнительно, компьютер 22 может сравнивать (этап 78) момент tID *(х) с моментом tID(х), чтобы получить дополнительную информацию, относящуюся к возможному сдвигу багажа х.
Компьютер 22 затем выполняет операции, изображенные на Фиг.9 и описанные ниже, для каждого предмета багажа х.
Более подробно, для каждого предмета багажа х, вслед за моментом tID(х) решения, компьютер 22 определяет и хранит (этап 80) соответствующий список записей, состоящий из каждой записи 301, которая присутствует в структуре 300 данных событий и у которой:
i) момент tr решения < tID(х);
ii) параметр RSSI выше, чем минимальное пороговое значение RSSImin; и
iii) тот же код ID, что и по меньшей мере у N других записей 301 структуры 300 данных событий.
Более подробно, требование i) удовлетворено автоматически, если операции этапа 80 выполняются точно в момент tID(х) решения. Напротив, по отношению к требованиям ii) и iii), они используются во избежание обработки записей, связанных с ложными событиями, такими как, например, случайный проход метки, связанной с человеком, который проходит рядом с ограничительной структурой 4. N может быть выбрано произвольно; например, N может быть от одного до десяти.
Записи 301, которые не соблюдают требования i-iii), могут быть удалены из структуры 300 данных событий (этап не изображен).
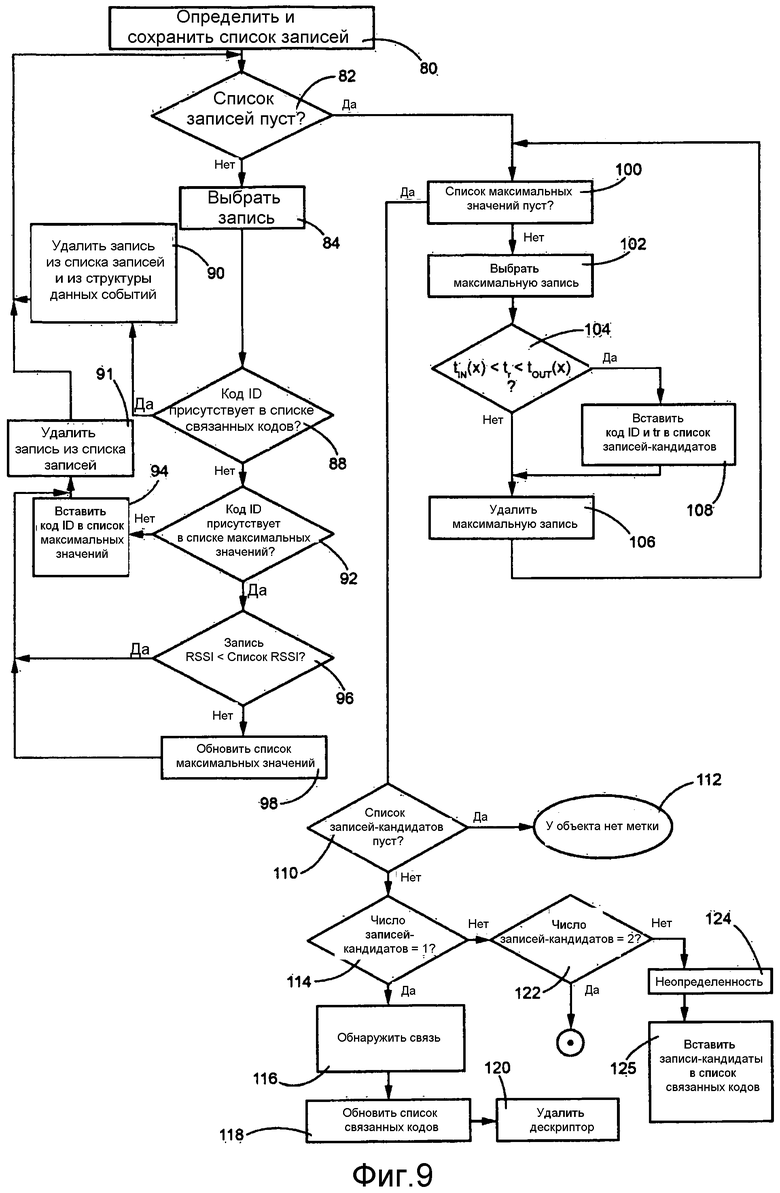
Компьютер 22 затем проверяет (этап 82), является ли вышеупомянутый список пустым.
Если список записей не пуст (НЕТ на этапе 82), то компьютер 22 выбирает (этап 84) запись из списка записей и затем проверяет (этап 88), присутствует ли код ID выбранной записи в списке связанных кодов, описанных ниже.
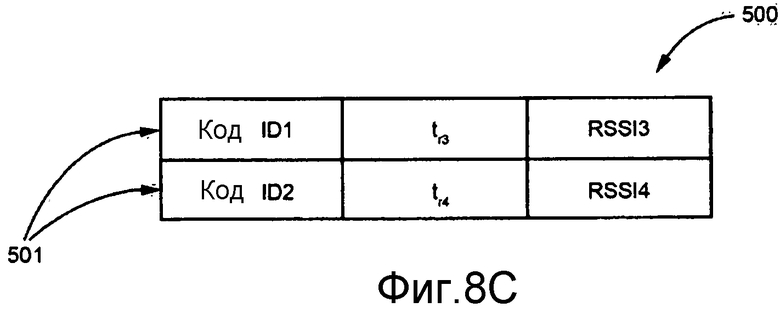
Если код ID выбранной записи присутствует в списке связанных кодов (ДА на этапе 88), то компьютер 22 удаляет (этап 90) выбранную запись из списка записей и из структуры 300 данных событий, а затем повторяет операции этапа 82. Иначе, если код ID выбранной записи не присутствует в списке связанных кодов (НЕТ на этапе 88), то компьютер 22 проверяет (этап 92), присутствует ли код ID выбранной записи в списке 500 максимальных значений (Фиг.8с). Такой список 500 максимальных значений является структурой данных, состоящей из списка максимальных записей, каждая из которых идентифицируется числом 501 на Фиг.8с и содержит соответствующий код ID, соответствующий момент tr обнаружения и соответствующий параметр RSSI.
Если код ID выбранной записи не присутствует в списке 500 максимальных значений (НЕТ на этапе 92), то компьютер 22 вставляет (этап 94) код ID выбранной записи в соответствующую максимальную запись вместе с параметром RSSI выбранной записи и в момент tr обнаружения выбранной записи; компьютер 22 затем удаляет (этап 91) выбранную запись из списка записей, а затем повторяет операции этапа 82.
Иначе, если код ID выбранной записи уже присутствует в списке 500 максимальных значений (ДА на этапе 92), то компьютер 22 сравнивает (этап 96) параметр RSSI выбранной записи с параметром RSSI, присутствующим в списке 500 максимальных значений и связывает код ID выбранной записи, то есть присутствующей в той же максимальной записи, к которой принадлежит код ID выбранной записи.
Если параметр RSSI выбранной записи меньше, чем параметр RSSI, присутствующий в списке 500 максимальных значений, и связан с кодом ID выбранной записи (ДА на этапе 96), то компьютер 22 повторяет операции этапов 91 и 82. Иначе, если параметр RSSI выбранной записи больше, чем параметр RSSI, присутствующий в списке 500 максимальных значений, и связан с кодом ID выбранной записи (НЕТ на этапе 96), то компьютер 22 обновляет список 500 максимальных значений (этап 98) и, более конкретно, максимальную запись, в которой присутствует код ID выбранной записи, путем вставки параметра RSSI выбранной записи и момента tr обнаружения выбранной записи в такую запись; затем компьютер 22 повторяет операции этапов 91 и 82.
На практике, операции этапов 82-98 позволяют определять соответствующую максимальную запись для каждого кода ID, присутствующего в списке записей. Тем самым, хотя максимальные записи списка 500 максимальных значений схожи с записями структуры 300 данных событий, в отличие от структуры 300 данных событий, список 500 максимальных значений не может содержать более, чем две максимальных записи с тем же кодом ID.
Когда список записей пуст (ДА на этапе 82), компьютер 22 проверяет (этап 100), пуст ли список 500 максимальных значений.
Если список 500 максимальных значений не пуст (НЕТ на этапе 100), то компьютер 22 выбирает (этап 102) максимальную запись.
Компьютер 22 затем проверяет (этап 104), находится ли момент tr обнаружения выбранной максимальной записи между моментом tIN(X) ввода и моментом tOUT(x) вывода предмета багажа х, хранящимися в дескрипторе багажа х.
Если момент tr обнаружения выбранной максимальной записи не находится между моментом tIN(X) ввода и момент tOUT(x) вывода предмета багажа х (ДА на этапе 104), то компьютер 22 удаляет выбранную максимальную запись (этап 106) и затем повторяет операции этапа 100. Напротив, если момент tr обнаружения выбранной максимальной записи находится между моментом tIN(X) ввода и моментом tOUT(x) вывода предмета багажа х (ДА на этапе 104), то компьютер 22 вставляет (этап 108) код ID и момент tr обнаружения выбранной максимальной записи значений в соответствующую запись-кандидат списка 600 записей-кандидатов (Фиг.8d) и затем повторяет операции этапа 106. Пример списка 600 записей-кандидатов изображен на Фиг.8d; в данном примере список 600 записей-кандидатов состоит из единственной записи-кандидата, указанной 601.
Опять со ссылкой на операции этапа 100, если список 500 максимальных значений пуст (ДА на этапе 100), то компьютер 22 проверяет (этап 110), является ли список 600 записей-кандидатов пустым.
Если список 600 записей-кандидатов пуст (ДА на этапе 110), то у предмета багажа х нет метки, значит, компьютер 22 может формировать сигнал об отсутствии метки (этап 112). Напротив, если список 600 записей-кандидатов не пуст (НЕТ на этапе 110), то компьютер 22 проверяет (этап 114), является ли число кодов ID, содержащихся в списке 600 записей-кандидатов, равным одному.
Если число кодов ID, содержащихся в списке 600 записей-кандидатов, равно одному (ДА на этапе 114), это значит, что метка, код ID которой присутствует в списке 600 записей-кандидатов, физически связана с предметом багажа х, таким образом, компьютер 22 формирует (этап 116) сигнал, относящийся к такой связи. Компьютер 22 затем обновляет (этап 118) список связанных кодов путем вставки кода ID, присутствующего в списке 600 записей-кандидатов; дополнительно, компьютер 22 удаляет (этап 120) дескриптор, относящийся к багажу х, из устройства памяти.
Иначе, если число кодов ID, содержащихся в списке 600 записей-кандидатов, больше, чем один (НЕТ на этапе 114), компьютер 22 проверяет (этап 122), является ли число кодов ID, содержащихся в списке 600 записей-кандидатов, равным двум.
Если число кодов ID, содержащихся в списке 600 записей-кандидатов, отлично от двух (НЕТ на этапе 122), это значит, что либо несколько меток связаны с предметом багажа х, либо несколько предметов багажа расположены бок о бок в поперечном направлении по отношению к направлению М перемещения багажа, и, таким образом, они не обнаружены первым фотоэлементом 24а как отдельные. Следовательно, компьютер 22 формирует (этап 124) сигнал о неопределенности, чтобы просигнализировать о необходимости дополнительно проверить багаж х, например, с помощью инспекции оператора; дополнительно, компьютер 22 вставляет (этап 125) коды ID, содержащиеся в списке 600 записей-кандидатов, в список связанных кодов.
Наоборот, если число кодов ID, содержащихся в списке 600 записей-кандидатов, равно двум (ДА на этапе 122), то компьютер 22 выполняет операции, изображенные на Фиг.10.
Более конкретно, на основании сигнала первого фотоэлемента и, возможно, сигнала перемещения (если расстояние dp1 больше нуля), компьютер 22 проверяет (этап 130), относится ли момент tIN(x+1) ввода к предмету багажа х+1, расположенному перед предметом багажа х по направлению М перемещения багажа, и находится ли такой момент tIN(x+1) ввода между моментами tIN(x) ввода и tID(х) решения предмета багажа х.
Если момент tIN(x+1) не существует, то есть если соответствующий дескриптор отсутствует или если соотношение tIN(x)<tIN(x+1)<tID(x) не применимо (НЕТ на этапе 130), то компьютер 22 выполняет операции этапов 124 и 125 и, таким образом, формирует сигнал о неопределенности, и обновляет список связанных кодов, потому что число кодов ID, содержащихся в списке 600 записей-кандидатов, равно двум, но ни один из предметов багажа х+1 не находится достаточно близко к предмету багажа х, чтобы подтвердить присутствие двух кодов ID в списке 600 записей-кандидатов.
Наоборот, если момент tIN(x+1) существует и соотношение tIN(x)<tIN(x+1)<tID(x) применимо (ДА на этапе 130), то компьютер 22 определяет (этап 132) расстояние z(x) интервала между точкой предмета багажа х, которая дополнительно находится впереди по направлению М перемещения, и точкой предмета багажа х+1, которая дополнительно находится позади по направлению М перемещения багажа. Расстояние z(x) интервала может быть определено в соответствии с сигналом первого фотоэлемента и сигналом перемещения, например, путем подсчитывания числа импульсов, сформированных кодирующим устройством 24b положения между моментом tib(x), когда первый фотоэлемент 24а завершает обнаружение предмета багажа х, и моментом ti(x+1), когда первый фотоэлемент 24а начинает обнаружение второго предмета багажа х+1. Расстояние z(x) интервала получается путем умножения числа импульсов, подсчитанных простым перемещением.
Компьютер 22 затем проверяет (этап 134), превышает ли расстояние z(x) интервала первое пороговое значение zth1 расстояния, например, 30 см.
Если расстояние z(x) интервала не превышает первое пороговое значение zth1 расстояния (НЕТ на этапе 134), то компьютер 22 выполняет операции этапов 124-125 и, таким образом, формирует сигнал о неопределенности, и обновляет список связанных кодов. В таком случае, предмет багажа х и предмет багажа х+1 находятся так близко, что правильное обнаружение физических связей между метками и багажом х и х+1 не может быть произведено.
Напротив, если расстояние z(x) интервала превышает первое пороговое значение zth1 расстояния (ДА на этапе 134), то компьютер 22 определяет (этап 136) расстояние k(x). Расстояние k(x) получается путем подсчитывания числа импульсов, сформированных кодирующим устройством 24b перемещения между моментами tr обнаружения, связанными с двумя кодами ID, содержащимися в списке 600 записей-кандидатов, и умножения числа подсчитанных импульсов для простого перемещения.
Компьютер 22 затем проверяет (этап 138), превышает ли расстояние k(x) интервала второе пороговое значение kth2 расстояния, например, 30 см.
Если расстояние k(x) интервала не превышает второе пороговое значение kth2 расстояния (НЕТ на этапе 138), то компьютер 22 выполняет операции этапов 124-125, а затем формирует сигнал о неопределенности и обновляет список связанных кодов. В таком случае, два кода ID, присутствующих в списке 600 записей-кандидатов, связаны с моментами tr, которые так близко друг к другу, что они предотвращают правильное обнаружение физической связи между метками и багажом х и х+1.
Напротив, если расстояние k(x) интервала превышает второе пороговое значение kth2 расстояния (ДА на этапе 134), это значит, что предмет багажа х физически связан с меткой, код ID которой находится в записи-кандидате, которая содержит самый старый момент tr обнаружения из двух моментов tr обнаружения, присутствующих в списке 600 записей-кандидатов, в дальнейшем в данном документе называемом «связанный код» для понятности. Тем самым компьютер 22 формирует (этап 140) сигнал, относящийся к физической связи между предметом багажа х и вышеупомянутой меткой. Компьютер 22 затем обновляет (этап 142) список связанных кодов путем вставки только связанного кода; дополнительно, компьютер 22 удаляет (этап 144) дескриптор, относящийся к багажу х, из устройства памяти.
На практике, предположим для упрощения, что N=1 и RSSImin=0, таким образом, требования ii) и iii) всегда удовлетворяются, а операции, описанные и изображенные на Фиг.7, 9 и 10, обеспечивают определение списка записей для каждого предмета багажа х и сравнение моментов tr обнаружения записей структуры 300 данных событий с первым временным окном Tw1(x), заключенным между:
- моментом tr обнаружения самой старой записи, которая присутствует в структуре 300 данных событий, когда происходит выполнение операций этапа 80, то есть когда определен список записей; и
- моментом tID(x) решения предмета багажа х.
Далее, операции, описанные и изображенные на Фиг.7, 9 и 10, обеспечивают формирование списка 500 максимальных значений, на основании списка записей, и, таким образом, определение списка 600 записей-кандидатов. Более конкретно, список 600 записей-кандидатов определяется в соответствии со списком 500 максимальных значений и вторым временным окном Tw2(x). На практике, чтобы определить список 600 записей-кандидатов, моменты tr обнаружения максимальных записей сравниваются со вторым временным окном Tw2(x), которое заключено между моментом tIN(x) ввода и моментом tOUT(x) вывода предмета багажа х; таким образом, оно имеет временные рамки, отличные по сравнению с первым временным окном Tx1(x). Следующие операции затем зависят от числа записей-кандидатов, присутствующих в списке 600 записей-кандидатов.
В качестве примера, Фиг.11-15 изображают возможные рабочие сценарии, в которых может быть применен настоящий способ. Более конкретно, эти рабочие сценарии изображены с графической точки зрения, причем отметьте, что каждая запись принадлежит к любому списку записей и, таким образом, каждая максимальная запись может быть показан как точка на плоскости координат, у которой время - это ось абсцисс, а параметр RSSI - ось ординат; тем самым, такая точка имеет момент tr обнаружения записи/максимальной записи в качестве абсциссы, а параметр RSSI записи/максимальной записи в качестве ординаты. Дополнительно, чтобы изобразить информацию, связанную с кодом ID записи/максимальной записи, использованы различные графические символы для точек, представляющих записи/максимальные записи с различными кодами ID. Что касается записей-кандидатов, наоборот, они могут быть изображены как совпадающие с соответствующими максимальными записями, хотя записи-кандидаты не имеют сами по себе информации, относящейся к параметру RSSI.
В дальнейшем в настоящем документе, для упрощения будет сделана ссылка на записи и/или максимальные записи внутри временных окон, для указания записей и/или максимальных записей, моменты tr обнаружения которых находятся внутри этих окон. Дополнительно, будет сделана ссылка на записи, относящиеся к определенной метке, чтобы указать записи с кодом ID определенной метки.
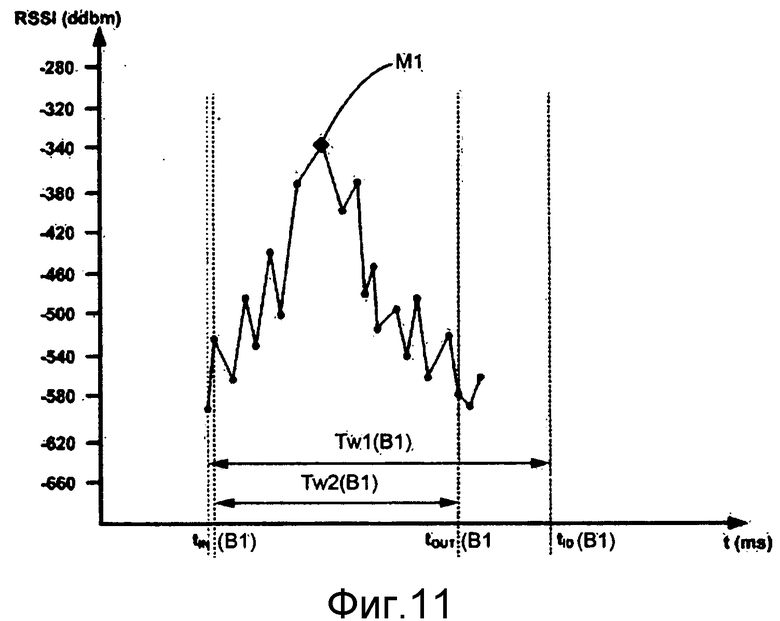
Более конкретно, Фиг.11 изображает рабочий сценарий, в котором первая метка I1 связана с первым предметом В1 багажа, причем дополнительные метки не обнаруживаются во время первого временного окна Tw1(B1) предмета В1 багажа, то есть нет записей с кодом ID, отличным от кода ID метки I1 внутри первого временного окна Tw1(B1) предмета В1 багажа. Применение настоящего способа обнаружения, таким образом, приводит к определению только одной первой максимальной записи и только одной первой записи-кандидата, тем самым к правильному обнаружению связи между первой меткой I1 и первым предметом В1 багажа. Более конкретно, первая максимальная запись указана точкой М1.
Фиг.12 изображает рабочий сценарий, где первая транспортерная лента В1 физически связана со второй меткой I2 в дополнение к первой метке I1. В таком случае, в отношении предмета В1 багажа применение настоящего способа обнаружения приводит к формированию второй максимальной записи (указанной как М2), который находится внутри временного окна Tw1(B1) предмета В1 багажа и, таким образом, вызывает формирование второй записи-кандидата. Однако отсутствие ввода другого багажа обнаруживается между моментами tIN(x) ввода и tID(x) вывода первого предмета В1 багажа, поэтому формируется сигнал о неопределенности.
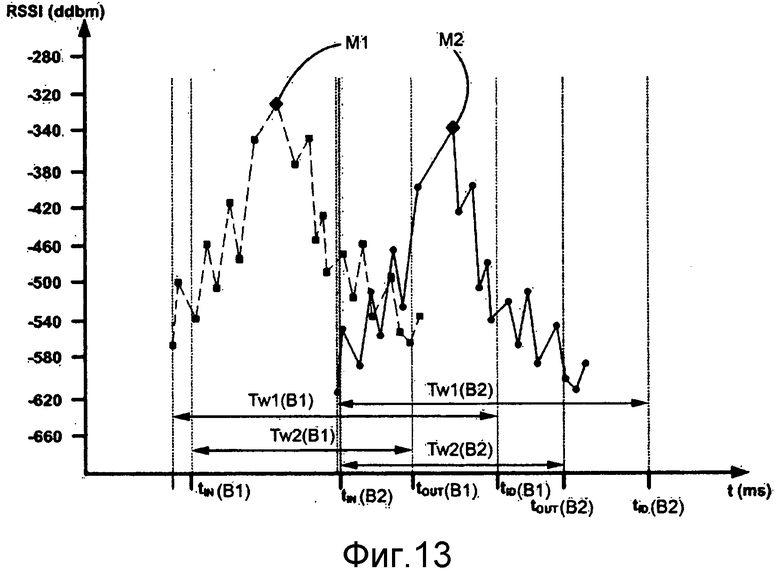
Фиг.13 изображает, напротив, рабочий сценарий, где первая транспортерная лента 2 также перемещает второй предмет В2 багажа, расположенный впереди первого предмета В1 багажа и связанный со второй меткой I2. В таком случае, в отношении первого предмета В1 багажа, применение настоящего способа обнаружения приводит к формированию второй максимальной записи (опять же указанной как М2), который, однако, находится за пределами первого временного окна Tw1(B1) предмета В1 багажа и поэтому не вызывает формирование второй записи-кандидата. Тем самым, предположим, что компьютер 22 является идеальным и выполняет любую операцию за нулевое время, тогда связь между первой меткой I1 и первым предметом В1 багажа правильно обнаружена в момент tID(В1) первого предмета В1 багажа. Более того, в момент tID(В2) решения второго предмета В2 багажа, связь между второй меткой I2 и вторым предметом В2 багажа будет правильно обнаружена. Другими словами, и опять со ссылкой на первый предмет В1 багажа, хотя и есть записи, относящиеся ко второй метке I2 внутри первого временного окна Tw1(B1) первого предмета В1 багажа, эти записи не предотвращают правильное обнаружение связи между первой меткой I1 и первым предметом В1 багажа. На самом деле, вторая максимальная запись М2, которая происходит из этих записей, находится за пределами второго временного окна Tw2(B1) первого предмета В1 багажа.
Фиг.14 изображает, напротив, рабочий сценарий, в котором у первого предмета В1 багажа нет первой метки I1. Дополнительно, есть записи, относящиеся ко второй метке I2 внутри первого временного окна Tw1(B1) первого предмета В1 багажа. Тем не менее, вторая метка I2 не связана с первым предметом В1 багажа. На самом деле, записи, относящиеся ко второй метке I2 вызывают формирование только второй максимальной записи М2, которая находится за пределами второго временного окна Tw2(B1) первого предмета В1 багажа.
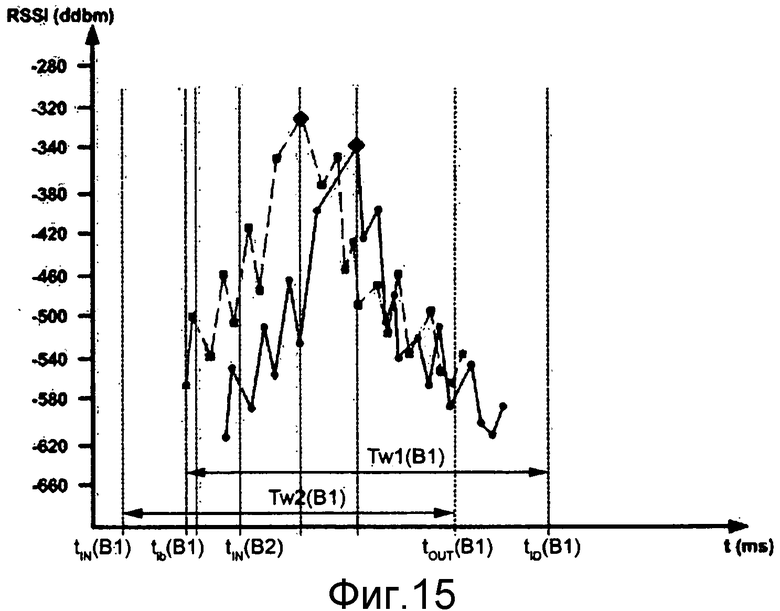
Фиг.15 изображает, напротив, рабочий сценарий, похожий на рабочий сценарий, изображенный на Фиг.14. Однако, в отличие от изображенного на Фиг.13, при таком рабочем сценарии формируются как первая, так и вторая записи-кандидаты первого предмета В1 багажа, потому что обе, первая и вторая, записи М1, М2 максимального значения находятся внутри первого временного окна Tw1(B1) первого предмета В1 багажа. Дополнительно, момент tIN(B2) ввода второго предмета В2 багажа находится между моментами tIN(х) ввода и tID(х) решения первого предмета В1 багажа. Более того, предполагается, что расстояние z(B1) интервала между точкой В1 багажа, которая дополнительно находится впереди по направлению М перемещения багажа, и точкой предмета В2 багажа, которая дополнительно находится позади по направлению М перемещения багажа, больше, чем первое пороговое значение zth1 расстояния. Вновь предполагается, что расстояние k(B1), относящееся к расстоянию перемещения, пройденному между моментами tr обнаружения первой и второй записей-кандидатов, больше, чем второе пороговое значение kth2 расстояния. На основании этих предпосылок, применение настоящего способа позволяет правильно обнаруживать связь между таким первым предметом В1 багажа и первой меткой I1 в момент tID(В1) решения первого предмета В1 багажа. Подобным образом, связь между вторым предметом В2 багажа и второй меткой I2 устанавливается в момент tID(В2) решения второго предмета В2 багажа.
Фиг.16 изображает операции согласно различным вариантам выполнения настоящего способа. Перед описанием этих операций стоит отметить, что в соответствии с вариантом выполнения компьютер 22 взаимодействует с устройством 20 считывания, когда формирует и хранит (этап 52) записи структуры 300 данных событий, так что каждая запись 301 также содержит индикатор A(i) антенны, в дополнение к коду ID, момент tr обнаружения и параметр RSSI соответствующего события. Более конкретно, индикатор A(i) антенны указывает антенну 16, через которую устройство 20 считывания принимает ответ, формированный соответствующим событием. На практике, операции этапа 52 приводят к формированию структуры 300 данных события, подобной той, что изображена для примера на Фиг.17а.
Опять со ссылкой на Фиг.16, список записей (этап 80) определяется как описано выше, путем проверки соответствия требованиям i), ii) и iii).
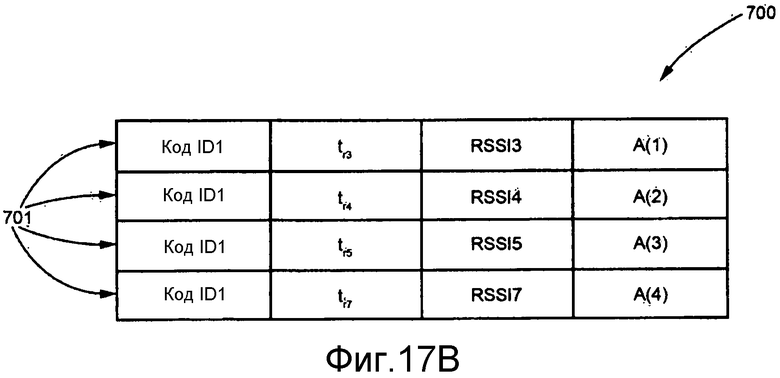
Для каждого кода ID, присутствующего в списке записей, затем определяется соответствующая структура 700 данных антенн (этап 150), состоящая из числа соответствующих записей антенн, равного числу антенн 16. Пример возможной структуры 700 данных антенн изображен на Фиг.17b, где записи антенн указаны числом 701. В таком случае, пример, изображенный на Фиг.17b, относится к коду ID1 и структуре 300 данных событий, изображенной для примера на Фиг.17а; дополнительно, пример, изображенный на Фиг.17b, получен путем предположения о том, что список записей совпадает со структурой 300 данных событий, изображенной на Фиг.17а, например, потому что tri<tID(x), N=1 и RssIi<RSSImin, где i=1,…7.
Более конкретно, при рассмотрении кода ID среди кодов ID, присутствующих в списке записей, каждая запись антенны соответствующей структуры 700 данных антенны содержит рассматриваемый код ID, идентификатор A(i) антенны, к которому относится сама антенна, а также момент tr обнаружения и параметр RSSI записи, имеющий параметр RSSI максимального значения среди записей списка записей, относящегося к рассматриваемому коду ID и к такому идентификатору A(i) антенны. Другими словами, запись, которая имеет параметр RSSI максимального значения, извлекается из списка записей для каждого кода ID и для каждой антенны 16. Например, со ссылкой на Фиг.17а и 17b, структура 700 данных антенны, изображенная на Фиг.17b, получается, если RSSI3>RSSI1,RSSI5>RSSI6.
Для каждого кода ID, присутствующего в списке записей, и, таким образом, для каждой структуры 700 данных антенны, затем определяется взвешенный момент (этап 152) в соответствии с моментами tr обнаружения структуры 700 данных антенны.
Более подробно, принимая во внимание код ID, взвешенный момент получается как среднее взвешенное моментов tr обнаружения соответствующих структур 700 данных антенны. Более конкретно, соответствующий вес может быть отнесен к каждой антенне 16 устройства 20 считывания, чтобы получить среднее взвешенное. Например, вес каждой антенны 16 может быть прямо пропорционален параметру RSSI, присутствующему в соответствующей записи антенны в структуру 700 данных антенны, относящуюся к данному коду ID.
Затем формируется список 500 максимальных значений (этап 154), состоящий из числа максимальных записей, равного числу структур 700 данных антенны. Более конкретно, каждая максимальная запись содержит код ID соответствующей структуры 700 данных антенны. Дополнительно, в каждой максимальной записи, соответствующий момент tr обнаружения устанавливается равным соответствующему взвешенному моменту, в то время как параметр RSSI устанавливается равным параметру RSSI максимального значения среди параметров RSSI, присутствующих в соответствующей структуре 700 данных антенны.
Как только операции этапа 154 выполнены, способ обнаружения выполняет операции 100-144, описанные ранее в отношении Фиг.9 и 10.
На практике, операции, изображенные на Фиг.16, позволяют опосредовать информацию, полученную от антенн 16, например, путем большего взвешивания информации, полученной от антенн 16, у которых обнаруженные события имеют большую интенсивность и которые, возможно, находятся в лучших условиях для обнаружения присутствия меток. Кроме того, определение взвешенных моментов позволяет иметь информацию, которая меньше подвержена положениями единственных антенн 16 по отношению к меткам.
В соответствии с дополнительным вариантом выполнения, там, где на Фиг.9, 10 и 16 показаны моменты tOUT(x) и tID(x), можно применять, соответственно, моменты tOUT *(x) и tID *(x), которые могут храниться в дескрипторах соответствующего багажа х, как описано по отношению к моментам tOUT(x) и tID(x).
Более подробно, операции определения списка записей этапа 80 могут быть выполнены вслед за моментом tID *(x) решения и, дополнительно, требование i) может быть сформулировано как tr< tID *(x). Подобным образом, по отношению к операциям этапа 104, может быть проверено, находится ли момент tr обнаружения выбранной максимальной записи между моментом tIN(x) и моментом tOUT *(x) предмета багажа х. Опять, по отношению к операциям этапа 130, может быть проверено, находится ли возможный момент tIN(x+1) ввода, относящийся к предмету багажа х+1, между моментами tIN(x) ввода и tID *(x) решения предмета багажа х.
На практике, использование моментов tOUT *(x) и tID * (x) делает определение моментов tOUT(x) и tID(x) опциональным и, таким образом, делает опциональным присутствие второго и третьего фотоэлементов 26, 28. Более того, если два предмета багажа наложены друг на друга на первом фотоэлементе 24а (и, таким образом, создан только один дескриптор), но при этом они уже наложены на третьем фотоэлементе 28 (например, из-за того, что верхний предмет багажа упал), то определяется единственный момент tID(x) решения, таким образом, избегается определение второго момента tID(x+1) решения, у которого не будет соответствующего дескриптора. Тем самым исключается возможность формирования неправильных сигналов и предотвращается ситуация, при которой второй момент tID(x+1) решения присутствует, но при которой дескриптор для его вставки отсутствует.
Преимущества, обеспеченные настоящим способом обнаружения, очевидны из вышеизложенного. Более конкретно, настоящий способ обнаружения позволяет обнаруживать связь между метками и объектами, даже если расстояние между этими объектами мало, порядка 30-40 см. Возможные ситуации неопределенности сигнализируются, чтобы позволить операторам вмешаться.
Что касается устройства 1, наоборот, оно позволяет увеличить чувствительность к меткам, присутствующим в определенном участке пространства, в данном случае полости 6 ограничительной структуры 4, чтобы избежать неправильных обнаружений меток, которые случайно проходят рядом с устройством 1. Дополнительно, устройство 1 может быть легко интегрировано в структуры перемещения багажа известного типа. Подобным образом, устройство 1 может быть использовано вместе с системой считывания штрихкодов известного типа, способной обнаруживать возможные штрихкоды, размещенные на багаже. Тем самым, компьютер 22 может сравнивать и/или интегрировать обнаружения физической связи, полученные путем применения описанного способа обнаружения, с результатами, обеспеченными системой считывания штрихкодов.
Наконец, очевидно, что могут быть сделаны изменения и варианты описанного способа обнаружения и устройства, не выходя за пределы объема настоящего изобретения.
Например, устройство 20 считывания может функционировать в прерывном режиме и при этом быть включено в момент tIN(x) ввода каждого предмета багажа х и выключено в соответствующий момент tID(x) решения.
Более того, для каждого предмета багажа х этап определения списка записей (этап 80) может быть отложен до следующего момента по отношению к соответствующему моменту tID(x) решения (или к моменту tID *(x)), при этом список записей может состоять из записей, имеющих моменты tr<tID(x)+Δ обнаружения (или момент tID *(x)+Δ), где Δ - это первая погрешность, которая может быть установлена по желанию. Подобным образом, во время операций определения записей-кандидатов и более конкретно во время операций этапа 104, вместо проверки того, находится ли момент tr обнаружения выбранной максимальной записи между моментом tIN(x) ввода и моментом tOUT(x) вывода предмета багажа х (или между моментом tIN(x) ввода и моментом tOUT *(x) вывода), может быть выполнена проверка того, находится ли момент tr обнаружения выбранной максимальной записи между моментом tIN(x)+Δ' и моментом tOUT(x)+Δ'' (или между моментом tIN(x)+Δ' и моментом tOUT *(x)+Δ'' вывода), где Δ' и Δ'' - это вторая и третья погрешности, которые могут быть установлены по желанию. Необходимо дополнительно отметить, что Δ, Δ' и Δ'' могут быть отрицательными.
По отношению к операциям, изображенным на Фиг.7, 9, 10 и 16, порядок выполнения операций может быть отличным от того, что изображен и описан; подобным образом, могут быть использованы другие структуры данных. Наконец, некоторые операции, изображенные на Фиг.7, 9, 10 и 16, выполняются не компьютером 22, а, например, считывающим элементом 18 устройства 20 считывания. Опять, здесь может быть включена периодическая операция перемещения от структуры 300 данных события, причем записи 301 остаются в той же структуре 300 данных события более длительное время, чем пороговое значение времени.
Что касается устройства 1, наоборот, антенны 16 могут быть расположены отлично от того, что изображено. Например, они могут быть обеспечены экраном, и в таком случае они могут быть расположены в прямом контакте с ограничительной структурой 4.
Другой тип устройства измерения может быть использован вместо первого, второго и третьего фотоэлементов 24а, 26, 28; эти фотоэлементы могут быть дополнительно связаны со считывающим элементом 18 вместо компьютера 22. Подобным образом, любое устройство, которое позволяет определять расстояния перемещения, пройденные первой транспортерной лентой 2, может быть использовано вместо кодирующего устройства 24b перемещения.
Наконец, геометрическая форма ограничительной структуры может быть отличной от показанной. Например, стенки 8, 10 ввода и вывода могут иметь прямоугольную форму вместо квадратной.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ПАССИВНОГО ДОСТУПА | 2015 |
|
RU2671925C2 |
| Система и способ обнаружения вредоносного кода в файле | 2016 |
|
RU2637997C1 |
| СПОСОБ СЕТЕВОГО УПРАВЛЕНИЯ ПУТЕМ ПОДДЕРЖКИ СО СТОРОНЫ ТЕРМИНАЛА С ИСПОЛЬЗОВАНИЕМ СИГНАЛИЗАЦИИ В ПЛОСКОСТИ УПРАВЛЕНИЯ МЕЖДУ ТЕРМИНАЛОМ И СЕТЬЮ | 2009 |
|
RU2488982C2 |
| СИСТЕМА ИНВЕНТАРИЗАЦИИ СОДЕРЖИМОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2663255C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ОТСЛЕЖИВАНИЯ СОДЕРЖИМОГО ИНВЕНТАРЯ | 2014 |
|
RU2686275C2 |
| ИНТЕРФЕЙС ПОСТАВЩИКОВ СЛУЖБ УСТРОЙСТВ | 2005 |
|
RU2421811C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ИНФОРМАЦИИ, МОБИЛЬНЫЙ ТЕРМИНАЛ И УСТРОЙСТВО ОТОБРАЖЕНИЯ ДЛЯ ЭТОГО | 2013 |
|
RU2617548C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ НЕРАЗРЕШЕННЫХ ПРЕДМЕТОВ | 2000 |
|
RU2253861C2 |
| АРХИТЕКТУРА, МОДЕЛЬ ПРОГРАММИРОВАНИЯ И API | 2005 |
|
RU2463650C2 |
| УПРАВЛЯЕМЫЕ УСТРОЙСТВАМИ СПИСКИ ТОЧЕК ДОСТУПА В БЕСПРОВОДНОЙ СВЯЗИ | 2009 |
|
RU2497311C2 |










Изобретение относится к средствам обнаружения радиочастотных ярлыков объектов, в частности багажа. Технический результат заключается в повышении точности обнаружения идентифицируемого объекта. В способе обнаруживают электронные идентификаторы в соответствующие моменты (tr) обнаружения и формируют сигналы события с соответствующим набором записей. При этом сигнал события указывает на соответствующую интенсивность обнаружения, и выполняют этап обнаружения на основании анализа полученных записей с учетом соответствующих интенсивностей. 2 н. и 9 з.п. ф-лы, 21 ил.
1. Способ обнаружения физических связей между электронными идентификаторами и объектами, к которым физически прикреплены электронные идентификаторы, причем каждый электронный идентификатор дополнительно связан с соответствующим кодом, при этом способ содержит этапы, на которых:
- перемещают объекты вдоль направления (М) перемещения, так что они проходят через структуру (4) обнаружения;
- определяют для каждого объекта соответствующий первый момент (tIN(x)) времени и соответствующий второй момент (tOUT(x)) времени, соответственно, указывающие на вход объекта в структуру обнаружения и выход объекта из структуры обнаружения;
- определяют для каждого объекта соответствующий более высокий момент (tID(x)) времени, следующий за соответствующим вторым моментом времени;
- выполняют обнаружения электронных идентификаторов, причем каждое обнаружение относится к соответствующему обнаруженному электронному идентификатору и выполняется в соответствующий момент (tr) обнаружения; и
- формируют сигналы событий, указывающие на соответствующие моменты обнаружения соответствующих обнаружений, причем каждый упомянутый сигнал события дополнительно указывает код соответствующего обнаруженного электронного идентификатора;
отличающийся тем, что каждый упомянутый сигнал события дополнительно указывает на соответствующую интенсивность обнаружения, и дополнительно содержащий этапы, на которых:
- формируют на основании сигналов событий соответствующие первые записи (301) первой структуры (300) данных, причем каждая первая запись содержит момент обнаружения, код обнаруженного электронного идентификатора и интенсивность обнаружения, которые указываются соответствующим сигналом события;
- определяют для каждого объекта соответствующий набор записей путем включения в упомянутый набор записей первых записей первой структуры данных, которые имеют моменты обнаружения ниже, чем более высокий момент времени, относящийся к объекту;
- формируют для каждого объекта соответствующее число вторых записей (501) соответствующей второй структуры (500) данных на основе соответствующего набора записей, причем каждая вторая запись содержит соответствующий пиковый момент и соответствующий код, а упомянутый этап формирования соответствующего числа вторых записей содержит этап, на котором вставляют новую вторую запись для каждого кода, рассматриваемого среди кодов, присутствующих в наборе записей, относящихся к объекту, причем вставленная новая вторая запись содержит рассматриваемый код, причем пиковый момент вставленной новой второй записи зависит от момента обнаружения первой записи, которая:
- принадлежит к набору записей, относящихся к объекту; и
- имеет рассматриваемый код; и
- имеет максимальную интенсивность обнаружения среди первых записей набора записей, относящихся к объекту, который содержит рассматриваемый код;
формируют для каждого объекта некоторое число третьих записей (601) соответствующей третьей структуры (600) данных путем вставки новой третьей записи в третью структуру данных, относящуюся к объекту, для каждой второй записи второй структуры данных, относящейся к объекту, у которой пиковый момент находится во временном окне (Tw2(x)), относящемся к объекту, и имеет длительность от соответствующего первого момента времени до соответствующего второго момента времени, причем каждая вставленная третья запись содержит код соответствующей второй записи и предполагаемый момент, равный пиковому моменту соответствующей второй записи;
и при этом для каждого объекта выполняют этап обнаружения физических связей на основании третьих записей третей структуры данных, относящейся к объекту.
2. Способ по п.1, в котором упомянутый этап определения для каждого объекта соответствующего набора записей содержит этап, на котором включают в упомянутый набор записей только первые записи первой структуры данных, которые кроме моментов обнаружения ниже, чем более высокий момент (tID(x)) времени, относящийся к объекту:
- имеют интенсивность обнаружения выше, чем пороговое значение (RSSImin) интенсивности; и
- код которых присутствует в числе первых записей (301) первой структуры (300) данных выше, чем числовое пороговое значение (N).
3. Способ по п.1 или 2, дополнительно содержащий в отношении первого объекта этапы, на которых проверяют (122), равно ли число третьих записей (601), присутствующих в третьей структуре (600) данных, относящейся к первому объекту, двум, и, если число третьих записей, присутствующих в третьей структуре (600) данных, относящейся к первому объекту, равно двум:
- определяют (130) следующий момент (tIN(x+1)) входа, относящийся ко входу второго объекта в структуру (4) обнаружения;
- проверяют (130), находится ли следующий момент входа между первым моментом (tIN(x)) времени и более высоким моментом (tID(x)) времени, относящимся к первому объекту, и, если следующий момент входа находится между первым моментом времени и более высоким моментом времени, относящимся к первому объекту:
- определяют (132) расстояние (z(x)) интервала между первым и вторым объектами;
- проверяют (134), превышает ли расстояние интервала первое пороговое значение расстояния (zth1);
- если расстояние интервала превышает первое пороговое значение расстояния, определяют (136) пиковое расстояние (k(x)) на основании предполагаемых моментов, присутствующих в третьих записях третьей структуры данных, относящейся к первому объекту;
- проверяют (138), превышает ли пиковое расстояние второе пороговое значение (kth2) расстояния и, в случае, если пиковое расстояние превышает второе пороговое значение расстояния, связывают (140) объект с электронным идентификатором, имеющим код, который присутствует в третьей записи, содержащей самый старый предполагаемый момент, иначе формируют (124, 125) сигнал о неопределенности.
4. Способ по п.3, дополнительно содержащий этапы, на которых:
- проверяют (110), равно ли число третьих записей (601), присутствующих в третьей структуре (600) данных, относящейся к первому объекту, нулю;
- в случае, если число третьих записей, присутствующих в третьей структуре данных, относящейся к первому объекту, равно нулю, формируют (112) отсутствующий сигнал идентификатора, иначе проверяют (114), равно ли число третьих записей, присутствующих в третьей структуре данных, относящейся к первому объекту, одному; и
- в случае, если число третьих записей, присутствующих в третьей структуре данных, относящейся к первому объекту, равно одному, формируют (116) сигнал связывания.
5. Устройство обнаружения физических связей между электронными идентификаторами и объектами, к которым физически прикреплены электронные идентификаторы, причем каждый электронный идентификатор дополнительно связан с соответствующим кодом, причем устройство содержит:
- структуру (4) обнаружения;
- средство (2) перемещения, выполненное с возможностью перемещать объекты вдоль направления (М) перемещения, так чтобы они проходили через структуру обнаружения;
- первое и второе средства (24а, 26, 22) измерения, выполненные с возможностью определять для каждого объекта первый момент (tIN(x)) времени и второй момент (tOUT(x)) времени соответственно, указывающие на вход и выход объекта из структуры обнаружения;
- третье средство (28,22) измерения, выполненное с возможностью определять для каждого объекта соответствующий более высокий второй момент (tID(x)) времени, следующий за соответствующим вторым моментом времени; и
- средство (16, 18, 20) обнаружения, выполненное с возможностью выполнять обнаружения электронных идентификаторов, причем каждое обнаружение относится к соответствующему обнаруженному электронному идентификатору и выполняется в соответствующий момент (tr) обнаружения, причем упомянутое средство обнаружения дополнительно выполнено с возможностью формировать сигналы событий, указывающие соответствующие моменты обнаружения соответствующих обнаружений, причем каждый из упомянутых сигналов событий дополнительно указывает код соответствующего электронного идентификатора;
отличающееся тем, что каждый из упомянутых сигналов событий дополнительно указывает соответствующую интенсивность обнаружения, и дополнительно содержащее:
- первое средство (22) обработки, выполненное с возможностью формировать в соответствии с сигналами событий соответствующие первые записи (301) первой структуры (300) данных, причем каждая первая запись содержит момент обнаружения, код обнаруженного электронного идентификатора и интенсивность обнаружения, которые указаны соответствующим сигналом события;
- второе средство (80) обработки, выполненное с возможностью определять для каждого объекта соответствующий набор записей путем включения в упомянутый набор записей первых записей первой структуры данных, моменты обнаружения которых ниже, чем более высокий момент времени, относящийся к объекту;
- третье средство (22) обработки, выполненное с возможностью формировать для каждого объекта соответствующее число вторых записей (501) соответствующей второй структуры (500) данных на основании соответствующего набора записей, причем каждая вторая запись содержит соответствующий пиковый момент и соответствующий код, а упомянутое третье средство обработки дополнительно выполнено с возможностью вставлять новую вторую запись для каждого кода, рассматриваемого среди кодов, присутствующих в наборе записей, относящихся к объекту, причем вставленная новая вторая запись содержит рассматриваемый код, а пиковый момент вставленной новой второй записи зависит от момента определения первой записи, которая:
- принадлежит к набору записей, относящихся к объекту; и
- имеет рассматриваемый код; и
- имеет максимальную интенсивность обнаружения среди первых записей набора записей, относящихся к объекту, которые содержат рассматриваемый код;
- четвертое средство (22) обработки, выполненное с возможностью формировать для каждого объекта соответствующее число третьих записей (601) соответствующей третьей структуры (600) данных путем вставки новой третьей записи в третью структуру данных, относящуюся к объекту, для каждой второй записи второй структуры данных, относящейся к объекту, пиковый момент которой находится во временном окне (Tw2(x)), относящемся к объекту и имеющем длительность от соответствующего первого момента времени до соответствующего второго момента времени, причем каждая вставленная третья запись содержит код соответствующей второй записи и предполагаемый момент, равный пиковому моменту соответствующей второй записи; и
- средство, выполненное с возможностью обнаруживать физические связи для каждого объекта на основании третьих записей третьей структуры данных, относящейся к объекту.
6. Устройство по п.5, в котором структура (4) обнаружения выполнена из металлического материала и образует полость (6), в которой находится средство (2) перемещения.
7. Устройство по п.6, в котором структура (4) обнаружения имеет форму параллелепипеда, имеющего по меньшей мере частично полые первую и вторую поверхности (8, 10), находящиеся напротив друг друга, между которыми находится средство (2) перемещения, причем размер упомянутого параллелепипеда кратен длине (λ/2) волны.
8. Устройство по п.7, в котором средство (16, 18, 20) обнаружения содержит некоторое число антенн (16), расположенных внутри структуры (4) обнаружения и пространственно удаленных от структуры (4) обнаружения на расстояние, кратное упомянутой длине (λ/2) волны.
9. Устройство по любому из пп.5-8, в котором упомянутое средство (2) перемещения определяет направление (М) перемещения и в котором первое и второе упомянутые средства (24а, 22, 26) измерения содержат первый и второй детекторы (24а, 26) положения, соответственно, которые расположены впереди и позади структуры (4) обнаружения по направлению (М) перемещения, соответственно, причем упомянутое третье средство (22, 28) измерения содержит третий детектор (28) положения, расположенный позади второго детектора (26) положения по направлению (М) перемещения.
10. Устройство по любому из пп.5-8, дополнительно содержащее:
- средство (122), выполненное с возможностью проверять в отношении первого объекта, равно ли число третьих записей (601), присутствующих в третьей структуре (600) данных, относящейся к первому объекту, двум;
- средство (130), выполненное с возможностью, если число третьих записей, присутствующих в третьей структуре данных, относящейся к первому объекту, равно двум, определять следующий момент (tIN(x+1)) входа, относящийся ко второму объекту, в структуру (4) обнаружения;
- средство (130), выполненное с возможностью проверять, находится ли следующий момент входа между первым моментом (tIN(x)) времени и более высоким моментом (tID(x)) времени, относящимся к первому объекту;
- средство (132), выполненное с возможностью, если следующий момент (tIN(x)) входа находится между первым моментом времени и более высоким моментом времени, относящимся к первому объекту, определять расстояние (z(x)) интервала между первым и вторым объектами;
- средство (134), выполненное с возможностью проверять, превышает ли расстояние интервала первое пороговое значение (zth1) расстояния;
- средство (136), выполненное с возможностью, если расстояние интервала превышает первое пороговое значение расстояния, определять пиковое расстояние (k(x)) на основании предполагаемых моментов, присутствующих в третьих записях третьей структуры данных, относящейся к первому объекту;
- средство (138), выполненное с возможностью проверять, превышает ли расстояние интервала второе пороговое значение (kth2) расстояния; и
- средство (140), выполненное с возможностью, если расстояние интервала превышает второе пороговое значение расстояния, связывать объект с электронным идентификатором, имеющим код, который присутствует в третьей записи, содержащей самый старый предполагаемый момент, а иначе формировать (124, 125) сигнал о неопределенности.
11. Устройство по п.10, дополнительно содержащее:
- средство (110), выполненное с возможностью проверять, равно ли число третьих записей (601), присутствующих в третьей структуре (600) данных, относящейся к первому объекту, нулю;
- средство (112), выполненное с возможностью, в случае, если число третьих записей, присутствующих в третьей структуре данных, относящейся к первому объекту, равно нулю, формировать сигнал отсутствия идентификатора;
- средство (114), выполненное с возможностью, в случае, если число третьих записей, присутствующих в третьей структуре данных, относящейся к первому объекту, отлично от нуля, проверять, равно ли число третьих записей, присутствующих в третьей структуре данных, относящейся к первому объекту, одному;
и
- средство (116), выполненное с возможностью, в случае, если число третьих записей, присутствующих в третьей структуре данных, относящейся к первому объекту, равно одному, формировать сигнал связывания.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| РАЗВОДНОЙ ГАЕЧНЫЙ КЛЮЧ | 1927 |
|
SU6555A1 |
| US 7030760 B1, 18.04.2006. | |||

