Изобретение относится к передачам гибкой связью, способам их натяжения и контроля.
Механизмы и агрегаты тракторов и с/х машин приводятся в основном ременными и цепными передачами.
Работоспособность этих передач в значительной степени зависит от начального ее натяжения, поэтому периодический контроль и систематическая корректировка начального натяжения являются обязательным условием обеспечения ее работоспособности.
Особенно это важно для ременных передач.
Основная сложность в обеспечении правильного натяжения ременной передачи заключается в том, что в силу своей упругости контур ременной передачи постоянно и непрерывно удлиняется от вытяжения из-за усталостных процессов и мгновенно в зависимости от передаваемого усилия в рабочей ветви и изменении температуры окружающей среды.
Для приводов сельскохозяйственных машин характерны резкие колебания рабочей нагрузки и температурных режимов.
Известны несколько способов натяжения ременных передач (см. Справочник машиностроителя. В шести томах, т.4., кн. II. - М.: Машгиз, 1963, с.510-513 [1]).
На сельскохозяйственных машинах наибольшее распространение получил способ, основанный на применении натяжного ролика.
Известны несколько вариантов натяжения передачи натяжным роликом с использованием пружин.
Геометрия передачи и элементы практического расчета одного из таких видов передачи ранее широко примененялись в промышленности (см. [1], стр.528-530).
В дальнейшем применение такого способа натяжения получило более подробное теоретическое обоснование, хотя и построенное на ряде серьезных допущений (см. Воробьев И.И. Ременные передачи. - М.: Машиностроение, 1979, с.32-35 [2]).
В настоящее время ввиду явных недостатков от применения в промышленности натяжного ролика на рычаге, шарнирно связанном с осью малого шкива, практически отказались, а для с/х машин он неприменим в принципе по следующим соображениям:
А) с точки зрения теоретической (по утверждению самого автора [2]):
Во-первых, на стр.34, в самом низу, в сноске, отмеченной звездочкой, после формулы 26, автор отмечает, что данный способ не учитывает изменения натяжения, вызванное удлинением ремня от нагрузки.
Во-вторых, недостатком данного способа (см. стр.35 после формулы 27, вторая строка, с середины, «откуда видно…) является непостоянство натяжения передачи от изменения положения ролика относительно контура передачи;
Б) с точки зрения практической:
Устройство дополнительного шарнира на ведущем валу шкива неумолимо ведет к увеличению торцевого габарита передачи. У сельскохозяйственных машин на одном валу может находиться до 14 различных шкивов, поэтому устройство таких натяжников технически невозможно.
Наибольшее распространение на с/х машинах получили натяжные, нажимные или отжимные ролики, устанавливаемые на независимых опорах. Причем ролики на опоре могут устанавливаться жестко или соединяться с ней шарнирно с помощью рычага, качающегося на независимой от передачи опоре.
В передачах с жестко устанавливаемыми роликами натяжение осуществляется только за счет упругости ремня путем фиксирования ролика на опоре с заданным усилием давления на ветвь передачи.
Подпружиненные ролики обеспечивают натяжение как за счет упругости самого ремня, так и упругости пружины, действующей на ролик.
Большей автоматичностью натяжения обладают подпружиненные ролики на качающемся одно- или двуплечем рычаге, получившие наибольшее распространение.
На представленных чертежах номера позиций имеют следующие обозначения:
1 - ведущий шкив (ВШ);
2 - ведомый шкив (ВМ);
3 - ведущая ветвь передачи;
4 - ведомая ветвь передачи;
5 - натяжной ролик;
6 - рычаг ролика;
7 - ось рычага;
8 - пружина натяжная;
9 - резьбовая тяга;
10 - регулировочная гайка;
11 - указатель;
12 - пружина;
13 - резьбовая тяга;
14 - гайка;
15 - храповая рейка;
16 - направляющая рейки;
17 - шарнир;
18 - храповая собачка;
19 - пружина собачки;
20 - демпфер;
21 - сайлент-блок;
22 - гладкая рейка;
23 - направляющая рейки;
24 - пружина;
25 - тело качения;
26 - направляющая рейки;
27 - клин;
28 - пружина;
29 - винт;
30 - храповой сектор;
31 - собачка;
32 - пружина;
33 - рычаг;
34 - механизм свободного хода;
35 - пружина.
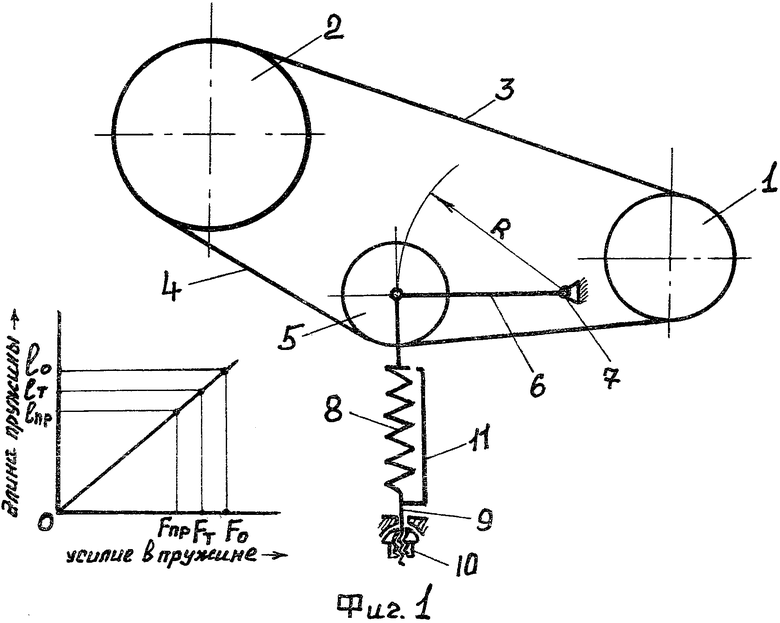
Схема натяжения выглядит следующим образом: Фиг.1, где символами обозначены:
Fo - номинальное усилие в пружине, обеспечивающее заданное натяжение передачи в статическом состоянии;
Fт - текущее значение усилия в пружине;
- длина пружины, соответствующая номинальному усилию в ней;
Fпр - предельно допустимое минимальное усилие в пружине;
- длина пружины, соответствующая начально заданному усилию в ней;
ℓт - текущая дли на пружины.
ℓпр - длина пружины, соответствующая предельно допустимому усилию в пружине;
R - плечо рычага.
На работающей передаче рабочий момент передается от ведущего шкива 1 через ведущую ветвь передачи 3 на ведомый шкив 2.
Ведомая ветвь 4 натягивается роликом 5, установленным на качающемся на оси 7 рычаге 6.
За рычаг 6 одним концом под прямым углом или близко к нему закреплена пружина 8, другой конец пружины 8 соединен с резьбовой тягой 9. Натяжение пружины обеспечивается гайкой 10.
Задание необходимого диапазона усилий на ролик может осуществляться или подбором соответствующей пружины, присоединяемой в конкретной точке на рычаге, или закреплением пружины в разных точках плеча рычага (плечо R).
Причем рычаг может быть одноплечим или двуплечим.
Работает такая схема следующим образом.
Надевают ролик на передачу и гайкой 10 натягивают пружину до такого состояния, при котором в покое обеспечивается заданное начальное усилие натяжения в передаче, контролируемое путем измерения заданной величины прогиба ведущей ветви 3 специальным устройством. Для каждой конкретной передачи допустимый интервал прогиба указывается в паспорте на машину.
В заданном положении гайка 10 фиксируется.
Для облегчения процедуры контроля замеряют в этом положении длину пружины и указывают ее допустимый интервал длины в эксплуатационной документации.
Чаще всего к тяге 9 жестко закрепляют одним концом указатель 11, другой конец которого располагается на одной линии с противоположным торцом растянутой до нужной величины пружины 8.
По мере удлинения передачи пружина сокращается, неизбежно меняется ее длина и пропорционально ей усилие натяжения передачи.
Это наглядно видно на графике Фиг.1.
При заданном натяжении передачи в покое пружина 8 растянута на величину ℓо, а усилие в самой пружине равно Fo.
При удлинении ремня от вытяжения и передаваемого момента ролик перемешается вниз, соответственно величине его перемещения сокращается и пружина до длины текущего значения ℓпр, соответственно изменяется и усилие в пружине до текущего значения Fт, которое меньше, чем Fo.
При сокращении пружины до величины усилие в ней достигает нижнего предельного значения Fпр.
При значениях усилия ниже Fпр. передача перестает работать, т.к. ремень начинает пробуксовывать.
Ввиду того, что ремень в силу своей упругости удлиняется от передаваемого момента, значение Fo подбирают несколько большим, так, чтобы текущее значение натяжения Fт находилось гарантированно в интервале от Fo до Fпр. в течение заданной регламентом периодичности обслуживания передачи.
Указатель 11 обеспечивает возможность визуальной оценки величины сжатия пружины с целью упрощения контроля за передачей.
При превышении предусмотренного интервала между торцом указателя 11 и торцом пружины пружину периодически подтягивают. Причем оценка правильности натяжения и ее корректировка осуществляются только на передаче, находящейся в покое.
Это может вызвать дополнительное искажение в натяжении, если передача в силу кинематической связи не может остановиться с нулевой нагрузкой.
Тем не менее, из-за простоты и как наиболее дешевый этот способ нашел широкое применение.
По такому принципу устроены натяжители передач, например, на комбайне LEXION 580/570 немецкой фирмы «CLAAS» с одно- и двуплечим рычагом.
Применение пружин сжатия в так называемых пружинных цилиндрах мотивируется тем, что при заданном усилии натяжения передачи пружина сжата так, что между витками пружины остается минимально допустимый зазор.
При колебаниях ролика эти зазоры между витками выбираются, но ролик может иметь свободу перемещения только в пределах суммы этих зазоров.
Таким образом, задается допустимый интервал подвижности ролика и исключается его галопирование, а также обеспечивается возможность нормальной работы передачи при знакопеременных нагрузках и в реверсивном режиме.
В этих схемах независимо от типа применяемых пружин используется принцип натяжения передачи, прямо пропорционального величине сжатия пружины.
Основными достоинствами такого способа являются: возможность использования малогабаритных пружин, их унификация за счет разного сочетания точки приложения пружины на рычаге и простота устройства.
Принципиальными недостатками пропорционального способа натяжения являются:
A) - с точки зрения эксплуатации необходимость постоянного контроля правильности натяжения передачи и непрерывной его корректировки с применением инструмента;
Б) - по мере удлинения передачи от вытяжения меняется угол между силовой осью пружины и рычагом ролика, что приводит к искажению начальных условий натяжения передачи;
В) - этот способ не обеспечивает постоянства натяжения не только при удлинении передачи от ее вытяженияЮ но и мгновенного удлинения от рабочей нагрузки.
Это так называемый тригонометрический фактор, который обычно компенсируется дополнительным приращением запаса усилия в пружине при начальном ее нагружении.
Поэтому с целью исключения пробуксовки передачи в межрегулировочном интервале начальное натяжение устанавливается заведомо больше номинального, что отрицательно сказывается не только на ресурсе самого ремня, но и приводит к ускоренному износу опор качения, канавок шкивов, к установке ремней большего габарита с заведомым запасом по тяговой способности и т.д.
Таким образом, приемлемым техническим решением для натяжения конкретной ременной передачи должно быть устройство, обеспечивающее ее постоянное натяжение как при удлинении от вытяжения, так и при упругом удлинении от мгновенно передаваемой нагрузки, создаваемой рабочим моментом на рабочем шкиве.
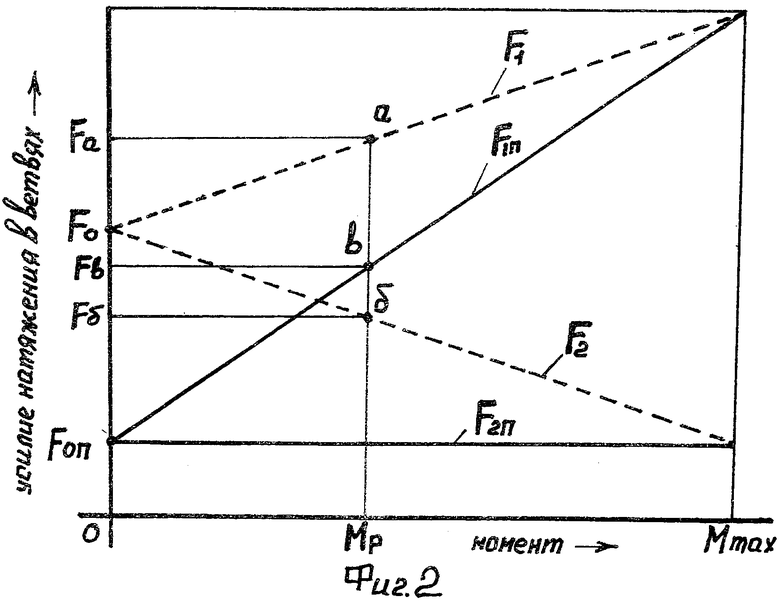
Смысл этого решения в упрощенном виде наглядно можно проиллюстрировать графически (см. Фиг.2 - график зависимости силы натяжения в ветвях передачи от передаваемого момента).
На Фиг.2 использованы следующие обозначения символов:
Ммах - максимальный крутящий момент, при котором наступает буксование на одном из рабочих шкивов;
Мр - текущий рабочий момент;
Fo - начальное статическое натяжение передачи, находящейся в покое при обычном способе;
Fоп - начальное натяжение при постоянном натяжении ведомой ветви;
F2 - натяжение в ведомой ветви при обычном способе натяжения;
F1 - натяжение в ведущей ветви при обычном способе натяжения;
F1п - натяжение в ведущей ветви при постоянном способе натяжения;
F2п - натяжение в ведомой ветви при постоянном натяжении;
Fа, б, в - текущее значение усилий на ветвях работающей передачи.
Тяговая способность передачи оценивается предельным крутящим моментом, при котором наступает буксование ремня на одном из рабочих шкивов (Ммакс).
Чтобы обеспечить заданный момент и исключить буксование ремня, передачу предварительно в статическом состоянии необходимо предварительно натянуть с заданным расчетным путем усилием.
Для обычного способа это усилие начального натяжения (Fo).
При этом в передаче, находящейся в покое, обе ветви - ведущая (F1) и ведомая (F2) - нагружены одинаково с усилием начального натяжения (Fo) (пунктирные линии на графике).
Усилие начального натяжения имеет нижнее предельное значение Fоп.
При величине натяжения в передаче меньше, чем Fоп передача не работает, так как наступает буксование.
Значение Fo определяется расчетным путем, и его величина зависит от многих факторов. Но одним из них является обеспечение стабильного натяжения работающей передачи только в интервале от Fo до Fоп. При этом должна исключаться возможность снижения усилия натяжения в передаче ниже Fоп из-за удлинения передачи.
На работающей передаче при передаче текущего рабочего момента (Мр) усилие в ведущей ветви естественно увеличится на величину рабочей нагрузки (Fa), а в ведомой соответственно уменьшится (Fб).
Если предположить, что некоторое устройство воздействует на натяжной ролик так, что натяжение в ведомой ветви остается постоянным как в покое, так и в работе и не зависит от удлинения ремня как от усталостного вытяжения во времени, так и от мгновенного передаваемого момента, то характер распределения усилий в ветвях передачи будет другим.
В ведомой ветви (F2п) (сплошные линии на графике) постоянное усилие равно начально заданному Fоп и не изменяется от величины передаваемого момента (Мр). Причем усилие начального натяжения (Fоп) значительно ниже усилия, задаваемого обычным способом (Fo).
В рабочей же ветви (Fв) при одном и том же рабочем моменте (Мр) передаваемое усилие (Fв) также будет меньше, чем усилие при обычном способе натяжения (Fa).
Теоретическое обоснование описанной схемы натяжения изложено в статье «Научно-технические основы конструкторских решений по клиноременным передачам и вариаторам для комбайна «Дон-1500». (Мещеряков И.К., Далальянц A.Г., Галаджев Р.С. Тракторы и сельскохозяйственные машины, 1991 г., [№3], с.30-34, п.4).
Принцип самонатяжения натяжным шкивом (СНШ) основан на следующих основных условиях:
Во-первых, натяжение ведомой ветви передачи осуществляется натяжным роликом, находящимся внутри или снаружи контура передачи и обязательно закрепленным на качающемся рычаге.
Это условие продиктовано тем, что при любых способах нагружения ролика рабочим усилием влияние силы трения а опоре качания ролика не оказывает практического влияния на величину рабочего усилия натяжения.
Во-вторых, точка качания рычага ролика подбирается таким образом, чтобы усилие, возникающее от движущегося ремня и действующее через силу трения в подшипниках самого ролика, передавалось бы через рычаг на ось качания рычага практически перпендикулярно усилию натяжения передачи, что также исключает искажение величины силы прямого натяжения передачи.
В-третьих, длину маятникового рычага ролика к конкретной передаче и точку опоры на машине для этого рычага выбирают таким образом, чтобы во всем диапазоне расчетного вытяжения передачи траектория движения оси ролика была близкой к прямолинейной, а точка контакта ремня с ведомой ветвью находилась бы на ее середине с тем, чтобы провисание ветвей с обеих сторон ролика было симметричным.
B-четвертых, положение натяжной пружины и ее крепление на корпусе машины с одной стороны, а с другой - на рычаге ролика производятся так, что при растянутой (сжатой) пружине с заданным усилием между точкой крепления пружины на корпусе и точкой крепления на рычаге усилие раскладывалось бы так, что одна большая часть усилия растянутой пружины действует по оси рычага ролика, передается на ось рычага и на процесс натяжения передачи не оказывает практического влияния. А другая составляющая этой силы действует непосредственно на натяжной ролик нормально к натягиваемой ветви передачи.
Причем эта составляющая усилия во всем диапазоне движения оси натяжного ролика в пределах определенного перемещения ролика близка к постоянной.
В-пятых, на длинных контурах вытяжение ремня достигает очень больших величин, при которых не удается обеспечить во всем диапазоне рабочих перемещений ролика стабильность натяжного усилия.
В предлагаемом принципе СНШ возможное снижение рабочего усилия в пружине при значительных перемещениях ролика компенсируется автоматически путем разложения сил натяжения в полуветвях пропорционально величине прогиба ветви и адекватно частичному снижению рабочего усилия в пружине.
Такой способ позволяет обеспечивать относительно постоянное натяжение в передаче не только от ее явного вытяжения при износе, но и мгновенно поддерживать постоянное натяжение в работе, вызванное удлинением передачи от передаваемого момента.
Обеспечение постоянства усилия натяжения в передаче в этих условиях позволяет существенно снизить величину начального натяжения в передаче, при этом значительно повысить ее тяговые возможности и срок службы.
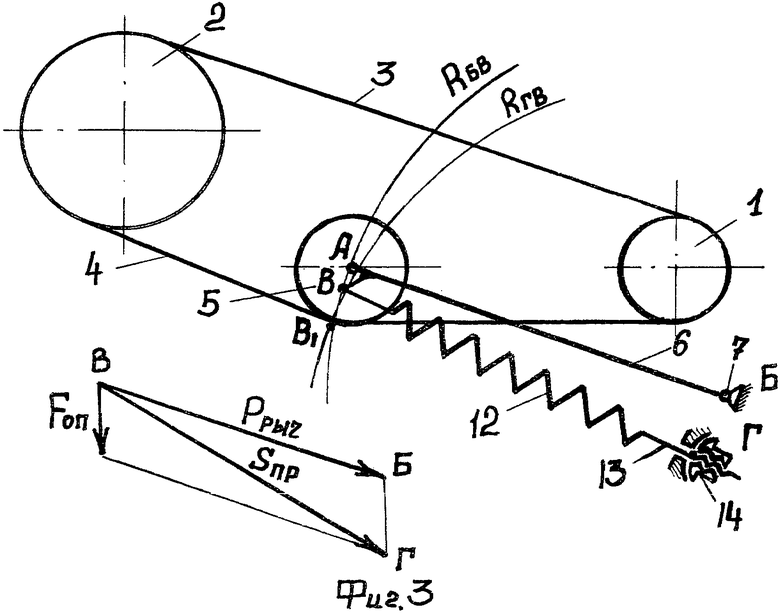
Схематично взаимодействие элементов передачи с обеспечением постоянного усилия натяжения выглядит следующим образом.
Рабочий момент (Фиг.3) от ведущего шкива 1 к ведомому шкиву 2 передается рабочей ветвью передачи 3, на ведомой ветви 4 установлен подпружиненный ролик 5.
Ролик 5 свободно вращается на оси рычага 6 в точке «А».
Сам рычаг 6 посажен на ось 7, закрепленную на корпусе (точка «Б»).
В точке «В», несколько смещенной от продольной оси рычага 6, зацепляется один конец рабочей пружины 12.
Другим концом пружина 12 соединяется с резьбовой тягой 13, проходящей внутри сферической гайки 14, упирающейся в гнездо корпуса (точка «Г»).
Причем линия тяги пружины 12 и продольная ось рычага 7 в начальный момент натяжения находятся в положении, близком к параллельному, а их точки опоры разнесены и располагаются рядом с одной стороны по отношению к натягиваемой ветви передачи, в случае применения в качестве натяжной пружины растяжения.
Расчетным путем определяется величина перемещения ролика для обеспечения требуемого натяжения передачи в определенном диапазоне возможного удлинения передачи.
Исходя из этого определяется диапазон перемещения точки присоединения пружины к рычагу от точки В до точки В1.
Этот диапазон описывается одновременно двумя радиусами: Rбв и Rгв.
Как видно из Фиг.3, на участке от точки В до точки В1 части окружностей, описываемые радиусами Rбв и Rгв, практически накладываются.
Это означает, что предварительно натянутая пружина 12 в предполагаемом диапазоне перемещения натяжного ролика 5 практически не изменяет своей длины и, как следствие, обеспечивает постоянное давление на ролик, который, в свою очередь, давит с усилием, близким к постоянному, на ведомую ветвь передачи.
Причем это давление(натяжение) не зависит от удлинения передачи как от вытяжения, так и от передаваемого момента.
Принципиальной отличительной особенностью натяжения по принципу СНШ является то, что для его функционирования необходимо применять пружины с усилием, в разы превосходящим требуемое усилие натяжения на ролике.
Это хорошо иллюстрируется силовым параллелограммом.
На Фиг.3 видно, что сила натяжения в рабочей пружине Sпр раскладывается на реакцию в рычаге ролика Рр и на действующую на ролик силу натяжения передачи Fоп, соответствующую лишь незначительной части от Sпр.
Но, как показала практика, принцип СНШ хорошо работает только в передачах со строго стационарным режимом нагружения.
В передачах с динамическим нагружением колебания натяжного ролика достигают таких пределов, при которых на работающей передаче полностью снимается начальное натяжение с последующим ударным нагружением - проявляется эффект галопирования ролика.
Это вызвано тем, что в импульсе реактивная сила сопротивления натяжению в ведомой ветви вследствие динамического фактора может быть больше чем сила натяжения Fоп в ролике.
При знакопеременных нагрузках обеспечить гарантированное натяжение передачи практически невозможно.
Поэтому в механизм натяжения ролика вводится резьбовая тяга, ограничивающая предельные колебания ролика и расположенная вдоль оси пружины. Основное назначение тяги - предотвратить отрыв ролика от передачи. Дополнительно она позволяет обеспечить работоспособность передачи при реверсировании нагрузки.
Реализован этот способ, в частности, на натяжном устройстве привода гидронасоса ходовой части комбайна «Дон-1500» (Песков Ю.А., Мещеряков И.К., Ярмашев Ю.Н. и др. - Зерноуборочные комбайны «Дон». - М.: Агрогромиздат, 1986. - 333 с.: ил., стр.194, рис.176 [4]).
Устройство содержит натяжной шкив, рычаг шкива, натяжную втулку, натяжную шпильку, пружину, резиновый амортизатор, гайку и контргайку.
Недостатком известной конструкции является то, что регулировка натяжения осуществляется не только за счет заданной величины растяжения пружины, но и за счет частичного поджима резинового амортизатора. Величина его сжатия устанавливается в заданных пределах, которые необходимо инструментально периодически контролировать.
Как показала практика, если пружина в рабочем диапазоне обладает стабильными и линейными характеристиками, то усилие сжатия резинового демфера не только нелинейно по своей характеристике, но и сильно зависит от качества резины, длительности эксплуатации и даже температуры окружающего воздуха. Эти колебания характеристик резинового амортизатора настолько значительны, что фактическое значение суммарного усилия в тяге может отличаться от 1.1 до 1.6 раза. Исключить резиновый демпфер, ограничивающий амплитуду колебаний ролика в допустимых пределах, невозможно, так как без него колебания ролика в рабочем режиме достигают значений, при которых происходит отрыв ролика от ремня, и натяжение в передаче при этом равно нулю.
Кроме того, необходимо постоянно отслеживать степень вытяжения передачи с определенным интервалом корректировать длину тяги в соответствии с изменившимся положением ролика. В конечном счете это дезавуирует принцип автоматического постоянства натяжения.
Поиски оптимальных технических решений этой проблемы можно условно разделить на два направления: это поиск кинематических схем преодоления проблемы пропорциональности пружин в натяжных устройствах и компенсация этой проблемы за счет автоматизации процедуры натяжения и увеличения межрегулировочного интервала.
К первому направлению принадлежат такие, например, решения, как по патенту RU 2088820, в котором предложена попытка компенсировать изменяющееся плечо пружины путем сложного устройства с применением ползуна.
Но введение в контур управления усилием натяжения нагруженных телескопических пар трения, особенно в условиях чрезвычайной запыленности, в которых работают все сельскохозяйственные машины, не только не приносит желаемого результата, но и приводит к непредсказуемым последствиям (заклиниванию, непредсказуемым вариантам взаимодействия кинематических звеньев и т.д.).
Ко второму направлению можно отнести патент US 2007161444A1 (SCHAFEFLER KG) /12/07/2007. Фиг.2, 6 стр., являющийся наиболее близким к предлагаемому решению. Предложенное решение содержит (Фиг.1) закрепленный на телескопическом штоке натяжной ролик, подпираемый пружиной, действующий на гибкую связь между ведомым и ведущим шкивами, а изменение положения штока отслеживается с помощью храпового механизма.
Принципиальными недостатками известного устройства, осуществляющего прямое воздействие цилиндрической пружины сжатия на натяжной ролик, являются следующие:
а) неизбежно действует принцип пропорциональности усилия на натяжной ролик от степени сжатия пружины, т.е. в начальный момент действует большее усилие натяжения, чем в конце допускаемого интервала, причем начальное сжатие пружины устанавливается заведомо большим;
б) натяжной ролик закреплен в телескопически выдвигаемом штоке. Это обстоятельство может вызывать значительные погрешности от вмешательства сил трения в телескопическом механизме. Применительно же к сельхозмашинам, работающим в сверхинтенсивных условиях запыленности и засоренности, без герметизации и смазки таких механизмов безотказная их работа не гарантируется. А это приводит к значительному удорожанию передачи;
в) пружины сжатия, как известно, обладают очень низкой осевой устойчивостью, то есть способны даже при незначительных сжатиях искривляться по непредсказуемому сценарию.
В предложенной схеме нагружения пружина зацентрирована в стакане кронштейна ролика. При сжатии она естественно будет искривляться, тем более, что на нее воздействует динамическая составляющая.
Искривляясь, пружина будет менять свою характеристику сжатия и, касаясь витками в точках изгиба по поверхности стакана, будет дополнительно искажать силу натяжения;
г) Предложенные на Фиг.1 схемы решения являются некорректными по сути, т.к. дополнительно к вышеперечисленным недостаткам появляется еще один фактор, оказывающий существенное влияние на величину натяжения, зависящий от направления вращения передачи.
При одном направлении (Фиг.1) момент от движения гибкой связи будет оказывать дополнительное неконтролируемое усилие натяжения, при другом, естественно, его уменьшать.
В варианте, предложенном на Фиг.2, корректировка натяжения на движущейся передаче теоретически невозможна.
Если рассмотреть характер действия сил на условном рычаге, имеющим с одной стороны жесткую опору качания (19) и опирающимся с другой стороны через шарнир (20) на упругий элемент 21, то следует отметить, что на рычаг воздействует не только усилие натяжения в передаче, но и рабочее усилие в одной из ветвей передачи (6), создаваемое рабочим моментом приводимого механизма (в данном случае генератором).
При направлении вращения ведущего шкива 2 по часовой стрелке усилие нажима рычага на упругий элемент 21 в точке (20), возникающее от рабочего момента, необходимого для привода механизма (18), будет одним, а при вращении ведущего шкива (2) против часовой стрелки это усилие будет меньшим пропорционально соотношению плеч от точки подвеса (19) до точки (20).
А так как усилие предварительного натяжения передачи в основном не превышает 30% от рабочего момента, то из этого вытекает, что в работе элемент (9) не работает, т.к. заперт наглухо рабочим усилием в передаче.
Таким образом, корректировка усилия теоретически возможна только на остановленной передаче.
Исходя из преимущественного применения предлагаемого устройства, по мнению автора патента, на двигателях внутреннего сгорания, известно, что эти двигатели никогда не останавливаются в режиме свободного выбега, исходя из этого в покое возможно частичное натяжение в передачах.
Поэтому оценку правильности натяжения любой ременной передачи на ДВС можно произвести (по рекомендациям всех изготовителей ДВС), только прокрутив вручную передачу для снятия в ней остаточного натяжения.
Предложенное устройство в этом плане может неадекватно реагировать на реальное состояние передачи, а о поддержании постоянства натяжения в динамике не может быть и речи.
Техническим решением задачи является создание устройства, обеспечивающего постоянное натяжение передачи натяжным роликом, закрепленным на маятниковом рычаге, имеющем соотношение усилия трения в опоре качания к рабочему усилию натяжения ролика, не оказывающего практического влияния на усилие натяжения.
Реактивная составляющая, вызываемая мордентом, возникающим от направления движения гибкой связи, передавалась бы на ось качания рычага ролика и не оказывала бы влияния на усилие натяжения в передаче. Усилие натяжной пружины (растяжения, сжатия или любой другой), действующей на ролик, было таковым, чтобы во всем диапазоне рабочих перемещений ролика усилие давления ролика на передачу сохраняется постоянным.
Положение ролика должно непрерывно отслеживаться автоматически с одновременным ограничением допустимых колебаний ролика с целью предотвращения галопирования, при этом должна быть исключена необходимость последующего инструментального контроля.
Указанная цель достигается способом отслеживания изменяющегося положения натяжного ролика по мере вытяжения ремня с помощью связанного с ним механизма свободного хода.
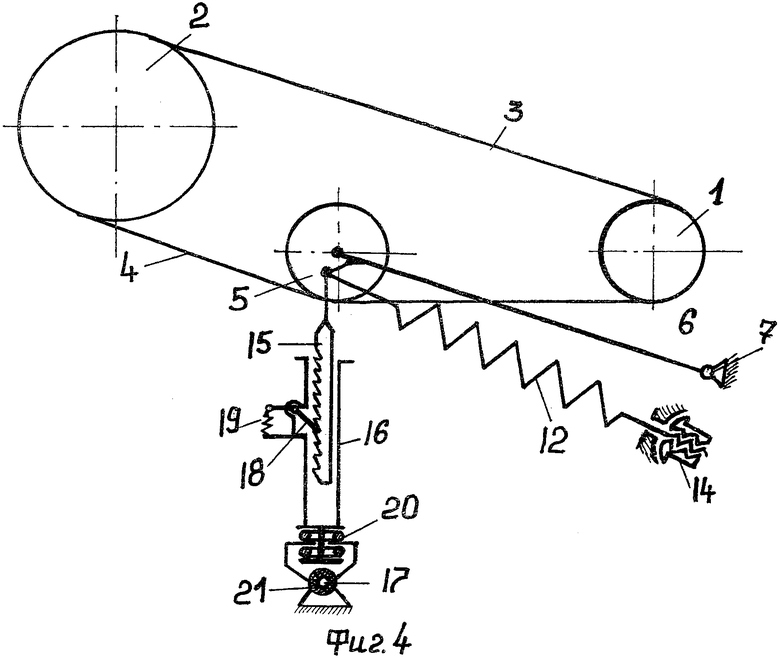
Общий вид устройства показан на Фиг.4.
Устройство состоит из ведущего 1 и ведомого 2 шкивов, крутящий момент между которыми передается передачей - ведущая ветвь 3, ведомая - 4. Натяжение передачи осуществляется натяжным роликом 5 с помощью пружины 12. Кинематика механизма навески подобрана так, что во всем диапазоне вытяжения ремня обеспечивается постоянное натяжение передачи, например принцип СНШ.
К рычагу ролика 6 шарнирно, в направлении рабочего хода ролика закрепляется, храповая рейка 15, свободно перемещающаяся в направляющей 16 шарнирно соединяемой с корпусом машины с помощью шарнира 17. Обратный ход рейки ограничивается храповой собачкой 18, поджимаемой к рейке пружиной 19.
Работает механизм следующим образом. На ведомую ветвь ремня надевают натяжной ролик 5 и, одновременно, отпустив собачку, заводят рейку 15 в направляющую 16. Надевают на рычаг ролика пружину 12 и натягивают ее до нужной величины гайкой 14. Рейка, обратный ход которой будет ограничен включенной собачкой, при прокручивании передачи займет определенное положение.
По мере вытяжения ремень будет удлиняться, будет изменяться и положение ролика 5.
При перемещении ролика большем, чем один шаг зубьев, собачка перескакивает на другой зуб.
Расстоянием между зубьями задаются допустимые пределы колебаний ролика и шаг натяжения.
Рейка 15 с направляющей 16 может иметь сколь угодно свободные зазоры и конфигурацию, исключающие заклинивание рейки в любых направлениях и не влияющих на усилие натяжения передачи.
Задание допустимой амплитуды колебаний ролика при этой схеме может осуществляться двумя способами: или шагом зубьев рейки, или изменением точки подвеса рейки на рычаге ролика с постоянным шагом зубьев на рейке.
На сельскохозяйственных машинах очень часто передачи работают с импульсным и знакопеременным режимом нагружения, а также немало передач с реверсивным режимом работы.
Причем обратное вращение может быть нагружено таким же моментом, как и прямое.
В этом случае храповая рейка обеспечит стабильность передачи в любом варианте ее работы.
При прямом ходе рейка компенсирует удлинение ремня и задает требуемое натяжение, при обратном наглухо запертая рейка будет жестко удерживать ролик и саму передачу в стабильно натянутом состоянии в пределах упругости ремня.
С целью снижения ударных перегрузок направляющая 16 может соединяться с корпусом с помощью резиновых демпферов 20 или сайлент-блоков 21.
При такой схеме в пределах шага зубьев рейка и ролик могут совершать определенные колебания.
Для точных передач, передач, работающих на высоких скоростях, а также передач с импульсивным и динамичным нагружением любые колебания ролика нежелательны.
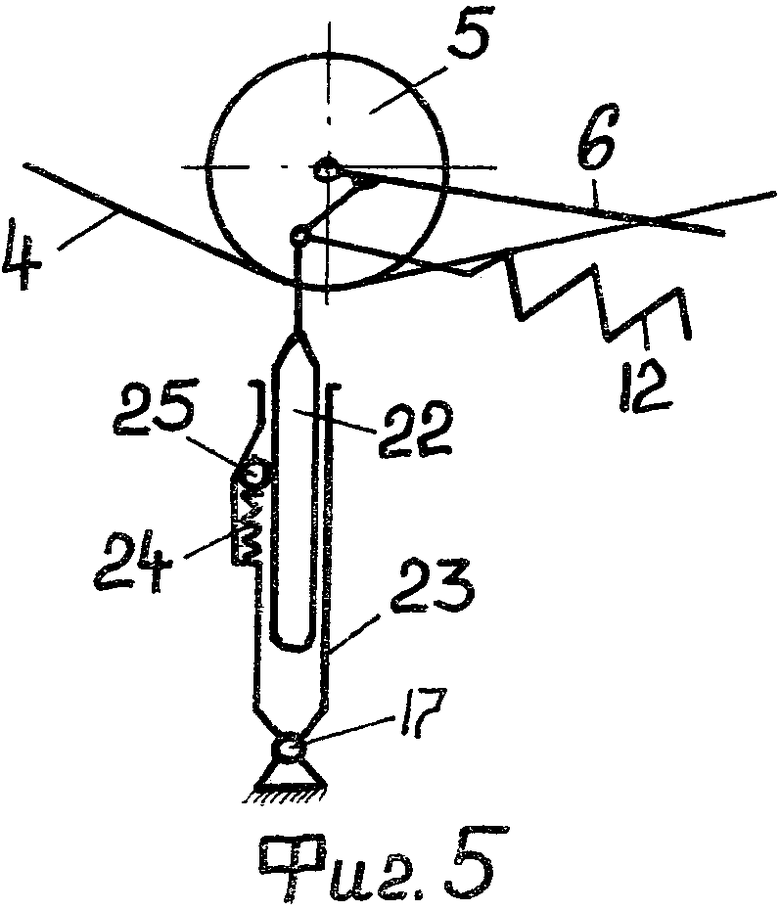
С целью исключения колебаний ролика рейка 22 может быть выполнена гладкой (Фиг.5), а заклинивание ее в направляющей 23 может осуществляться подпираемым пружиной 24 телом качения 25 - шариком или роликом.
На тяжело нагруженных передачах и при больших массах роликов тело качения 25, заклинивающее рейку, может быть малоэффективным и недостаточно надежным.
Поэтому запирание гладкой рейки 22 (Фиг.6) может производиться в направляющее 26 подпружиненным клином 27.
Такая схема позволяет дополнительно обеспечивать регулировку чувствительности путем изменения силы прижатия клина 27 пружиной 28, регулировочным винтом 29.
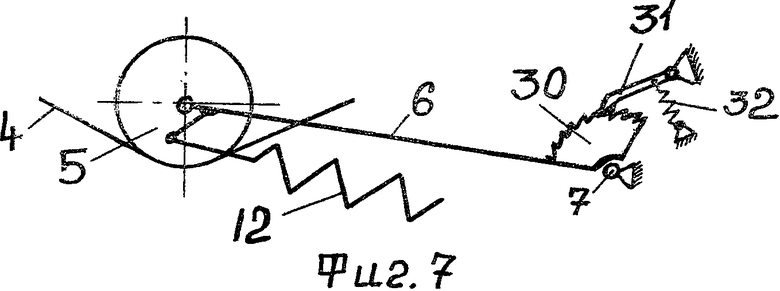
В некоторых случаях на конкретной машине может сложиться ситуация, что технически невозможно разместить храповую рейку с направляющей в направлении рабочего хода натяжного ролика.
В этом случае механизм свободного хода может быть выполнен в виде храпового сектора 30 (Фиг.7), жестко связанного с рычагом 6. Изменение угла положения рычага ролика при этом отслеживалось бы собачкой 31, удерживаемой пружиной 32.
Задание допустимой амплитуды колебаний ролика в этом случае может осуществляться двумя способами: или изменением шага зубьев на секторе, или изменением радиуса самого сектора с постоянным шагом зубьев на нем.
Также как в случае с рейкой, запирание рычага может быть обеспечено гладким сектором с запиранием его телом качения по типу обгонной муфты.
На коротких, слабо нагруженных передачах, а также передачах, работающих со строго стационарным или стабильно спокойным режимом нагружения, эффект применения натяжения по принципу СНШ может не обладать явными преимуществами, а из-за необходимости применения мощных пружин с рабочим усилием, в разы превышающим требуемое усилие натяжения передачи, может быть даже нецелесообразным.
В таких случаях предпочтительней применять механизм свободного хода с пружинами, действующими на рычаг ролика пропорционально.
Для этого целесообразно в качестве натяжных использовать эластичные, повышенной энергоемкости и длины пружины растяжения типа эспандерных или сжатия конические либо спиральные.
Такие пружины характеризуются относительно пологими характеристиками при которых происходит значительное изменение длины пружины при незначительном изменении усилия в ней.
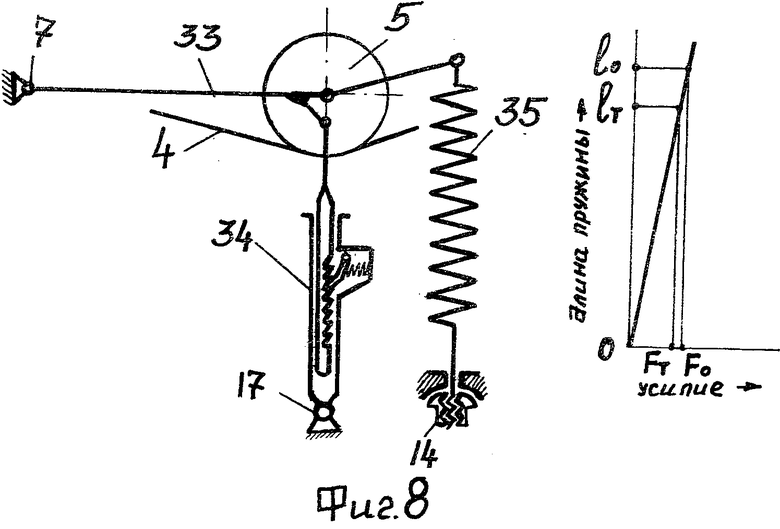
Как вариант, схема такой передачи может выглядеть следующим образом(Фиг.8):
К оси ролика 5, качающегося на рычаге 33, шарнирно присоединен механизм свободного хода 34, например, с храповой рейкой.
Рычаг 33 выполнен удлиненным, так что точка присоединения пружины 35 находится на большем радиусе качания относительно оси рычага 7, чем ось самого ролика 5.
Такая схема позволяет использовать длинную эластичную пружину, например растяжения, изменение длины которой от начальной длины Lo, соответствующей начальному натяжению Fo, до текущего рабочего Fт приводит к незначительному изменению текущего значения усилия Fт (обозначения соответствуют описанным на Фиг.1).
А с учетом соотношения плеч подвески пружины и оси ролика фактическое усилие натяжения передачи на самом ролике с достаточно высокой степенью приближения можно считать постоянным.
Но при совместной работе качающегося на рычаге ролика 5 со связанным с ним механизмом свободного хода 34, автоколебания ролика 5 и его галопирование будут исключены, а также будет обеспечена возможность работы передачи в реверсивном режиме.
Таким образом, предложенные способ и устройства практически независимо от варианта взаимодействия рычага с пружиной и ее вида позволяют обеспечить стабильное натяжение в передаче при ее вытяжении как от износа, так и в динамике при удлинении от передаваемого момента, исключить недопустимые колебания ролика, повысить тяговую способность передачи и ее ресурс, обеспечить автоматическое натяжение передачи.
Дополнительным принципиально важным моментом является то, что способ натяжения передачи качающимся роликом со связанным с ним механизмом свободного хода гарантированно обеспечивает работоспособность передач, работающих в реверсивном режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАТЯЖНОЕ УСТРОЙСТВО | 2012 |
|
RU2568518C2 |
| УКАЗАТЕЛЬ НАТЯЖЕНИЯ ПЕРЕДАЧИ ГИБКОЙ СВЯЗЬЮ | 2012 |
|
RU2523534C2 |
| САМОХОДНЫЙ ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2011 |
|
RU2482653C2 |
| НАТЯЖНОЕ УСТРОЙСТВО | 2004 |
|
RU2315213C2 |
| РЕМЕННАЯ МНОГОПОТОЧНАЯ ПЕРЕДАЧА | 1991 |
|
RU2009385C1 |
| Комбайн зерноуборочный | 2019 |
|
RU2711497C1 |
| НАТЯЖНОЕ УСТРОЙСТВО РЕМЕННОЙ ПЕРЕДАЧИ | 1992 |
|
RU2088820C1 |
| РЕМЕННАЯ ПЕРЕДАЧА | 1999 |
|
RU2159882C1 |
| Универсальная тележка для транспортировки жаток | 2019 |
|
RU2726437C1 |
| РЕМЕННАЯ ПЕРЕДАЧА | 2015 |
|
RU2603288C1 |

Изобретение относится к передачам гибкой связью, способам их натяжения и контроля. Способ натяжения передачи гибкой связью заключается в отслеживании перемещения подпружиненного натяжного ролика (5) с помощью связанного с ним механизма свободного хода. Устройство для осуществления способа использует механизм свободного хода, в котором храповая рейка (15) связана одним концом с рычагом (6) натяжного ролика (5). Другой конец храповой рейки свободно перемещается в направляющей (16), шарнирно связанной с корпусом. Подпружиненная собачка (18) отслеживает перемещение рейки по мере вытяжения передачи. Допустимые колебания натяжного ролика задаются шагом зубьев храповой рейки. Изобретение позволяет путем подбора типа механизма свободного хода задавать алгоритм натяжения и исключить необходимость обслуживания передачи в процессе ее эксплуатации. 2 н. и 6 з.п. ф-лы, 8 ил.
.
1. Способ натяжения передачи гибкой связью, включающий ведущий и ведомый шкивы, гибкую связь, качающийся натяжной ролик и связанную с ним пружину, отличающийся тем, что с целью обеспечения автоматического натяжения передачи с одновременным ограничением величины допустимых колебаний натяжного ролика изменение положения натяжного ролика по мере вытяжения передачи отслеживается с помощью связанного с ним механизма свободного хода.
2. Устройство для осуществления способа по п.1, содержащее натяжной ролик и пружину, обеспечивающую натяжение передачи с гибкой связью роликом, отличающееся тем, что в качестве механизма свободного хода использована связанная шарнирно одним концом с рычагом ролика храповая рейка, а другой конец рейки в направлении действия силы натяжения передачи роликом свободно перемещается в направляющей, шарнирно связанной с корпусом машины, с установленной в ней подпружиненной собачкой, отслеживающей перемещение рейки по мере вытяжения передачи, при этом допустимые колебания ролика задаются шагом зубьев храповой рейки.
3. Устройство по п.2, отличающееся тем, что допустимые колебания ролика при постоянном шаге зубьев храповой рейки задаются изменением точки подвеса рейки на рычаге (6) натяжного ролика.
4. Устройство по п.2 или 3, отличающееся тем, что с целью обеспечения натяжения, исключающего колебания натяжного ролика, механизм свободного хода содержит гладкую рейку, а запирание ее в направляющей осуществляется подпружиненным телом качения.
5. Устройство по п.4, отличающееся тем, что запирание гладкой рейки в направляющей осуществляется подпружиненным клином, причем величина чувствительности задается изменением усилия его прижатия к рейке.
6. Устройство по п.2 или 3, отличающееся тем, что направляющая рейки соединена с корпусом с помощью резиновых демпферов.
7. Устройство по п.6, отличающееся тем, что шарнирное соединение направляющей рейки с корпусом машины выполнено с помощью сайлент-блоков.
8. Устройство по п.2, отличающееся тем, что в качестве механизма свободного хода использован храповой сектор, установленный на оси качания плеча натяжного ролика и жестко с ним связанный, при этом допустимые колебания натяжного ролика задаются шагом зубьев на храповом секторе или радиусом храпового сектора при постоянном шаге зубьев на нем.
| US 2007161444 A1, 12.07.2007 | |||
| DE 4017630 A1, 23.01.1992 | |||
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ НАТЯЖЕНИЯ ГИБКИХ ЭЛЕМЕНТОВ | 1996 |
|
RU2132986C1 |

