Настоящее изобретение относится к беспроводным мобильным сетям или точкам доступа беспроводной локальной сети, обладающей функциями определения местоположения пользователя, связанным с ними способам и компьютерным программным продуктам.
УРОВЕНЬ ТЕХНИКИ
В последнее время становится все более важным определение местоположения пользователя с использованием мобильного устройства, чтобы предоставлять надлежащие услуги пользователям, такие как рекомендация ресторана или магазина, или чтобы определять местоположение пользователя для предоставления неотложной медицинской помощи. С другой стороны, также становится важным определение местоположения пользователя для предоставления соответствующим правоохранительным органам информации относительно криминальных субъектов.
Для определения местоположения мобильного устройства разработаны способы, обычно поддерживаемые спутниками, например, с использованием глобальной системы позиционирования, которую широко используют для определения местоположения автомобилей и используют для планирования маршрута и навигации. Однако такие способы имеют недостаток, заключающийся в том, что для них требуются специальные приемники и передатчики, которые пригодны только для решения навигационных задач, и требуется проведение дополнительных технических мероприятий как в устройстве пользователя, так и в инфраструктуре для доставки соответствующих спутников, излучающих надлежащие навигационные сигналы.
Вследствие высокой конкуренции в области инфраструктуры мобильных средств и сбыта устройств среди конкурентов имеется устойчивая тенденция к сохранению мобильных устройств и их инфраструктуры технически простой для поддержания конкурентоспособности при сбыте или для усиления преимущества, обеспечивающего конкурентоспособность. Поэтому имеется большая необходимость в создании службы определения местоположения мобильных устройств, которые будут технически простыми и в то же время надежными и эффективными, а также достаточно точными для определения местоположения пользователя, чтобы имелась возможность предоставления ему или ей соответствующих услуг.
В соответствии с этим были разработаны способы для определения местоположения пользователя путем приема сигнала, излучаемого мобильным устройством пользователя, на неподвижных приемных станциях и вычисления местоположения устройства пользователя на основании различного прохождения сигналов от устройства пользователя до различных неподвижных приемников. В таких условиях является крайне важным, чтобы во всех устройствах, включенных в процесс определения местоположения, соответствующий анализ базировался на общих часах. Точность определения местоположения в такой системе прямо связана с точностью часов и соответствующей синхронностью часов, которые используются для определения задержек прохождения, включенных в процесс определения местоположения.
Один такой способ основан на разности времен прихода (TDOA), и в нем используют разность времен для сигнала, проходящего к двум пунктам назначения, как в косвенном способе вычисления расстояния. При минимум трех базовых станциях, например, прием сигнала от мобильного телефона, разность времен достижения сигналом каждой мачты базовой станции можно использовать для триангуляционного определения местоположения мобильной установки. Системы на основе разности времен прихода не нуждаются ни в каких специализированных антеннах, и в силу этого инфраструктура сохраняется простой. Когда мобильное устройство, местоположение которого должно быть определено, излучает, время прихода сигнала целевого мобильного устройства регистрируется измерительным блоком определения местоположения на основе разности времен прихода на каждой базовой станции или в точке доступа, которая способна принимать сигнал. Поскольку сигнал мобильного устройства проходит с постоянной скоростью (скоростью света), сравнение времени прихода сигнала с любых двух сторон позволяет производить непосредственное вычисление для определения положения мобильного устройства относительно каждой стороны. При построении графика это относительное положение описывается воображаемой гиперболой в пространстве. Целевое мобильное устройство располагается где-либо на этой кривой, хотя требуется дополнительная информация для определения, где оно точно находится. При выполнении такого же вычисления с использованием измерений от третьей базовой станции или точки доступа вычислением разности времени прихода от базовых станций А, В, С, например между базовыми станциями А и С или между базовыми станциями В и С, может быть описана независимая позиционная гипербола. Точка, в которой две гиперболы АВ и ВС пересекаются, является местом нахождения целевого мобильного устройства. Обычно для разности времен прихода требуется точная синхронизация времени на базовой станции или в точках доступа, но не обязательно в целевом мобильном устройстве. Сразу же очевидно, что неточности значений часов могут приводить к большим ошибкам при определении местоположения. Однако для достижения высокой точности часов и соответствующих синхронизирующих часов и связанной с этим процедуры синхронизации требуются технически сложные решения, для которых в то же время требуется адаптация устройств инфраструктуры, таких как базовые станции и, например, точки доступа, для снабжения их подходящим эталоном часов.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Таким образом, существует потребность в получении оценки местоположения мобильного устройства без необходимости в синхронизации часов или дорогих синхронизирующих часах.
Эта задача решается способом согласования по времени в соответствии с пунктом 1 формулы изобретения, устройством для согласования по времени в соответствии с пунктом 13 или 15 формулы изобретения и компьютерным программным продуктом для согласования по времени в соответствии с пунктом 17 формулы изобретения.
Дополнительные выгодные усовершенствования изобретения представлены в зависимых пунктах формулы изобретения.
В способе согласно настоящему изобретению выгодно используется то, что базовые станции беспроводной мобильной сети или точки доступа беспроводной локальной сети расположены на известных местах и поэтому находятся в фиксированном относительном положении. Это позволяет вычислять задержки прохождения сигнала или сигналов маяка, передаваемых среди прочих этими станциями и принимаемых индивидуально. Эти вычисления основаны на известной скорости распространения сигнала и соответствующем расстоянии между станциями.
Кроме того, определение разности времен прихода позволяет определять отношение значений часов местного времени двух индивидуальных приемных станций, а абсолютные значения не требуются. Поэтому при измерении времен приема уникально идентифицированных сигналов на индивидуальных приемных станциях можно моделировать относительный ход часов пар индивидуальных приемных станций и использовать совместно с абсолютной известной разностью времен прихода для вычисления корректирующего значения для сигнала, принимаемого от мобильного устройства пользователя соответствующими базовыми станциями или беспроводными точками доступа, чтобы корректировать соответствующую разность времен прихода пользовательского сигнала. Следовательно, способом согласно настоящему изобретению решается задача настоящего изобретения без использования дополнительного аппаратного обеспечения, только путем установления отношения соответствующих вычислений на основании соответствующих измерений в точках доступа или соответственно на базовых станциях.
Согласно дальнейшему развитию примера способа согласно настоящему изобретению целесообразно анализировать передачу и временные отметки множества сигналов, что выгодно обеспечит более высокую точность модельной кривой.
Согласно дальнейшему развитию способа настоящего изобретения выгодно передавать сигналы по беспроводному каналу по воздуху, что с достижением преимущества позволяет иметь очень простую инфраструктуру, поскольку нет необходимости протягивать кабели и провода.
Согласно дальнейшему развитию способа настоящего изобретения выгодно реализовывать сигнал в виде сигнала маяка, поскольку это позволяет использовать обычные беспроводные точки доступа или базовые станции, которые уже передают сигналы маяка, подлежащие использованию в контексте настоящего изобретения.
Согласно дальнейшему развитию способа согласно настоящему изобретению предпочтительно, чтобы сигнал представлял собой кадр, поскольку кадры по своей природе обеспечивают преимущество, поскольку имеют свойство уникальной идентификации в номере кадра, и этим дополнительно облегчается реализация способа настоящего изобретения в используемых в настоящее время системах передачи.
Согласно развитию настоящего изобретения также выгодно осуществлять кадр в виде кадра в соответствии с протоколом локальной сети, например, в соответствии со стандартом IEEE 802.11, поскольку в этом случае стандарты можно легко адаптировать к настоящему изобретению, а обычно используемые нормы на передачу пригодны для включения в способ согласно настоящему изобретению.
Согласно осуществлению при моделировании разности времен прихода в способе согласно настоящему изобретению предпочтительно использовать полином совместно с методом наименьших квадратов, поскольку такой полином является простым по математической структуре и в то же самое время удовлетворяет описательным потребностям зависимости значений двух часов согласно способу настоящего изобретения без снижения точности в процессе моделирования.
Согласно дальнейшему развитию осуществления способа согласно настоящему изобретению целесообразно передавать один сигнал до произвольного момента времени и один сигнал передавать после произвольного момента времени, чтобы в соответствии со способом настоящего изобретения повышать точность согласования по времени в произвольный момент времени.
Согласно дальнейшему развитию способа согласно настоящему изобретению выгодно гарантировать передачу одинакового количества сигналов до произвольного момента времени и после произвольного момента времени, чтобы обеспечивать наибольшую точность при определении времени согласно дальнейшему осуществлению способа согласно настоящему изобретению.
Согласно дальнейшему развитию способа настоящего изобретения целесообразно использовать разность времен прихода на другой паре приемных станций, чтобы иметь возможность точно определять местоположение мобильного устройства способом определения местоположения, основанным на разности времен. Это позволяет определять две гиперболы и соответствующую точку пересечения их в качестве места нахождения мобильного устройства.
Настоящим изобретением предлагается устройство для согласования по времени, содержащее:
-по меньшей мере, первое, второе и третье устройства;
-первое устройство имеет передающее средство для передачи, по меньшей мере, первого и второго сигналов с уникальными идентификациями;
-второе и третье устройства имеют приемное средство и часы для приема, по меньшей мере, первого и второго сигналов и обрабатывающее средство для ассоциирования соответствующих измеряемых значений вторых и третьих часов местного времени во время приема соответствующего сигнала с этим сигналом, что приводит к, по меньшей мере, двум парам значений часов местного времени второго и третьего устройств;
-моделирующее средство для моделирования на основании пар значений часов местного времени временной функции зависимости значений вторых и третьих часов местного времени на протяжении времени в виде первой модельной кривой;
-второе и третье устройства дополнительно выполнены с возможностью приема в произвольный момент времени пользовательского сигнала от устройства пользователя на втором и третьем устройствах и ассоциирования времени приема, измеряемого соответствующими вторыми и третьими часами местного времени второго и третьего устройств, с пользовательским сигналом при его приеме, что приводит к паре пользовательских значений часов местного времени второго и третьего устройств,
-обрабатывающее средство для вычисления опорной разности времен начала отсчета прихода (RTDOA) сигнала от первого устройства, принимаемого на втором и третьем устройствах, исходя из фиксированного относительного положения, на основании соответствующего расстояния между первым и вторым устройствами и первым и третьим устройствами и известной скорости прохождения сигнала; и для вычисления разности пользовательских времен прихода (UTDOA) на основании пары пользовательских значений;
-средство для определения в произвольный момент времени значения из первой модельной кривой и на основании этого значения вычисления разности определяемых времен прихода (DTDOA);
-в которой обрабатывающее средство выполнено с возможностью связывать RTDOA и DTDOA, чтобы определять текущий корректирующий коэффициент; и
-для тактирования использовать текущий корректирующий коэффициент для коррекции UTDOA.
Устройство согласно настоящему изобретению выгодно содержит минимальное количество приемных устройств, необходимых для достижения согласования по времени согласно настоящему изобретению, чем обеспечивается простая конкурентная инфраструктура, допускающая решение задачи настоящего изобретения.
Предпочтительным образом, дальнейшее развитие устройства согласно настоящему изобретению позволяет использовать сервер для задач с большой вычислительной интенсивностью, решение которых необходимо, и в то же время позволяет дополнительно упрощать приемные станции, и необходима только соответствующая передача соответствующей идентификации принимаемых сигналов совместно со связанной с ней временной информации на вычислительный сервер для вычисления местоположения мобильного устройства.
Предпочтительным образом, компьютерный программный продукт согласно изобретению предоставляет простое средство для реализации способа согласно настоящему изобретению на соответствующих базовых станциях и точках доступа за счет обеспечения средства памяти и переноса.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется посредством примеров и осуществлений, показанных на чертежах, на которых:
фиг. 1 - вид простого устройства из передатчиков и приемников согласно осуществлению настоящего изобретения;
фиг. 2 - пример относительного хода часов двух приемных станций;
фиг. 3 - пример передачи сигналов согласно осуществлению настоящего изобретения;
фиг. 4 - блок-схема последовательности действий, поясняющая оценивание местоположения пользователя на основании разности времен прихода, согласно осуществлению настоящего изобретения;
фиг. 5 - пример компьютерного программного продукта согласно настоящему изобретению; и
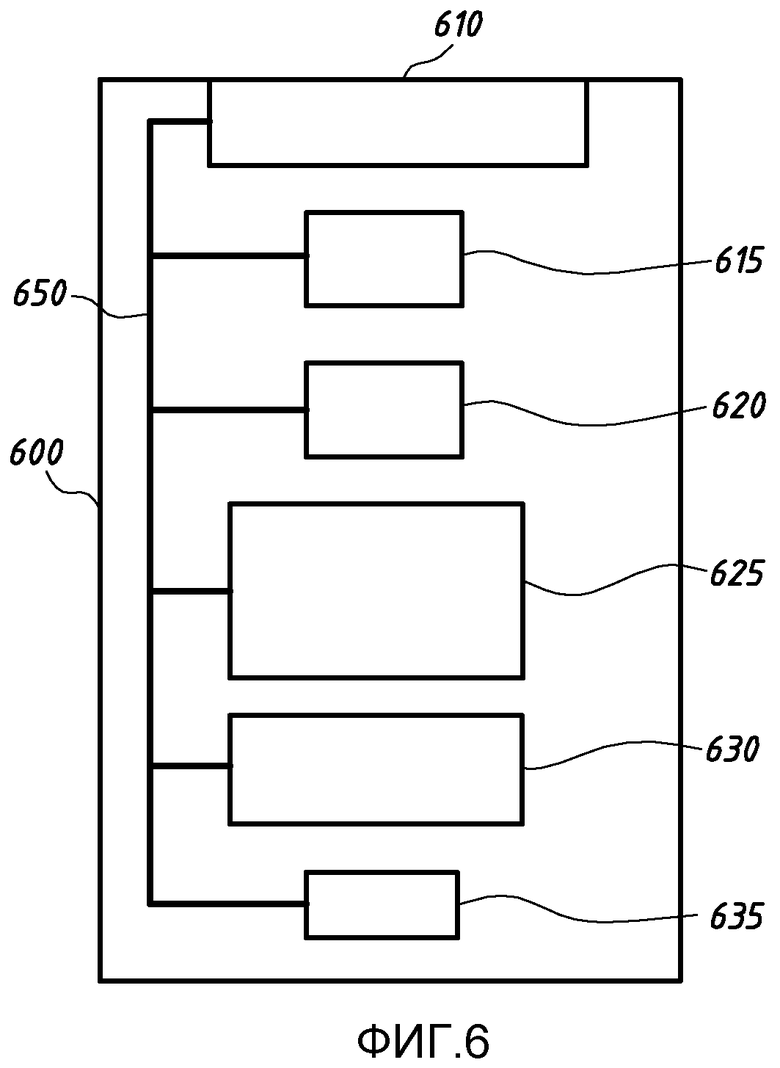
фиг. 6 - пример устройства в конфигурации согласно настоящему изобретению.
ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Настоящее изобретение описано применительно к конкретным осуществлениям и с обращением к определенным чертежам, но изобретение не ограничено ими, а только формулой изобретения. Рассматриваемые чертежи являются лишь схематичными и не ограничивающими. С иллюстративными целями на чертежах размеры некоторых элементов могут быть преувеличены и чертежи выполнены не в масштабе. Использование в настоящем описании и формуле изобретения термина «содержащий» не исключает наличия других элементов или этапов. Использование существительного в единственном числе включает в себя множественное число этого существительного, если иное не оговорено особо.
Термин «содержащий», используемый в формуле изобретения, не следует интерпретировать как ограничивающий перечисляемые ниже средства; это не исключает других элементов или этапов. Поэтому объем выражения «устройство, содержащее средства А и В», не следует ограничивать устройствами, состоящими только из компонентов А и В. Применительно к настоящему изобретению это означает только то, что релевантными компонентами устройства являются А и В.
Кроме того, в описании и формуле изобретения термины «первый», «второй», «третий» и т.п. используются для проведения различия между подобными элементами, а не обязательно для описания последовательного или хронологического порядка. Должно быть понятно, что термины, используемые таким образом, являются взаимозаменяемыми в соответствующих обстоятельствах и что осуществления изобретения, описываемые в этой заявке, могут работать в другой последовательности, а не в описанной или показанной в этой заявке.
Кроме того, термины «верхний», «нижний», «над», «под» и т.п. используются в описании и формуле изобретения для описательных целей и не обязательно для описания относительных положений. Должно быть понятно, что термины, используемые таким образом, являются взаимозаменяемыми в соответствующих обстоятельствах и что осуществления изобретения, описываемые в этой заявке, могут работать при других ориентациях, а не при описанных или показанных в этой заявке.
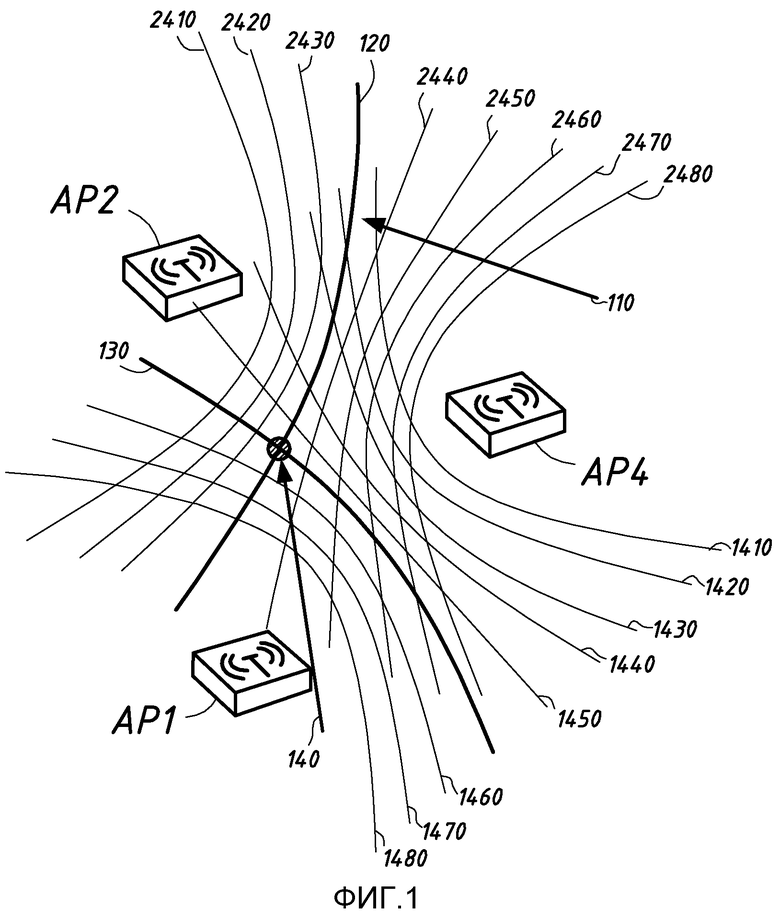
Приведенная в качестве примера на фиг. 1 основная конфигурация, предназначенная для реализации способа настоящего изобретения, содержит три точки АР1, АР2 и АР4 доступа или состоит из них. Без ограничения изобретения эти точки доступа могут быть любыми станциями, которые способны передавать соответствующие принимаемые сигналы, например радиосигналы. Потенциально каждая может быть приемопередатчиком, то есть как передатчиком, так и приемником, что дает определенные преимущества в части того, что не надо иметь отдельные передающие и приемные станции, и поэтому обеспечивается оптимальное использование ресурсов. В этом случае точки доступа могут точками доступа беспроводной локальной сети, например, в соответствии со стандартом 802.11 IEEE. Без всякого ограничения точки доступа могут быть станциями, которые способны передавать соответствующий принимаемый сигнал, соответствующее количество сигналов, особенно радиосигналов, которые могут быть снабжены уникальным идентификатором или, по меньшей мере, элементом, который позволяет идентифицировать сигнал как уникальный сигнал. Например, можно представить себе, что каждый сигнал имеет особый формат и поэтому уникальный идентификатор сигнала, являющегося уникальным сигналом, представляет собой формат.
В этом случае станция АР4 передает уникальный сигнал или последовательность уникальных сигналов, который принимается/которые принимаются станциями АР2 и АР1. При приеме уникального сигнала или сигналов приемные станции АР1 и АР2 с помощью своих часов местного времени ассоциируют уникальный сигнал со временем, измеряемым их часами местного времени в момент приема уникального сигнала. Без какого-либо ограничения такая связь может быть установлена для одного, двух или множества уникальных сигналов, чтобы запротоколировать зависимость значений часов местного времени станций АР1 и АР2 в связи с совместным приемом одного и того же индивидуального уникального сигнала от станции АР4.
Часто беспроводные точки доступа, такие как станции АР1, АР2 и АР4, имеют простую конструкцию, и поэтому в этих точках доступа используются только очень дешевые часовые устройства, которые обладают недостатком, заключающимся в том, что в этих часах температурный дрейф влияет на отклонение значений часов, например, на дрейф фазы и/или на уход частоты часов, и это налагает определенную неточность на согласование по времени индивидуальных станций с АР1 по АР4. Абсолютные отклонения и разности хода различных часов станций с АР1 по АР4 могут быть выражены количественно в микросекундах отклонения за секунду или эквивалентно в частях на миллион. Эти отклонения можно аккумулировать или накапливать и поддерживать в течение длительных периодов, составляющих при измерении многие секунды или минуты. Этим обеспечивается точное измерение. Аккумулированные отклонения или любое, связанное с ними значение можно сохранять, например, в используемой по выбору машине определения местоположения. Машина определения местоположения может быть реализована в виде сервера, выполняющего вычисление разности времен прихода на различные станции.
В случае измерения разности времен прихода можно вычислять разность времен пробега сигнала между устройством пользователя (непоказанным), которое может быть реализовано в виде мобильного устройства, и двумя или большим количеством приемных станций, например АР1, АР2 и АР4.
На фиг. 1 гиперболами, обозначенными с 2410 по 2480, показаны линии разностей постоянных задержек между АР2 и АР4, тогда как гиперболами, обозначенными с 1410 по 1480, отмечены линии разности постоянных задержек между станциями АР1 и АР4. Как показано указателем 110, в данном примере место нахождения пользователя должно быть где-то на гиперболе 120. С другой стороны, как также показано указателем 140, место нахождения пользователя должно быть где-то на гиперболе, обозначенной позицией 130. Поэтому место нахождения пользователя также показано позицией 140 на пересечении гипербол 110 и 130, соответственно можно идентифицировать местоположение мобильного устройства пользователя.
В осуществлении настоящего изобретения используется то, что расстояния между известными станциями с АР1 по АР4 являются известными, поскольку они находятся в фиксированном относительном положении, и что на основании расстояний между станциями, точное время прохождения соответствующим образом передаваемых сигналов можно вычислять с учетом расстояния и скорости прохождения. Установление разности времен прихода на основании точного вычисления позволяет устанавливать связь этой точной разности времен прихода с разностью времен прихода, которая измеряется неточными часами двух рассматриваемых станций. На основании модели временной зависимости разности времен прихода на две приемные станции можно выполнять анализ, чтобы идентифицировать соответствующее значение ошибки разности времен прихода, измеряемой неточными часами двух приемных станций. Кроме того, на основании точного вычисления система может вычислять корректирующее значение и тем самым получать точную разность времен прихода в произвольный момент времени, имеющую отношение к этим двум приемным станциям. Например, этого можно достигать установлением отношений точных значений в произвольный момент времени к моделируемому значению в этот момент времени, чтобы вычислять текущее корректирующее значение. В этом контексте предпочтительными математическими операциями являются деление относительно значений и умножение для вычисления скорректированной разности времен прихода для сигнала, принимаемого от устройства пользователя, относительно текущего корректирующего значения.
Такой процесс можно выполнять для любых двух приемных станций, которые являются частью конфигурации, показанной в осуществлении из фиг. 1.
Следовательно, в соответствии с настоящим изобретением не требуется определять абсолютные значения, а вместо этого необходимо определять только относительный ход часов между любыми двумя приемными станциями. Конечно, с другой стороны, разность времен прихода можно также определять с помощью устройства пользователя, для чего требуется некоторое количество дополнительных мероприятий для приема и передачи соответствующих данных на устройство пользователя и/или с него. Чтобы выполнять точную оценку местоположения устройства пользователя, предпочтительно иметь точность сопоставления по времени порядка 1 нс, что соответствует одной трети метра.
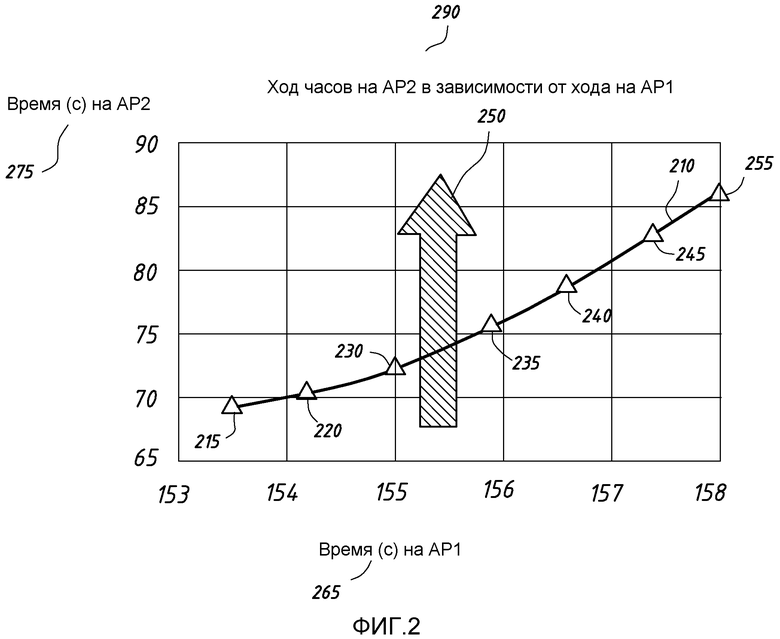
На фиг. 2 дан пример хода часов на двух станциях АР1 и АР2, показанный позицией 290. По вертикальной оси позицией 275 обозначено местное время часов на станции АР2 и по горизонтальной оси позицией 265 обозначено время на станции АР1. Треугольники на диаграмме, показанные позициями 215, 220, 230, 235, 240, 245 и 255, представляют времена приема уникальных сигналов на станции АР1 относительно АР2. Если часы на АР1 и АР2 были настроены правильно и очень точно, не должно быть кривой, соединяющей треугольники, и все они должны лежать на прямой линии.
В этом случае известное время прохождения сигнала, основанное на вычислении по скорости прохождения сигнала и расстоянии между АР4 и АР2 и АР4 и АР1, соответственно, вычтено из времен приема сигнала, который может быть сигналом маяка от АР4. Когда местоположения станций известны, такое вычисление может легко выполнять специалист в данной области техники. Также понятно, что кривую, представленную позицией 210, соединяющую различные треугольники, можно моделировать любым подходящим регрессионным или интерполяционным способом, например простым полиномом. Однако другие подходящие способы моделирования являются возможными, подобные приближению значений нейронной сетью, обученной парами измеряемых значений часов местного времени. Позицией 250 показано время в произвольный момент времени, в который сигнал от мобильного устройства пользователя принимается на соответствующих станциях АР1 и АР2. Гладкая кривая между измерениями может быть получена подбором полиномиальной кривой, который даст разность времен между АР1 и АР2 в период наблюдения пользователя.
Такая зависимость значений неточных часов местного времени дополнительно поясняется, например, в конфигурации, показанной на фиг. 3. В частности, здесь показаны часы местного времени станции АР2, обозначенные позицией 321, и часы местного времени станции АР1, обозначенные позицией 311. Также показано, что время прохождения сигнала между АР4 и АР2, обозначенное символом Тр4,2, известно на основании вычисления по расстоянию и скорости прохождения, что также справедливо для времени прохождения сигнала, передаваемого между АР4 и АР1, обозначенного Тр4,1. Измерения, получаемые для сигнала, передаваемого от станции АР4, и связанные с ними временные соотношения могут передаваться, например, на сервер, показанный позицией 380, выполняющий требуемые вычисления, а также получающий соответствующую моделирующую функцию, например, регрессионным анализом, одним примером которого является подбор полиномиальной кривой, при этом передача представлена в качестве примера стрелкой, обозначенной позицией 350. Например, относительный ход часов может быть получен с помощью измерений в воздушной среде.
Например, коррекция времени прохождения может выполняться следующим образом. Можно предположить, что на известных местах имеются две приемные станции АР1 и АР2. Часы АР1 и АР2 отмеряют наносекунды и не синхронизированы друг с другом. Поэтому их время отклоняется относительно друг друга. С другой стороны, каждая из АР1 и АР2 может точно маркировать время одного и того же принимаемого сигнала, например в виде кадра, от единственной передающей станции АР4. По скорости прохождения сигнала и расстоянию между станциями известно, что кадр, передаваемый АР4, проходит 0,3 м за 1 нс и поэтому при нахождении АР4 на расстоянии 30 м от АР1 и на расстоянии 18 м от АР2 создается задержка прохождения от АР4 до АР1, которая составляет 30 м/0,3 м/нс=100 нс, тогда как задержка прохождения от АР4 до АР2 составляет 18 м/0,3 м/нс=60 нс. Например, АР1 маркирует время кадра, принимаемого от АР4, отметкой 629154927 нс, тогда как АР2 маркирует время того же самого кадра, принимаемого от АР4, отметкой 402549572 нс. Например, в этом случае АР1 вычисляет, что значение его часов в момент времени, когда АР4 передавала кадр, было 629154927-100=629154827 нс, тогда как АР2 вычисляет, что значение его часов в момент времени, когда АР4 передавала кадр, было 402549572-60=402549512 нс. Это приводит к результату, заключающемуся в том, что в момент, когда значение часов АР1 было 629154827 нс, значение часов АР2 было 402549512 нс и наоборот. Однако результат вычисления известной задержки прохождения может быть вычтен в любое время в процессе вычисления, поскольку он остается известной постоянной в случае, когда остаются постоянными положения станций, что является необходимым условием. Поэтому всегда возможен иной порядок вычислений. Подбор кривой регрессии, например, кривой, описываемой полиномом, к наблюдаемому относительному ходу часов станции АР можно выполнять следующим образом. Предпочтительно контролировать относительный ход часов в течение отрезка времени, содержащего n наблюдений, которые охватывают момент времени, в который необходимо устанавливать относительную временную привязку наблюдения пользователя. Например, при регистрации n времен наблюдения, которые, в конечном счете необходимы для коррекции по известным временам прохождения одних и тех же передач маяка, обозначаемых TAP1,i и TAP2,i, кривую, описываемую полиномом, можно подобрать к наблюдаемым данным, и этот подбор представляет собой, например, подбор методом наименьших квадратов, например в виде
ТАР2=а0+а1ТАР1+а2(ТАР1)2.
После этого коэффициенты а0, а1 и а2 можно легко получить из наблюдаемых данных при использовании матричного метода наименьших квадратов в соответствии с
a=(XTX)-1XTY,
где а является вектором-столбцом, состоящим из а0, а1 и а2, Y является вектором-столбцом n наблюдений АР2 от ТАР2,1 до TAP2,n и Х является матрицей размера n×3, образуемой из наблюдений АР1, например:
Дальнейшие подробности можно получить в соответствии с: http://mathworld.wolfram.com/LeastSquaresFittingPolynomial.html.
В этом примере используется полином второго порядка, в котором а0 представляет фиксированное отклонение времени; а1 представляет фиксированное отклонение частоты и а2 представляет линейный дрейф частоты со временем. Без ограничения изобретения также можно использовать полиномы более высоких порядков, хотя решение второго порядка, скорее всего, должно быть достаточно хорошим, дающим форму кривой, показанную на фиг. 2, которая не является сложной для понимания кривой. Однако существует зависимость между порядком полинома и количеством измерительных наблюдений, которые требуются для его определения, для полинома J-го порядка требуются, по меньшей мере, J+1 измерительных наблюдений. На практике предпочтительно выполнять большее количество измерений, если необходимо снижать влияние шума измерений.
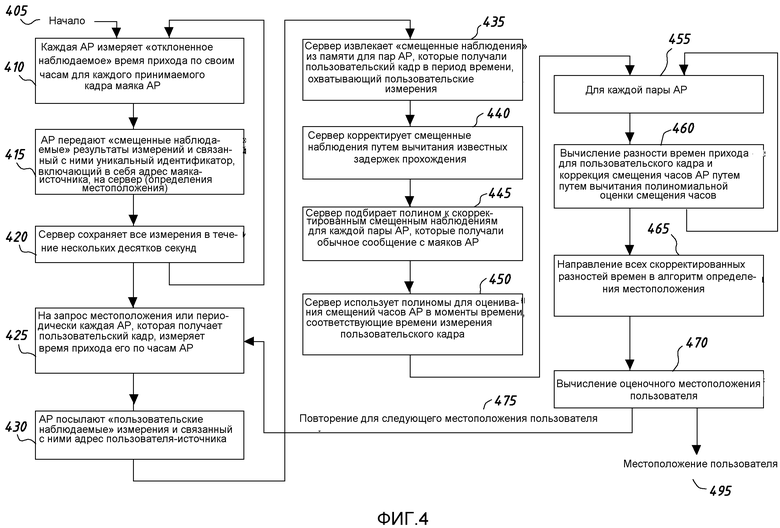
На фиг. 4 на блок-схеме последовательности действий согласно осуществлению настоящего изобретения показан пример процесса определения положения.
Процесс начинается на этапе 405. На этапе 410 каждая станция измеряет неточное время прихода сигнала по собственным часам для каждого принимаемого сигнала. В этом осуществлении на этапе 415 станции посылают данные наблюдений, означающие время прихода индивидуального сигнала и соответствующую идентификацию сигнала, например, на сервер определения местоположения, который может использоваться для вычисления местоположения. В этом случае на этапе 420 сервер сохраняет все измерения в течение периода времени, например в течение периода времени, составляющего несколько десятков секунд. На этапе 425 в случае запроса местоположения (или как вариант периодически) каждая станция, принимающая соответствующий сигнал, например кадр пользователя, измеряет время прихода каждого конкретного кадра пользователя, представляющего пользовательский сигнал, с использованием часов местного времени и на этапе 430 посылает на сервер определения местоположения результат измерения наблюдавшегося пользовательского сигнала и связанную с ним идентификацию, а также время. На этапе 435 сервер извлекает сохраняемые значения для передачи сигналов между беспроводными станциями, соответствующими беспроводным станциям, которые принимали пользовательский сигнал, и на этапе 440 корректирует данные наблюдения, относящиеся к извлекаемой связи между беспроводными станциями, путем вычитания известных задержек прохождения, основанных на скорости прохождения и относительных положениях, соответственно известным расстояниям. Следовательно, на этапе 440 регрессионный анализ, такой как подбор полинома, осуществляется относительно пар скорректированных значений для каждой пары беспроводных станций, которые принимали общее сообщение при обмене между беспроводными станциями. На этапе 450 сервер использует, например, полиномы для оценивания отклонений часов беспроводных станций в моменты времени, соответствующие времени, когда принимался пользовательский сигнал. Для каждой взятой на этапе 455 пары беспроводных станций на этапе 460 вычисляется разность времен прихода пользовательского сигнала и производится коррекция с учетом коэффициента, определяемого на основании сохраняемых значений от соответствующей пары беспроводных станций и вычисляемой полиномиальной оценки отклонения часов. На этапе 465 информация о скорректированных разностях времен прибытий направляется в алгоритм определения местоположения и на этапе 470 оценочное местоположение пользователя вычисляется по пересечению двух гипербол, показанных на фиг. 1, обозначенных позициями 120 и 130, при этом определяется местоположение пользователя, показанное стрелкой 140, которое извлекается на этапе 495. Позицией 475 обозначено, что такой процесс может повторяться для определения различных местоположений пользователя.
На фиг. 5 показан пример компьютерного программного продукта согласно настоящему изобретению. Позицией 500 показан носитель данных, который содержит программный код 520, представляющий любые этапы способа согласно настоящему изобретению. Такой компьютерный программный продукт представляет собой простой логический объект для переноса способа настоящего изобретения и для реализации его на передающих и приемных станциях с АР1 по АР4 настоящего изобретения в случае, когда они снабжены сетевым интерфейсом или соответствующим устройством считывания данных. Носитель данных настоящего изобретения может быть отвечающим требованиям носителем данных, таким как магнитный или оптический носитель, или аппаратным носителем данных, таким как флэш-память. Он также может быть представлен сигналом, который передается по сети в соответствии с определенным сетевым протоколом, реализуемым в проводной сети или беспроводной сети, для загрузки программного кода из одного компьютера в другой компьютер.
На фиг. 6 показан пример станции, которую можно использовать в устройстве согласно настоящему изобретению. Позицией 600 показана беспроводная станция, например точка доступа или другое беспроводное или связанное проводами устройство, способное передавать и/или принимать уникальные сигналы, предпочтительно идентифицируемые уникальным идентификатором, таким как, например, номер кадра. Она имеет интерфейс 610 ввода/вывода любого вида, будь то механический, электрический или пользовательский, для ввода и отображения данных. Кроме того, станция содержит приемник 615 и передатчик 620, способные, например, излучать и принимать в диапазоне частот глобальной системы подвижной связи (GSM), технологии Bluetooth или беспроводной локальной сети (WLAN) или осуществлять стандартную пакетную связь по проводам или в оптической среде. Контроллер или процессор 625 способен управлять функциями станции 600 и обладает вычислительной мощностью для выполнения требуемых вычислений. Также представлено запоминающее устройство 630, которое может быть любым оптическим, полупроводниковым или магнитным устройством, предназначенным для сохранения данных связи и оперативных данных. Позицией 635 показан источник питания, который может быть батареей или трансформатором, подключаемым к розетке питающей сети. Все внутренние компоненты соединены с помощью соответствующей системной шины 650, гарантирующей надлежащую работу станции 600. Как и станция 600, вычислительный сервер 380 может быть снабжен одним компонентом или всеми компонентами 610, 615, 620, 625, 630 и 650, рассчитанными соответствующим образом для осуществления определения местоположения устройства пользователя и необходимой связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВИСЦЕРАЛЬНОГО ЖИРА | 2008 |
|
RU2425628C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СВЯЗИ БЕСПРОВОДНОЙ ЛОКАЛЬНОЙ СЕТИ С ПРОВОДНОЙ ЛОКАЛЬНОЙ СЕТЬЮ | 1995 |
|
RU2121762C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ЗДОРОВЬЯ | 2010 |
|
RU2529808C2 |
| ПОДАВЛЕНИЕ ВНУТРИКАНАЛЬНОЙ ПОМЕХИ В СЕТИ МИЛЛИМЕТРОВОГО ДИАПАЗОНА | 2018 |
|
RU2770319C2 |
| СРЕДСТВА И СПОСОБЫ ДЛЯ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК ХЭНДОВЕРА ИНТЕГРИРОВАННЫХ СЕТЕЙ РАДИОДОСТУПА | 2005 |
|
RU2384020C2 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ СОВМЕСТНОЙ ПЕРЕДАЧИ С ИСПОЛЬЗОВАНИЕМ МНОЖЕСТВА ТОЧЕК ДОСТУПА ПО СЕТЯМ WLAN | 2019 |
|
RU2769542C1 |
| СТАНЦИЯ, ТОЧКА ДОСТУПА И РЕАЛИЗОВАННЫЕ В НИХ СПОСОБЫ ОБРАБОТКИ ПЕРЕДАЧ В СЕТИ БЕСПРОВОДНОЙ СВЯЗИ | 2015 |
|
RU2681350C1 |
| СПОСОБ ВЫБОРА КОДА СКРЕМБЛИРОВАНИЯ | 2010 |
|
RU2548898C2 |
| СПОСОБ ПЕРЕДАЧИ ДАННЫХ В СИСТЕМАХ СВЯЗИ | 2007 |
|
RU2436249C2 |
| Способ виброиспытаний изделий | 1989 |
|
SU1753321A1 |
Изобретение относится к области радиотехники, а именно к беспроводным мобильным сетям или точкам доступа беспроводной локальной сети, и может быть использовано при определении местоположения пользователя. Технический результат заключается в обеспечении возможности получения оценки местоположения мобильного устройства без необходимости в синхронизации часов на различных приемных станциях. Для этого предоставляются способ, устройство и компьютерный программный продукт, предназначенные для использования при согласовании по времени относительного хода часов индивидуальных приемных станций, а также при соответствующем моделировании для получения разности времен прихода сигнала от устройства пользователя, которая может использоваться для коррекции разности времен прихода на основании моделируемого хода часов и приводит к коррекции согласования по времени принимаемых пользователем сигналов, что применимо к множеству пар приемных станций, и в том числе к передаваемым сигналам маяка, и позволяет корректировать оценку местоположения устройства пользователя. 4 н. и 11 з.п. ф-лы, 6 ил.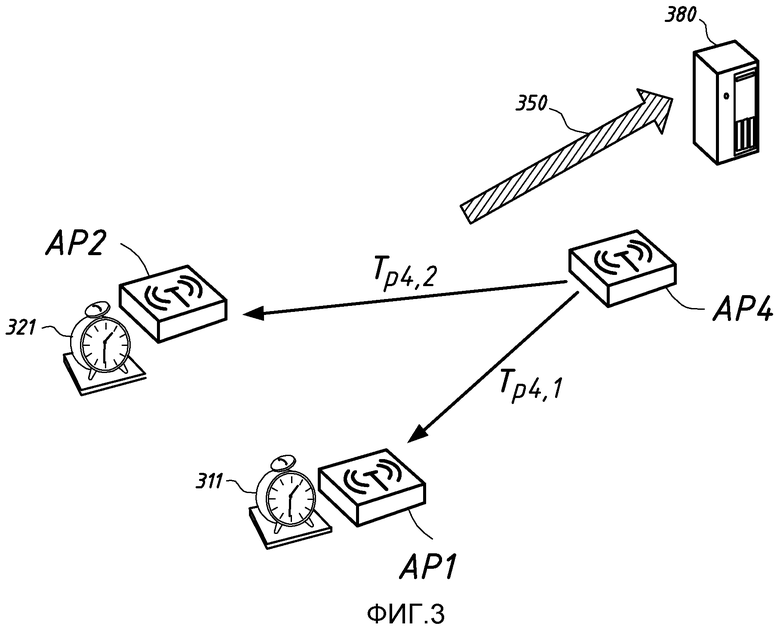
1. Способ согласования по времени с использованием по меньшей мере первого устройства (AP4), второго устройства (AP2) и третьего устройства (AP1) в фиксированном относительном положении, при этом способ содержит этапы, на которых:
- передают по меньшей мере первым устройством (AP4) последовательность уникальных сигналов, содержащую по меньшей мере первый и второй сигналы, имеющие уникальные идентификации;
- измеряют времена приема уникально идентифицированных сигналов в по меньшей мере втором (AP2) и третьем (AP1) устройствах с помощью соответствующих вторых и третьих часов (321, 311) местного времени второго и третьего устройств;
- ассоциируют по меньшей мере вторым (AP2) и третьим (AP1) устройствами время приема с соответственно первым и вторым сигналами при приеме их, что приводит к по меньшей мере двум парам значений часов местного времени второго (AP2) и третьего (AP1) устройств;
- на основании пар значений часов местного времени моделируют временную функцию зависимости вторых и третьих часов местного времени на протяжении времени в виде первой модельной кривой;
- в произвольный момент времени принимают пользовательский сигнал от устройства пользователя на втором (AP2) и третьем (AP1) устройствах и ассоциируют время приема, измеряемое соответствующими вторыми и третьими часами (321, 311) местного времени второго и третьего устройств, с пользовательским сигналом при приеме его, что приводит к парам пользовательских значений часов местного времени второго (AP2) и третьего (AP1) устройств;
- вычисляют опорную разность времен прихода (RTDOA) для сигнала от первого устройства (AP4), принимаемого на втором (AP2) и третьем (AP1) устройствах, исходя из фиксированного относительного положения, на основании соответствующего расстояния между первым (AP4) и вторым (AP2) устройствами и первым (AP4) и третьим (AP1) устройствами и известной скоростью прохождения сигнала;
- вычисляют разность пользовательских времен прихода (UTDOA) на основании пары пользовательских значений;
- в произвольный момент времени определяют значение из первой модельной кривой и на основании этого значения вычисляют разности определяемых времен прихода (DTDOA);
- устанавливают отношение опорной разности времен прихода (RTDOA) к разности определяемых времен прихода (DTDOA), чтобы определить текущий корректирующий коэффициент; и
- используют для согласования по времени текущий корректирующий коэффициент, чтобы корректировать разность пользовательских времен прихода (UTDOA).
2. Способ по п.1, в котором передают больше двух сигналов; и в котором соответствующую модельную кривую моделируют для всех сигналов.
3. Способ по п.1, в котором сигналы передают по воздуху.
4. Способ по п.1, в котором сигнал представляет собой сигнал маяка или сигнал представляет собой сигнал маяка и сигнал представляет собой кадр.
5. Способ по п.4, в котором уникальная идентификация представляет собой номер кадра.
6. Способ по п.4, в котором кадр представляет собой кадр в соответствии со стандартом беспроводной связи (IEEE 802.11).
7. Способ по п.2, в котором моделирование временной функции включает в себя подбор полинома методом наименьших квадратов.
8. Способ по п.1, в котором одинаковое количество сигналов передают до и после произвольного момента времени или по меньшей мере один сигнал передают до произвольного момента времени и по меньшей мере один после него.
9. Способ по п.1, включающий в себя четвертое устройство в фиксированном относительном положении по отношению к устройствам (AP4, AP2, AP1) с первого по третье, и моделирование второй модельной кривой, и вычисление второй разности пользовательских времен прихода (TDOA), касающейся группы из четвертого устройства и второго устройства (AP2) или третьего устройства (AP1).
10. Способ по п.9, предназначенный для определения местоположения устройства пользователя на основании первой и второй разностей пользовательских времен прихода (TDOA).
11. Устройство для согласования по времени, содержащее:
- по меньшей мере первое (AP4), второе (AP2) и третье (AP1) устройства в фиксированном относительном положении; при этом
- первое устройство (AP4) имеет передатчик (620) для передачи последовательности уникальных символов, содержащей по меньшей мере первый и второй сигналы с уникальными идентификациями;
- второе и третье устройства (AP2, AP1) имеют приемник (615) для приема по меньшей мере первого и второго сигналов и соответствующие вторые и третьи часы (321, 311) местного времени второго и третьего устройств для измерения времен приема уникально идентифицированных сигналов в по меньшей мере втором (AP2) и третьем (AP1) устройствах, и процессор (625) для ассоциирования времени приема, измеренного посредством соответствующих вторых и третьих часов (321, 311) местного времени второго и третьего устройств, с соответственно первым и вторым сигналом, прием которого приводит к по меньшей мере двум парам значений часов местного времени второго (AP2) и третьего (AP1) устройств;
- процессор (625) для моделирования на основании пар значений часов местного времени временной функции зависимости вторых и третьих часов местного времени на протяжении времени в виде первой модельной кривой;
- второе (AP2) и третье (AP1) устройства дополнительно выполнены с возможностью приема в произвольный момент времени пользовательского сигнала от устройства пользователя на втором (AP2) и третьем (AP1) устройствах и ассоциирования времени приема, измеряемого соответствующими вторыми и третьими часами (321, 311) местного времени второго и третьего устройств, с пользовательским сигналом при его приеме, что приводит к паре пользовательских значений часов локального времени второго (AP2) и третьего (AP1) устройств;
- процессор (625), приспособленный для вычисления опорной разности времен прихода (RTDOA) для сигнала от первого устройства (AP4), принимаемого на втором (AP2) и третьем (AP1) устройствах, исходя из фиксированного относительного положения, на основании соответствующего расстояния между первым (AP4) и вторым (AP2) устройствами и первым (AP4) и третьим (AP1) устройствами и известной скорости прохождения сигнала; и для вычисления разности пользовательских времен прихода (UTDOA) из пары пользовательских значений; при этом
- процессор (625) дополнительно приспособлен для определения в произвольный момент времени значения из первой модельной кривой и на основании этого значения для вычисления разности определяемых времен прихода (DTDOA);
- в которой процессор (625) дополнительно приспособлен для установления отношения разности времен начала прихода и разности определяемых времен прихода для определения текущего корректирующего коэффициента; и
- для согласования по времени, чтобы текущий корректирующий коэффициент использовался для коррекции разности пользовательских времен прихода.
12. Устройство по п.11, содержащее сервер (380), снабженный процессором (625) для выполнения вычислений и моделирования, подключенный к устройствам (AP1, AP2, AP4).
13. Устройство для согласования по времени, содержащее:
- по меньшей мере первое (AP4), второе (AP2) и третье (AP1) устройства в фиксированном относительном положении; при этом
- первое устройство (AP4) имеет передающее средство для передачи последовательности уникальных сигналов, содержащей по меньшей мере первый и второй сигналы с уникальной идентификацией;
- второе и третье устройства (AP2, AP1) имеют приемное средство и часы для приема по меньшей мере первого и второго сигналов, соответствующие вторые и третьи часы (321, 311) местного времени второго и третьего устройств для измерения времен приема уникально идентифицированных сигналов в по меньшей мере втором (АР2) и третьем (AP1) устройствах, и обрабатывающее средство для ассоциирования времени приема, измеренного посредством соответствующих вторых и третьих часов (321, 311) местного времени второго и третьего устройств, с соответственно первым и вторым сигналом после его приема, что приводит к по меньшей мере двум парам значений часов местного времени второго (AP2) и третьего (AP1) устройств;
- моделирующее средство для моделирования на основании пар значений часов местного времени временной функции зависимости значений вторых и третьих часов местного времени на протяжении времени в виде первой модельной кривой;
- второе (AP2) и третье (AP1) устройства дополнительно выполнены с возможностью приема в произвольный момент времени пользовательского сигнала от устройства пользователя на втором (AP2) и третьем (AP1) устройствах и ассоциирования времени приема, измеряемого соответствующими вторыми и третьими часами (321, 311) местного времени второго и третьего устройств, с пользовательским сигналом при его приеме, что приводит к паре пользовательских значений часов местного времени второго (AP2) и третьего (AP1) устройств,
- обрабатывающее средство (380) для вычисления опорной разности времен прихода (RTDOA) сигнала от первого устройства (AP4), принимаемого на втором (AP2) и третьем (AP1) устройствах, исходя из фиксированного относительного положения, на основании соответствующего расстояния между первым (AP4) и вторым (AP2) устройствами и первым (AP4) и третьим (AP1) устройствами и известной скорости прохождения сигнала; и для вычисления разности пользовательских времен прихода (UTDOA) на основании пары пользовательских значений;
- средство для определения в произвольный момент времени значения из первой модельной кривой и на основании этого значения вычисления разности определяемых времен прихода (DTDOA);
- при этом обрабатывающее средство (380) выполнено с возможностью установления отношения опорной разности времен прихода (RTDOA) и разности определяемых времен прихода (DTDOA) для определения текущего корректирующего коэффициента; и
- для согласования по времени, чтобы текущий корректирующий коэффициент использовался для коррекции разности пользовательских времен прихода (UTDOA).
14. Устройство по п.13, в котором обрабатывающее средство (380) включает в себя сервер, соединенный с устройствами (AP1, AP2, AP4), для выполнения вычислений и моделирования.
15. Носитель (500) данных, на котором сохраняется программный код, который при считывании и выполнении компьютером выполняет способ по п.1 в виде этапов процесса.
| US 2007176749 A1, 02.08.2007 | |||
| US 2004046693 A1, 11.03.2004 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ УДАЛЕННОГО УСТРОЙСТВА | 2004 |
|
RU2357267C2 |
| US 6275705 B1, 14.08.2001 | |||
| WO 9642020 A2, 27.12.1996. | |||

