Изобретение относится к устройствам траекторной обработки радиолокационной информации и может быть использовано в РЛС и в автоматизированных системах управления (АСУ) радиолокационных подразделений.
Задачу определения времени окончания активного участка траектории (АУТ) необходимо решать для того, чтобы не допустить появления методических ошибок определения параметров баллистической траектории. В частности, координаты точки падения ракет малой и средней дальности полета могут определяться с недолетом или перелетом от нескольких десятков до нескольких сотен километров.
В качестве примера рассмотрим траекторию ракеты малой дальности типа «Скад». Параметры этой траектории (время от момента пуска t, дальность r, угол места ε, высота z, горизонтальная координата y и модуль скорости V) приведены в таблице 1. Активный участок траектории заканчивается на 65-й секунде полета ракеты.
Координаты ракеты измеряются в РЛС дециметрового диапазона волн (РЛС ДДВ) «Гамма-ДЕ» и в РЛС метрового диапазона (РЛС МДВ) «Небо-СВУ». Период обзора Т0=5 с, точность измерения дальности σr=60-100 м, угла места в «Небо-СВУ» σε=90 мин, в «Гамма-ДЕ» σε=15 мин. РЛС находятся в точке падения ракеты. (Вооружение ПВО и РЭС России. Альманах. - М.: Издательство НО «Лига содействия оборонным предприятиям», 2011. - С.326-327, 334-335).
Оценка модуля скорости, то есть вычисление его численных значений, производилась по выборкам типа «скользящего окна» из пяти измерений декартовых координат:
где оценки скорости изменения высоты и горизонтальной координаты вычислялись по формулам:

весовой коэффициент оценки скорости в конце интервала наблюдения;
Т0 - период обзора РЛС (Кузьмин С.З. Цифровая обработка радиолокационной информации. - М.: «Радио и связь», 1967, С.305-306).
Результаты расчетов, приведенные в таблице 2, показали, что модуль скорости и составляющие вектора скорости определяются с методическими ошибками, если в выборке имеются измерения, произведенные на АУТ, то при включенном ракетном двигателе. Ошибки устраняются, если в выборке отсутствуют измерения, произведенные на АУТ, и она состоит только из измерений, произведенных после выключения двигателя, то есть на пассивном участке траектории (ПУТ). В приведенном примере методические ошибки устраняются через 15 секунд после окончания АУТ. При увеличении длительности «скользящего окна» (объема выборки) будет соответственно увеличиваться время появления методических ошибок после окончания АУТ. При этом значения оценок скорости ракеты в точках, находящихся на АУТ, меньше истинных значений, а в точках, находящихся на ПУТ, больше истинных значений скорости. По этой причине дальность до точки падения, вычисленная по формуле 
Примечание: в скобках приведены разность между оценкой модуля скорости на АУТ и значением максимальной скорости (Vмакс=1528 м/с) в конце АУТ.
В приведенном примере при измерении скорости ракеты за 5 секунд до окончания АУТ, то есть на 60-й секунде полета, координаты точки падения будут определяться с недолетом около 65-ти км. Если измерять скорость через 5 секунд после выключения двигателя, то перелет будет равен 45-ти км.
Таким образом, для исключения появления методических ошибок определение (оценивание) начальных параметров движения ракеты должно производиться после выключения ракетного двигателя, то есть в точке, находящейся на пассивном участке траектории, а измерения координат ракеты, произведенные до выключения ракетного двигателя, то есть на АУТ, не должны использоваться. Поэтому выборки значений измеренных координат, по которым вычисляются параметры движения ракеты (модуль скорости, угол наклона траектории к горизонту, курс и три координаты), должны формироваться после определения времени окончания АУТ.
Известны способы определения времени окончания АУТ средствами разведки инфракрасного и оптического диапазона по факелу ракетного двигателя (Колгашкин Ю.Г. Комплексы самолетного базирования для обнаружения стартующих БР средней и малой дальности./ Международная конференция по проблемам глобальной защиты от баллистических ракет. - М.: МАК «Вымпел» 1993. С.126-128).
Из радиолокационных способов аналогами заявляемому способу являются способы обнаружения времени окончания маневра путем сравнения оценок ускорения декартовых координат со среднеквадратической ошибкой (СКО) этих оценок (Кузьмин С.З. Цифровая обработка радиолокационной информации. - М.: «Радио и связь», 1967, С.310-311). Это связано с тем, что на АУТ ракета совершает маневр большой интенсивности. Вначале ракета движется вертикально вверх. Затем, на участке выведения, ракета движется по дуге и угол наклона траектории изменяется от 90° до расчетного значения для заданной дальности полета. Двигатель выключается, когда скорость достигнет заданной величины. Поэтому на АУТ вертикальная и продольная составляющие ускорения являются переменными величинами, значения которых зависят от силы тяги двигателя и в несколько раз больше ускорения силы тяжести. На ПУТ ракета становится неманеврирующей целью, так как летит по баллистической кривой с постоянным вертикальным ускорением, равным ускорению силы тяжести. Продольные составляющие ускорения примерно равны нулю, так как величина горизонтальных составляющих вектора скорости практически не изменяется (Жаков А.М., Пигулевский Ф.А. Управление баллистическими ракетами. - М.: «Военное издательство», 1965, С.10-11). Таким образом, устройства, реализующие способы определения времени окончания АУТ, и устройства, реализующие способы обнаружения маневра, должны решать одинаковую задачу - обнаружение факта изменения характера движения ракеты.
Наиболее близким по своей сущности к заявляемому способу, то есть прототипом, является радиолокационный способ обнаружения времени окончания маневра ракеты путем сравнения оценки вертикального ускорения 

если 
если 
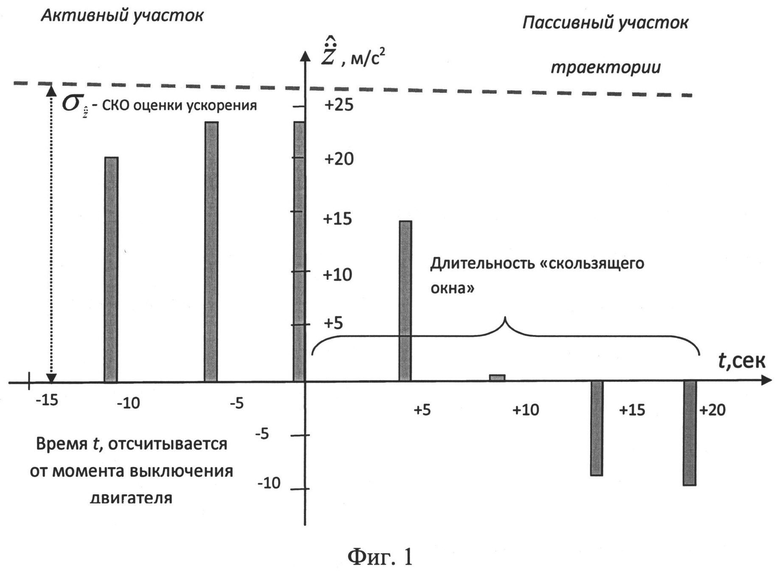
В качестве примера в таблице 3 и на графике фиг.1 приведены значения оценок вертикального ускорения ракеты, рассчитанные по выборкам типа «скользящего окна» из 5-ти измерений высоты, произведенных в PЛC МДВ «Небо-СВУ» и в РЛС ДДВ «Гамма-ДЕ». В качестве исходных данных использовались данные таблицы 1. За начало отсчета времени принят момент окончания АУТ на 65-й секунде полета ракеты.
Значения оценок вертикального ускорения и величина порога, то есть среднеквадратическая ошибка ускорения, вычисляются по формулам (Кузьмин С.З. Цифровая обработка радиолокационной информации. - М.: «Радио и связь», 1967, С.306-308):

где 
zi=risinεi - измеренные значения высоты на интервале наблюдения;
ri, εi - измеренные значения дальности до ракеты и ее угла места;
σε - среднеквадратическая ошибка измерения угла места;
T0 - период обзора РЛС;
n - число измерений в выборке (длительность «скользящего окна»).
Следует отметить, что ошибки определения высоты и, следовательно, вертикального ускорения, практически не зависят от ошибок измерения дальности, а зависят от ошибок измерения угла места.
Как видно из данных таблицы 3 и графика фиг.1, оценки вертикального ускорения на АУТ больше нуля (положительны), так как вертикальная скорость увеличивается из-за действия силы тяги двигателя. На ПУТ вертикальная скорость уменьшается из-за действия силы притяжения Земли, а вертикальное ускорение меньше нуля и равно ускорению силы тяжести. Но даже при относительно высокоточных измерениях угла места в РЛС ДДВ «Гамма-ДЕ» значения оценок вертикального ускорения
Таким образом, основным недостатком прототипа являются высокие требования к точности измерения угла места. Поэтому в РЛС МДВ, либо в других РЛС, размеры антенны которых соизмеримы с длиной волны, использовать данный способ практически невозможно. В мобильных РЛС сантиметрового и дециметрового диапазонов волн также сложно уменьшить ошибки измерения угла места до нескольких минут.
Техническим результатом настоящего изобретения является разработка нового способа, при котором повышена чувствительность устройств определения времени окончания АУТ за счет исключения измерений угла места из обрабатываемых выборок. Для получения желаемого результата предлагается использовать новый параметр траектории - оценку ускорения по квадрату дальности, которую вычисляют путем оптимального взвешенного суммирования значений квадратов дальности до ракеты. Значения оценок ускорения
по квадрату дальности 

если 
если 
Значения оценок ускорения по квадрату дальности и СКО оценок вычисляются так же, как в прототипе:

где ri - измеренные значения дальности;
σr - среднеквадратическая ошибка измерения дальности.
Как видно из формулы (3), измерения угла места не используются. В отличие от прототипа, величина СКО оценки зависит только от ошибок измерения дальности. Ошибки измерения дальности не зависят от размеров антенны и могут быть уменьшены до нескольких десятков метров.
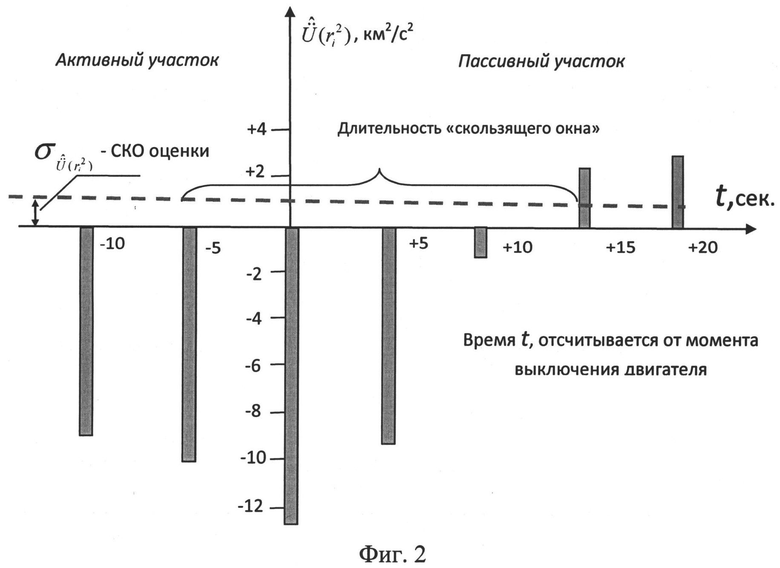
В качестве примера в таблице 4 и на графике фиг.2 приведены значения оценок ускорения
км2/с2
км2/с2
Как видно из данных таблицы 4, значения оценок ускорения
Принцип работы устройства определения времени окончания АУТ заявляемым способом по выборке из трех значений квадратов дальности поясняется схемой, приведенной на фиг.3. В состав устройства входят блок вычисления квадрата дальности 1, блок оценивания второго приращения квадрата дальности 2, блок деления оценки второго приращения на период обзора в квадрате 3, пороговое устройство 4 и блок вычисления среднеквадратической ошибки оценки ускорения по квадрату дальности 5.
На вход блока 1 устройства подаются через равные промежутки времени, равные периоду обзора РЛС, данные измерений дальности, где вычисляются квадраты дальности. Значение квадрата дальности в текущем обзоре подается на вход первой линии задержки блока 2 оценивания второго приращения, а также умножается на весовой коэффициент и подается на вход сумматора. Значения квадратов дальности, полученные в двух предыдущих обзорах после задержки на время, равное одному и двум периодам обзора (Т0 и 2Т0), умножаются на свои весовые коэффициенты и одновременно с текущим взвешенным значением квадрата дальности поступают на вход сумматора. Таким образом, на входе сумматора формируется фиксированная выборка типа «скользящего окна» из трех значений квадратов дальности. Подобная схема для оптимального оценивания параметров приведена на 303-й странице упомянутой монографии Кузьмина С.З. «Цифровая обработка радиолокационной информации». Для увеличения числа измерений в «скользящем окне» необходимо увеличить число линий задержки, умножителей и т.д. При реализации способа на цифровой вычислительной машине (ЦВМ) вычисление и запоминание значений квадратов дальности производится в оперативном запоминающем устройстве, весовые коэффициенты хранятся в долговременном запоминающем устройстве, а операция суммирования производится в арифметическом устройстве.
Сигнал с выхода сумматора поступает на вход делителя 3, где производится деление на период обзора в квадрате, в результате чего получается оценка ускорения по квадрату дальности. Полученная оценка подается на пороговое устройство 4, где сравнивается с величиной среднеквадратической ошибки этого ускорения, вычисленной в блоке 5 по данным измерений дальности ri.
При превышении оценки
Заявляемое изобретение соответствует условиям новизны и изобретательского уровня, так как, в отличие от аналогов, для выявления времени окончания АУТ определяется ускорение по квадрату дальности, а не ускорения по декартовым координатам. Промышленная применимость заявляемого изобретения подтверждается возможностью выявления времени окончания АУТ с помощью серийных РЛС типа «Небо-СВУ», «Гамма-Д» и других станций, измеряющих дальность с ошибками около 100 м.
Использование предлагаемого способа радиолокационного определения времени окончания активного участка позволит устранить методические ошибки определения параметров движения ракеты, экстраполяции баллистической траектории и прогноза точки падения ракеты за счет исключения измерений дальности, азимута, угла места, радиальной скорости, произведенных на активном участке, из состава обрабатываемых выборок.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ВРЕМЕНИ ОКОНЧАНИЯ АКТИВНОГО УЧАСТКА БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ | 2012 |
|
RU2509319C1 |
| ОБНАРУЖИТЕЛЬ МАНЕВРА БАЛЛИСТИЧЕСКОЙ РАКЕТЫ ПО ФИКСИРОВАННОЙ ВЫБОРКЕ КВАДРАТОВ ДАЛЬНОСТИ | 2016 |
|
RU2615783C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ НЕМАНЕВРИРУЮЩЕЙ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ ПО ФИКСИРОВАННОЙ ВЫБОРКЕ КВАДРАТОВ ДАЛЬНОСТИ | 2016 |
|
RU2626015C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОМЕНТА ОКОНЧАНИЯ АКТИВНОГО УЧАСТКА БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ ПО ВЫБОРКАМ КВАДРАТОВ ДАЛЬНОСТИ | 2020 |
|
RU2752265C1 |
| ОБНАРУЖИТЕЛЬ МАНЕВРА БАЛЛИСТИЧЕСКОЙ РАКЕТЫ ПО ФИКСИРОВАННОЙ ВЫБОРКЕ ПРОИЗВЕДЕНИЙ ДАЛЬНОСТИ НА РАДИАЛЬНУЮ СКОРОСТЬ | 2016 |
|
RU2635657C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ МАНЕВРА БАЛЛИСТИЧЕСКОЙ ЦЕЛИ НА ПАССИВНОМ УЧАСТКЕ ТРАЕКТОРИИ | 2013 |
|
RU2524208C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ МАНЕВРА БАЛЛИСТИЧЕСКОГО ОБЪЕКТА ПО ВЫБОРКАМ КВАДРАТОВ ДАЛЬНОСТИ | 2015 |
|
RU2615784C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАНЕВРА БАЛЛИСТИЧЕСКОГО ОБЪЕКТА ПО ВЫБОРКАМ ПРОИЗВЕДЕНИЙ ДАЛЬНОСТИ НА РАДИАЛЬНУЮ СКОРОСТЬ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2632476C2 |
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ РАДИАЛЬНОЙ СКОРОСТИ | 2022 |
|
RU2793774C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2540323C1 |
Изобретение относится к устройствам траекторной обработки радиолокационной информации. Достигаемый технический результат изобретения - повышение чувствительности устройств определения времени окончания активного участка (АУТ) баллистической траектории за счет исключения измерений угла места из обрабатываемых выборок. Для этого на вход устройства определения времени окончания АУТ подают данные измерений дальности ракеты через одинаковые интервалы времени, равные периоду обзора РЛС, вычисляют квадраты значений дальности, формируют фиксированную выборку значений квадратов дальности типа «скользящего окна», находят оценку второго приращения квадрата дальности путем оптимального взвешенного суммирования выборки значений квадратов дальности, делят эту оценку на период обзора радиолокационной станции во второй степени и получают значение оценки ускорения по квадрату дальности, вычисляют среднеквадратическую ошибку оценки, в каждом новом положении «скользящего окна» сравнивают оценку ускорения по квадрату дальности со среднеквадратической ошибкой оценки. Решение об окончании активного участка принимают в момент времени, когда значение оценки ускорения по квадрату дальности становится больше величины среднеквадратической ошибки оценки. 3 ил., 4 табл.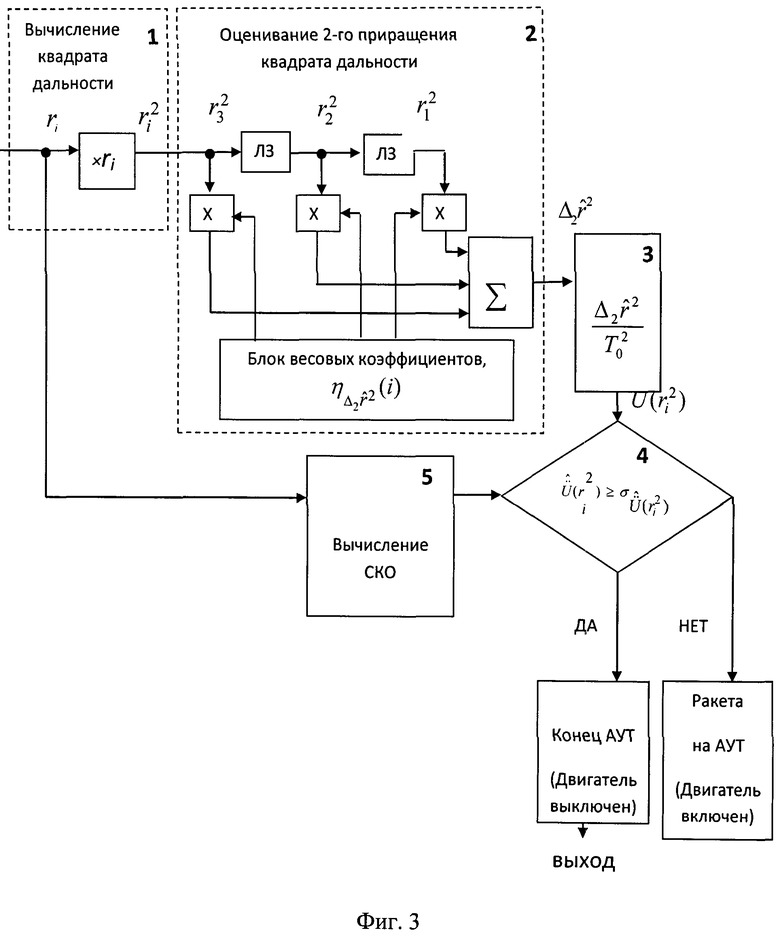
Способ радиолокационного определения времени окончания активного участка баллистической траектории, заключающийся в том, что производят преобразование измеренной дальности баллистической ракеты, формируют фиксированную выборку типа «скользящего окна» значений преобразованной координаты, находят оценку ускорения преобразованной координаты и вычисляют ее среднеквадратическую ошибку, решение о времени окончания активного участка принимают по результатам сравнения полученной оценки в каждом новом положении «скользящего окна» с порогом, равным среднеквадратической ошибке оценки, отличающийся тем, что при преобразовании координаты вычисляют квадраты измеренных значений дальности, формируют фиксированную выборку квадратов дальности, оценку ускорения по квадрату дальности находят путем оптимального взвешенного суммирования выборки значений квадратов дальности, а решение об окончании активного участка траектории принимают в момент времени, когда значение оценки ускорения по квадрату дальности становится больше величины среднеквадратической ошибки оценки ускорения.
| КУЗЬМИН С.З | |||
| Цифровая обработка радиолокационной информации | |||
| Москва, «Радио и связь», 1967, с | |||
| Телефонно-осведомительный аппарат | 1921 |
|
SU306A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ВРЕМЕНИ КОРРЕКЦИИ ОТДЕЛЕНИЯ ГОЛОВНОЙ ЧАСТИ РАКЕТЫ | 2007 |
|
RU2362965C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2009 |
|
RU2429439C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ВРЕМЕНИ КОРРЕКЦИИ ВСКРЫТИЯ ИЛИ ОТДЕЛЕНИЯ ГОЛОВНОЙ ЧАСТИ РАКЕТЫ | 2001 |
|
RU2180955C1 |
| УСОВЕРШЕНСТВОВАННАЯ КОНСТРУКЦИЯ СПОРТИВНОЙ КЛЮШКИ | 2008 |
|
RU2472559C2 |
| US 20120200451 A1, 09.08.2012 | |||
| EP 1925948 B1, 27.04.2011 | |||

