Изобретение относится к медицине, в частности к ортопедической стоматологии.
В ортопедической стоматологии последние несколько десятков лет для повышения точности диагностики пациентов и изготовления ортопедических конструкций используются артикуляторы (фиг.1).
Эти приборы предназначены для мануального воспроизведения начальных траекторий артикуляции нижней челюсти. На верхней раме артикулятора крепится гипсовая модель верхней челюсти пациента, путем мануального смещения верхней подвижной рамы, воспроизводятся примерные движения нижней челюсти.
Артикуляторы возможно использовать по среднеустановленным характеристикам суставных и резцовых механизмов, т.е. все мануально воспроизводимые движения гипсовых моделей челюстей будут воспроизведены по средним данным.
Так, например, известен артикулятор (устройство для закрепления моделей челюстей), содержащий верхнюю и нижнюю рамы, шарнирно соединенные между собой, и средство для фиксации моделей верхней и нижней челюстей, которое снабжено дополнительным фиксатором (RU 2253407, RU 2270635).
Также артикулятор возможно настроить по индивидуальным числовым данным с помощью механической или электронной аксиографии (Рощин Е.М. «Применение электронного аксиографа…», www.dentaguard.ru).
Однако у механических артикуляторов существуют некоторые погрешности. Эти погрешности связаны с невозможностью точного воспроизведения траекторий движений нижней челюсти. В любых артикуляторах имеются специальные вставки, направляющие, по которым двигается верхняя рама артикулятора, они имеют стандартное усредненное строение. В артикуляторах возможно изменять угол наклона этих вставок. У каждого пациента нижняя челюсть двигается по костным направляющим, при этом для каждого пациента они имеют свое индивидуальное строение.
Таким образом, в большинстве случаев невозможно точно воспроизвести траектории движения нижней челюсти.
Настоящее изобретение направлено на достижение технического результата, заключающегося в повышении уровня индивидуализации моделирования ортопедических конструкций, тем самым значительно уменьшается погрешность при изготовлении ортопедических лечебных конструкций.
Указанный технический результат достигается тем, что устройство для автоматического воспроизведения в пространстве траекторий движения нижней челюсти человека по заранее заданным траекториям состоит из корпуса для установки устройства на поверхность и размещения магнитного крепления модельных слепков верхней и нижней челюстей в межрамочном пространстве, подвижной платформы, которая соединена с элементом корпуса, к которому крепится магнитным креплением нижняя челюсть, модуля управления и пользовательского графического интерфейса на базе персонального компьютера для автоматического и дистанционного ручного управления движением подвижной платформой, модуля согласования интерфейса управления для трансляции протоколов электронной аксиографии и согласования параметров интерфейсов персонального компьютера и модуля электронного управления, модуля сервопривода, служащего для приведения в движение подвижной платформы.
Указанный технический результат достигается тем, что способ моделирования индивидуальной ортопедической конструкции включает перенос гипсовых моделей верхней и нижней челюстей в межрамочное расстояние (пространство) на магнитных пластинах в привычном смыкании зубов человека.
Указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого технического результата.
Настоящее изобретение иллюстрируется чертежами.
Фиг.1 - артикулятор Protar 9. Фирма Kavo.
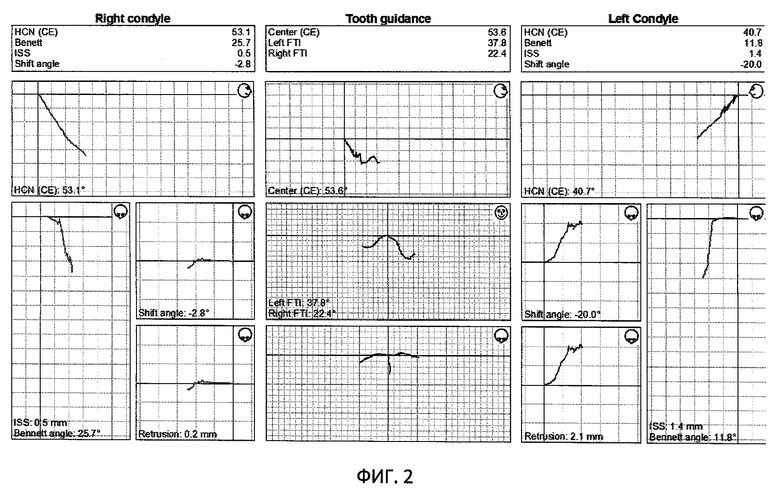
Фиг.2 - протокол обследования.
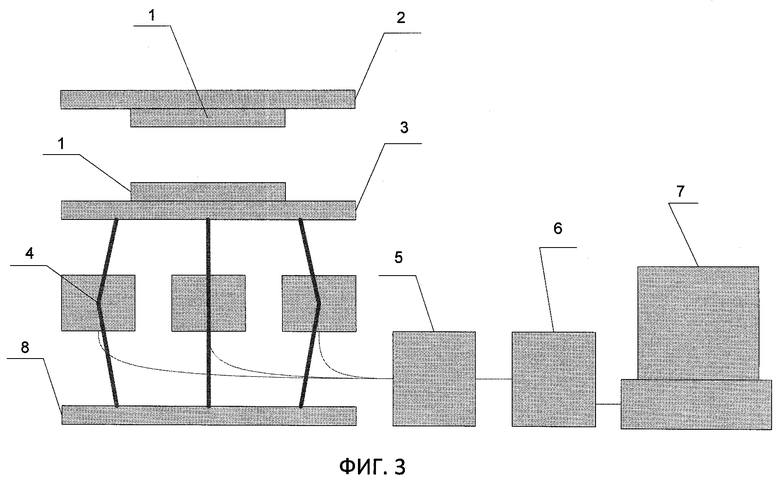
Фиг.3 - устройство, состоящее из модулей.
Фиг.4- общий вид, пример исполнения устройства моделирования индивидуальной ортопедической конструкции.
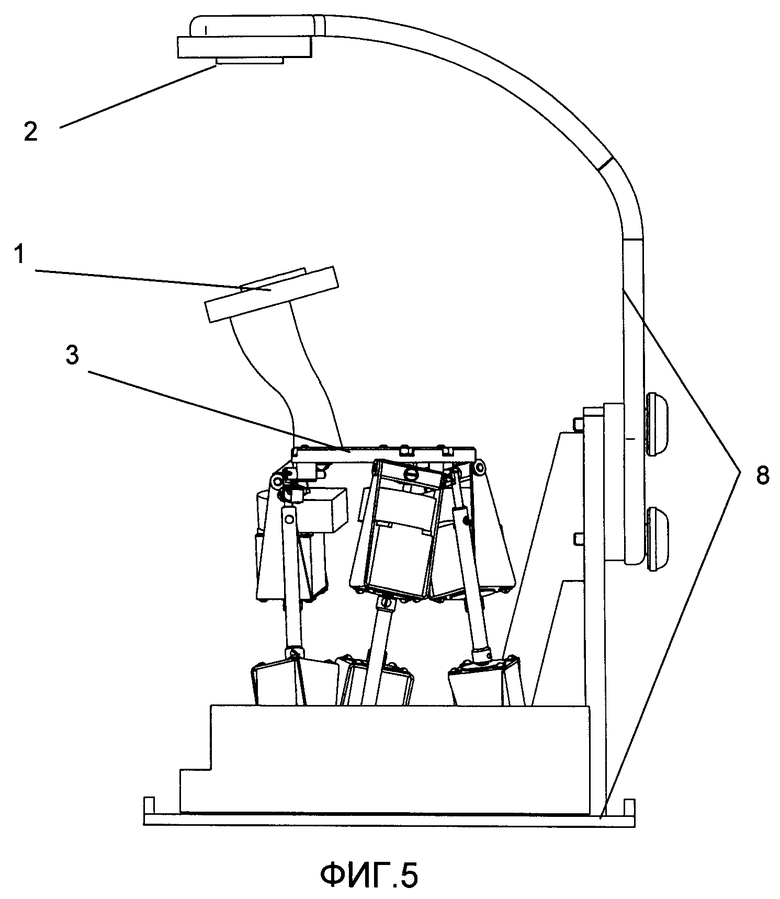
Фиг.5 - вид сбоку, пример исполнения устройства моделирования индивидуальной ортопедической конструкции.
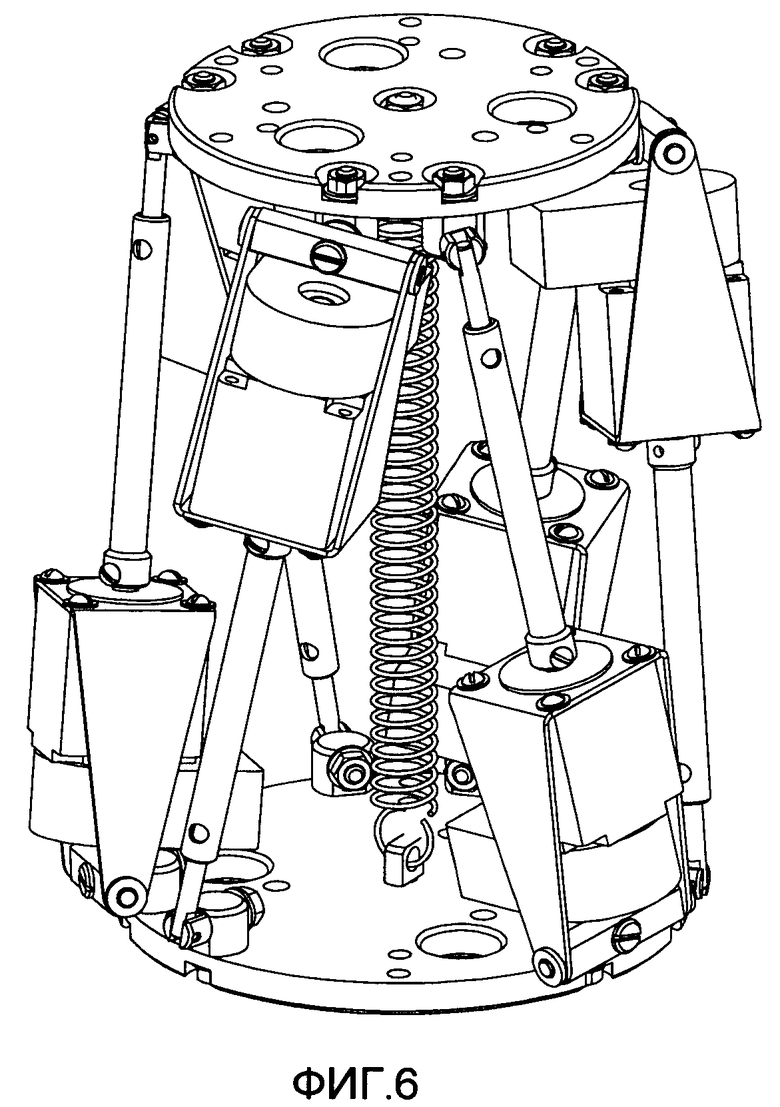
Фиг.6 - общий вид подвижной платформы для перемещения в пространстве по шести координатам свободы.
Изобретение относится к устройству «индивидуальный электронный артикулятор», которое предназначено для автоматического воспроизведения в пространстве траекторий движения нижней челюсти человека по заранее заданным траекториям или в режиме дистанционного ручного управления.
Для настройки механического артикулятора по индивидуальным параметрам проводят электронную аксиографию (Фиг.2).
Аксиография предназначена для регистрации траекторий движения нижней челюсти. Зарегистрировав траектории движения, электронный аксиограф выдает числовые данные для настройки механического артикулятора.
Однако зарегистрированные траектории движения нижней челюсти воспроизвести мануально очень сложно.
С помощью разработанного устройства (Фиг.3, 4, 5) появилась возможность воспроизводить зарегистрированные траектории движения нижней челюсти.
Устройство состоит из модулей управления (7) и пользовательского графического интерфейса (7) на базе персонального компьютера (7), модуля согласования интерфейса управления (6), электронного модуля управления (5), встраиваемого блока питания (5), модуля сервопривода (4), корпуса (8), подвижной платформы (3) магнитного крепления модельных слепков челюстей человека (1).
Магнитные крепления гипсовых моделей челюстей человека (1) служат для надежной фиксации слепков челюстей человека на подвижной платформе устройства. При этом гипсовые модели верхней и нижней челюстей переносятся в межрамочное расстояние на магнитных пластинах в привычном смыкании зубов человека.
Элементы корпуса (8) служат для установки устройства на поверхность и размещения магнитного крепления (2) модельных слепков верхней челюсти человека.
Подвижная платформа (3) служит для перемещения в пространстве по шести координатам свободы гипсовой модели нижней челюсти человека, закрепленной на магнитном креплении платформе (1), размещенном на платформе (3). Модуль сервопривода (4) служит для приведения в движение подвижной платформы (3).
В качестве такой платформы может использоваться платформа Гью-Стюарта - разновидность параллельного манипулятора, в которой используется октаэдральная компоновка стоек. Платформа Гью-Стюарта имеет шесть степеней свободы (три поступательных и три вращательных, как абсолютно твердое тело) (см. http://ru.wikipedia.org/wiki/).
Конструкция подвижной платформы для перемещения в пространстве по шести координатам свободы, трем поступательным и трем вращательным, описана в US 3295224 A, опубл. 03.01.1967.
Таким образом, мы сконструировали подвижную платформу, на которой крепится гипсовая модель нижней челюсти совершающая поступательные и вращательные движения по ранее зарегистрированным траекториям с помощью электронной аксиографии.
На Фиг.6 показана конструкция подвижной платформы для перемещения в пространстве по шести координатам свободы, используемая для приведенного варианта осуществления устройства (Фиг.4, 5).
Модули электронного управления (5) и встраиваемого блока питания (5) служат для передачи сигналов управления модулю сервопривода (4) и обеспечения электропитания модуля сервопривода (4).
Модуль согласования интерфейса управления (6) служит для трансляции протоколов электронной аксиографии и согласования параметров интерфейсов персонального компьютера (7) и модуля электронного управления (5).
Персональный компьютер (7), модули управления (7) и пользовательского интерфейса (7) служат для автоматического и дистанционного ручного управления движением подвижной платформы (3).
Принцип действия устройства (Фиг.3, 4).
Подвижная платформа (3) устройства совершает поступательные и вращательные движения в пространстве, воспроизводя ранее записанные траектории движения нижней челюсти с помощью электронной аксиографии за счет действия модуля сервопривода (4), что невозможно в механических устройствах.
Изобретение обеспечивает расширение функциональных возможностей, в частности подстройку под индивидуальные анатомические особенности пациента, в частности угол наклона траектории перемещения височно-нижнечелюстного сустава, а также более точное воспроизведение траектории перемещения за счет автоматизации и электронного управления движения по дополнительным степеням свободы, фиксацию в течение длительного времени заданного положения слепка челюсти, точное циклическое повторение заранее заданных траекторий движения.
С помощью устройства предоставляется возможность моделировать ортопедические лечебные конструкции с учетом привычных движений нижней челюсти человека, таким образом индивидуализируя их. Изготовленные конструкции в данном устройстве не искажают привычные для человека движения нижней челюсти, что невозможно учитывать в механических артикуляторах.
Группа изобретений относится к области медицины, в частности к ортопедической стоматологии, и предназначено для моделирования ортопедических лечебных конструкций с учетом привычных движений нижней челюсти человека. Способ моделирования индивидуальной ортопедической конструкции включает перенос гипсовых моделей верхней и нижней челюстей на магнитных пластинах в привычном смыкании зубов человека в межрамочное пространство устройства, выполненного в виде артикулятора, настройку артикулятора по индивидуальным числовым данным с помощью электронной аксиографии. Подвижная платформа артикулятора служит для перемещения в пространстве по шести координатам свободы гипсовой модели нижней челюсти. Устройство для осуществления способа выполнено в виде артикулятора, состоящего из корпуса для установки устройства на поверхность и размещения магнитного крепления модельных слепков верхней и нижней челюстей в межрамочном пространстве, подвижной платформы, модуля управления и пользовательского графического интерфейса, модуля согласования интерфейса управления и модуля сервопривода. Подвижная платформа предназначена для перемещения в пространстве по шести координатам свободы и соединена с элементом корпуса, к которому крепится магнитным креплением нижняя челюсть. Модуль управления и пользовательского графического интерфейса на базе персонального компьютера предназначен для автоматического и дистанционного ручного управления движением подвижной платформы. Модуль согласования интерфейса управления предназначен для трансляции протоколов электронной аксиографии и согласования параметров интерфейсов персонального компьютера и модуля электронного управления. Модуль сервопривода служит для приведения в движение подвижной платформы.
Технический результат - достижение высокого уровня индивидуализации моделирования ортопедических конструкций, снижая тем самым погрешности при изготовлении ортопедических конструкций. 2 н.п. ф-лы, 6 ил.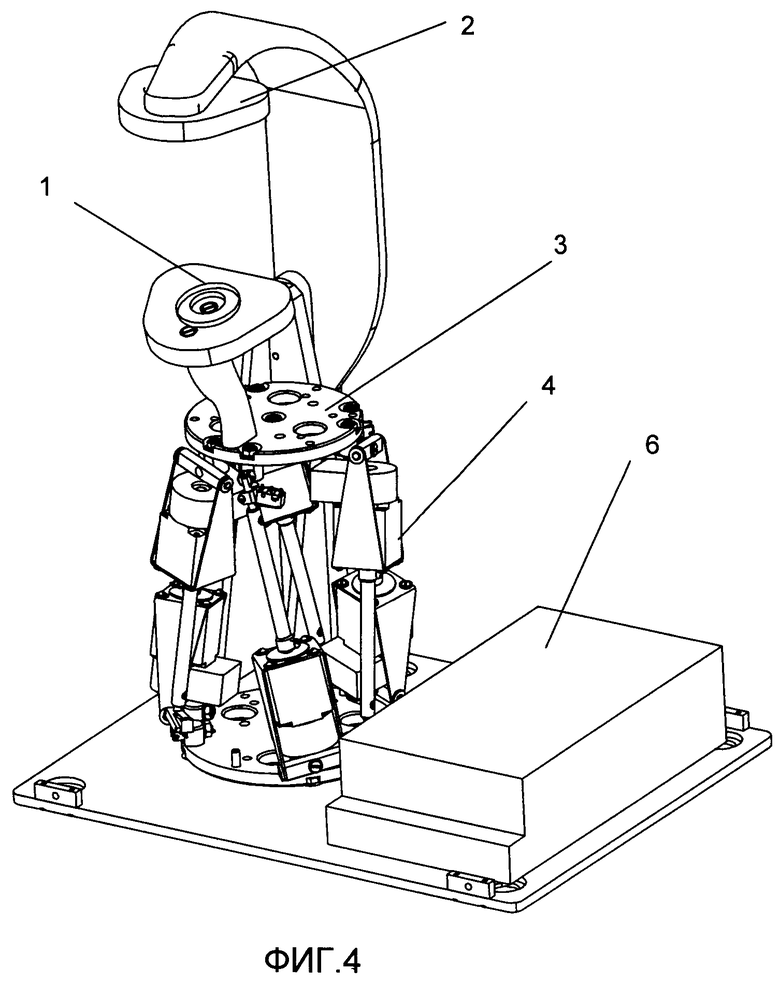
1. Способ моделирования индивидуальной ортопедической конструкции, включающий перенос гипсовых моделей верхней и нижней челюстей на магнитных пластинах в привычном смыкании зубов человека в межрамочное расстояние (пространство) устройства, выполненного в виде артикулятора, настройку артикулятора по индивидуальным числовым данным с помощью электронной аксиографии, при этом подвижная платформа артикулятора служит для перемещения в пространстве по шести координатам свободы гипсовой модели нижней челюсти.
2. Устройство для осуществления способа по п.1, выполненное в виде артикулятора, состоящее из
(а) корпуса для установки устройства на поверхность и размещения магнитного крепления модельных слепков верхней и нижней челюстей в межрамочном пространстве,
(б) подвижной платформы для перемещения в пространстве по шести координатам свободы, соединенной с элементом корпуса, к которому крепится магнитным креплением нижняя челюсть,
(в) модуля управления и пользовательского графического интерфейса на базе персонального компьютера для автоматического и дистанционного ручного управления движением подвижной платформы,
(г) модуля согласования интерфейса управления для трансляции протоколов электронной аксиографии и согласования параметров интерфейсов персонального компьютера и модуля электронного управления,
(д) модуля сервопривода, служащего для приведения в движение подвижной платформы.
| US 5020993 A (LEVANDOSKI RONALD R) 04.06.1991, описание кол.6 строка 58 – кол.8 строка 25, фиг.16-18 | |||
| СПОСОБ УТИЛИЗАЦИИ ФОСФОРОРГАНИЧЕСКИХ ОТРАВЛЯЮЩИХ ВЕЩЕСТВ | 2003 |
|
RU2229913C1 |
| AНТОНИК М.М | |||
| и др | |||
| Применение электронной аксиографии для диагностики мышечно-суставной дисфункции у пациентов с патологией окклюзии, ж | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| US 6062861 (NOBELPHARMA AB) 16.05.2000 | |||
| JP 2004160119 A (SUGANO YASUYUKI) 10.06.2004 | |||

