Изобретение относится в общем к способам моделирования и построения моделей нефтегазовых месторождений. В частности, изобретение относится к способу, устройству и машиночитаемому носителю данных, предназначенных для автоматического выделения поверхностей для построения геолого-гидродинамической модели нефтегазового месторождения по сейсмическим данным.
Уровень техники
Известен способ построения трехмерных геологических структур на основе данных поверхностей (G. Caumon et al., "Surface-Based 3D Modeling of Geological Structures ", 23.09.2009), который описывает тесную интеграцию данных поверхностей при геологическом моделировании. В способе выявляют узлы поверхности границ решетки, которые пересекаются с другими поверхностями. Используют ограничения толщины и диапазон при выполнении интерполирования, чтобы смоделировать поверхности, лежащие на заданном расстоянии друг от друга. Это расстояние вычисляется на векторном поле.
Известен способ геофизической разведки для выявления нефтегазовых объектов (RU 2289829 C1, G01V 11/00, 20.12.2006), который раскрывает оптимизацию размещения глубоких скважин на нефтегазовых объектах по комплексу данных наземной сейсмической, электро-, магнито-, гравиразведки; электрического, радиоактивного, акустического, сейсмического, магнитного, гравитационного каротажа; изучения керна и испытания скважин. По данным акустического, сейсмического, электрического, радиоактивного, магнитного и гравитационного каротажа, лабораторных исследований керна формируют жесткостные, электрические, магнитные и гравиметрические модели целевого интервала геологического разреза в скважинах, рассчитывают геофизические синтетические трассы, по которым проводят СВАН, определяют модельные СВО и их спектрально-временные атрибуты (СВА). Спектрально-временные атрибуты (СВА) представляют собой отношение энергии высоких частот и больших времен к энергии низких частот и малых времен, а также произведения удельной спектральной плотности на средневзвешенные частоту и время либо на максимальные частоту и время энергетических спектров СВАН-колонки по оси частот и времен.
Известны также различные методы построения цифровых геологических моделей нефтегазовых месторождений и проектирование разработки с использованием цифровых геологических моделей, предлагаемых компанией НПЦ «Геонефтегаз» (http://www.geoneftegaz.ru/models/mod.htm). Компания предлагает решение по моделированию цифровой геологической модели, построенной с использованием технологии, позволяющей изучать коллекторские свойства и нефтеносность карбонатных и терригенных пластов в сложнопостроенных резервуарах с тектоническим и литологическим экранированием, что позволяет вести подсчет запасов нефти по промышленным категориям. Данное решение используется для расчета геолого-технологических гидродинамических моделей и оптимизации проектов разработки. Применение данной технологии прогноза коллекторских свойств и нефтеносности позволяет обоснованно строить трехмерные геологические модели при минимальном объеме глубокого бурения. Их вовлечение в процесс расчета и анализа технологических показателей разработки позволит сформировать оптимальные техсхемы и ускорить ввод новых объектов в эксплуатацию. Анализ подтверждаемости прогнозных параметров пласта - эффективной толщины, пористости, типа
флюида с данными бурения новых скважин - свидетельствует об удовлетворительной сходимости результатов.
Известен способ контроля геометрических и гидродинамических параметров гидроразрыва пласта (RU 2390805 C1, G01V 5/12, 27.05.2012), который заключается в том, что перед проведением гидроразрыва пласта на поверхности в квадрате 400×400 м с центром, совпадающим с устьем скважины, проводят определение концентрации радона в шурфах глубиной 50-70 см по сетке с шагом 50 м. По данным поверхностной съемки проводят линии геодинамических зон, которые могут быть связаны со вновь образующимися трещинными системами в пласте в результате гидроразрыва (так как развиваются большие давления). В скважине перед гидроразрывом проводят радоновые индикаторные исследования и определяют ее техническое состояние: заколонные перетоки, если таковые имеются, их направление, долевое распределение по ним закачиваемой жидкости, профиль приемистости коллектора по данным трех временных замеров и проницаемость.
Недостатками известных решений является то, что они не могут гарантировать построения высокоточной модели нефтегазового месторождения на основании только сейсмологических данных.
Раскрытие изобретения
Задачей настоящего изобретения является обеспечение способа, устройства и машиночитаемого носителя данных, предназначенных для выполнения этапов, составляющих существенную часть всей задачи построения геолого-гидродинамической модели, а именно автоматического (т.е. требующего участия пользователя только на этапе ввода начальных данных) построения набора поверхностей, основанного на входных сейсмических данных. Полученные на выходе поверхности можно без дополнительной обработки использовать в построении геолого-гидродинамической решетки. Входными данными для способа являются кубы сейсмических атрибутов Р, Q; сейсмический куб (опционально).
Техническим результатом является повышение точности построения геолого-гидродинамической модели нефтегазового месторождения.
В одном варианте осуществления изобретения способ включает в себя этапы на которых: 1) определяют решетку модели с заданным шагом и предельно допустимой величиной на координатной сетке; 2) задают управляющие параметры поверхностей относительно шага решетки; 3) определяют набор поверхностей решетки относительно ее шага; 4) определяют область, в которой определена поверхность, и добавляют узлы решетки, в которых поверхность не определена; 5) задают параметры кубов сейсмических атрибутов - p, q, задают координаты вновь добавленного узла - X, Y, задают координаты соседнего узла - х, у, в котором поверхность определена, и задают параметр глубины поверхности в этом узле - z( x, y); 6) упорядочивают глубины поверхностей в указанном узле решетки по возрастанию и назначают глубину i-й поверхности в этом узле равной i-й по порядку глубине; 7) определяют поверхности для обработки; 8) определяют функционалы и градиенты поверхностей для обработки; 9) определяют величину текущего шага смещения вдоль градиента; 10) определяют для каждой обрабатываемой поверхности с помощью величины шага смещения градиента, для какого по счету шага достигается минимальное значение функционала; причем 11) когда для каждой обрабатываемой поверхности минимальное значение функционала меньше шага смещения градиента, то производят смещение вдоль градиента на найденное количество шагов; 12) сохраняют в памяти величину сделанного смещения и определяют максимум сделанных смещений; 13) исключают временно из обработки поверхности, для которых достигнуто уменьшение функционала; 14) определяют поверхности, для которых не удалось уменьшить функционал, и, когда такие поверхности определены, то повторяют этапы 7) - 13); 15), повторно упорядочивают глубины определенных на указанном узле решетки поверхностей по возрастанию и назначают глубину i-й поверхности в этом узле равной i-й по порядку глубине; 16) определяют значения текущих шагов решетки по обновленным данным поверхностей; 17) итеративно повторяют этапы 3-17 способа до тех пор, пока не будет получена модель с заданными на этапах 1 и 2 параметрами.
Во втором варианте настоящее изобретение обеспечивает устройство для выполнения способа по способу, описанному в первом варианте осуществления изобретения, и который, соответственно, дополнительно не описывается. Устройство может представлять собой, но не ограничиваться: суперкомпьютер, персональный компьютер, портативный компьютер, планшетный компьютер, карманный компьютер, смартфон и тому подобное. Устройство обязательно содержит один или более процессоров, которые предназначены для выполнения компьютерных команд или кодов, хранящихся в памяти устройства с целью обеспечения выполнения способов по первому или второму вариантам осуществления настоящего изобретения, машиночитаемый носитель данных (память) и модули ввода/вывода (I/O). Модули I/O представляют собой, но не ограничиваются, типичные и известные из уровня техники средства управления устройством: манипулятор типа «мышь», клавиатура, джойстик, тачпад, трекбол, электронное перо, стилус, сенсорный дисплей и тому подобное. Так же модули I/O представляют собой, но не ограничиваются типичные и известные из уровня техники средства демонстрирования информации: монитор, проектор, принтер, графопостроитель и тому подобное. В качестве примера, а не ограничения, машиночитаемый носитель данных может включать в себя оперативную память (RAM); постоянное запоминающее устройство (ROM); электрически стираемое программируемое постоянное запоминающее устройство (EEPROM); флэш-память или другие технологии памяти; CDROM, цифровой универсальный диск (DVD) или другие оптические или голографические носители данных; магнитные кассеты, магнитную пленку, запоминающее устройство на магнитных дисках или другие магнитные запоминающие устройства, несущие волны или другой носитель данных, который может быть использован для кодирования требуемой информации и к которому может быть осуществлен доступ посредством устройства, описанного выше.
В третьем варианте настоящее изобретение обеспечивает машиночитаемый носитель данных, содержащий код программы, который побуждает процессор и/или процессоры выполнять действия по способу, описанному в первом варианте осуществления изобретения, и который, соответственно, дополнительно не описывается. В качестве примера, а не ограничения, машиночитаемый носитель данных может включать в себя оперативную память (RAM); постоянное запоминающее устройство (ROM); электрически стираемое программируемое постоянное запоминающее устройство (EEPROM); флэш-память или другие технологии памяти; CDROM, цифровой универсальный диск (DVD) или другие оптические или голографические носители данных; магнитные кассеты, магнитную пленку, запоминающее устройство на магнитных дисках или другие магнитные запоминающие устройства, несущие волны или другой носитель данных, который может быть использован для кодирования требуемой информации, и к нему может быть осуществлен доступ посредством устройства, описанного во втором варианте осуществления изобретения и, которое, соответственно дополнительно не описывается.
Краткое описание чертежей
Фиг.1 иллюстрирует блок-схему выполнения этапов заявленного способа.
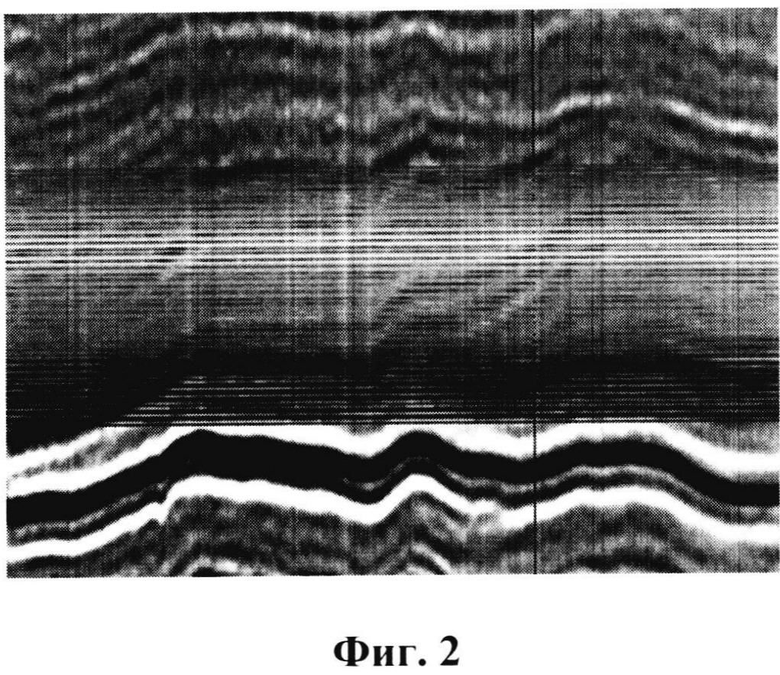
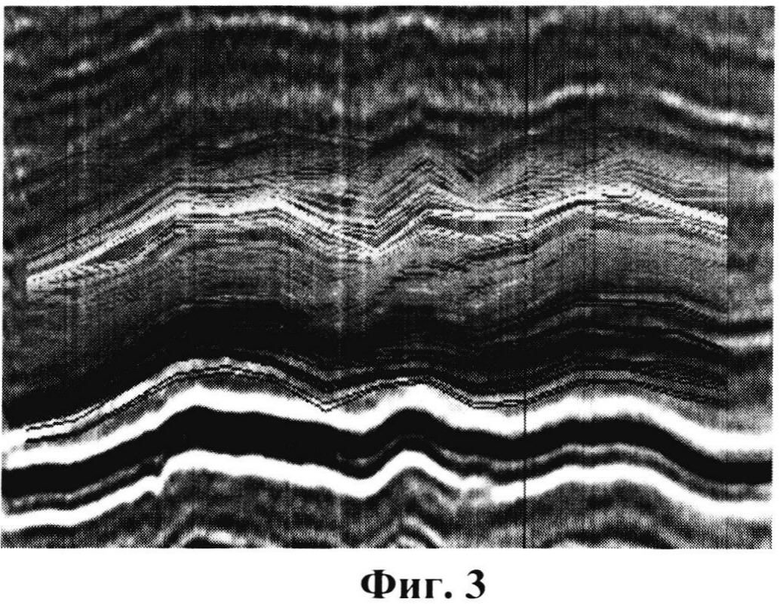
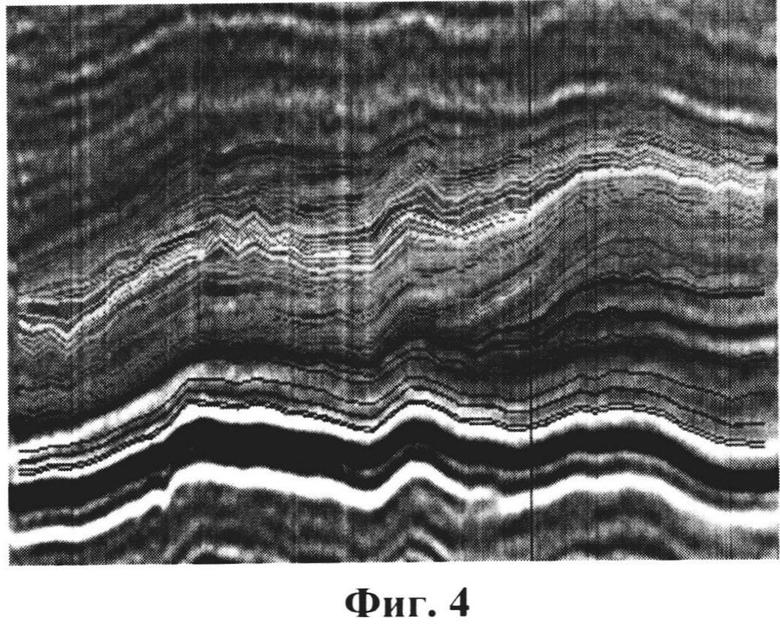
Фиг.2-4 иллюстрируют результаты выполнения итераций способа при построении геолого-гидродинамической модели.
Детальное описание чертежей
Описываемое далее подробное описание чертежей дано только для лучшего раскрытия сущности изобретения и не ограничивает возможные реализации настоящего изобретения.
На фиг.1 изображена блок-схема выполнения этапов заявленного способа, а именно этапы: этап 1, на котором определяют решетку модели с заданным шагом и предельно допустимой величиной на координатной сетке; этап 2, на котором задают управляющие параметры поверхностей относительно шага решетки; этап 3, на котором определяют набор поверхностей решетки относительно ее шага; этап 4, на котором определяют область, в которой определена поверхность и добавляют узлы решетки, в которых поверхность не определена; этап 5, на котором задают параметры кубов сейсмических атрибутов - p, q, задают координаты вновь добавленного узла - X, Y, задают координаты соседнего узла - х, у, в котором поверхность определена, и задают параметр глубины поверхности в этом узле - z(x,y); этап 6, на котором упорядочивают глубины поверхностей в указанном узле решетки по возрастанию и назначают глубину i-й поверхности в этом узле равной i-й по порядку глубине; этап 7, на котором определяют поверхности для обработки; этап 8, на котором определяют функционалы и градиенты поверхностей для обработки; этап 9, на котором определяют величину текущего шага смещения вдоль градиента; этап 10, на котором определяют для каждой обрабатываемой поверхности с помощью величины шага смещения градиента, для какого по счету шага достигается минимальное значение функционала; причем на этапе 11, если для каждой обрабатываемой поверхности минимальное значение функционала меньше шага смещения градиента, то производят смещение вдоль градиента на найденное количество шагов; этап 12, на котором сохраняют в памяти величину сделанного смещения и определяют максимум сделанных смещений; этап 13, на котором исключают временно из обработки поверхности, для которых достигнуто уменьшение функционала; этап 14, на котором определяют поверхности, для которых не удалось уменьшить функционал, и, когда такие поверхности определены, то повторяют этапы 7-13; этап 15, повторно упорядочивают глубины определенных на указанном узле решетки поверхностей по возрастанию и назначают глубину i-й поверхности в этом узле равной i-й по порядку глубине; этап 16, на котором определяют значения текущих шагов решетки по обновленным данным поверхностей; и этап 17, на котором итеративно повторяют этапы 3-17 способа до тех пор, пока не будет получена модель с заданными на этапах 1 и 2 параметрами.
Описываемый здесь способ позволяет для набора поверхностей, выбранных в качестве начального приближения, получить набор поверхностей, который обеспечивает наилучшую согласованность со входными данными - сейсмическими атрибутами Р и Q. Согласованность понимается в следующем смысле. Сейсмические атрибуты Р и Q по своему физическому смыслу в совокупности задают поле плоскостей. Определяется функционал, который измеряет для всех поверхностей набора отличие касательной плоскости в каждой точке поверхности от этого поля. Минимум этого функционала ищется адаптированным к задаче методом наискорейшего градиентного спуска.
Успех реализации способа обеспечивается следующими критериями:
- одновременное (параллельное) выделение и последующее уточнение достаточно большого количества поверхностей;
- семейство функционалов, минимизация которых составляет основу успешного выполнения способа;
- работа способа выглядит как связная цепочка итерационных этапов. Выходные данные каждого этапа после соответствующей перестройки и модификации поступают на вход следующего.
- оптимальный выбор начальных приближений, поступающих на вход итерационных алгоритмов, минимизирующих функционалы.
Корреляцию поверхностей проводят с целью извлечения информации, необходимой для прогноза состава и свойств горных пород. Корреляцией поверхности называют процесс прослеживания от трассы к трассе сейсмического куба фазы волны, соответствующей одной и той же отражающей границе. Другими словами, это процесс прослеживания самих отражающих поверхностей. Поверхности коррелируют по нулевой фазе, отрицательной или положительной.
Настоящий способ предлагает использовать не собственно сейсмический куб, а производные данные, так называемые сейсмические атрибуты Р и Q. Эти атрибуты для каждой точки каждой трассы показывают, под каким углом находится максимально похожая на нее точка соседней трассы. Тем самым можно считать, что эти атрибуты задают поле касательных плоскостей к отражающим поверхностям. А сама задача сводится к построению поверхностей, для которых это поле плоскостей является касательным. Это делается с помощью минимизации функционала. Задается функционал, который измеряет суммарное отличие поля плоскостей, задаваемого Р, Q атрибутами и от касательных плоскостей к поверхностям набора. Метод градиентного спуска позволяет перейти к новому набору поверхностей, для которого функционал имеет меньшее значение, тем самым лучше согласованному с входными данными.
Способ в общем включает в себя этапы, использующиеся в каждой итерации выполнения способа:
1. «Растекание». Решает задачу продолжения поверхности в те области, где он не определен. Используется, в частности, при построении начальных приближений.
2. «Уточнение». Построение интегральной поверхности по полю (касательных) плоскостей, задаваемому Р, Q кубами, на основе минимизации функционала.
3. «Сортировка». Перестройка поверхностей по глубине. Решает задачу исключения пересечений поверхностей.
4. «Подтягивание» к экстремумам (максимумам или минимума). Далее приведено детальное раскрытие выполнения этапов.
Этап «Растекание»
Вход: набор поверхностей. Поверхности определены не на всей решетке, р, q - кубы сейсмических атрибутов.
Выход: набор поверхностей с большей областью определения. Выполнять в цикле:
1. Для каждой поверхности добавить узлы решетки, в которых поверхность не определена, но определена в одном из соседних узлов, к области определения этой поверхности.
2. Если добавить узлы ни для одной поверхности не удалось, выйти из цикла.
3. Для каждого из вновь добавленных узлов: А) Рассчитать значение по формуле:

Здесь p, q - кубы сейсмических атрибутов, X, Y- координаты вновь добавленного узла, x, y - координаты соседнего узла, в котором поверхность определена, a z (x, y) - глубина поверхности в этом узле. Сумма распространяется по всем соседним узлам, в которых поверхность определена.
Б) Проверить, что таким образом расширенная поверхность попадает в требуемую область пространства.
Смысл указанной выше формулы следующий. Для каждого соседнего узла выражение z(x,y)+(X-x)×р(x,y,z)+(Y-y)×q(x,y,z) - это линейное приближение по формуле Тейлора значения в новом узле по значению в соседнем. Эти линейные приближения для всех соседних узлов далее усредняются с весами. Веса при этом обратно пропорциональны расстояниям между добавленным и соседним узлами.
4. Если рассчитать значение ни в одном добавленном узле не удалось, значит поверхность определена в каждом узле решетки.
Этап «Уточнение»
Вход: набор поверхностей - начальное или стартовое приближение, р, q - кубы сейсмических атрибутов.
Выполняется минимизация функционала, который представляет собой сумму квадратичных отклонений частных производных по x, y уравнений, задающих поверхности, от соответственно значений P и Q атрибутов:

Здесь суммирование происходит по всем узлам и всем поверхностям набора.
Минимизация функционала осуществляется методом наискорейшего градиентного спуска, соответствующим образом оптимизированного и адаптированного к ситуации.
Схема этапа:
1. Вычислить, какие поверхности будут обрабатываться: если на предыдущих шагах был сделан слишком маленький шаг, то не будут обрабатываться.
2. Вычислить функционал.
3. Вычислить градиент.
4. Далее в цикле:
5. Вычислить величину текущего шага смещения вдоль градиента.
6. Для каждой обрабатываемой поверхности: пройти этим шагом вдоль градиента и найти для какого по счету шага достигается минимальное значение функционала.
7. Для каждой обрабатываемой поверхности: если найденное минимальное значение функционала меньше входного значения, то сдвинуться вдоль градиента на найденное количество шагов.
8. Запомнить величину сделанного смещения и вычислить максимум сделанных смещений.
9. Исключить временно из обработки эту поверхность, (т.е. те поверхности, для которых достигнуто уменьшение функционала, временно исключаются из обработки).
10. Проверить, для всех ли поверхностей удалось уменьшить функционал. Если для всех, то выйти из цикла и закончить работу алгоритма.
11. Если не для всех, но величина текущего шага смещения достаточно мала, то также происходит выход из цикла.
12. В противном случае переход к началу цикла. (На следующем шаге цикла будут обрабатываться только те поверхности, функционал для которых не удалось уменьшить).
Этап «Сортировка»
В результате этого простого приема, глубины, соответствующие одной поверхности, могут быть присвоены другой. Благодаря этой процедуре, поверхности как бы «подталкивают» друг друга к правильному решению.
Схема:
Цикл по всем узлам:
1. Упорядочить глубины поверхностей в этом узле по возрастанию.
2. Назначить глубину i-й поверхности в этом узле равной i-Pi по порядку глубине.
Этап «Подтягивание»
Простая процедура, в которой каждая точка каждой поверхности в определенной окрестности по глубине перемещается к локальному минимуму или максимуму сейсмического куба. Если в заданной окрестности экстремум найти не удалось, точка выбрасывается. Таким образом, получаем, более согласованный с сейсмическими данными набор поверхностей. Данная процедура полезна и для нейтрализации типичных проблем применения метода градиентного спуска.
Схема:
Цикл по всем узлам:
Цикл по набору поверхностей
1. Взять соответствующую узлу точку поверхности.
2. Взять отрезок соответствующей трассы сейсмического куба вокруг этой точки и найти в нем ближайший к точке нужный (максимум или минимум) локальный экстремум.
3. Если найти локальный экстремум удалось, то изменить глубину поверхности в этом узле на глубину локального экстремума.
4. Если найти локальный экстремум не удалось - в поверхности появляется дырка - в этом узле поверхность считается неопределенной.
Описание основных действий при выполнении способа автоматического выделения поверхностей для построения геолого-гидродинамической модели нефтегазового месторождения по сейсмическим данным:
Вход: набор трендовых поверхностей - начальное или стартовое приближение. При их отсутствии берутся константные по глубине поверхности.
Р, Q - кубы сейсмических атрибутов
опционально: сейсмический куб
Выход: набор поверхностей, используемых для построения геолого-гидродинамической сетки.
В качестве начального решения выбираются трендовые (при их отсутствии - константные) поверхности на грубой решетке. Каждая итерация - это сочетание описанных выше процедур. Последующая итерация производится на более мелкой решетке, а в качестве начального приближения берется решение предыдущей итерации. Итерации производятся до достижения максимального размера решетки.
Схема выполнения способа:
Выполняется в цикле:
Этап 1. Установить управляющие параметры алгоритма согласно текущим значениям шагов решетки, (поверхности).
Этап 2. Пересчитать имеющийся текущий набор поверхностей на решетку с текущими шагами.
Этап 3. Если задан сейсмический куб, то выполнить процедуру «подтягивания» к экстремумам.
Этап 4. Воспользоваться процедурой "растекания", чтобы распространить набор поверхностей на те точки решетки, где они не заданы.
Этап 5. Устранить взаимные пересечения поверхностей из набора процедурой «сортировки».
Этап 6. Применить процедуру «уточнения» набора поверхностей путем минимизации функционала методом градиентного спуска.
Этап 7. Устранить взаимные пересечения поверхностей из набора процедурой «сортировки».
Этап 8. Если решетка достигла максимального размера, то выход из цикла.
Этап 9. Пересчитать значения текущих шагов решетки для нового круга цикла.
Этап 10. Перейти к началу цикла.
Фиг.2-4 иллюстрируют результаты выполнения итераций способа при построении геолого-гидродинамической модели. Как видно из фиг.2, на которой изображены данные, еще не подвергшиеся обработке, и когда заданы максимальные допустимые величины на координатной сетке. В ходе выполнения способа при проведении множества итераций результат обработки все более уточняется, что позволяет получить более достоверные сведения о геолого-гидродинамической модели месторождения. На фиг.3 изображен промежуточный результат, демонстрирующий, насколько могут измениться входные данные, при проведении шести итераций. На фиг.4 изображен близкий к конечному результат, когда определены все или почти все поверхности в соответствии с входными данными и при проведении десяти итераций.
Изобретение относится к области моделирования нефтегазовых месторождений. Сущность: определяют решетку модели с заданным шагом и предельно допустимой величиной на координатной сетке (1). Задают управляющие параметры поверхностей относительно шага решетки (2). Определяют набор поверхностей решетки относительно ее шага (3). Определяют область, в которой определена поверхность, и добавляют узлы решетки, в которых поверхность не определена (4). Задают параметры кубов сейсмических атрибутов - p, q, задают координаты вновь добавленного узла - X, Y, задают координаты соседнего узла - x, y, в котором поверхность определена, и задают параметр глубины поверхности в этом узле - z (x, y) (5). Упорядочивают глубины поверхностей в указанном узле решетки по возрастанию и назначают глубину i-й поверхности в этом узле равной i-й по порядку глубине (6). Определяют поверхности для обработки (7). Определяют функционалы и градиенты поверхностей для обработки (8). Определяют величину текущего шага смещения вдоль градиента (9). Определяют для каждой обрабатываемой поверхности с помощью величины шага смещения градиента, для какого по счету шага достигается минимальное значение функционала (10). Когда для каждой обрабатываемой поверхности минимальное значение функционала меньше шага смещения градиента, то производят смещение вдоль градиента на найденное количество шагов (11). Сохраняют в памяти величину сделанного смещения и определяют максимум сделанных смещений (12). Исключают временно из обработки поверхности, для которых достигнуто уменьшение функционала (13). Определяют поверхности, для которых не удалось уменьшить функционал, и, когда такие поверхности определены, то повторяют этапы 7-13 (14). Повторно упорядочивают глубины определенных на указанном узле решетки поверхностей по возрастанию и назначают глубину i-й поверхности в этом узле равной i-й по порядку глубине (15). Определяют значения текущих шагов решетки по обновленным данным поверхностей (16). Итеративно повторяют все этапы способа до тех пор, пока не будет получена модель с заданными на этапах 1 и 2 параметрами (17). Технический результат: повышение точности построения геолого-гидродинамической модели нефтегазового месторождения. 3 н.п.ф-лы, 8 з.п.ф-лы, 4 ил.
1. Способ автоматического выделения поверхностей для построения геолого-гидродинамической модели нефтегазового месторождения по сейсмическим данным, заключающийся в выполнении этапов, на которых:
1) определяют решетку модели с заданным шагом и предельно допустимой величиной на координатной сетке;
2) задают управляющие параметры поверхностей относительно шага решетки;
3) определяют набор поверхностей решетки относительно ее шага;
4) определяют область, в которой определена поверхность, и добавляют узлы решетки, в которых поверхность не определена;
5) задают параметры кубов сейсмических атрибутов - p, q, задают координаты вновь добавленного узла - X, Y, задают координаты соседнего узла - x, y, в котором поверхность определена, и задают параметр глубины поверхности в этом узле - z(x, y);
6) упорядочивают глубины поверхностей в указанном узле решетки по возрастанию и назначают глубину i-й поверхности в этом узле равной i-й по порядку глубине;
7) определяют поверхности для обработки;
8) определяют функционалы и градиенты поверхностей для обработки;
9) определяют величину текущего шага смещения вдоль градиента;
10) определяют для каждой обрабатываемой поверхности с помощью величины шага смещения градиента, для какого по счету шага достигается минимальное значение функционала; причем
11) когда для каждой обрабатываемой поверхности минимальное значение функционала меньше шага смещения градиента, то производят смещение вдоль градиента на найденное количество шагов;
12) сохраняют в памяти величину сделанного смещения и определяют максимум сделанных смещений;
13) исключают временно из обработки поверхности, для которых достигнуто уменьшение функционала;
14) определяют поверхности, для которых не удалось уменьшить функционал, и, когда такие поверхности определены, то повторяют этапы 7-13;
15) повторно упорядочивают глубины определенных на указанном узле решетки поверхностей по возрастанию и назначают глубину i-й поверхности в этом узле равной i-й по порядку глубине;
16) определяют значения текущих шагов решетки по обновленным данным поверхностей;
17) итеративно повторяют все этапы способа до тех пор, пока не будет получена модель с заданными на этапах 1 и 2 параметрами.
2. Способ по п.1, отличающийся тем, что управляющие параметры представляют собой сейсмический куб.
3. Способ по п.2, дополнительно содержащий этап, на котором определяют точку поверхности узла решетки, определяют отрезок соответствующей трассы сейсмического куба вокруг этой точки и определяют в нем ближайший к точке локальный экстремум глубины.
4. Способ по п.3, отличающийся тем, что локальный экстремум является минимальным значением глубины.
5. Способ по п.3, отличающийся тем, что локальный экстремум является максимальным значением глубины.
6. Устройство для автоматического выделения поверхностей для построения геолого-гидродинамической модели нефтегазового месторождения по сейсмическим данным, содержащее:
один или множество процессоров;
модули ввода/вывода (I/O);
машиночитаемый носитель данных (память), который содержит код программы, который при выполнении побуждает процессор или процессоры выполнять этапы, на которых:
1) определяется решетка модели с заданным шагом и предельно допустимой величиной на координатной сетке;
2) задаются управляющие параметры поверхностей относительно шага решетки;
3) определяется набор поверхностей решетки относительно ее шага;
4) определяется область, в которой определена поверхность, и добавляют узлы решетки, в которых поверхность не определена;
5) задаются параметры кубов сейсмических атрибутов - p,q, задают координаты вновь добавленного узла - X, Y, задают координаты соседнего узла - x, y, в котором поверхность определена, и задают параметр глубины поверхности в этом узле - z(x,y);
6) упорядочиваются глубины поверхностей в указанном узле решетки по возрастанию и назначают глубину i-й поверхности в этом узле равной i-й по порядку глубине;
7) определяются поверхности для обработки;
8) определяются функционалы и градиенты поверхностей для обработки;
9) определяются величины текущего шага смещения вдоль градиента;
10) определяются для каждой обрабатываемой поверхности с помощью величины шага смещения градиента, для какого по счету шага достигается минимальное значение функционала; причем
11) когда для каждой обрабатываемой поверхности минимальное значение функционала меньше шага смещения градиента, то производится смещение вдоль градиента на найденное количество шагов;
12) сохраняется в памяти величина сделанного смещения и определяется максимум сделанных смещений;
13) исключаются временно из обработки поверхности, для которых достигнуто уменьшение функционала;
14) определяются поверхности, для которых не удалось уменьшить функционал, и, когда такие поверхности определены, то повторяют этапы 7-13;
15) повторно упорядочиваются глубины определенных на указанном узле решетки поверхностей по возрастанию и назначают глубину i-й поверхности в этом узле равной i-й по порядку глубине;
16) определяются значения текущих шагов решетки по обновленным данным поверхностей;
17) итеративно повторяются все перечисленные этапы до тех пор, пока не будет получена модель с заданными на этапах 1 и 2 параметрами.
7. Устройство по п.6, отличающееся тем, что управляющие параметры представляют собой сейсмический куб.
8. Устройство по п.6, отличающееся тем, что код программы дополнительно содержит этап, на котором определяется точка поверхности узла решетки, определяется отрезок соответствующей трассы сейсмического куба вокруг этой точки и определяется в нем ближайший к точке локальный экстремум глубины.
9. Устройство по п.8, отличающееся тем, что локальный экстремум является минимальным значением глубины.
10. Устройство по п.8, отличающееся тем, что локальный экстремум является максимальным значением глубины.
11. Машиночитаемый носитель данных, пригодный для использования в устройстве по любому из п.п.6-10, который содержит код программы, который при выполнении побуждает процессор или процессоры выполнять действия способов по любому из п.п.1-5.
| Левин Д.Н | |||
| Геолого-геофизическое и гидродинамическое моделирование залежей углеводородов для оптимизации их разработки | |||
| Автореф | |||
| диссертации на соискание ученой степени ктн | |||
| - М., январь 2012 | |||
| СПОСОБ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ ДЛЯ ВЫЯВЛЕНИЯ НЕФТЕГАЗОВЫХ ОБЪЕКТОВ | 2005 |
|
RU2289829C1 |
| СПОСОБ КОНТРОЛЯ ЗА РАЗРАБОТКОЙ НЕФТЯНЫХ ЗАЛЕЖЕЙ | 1998 |
|
RU2135766C1 |

