ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к сенсорному пользовательскому интерфейсу для электронных устройств и в электронных устройствах и более конкретно к тактильному устройству ввода, которое обнаруживает перпендикулярные, горизонтальные, вращательные вводы или их комбинации для электронных устройств и в электронных устройствах, и соответствующим способам.
УРОВЕНЬ ТЕХНИКИ
Сенсорные устройства ввода для электронных устройств в целом известны. Патент США № 7190350, озаглавленный “ Touch Screen with Rotationally Isolated Force Sensor ”, например, раскрывает сенсорный экран с одним или более датчиками, которые определяют местоположение вводов касанием на экране. Патент США № 7190350 также раскрывает изгибаемый материал, который уменьшает влияния искажения на определение местоположения касания.
Проблемой со многими устройствами ввода, которые могут воспринимать силу, приложенную перпендикулярно к поверхности устройства, является уменьшение нежелательной предварительной нагрузки датчика во время компоновки. Эта проблема свойственна датчикам, которые измеряют силу с использованием деформации или механического напряжения. Примеры таких датчиков, в частности, включают в себя резисторы, чувствительные к силе, измерители механического напряжения и емкостные датчики силы. Также в некоторых применениях устройств ввода желательно воспринимать горизонтальную силу или деформацию, и/или воспринимать вращение. Джойстик является примером известного устройства ввода, который может воспринимать эти типы вводов. Однако современные джойстики имеют тенденцию быть громоздкими и их нелегко реализовать в относительно тонких форм-факторах, например форм-факторах, требуемых в сотовых телефонах и других тонких портативных электронных устройствах. Кроме того, существующие применения устройств ввода связаны с существенным недостатком, что управление не принимает во внимание развитие операционной ситуации, в которой используют устройство или в которой выполняют идентификацию.
Различные аспекты, признаки и преимущества изобретения станут более полно понятными обычным специалистам в данной области техники после внимательного рассмотрения следующего его подробного описания с сопровождающими чертежами, описанными ниже. Чертежи могут быть упрощены для ясности и не обязательно начерчены в масштабе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - блок-схема портативного электронного устройства.
Фиг.2 иллюстрирует расположение датчика в устройстве сенсорного ввода портативного электронного устройства.
Фиг.3 иллюстрирует расположение датчика в устройстве сенсорного ввода портативного электронного устройства.
Фиг.4 иллюстрирует расположение датчика в устройстве сенсорного ввода портативного электронного устройства.
Фиг.5 - блок-схема последовательности этапов способа обнаружения сенсорного ввода в электронном устройстве.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Раскрыт сенсорный интерфейс, предназначенный для обнаружения вводов касанием для электронного устройства и в электронном устройстве, и соответствующие способы. В соответствии с одним вариантом осуществления генерируют первый сигнал в ответ на ввод касанием с помощью первого датчика, встроенного в изгибаемую часть поверхности электронного устройства. Генерируют второй сигнал с помощью второго датчика, удаленного от изгибаемой части, в ответ на ввод касанием, причем разность между сигналом первого датчика и сигналом второго датчика является указывающей ввод касанием в электронном устройстве. Процессор, имеющий вход, соединенный с выходом первого и второго датчиков, определяет входной сигнал на основании разности между выходными сигналами первого и второго датчиков. Сенсорный интерфейс может быть сконфигурирован с возможностью обнаружения горизонтальных вводов в плоскости, по существу, параллельной поверхности сенсорного интерфейса, вводов, перпендикулярных к поверхности сенсорного интерфейса, вращательных вводов и их комбинаций.
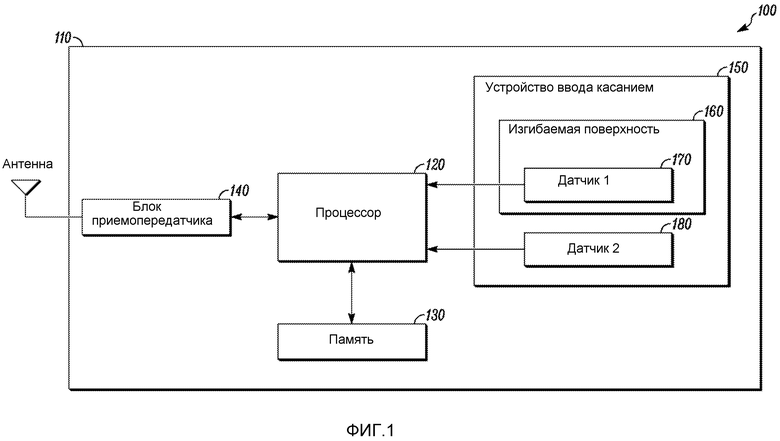
На фиг.1 портативное электронное устройство (PED) в целом содержит корпус 110, который содержит в себе процессор 120, соединенный с памятью 130, и пользовательский интерфейс, включающий в себя сенсорный интерфейс, предназначенный для приема вводов касанием от пользователя, как дополнительно объяснено ниже. Пользовательский интерфейс также может включать в себя малую клавиатуру и другие традиционные пользовательские устройства ввода. PED также может включать в себя устройства ввода и вывода аудио и устройство ввода данных, и выходные порты, как в целом известно обычным специалистам в данной области техники. Процессор может быть осуществлен как один или более микропроцессоров, микроконтроллеров, процессоров цифровых сигналов, конечных автоматов, логических схем, аналоговых схем или некоторых других устройств, которые обрабатывают информацию на основе операционных инструкций или инструкций программирования, которые могут быть осуществлены как программно-аппаратное обеспечение, или драйверы, или прикладное программное обеспечение. В качестве альтернативы процессор может быть осуществлен как одна или более схем аппаратного обеспечения, которые являются эквивалентными цифровому программируемому процессору или некоторому другому программируемому процессору. Память может быть осуществлена как энергозависимая или энергонезависимая память, как память произвольного доступа (RAM) или постоянная память (ROM), или как их комбинация.
Иллюстративное PED может быть осуществлено как сотовый или беспроводный телефон, персональный цифровой ассистент (PDA), блок дистанционного управления и/или как некоторое портативное карманное устройство. Вообще устройства ввода касанием, описанные в настоящей заявке, могут быть осуществлены в применениях, отличных от применений портативного электронного устройства. Такие применения включают в себя настольные компьютеры, компьютеры ноутбук или портативные переносные компьютеры, рабочие станции, станции пунктов продаж, машины операций с наличными, и автомобильные консоли среди огромного множества другого оборудования, которое включает в себя пользовательский интерфейс, для которого может быть использовано устройство тактильного ввода, но не ограничены ими. Таким образом, обычные специалисты в данной области техники, имеющие пользу от описания, приведенного в настоящей заявке, должны понять, что устройства ввода касанием, описанные таким образом, могут быть осуществлены в множестве портативных и фиксированных хост-устройствах.
В некоторых вариантах осуществления хост-устройство включает в себя одно или более блоков 140 приемопередатчиков, которые могут быть осуществлены как беспроводные или проводные модемы. PED, осуществленное как беспроводное устройство связи, может включать в себя один или более беспроводных приемопередатчиков, совместимых с соответствующими протоколами беспроводной связи, например DECT, GSM, UMTS, LTE и WiMax, среди других протоколов. Некоторые электронные устройства также включают в себя спутниковый приемник навигации, такой как GPS, GLONASS или Galileo, или другой спутниковый приемник. Некоторые спутниковые радиоприемники, такие как приемники XM-Sirius, также могут быть использованы для навигации. PED также может включать в себя приемопередатчик ближней связи, такой как Bluetooth или IrDA, для связи с другими устройствами.
На фиг.1 PED содержит устройство 150 тактильного или ввода касанием, включающее в себя изгибаемую поверхность 160, включающую в себя область тактильного взаимодействия, которая является открытой или открываемой на части корпуса, где пользователь может взаимодействовать с изгибаемой поверхностью. Несмотря на то, что поверхность 160 упомянута в настоящей заявке, как являющаяся изгибаемой, гибкость может быть легко не ощутимой для пользователя. Изгибаемая поверхность 160 должна быть достаточно изгибаемой, чтобы передавать силу тактильного ввода в датчики, которые дополнительно описаны ниже. Таким образом, до некоторой степени минимальная гибкость изгибаемой поверхности предписана чувствительностью датчиков. Иллюстративные материалы, которые могут быть использованы для формирования изгибаемой поверхности, включают в себя стекло, металлы, пластмассы и эластомеры, но не ограничены ими. Возможность изгибаться таких материалов может изменяться, по существу, в зависимости, как от внутренних свойств материала, так и размеров и конструкции изгибаемой поверхности, которая ее образует.
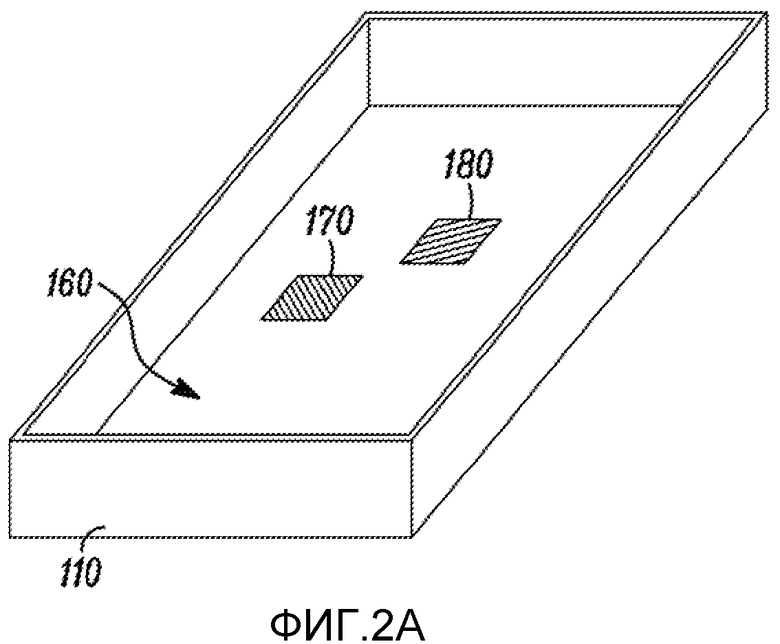
Фиг.2(а) иллюстрирует иллюстративное устройство ввода касанием, сконфигурированное с возможностью обнаружения тактильных вводов. Такие вводы могут быть интерпретированы как выполнение выбора, открытие файла или документа, выполнение инструкции, запуск программы, просмотр меню и тому подобное. Действия также могут включать в себя перемещение объекта, такого как указатель или курсор, или пиктограмма на экране дисплея. Устройство ввода касанием может быть сконфигурировано с возможностью работы как интерфейса ввода, так и интерфейса вывода, например панель ввода касанием или дисплей, соответственно. Иначе говоря, в некоторых вариантах осуществления панель ввода касанием интегрирована в устройство дисплея, которое составляет неотъемлемую часть электронного устройства, такого как PED, или является внешним вспомогательным устройством к нему. В других осуществлениях панель ввода касанием отделена от устройства дисплея.
На фиг.1 устройство тактильного ввода содержит первый и второй датчики 170, 180, которые создают разные выходные сигналы в ответ на определенный тактильный ввод, причем дифференциальные выходные сигналы датчиков интерпретируют как соответствующие предполагаемому вводу. Чтобы сгенерировать дифференциальный выходной сигнал, первый и второй датчики обнаруживают или воспринимают ввод, по меньшей мере, в одном или вдоль одного общего измерения, направления или оси. Общая ось может быть в плоскости x-y, параллельной поверхности сенсорного интерфейса, или вдоль оси z, перпендикулярной плоскости x-y, или некоторой их комбинации. Вводы вдоль или вокруг этих осей могут быть созданы с помощью перпендикулярного, горизонтального или вращательного движения или некоторой их комбинации в области тактильного ввода изгибаемой поверхности. Несмотря на то, что в примерах, описанных в настоящей заявке, раскрыты только два датчика, другие варианты осуществления могут соединять множество датчиков, чтобы обнаруживать движение вдоль каждого измерения, представляющего интерес.
Первый и второй датчики обычно конфигурируют таким образом, что первый и второй датчики создают дифференциальные выходные сигналы в ответ на определенный тактильный ввод в устройстве ввода касанием. Такая конфигурация может быть осуществлена с помощью физического разделения датчиков и/или с помощью встраивания датчиков в материалы, имеющие разные степени гибкости. В одном варианте осуществления первый датчик соединен с изгибаемой поверхностью таким образом, что тактильное взаимодействие с изгибаемой поверхностью создает выходной сигнал с помощью первого датчика. Например, первый датчик может быть (1) просто прикреплен к обратной стороне изгибаемой поверхности с использованием клея, (2) встроен в область касания или под областью касания изгибаемой поверхности, или (3) заформован в изгибаемую поверхность. В вышеупомянутых иллюстративных устройствах первый датчик составляет, по меньшей мере, часть области касания изгибаемой поверхности таким образом, что тактильное взаимодействие с первым датчиком вызывает смещение датчика в изгибаемом материале. В другом варианте осуществления первый датчик может быть помещен на внутренней печатной плате, которая механически изолирована от остальной части печатной платы. В этом устройстве как первый датчик, так и второй датчик могли бы быть смежными друг другу на печатной плате, причем первый датчик имеет вокруг себя механический вырез и соединен с изгибаемой поверхностью.
Второй датчик также может быть встроен в гибком материале, образующем изгибаемую поверхность, при условии, что второй датчик создает другой выходной сигнал относительно выходного сигнала первого датчика в ответ на данный тактильный ввод. Например, второй датчик может быть помещен на печатной плате в корпусе. В другом варианте осуществления второй датчик расположен на меньшей печатной плате или в ней, прикрепленной к главной печатной плате с помощью гибкого разъема, он может быть прикреплен с помощью клея к внутренней поверхности корпуса, например, на обратной поверхности корпуса, если первый датчик соединен с передней поверхностью корпуса, имеющего изгибаемую поверхность.
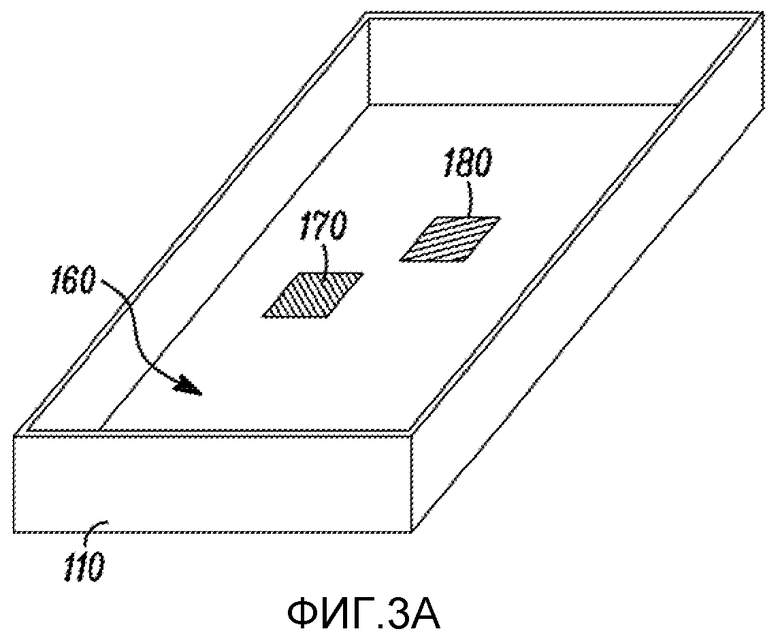
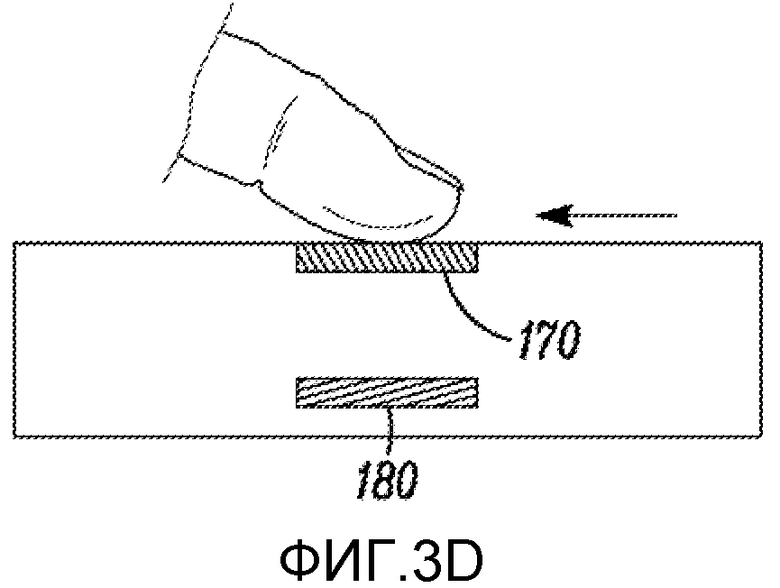
На фиг.2а первый датчик расположен в изгибаемой поверхности 160, расположенной на широкой лицевой стороне корпуса 110, а второй датчик 180 размещен в корпусе 110. Подобная конфигурация проиллюстрирована на фиг.3а. На фиг.2а изгибаемая поверхность 160 в целом включает в себя контактную или тактильную поверхность взаимодействия на доступной пользователю части корпуса 110, причем изгибаемая поверхность может быть деформирована, обычно незначительно, с помощью силы, приложенной с помощью тактильного ввода, вызванного взаимодействием с частью тела, пером или другим средством. Обычно изгибаемая поверхность является податливой частью устройства ввода касанием, которая реагирует на перпендикулярное, горизонтальное или вращательное движение или некоторую комбинацию таких вводов. Таким образом, такие входные силы сообщают, по меньшей мере, в один из первого и второго датчиков. В том смысле, что входные силы сообщают в оба датчика, входные силы сообщают дифференцированно. Изгибаемая поверхность, по существу, может быть плоской, искривленной, текстурной или тому подобной.
В одном осуществлении как первый, так и второй датчики являются датчиками динамической силы, которые могут измерять движение или обнаруживать ввод, по меньшей мере, вдоль одного общего измерения, направления или оси. Датчики динамической силы обычно обнаруживают некоторое движение, которое происходит в ответ на приложенную силу. Примеры таких датчиков движения включают в себя акселерометры, например, MEMS и пьезоэлектрические устройства, и гироскопы, помимо других датчиков.
Использование датчика дифференциальной силы исключает необходимость точной компоновки датчиков силы, которые зависят от статического смещения на поверхность прибора. Это уменьшает стоимость и сложность компоновки осуществления датчика силы. Кроме того, использование сигнала дифференциального датчика, чтобы обнаруживать или измерять тактильные вводы, устраняет ложные движения и движение вследствие неумышленных жестов, как будет объяснено более подробно ниже. Устройство дифференциального датчика уменьшает вероятность того, что внезапные смещения устройства ввода касанием не интерпретируют как нажатие или создание событий ввода. С использованием дифференциального датчика, например, движение устройства ввода касанием, возникающее в результате ходьбы, и движение устройства в целом, не будет давать ложные вводы, поскольку такое движение сообщает одинаковую силу в оба датчика. Например, на фиг.1 как первый, так и второй датчики (170, 180) воспринимают одинаковую силу от неумышленного движения устройства 100. Следовательно, относительное перемещение между первым датчиком 170 и вторым датчиком 180 будет равно нулю и будет считаться как ложный ввод. В некоторых вариантах осуществления, когда разность между выходными сигналам двух датчиков равна нулю или ниже предварительно определенного порога, ввод касанием также может быть отброшен как шум. Такой порог может быть основан на моделировании или экспериментальных или эмпирических данных.
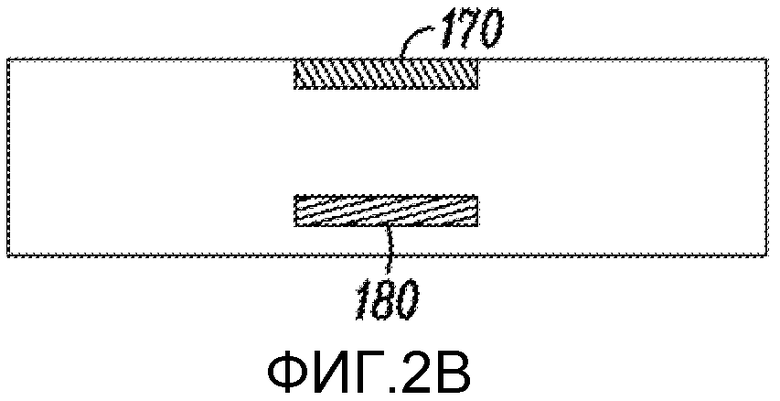
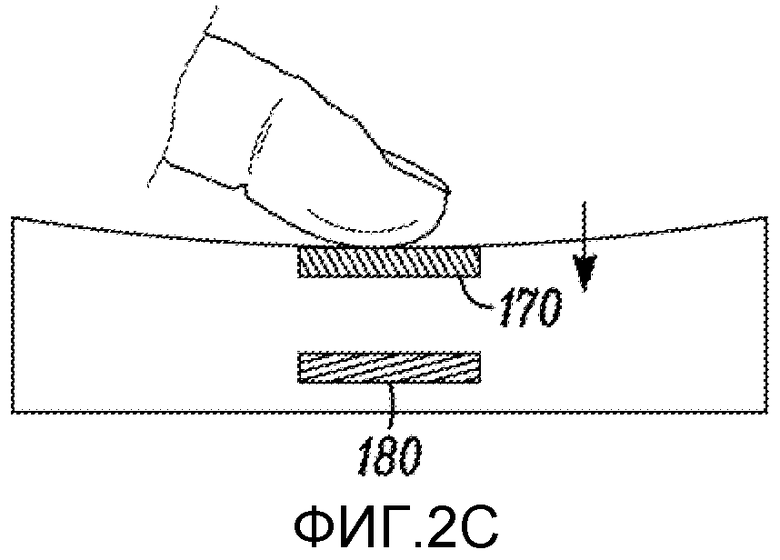
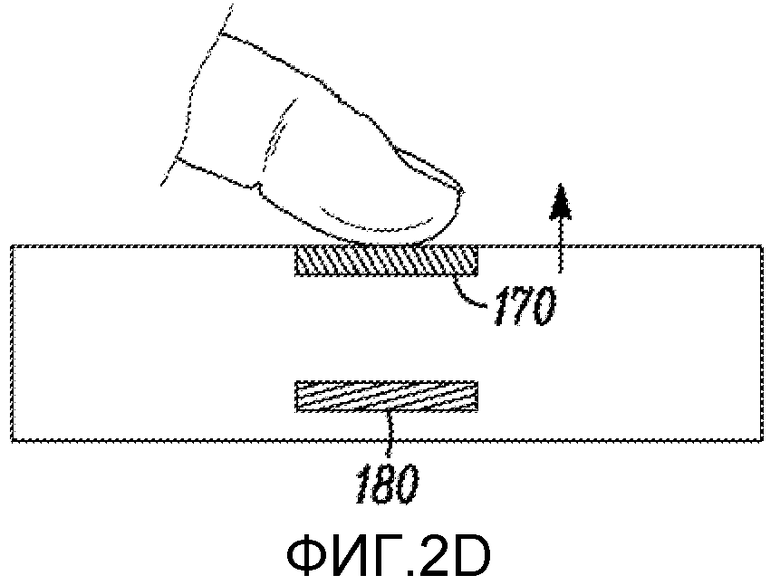
На фиг.2b-2d обычно когда тактильную силу прикладывают перпендикулярно или по нормали к изгибаемой поверхности, первый датчик 170 подвергают силе или он обнаруживает силу в перпендикулярном направлении. Обычно перпендикулярная сила, приложенная к устройству тактильного ввода, может быть составляющей силы, имеющей, как горизонтальную, так и перпендикулярную составляющие. Затем первый датчик преобразует принятый ввод в электрический выходной сигнал, который является пропорциональным тактильному вводу. Второй датчик 180 также подвергают перпендикулярной силе или он обнаруживает перпендикулярную силу в том же направлении, что и первый датчик. Затем второй датчик также преобразует принятый ввод в пропорциональный электрический выходной сигнал. Выход каждого из первого и второго датчика соединен с процессором, например процессором 120 на фиг.1. Однако ввод, обнаруженный с помощью каждого из первого и второго датчиков, является разным, и, следовательно, выходные сигналы, созданные с помощью первого и второго датчиков, также являются разными. Таким образом, процессор принимает разные выходные сигналы, созданные с помощью датчиков, и интерпретирует дифференциальный сигнал как входной сигнал в ответ на перпендикулярную силу, приложенную к тактильному устройству ввода. Удаление перпендикулярной силы также дает в результате генерацию выходных сигналов с помощью первого и второго датчиков, которые также могут быть интерпретированы как тактильный ввод с помощью процессора. Процессор может быть сконфигурирован с возможностью отображения входных сигналов в одну или несколько разных входных команд, в зависимости от контекста, в котором были приняты перпендикулярные тактильные вводы.
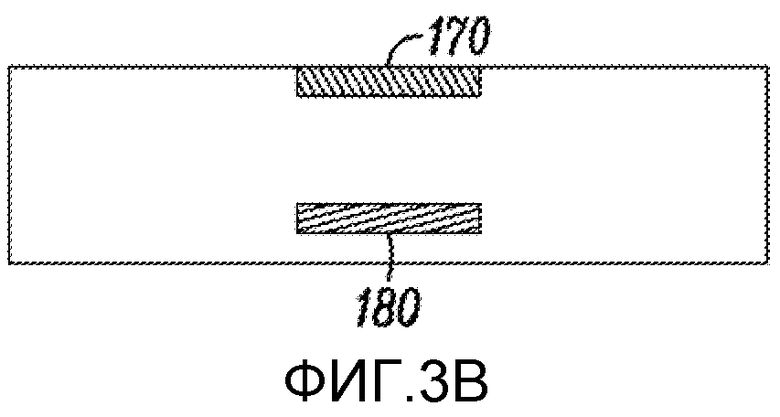
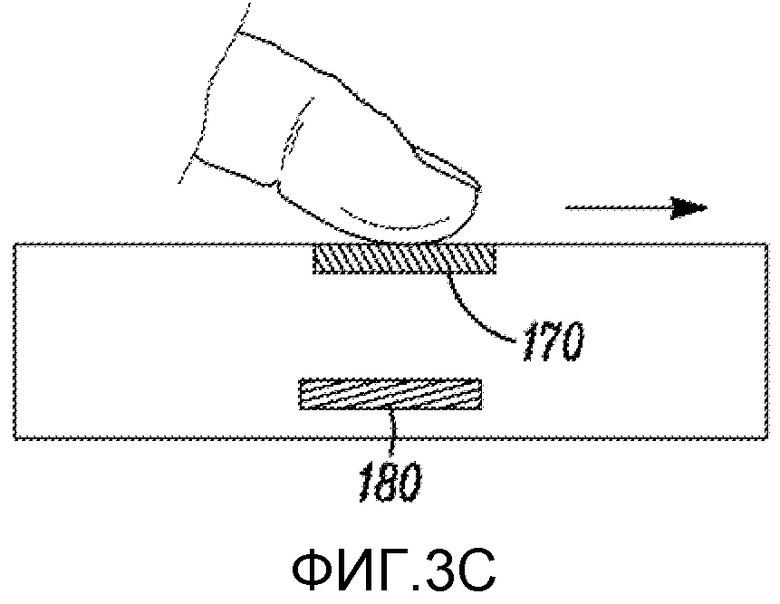
На фиг.3b-3d обычно когда тактильную силу прикладывают параллельно или, по существу, параллельно к изгибаемой поверхности, первый датчик 170 подвергают силе или он обнаруживает силу в направлении вдоль плоскости x-y, параллельной изгибаемой поверхности. Обычно горизонтальная сила, приложенная к устройству тактильного ввода, может быть составляющей силы, имеющей как перпендикулярную, так и горизонтальную составляющие. Затем первый датчик преобразует принятый ввод в электрический выходной сигнал, который является пропорциональным тактильному вводу. Подобным образом второй датчик 180 также подвергают горизонтальной силе или он обнаруживает горизонтальную силу в том же направлении, что и первый датчик. Затем второй датчик также преобразует принятый ввод в пропорциональный электрический выходной сигнал. Выход каждого из первого и второго датчика соединен с процессором, например процессором 120 на фиг.1. Однако ввод, обнаруженный с помощью каждого из первого и второго датчиков, является разным, и, следовательно, выходные сигналы, созданные с помощью первого и второго датчиков, также являются разными. Таким образом, процессор принимает разные выходные сигналы, созданные с помощью датчиков, и интерпретирует дифференциальный сигнал как входной сигнал в ответ на горизонтальную силу, приложенную к тактильному устройству ввода. Удаление горизонтальной силы также дает в результате генерацию выходных сигналов с помощью первого и второго датчиков, которые также могут быть интерпретированы как тактильный ввод с помощью процессора. Процессор может быть сконфигурирован с возможностью отображения входных сигналов в одну или несколько разных входных команд, в зависимости от контекста, в котором были приняты горизонтальные тактильные вводы.
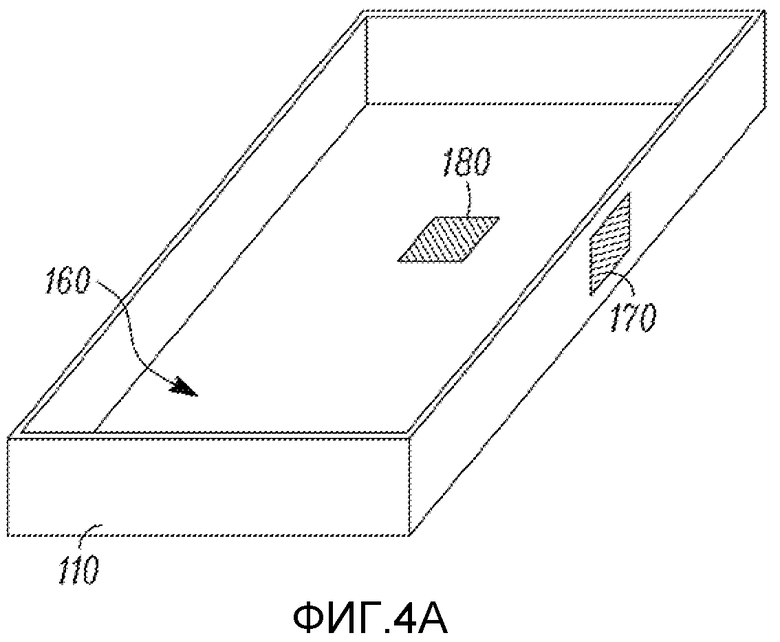
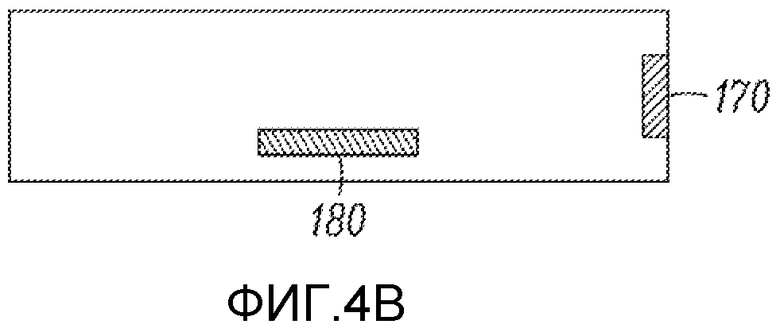
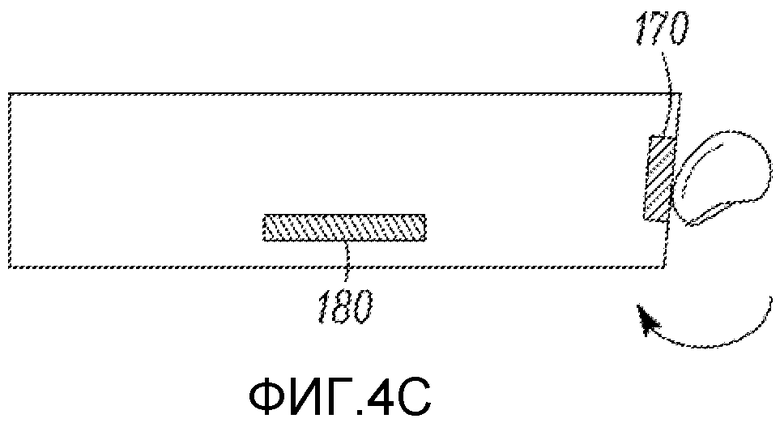
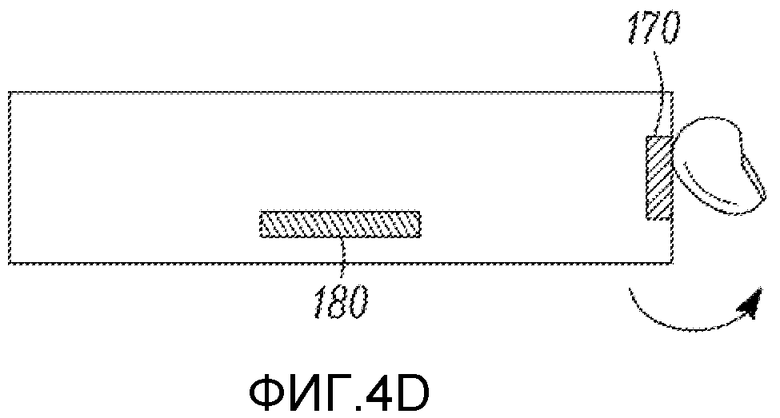
На фиг.4а первый датчик 170 расположен в изгибаемой поверхности 160, расположенной на узкой стороне корпуса 110, а второй датчик 180 расположен в корпусе 110. Изгибаемая поверхность 160 обычно включает в себя контактную или тактильную поверхность взаимодействия на доступной пользователю части корпуса 110, причем изгибаемая поверхность может быть деформирована с помощью силы, приложенной с помощью тактильного ввода, вызванного взаимодействием с частью тела, пером или другим средством. Изгибаемая поверхность 160 является податливой частью устройства ввода касанием, которая реагирует на вращательные входные силы, которые сообщают, по меньшей мере, в один из первого и второго датчиков. В том смысле что законную вращательную входную силу сообщают в оба датчика, входную силу сообщают дифференцированно.
На фиг.4b-4d обычно когда вращательную тактильную силу прикладывают к изгибаемой поверхности, первый датчик 170 подвергают вращательной силе или он обнаруживает вращательную силу, а затем преобразует принятый ввод в электрический выходной сигнал, который является пропорциональным тактильному вводу. Подобным образом второй датчик 180 также подвергают вращательной силе или он обнаруживает вращательную силу в тех же измерениях или вокруг той же оси, что и первый датчик. Затем второй датчик также преобразует принятый ввод в пропорциональный электрический выходной сигнал. Выход каждого из первого и второго датчика соединен с процессором, например, процессором 120 на фиг.1. Однако ввод, обнаруженный с помощью каждого из первого и второго датчиков, является разным, и, следовательно, выходные сигналы, созданные с помощью первого и второго датчиков, также являются разными. Таким образом, процессор принимает разные выходные сигналы, созданные с помощью датчиков, и интерпретирует дифференциальный сигнал как входной сигнал в ответ на вращательный ввод, приложенный к устройству тактильного ввода. Удаление вращательной силы также дает в результате генерацию выходных сигналов с помощью первого и второго датчиков, которые также могут быть интерпретированы как тактильный ввод с помощью процессора. Процессор может быть сконфигурирован с возможностью отображения входных сигналов в одну или несколько разных входных команд, в зависимости от контекста, в котором были приняты вращательные тактильные вводы.
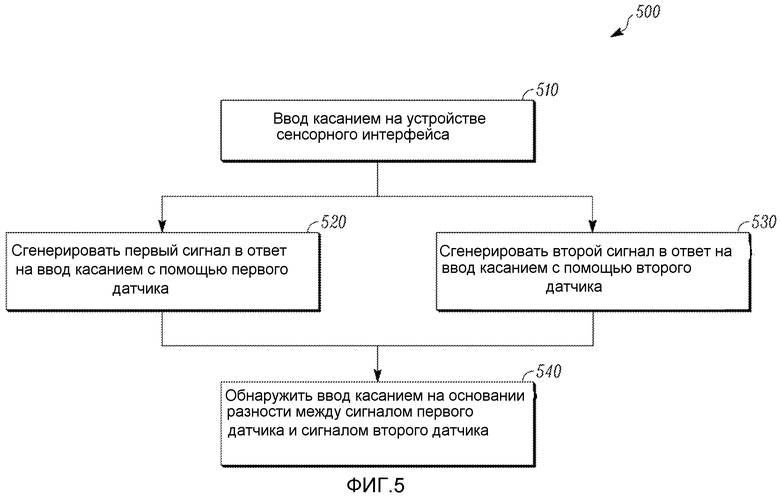
Фиг.5 - блок-схема 500 последовательности этапов процесса, предназначенного для обнаружения тактильного или ввода касанием в устройстве сенсорного интерфейса. На этапе 510 предоставляют тактильный ввод с помощью или посредством взаимодействия с тактильным пользовательским интерфейсом или в пользовательском тактильном интерфейсе, например изгибаемой поверхности 160 устройства 150 ввода касанием на фиг.1. На фиг.5 на этапе 520 генерируют первый сигнал с помощью первого датчика в ответ на ввод касанием в устройстве сенсорного интерфейса. Подобным образом на этапе 530 генерируют второй сигнал с помощью второго датчика в ответ на ввод касанием в устройстве сенсорного интерфейса. Генерация первого и второго сигналов с помощью первого и второго датчиков на этапах 520 и 530 происходит одновременно или, по существу, одновременно в ответ на ввод касанием в устройстве сенсорного интерфейса. На этапе 540 определяют ввод касанием на основании разности между сигналом первого датчика и сигналом второго датчика.
Несмотря на то, что настоящее раскрытие и наилучшие его способы описаны способом, устанавливающим правообладание, и дающим возможность обычным специалистам в данной области техники создать и использовать раскрытие и его способы, будет понятно и оценено, что имеются эквиваленты для иллюстративных вариантов осуществления, раскрытых в настоящей заявке, и что в них могут быть сделаны модификации и изменения, не выходя за рамки объема и сущности изобретений, которые должны быть ограничены неиллюстративными вариантами осуществления, а прилагаемой формулой изобретения.
Изобретение относится к сенсорному пользовательскому интерфейсу для электронных устройств и в электронных устройствах и более конкретно к тактильному устройству ввода, которое обнаруживает перпендикулярные, горизонтальные, вращательные вводы или их комбинации для электронных устройств и в электронных устройствах, и соответствующим способам. Технический результат - обеспечение приема ввода касанием в электронном устройстве и устранение ложных вводов в электронном устройстве за счет наличия двух, совместно действующих датчиков. Устройство содержит процессор, расположенный внутри корпуса электронного устройства, устройство ввода касанием, соединенное с процессором, причем устройство ввода касанием содержит податливую часть с поверхностью ввода касанием, первый датчик ввода, встроенный в податливую часть устройства ввода касанием, и второй датчик ввода, причем первый и второй датчики соединены с процессором. 2 н. и 3 з.п. ф-лы, 14 ил.
1. Электронное устройство, выполненное с возможностью приема ввода касанием, причем электронное устройство содержит:
процессор, расположенный внутри корпуса электронного устройства, и
устройство ввода касанием, соединенное с процессором, причем устройство ввода касанием содержит податливую часть с поверхностью ввода касанием, первый датчик ввода, встроенный в податливую часть устройства ввода касанием, и второй датчик ввода, причем первый и второй датчики соединены с процессором,
при этом первый датчик ввода является вращающимся вокруг оси, перпендикулярной к поверхности ввода касанием, в ответ на ввод касанием на поверхности ввода касанием податливой части устройства ввода касанием, и
при этом процессор сконфигурирован с возможностью обнаружения относительного вращательного перемещения между первым и вторым датчиками в ответ на ввод касанием на поверхности ввода касанием податливой части устройства ввода касанием,
причем относительное вращательное перемещение между первым и вторым датчиками пропорционально вводу устройства ввода касанием.
2. Электронное устройство по п.1, в котором первый и второй датчики являются акселерометрами.
3. Электронное устройство по п.1, в котором первый датчик ввода и второй датчик ввода являются датчиками динамической силы.
4. Электронное устройство по п.1, в котором внешняя поверхность образует часть корпуса.
5. Способ обнаружения ввода касанием в электронном устройстве, причем способ содержит этапы, на которых:
генерируют первый сигнал в ответ на ввод касанием, который является вращательным вокруг оси, перпендикулярной к поверхности изгибаемой части электронного устройства, с помощью первого датчика, встроенного в изгибаемую часть электронного устройства,
генерируют второй сигнал в ответ на ввод касанием на поверхности изгибаемой части электронного устройства с помощью второго датчика, удаленного от изгибаемой части электронного устройства, и
обнаруживают ввод касанием, который является вращательным вокруг оси, перпендикулярной к поверхности изгибаемой части электронного устройства, на основании разности между сигналом первого датчика и сигналом второго датчика.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 5708460, 13.01.1998 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Игральная кость | 1989 |
|
SU1621989A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОСМОТРА ИНФОРМАЦИИ НА ДИСПЛЕЕ | 2002 |
|
RU2288512C2 |

