Изобретение относится к области реактивных движителей. Может быть использовано в авиации и космонавтике для создания летательных аппаратов.
Известен инерционный движитель, представляющий собой энергосиловую машину, использующий энергию, запасенную маховиком [1]. Иногда применяется для привода машин, транспортных средств. Например, известен жиробус, гиробус. Жиробус, гиробус [от итал. giro, греческое gyros - круг, оборот и латинское omnibus - для всех], - вид аккумуляторного безрельсового транспорта, движущегося за счет кинетической энергии, накопленной в маховике [11]. Некоторое практическое применение с 1955 получили электрожиробусы (ЭЖ), оборудованные маховым агрегатом, состоящим из асинхронного движителя-генератора, сочлененного с маховиком, и тяговых электродвижителей. Раскручивание маховика ЭЖ осуществляется электродвижителем. Запасенной кинетической энергии достаточно для преодоления расстояния 4-5 км. КПД ЭЖ не более 50%; материалоемкость махового агрегата составляет 322 кг/кВт·ч (в 32 раза больше, чем у современных электрохимических источников тока). По удельным эксплуатационным затратам ЭЖ дороже троллейбуса на 5% и автобуса на 20%. Опытные ЭЖ эксплуатировались, например, на междугородных линиях Гент-Мерелбеке (Бельгия). ЭЖ является вспомогательным пассажирским транспортом для коротких трасс, пригодным для обслуживания взрывоопасных объектов.
Недостатком инерционного движителя является то, что не предусмотрено использование его для полета в безвоздушном космическом пространстве.
Известен инерционный движитель, представляющий собой энергосиловую машину, использующий энергию, запасенную маховиком [2]. Инерционный движитель содержит маховик.
Недостатком инерционного движителя является то, что не предусмотрено использование его для полета в безвоздушном космическом пространстве.
Прототипом изобретения является инерционный движитель [3], содержащий маховик, причем маховик содержит рабочее тело, при этом либо вокруг маховика выполнена турбина, причем маховик выполнен с возможностью подавать рабочее тело на внутреннюю рабочую поверхность турбины, либо система содержит спираль или кольцо с желобом на внутренней поверхности, обращенной к оси вращения маховика, при этом спираль или кольцо выполнены вокруг маховика, причем на выходе из спирали или кольца выполнено отверстие с возможностью выхода из отверстия ускоренного рабочего тела.
Недостатком инерционного движителя является малое предельное отношение энергии вращаемого рабочего тела к массе движителя, поскольку не предусмотрено использовать рабочее тело для увеличения прочности маховика на разрыв под действием центробежных сил и прочность маховика зависит исключительно от прочности его корпуса, в котором находится рабочее тело.
Задачей, стоящей перед изобретением, является обеспечение возможности увеличить предельное отношение энергии вращаемого рабочего тела к массе движителя.
Указанная задача решается тем, что в инерционном движителе, содержащем маховик, причем маховик содержит рабочее тело,
дополнительно маховик в качестве рабочего тела содержит, по крайней мере, одну нить, а движитель содержит систему отделения от маховика участка нити, причем системой предусмотрена возможность отделения от вращающегося маховика участка нити таким образом, чтобы на выходе из движителя участок нити двигался в заданном направлении.
Система отделения от маховика участка нити содержит лазер.
Маховик содержит пучок нитей, содержащий, по крайней мере, две нити, и держатель пучка нитей.
Инерционный движитель содержит устройство приведения во вращение маховика, при этом устройство приведения во вращение маховика содержит кольцо и трубу, соединяющую маховик и кольцо, причем сверху и снизу кольца выполнен ускоряющий зазор, образованный срезами двух расположенных вокруг кольца и обращенных друг к другу электродов, имеющих форму полых полуцилиндров, причем электроды выполнены с возможностью присоединения к генератору.
На кольце выполнена дистанционно управляемая система с аккумулятором, электрически соединенная, по крайней мере, с двумя электрически изолированными друг от друга проводящими пластинами, выполненными с противоположных сторон кольца напротив друг друга, при этом аккумулятор системы с аккумулятором выполнен с возможностью электрически заряжать, по крайней мере, две проводящие пластины зарядами противоположных знаков.
Инерционный движитель содержит систему с генератором, выполненным с возможностью вырабатывать электрическую энергию при вращении маховика или кольца, соединенного с маховиком.
Инерционный движитель содержит магнитный подвес, выполненный с возможностью удерживать на весу маховик во время вращения маховика.
Инерционный движитель содержит магнитный подвес, выполненный с возможностью удерживать на весу маховик во время вращения маховика, и при этом магнитный подвес содержит сверхпроводящий магнит.
С маховиком соединена система магнитных шарикоподшипников, содержащих, по крайней мере, два шарикоподшипника, причем маховик соединен с системой шарикоподшипников с возможностью свободного вращения.
Система отделения от маховика участка нити содержит ускоритель электронов.
Система отделения от маховика участка нити содержит пулемет.
Снизу маховика выполнен криостат, при этом внутри криостата выполнена структура, содержащая, по крайней мере, два сверхпроводящих слоя, разделенных диэлектриком, причем структура выполнена под маховиком в виде кольца.
Сверхпроводящий слой содержит сверхпроводящую керамику.
Снизу маховика выполнен криостат, при этом внутри криостата выполнена система структур со сверхпроводящими слоями, разделенных диэлектриком, содержащая, по крайней мере, два элемента, причем элемент содержит структуру, содержащую, по крайней мере, два слоя сверхпроводника, разделенных диэлектриком, при этом система соединена с системой изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком, и выполнена с возможностью дистанционного управления, при этом система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком, выполнена с возможностью получать электрическое питание либо от аккумулятора, либо от генератора, выполненных с возможностью вырабатывать электроэнергию при вращении маховика, при этом система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком, выполнена с возможностью располагать элементы системы структур со сверхпроводящими слоями, разделенных диэлектриком, так, что сверхпроводящие слои соединяются в кольца, расположенные снизу маховика, а также выполнена с возможностью располагать элементы так, что сверхпроводящие слои не соединяются в кольца.
Инерционный движитель содержит зарядное устройство, выполненное с возможностью на выходе из маховика заряжать участок нити электрическим зарядом определенного знака, при этом с зарядным устройством соединено устройство изменения направления движения участка нити после отделения, содержащее систему электродов, при этом система электродов содержит, по крайней мере, два электрода.
Инерционный движитель выполнен с возможностью соединения с летательным аппаратом, при этом предусмотрена возможность соединения с летательным аппаратом пары инерционных движителей с маховиками, при этом предусмотрено обеспечение возможности вращения маховиков в противоположных направлениях.
Инерционный движитель выполнен с возможностью соединения с тепловой электростанцией, содержащей котел, причем предусмотрена возможность отделения от маховика участка нити таким образом, чтобы участок нити после отделения сталкивался с котлом тепловой электростанции и нагревал котел тепловой электростанции.
Инерционный движитель содержит ракету, при этом предусмотрена возможность направлять участок нити таким образом, чтобы участок нити после отделения сталкивался с пламенем движителя ракеты и нагревал пламя движителя ракеты.
Инерционный движитель содержит ракетный движитель, выполненный с возможностью ускорять рабочее тело, при этом предусмотрена возможность направлять участок нити таким образом, чтобы участок нити после отделения от маховика сталкивался с рабочим телом движителя и нагревал рабочее тело движителя.
Инерционный движитель содержит корпус с вакуумированным объемом, снабженный средствами вакуумной откачки, при этом в корпусе выполнено окно для вылета участка нити.
Нить либо полностью выполнена из кевлара, либо армирована кевларом.
Нить либо полностью выполнена из синтетического волокна, либо армирована синтетическим волокном.
Нить либо полностью выполнена из углеродных нанотрубок, либо армирована углеродными нанотрубками.
Нить либо полностью выполнена из графена, либо армирована графеном.
Нить либо полностью выполнена из кварцевых волокон, либо армирована кварцевыми волокнами.
Нить либо полностью выполнена из углепластика, либо армирована углепластиком.
Инерционный движитель содержит пучок нитей, содержащий, по крайней мере, две нити, закрепленные держателем нити, соединенным с валом, соосным оси вращения маховика.
Нить либо намотана на маховик, либо инерционный движитель содержит нить, содержащий участок нити, выполненный с возможностью во время вращения маховика находиться в положении, при котором участок параллелен прямой линии, перпендикулярной оси вращения и проходящей через ось вращения.
Инерционный движитель содержит корпус с вакуумированным объемом, снабженный средствами вакуумной откачки, при этом в корпусе выполнено окно для вылета участка нити, выполненное с возможностью герметично закрываться и отрываться, при этом маховик содержит пучок нитей, содержащий, по крайней мере, две нити, закрепленные держателем пучка нитей, соединенным с валом, соосным оси вращения маховика, при этом вал соединен с системой приведения маховика во вращение, причем вал либо подвешен в корпусе на магнитном подвесе, либо соединен с корпусом магнитными шарикоподшипниками, при этом вал, держатель пучка нитей, пучок нитей, система отделения участка нити и система приведения маховика во вращение выполнены в вакуумированном объеме внутри корпуса.
Маховик содержит пучок нитей, содержащий, по крайней мере, две нити, закрепленные держателем пучка нитей, выполненным в центре маховика так, чтобы огибающая концов нитей, лежащая в плоскости вращения маховика, вращалась вокруг центра масс держателя.
Инерционный движитель выполнен с возможностью соединения с тепловой электростанцией, причем предусмотрена возможность отделения от маховика участка нити таким образом, чтобы участок нити после отделения сталкивался с топливом тепловой электростанции и нагревал топливо тепловой электростанции.
Инерционный движитель содержит, по крайней мере, два маховика, выполненных с одной осью вращение параллельно друг другу, при этом корпус имеет цилиндрическую оболочку с окнами для каждого маховика для вылета рабочего тела в виде отделенных участков нитей, причем с корпусом соединено, по крайней мере, две системы отделения участка нити.
Система отделения участка нити содержит лазер, при этом предусмотрена возможность направлять лазерный луч, по крайней мере, на два участка пучка нитей маховика вдоль длины нити с шагом, равным длине отделяемого участка нити, причем предусмотрена возможность направлять луч лазера импульсами.
Нить имеет прямоугольное поперечное сечение.
Маховик содержит пучок нитей, содержащий, по крайней мере, две нити, закрепленные держателем нити, причем нить выполнена прямоугольного сечения, при этом в пучке выполнены, по крайней мере, два параллельных слоя нитей, перпендикулярных оси вращения маховика, причем нити в слое скреплены друг с другом, при этом вне части пучка, сжатой держателем, предусмотрена возможность отделения части одного слоя нитей от другого слоя.
Такое техническое решение обеспечивает возможность увеличить предельное отношение энергии вращаемого рабочего тела к массе движителя, поскольку рабочим телом являются нити, вся масса которых используется для обеспечения прочности маховика. Это позволяет увеличить кинетическую энергию вращения рабочего тела - нитей по отношению к массе всего маховика, состоящего из рабочего тела - нитей и держателя пучка нитей.
Также такое исполнение обеспечивает возможность создания тяги в безвоздушном пространстве космоса, поскольку позволяет маховику выбрасывать ускоренное во время вращения рабочее тело - участки нитей, в определенном направлении, создавая тем самым реактивную тягу.
Это осуществляется за счет того, что маховик разгоняют вместе с рабочим телом - нитями, а затем отделяют участки нити устройством для отделения участка нити. Например, пережигают лазерным лучом в момент времени, когда линейная скорость участка нити направлена на окно для вылета участка нити так, что после отделения вращающийся участок нити продолжает двигаться в нужном направлении.
Также такое техническое решение обеспечивает возможность увеличить удельное содержание энергии, приходящееся на единицу веса инерционного движителя, больше, чем удельное содержание энергии в химическом топливе, за счет того в рабочем теле - в нитях, приведенных во вращении вместе с маховиком, запасенная энергия растет с ростом радиуса со скоростью быстрее, чем возрастают центробежные разрушающие нагрузки.
При этом такое техническое решение обеспечивает возможность увеличить скорость истечения рабочего тела - участков нитей, по сравнению с химическим ракетным топливом, также за счет того, что в рабочем теле - в нитях, приведенных во вращение вместе с маховиком, запасенная энергия вместе со скоростью растет с ростом радиуса быстрее, чем возрастают центробежные разрушающие нагрузки.
За счет этого такое техническое решение позволит при радиусе вращения стальных нитей маховика 8 м скорость истечения рабочего тела - участков нитей, увеличить до скорости 53,38 км/сек. Детальные расчеты этого параметра и нижеследующих параметров приведены в опубликованном, выданном патенте на изобретение автора [3].
Это превышает максимальную скорость истечения продуктов сгорания химического ракетного топлива, которая не превышает 5,7 км/сек [4], в 9,37 раз.
Однако для существенного увеличения удельного содержания энергии в маховиках есть дополнительные возможности. Для этого, например, можно использовать для изготовления нитей маховика новые материалы:
синтетические волокна и, в первую очередь, углеродные нанотрубки. Синтетические волокна кевлар и углепластик способны увеличить прочность нитей маховика до 20 раз на единицу его веса по сравнению со сталью, углеродные нановолокна способны увеличить этот показатель в сотни раз, поскольку углеродные нановолокна в 78,7 раз прочнее и значительно легче стали. Информация об изготовлении скрученных канатов длиной 10 км опубликована [5].
В другом случае кевлар может увеличить удельную прочность маховика на единицу его веса по сравнению со сталью в 20 раз, углепластик в диапазоне от 10 до 20 раз, а углеродные нанотрубки могут увеличить его прочность в 78,7 раз [6, 7, 8, 9, 10].
Технологии изготовления длинных нанотрубок разработаны в Кембриджском университете для изготовления космического лифта для НАСА. Они разработали, как сделать гигантскую наноконструкцию длиной 230 тысяч километров. Они разработали новый материал для изготовления нанотрубок, а также нашли способ их многократного соединения вместе, чтобы сформировать длинные отрезки [11].
Соответственно, скорость истечения из маховиков рабочего тела - участков нитей, в состав которых входят углеродные нанотрубки, может быть увеличена еще до 8,871 раз, по сравнению с маховиком, содержащим стальные нити длиной 8 м, и составит 473,55 км/сек.
Это превышает максимальную скорость истечения продуктов сгорания химического ракетного топлива, которая не превышает 5,7 км/сек [4], в 83,07 раз. Соответственно, во много раз уменьшится и время полета на другие планеты Солнечной системы, по сравнению с использованием известных ракетных движителей на химическом ракетном топливе.
Не обнаружено технических решений, выполняющих поставленную задачу аналогичными техническими средствами.
На фиг.1 изображена принципиальная схема инерционного движителя Богданова.
На фиг.2 изображен вид сверху инерционного движителя Богданова.
На фиг.3 изображен вид спереди инерционного движителя Богданова.
На фиг.4 изображен вид сзади инерционного движителя.
На фиг.5 изображен вид снизу инерционного движителя.
На фиг.6 изображен разрез А-А.
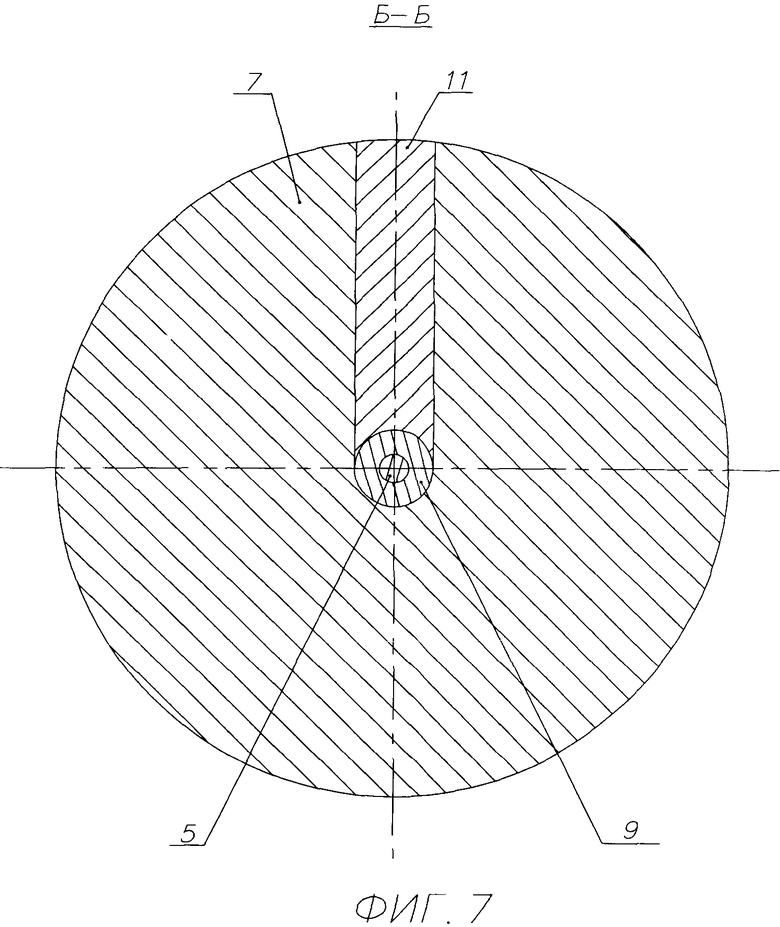
На фиг.7 изображен разрез Б-Б.
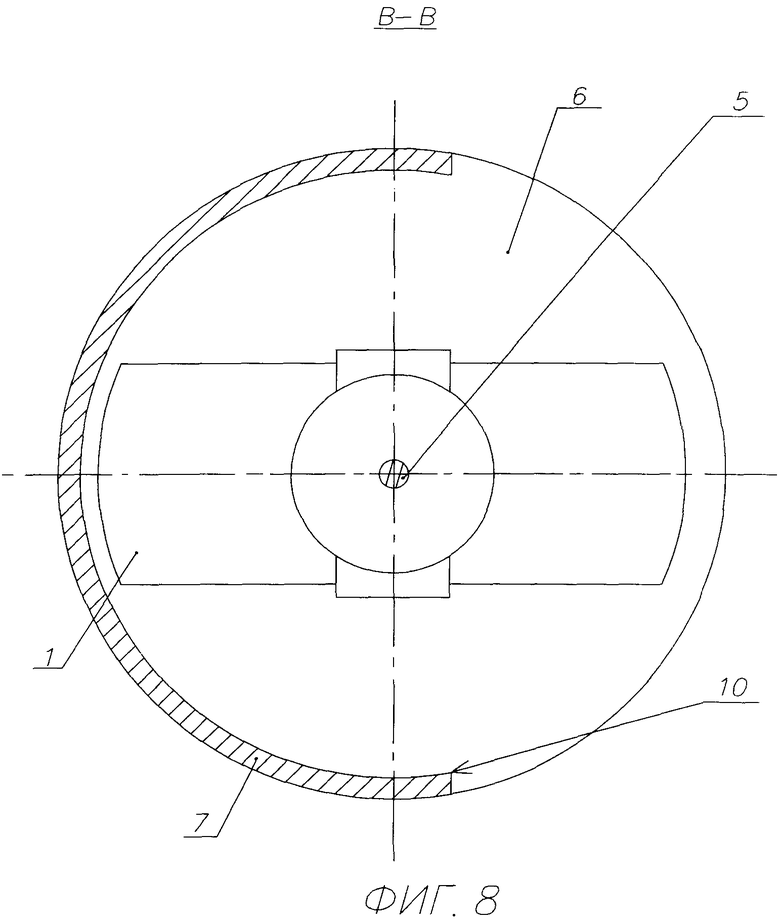
На фиг.8 изображен разрез В-В.
На фиг.9 изображена принципиальная схема маховика инерционного движителя Богданова.
На фиг.10 изображен вид спереди маховика инерционного движителя Богданова.
На фиг.11 изображен вид сверху маховика инерционного движителя Богданова.
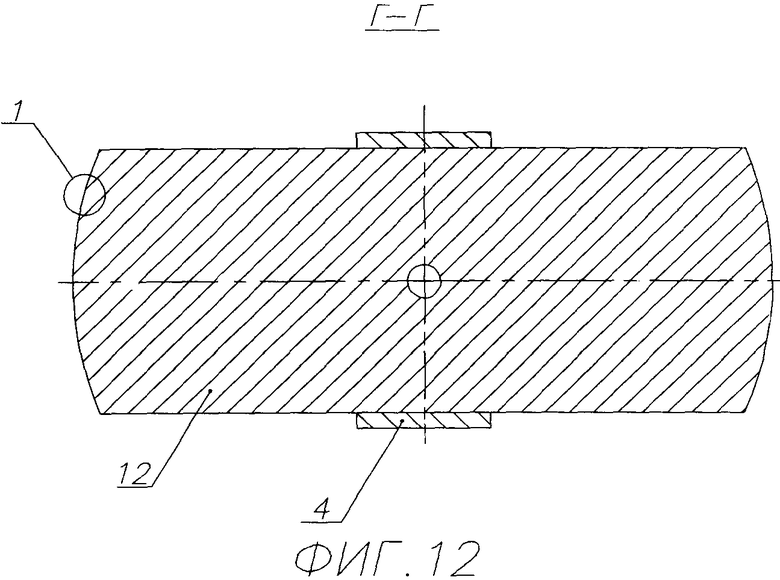
На фиг.12 изображен разрез Г-Г.
На фиг.13 изображен выносной элемент 1.
Инерционный движитель Богданова, далее просто инерционный движитель или просто движитель, состоит из следующих элементов.
Маховик 1 инерционного движителя в составе рабочего тела (в качестве рабочего тела) содержит пучок 12 нитей, содержащий нити 2, 3, и держатель 4 пучка нитей. Держатель 4 пучка нитей держит пучок 12 нитей, сжимает его в центральной части пучка и фиксирует положение нитей.
Держатель пучка нитей может быть выполнен, например, в виде прочного каркаса, выполненного из особопрочного материала. Например, он может содержать арматуру из нитей, скрепленных наполнителем или спрессованных и скрепленных путем нагревания.
Например, он может содержать арматуру из нитей графена, спрессованных и скрепленных путем нагревания.
Держатель 4 пучка нитей соединен с валом 5, соосным оси вращения маховика, при этом вал 5 соединен с кольцом 6 устройства приведения маховика во вращение.
Вал 5 соединен с корпусом 7 магнитными шарикоподшипниками 8, 9. Корпус 7 выполнен с вакуумированным объемом и снабжен средствами вакуумной откачки. В корпусе выполнено окно 10 для вылета участка нити, выполненное с возможностью закрываться в плотных слоях атмосферы и отрываться в безвоздушном космическом пространстве. С корпусом 7 соединена система 11 отделения участка нити. Например, лазер. При этом предусмотрена возможность направлять лазерный луч на различные участки пучка 12 нитей маховика вдоль длины нити с шагом, равным длине отделяемого участка нити. Предусмотрена возможность направлять луч лазера короткими мощными импульсами. Нить выполнена прямоугольного сечения. Например, квадратного сечения. При этом нити в пучке нитей выполнены слоями, перпендикулярными оси вращения маховика, причем нити в слое скреплены друг с другом и не скреплены с нитями других слоев вне части пучка, сжатой держателем. Для этого, например, нити соседних слоев выполнены из материалов, которые не смачивают друг друга, если один из них расплавлен, а другой находится в твердом состоянии. При этом вне части пучка, сжатой держателем, предусмотрена возможность отделения одного слоя от другого слоя. Причем глубина проникновения лазерного луча в слой не превышает толщины слоя, а мощность импульса лазерного излучения достаточна для расплавления места соединения участка нити с остальной частью нити.
Система 10 выполнена над маховиком 1, а именно над пучком 12 нитей маховика.
Предусмотрена возможность вводить через окно 10 внутрь вакуумированного объема корпуса 10 элементы устройства приведения маховика во вращение и после разгона маховика 1 с пучком 12 нитей выводить эти введенные элементы устройства приведения маховика во вращение обратно из инерционного движителя. Например, с помощью автоматики или телеметрии. Детальное описание элементов устройства приведения маховика во вращение даны в опубликованном, выданном патенте на изобретение автора [3].
Инерционный движитель Богданова работает следующим образом.
В составе (в качестве) рабочего тела маховика 1 инерционного движителя вращается пучок нитей 12, в составе которого вращаются нити 2, 3, закрепленные держателем 4 пучка нитей. Держатель 4 пучка нитей держит пучок 12 нитей, сжимает его в центральной части пучка и фиксирует положение нитей.
Держатель 4 пучка нитей вращается вместе с валом 5 вокруг оси вращения маховика, при этом вал 5 приводит во вращение кольцо 6 устройства приведения маховика во вращение, причем вал 5 во время вращения соединен с корпусом 7 магнитными шарикоподшипниками 8, 9.
Магнитные шарикоподшипники 8, 9 уменьшают до нуля торможение и нагрев трением вала 5 о корпус 7 во время вращения. В корпусе 7 создается вакуум внутри вакуумированного объема средствами вакуумной откачки. Вакуум нужен для уменьшения до нуля нагрева от трения о воздух составных частей маховика пучка нитей и держателя пучка нитей во время вращения, за счет уменьшения до нуля трения о воздух во время вращения.
Окно 10 для вылета участка нити открывается в вакуумированном зале электростанции. Затем, например, с помощью автоматики или телеметрии, внутрь вакуумированного объема корпуса 7 вставляют неподвижные элементы устройства приведения маховика во вращение и приводят с их помощью во вращение кольцо 6 устройства приведения маховика во вращение. А вместе с кольцом 6 приводят во вращение вал 5 и маховик в виде пучка 1 с нитями, закрепленными держателем 4.
Детальные описания работы кольца 6 устройства приведения маховика во вращение и всего этого устройства приведены в опубликованном, выданном патенте на изобретение автора [3]. После приведения во вращение маховика в виде пучка 1 с нитями, закрепленными держателем 4, все элементы устройства приведения маховика во вращение, кроме кольца 6, из вакуумированного объема корпуса 7 выводятся, и окно 10 для вылета участка нити закрывается.
Каким-то образом, например на ракете, инерционный двигатель с поверхности Земли доставляется в безвоздушное космическое пространство.
Окно 10 для вылета участка нити в плотных слоях атмосферы закрыто и отрывается в безвоздушном космическом пространстве. Система 11 отделения участка нити, например лазер, отсоединяет участок вращающейся нити от пучка 12 нитей маховика 1 в тот момент времени, когда линейная скорость вращения нити направлена в сторону открытого окна 10.
Для этого место соединения участка нити с другой частью нити нагревает лазерный луч, место соединения нагревается, в нем значительно уменьшается прочность на разрыв, и участок нити за счет действия центробежной силы отсоединяется, летит в нужном направлении и создает реактивную тягу.
Отделенный участок нити, обладающий в момент отделения линейной скоростью вращения, после отделения имеет такую же скорость прямолинейного поступательного движения и движется с этой скоростью в сторону открытого окна 10, выходит через него наружу и создает реактивную тягу.
Лазер направляет лазерный луч на различные участки пучка 12 нитей маховика вдоль длины нити с шагом, равным длине отделяемого участка нити. Лазер направляет луч лазера короткими мощными импульсами. Нити в слое выполнены прямоугольного сечения, например квадратного сечения, таким образом, чтобы лазерное излучение не проходило между нитями. При этом лазер отделяет участки нитей частями слоев, перпендикулярных оси вращения маховика, причем нити в слое скреплены друг с другом и не скреплены с нитями других слоев вне части пучка, сжатой держателем. Для этого, например, нити соседних слоев выполнены из материалов, которые не смачивают друг друга, если один из них расплавлен, а другой находится в твердом состоянии. Причем лазерный луч проникает в слой на глубину, не превышающую толщины слоя, а мощность импульса лазерного излучения достаточна для расплавления места соединения участка нити с остальной частью нити.
Различные варианты и дополнения.
Инерционный движитель может содержать устройство приведения во вращение маховика, при этом устройство приведения во вращение маховика содержит кольцо и трубу, соединяющую маховик и кольцо, причем сверху и снизу кольца выполнен ускоряющий зазор, образованный срезами двух расположенных вокруг кольца и обращенных друг к другу электродов, имеющих форму полых полуцилиндров, причем электроды выполнены с возможностью присоединения к генератору.
На кольце может быть выполнена дистанционно управляемая система с аккумулятором, электрически соединенная, по крайней мере, с двумя электрически изолированными друг от друга проводящими пластинами, выполненными с противоположных сторон кольца напротив друг друга, при этом аккумулятор системы с аккумулятором выполнен с возможностью электрически заряжать, по крайней мере, две проводящие пластины зарядами противоположных знаков.
Детальные описания этого элемента и работы этого элемента приведены в опубликованном, выданном патенте на изобретение автора [3].
Устройство приведения во вращение маховика работает следующим образом. Сначала идет процесс накопления в устройстве энергии.
Маховик 1 в виде пучка 12 нитей, закрепленных в держателе 4 пучка нитей, приводят во вращение элементы устройства приведения во вращение маховика. Это устройство выполнено по аналогии с ускорителем заряженных частиц циклотроном и работает по аналогии с ним.
Известно, что циклотрон периодически подает высокочастотное переменное электрическое поле на ускоряющий зазор, образованный срезами двух расположенных вокруг маховика и обращенных друг к другу электродов, имеющих форму полых полуцилиндров - дуантов [12]. Дуанты присоединяются к полюсам высокочастотного генератора через передающие линии. Например, возможно, через четвертьволновые линии.
Подробнее устройство приведения во вращение маховика работает следующим образом.
Внешний источник питания, например атомная или термоядерная электростанция, периодически подает высокочастотное переменное электрическое поле на ускоряющий зазор, образованный срезами двух расположенных вокруг кольца 6 и обращенных друг к другу электродов, частично имитирующих форму полых полуцилиндров - дуантов [12]. Электроды представляют собой два полукольца, электрически соединенных внутренними периметрами половиной проводящей трубы. Электроды присоединяются к полюсам высокочастотного генератора внешнего источника питания через передающие линии. Например, возможно, через четвертьволновые линии. В качестве внешнего источника питания целесообразно использовать атомную электростанцию с реакторами на быстрых нейтронах, развитие которых стало приоритетом для Росатома, поскольку позволяет получать в 100 раз больше энергии на единицу ядерного топлива и позволяет использовать бросовый уран 238, которого очень много в отвалах. Кроме того, в качестве внешнего источника энергии целесообразно использовать гибридерный термоядерный реактор - гибридер. Сейчас уже созданы демонстрационные термоядерные реакторы с энергетическим выходом 1-2. Энергетический выход в таком реакторе можно увеличить за счет использования для получения дополнительной энергии бросового урана 238 или тория 233, которые в термоядерном реакторе будут давать новые делящиеся материалы для атомной электростанции.
Устройство приведения во вращение маховика вращает маховик 1 в виде пучка 12 нитей и держателя 4 пучка нитей с помощью кольца 6. Кольцо 6 вращают электроды устройства приведения во вращение маховика следующим образом.
На кольце 6 выполнена дистанционно управляемая система с аккумулятором, соединенная с проводящими пластинами. Аккумулятор системы с аккумулятором электрически заряжает электрически изолированные друг от друга проводящие пластины зарядами противоположных знаков. Проводящие пластины с разными знаками периодически чередуются друг с другом.
Например, проводящие пластины с разными знаками электрических зарядов выполнены на противоположных сторонах кольца 6. В этом случае пластины с одним знаком электрического заряда и пластины с противоположным знаком электрического заряда в зазоре электрическим полем ускоряются в противоположных направлениях, увеличивая крутящий момент кольца или маховика.
Проводящие пластины выполнены на угловых сегментах кольца 6 с одинаковыми периодами чередования друг с другом, который коррелируется с частотой переменного напряжения, подаваемого на электроды. С ростом частоты вращения кольца 6 частота переменного напряжения, подаваемого на электроды устройства приведения во вращение маховика, синхронно увеличивается.
Проводящие пластины находятся в ускоряющем зазоре, на который подают переменное электрическое поле, которое ускоряет пластины вместе с кольцом 6 и валом 5 и заставляет их вращаться с ускорением. Переменное электрическое поле меняют синхронно с изменением скорости вращения.
Скорость вращения увеличивают до некоторой критической величины, ограниченной сверху прочностью материала кольца, вала нитей и держателя пучка нитей.
Вместе с системами с аккумулятором могут быть выполнены системы с электрическими генераторами, которые вырабатывают электрическую энергию при вращении колец или маховиков.
Следующее дополнение.
Кольцо 6, вал 5, маховик 1 могут удерживать на весу элементы магнитного подвеса.
Например, содержащие сверхпроводящие магниты, кольцевые рельсы и электроды.
Элементы магнитного подвеса могут использовать не только магнитные поля, но и электрические поля для удержания на весу маховика 1, вала 5 и кольца 6. Также эти элементы могут использовать систему датчиков с обратной связью, контролирующих положение кольца 6, вала 5, маховика 1 и дающих сигналы на систему регулировки работы магнитного подвеса. Также они могут использовать в своей работе известный эффект зависания сверхпроводника на магнитом - так называемый эффект «Гроба Магомеда».
Использовать магнитный подвес сверху и снизу от электродов устройства приведения во вращение маховика необходимо по той причине, что переменные электрические и магнитные поля нагревают сверхпроводящие магниты магнитного подвеса вплоть до разрушения сверхпроводимости. Поэтому электроды устройства приведения во вращение маховика должны быть выполнены вне магнитных подвесов. И лучшее расположение электродов устройства приведения во вращение маховика и, соответственно, кольца 6 - это расположение между элементами магнитного подвеса на удалении от них.
Элементы магнитного подвеса выполнены сверху и снизу от электродов устройства приведения во вращение маховика с возможностью экранирования элементов от переменных электрических и магнитных полей, создаваемых электродами. Например, вокруг электродов может быть выполнен массивный разомкнутый медный кожух, выполненный с возможностью экранирования переменных электрических и магнитных полей, выполненный по аналогии с аналогичным кожухом, применяемым для аналогичных целей в токамаках. В элементах, содержащих кольцевые рельсы, пускают по кольцевым рельсам ток и подвешивают маховик силой отталкивания между токами противоположных направлений. В элементах, содержащих электроды, между электродами создают электрические поля так, чтобы возникающая электрическая сила отталкивания или притяжения поддерживала необходимый зазор между элементами магнитного подвеса.
Поскольку циклотрон способен разгонять заряженные частицы до релятивистских скоростей, то скорости, до которых способно разогнать маховик предложенное устройство приведения во вращение маховика, ограничены сверху только прочностью материалов маховика и колец.
Инерционный движитель может содержать магнитный подвес, выполненный с возможностью удерживать на весу маховик во время вращения маховика, и при этом магнитный подвес может содержать сверхпроводящий магнит.
Детальные описания этого элемента и работы этого элемента приведены в опубликованном, выданном патенте на изобретение автора [3].
Инерционный движитель может содержать систему с генератором, выполненным с возможностью вырабатывать электрическую энергию при вращении маховика или кольца, соединенного с маховиком.
В этом случае генератор вырабатывает электрическую энергию, которая может идти на создание зарядов пластин. А также на обеспечение энергией других элементов инерционного двигателя. Например, системы отделения участка нити. Например, лазера, ускорителя электронов или пулемета. Или на обеспечение энергией системы открытия и закрытия окна 10.
Система отделения от маховика участка нити может содержать ускоритель электронов.
В этом случае место соединения участка нити с другой частью нити нагревает поток электронов, место соединения нагревается, в нем значительно уменьшается прочность на разрыв, и участок нити отсоединяется, летит в нужном направлении и создает реактивную тягу.
Система отделения от маховика участка нити может содержать пулемет.
В этом случае пулемет посылает в сторону пучка 12 нитей маховика 1 пули, которые либо перебивают нить и отсоединяют тем самым участок нити, который летит в нужном направлении и создает реактивную тягу.
Либо нить сталкивается с пулей, и в результате столкновения место соединения участка нити с другой частью нити нагревается, в нем значительно уменьшается прочность на разрыв, и участок нити за счет центробежной силы отсоединяется, летит в нужном направлении и создает реактивную тягу.
Снизу маховика может быть выполнен криостат, при этом внутри криостата выполнена структура, содержащая, по крайней мере, два сверхпроводящих слоя, разделенных диэлектриком, причем структура выполнена под маховиком в виде кольца.
Сверхпроводящий слой содержит сверхпроводящую керамику. Например, высокотемпературную сверхпроводящую керамику.
Снизу маховика может быть выполнен криостат, при этом внутри криостата выполнена система структур со сверхпроводящими слоями, разделенных диэлектриком, содержащая, по крайней мере, два элемента, причем элемент содержит структуру, содержащую, по крайней мере, два слоя сверхпроводника, разделенных диэлектриком, при этом система соединена с системой изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком, и выполнена с возможностью дистанционного управления, при этом система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком, выполнена с возможностью получать электрическое питание либо от аккумулятора, либо от генератора, выполненных с возможностью вырабатывать электроэнергию при вращении маховика, при этом система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком, выполнена с возможностью располагать элементы системы структур со сверхпроводящими слоями, разделенных диэлектриком, так, что сверхпроводящие слои соединяются в кольца, расположенные снизу маховика, а также выполнена с возможностью располагать элементы так, что сверхпроводящие слои не соединяются в кольца.
Детальные описания этого элемента и работы этого элемента приведены в опубликованном, выданном патенте на изобретение автора [3].
Кроме того, описание структур есть и в другом опубликованном, выданном патенте на изобретение автора [13].
Снизу маховика выполнен двойной криостат, который состоит из двух частей. Внутренняя часть содержит криостат с жидким гелием, помещенный во внешнюю часть, содержащий криостат с жидким азотом. Внутри криостата выполнена система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком с высоким удельным электрическим сопротивлением.
При этом система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком с высоким удельным электрическим сопротивлением, выполнена с возможностью управляться дистанционно, например с помощью радио, и электрически запитываться либо аккумулятором, соединенным с ней, либо генератором, соединенным с ней и вырабатывающим электроэнергию при вращении маховика.
При этом система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком с высоким удельным электрическим сопротивлением, располагает элементы системы структур со сверхпроводящими слоями, разделенных диэлектриком с высоким удельным электрическим сопротивлением, так, что сверхпроводящие слои в одном положении соединяются в кольца, расположенные снизу маховика, а в другом положении элементы разъединяются и кольца не образуются. Например, эта система выполнена с возможностью складывать элементы системы - структуры в виде гармошки или устанавливать их в виде стопки один над другим.
При этом диск или кольцо содержит структуру, содержащую 50 слоев сверхпроводника, разделенных диэлектриком с высоким удельным электрическим сопротивлением (электрическим изолятором), или более 50 слоев сверхпроводника, разделенных диэлектриком с высоким удельным электрическим сопротивлением.
Такая система структур со сверхпроводящими слоями может быть взята как элемент из электромагнитного двигателя Богданова для создания тяги на новых физических принципах, на который получен патент [13], который содержит либо диск, либо кольцо и систему вращения диска или кольца, выполненную с возможностью вращения диска или кольца, при этом кольцо или диск выполнены внутри криостата, причем криостат выполнен с возможностью вращаться вместе с кольцом.
Кроме того, описание структур есть и в другом опубликованном, выданном патенте на изобретение автора [3].
Снизу маховика выполнен двойной криостат, который состоит из двух частей. Внутренняя часть содержит криостат с жидким гелием, помещенный во внешнюю часть, содержащий криостат с жидким азотом. Внутри криостата выполнена система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком с высоким удельным электрическим сопротивлением (электрическим изолятором).
При этом система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком с высоким удельным электрическим сопротивлением, управляется дистанционно, например с помощью радио, и электрически запитывается либо аккумулятором, соединенным с ней, либо генератором, соединенным с ней и вырабатывающим электроэнергию при вращении маховика.
При этом система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком с высоким удельным электрическим сопротивлением, при взлете и при полете вблизи поверхности небесного тела располагает элементы системы структур со сверхпроводящими слоями так, что сверхпроводящие слои соединяются в кольца, расположенные снизу маховика.
Это дополнение работает следующим образом.
Диск или кольцо вращают структуру, содержащую 50 слоев сверхпроводника, разделенных диэлектриком с высоким удельным электрическим сопротивлением (электрическим изолятором), или более 50 слоев сверхпроводника, разделенных диэлектриком с высоким удельным электрическим сопротивлением.
Во время вращения диска или кольца, содержащего 50 слоев сверхпроводника, разделенных изолятором, или более 50 слое сверхпроводника, разделенных изолятором, над каждым слоем сверхпроводника наблюдается уменьшение веса на 2 процента. Это явление нашло экспериментальное подтверждение [14, 15, 16]. При этом над двумя слоями вращающегося сверхпроводника наблюдается уменьшение веса на 4 процента, что также нашло экспериментальное подтверждение [14, 15, 16].
Таким образом, над всеми 50 слоями вращающегося сверхпроводника наблюдается полное уменьшение веса, что позволяет уменьшить затраты энергии при выведении на орбиту (или при полете на другое небесное тело) расположенного над вращающимися структурами со слоями сверхпроводника полезного груза.
Этот эффект уменьшения веса над вращающейся структурой со сверхпроводящими слоями, разделенными диэлектриком с высоким электрическим сопротивлением, является дополнительным эффектом в работе инерционного движителя, который можно использовать в его работе, а можно и не использовать в его работе.
Такая система структур со сверхпроводящими слоями может быть взята как элемент из электромагнитного двигателя Богданова для создания тяги на новых физических принципах, на который получен патент [13], который содержит либо диск, либо кольцо и систему вращения диска или кольца, выполненную с возможностью вращения диска или кольца, при этом кольцо или диск выполнены внутри криостата, причем криостат выполнен с возможностью вращаться вместе с кольцом.
Кроме того, описание структур и описание их работы есть и в другом опубликованном, выданном патенте на изобретение автора [3].
При посадке, наоборот, система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком с высоким удельным электрическим сопротивлением, изменяет положение элементов так, что кольца из соединенных сверхпроводящих слоев структур не образуются. Например, складывает элементы системы - структуры в виде гармошки или устанавливает их в виде стопки один над другим. В этом случае эффект уменьшения веса над вращающейся структурой со сверхпроводящими слоями, разделенными диэлектриком с высоким электрическим сопротивлением, не образуется, и посадка осуществляется без противодействия указанного эффекта.
Это устраняет указанный выше недостаток электромагнитного двигателя Богданова для создания тяги на новых физических принципах [13], которым является тот факт, что не предусмотрен эффективный механизм, снимающий действие уменьшения гравитации над вращающимся сверхпроводником без выведения его из сверхпроводящего состояния или без выведения его из вращения. Устранение недостатка позволяет осуществлять посадку без противодействия указанного эффекта во время посадки летательного аппарата с движителем, несущего такую вращающуюся структуру.
Это устраняет другой указанный выше недостаток электромагнитного двигателя Богданова для создания тяги на новых физических принципах, которым является тот факт, что не предусмотрен эффективный механизм быстрого снятия и восстановления уменьшения гравитации над вращающимся сверхпроводником без выведения его из сверхпроводящего состояния или без выведения его из вращения с новым созданием ситуации, когда сверхпроводник вращается в сверхпроводящем состоянии. Устранение недостатка позволяет многократное повторение сочетаний взлета и посадки летательного аппарата с таким движителем.
Следующее дополнение.
Инерционный движитель может содержать зарядное устройство, выполненное с возможностью на выходе из маховика, например на выходе из окна 10, заряжать участок нити электрическим зарядом определенного знака, при этом с зарядным устройством соединено устройство изменения направления движения участка нити после отделения, содержащее систему электродов, при этом система электродов содержит, по крайней мере, два электрода.
С возможностью изменения направления вылета отделенного участка нити могут быть выполнены устройства из электронной, ионной и плазменной оптики.
Также вместо электродов могут использовать магнитные катушки и устройство пуска вдоль одного или двух отсоединенных участков нити электрического тока. Катушки могут быть сверхпроводящими.
Также на выходе из окна 10 может быть выполнена плазмооптическая система со скрещенными электрическими и магнитными полями.
Работа всех элементов согласовывается и управляется бортовым компьютером.
Это дополнение работает следующим образом.
Для изменения направления полета инерционного движителя изменяют направление вылета отделенного участка нити. Для этого используют способы из электронной и ионной оптики. В этом случае изменение направления потока ускоренного рабочего тела в виде отделенного участка нити осуществляют следующим образом.
В этом случае зарядное устройство на выходе из маховика, например на выходе из окна 10, заряжает ускоренное рабочее тело в виде отделенного участка нити электрическим зарядом определенного знака. Затем ускоренное рабочее тело направляют в зазор между двумя электродами устройства изменения направления потока ускоренного рабочего тела, на электроды подают электрическое напряжение, и электрическим полем отклоняют обладающее определенным электрическим зарядом ускоренное рабочее тело в нужном направлении. При этом используют пару маховиков, ускоренное рабочее тело которых электрически заряжают электрическими зарядами разных знаков. Создают две примерно параллельные струи ускоренного рабочего тела, которые заряжены электрическими зарядами противоположных знаков, притягиваются после выхода из движителя друг к другу, сталкиваются друг с другом и электрически нейтрализуются. В этом способе нужен импульсный режим работы, поскольку при встрече потоков потечет электрический ток и заряды нейтрализуются.
В другом способе вместо электродов могут использовать магнитные катушки. В этом случае в качестве ускоряемого рабочего тела используют проводящий отделенный участок нити, например нить делают из графена.
Вдоль двух потоков ускоренного рабочего тела пускают электрический ток, который отклоняют магнитным полем катушек, пуская потоки в нужном направлении. Катушки могут быть сверхпроводящими.
В третьем способе поток рабочего тела отклоняют скрещенными электрическими и магнитными полями.
Работа всех элементов согласовывается и управляется бортовым компьютером.
Инерционный движитель выполнен с возможностью соединения с летательным аппаратом. В этом случае движитель ускоряет летательный аппарат.
Использование инерционного движителя Богданова в энергетической системе страны.
Инерционный движитель может быть выполнен с возможностью соединения с тепловой электростанцией, содержащей котел, причем предусмотрена возможность отделения от маховика участка нити таким образом, чтобы участок нити после отделения сталкивался с котлом тепловой электростанции и нагревал котел тепловой электростанции.
Инерционный движитель может быть выполнен с возможностью соединения с тепловой электростанцией, причем предусмотрена возможность отделения от маховика участка нити таким образом, чтобы участок нити после отделения сталкивался с топливом тепловой электростанции и нагревал топливо тепловой электростанции.
В этих случаях отделяют участок нити от маховика таким образом, чтобы он после вылета сталкивался бы либо с котлом, либо с топливом. И нагревал бы столкновением либо котел тепловой электростанции, либо топливо тепловой электростанции.
В этих случаях инерционный движитель заряжают энергией путем приведения маховика во вращение около источника энергии, выполненного далеко от потребителя энергии. Например, около геотермальной электростанции, выполненной около вулкана, атомной электростанции, гидроэлектростанции и так далее.
Движитель могут использовать для переноса энергии, накопленной во вращающихся маховиках от электростанций, выполненных около источников энергии, или от самих источников энергии до электростанций, выполненных около потребителей энергии, или до самих потребителей энергии. Источниками энергии могут быть месторождения газа, нефти, угля, геотермальные источники. А также вулканы.
В этом случае маховики движителя могут запитывать энергией от электростанций, выполненных около источников энергии, или от самих источников энергии.
Например, строят электростанции там, где есть месторождения газа, нефти, угля, геотермальные источники или вулканы.
В другом варианте электростанции могут транспортировать летательные аппараты с инерционным движителем Богданова. Для этого, в простейшем варианте, электростанция содержит котел с установленным сверху генератором. Котел установлен на треножнике, высота которого немного выше высоты трубы, на которой сжигают попутный газ. Треножник с котлом устанавливают над трубой, в которой сжигают попутный газ. Горящий газ нагревает котел, вода кипит, вращает турбину генератора, и электростанция вырабатывает электроэнергию. Воду в котел направляют насосом по шлангу из ближайшего водоема.
В другом варианте котел с установленным сверху генератором опускают в жерло вулкана. Вулкан нагревает котел, вода кипит, вращает турбину генератора, и электростанция вырабатывает электроэнергию. Воду в котел также направляют насосом по жаропрочному шлангу, выполненному из огнестойких материалов, из ближайшего водоема. Причем в случае если уровень лавы ниже уровня воды в ближайшем водоеме, то вода только сначала направляется насосом, а затем течет в котел сама по закону сообщающихся сосудов.
Вырабатывают дешевую электрическую энергию. Запитывают этой дешевой электрической энергией маховики инерционного движителя Богданова и переносят летательным аппаратом с этим движителем запасенную энергию к потребителям энергии. Там запасенную энергию перераспределяют. Например, через установленный в электростанции инерционный движитель Богданова могут пропускать воду, воздух или природный газ и нагревать их вылетающим из маховиков с большой скоростью рабочим телом.
Вода нагревается, кипит, образуется пар, пар вращает турбину электростанции, электростанция вырабатывает электроэнергию. В другом случае нагретый воздух или природный газ увеличивают температуру горения топлива и дают дополнительную теплоту для выработки электроэнергии. Кроме того, нагретую воду могут использовать в системах парового или водяного отопления городов.
Полученной электроэнергией могут запитывать другие инерционные движители Богданова для повторения процесса.
Такой способ переноса энергии для России даст значительную прибыль за счет следующих факторов.
1. Даст экономию энергии за счет отсутствия транспортных потерь энергии при ее передаче по проводам на значительное расстояние.
2. Ускорит передачу энергии за счет того, что не надо долго строить длинную линию электропередач, а можно за это же время быстро перенести летательными аппаратами с инерционным движителем Богданова значительное количество энергии.
Кроме того, если рассматривать всю совокупность технико-экономических параметров такого способа переноса и распределения энергии на основе инерционного движителя Богданова, то можно сказать следующее.
На его основе может быть создан грандиозный Проект изменения всей энергетической системы страны, который принесет пользу и будет иметь преимущества по следующим параметрам.
1. Стране - громадная прибыль от освоения удаленных нефтегазовых месторождений. В том числе арктических. Согласитесь, освоение арктического шельфа уже является приоритетной государственной задачей. Значит - это еще один повод дать карт-бланш данному Проекту!!!
2. Решение проблемы попутного газа на всех нефтяных месторождениях - если его нельзя транспортировать, его можно просто сжигать в топках газовых электростанций.
3. Решение проблемы изношенности линий электропередач. Энергия переносится не по ним, а в маховиках, усиленных углеродными нанотрубками.
4. Явная польза и прямая выгода в том, что, во-первых, нет потерь энергии в линиях электропередач. Во-вторых, не нужно делать просеки в дремучей тайге, не надо на пути линий электропередач осушать болота в Сибири и в тундре, не надо тянуть линии электропередач через широкие реки и таежные горные хребты.
5. Нет отчуждения территории под линии электропередач в том случае, когда они проходят через поля и города - через территории, так или иначе вовлеченные в народное хозяйство.
6. Есть возможность демонтировать изношенные линии электропередач, а на их территории возвести элитные поселки. Землю из-под изношенных линий электропередач можно продать и получить прибыль.
7. Есть возможность получить дополнительную прибыль от нерентабельных сегодня месторождений. Например, от шельфовых. И сделать их за счет этого рентабельными.
8. В условиях мирового кризиса Проект обеспечит России создание новых рабочих мест и не позволит развиться массовой безработице.
9. Известно, что в маховиках удельная плотность накопленной энергии растет с ростом размеров. А значит, с ростом размеров системы удельная плотность энергии будет на порядки превосходить удельную плотность энергии и в нефти и в сжиженном газе. Даже на многие порядки!!! А это - прямая выгода в транспортировке энергии.
Следующее дополнение.
Инерционный движитель может содержать ракету, при этом предусмотрена возможность направлять участок нити таким образом, чтобы участок нити после отделения сталкивался с пламенем двигателя ракеты и нагревал пламя двигателя ракеты.
В этом случае движитель просто нагревает пламя ракеты. И тем самым увеличивает скорость вылета рабочего тела ракеты. Тем самым увеличивая тягу.
Следующее дополнение.
Инерционный движитель может содержать ракетный движитель, выполненный с возможностью ускорять рабочее тело, при этом предусмотрена возможность направлять участок нити таким образом, чтобы участок нити после отделения от маховика сталкивался с рабочим телом движителя и нагревал рабочее тело движителя.
В этом случае инерционный движитель просто нагревает рабочий тело ракетного движителя. И тем самым увеличивает скорость вылета рабочего тела ракетного движителя. Тем самым увеличивая тягу.
Следующие дополнения.
Нить может быть либо полностью выполнена из кевлара, либо армирована кевларом. Это увеличивает прочность нити.
Нить может быть либо полностью выполнена из синтетического волокна, либо армирована синтетическим волокном. Это увеличивает прочность нити.
Нить может быть либо полностью выполнена из углеродных нанотрубок, либо армирована углеродными нанотрубками. Это увеличивает прочность нити.
Нить может быть либо полностью выполнена из графена, либо армирована графеном. Это увеличивает прочность нити.
Нить может быть либо полностью выполнена из кварцевых волокон, либо армирована кварцевыми волокнами. Это увеличивает прочность нити.
Нить может быть либо полностью выполнена из углепластика, либо армирована углепластиком. Это увеличивает прочность нити.
Нить может быть либо намотана на маховик, либо инерционный движитель содержит нить, содержащий участок нити, выполненный с возможностью во время вращения маховика находиться в положении, при котором участок параллелен прямой линии, перпендикулярной оси вращения и проходящей через ось вращения.
В этом случае система отделения участка ними отсоединяет участок нити так же, как и в основном варианте.
Маховик может содержать пучок нитей, содержащий, по крайней мере, две нити, закрепленные держателем пучка нитей, выполненным в центре маховика так, чтобы огибающая концов нитей, лежащая в плоскости вращения маховика, вращалась вокруг центра масс держателя.
В этом случае система отделения участка нити отсоединяет участок нити так же, как и в основном варианте.
Следующее дополнение.
В устройствах приведения во вращение маховика проводящие пластины может заряжать высоковольтный генератор с помощью коронирующих электродов. С помощью высоковольтного генератора на коронирующие электроды подают электрический разряд, и с них начинается электронная эмиссия. Положительный заряд на проводящей пластине создают, если коронирующие электроды выполнены на проводящей пластине, а напряжение подают так, что с коронирующих электродов вызывают эмиссию электронов и заряжают пластину тем самым положительным зарядом. Отрицательный заряд на пластине создают, если коронирующие электроды выполнены вне проводящей пластины напротив нее на другой стороне межэлектродного зазора. На зазор подают разность потенциалов, с коронирующих электродов идет электронная эмиссия, электроны вылетают с коронирующих электродов и поступают на проводящую пластину. И тем самым заряжают пластину отрицательным зарядом.
Высоковольтный генератор может подавать высокое напряжение также на электроды устройства приведения во вращение маховика с большой частотой за счет модулятора, содержащего вращаемый диск с чередующимися электрически изолированными друг от друга проводящими пластинами, на одних из которых есть коронирующие электроды, а на других - нет. При этом вращаемый диск вращают между двумя неподвижными дисками также с электрически изолированными друг от друга проводящими пластинами, на одних из которых есть коронирующие электроды, а на других - нет. На проводящие пластины неподвижных дисков подают высокое напряжение, вызывают электронную эмиссию и создают на пластинах вращаемого диска электрические заряды, которые с него подают на проводящие пластины, и с их помощью вращают кольцо 6, соединенное с маховиком 1, как было описано выше.
Следующий вариант.
В устройствах приведения во вращение маховика проводящие пластины может заряжать высоковольтный генератор, выполненный внутри кольца. Например, генератор Ван дер Графа. Этот генератор вращает ленту между двумя проводящими пластинам. При этом с одной пластины лента снимает отрицательный заряд и создает на ней тем самым избыточный положительный заряд. На другую проводящую пластину лента, наоборот, отрицательный заряд наносит и создает на ней избыточный отрицательный заряд.
Энергию для перемещения ленты и для работы других элементов высоковольтного генератора дает либо система с аккумулятором, либо истема с генератором, вырабатывающим электроэнергию при вращении маховика или кольца, соединенного с маховиком.
Следующий вариант.
Кольцо 6 и вал 5, соединенные с маховиком 1, выполнены полностью из синтетических волокон или армированы синтетическими волокнами.
Кольцо и вал, соединенные с маховиком, выполнены полностью из углеродных нанотрубок или армированы углеродными нанотрубками.
Это упрочняет элементы движителя.
Следующий вариант.
Инерционный движитель Богданова может содержать более одного маховика, выполненного с одной осью вращения параллельно друг другу. При этом корпус имеет цилиндрическую оболочку с окнами для каждого маховика для вылета рабочего тела в виде отделенных участков нитей. При этом с корпусом соединено более одной системы отделения участка нити.
Этот вариант работает так же, как и первый вариант с тем отличием, что возможно одновременное отделение всеми маховиками отделенных участков нитей. Нити могут отделяться в одном направлении для создания тяги и в разных направлениях для поворота двигателя.
Летательный аппарат с таким инерционным движителем Богданова, выполненным в виде большого цилиндра, может переносить при полете на другие небесные тела в своем ангаре другие более мелкие летательные аппараты, выполненные в виде летательных аппаратов с движителем Богданова по первому варианту описания изобретения. Таким образом, летательный аппарат с инерционным движителем Богданова в виде цилиндра становится кораблем-маткой для более мелких летательных аппаратов с движителем Богданова по первому варианту описания изобретения.
Инерционный движитель Богданова, выполненный в виде цилиндра большого размера, может создавать наибольшую тягу из всех вариантов, поскольку вдоль боковой поверхности цилиндра можно разместить наибольшее количество маховиков, приходящихся на единицу поверхности летательного аппарата.
Таким образом, инерционный движитель Богданова, выполненный в виде цилиндра большого размера, становится идеальным вариантом движителя корабля-матки, приспособленного для переноса на другие небесные тела более мелких летательных аппаратов с движителем Богданова, выполненным по первому варианту описания изобретения.
Следующий вариант.
В летательных аппаратах инерционные движители Богданова целесообразно использовать парами, чтобы пары маховиков разных движителей, вращающихся в противоположных направлениях, гасили возникающий момент вращения. Можно использовать либо одну пару маховиков, либо несколько пар маховиков.
Источники информации
1. Советский энциклопедический словарь. Издательство «Советская Энциклопедия», Москва, 1980 г., стр.498.
2. Бурдаков В.П., Данилов Ю.И. Физические проблемы космической тяговой энергетики. Москва, Атомиздат, 1969 г., стр.37.
3. Богданов И.Г. Инерционный двигатель Богданова. Патент №2449170. Зарегистрирован в государственном реестре изобретений Российской Федерации 27 апреля 2012 года. Заявка №2010134520. Приоритет изобретения 19 августа 2010 г.
4. Космические движители: состояние и перспективы. Под редакцией Кейвни Л. Москва, Мир, 1988, стр.415.
5. Популярная механика №2, 2010 год, стр.42.
6. Богданов К. Ю. Как можно вычислить прочность углеродной нанотрубки, 20 марта 2009.
http://www.nanometer.ru/2009/03/19/nanotubes_145296.html
7. http://tarefer.ru/
23. www.chemnet. ru/rus/jvho/2001 -2/56. pdf
8. http://works.tarefer.ru/94/100071 /index.html
9. http://e-science.ru/index/?id=4630
10. Нанотрубки для космического лифта, РБК daily, понедельник 26 января 2009 года, №11 (574), стр.11.
11. Большая советская энциклопедия,
http://slovari.yandex.ru/dict/bse/article/00026/42300.htm
12. Физическая энциклопедия, 1998 г., т.5, стр.249.
13. Электромагнитный двигатель Богданова для создания тяги на новых физических принципах. Патент №2200875. Заявка №2000112072.
Приоритет 17.05.2000.
14. Статья на тему «Научные исследования». Российские ученые открыли антигравитацию. © 2008 ScienceArt.Ru
http://scienceart.ru/researches/rossiyskie_uchenie_otkrili_antigravitaeiyu.html
15. Вентура Тим. Секрет Антигравитации. Новая Энергетика №3(1 8), 2004 года, стр.88.
16. Фролов А. В. Современные антигравитационные исследования. Новая Энергетика №4 (19), 2004 года, стр.71.









Изобретение относится к инерционным движителям, выполненным с возможностью создания реактивной тяги. Инерционный движитель содержит маховик, причем маховик содержит рабочее тело. Предусмотрена возможность вывода из маховика рабочего тела таким образом, чтобы на выходе из движителя рабочее тело двигалось в заданном направлении. Маховик в качестве рабочего тела содержит, по крайней мере, одну нить, а движитель содержит систему отделения от маховика участка нити. Системой предусмотрена возможность отделения от вращающегося маховика за счет центробежной силы участка нити таким образом, чтобы на выходе из движителя участок нити за счет центробежной силы отсоединялся от маховика, и отделенный участок нити, обладающий в момент отделения линейной скоростью вращения, после отделения с этой скоростью прямолинейного поступательного движения отделялся от движителя и создавал реактивную тягу. 34 з.п. ф-лы, 13 ил.
1. Инерционный движитель, содержащий маховик, причем маховик содержит рабочее тело, и при этом предусмотрена возможность вывода из маховика рабочего тела таким образом, чтобы на выходе из движителя рабочее тело двигалось в заданном направлении, отличающийся тем, что маховик в качестве рабочего тела содержит, по крайней мере, одну нить, а движитель содержит систему отделения от маховика участка нити, причем системой предусмотрена возможность отделения от вращающегося маховика за счет центробежной силы участка нити таким образом, чтобы на выходе из движителя участок нити за счет центробежной силы отсоединялся от маховика, и отделенный участок нити, обладающий в момент отделения линейной скоростью вращения, после отделения с этой скоростью прямолинейного поступательного движения отделялся от движителя и создавал реактивную тягу.
2. Инерционный движитель по п.1, отличающийся тем, что система отделения от маховика участка нити содержит лазер.
3. Инерционный движитель по п.1, отличающийся тем, что маховик содержит пучок нитей, содержащий, по крайней мере, две нити, и держатель пучка нитей.
4. Инерционный движитель по п.1, отличающийся тем, что содержит устройство приведения во вращение маховика, при этом устройство приведения во вращение маховика содержит кольцо и трубу, соединяющую маховик и кольцо, причем сверху и снизу кольца выполнен ускоряющий зазор, образованный срезами двух расположенных вокруг кольца и обращенных друг к другу электродов, имеющих форму полых полуцилиндров, причем электроды выполнены с возможностью присоединения к генератору.
5. Инерционный движитель по п.1 или 4, отличающийся тем, что на кольце выполнена дистанционно управляемая система с аккумулятором, электрически соединенная, по крайней мере, с двумя электрически изолированными друг от друга проводящими пластинами, выполненными с противоположных сторон кольца напротив друг друга, при этом аккумулятор системы с аккумулятором выполнен с возможностью электрически заряжать, по крайней мере, две проводящие пластины зарядами противоположных знаков.
6. Инерционный движитель по п.1, отличающийся тем, что содержит систему с генератором, выполненным с возможностью вырабатывать электрическую энергию при вращении маховика или кольца, соединенного с маховиком.
7. Инерционный движитель по п.1, отличающийся тем, что содержит магнитный подвес, выполненный с возможностью удерживать на весу маховик во время вращения маховика.
8. Инерционный движитель по п.1, отличающийся тем, что содержит магнитный подвес, выполненный с возможностью удерживать на весу маховик во время вращения маховика, и при этом магнитный подвес содержит сверхпроводящий магнит.
9. Инерционный движитель по п.1, отличающийся тем, что с маховиком соединена система магнитных шарикоподшипников, содержащих, по крайней мере, два шарикоподшипника, причем маховик соединен с системой шарикоподшипников с возможностью свободного вращения.
10. Инерционный движитель по п.1, отличающийся тем, что система отделения от маховика участка нити содержит ускоритель электронов.
11. Инерционный движитель по п.1, отличающийся тем, что система отделения от маховика участка нити содержит пулемет.
12. Инерционный движитель по п.1, отличающийся тем, что снизу маховика выполнен криостат, при этом внутри криостата выполнена структура, содержащая, по крайней мере, два сверхпроводящих слоя, разделенных диэлектриком, причем структура выполнена под маховиком в виде кольца.
13. Инерционный движитель по п.1 или 12, отличающийся тем, что сверхпроводящий слой содержит сверхпроводящую керамику.
14. Инерционный движитель по п.1, отличающийся тем, что снизу маховика выполнен криостат, при этом внутри криостата выполнена система структур со сверхпроводящими слоями, разделенных диэлектриком, содержащая, по крайней мере, два элемента, причем элемент содержит структуру, содержащую, по крайней мере, два слоя сверхпроводника, разделенных диэлектриком, при этом система соединена с системой изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком, и выполнена с возможностью дистанционного управления, при этом система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком, выполнена с возможностью получать электрическое питание либо от аккумулятора, либо от генератора, выполненных с возможностью вырабатывать электроэнергию при вращении маховика, при этом система изменения положения элементов системы структур со сверхпроводящими слоями, разделенных диэлектриком, выполнена с возможностью располагать элементы системы структур со сверхпроводящими слоями, разделенных диэлектриком, так, что сверхпроводящие слои соединяются в кольца, расположенные снизу маховика, а также выполнена с возможностью располагать элементы так, что сверхпроводящие слои не соединяются в кольца.
15. Инерционный движитель по п.1, отличающийся тем, что содержит зарядное устройство, выполненное с возможностью на выходе из маховика заряжать участок нити электрическим зарядом определенного знака, при этом с зарядным устройством соединено устройство изменения направления движения участка нити после отделения, содержащее систему электродов, при этом система электродов содержит, по крайней мере, два электрода.
16. Инерционный движитель по п.1, отличающийся тем, что выполнен с возможностью соединения с летательным аппаратом, при этом предусмотрена возможность соединения с летательным аппаратом пары инерционных движителей с маховиками, при этом предусмотрено обеспечение возможности вращения маховиков в противоположных направлениях.
17. Инерционный движитель по п.1, отличающийся тем, что выполнен с возможностью соединения с тепловой электростанцией, содержащей котел, причем предусмотрена возможность отделения от маховика участка нити таким образом, чтобы участок нити после отделения сталкивался с котлом тепловой электростанции и нагревал котел тепловой электростанции.
18. Инерционный движитель по п.1, отличающийся тем, что содержит ракету, при этом предусмотрена возможность направлять участок нити таким образом, чтобы участок нити после отделения сталкивался с пламенем движителя ракеты и нагревал пламя движителя ракеты.
19. Инерционный движитель по п.1, отличающийся тем, что содержит ракетный движитель, выполненный с возможностью ускорять рабочее тело, при этом предусмотрена возможность направлять участок нити таким образом, чтобы участок нити после отделения от маховика сталкивался с рабочим телом движителя и нагревал рабочее тело движителя.
20. Инерционный движитель по п.1, отличающийся тем, что содержит корпус с вакуумированным объемом, снабженный средствами вакуумной откачки, при этом в корпусе выполнено окно для вылета участка нити.
21. Инерционный движитель по п.1, отличающийся тем, что нить либо полностью выполнена из кевлара, либо армирована кевларом.
22. Инерционный движитель по п.1, отличающийся тем, что нить либо полностью выполнена из синтетического волокна, либо армирована синтетическим волокном.
23. Инерционный движитель по п.1, отличающийся тем, что нить либо полностью выполнена из углеродных нанотрубок, либо армирована углеродными нанотрубками.
24. Инерционный движитель по п.1, отличающийся тем, что нить либо полностью выполнена из графена, либо армирована графеном.
25. Инерционный движитель по п.1, отличающийся тем, что нить либо полностью выполнена из кварцевых волокон, либо армирована кварцевыми волокнами.
26. Инерционный движитель по п.1, отличающийся тем, что нить либо полностью выполнена из углепластика, либо армирована углепластиком.
27. Инерционный движитель по п.1, отличающийся тем, что маховик содержит пучок нитей, содержащий, по крайней мере, две нити, закрепленные держателем нити, соединенным с валом, соосным оси вращения маховика.
28. Инерционный движитель по п.1, отличающийся тем, что нить либо намотана на маховик, либо инерционный движитель содержит нить, содержащий участок нити, выполненный с возможностью во время вращения маховика находиться в положении, при котором участок параллелен прямой линии, перпендикулярной оси вращения и проходящей через ось вращения.
29. Инерционный движитель по п.1, отличающийся тем, что содержит корпус с вакуумированным объемом, снабженный средствами вакуумной откачки, при этом в корпусе выполнено окно для вылета участка нити, выполненное с возможностью герметично закрываться и отрываться, при этом маховик содержит пучок нитей, содержащий, по крайней мере, две нити, закрепленные держателем пучка нитей, соединенным с валом, соосным оси вращения маховика, при этом вал соединен с системой приведения маховика во вращение, причем вал либо подвешен в корпусе на магнитном подвесе, либо соединен с корпусом магнитными шарикоподшипниками, при этом вал, держатель пучка нитей, пучок нитей, система отделения участка нити и система приведения маховика во вращение выполнены в вакуумированном объеме внутри корпуса.
30. Инерционный движитель по п.1, отличающийся тем, что маховик содержит пучок нитей, содержащий, по крайней мере, две нити, закрепленные держателем пучка нитей, выполненным в центре маховика так, чтобы огибающая концов нитей, лежащая в плоскости вращения маховика, вращалась вокруг центра масс держателя.
31. Инерционный движитель по п.1, отличающийся тем, что выполнен с возможностью соединения с тепловой электростанцией, причем предусмотрена возможность отделения от маховика участка нити таким образом, чтобы участок нити после отделения сталкивался с топливом тепловой электростанции и нагревал топливо тепловой электростанции.
32. Инерционный движитель по п.1, отличающийся тем, что содержит, по крайней мере, два маховика, выполненных с одной осью вращения параллельно друг другу, при этом корпус имеет цилиндрическую оболочку с окнами для каждого маховика для вылета рабочего тела в виде отделенных участков нитей, причем с корпусом соединены, по крайней мере, две системы отделения участка нити.
33. Инерционный движитель по п.1 или 3, отличающийся тем, что система отделения участка нити содержит лазер, при этом предусмотрена возможность направлять лазерный луч, по крайней мере, на два участка пучка нитей маховика вдоль длины нити с шагом, равным длине отделяемого участка нити, причем предусмотрена возможность направлять луч лазера импульсами.
34. Инерционный движитель по п.1, отличающийся тем, что нить имеет прямоугольное поперечное сечение.
35. Инерционный движитель по п.1, отличающийся тем, что маховик содержит пучок нитей, содержащий, по крайней мере, две нити, закрепленные держателем нити, причем нить выполнена прямоугольного сечения, при этом в пучке выполнены, по крайней мере, два параллельных слоя нитей, перпендикулярных оси вращения маховика, причем нити в слое скреплены друг с другом, при этом вне части пучка, сжатой держателем, предусмотрена возможность отделения части одного слоя нитей от другого слоя.
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ БОГДАНОВА | 2010 |
|
RU2449170C1 |
| ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ | 1997 |
|
RU2120061C1 |
| ДВИГАТЕЛЬ-РАКЕТА | 1998 |
|
RU2198320C2 |
| US 20100251691 A1, 07.10.2010 | |||
| US 20100199632 A1, 12.08.2010 | |||
| JP 2008309054 A, 25.12.2008 | |||

