Изобретение относится к строительству, в частности к контролю степени уплотнения насыпных строительных грунтов при возведении оснований и фундаментов жилых и административных зданий и сооружений, гидротехнических плотин, траншей магистральных трубопроводов, насыпей автомобильных и железных дорог.
1. Известно (аналог) устройство для контроля степени композиционных смесей SU 1749898А1 [(МПК G06F 15/46, G01N 9/36) от 22.03.1992]. Известный аналог относится к области измерения физико-механических свойств композиционных материалов и может быть использовано в химической, электротехнической и других отраслях промышленности. Известное устройство содержит вибрационный рабочий орган, акселерометр, усилитель, полосовой фильтр, детекторы, алгебраические сумматоры, задатчики амплитуды колебаний и степени уплотнения грунта, компараторы, триггеры и формирователи импульсов.
Недостатком известного аналога является то, что устройство повышает только точность контроля момента времени окончания цикла уплотнения, не исключает снижение эксплуатационной производительности грунтоуплотняющей машины, перерасход горюче-смазочных материалов и затрат, связанных с дополнительным контролем качества уплотнения насыпного грунта с использованием передвижных лабораторий. Обуславливается это тем, что известное устройство является информационным и не имеет возможности управления рабочим органом грунтоуплотняющей машины в зависимости от заданной степени уплотнения грунта и внешних возмущающих воздействий, отрицательно влияющих на качество уплотнения.
2. Известно техническое решение, см. патент №4348901 (МПК G01N 3/36) (ближайший аналог-прототип устройства контроля степени уплотнения грунта, включающее вибрационный рабочий механизм с установленным на нем акселерометром, который через усилитель подключен к основному полосовому фильтру и показывающий степень уплотнения грунта индикатор).
Недостатком известного устройства является низкая точность показаний информационного индикатора в связи с отсутствием возможности оптимальной настройки параметра фильтра в условиях воздействия на объект случайных помех.
3. Например, в известном аналоге по патенту ФРГ №3421824, кл. МКИ G05D 19/00, E01C 19/28 от 19.12.85 «Устройство для контроля эффективности уплотнения грунта виброкатками и виброплитами», содержит датчик ускорений и прибор передачи информационных показаний на индикатор. Недостатком указанного аналога по патенту №3421824, кл. МКИ G05D 19/00 от 19.12.85 является разброс показаний индикаторного прибора, связанных с неоднородностью свойств уплотняемого грунта (гранулометрия, модуль упругости, влажность, неровность поверхности).
4. В известном аналоге по патенту Австрии №385065, кл. МКИ E01C 19/23 от 10.02.88 «Устройство для определения степени уплотнения грунта катком» содержит индукционный датчик, сердечник которого кинематически связан с рабочим механизмом машины, измеритель амплитуды колебаний, фильтры преобразования частот, усилитель напряжения от сигналов датчика и индикатор показаний.
Недостатком известного устройства по патенту №385065, кл. МКИ E01C 19/23 от 10.02.88, как и всех предыдущих, изложенных в настоящем обзоре является то, что они являются по набору технических средств и структуре построения только информационного действия с выводом показаний на индикатор, что не может обеспечить решение основной задачи: повышение эксплуатационной производительности грунтоуплотняющей машины при высоком качестве уплотнения и сокращение затрат при выполнении строительно-монтажных работ.
Задачей настоящего изобретения является совершенствование блока управления путем введения новых технических средств и программного обеспечения, позволяющих автоматически изменять режимы работы грунтоуплотняющей машины.
Целью настоящего изобретения является повышение производительности грунтоуплотняющей машины и сокращение материальных затрат при выполнении строительно-монтажных работ за счет оперативного регулирования параметров работы исполнительного механизма путем автоматического выбора оптимального режима в зависимости от заданной степени уплотнения грунта и внешних возмущающих воздействий: влажности, гранулометрического состава, модуля упругости грунта и неровности уплотняемой поверхности. При этом новое техническое решение устройства автоматического управления рабочим механизмом грунтоуплотняющей машины будет лишено недостатков прототипа и аналогов, выполняющих функции только информационной сигнализации машинисту о выключении грунтоуплотняющей машины по окончании цикла уплотнения.
Эксплуатационная производительность грунтоуплотняющей машины определяется:

где B - ширина полосы уплотнения; b=0,1 (м) - ширина перекрытия смежных полос; VM - скорость перемещения машины в процессе уплотнения (м/час); n - число проходов на одной захватке; KB=0,8-0,85 - коэффициент использования машины (чистое время работы): HO - толщина уплотняемого слоя грунта (м).
Критериями эффективной работы уплотняющей машины являются максимальная производительность при минимальном числе проходов с высокой скоростью передвижения при обеспечении заданной степени уплотнения грунта (Фиг.2). Однако при высокой ПЭ значительно снижается ρф (Фиг 2) и поэтому отсутствует технологическая необходимость максимального обеспечения ПЭ при некачественном уплотнении грунта ρф. Увеличить ПЭ по формуле (1) можно только двумя переменными величинами VM и n, так как величины B, b, HO, KB зависят от технологии уплотнения и не связаны с ρф.
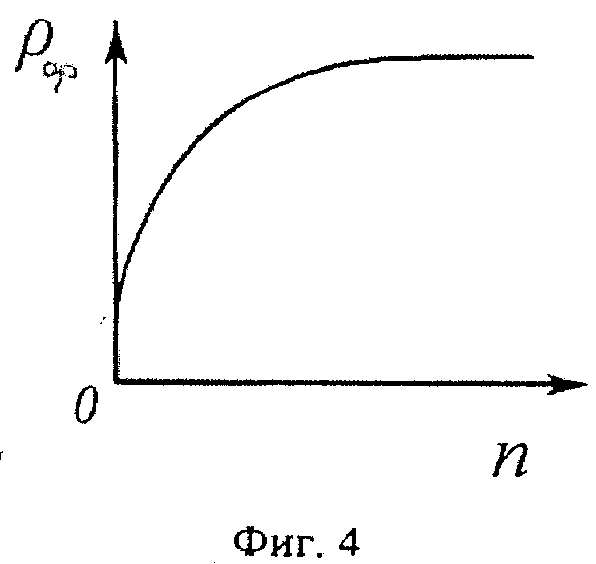
С увеличением VМ растет Пэ, но одновременно снижается ρф (фиг.3), а с уменьшением n увеличиваются ρф (фиг.4) и Пэ, но прямопропорционально снижается время уплотнения ty по (2), что приводит к резкому снижению Пэ за счет длительного времени уплотнения и увеличения проходок n на одной полосе уплотнения
где m - число полос уплотнения; L - длина участка уплотнения (м).
Для оптимизации значений VM, n, ty путем регулирования параметрами Fy, ω, fy по величине и времени их действия предлагается данное изобретение.
Технический эффект изобретения достигается тем, что в устройство введены преобразователи контроля числа проходов машины, скорости ее перемещения, силы и частоты удара рабочего органа, частоты оборотов кривошипного механизма, времени работы машины, на одной полосе уплотнения, многоканальный входной и выходной нормализаторы для связи с объектом управления, бортовой микропроцессорный контроллер с программным обеспечением, регулируемый по нескольким оптимальным параметрам механизм, анализатор сравнения фактической степени уплотнения с заданной, причем первичные преобразователи через многоканальный входной нормализатор сигналов электрически подключен к «Входу 1» микропроцессорного контроллера, на «Вход 2» которого подается сигнал от анализатора сравнения, а с «Выхода» через выходной нормализатор формирует команды для управления регулируемым исполнительным механизмом, кинематически сочлененным с рабочим органом машины.
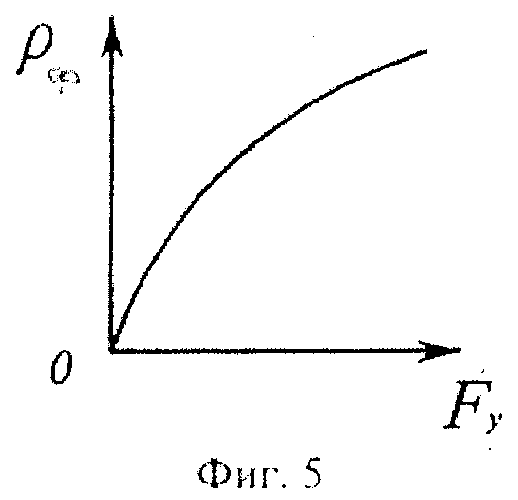
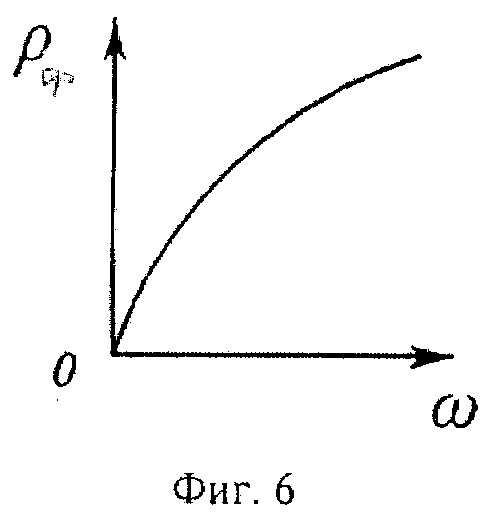
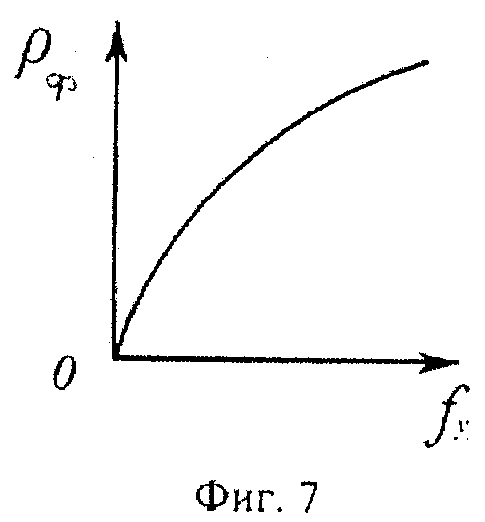
Введение перечисленных новых технических средств в известное устройство совместно с наиболее важным элементом, каким является регулируемый исполнительный механизм, позволяет разработать управляемый технологический процесс уплотнения грунта на базе микропроцессорной техники с гибким программным обеспечением, обеспечивающим регулирование степени уплотнения по следующим параметрам: Fy - сила удара рабочего органа (фиг.5), ω - частота вала кривошипа (изменение частоты вибрации) (фиг.6), fy - частота удара рабочего органа о грунт (фиг.7) и времени работы машины на одной полосе уплотнения ty.
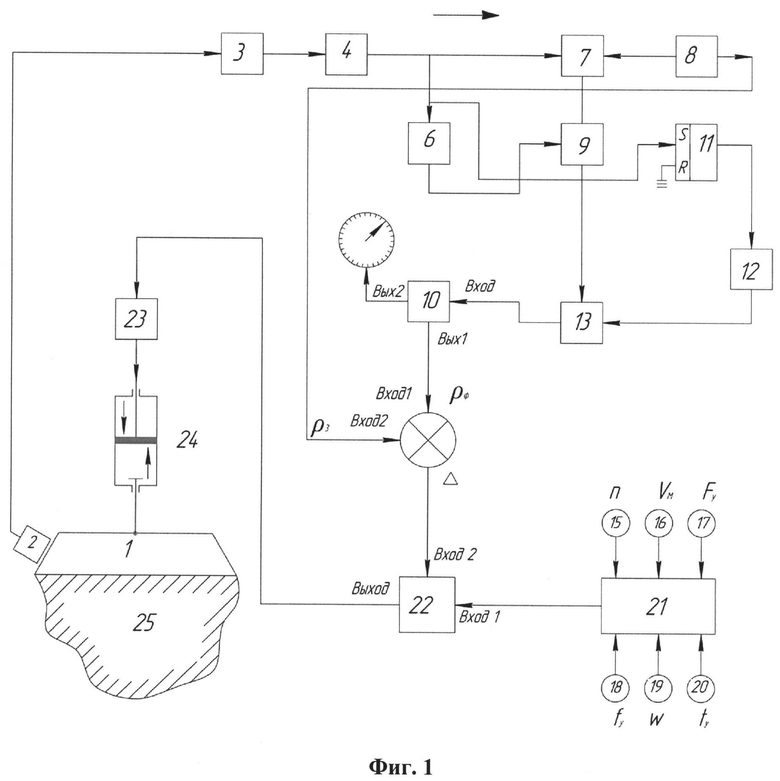
На фиг.1 представлена структурная блок-схема устройства автоматического управления исполнительным механизмом рабочего органа грунтоуплотняющей машины. Устройство автоматического управления исполнительным механизмом рабочего органа грунтоуплотняющей машины содержит вибрационный рабочий орган 1, акселерометр 2, усилитель 3, полосовой фильтр 4, индикатор 5, преобразователь частоты в аналоговый сигнал 6, алгебраический сумматор 7, задатчик степени уплотнения 8, аналого-цифровой преобразователь 9, компаратор 10, триггер 11, формирователь импульса 12, блок памяти 13, анализатор сравнения фактической степени уплотнения с заданной 14, преобразователи контроля числа проходов машины 15, скорости перемещения машины 16, силы удара рабочего органа 17, частоты удара рабочего органа 18, частоты оборотов кривошипного механизма 19, времени работы машины на одной полосе уплотнения 20, многоканальный входной анализатор 21, бортовой микропроцессорный контроллер 22, выходной нормализатор 23 и регулируемый исполнительный механизм 24.
Устройство работает следующим образом
Формирование управляющих сигналов от амплитуд гармонических колебаний, возникающих от воздействия регулируемых параметров: VM, n, τy, Fy, ω, fy по известному устройству происходит следующим образом. При уплотнении насыпного строительного грунта 25 с помощью вибрационного рабочего органа 1 на выходе акселерометра 2 возникает сигнал гармонического вида, близкий к синусоидальному. Этот сигнал, проходя усилитель 3, подается на полосовой фильтр 4, содержащий информацию о процессе уплотнения грунта 25. При этом происходит отстройка этого сигнала как от высокочастотных, так и от низкочастотных помех.
С выхода полосового фильтра 4 полезный сигнал через усилитель 6 подается на преобразователь частоты в аналоговый сигнал 6 и на алгебраический сумматор 7, на вход которого подается сигнал с задатчика 8 амплитуд вибраций, определяющих заданную степень уплотнения грунта. С выхода задатчика 8 этот же сигнал поступает на анализатор 14.
Фиксированный сигнал с задатчика 8, с алгебраического сумматора 7 и с преобразователя частоты в аналоговый сигнал 6 подается на аналого-цифровой преобразователь 9, который на своем выходе вырабатывает код и направляет его в блок памяти 13, а с его выхода на вход компаратора 10, с «Выхода 1» которого кодированный сигнал фиксируется на «Входе 2» анализатора 14. На «Выходе 2» компаратора 10 подключен индикатор 5. Сигнал с полосового фильтра 4 в виде импульсов подается на счетный вход триггера 11, а с него поступает на формирователь импульсов 12, который преобразовывает команды таким образом, что на выходе компаратора возникают прямоугольные импульсы, возникающие от различных гармоник уплотняемого грунта 25.
Для контроля значений сигналов от различных переменных частот, создаваемых регулируемым исполнительным механизмом 24 в управляемом технологическом процессе уплотнения, использовано известное устройство аналога с известной структурой технических средств и связями между ними, которые обеспечивали только нерегулируемый один информационный сигнал с выводом его на индикатор 5.
В управляемом технологическом процессе формируются несколько сигналов от гармонических частот, которые возникают от различных регулируемых параметров и функционально связаны с фактической степенью уплотнения грунта:
ρф=f(VM, n, τy, Fy, ω, fy).
На входе компаратора 10 фиксируется установившееся значение одного контролируемого сигнала, например сигнала амплитуды гармоники, связанной с Fy, который подается на «Вход 1» анализатора сравнения 14, а на «Вход 2» поступает сигнал от задатчика 8, где сравнивается фактическое значение степени уплотнения грунта ρф с заданным ρз.
В случае ρф≠рз вырабатывается сигнал разбаланса Δ, который подается на «Вход 2» микропроцессорного контроллера 22, а с «Выхода» вырабатывается сигнал управления через нормализатор 23 для изменения режима работы регулирующего исполнительного механизма 24. Одновременно многоканальный нормализатор 21 для подключения нескольких преобразователей вырабатывает сигнал, соответствующий данному воздействию 17, и в случае появления сигнала разбаланса Δ микропроцессорный контроллер 22 по адаптивной программе устанавливает следующий, наиболее эффективный оптимальный режим работы регулирующего исполнительного механизма 24, например, изменением параметра ω. Таким образом происходит контроль получаемых сигналов от преобразователей 15-20 с применением многоканального нормализатора 21. При достижении равенства ρф=ρзΔ=0 устройство отключается, и система автоматического управлении переходит в установившийся режим.
Кроме того, такое техническое решение, которое отсутствует в прототипе и в аналоге позволяет компенсировать, за счет оптимизации значения управляющего сигнала, внешние возмущающие воздействия, отрицательно влияющие на степень уплотнения насыпных строительных грунтов: M - влажность уплотняемого грунта, H0 - толщина (высота) слоя, ψм - гранулометрический состав материала, Zn - неровность уплотняемой поверхности, Егр - степень упругости грунта, отрицательно влияющая на степень уплотнения насыпных строительных грунтов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля степени уплотнения композиционных смесей | 1990 |
|
SU1749898A1 |
| Устройство для контроля степени уплотнения композиционных смесей | 1990 |
|
SU1718037A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕПЕНИ УПЛОТНЕНИЯ ГРУНТОВОГО МАССИВА | 1967 |
|
SU222709A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАСХОДА КОМПОНЕНТОВ ПРОДУКЦИИ СКВАЖИН | 1998 |
|
RU2154162C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАСХОДА КОМПОНЕНТОВ ПРОДУКЦИИ СКВАЖИН | 1998 |
|
RU2148711C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2006 |
|
RU2306611C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАСХОДА КОМПОНЕНТОВ ПРОДУКЦИИ СКВАЖИН | 1998 |
|
RU2151286C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАСХОДА КОМПОНЕНТОВ ПРОДУКЦИИ СКВАЖИН | 1998 |
|
RU2151287C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАСХОДА КОМПОНЕНТОВ ПРОДУКЦИИ СКВАЖИН | 1998 |
|
RU2151288C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАСХОДА КОМПОНЕНТОВ ПРОДУКЦИИ СКВАЖИН | 1998 |
|
RU2148168C1 |
Изобретение относится к строительству, в частности к контролю уплотнения насыпных строительных грунтов. Устройство автоматического управления исполнительным механизмом рабочего органа грунтоуплотняющей машины состоит из акселерометра, усилителя, полосового фильтра, усилителя с регулируемым коэффициентом усиления, фильтра первой гармоники, преобразователя частоты в аналоговый сигнал, алгебраического сумматора, задатчика степени уплотнения грунта, аналого-цифрового преобразователя, компаратора, триггера, формирователя импульсов, блока памяти. Устройство снабжено преобразователями контроля числа проходов машины, скорости ее перемещения, силы и частоты удара рабочего органа, частоты оборотов кривошипного механизма, входным и выходным нормализаторами для связи с объектом управления, бортовым микропроцессорным контроллером с программным обеспечением, регулируемым по нескольким оптимальным параметрам исполнительным механизмом. Первичные преобразователи через входной нормализатор сигналов электрически подключены к «Входу 1» микропроцессорного контроллера, на «Вход 2» которого подается сигнал от анализатора сравнения, а с «Выхода» через выходной нормализатор формируются команды для управления регулируемым исполнительным механизмом, кинематически сочлененным с рабочим органом машины. Обеспечивается повышение производительности грунтоуплотняющей машины, улучшение качества уплотнения насыпного покрытия. 7 ил.
Устройство автоматического управления исполнительным механизмом рабочего органа грунтоуплотняющей машины состоит из акселерометра, усилителя, полосового фильтра, усилителя с регулируемым коэффициентом усиления, фильтра первой гармоники, преобразователя частоты в аналоговый сигнал, алгебраического сумматора, задатчика степени уплотнения грунта, аналого-цифрового преобразователя, компаратора, триггера, формирователя импульсов, блока памяти, отличающееся тем, что в устройство введены преобразователи контроля числа проходов машины, скорости ее перемещения, силы и частоты удара рабочего органа, частоты оборотов кривошипного механизма, входной и выходной нормализаторы для связи с объектом управления, бортовой микропроцессорный контроллер с программным обеспечением, регулируемый по нескольким оптимальным параметрам исполнительный механизм, причем первичные преобразователи через входной нормализатор сигналов электрически подключены к «Входу 1» микропроцессорного контроллера, на «Вход 2» которого подается сигнал от анализатора сравнения, а с «Выхода» через выходной нормализатор формируются команды для управления регулируемым исполнительным механизмом, кинематически сочлененным с рабочим органом машины.
| US 4348901 A, 14.09.1982 | |||
| Способ автоматического контроля за работой валкового виброуплотнителя (его варианты) и устройство для его осуществления (его варианты) | 1977 |
|
SU961550A3 |
| Устройство контроля степени уплотнения материала | 1986 |
|
SU1388512A1 |
| Устройство для контроля степени уплотнения грунта | 1986 |
|
SU1491955A1 |
| Устройство для контроля степени уплотнения грунта | 1989 |
|
SU1715958A1 |
| RU 2052579 C1, 20.01.1996 | |||

