Изобретение относится к области вооружения и может быть использовано для вывешивания на боевой позиции самоходного артиллерийского орудия на колесном шасси.
Известен способ стабилизации корпуса самоходной пусковой установки на шасси танка (патент RU 18302U1, МПК7 F41F 3/04, опубл. 2001 г.), включающий последовательное или одновременное вывешивание носовой и кормовой части установки при подаче жидкости в рабочие полости гидроцилиндров опор и отключение подачи жидкости при касании стойками опорной поверхности.
Недостатками такого способа являются низкие скорость и точность вывешивания пусковой установки на боевой позиции, что снижает ее боевые характеристики.
Наиболее близким к заявляемому и принятым в качестве прототипа первого варианта является способ вывешивания на боевой позиции боевой машины с гидравлическими опорами (Пояснительная записка технического проекта облегченной боевой машины с транспортно-пусковым контейнером для реактивной системы залпового огня «Смерч» 9А52-4.00.000 ПЗ, стр.18-20, 2007 г.), включающий подачу жидкости в рабочие полости гидроцилиндров опор и отключение подачи жидкости при достижении расчетного значения давления в рабочей полости каждого гидроцилиндра, определяемого по заданной величине нагрузки на грунт, и последующую подачу жидкости в рабочие полости всех гидроцилиндров с одинаковым расходом для обеспечения синхронного поддомкрачивания изделия.
Такой способ позволяет повысить скорость вывешивания боевой машины на боевой позиции за счет подачи жидкости до достижения расчетного значения давления в рабочих полостях гидроцилиндров по заданной величине нагрузки на грунт.
Однако при таком способе вывешивания не обеспечивается требуемая надежность, что объясняется большой нагрузкой на мосты шасси установки, и требуемая скорострельность из-за низкой скорости гашения колебаний вывешенного таким способом самоходного артиллерийского орудия после выстрела во всем диапазоне углов вертикального и горизонтального наведения.
Наиболее близким к заявляемому и принятым в качестве прототипа второго варианта является способ вывешивания на боевой позиции боевой машины с опорами, перемещаемыми электроприводом, выходное звено которого кинематически связано с опорой (Боевая машина 9А52-2: Техническое описание 9А52-2.00.000 ТО-Э. - М.: Воентехиниздат, изд. №11/213315р-П94-з/н, стр.16), включающий подачу тока на привод каждой опоры, одновременное поддомкрачивание всех опор и автоматическое отключение подачи тока через 20 секунд.
При таком способе вывешивания не обеспечивается требуемая надежность, что объясняется большой нагрузкой на мосты шасси установки, и требуемая скорострельность из-за низкой скорости гашения колебаний вывешенного таким способом самоходного артиллерийского орудия после выстрела во всем диапазоне углов вертикального и горизонтального наведения.
Задачей предлагаемой группы изобретений является повышение надежности самоходного артиллерийского орудия и скорострельности орудия.
Единым техническим результатом, достигаемым при осуществлении заявляемой группы изобретений, является обеспечение возможности разгрузки мостов шасси и требуемой скорости гашения колебаний после выстрела во всем диапазоне углов вертикального и горизонтального наведения.
Поставленная задача в первом варианте решается усовершенствованием способа вывешивания на боевой позиции самоходного артиллерийского орудия с гидравлическими опорами, включающего подачу жидкости в рабочие полости гидроцилиндров опор и отключение подачи жидкости при достижении расчетного значения давления в рабочей полости каждого гидроцилиндра.
Это усовершенствование заключается в том, что расчетное значение давления в рабочей полости каждого гидроцилиндра определяют на боевой позиции, а отключение подачи жидкости в рабочие полости каждого гидроцилиндра осуществляют при достижении в них давления, обеспечивающего заданные усилия на мостах шасси самоходного артиллерийского орудия и углы наклона его подрессоренной части в заданном диапазоне углов вертикального и горизонтального наведения.
Определение расчетного значения давления на боевой позиции позволяет учесть требуемые параметры (углы наклона в плоскостях крена и дифферента, массу и координаты центра масс самоходного артиллерийского орудия в заданном диапазоне углов вертикального и горизонтального наведения, жесткостные характеристики шасси) при определении величины давления, создаваемого в рабочей полости каждого гидроцилиндра.
Отключение подачи жидкости в рабочие полости каждого гидроцилиндра при достижении в них давления, обеспечивающего заданные усилия на мостах шасси установки и углы наклона подрессоренной части машины в заданном диапазоне углов вертикального и горизонтального наведения, позволяет получить требуемую скорость гашения колебаний после выстрела во всем диапазоне углов вертикального и горизонтального наведения и уменьшает динамическое воздействие на шасси при выстреле за счет разгрузки мостов шасси.
Кроме того, подачу жидкости могут осуществлять в два этапа, на первом из которых жидкость подают одновременно в рабочие полости гидроцилиндров по дифференциальной схеме до расположения опор на расстоянии 100÷500 мм от опорной поверхности, а на втором - в поршневые полости гидроцилиндров опор подают жидкость до достижения расчетного значения давления.
Такой режим подачи жидкости позволяет повысить скорость вывешивания самоходного артиллерийского орудия за счет прохождения опорами большой части пути с большой скоростью и обеспечить требуемую точность вывешивания. Диапазон расстояния 100÷500 мм от опорной поверхности определен высотой неровности опорной поверхности.
Поставленная задача во втором варианте решается усовершенствованием способа вывешивания на боевой позиции самоходного артиллерийского орудия с опорами, перемещаемыми электроприводом, выходное звено которого кинематически связано с опорой, включающего подачу электропитания на электропривод каждой опоры и последующее отключение подачи электропитания.
Это усовершенствование заключается в том, что на боевой позиции определяют расчетное значение мощности электропривода каждой опоры, а отключение подачи электропитания на электропривод каждой опоры осуществляют при достижении мощности, обеспечивающей заданные усилия на мостах шасси самоходного артиллерийского орудия и углы наклона его подрессоренной части в заданном диапазоне углов вертикального и горизонтального наведения.
Определение расчетного значения мощности привода каждой опоры на боевой позиции позволяет учесть требуемые параметры (углы наклона в плоскостях крена и дифферента, массу и координаты центра масс самоходного артиллерийского орудия в заданном диапазоне углов вертикального и горизонтального наведения, жесткостные характеристики шасси) при определении мощности электропривода каждой опоры.
Отключение подачи электропитания на электропривод каждой опоры при достижении мощности, обеспечивающей заданные усилия на мостах шасси самоходного артиллерийского орудия и углы наклона его подрессоренной части в заданном диапазоне углов вертикального и горизонтального наведения, позволяет получить требуемую скорость гашения колебаний после выстрела во всем диапазоне углов вертикального и горизонтального наведения и уменьшает динамическое воздействие на шасси при выстреле за счет разгрузки мостов шасси.
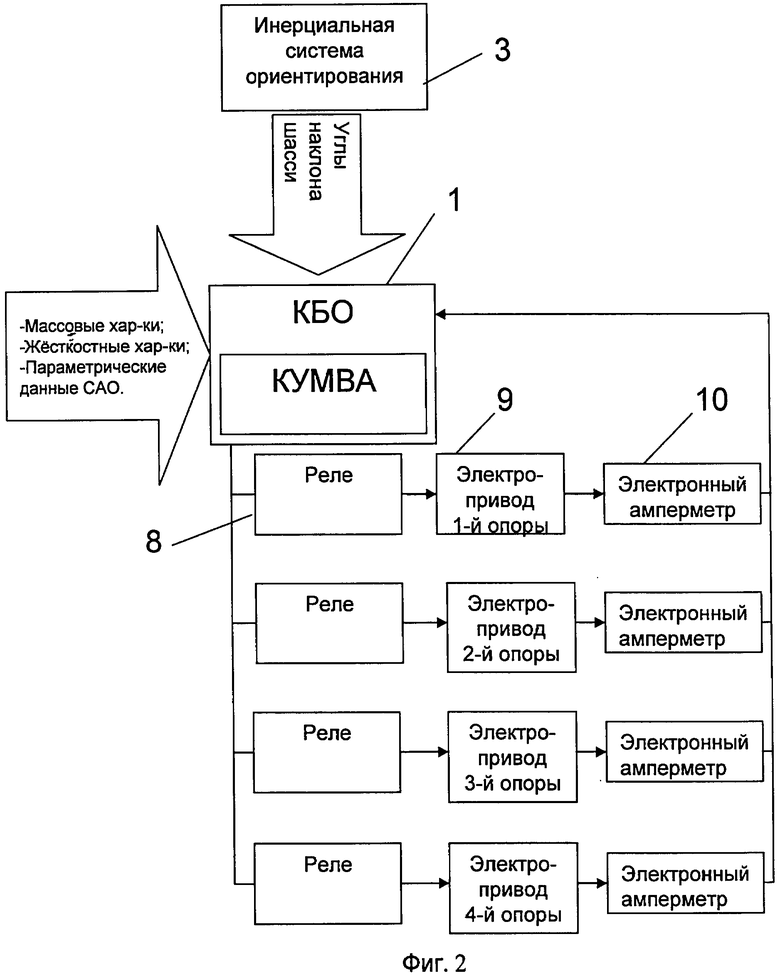
Предлагаемый способ поясняется чертежами, на которых на фиг.1 изображена функциональная схема системы автоматического вывешивания самоходного артиллерийского орудия с четырьмя гидравлическими опорами (первый вариант), на фиг.2 - функциональная схема системы автоматического вывешивания самоходного артиллерийского орудия с четырьмя опорами, перемещаемыми электроприводом (второй вариант).
Автоматическое управление вывешиванием самоходного артиллерийского орудия осуществляется комплектом бортового оборудования (КБО) 1 с его составной частью - комплексом управления механизмом внешней амортизации (КУМВА) 2. В КБО 1 вводят постоянные характеристики самоходного артиллерийского орудия: массовые, жесткостные и геометрические параметры. Вход КБО 1 соединен с инерциальной системой ориентирования 3.
В первом варианте выход КБО 1 соединен с узлами управления гидрораспределителями 4, через которые рабочая среда подается в рабочие полости гидроцилиндров опор 5. Для контроля давления в рабочих полостях гидроцилиндров опор 5 служат датчики давления 6, выходы которых соединены с входом КБО 1. Для контроля положения опор служат датчики угла 7, выходы которых соединены с входом КБО 1.
Во втором варианте выход КБО 1 соединен с реле 8 управления подачей электропитания на электроприводы 9 опор. Для контроля мощности электроприводов 9 служат электронные амперметры 10, выходы которых соединены с входом КБО 1.
Способ осуществляется следующим образом.
После прибытия самоходного артиллерийского орудия на боевую позицию КБО 1 получает от инерциальной системы ориентирования 3 данные об углах наклона ствола и рассчитывает углы наклона подрессоренной части артиллерийского орудия в плоскостях крена и дифферента, рассчитывает углы наклона площадки боевой позиции в плоскостях крена и дифферента и абсолютный угол наклона площадки. На основании расчетов определяют пригодность площадки для установки самоходного артиллерийского орудия во время стрельбы (если угол наклона площадки не превышает заданного рабочего угла). По данным задания на стрельбу КБО 1 рассчитывает необходимые углы поворота вращающейся части орудия относительно шасси и поворота качающейся части относительно вращающейся. КУМВА 2, учитывая введенные постоянные характеристики самоходного артиллерийского орудия (массовые, жесткостные характеристики, геометрические параметры) и определенные ранее переменные характеристики (углы наклона площадки боевой позиции в плоскостях крена и дифферента, абсолютный угол наклона площадки и необходимые углы поворота вращающейся части орудия относительно шасси и поворота качающейся части относительно вращающейся), рассчитывает:
- в первом варианте значения давления в рабочей полости каждого гидроцилиндра (например: 10, 11, 12 и 13 МПа) и подает сигнал на гидрораспределители 4, обеспечивающие одновременную подачу жидкости в рабочие полости гидроцилиндров всех опор 5 по дифференциальной схеме до расположения опор на расстоянии 100÷500 мм от опорной поверхности. После чего КУМВА 2 подает сигнал на переключение гидрораспределителей 4 в положение, при котором обеспечивается подача жидкости в поршневые полости гидроцилиндров опор 5 до достижения в них рассчитанного давления (например: 10, 11, 12 и 13 МПа);
- во втором варианте значение мощности электропривода каждой опоры (например, 1,2, 1,3, 1,4, 1,5 кВт) и подает сигнал на коммутирующие устройства, обеспечивающие одновременную подачу электропитания на электропривод каждой опоры. После достижения рассчитанной мощности (например, 1,2, 1,3, 1,4, 1,5 кВт), обеспечивающей заданные усилия на мостах шасси установки и углы наклона подрессоренной части машины в заданном диапазоне углов вертикального и горизонтального наведения, осуществляют отключение подачи электропитания на электропривод каждой опоры.
Самоходное артиллерийское орудие, опираясь на колеса и опоры, устанавливается в положение, при котором обеспечиваются разгрузка мостов шасси и заданная скорость гашения колебаний после выстрела.
Комплекс управления наведением (составная часть КБО) управляет точным наведением ствола, а комплекс управления механизмами заряжания (составная часть КБО 1) управляет заряжанием. После выстрела КУМВА 2 подает сигнал о положении самоходного артиллерийского орудия и перед следующим выстрелом, при необходимости, осуществляют корректировку вывешивания самоходного артиллерийского орудия вышеописанными вариантами способа.
Таким образом, использование предлагаемых вариантов способа вывешивания позволяет повысить надежность самоходного артиллерийского орудия за счет разгрузки мостов шасси и повысить скорострельность и точность орудия за счет обеспечения требуемой скорости гашения колебаний после выстрела во всем диапазоне углов вертикального и горизонтального наведения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ вывешивания на боевой позиции самоходного артиллерийского орудия (варианты) | 2012 |
|
RU2746689C2 |
| СПОСОБ ПОДГОТОВКИ К СТРЕЛЬБЕ САМОХОДНОГО АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2012 |
|
RU2526136C2 |
| Способ подготовки к стрельбе самоходного артиллерийского орудия | 2012 |
|
RU2748552C2 |
| УСТРОЙСТВО ОПОРНОЕ | 2023 |
|
RU2830436C1 |
| ОБЪЕКТ БРОНЕТЕХНИКИ НА КОЛЕСНОМ ШАССИ | 2007 |
|
RU2355977C1 |
| ОБЪЕКТ БРОНЕТЕХНИКИ НА КОЛЕСНОМ ШАССИ | 2007 |
|
RU2355992C1 |
| САМОХОДНАЯ АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 1999 |
|
RU2169337C2 |
| САМОХОДНАЯ АРТИЛЛЕРИЙСКАЯ СОЧЛЕНЕННАЯ УСТАНОВКА | 2008 |
|
RU2388987C1 |
| СПОСОБ МОДЕРНИЗАЦИИ САМОХОДНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2008 |
|
RU2395780C2 |
| БОЕВАЯ СОЧЛЕНЕННАЯ МАШИНА И ОПОРНО-СЦЕПНОЕ УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СОЧЛЕНЕНИЯ | 2007 |
|
RU2355993C2 |
Изобретение относится к области вооружения. Способ вывешивания на боевой позиции самоходного артиллерийского орудия с опорами выполнен в двух вариантах. По первому варианту способ включает подачу жидкости в рабочие полости гидроцилиндров опор и её отключение при достижении расчетного значения давления, которое определяют на боевой позиции, а отключение подачи жидкости осуществляют при достижении давления, обеспечивающего заданные усилия на мостах шасси орудия и углы наклона его подрессоренной части в заданном диапазоне углов вертикального и горизонтального наведения. По второму варианту способ отличается тем, что опоры перемещают электроприводом. Электропитание подают на электропривод каждой опоры с последующим его отключением. На боевой позиции определяют расчетное значение мощности электропривода каждой опоры, а отключение подачи электропитания на электропривод каждой опоры осуществляют при достижении мощности, обеспечивающей заданные усилия на мостах шасси орудия и углы наклона его подрессоренной части в заданном диапазоне углов вертикального и горизонтального наведения. Достигается разгрузка мостов шасси и необходимая скорость гашения колебаний после выстрела. 2 н. и 1 з.п. ф-лы, 2 ил.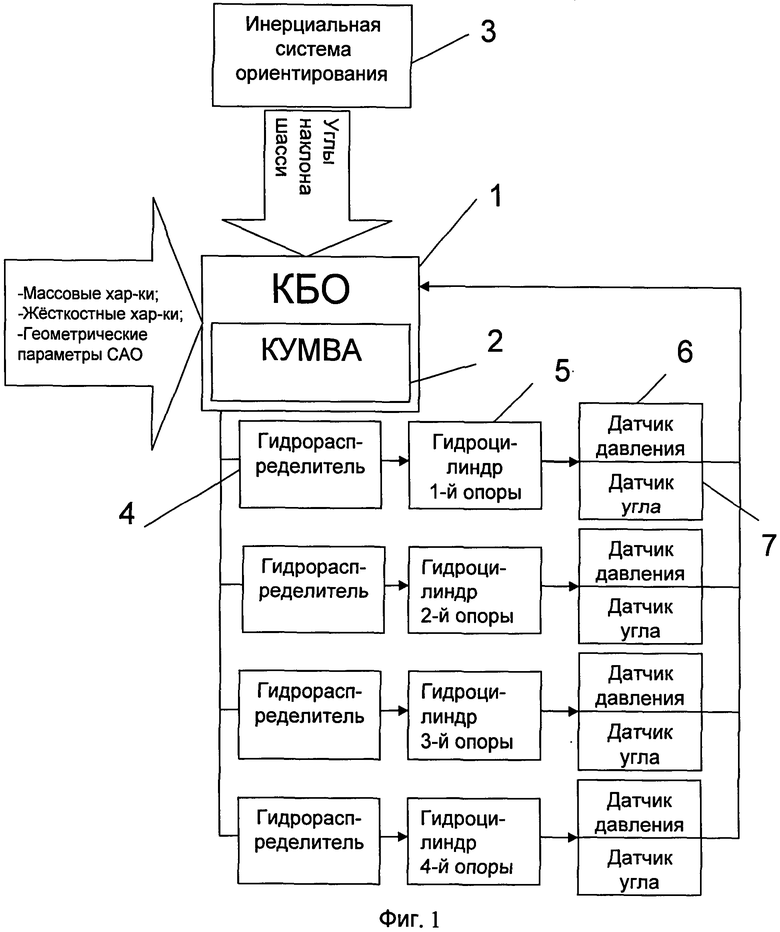
1. Способ вывешивания на боевой позиции самоходного артиллерийского орудия с опорами, включающий подачу жидкости в рабочие полости гидроцилиндров опор и отключение подачи жидкости при достижении расчетного значения давления в рабочей полости каждого гидроцилиндра, отличающийся тем, что расчетное значение давления в рабочей полости каждого гидроцилиндра определяют на боевой позиции, а отключение подачи жидкости в рабочие полости каждого гидроцилиндра осуществляют при достижении в них давления, обеспечивающего заданные усилия на мостах шасси артиллерийского орудия и углы наклона его подрессоренной части в заданном диапазоне углов вертикального и горизонтального наведения.
2. Способ по п.1, отличающийся тем, что подачу жидкости осуществляют в два этапа, на первом из которых жидкость подают одновременно в рабочие полости гидроцилиндров по дифференциальной схеме до расположения опор на расстоянии 100÷500 мм от опорной поверхности, а на втором - в поршневые полости гидроцилиндров опор подают жидкость до достижения расчетного значения давления.
3. Способ вывешивания на боевой позиции самоходного артиллерийского орудия с опорами, перемещаемыми электроприводом, выходное звено которого кинематически связано с опорой, включающий подачу электропитания на электропривод каждой опоры и последующее отключение подачи электропитания, отличающийся тем, что на боевой позиции определяют расчетное значение мощности электропривода каждой опоры, а отключение подачи электропитания на электропривод каждой опоры осуществляют при достижении мощности, обеспечивающей заданные усилия на мостах шасси самоходного артиллерийского орудия и углы наклона его подрессоренной части в заданном диапазоне углов вертикального и горизонтального наведения.
| САМОХОДНАЯ ПУСКОВАЯ УСТАНОВКА | 2005 |
|
RU2312294C2 |
| WO 03025494 A1, 27.03.2003 | |||
| US 2002129696 A1 | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| GB 390774 A, 13.04.1933 | |||

