Настоящее изобретение имеет отношение к области модульных электрических аппаратов.
В области модульных электрических приборов, в частности применяемых на гражданских и жилых объектах, известны такие электрические приборы, как, например, приборы, предназначенные для установки на каркасе по стандарту DIN, снабженные выступающим в сторону соединительным рычагом. Такой соединительный рычаг выступает сбоку основной корпусной детали электрического аппарата для взаимодействия с рычагом управления добавочного модульного аппарата, подлежащего установке, на электрической панели или распределительном щите рядом с электрическим аппаратом, снабженным таким выступающим в сторону соединительным рычагом.
Первый пример модульного электрического аппарата обозначенного выше типа описан в ЕР 1441376, который, в частности, раскрывает устройство с приводом от двигателя, которое может быть соединено с устройством отключения для дистанционного управления последним. Также ЕР 1744428 раскрывает пример модульного электрического аппарата в форме устройства с приводом от двигателя, содержащего соединительный рычаг, выступающий в сторону.
ЕР 1916682 описывает модульный электрический аппарат, который, в частности, состоит из устройства сцепления для электрических аппаратов, содержащего два выступающих в сторону соединительных рычага.
В модульных электрических аппаратах описанного выше типа длина выступающего в сторону соединительного рычага, как правило, пропорциональна суммарному размеру модулей модульного электрического аппарата, для взаимодействия с которым предназначен электрический аппарат, снабженный соединительным рычагом. По этой причине производители электрических приборов в настоящее время изготавливают различные составные устройства, которые четко соответствуют техническим условиям на различные устройства, отличающиеся друг от друга лишь тем, что имеют различные длины соединительных рычагов, выступающих в сторону, на основании размера модуля электрического аппарата, для взаимодействия с которым предназначен электрический аппарат, снабженный выступающим в сторону соединительным рычагом.
Например, в конкретном случае модульных электрических аппаратов в форме устройств с приводом от двигателя, таких как, например, электрические аппараты, описанные в вышеупомянутых заявках на патент ЕР 1441376 и ЕР 1744428, рыночные условия требуют, чтобы производители обеспечивали различные устройства с приводом от двигателя для приведения в действие модульных устройств отключения с различными количествами полюсов. В действительности, модульные устройства отключения могут, например, принадлежать как к однополюсному типу, например, имеющему размер по количеству модулей, равный 1, с необходимостью, таким образом, активации посредством соединительного рычага относительно малой длины, так и к многополюсному типу, например, имеющему размер по количеству модулей, равный 4, в случае с четырехполюсным устройством отключения, с необходимостью, таким образом, активации посредством соединительного рычага относительно большой длины. Хотя движение рычага управления четырехполюсного устройства отключения теоретически идентично движению рычага управления любого другого устройства отключения, имеющего меньшее количество полюсов, такое движение требует гарантии соответствующего покрытия рычага управления устройства отключения, приводимого в действие соединительным рычагом. В действительности, если данное условие не выполняется, могут возникнуть проблемы с изгибанием рычага управления четырехполюсного устройства отключения, которые могут вызвать отказ при выполнении команды, подлежащей исполнению устройством с приводом от двигателя, особенно если это команда для замыкания цепи. По этой причине в настоящее время производители изготавливают и продают устройства с приводом от двигателя, которые принадлежат к одному и тому же семейству продуктов, но которые отличаются друг от друга тем, что имеют выступающие в сторону соединительные рычаги различной длины. Данное решение не очень гибкое и вызывает неудобства, как для производителя, так и для конечного потребителя. Последний, в действительности, приобретя, например, устройство с приводом от двигателя для однополюсного устройства отключения, не может использовать это же самое устройство для четырехполюсного устройства отключения и наоборот.
Цель настоящего раскрытия состоит в обеспечении электрического аппарата с выступающим в сторону соединительным рычагом, который должен быть способен преодолеть проблемы, обозначенные выше, со ссылкой на предыдущую область техники.
Данная цель достигается посредством электрического аппарата, как описано в п.1 формулы изобретения. Предпочтительные варианты реализации указанного аппарата описаны в зависимых пунктах.
Дальнейшие признаки и преимущества электрического аппарата по настоящему изобретению станут понятны, исходя из последующего подробного описания посредством не ограничивающего примера со ссылкой на приложенные чертежи, где:
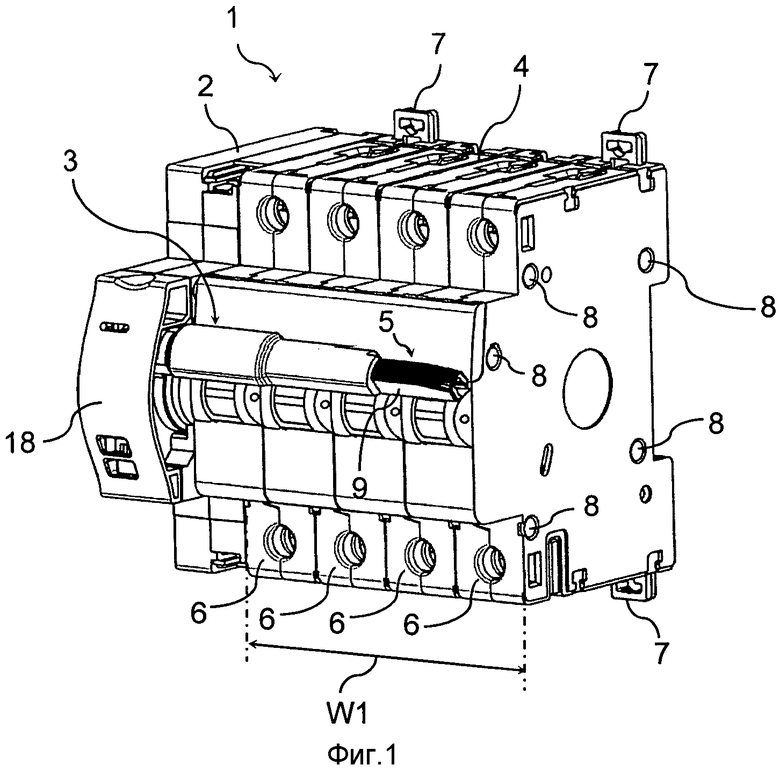
фиг.1 представляет аксонометрический вид электрического набора деталей в сборе, содержащего устройство управления с приводом от двигателя, снабженного соединительным рычагом, и содержащего далее модульный электрический аппарат в форме четырехполюсного устройства отключения;
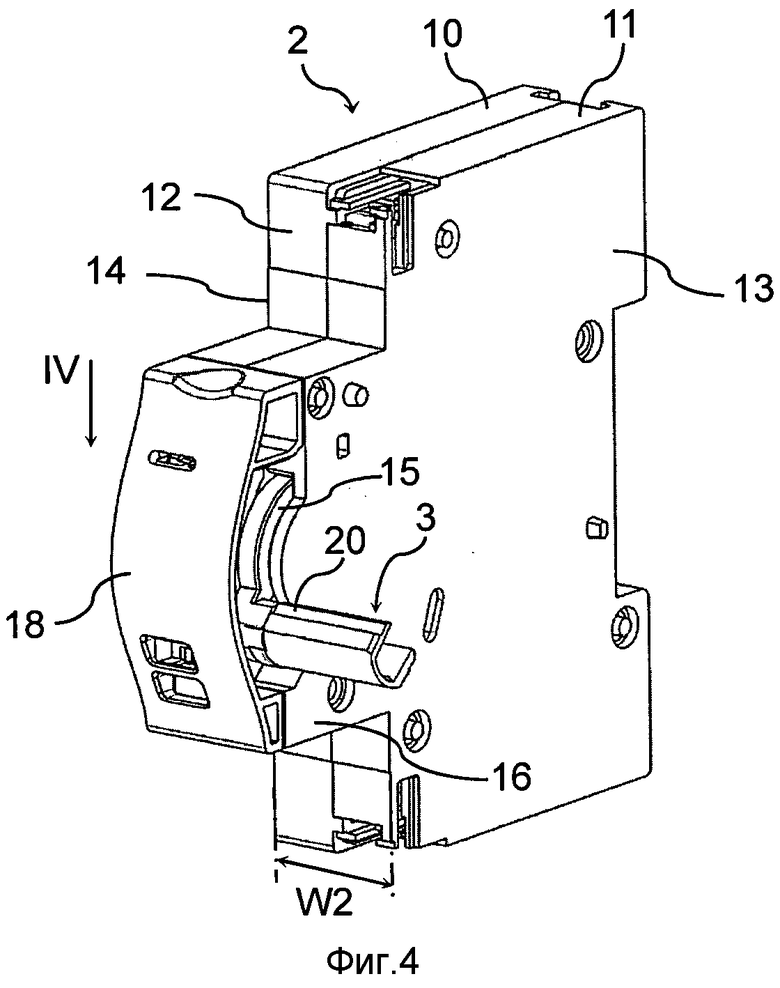
фиг.2 представляет аксонометрический вид устройства управления с приводом от двигателя с фиг.1 в первом рабочем положении;
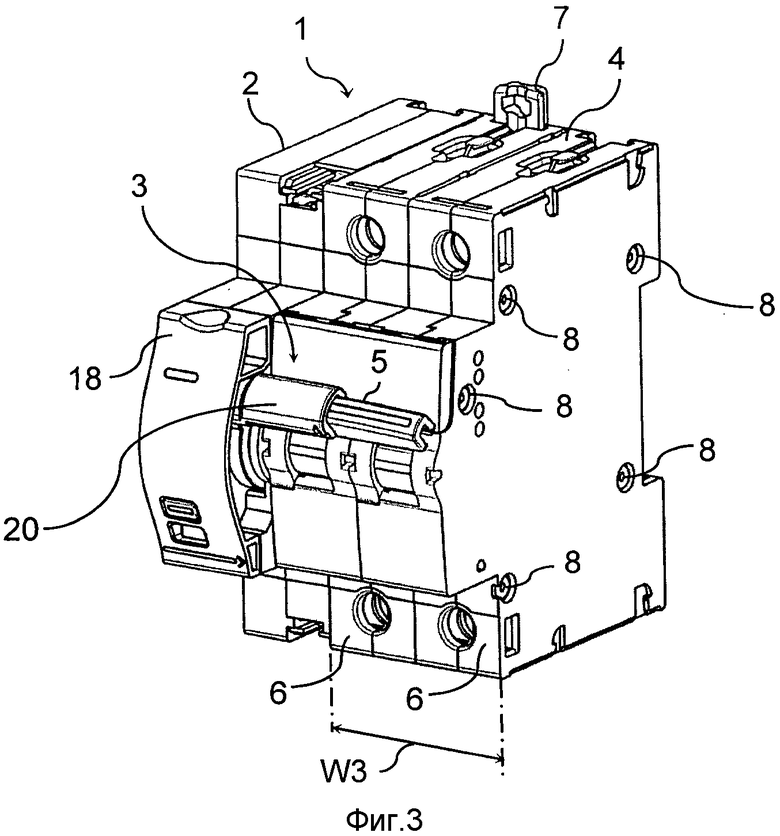
фиг.3 представляет аксонометрический вид электрического набора деталей в сборе, содержащего устройство управления с приводом от двигателя, по фиг.1 и модульный электрический аппарат в форме двухполюсного устройства отключения;
фиг.4 представляет аксонометрический вид устройства управления с приводом от двигателя с фиг.1 во втором рабочем положении;
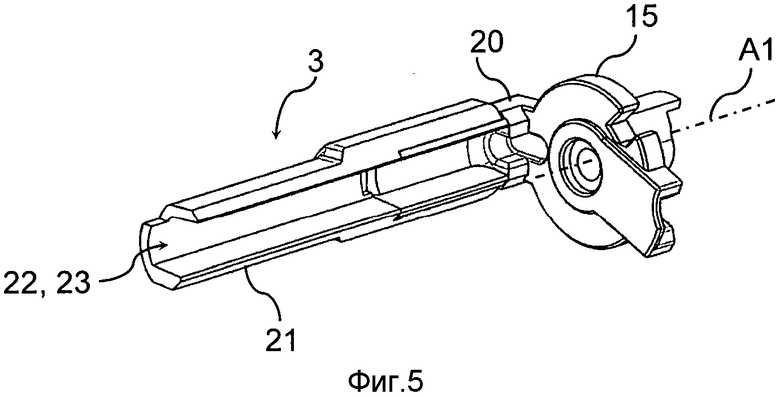
фиг.5 представляет аксонометрический вид сзади, на котором более подробно показан соединительный рычаг модульного устройства управления с приводом от двигателя по фиг.1, когда он находится в первом рабочем положении;
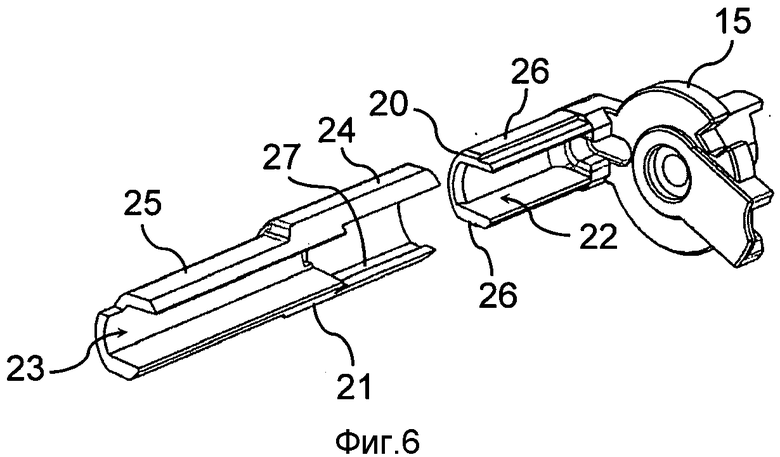
фиг.6 представляет аксонометрический вид сзади, на котором более подробно показан соединительный рычаг модульного устройства управления с приводом от двигателя по фиг.1, когда он находится во втором рабочем положении;
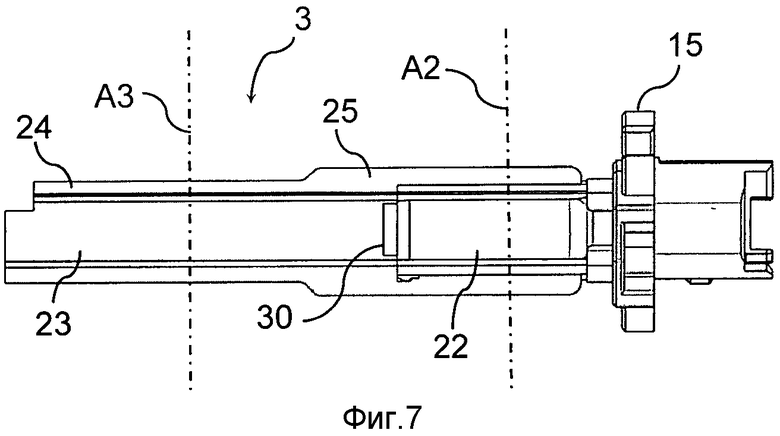
фиг.7 представляет вид сзади, на котором более подробно показан соединительный рычаг модульного устройства управления с приводом от двигателя по фиг.1, когда он находится в первом рабочем положении; и
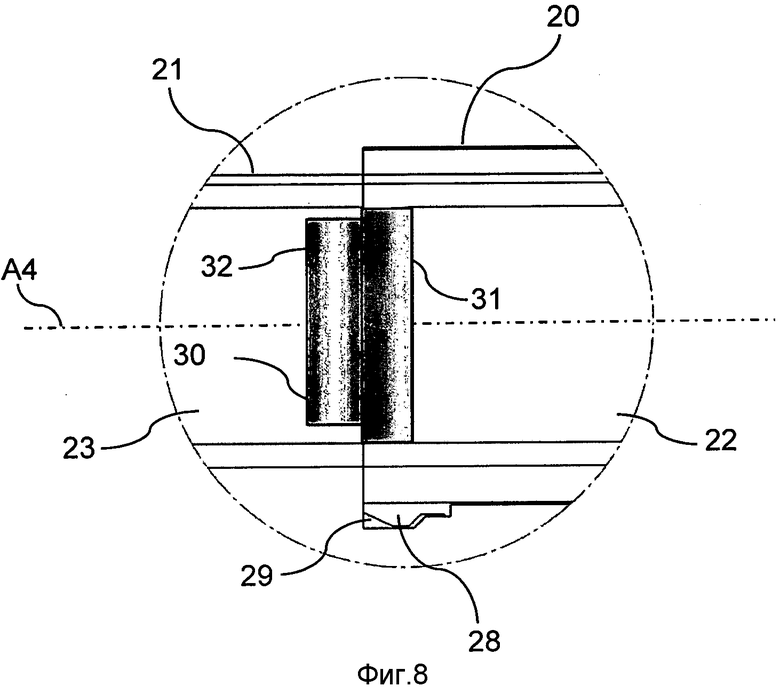
фиг.8 представляет увеличенный вид сверху участка по фиг.7.
На фиг.1 представлен пример комплекта деталей 1 в сборе, содержащий первый модульный электрический аппарат 2, снабженный выступающим в сторону соединительным рычагом 3, и содержащий далее модульный электрический аппарат в форме четырехполюсного устройства отключения 4, снабженного рычагом управления 5 для приведения устройства отключения 4 в разомкнутое состояние, либо замкнутое состояние. Модульный электрический аппарат 2 расположен рядом с четырехполюсным устройством отключения 4, а выступающий в сторону соединительный рычаг 3 выполнен с возможностью связи с рычагом управления 5.
В представленном конкретном примере четырехполюсное устройство отключения 4 состоит из четырех однополюсных устройств отключения 6, расположенных рядом и соединенных в единое целое посредством заклепок 8. Каждое из указанных устройств отключения 6 соответствует модулю по стандарту DIN, т.е. четырехполюсное устройство отключения 4 имеет ширину W1, соответствующую четырем модулям по стандарту DIN. Рычаг управления 5 четырехполюсного устройства отключения 4 содержит стержень 9 с сечением С-образной или U-образной формы, который контактирует с конечными участками четырех рычагов управления однополюсных устройств отключения 6 (на фигурах не показаны) и закреплен к ним, для одновременного приведение в действие этих рычагов. В представленном конкретном примере рычаг управления 5 является рычагом, поворотным относительно оси вращения и имеет два устойчивых угловых положения, соответствующих замкнутому положению устройства отключения 4 (при котором рычаг управления 5 направлен вверх, как показано на фиг.1), и разомкнутому положению устройства отключения 4 (при котором рычаг управления 5 направлен вниз) соответственно.
Четырехполюсное устройство отключения 4 представляет собой конструкцию для фиксации на каркасе по стандарту DIN (на фигурах не показан) при помощи скоб 7, для установки четырехполюсного устройства отключения 4 внутри распределительного щита или электрической панели.
В представленном конкретном примере модульный электрический аппарат 2 представляет собой устройство с приводом от двигателя, предназначенное для того, чтобы позволять оператору или системе управления дистанционно управлять четырехполюсным устройством отключения 4. Например, такое устройство с приводом от двигателя 2 подобно устройству с приводом от двигателя, описанному в ЕР 1441376 или ЕР 1744428.
В альтернативной реализации не обязательно, чтобы модульный электрический аппарат представлял собой устройство с приводом от двигателя, а представлял, например, блокировочное устройство, такое как, например, описанное в ЕР 1916682.
В дальнейшем будут описан только модульный электрический аппарат в виде устройства с приводом от двигателя 2, без введения каких-либо ограничений.
Устройство с приводом от двигателя 2 содержит коробчатый основной корпус 10, 11 в виде двух смежных полукожухов. Основной коробчатый корпус 10, 11 ограничен двумя противоположными, практически плоскими и параллельными боковыми стенками 12, 13, поперечное расстояние W2, которое определяет размер модульного аппарата 2, в данном примере равно модульной величине. Основной корпус 10, 11 фиксируется к тому же самому каркасу по стандарту DIN, к которому крепится устройство отключения 4, либо крепится, как к каркасу по стандарту DIN, так и к боковой стенке устройства отключения 4.
Соединительный рычаг 3 устройства с приводом от двигателя направлен в сторону от основного корпуса 10, 11 относительно одной из противоположных стенок 13, 14, в примере относительно боковой стенки 13, для взаимодействия с рычагом управления 5 четырехполюсного устройства отключения 4. Следует отметить, что соединительный рычаг выступает от основного корпуса 10, 11 таким образом, чтобы выдаваться за пределы одной из боковых стенок 13, 14 в направлении, перпендикулярном указанной стенке 13.
В представленном конкретном примере соединительный рычаг 3 поворачивается относительно оси вращения А1 (фиг.5) между двумя угловыми рабочими положениями для перемещения рычага управления 5 устройства отключения 4 в одно из устойчивых угловых положений для включения или отключения устройства отключения 4. Соединительный рычаг имеет механическое соединение посредством подвижной детали 15 (в данном примере вращающейся) и соответствующего устройства сцепления (известного и не показанного на фигурах) с двигателем, расположенным внутри основного корпуса 10, 11 для передачи вращения от указанного двигателя, например, по команде, посылаемой оператором дистанционно. В соответствии с реализацией, представленной на фигурах, поворотная деталь 15 имеет, по существу, форму поворотного диска и расположено в выступающем участке 16 основного корпуса 10, 11.
Следует отметить, что на фиг.1 соединительный рычаг 3 показан в угловом положении, соответствующем замкнутому состоянию («ВКЛ.») устройства отключения 4, а на фиг.2 этот рычаг 3 показан в угловом положении, соответствующем разомкнутому состоянию устройства отключения 4. В представленном конкретном примере устройство с приводом от двигателя 2 содержит систему фиксации соединительного рычага 3 в рабочем положении по фиг.2 для предотвращения преждевременного поворота соединительного рычага 3 при попытке перемещения его в угловое положение по фиг.1, для повышения безопасности системы и операторов. Система фиксации содержит, например, движок 18, скользящий по направлению, параллельному стрелке IV, имеющий скользящее соединение с выступающим передним участком 16 основного корпуса 10, 11, обеспечивающее перемещения между двумя рабочими положениями, когда указанный движок соответственно допускает или не допускает вращение поворотной детали 15, а следовательно, и соединительного рычага 3. Скользящий движок 18 обозначенного выше типа известен, и по этой причине дальнейшее его описание не приводится.
В соответствии с фиг.2-8 соединительный рычаг 3 содержит первый участок 20, кинематически соединенный с основным корпусом 10, 11, и второй участок 21, предназначенный для разъемного соединения с первым участком 20, что позволяет удлинять соединительный рычаг 3 для увеличения его общей длины под модульный размер конкретного электрического аппарата 4. В данном случае кинематически связанные механизмы имеют поворотное соединение. По варианту реализации, первый участок рычага может иметь скользящее соединение с основным корпусом, в этом случае кинематическое соединение между первым участком рычага и основным корпусом должно представлять собой скользящее соединение.
Первый участок рычага 20 выступает в сторону из основного корпуса 10, 11, в примере он выступает со стороны боковой стенки 13 в направлении, практически перпендикулярном этой стенке. Таким образом, когда второй участок рычага 21 не присоединен к первому участку 20, соединительный рычаг 3 имеет относительно меньшую общую длину, так что устройство управления 2 может быть соединено с модульным электрическим аппаратом 4 относительно малого модульного размера, тогда как при соединении второго участка рычага 21 с первым участком 20, соединительный рычаг 3 имеет относительно большую общую длину, поэтому устройство управления 2 может быть соединено с модульным электрическим аппаратом 4 относительно большего модульного размера. Иными словами, второй участок рычага представляет собой удлинитель, связанный с первым участком рычага.
В особо предпочтительной реализации длина первого участка рычага 20, выступающего в сторону за боковую стенку 13, практически равна ширине модуля по стандарту DIN, а общая длина соединительного рычага 3, т.е. его участка, выступающего в сторону за боковую стенку 13, когда второй участок рычага 21 соединен с первым участком рычага 20, практически равна трехкратной ширине модуля по стандарту DIN. В настоящей реализации, когда второй участок рычага 21 не соединен с первым участком рычага 20, устройство управления 2 может быть соединено с модульным аппаратом 4 того же размера, что и модуль DIN, например с однополюсным устройством отключения, либо с электрическим аппаратом 4 размера, равного двум модулям DIN, например с двухполюсным устройством отключения. С другой стороны, когда второй участок рычага 21 соединен с первым участком рычага 20, устройство управления 2 может быть соединено с модульным электрическим аппаратом 4 с размером, составляющим трехкратный размер модулей DIN, например с трехполюсным устройством отключения, или с модульным электрическим аппаратом 4 с размером, составляющим четырехкратный размер модулей DIN, например с четырехполюсным устройством отключения 4.
На фиг.3 представлено устройство с приводом от двигателя 2 из набора комплектующих по фиг.1, соединенное с двухполюсным модульным электрическим аппаратом 4, в целом подобное четырехполюсному устройству отключения 4 с фиг.1 и отличающееся от него, по существу тем, что имеет меньший модульный размер. На практике, двухполюсное модульное устройство отключения 4 имеет модульный размер W3, равный двум модулям. Как можно видеть, второй участок рычага 21 отсоединен от первого участка 20, поскольку первый участок рычага 20 имеет достаточную длину (в данном примере примерно равную ширине модуля DIN), для приведения в действие рычага управления 5 устройством управления 2.
В особо предпочтительной реализации второй участок рычага 21 изготовлен из пластика, имеющего такую величину модуля упругости, чтобы обеспечить высокую жесткость на изгиб. Более предпочтительно, чтобы второй участок рычага 21 был изготовлен из полифталамида, армированного смешанным наполнителем (минеральный наполнитель и стекловолокно) или иного материала с подобными или эквивалентными характеристиками в единицах модуля упругости. Более предпочтительно, чтобы второй участок рычага 21 был изготовлен из полифталамида, армированного 65% смешанным наполнителем (минеральный наполнитель и стекловолокно) или иного материала с подобными или эквивалентными признаками в единицах модуля упругости. Что касается первого участка рычага 20, хотя требования относительно него в единицах модуля упругости не столь строги, можно использовать тот же материал, что и для второго участка рычага 21.
Как можно видеть на примере, приведенном на фиг.5 и 6, соединительный рычаг 3 имеет практически С- или U-образную, т.е. полую форму поперечного сечения, образующую внутренний соединительный канал 22, 23, для размещения свободного конечного участка рычага управления 5. Соответственно такой внутренний канал содержит первый участок 22, образованный внутри первого участка рычага 20, и второй участок 23, образованный внутри второго участка рычага 21. Предпочтительно, соединительный канал 22, 23 является практически сплошным каналом с практически постоянным сечением, когда первый 20 и второй 21 участки рычага соединены вместе. Следует заметить, что второй участок рычага при соединении с первым участком располагается на длине соединительного канала первого участка рычага, создавая, таким образом, непрерывный длинный канал, имеющий постоянное или практически постоянное сечение.
В одном из выполнений, один из двух участков рычага 20, 21 предназначен для того, чтобы по меньшей мере, частично располагаться внутри другого из двух участков рычага. Предпочтительно, второй участок рычага 21 содержит расширенный свободный конечный участок 24 (относительно остающегося участка 25 участка рычага 21), а первый участок рычага 20 предназначен для того, чтобы, по меньшей мере, частично располагаться в осевом направлении в этом расширенном конечном участке 24.
В выполнении, представленном на фиг.7, расширенный свободный конечный участок 24 имеет большее сечение (например, вдоль оси А2), определяемое внутренними и наружными размерами, чем сечение, например, вдоль оси A3 остального участка 24 второго участка рычага 21.
В одном из выполнений внутренние стенки расширенного свободного конечного участка 24 имеют форму, конгруэнтную форме внешних стенок первого участка рычага 20 так, что при зацеплении формы совпадают, обеспечивая устойчивое соединение между первым участком рычага 20 и вторым участком рычага 21. С этой стороны, на внешних стенках первого участка рычага 20 и внутренних стенках 21 расширенного участка 24 выполнены направляющие элементы, такие как, например, по меньшей мере, один паз 27 и дополнительное ребро 26, расположенное в этом пазу 27. Например, на внешней стенке первого участка рычага 20 могут быть выполнены два противоположных ребра, для установки в пазы 27 соответствующей противоположной формы (из них на фигурах виден только один), имеющихся внутри расширенного свободного конечного участка 24.
В особо предпочтительном выполнении соединительный рычаг 3 содержит защелкивающиеся детали, с целью предотвращения нежелательного относительного осевого скольжения между вторым участком рычага 21 и первым участком рычага 20, когда они соединены вместе. Со ссылкой на фиг.8, под осевым направлением А4 подразумевается направление, параллельное направлению продольного расположения соединительного рычага 3.
Например, со ссылкой на фиг.8, защелкивающиеся детали содержат зубец 28, направленный радиально от первого участка рычага 20 для расположения в соответствующем углублении 29, имеющемся во втором участке рычага 21. Со ссылкой на фиг.8, под радиальным направлением подразумевается направление, перпендикулярное осевому направлению А4. По альтернативной реализации, из второго участка рычага 21 выступает зубец 28, а в первом участке рычага 20 предусмотрено углубление.
По особо предпочтительной реализации, в зацепление внутрь расширенного свободного конечного участка 24 может входить значительная часть (например, 100% или 90% общей длины) первого участка рычага.
По особо предпочтительной реализации, один из участков рычага с одной стороны соединительного канала 22, 23 снабжен углублением 30, или выемкой, имеющей открытую сторону и предназначенной для расположения между первым 20 и вторым 21 участками рычага, когда они соединены вместе. Преимущественно, такая выемка 30 позволяет легче производить отсоединение двух участков рычага 20, 21. Например, со ссылкой на фиг.8 следует отметить, что поместив головку плоской отвертки или другого подходящего инструмента в выемку 30 и повернув головку, действуя ею как рычагом, приподнимая стенки 31 и 32, можно вынуть эти стенки 31, 32 для освобождения зубца 28 из углубления 29. Предпочтительно, стенка 31, смежная открытой стороне выемки 30, представляет собой стенку с наклонной плоскостью, чтобы облегчить вхождение и центровку головки отвертки или другого подходящего инструмента внутри выемки 30.
На основании приведенного описания, можно, таким образом, понять, что электрический аппарат по настоящему изобретению обеспечивает решение проблем, упомянутых выше, присущих предыдущему уровню техники. Следует отметить, что электрический аппарат описанного выше типа может быть соединен с электрическими аппаратами, имеющими различные величины ширины модуля, значительно снижая затраты производителя на производство/управление, а также делая процесс выбора и приобретения более удобным для монтажника. Для удобства производителя, в комплект электрического аппарата, снабженного выступающим в сторону соединительным рычагом 3, можно уже заранее включать второй участок рычага, чтобы оставить монтажнику возможность формирования электрического аппарата на основании конкретных требований.
Изобретение относится к области модульных электрических аппаратов. Модульный электрический аппарат (2), содержит: основной коробчатый корпус с двумя противоположными стенками, расстояние между ними имеет модульный размер (W2; соединительный рычаг (3) выступает в сторону от основного корпуса (10, 11) со стороны одной (13) из указанных боковых стенок, для соединения электрического аппарата (2) с дополнительным электрическим аппаратом; соединительный рычаг (3) содержит первый участок (20), кинематически связанный с указанным основным корпусом (10, 11), и второй участок (21), предназначенный для разъемного соединения с первым участком (20) с обеспечением возможности удлинения указанного первого участка (20) для регулировки длины указанного соединительного рычага (3) под модульный размер указанного дополнительного электрического аппарата (4). Техническим результатом является повышение гибкости устройства. 14 з.п. ф-лы, 8 ил.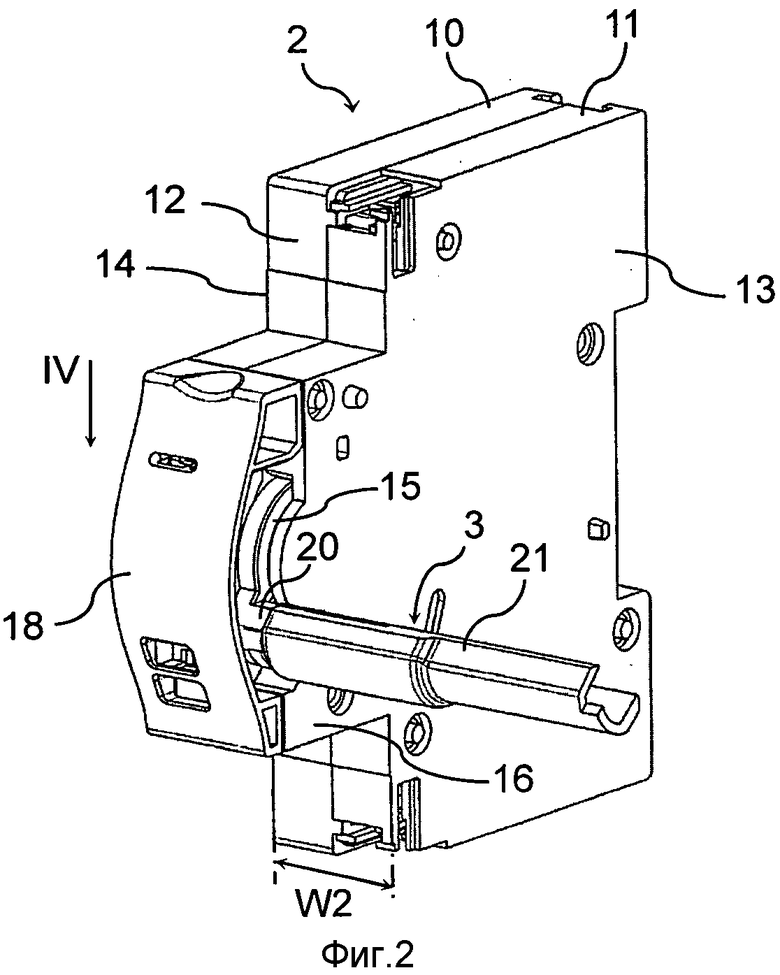
1. Модульный электрический аппарат (2), содержащий
- основной коробчатый корпус (10, 11), ограниченный двумя противоположными стенками (13, 14), расстояние между которыми имеет модульный размер (W2) электрического аппарата;
- соединительный рычаг (3), который выступает в сторону от основного корпуса (10, 11) со стороны одной (13) из указанных боковых стенок (13, 14), для соединения электрического аппарата (2) с дополнительным электрическим аппаратом (4), предназначенным для установки рядом с указанным модульным аппаратом (2); при этом соединительный рычаг предназначен для соединения с рычагом управления (5) указанного дополнительного модульного электрического аппарата (4),
отличающийся тем, что
соединительный рычаг (3) содержит первый участок (20), кинематически связанный с указанным основным корпусом (10, 11), выступающий в сторону от указанного основного корпуса со стороны указанной боковой стенки (13), и второй участок (21), предназначенный для разъемного соединения с первым участком (20) с обеспечением возможности удлинения указанного первого участка (20) для регулировки длины указанного соединительного рычага (3) под модульный размер указанного дополнительного электрического аппарата (4).
2. Модульный электрический аппарат (2) по п.1, отличающийся тем, что соединительный рычаг (3) имеет С-образную или U-образную форму поперечного сечения, образующую внутренний соединительный канал, содержащий первый участок (22), расположенный внутри первого участка (20), и второй участок (23), расположенный внутри второго участка (21).
3. Модульный электрический аппарат (2) по п.2, отличающийся тем, что соединительный канал, образованный первым участком (22) соединительного рычага и вторым участком (23) соединительного рычага, представляет собой практически непрерывный канал с практически постоянным сечением, когда первый участок (20) соединительного рычага и второй участок (21) соединительного рычага соединены вместе.
4. Модульный электрический аппарат (2) по п.3, отличающийся тем, что один из указанных первого участка (20) соединительного рычага и второго участка (21) соединительного рычага может быть, по меньшей мере, частично расположен внутри другого из указанных двух участков рычага.
5. Модульный электрический аппарат (2) по п.4, отличающийся тем, что второй участок (21) соединительного рычага содержит расширенный свободный конечный участок (24) и первый участок (20) соединительного рычага может быть, по меньшей мере, частично расположен в этом расширенном свободном конечном участке (24).
6. Модульный электрический аппарат (2) по п.5, отличающийся тем, что значительная часть первого участка (20) соединительного рычага может быть расположена в расширенном свободном конечном участке (24).
7. Модульный электрический аппарат (2) по п.5 или 6, отличающийся тем, что расширенный свободный конечный участок (24) содержит внутренние стенки, которые имеют конгруэнтную форму по отношению к внешним стенкам первого участка (20) соединительного рычага, так, что обеспечивает прочное соединение между первым участком (20) соединительного рычага и вторым участком (21) соединительного рычага.
8. Модульный электрический аппарат (2) по п.7, отличающийся тем, что на внешних стенках первого участка (20) соединительного рычага и на внутренних стенках расширенного свободного конечного участка (24) имеются направляющие (26, 27).
9. Модульный электрический аппарат (2) по п.8, отличающийся тем, что на внешней стенке первого участка (23) соединительного рычага имеются два противоположных ребра (25), предназначенных для расположения в соответствующих пазах (27), имеющихся внутри расширенного свободного конечного участка (24).
10. Модульный электрический аппарат (2) по п.9, отличающийся тем, что соединительный рычаг (3) содержит защелкивающиеся детали для предотвращения осевого скольжения между вторым участком (21) соединительного рычага и первым участком (20) соединительного рычага, когда они соединены вместе.
11. Модульный электрический аппарат (2) по п.2, отличающийся тем, что один из указанных первого участка (20) соединительного рычага и второго участка (21) соединительного рычага на одной стороне соединительного канала (22, 23) имеет выемку (30) с открытой стороной, расположенную между первым участком (20) соединительного рычага и вторым участком (21) соединительного рычага, когда они соединены вместе.
12. Модульный электрический аппарат (2) по п.1, отличающийся тем, что второй участок (21) изготовлен из полифталамида, армированного смешанным наполнителем, содержащим минеральный наполнитель и стекловолокно.
13. Модульный электрический аппарат (2) по п.1, отличающийся тем, что первый участок (20) соединительного рычага выступает от основного корпуса (10, 11) в направлении, перпендикулярном указанной стенке (13).
14. Модульный электрический аппарат (2) по п.1, отличающийся тем, что он является электрическим устройством с приводом от двигателя, которое может быть связано с электрическим устройством отключения.
15. Модульный электрический аппарат (2) по п.1, отличающийся тем, что он является блокировочным устройством, которое может быть связано с электрическим устройством отключения.
| EP 1916682 A1, 28.07.2004 | |||
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ЭЛЕКТРИЧЕСКОГО АППАРАТА НА УСТАНОВОЧНОЙ НАПРАВЛЯЮЩЕЙ И ЭЛЕКТРИЧЕСКИЙ АППАРАТ, ОСНАЩЕННЫЙ ТАКИМ УСТРОЙСТВОМ (ВАРИАНТЫ) | 2003 |
|
RU2225666C1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ И СОЕДИНЕНИЯ СИЛОВЫХ УСТРОЙСТВ | 1996 |
|
RU2168250C2 |
| Устройство для ввода информации | 1987 |
|
SU1441376A2 |
| Устройство для измерения несоосности отверстий | 1990 |
|
SU1744428A1 |

