Область техники, к которой относится изобретение
Это изобретение относится к системе управляемой плавучести для фиксации объектов в пространстве без необходимости в точке крепления, связанной с землей.
Предпосылки изобретения
Документ WO 07/036930 от имени настоящего заявителя описывает объект, приспособленный для плавания в воздухе, когда он заполнен газом, имеющим меньший удельный вес, чем удельный вес воздуха, причем объект включает полую оболочку, имеющую входное отверстие, соединенное со средством регулирования давления для регулирования давления газа внутри оболочки для обеспечения того, что только сила плавучести оболочки противодействует весу объекта. Предложено много общих подходов для регулирования давления газа внутри оболочки. Таким образом, согласно одному подходу, оболочка является частью плавучей платформы, которая поддерживает объект в пространстве, и предложено соединять газовый соединитель с входным отверстием оболочки через регулируемый нагнетательный клапан, посредством чего газ может подаваться в плавучую платформу под регулируемым давлением. Благодаря этому плавучесть платформы может регулироваться для точного противодействия комбинированному весу плавучей платформы и прикрепленного объекта, таким образом, позволяя регулировать плавучесть платформы, когда прикрепляют разные объекты.
Регулируемый нагнетательный клапан может быть установлен с использованием метода проб и ошибок таким образом, чтобы давление газа было точно правильным для достижения плавучести объекта, прикрепленного к несущей конструкции или составляющего единое целое с ней. В качестве альтернативы пользователь может информироваться о надлежащем давлении газа для подачи в плавучую опорную конструкцию на основе используемого, создающего подъемную силу газа, ожидаемых условий окружающей среды и массы удерживаемого объекта.
Также предложено регулирование давления газа с использованием эластичной диафрагмы внутри полой несущей конструкции и регулирование рабочего объема газа внутри полой несущей конструкции изменением объема эластичной диафрагмы.
Хотя такие подходы эффективны, когда условия ясно определены и не подвергаются постоянным колебаниям, они неудовлетворительны для поддержания постоянной высоты, когда условия окружающей среды изменяются. В частности, устройства, описанные в документе WO 07/036930, имеют тенденцию дрейфовать, если они не привязаны, например, под воздействием воздушных течений. Кроме того, потребность калибровать нагнетательный клапан в соответствии с разными условиями окружающей среды и объектами может создавать неудобства, или калибровка с достаточной точностью может быть невозможной. Предложено применять дистанционно управляемый движитель для управляемого перемещения в пространстве удерживаемого объекта.
Патент США № 7341224 описывает миниатюрную автоматическую аэростатную систему наблюдения, плавучестью которой можно управлять с использованием баллона для сжатого газа, который удерживается аэростатным устройством и содержит газ, который легче воздуха, такой как гелий. В другом варианте осуществления изобретения аэростат предварительно накачивают, чтобы устранить необходимость прикрепления баллона для сжатого газа к аэростатному устройству. В таком случае единственный способ, которым может быть увеличена эффективная плавучесть аэростата, состоит в том, чтобы сбросить балласт. И независимо от того, применен ли внешний баллон для сжатого газа, единственный способ, которым может быть уменьшена эффективная плавучесть аэростата, состоит в выпуске газа из аэростата. Такой подход приемлем, когда главное требование состоит в том, чтобы поднять систему наблюдения на заданную высоту и затем возвратить ее на уровень земли. Однако он неприемлем, когда требуется регулирование высоты с сервоуправлением, поскольку, когда гелий выпускают для уменьшения плавучести, нет возможности последующего увеличения плавучести, так как количество гелия не может быть увеличено. Это является присущей проблемой при использовании гелия для регулирования плавучести в отличие от простого обеспечения плавучести. Кроме того, необходимость несения баллона для сжатого газа непрактична для портативных устройств, где масса баллона для сжатого газа может значительно превышать массу остальной части системы. Аэростаты развертываются либо посредством сброса с летательного аппарата, либо при помощи некоторой артиллерийской или реактивной пусковой установки.
Документ США 2006/0065777 описывает систему плавучести с регулированием плотности, имеющую процессор, управляющий клапанами, впускной клапан, впускающий воздух в емкость для сжатия аэростатного газа, и выпускной клапан для выпуска воздуха из емкости для декомпрессии аэростатного газа. Аэростат, показанный на фиг.3A, имеет жесткую внешнюю оболочку, содержащую аэростатный газ, внутри которой содержится внутренняя эластичная емкость, которая содержит воздух, который может подвергаться регулированию для управления плавучестью. Контроллер управляет функциями и операциями впускного клапана и/или насоса и выпускного клапана и/или насоса для регулирования воздушного потока.
Контроллер позволяет поддерживать равновесие, когда аэростат достиг заданной высоты при ручном управлении пилотом, но он не способен автоматически поднимать аэростат точно на заданную высоту. Кроме того, принцип работы основан на управлении плотностью, при котором используется перепад давлений между аэростатным газом (гелием) внутри оболочки и воздухом в эластичной емкости для регулирования воздушного потока в гибкую емкость и из нее для поддержания равновесия. Понятно, что хотя такой подход может быть допустимым для аэростата, когда перепад давлений в протяженном диапазоне высот может измеряться, он не пригоден для использования в ограниченных диапазонах высот, где перепады давлений незначительны. При рассмотрении в перспективе давление на уровне моря составляет 101325 Па, а на высоте 5 м оно составляет 101253 Па. На высоте 1 км оно составляет 87836 Па, а на высоте 10 км оно составляет 24283 Па. Таким образом, в то время как перепад давлений между уровнем моря и 1 км значителен, перепад давлений с разностью высот 5 м составляет всего 72 Па, что, вероятно, слишком мало, чтобы служить практическим сигналом ошибки для следящей системы управления.
Конечно, разность атмосферного давления на высоте 3 м (101282 Па) и 3,5 м (101274 Па) составляет всего 8 Па, и понятно, что она не может служить практическим сигналом обратной связи. Таким образом, когда аэростат достиг целевой высоты, поддерживать эту высоту с разрешением ±1 м на основе обратной связи по перепадам давлений невозможно. Также будет понятно, что другие условия окружающей среды, такие как температура, которые могли бы использоваться прямо или косвенно для подачи сигнала ошибки при сервоуправлении на больших высотах, непригодны на малых абсолютных или дифференциальных высотах.
Кроме того, управление высотой на основе изменений давления позволяет поддерживать высоту относительно уровня моря, но оно не учитывает изменений рельефа местности. Это не является проблемой для аэростата, который поднимается на достаточно большую высоту, свободную от высоких зданий и гор. Но это не пригодно для точного управления высотой относительно местности.
Таким образом, ясно, что документ США 2006/0065777 не соответствует подъему объекта на заданную высоту в замкнутом пространстве, таком как помещение, или удерживанию объекта на заданной высоте с точностью в диапазоне меньше 1 м.
Документ США 2008/0265086 описывает газобалластную систему для аэростатного газа для привязного аэростата, в которой используется газобалластный резервуар для аэростатного газа, который расположен на земле и соединен с привязным аэростатом кольцом двойного скольжения и полой подающей трубой.
Документ США 2008/0135678 описывает аэростат для транспортировки пассажиров и грузов, имеющий контроллер, который регулирует поток первого газа в оболочку и из нее для активного управления подъемом и спуском аэростата.
Патент США №5782668 описывает аэростат для рекламы, имеющий внутренний источник света, который соединен со стационарным источником питания и который отключается, если аэростат сдувается, или его поверхность деформируется.
Патент США №3839631 описывает автоматически уравновешивающийся накачанный взвешенный объект, который легче окружающей среды. Равновесие автоматически достигается при помощи эластичной привязи, проходящей от фиксированной возвышенной точки до объекта. Вертикальное перемещение объекта изменяет часть веса привязи, удерживаемой объектом, пока удерживаемый объектом вес привязи не сравнивается с подъемной силой.
Документ Франции 2372075 описывает заполненный гелием аварийный аэростат, высота которого стабилизируется с использованием воздуха и который оснащен передатчиком.
Документ США 2008/299990 описывает системы и способы, относящиеся к управлению скороподъемностью, геолокации с платформы легче воздуха, включающей полезную нагрузку, и наземным пунктам базирования транспортного средства и управляемым системам спасения. Аппарат легче воздуха может иметь альтиметр и балласт, обеспечивающие регулирование высоты. Стартовые площадки используются для запуска приемопередатчика для его подъема на стратосферную регулируемую высоту, составляющую приблизительно 60000-140000 футов.
Патент США № 3957228 описывает привязной термодинамический змейковый аэростат, содержащий нежесткий накачиваемый корпус, частично жесткую, содержащую гелий оболочку и жесткий корпус, прикрепленный к нижней части корпуса, который содержит оборудование для удерживания змейкового аэростата на заданной высоте.
Документ WO 2008/051638 описывает воздушное судно, имеющее первую емкость, содержащую первый газ, и вторую емкость, содержащую второй газ. Контроллер управляет потоком первого газа в первую емкость и из нее для активного управления подъемом и спуском воздушного судна.
Документ WO 95/04407 описывает высотную систему связи, содержащую, по меньшей мере, две наземные станции и, по меньшей мере, одну высотную ретрансляционную станцию, высота и местоположение которой контролируются.
Сущность изобретения
Целью настоящего изобретения является получение плавучей несущей конструкции, имеющей контроллер для управления высотой несущей конструкции, которая не требует точки крепления, связанной с землей, или калибровки для каждого прикрепленного к ней объекта, и которая обеспечивает лучшее управление, чем подходы, предложенные в документе WO 07/036930.
Согласно первому объекту изобретения, получена управляемая плавучая система, имеющая признаки по п.1.
В одном варианте осуществления изобретения полая оболочка эластичная и расположена внутри внешней оболочки, содержащей достаточный объем гелия для обеспечения заданной плавучести, и воздух накачан в полую внутреннюю оболочку и служит балластным грузом. Таким образом, достигается регулируемая высота посредством добавления воздуха во внутреннюю оболочку или выпуска воздуха из нее.
В некоторых вариантах осуществления изобретения изменение объема внутренней камеры достигается механически.
В некоторых вариантах осуществления изобретения управляемое изменение плотности первого газа в полой камере служит для регулирования плавучести несущей конструкции.
В некоторых вариантах осуществления изобретения к несущей конструкции может быть прикреплен объект, и осуществляется управление преобразователем высоты для поддержания плавучести несущей конструкции на заданной высоте, которая может быть отобрана при помощи соответствующего селектора таким образом, что плавучая платформа вместе с прикрепленным объектом достигает положения равновесия, когда сила плавучести платформы противодействует комбинированному весу платформы и прикрепленного объекта.
В таких вариантах осуществления изобретения объект может составлять одно целое с плавучей платформой и может быть электрическим устройством с автономным источником питания, работающим от батареи или на солнечной энергии. Объект может быть отдельным от несущей конструкции или составлять единое целое с ней.
Краткое описание чертежей
Чтобы понять изобретение и видеть как оно может быть осуществлено практически, теперь будут описаны варианты осуществления изобретения только в качестве не вносящего ограничений примера со ссылками на прилагаемые чертежи, на которых:
фиг.1 - схематичная иллюстрация основного принципа системы управления для регулирования высоты автономного объекта в пространстве в соответствии с вариантом осуществления изобретения;
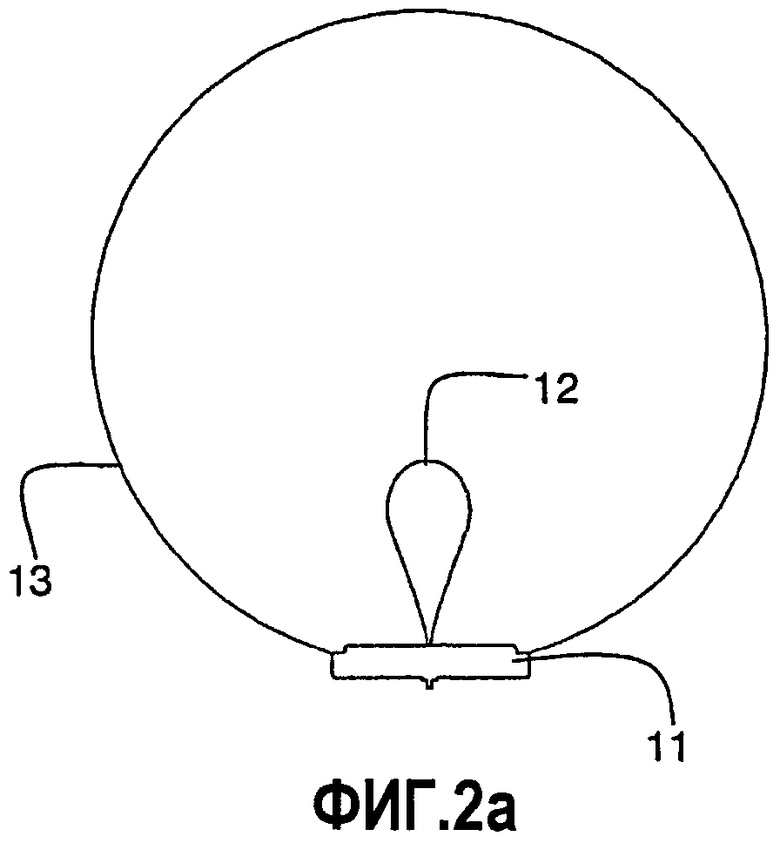
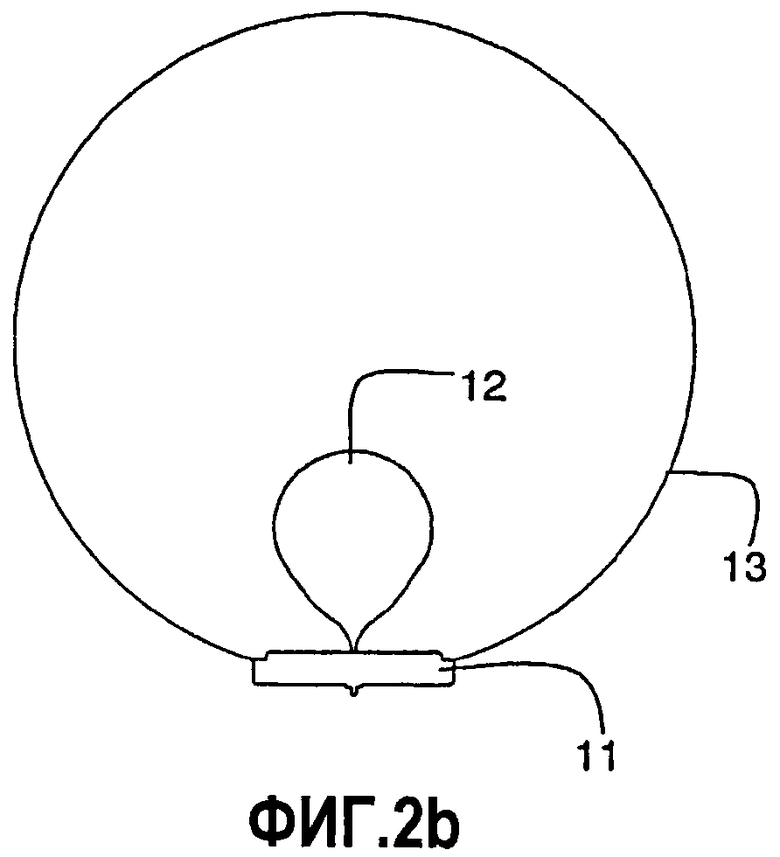
фиг.2a и 2b - схематичные виды несущей конструкции, имеющей преобразователь высоты согласно варианту осуществления изобретения;
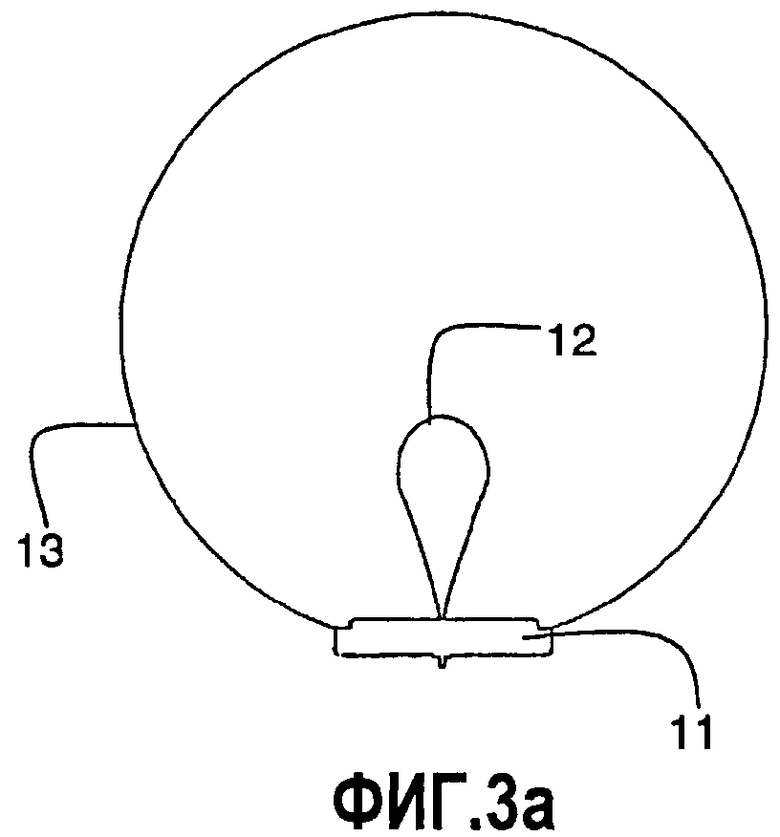
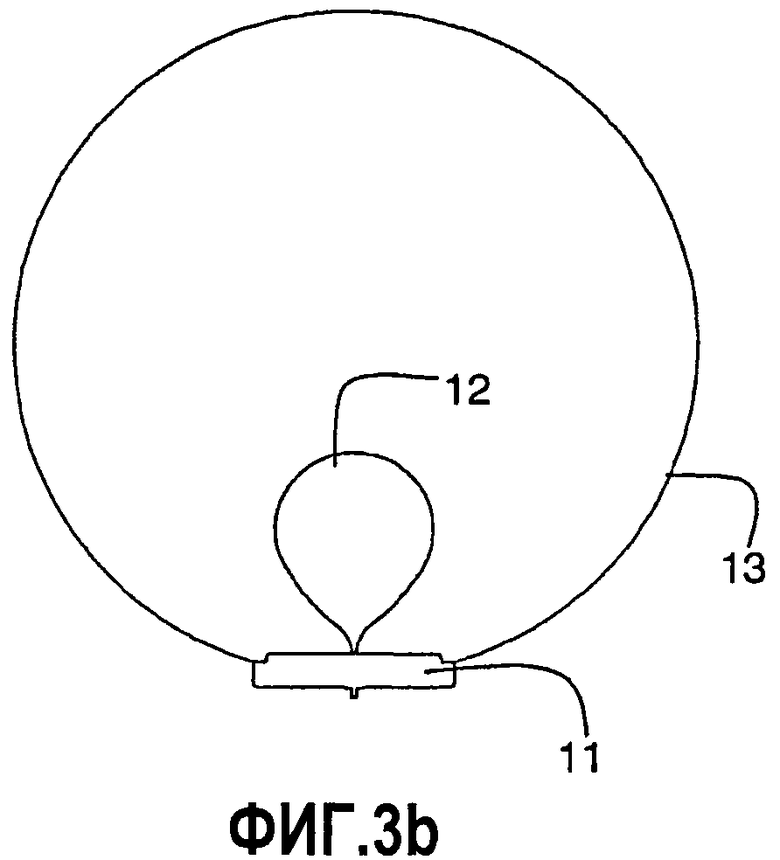
фиг.3a и 3b - схематичные виды несущей конструкции, имеющей преобразователь высоты согласно варианту осуществления изобретения;
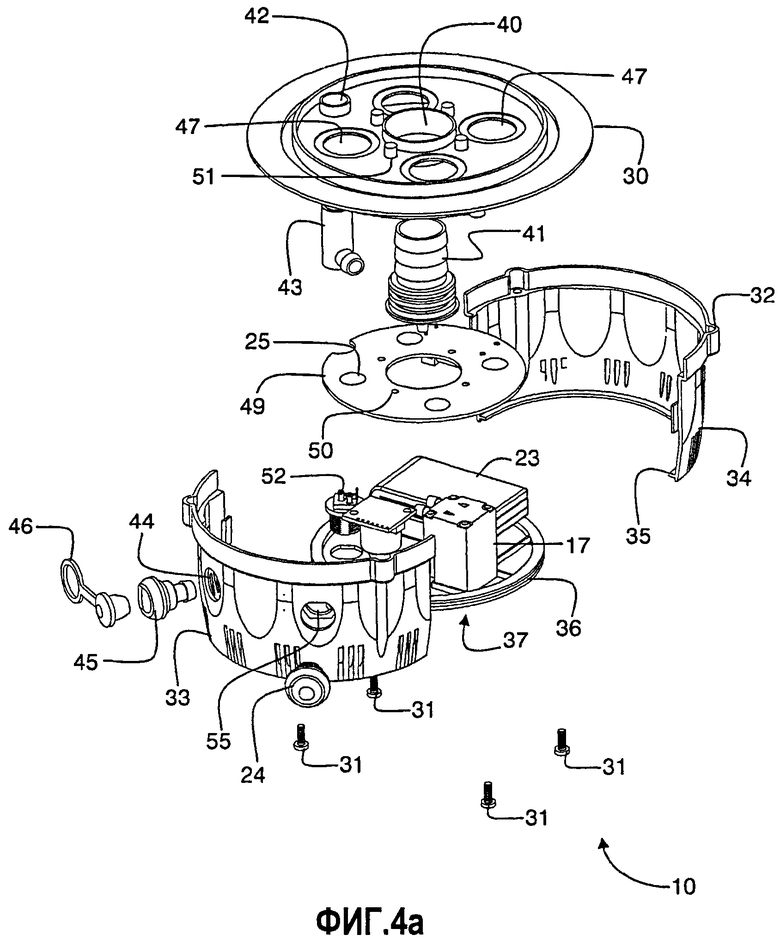
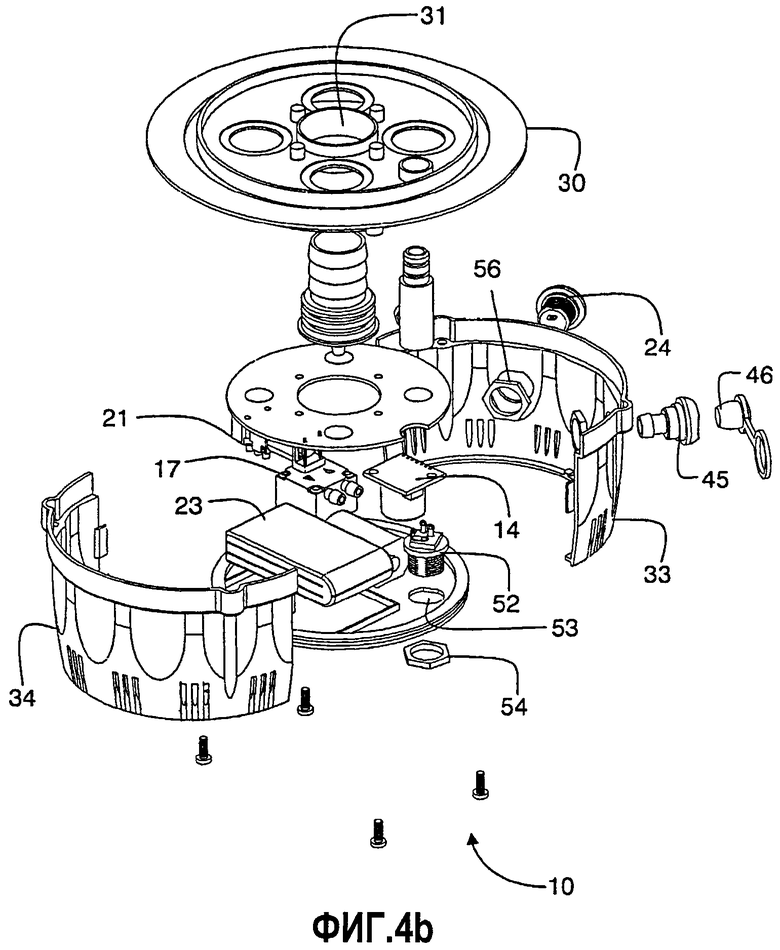
фиг.4a и 4b - виды в перспективе с пространственным разделением деталей, видимые с противоположных сторон системы управления в соответствии с вариантом осуществления изобретения;
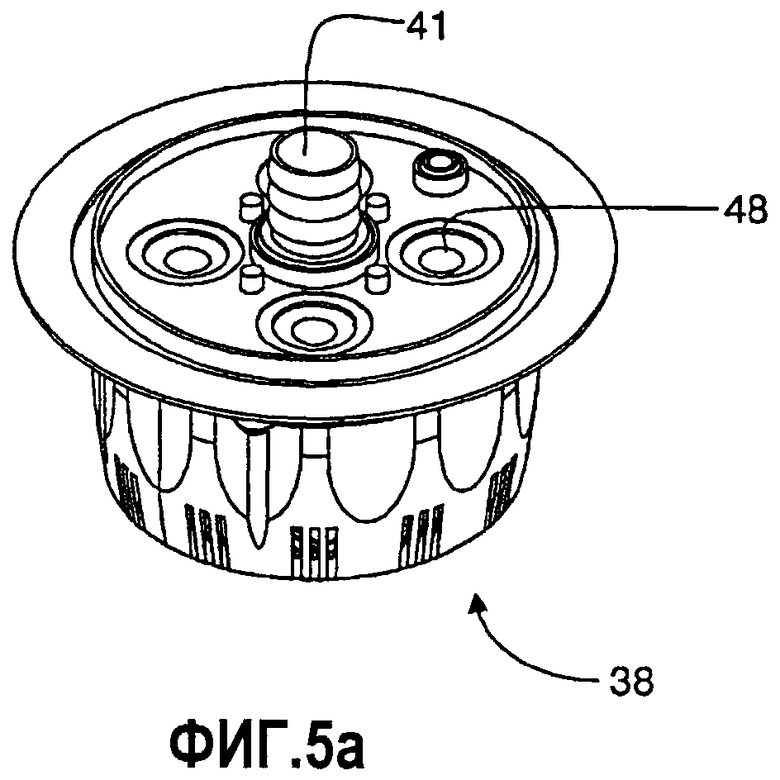
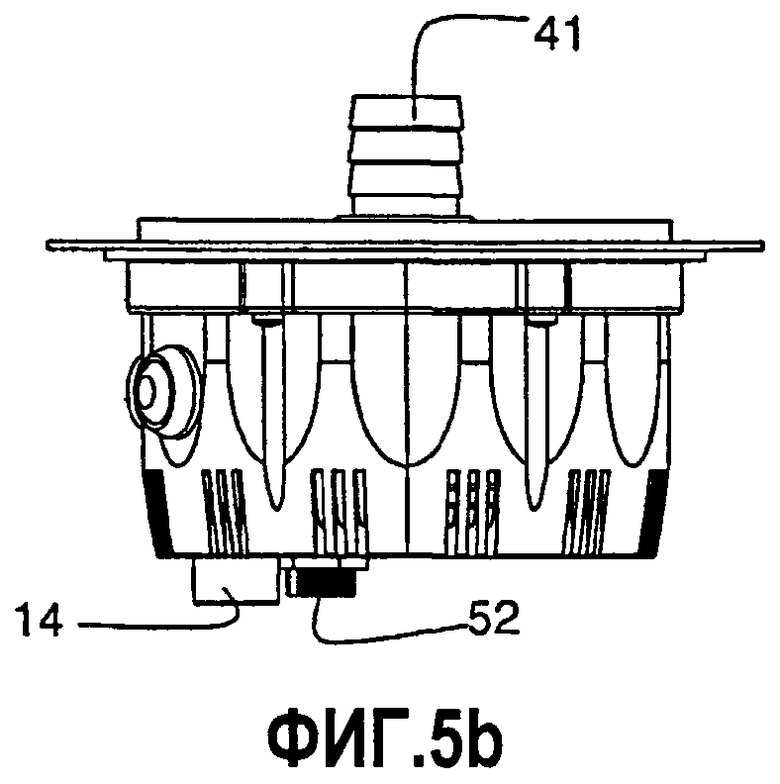
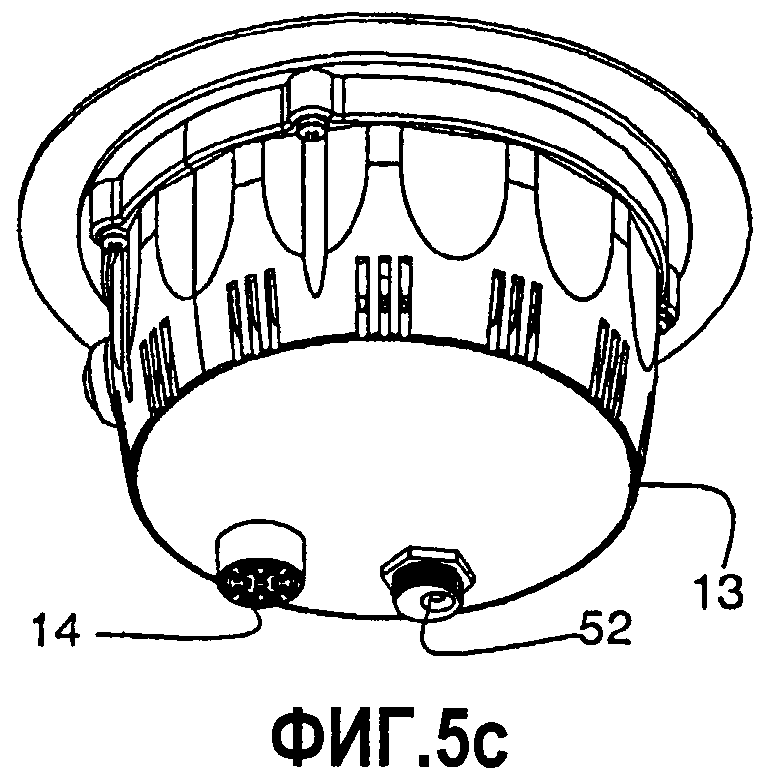
фиг.5a, 5b и 5c - виды в перспективе системы, показанной на фиг.4a и 4b;
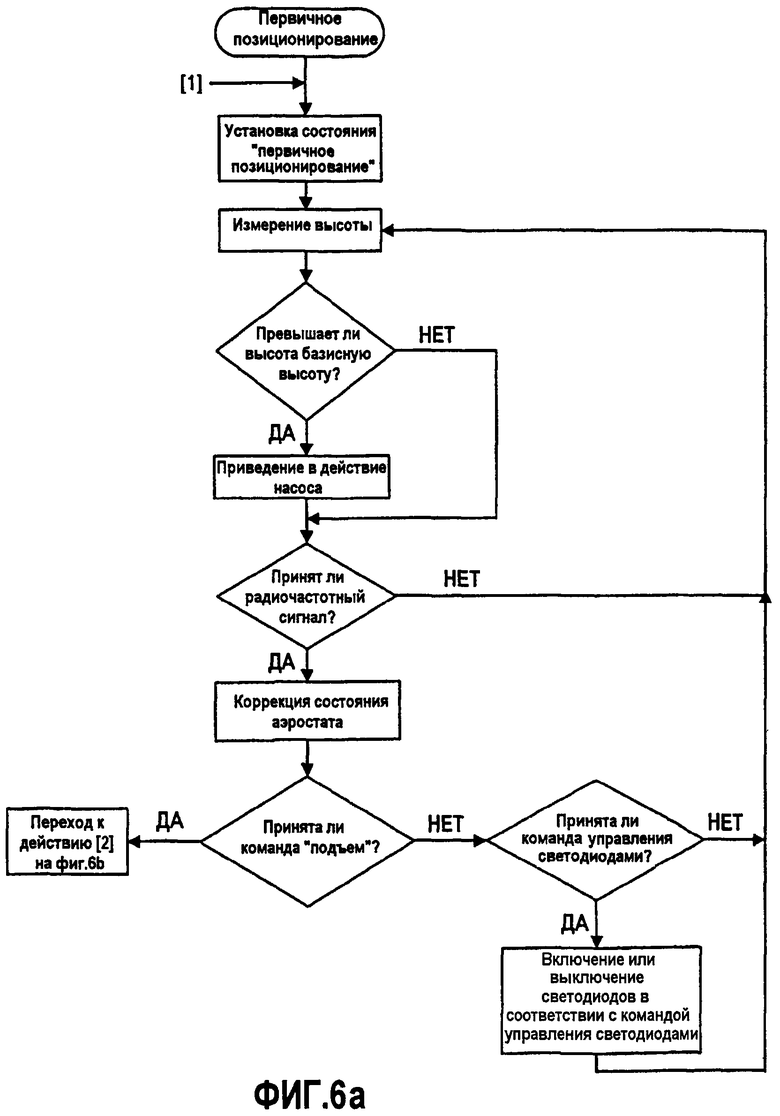
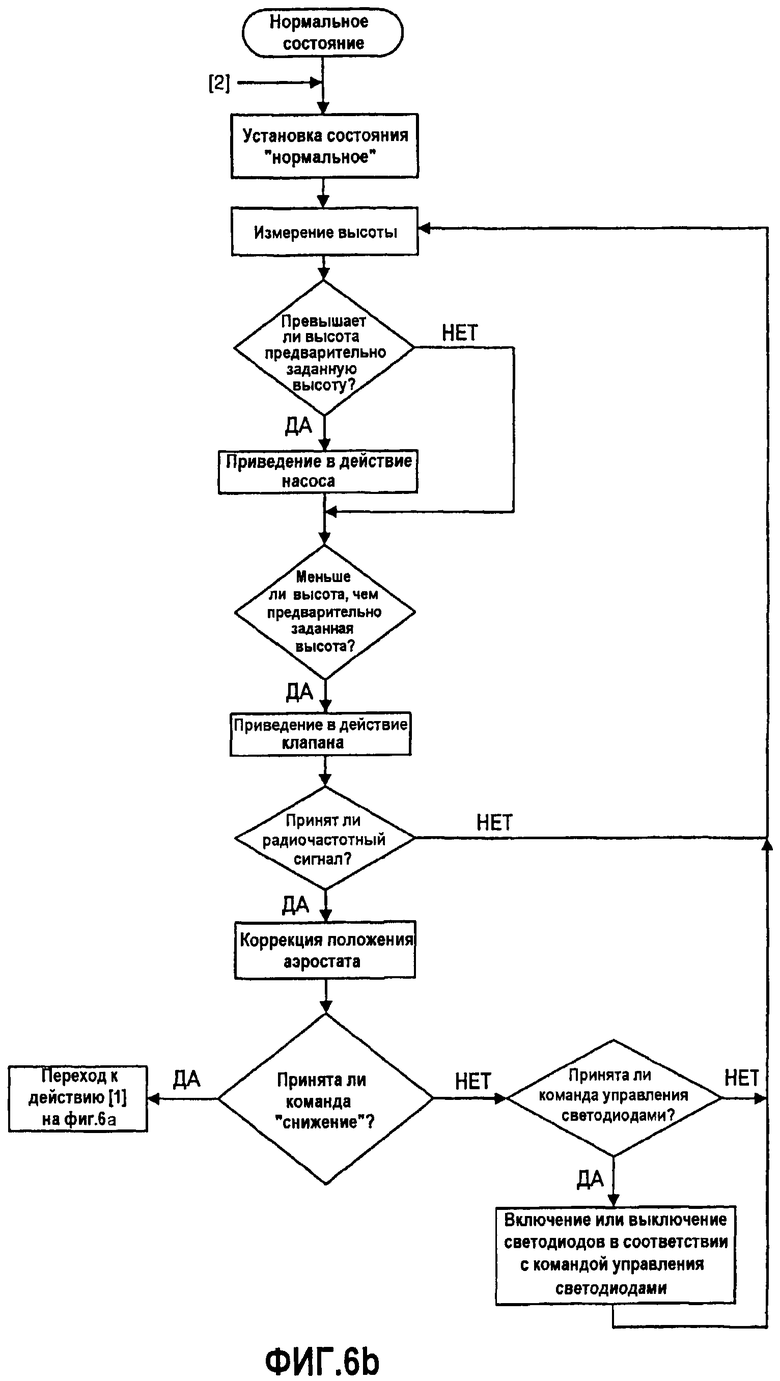
фиг.6a и 6b - блок-схемы последовательности операций, показывающие работу контроллера;
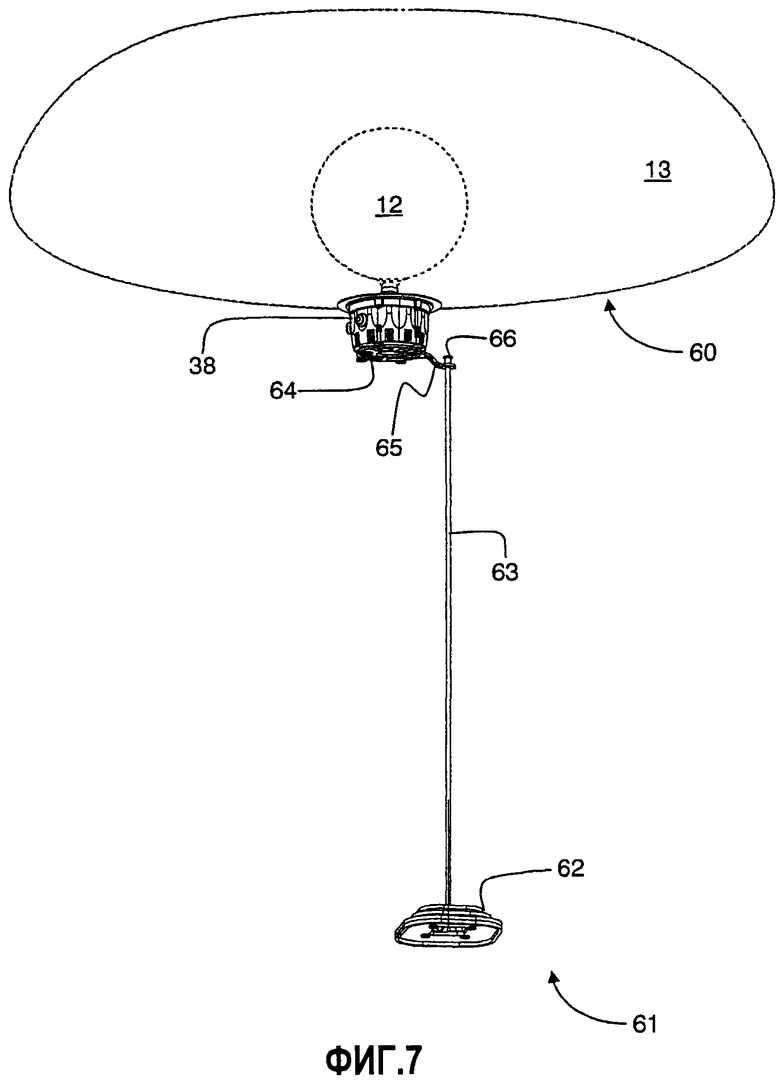
фиг.7 - иллюстрация устройства плавающей лампы с возможностью отсоединения, установленной на стойке;
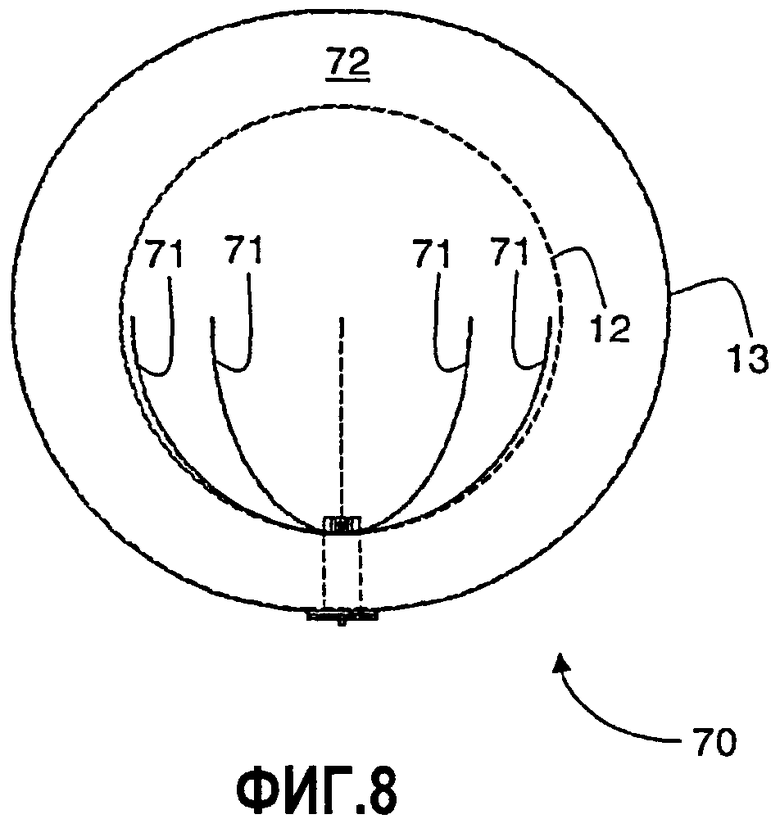
фиг.8 - схематичный вид несущей конструкции, имеющей преобразователь высоты согласно другому варианту осуществления изобретения; и
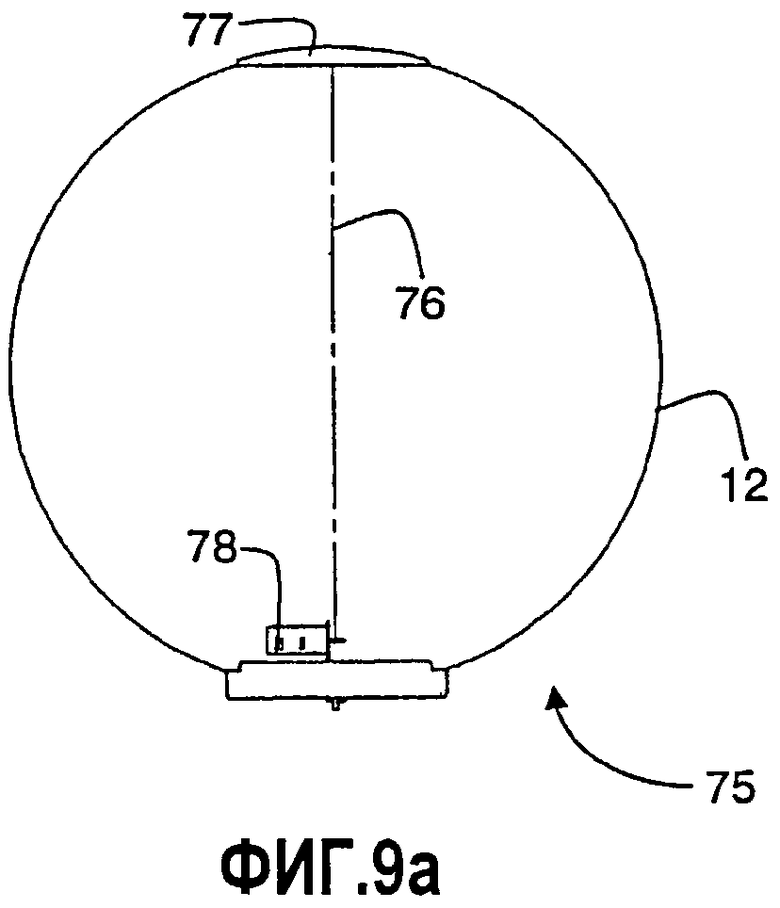
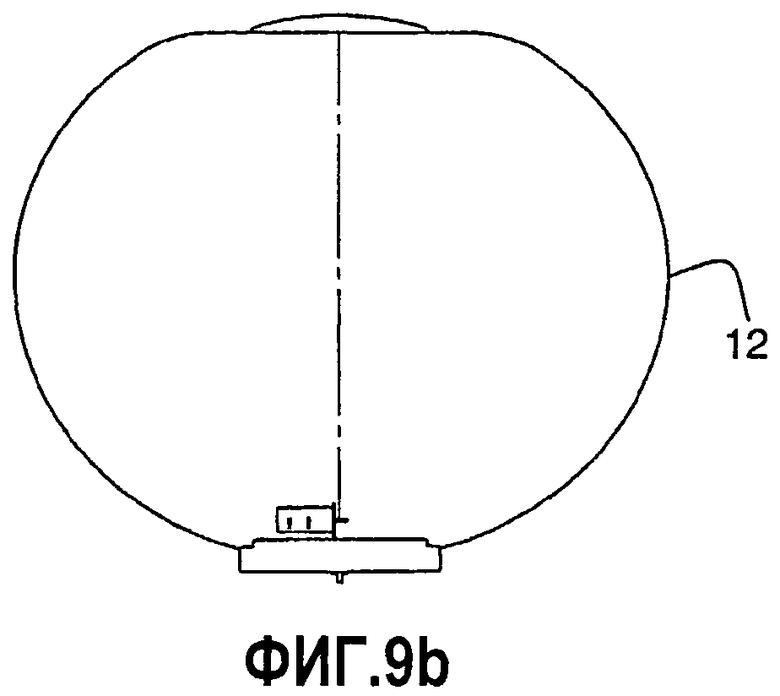
фиг.9a и 9b - схематичные виды несущей конструкции, имеющей преобразователь высоты согласно другому варианту осуществления изобретения.
Подробное описание вариантов осуществления изобретения
В нижеследующем описании элементы, которые показаны на разных чертежах, будут обозначены одинаковыми ссылочными позициями.
На фиг.1 показана функциональная схема системы 10 управления в соответствии с первым вариантом осуществления изобретения для регулирования высоты в пространстве несущей конструкции 11, схематично показанной на фиг.2a и 2b. Несущая конструкция 11 включает гибкий воздушный шар 12 (образующий полую оболочку), который в герметичном состоянии удерживается внутри внешней оболочки 13 (показанной на фиг.2a и 2b). Воздушный шар 12 содержит регулируемый объем первого газа, который окружен другим вторым газом внутри внешней оболочки. Обычно первый газ в воздушном шаре 12 является воздухом, и второй газ внутри внешней оболочки 13 является гелием. Датчик 14 высоты установлен совместно с опорной конструкцией 11 для генерирования сигнала высоты, который является функцией высоты несущей конструкции, и контроллер 15 соединен с датчиком 14 высоты и реагирует на сигнал высоты для автоматического регулирования объема и, следовательно, массы воздуха в эластичном надувном шаре 12 для поддержания плавучести несущей конструкции на заданной высоте.
В пределах контекста изобретения и прилагаемой формулы изобретения следует понимать, что термин "несущая конструкция" относится к платформе, которая является составляющей одно целое с объектом, который будет подниматься, а также к платформе, которая включает внутреннюю и внешнюю оболочки, а также к контроллеру, но допускает прикрепление к платформе внешнего объекта. В последнем случае контроллер должен быть готов к внешней калибровке пользователем для компенсации разности весов прикрепленных объектов. Когда объект и несущая конструкция представляют собой единое целое, контроллер может иметь заводскую установку в соответствии с известным комбинированным весом.
Несущая конструкция может включать висящие трехмерные игрушки и приспособления для детей, продукты дизайна интерьера, футляры для предметов роскоши или отображения предметов для коллекционеров предметов роскоши, или предметы для коллекционеров, или художественные произведения. Продукты для рекламной отрасли, такие как рекламные щиты, флаги, экраны и т.п., а также предметы аварийной сигнализации для спасения аналогично могут удерживаться с использованием принципов изобретения. Изобретение также может найти применение для удерживания таких предметов, как камеры для наблюдения и безопасности, особенно в очень больших пространствах или в районах, где доступ ограничен и нет инфраструктуры. Другим вариантом применения изобретения является удерживание таких объектов, как средства освещения кемпинга и средства аварийного освещения или освещения других объектов временного наружного развертывания, например, для строительства или технического обслуживания и ремонта (например, ремонта при автомобильной аварии в неосвещенном районе).
Регулирование высоты может достигаться в соответствии с рядом различных физических подходов, из которых только один характерный подход показан на фиг.1, где внешняя оболочка 13 жесткая и имеет достаточный объем, такой, что когда она заполнена гелием, обеспечивается достаточная плавучесть для удерживания несущей конструкции 11, включающей любой объект, удерживаемый ею в свободном пространстве. Как теперь будет описано, использование эластичного внутреннего надувного шара является только одной возможностью, так как также может использоваться гибкий внешний надувной. Во всех случаях результирующая плавучесть несущей конструкции регулируется преобразователем высоты на основе любого из нескольких физических свойств как функции высоты. Для достижения равновесия, когда несущая конструкция 11 висит в воздухе на номинально фиксированной высоте, воздух накачивается в воздушный шар 12 таким образом, что чем больше воздуха накачивается, тем больше он расширяется, как показано на фиг.2b, пока дополнительный вес воздуха не превысит подъемную силу гелия, таким образом, вызывая снижение несущей конструкции 11. Когда несущая конструкция 11 снижается ниже заданного уровня, что обнаруживается датчиком 14 высоты, клапан в линии подачи воздуха в воздушный шар 12 открывается для выпуска воздуха, таким образом уменьшая вес воздуха, пока подъемная сила гелия не превысит вес воздуха, когда клапан закрыт. Несущая конструкция 11 теперь поднимается, и цикл открытия и закрытия клапана непрерывно повторяется.
После описания основного принципа работы системы 10 управления теперь будет более полно описан вариант осуществления изобретения, показанный на фиг.1. Контроллер 15 имеет первый выход, который электрически соединен первым проводом 16 с насосом 17, соединенным первой секцией 18 трубопровода с входным отверстием 19 воздушного шара 12. Вторая секция 20 трубопровода, обычно соединенная с первой секцией 18, соединена с входом электромагнитного клапана 21, который электрически соединен вторым проводом 22 со вторым выходом контроллера 15 и приводится им в действие. Когда контроллер 15 выдает насосу 17 сигнал приведения в действие, окружающий воздух накачивается через трубопровод 18 в воздушный шар 12, тогда как, когда контроллер 15 выдает сигнал приведения в действие клапану 21, воздух выпускается из воздушного шара 12 в атмосферу через вторую секцию 20 трубопровода.
Контроллер 15 и связанная с ним электроника, а также насос 17 и клапан 21 питаются перезаряжающейся литиевой батареей 23 с полимерным электролитом на 11,1 вольт, которая соединена с контроллером 15 главным выключателем 24. При необходимости внешняя оболочка 13, показанная на фиг.2a, может быть, по меньшей мере, частично прозрачной и может иметь внутреннюю подсветку группой светодиодов 25, приводимых драйвером 26 питания светодиодов, который соединен с батареей 23 вспомогательным выключателем 27. При необходимости светодиодами 25 может независимо управлять контроллер 15 таким образом, что они служат индикатором высоты так, что когда, например, устройство поднимается, светится больше светодиодов, и когда оно снижается, светится меньше светодиодов, или наоборот.
Для подъема несущей конструкции 11 и любого прикрепленного к ней объекта из исходного положения, а также снижения ее на землю, когда необходимо, предпочтительно, чтобы контроллер 15 был приспособлен к дистанционному управлению. С этой целью с контроллером может быть связано устройство радиосвязи, такое как радиочастотный модуль 28, приспособленный для дистанционного управления через радиочастотный контроллер 29 (образующий контроллер дистанционного управления). Такие устройства известны и работают с частотой приблизительно 433 МГц на ограниченные расстояния, так что разрешение Федеральной комиссии связи (или аналога) не требуется. В качестве альтернативы могут использоваться другие режимы радиосвязи, такие как сотовая радиосвязь или блютус. Дистанционное управление может не требоваться в случаях, когда объект должен быть поднят в постоянное зафиксированное положение, например, когда он используется для исключительно декоративных целей или, возможно, для зафиксированных дисплеев, таких как указатели аварийного выхода, рекламные объявления и т.п. В таких случаях может быть применена градуированная шкала (не показана), соединенная с контроллером 15, имеющим шкалу, которая откалибрована как функция удерживаемого веса и желательной высоты. Шкала может быть задана в соответствии с весом прикрепленного объекта и высоты, на которую он должен быть поднят, для накачивания достаточного количества воздуха в воздушный шар 12 с точно правильным давлением для получения желательной плавучести. В качестве альтернативы, когда несущая конструкция составляет одно целое с объектом, шкала должна быть задана только в соответствии с высотой, так как вес несущей конструкции неизменен. В других вариантах осуществления изобретения внешняя калибровка не применяется, и контроллер предварительно установлен для подъема несущей конструкции на высоту, которая или задана производителем, когда несущая конструкция не несет внешний объект, или которая будет изменяться в зависимости от веса внешнего объекта, который несет несущая конструкция.
В варианте осуществления изобретения, показанном на фиг.2a и 2b, внешняя оболочка 13 жесткая и имеет фиксированный объем независимо от количества содержащегося в ней гелия, в то время как полая внутренняя оболочка 12 эластичная. В этом случае увеличение количества гелия во внешней оболочке увеличивает полную массу, но это имеет незначительное влияние на плавучесть аэростата. Таким образом, для фиксированной массы гелия во внешней оболочке регулирование высоты производится посредством изменения массы воздуха во внутреннем воздушном шаре.
На фиг.3a и 3b показана альтернативная конструкция, где и внешняя оболочка 13 и внутренняя полая оболочка 12 эластичные. Добавление гелия во внешнюю оболочку увеличивает ее массу и объем. Увеличение объема увеличивает плавучесть аэростата, которая поднимает аэростат, в то время как результирующее увеличение массы опускает аэростат. Таким образом, в этом варианте осуществления изобретения также доминирующим фактором управления является масса воздуха во внутреннем воздушном шаре, и любое изменение количества гелия во внешней оболочке менее значительно. В качестве альтернативы (не показано) только внешняя оболочка 13 может быть эластичной.
Во всех этих вариантах осуществления изобретения в качестве балластного газа используется атмосферный воздух таким образом, что внутренняя оболочка, в которую накачивается воздух или из которой он выпускается, служит балластным резервуаром для внешней оболочки, подобно балластным резервуарам, использующимся для регулирования плавучести подводной лодки. Это дает то преимущество, что не требуется соединения с насосом какой-либо внешней системы подачи газа. Однако для полноты описания следует отметить, что принцип изобретения также может быть применен наоборот, когда гелий используется в качестве балластного газа. В этом случае гелий может накачиваться во внутреннюю эластичную оболочку для увеличения плавучести и может выпускаться из нее для уменьшения плавучести. Это менее привлекательно, так как внешний источник гелия должен удерживаться несущей конструкцией и соединяться с входом насоса. Это увеличивает вес конструкции и приводит к расходу гелия, который, в отличие от окружающего воздуха, должен периодически пополняться.
Тем не менее, такой вариант осуществления изобретения может находить использование, когда требуется удерживание фиксированного легкого объекта таким образом, что требуемая плавучесть может обеспечиваться воздушным шаром малого объема. Может использоваться внешняя жесткая оболочка, фиксированный объем которой служит желательным объемом гелия для обеспечения заданной плавучести. В таком варианте осуществления изобретения заданная плавучесть достигается посредством накачивания гелия во внутреннюю оболочку, пока она не принимает форму внутреннего контура внешней оболочки. Пренебрегая каким-либо тонким регулированием, которое может требоваться для компенсирования колебаний температуры окружающей среды, объема гелия в оболочке достаточно для подъема объекта.
Кроме того, такой вариант осуществления изобретения может находить использование, когда на несущей конструкции находится небольшой баллон с гелием для запуска объекта посредством заполнения внешней камеры гелием, после этого регулирования высоты посредством накачивания воздуха во внутренний воздушный шар или откачивания воздуха из него, как описано выше. Несущая конструкция может быть складной таким образом, что после запуска или с земли, или с воздуха, гелий выпускается из баллона с гелием во внешнюю оболочку, таким образом вызывая накачивание внешней оболочки и развертывание несущей конструкции. В случае необходимости пустой баллон для гелия тогда может автоматически сбрасываться.
На фиг.4 и 5 показаны иллюстративные виды системы 10 управления в соответствии с одним вариантом осуществления изобретения. Несущая конструкция 11 включает круговую верхнюю пластину 30, вокруг периферии которой приварена внешняя оболочка (не показана на этих фигурах) таким образом, что периферия обеспечивает газонепроницаемое уплотнение. В нижней поверхности верхней пластины 30 сформированы резьбовые отверстия (не показаны) для ведущих винтов 31, которые вставляют в отверстия 32, доступные от внешней поверхности пары противоположных полуцилиндрических боковых частей 33 и 34 для прикрепления боковых частей 33 и 34 к нижней поверхности верхней пластины 30. На внутренней поверхности каждой из боковых частей 33 и 34 на их нижних краях сформированы соответствующие дугообразные периферийные кромки 35, входящие в зацепление с круговым пазом 36 в базовой пластине 37. При сборке контроллер 15 (показанный на фиг.1) и связанные с ним компоненты устанавливают на базовой пластине 37, после чего боковые части 33 и 34 устанавливают относительно базовой пластины и затем прикрепляют винтами 31 к верхней пластине 30, формируя в целом цилиндрический кожух 38 (показанный на фиг.5a), вершина которого удерживает внешнюю оболочку 13.
Верхняя пластина 30 включает центральное отверстие 40, через которое с уплотнением вставляется соединитель с коническими ребрами 41, на который устанавливается эластичный воздушный шар, таким образом позволяя накачивать воздух во внутренний эластичный воздушный шар 12 или выпускать воздух из него. Отверстие 42 в верхней пластине 30 соединено с газовпускным патрубком 43, который проходит через отверстие 44 в боковой части 33 и заканчивается наконечником 45, соединенным с газовпускным патрубком 43 трубкой (не показана). Газовпускной патрубок 43 позволяет накачивать гелий из внешнего источника во внешнюю оболочку, после чего наконечник 45 затыкают пробкой 46 для предотвращения утечки гелия. В качестве альтернативы наконечник 45 может представлять собой однопутевой пневмораспределитель и в таком случае пробки 46 не требуется.
В верхней пластине 30 также сформировано множество утопленных отверстий 47, в которые с уплотнением вставляются соответствующие линзы 48, показанные на фиг.5a. Линзы 48 пропускают свет от светодиодов 25 во внешнюю оболочку 13, которая, по меньшей мере, частично прозрачна, для излучения света светодиодов. Светодиоды 25 установлены на верхней поверхности двухсторонней печатной платы 49, имеющей отверстия 50, через которые печатную плату привинчивают посредством соответствующих резьбовых отверстий 51 в верхней пластине 30. На фиг.4a и 4b также показаны датчик 14 высоты, насос 17 и батарея 23, а также разъем 52 для зарядного устройства, обеспечивающий соединение внешнего зарядного устройства для перезарядки батареи 23. Разъем 52 для зарядного устройства проходит через отверстие 53 в базовой пластине 37 и закреплен гайкой 54. Главный выключатель 24 вставлен в отверстие 55 и закреплен гайкой 56 внутри боковой части. Первая секция 18 трубопровода, показанного на фиг.1, соединена одним концом с выходом насоса 17, и ее противоположный конец соединен с соединителем с коническими ребрами, который сопрягается с соединителем 41, в который он вставлен. Вторая секция 20 трубопровода соединена одним концом с входным отверстием электромагнитного клапана 21, и ее противоположная часть ответвляется от первой секции 18, как показано на фиг.1. Трубопровод не показан на фиг.4a и 4b, чтобы не затенять другие показанные там компоненты.
В практических вариантах осуществления изобретения датчик 14 высоты способен измерять высоту до 50 м с погрешностью не больше ±1 м. Контроллер 15 реагирует на первый опорный сигнал, показательный для желательной заданной высоты для запуска несущей конструкции на эту высоту. После этого контроллер 15 может реагировать на второй опорный сигнал, показательный для допустимой разности между мгновенной высотой и заданной высотой для поддержания высоты в пределах указанного диапазона. Опорные сигналы могут быть заданы с внешним возбуждением и могут постоянно изменяться блоком дистанционного управления.
В прототипе указанного выше варианта осуществления изобретения, который доведен до практического применения, датчик высоты был акустическим дальномером типа LV-MaxSonar®-EZ3™, производимым MaxBotix® Inc. of Arizona, USA. Насос был насосом диафрагменного типа со щеточным электродвигателем на 9 вольт CTS А.1C25N1.C09VDC, производимым Hargraves of North Carolina, USA, и электромагнитный клапан был клапаном типа 75 Magnum на 5 вольт, 2 ватта, 15 фунтов на квадратный дюйм, также производимым Hargraves. Акустический дальномер LV-MaxSonar®-EZ3™, вид которого показан на фиг.5b и 5c, обнаруживает объект на расстоянии от 0 до 6,45 м с разрешением 25,4 мм.
На фиг.6a и 6b изображены блок-схемы последовательности операций, показывающие работу контроллера 15 в конструкции, показанной на фиг.2a и 2b. Для удобства контроллер 15 работает в соответствии с двумя разными состояниями. На фиг.6a показана установка в исходное положение, которая выполняется до достижения воздушным шаром 12 установившегося состояния, например, когда устройство поднимается впервые из его неактивного состояния. В этом состоянии внешняя оболочка 13 заполнена гелием, и внутренний воздушный шар 12 фактически пуст. Предпочтительно, чтобы регулирование с обратной связью вступало в действие только во время неконтролируемого подъема аэростата, поскольку если бы аэростат был запущен с недостаточным количеством воздуха, он мог бы улететь значительно за пределы желательной высоты прежде, чем будет достаточно веса воздуха для его снижения. Это нежелательно по двум причинам. Во-первых, в течение короткого периода времени до получения достаточного количества воздуха во внутреннем воздушном шаре устройство является неуправляемым. Во-вторых, если устройство улетит слишком высоко, может существовать риск того, что оно выйдет за пределы дальности действия датчика высоты. Единственный способ восстановления управления может состоять в том, чтобы заставлять устройство снижаться с использованием дистанционного управления посредством постепенного добавления воздуха во внутренний воздушный шар, так как если во внутренний воздушный шар будет накачано слишком много воздуха, существует риск того, что внутренний воздушный шар разорвется. В действительности, установка в исходное положение позволяет управлять воздушным шаром независимо от регулирования с обратной связью, обеспечиваемого датчиком высоты, пока устройство не достигнет установившегося состояния, когда регулирование с обратной связью будет доступно.
Таким образом, как показано на фиг.6a, контроллер определяет, находится ли устройство выше заданной базисной высоты, которая установлена на преднамеренно низком уровне, на котором контроллер определяет, что устройство находится слишком высоко. Это приводит к активизированию контроллером насоса для заполнения воздушного шара. Это может быть осуществлено даже при удерживании устройства для предотвращения его подъема под действием плавучести заполненной гелием внешней оболочки. Когда во внутреннем воздушном шаре находится достаточное количество воздуха, состояние может быть изменено с использованием радиочастотного управления, после чего осуществляется переход к нормальному состоянию, как показано на фиг.6b, которая показывает простой механизм обратной связи, когда высота сравнивается с заданной желательной высотой. Если высота больше заданной высоты, насос активизируется для накачивания большего количества воздуха во внутреннюю оболочку, таким образом, вызывая снижение устройства. Если высота меньше заданной высоты, приводится в действие клапан для выпуска воздуха из внутреннего надувного шара, таким образом вызывая подъем устройства.
В обоих состояниях радиочастотный контроллер в состоянии изменять текущее состояние и это используется для спуска устройства на землю из установившегося состояния. Он также может использоваться для управления светодиодами, когда устройство является плавучей лампой, таким образом, что клапан может включаться и выключаться без необходимости возвращать ее вниз на уровень земли. Однако, как указано выше, светодиоды могут использоваться в качестве индикаторов высоты, когда количество светодиодов, которые светятся, может использоваться для указания высоты. В качестве альтернативы могут светиться светодиоды разного цвета в зависимости от измеренной высоты. В случае когда светодиоды используются в качестве видимых индикаторов высоты, они могут дополнять светодиоды, используемые в качестве основного источника освещения.
Работа устройства, показанного на фиг.4 и 5, основана на известных уравнениях состояния газа и описана подробно в нашем более раннем документе WO 07/036930. Его описание здесь не повторяется, во-первых, поскольку оно известно, и, более существенно, поскольку знания фактической физики не требуется для контроллера, соответствующего настоящему изобретению. Это действительно является тем, что радикально отличается от устройства, описанного в документе WO 07/036930. Причина этого состоит в том, что в документе WO 07/036930 нет описания контроллера и механизма обратной связи, и регулирование высоты достигается при помощи предварительно откалиброванного клапана регулирования давления. В таком случае клапан регулируется производителем для регулирования давления гелия в плавучем надувном шаре до правильной величины в зависимости от предполагаемых условий окружающей среды для получения плавучести, достаточной для подъема объекта заданного веса. Это не позволяет удерживать объекты разного веса на желательной заданной высоте. В качестве альтернативы может применяться шкала, которая откалибрована в единицах, эквивалентных добавленной массе, для обеспечения удерживания объектов разного веса на желательной заданной высоте посредством регулирования шкалы.
Однако эти условия не применяются согласно настоящему изобретению, где контроллер регулирует преобразователь высоты (такой как составленный насосом и выпускным клапаном, показанными на фиг.1) просто на основе того, является ли мгновенная высота устройства меньшей или большей, чем заданная высота. В действительности, в описанном выше варианте осуществления изобретения плавучесть внешней оболочки неизменна, и регулирование высоты достигается посредством изменения веса воздуха во внутреннем воздушном шаре. При этом номинальная высота, на которую будет подниматься несущая конструкция данного веса, требует понимания физики. Таким образом, размеры внутренней и внешней оболочек, которые регулируют объем гелия внутри внешней оболочки и противодействующий вес воздуха во внутренней оболочке, очевидно, должны быть подобраны в зависимости от комбинированного веса несущей конструкции. Далее следует относящаяся к делу теория, которая определяет расчеты конструкции.
При равновесии направленная вверх сила плавучести, воздействующая на несущую конструкцию и любой прикрепленный объект, точно уравновешена весом. Внешняя оболочка плавает в воздухе, и, таким образом, сила ее плавучести задана как:

где VT - это объем внешней оболочки;



Противодействующий вес задан как:

Таким образом, для удерживания объекта, имеющего массу 0,3 кг:

применяя универсальное уравнение состояния газа:

Таким образом, плотность воздуха дана как:
Аналогично плотность гелия дана как:
Предполагая, что воздух имеет следующие свойства:
TAir = 15°C (то есть 288 K);
PAir = 101325 Па (то есть атмосферное давление);
RAir = 287,05 Дж кг-1 K-1,
Уравнение (6) дает:

Предполагая, что температура гелия аналогична температуре воздуха и что ее давление немного выше давления воздуха, например 110000 Па, то есть:
THe = 15°C (то есть 288 K);
PHe = 110000 Па (то есть немного больше атмосферного давления);
RHe = 2077 Дж кг-1 K-1,
Уравнение (7) дает:

Масса воздуха во внутреннем воздушном шаре задана как:
Аналогично масса гелия во внешней оболочке задана как:

Подстановка этих величин в уравнение 3 дает:

Как указано выше, воздух служит только балластом для точного регулирования плавучести плавучей конструкции. Таким образом, предположим, что на некоторой начальной высоте устройство будет плавучим даже без воздуха во внутреннем воздушном шаре, то есть 

то есть
давая:
Предполагая для простоты, что внешняя оболочка является сферической, такой что ее объем задан как:

ее радиус R тогда задан как:
Другими словами, для достижения плавучести для легкой системы, имеющей номинальную массу 300 г, сферическая внешняя оболочка должна иметь минимальный диаметр 0,82 м, и масса гелия во внешней оболочке должна быть равна 
На фиг.7 изображено такое устройство в форме плавающей лампы 60 с возможностью отсоединения установленной на стойке 61. Стойка 61 имеет опорную часть 62, удерживающую трубчатую стойку 63. Цилиндрический кожух 38 осветительного устройства 60 съемно установлен внутри гнезда 64 со стороны, на которой выходит фурнитура 65, имеющая часть с отверстием, которая может перемещаться вверх и вниз по стойке 63, но не может сорваться благодаря удерживающей крышке 66, расположенной на верхней части стойки.
Перед использованием внешнюю оболочку 13 заполняют гелием, и цилиндрический кожух 38 осветительного устройства 60 устанавливают в гнездо 64. Гнездо 64 может иметь разнесенные по кругу упругие пальцы, которые захватывают боковую стенку кожуха 38 и которые могут отклоняться для освобождения лампы. Плавучесть конструкции вызывает перемещение вверх устройства 60 по стойке, при этом оно удерживается от отрыва удерживающей крышкой 66. При дистанционном радиочастотном управлении воздух накачивается во внутренний воздушный шар 12 последовательностью импульсов для его постепенного накачивания. Когда достаточное количество воздуха заполняет внутреннюю оболочку, увеличенная масса противодействует плавучести конструкции, которая начинает постепенно опускаться по стойке 63. Осветительное устройство 60 тогда может быть безопасно освобождено из гнезда 64, и масса воздуха во внутреннем воздушном шаре может регулироваться дистанционным радиочастотным управлением для подъема или снижения устройства, как требуется.
Хотя контроллер 15 показан на фиг.1 как выделенное устройство для использования с одной несущей конструкцией, изобретение также предусматривает использование дистанционного контроллера, который управляет множеством устройств. В таком случае каждая несущая конструкция содержит память, которая хранит уникальный идентификатор. Каждое устройство сообщается с контроллером с использованием пригодного протокола двусторонней связи, который может, например, распределять каждое устройство с неперекрывающимися временными интервалами для исключения столкновений. В качестве альтернативы лучшее использование рабочего цикла может быть достигнуто посредством распределения случайных временных интервалов и коррекции относительно потерянных передач вследствие конфликта данных. Такие протоколы, по сути, известны и сами по себе не являются признаком изобретения. Для полноты описания может быть сделана ссылка на патент США № 6600899 (Elpas Electro-Optic Systems Ltd., Ra'anana, Israel), который описывает способ и систему для осуществления двустороннего обмена данными между приемопередатчиком объекта и считывающим устройством и содержание которого включено сюда в качестве ссылочного материала.
При необходимости множество устройств, которыми управляет дистанционный контроллер, могут быть взаимно синхронизированы для участия в скоординированной схеме. Например, рядом плавучих ламп, показывающих разные буквы, можно управлять таким образом, что дистанционное управление для каждой лампы может использоваться для генерирования скоординированного сообщения или рекламы. Например, каждая лампа может быть поднята на желательную заданную высоту и затем освещена в течение контролируемого времени; светящиеся лампы могут подниматься и снижаться для создания движущихся сообщений и так далее. Аналогично этому в варианте применения для обеспечения безопасности множество несущих конструкций может использоваться для удерживания камеры, которая используется для отображения определенного района. Модуль дистанционного управления позволяет регулировать зону наблюдения посредством соответствующего управления составляющими несущими конструкциями.
В варианте осуществления изобретения, описываемом до сих пор, внешняя оболочка представляет собой жесткую оболочку, заполненную гелием, и внутренняя оболочка содержит воздух, который служит балластом. Однако следует отметить, что этот вариант осуществления изобретения представляет всего лишь один возможный подход. Таким образом, при необходимости внешняя оболочка может быть заполнена воздухом, и плавучесть устройства может регулироваться посредством добавления гелия во внутренний надувной шар или выпуска гелия из него. В таком случае внешняя оболочка также будет жесткой. В качестве альтернативы внешняя оболочка может быть эластичной, и плавучесть устройства может изменяться посредством изменения объема гелия в ней.
Все эти подходы основаны на изменении отношения между объемом воздуха и гелия для изменения плавучести плавучей конструкции. В частности, преобразователь высоты, показанный на фиг.1, составлен насосом 17 и клапаном 21 и регулирует объем и, следовательно, массу газа в эластичном надувном шаре как функцию высоты. Но так как универсальное уравнение состояния газа относится к давлению (P), объему (V) и температуре (Т) таким образом, что PV/T остается постоянным независимо от изменения любой из этих характеристик, плавучесть также может регулироваться с использованием высотных преобразователей, которые зависят или от температуры или от давления.
На фиг.8 схематично показан преобразователь высоты 70, который работает для регулирования температуры газа внутри жесткой полой оболочки 12, при этом газ является газом легче воздуха, в наиболее типичном случае - гелием. Нагревательные элементы 71 нагревают находящийся в ней газ, делая его менее плотным, чем окружающий газ, который обычно является воздухом, таким образом, что устройство поднимается. В этом варианте осуществления изобретения нет технической потребности во внешней оболочке. Однако на практике предпочтительно, чтобы оболочка 12 была заключена во внешнюю оболочку 13 и чтобы пространство между ними было заполнено теплоизолирующим материалом 72. Когда нагревательные элементы 61 выключены, газ охлаждается, и плавучесть оболочки 12 уменьшается таким образом, что устройство опускается. Эффект может быть увеличен посредством более активного охлаждения газа внутри оболочки 12 с применением небольшого охлаждающего устройства, такого как термоэлектрическое охлаждающее устройство.
В этом варианте осуществления изобретения контроллер 15 реагирует на снижение полой оболочки 12 ниже заданной высоты для включения нагревательных элементов 71, чтобы увеличить плавучесть полой оболочки, и реагирует на подъем полой оболочки выше заданной высоты для выключения нагревательных элементов 71, таким образом, позволяя газу охлаждаться и уменьшать плавучесть полой оболочки.
Конечно, будет понятно, что регулирование высоты аэростата посредством нагревания газа, по сути, известно и долго использовалось в монгольфьерах. Однако монгольфьеры обычно управляются вручную пилотом, который управляет высотой судна, регулируя поток горячего воздуха в аэростат. В отличие от этого, настоящее изобретение предусматривает работу без ручного управления с использованием бортового контроллера для автоматического удерживания устройства на заданной высоте.
На фиг.9a и 9b схематично показан преобразователь 75 высоты, который работает для регулирования объема газа внутри жесткой оболочки 12, при этом газ, который легче воздуха, в типичном случае является гелием. "Жесткая" означает, что оболочка не является эластичной, но способна пластически деформироваться. Таким образом, она не может накачиваться как аэростат, но ее объем может быть уменьшен посредством приложения силы, которая сжимает или иначе стягивает стены оболочки таким образом, что ослабление силы восстанавливает форму и объем оболочки до ее исходного состояния. В этом случае преобразователь высоты включает шнур 76 внутри полой оболочки, первый конец которого прикреплен к внутренней стенке 77 полой оболочки, и второй конец которого соединен через электродвигатель 78 с контроллером 15. Контроллер приспособлен для изменения объема газа внутри полой оболочки в соответствии с измеренной высотой посредством регулирования натяжения шнура. Таким образом, когда полая оболочка опускается ниже заданной высоты, электродвигатель 78 уменьшает натяжение шнура 76, увеличивая объем газа внутри полой оболочки и таким образом увеличивая плавучесть полой оболочки. Когда полая оболочка поднимается выше заданной высоты, электродвигатель наматывает шнур 76, чтобы уменьшить объем газа внутри полой оболочки и таким образом уменьшить плавучесть полой оболочки.
Шнур составляет устройство регулирования объема, регулирование которого служит для регулирования давления газа внутри гибкой надувной оболочки посредством приложения силы к стенке оболочки таким образом, чтобы сдувать или расширять оболочку. Следует понимать, что могут аналогично использоваться другие формы устройства регулирования объема или преобразователи высоты-давления. Например, жесткое соединение может быть эксцентрично соединено с электродвигателем для отталкивания внутренней стенки 67 от электродвигателя или ближе к электродвигателю.
Хотя описанные выше преобразователи высоты основаны на универсальном уравнении состояния газа, будет понято, что также может использоваться любой преобразователь высоты, который способен изменять переменные зависящие от высоты свойства газа внутри полой оболочки, как функцию измеренной высоты.
Будет также понято, что контроллер в соответствии с изобретением может быть соответственно запрограммированным процессором. Аналогично изобретение предусматривает использование компьютерной программы, считываемой процессором для управления контроллером. Изобретение также предусматривает машиночитаемую память, ясно осуществляющую программу команд, выполняемых контроллером для осуществления необходимого управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕЗБАЛЛАСТНЫЙ АЭРОСТАТИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2126342C1 |
| СОВОКУПНОСТЬ ВОЗДУШНЫХ ПЛАТФОРМ СВЯЗИ И СПОСОБ ИХ ИСПОЛЬЗОВАНИЯ | 2000 |
|
RU2257016C2 |
| СОЛНЕЧНО-ВЕТРЯНАЯ ЭЛЕКТРОСТАНЦИЯ ВЫСОТНОГО БАЗИРОВАНИЯ | 2014 |
|
RU2563048C1 |
| ПРИВЯЗНОЙ АЭРОСТАТ | 2001 |
|
RU2214346C2 |
| Космический лифт для доставки пассажиров и грузов с поверхности Земли или иной планеты на низкую орбиту и обратно и способ его строительства | 2019 |
|
RU2735441C1 |
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |
| КОМПЛЕКС АППАРАТУРЫ ДЛЯ ВОЗДУШНОГО НАБЛЮДЕНИЯ | 2013 |
|
RU2535381C1 |
| СПОСОБ ПОЛЕТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2410284C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОСАДКИ СУДНА ДЛЯ ПРОХОДА ПО МЕЛКОВОДЬЮ | 2019 |
|
RU2733021C1 |
| АЭРОСТАТИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2011 |
|
RU2511500C2 |
Изобретение относится к летательным аппаратам легче воздуха. Управляемая плавучая система (10) включает несущую конструкцию, имеющую герметичную полую оболочку (12), содержащую первый газ и окруженную вторым газом, представляющим первый или второй газ, которые легче окружающего воздуха. Полая оболочка предварительно заполнена первым газом через однопутевой пневмораспределитель, который предотвращает утечку первого газа, и датчик высоты (14). Преобразователь (17, 21, 61, 66, 67, 68) высоты, соединенный с полой оболочкой, реагирует на сигнал высоты для изменения плавучести несущей конструкции. Контроллер (15) соединен с датчиком высоты и с преобразователем высоты и реагирует на сигнал высоты и на один сигнал высоты отсчета для автоматического управления преобразователем высоты для поддержания плавучести несущей конструкции на заданной высоте. 2 н. и 24 з.п. ф-лы, 9 ил.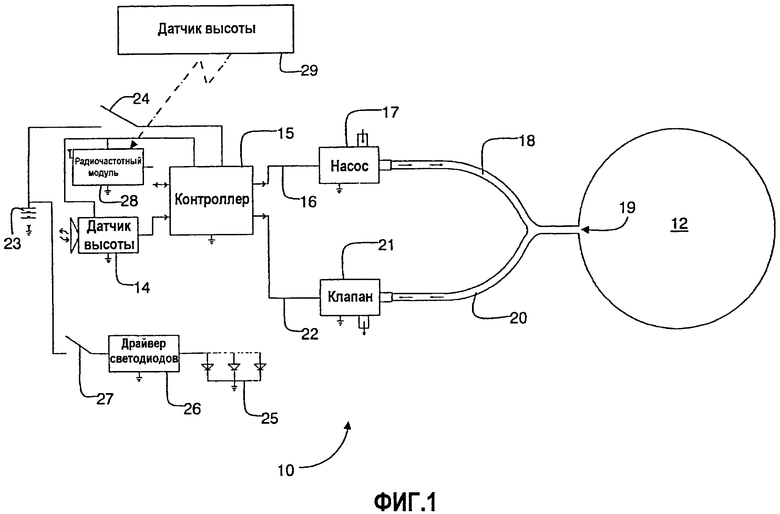
1. Управляемая плавучая система (10), содержащая:
несущую конструкцию (11), имеющую герметичную полую оболочку (12) для содержания первого газа, имеющего зависимые от высоты свойства, который используется для изменения плавучести несущей конструкции, и окруженную вторым газом таким образом, что или первый газ, или второй газ легче окружающего воздуха, при этом указанная полая оболочка предварительно заполнена указанным первым газом через однопутевой пневмораспределитель, который предотвращает утечку первого газа из полой оболочки,
датчик (14) высоты для генерирования сигнала высоты, отображающего высоту несущей конструкции,
преобразователь (17, 21, 61, 66, 67, 68) высоты, реагирующий на сигнал высоты для изменения плавучести несущей конструкции посредством изменения переменных зависящих от высоты свойств первого газа внутри полой оболочки как функции измеренной высоты, и
контроллер (15), соединенный с датчиком высоты и с преобразователем высоты и реагирующий на указанный сигнал высоты и, по меньшей мере, один сигнал высоты отсчета для автоматического управления преобразователем высоты для поддержания плавучести несущей конструкции на заданной высоте;
отличающаяся тем, что:
датчик высоты способен измерять высоту до 50 м с ошибкой не более ±1 м, и
контроллер приспособлен для управления системой (10) независимо от управления с обратной связью, обеспечиваемой датчиком высоты, в ходе фазы первичного позиционирования для обеспечения управления системой в рабочем диапазоне датчика высоты.
2. Система по п.1, в которой, по меньшей мере, один сигнал высоты отсчета включает первый опорный сигнал, показательный для желательной заданной высоты.
3. Система по п.1 или 2, в которой, по меньшей мере, один сигнал высоты отсчета включает второй опорный сигнал, показательный для допустимой разности между мгновенной высотой и заданной высотой.
4. Система по п.1 или 2, в которой:
полая оболочка эластичная и расположена внутри внешней оболочки, содержащей указанный второй газ,
первый газ служит балластом, и
контроллер реагирует на сигнал высоты для регулирования массы первого газа в полой оболочке для поддержания плавучести несущей конструкции на указанной заданной высоте.
5. Система по п.1, в которой:
преобразователь высоты включает, по меньшей мере, один электрический нагревательный элемент (61) внутри полой оболочки, и
контроллер реагирует на спуск несущей конструкции ниже указанной заданной высоты для нагревания первого газа для увеличения плавучести полой оболочки и реагирует на подъем несущей конструкции выше указанной заданной высоты, выпуская первый газ для охлаждения для уменьшения плавучести полой оболочки.
6. Система по п.5, в которой:
контроллер приспособлен для охлаждения первого газа посредством выключения, по меньшей мере, одного электрического нагревательного элемента для пассивного охлаждения первого газа.
7. Система по п.5, также включающая:
охлаждающее устройство для активного охлаждения первого газа;
контроллер, приспособленный для охлаждения первого газа посредством включения охлаждающего устройства в дополнение к выключению, по меньшей мере, одного электрического нагревательного элемента.
8. Система по п.1, в которой:
полая оболочка по существу жесткая,
преобразователь высоты включает устройство (66) регулирования объема внутри полой оболочки для соединения стенки (67) полой оболочки с контроллером, и
контроллер реагирует на снижение несущей конструкции ниже указанной заданной высоты для регулирования устройства регулирования объема для увеличения объема газа внутри полой оболочки и, таким образом, увеличения плавучести полой оболочки, и реагирует на подъем несущей конструкции выше указанной заданной высоты для регулирования устройства регулирования объема таким образом, чтобы уменьшать объем газа внутри полой оболочки и, таким образом, уменьшать плавучесть полой оболочки.
9. Система по п.8, в которой:
устройство регулирования объема представляет собой шнур, первый конец которого прикреплен к внутренней стенке полой оболочки, и второй конец которого соединен с контроллером, и
контроллер приспособлен для изменения объема газа внутри полой оболочки посредством регулирования натяжения шнура.
10. Система по п.9, в которой шнур (61) соединен с контроллером (15) через электродвигатель (68), который приводится в действие контроллером для наматывания или сматывания шнура таким образом, чтобы увеличивать или уменьшать, соответственно, натяжение шнура.
11. Система по п.1, в которой:
полая оболочка эластичная,
насос (17) соединен с газовпускным патрубком полой оболочки через выпускной клапан (21), и
контроллер реагирует на сигнал высоты для накачивания второго газа в полую оболочку для надувания полой оболочки или для открытия выпускного клапана для сдувания полой оболочки.
12. Система по любому из пп.1, 2 и 5-11, автономно питающаяся батареей (25).
13. Система по любому из пп. 1, 2 и 5-11, питающаяся излучением, поступающим к электрическому устройству.
14. Система по п.13, питающаяся солнечными батареями.
15. Система по любому из пп. 1, 2, 5-11 и 14, в которой несущая конструкция служит платформой для удерживания прикрепленного объекта.
16. Система по любому из пп. 1, 2, 5-11 и 14, имеющая селектор, соединенный с контроллером для установки заданной высоты.
17. Система по любому из пп. 1, 2, 5-11 и 14, также включающая блок (28) дистанционного управления, соединенный с контроллером для дистанционного включения контроллера, причем указанный блок дистанционного управления приспособлен для стабилизации несущей конструкции (11) и любого прикрепленного к нему объекта на любой заданной высоте в пределах диапазона действия датчика высоты.
18. Система по п.17, в которой блок дистанционного управления является радиочастотным модулем (28).
19. Система по любому из пп. 1, 2, 5-11, 14 и 18, в которой контроллер приспособлен для выполнения фазы первичного позиционирования, пока несущая конструкция не достигнет установившегося состояния, и затем выполнения фазы регулирования для поддержания желательной заданной высоты несущей конструкции.
20. Система по п.17, в которой несущая конструкция (11) идентифицируется по уникальному идентификатору, и контроллер реагирует на уникальный идентификатор для ассоциирования принятого сигнала высоты с несущей конструкцией и для посылки управляющих сигналов преобразователю высоты в несущей конструкции, таким образом, допуская дистанционное управление больше, чем одной несущей конструкцией, блоком (29) дистанционного управления.
21. Система по п.20, включающая множество несущих конструкций, каждая из которых содержит соответствующий контроллер, при этом все контроллеры взаимно синхронизированы.
22. Система по любому из пп. 1, 2, 5-11, 14, 18, 20 и 21, в которой датчик высоты приспособлен для измерения высоты от 0 до 6,45 м с разрешением меньше 100 мм.
23. Система по любому из пп. 1, 2, 5-11, 14, 18, 20 и 21, имеющая комбинированную массу меньше 5 кг.
24. Способ подъема системы по п.1 на указанную заданную высоту, содержащий:
определение базисной высоты, которая меньше, чем желательная заданная высота;
во время фазы первичного позиционирования использование базисной высоты как исходного значения для контроллера таким образом, что контроллер делает вывод, что устройство находится слишком высоко и активизирует преобразователь высоты для накачивания воздуха в полую оболочку (12); и
переключение на фазу регулирования, когда в полой оболочке находится достаточное количество воздуха.
25. Способ по п.24, в котором во время фазы первичного позиционирования предотвращается подъем несущей конструкции плавучестью заполненной гелием внешней оболочки.
26. Способ по п.24 или 25, включающий переключение от фазы первичного позиционирования к фазе регулирования с использованием дистанционного управления.
| US 7341224 B1, 11.03.2008; | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 3957228 A1, 18.05.1976; | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| РЕГУЛЯТОР ВЫСОТЫ ПОЛЕТА СВОБОДНОГО АЭРОСТАТА | 1979 |
|
SU828582A1 |

