Область техники
Изобретение относится к машине для уменьшения жира и коррекции фигуры. Более конкретно изобретение относится к ультразвуковой машине для уменьшения жира и коррекции фигуры.
Уровень техники
В последние годы получила развитие ультразвуковая технология уменьшения жира. Сфокусированная ультразвуковая волна с частотой около 500 кГц в непрерывном режиме чрескожно вводится в тело пациента посредством ручного ультразвукового преобразователя. Ультразвуковая волна проходит сквозь кожу и достигает нижележащего адпипозного (жирового) слоя. Под действием создаваемых ультразвуковой волной физических эффектов, таких как тепловой эффект и высокое звуковое давление, происходит разрушение структуры жировых клеток с высвобождением их липидного содержимого. Через некоторое время свободные липиды поглощаются в результате метаболических процессов в организме. Тем самым обеспечиваются уменьшение жира и эффект коррекции фигуры. Однако скорость описанного воздействия ограничивается в связи с неудобствами и необходимостью прикладывания больших усилий при использовании ручного ультразвукового преобразователя. При этом его облучающая головка неудобна в сборке/разборке.
Раскрытие изобретения
Задача, на решение которой направлено изобретение, заключается в создании ультразвуковой машины для уменьшения жира и коррекции фигуры, которая была бы легкой и удобной в управлении, сокращала трудозатраты оператора, облегчала сборку/разборку облучающей головки и обеспечивала свободный подъем и опускание механической руки с достижением за счет этого высокой производительности. Ультразвуковая машина для уменьшения жира и коррекции фигуры согласно изобретению использует ультразвуковые частоты в диапазоне 1-3 МГц, работая в режиме испускания высокоинтенсивного ультразвукового излучения в виде импульсов с малой шириной и низким коэффициентом заполнения.
Далее будет описана ультразвуковая машина для уменьшения жира и коррекции фигуры согласно изобретению.
Ультразвуковая машина для уменьшения жира и коррекции фигуры содержит: облучающую головку, блок, несущий источник излучения, механическую руку, верхнюю раму стола пациента, корпус подъемника, основание стола пациента, тачскрин, кнопку и управляющие контуры. При этом на тачскрин выводится меню для выбора оператором выполняемой функции, а кнопка является переключателем режимов подъема/опускания корпуса подъемника. Облучающая головка закреплена в блоке, несущем источник излучения, причем головка и блок присоединены в виде единого узла к механической руке. Механическая рука жестко прикреплена к подъемнику, корпус которого жестко закреплен на основании стола пациента.
Основная часть облучающей головки сконфигурирована как самофокусирующийся сферический ультразвуковой преобразователь. Внутри облучающей головки установлены контейнер со средой, в которой распространяется ультразвук, и система водяного охлаждения по замкнутому циклу. Наружная часть облучающей головки содержит рукоятку для ее захватывания и адаптер. Рукоятка облучающей головки может захватываться как рукой, так и соответствующим органом машины при осуществлении ручного или автоматического режима облучения.
Механическая рука содержит рукоятки, держатель облучающей головки, стержни, образующие шарнирный параллелограмм, фиксатор, оси поворота, воздушные пружины и соединитель. Рукоятки, каждая из которых выполнена в форме стержня, расположены с обеих сторон держателя облучающей головки и связаны с ним для обеспечения ее перемещения. Держатель облучающей головки выполнен, как соединитель, связывающий механическую руку и блок, несущий источник излучения. Одной своей стороной держатель облучающей головки жестко прикреплен к соединительным стержням, образующим шарнирный параллелограмм, а другой своей стороной - к блоку, несущему источник излучения. Имеются две группы соединительных стержней, каждая из которых образует шарнирный параллелограмм и которые соединены одна с другой через трапецеидальный соединитель. Каждый из стержней одной из групп присоединен одним концом к трапецеидальному соединителю через соответствующую ось поворота и жестко прикреплен другим своим концом к держателю. Каждый стержень другой группы жестко прикреплен одним концом к трапецеидальному соединителю и подвижно присоединен другим своим концом к активному треугольному соединителю через соответствующую ось поворота. Соединительные стержни выполнены с возможностью свободного поворота вокруг осей поворота.
Имеются две воздушных пружины, одна из которых, связанная одним концом через ось поворота с трапецеидальным соединителем, а другим своим концом - с фиксатором и жестко присоединенная к держателю, связана также посредством металлической проволоки с указанными рукоятками. Другая воздушная пружина связана одним концом с фиксатором и жестко присоединена к трапецеидальному соединителю, а своим другим концом связана через ось поворота с треугольным соединителем. Соответственно, вращение рукояток может приводить к повороту механической руки вокруг оси поворота. Рукоятки заставляют фиксатор нажать на тормоз воздушной пружины и перевести ее из зафиксированного в свободное состояние. Посредством этих комбинированных движений механическая рука приводится в положение, желательное для осуществления облучения. При освобождении рукояток воздушная пружина может быть заблокирована в своем текущем положении. Держатель служит для закрепления облучающей головки. Поскольку механическая рука выполнена на основе шарнирного параллелограмма, а ее опорная платформа закреплена на корпусе подъемника горизонтально, облучающая головка всегда находится в вертикальном положении.
Стол пациента содержит основание и верхнюю раму, образованную трубками, соединенными посредством сварки. Имеется узел направляющих, который содержит две группы направляющих скольжения в виде стержней, взаимодействующих с ползунами, и приводные механизмы для обеспечения перемещения верхней рамы стола пациента в продольном и поперечном направлениях. Каждая группа направляющих/ползунов содержит пару взаимно параллельных направляющих, причем пары направляющих взаимно смещены по вертикали и ориентированы во взаимно ортогональных направлениях. Основание стола пациента выполнено как несущая конструкция, образованная трубками, соединенными посредством сварки. Управляющие контуры, обеспечивающие управление ультразвуковой машиной, размещены между верхней рамой и основанием стола пациента. Узел направляющих может приводиться в движение посредством приводных механизмов, так что верхняя рама стола пациента может независимо перемещаться в продольном и поперечном направлениях. Каждый из приводных механизмов выполнен на основе электродвигателя.
На корпусе подъемника установлены электродвигатель, направляющая, средство блокировки и опорная платформа механической руки. Направляющая выполнена в форме штанги с очень гладкой поверхностью. В средстве блокировки выполнено центральное отверстие для проведения через него направляющей, а опорная платформа представляет собой горизонтальную плиту. Направляющая и средство блокировки жестко соединены между собой в единый узел. Корпус подъемника жестко связан со средством блокировки и жестко прикреплен к несущей конструкции основания стола пациента через направляющую и средство блокировки. Опорная платформа механической руки жестко прикреплена к треугольному соединителю. Внутри корпуса подъемника установлен шток подъемника, который может перемещаться вверх и вниз с помощью электродвигателя.
В состав управляющих контуров входят управляющий контур для облучающей головки, управляющий контур для рамы стола пациента и управляющий контур для тачскрина.
Управляющий контур для облучающей головки содержит следующие модули:
модуль генерирования сигнала, содержащий микросхему AD9834 и ее периферийную схему и формирующий высокочастотный синусоидальный сигнал при вводе данных с управляющего терминала модуля генерирования сигнала;
модуль преобразования сигнала, содержащий микросхему МАХ913 и ее периферийную схему и способный преобразовывать указанный синусоидальный сигнал в высокочастотный цифровой сигнал;
модуль ослабления помех в последующих каскадах, содержащий микросхему 74НС04 и ее периферийную схему и способный уменьшить помехи в последующих каскадах (с использованием средств инверсии полярности) для следующих сигналов: высокочастотный цифровой сигнал, PWM сигнал (сигнал с широтно-импульсной модуляцией) и высокочастотные сигналы 1Q и 1Q#;
модуль управления сигналами, содержащий микросхему SN74HC74 и ее периферийную схему и способный обеспечить преобразование высокочастотного цифрового сигнала в высокочастотный цифровой сигнал, имеющий тот же коэффициент заполнения, что и PWM сигнал; при этом PWM сигнал, помехи которого в последующих каскадах были уменьшены использованием инвертирующей функции модуля ослабления помех, подается в модуль управления сигналами, чтобы управлять шириной двух коротких импульсов и тем самым регулировать коэффициент заполнения для высокочастотных сигналов 1Q и 1Q#;
модуль задержки сигналов, содержащий микросхему DS1013 и ее периферийную схему и способный обеспечить задержку и выдачу высокочастотных сигналов 1Q и 1Q#, помехи которых в последующих каскадах были дважды уменьшены модулем ослабления помех с получением двух высокочастотных сигналов, взаимно смещенных по фазе на половину периода;
модуль цифровой обработки сигналов, содержащий микросхему 74НС08 и ее периферийную схему и способный выполнять логическую операцию "И", с формированием четырех сигналов, по отношению к следующим сигналам: (1) двум высокочастотным сигналам, взаимно смещенным по фазе на половину периода, (2) положительному сигналу от источника питания, (3) PWM сигналам с выхода модуля управления сигналами и высокочастотным цифровым сигналам с таким же коэффициентом заполнения, что и у PWM сигналов,
модуль усиления и передачи сигналов, содержащий микросхему IXDD414 и ее периферийную схему и способный обеспечить усиление четырех сигналов и подачу усиленных сигналов в блок передачи ультразвуковой энергии.
Ультразвуковая машина для уменьшения жира и коррекции фигуры согласно изобретению обладает рядом преимуществ.
Благодаря введению блока, несущего источник излучения, облучающая головка ультразвуковой машины может подводиться к различным зонам тела пациента, что делает работу оператора легкой и удобной. При этом облучающая головка легко собирается/разбирается.
Благодаря наличию подъемного механизма, установленного в корпусе подъемника, механическая рука может легко подниматься и опускаться с помощью приводного механизма на основе электродвигателя.
Стол пациента в ультразвуковой машине по изобретению может независимо перемещаться в продольном и поперечном направлениях, что способствует повышению производительности.
Управляющий контур для облучающей головки ультразвуковой машины обеспечивает возможность повышения частоты ультразвукового излучения до 1-3 МГц, что по сравнению с частотой 500 кГц существенно уменьшит воздействие на глубоколежащие ткани тела. Другими словами, ультразвуковое излучение на частотах 1-3 МГц в случаях облучения с целью уменьшения жира является намного более безопасным.
Управляющий контур для облучающей головки способен обеспечить высокую интенсивность ультразвука. При этом режим испускания ультразвукового излучения соответствует коротким импульсам при низком коэффициенте заполнения. Высокое звуковое давление, оказываемое высокоинтенсивным излучением, усиливает эффект разрушения структуры жировых клеток. Режим работы с короткими импульсами и низким коэффициентом заполнения уменьшает нагрев ткани, вызываемый ультразвуковой энергией, и усиливает селективность разрушения клеток под действием ультразвуковой энергии. Следовательно, данный режим является полезным для снижения побочных эффектов и повышения эффективности воздействия.
Краткое описание чертежей
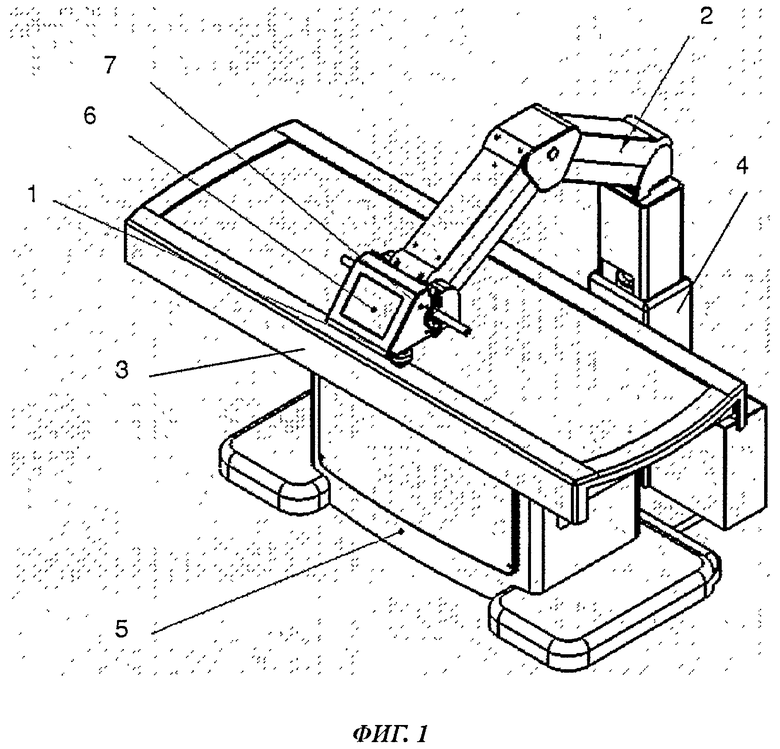
На фиг.1 представлено схематичное изображение общего вида ультразвуковой машины для уменьшения жира и коррекции фигуры согласно изобретению.
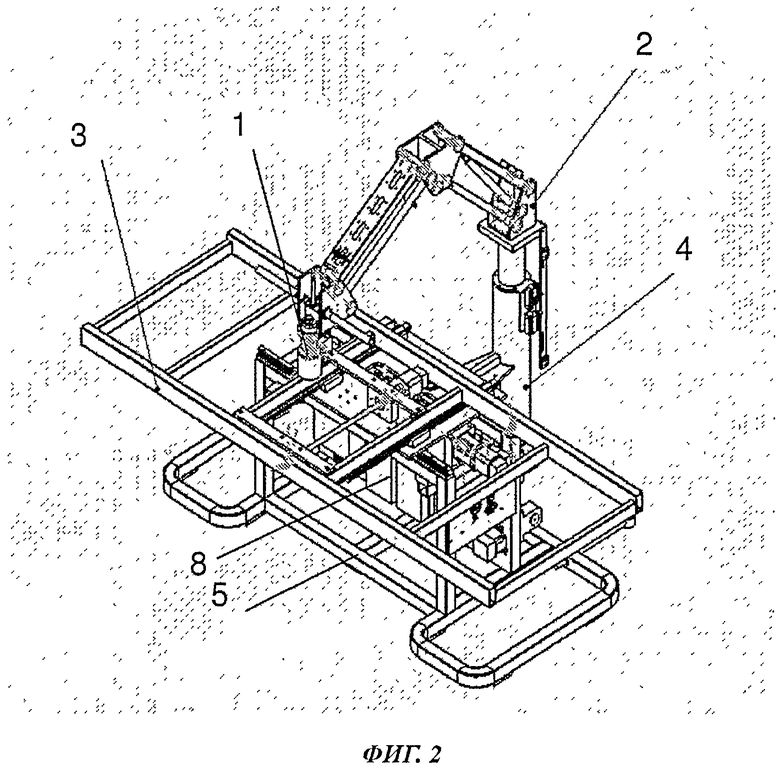
На фиг.2 схематично иллюстрируется конструктивное выполнение ультразвуковой машины согласно изобретению.
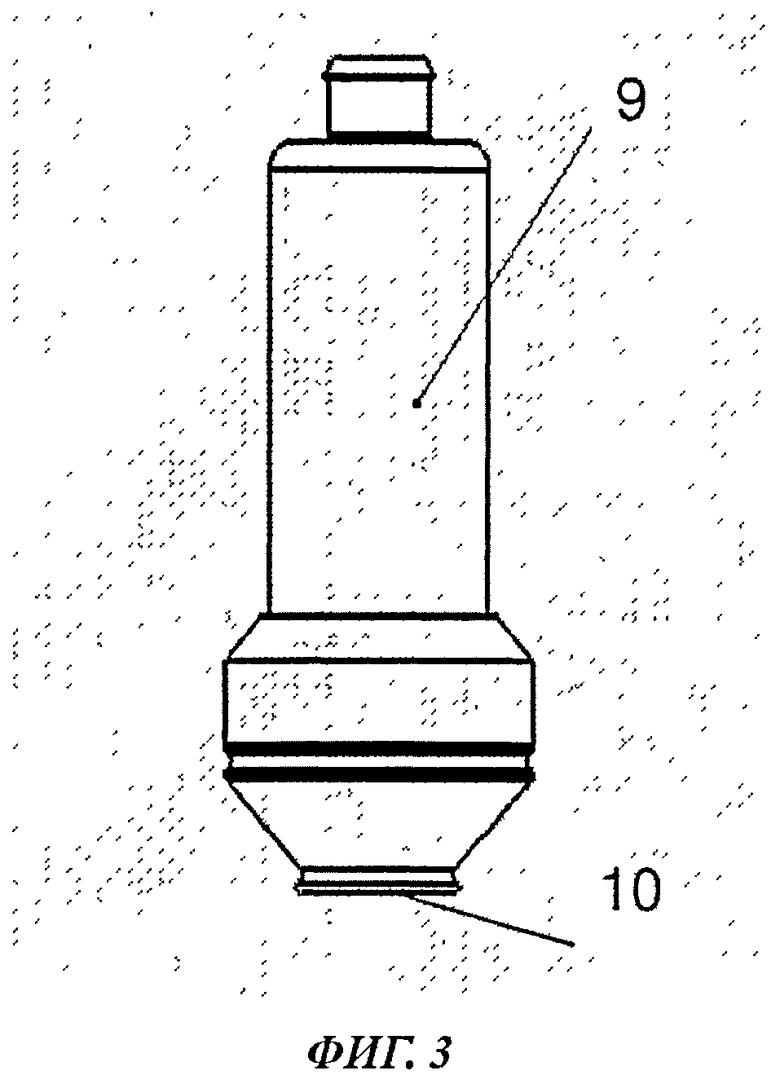
На фиг.3 схематично иллюстрируется внешний вид облучающей головки ультразвуковой машины согласно изобретению.
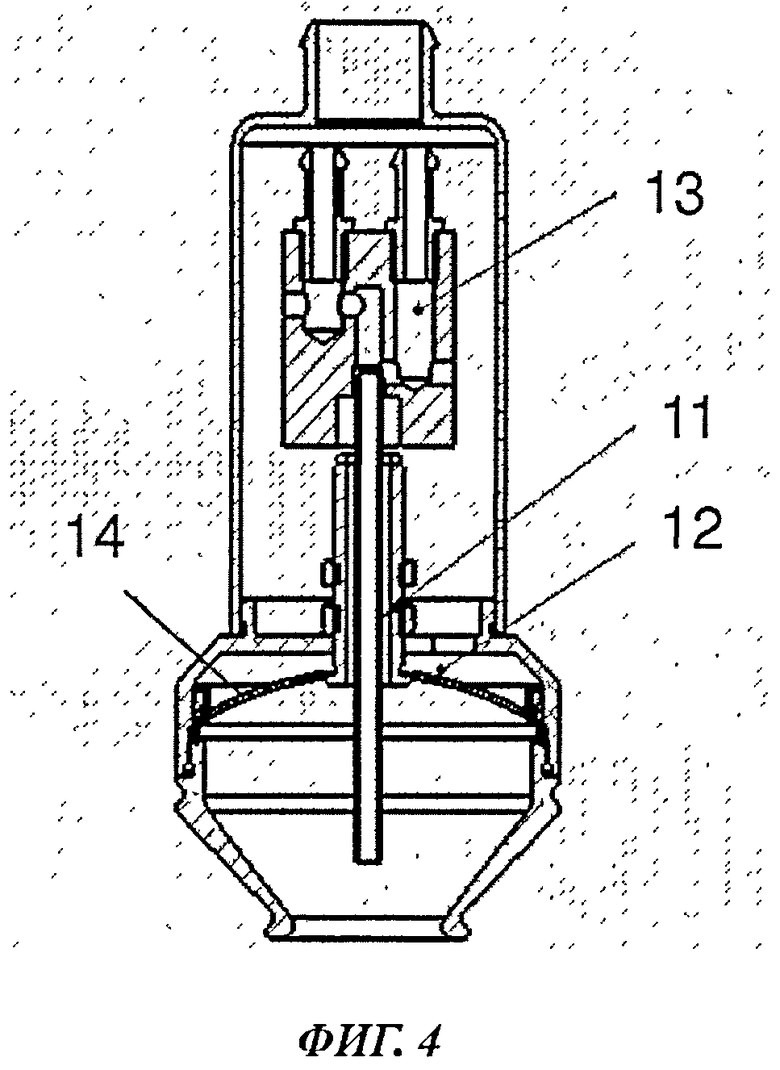
На фиг.4 облучающая головка по фиг.3 представлена в продольном разрезе.
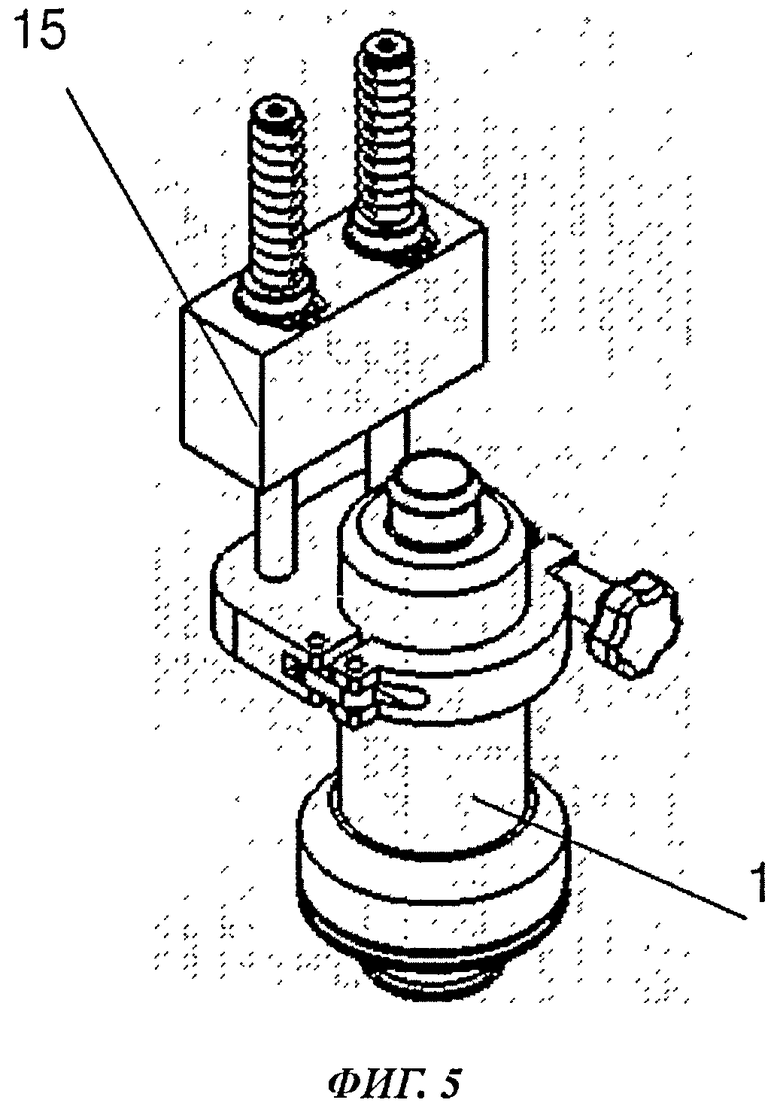
На фиг.5 схематично представлена облучающая головка в сборе с блоком, снабженным установленным в нем источником излучения.
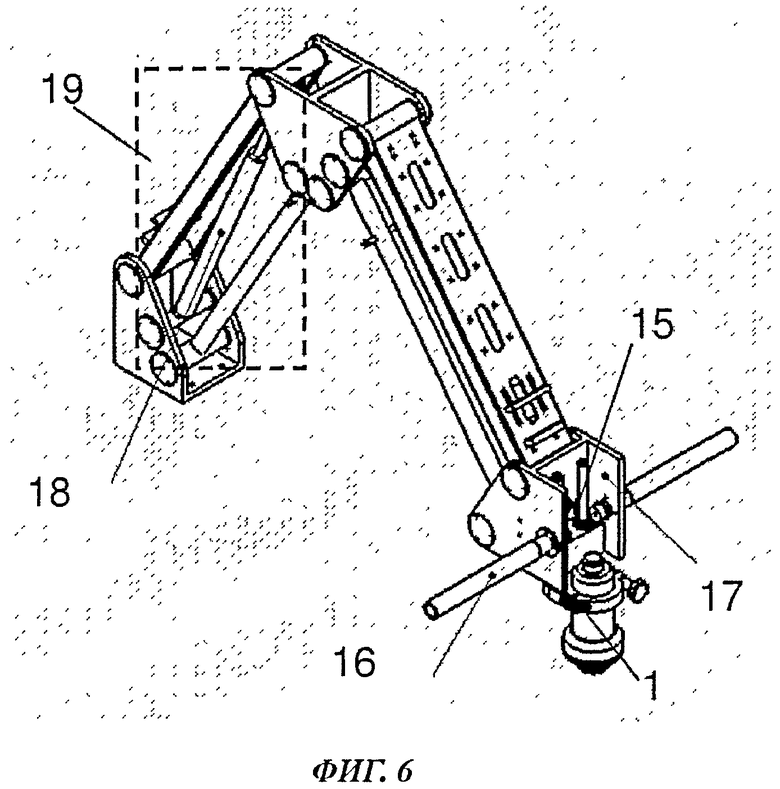
На фиг.6 схематично показан узел, образованный прикреплением к механической руке облучающей головки, закрепленной в блоке, несущем источник излучения.
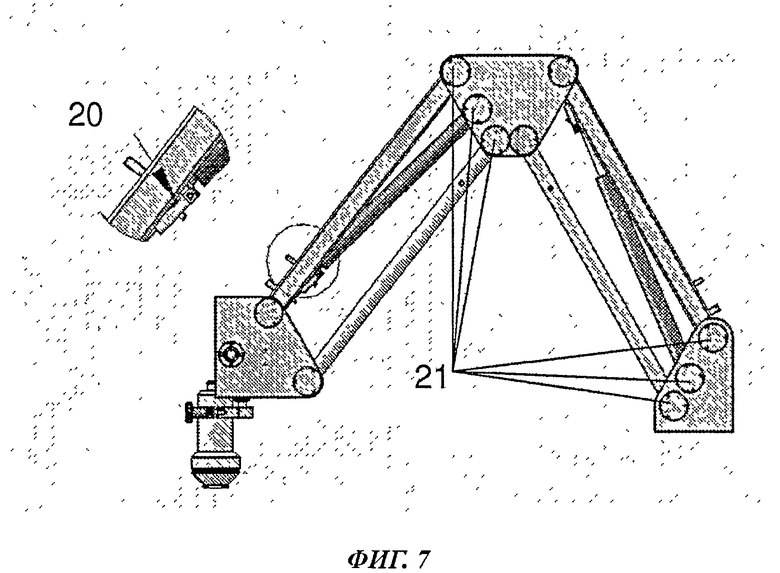
На фиг.7 схематично иллюстрируется взаимное положение частей механической руки в ультразвуковой машине согласно изобретению.
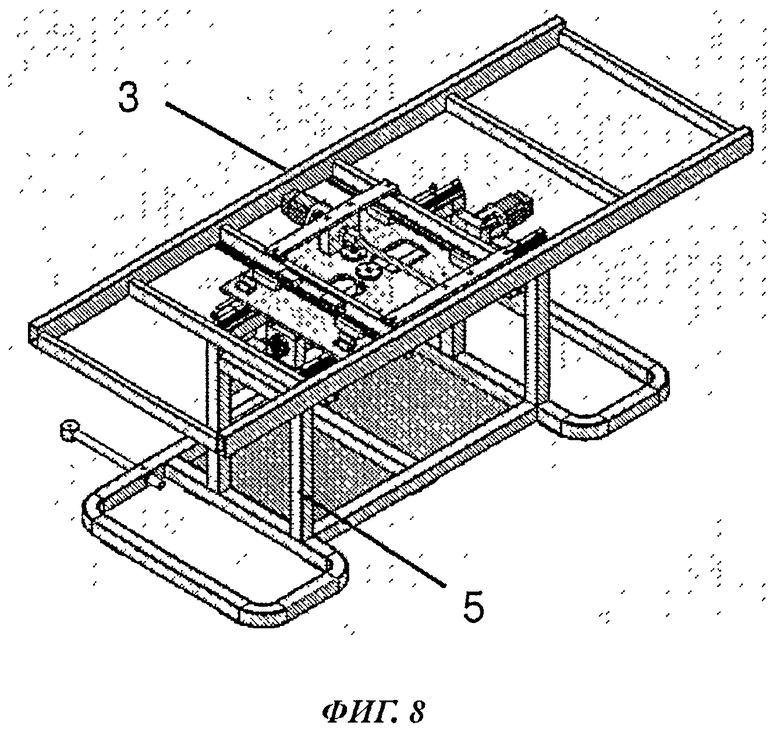
На фиг.8 схематично иллюстрируется конструктивное выполнение стола пациента в ультразвуковой машине согласно изобретению.
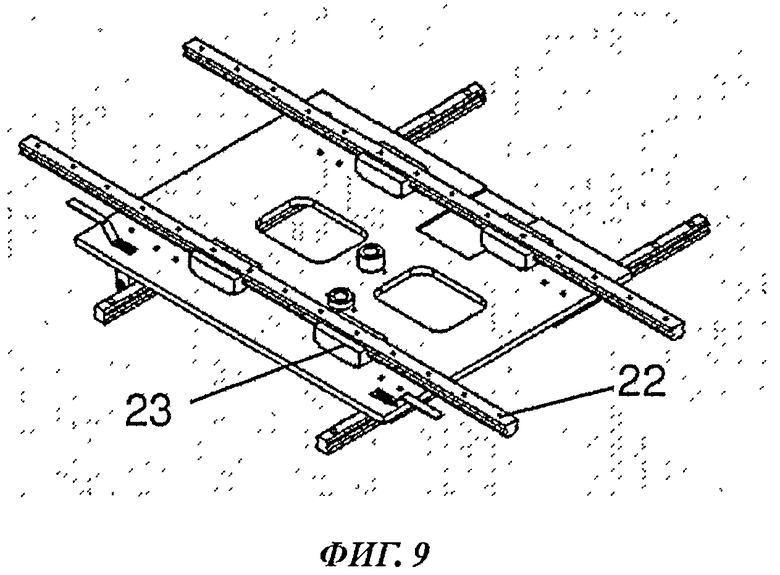
На фиг.9 схематично иллюстрируется конструкция узла направляющих ультразвуковой машины согласно изобретению.
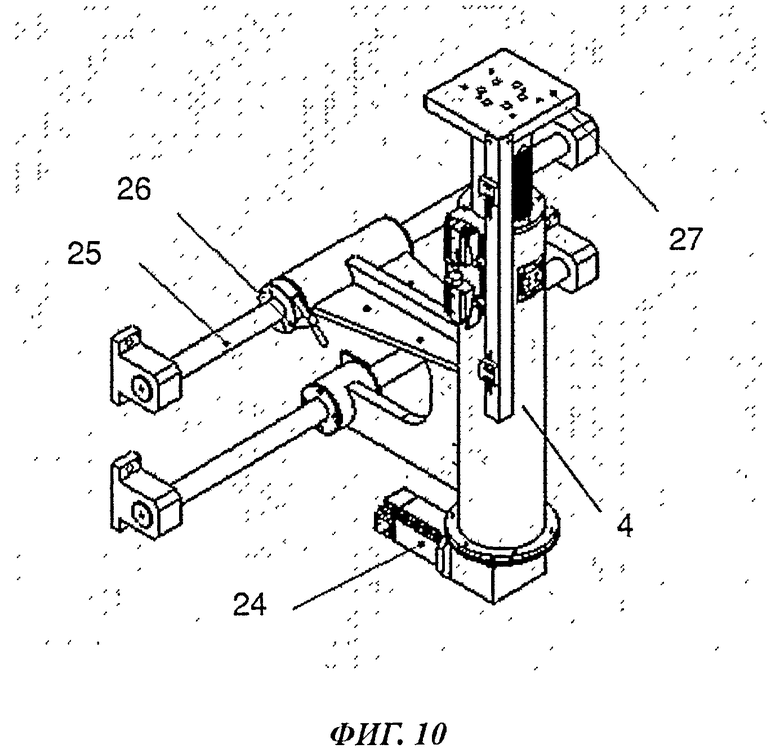
На фиг.10 схематично иллюстрируется конструкция наружной части корпуса подъемника ультразвуковой машины согласно изобретению.
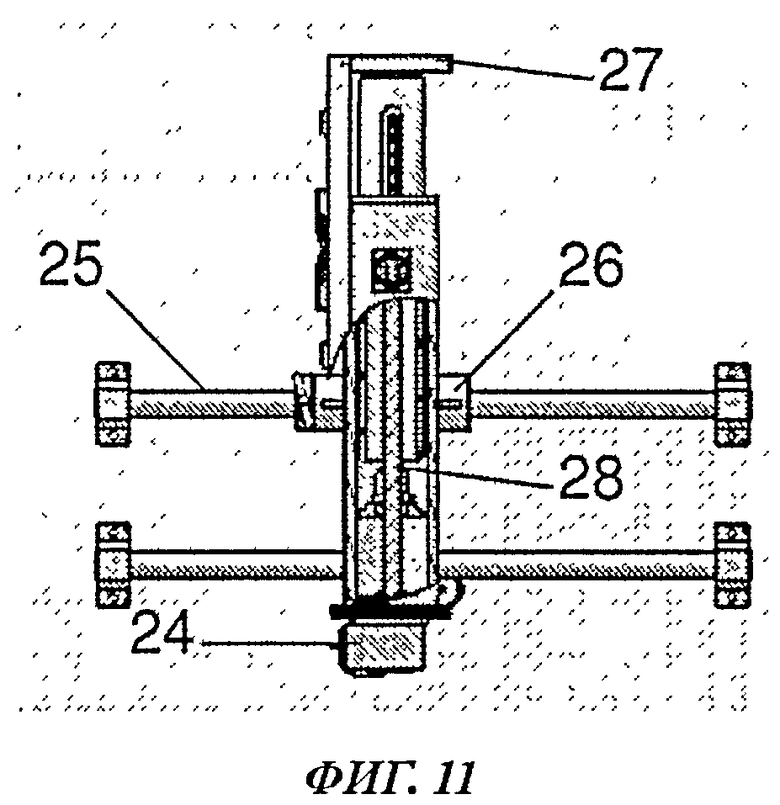
На фиг.11 часть корпуса подъемника ультразвуковой машины согласно изобретению показана в продольном разрезе.
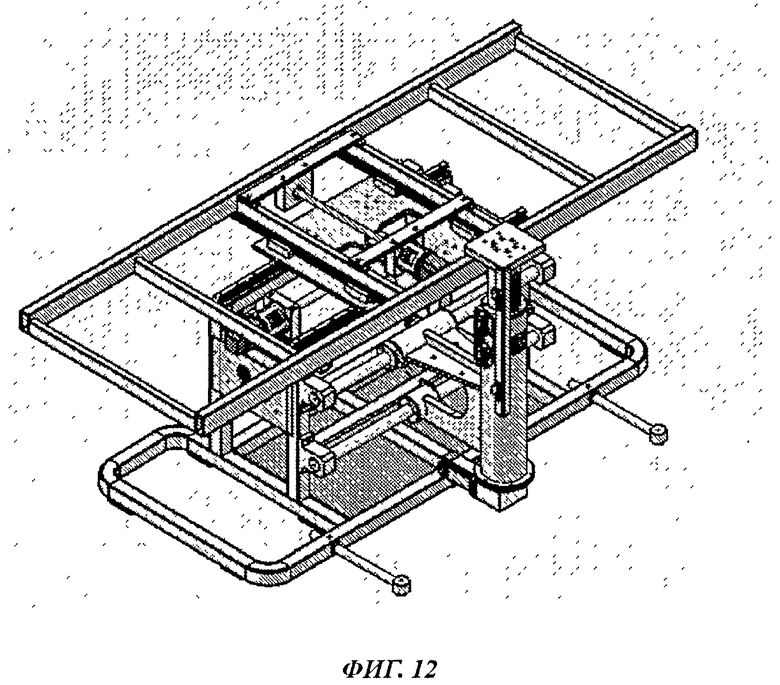
На фиг.12 схематично иллюстрируется жесткое соединение между корпусом подъемника и несущей конструкцией основания стола пациента в ультразвуковой машине согласно изобретению.
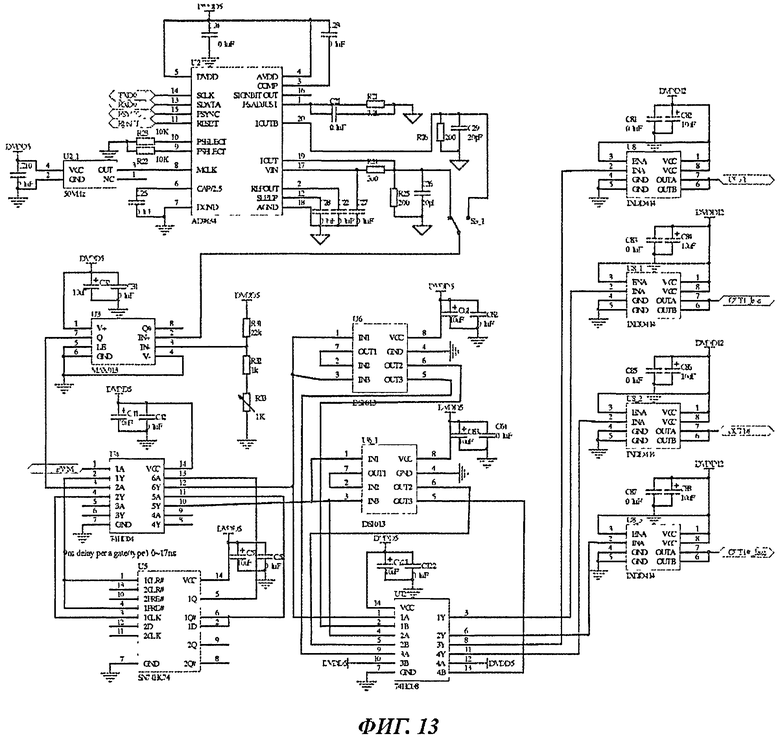
На фиг.13 представлена электрическая схема управляющего контура облучающей головки ультразвуковой машины согласно изобретению.
На чертежах использованы следующие цифровые обозначения:
1 - облучающая головка;
2 - механическая рука;
3 - верхняя рама стола пациента;
4 - корпус подъемника;
5 - основание стола пациента;
6 - тачскрин;
7 - кнопка;
8 - управляющий контур;
9 - рукоятка облучающей головки;
10 - адаптер;
11 - самофокусирующийся сферический ультразвуковой преобразователь;
12 - контейнер со средой, в которой распространяется ультразвук;
13 - система водяного охлаждения по замкнутому циклу;
14 - фокусирующая керамическая пластина;
15 - блок, несущий источник излучения;
16 - рукоятки;
17 - держатель облучающей головки;
18 - воздушная пружина;
19 - соединительные стержни;
20 - фиксатор;
21 - оси поворота;
22 - направляющая;
23 - ползун;
24 - электродвигатель;
25 - направляющая;
26 - средство блокировки;
27 - опорная платформа механической руки;
28 - шток подъемника.
Осуществление изобретения
Как показано на фиг.1 и 2, ультразвуковая машина для уменьшения жира и коррекции фигуры согласно изобретению содержит облучающую головку 1, механическую руку 2, верхнюю раму 3 стола пациента, корпус 4 подъемника, основание 5 стола пациента, тачскрин 6, кнопку 7, управляющий контур 8 и блок 15, несущий источник излучения. На тачскрин 6 выводится меню, с помощью которого пользователь производит свой выбор. Кнопка 7 служит переключателем режимов подъема/опускания корпуса 4 подъемника. Облучающая головка 1 жестко закреплена в блоке 15, несущем источник излучения, и через этот блок жестко присоединена к механической руке 2 (см. фиг.5 и 6). Механическая рука 2 жестко присоединена к подъемнику, корпус 4 которого закреплен на основании 5 стола пациента.
Как показано на фиг.3 и 4, основная часть облучающей головки 1 сконфигурирована как самофокусирующийся сферический ультразвуковой преобразователь 11. Ультразвуковая энергия концентрируется в фокусе с помощью фокусирующей керамической пластины 14. Внутри облучающей головки 1 имеются также контейнер 12 со средой, в которой распространяется ультразвук, и система 13 водяного охлаждения по замкнутому циклу. На наружной части облучающей головки 1 сформированы рукоятка 9 для захвата облучающей головки и адаптер 10. Рукоятка 9 может захватываться как рукой, так и соответствующим органом машины при осуществлении ручного или автоматического режима работы облучающей головки 1.
Как показано на фиг.5 и 6, облучающая головка закреплена в блоке 15, несущем источник излучения, а образованный ими узел закреплен в держателе 17 в составе механической руки 2 для удерживания облучающей головки.
Как показано на фиг.6 и 7, механическая рука 2 содержит рукоятки 16, держатель 17 облучающей головки, соединительные стержни 19, образующие шарнирный параллелограмм, фиксатор 20, оси 21 поворота и воздушные пружины 18. Рукоятки 16, каждая из которых выполнена в форме стержня, расположены с обеих сторон держателя 17 облучающей головки и связаны с ним для обеспечения ее перемещения. Держатель 17 облучающей головки является соединителем, связывающим механическую руку 2 и блок 15, несущий источник излучения. Одной своей стороной держатель 17 жестко прикреплен к соединительным стержням 19, образующим шарнирный параллелограмм, а другой своей стороной - к блоку 15, несущему источник излучения. Имеются две группы соединительных стержней 19, каждая из которых образует шарнирный параллелограмм и которые соединены одна с другой через трапецеидальный соединитель. Каждый из стержней 19 одной из этих групп присоединен одним концом к трапецеидальному соединителю через соответствующую ось 21 поворота и жестко прикреплен другим своим концом к держателю 17. Каждый стержень 19 другой группы жестко прикреплен одним концом к трапецеидальному соединителю и подвижно присоединен другим своим концом к активному треугольному соединителю через соответствующую ось 21 поворота. Соединительные стержни 19, образующие шарнирный параллелограмм, могут свободно поворачиваться вокруг осей 21 поворота. Имеются также две воздушные пружины 18. Одна из воздушных пружин 18 связана одним концом через ось 21 поворота с трапецеидальным соединителем, а другим своим концом - с фиксатором 20 и жестко присоединена к держателю 17. Эта воздушная пружина 18 связана также посредством металлической проволоки с рукоятками 16. Другая воздушная пружина 18 связана одним концом с фиксатором 20 и жестко присоединена к трапецеидальному соединителю. Своим другим концом она связана через ось 21 поворота с треугольным соединителем.
При таком выполнении вращение рукояток 16 может приводить к повороту механической руки 2 вокруг оси 21 поворота. Рукоятки 16 заставляют фиксатор 20 нажать на тормоз воздушной пружины 18 и перевести ее из зафиксированного в свободное состояние. Посредством этих комбинированных движений механическая рука 2 приводится в положение, желательное для осуществления облучения. При освобождении рукояток 16 воздушная пружина 18 может быть заблокирована в своем текущем положении. Держатель 17 служит для закрепления облучающей головки. Поскольку механическая рука 2 выполнена на основе шарнирного параллелограмма, а ее опорная платформа 27 закреплена на корпусе 4 подъемника горизонтально, облучающая головка 1 всегда находится в вертикальном положении.
Как показано на фиг.8 и 9, стол пациента содержит верхнюю раму 3 и основание 5. Верхняя рама 3 образована трубками, соединенными посредством сварки. Имеется также узел направляющих с двумя группами направляющих 22 скольжения в виде стержней, взаимодействующих с ползунами 23. Данный узел содержит также приводные механизмы для обеспечения перемещения верхней рамы 3 стола пациента в продольном и поперечном направлениях. Каждая группа направляющих 22/ползунов 23 содержит пару взаимно параллельных направляющих, причем эти две пары направляющих взаимно смещены по вертикали и ориентированы во взаимно ортогональных направлениях. Основание 5 стола пациента является несущей конструкцией, поддерживающей стол пациента и образованной трубками, соединенными посредством сварки. Управляющие контуры 8, обеспечивающие управление ультразвуковой машиной для уменьшения жира и коррекции фигуры согласно изобретению, размещены между верхней рамой 3 стола пациента и основанием 5. Узел направляющих 22/ползунов 23 может перемещаться посредством приводных механизмов, что обеспечивает независимые перемещения верхней рамы 3 стола пациента в продольном и поперечном направлениях. Каждый из указанных приводных механизмов выполнен на основе электродвигателя.
Как показано на фиг.10, на корпусе 4 подъемника установлены электродвигатель 24, направляющая 25, средство 26 блокировки и опорная платформа 27 механической руки. Направляющая 25 выполнена в форме штанги с очень гладкой поверхностью. В средстве 26 блокировки имеется центральное отверстие для проведения через него направляющей 25. Опорная платформа 27 механической руки представляет собой горизонтальную плиту. Направляющая 25 и средство 26 блокировки жестко соединены между собой, образуя единый узел. Корпус 4 подъемника жестко связан со средством 26 блокировки и, как показано на фиг.12, жестко прикреплен к несущей конструкции основания 5 стола пациента через направляющую 25 и средство 26 блокировки. Опорная платформа 27 механической руки неподвижно прикреплена к треугольному соединителю механической руки 2. Как показано на фиг.11, внутри корпуса 4 подъемника установлен шток 28 подъемника, который жестко прикреплен к опорной платформе механической руки. При этом шток подъемника может перемещаться вверх и вниз с помощью электродвигателя 24.
В состав управляющих контуров 8 входят управляющий контур для облучающей головки, управляющий контур для рамы стола пациента и управляющий контур для тачскрина (см. фиг.13).
Управляющий контур для облучающей головки содержит следующие модули:
модуль генерирования сигнала, содержащий микросхему AD9834 и ее периферийную схему и формирующий высокочастотный синусоидальный сигнал при вводе данных с управляющего терминала модуля генерирования сигнала;
модуль преобразования сигнала, содержащий микросхему МАХ913 и ее периферийную схему и способный преобразовывать указанный синусоидальный сигнал в высокочастотный цифровой сигнал;
модуль ослабления помех в последующих каскадах, содержащий микросхему 74НС04 и ее периферийную схему и способный уменьшить помехи в последующих каскадах (с использованием средств инверсии полярности) для следующих сигналов: высокочастотный цифровой сигнал, PWM сигнал и высокочастотные сигналы 1Q и 1Q#;
модуль управления сигналами, содержащий микросхему SN74HC74 и ее периферийную схему и способный обеспечить преобразование высокочастотного цифрового сигнала в высокочастотный цифровой сигнал, имеющий тот же коэффициент заполнения, что и PWM сигнал; при этом PWM сигнал, помехи которого в последующих каскадах были уменьшены использованием инвертирующей функции модуля ослабления помех, подается в модуль управления сигналами, чтобы управлять шириной двух коротких импульсов и тем самым регулировать коэффициент заполнения для высокочастотных сигналов 1Q и 1Q#;
модуль задержки сигналов, содержащий микросхему DS1013 и ее периферийную схему и способный обеспечить задержку и выдачу высокочастотных сигналов 1Q и 1Q#, помехи которых в последующих каскадах были дважды уменьшены модулем ослабления помех с получением двух высокочастотных сигналов, взаимно смещенных по фазе на половину периода;
модуль цифровой обработки сигналов, содержащий микросхему 74НС08 и ее периферийную схему и способный выполнять логическую операцию "И", с формированием четырех сигналов, по отношению к следующим сигналам: (1) двум высокочастотным сигналам, взаимно смещенным по фазе на половину периода, (2) положительному сигналу от источника питания, (3) PWM сигналам с выхода модуля управления сигналами и высокочастотным цифровым сигналам с таким же коэффициентом заполнения, что и у PWM сигналов, и
модуль усиления и передачи сигналов, содержащий микросхему IXDD414 и ее периферийную схему и способный обеспечить усиление четырех сигналов и подачу усиленных сигналов в блок передачи ультразвуковой энергии.
При использовании ультразвуковой машины для уменьшения жира и коррекции фигуры согласно изобретению выполняемые операции могут выбираться с помощью меню, выведенного на тачскрин 6, а управление поднятием/опусканием корпуса подъемника может осуществляться посредством кнопки 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕСТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ КАЛИБРОВКИ ЭНЕРГИИ ИМПУЛЬСА ЛАЗЕРНОГО УСТРОЙСТВА | 2011 |
|
RU2587958C1 |
| КАМЕРА ДЛЯ СОВМЕСТНЫХ КЛИМАТИЧЕСКИХ И ЭЛЕКТРОМАГНИТНЫХ ВОЗДЕЙСТВИЙ НА БИОЛОГИЧЕСКИЙ ОБЪЕКТ | 2015 |
|
RU2627985C2 |
| КОМПЬЮТЕРНАЯ СИСТЕМА | 1988 |
|
RU2022494C1 |
| СПОСОБ ДЛЯ КОМПЛЕКСНОЙ ФОТОКОРРЕКЦИИ ВЕСА | 2000 |
|
RU2203112C2 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА С ПРОЦЕССОРНЫМ ЭЛЕКТРОННЫМ КЛЮЧОМ | 2016 |
|
RU2720290C2 |
| УСТРОЙСТВО ПОДДЕРЖКИ ПАЦИЕНТА ПРИ ИММОБИЛИЗАЦИИ В ПОЛОЖЕНИИ ЛЕЖА НА ЖИВОТЕ | 2013 |
|
RU2630772C2 |
| ЛАЗЕРНАЯ СИСТЕМА МЯГКОЙ СТЫКОВКИ ДЛЯ СИСТЕМЫ МЕДИЦИНСКОЙ ЛУЧЕВОЙ ТЕРАПИИ | 1999 |
|
RU2230492C2 |
| ИСКРИВЛЕННЫЙ УЛЬТРАЗВУКОВОЙ HIFU-ПРЕОБРАЗОВАТЕЛЬ С ЗАРАНЕЕ СФОРМИРОВАННЫМ СФЕРИЧЕСКИМ СЛОЕМ СОГЛАСОВАНИЯ | 2010 |
|
RU2553496C2 |
| АППАРАТУРА СПУТНИКОВОЙ СВЯЗИ И НАВИГАЦИИ ПАССАЖИРСКОГО ПОЕЗДА | 2009 |
|
RU2465726C2 |
| КАТЕТЕР, СОДЕРЖАЩИЙ ЕМКОСТНЫЕ МИКРОМАШИННЫЕ УЛЬТРАЗВУКОВЫЕ ПРЕОБРАЗОВАТЕЛИ, С РЕГУЛИРУЕМЫМ ФОКУСОМ | 2011 |
|
RU2594429C2 |
Изобретение относится к ультразвуковой машине для уменьшения жира и коррекции фигуры. Машина содержит облучающую головку, блок, несущий источник излучения, механическую руку, стол пациента, корпус подъемника, тачскрин и управляющие контуры. На тачскрин выводится меню для выбора оператором выполняемой функции. Облучающая головка закреплена в блоке, несущем источник излучения, причем эта головка и блок присоединены в виде единого узла к механической руке, а механическая рука жестко прикреплена к подъемнику, корпус которого жестко закреплен на основании стола пациента. Стол пациента содержит основание, верхнюю раму, образованную трубками, соединенными посредством сварки, и узел направляющих, который содержит две группы направляющих скольжения в виде стержней, взаимодействующих с ползунами, и приводные механизмы для обеспечения перемещения верхней рамы стола пациента в продольном и поперечном направлениях. Каждая группа направляющих/ползунов содержит пару взаимно параллельных направляющих. Пары направляющих взаимно смещены по вертикали и ориентированы во взаимно ортогональных направлениях; основание стола пациента выполнено как несущая конструкция, образованная трубками, соединенными посредством сварки. Управляющие контуры, обеспечивающие управление ультразвуковой машиной, размещены между верхней рамой и основанием стола пациента. Каждый из приводных механизмов выполнен на основе электродвигателя. Изобретение обеспечивает легкую сборку/разборку облучающей головки, а также удобное поднимание и опускание механической руки. 4 з.п. ф-лы, 13 ил.
1. Ультразвуковая машина для уменьшения жира и коррекции фигуры, характеризующаяся тем, что содержит: облучающую головку, блок, несущий источник излучения, механическую руку, верхнюю раму стола пациента, корпус подъемника, основание стола пациента, тачскрин, кнопку и управляющие контуры; при этом на тачскрин выводится меню для выбора оператором выполняемой функции; кнопка является переключателем режимов подъема/опускания корпуса подъемника, а облучающая головка закреплена в блоке, несущем источник излучения, причем указанные головка и блок присоединены в виде единого узла к механической руке, а механическая рука жестко прикреплена к подъемнику, корпус которого закреплен на основании стола пациента; при этом стол пациента содержит основание, верхнюю раму, образованную трубками, соединенными посредством сварки, и узел направляющих, который содержит две группы направляющих скольжения в виде стержней, взаимодействующих с ползунами, и приводные механизмы для обеспечения перемещения верхней рамы стола пациента в продольном и поперечном направлениях; при этом каждая группа направляющих/ползунов содержит пару взаимно параллельных направляющих, причем пары направляющих взаимно смещены по вертикали и ориентированы во взаимно ортогональных направлениях; основание стола пациента выполнено как несущая конструкция, образованная трубками, соединенными посредством сварки; управляющие контуры, обеспечивающие управление ультразвуковой машиной, размещены между верхней рамой и основанием стола пациента; каждый из указанных приводных механизмов выполнен на основе электродвигателя.
2. Ультразвуковая машина по п.1, отличающаяся тем, что основная часть облучающей головки сконфигурирована как самофокусирующийся сферический ультразвуковой преобразователь, внутри облучающей головки установлены контейнер со средой, в которой распространяется ультразвук, и система водяного охлаждения по замкнутому циклу, а наружная часть облучающей головки содержит рукоятку для захватывания указанной головки и адаптер.
3. Ультразвуковая машина по п.1, отличающаяся тем, что
механическая рука содержит рукоятки, держатель облучающей головки, соединительные стержни, образующие шарнирный параллелограмм, фиксатор, оси поворота и воздушные пружины, при этом
рукоятки, каждая из которых выполнена в форме стержня, расположены с обеих сторон держателя облучающей головки и связаны с ним для обеспечения ее перемещения;
держатель облучающей головки, выполненный как соединитель, связывающий механическую руку и блок, несущий источник излучения, одной своей стороной жестко прикреплен к соединительным стержням, образующим шарнирный параллелограмм, а другой своей стороной - к блоку, несущему источник излучения;
имеются две группы соединительных стержней, каждая из которых образует шарнирный параллелограмм и которые соединены одна с другой через трапецеидальный соединитель, причем каждый из стержней одной из групп присоединен одним концом к трапецеидальному соединителю через соответствующую ось поворота и жестко прикреплен другим своим концом к держателю, а каждый стержень другой группы жестко прикреплен одним концом к трапецеидальному соединителю и подвижно присоединен другим своим концом к активному треугольному соединителю через соответствующую ось поворота, и соединительные стержни выполнены с возможностью свободного поворота вокруг осей поворота;
имеются две воздушные пружины, причем одна из воздушных пружин, связанная одним концом через ось поворота с трапецеидальным соединителем, а другим своим концом - с фиксатором и жестко присоединенная к держателю, связана также посредством металлической проволоки с указанными рукоятками, а другая воздушная пружина связана одним концом с фиксатором и жестко присоединена к трапецеидальному соединителю, а своим другим концом связана через ось поворота с треугольным соединителем.
4. Ультразвуковая машина по п.1, отличающаяся тем, что
на корпусе подъемника установлены электродвигатель, направляющая, средство блокировки и опорная платформа механической руки; при этом
направляющая выполнена в форме штанги с очень гладкой поверхностью;
в средстве блокировки выполнено центральное отверстие для проведения через него направляющей;
опорная платформа представляет собой горизонтальную плиту;
направляющая и средство блокировки жестко соединены между собой в единый
узел;
корпус подъемника жестко связан со средством блокировки и жестко прикреплен к несущей конструкции основания стола пациента через направляющую и средство блокировки;
внутри корпуса подъемника установлен шток подъемника.
5. Ультразвуковая машина по п.1, отличающаяся тем, что
управляющий контур для облучающей головки содержит следующие модули:
модуль генерирования сигнала, содержащий микросхему AD9834 и ее периферийную схему и формирующий высокочастотный синусоидальный сигнал при вводе данных с управляющего терминала модуля генерирования сигнала;
модуль преобразования сигнала, содержащий микросхему МАХ913 и ее периферийную схему и способный преобразовывать указанный синусоидальный сигнал в высокочастотный цифровой сигнал;
модуль ослабления помех в последующих каскадах, содержащий микросхему 74НС04 и ее периферийную схему и способный уменьшить, с использованием средств инверсии полярности, помехи в последующих каскадах для следующих сигналов: высокочастотный цифровой сигнал, PWM сигнал и высокочастотные сигналы 1Q и 1Q#;
модуль управления сигналами, содержащий микросхему SN74HC74 и ее периферийную схему и способный обеспечить преобразование высокочастотного цифрового сигнала в высокочастотный цифровой сигнал, имеющий тот же коэффициент заполнения, что и PWM сигнал; при этом PWM сигнал, помехи которого в последующих каскадах были уменьшены использованием инвертирующей функции модуля ослабления помех, подается в модуль управления сигналами, чтобы управлять шириной двух коротких импульсов и тем самым регулировать коэффициент заполнения для высокочастотных сигналов 1Q и 1Q#;
модуль задержки сигналов, содержащий микросхему DS1013 и ее периферийную схему и способный обеспечить задержку и выдачу высокочастотных сигналов 1Q и 1Q#, помехи которых в последующих каскадах были дважды уменьшены модулем ослабления помех с получением двух высокочастотных сигналов, взаимно смещенных по фазе на половину периода;
модуль цифровой обработки сигналов, содержащий микросхему 74НС08 и ее периферийную схему и способный выполнять логическую операцию ′′И′′, с формированием четырех сигналов, по отношению к следующим сигналам: (1) двум высокочастотным сигналам, взаимно смещенным по фазе на половину периода, (2) положительному сигналу от источника питания, (3) PWM сигналам с выхода модуля управления сигналами и высокочастотным цифровым сигналам с таким же коэффициентом заполнения, что и у PWM сигналов, и
модуль усиления и передачи сигналов, содержащий микросхему IXDD414 и ее периферийную схему и способный обеспечить усиление четырех сигналов и подачу усиленных сигналов в блок передачи ультразвуковой энергии.
| US 2005261584 A1, 24.11.2005 | |||
| US 2005107702 A1, 19.05.2005 | |||
| US 6052611 A, 18.04.2000 | |||
| US 2005154431 A1, 14.07.2005 | |||
| US 2007239079 A1, 11.10.2007 | |||
| СПОСОБ УЛЬТРАЗВУКОВОЙ КОМБИНИРОВАННОЙ ЛИПОСАКЦИИ | 2006 |
|
RU2302270C1 |

