Изобретение относится к области обработки цифровых данных с помощью электрических устройств, а именно к конструкциям указательных устройств, перемещаемых пользователем ("мышам", трекболам, "перьям", джойстикам), и принадлежностей для них, может быть использовано в производстве периферийных устройств для персональных компьютеров.
Известны указательные устройства "мышь", у которых имеется корпус, несущий на себе и вмещающий в себя все остальные конструктивные элементы "мыши" (Вильховченко С. Современный компьютер: устройство, выбор, модернизация. - СПб.: "Питер", 2000. - с.334-342. Мюллер С. Модернизация и ремонт ПК, 17-е издание. - М.: "Вильяме", 2008. - с.1068-1077). При этом корпус не содержит каких-либо конструктивных элементов (движителей, приводов и т.д.), с помощью которых "мышь" могла бы самостоятельно двигаться относительно опорной поверхности, человека-пользователя, компьютера, к которому подключена, и т.п. вперед-назад, влево-вправо, поворачиваться и т.д.
Недостатком этих указательных устройств является то, что во время упорной, сосредоточенной работы за персональным компьютером (например, при наборе текстов в программе - текстовом редакторе, или редактировании изображений в программе - графическом редакторе, или даже при интенсивной игре в компьютерную "стрелялку" или "стратегию") все внимание человека-пользователя (а значит, и его взгляд) буквально приковано к монитору компьютера, за которым он трудится, а точнее к программному обеспечению, с которым он в этот момент работает. Сосредоточенность на программном обеспечении, как известно, помогает делать меньше ошибок во время работы, а вот необходимость в периодическом переключении внимания (и, соответственно, переводе взгляда) на что-то постороннее (вроде "мыши", чтобы захватить ее рукой и передвинуть с ее помощью "мышиный" курсор по экрану) здорово раздражает и к тому же приводит к лишнему расходованию ценного времени, а также быстрому физическому утомлению. Если бы компьютерная "мышь" могла сама каким-либо образом пододвигаться под опускающуюся на нее кисть руки пользователя, обеспечивая при этом моментальный и правильный захват, то работать (да и играть) такой "мышью" было бы продуктивнее и удобнее, а пользователь (в особенности начинающий) при этом не раздражался бы из-за неловких налетов руки на ее корпус (из-за чего сбивается "мышиный" курсор), ошибочных нажатий не на ту кнопку "мыши" и прочих собственных неаккуратных действий.
В качестве прототипа выбрано указательное устройство "мышь" швейцарской фирмы Logitech - (модель 2011 года) Wireless Mouse M515 (см. сайт фирмы Logitech и стр. http://www.logitech.com/ru-ru/press/press-releases/8016), которое содержит внутри своего корпуса датчик (или датчики) приближения ладони руки человека-пользователя, работающего с ней. Наличие в конструкции датчика приближения руки позволяет активировать (включать) данную "мышь" тогда, когда на нее ложится пользовательская ладонь, в противном же случае (при отсутствии ладони) "мышь" переходит в "спящий" режим (отключается). Это экономит заряд установленных в "мыши" батарей (двух элементов питания типа АА). Как заверяет производитель, одного комплекта батарей этой беспроводной "мыши" должно хватать на два года нормального функционирования. Таким образом, присутствие датчика (или датчиков) приближения руки в "мыши" Logitech Wireless Mouse M515 повышает удобство эксплуатации (например, не сбивается "мышиный" курсор во время случайного скольжения корпуса), сильно удлиняет срок службы ее батарей, вообще увеличивает ресурс всех электронных элементов ее конструкции.
Недостатком этой "мыши"-прототипа является неспособность самостоятельно передвигаться относительно опорной поверхности, человека-пользователя, компьютера, к которому подключена, и т.д., в результате чего невозможно обеспечить подход (пододвижение) "мыши" под опускающуюся на нее ладонь пользователя для быстрого и удобного захвата рукой, что, в свою очередь, прилично раздражает (в особенности начинающих пользователей персональных компьютеров), приводит к быстрому физическому утомлению, а также лишнему расходованию ценного рабочего времени.
Техническим результатом предлагаемого изобретения является повышение общего удобства и производительности при эксплуатации «мыши» за счет предотвращения лишних движений и перерасхода рабочего времени в результате исключения повторяющихся рутинных действий, таких как отвлечение внимания от экрана для перевода взгляда на «мышь» и обратно, нащупывание корпуса «мыши» (особенно продолжительное в условиях затемненности, восстановление положения сбившегося «мышиного» курсора, на что (нащупывание и восстановление) каждый раз уходит приблизительно 0,5 секунды и более, отмена ошибочных нажатий на кнопки (на что также тратится время) и т.п.
Поставленная задача решается благодаря тому, что в указательном устройстве "мышь", содержащем корпус, чипсет (управляющий работой "мыши" и осуществляющий ее взаимодействие с персональным компьютером), датчик (или датчики) приближения руки и другие, обычно устанавливаемые на корпусе (или внутри него) элементы конструкции, предусматривается установка специального движителя (или движителей), позволяющего "мыши" самостоятельно двигаться относительно опорной поверхности (а значит, и человека-пользователя) вперед-назад, влево-вправо, поворачиваться относительно опорной поверхности и пр., а также установка обеспечивающего работоспособность движителя (или движителей) привода, предоставляющих тем самым "мыши" возможность точно подходить (пододвигаться) под опускающуюся на нее ладонь пользователя в те моменты, когда пользователю необходимо захватить "мышь" рукой для передвижения с ее помощью по экрану "мышиного" курсора (чтобы выполнять производимую за компьютером работу), гарантируя пользователю быстрый и правильный (а потому и удобный) ее захват. Привод движителя (или движителей) подключается к чипсету "мыши" и, запитываясь от него энергией, управляется его командами, а сам чипсет, питаясь от компьютера либо через проводной интерфейс (например, PS/2 или USB), либо от установленных в "мыши" батарей, вырабатывает команды для привода на основании данных, поставляемых датчиком (или датчиками) приближения в зависимости от положения руки пользователя относительно корпуса "мыши".
Техническая сущность и принцип действия предложенного указательного устройства "мышь" поясняются чертежом (фиг.1), на котором изображен продольный разрез "мыши" с установленными внутри ее корпуса простейшим движителем, его приводом и механизмом поворота корпуса в горизонтальной плоскости.
Предложенное указательное устройство "мышь" (фиг.1) состоит из корпуса 1, расположенной внутри него печатной платы 2 (на которой располагаются все электрические и электронные компоненты конструкции "мыши", включая и распаянный на ней чипсет 3), катушки (вместе с сердечником и обмоткой) электромагнита 4, которая прикреплена неподвижно к печатной плате 2 так, чтобы сердечник, выглядывая снизу из корпуса 1, одновременно служил задней опорой корпуса "мыши", а в верхней своей части выполнял роль оси вращения для ведомой шестерни 5, на которую сверху неподвижно крепится привод 6 пары вращающихся в вертикальной плоскости эксцентриков 7 (приводящих "мышь" в движение относительно опорной поверхности за счет центробежных сил), а также механизма поворота 8 корпуса "мыши" в горизонтальной плоскости (с ведущей шестерней 9 на выходном валу) и датчиков приближения руки 10, 11, 12 и 13 человека-пользователя, установленных спереди, по бокам и сзади корпуса 1 на его верхней стороне. Чипсет 3 "мыши", принимая данные от органов управления (кнопок, колеса прокрутки, блока отслеживания перемещения "мыши" (куда входят источник света, световод, линза, оптический датчик и др.), датчиков приближения руки и т.д.) и обрабатывая их, вырабатывает соответствующие сигналы, передает их через проводной (например, PS/2 или USB) или беспроводной (например, работающий в стандартном 2,4 - ГГц диапазоне) интерфейс 14 компьютеру, к которому подключена "мышь", и через этот же интерфейс (или же от установленных в "мыши" батарей 15) получает питание для собственного функционирования и запитки других компонентов конструкции. Электромагнит 4 запитывается от печатной платы 2, то есть, по сути, от чипсета 3, и включается и выключается в нужные моменты времени по командам от него же. Ведомая шестерня 5 с прикрепленным к ней приводом 6 приводится во вращение (в горизонтальной плоскости) ведущей шестерней 9 механизма поворота 8 корпуса "мыши", представляющего собой электродвигатель постоянного тока (или электродвигатель-редуктор), установленный на печатную плату 2 (и от нее же получающий питание) и включающийся-выключающийся (а также и реверсирующийся, например, с помощью смены полярности питания) по командам от чипсета 3, причем угол поворота шестерни 9 (а с ней и шестерни 5) определяется или встроенным в механизм поворота 8, или установленным отдельно на печатной плате 2 датчиком угла поворота 16 (могущим быть конструктивно аналогичным, например, механо-электрическим преобразователям, которые устанавливались ранее на "мышах" шарового типа). Привод 6 эксцентриков 7, представляющий собой также электродвигатель постоянного тока (или электродвигатель - редуктор), тоже запитывается от печатной платы 2 и вращает эксцентрики 7 в обе стороны (по чертежу - по часовой стрелке и против нее) по команде от чипсета 3, реверсируя свое вращение, к примеру, с помощью смены полярности питания. При этом выходной вал привода 6 лежит в одной плоскости с осевой линией электромагнита 4 (для предотвращения возникновения вредного разворачивающего момента), а сам привод 6 содержит датчик положения выходного вала, подключенный к чипсету 3, аналогичный по конструкции вышеописанному датчику угла поворота 16. Эксцентрики 7 вращаются вместе с выходным валом привода 6 (слева и справа от него), а их материал, форма, вес, параметры вращения и т.д. подбираются такими, чтобы обеспечивать максимально эффективное передвижение "мыши" за счет центробежных сил, возникающих при вращении. Датчиков приближения руки 10, 11, 12 и 13 на "мыши" устанавливается как минимум четыре штуки - один спереди, два по бокам, один сзади (типичный пример - датчик приближения (или близости) HSDL - 9100 компании Avago Technologies, инфракрасный, аналоговый, отражательного типа (излучателем является инфракрасный светодиод, приемником - фотодиод), размер 2,7*2,75*7,1 мм, обнаружение объекта на расстоянии до 60 мм, температурный диапазон составляет -40…+85 градусов Цельсия, в качестве инфракрасного узкополосного фильтра (для защиты от солнечного света или яркой лампы) применяется окрашенный поликарбонат с коэффициентом поглощения не более 10 процентов, применение - бытовая электроника, медицинское и промышленное оборудование), все они подключаются к печатной плате 2 и от нее же производится их запитка. Когда человек-пользователь подносит к датчикам приближения свою руку, то, сработав, датчики сигнализируют об этом чипсету 3, чье встроенное аппаратно-программное обеспечение вырабатывает нужные управляющие воздействия и, координируя работу описанных выше узлов и деталей и двигая корпус нужным образом относительно опорной поверхности, подводит "мышь" точно под кисть руки пользователя для ее удобного и правильного захвата. Опорной поверхностью "мыши" в данном случае является кусок ферромагнитного материала, которым может быть, к примеру, "коврик" из стального листа, снаружи покрытый резиной.
Описанным выше указательным устройством "мышь" пользуются следующим образом. Сразу же после включения персонального компьютера, к которому подключена "мышь" (а значит, и включения самой "мыши"), ее чипсет 3 (его встроенное аппаратно-программное обеспечение), анализируя данные от датчика угла поворота (встроенного в механизм поворота 8 или установленного отдельно - 16), а также от датчика положения выходного вала привода 6, вырабатывает управляющие воздействия на механизм поворота 8 и привод 6 эксцентриков 7 для выставления привода и эксцентриков в положение, соответствующее началу работы (то есть когда продольная ось привода 6 параллельна продольной оси "мыши", а эксцентрики 7 направлены вниз, как на фиг.1). Когда далее человек пользователь начинает упорно, сосредоточенно работать за компьютером, все его внимание концентрируется на программном обеспечении, в котором он работает, следовательно свою руку на "мышь" (чтобы с ее помощью передвинуть "мышиный" курсор по экрану) он кладет, не отрывая взгляда от компьютерного монитора, то есть, в сущности, как попало, не заботясь о правильном совмещении ладони и корпуса 1 "мыши" (и всего, что находится на корпусе - кнопок, колеса прокрутки и т.д.). Это приводит чаще всего к тому, что расстояние срабатывания преодолевается каждый раз не у всех четырех датчиков приближения руки 10, 11, 12 и 13, а лишь у некоторых из них. Например, если ладонь пользователя приблизилась сверху к корпусу 1 с сильным смещением назад, то сработает только один датчик приближения 13 и это заставляет чипсет 3 выработать такое управляющее воздействие, чтобы вся "мышь" соответствующим образом передвинулась назад (первоначально - до срабатывания датчиков 11 и 12, потом - до срабатывания датчика 10, всего примерно на 2/3…3/4 длины). Если ладонь пользователя приблизилась сверху к корпусу 1 с не очень сильным смещением назад, то сработают датчики приближения 11, 12 и 13, что заставляет чипсет 3 выработать такое управляющее воздействие, чтобы вся "мышь" лишь немного сдвинулась назад (до срабатывания только датчика 10, всего примерно на 1/3…1/4 ее длины). Если при приближении ладони пользователя сработают сразу все четыре датчика приближения, то такую ситуацию можно считать изначально достаточно точным позиционированием "мыши" относительно опускающейся на нее кисти руки пользователя (что обеспечит ему быстрый и правильный захват ее корпуса) и, следовательно, в перемещении "мыши" относительно опорной поверхности вообще не будет необходимости. Если ладонь пользователя приблизилась сверху к корпусу 1 со смещением вперед, то чипсет 3 вырабатывает управляющие воздействия, аналогичные описанным выше, но заставляет "мышь" при этом передвигаться не назад, а вперед. Может случиться, что датчики 11 и 12 не сработают синхронно. Это произойдет, например, если ладонь пользователя будет имееть еще и боковое смещение относительно корпуса 1. Тогда чипсет 3 должен обеспечить "мыши", кроме движения вперед-назад, передвижение еще и влево-вправо в зависимости от направления смещения приближающейся руки пользователя (то есть от того, какой из датчиков 11 и 12 сработает первым). Если первым срабатывает датчик приближения 11 (левый), то чипсетом 3 вырабатывается управляющее воздействие, сдвигающее всю "мышь" влево, до срабатывания датчика 12 (правого). Если же первым срабатывает датчик приближения 12 (правый), то чипсет 3 вырабатывает управляющее воздействие, сдвигающее всю "мышь" соответственно вправо, до срабатывания датчика 11 (левого). Передвижение "мыши" относительно опорной поверхности (под управлением чипсета 3) осуществляют электромагнит 4, привод 6 пары вращающихся эксцентриков 7 и механизм поворота 8 корпуса "мыши" в горизонтальной плоскости. Если просто включить привод 6 эксцентриков 7 в работу, то, вращаясь, эксцентрики 7 заставят привод 6 (а вместе с ним и всю "мышь") колебаться в горизонтальной плоскости и подпрыгивать за счет переменных по направлению центробежных сил. В результате никакого перемещения "мыши" относительно опорной поверхности не будет, если только не убавить (с помощью чего-нибудь) центробежные силы в том направлении, которое противоположно требуемому направлению движения. В роли такого "убавителя" вредных по направлению центробежных сил в описываемом указательном устройстве "мышь" выступает дополнительная сила трения (магнитная), возникающая из-за притяжения электромагнита 4, включающегося в работу в зависимости от положения эксцентриков 7, к опорной поверхности (из ферромагнитного материала) в моменты включения электромагнита 4 в работу. После включения привода 6 эксцентрики 7 начинают вращаться и поворачиваются из нижнего положения, показанного на фиг.1, в горизонтальное с направлением вперед. Электромагнит 4 в это время отключен (и отсутствует создаваемая им магнитная дополняющая к силе трения, порождаемой весом "мыши"), в результате возникшие центробежные силы, преодолевая трение ножек корпуса 1 об опорную поверхность, немного сдвигают привод 6 (а вместе с ним и всю "мышь") вперед. Далее в какой-то момент (после прохождения эксцентриками 7 горизонтального положения) чипсет 3 включает питание электромагнита 4 (и появляется магнитная дополняющая сила к весу "мыши"). Эксцентрики 7, продолжая вращаться приводом 6, поворачиваются из горизонтального положения в верхнее, в результате имеющиеся центробежные силы (направленные вверх и, возможно, превышающие вес "мыши") нейтрализуются как самим весом "мыши", так и силой притяжения электромагнит» 4 к опорной поверхности, а привод 6 (а вместе с ним и вся "мышь") остается на месте, не подпрыгивая вверх. Далее, продолжая вращаться, эксцентрики 7 поворачиваются из верхнего положения в горизонтальное с направлением назад, меняя соответствующим образом направление действующих центробежных сил. Поскольку электромагнит 4 в это время все еще включен (и действует значительная магнитная дополняющая силы трения), то трение ножек корпуса 1 об опорную поверхность не преодолевается направленными назад центробежными силами и привод 6 (а с ним и вся "мышь") продолжает оставаться на месте, практически не сдвигаясь назад. Наконец эксцентрики 7, продолжая далее вращаться приводом 6, поворачиваются из горизонтального положения в нижнее, соответственно направляя действующие центробежные силы вниз. Так как в этой фазе все силы (и центробежные, и вес "мыши") направлены вниз и по определению не могут преодолеть сопротивление жесткой и прочной опорной поверхности (коврика, рабочего стола, пола и т.д.), то привод 6 (а с ним и вся "мышь") продолжает оставаться на одном и том же месте до начала нового оборота эксцентриков 7. В какой-то момент (после прохождения эксцентриками 7 горизонтального положения) чипсету 3 остается только отключить питание электромагнита 4 и, получив свежую информацию от датчиков приближения 10, 11, 12 и 13, выработать решение о дальнейших действиях "мыши" (продолжении движения в том же или же противоположном направлении, повороте или остановке). Движение "мыши" как вперед, так и назад обеспечивается реверсом вращения выходного вала привода 6 и соответствующей увязкой с направлением вращения работы электромагнита 4. Включение-выключение электромагнита 4 синхронизируется с вращением эксцентриков 7 с помощью датчика положения выходного вала привода 6, вмонтированного в привод 6 и подключенного к чипсету 3. Когда вал привода 6 поворачивается в оптимальное положение для начала-прекращения действия силы притяжения электромагнита 4 к опорной поверхности, датчик положения выходного вала соответствующим образом сигнализирует чипсету 3, в ответ на что тот соответственно либо включает, либо выключает электромагнит 4, обеспечивая передвижение "мыши". Если требуется передвинуть "мышь" не только вперед-назад, но и влево-вправо, необходимо выполнить несколько поворотов (в дополнение к движениям вперед-назад) приблизительно так, как это делают автомобили, паркуясь на участке дороги, ограниченном другими машинами, для чего в конструкции предусматривается механизм поворота 8 корпуса "мыши" в горизонтальной плоскости. Если нужно повернуть корпус 1 влево, механизм поворота 8 (под управляющим воздействием чипсета 3) при помощи шестерен 5 и 9 поворачивает привод 6 вправо до появления соответствующего (ограничительного) сигнала от встроенного в механизм поворота 8 или отдельно установленного датчика угла поворота 16, направляя плоскость действия центробежных сил, возникающих при вращении эксцентриков 7, поперек продольной оси "мыши". Далее чипсет 3, управляя работой электромагнита 4 и привода 6, как описано выше, смещает заднюю часть корпуса 1 "мыши" вправо, выполняя левый разворот корпуса 1. Поворот корпуса "мыши" вправо производится аналогично, но привод 6 поворачивается, а затем смещает заднюю часть корпуса 1 "мыши" соответственно влево. Материалы, конструкция, параметры работы (развиваемая мощность, скорость вращения, ускорения при разгоне-торможении, время работы и срабатывания и т.д.), согласование между собой и т.п. узлов и деталей 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13 и 16 выбираются производителем так, чтобы обеспечить максимально эффективное (быстрое, точное, но желательно бесшумное, без вибрации и с минимальным расходом энергии) передвижение "мыши" по опорной поверхности. Вышеописанное устройство движителя "мыши" было выбрано потому, что оно позволяет обеспечивать ее передвижение при расположении движителя (и его привода, и всего остального) целиком внутри "мышиного" корпуса, без вывода за его пределы каких-либо составляющих конструкции или же их отдельных частей, что, в свою очередь, позволяет изготавливать корпус "мыши" моноблочным и, при необходимости, герметичным из-за отсутствия разрывов и технологических отверстий на его поверхности. Недостатком вышеописанного устройства движителя "мыши" является необходимость в ферромагнитном "коврике", без которого передвижение данной "мыши" будет невозможно. Избавиться от подобного недостатка позволяет конструкция, у которой на нижней стороне корпуса 1 может устанавливаться резиновая присоска, а предположим, электромагнит 4 выполняет роль вакуумного насоса, создавая разрежение воздуха под ней, работающее аналогично притяжению электромагнита к ферромагнитной поверхности. Присоску с резиновым уплотнением можно создать (на поверхности корпуса 1, скажем, вокруг сердечника электромагнита 4), запрессовав в кольцеобразную канавку на нижней стороне корпуса 1 кольцо из резины. Тогда, при подаче питания на электромагнит 4, его подвижный относительно катушки (и корпуса 1) сердечник (конструкция этого узла, естественно, должна быть немного изменена) мог бы втягиваться внутрь катушки и, работая как поршень, создавать разрежение воздуха под присоской, которое прижимало бы (с помощью атмосферного давления) корпус 1 к опорной поверхности и удерживало бы его тогда, когда ему нужно оставаться на месте. Вместо электромагнита 4, естественно, можно использовать и обычный вакуумный насос (например, поршневой с приводом от электродвигателя), который можно расположить на печатной плате 2 внутри корпуса 1, обеспечив откачку воздуха из присоски через трубопровод. Такое устройство движителя позволило бы "мыши" передвигаться практически по любой твердой и гладкой опорной поверхности (деревянной столешнице, стеклу, немагнитному металлу и т.д.), а значит, сделало бы "мышь" еще удобнее в эксплуатации. Можно также обеспечить передвижение "мыши" вообще без прижимающих ее к опорной поверхности сил (магнитных, давления атмосферы и пр.). Например, можно установить в корпусе "мыши" механизм, который за счет смещения центра тяжести "мыши" (из-за перемещения груза) вперед или назад (за передние или задние опоры корпуса) и использования момента отдачи при вращении установленного внутри маховика (или вращением самих опор), выставляет "мышь" на передние или задние опоры и, поворачивая корпус, обеспечивает "мыши" передвижение шаганием по опорной поверхности. Такая конструкция движителя (и приводов) также позволяет сделать корпус "мыши" моноблочным и даже герметичным (если возникнет необходимость обеспечить "мыши" водонепроницаемость).
Изобретение позволяет подводить "мышь" (при помощи встроенных в нее движителя (или движителей), средств выполнения поворота и их приводов) под кисть руки пользователя таким образом, чтобы обеспечивать ему быстрый и правильный захват ее корпуса даже без отрыва взгляда от экрана, серьезно экономящий рабочее время, уменьшающий утомляемость и снижающий раздражение пользователя (особенно начинающего) во время работы за компьютером.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЗАГРЯЗНЯЕМОЕ НЕЗАХВАТЫВАЕМОЕ УКАЗАТЕЛЬНОЕ УСТРОЙСТВО "МЫШЬ" | 2014 |
|
RU2586569C2 |
| НЕЗАГРЯЗНЯЕМОЕ БЕСКНОПОЧНОЕ УКАЗАТЕЛЬНОЕ УСТРОЙСТВО "МЫШЬ" | 2015 |
|
RU2601832C1 |
| УНИВЕРСАЛЬНОЕ ПЕРИФЕРИЙНОЕ УСТРОЙСТВО ДЛЯ ПЕРСОНАЛЬНЫХ КОМПЬЮТЕРОВ | 2017 |
|
RU2651157C2 |
| УКАЗАТЕЛЬНОЕ УСТРОЙСТВО "МЫШЬ" - ПЕРСОНАЛЬНЫЙ КОМПЬЮТЕР | 2017 |
|
RU2659592C2 |
| НЕЗАГРЯЗНЯЕМОЕ УКАЗАТЕЛЬНОЕ УСТРОЙСТВО "МЫШЬ" | 2013 |
|
RU2555208C2 |
| КОМПАКТНОЕ УКАЗАТЕЛЬНОЕ УСТРОЙСТВО "МЫШЬ" | 2016 |
|
RU2630165C2 |
| УКАЗАТЕЛЬНОЕ УСТРОЙСТВО "МЫШЬ" ДЛЯ ЛЮБОЙ ПОВЕРХНОСТИ | 2013 |
|
RU2557445C2 |
| УКАЗАТЕЛЬНОЕ УСТРОЙСТВО "МЫШЬ" С ПОВЫШЕННОЙ НАДЕЖНОСТЬЮ | 2018 |
|
RU2691841C2 |
| МОДУЛЬНОЕ УКАЗАТЕЛЬНОЕ УСТРОЙСТВО "МЫШЬ" | 2016 |
|
RU2624544C1 |
| УКАЗАТЕЛЬНОЕ УСТРОЙСТВО "МЫШЬ" СО СПАРЕННЫМИ МОДУЛЯМИ | 2019 |
|
RU2710738C2 |
Изобретение относится к указательным устройствам, перемещаемым пользователем. Техническим результатом является обеспечение быстрого захвата мыши за счет автоматического перемещения мыши под опускающуюся на нее ладонь пользователя. Указательное устройство ″мышь″ с облегченным захватом содержит корпус, чипсет, один или несколько датчиков приближения (близости) руки пользователя, причем в его корпусе и/или на нем может устанавливаться один или несколько движителей и средств выполнения поворота, а также обеспечивающих их работоспособность приводов, позволяющих ″мыши″ самостоятельно двигаться как минимум вперед и назад и поворачивать как минимум влево и вправо относительно опорной поверхности и/или пользователя, предоставляя тем самым ″мыши″ возможность подходить (пододвигаться) под опускающуюся на нее ладонь пользователя, когда ему необходимо захватить ″мышь″ рукой, для быстрого и правильного захвата. 1 з.п. ф-лы, 1 ил.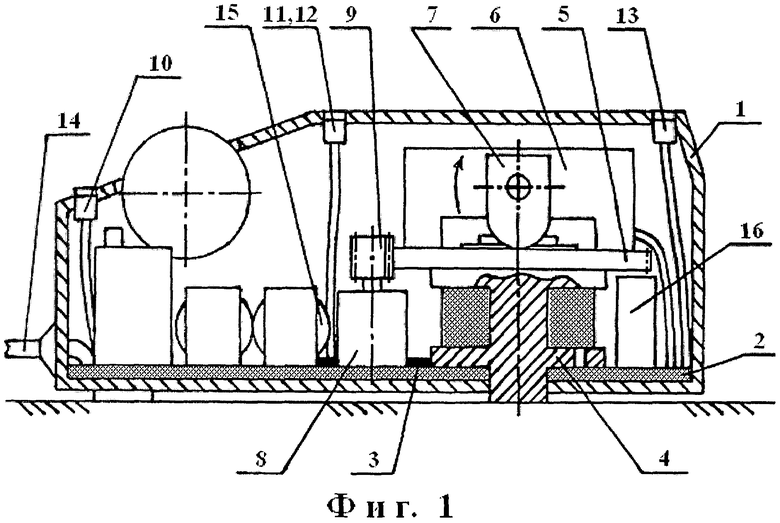
1. Указательное устройство ″мышь″ с облегченным захватом, содержащее корпус, чипсет, один или несколько датчиков приближения (близости) руки пользователя, отличающееся тем, что в его корпусе и/или на нем может устанавливаться один или несколько движителей и средств выполнения поворота, а также обеспечивающих их работоспособность приводов, позволяющих ″мыши″ самостоятельно двигаться как минимум вперед и назад и поворачивать как минимум влево и вправо относительно опорной поверхности и/или пользователя, предоставляя тем самым ″мыши″ возможность подходить (пододвигаться) под опускающуюся на нее ладонь пользователя, когда ему необходимо захватить ″мышь″ рукой, для быстрого и правильного захвата.
2. Указательное устройство ″мышь″ по п.1, отличающееся тем, что приводы движителей и средств выполнения поворота могут управляться воздействиями от чипсета ″мыши″, а сам чипсет может вырабатывать управляющие воздействия для приводов на основании данных, получаемых от датчика или датчиков приближения (близости) руки пользователя в зависимости от положения этой руки относительно корпуса ″мыши″.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СИСТЕМА ДЛЯ СОЗДАНИЯ ВХОДНОГО СИГНАЛА, УСТРОЙСТВО ДЛЯ ПРИМЕНЕНИЯ В УКАЗАННОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ВВОДА ДАННЫХ В КОМПЬЮТЕР | 2003 |
|
RU2325687C2 |
| Метчик для изготовления деревянных гаек | 1933 |
|
SU41165A1 |

