Область техники
Изобретение относится к масс-спектрометрам и к способам масс-спектрометрического анализа (масс-спектрометрии) для детектирования заряженных частиц в соответствии с отношением их заряда к массе. Изобретение может найти многочисленные применения, включая сортировку смеси частиц, идентификацию частиц, детектирование различных веществ и их очистку.
Уровень техники
Масс-спектрометрия является хорошо известным методом, включающим воздействие на заряженные частицы электрическими и/или магнитными полями с целью получения информации по значениям отношений заряда частиц к массе (q/m). В одном варианте ионизированные молекулы ускоряются с использованием заряженной пластины, установленной в области, пересекаемой перпендикулярным магнитным полем. Поскольку частицы движутся, на каждую из них действует сила Лорентца, так что ее траектория искривляется. Кривизна траектории будет зависеть от массы и заряда молекулы: частицы, более тяжелые и/или имеющие меньший заряд, будут отклоняться меньше, чем более легкие и/или сильнее заряженные частицы. Для приема отклоненных частиц используются один или более детекторов, и распределение частиц по приемникам может быть использовано для получения полезной информации, в том числе о массе частиц каждого типа и об относительном содержании различных частиц. Эти данные можно использовать для получения информации о структуре молекулы и для идентификации исследуемого вещества (исследуемых веществ). Разработаны также специализированные масс-спектрометры для конкретных применений.
Таким образом, масс-спектрометрия может применяться для различных целей, включая: идентификацию неизвестных соединений, определение изотопных составов, исследование структуры молекул, сортировку образцов смесей частиц и количественное определение вещества, содержащегося в образце в числе многих других веществ. Масс-спектрометрия может использоваться также для анализа частиц практически любого типа, которые могут быть заряжены, в том числе химических элементов и соединений, таких как лекарственные вещества, биомолекулы (включая протеины и их пептидные составляющие, ДНК, РНК, энзимы и др.), и многих других твердых веществ, например пыли.
В смежной области техники известен центробежный спектрометр (описанный в WO 03/051520 А), который служит для разделения заряженных частиц по их отношению заряда к массе под влиянием профилированного электрического поля. Подлежащие разделению частицы помещают в полость, заполненную буферным раствором, который вращается с высокой скоростью. Описаны различные средства для приложения радиального электрического поля соответствующего профиля, причем частицы разделяются по длине полости под воздействием электрической и центробежной сил, что позволяет изолировать частицы конкретных типов и провести относительные измерения. Другие устройства для разделения частиц описаны в US 5565105 А, WO 2008/132227 A, GB 1488244 А и WO 2004/086441 A.
Раскрытие изобретения
В соответствии с изобретением создан масс-спектрометр, содержащий камеру, инжектор, выполненный с возможностью инжектировать в камеру заряженные частицы, и генератор поля, выполненный с возможностью формирования по меньшей мере одного поля, действующего на заряженные частицы и имеющего улавливающий угловой компонент, сконфигурированный с возможностью образования между осью вращения и периферией камеры по меньшей мере одного канала, задаваемого энергетическими минимумами улавливающего углового компонента. Генератор поля дополнительно обеспечивает возможность вращения улавливающего углового компонента вокруг оси вращения, так что при использовании масс-спектрометра перемещение заряженных частиц ограничено посредством улавливающего углового компонента движением в угловом направлении внутри по меньшей мере одного канала вместе с указанным угловым компонентом. В результате на заряженные частицы действует центробежная сила. Поле имеет также уравновешивающий радиальный компонент, монотонно возрастающий по мере увеличения радиального расстояния от оси вращения по меньшей мере вблизи по меньшей мере одного канала, так что при использовании масс-спектрометра заряженные частицы движутся по меньшей мере по одному каналу под совместным влиянием центробежной силы и уравновешивающего радиального компонента с формированием одной или более орбит в соответствии с отношениями зарядов частиц к их массам. В состав спектрометра входит детектор, способный детектировать по меньшей мере одну из указанных орбит.
Изобретение обеспечивает также создание способа масс-спектрометрии, который включает: инжекцию заряженных частиц в камеру и формирование по меньшей мере одного поля, действующего на заряженные частицы и имеющего улавливающий угловой компонент, сконфигурированный с возможностью образования между осью вращения и периферией камеры по меньшей мере одного канала, задаваемого энергетическими минимумами улавливающего углового компонента, и уравновешивающий радиальный компонент, монотонно возрастающий по мере увеличения радиального расстояния от оси вращения по меньшей мере вблизи по меньшей мере одного канала. Способ включает также вращение улавливающего углового компонента вокруг оси вращения, в результате чего перемещение заряженных частиц ограничено посредством улавливающего углового компонента движением в угловом направлении внутри по меньшей мере одного канала вместе с указанным угловым компонентом, так что на заряженные частицы действует центробежная сила, причем заряженные частицы движутся по меньшей мере по одному каналу под совместным влиянием центробежной силы и уравновешивающего радиального компонента с формированием одной или более орбит в соответствии с отношениями зарядов частиц к их массам, и детектирование по меньшей мере одной из указанных орбит.
Сформулированная в WO 03/051520 А необходимость буферного раствора означает невозможность извлечения из пробы (образца) какой-либо абсолютной информации, например данных о массе частицы, ее составе и т.д. Однако использование угловых энергетических минимумов для создания каналов, в которые улавливаются (захватываются) заряженные частицы (согласно признакам п.1), позволяет распределить частицы по каналам в соответствии с их отношением q/m без необходимости в применении физических полостей или буферного раствора. Это не только позволяет определять абсолютную массу частиц (поскольку устраняются эффекты плавучести, связанные с буферным раствором), но и значительно упрощает конструкцию спектрометра. Кроме того, поскольку возможно одновременное образование многих орбит, можно одновременно анализировать частицы различных типов в динамическом диапазоне отношений q/m, существенно более широком, чем в известных приборах. Далее, благодаря отсутствию физических полостей можно изменять параметры устройства (такие как количество, форма и длина "виртуальных" каналов) применительно к каждому приложению просто настройкой прикладываемого поля (прикладываемых полей). По желанию такое изменение можно проводить в динамическом режиме (т.е. в процессе спектрометрии).
Следует отметить, что улавливающий угловой компонент действует на частицы в угловом направлении, т.е. под его влиянием частицы движутся (в отсутствие любых других влияний) вокруг оси вращения при постоянном значении радиуса. Уравновешивающий радиальный компонент действует на частицы вдоль радиального направления (т.е. перпендикулярно угловому компоненту). Хотя во многих случаях (например, в случае электрического поля) направление, в котором действует поле (т.е. направление обусловленной полем силы, действующей на частицы), будет параллельно направлению самого поля, это условие не является обязательным. Так, магнитное поле будет приводить к возникновению силы, действующей на заряженные частицы перпендикулярно направлению поля. Важно лишь, чтобы компоненты поля (т.е. создаваемые ими силы) действовали на частицы в угловом и радиальном направлениях.
Уравновешивающий радиальный компонент противодействует центробежной силе, действующей на частицы, так что каждая частица движется по своему "виртуальному" каналу к положению радиального равновесия, в котором центробежная и радиальная электрическая силы равны. Поскольку распределенные таким образом частицы вращаются, на каждом равновесном радиусе образуется орбита, и положения этих орбит можно измерить с помощью детектора, чтобы получить из этих измерений различные данные. Как будет описано далее, спектрометр может найти много различных применений, включая сепарацию (сортировку) частиц, определение массы, идентификацию и детектирование вещества, а также очистку.
Величины углового и радиального компонентов могут выбираться в широком диапазоне с учетом типа анализируемых частиц и условий в камере. В общем случае для частиц с большими значениями q/m требуется более слабый уравновешивающий радиальный компонент поля, чем для частиц с низким отношением q/m. В предпочтительных вариантах максимальное значение углового компонента поля для любого конкретного значения радиуса имеет тот же порядок величины, что и для радиального компонента поля при том же значении радиуса. Было обнаружено, что это облегчает стабилизацию частиц в каждом канале; однако данный признак не является обязательным.
В первом примере улавливающий угловой компонент образуется улавливающим угловым полем, а уравновешивающий радиальный компонент образуется уравновешивающим радиальным полем. Таким образом, чтобы получить нужные компоненты, формируются два отдельных поля, накладывающиеся одно на другое. Как будет описано далее, и улавливающее угловое поле, и уравновешивающее радиальное поле могут быть электрическими полями. Альтернативно, улавливающее угловое поле может быть электрическим, а уравновешивающее радиальное поле - магнитным. Использование двух отдельных полей позволяет управлять каждым полем независимо от другого поля.
Во втором примере улавливающий угловой компонент образован улавливающим угловым полем, а уравновешивающий радиальный компонент является компонентом улавливающего углового поля. Таким образом, оба указанных компонента могут быть созданы единственным полем. Это позволяет упростить средства генерирования поля и управлять орбитами частиц посредством единственного поля. Точки, в которых действующая на частицы угловая сила, вызванная полем (полями), минимальна, являются энергетическими минимумами. Энергетические минимумы предпочтительно соответствуют точкам, в которых величина углового поля близка к нулевой. В типичном случае минимум может не соответствовать самым нижним (на графике) точкам, т.е. точкам, соответствующим максимальным отрицательным значениям углового поля. При использовании прибора заряженные частицы будут мигрировать к энергетическим минимумам под влиянием углового компонента поля и удерживаться вблизи минимума, поскольку смещение относительно минимума привело бы к увеличению энергии частицы. Следует отметить, что частицы могут стабилизироваться не точно на минимуме вследствие эффектов гашения, как это будет описано далее.
Предпочтительно, чтобы энергетические минимумы соответствовали точкам пересечения нулевых уровней улавливающего углового поля. В этом случае по одну сторону (в угловом направлении) от каждого минимума поле является положительным, а по другую сторону - отрицательным. Другими словами, в энергетическом минимуме угловое поле изменяет свое направление на противоположное. Тем самым у минимума создается особенно стабильная "ловушка" для частиц, поскольку противоположные по знаку поля по обе стороны минимума будут направлять частицы к этому минимуму. Однако не все такие точки пересечения нулевого уровня способны обеспечить стабильное положение для всех частиц. Действительно, поскольку на положительно заряженные частицы будут действовать силы, противоположные силам, действующим на отрицательно заряженные частицы, точки пересечения нулевого уровня, в которых поле переходит из положительного в отрицательное, образуют стабильные ловушки только для положительных ионов, тогда как точки, в которых поле переходит из отрицательного в положительное, образуют стабильные ловушки для отрицательных ионов.
Энергетические минимумы, формирующие единственный или каждый канал, предпочтительно расположены непрерывно вдоль него. Другими словами, каждая точка по длине канала является угловым минимумом. Непрерывность минимумов позволяет заряженным частицам позиционироваться по длине канала согласно их отношению заряда к массе. Если это представляется желательным, может быть образован только один такой канал. Однако, если все частицы окажутся захваченными в одной зоне, возможны сильные эффекты взаимного отталкивания. Поэтому желательно сформировать улавливающим угловым полем более одного канала, чтобы заряженные частицы могли образовать сгустки частиц со схожим отношением заряда к массе частиц в каждом канале.
В предпочтительных вариантах по меньшей мере один канал отходит от оси вращения к периферии камеры. Представляется, что длина канала, находящегося между осью вращения и периферией камеры, может быть любой. Однако, чем больше длина по меньшей мере одного канала, тем большее количество орбит может быть образовано внутри каждого канала. Поэтому в идеале канал перекрывает все расстояние между осью вращения и периферией камеры, что дает максимально длинный канал. В других примерах единственный или каждый канал может быть разбит на несколько частей путем создания энергетических максимумов внутри поля (полей). Такое решение может быть полезно при одновременном анализе частиц с различными отношениями массы к заряду.
По меньшей мере один канал предпочтительно является радиальным, т.е. проходит по прямой между осью вращения и периферией камеры. Такой радиальный канал может иметь любую конечную длину в пределах расстояния от оси вращения до периферии камеры. В других примерах канал, расположенный между осью вращения и периферией камеры, является криволинейным. Так, в некоторых предпочтительных вариантах по меньшей мере один канал имеет форму дуги, расположенной между осью вращения и периферией камеры. Например, по меньшей мере один канал, расположенный между осью вращения и периферией камеры, может иметь форму спирали. Использование дуговых (или иных нелинейных) каналов увеличивает длину канала и соответственно увеличивает количество орбит, которые могут быть заключены внутри канала, позволяя анализировать большее количество различных отношений заряда к массе частицы. Дуговые каналы могут быть расположены близко друг к другу, чтобы увеличить возможное количество каналов в камере. Дуговые каналы формируются в зоне энергетических минимумов, как это описано выше.
В предпочтительных примерах для каждого значения радиуса улавливающее угловое поле имеет знакопеременный профиль в направлении вокруг оси вращения. Другими словами, поле изменяет свой знак при обходе вокруг оси вращения, чтобы сформировать энергетические минимумы, соответствующие точкам пересечения нулевого уровня, как это описано выше. В особенно предпочтительных вариантах улавливающий угловой компонент поля имеет синусоидальный профиль, однако возможны и другие знакопеременные профили, например в форме квадратной или треугольной волны.
Во многих вариантах улавливающий угловой компонент будет присутствовать по всей окружности камеры. Однако данный признак не является обязательным, поскольку в некоторых предпочтительных вариантах генератор поля выполнен с возможностью формирования улавливающего углового компонента только в угловой секции камеры, образованной вокруг оси вращения (охватывающей угол менее 360°). Такое выполнение может быть желательным, т.к. компоненты, служащие для формирования поля (например, электроды), могут в этом случае находиться только в данной секции камеры.
Улавливающее угловое поле предпочтительно является электрическим полем. Электрическое поле образует каналы, как это было описано. Альтернативно, улавливающее угловое поле может быть магнитным полем.
В предпочтительных примерах генератор поля содержит электродный блок углового поля, содержащий множество улавливающих электродов или улавливающих электродных элементов и источник напряжения, выполненный с возможностью подавать напряжение по меньшей мере на некоторые улавливающие электроды или улавливающие электродные элементы. Электроды могут находиться в плоскости, перпендикулярной оси вращения, например на верхней и/или нижней поверхностях камеры. Выбираемая конфигурация электродов будет зависеть от желательных профилей поля и требований к функциональной гибкости устройства.
Так, в некоторых предпочтительных вариантах электродный блок углового поля содержит по меньшей мере два улавливающих электрода, расположенных между осью вращения и периферией камеры и предпочтительно равномерно распределенных в угловом направлении вокруг оси вращения. Если угловое поле должно быть образовано в угловой секции камеры, эта секция может находиться между двумя электродами, причем при наличии более двух электродов они будут равномерно распределены в угловом направлении внутри данной секции. В зависимости от уровня напряжения, подаваемого на каждый улавливающий электрод, в поле напряжения в соответствии с профилем электрода создается пик или впадина, который (которая) будет соответствовать энергетическому минимуму в результирующем электрическом поле (поскольку электрическое поле соответствует производной от распределения напряжения по координате). Размещая электроды на равных угловых расстояниях, можно легко сформировать (если это представляется желательным) электрическое поле, обладающее вращательной симметрией.
Альтернативно, электродный блок углового поля может содержать по меньшей мере два комплекта улавливающих электродных элементов. Электродные элементы каждого комплекта расположены вдоль соответствующих линий, проходящих между осью вращения и периферией камеры, и предпочтительно равномерно распределены в угловом направлении вокруг оси вращения (аналогичный вариант применим и в случаях, когда формируется только одна угловая секция поля). Таким образом, по существу, каждый улавливающий электрод содержит комплект электродных элементов, в котором напряжение на каждый электродный элемент может подаваться индивидуально, что обеспечит улучшенную управляемость поля, как это будет показано далее.
Предпочтительно по меньшей мере два улавливающих электрода или по меньшей мере два комплекта электродных элементов расположены радиально между осью вращения и периферией камеры. Другими словами, каждый улавливающий электрод или комплект является прямолинейным и вытянутым в направлении от оси вращения к периферии камеры. Такая схема описанным образом образует радиальные каналы в угловом поле. Каждый улавливающий электрод или комплект может не перекрывать все расстояние между осью вращения и периферией камеры, а занимать любой отрезок между двумя точками, заключенными в интервале от оси до периферии камеры. Однако с целью максимизации длины каналов электроды или указанные комплекты предпочтительно перекрывают весь этот интервал.
В других предпочтительных примерах по меньшей мере два улавливающих электрода или по меньшей мере два комплекта электродных элементов расположены вдоль дуговых линий между осью вращения и периферией камеры. Такая конфигурация позволяет формировать описанные выше спиральные каналы. Электрод или комплект дуговой формы может доходить до любой точки между осью вращения и периферией камеры и может не перекрывать все расстояние между этой осью и периферией камеры.
Если представляется нежелательным зафиксировать профиль каналов посредством электродов/комплектов конкретной формы, особенно предпочтительные варианты электродного блока углового поля будут содержать двумерный комплект улавливающих электродных элементов, расположенных между осью вращения и периферией камеры. Улавливающие электродные элементы в этом случае предпочтительно образуют паттерн ортогональной решетки или гексагональной решетки или плотноупакованный паттерн, или паттерн в виде концентричных окружностей. Это позволит выбирать желательную форму каналов путем подачи напряжений на некоторые элементы из их общего числа в составе комплекта.
В некоторых примерах угловой компонент поля может приводиться во вращение вращением электродного блока углового поля по отношению к камере, т.е. генератор поля может дополнительно содержать механизм вращения, выполненный с возможностью вращения электродов углового поля или камеры. Таким механизмом может быть двигатель, несущий электродный блок углового поля.
Однако в предпочтительном варианте источник напряжения выполнен с возможностью последовательно варьировать напряжение, подаваемое на единственный или каждый улавливающий электрод или улавливающий электродный элемент, таким образом, чтобы обеспечить вращение улавливающего углового поля вокруг оси вращения. Варьирование напряжения последовательно на каждом улавливающем электроде позволяет обеспечить вращение подаваемого на электроды напряжения, что эквивалентно использованию описанного механизма вращения.
Единственный или каждый улавливающий электрод или электродный элемент предпочтительно обладает конечным (ненулевым) сопротивлением, обеспечивающим изменение напряжения по длине единственного или каждого улавливающего электрода. Желательно, чтобы величина напряжения (независимо от его знака) на единственном или на каждом улавливающем электроде или комплекте была меньше на его конце, обращенном к оси вращения, чем на конце, обращенном к периферии камеры. В типичном варианте на конец улавливающего электрода, обращенный к оси вращения, будет подано напряжение земли, а на его конец, обращенный к периферии камеры, - более высокое напряжение. Соответственно, напряжение будет изменяться по длине улавливающего электрода, поскольку он предпочтительно имеет конечное сопротивление. Это облегчает формирование электрического поля, имеющего непрерывный профиль в направлении вокруг оси вращения. В одном примере единственный или каждый улавливающий электрод или элемент содержит резистивный полимер или кремний. Данные материалы являются предпочтительными, поскольку они обладают известным удельным сопротивлением, тогда как традиционные электропроводные материалы для электродов (как правило, металлы) имеют удельное сопротивление, которое близко к нулю и не может настраиваться.
Как это описано выше, величина уравновешивающего радиального компонента монотонно возрастает с ростом радиуса по меньшей мере в угловой и/или радиальной области каждого канала. Монотонно возрастающая функция - это функция, производная от которой всегда положительна. Следует отметить, что это справедливо независимо от знака поля: так, в случае отрицательного поля с ростом радиуса поле будет становиться более отрицательным, т.е. по абсолютной величине сила поля всегда будет возрастающей. Следовательно, и величина уравновешивающего радиального компонента всегда будет возрастать с ростом радиуса. Это условие является необходимым для создания точек стабильного равновесия между направленной наружу центробежной силой и направленным внутрь уравновешивающим радиальным компонентом. Может быть выбрана любая монотонно возрастающая функция. Однако желательно, чтобы величина радиального компонента возрастала пропорционально rn, где n≥1, а r - радиальное расстояние от оси вращения. Например, уравновешивающий радиальный компонент поля может возрастать пропорционально радиусу (линейно), квадрату радиуса и т.д.
В предпочтительном примере для каждого значения радиуса величина уравновешивающего радиального компонента при обходе вокруг оси вращения является постоянной по меньшей мере для угловых положений, соответствующих единственному или каждому каналу. Эта величина необязательно должна оставаться постоянной на всем протяжении обхода вокруг оси вращения. Однако благодаря постоянству этой величины по меньшей мере в зоне каждого канала все точки равновесия будут находиться на одинаковом радиальном расстоянии, что даст круговые (или близкие к круговым) орбиты, которые можно измерить с большей точностью.
В некоторых примерах для каждого радиального расстояния величина уравновешивающего радиального компонента варьирует при обходе вокруг оси вращения. Если данная величина не является постоянной для всех угловых положений, уравновешивающий радиальный компонент предпочтительно вращается синхронно с улавливающим угловым компонентом, чтобы обеспечить пространственное согласование радиального поля с каждым каналом. Для этого генератор поля может быть выполнен с возможностью вращать уравновешивающий радиальный компонент вокруг оси вращения синхронно с улавливающим угловым компонентом.
В особенно предпочтительном варианте уравновешивающий радиальный компонент имеет первое направление по меньшей мере в одном первом угловом секторе камеры и второе, противоположное первому, направление по меньшей мере в одном втором угловом секторе. При этом первый и второй угловые сектора соответствуют первому и второму каналам в зонах угловых минимумов. Таким образом, вблизи выбранных каналов уравновешивающий радиальный компонент будет действовать на положительные частицы в направлении внутрь и на отрицательные частицы в направлении наружу, тогда как для других выбранных каналов будет справедливо обратное. Это позволит одновременно анализировать как положительно, так и отрицательно заряженные частицы.
В предпочтительном выполнении уравновешивающее радиальное поле является магнитным полем. Магнитное поле создает силу, которая действует на частицы, уравновешивая центробежную силу, так что заряженные частицы формируют одну или более орбит в соответствии с их отношением заряда к массе. Это происходит благодаря тому, что движущиеся заряженные частицы создают ток, на который действует сила Лорентца. В вариантах этого типа генератор поля предпочтительно содержит магнитную систему, а камера помещается между ее противолежащими полюсами, так что магнитное поле, созданное между полюсами магнитной системы, проходит через камеру.
Магнитная система предпочтительно содержит электромагнит, т.к. он позволяет создать сильное магнитное поле и им легко управлять. Однако можно использовать и иной генератор магнитного поля, такой как постоянные магниты.
Каждый полюс магнитной системы имеет профиль поверхности, при котором поверхность ближе подходит к камере у ее периферии, чем у оси вращения. Такой профиль обеспечивает формирование магнитного поля с величиной, монотонно возрастающей с ростом радиуса, и предпочтительно является вогнутым профилем. Сила, создаваемая в этом случае магнитным полем, является неоднородной по поперечному сечению камеры. Подобный профиль уменьшает величину магнитного поля при приближении к оси вращения, поскольку здесь расстояние между двумя полюсами максимально. Данный профиль поверхности обеспечивает требуемое монотонное возрастание силы, создаваемой магнитным полем, с ростом радиуса. Альтернативно, аналогичное неоднородное магнитное поле может быть создано при использовании при изготовлении полюсов по меньшей мере двух различных магнитных материалов, расположенных концентрично один в другом. Различие магнитных сил, создаваемых этими материалами, позволяет обеспечить ослабление магнитного поля в направлении оси вращения.
В других предпочтительных вариантах уравновешивающее радиальное поле является электрическим полем. В этих вариантах генератор поля предпочтительно содержит электродный блок радиального поля, содержащий по меньшей мере один уравновешивающий электрод, расположенный вблизи камеры и имеющий радиальный профиль, выбранный из условия обеспечения, при подаче на него напряжения, монотонно возрастающего радиального поля. Желательно, чтобы уравновешивающий электрод имел центр, находящийся на оси вращения, и, по существу, круглую периферию, окружающую указанную ось, а его толщина была выполнена изменяющейся между его центром и периферией для формирования монотонно возрастающего радиального поля. Для получения желательного эффекта может быть использован комплект уравновешивающих электродных элементов.
Уравновешивающий электрод предпочтительно является конусом с прямолинейной, вогнутой или выпуклой образующей. Форму образующей электрода можно варьировать, чтобы получить желательный профиль уравновешивающего радиального компонента. Желательно, чтобы вершина конуса была обращена к камере или от нее.
Генератор поля дополнительно содержит источник напряжения, выполненный с возможностью подачи напряжения по меньшей мере на один уравновешивающий электрод. Источник напряжения предпочтительно выполнен с возможностью варьировать выходное напряжение.
Единственный или каждый уравновешивающий электрод предпочтительно выполнен из твердого резистивного полимера или кремния. Как было описано применительно к электродам углового поля, такие материалы используются, чтобы придать электроду достаточное сопротивление и обеспечить, тем самым, возможность генерирования электрического поля с желательным профилем.
Электродный блок радиального поля может дополнительно содержать второй уравновешивающий электрод. При этом камера устанавливается между первым и вторым уравновешивающими электродами. Применение второго уравновешивающего электрода с установкой камеры между первым и вторым уравновешивающими электродами позволяет избежать искажения профиля поля в осевом направлении. Чтобы получить симметричный профиль поля, второй уравновешивающий электрод выполняется аналогичным первому уравновешивающему электроду и из того же материала.
Для создания радиального поля можно использовать и другие электродные блоки. В предпочтительном примере генератор поля содержит электродный блок радиального поля, содержащий множество кольцевых электродов, расположенных концентрично оси вращения и отделенных друг от друга диэлектрическим материалом. Источник напряжения при этом выполнен с возможностью подачи напряжения на каждый из кольцевых электродов.
В рассмотренных примерах радиальный и угловой компоненты формируются отдельными полями и накладываются друг на друга. Однако в альтернативном выполнении уравновешивающий радиальный компонент может формироваться улавливающим угловым полем. Для этого средства генерирования поля, формирующие улавливающее угловое поле, могут быть соответственно модифицированы. При этом отпадет необходимость в дополнительных генерирующих компонентах. Соответственно, электродный блок углового поля конфигурируется таким образом, что напряжение на единственном или на каждом улавливающем электроде изменяется от его конца, обращенного к оси вращения, к его концу, обращенному к периферии камеры, с формированием монотонно возрастающего радиального поля. Для этого можно использовать, например, электроды из соответственно профилированного резистивного материала или комплекты электродных элементов, расположенных вдоль каждого канала. Если используется комплект элементов, возможно точное управление радиальным компонентом и его желаемое варьирование приложением соответствующего напряжения к каждому элементу.
Альтернативно, по меньшей мере на части камеры может быть установлена двумерная решетка электродных элементов, так что профиль каждого канала не будет зафиксирован расположением электродов, а может задаваться подачей соответствующих напряжений на некоторые или на все электродные элементы.
Камера предпочтительно имеет круглое поперечное сечение, по существу, перпендикулярное оси вращения. Такая форма сечения камеры предпочтительна потому, что орбиты заряженных частиц будут стремиться принять круговую (или близкую к круговой) форму, если только уравновешивающий радиальный компонент не изменяется по величине при обходе вокруг оси вращения. Следовательно, использование пространства наиболее эффективно именно в камере с круглым поперечным сечением. Однако данный признак не является обязательным, поскольку могут использоваться камеры любой формы, включая камеры в форме куба или параллелепипеда. В особенно предпочтительных примерах камера является дисковидной или цилиндрической, причем ось вращения параллельна оси камеры и пересекает камеру. В других примерах камера может иметь кольцевое поперечное сечение, по существу, перпендикулярное оси вращения. При этом ось вращения может проходить через центральное отверстие, а не пересекать саму камеру. По желанию, камеры, имеющие некруглое поперечное сечение, также могут снабжаться центральным отверстием, круглым или некруглым.
Камера предпочтительно является вакуумной камерой, а масс-спектрометр дополнительно содержит аппарат для контроля атмосферы внутри камеры, предпочтительно откачное устройство или насос. Использование контролируемой атмосферы внутри камеры позволяет свести к минимуму аэродинамическое сопротивление для частиц (которое иначе могло бы искажать результаты) и уменьшить вероятность ложных результатов, вызванных присутствием внутри камеры посторонних веществ.
В особенно предпочтительных вариантах аппарат для контроля атмосферы внутри камеры выполнен с возможностью поддерживать внутри камеры неполный вакуум (т.е. низкое, контролируемое давление газа). Низкое давление газа внутри камеры позволяет частицам двигаться свободно, но создает эффект гашения (демпфирования), который способствует удерживанию частиц внутри каждого канала. Этот признак, однако, не является обязательным, т.к. вместо этого можно использовать поле (поля), сконфигурированное (сконфигурированные) с возможностью обеспечения жесткой локализации, в пределах которой осцилляция вокруг энергетического минимума является приемлемой.
В других случаях может оказаться желательным использовать внутри камеры более высокое давление газа, причем для поддержания увеличенного давления внутри камеры можно применить насос. Это может быть целесообразным, например, когда требуется анализировать массивные частицы, такие как клетки, при относительно низких угловых скоростях и при сильных полях. В таких случаях слишком низкое давление газа могло бы привести к пробою контролируемой атмосферы вследствие высокой интенсивности приложенных полей. Согласно закону Пашена напряжение пробоя при более высоких давлениях возрастает, поэтому повышение давления газа способно устранить возникновение пробоев.
При создании эффекта гашения (например, с помощью контролируемой газовой атмосферы внутри камеры) желательно, чтобы максимальный угловой компонент поля при любом значении радиуса имел величину, достаточную для преодоления действующей на частицы демпфирующей силы. Например, когда эффект гашения обеспечивается газом, сила, действующая на частицы со стороны максимального углового компонента поля, должна превышать действующую на эти частицы силу трения, возникающую при их контакте с газом. Было обнаружено, что это способствует удерживанию частиц внутри каждого канала. Однако данный признак не является обязательным.
В некоторых примерах масс-спектрометр может принимать заряженные частицы. Однако в предпочтительных вариантах спектрометр дополнительно содержит ионизатор, выполненный с возможностью ионизировать частицы перед их инжекцией в камеру. Подходящие ионизаторы хорошо известны. Они могут использовать электронную ионизацию (когда частицы проходят через электронный пучок) и химическую ионизацию (когда аналит ионизируется в результате ион-молекулярных реакций в процессе соударений). Ионизатор может быть выполнен отдельно от инжектора или оба они могут быть интегрированы в единый компонент. Типичный инжектор будет содержать ускоряющий электрод, который, при подаче на него напряжения, будет притягивать заряженные частицы к себе и, таким образом, к камере. Если нужно анализировать и положительные, и отрицательные частицы, могут использоваться два таких инжектора или на электрод могут попеременно подаваться положительные и отрицательные напряжения. Инжектор может быть установлен на камеру в любой ее части, например тангенциально к периферии камеры, на ее внутренней поверхности (например в центральном отверстии камеры, при его наличии) или на ее верхней или нижней поверхности в любом радиальном положении.
Генератор поля может дополнительно содержать контроллер, выполненный с возможностью управлять генератором поля с целью варьирования улавливающего углового компонента и/или уравновешивающего радиального компонента. Контроллер может являться компьютером или программируемым источником напряжения. В предпочтительных вариантах величину и/или профиль уравновешивающего радиального компонента варьируют в процессе движения заряженных частиц таким образом, чтобы отрегулировать радиус единственной или каждой орбиты. Можно варьировать также улавливающий угловой компонент, например частоту (и, следовательно, угловую скорость) его вращения, и/или профили каналов.
Как уже упоминалось, спектрометр может быть использован во многих различных приложениях; соответственно, могут оказаться приемлемыми различные методы детектирования. В определенных примерах детектор выполнен с возможностью измерять радиус по меньшей мере одной из орбит, на которых находятся частицы. Такой вариант используется, когда требуется определить массу частицы или когда неизвестен ее состав. Измерив радиус орбиты, можно определить массу частицы (частиц) на данной орбите, а это, в свою очередь, можно использовать для установления ее (их) состава.
Однако во многих других применениях измерение радиуса не является необходимым. Например, если массы исследуемых частиц известны, то будут известны и радиусы сформированных ими орбит. Поэтому в некоторых примерах детектор выполнен с возможностью детектировать орбиту частицы при одном или более заданных значениях радиуса. При фиксированной (известной) конфигурации поля детектирование частицы на заданном радиусе подтвердит присутствие определенного вещества. Альтернативно, величина радиального компонента поля может настраиваться в процессе анализа, чтобы привести орбиту в соответствие с детектором, находящимся в известном радиальном положении. При этом степень необходимой настройки может быть использована для определения масс частиц.
В других примерах детектор может быть выполнен с возможностью детектировать плотность частиц на единственной или на каждой орбите. Плотность частиц будет определять отклик детектора, что позволяет измерять изменения плотности для каждой орбиты. Эти данные можно использовать, например, для определения концентраций изотопов. В других вариантах детектор может быть настроен просто на детектирование количества орбит в заданной области, например, чтобы определить количество различных типов частиц в пробе.
Детектор может выполняться в различных вариантах. В одном предпочтительном примере детектор содержит по меньшей мере один поглощающий излучение элемент, установленный с возможностью детектировать излучение, прошедшее через камеру. Излучение, как правило, будет поглощаться частицами внутри камеры, так что ослабление интенсивности излучения, принимаемого единственным или каждым детекторным элементом, будет характеризовать количество частиц в зоне установки этого элемента. Индивидуальные детекторные элементы могут быть расположены на одном или более заданных значениях радиуса. Однако желательно, чтобы детектор содержал комплект поглощающих излучение элементов, расположенных по радиусу между осью вращения и периферией камеры. Такое выполнение позволяет детектировать орбиты на неизвестных радиусах и/или измерять радиусы сформированных орбит. В других примерах может отображаться вся камера. Преимущество такого решения в том, что для точного определения радиуса не требуется точно настраивать положение детектора относительно оси вращения, поскольку может быть измерена орбита в целом и ее радиус определен из найденного диаметра. Таким образом, детектор может содержать множество поглощающих излучение элементов, распределенных по поверхности камеры, что позволит производить большое количество измерений одновременно.
Поглощающие элементы могут детектировать рассеянное излучение. Однако детектор предпочтительно содержит источник излучения, а поглощающие элементы способны детектировать испускаемое им излучение. Это позволит устранить попадание на детектор мешающего излучения. В особенно предпочтительных примерах можно выбрать ультрафиолетовое, инфракрасное или видимое излучение, однако приемлемы и излучения иных типов.
В других вариантах представляется желательным экстрагировать (выводить) частицы из камеры после формирования ими орбит. Поэтому еще в одном предпочтительном примере детектор содержит коллектор, выполненный с возможностью собирать заряженные частицы, находящиеся на одной или более орбитах. Желательно, чтобы, коллектор содержал по меньшей мере одну выполненную в камере точку выхода, обеспечивающую заряженным частицам, находящимся на орбите (орбитах) заданного радиуса, возможность выхода из камеры, по меньшей мере один выводящий электрод, установленный снаружи камеры вблизи точки выхода, и источник напряжения для подачи напряжения по меньшей мере на один выводящий электрод. В результате при подаче напряжения по меньшей мере на один выводящий электрод находящиеся на орбите (орбитах) заданного радиуса заряженные частицы ускоряются в направлении по меньшей мере одного выводящего электрода. Таким образом, при подаче на выводящий электрод напряжения создается разность потенциалов, под действием которой заряженные частицы, находящиеся вблизи точки выхода, притягиваются к электроду, покидая камеру через точку выхода. Чтобы вывести частицы из камеры, приложенное напряжение должно быть противоположного знака по отношению к заряду частиц. Если нужно экстрагировать как положительные, так и отрицательные частицы, можно использовать два таких коллектора или по мере необходимости изменять знак напряжения на единственном коллекторе. Наличие подобного коллектора позволяет применять спектрометр для очистки вещества. Например, коллектор может быть установлен таким образом, что только определенные частицы с желательным отношением заряда к массе будут экстрагироваться из камеры. Альтернативно, можно варьировать поля в процессе работы, что позволит последовательно отбирать частицы с различных орбит.
Возможны различные варианты функционирования спектрометра. В одном своем аспекте изобретение предлагает способ сепарации пробы, представляющей собой смесь заряженных частиц, включающий инжекцию указанной пробы в камеру и осуществление вышеописанного способа масс-спектрометрии. Сепарированные частицы могут детектироваться с использованием любого из вышеописанных вариантов детектирования.
В другом своем аспекте изобретение предлагает способ измерения массы заряженной частицы, включающий инжекцию пробы, состоящей из заряженных частиц, в камеру, осуществление вышеописанного способа масс-спектрометрии, измерение радиуса по меньшей мере одной орбиты и расчет массы частицы (частиц) с использованием по меньшей мере одного измеренного радиуса.
Еще один аспект изобретения соответствует способу детектирования целевой частицы, включающему инъекцию пробы, состоящей из частиц, в камеру, осуществление вышеописанного способа масс-спектрометрии и детектирование заряженных частиц по меньшей мере при одном заданном значении радиуса, соответствующем известной массе целевой частицы. При этом детектирование заряженных частиц указывает на присутствие целевой частицы.
В следующем аспекте изобретение предлагает способ экстрагирования целевой частицы из пробы, состоящей из смеси частиц, включающий инжекцию указанной пробы в камеру и осуществление вышеописанного способа масс-спектрометрии с использованием коллектора для экстрагирования частиц с выбранной орбиты, радиус которой определяют, основываясь на массе целевой частицы. При этом желательно осуществлять непрерывную инжекцию указанной пробы в камеру и непрерывное экстрагирование частиц с выбранной орбиты. В этом случае спектрометр действует как устройство очистки.
Краткое описание чертежей
Далее со ссылками на прилагаемые чертежи будут описаны примеры спектрометров и способов спектрометрии.
На фиг.1 представлена упрощенная блок-схема, показывающая основные компоненты варианта спектрометра.
На фиг.2 показаны, на виде сверху, камера и другие компоненты, которые могут использоваться в спектрометре по фиг.1.
На фиг.3 приведены направления, на которые будут даны ссылки в тексте.
На фиг.4 представлен пример распределения напряжения согласно первому варианту.
На фиг.5 приведены графики зависимостей напряжения и электрического поля от углового расстояния для первого варианта.
На фиг.6 иллюстрируются компоненты, пригодные для формирования углового компонента поля согласно первому варианту.
На фиг.7 приведен график зависимости напряжения, прикладываемого к двум электродам, от времени.
На фиг.8 представлено распределение напряжения, которое может быть приложено компонентами, показанными на фиг.6.
На фиг.9 представлены примеры профилей напряжения и электрического поля для радиального уравновешивающего компонента.
На фиг.10 иллюстрируются компоненты, пригодные для создания радиального компонента поля согласно первому варианту.
На фиг.10а приведен векторный график, иллюстрирующий электрическое поле, приложенное с использованием компонентов по фиг.10.
На фиг.10b и 10с приведены графики, показывающие радиальные распределения напряжения и радиального электрического поля внутри камеры, показанной на фиг.10а.
На фиг.11 приведен график, представляющий радиальные силы, действующие на частицы в соответствии с первым вариантом.
Фиг.12 иллюстрирует радиальные осцилляции частицы в соответствии с первым вариантом.
Фиг.13 иллюстрирует угловые осцилляции частицы согласно первому варианту.
Фиг.14 иллюстрирует радиальные и угловые осцилляции частицы согласно первому варианту.
На фиг.15 представлены компоненты детектора согласно первому варианту.
На фиг.15а показан пример спектра, который может быть сгенерирован процессором на основе сигналов от детектора по фиг.15.
На фиг.16 схематично показаны компоненты спектрометра согласно второму варианту.
На фиг.17 схематично показаны компоненты спектрометра согласно третьему варианту.
На фиг.18 приведен график, иллюстрирующий зависимость напряжения от углового расстояния для третьего варианта.
На фиг.19 и 20 показано, с двух различных точек зрения, распределение напряжения, используемое в четвертом варианте.
На фиг.21 схематично показаны компоненты спектрометра согласно пятому варианту.
На фиг.22 показано распределение напряжения, используемое в пятом варианте.
На фиг.23а-23с приведены три варианта расположения электродных элементов.
На фиг.24а и 24b приведены два примера компонентов по шестому варианту.
На фиг.25а и 25b приведены два других примера компонентов по шестому варианту.
На фиг.26 представлены компоненты по седьмому варианту.
На фиг.26а и 26b приведены графики, соответствующие примерам радиального распределения напряжения и радиального поля, приложенным с использованием варианта по фиг.26.
На фиг.27а и 27b приведены графики, соответствующие примерам радиального распределения напряжения и радиального поля, приложенным с использованием модификации седьмого варианта.
На фиг.28 схематично изображены компоненты альтернативного детектора.
Осуществление изобретения
Фиг.1 схематично иллюстрирует некоторые из основных компонентов масс-спектрометра, пригодных для осуществления вариантов, описываемых далее. Генератор 3 поля служит для генерирования одного или более полей внутри камеры 2. Как будет описано далее, генерируется (генерируются) поле (поля) такого типа, которое (которые) воздействует (воздействуют) на заряженные частицы внутри камеры 2. Приемлемыми являются, в типичном случае, электрическое и/или магнитное поля, и генератор 3 поля будет сконфигурирован с учетом этого. Инжектор 7 служит для инжекции заряженных частиц в камеру 2. Инжектор может получать заряженные частицы от источника, внешнего по отношению к спектрометру; альтернативно, спектрометр может содержать ионизатор 6. На фиг.1 ионизатор 6 связан с инжектором 7 таким образом, что частицы, приобретшие заряд в ионизаторе 6, могут поступать в камеру 2. Ионизатор 6 и инжектор 7 могут быть выполнены в виде единого компонента или двух отдельных компонентов.
В предпочтительных вариантах в камере 2 поддерживается низкое давление газа (неполный вакуум), так что может быть предусмотрено откачивающее устройство 9, такое как насос. Как будет объяснено далее, его присутствие не является обязательным. Для получения результатов из камеры 2 служит детектор 4. Возможны различные варианты детектора, от устройства для получения изображений частиц внутри камеры 2 до устройства для экстракции частиц из нее.
В большинстве случаев генератор 3 поля будет подключен к контроллеру 5, такому как компьютер или иной процессор. Контроллер 5 может использоваться для управления протяженностью, формой, величиной и направлением полей, создаваемых генератором 3 поля. Если же поле не должно изменяться, контроллер может отсутствовать. Контроллер 5 может быть подключен также к детектору 4, чтобы осуществлять мониторинг получаемых результатов и их обработку.
Каждый из названных компонентов, как и функционирование спектрометра в целом, будут подробно описаны далее на примере приводимых вариантов.
На фиг.2 представлен, на виде сверху, пример камеры 2, пригодной для использования в спектрометре. В этом примере камера 2 выполнена в форме диска с круглым поперечным сечением и с малым отношением высоты к диаметру. Например, диаметр камеры может составлять порядка 2 см, а ее высота вдоль оси - около 0,5 см. Форма камеры 2 может быть любой, хотя камера с круглым поперечным сечением является предпочтительной. В частности, можно использовать сферические, цилиндрические или кольцевые камеры. Круглые поперечные сечения предпочтительны потому, что в типичном случае частицы будут двигаться по круговым (или почти круговым - см. фиг.24, 25) орбитам, так что круглые в сечении камеры оказываются наиболее пространственно эффективными. Однако те же орбиты формировались бы в камерах любой формы, включая камеры в форме куба или параллелепипеда. В предпочтительных вариантах камера 2 является вакуумной, т.е. она выполнена герметичной, чтобы обеспечить возможность точного управления ее внутренней атмосферой с помощью соответствующих средств, таких как вышеупомянутый насос 9. Стенки камеры 2 предпочтительно изготовлены из материала, который не адсорбирует ионы или на который может быть нанесено, в виде покрытия, соответствующее поверхностно-активное вещество. В особо предпочтительных вариантах достигается слабое отталкивание (или, наоборот, притягивание) положительных ионов стенками камеры, например имеющими соответствующее покрытие. Однако данные свойства не являются критичными.
В этом примере ионизатор 6 и инжектор 7 расположены на периферии 2а камеры 2, у ее входа. Фактически точка входа может находиться в любом месте поверхности камеры 2, в том числе в ее центральной зоне (т.е. на оси 8 вращения или вблизи нее) или на любом радиальном расстоянии между осью вращения и периферией камеры. Ионизатор 6 снабжает заряженными частицами инжектор 7 для инжекции их в камеру 2. Точное задание скорости и направления частиц при их инжектировании не является критичным. Таким образом, функционирование ионизатора и инжектора является, по существу, обычным.
Может использоваться любая технология ионизации. Например, для ионизации биомолекул предпочтительной может быть ионизация распылением в электрическом поле (ESI, electrospray ionisation) или матрично-активированная лазерная десорбция/ионизация (MALDI, matrix-assisted laser-desorption ionisation), поскольку данные методы хорошо известны как "мягкие" технологии, которые сохраняют заряженные молекулы неповрежденными. ESI использует аналит в жидкой фазе (например, раствор, содержащий пробу), которая прокачивается через распыляющую иглу в направлении коллектора. Между иглой и коллектором прикладывается высокая разность потенциалов. Капельки, выводимые из иглы, имеют поверхностный заряд той же полярности, что и полярность иглы. При движении капелек между иглой и коллектором происходит испарение растворителя. В результате каждая капелька сжимается до достижения так называемой рэлеевской границы, когда поверхностное натяжение уже не может удерживать приложенный заряд. В этой точке происходит взрывное разделение капельки на множество более мелких капелек. Этот процесс повторяется до тех пор, пока не останутся только индивидуальные заряженные молекулы. При работе с жидкой пробой метод ESI является особенно предпочтительным ввиду небольших размеров ESI-устройств. В методе MALDI, напротив, используется твердая смесь пробы и матрицы, которая высушивается на металлической пластине-мишени. Для испарения твердого материала используется лазер. Подходящие устройства для ESI или MALDI легкодоступны. Однако существуют и многие другие методы ионизации, которые могут оказаться предпочтительными для специализированных приложений. Например, если спектрометр должен отбирать пробы из окружающей атмосферы, можно использовать технологию ионизации воздуха. Соответствующие методы включают применение двух близкорасположенных электродов, между которыми прикладывается напряжение, выбранное равным или несколько меньшим напряжения пробоя воздуха, что обеспечивает существенную ионизацию без пробоя.
В инжекторе обычно применяется линейный ускоритель частиц, например в форме заряженной пластины, окружающей входное отверстие, или серии пространственно разделенных кольцевых электродов, проходя сквозь которые частицы получают ускорение. Генератор 3 поля служит для создания одного или более полей внутри камеры 2. Эта задача может быть решена различными путями, однако в любом случае будут генерироваться улавливающий угловой и уравновешивающий радиальный компоненты поля. Эти компоненты могут генерироваться независимо друг от друга (т.е. путем наложения двух или более отдельных полей) или формироваться единственным полем. Улавливающий угловой компонент влияет на направление движения заряженных частиц внутри камеры, так что при его воздействии на эти частицы будет действовать сила, заставляющая их двигаться по круговой траектории постоянного радиуса вокруг оси 8 вращения, как это показано стрелкой φ на фиг.3. На фиг.2 ось 8 вращения показана проходящей через центр камеры 2, что является предпочтительным, но не критичным. Уравновешивающий радиальный компонент направлен перпендикулярно угловому компоненту, в радиальном направлении, между осью 8 вращения и периферией 2а камеры, как это показано стрелкой r на фиг.3. В обоих случаях должно быть понятно, что направление, в котором соответствующий компонент поля действует на заряженную частицу, может быть непараллельным направлению самого компонента поля (как это имеет место для магнитного поля).
Улавливающий угловой компонент сконфигурирован так, чтобы он включал энергетические минимумы, подобранные из условия формирования между осью 8 вращения и периферией 2а камеры одного или более "каналов", в которые будут улавливаться заряженные частицы. Способ, которым решается данная задача, будет описан далее. Генератор способен вращать улавливающий угловой компонент вокруг оси 8 вращения, так что захваченные частицы будут также вращаться вокруг оси, причем на каждую частицу будет действовать центробежная сила.
Уравновешивающий радиальный компонент служит для противодействия центробежной силе. В результате, под влиянием центробежной силы и уравновешивающего радиального поля, захваченные частицы будут мигрировать внутри каналов, сформированных полем. Уравновешивающее радиальное поле сконфигурировано так, что его величина монотонно возрастает с ростом радиального расстояния от оси 8 вращения. Это позволяет получить стабильные точки равновесия вдоль каналов, у которых будут локализованы заряженные частицы с определенным отношением заряда к массе (q/m). Поскольку улавливающее угловое поле является вращающимся, каждая частица в установившемся режиме будет двигаться вокруг оси вращения, как это иллюстрируется на фиг.2 орбитами (i) и (ii) для частиц двух различных типов. Радиус каждой такой орбиты определяется отношением заряда к массе заряженной частицы; следовательно, внутри каждого канала частицы с близкими отношениями заряда к массе будут находиться на близких орбитах. На фиг.2 наружная орбита (i) с радиусом r1 соответствует частице с меньшим отношением заряда к массе q1/m1, чем аналогичное отношение q2/m2 у частицы с орбитой (ii), имеющей меньший радиус r2. Таким образом, более тяжелые частицы с небольшим зарядом будут иметь орбиты большего радиуса, чем более легкие частицы с большим зарядом. Имеется много способов определения подобных орбит, как это будет описано далее. Радиус каждой орбиты дает информацию о массе (и заряде) частиц.
Величина радиального и углового полей будет зависеть от конкретного приложения, причем ее можно выбирать в широком диапазоне. Что касается радиального компонента, частицы с высоким значением q/m требуют менее сильных полей, чем с малым q/m (тяжелые частицы). Любая используемая сила поля предпочтительно не должна превосходить порог пробоя для атмосферы внутри камеры (при наличии такой атмосферы). Типичные значения силы поля лежат в интервале 1-10 кВ/см, но возможны и значения до около 40 кВ/см, что приблизительно соответствует верхней границе для воздуха, за которым, согласно кривой Пашена, наступает его пробой.
По желанию, угловой компонент поля может быть сделан более слабым, чем радиальный компонент, поскольку его функция состоит в том, чтобы ускорить частицы до определенной угловой скорости, и он не должен уравновешивать значительную противодействующую силу. В предпочтительных вариантах максимальный угловой компонент поля на любом радиусе может быть того же порядка величины, что и радиальный компонент поля на том же радиусе. Было обнаружено, что такое соотношение способствует быстрому захватыванию частиц каждым каналом. Однако этот признак не является обязательным.
По сравнению с известными технологиями масс-спектрометрии прибор по изобретению обеспечивает анализ с более высоким разрешением для очень широкого интервала отношений заряд/масса, причем этот интервал можно изменять динамически (в процессе работы) путем настройки прикладываемых полей. Благодаря этому в небольшом, компактном приборе можно анализировать и крупные, и малые частицы. Целый ряд факторов ограничивает возможности известных масс-спектрометров анализом частиц с относительно малой массой, например менее 20 кДа. В основном, это обусловлено падением разрешения для частиц с большой массой. В то же время прибор по изобретению способен работать за пределами этого диапазона, вплоть до молекулярных весов порядка мегадальтонов при обеспечении высоких разрешений в малом объеме, поскольку, в отличие от известных спектрометров, частицы в нем движутся только по замкнутым траекториям, которые являются в высокой степени сфокусированными, как описано выше. Это открывает потенциальные возможности анализа больших молекул ДНК, протеинов и даже клеток. При этом прибор в равной степени адаптирован к анализу малых частиц, таких как неорганические соединения.
На фиг.4 приведен схематичный график, иллюстрирующий распределение напряжения, прикладываемого к камере согласно первому варианту изобретения. В этом варианте электрическое улавливающее угловое поле и электрическое уравновешивающее радиальное поле создаются отдельно друг от друга и взаимно накладываются с получением распределения напряжения, представленного на фиг.4. Можно видеть, что в этом примере напряжение при обходе вокруг оси 8 вращения следует синусоидальному профилю, т.е. на любом расстоянии по радиусу от оси 8 вращения профиль распределения напряжения по углу является синусоидальным. В результате на любом радиусе формируется последовательность впадин 10 и пиков 11 напряжения. Пики 10 напряжения и впадины 11 напряжения соответствуют точкам минимальной энергии результирующего электрического поля, как это показано со ссылкой на фиг.5, которая иллюстрирует взаимосвязь между приложенным напряжением и результирующим электрическим полем для направления, соответствующего углу φ. Следует отметить, что угловой компонент не обязательно должен создаваться с охватом всей камеры: например, в шестом варианте, описываемом далее, данный компонент создается только в одной секции камеры.
Как уже отмечалось, в рассматриваемом примере напряжение V имеет синусоидальный профиль и, поскольку электрическое поле пропорционально производной распределения напряжения по пространственной координате (т.е. Е=dV/dφ), электрическое поле Е также будет синусоидальным, со сдвигом по фазе относительно напряжения, составляющим π/2 (т.е. будет косинусной функцией угла φ, поскольку d/dφ(sinφ)=cosφ). Таким образом, точки, соответствующие минимальной силе электрического поля (которая в данном случае равна нулю), соответствуют пикам 11 и впадинам 10 в распределении напряжения. Как показано на фиг.4, пики и впадины напряжения на каждом радиусе являются непрерывными в том смысле, что каждый такой экстремум согласован с напряжениями на смежном радиусе с образованием каналов 13 и 14 между осью 8 вращения и периферией камеры. Каналы 13 соответствуют впадинам ("канавкам") профиля напряжения, тогда как каналы 14 соответствуют пикам ("гребням"). В этом примере каждый канал 13, 14 перекрывает все расстояние между осью 8 вращения и периферией камеры, но данный признак не является обязательным.
Заряженные частицы внутри камеры 2 будут мигрировать под влиянием улавливающего углового компонента к каналам 13 и/или 14, соответствующим энергетическим минимумам. Так, на фиг.5 показано, что положительные частицы 12 будут находиться вблизи энергетических минимумов "А", соответствующих впадинам 10 в распределении напряжения. В этом примере минимумом является точка пересечения углового поля осью нулевых значений. Соответственно, по одну сторону от минимума поле является положительным, а по другую - отрицательным. В случае поля по фиг.5 положительный компонент поля будет заставлять положительные частицы двигаться направо, тогда как отрицательный компонент поля будет смещать положительные частицы влево. В частности, как показано стрелкой, положительную частицу 12, находящуюся в положении X, поле будет стремиться сместить вправо. Это будет продолжаться до тех пор, пока частица не достигнет минимума А, в котором электрическое поле изменяет направление от положительного к отрицательному. Если положительная частица 12 пересечет минимум, на нее будет действовать сила, стремящаяся сместить ее влево, как это показано стрелкой для частицы, находящейся в положении Y, т.е. в отрицательном электрическом поле. В результате положительная частица будет эффективно захватываться (удерживаться) в угловом направлении вблизи энергетического минимума А. На практике частица будет осциллировать описанным образом вокруг энергетического минимума до тех пор, пока ее энергия не будет погашена, как это будет описано далее.
Из графика по фиг.5 можно видеть, что имеется еще и энергетический минимум В, соответствующий пику 11 в распределении напряжения. Для положительных частиц, включая частицу 12, он соответствует нестабильному положению равновесия, поскольку направление силы, действующей на частицу в случае ее смещения из точки В, будет всегда направлено от минимума. Однако для отрицательно заряженных частиц справедливо обратное: они будут в стабильном положении равновесия на пиках напряжения и в нестабильном положении равновесия во впадинах напряжения.
Точки А и В пересечения оси будут существовать в любом переменном поле, знак которого относительно оси вращения периодически изменяется. Синусоидальные угловые поля являются предпочтительными, но допустимы и поля с волнами треугольного или квадратного профиля. Предпочтительным представляется наличие энергетических минимумов в виде точек перехода поля через нулевое значение, поскольку, как показано выше, улавливающий эффект при этом особенно стабилен. Однако данный признак не является обязательным, т.е. поля с каждой стороны от минимума могут иметь одинаковый знак. Хотя это будет соответствовать нестабильному положению равновесия, при условии что улавливающий угловой компонент вращается с достаточной угловой скоростью (быстрее, чем частица может мигрировать от минимума), обеспечивается желательный улавливающий эффект. Аналогично, хотя и представляется желательным, чтобы сила поля в минимуме равнялась нулю, по описанным причинам это необязательно.
Таким образом, движение заряженных частиц внутри камеры 2 ограничивается (в зависимости от знака частиц) каналами 13 или 14, образованными энергетическими минимумами улавливающего углового компонента, причем, как следствие вращения улавливающего углового компонента, частицы вращаются вокруг оси вращения.
На фиг.6 иллюстрируются примеры компонентов генератора 3 поля, пригодные для создания улавливающего углового поля типа описанного применительно к фиг.4 и 5. Камера 2 представлена в перспективном изображении, причем, как и в предыдущем варианте, инжектор 7 находится на периферии 2а камеры. Генератор поля содержит электродный блок углового поля в форме множества электродов 15 (именуемых "улавливающими" электродами, поскольку они обеспечивают захват частиц в угловом направлении). Электроды распределены с равными угловыми расстояниями вблизи одной поверхности камеры 2, предпочтительно поверхности, перпендикулярной оси 8 вращения. Они могут находиться внутри или снаружи камеры 2. Количество электродов 15 может быть любым, хотя предпочтительно иметь более одного электрода. Далее, со ссылкой на фиг.24, 25, будет показано, что электроды 15 могут перекрывать не всю поверхность камеры, а только одну ее секцию.
Каждый электрод 15 расположен между осью 8 вращения и периферией камеры 2. При этом электроды могут перекрывать не все расстояние от оси 8 вращения до периферии, а только ту часть, в которой желательно сформировать описанный канал (описанные каналы). Имеется также источник 15а напряжения, напряжение от которого прикладывается к каждому электроду 15 (или к некоторым из них). Для наглядности на фиг.6 показаны только соединения между двумя электродами 15*, 15** и источником напряжения, но в реальном приборе такие соединения будут иметься для каждого электрода в составе блока. В этом примере к концам электродов 15, ближайшим к оси 8 вращения, прикладывается 0 В. Напряжения V1, V2 и т.д. приложены к концам электродов 15 вблизи периферии 2а камеры. По причинам, описываемым далее, на электроды предпочтительно подается "плавающее" напряжение (т.е. источник питания прикладывает к смежным электродам разность напряжений, а не абсолютные напряжения относительно потенциала земли). Источник 15а напряжения предпочтительно находится под управлением контроллера 5, который задает уровень напряжения, прикладываемый к каждому электроду, чтобы получить желаемое распределение напряжения в камере 2. Однако возможно и самостоятельное выполнение источником напряжения этой функции. Угловой профиль поля обеспечивается тщательным подбором напряжения, подаваемого на каждый электрод. Чтобы сгенерировать синусоидальный угловой компонент поля вышеописанного типа, напряжение, прикладываемое к каждому электроду, будет следовать синусоидальному распределению вокруг оси вращения. При соответствующем подборе напряжения, прикладываемого к каждому электроду, можно получать и поля другого профиля, например с треугольной или квадратной волной.
Чтобы осуществить вращение углового поля относительно камеры 2, желательно варьировать во времени, посредством источника 15а напряжения (или контроллера 5), напряжение, приложенное к каждому электроду 15, таким образом, чтобы каждое значение приложенного напряжения последовательно повторялось на каждом следующем электроде. Скорость вращения задается источником напряжения или контроллером. На фиг.7 показаны изменяющиеся во времени (согласно рассматриваемому примеру) напряжения, прикладываемые к выбранным в качестве примера электродам 15* (сплошная линия) и 15** (штриховая линия). Можно видеть, что при t=0 электрод 15* находится под напряжением V2, а электрод 15** под максимальным напряжением V1, соответствующим пику в распределении напряжения. Напряжение на каждом электроде изменяется по синусоиде (в виде треугольной волны или иным образом) с частотой, непосредственно связанной с угловой скоростью углового компонента поля. На фиг.7 для каждого электрода показаны единственный максимум напряжения и единственный минимум напряжения за время Т. Поскольку в этом примере в полном распределении напряжения имеется 8 пиков и 8 впадин (см. фиг.4), время Т соответствует 1/8 времени, требующегося для завершения полного периода изменения поля. Соответственно, в этом примере частота F вращения равна 1/(8Т). В типичном случае она лежит в килогерцевом или мегагерцевом диапазоне. Угловая скорость со равна 2πF.
Электроды 15 предпочтительно изготовлены из материала с ненулевым сопротивлением, такого как резистивный полимер или кремний, так что существует разность потенциалов вдоль радиального направления от оси 8 вращения к периферии камеры 2. Это приводит к понижению напряжения в направлении оси вращения, что облегчает создание электрического поля, непрерывного в пределах камеры. Хотя данный признак не является обязательным, он может быть полезен в некоторых предпочтительных вариантах, как это будет описано далее. Другое преимущество применения резистивных электродов состоит в минимизации силы тока (вплоть до нулевой), что приводит к сокращению энергопотребления.
На фиг.8 схематично показано распределение напряжения, которое может быть сгенерировано прибором, показанным на фиг.5, и которое иллюстрирует, прежде всего, возрастание синусоидального улавливающего углового компонента с ростом радиуса как следствие разности потенциалов вдоль каждого электрода, как это описано выше. К данному компоненту добавляется уравновешивающее радиальное поле, чтобы получить распределение напряжения, показанное на фиг.4.
На фиг.9 представлен пример распределения напряжения V для уравновешивающего радиального компонента и результирующего радиального электрического поля Е. В этом примере напряжение возрастает пропорционально r3 и не зависит от φ. (т.е. является постоянным для конкретного значения радиуса при всех значениях φ). Как следствие, результирующий радиальный компонент электрического поля пропорционален r2. На практике сила радиального компонента электрического поля может соответствовать любой монотонно возрастающей функции r в одной или более зонах, соответствующих одному или более каналам, поскольку это позволяет получить стабильные радиальные положения равновесия, как это будет показано далее. Например, радиальное поле может изменяться пропорционально rn, где n≥1 (однако в случае n=1 электрическое поле должно быть сделано ненулевым на оси вращения, иначе единственная точка равновесия будет лежать на этой оси).
Профили радиального поля, для которых сила поля на конкретном радиусе является постоянной для всех углов, являются предпочтительными, но необязательными. Поскольку частицы удерживаются угловым полем в пределах каналов, именно здесь будет иметь место радиальная миграция. Поэтому профиль радиального поля вне каналов некритичен и монотонное возрастание поля здесь необязательно. Однако, если приложенное радиальное поле не является постоянным для конкретного значения радиуса, оно должно вращаться синхронно с угловым полем, чтобы требуемый профиль радиального поля всегда соответствовал единственному или каждому каналу.
Наложение радиального распределения напряжения типа показанного на фиг.9 на угловое распределение, показанное на фиг.8, дает распределение напряжения с формой, показанной на фиг.4, т.е. содержащее радиальный и угловой компоненты.
На фиг.10 иллюстрируется пример компонентов генератора 3 поля для приложения электрического радиального поля. Камера 2 показана на виде спереди, причем электродный блок углового поля с улавливающими электродами 15 (описанный выше со ссылкой на фиг.6) показан находящимся на верхней поверхности камеры 2. Имеется также электродный блок радиального поля, состоящий из уравновешивающих электродов 17а и 17b, расположенных по обе стороны от камеры (ели это представляется предпочтительным, можно использовать единственный такой электрод). Как и улавливающие угловые электроды, каждый из уравновешивающих электродов 17а, 17b изготовлен из резистивного материала, такого как полимер или кремний, причем его толщина (размер по радиусу камеры 2) изменяется в зависимости от положения вдоль оси вращения. Так, в представленном примере уравновешивающие электроды имеют коническую форму с прямолинейной образующей. Альтернативно, образующая может быть вогнутой или выпуклой. Центральная ось единственного или каждого уравновешивающего электрода 17а, 17b в типичном случае совпадает с осью 8 вращения углового поля. Вершина каждого электрода может быть обращена к камере или от нее, хотя предпочтительно расположить электроды так, как показано на фиг.10, на которой обе вершины обращены от камеры. По желанию, каждый уравновешивающий электрод 17а, 17b может быть заменен комплектом "клиновидных" электродных элементов, распложенных на различных радиусах.
Между центральной осью уравновешивающего электрода и его круглой периферией приложено постоянное напряжение. В этом примере вершина каждого электрода заземлена, а положительное напряжение +V приложено к периферии 18а, 18b каждого электрода 17а, 17b. Это может быть осуществлено, например, с использованием контактного сердечника 19а, 19b, введенного в вершину каждого конуса, и кольцевой периферийной контактной пластины 20а, 20b. Контактные сердечники 19а, 19b могут быть заменены единственным контактным сердечником, проходящим сквозь камеру (или через центральное отверстие камеры, если она является кольцевой), вдоль оси 8 вращения. Такое выполнение облегчит получение требуемого профиля поля. Поскольку электроды 17а, 17b изготовлены из резистивного материала, между осью 8 вращения и периферией 18 электродов 17а, 17b создается разность потенциалов. Это приводит к радиальному распределению напряжения внутри камеры, подобному представленному на фиг.9.
На фиг.10а приведен векторный график, построенный по результатам анализа методом конечных элементов и иллюстрирующий направление электрического поля, созданного посредством описанного устройства. Фиг.10а соответствует наблюдению уравновешивающих электродов 17а, 17b и камеры 2 с одной стороны. Другие компоненты не показаны для большей наглядности. Длина стрелок пропорциональна силе поля, причем стрелки указывают направление электрического поля в каждой точке вблизи уравновешивающих электродов. Можно видеть, что между электродами (внутри камеры 2) поле является радиальным (т.е. перпендикулярным оси вращения). На фиг.10b представлено распределение напряжения вдоль радиуса R камеры 2 для конкретного случая, когда к перифериям электродов приложено напряжение +1000 В, а вершина заземлена (0 В). На фиг.10 с показано соответствующее радиальное электрическое поле (Ег), и можно видеть, что его величина (отрицательная) возрастает с ростом радиуса R монотонно и нелинейно, т.е. согласно требованиям.
Сгенерированные описанным образом угловой и радиальный компоненты поля могут суммироваться различными путями. Как уже упоминалось, угловой компонент может генерироваться специальным источником питания отдельно от источника постоянного напряжения, используемого для получения радиального компонента. В этом случае напряжение на улавливающих электродах должно быть "плавающим" относительно приложенного радиального напряжения, т.е. напряжение, прикладываемое к улавливающим электродам, предпочтительно должно иметь форму разности напряжений, приложенной между смежными электродами, а не являться абсолютным напряжением (определяемым относительно потенциала земли), которое существенно исказило бы радиальное распределение напряжения. При таком питании улавливающих электродов напряжение на каждом таком электроде будет равно сумме радиального и углового напряжений. Другой способ достижения того же результата состоит в приложении к улавливающим электродам смещающего напряжения путем создания электрического контакта с уравновешивающими электродами через соответствующие резисторы или резистивный материал. Альтернативно, можно использовать "неплавающее" питание при условии подачи абсолютного напряжения V+dV, где V - радиальное напряжение, a dV - угловое напряжение. Этот путь может быть приемлемым для вариантов, описываемых далее.
После того как будет обеспечено взаимное наложение углового и радиального полей, результирующее распределение напряжения в любой точке внутри камеры будет суммой двух напряжений и иметь вид по фиг.4. Как уже упоминалось, радиальное поле может иметь существенно большую величину, чем угловой компонент поля. В результате профиль радиального поля будет доминирующим, так что направление радиального поля может выбираться так, как это представляется необходимым. Например, из фиг.8 можно видеть, что при наличии только углового поля впадины соответствуют напряжениям, которые являются отрицательными относительно напряжения на оси 8 вращения, а пики - напряжениям, которые являются положительными относительно этой оси. Следовательно, данному распределению присущ радиальный компонент поля, который у пиков направлен к оси вращения, а у впадин - к периферии. Добавляя описанным образом сильное радиальное поле, можно добиться того, что радиальные силы в любой точке поля будут действовать в одном направлении. Этот случай показан на фиг.4, из которой можно видеть, что каналы, образованные как пиками, так и впадинами, соответствуют более высоким напряжениям, чем на оси 8 вращения, так что во всех точках радиальное поле направлено внутрь. Альтернативные конфигурации имеют свои преимущества, которые будут рассмотрены далее.
В примере, представленном на фиг.4, окончательное распределение напряжения описывается выражением V=A(r/R)3+B(r/R)sin(Nφ+ωt), где А и В - константы, r - радиальная координата, φ - угловая координата, t - временная координата, R - желательная радиальная протяженность поля (например радиус камеры), N - количество длин волн углового компонента, укладывающихся в один полный обход вокруг оси вращения, а ω - угловая скорость, с которой вращается угловой компонент. В этом примере N=8, и это означает, что один полный обход включает 8 впадин и 8 пиков напряжения, соответствующих 16 каналам, половина которых будет образовывать стабильные "ловушки" для любой заданной частицы. При этом N может иметь любое значение. Предпочтительно, чтобы оно являлось целым числом; однако данный признак не является обязательным. Чем больше значение N, тем больше количество доступных каналов и, как следствие, упрощаются проблемы, связанные с взаимным отталкиванием схожих частиц, поскольку меньше частиц будет улавливаться (захватываться) в каждом отдельном канале.
Частицы, уловленные в любом из каналов, мигрируют в нем под комбинированным воздействием радиального компонента поля и центробежной силы. Как уже было описано, сила, действующая на частицы вследствие наличия радиального компонента поля, должна быть направлена внутрь, чтобы противодействовать центробежной силе, направленной наружу. Таким образом, если нужно анализировать положительно заряженные частицы, приемлемыми будут распределения напряжения типа показанных на фиг.4 (в которых напряжения вблизи оси вращения всегда являются более отрицательными, чем на периферии). Если же нужно анализировать отрицательные частицы, требуется обратное соотношение. В любом случае величина радиального поля будет монотонно изменяться так, как уже было описано, независимо от его направления. В некоторых вариантах одновременно могут анализироваться положительные и отрицательные частицы (эта возможность будет рассмотрена далее).
На фиг.11 показаны радиальные силы, действующие на частицу в канале. Центробежная сила Fc, которая всегда действует на частицу в направлении наружу (на фиг.11 направо), пропорциональна mω2r, где m - масса частицы, ω - ее угловая скорость, а r - ее радиальное положение. Сила, созданная радиальным компонентом поля, направлена внутрь и, в этом примере, пропорциональна qr2, где q - заряд частицы, а r - ее радиальное положение. Как показано на фиг.11, для каждого значения отношения q/m будет иметься радиальное положение r*, в котором силы Fc и fR равны и противоположно направлены. Создание радиального поля, сила которого монотонно возрастает с ростом r (например, пропорционально r2, как показано на фиг.11), всегда будет приводить к наличию точки r*, задающей стабильное положение равновесия. Частица, флуктуирующая от r* к оси вращения (влево на фиг.11), попадет в область, где Fc>RR, так что результирующая сила будет направлена наружу, смещая частицу обратно, к r*. Аналогично, если частица проходит точку r* в направлении периферии камеры (направо на фиг.11), на нее будет действовать результирующая сила, направленная внутрь, т.е. также в сторону r*.
Таким образом, частицы будут удерживаться у равновесных радиусов r*, определяемых отношениями их заряда к массе (q/m). Частицы с близкими отношениями q/m будут группироваться вокруг r. В результате вращения углового компонента группы схожих частиц будут двигаться по орбите вокруг оси вращения.
Как отмечено выше, частицы будут стремиться осциллировать относительно положений равновесия, как в отношении своих угловых энергетических минимумов (т.е. в "виртуальных" каналах), так и радиально (относительно точек r* равновесия). Такая осцилляция не будет представлять проблемы, если поля подобраны так, что частицы локализованы внутри достаточно малого объема. Например, если впадины напряжения, формирующие каналы 13, имеют достаточно крутые стороны, положительные частицы будут эффективно осциллировать внутри узкой потенциальной ямы. Аналогично, можно управлять профилем радиального поля так, чтобы минимизировать радиальные осцилляции. Однако, чтобы повысить разрешение прибора, желательно гасить осцилляции частиц. Это требование эффективно выполняется путем поддержания внутреннего объема камеры при контролируемых давлении и температуре газа, предпочтительно созданием неполного вакуума. Тем самым обеспечивается уровень трения, препятствующий произвольному движению частиц, но в то же время не сильно подавляющий их движение под влиянием приложенных полей. Дополнительное преимущество состоит в том, что не требуется насос, способный создавать истинный вакуум (такие, как правило громоздкие, насосы могли бы ограничить мобильность устройства).
Для данной цели могут использоваться различные газы. При их выборе нужно учитывать следующие факторы:
- напряжение пробоя газа: как правило, чтобы достичь отличного разрешения, будут применяться сильные электрические поля (в интервале 10-50 кВ/см); поэтому целесообразно выбрать так называемый диэлектрический газ, такой как воздух, азот, аргон/кислород, ксенон, водород или гексафторид серы (возможно, в смеси с инертным газом), причем известны и многие другие диэлектрические газы;
- гасящий (демпфирующий) эффект газа: различные газы влияют на подвижность ионов различным образом;
- химическую инертность газа.
Было обнаружено, что приемлемым сочетанием свойств обладает ксенон, хотя пригодны для использования и другие газы (в чистом виде или в смесях).
Нужное давление газа также будет зависеть от различных факторов, в том числе от типа исследуемых частиц и силы применяемых полей. Так, во многих случаях низкое давление будет обеспечивать требуемое гашение произвольных осцилляции без подавления траекторий частиц. Однако в других случаях может потребоваться более высокое давление, чтобы избежать пробоя газа при приложении полей. Это может иметь место, например, когда требуется анализировать массивные частицы (такие как клетки) при относительно небольшой угловой скорости и сильных радиальных полях (которые необходимы, поскольку, даже при низких скоростях, на эти частицы будет действовать соответственно большая центробежная сила). Согласно кривой Пашена, напряжение пробоя воздуха будет возрастать с ростом давления.
Трение, создаваемое газом, гасит осцилляции, так что частицы теряют энергию и стабилизируются вблизи точки равновесия. Как будет показано далее, точка, у которой в конечном итоге будет стабилизирована каждая частица, необязательно совпадает с точкой равновесия. Однако любое подобное смещение, как правило, будет пренебрежимо мало по сравнению с радиусами орбит и поэтому не оказывает заметного влияния на результаты. Кроме того, по желанию, смещение можно учесть при обработке результатов.
В рассматриваемом далее примере сделано несколько упрощений с целью линеаризировать уравнения и вывести аналитическое решение, которое квантифицирует кинематические характеристики заряженных частиц вблизи положения равновесия. Для радиального электрического компонента поля принимается линейный профиль (т.е. Е пропорционально r). Аналогично, принимается, что угловой компонент вблизи точки равновесия аппроксимируется линейным полем (см. фиг.5).
Следовательно, угловой компонент поля будет иметь вид:

где А и В константы. Радиальный компонент поля имеет вид:

где С и D константы. Отрицательный знак при С означает, что поле будет отрицательным, т.е. действующим на положительные частицы в направлении внутрь.
Центробежная сила, действующая на частицы, задается выражением:

Теперь могут быть записаны следующие динамические выражения. В радиальном направлении:

где m - масса частицы, q - заряд частицы, а p - коэффициент трения, обусловленный контролируемым давлением газа внутри камеры. Апостроф' использован, как это принято, для обозначения производных. В угловом направлении:

Подставляя профили полей в уравнения (4) и (5) и решая различные уравнения для граничных условий, получим следующие уравнения движения. В радиальном направлении:

В угловом направлении:

Отсюда следует, что при t→∞ частицы стремятся к точкам равновесия, определяемым как:
и
Следует отметить, что φ - это мера расстояния в угловом направлении, а не угол.
Частоты fr и fφ осцилляции вокруг положения равновесия (которые не следует смешивать с частотой F вращения углового поля) определяются выражениями:

и
Далее, со ссылками на фиг.12, 13 и 14, будет рассмотрен пример, в котором использованы следующие параметры:
частота вращения F(=ω/2ττ)=100 кГц;
коэффициент трения p=1×10-19 Нс/м;
масса частицы m=50 кДа (дальтон - это универсальная атомная единица массы);
заряд частицы q=+1;
начальный радиус r0=1 см;
начальное положение радиуса φo=0 радиан;
A=-2×106;
B=0;
C=2×107;
D=5×103.
На фиг.12 иллюстрируются осцилляции относительно равновесного радиуса (соответствующего r=0) за период времени, слегка превышающий 0,0005 с. Можно видеть, что происходит гашение осцилляции, так что к моменту t=0,0005 с частица более или менее стабилизировалась на равновесном радиусе. На фиг.13 иллюстрируются угловые осцилляции за период времени, продленный до t=0,001 с. В этом случае точка равновесия постоянно перемещается вследствие вращения углового компонента поля, и это приводит к изменению положения частицы во времени относительно "нулевого" положения. Тем не менее, к моменту t=0,001 с осцилляции уменьшились почти до нулевой амплитуды. На фиг.14 иллюстрируются, путем эффективной комбинации фиг.12 и 13, двумерные осцилляции в 2D за период t=0,001 с. Верхние точки графика соответствуют стабилизировавшейся частице, осцилляции которой сведены практически к нулю.
В вариантах, в которых используется описанное гашение (демпфирование) осцилляции, желательно, чтобы максимальное угловое поле на каждом радиусе было достаточным для преодоления эффекта гашения. Другими словами, если гашение обусловлено присутствием газа, сила, приложенная к частице максимальным угловым полем, предпочтительно должна превышать любое трение между частицами и газом при угловой скорости ω. Было обнаружено, что данный признак способствует удержанию частиц внутри каждого канала; однако, он не является обязательным.
Орбиты, формируемые частицами, могут детектироваться различными способами. В рассматриваемом примере детектор 4 содержит комплект детекторных элементов 16 (см. фиг.6). Детекторные элементы могут быть установлены внутри камеры 2; альтернативно, стенка камеры может быть прозрачной для излучения в зоне расположения каждого детекторного элемента 16. Может быть использовано любое количество детекторных элементов 16, каждый из которых представляет собой фотодетектор, такой как ПЗС, который генерирует сигнал при приеме излучения. Выход каждого элемента подключен к процессору, такому как контроллер 5.
Частицы внутри камеры 2 будут стремиться поглотить излучение или иным способом препятствовать его прохождению сквозь камеру. Поэтому интенсивность излучения, принимаемого детекторными элементами 16, расположенными смежно с орбитами частиц, будет уменьшенной. Для этой цели можно использовать рассеянное излучение; однако в предпочтительных примерах детектор 4 может дополнительно содержать источник 16а излучения, испускающий излучение, которое должно приниматься детекторными элементами 16. Благодаря применению специализированного источника излучения и соответствующей настройке детекторных элементов могут быть ослаблены мешающие эффекты, вызванные рассеянным излучением. Можно использовать любой тип излучения, включая излучение в видимой области, однако предпочтительным является ультрафиолетовое излучение.
Интенсивность излучения, принимаемого каждым детекторным элементом 16, может быть использована для определения положения орбит частиц, а также плотностей частиц на каждой из орбит.
На фиг.15 более подробно показан детекторный узел. Линейка детекторных элементов 16 ориентирована вдоль радиуса, т.е. расположена между осью 8 вращения и периферией камеры 2 на ее нижней стороне. Источник 16а излучения установлен с противоположной стороны камеры; он может иметь и другие положения при условии, что стенки камеры полностью прозрачны. Испущенное излучение ER проходит через внутренний объем камеры 2, причем его часть, зависящая от положения и плотности орбит О частиц внутри камеры 2, достигает детекторных элементов 16. Сигналы, характеризующие интенсивность, передаются на процессор, который в данном примере генерирует спектр, представленный на фиг.15а. Каждый пик в спектре соответствует определенной орбите частиц, радиус которой определяется их массой и зарядом. Как следствие, радиус каждой орбиты может быть измерен и использован для расчета массы частиц, сформировавших орбиту. Метод ионизации, например MALDI, предпочтительно генерирует частицы с зарядом, равным по величине 1 и 2 (например с зарядом +1, -1, +2, -2), так что заряд каждой частицы может быть определен достаточно просто. Другие методы, например ESI, могут генерировать состояния, соответствующие более высоким степеням ионизации. В этом случае для определения зарядов и масс по детектированным орбитам можно использовать соответствующую программу. В некоторых случаях ионизатор может создавать ионы одного и того же вещества, но с разными зарядами. При этом веществу будет соответствовать более одной орбиты. Однако, как правило, вещества будут характеризоваться единственным уровнем заряда, так что большинство схожих заряженных частиц будет стабилизироваться вокруг единственной орбиты.
Другие технологии детектирования будут рассмотрены далее. Описанные примеры используют для манипулирования частицами два электрических поля. Однако допустимы и другие подходы. Согласно второму варианту уравновешивающий радиальный компонент создается магнитным полем, а улавливающий угловой компонент является электрическим, причем он формируется так, как это было описано выше. Использование магнитного поля может оказаться предпочтительным, потому что его обычно проще реализовать, чем радиальное электрическое поле, описанное выше. При этом, однако, труднее генерировать сильные магнитные поля. В любом случае варианты с магнитным полем полезны при анализе частиц с высоким отношением заряда к массе.
На фиг.16 иллюстрируются компоненты генератора 3 поля, пригодные для создания радиального магнитного поля. Камера расположена между двумя полюсами 24, 25 магнитной системы 21. Для наглядности камера 2 изображена в увеличенном масштабе и поэтому выходит за границы зоны между магнитными полюсами. Однако с реальной камерой этого не произойдет, поскольку требуется, чтобы магнитное поле В было ориентировано, по существу, параллельно оси 8 вращения во всем объеме камеры 2. Может использоваться любой подходящий магнит, но предпочтительным является электромагнит с С-образным сердечником 22 и обмоткой 23. Текущий по обмотке ток индуцирует магнитное поле, которое может управляться контроллером 5.
Чтобы сформировать желательный профиль монотонно возрастающего поля, поверхность каждого полюса 24, 25 имеет профиль, при котором эта поверхность ближе подходит к камере 2 у ее периферии, чем у оси вращения. Более конкретно, в представленном примере поверхность каждого полюса 24, 25 (изображенная на фиг.16 штриховыми линиями) является вогнутой. Полюса предпочтительно центрированы относительно оси 8 вращения, так что их вершины лежат на этой оси. Поскольку расстояние между полюсами является наибольшим, магнитная сила, действующая между полюсами, является минимальной. Сила магнитного поля увеличивается к периферии камеры по мере взаимного сближения поверхностей полюсов. Профиль силы, создаваемой магнитным полем, будет определяться профилем поверхностей полюсов, которые можно сконфигурировать желаемым образом. В приведенном примере магнитное поле внутри камеры 2 является симметричным относительно оси 8 вращения, причем сила поля возрастает с ростом радиального расстояния от этой оси аналогично тому, как это имело место для радиального электрического поля, описанного выше со ссылкой на фиг.9. В данном примере сила магнитного поля пропорциональна rn(n>1), например, r2 или r3. Представляется также возможным использовать магнитное поле, увеличивающееся пропорционально радиусу. Однако это потребует смещение минимума магнитного поля с оси вращения, поскольку в противном случае радиальная магнитная сила и центробежная сила будут уравновешиваться только при r=0 (для всех частиц). Поэтому предпочтительным является магнитное поле, возрастающее нелинейно и монотонно. Как уже упоминалось, допустимы и многие другие профили радиального поля, причем поле может не иметь вращательной симметрии, но в таком случае оно предпочтительно должно быть вращающимся синхронно с угловым полем.
Магнитное поле, сформированное описанным образом, воздействует на заряженные частицы, движущиеся внутри камеры 2, поскольку эти частицы создают электрический ток. Поскольку движение частиц (в результате вращения улавливающего поля) является вращением, сила, обусловленная действием магнитного поля (FB=q(v×B), сила Лорентца), является радиальной. Поэтому она (вместо электрического радиального поля, примененного в первом варианте) способна противодействовать центробежной силе. При этом улавливающее угловое поле создается точно таким же образом, что и в первом варианте, т.е. с применением описанных выше блока электродов 15 и источника питания. Поскольку приложение магнитного поля не искажает электрическое улавливающее угловое поле, распределение напряжения внутри камеры 2 сохраняет форму, показанную на фиг.8 (если выбран синусоидальный профиль поля). При этом магнитное поле должно быть достаточно сильным, чтобы преодолеть радиальное электрическое поле, которое в некоторых секторах будет направлено наружу (т.е. результирующая радиальная сила, действующая на частицы, должна быть магнитной).
Поэтому частицы, как и раньше, будут находиться в каналах, образованных минимумами углового поля, и мигрировать в этих каналах под влиянием центробежной и радиальной сил (магнитного и электрического полей), образуя орбиты, как это описано выше. Как и раньше, желательно гасить осцилляции частиц, используя управляемое давление газа. Орбиты могут детектироваться с помощью детекторных элементов 16 аналогично тому, как это было описано.
В других примерах вместо профилирования полюсов магнита магнитные поля аналогичного профиля могут создаваться формированием каждого из полюсов 24, 25 с помощью концентричных магнитов различной силы.
В обоих рассмотренных вариантах улавливающий угловой компонент и уравновешивающий радиальный компонент генерировались по отдельности и накладывались друг на друга. Преимущество такого подхода в том, что каждый компонент поля можно варьировать независимо от другого компонента. Однако в третьем варианте оба компонента генерируются совместно, с помощью единственного комплекта электродов. Это упрощает конструкцию генератора поля, но требует создания более сложного профиля поля.
Для создания поля, имеющего радиальный и угловой компоненты, можно использовать электродный блок для углового поля, описанный выше со ссылкой на фиг.6. Действительно, здесь уже имеется радиальный компонент, обусловленный разностью потенциалов между концом каждого электрода, смежным с осью 8 вращения, и его концом, смежным с периферией камеры. Однако данный компонент зависит только от свойств материала электрода, так что на практике желательно дополнительно управлять профилем радиального поля, чтобы получить монотонно возрастающий радиальный компонент. На фиг.17 представлен третий вариант изобретения, в котором комплект электродных элементов распределен по поверхности камеры 2, имеющей в данном варианте форму кольца. При этом электродные элементы 30а, 30b, 30с и др. расположены вдоль радиусов 30, эффективно образуя, как и раньше, комплект равномерно распределенных линейных электродов. Выполнив каждый электрод как набор электродных элементов, можно управлять распределением напряжения как по радиусу, так и по углу, индивидуально управляя напряжением, прикладываемым к каждому элементу. Соответственно, источник 33 напряжения выполнен с возможностью подачи напряжений отдельно на каждый из электродных элементов 30а, 30b и т.д. Как и раньше, приложенные напряжения могут контролироваться самим источником 33 напряжения или подключенным к нему контроллером 5, причем каждое из приложенных напряжений изменяется во времени, чтобы обеспечить вращение поля. При этом напряжение, прикладываемое к каждому элементу, равно V+dV, где V - радиальное напряжение, a dV - угловой компонент.
В других примерах управление радиальным полем может быть обеспечено соответствующим профилированием электродов. Например, комплект электродов по фиг.6 может быть модифицирован так, чтобы толщина каждого электрода 15 (в направлении, параллельном оси 8 вращения) возрастала в направлении этой оси. Профилирование электродов определит форму радиального поля аналогично тому, как это было описано применительно к уравновешивающему электродному блоку по фиг.10.
Детектор 4, содержащий комплект детекторных элементов 16, построен аналогично предыдущим вариантам, хотя в данном случае детекторные элементы распределены по поверхности камеры, по существу, аналогично электродным элементам комплекта 30. Достоинство такого расположения в том, что радиус каждой орбиты может измеряться во множестве точек, и это приведет к более точным результатам. В развитие такого подхода решетка детекторных элементов может быть распределена по всей поверхности камеры, что позволит получать изображения целых орбит. Преимущество такого решения в том, что оно не требует точного позиционирования детекторов относительно оси вращения, поскольку радиус может быть определен по измерениям диаметра орбиты. Аналогичный результат можно получить с помощью двух линейных комплектов детекторных элементов, взаимно пересекающихся, предпочтительно на оси вращения: в этом случае круглые орбиты будут детектироваться в четырех точках, а их положения будут определяться без привязки к положению оси вращения.
Как уже отмечалось, распределение напряжения, показанное на фиг.8, можно создать с помощью единственного электродного блока типа только что описанного. Однако, как было отмечено выше, радиальное поле при обходе вокруг оси вращения изменяет направление: в области впадин это поле будет положительным (т.е. направленным от оси вращения к периферии), тогда как в области пиков оно будет иметь противоположную ориентацию. Поскольку положительные частицы будут мигрировать по окружности к впадинам, а отрицательные частицы к пикам (как это было описано при рассмотрении фиг.5), в результате на все захваченные (уловленные) частицы радиальная сила будет действовать в направлении наружу, т.е. не сможет противодействовать центробежной силе. Такая конфигурация будет не способна сформировать желательные орбиты частиц.
Чтобы решить эту проблему, может быть использовано распределение напряжения с формой, схематично показанной на графике по фиг.18. На этом графике показана часть профиля напряжения как функция углового расстояния φ для постоянного расстояния по радиусу от оси 8 вращения. Каждый пик 40 напряжения имеет "вспомогательную" впадину 41; аналогично, каждая впадина 42 напряжения имеет "вспомогательный" пик 43. Вспомогательные пики 43 имеют ту же радиальную кривизну, что и впадины 42, в которых они находятся; аналогично, вспомогательные впадины 41 имеют ту же радиальную кривизну, что и основные пики 40. Положительные частицы, попавшие во вспомогательные впадины 41, будут удерживаться в них подобно тому, как это было описано выше; аналогично, отрицательные частицы будут захвачены вспомогательными пиками 43. При этом положительные частицы, находящиеся во вспомогательных впадинах 41, и отрицательные частицы, находящиеся во вспомогательных пиках 43, будут подвергаться действию радиальной силы правильного знака, направленной радиально внутрь, т.е. противодействующей центробежной силе, чтобы обеспечить формирование орбиты. Дополнительное преимущество данной модификации, состоящее в том, что частицы обоих знаков могут анализироваться одновременно, становится возможным в результате наличия радиального поля, имеющего противоположные направления в различных секторах камеры. Однако в данной конфигурации возможна потеря пробы, поскольку любые частицы, не находившиеся в начальный момент вблизи вспомогательной впадины или пика, будут мигрировать от них (по углу) к области, в которой радиальное поле будет действовать на них в направлении наружу, заставляя такие частицы соударяться со стенками камеры.
На фиг.19 и 20 иллюстрируется четвертый вариант, использующий альтернативное решение для одновременного анализа положительных и отрицательных частиц. Устройство для приложения электрического поля, по существу, аналогично представленному на фиг.17, т.е. также использует соответствующую модуляцию напряжения, прикладываемого к каждому электродному элементу. Можно видеть, что в одной половине поля радиальное поле ориентировано в направлении оси вращения, тогда как в другой половине радиальное поле имеет противоположное направление. Поле такого типа может быть описано уравнением V(r, φ)=ArVR3Sign(Nφ)+Br/Rsin(Nφ)2, где "Sign" соответствует +1 или - 1 в зависимости от знака Nφ. В этом примере принимается, что угол φ изменяется от -π до +π.
Как и в предыдущих вариантах, положительные частицы будут мигрировать к впадинам напряжения, а отрицательные частицы - к пикам напряжения. Однако все положительные частицы в отрицательной (на фиг.20 левой) части поля будут подвергаться действию радиальной силы, направленной наружу, и поэтому будут потеряны. То же самое произойдет с отрицательными частицами в области положительного поля. Поэтому ожидаемые потери составят примерно половину пробы. Однако эти потери, вероятно, будут меньше, чем в варианте по фиг.18.
Должно быть понятно, что, с целью одновременного анализа положительных и отрицательных частиц, можно аналогичным способом сформировать различные профили поля, имеющие сектора с противоположными знаками радиального поля.
Все описанные варианты использовали прямые радиальные каналы, вдоль которых на частицы накладывались ограничения по углу. Однако такие варианты не являются обязательными, и во многих случаях целесообразно использовать альтернативные формы каналов. Пятый вариант, камера 2 и электродный блок углового поля для которого показаны на фиг.21, использует дуговые каналы. Это позволяет, не увеличивая радиус камеры 2, увеличить длину каждого канала, что позволит сформировать большее количество орбит внутри каждого канала.
Улавливающие электроды 15' сконфигурированы аналогично показанным на фиг.6, хотя здесь каждый электрод 15' является криволинейным, т.е расположен по дуге между осью вращения и периферией. Как и раньше, источник 15а напряжения подает напряжение на каждый электрод 15', изменяя это напряжение во времени, чтобы создать вращающееся поле.
Пример распределения напряжения, сформированного данным вариантом в комбинации с радиальным компонентом, сформированным, например, устройством по фиг.10, показан на фиг.22. Распределение напряжения имеет вид V(r,φ)=Ar3/R3+B(r/R)sin(φN+kr/R). Следует отметить, что каждый пик и каждая впадина распределения напряжения имеют криволинейную форму, определяемую профилем электродов 15'. Частицы (в зависимости от их знака) удерживаются у пиков или впадин точно таким же образом, как это описано выше. Частицы движутся по дуговым каналам под действием центробежной силы и радиального поля, по существу, так же, как и в предыдущих вариантах, хотя теперь на их траектории дополнительно влияет угловой компонент поля. Поэтому частицы будут двигаться к своим радиальным положениям равновесия вдоль криволинейных каналов. Результирующие орбиты могут быть детектированы точно так же, как описано выше.
Чтобы форма электродов 15 или 15' не накладывала ограничений на форму каналов, в одном особенно предпочтительном варианте электроды образованы двумерной решеткой электродных элементов 30, распределенных по всей поверхности камеры 2 или по меньшей мере по ее части. Примеры таких решеток приведены на фиг.23а-23 с. На каждой фигуре представлены, на виде сверху, камера 2 в форме диска и часть элементов 30, расположенных на камере. На фиг.23а элементы 30 образуют паттерн прямоугольной решетки, на фиг.23b - паттерн в виде серии концентричных окружностей, а на фиг.23с - гексагональный плотноупакованный паттерн. Желательный профиль поля может быть получен подачей соответствующих напряжений на некоторые или на все элементы. Чтобы проиллюстрировать этот принцип, на фиг.23а-23 с элементы 30 соответствуют элементам, на которые в любой момент времени подаются пиковые напряжения. В результате на фиг.23а формируются прямые радиальные каналы, тогда как на фиг.23b и 23с сформированы дуговые каналы. Разумеется, с помощью представленных электродных конфигураций могут быть получены каналы любой формы.
Как было отмечено выше, большая длина каналов представляется предпочтительной, поскольку она позволяет найти положения равновесия внутри камеры частицам в пределах большего интервала отношений σ/m. Поэтому каналы предпочтительно должны перекрывать все расстояние между осью вращения и периферией камеры. Однако данный признак не является обязательным, и, если это представляется желательным, каналы могут перекрывать только часть этого расстояния, не доходя до оси вращения и/или до периферии камеры.
Как уже упоминалось, не требуется, чтобы улавливающие электроды покрывали всю камеру или покрывали ее симметричным образом. Более конкретно, улавливающее угловое поле можно сформировать, используя электроды, расположенные только над угловой секцией камеры. Этот подход реализован в шестом варианте спектрометра, который и будет описан далее. На фиг.24а представлен релевантные компоненты этого варианта формирования углового поля. Другие компоненты, в том числе служащие для создания уравновешивающего радиального поля (не приведенные для большей наглядности), могут соответствовать аналогичным компонентам, описанным в предыдущих вариантах.
За счет ограничения области камеры 2, снабженной улавливающими электродами, можно уменьшить количество этих электродов и, тем самым, сократить затраты, а также упростить изготовление прибора. Кроме того, подобные варианты могут быть полезны в случаях, когда на поверхность, на которой расположены электроды, нужно поместить другое устройство (например, детектор, инжектор или экстрагирующий механизм), для которого требуется место, свободное от электродов.
В примере по фиг.24а использованы только два улавливающих электрода 15' и 15", которые задают секцию 35 камеры 2 с угловым размером Δφ. Если это требуется, в секции 35 можно разместить дополнительные электроды 15, но количество электродов не может быть меньше двух. Как уже было описано (например, в связи с фиг.6 и 21), каждый улавливающий электрод 15 расположен между осью 8 вращения и периферией камеры, причем все электроды могут производиться и управляться с применением одинаковых технологий.
Секция 35 с электродами формирует секцию улавливающего углового поля внутри камеры. Конкретные характеристики углового поля могут выбираться в соответствии с конкретными требованиями. Они могут соответствовать, например, любым профилям поля, описанным выше. Единственное различие состоит в том, что поле создается только внутри секции камеры, заданной электродами, а не полностью окружает ось 8 вращения. Данное решение аналогично маскированию части углового поля согласно предыдущим вариантам. Напряжением на каждом из электродов 15', 15" управляют аналогично тому, как это было описано, так что угловое поле внутри секции, как и раньше, вращается вокруг оси 8.
Когда инжектированные ионы пересекают секцию 35, они подвергаются воздействию, направляющему их к виртуальному "каналу", образованному угловым полем, как это было описано выше со ссылкой на фиг.5. При этом они ускоряются в результате вращения поля точно так же, как если бы поле присутствовало во всем объеме камеры. Однако как только ионы покидают секцию 35 (пройдя угловое расстояние Δφ), они будут испытывать легкое торможение в связи с отсутствием вращающегося поля и эффектами трения (рассмотренными выше со ссылками на фиг.12-14). В результате имеет место некоторое отклонение траектории ионов, что дает орбиты, которые не являются точно круговыми (см. орбиту О на фиг.24а). Когда ионы снова достигают секции 35, они снова ускоряются в угловом поле, т.е цикл повторяется. Суммарный эффект очень близок к получаемому в предыдущих вариантах, за исключением того, что орбиты частиц слегка отклоняются от круговых.
Должно быть понятно, что в данном варианте частицы заключены в виртуальных "каналах" улавливающего поля точно так же, как это было описано, несмотря на то, что поле не присутствует во всех точках на траектории вращения и действует на частицы только на части каждой орбиты. Рассмотрим первый гипотетический сценарий, когда трение отсутствует, а в секции 35 угловое поле вращается с угловой скоростью ω. Частица в этой секции будет мигрировать в угловом направлении к положению энергетического минимума (виртуальному "каналу") и, в конечном итоге, будет ускоряться до достижения угловой скорости ω. Одновременно, под влиянием центробежной силы и приложенного уравновешивающего радиального поля, частица будет мигрировать в радиальном направлении к равновесному радиусу r*. В предположении, что частица достигла равновесных условий к моменту ее выхода из секции 35, при отсутствии какого-либо трения частица продолжит движение по круговой орбите со скоростью ωr* и, совершив оборот синхронно с угловым полем, вновь войдет в секцию 35.
На практике частица будет испытывать трение, которое заставит ее уменьшить свою скорость после выхода из секции 35. В результате она будет двигаться по орбите со слегка замедленной скоростью (ωr*-dv), так что войдет в секцию 35 на слегка уменьшенном радиусе (r*-dr). Поскольку в точке возвращения в секцию частица будет слегка отставать от идеального углового положения, она будет также слегка запаздывать по фазе относительно углового поля в секции. Как следствие, частица будет испытывать воздействие большей угловой силы, направляющей ее к виртуальному "каналу", и поэтому получит большее угловое ускорение, стремящееся снова придать ей угловую скорость ω, в синхронизме с вращающимся полем. По существу, секция поля будет пытаться вернуть частицу к равновесным условиям. На практике конечный результат состоит в том, что частица не будет полностью стабилизирована в равновесных условиях, а будет двигаться по траектории, слегка отклоняющейся от идеальной круговой орбиты. Непрерывный цикл ускорения/замедления будет поддерживать среднюю угловую скорость частицы, равную ω, так что в конечном итоге частицы будут мигрировать с формированием орбит для сходных частиц, что позволит детектировать частицы и/или производить их сбор описанными выше методами.
Точно такие же принципы имеют место в отношении улавливающих электродов в форме электродных элементов. Соответствующий пример приведен на фиг.24b. Здесь такая же секция 35 задана двумя комплектами 30' и 30" улавливающих электродных элементов, каждый из которых содержит группу электродных элементов 30'а, 30'b, 30'с и т.д. Чтобы сформировать поле требуемого профиля, для каждого радиального расстояния должны иметься по меньшей мере два электродных элемента (например, 30'b и 30"b). Если это представляется желательным, для каждого радиального расстояния могут быть предусмотрены дополнительные элементы.
Секция 35 может покрывать любую часть камеры 2; кроме того, может иметься более одной секции. В общем случае секции электродов должны быть сконфигурированы так, чтобы получить достаточные размеры углового поля в пределах камеры и, тем самым, обеспечить поддержание траекторий частиц с достаточной точностью, зависящей от конкретных операционных условий. Так, на фиг.25а представлен пример, в котором электродные элементы 30 покрывают большую часть камеры, оставляя только небольшой сегмент, в котором угловое поле не будет сформировано. На фиг.25b приведен другой пример, в котором образованы 4 секции, что позволит частицам ускоряться 4 раза на каждом проходе орбиты. Все секции имеют одинаковое угловое протяжение; однако, если это целесообразно, значения Δφ1, Δφ2, Δφ3 и Δφ4 могут отличаться одно от другого.
При осуществлении вариантов, подобных показанным на фиг.24 и 25, необходимо определять параметры инжекции частиц более точно, чем в других вариантах. Это объясняется тем, что отсутствие непрерывности в отношении углового ускорения повышает чувствительность системы к скорости инжекции. Например, если частицы инжектируются со скоростью, существенно отличающейся от скорости вращающегося поля, частицам становится трудно попасть в синхронизм с полем, присутствующим внутри секции. В худшем случае частицы могут вообще не достигнуть равновесных условий. Поэтому предпочтительно сконфигурировать систему согласно шестому варианту с возможностью инжектировать частицы со скоростью, близкой к ωrinj (где rinj соответствует радиальному положению инжектора). При этом в общем случае инжекционная система должна гарантировать, что по меньшей мере некоторые частицы смогут достичь равновесных условий.
На фиг.26 представлены компоненты седьмого варианта. В этом варианте для создания уравновешивающего радиального поля вместо рассмотренных электропроводных средств применяются индуктивные средства. Ранее отмечалась целесообразность применения электродов из материала, имеющего конечное сопротивление для уменьшения токов и, следовательно, энергопотребления. Использование индуктивной схемы по седьмому варианту обеспечивает дальнейшее сокращение энергопотребления.
В этом варианте электродный блок уравновешивающего радиального поля содержит серию близкорасположенных коаксиальных кольцевых электродов 50. Три таких электрода обозначены на фиг.26 как 50а, 50b и 50с. Электроды 50 изолированы друг от друга с помощью соответствующего диэлектрика (газообразного, жидкого или твердого) в зонах 51а, 51b, 51с и т.д. Электроды 50 изготовлены из хорошего проводника, такого как металл. Симметричные группы кольцевых электродов 50 находятся на каждой стороне камеры 2. На фиг.26 нижняя группа электродов обозначена, как 50'. От источника питания (не изображен) подается соответственно распределенное постоянное напряжение. В конкретном варианте на каждый электрод подается напряжение, выбранное в интервале от 0 В (на внутреннем кольцевом электроде) до 1000 В (на наружном кольцевом электроде) с шагом изменения напряжения, пропорциональным r3 (где r - радиальное расстояние от оси 8 вращения). Угловой компонент поля может быть сформирован любым из описанных выше методов. Предназначенные для этого компоненты (для наглядности на фиг.26 не изображены) в типичном случае будут включать улавливающие электроды, расположенные между уравновешивающим электродным блоком 50 и камерой 2.
Каждый улавливающий электрод или улавливающий электродный элемент может быть электрически соединен с ближайшим кольцевым электродом 50 посредством резистора или подходящего резистивного материала, чтобы сделать напряжение на улавливающем электроде "плавающим" относительно радиального напряжения, как это описано для предыдущих вариантов.
Радиальное распределение напряжения, создаваемое электродами 50 внутри камеры 2, иллюстрируется на фиг.26а. Видно, что оно является гладким. Однако обнаружено, что соответствующее распределение электрического поля вдоль той же радиальной линии имеет ступенчатую форму, как это показано на фиг.26b. Острые пички поля могут быть сглажены путем отведения электродного блока 50 от камеры 2 в направлении z (параллельно оси вращения). Остающийся ступенчатый профиль может быть сглажен увеличением количества электродов и выполнением каждого из них тонким, насколько это возможно. Этого можно достичь путем нанесения электродов 50 методом литографии с желательной плотностью расположения. Имеется также потенциальная возможность выполнить всю конструкцию, включая детектор, в виде единственного кремниевого кристалла (чипа). Однако в предпочтительной конфигурации используется камера 2 из пластика, снабженная металлическими электродами 50, нанесенными на каждую ее сторону любым подходящим способом, включая литографию, другие методы, применяющие травление, электроосаждение и т.д. Получаемое гладкое поле обеспечивает желательное монотонное возрастание, необходимое для уравновешивания действия на частицы центробежной силы.
Наблюдаемый ступенчатый профиль обусловлен сочетанием возрастающей линейной плотности напряжения в направлении оси вращения (вследствие постоянного уменьшения радиусов кольцевых электродов) и наличия двух противолежащих распределений напряжения. Повышение линейной плотности приводит к росту интенсивности поля в направлении центра камеры. Распределение напряжения обеспечивается применением комплекта близкорасположенных электродов 50, чтобы реверсировать направление возрастания интенсивности поля для получения поля, монотонно возрастающего с ростом радиуса. В результате электрическое поле в среднем следует за уровнями напряжения, изменяющимися от электрода к электроду. Однако в пространстве между электродами влияние увеличения линейной плотности напряжения к центру камеры становится заметным и приводит к локальным спадам силы поля, дающим наблюдаемый эффект "ступенек".
Наличие "ступенек" создает как преимущества, так и недостатки. Преимущество заключается в том, что они могут действовать как ловушки, задающие в цифровой форме точки равновесия вдоль радиуса, и тем самым повышать разрешение прибора в некоторых ситуациях. Недостатком является то, что одновременно обеспечивается разрешение только такого количества типов частиц, сколько имеется ступенек. Однако ступеньки могут быть эффективно исключены путем увеличения количества электродов 50 и применения умеренного сглаживания (за счет отведения электродов от камеры). Так, на фиг.27а и 27b показаны кривые напряжения и электрического поля для модификации седьмого варианта, в которой толщина каждого электрода 50а, 50b, 50с уменьшена до 10 мкм, а плоскость установки электродов отнесена от камеры на 0,5 мм. Можно видеть, что электрическое поле в центральной части камеры имеет вид, по существу, гладкой кривой.
Главное достоинство описанной индуктивной конфигурации состоит в том, что через электроды не течет никакого электрического тока, так что энергопотребление минимально. Это объясняется тем, что каждый электрод находится под единственным потенциалом, так что по кольцу не течет ток и отсутствует электрический ток между кольцевыми электродами. Если (как было упомянуто) кольцевые электроды электрически соединены с улавливающими электродами, данная конфигурация превращается в гибридную проводящую/индуктивную систему, поскольку через резисторы будет течь небольшой ток. Однако его уровень будет минимальным. Данный вариант обладает и другими преимуществами: он является легким и может занимать меньший объем, чем другие варианты, что улучшает портативность прибора.
В рассмотренных вариантах детектор 4 установлен с возможностью проведения измерений радиусов орбит. Такие измерения часто являются желательными, но, в зависимости от конкретного применения, могут оказаться предпочтительными и альтернативные подходы. Так, вместо установки детекторных элементов по всей длине радиуса может иметься единственный детекторный элемент, установленный в заданном положении по радиусу. Это положение может соответствовать значению радиуса, вблизи которого, как ожидается, будет стабилизирована частица с известным отношением q/m. Альтернативно, это может быть произвольно выбранное (но известное) значение радиуса, а в процессе функционирования радиальный компонент поля варьируют, чтобы изменить радиальное положение равновесия r* для частиц каждого типа. Таким способом орбита может быть "сдвинута" к положению детектора, причем степень необходимой для этого перестройки поля может быть использована для определения массы частиц. Данный метод позволяет просканировать большой интервал значений q/m. Возможны и многие другие конфигурации.
Еще в одном варианте вместо создания изображений частиц внутри камеры 2 детектор может быть выполнен с возможностью извлечения (экстрагирования) частиц с одной или более орбит. Это не только обеспечивает подтверждение определения радиуса орбиты данной частицы, но и позволяет осуществить сбор частиц. На фиг.28 схематично представлен пример возможного детектора такого типа в форме коллектора 60. Камера 2 показана на виде сверху; однако коллектор 60 может быть альтернативно установлен на ее нижней стороне. В стенке камеры имеются одна или более точек 62 выхода, расположенных на заданных радиальных расстояниях от оси 8 вращения. Снаружи камеры у каждой точки 62 выхода установлен выводящий электрод 61. Как и раньше, заданные значения радиусов могут соответствовать точкам равновесия для известных частиц Р. Альтернативно, в процессе функционирования радиусы орбит могут настраиваться контроллером так, чтобы заданным значениям радиуса соответствовали орбиты частиц нужного типа. Чтобы экстрагировать частицы с заданной орбиты, на выводящий электрод 61 подается высокое напряжение соответствующего знака, так что заряженные частицы Р ускоряются в направлении данного электрода. Это позволит собрать коэкстрагированные частицы и деионизировать их (если это требуется), например растворением в соответствующем буфере.
Если это представляется желательным, может быть разработано устройство, способное осуществлять описанную экстракцию, а также являться инжектором 7.
Функциональная гибкость спектрометра позволяет использовать его во многих различных приложениях. В отношении формирования проб масс-спектрометр может быть применен, например, для улавливания агентов, присутствующих в воздухе; альтернативно, он может работать с устройствами, использующим жидкости, с ионизацией суспензированных молекул с применением технологий ESI или MALDI. Например, применительно к биологическому анализу протеины (или ДНК) можно экстрагировать из анализируемого вещества, дигерировать (переработать) и инжектировать в спектрометр для анализа. Можно также скомбинировать масс-спектрометр с микрофлюидальным устройством для проведения полного цикла анализа (включающего сепарацию, дигерирование и масс-спектрометрию) в компактном настольном или портативном устройстве. В дополнение, прибор может применяться в полевых условиях, чтобы детектировать и анализировать содержащиеся в воздухе частицы на поле боя, будучи установленным на военном транспортном средстве или даже транспортируемым личным составом. Прибор может устанавливаться в аэропортах и других общественных зданиях, чтобы обнаруживать террористические угрозы.
Из проведенного обсуждения следует, что одной из основных функций спектрометра является сепарирование пробы, состоящей из смеси частиц. Частицы с различными отношениями q/m будут распределяться по орбитам с различными радиусами и, следовательно, разделяться. Как было описано, радиусы орбит позволяют получить информацию, такую как масса частицы каждого типа. Это в свою очередь позволяет анализировать исходную композицию. Относительные концентрации частиц каждого типа в смешанной пробе могут быть оценены путем сопоставления плотностей частиц на каждой орбите. Подобные методики находят применение, в частности при анализе ДНК.
Разумеется, спектрометр может работать не только со смешанными пробами, но и использоваться в лабораторных анализах индивидуальных типов частиц, например с целью определения их массы и состава.
Спектрометр может также функционировать как детектор вещества. Так, детектор может быть настроен, например путем соответствующего программирования процессора, на распознавание орбит с определенными радиусами как соответствующих конкретным известным веществам. Присутствие орбиты на заданном радиусе может использоваться для запуска тревожного сигнала. Например, прибор может быть настроен на отбор проб из окружающей атмосферы с выдачей тревожного сигнала в ответ на присутствие загрязнений, таких как токсичные газы или частицы пыли или сажи. Компактность прибора позволяет использовать его в переносных устройствах мониторинга, которые могут даже переноситься пользователем. Альтернативно, спектрометр можно применить для анализа проб, отбираемых в специальных условиях, например из багажа в аэропортах или из ручной клади при таможенном контроле. В подобных случаях спектрометр может быть сконфигурирован для реакции на такие вещества, как известные наркотики или взрывчатые вещества.
В качестве заключительного примера, если детектор содержит коллектор, то спектрометр может быть использован для очистки веществ или для экстрагирования одного материала из смеси. Например, в случае инжекции пробы в виде смеси частиц различных типов могут быть экстрагированы, как это было описано со ссылкой на фиг.26, только частицы, находящиеся на определенной орбите. По желанию процесс может быть сделан непрерывным посредством непрерывной инжекции в камеру пробы в виде смеси и осуществления непрерывной экстракции с определенного радиуса. Альтернативно, может быть реализована заданная последовательность импульсов инжекции/экстракции. В дополнение к очистке, которая является критичной для многих отраслей, эта технология находит применение во многих приложениях, например во многих ситуациях в процессе разработки лекарств и практически в любых научных исследованиях, в которых, после определения массы молекулы, необходимы другие исследования для определения ее химической реактивности или других характеристик. В этих случаях экстрагированные частицы известного типа или с известной массой могут быть перенесены из камеры непосредственно в другое устройство проведения подобных исследований. С учетом приведенных примеров должно быть понятно, что спектрометр может быть реализован во многих вариантах и использован во многих различных приложениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРИЛОЖЕНИЯ НЕПРЕРЫВНОГО ЭЛЕКТРИЧЕСКОГО ПОЛЯ И СПОСОБ | 2012 |
|
RU2599909C2 |
| ПЛАЗМЕННЫЙ ФИЛЬТР МАСС И СПОСОБ ОТДЕЛЕНИЯ ЧАСТИЦ МАЛОЙ МАССЫ ОТ ЧАСТИЦ БОЛЬШОЙ МАССЫ | 2001 |
|
RU2229924C2 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ЗАРЯЖЕННЫХ ЧАСТИЦ ПО МАССАМ | 1996 |
|
RU2098170C1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ЗАРЯЖЕННЫХ ЧАСТИЦ ПО МАССАМ | 1998 |
|
RU2135270C1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ЗАРЯЖЕННЫХ ЧАСТИЦ ПО МАССАМ | 2000 |
|
RU2190459C2 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ЗАРЯЖЕННЫХ ЧАСТИЦ ПО МАССАМ | 1998 |
|
RU2142328C1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ЗАРЯЖЕННЫХ ЧАСТИЦ ПО МАССАМ | 1998 |
|
RU2137532C1 |
| СПОСОБ РАЗДЕЛЕНИЯ ЗАРЯЖЕННЫХ ЧАСТИЦ ПО МАССАМ | 1998 |
|
RU2147458C1 |
| СТАТИЧЕСКИЙ МАСС-АНАЛИЗАТОР ИОНОВ | 2011 |
|
RU2456700C1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ЗАРЯЖЕННЫХ ЧАСТИЦ ПО МАССАМ | 1999 |
|
RU2174431C2 |
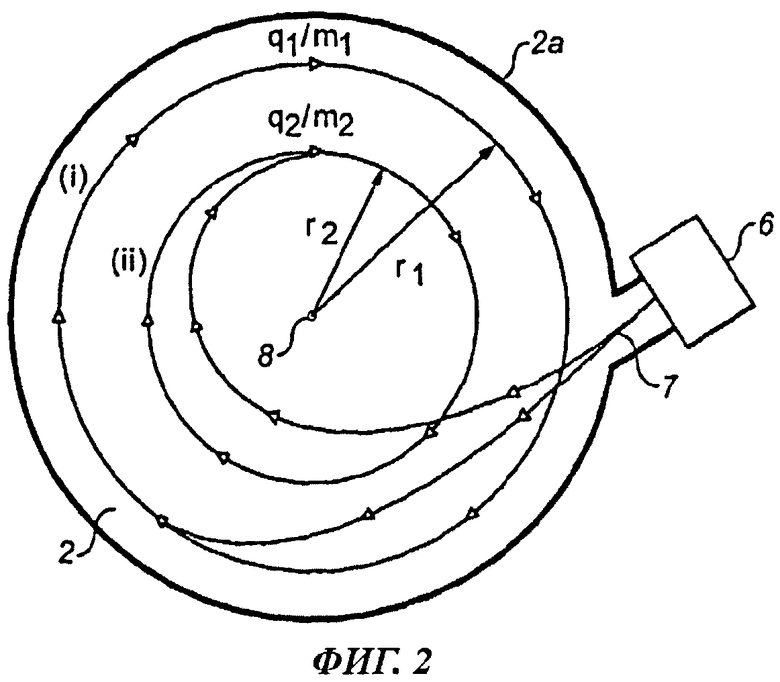
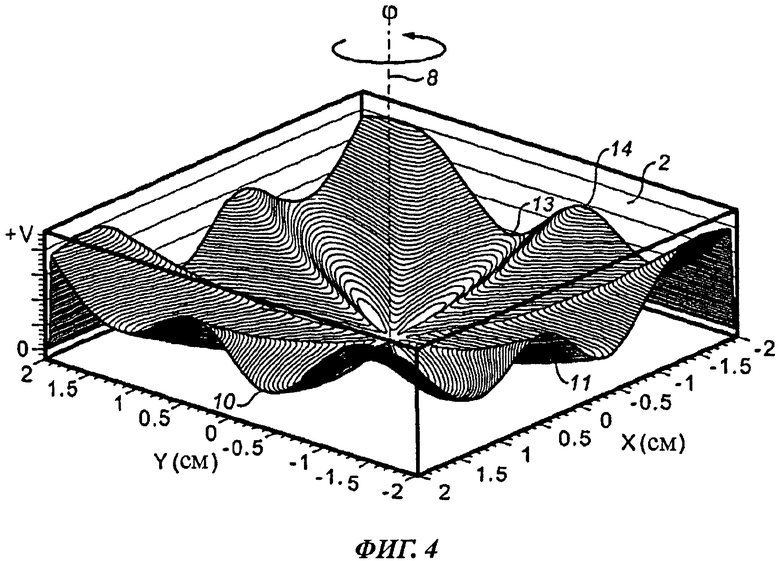
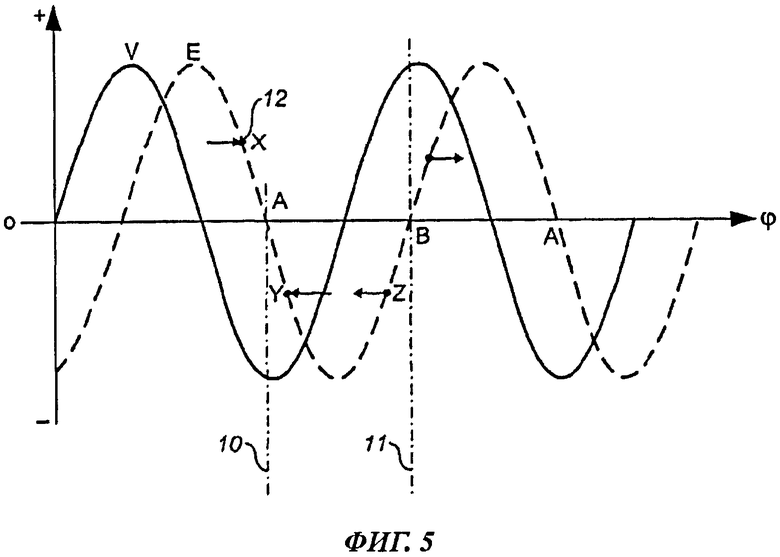
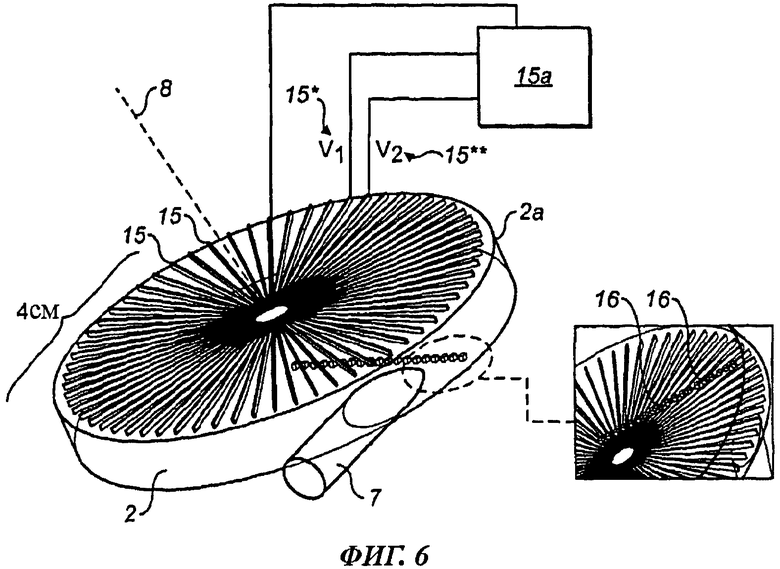
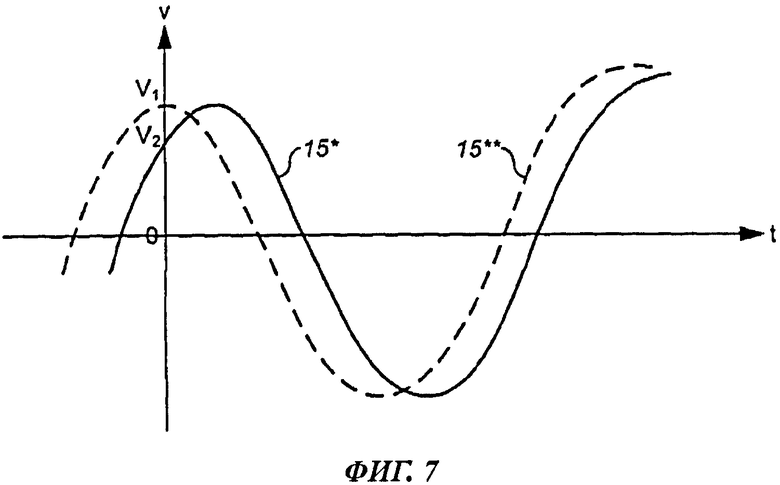
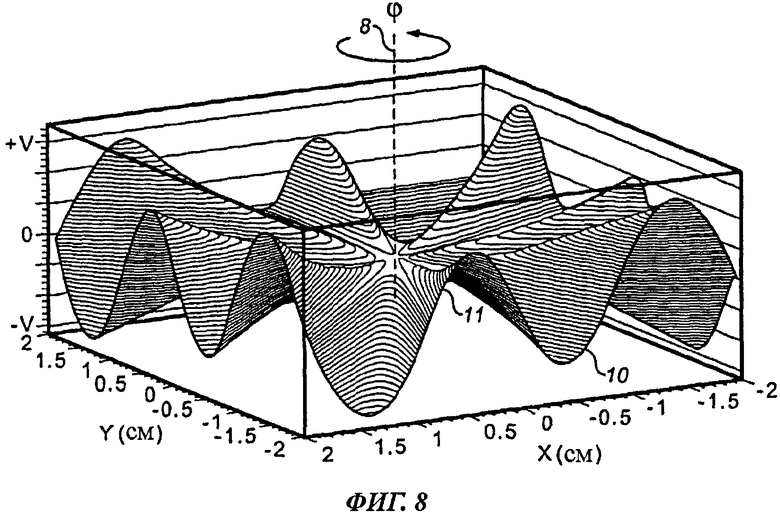
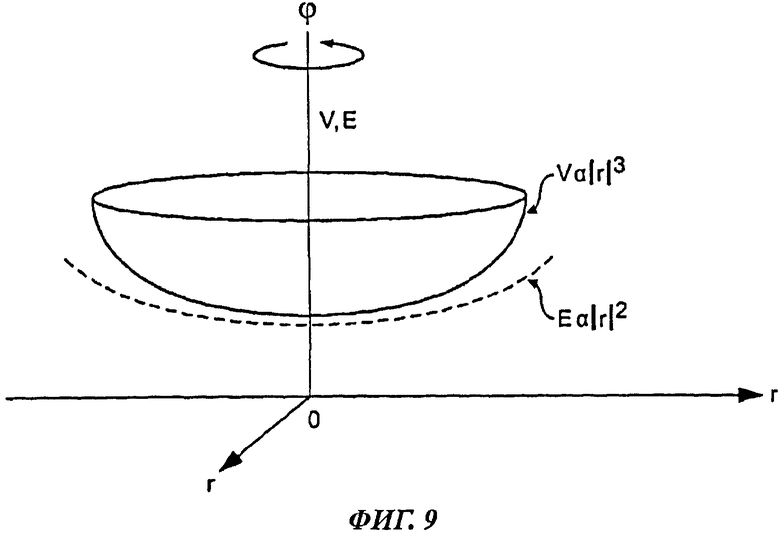
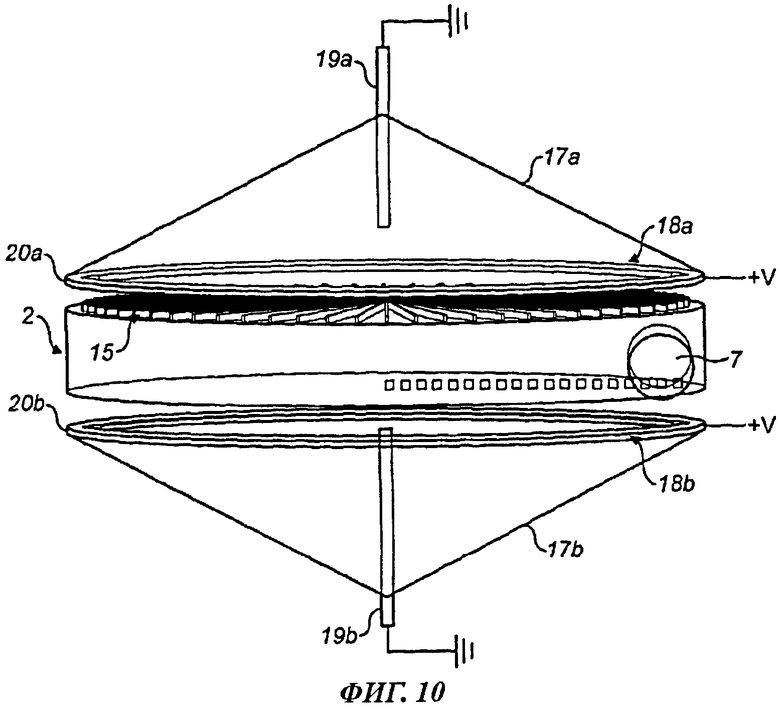
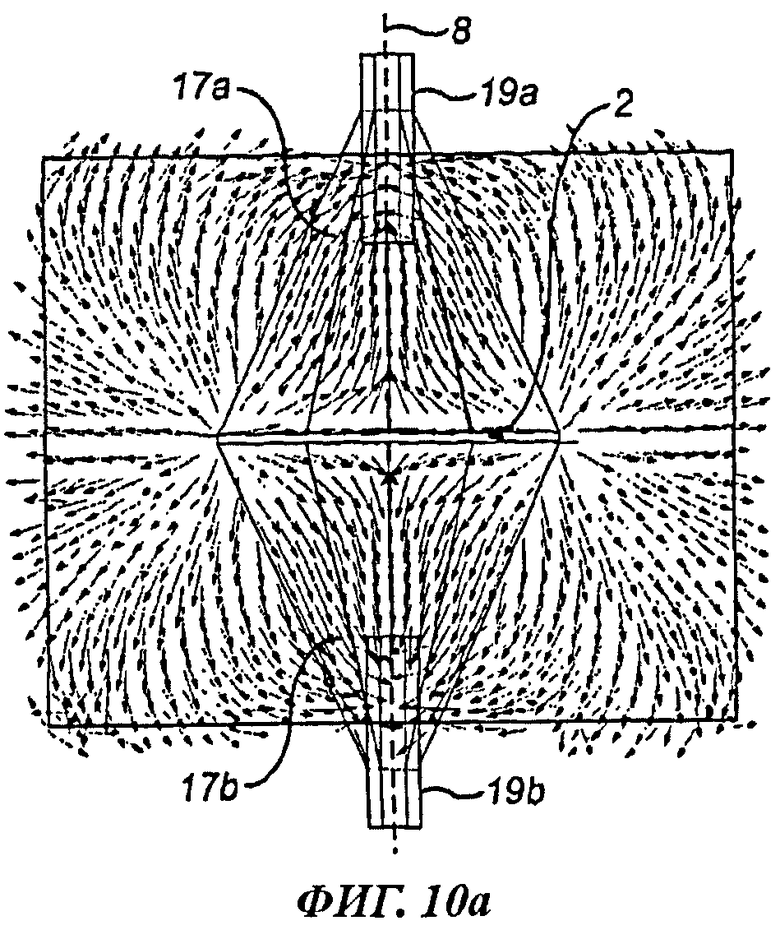
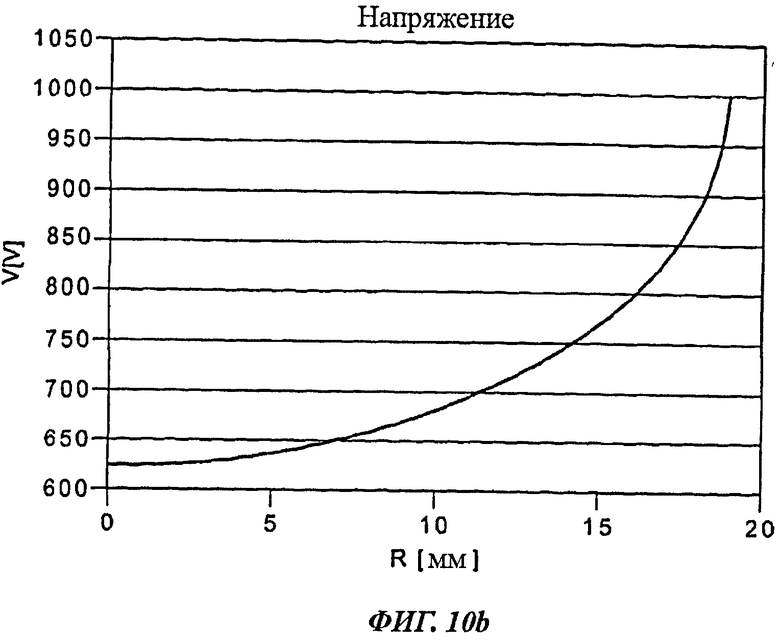
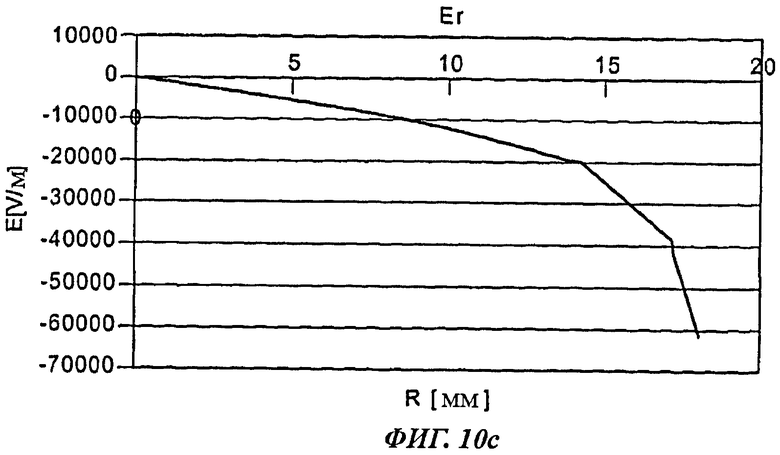
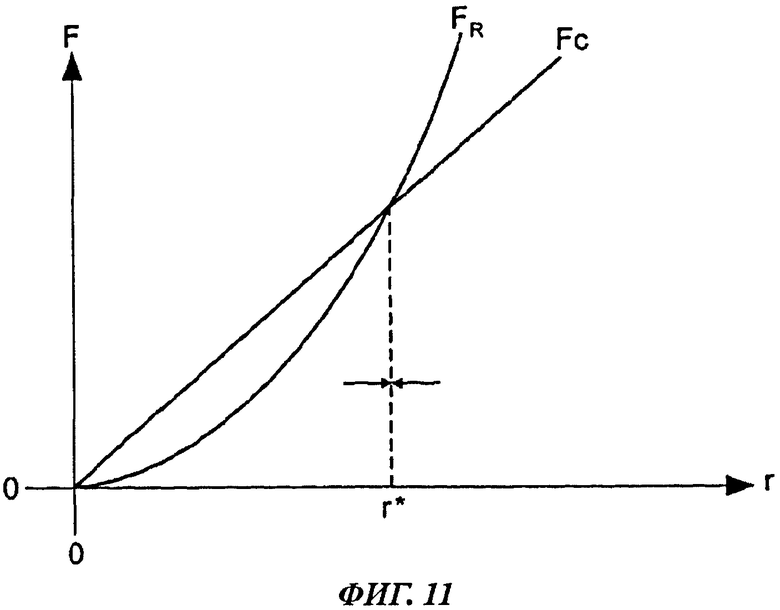
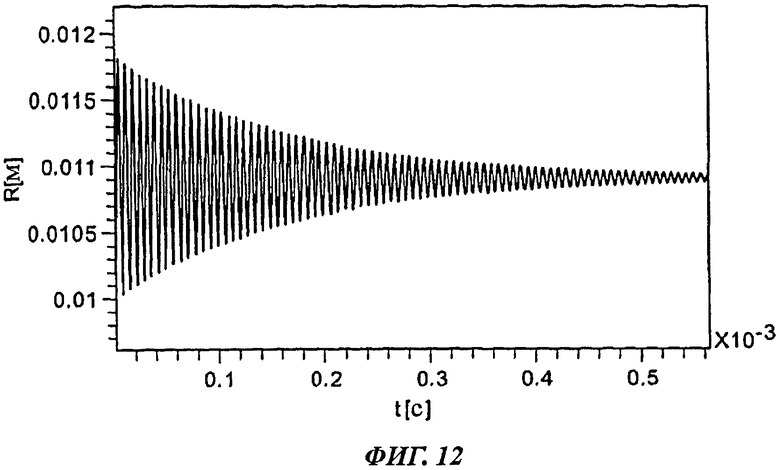
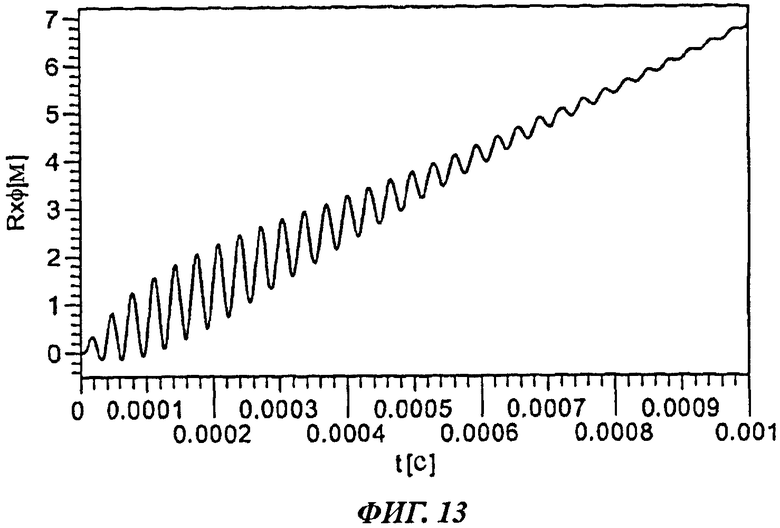
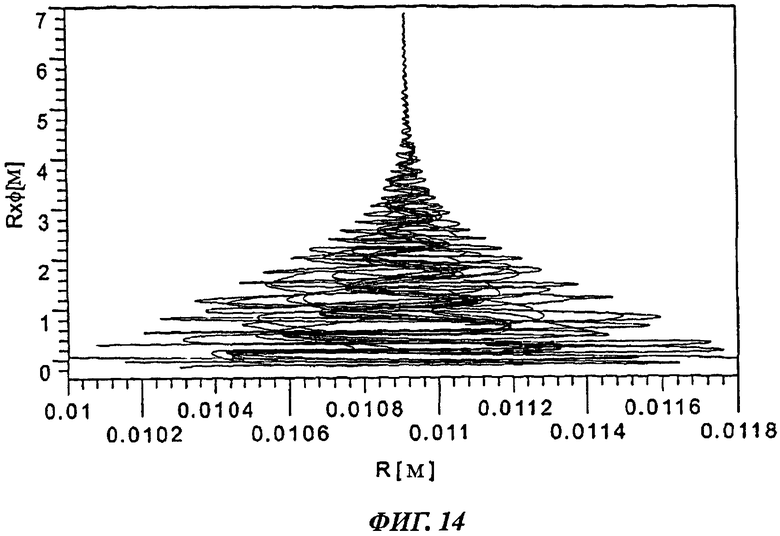
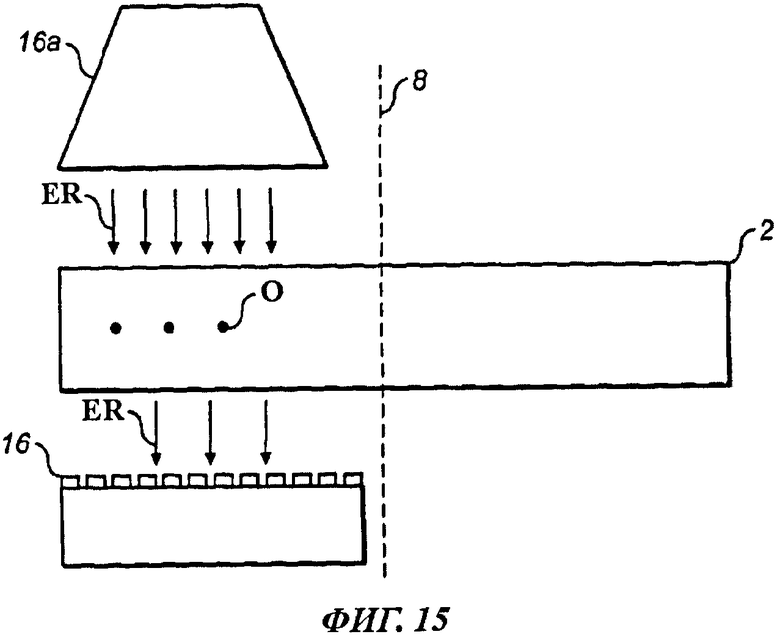
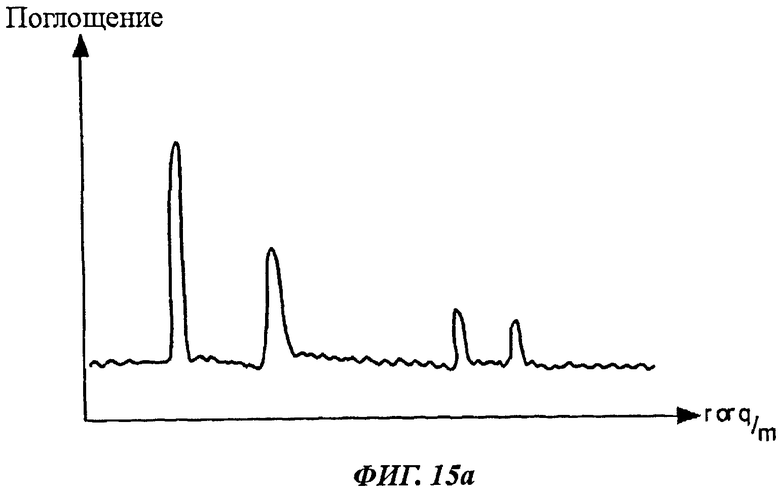
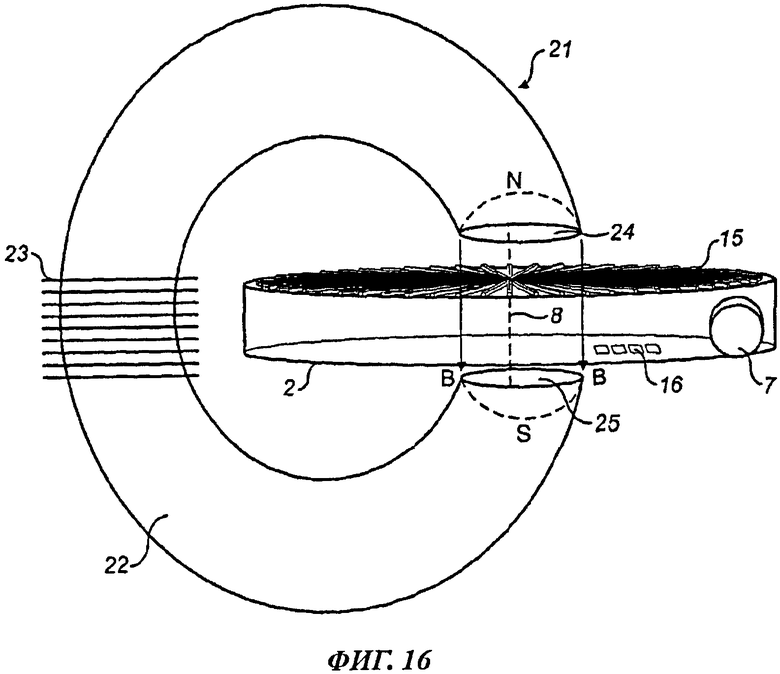
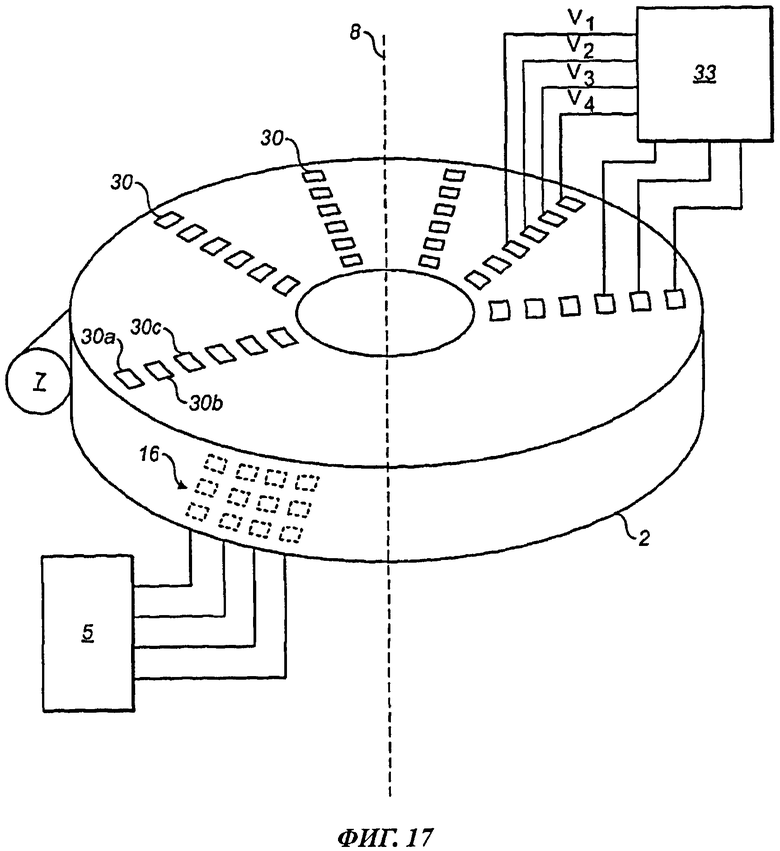
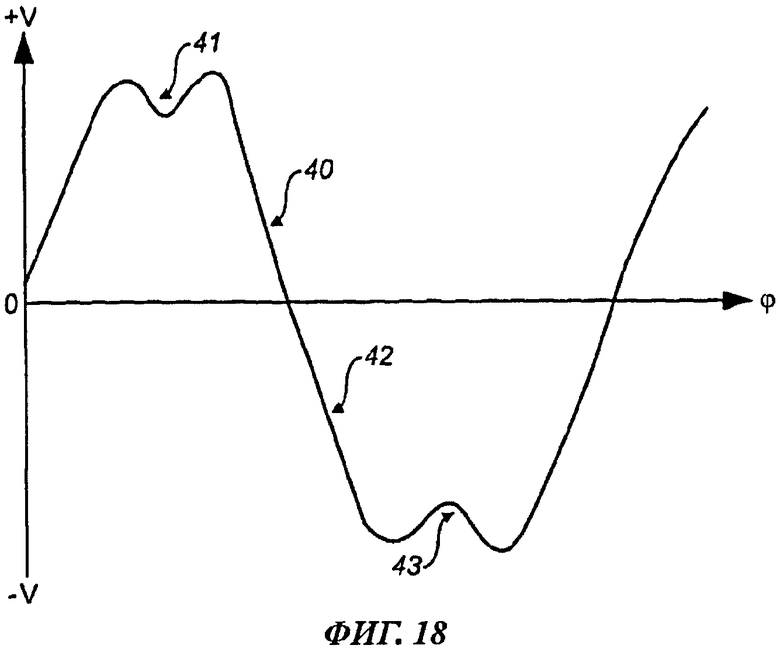
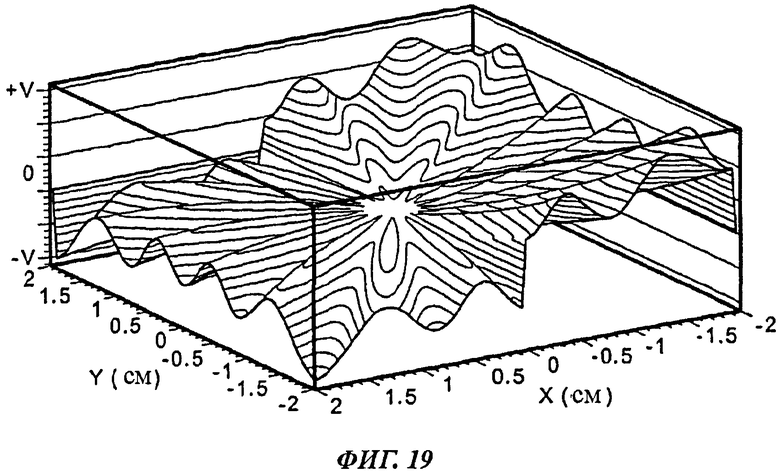
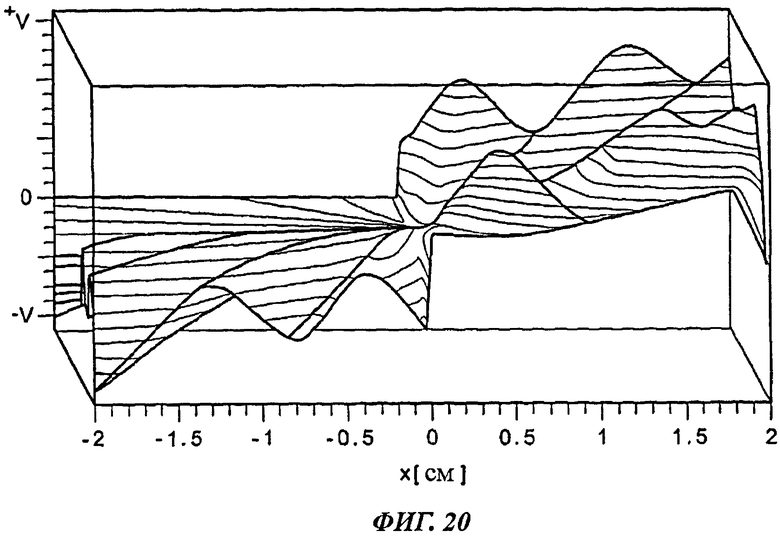
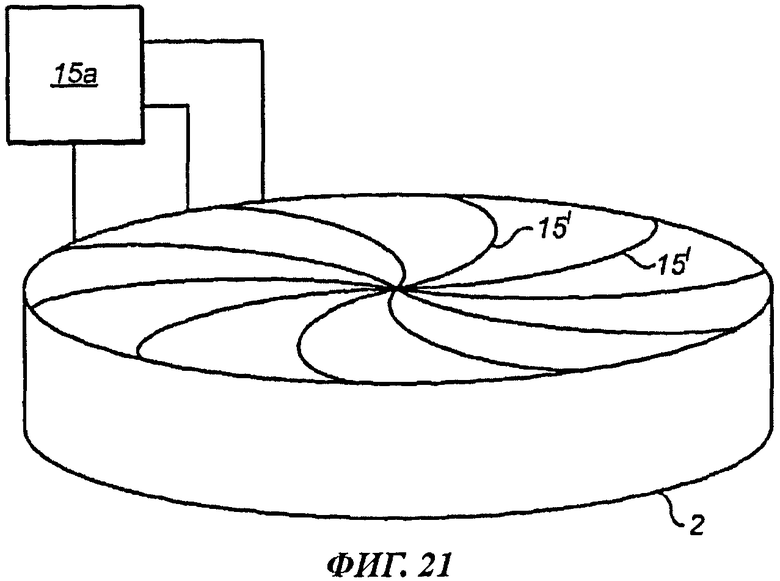
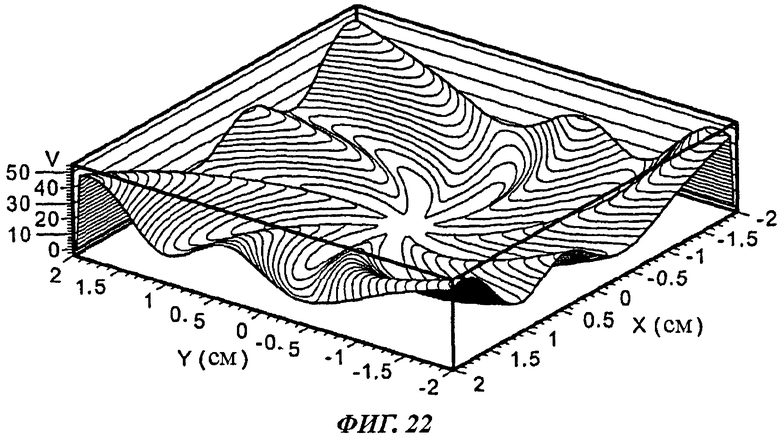
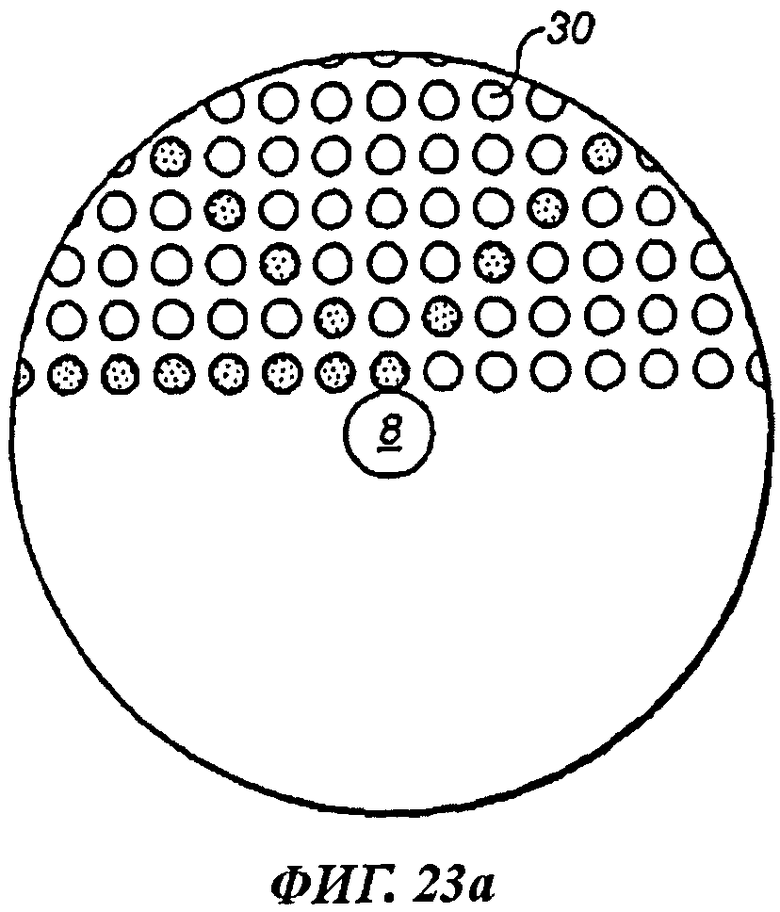
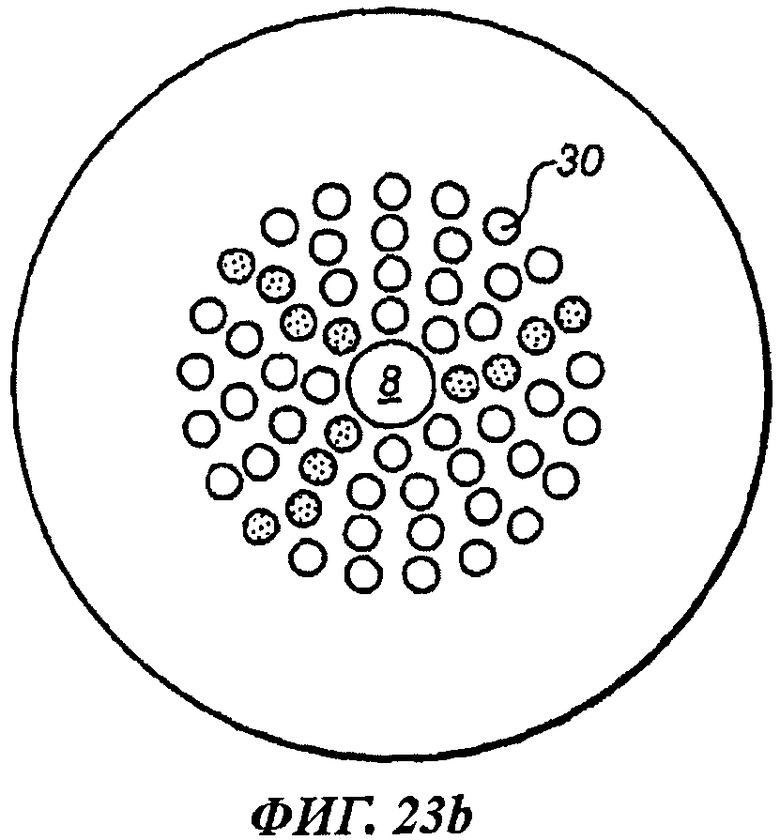
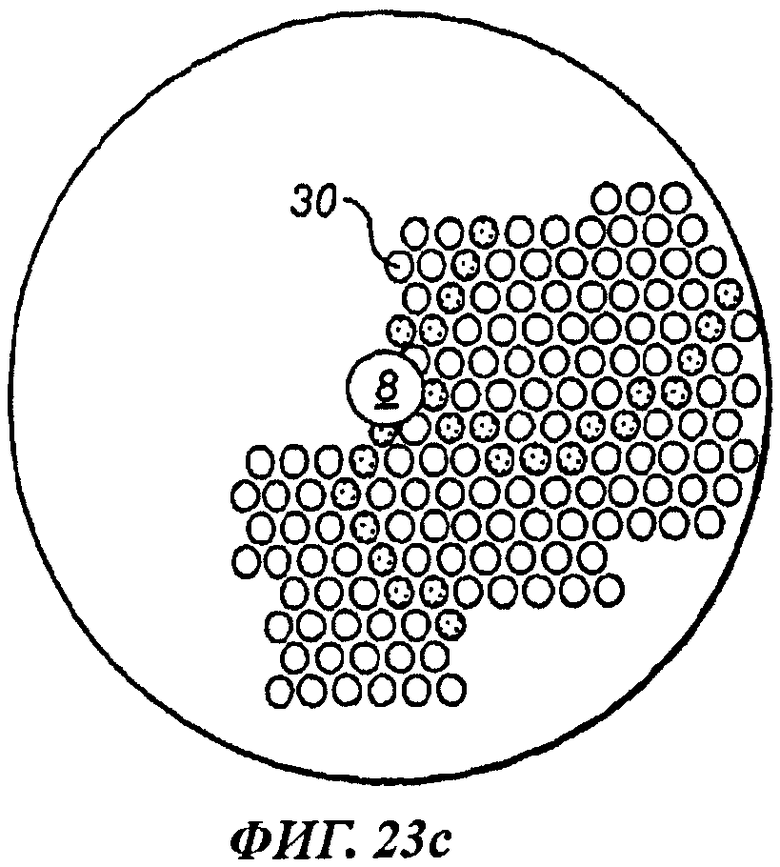
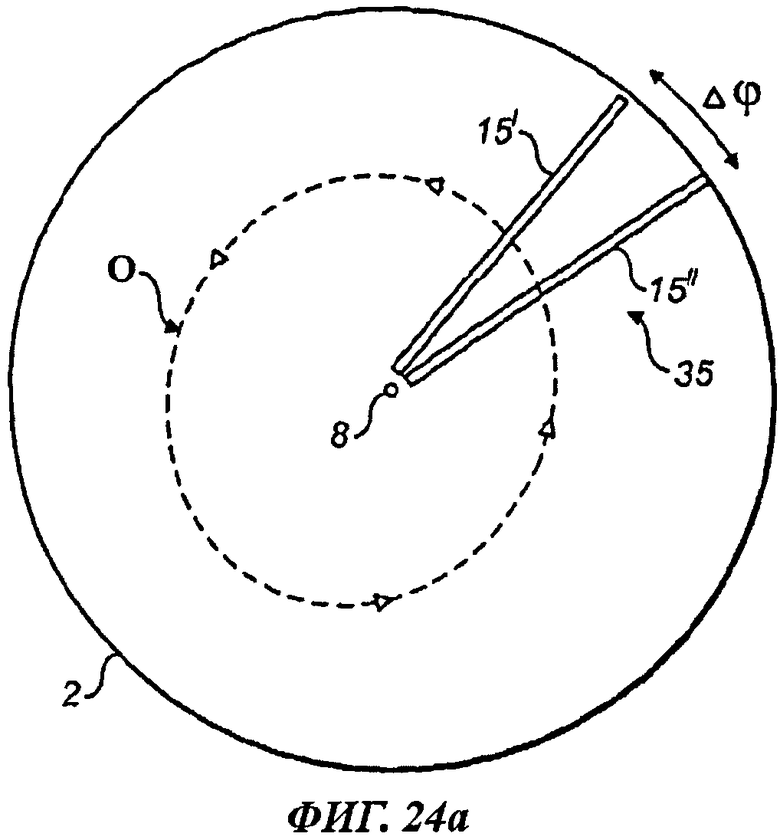
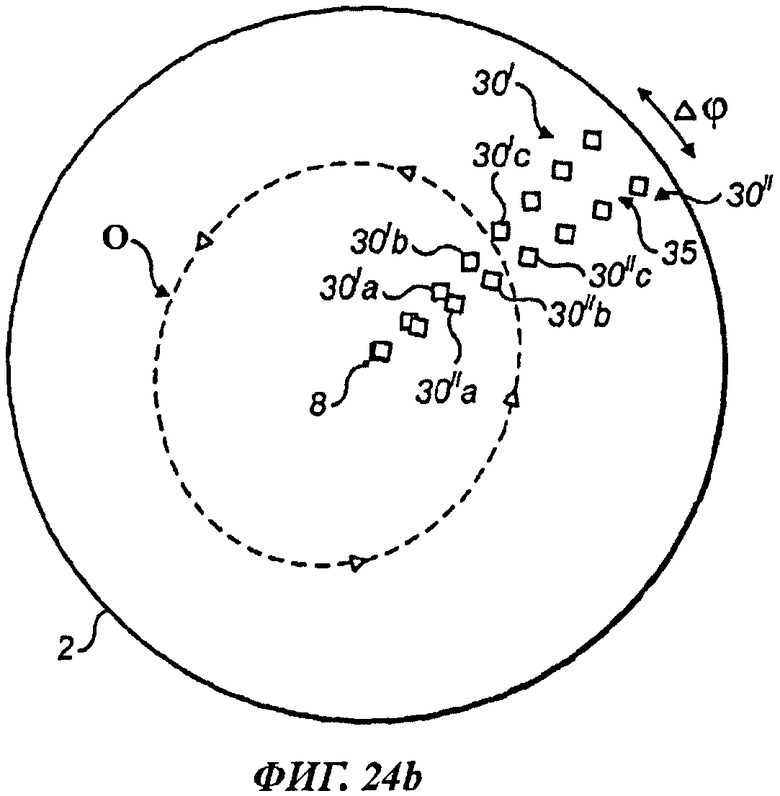
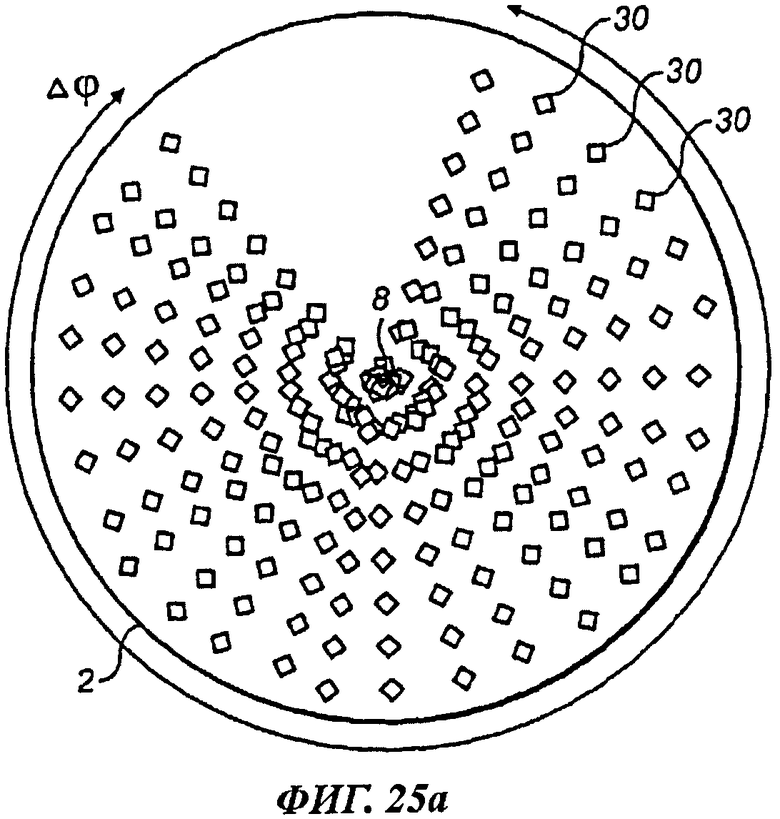
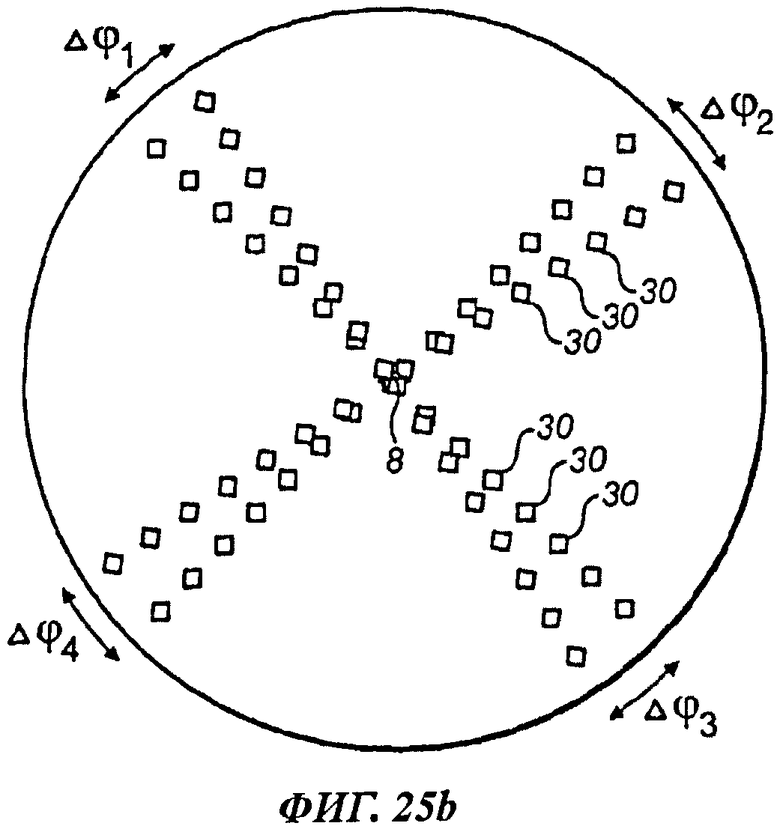
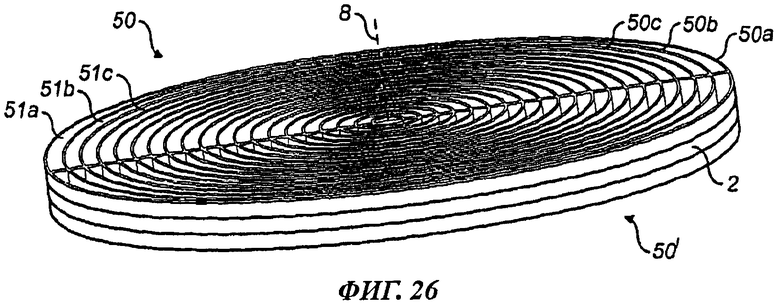
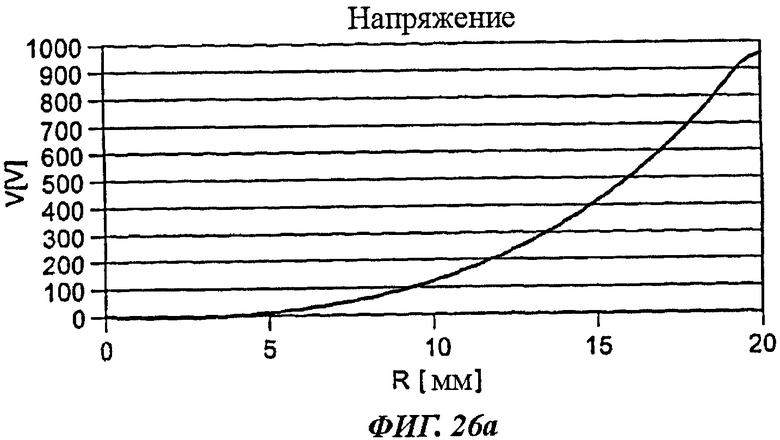
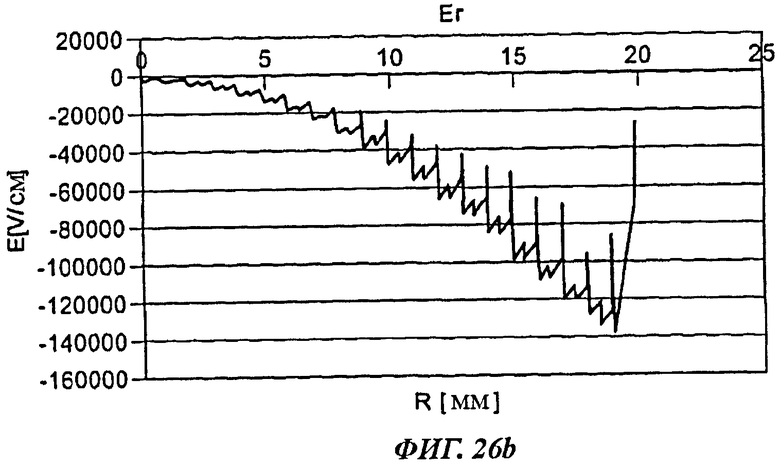
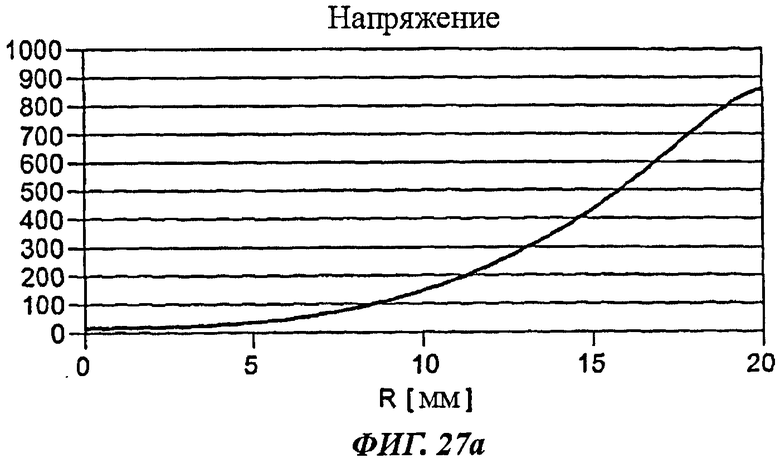
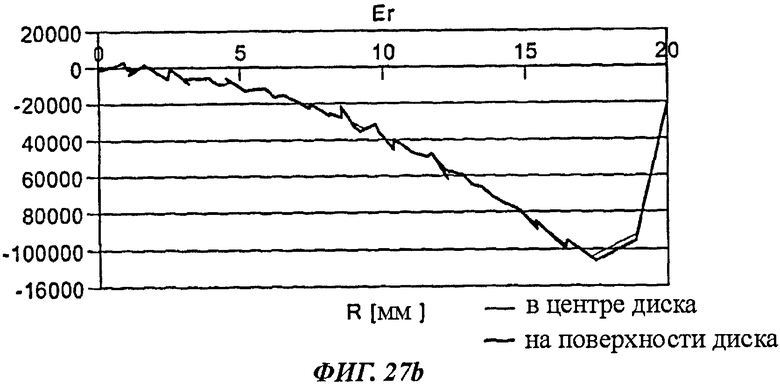
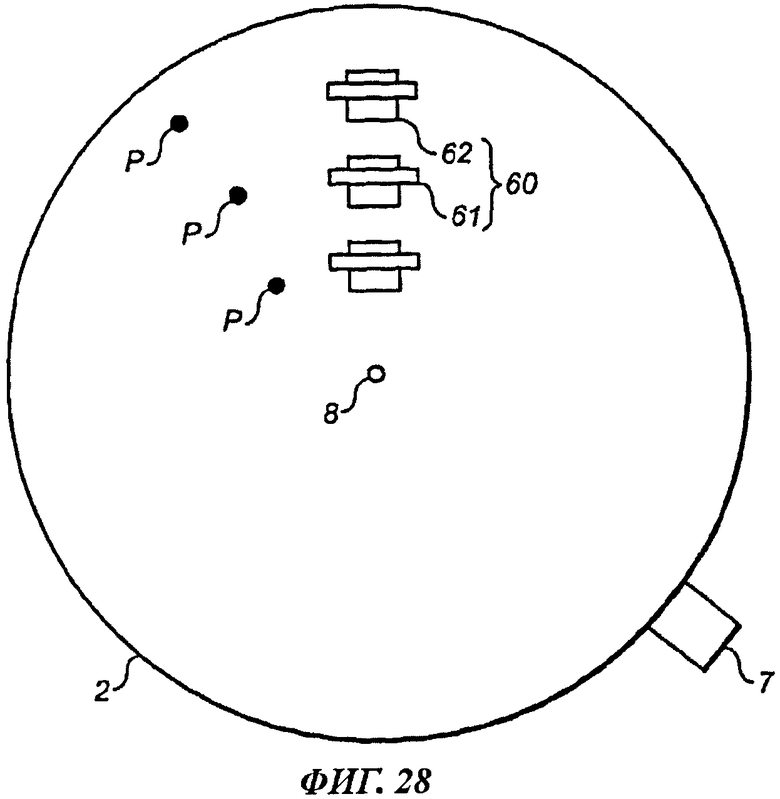
Изобретение относится к области анализа заряженных частиц. Масс-спектрометр содержит камеру, инжектор, способный инжектировать в камеру заряженные частицы, и генератор поля. Генератор поля выполнен с возможностью формирования по меньшей мере одного поля, действующего на заряженные частицы и имеющего улавливающий угловой компонент, сконфигурированный с возможностью образования между осью вращения и периферией камеры по меньшей мере одного канала, задаваемого энергетическими минимумами улавливающего углового компонента. Генератор поля выполнен с возможностью вращения улавливающего углового компонента вокруг оси вращения. Благодаря этому при использовании масс-спектрометра перемещение заряженных частиц ограничено посредством улавливающего углового компонента движением в угловом направлении внутри по меньшей мере одного канала вместе с указанным угловым компонентом, в результате чего на заряженные частицы действует центробежная сила. Созданное генератором поле дополнительно имеет уравновешивающий радиальный компонент, монотонно возрастающий по мере увеличения радиального расстояния от оси вращения по меньшей мере вблизи по меньшей мере одного канала. В результате при использовании масс-спектрометра заряженные частицы движутся по меньшей мере по одному каналу под совместным влиянием центробежной силы и уравновешивающего радиального компонента с формированием одной или более орбит в соответствии с отношениями зарядов частиц к их массам. Масс-спектрометр содержит также детектор, способный детектировать по меньшей мере одну из указанных орбит. Предложены также способы масс-спектрометрии. Технический результат - упрощение конструкции масс-спектрометра и расширение диапазона анализируемых частиц. 7 н. и 26 з.п. ф-лы, 28 ил.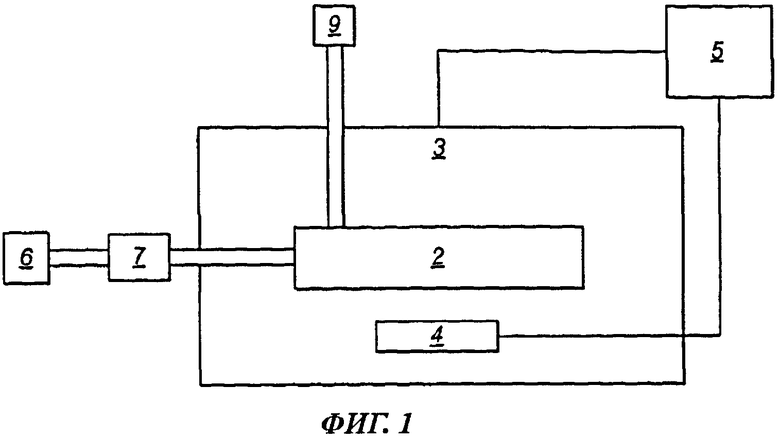
1. Масс-спектрометр, содержащий:
камеру;
инжектор, способный инжектировать в камеру заряженные частицы;
генератор поля, выполненный с возможностью формирования по меньшей мере одного поля, действующего на заряженные частицы и имеющего:
улавливающий угловой компонент, сконфигурированный с возможностью образования между осью вращения и периферией камеры по меньшей мере одного канала, задаваемого энергетическими минимумами улавливающего углового компонента, причем генератор поля дополнительно обеспечивает возможность вращения улавливающего углового компонента вокруг оси вращения, так что при использовании масс-спектрометра перемещение заряженных частиц ограничено посредством улавливающего углового компонента движением в угловом направлении внутри по меньшей мере одного канала для вращения вместе с указанным угловым компонентом, в результате чего на заряженные частицы действует центробежная сила;
и уравновешивающий радиальный компонент, монотонно возрастающий по мере увеличения радиального расстояния от оси вращения по меньшей мере вблизи по меньшей мере одного канала, так что при использовании масс-спектрометра заряженные частицы движутся по меньшей мере по одному каналу под совместным влиянием центробежной силы и уравновешивающего радиального компонента с формированием одной или более орбит в соответствии с отношениями зарядов частиц к их массам, и
детектор, способный детектировать по меньшей мере одну из указанных орбит.
2. Масс-спектрометр по п.1, отличающийся тем, что улавливающий угловой компонент образован улавливающим угловым полем, а уравновешивающий радиальный компонент образован уравновешивающим радиальным полем.
3. Масс-спектрометр по п.1, отличающийся тем, что улавливающий угловой компонент образован улавливающим угловым полем, а уравновешивающий радиальный компонент является компонентом улавливающего углового поля.
4. Масс-спектрометр по п.1, отличающийся тем, что энергетические минимумы соответствуют точкам, в которых угловой улавливающий компонент имеет, по существу, нулевую величину, предпочтительно точкам пересечения нулевых уровней, применительно к которым угловой улавливающий компонент имеет первое направление по одну сторону от точки пересечения нулевого уровня и второе, противоположное первому, направление по другую сторону от указанной точки.
5. Масс-спектрометр по п.1, отличающийся тем, что генератор поля выполнен с возможностью формирования улавливающего углового компонента только в угловой секции камеры, образованной вокруг оси вращения..
6. Масс-спектрометр по п.2 или 3, отличающийся тем, что улавливающее угловое поле является электрическим полем.
7. Масс-спектрометр по п.6, отличающийся тем, что генератор поля содержит электродный блок углового поля, содержащий множество улавливающих электродов или улавливающих электродных элементов и источник напряжения, выполненный с возможностью подавать напряжение по меньшей мере на некоторые улавливающие электроды или улавливающие электродные элементы.
8. Масс-спектрометр по п.7, отличающийся тем, что электродный блок углового поля содержит по меньшей мере два улавливающих электрода, расположенных между осью вращения и периферией камеры и предпочтительно равномерно распределенных в угловом направлении вокруг оси вращения.
9. Масс-спектрометр по п.7, отличающийся тем, что электродный блок углового поля содержит по меньшей мере два комплекта улавливающих электродных элементов, причем электродные элементы каждого комплекта расположены вдоль соответствующих линий, проходящих между осью вращения и периферией камеры, и предпочтительно равномерно распределены в угловом направлении вокруг оси вращения.
10. Масс-спектрометр по п.7, отличающийся тем, что электродный блок углового поля содержит двумерный комплект улавливающих электродных элементов, расположенных между осью вращения и периферией камеры, при этом улавливающие электродные элементы предпочтительно образуют паттерн ортогональной решетки или гексагональной решетки, или плотноупакованный паттерн, или паттерн в виде концентричных окружностей.
11. Масс-спектрометр по п.7, отличающийся тем, что единственный или каждый улавливающий электрод или улавливающий электродный элемент содержит резистивный полимер или кремний.
12. Масс-спектрометр по п.1, отличающийся тем, что уравновешивающий радиальный компонент имеет первое направление по меньшей мере в одном первом угловом секторе камеры и второе, противоположное первому, направление по меньшей мере в одном втором угловом секторе, при этом первый и второй угловые сектора соответствуют первому и второму каналам в зонах угловых минимумов.
13. Масс-спектрометр по п.2, отличающийся тем, что уравновешивающее радиальное поле является магнитным полем.
14. Масс-спектрометр по п.13, отличающийся тем, что генератор поля содержит магнитную систему, выполненную с возможностью установки камеры между ее противолежащими полюсами.
15. Масс-спектрометр по п.2, отличающийся тем, что уравновешивающее радиальное поле является электрическим полем.
16. Масс-спектрометр по п.15, отличающийся тем, что генератор поля содержит электродный блок радиального поля, содержащий по меньшей мере один уравновешивающий электрод, расположенный вблизи камеры и имеющий радиальный профиль, выбранный из условия обеспечения, при подаче на него напряжения, монотонно возрастающего радиального поля.
17. Масс-спектрометр по п.15, отличающийся тем, что генератор поля содержит электродный блок радиального поля, содержащий множество кольцевых электродов, расположенных концентрично оси вращения и отделенных друг от друга диэлектрическим материалом, а источник напряжения выполнен с возможностью подачи напряжения на каждый из кольцевых электродов.
18. Масс-спектрометр по п.12, отличающийся тем, что уравновешивающий радиальный компонент является компонентом улавливающего углового поля, причем электродный блок углового поля сконфигурирован таким образом, что напряжение на единственном или на каждом улавливающем электроде или на комплекте улавливающих электродных элементов изменяется от его конца, обращенного к оси вращения, к его концу, обращенному к периферии камеры, с формированием монотонно возрастающего радиального поля.
19. Масс-спектрометр по п.1, отличающийся тем, что детектор представляет собой:
детектор, выполненный с возможностью измерять радиус по меньшей мере одной из орбит, на которых находятся частицы;
детектор, выполненный с возможностью детектировать орбиту при одном или более заданных значений радиуса, или
детектор, содержащий коллектор, выполненный с возможностью собирать заряженные частицы с одной или более указанных орбит.
20. Способ масс-спектрометрии, включающий:
инжекцию заряженных частиц в камеру;
формирование по меньшей мере одного поля, действующего на заряженные частицы и имеющего улавливающий угловой компонент, сконфигурированный с возможностью образования между осью вращения и периферией камеры по меньшей мере одного канала, задаваемого энергетическими минимумами улавливающего углового компонента, и уравновешивающий радиальный компонент, монотонно возрастающий по мере увеличения радиального расстояния от оси вращения по меньшей мере вблизи по меньшей мере одного канала;
вращение улавливающего углового компонента вокруг оси вращения, в результате чего перемещение заряженных частиц ограничено посредством улавливающего углового компонента движением в угловом направлении внутри по меньшей мере одного канала вместе с указанным угловым компонентом, так что на заряженные частицы действует центробежная сила, причем заряженные частицы движутся по меньшей мере по одному каналу под совместным влиянием центробежной силы и уравновешивающего радиального компонента с формированием одной или более орбит в соответствии с отношениями зарядов частиц к их массам, и
детектирование по меньшей мере одной из указанных орбит.
21. Способ по п.20, отличающийся тем, что улавливающий угловой компонент образован улавливающим угловым полем, а уравновешивающий радиальный компонент образован уравновешивающим радиальным полем.
22. Способ по п.20, отличающийся тем, что улавливающий угловой компонент образован улавливающим угловым полем, а уравновешивающий радиальный компонент является компонентом улавливающего углового поля.
23. Способ по п.20, отличающийся тем, что улавливающий угловой компонент сформирован только в угловой секции камеры, образованной вокруг оси вращения.
24. Способ по п.20, отличающийся тем, что улавливающее угловое поле является электрическим полем.
25. Способ по п.21 или 22, отличающийся тем, что уравновешивающее радиальное поле является магнитным полем.
26. Способ по п.21 или 22, отличающийся тем, что уравновешивающее радиальное поле является электрическим полем.
27. Способ по п.20, отличающийся тем, что величину и/или профиль уравновешивающего радиального компонента варьируют в процессе движения заряженных частиц для настройки радиуса единственной или каждой орбиты, на которой находятся частицы.
28. Способ по п.20, отличающийся тем, что операция детектирования включает одну из следующих операций:
измерение радиуса по меньшей мере одной орбиты, на которой находятся частицы;
детектирование частиц при одном или более заданных значениях радиуса или
сбор частиц с одной или более указанных орбит.
29. Способ сортировки пробы, представляющей собой смесь заряженных частиц, включающий инжекцию указанной пробы в камеру и осуществление способа по п.20.
30. Способ измерения массы заряженной частицы, включающий инжекцию пробы, состоящей из заряженных частиц, в камеру, осуществление способа по п.20, в котором операция детектирования включает измерение радиуса по меньшей мере одной орбиты, и расчет массы частицы (частиц), основываясь по меньшей мере на одном измеренном радиусе.
31. Способ измерения массы заряженной частицы, включающий инжекцию пробы, состоящей из заряженных частиц, в камеру, осуществление способа по п.20, в котором операция детектирования включает детектирование частиц при одном или более заданных значениях радиуса, причем величину и/или профиль уравновешивающего радиального компонента варьируют в процессе движения заряженных частиц для настройки радиуса единственной или каждой орбиты, на которой находятся частицы, и расчет массы частицы (частиц), основываясь на варьировании уравновешивающего радиального компонента и заданном значении радиуса.
32. Способ детектирования целевой частицы, включающий инъекцию пробы, состоящей из частиц, в камеру, осуществление способа по п.20, в котором операция детектирования включает детектирование частиц при одном или более заданных значениях радиуса, причем по меньшей мере одно из заданных значений радиуса соответствует известной массе целевой частицы, и детектирование заряженных частиц по меньшей мере при одном заданном значении радиуса, указывающее на присутствие целевой частицы.
33. Способ экстрагирования целевой частицы из пробы, состоящей из смеси частиц, включающий инжекцию указанной пробы в камеру и осуществление способа по п.20, в котором операция детектирования включает сбор частиц с одной или более орбит, на которых находятся частицы, для экстрагирования частиц с выбранной орбиты, радиус которой определяют, основываясь на массе целевой частицы.
| СПОСОБ РАБОТЫ НАСОСНОЙ СИСТЕМЫ | 2006 |
|
RU2421632C2 |
| US 2003113926A1, 19.06.2003 | |||
| KOZLOV O S, Hyperfine Interactions, 20010101 Kluwer Academic Publishers, Do Часть:132,Стр.:451 - 456 | |||
| US 5565105A, 15.10.1996 | |||
| WO 2008132227A1, 06.11.2008 | |||
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ И АНАЛИЗА ИОНОВ АНАЛИТА | 2007 |
|
RU2346354C1 |

