Область техники, к которой относится изобретение
Область техники, к которой относится изобретение, - это область техники твердотельных лазерных гироскопов, используемых для измерения частот вращения или относительных угловых смещений. Относительное угловое смещение, выраженное в градусах, упоминается как интеграл частоты вращения упомянутого мобильного модуля как функции от времени. Этот тип оборудования используется чаще всего для аэронавигационных вариантов применения.
Лазерный гироскоп, созданный три десятилетия назад, активно продается и используется в настоящее время. Его принцип действия основан на эффекте Саньяка, который индуцирует разность частот Δυs между двумя так называемыми встречными модами оптического излучения, распространяющимися в противоположном направлении, двунаправленного кольцевого лазерного резонатора, которому придается вращательное движение. Классически разность частот Δυs задается посредством следующего уравнения:
где L и A - это, соответственно, длина волны и площадь резонатора; λ - это длина волны лазерного излучения без эффекта Саньяка; ω - это частота вращения блока.
Разность частот Δυs между двумя оптическими модами измеряется посредством спектрального анализа помех двух излучаемых лучей. Это позволяет выявлять значение ω с очень высокой точностью.
Уровень техники
Условием для наблюдения за помехами является устойчивость и относительное равенство сил света, излучаемых в двух направлениях. Априори этого непросто добиваться вследствие явления конкуренции между модами, которое означает, что одна из двух встречных мод может иметь тенденцию к тому, чтобы монополизировать доступное усиление за счет другой моды.
Эта проблема решена в твердотельных лазерных гироскопах за счет введения в резонатор оптических потерь, которые зависят от направления распространения оптической моды и ее силы света. Принцип заключается в том, чтобы модулировать эти потери посредством устройства с обратной связью как функцию от разности силы света между двумя излучаемыми модами, чтобы предпочитать более слабую моду за счет другой, с тем чтобы постоянно поддерживать равновесие между двумя встречными модами.
Заявка на патент FR 0303645, поданная заявителем, предлагает устройство стабилизатора для твердотельного лазерного гироскопа, которое состоит из системы с обратной связью, вызывающей оптические потери, которые зависят от направления распространения, причем они основаны на комбинации трех физических эффектов: взаимное вращение, невзаимное вращение и поляризация.
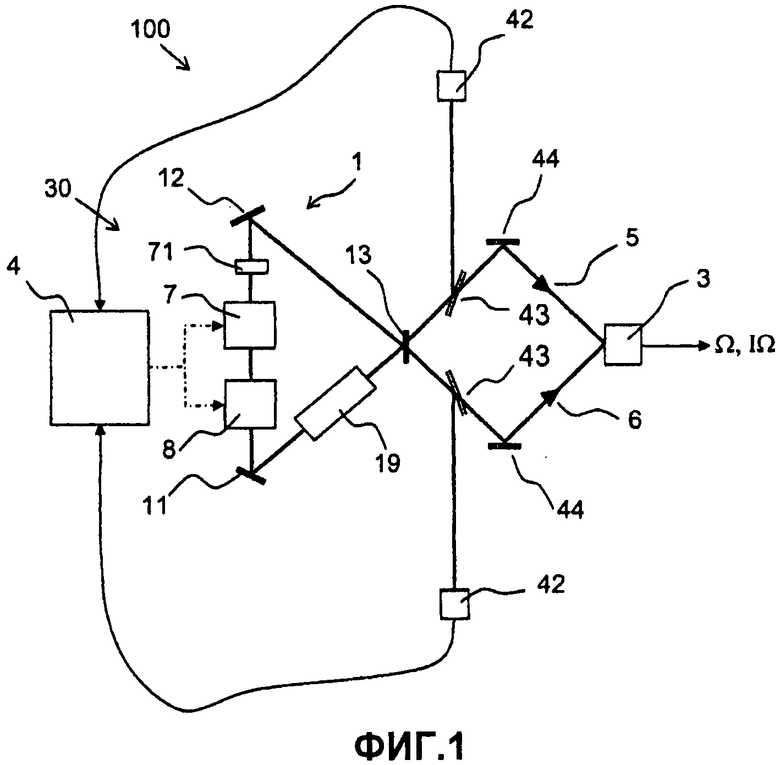
Фиг.1 представляет общую схему лазерного гироскопа 100 согласно предшествующему уровню техники. Он содержит кольцевой резонатор 1, состоящий, по меньшей мере, из трех зеркал 11, 12 и 13, среду 19 твердотельного усилителя и устройство 30 для стабилизации интенсивностей, содержащее поляризационный элемент 71, устройство 7 с взаимным воздействием, действующее на состояние поляризации встречных мод, и устройство 8 с невзаимным воздействием, также действующее на состояние поляризации встречных мод, причем, по меньшей мере, один из эффектов упомянутых устройств является управляемым. Блоки 71, 7 и 8 размещаются на путях встречных лучей. Лазерный гироскоп, имеющий среду 19 твердотельного усилителя, упоминается как твердотельный лазерный гироскоп.
В оптическом компоненте возникает невзаимный оптический эффект, когда свет имеет начальное состояние поляризации, и состояние поляризации света отличается от этого начального состояния после обратной транспортировки в упомянутом компоненте. Таким образом, этот луч, проходящий в противоположном направлении в невзаимном вращателе плоскости поляризации света, должен испытывать вращение своего направления поляризации в аналогичном смысле.
В оптическом компоненте возникает взаимный оптический эффект, когда свет имеет начальное состояние поляризации, и состояние поляризации света идентично этому начальному состоянию после обратной транспортировки в упомянутом компоненте.
На выходе резонатора, эти две оптические моды 5 и 6 вызываются посредством средства 44 наложения, чтобы предоставлять полезный сигнал Su, составляющий помехи двух встречных мод, частота которых Δυmes равна разности частот между двумя оптическими модами. Лазерный гироскоп также содержит средство для определения измерения вращения лазерного гироскопа 3. Измерение вращения лазерного гироскопа имеет намерение означать измерение величины, которая представляет вращение лазерного гироскопа. Это, например, измерение частоты вращения Ω лазерного гироскопа (выраженной в рад·с-1) или измерение относительного углового смещения IΩ лазерного гироскопа (соответствующего интегралу частоты вращения как функции от времени), выраженного в радианах. Это средство 3 измерения содержит, например, фотодиод, выполненный с возможностью измерять разность частот между двумя модами. Частота вращения Ω лазерного гироскопа 100 вычисляется из измеренной разности частот Δυmes на основе уравнения A.
В качестве разновидности, средство 3 содержит средство для измерения частоты и направления вращения из числа интерференционных полос (ассоциированного с разностью частот между двумя модами), проходящих в одном направлении и в другом. Это средство 3 имеет, например, два фотодиода, размещаемые в квадратуре относительно интерференционных полос сигнала помех.
Угловое смещение вычисляется посредством интегрирования измерения частоты вращения во времени.
При вычислении измерения вращения лазерного гироскопа в предшествующем уровне техники допускается, что разность частот между двумя встречными модами обусловлена исключительно вращением лазерного гироскопа (эффектом Саньяка).
Фракции этих лучей 5 и 6 дискретизируются посредством двух полуотражательных пластин 43 и отправляются в два фотодетектора 42. Сила света (интенсивность) лучей 5 и 6 также может быть измерена непосредственно на выходе резонатора посредством использования второго выходного разветвителя (при этом первый используется в этом случае только для того, чтобы измерять сигнал помех).
Сигналы, доставляемые посредством этих двух фотодетекторов, представляют силу света двух встречных мод 5 и 6. Сигналы отправляются в электронный модуль 4 с обратной связью, который возбуждает устройство с непостоянным эффектом как функцию от силы света принимаемых сигналов (пунктирные стрелки на схеме). Вместе с поляризационным устройством 71, это должно приводить к изменениям состояний поляризации двух встречных лучей. Эти изменения состояния поляризации тем самым приводят к различным оптическим потерям во встречных оптических модах 5 и 6. Если один из лучей имеет большую силу света, чем другой, то его сила света ослабляется в большей степени, чтобы возвращать выходные лучи к одинаковому уровню силы света. Двунаправленный режим тем самым стабилизируется по силе света, и устойчивое и сбалансированное двунаправленное излучение получается.
Недостатки предшествующего уровня техники
Основной недостаток предшествующего уровня техники состоит в наличии смещения при измерении вращения лазерного гироскопа, причем это смещение вызывается посредством устройства для стабилизации сил света.
Цель изобретения
Цель изобретения заключается в том, чтобы ограничивать это смещение.
Изобретение относится к твердотельному лазерному гироскопу, имеющему, по меньшей мере, один оптический резонатор, в котором две так называемые встречные оптические моды могут распространяться в противоположном направлении друг для друга, устройство для стабилизации сил света, позволяющее поддерживать равновесие двух встречных мод, имеющее, по меньшей мере, в резонаторе оптический блок, содержащий поляризационный элемент, устройство с невзаимным воздействием, действующее на состояния поляризации встречных мод, устройство со взаимным воздействием, также действующее на состояния поляризации встречных мод, устройство для стабилизации сил света, позволяющее, посредством установления команды управления, управлять, по меньшей мере, одним из эффектов упомянутого устройства со взаимным воздействием или устройства с невзаимным воздействием, причем упомянутый лазерный гироскоп дополнительно содержит средство для вычисления измерения вращения упомянутого лазерного гироскопа на основе так называемых встречных мод, имеющих разность частот между собой, средство для вычисления измерения вращения, вычисляющее измерение вращения при условии, что разность частот между двумя встречными модами вызывается только посредством вращения резонатора, дополнительно содержащему: средство для измерения команды управления, средство для сохранения модели изменения смещения частоты, вызванного посредством устройства для стабилизации сил света, как функции от команды управления, средство для вычисления смещения частоты, вызванного посредством устройства для стабилизации сил света на основе значения команды управления и модели, средство для вычисления смещения при измерении вращения, вызванного посредством смещения частоты, средство для компенсации смещения при измерении вращения.
Лазерный гироскоп согласно изобретению дополнительно может иметь одну из следующих характеристик, рассматриваемых вместе или отдельно:
- измерение вращения является измерением относительного углового смещения упомянутого лазерного гироскопа,
- измерение вращения является измерением частоты вращения упомянутого лазерного гироскопа,
- модель изменения смещения как функции от команды управления является линейной моделью,
- модель изменения смещения как функции от команды управления является таблицей, перечисляющей множество значений смещения частоты как функции от значения команды управления, причем она дополнительно содержит средство для измерения температуры, по меньшей мере, в одной точке в резонаторе,
- средство для измерения температуры выполнено с возможностью измерять температуру с ошибкой менее 5°C,
- модель дополнительно является функцией от температуры в одной или более точках в резонаторе,
- средство для измерения команды управления измеряет команду управления с относительной ошибкой менее или равной 10-4,
- средство для измерения команды управления является средством для измерения силы света,
- средство для измерения команды управления является средством для измерения напряжения.
Преимущества изобретения
Смещение, вызванное посредством устройства стабилизации, тем самым является ограниченным, и точность лазерного гироскопа, оснащенного системой для стабилизации сил света, вызывающей оптические потери, которые зависят от направления распространения, следовательно, повышается.
Принцип действия лазерного гироскопа
Лазерный гироскоп согласно изобретению основан на том факте, что перевод резонатора в режим вращения вызывает разность частот между двумя встречными модами, которая эквивалентна разности в длине пути между двумя модами. В частности, в лазере сдвиг фаз луча по пути, который он проходит в резонаторе, должен быть кратным 2n. Это ограничение выражается следующим образом:
где c - это скорость света, c/L - это свободный спектральный интервал FSI лазера и p - это целое число, которое является постоянным для данного лазера. L - это расстояние, проходимое лучом в резонаторе, причем это расстояние традиционно равно оптической длине резонатора.
Частота как частота луча является обратно пропорциональной длине, проходимой лучом в резонаторе, причем следующее соотношение удовлетворяется:
где
где ΔL - это изменение эффективной длины пути луча, и Δυ - это изменение частоты, вызываемое посредством этого изменения эффективной длины пути.
Теперь, в лазерном гироскопе эффект Саньяка вызывает разность частот Δυ между двумя встречными модами оптического излучения как заданную посредством уравнения A. Из этого может быть выведено то, что эффект Саньяка вызывает разность эффективной длины расстояния, проходимого в рамках резонатора, между двумя модами излучения в оптическом диапазоне, распространяющимися в противоположном направлении. Эта первая разность эффективной длины пути задается следующим образом на основе уравнений A и B:
где Δυs и ΔLs - это, соответственно, разность частот и разность эффективной длины пути, которые вызываются посредством эффекта Саньяка между двумя встречными модами.
Краткое описание чертежей
Изобретение должно пониматься более четко, и другие преимущества должны становиться очевидными при прочтении нижеследующего описания, приводимого без ограничений и с помощью прилагаемых чертежей, на которых:
Фиг.1 представляет лазерный гироскоп согласно предшествующему уровню техники,
Фиг.2 представляет общую схему лазерного гироскопа согласно изобретению,
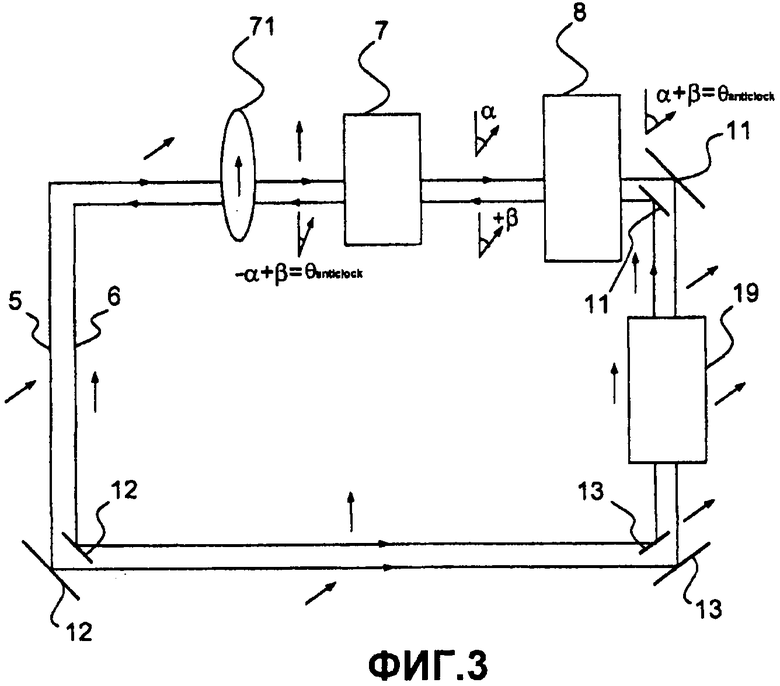
Фиг.3 представляет общий принцип устройства, позволяющего вызывать потери, которые зависят от направления распространения согласно изобретению.
Подробное описание изобретения
Лазерный гироскоп согласно изобретению представляется на фиг.2. Элементы, общие для фиг.1 и 2 (а также 3), обозначаются одинаковыми ссылками с номерами и не описываются многократно. Далее осуществлена попытка дать четкое описание, чтобы пояснять причину смещения, вызванного посредством устройства для стабилизации сил света, при выходном измерении лазерного гироскопа.
Принцип комбинирования взаимного оптического эффекта и невзаимного оптического эффекта проиллюстрирован в примере по фиг.3 для случая, в котором взаимные и невзаимные эффекты являются просто вращениями линейной поляризации. Схема на этом чертеже представляет кольцевой резонатор, в котором могут распространяться два встречных оптических луча 5 и 6. Для понятности, пути, проходимые посредством двух лучей 5 и 6, отделены, даже когда они проходят вдоль одного пути в противоположном направлении. Внешний контур, в котором направление пути представляется посредством первых стрелок, представляет путь, проходимый посредством первого луча 5, а внутренний контур, в котором направление пути представляется посредством стрелок, указывающих в противоположном первым стрелкам направлении, представляет путь, проходимый посредством второго луча 6. Поляризация лучей на соответствующих путях также представлена посредством векторов. Этот резонатор, помимо прочего, имеет оптический блок, состоящий из линейного поляризатора 71, устройства (первого элемента) 7 со взаимным воздействием, действующего на направление поляризации линейно поляризованного света, и устройства (второго элемента) 8 с невзаимным воздействием, также действующего на направление поляризации света. Первый элемент 7 вращает поляризацию света на угол α в направлении по часовой стрелке, второй элемент 8 вращает поляризацию на угол β также в направлении по часовой стрелке. Что касается первого оптического луча 5, линейно поляризованного посредством линейного поляризатора 71 и проходящего последовательно через первый и второй элементы, после прохождения через первый элемент его направление поляризации повернуто на угол α, а после прохождения через второй элемент его направление поляризации повернуто на угол θclock, равный α+β.
Что касается второго оптического луча 6, линейно поляризованного и проходящего последовательно в противоположном направлении к первому лучу 5 через второй элемент, а затем первый элемент, после прохождения через второй элемент его направление поляризации повернуто на угол β, а после прохождения через первый элемент его направление поляризации повернуто на угол θanticlock, равный -α+β.
Побочный эффект устройства для стабилизации сил света состоит в том, что оно приводит к небольшому разносу состояний поляризации двух встречных мод в части пути, который они проходят в резонаторе, результатом чего является то, чтобы делать их чувствительными к двойному лучепреломлению резонатора. Двойное лучепреломление резонатора, например, обусловлено наличием двоякопреломляющих материалов, таких как среда 19 усиления. Среда 19 усиления является двоякопреломляющей, если она содержит, например, остаточные механические или термические напряжения, которые делают материал анизотропным.
Двойное лучепреломление резонатора дополнительно может являться следствием наличия неидеальных зеркал 11, 12, 13, т.е. зеркал, которые вызывают сдвиг фаз между двумя падающими лучами, поляризации которых имеют различные соответствующие ориентации относительно плоскости s (плоскости, перпендикулярной плоскости падения). Лучи в таком случае демонстрируют различный показатель преломления, когда они имеют различную поляризацию.
В двоякопреломляющем материале показатель преломления не является уникальным, а зависит от направлений распространения и поляризации светового луча. Известно, что когда оптический луч проходит через преломляющий материал длины d с индексом n, все происходит так, как если оптический луч проходит эффективную длину deff, удовлетворяющую следующему:
deff=n*d
Если два оптических луча имеют различное направление поляризации, когда они проходят через или отражаются посредством двоякопреломляющего материала, они демонстрируют различный показатель преломления и, следовательно, проходят различную эффективную длину.
С учетом того, что в резонаторе лазерного гироскопа согласно изобретению поляризация встречных лучей является различной в рамках резонатора, а именно в зеркалах 11, 12, 13 и среде 19 усиления, следует понимать, что двойное лучепреломление в лазерном резонаторе вызывает вторую эффективную разность длины распространения ΔLb между встречными оптическими лучами (при этом первая обусловлена эффектом Саньяка), когда лазерный гироскоп оснащен устройством 30 для стабилизации сил света.
Теперь, согласно уравнению B, вторая эффективная разность длины распространения двух оптических лучей вызывает вторую разность частот между двумя лучами, удовлетворяющую следующему:
где Δνb - это вторая разность частот между встречными оптическими лучами, а именно смещение частоты, вызываемое посредством двойного лучепреломления резонатора.
Следовательно, когда разность частот Δυmes между двумя встречными лучами измеряется с помощью средства 3, она является суммой разности частот, вызываемой посредством двоякопреломляющих материалов, и разности частот, вызываемой посредством эффекта Саньяка.

Если измерение вращения лазерного гироскопа получается посредством непосредственного вычисления частоты вращения Ω лазерного гироскопа из измеренной разности частот и уравнения A, то вычисленная частота вращения смещается вследствие двойного лучепреломления резонатора.
Относительное угловое смещение IΩ, вычисляемое на основе подсчета интерференционных полос, тем самым также имеет сдвиг углового смещения ΔIΩb, вызванного посредством смещения частоты, которое вызывается посредством устройства 30 для стабилизации сил света. Дополнительно, смещение частоты Δυb варьируется как функция от тока, подаваемого посредством устройства с обратной связью, чтобы стабилизировать силы света встречных мод. Следовательно, это смещение является существенным источником снижения производительности твердотельного лазера предшествующего уровня техники при измерениях вращения, выполненных с помощью лазерного гироскопа.
Чтобы повышать производительность твердотельных лазерных гироскопов, лазерный гироскоп согласно изобретению содержит устройство 40 для компенсации смещения, вызванного посредством устройства 30 компенсации силы света. Это устройство является устройством для компенсации смещения, вызванного посредством двойного лучепреломления резонатора, обусловленного наличием устройства для стабилизации сил света. Таким образом, это устройство содержит средство 25 для компенсации смещения, вызванного посредством двойного лучепреломления резонатора при измерении вращения, выполненного посредством средства 3.
Заявитель обнаружил, что смещение частоты Δυb, вызываемое посредством устройства компенсации, зависит от команды Co управления, отправленной посредством электронного модуля 4 с обратной связью в устройство с непостоянным эффектом.
Устройство с непостоянным эффектом является либо устройством 8 с невзаимным воздействием, либо устройством 7 со взаимным воздействием. Чтобы формировать устройство с переменным взаимным воздействием, одно возможное решение состоит в использовании устройства, имеющего двойное лучепреломление, которое может управляться посредством команды управления напряжением. Команда, формируемая посредством электронного модуля с обратной связью, является командой управления напряжением, которая зависит от разности силы света между двумя встречными модами.
Чтобы формировать устройство с переменным невзаимным воздействием, одно решение состоит в использовании магнитооптических устройств, например, с эффектом Фарадея, которые требуют магнитного поля для работы, и в изменении магнитного поля, например, посредством индукционной катушки, окружающей материал с эффектом Фарадея. Электронный модуль с обратной связью устанавливает команду управления током в зависимости от разности силы света между встречными лучами.
Когда устройство с непостоянным эффектом является устройством с невзаимным воздействием, средство 23 для измерения команды управления является средством для измерения тока. Средство для измерения тока предпочтительно измеряет ток с ошибкой в относительном значении менее или равной 10-4. Ошибка в относительном значении равна ошибке измерения, деленной на измеренное значение. Такое измерение выполняется с помощью традиционного средства для измерения силы света, например с помощью средства для измерения напряжения через контактные выводы известного сопротивления. Таким образом, измеряемый сигнал может быть аналоговым или цифровым.
Когда устройство с непостоянным эффектом является устройством со взаимным воздействием, средство 23 для измерения команды управления является средством для измерения напряжения. Средство для измерения напряжения предпочтительно измеряет напряжение с ошибкой в относительном значении менее или равной 10-4. Традиционное средство для измерения напряжения, типа вольтметра, дает возможность достижения этого типа с точностью.
В частности, лазерный гироскоп упоминается как "высокопроизводительный лазерный гироскоп", когда уход смещения, существующего при измерении углового смещения лазерного гироскопа, менее или равен 1/100 градусов в час. При компенсации смещения, уход более чем в 1/100 градусов в час не должен происходить. С этой целью, измерение команды управления должно иметь относительную ошибку менее или равной 10-4.
Далее подробнее описывается устройство 40 для компенсации смещения, вызванного посредством устройства стабилизатора в твердотельном лазерном гироскопе согласно изобретению.
Это устройство содержит средство 21 для сохранения модели Mo изменения смещения частоты Δυb, вызванного посредством устройства для стабилизации сил света, как функции от команды Co управления. Дополнительно, лазерный гироскоп содержит средство 22 для вычисления смещения частоты Δυb, вызванного посредством устройства для стабилизации сил света на основе команды Co управления и модели Mo, средство 24 для вычисления смещения, вызванного при измерении вращения, выполненного посредством средства 3, и средство 25 для компенсации смещения, вызванного посредством двойного лучепреломления резонатора, так что выходное измерение Ωs или IΩs лазерного гироскопа является измерением вращения лазерного гироскопа, в котором смещение, вызываемое посредством устройства для компенсации частот, скорректировано. Средство 22 для вычисления смещения частоты, вызванного посредством устройства для стабилизации сил света, вычисляет смещение частоты Δυb на основе значения команды Co управления, измеренной посредством средства 23 для измерения команды Co управления, и модели Mo изменения смещения как функции от команды Co управления.
Модель Mo состоит, например, из таблицы, перечисляющей значение смещения для множества значений команды Co управления. В качестве разновидности, модель соответствует модели, установленной на основе таблиц, при аппроксимации характера изменения смещения как функции от команды управления. Например, модель изменения смещения может быть линейной моделью.
Таблица, соответствующая модели Mo изменения смещения частоты, устанавливается на заводе посредством традиционной технологии калибровки.
На основе смещения частоты средство 24 вычисляет смещение ΔΩb или ΔIΩb при измерении вращения лазерного гироскопа.
В примере, в котором средство 3 для вычисления измерения вращения вычисляет измерение угловой скорости Ω, средство 24 преобразует это смещение частоты Δυb в смещение угловой скорости ΔΩb на основе уравнения A.
В примере измерения вращения как относительного углового смещения IΩ, измерение смещения угловой скорости ΔΩb дополнительно интегрируется как функция от времени, чтобы предоставлять сдвиг углового смещения ΔIΩb.
В качестве неограничивающих примеров, с типичным значением 0,1 миллирадиан для разноса поляризации и типичного сдвига фаз порядка 1 градуса между плоскостями s и p зеркала, смещение частоты вращения имеет порядок 100 градусов/час.
Средство 25 для компенсации смещения, вызванного посредством устройства для стабилизации сил света, вычитает смещение при измерении вращения как частоту вращения ΔΩb или как относительное угловое смещение ΔIΩb, соответственно, из измерения частоты вращения Ω или относительного углового смещения IΩ, соответственно, чтобы получать измерение выходного вращения S, которое является компенсированной частотой вращения Ωs или компенсированным относительным угловым смещением IΩs, соответственно.
Блок, формируемый посредством средств 3, 21, 22, 23, 24 и 25, является средством для вычисления измерения выходного вращения лазерного гироскопа на основе встречных мод. Это измерение выходного вращения представляет компенсированное измерение вращения, т.е. измерение, при котором, по меньшей мере, часть смещения, вызванного посредством устройства для стабилизации сил света, корректируется.
В предпочтительном варианте осуществления изобретения, модель коррекции для смещения, вызванного посредством устройства для стабилизации сил света, уточняется при помощи одного или более датчиков температуры, размещаемых в лазерном резонаторе. Изменение температуры резонатора может, например, вызывать расширение или сжатие используемого материала Фарадея, тем самым изменяя значение невзаимного вращения и поэтому смещения.
С этой целью, лазерный гироскоп согласно изобретению содержит средство для измерения температуры в одной или более точках в резонаторе, содержащее одно или более средств для измерения температуры в соответствующих точках в резонаторе. Модель изменения смещения частоты как функции от команды управления дополнительно является функцией от температуры резонатора.
Предпочтительно, средство для измерения температуры измеряет температуру с ошибкой менее 5°C. Традиционные датчики температуры допускают предоставление такой точности. Такие датчики обычно используются в инерциальных навигационных устройствах (чаще всего в газовых лазерных гироскопах). Таким образом, так называемый "высокопроизводительный" твердотельный лазерный гироскоп может предоставляться.
Инерционная производительность твердотельного лазерного гироскопа, оснащенного устройством для стабилизации сил света с использованием устройства с эффектом взаимного вращения, устройства с эффектом невзаимного вращения и поляризатора, тем самым повышается.
Средство вычисления, описанное в заявке на патент, является, например, цифровым средством вычисления программного типа или аппаратного типа.
Предложенное изобретение относится к твердотельным лазерным гироскопам, в которых производится коррекция параметров встречных лазерных лучей. Предложенный твердотельный лазерный гироскоп содержит устройство для стабилизации сил света, позволяющее поддерживать равновесие двух встречных мод, имеющее средство для вычисления измерения вращения, резонатор, средство для измерения команды управления, средство для сохранения модели изменения смещения частоты, вызванного посредством устройства для стабилизации сил света, как функции от команды управления, средство для вычисления смещения частоты, вызванного посредством устройства для стабилизации сил света на основе значения команды управления и модели, средство для вычисления смещения при измерении вращения, вызванного посредством смещения частоты, средство для компенсации смещения при измерении вращения. Предложенный лазерный гироскоп позволяет устранить смещение в ходе лазерных лучей, связанное с двойным лучепреломлением в оптическом резонаторе. 10 з.п. ф-лы, 3 ил.
1. Твердотельный лазерный гироскоп (100), имеющий, по меньшей мере, один оптический резонатор (1), в котором две так называемые встречные оптические моды (5, 6) могут распространяться в противоположном направлении друг для друга, устройство (30) для стабилизации сил света, позволяющее поддерживать равновесие двух встречных мод, имеющее, по меньшей мере, в резонаторе оптический блок, содержащий поляризационный элемент (71), устройство (8) с невзаимным воздействием, действующее на состояния поляризации встречных мод, устройство (7) с взаимным воздействием, также действующее на состояния поляризации встречных мод, устройство (30) для стабилизации сил света, имеющее средство (4) управления, позволяющее, посредством установления команды (Со) управления, управлять, по меньшей мере, одним из эффектов упомянутого устройства (7) со взаимным воздействием или устройства (8) с невзаимным воздействием, причем упомянутый лазерный гироскоп дополнительно содержит средство (3) для вычисления измерения вращения (Ω, IΩ) упомянутого лазерного гироскопа на основе так называемых встречных мод, имеющих разность частот (Δνmes) между собой, средство (3) для вычисления измерения вращения (Ω, IΩ), вычисляющее измерение вращения (Ω, IΩ) при условии, что разность частот (Δνmes) между двумя встречными модами вызывается только посредством вращения резонатора, отличающийся тем, что дополнительно содержит:
- средство (23) для измерения команды (Со) управления,
- средство (21) для сохранения модели (Мо) изменения смещения частоты (Δνb), вызванного посредством устройства для стабилизации сил света, как функции от команды (Со) управления,
- средство (22) для вычисления смещения частоты (Δνb), вызванного посредством устройства (30) для стабилизации сил света на основе значения команды (Со) управления и модели (Мо),
- средство (24) для вычисления смещения (ΔΩb, ΔIΩb) при измерении вращения (Ω, IΩ), вызванного посредством смещения частоты (Δνb),
- средство (25) для компенсации смещения (ΔΩb, ΔIΩb) при измерении вращения (Ω, IΩ).
2. Твердотельный лазерный гироскоп (100) по п.1, отличающийся тем, что измерение вращения является измерением относительного углового смещения упомянутого лазерного гироскопа.
3. Твердотельный лазерный гироскоп (100) по п.1, отличающийся тем, что измерение вращения является измерением частоты вращения (Ω) упомянутого лазерного гироскопа.
4. Твердотельный лазерный гироскоп (100) по п.1, отличающийся тем, что модель (Мо) изменения смещения как функции от команды (Со) управления является линейной моделью.
5. Твердотельный лазерный гироскоп (100) по п.1, отличающийся тем, что модель (Мо) изменения смещения как функции от команды управления является таблицей, перечисляющей множество значений смещения частоты как функции от значения команды (Со) управления.
6. Твердотельный лазерный гироскоп (100) по одному из предшествующих пунктов, отличающийся тем, что дополнительно содержит средство для измерения температуры, по меньшей мере, в одной точке в резонаторе.
7. Твердотельный лазерный гироскоп (100) по п.6, отличающийся тем, что средство для измерения температуры выполнено с возможностью измерять температуру с ошибкой менее 5°С.
8. Твердотельный лазерный гироскоп (100) по п.6, отличающийся тем, что модель (Мо) дополнительно является функцией от температуры в одной или более точках в резонаторе.
9. Твердотельный лазерный гироскоп (100) по п.1, отличающийся тем, что средство (23) для измерения команды (Со) управления измеряет команду управления с относительной ошибкой менее или равной 10-4.
10. Твердотельный лазерный гироскоп (100) по п.1, отличающийся тем, что средство (23) для измерения команды управления является средством для измерения силы света.
11. Твердотельный лазерный гироскоп (100) по п.1, отличающийся тем, что средство (23) для измерения команды управления является средством для измерения напряжения.
| FR 2853061 A1, 01.10.2004 | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| RU 2006102425 A1, 20.08.2007 | |||
| КОЛЬЦЕВОЙ ЛАЗЕР | 2001 |
|
RU2188488C1 |
| US 4783169 A, 08.11.1988 | |||
| US 3862803 A, 28.01.1975 | |||

