Область техники
Изобретение относится к медицинской технике и может быть использовано преимущественно в сепараторах компонентов донорской крови или в аутогемотрансфузерах.
Уровень техники
В системах разделения крови управляемые клапаны для пережима гибких трубопроводов используются для ручного или автоматического управления потоком крови при прохождении ее по эластичным трубопроводам физиологического блока сепаратора компонентов донорской крови или аутогемотрансфузера.
Известны различные управляемые вручную пережимные устройства в виде зажимов гибких трубопроводов, используемые в обычной практике при операциях и при переливании крови пациенту. Одна из таких конструкций показана, в частности, в описании изобретения по патенту США №5634893, 604/6.1, А61М 1/00, А61М 1/36, А61М 37/00, 03.06.1997. Зажим выполнен из полимерного материала в виде пластинки с фигурным вырезом грибовидной формы, состоящим из круглой части, через которую пропускается гибкий трубопровод, и прямоугольной части, кромки которой пережимают гибкий трубопровод при сдвиге зажима в направлении, перпендикулярном оси трубопровода. Однако целесообразность использования управляемых вручную пережимных устройств в сепараторах компонентов донорской крови вызывает проблему согласования работы оператора, управляющего клапанами, с автоматической работой самого сепаратора или аутогемотрансфузера.
Известны также дистанционно управляемые клапаны для пережима гибких трубопроводов сепаратора компонентов донорской крови, работа которых может контролироваться системой управления сепаратора. Например, в патенте RU 110277 U1, A61M 1/00, 20.11.2011 использован дистанционно управляемый клапан для пережима гибкого трубопровода, выполненный в виде установленного на трубопроводе зажима с пневмоприводом, связанным с распределителем давления, подключенным к системе управления сепаратора. Данный клапан легко компонуется с сепараторами, имеющими другие пневмоуправляемые агрегаты, например насосы для перекачки крови с пневматическим приводом. Однако если в составе сепаратора или аутогемотрансфузера отсутствуют иные пневмоуправляемые агрегаты, то использование данных клапанов усложняет конструкцию сепаратора или аутогемотрансфузера либо требует подключения их к внешней пневматической сети.
Известен также управляемый клапан для пережима гибкого трубопровода сепаратора компонентов донорской крови, содержащий ложе для гибкого трубопровода, в противолежащих стенках которого выполнены прорези, в которых расположены пережимающие элементы, при этом один из пережимающих элементов служит опорой при работе другого пережимающего элемента. Первый пережимающий элемент может совершать возвратно-поступательное перемещение с помощью электропривода, второй пережимающий элемент оснащен пружинным приводом (DE 19900320 С1, F16K 7/02, A61M 1/14, 06.07.2000). В данном устройстве фактически использованы два пережимных элемента, что усложняет работу устройства. Кроме того, конструкция данного устройства исключает ручное управление клапаном, что усложняет обслуживание сепаратора, особенно при установке в него системы гибких трубопроводов, которая выполняется перед каждой обработкой крови.
Известен также управляемый клапан для пережима гибкого трубопровода сепаратора компонентов донорской крови, содержащий корпус, в верхней части которого выполнена прорезь для гибкого трубопровода. С одной стороны прорези размещен неподвижный пережимающий элемент в виде круглого стержня, а с противоположной стороны размещен поджимающий элемент в виде поршня. Поршень перемещается электромагнитным приводом, который имеет два положения: верхнее и нижнее (JP 2004324730 А, А61М 1/14, F16K 7/04, 18.11.2004).
Преимуществом данной конструкции является моноблочное исполнение клапана, что упрощает компоновку клапанов в сепараторе. Однако данное устройство, так же как и предыдущее, не обеспечивает ручное управление клапаном. Кроме того, использование электромагнитного привода исключает возможность регулирования рабочих характеристик клапана, в частности величины перемещения поршня. Управление клапаном производится по внешним командам.
В современных сепараторах донорской крови, так же как и в аутогемотрансфузерах, все управляемые клапаны для пережима гибких трубопроводов сепаратора функционально завязаны на центральный процессор, в силу чего вся работа клапанов (подача команды на запуск, управление режимами и отключение клапанов) управляется центральным процессором или аналогичным блоком управления, в связи с чем приходится передавать большой объем информации по линиям связи.
Раскрытие изобретения
Задачей, на решение которой направлено предлагаемое изобретение, является разработка управляемого клапана для пережима гибкого трубопровода сепаратора компонентов донорской крови или аутогемотрансфузера, который представляет собой самостоятельный унифицированный узел, для работы с которым требуется минимальный объем управляющей информации от внешнего источника.
Еще одной задачей предлагаемого изобретения является разработка управляемого клапана, отдельные узлы которого могли бы быть использованы в других аналогичных клапанах с иными рабочими характеристиками, например с разной величиной перемещения рабочего органа.
Дополнительные решаемые задачи и преимущества предлагаемого изобретения будут понятны из последующего описания.
Для решения поставленных задач предлагается управляемый клапан для пережима гибкого трубопровода сепаратора компонентов донорской крови, содержащий:
базовый корпус, с одной стороны которого установлен оголовок клапана с управляемым пережимным устройством для регулирования проходного сечения гибкого трубопровода, а с нижней стороны присоединен блок дистанционно управляемого привода для перемещения пережимного устройства,
и систему управления клапаном,
при этом блок дистанционно управляемого привода включает в себя продольно перемещаемый рабочий элемент и электродвигатель для возвратно-поступательного перемещения рабочего элемента,
базовый корпус выполнен с продольным каналом, через который пропущен указанный рабочий элемент,
оголовок клапана выполнен с поперечной прорезью с ложементом для гибкого трубопровода, пережимное устройство для регулирования проходного сечения гибкого трубопровода выполнено в виде подпружиненной трехплечей качалки, при этом в оголовке клапана выполнен пересекающий поперечную прорезь соответствующий продольный фигурный паз, расположенный в одной плоскости с продольным каналом базового корпуса и имеющий форму перевернутого «Т» для размещения в нем указанной трехплечей качалки, при этом указанная трехплечая качалка закреплена на оси в нижней части фигурного паза таким образом, что первое плечо трехплечей качалки пересекает ложемент для гибкого трубопровода и его верхний конец выступает над торцом оголовка клапана, второе плечо трехплечей качалки присоединено к нижней части первого плеча трехплечей качалки и расположено над продольным каналом базового корпуса с возможностью взаимодействия с продольно перемещаемым рабочим элементом дистанционно управляемого привода, а третье плечо трехплечей качалки присоединено к нижней части первого плеча трехплечей качалки с противоположной стороны и его конец выступает за боковую поверхность оголовка клапана,
при этом система управления клапаном включает в себя микропроцессор для управления электродвигателем привода для перемещения пережимного устройства, получающий команды от внешнего управляющего устройства, и подключенный к микропроцессору бесконтактный датчик положения клапана, взаимодействующий с третьим плечом трехплечей качалки, при этом микропроцессор и бесконтактный датчик положения клапана размещены на печатной плате, закрепленной на базовом корпусе.
Достижению технического результата способствуют также частные существенные признаки изобретения.
Выступающий конец первого плеча трехплечей качалки выполнен со скосом.
В оголовке клапана над вторым плечом трехплечей качалки выполнено гнездо, в котором размещена пружина трехплечей качалки.
Бесконтактный датчик положения клапана выполнен оптическим.
Оптический бесконтактный датчик положения клапана оснащен, по меньшей мере, одним фотоинтерраптором, при этом флажок фотоинтерраптора закреплен на третьем плече трехплечей качалки.
Трехплечая качалка снабжена ограничителем углового перемещения в виде выступа на нижней поверхности трехплечей качалки, взаимодействующего с опорной стенкой паза, выполненного в базовом корпусе.
Электродвигатель для возвратно-поступательного перемещения рабочего элемента связан с ним посредством кинематической пары «винт-гайка».
Сущность изобретения заключается в том, что предлагаемый управляемый клапан использует для перемещения пережимного устройства, а именно трехплечей качалки, электропривод, что позволяет унифицировать питание сепаратора компонентов донорской крови или аутогемотрансфузера и отказаться от использования пневматики, что способствует унификации данных приборов и их узлов. Разделение управляемого клапана на три основных блока (оголовок, базовый корпус и блок привода) позволяет при изменении рабочих характеристик клапана дорабатывать самостоятельно каждый из блоков с минимальным изменением конструкции остальных блоков. Использование электродвигателя дает возможность сделать клапан с автономной системой управления. Так, для работы клапана не требуется подключение его к пневмосистеме, в том числе при проверке функционирования и настройке клапана как в составе сепаратора или аутогемотрансфузера, так и вне его. Использование в клапане трехплечей качалки дает возможность использовать ее третье плечо как элемент контроля режима работы клапана («закрыто-открыто»), в том числе с использованием оптоэлектронных систем контроля. Использование собственного микропроцессора обеспечивает работу клапана при минимальном поступлении внешней информации (достаточно команды «открыть-закрыть»), а все параметры настройки электродвигателя выполняются микропроцессором клапана без использования центрального процессора сепаратора или аутогемотрансфузера. Компоновка оголовка клапана обеспечивает функционирование клапана как в рабочем режиме, так и в режиме ручного управления, например, при монтаже системы гибких трубопроводов в сепараторе или аутогемотрансфузере, так как обеспечивает свободную установку гибкого трубопровода путем перемещения вручную трехплечей качалки в положение «открыто».
Кинематическая связь электродвигателя с рабочим элементом посредством пары «винт-гайка» обеспечивает возможность регулирования перемещения рабочего элемента, в том числе изменение, при необходимости, его верхнего и нижнего положений, с запоминанием их в микропроцессоре для последующего управления работой клапана.
Технический результат, получаемый при использовании изобретения, заключается в возможности использования предлагаемого клапана в разных сепараторах или аутогемотрансфузерах с разными характеристиками и в возможности перенастраивать рабочие характеристики самого клапана.
Приведенные далее описание предлагаемого управляемого клапана для пережима гибкого трубопровода сепаратора компонентов донорской крови или аутогемотрансфузера и сопровождающие чертежи предназначены только для иллюстрации изобретения и ни в коем случае не ограничивают объема формулы изобретения.
Краткое описание чертежей
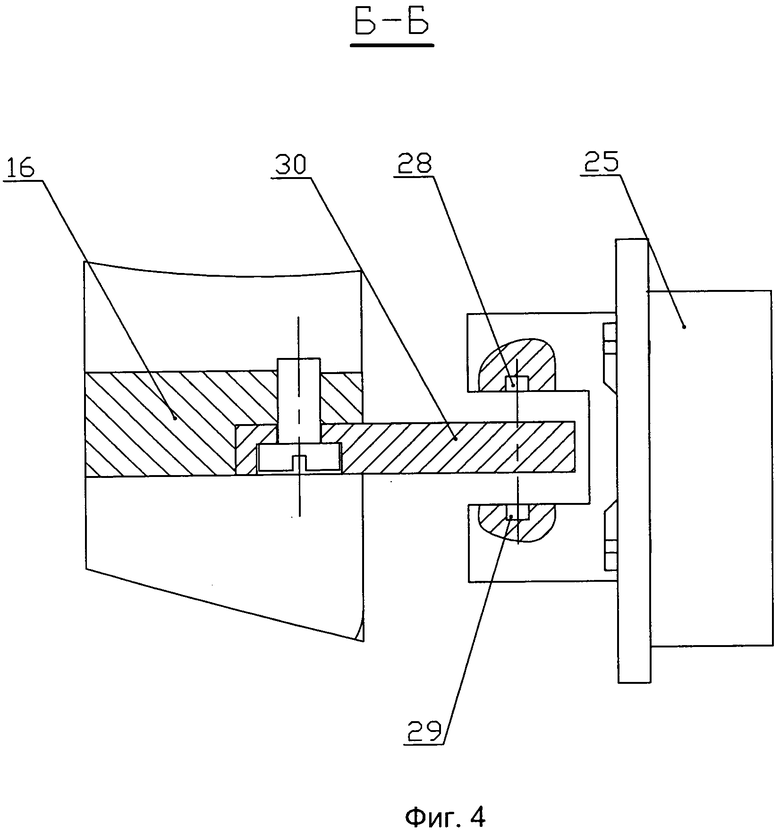
На фиг.1 и 2 показан общий вид управляемого клапана для пережима гибкого трубопровода сепаратора компонентов донорской крови, в открытом и закрытом положении соответственно; на фиг.3 - вид А на фиг.1; на фиг.4 - сечение Б-Б на фиг.2. На приведенных чертежах одни и те же детали обозначены одинаковыми позициями.
Осуществление изобретения
Управляемый клапан содержит:
базовый корпус 1, с одной стороны которого установлен оголовок 2 клапана, выполненный с поперечной прорезью 3 с ложементом 4 для гибкого трубопровода 5, входящего в состав физиологического блока сепаратора компонентов донорской крови;
размещенное в оголовке 2 клапана управляемое пережимное устройство 6 для регулирования проходного сечения гибкого трубопровода 5;
присоединенный с нижней стороны к базовому корпусу 1 блок 7 дистанционно управляемого привода для перемещения пережимного устройства 6;
и систему управления клапаном.
Блок 7 дистанционно управляемого привода выполнен в виде актуатора 8, включающего в себя продольно перемещаемый рабочий элемент - шток 9 актуатора, пропущенный через продольный канал 10, выполненный в базовом корпусе 1, и электродвигатель 11 для возвратно-поступательного перемещения штока 9. Электродвигатель 11 связан со штоком 9 посредством кинематической пары типа «винт-гайка» 12.
Пережимное устройство 6 содержит подпружиненную трехплечую качалку 13. Трехплечая качалка 13 имеет первое плечо 14, воздействующее на гибкий трубопровод 5, и его верхний конец выступает над торцом оголовка 2 клапана, второе плечо 15 трехплечей качалки 13 присоединено к нижней части ее первого плеча 14 и расположено над продольным каналом 10 базового корпуса 1 с возможностью взаимодействия со штоком 9 актуатора 8, а третье плечо 16 трехплечей качалки присоединено к нижней части ее первого плеча 14 с противоположной стороны относительно второго плеча 15, и его конец выступает за боковую поверхность оголовка 2 клапана. На нижней поверхности трехплечей качалки 13 имеется выступ 17, являющийся ограничителем ее углового перемещения.
В оголовке 2 клапана выполнен пересекающий поперечную прорезь 3 продольный фигурный паз 18, расположенный в одной плоскости с продольным каналом 10 базового корпуса 1 и имеющий форму перевернутого «Т» для размещения в нем трехплечей качалки 13. Трехплечая качалка 13 закреплена на оси 19 в нижней части фигурного паза 18 таким образом, что первое плечо 14 трехплечей качалки 13 пересекает ложемент 4 для гибкого трубопровода 5.
Выступающий конец первого плеча 14 трехплечей качалки 13 выполнен со скосом 20 для ручного управления клапаном. В оголовке 2 клапана над вторым плечом 15 трехплечей качалки 13 выполнено гнездо 21, в котором размещена пружина 22 пережимного устройства 6.
В верхней части базового корпуса 1 выполнен паз 23, в котором размещен выступ 17 трехплечей качалки 13. Стенка 24 паза 23 является опорной стенкой для выступа 17.
В открытом положении клапана, показанном на фиг.1, шток 9 актуатора 8 выдвинут в верхнее положение и торец штока 9 воздействует на второе плечо 15 трехплечей качалки 13, предотвращая воздействие ее первого плеча 14 на гибкий трубопровод 5.
В закрытом положении клапана, показанном на фиг.2, шток 9 актуатора 8 находится в нижнем положении и под действием пружины 22 первое плечо 14 трехплечей качалки 13 пережимает гибкий трубопровод 5.
Система управления клапаном содержит микропроцессор 25 для управления электродвигателем 11, получающий команды от внешнего управляющего устройства, например от центрального процессора системы управления сепаратором (на чертеже не показано), и подключенный к микропроцессору 25 бесконтактный датчик положения клапана, взаимодействующий с третьим плечом 16 трехплечей качалки 13. В рассматриваемом примере осуществления изобретения бесконтактный датчик включает в себя два фотоинтерраптора 26 и 27, расположенные друг над другом.
Фотоинтерраптор представляет собой оптический бесконтактный выключатель, который обнаруживает объекты, перекрывающие оптическое излучение. Конструкция фотоинтерраптора не является предметом изобретения. В общем случае фотоинтерраптор включает в себя светоизлучающий элемент (светодиод, лазер и т.п.), приемник излучения (фотодатчик, выполненный, например, в виде фотодиода, фототранзистора и т.п.) и флажок, размещенный между светоизлучающим элементом и приемником излучения. В рассматриваемом примере осуществления изобретения в каждом фотоинтеррапторе светоизлучающий элемент 28 и светопринимающий элемент 29 размещены с двух сторон относительно внешнего конца третьего плеча 16 трехплечей качалки 13. На третьем плече 16 трехплечей качалки 13 закреплен флажок 30. Третье плечо 16 трехплечей качалки 13 может непосредственно являться флажком фотоинтерраптора, но предпочтительно флажок 30 выполнить в виде отдельной детали, как это сделано в предлагаемом изобретении.
Микропроцессор 25 и фотоинтеррапторы 26 и 27 размещены на печатной плате 31, закрепленной на базовом корпусе 1. Печатная плата 31 проектируется по известным правилам и здесь не рассматривается.
Предлагаемый клапан работает следующим образом.
Перед началом работы сепаратора клапан находится в открытом положении, показанном на фиг.1. Пережимное устройство 6 под действием штока 9 переведено в крайнее правое положение и не перекрывает поперечную прорезь 3 и ложемент 4. Таким образом, гибкий трубопровод 5 может быть свободно уложен на ложемент 4 в прорези 3.
Данная операция может быть проведена вручную оператором сепаратора путем нажатия на скос 20 выступающего конца первого плеча 14 трехплечей качалки 13, если шток 9 актуатора 8 находится в нижнем положении. При этом угол поворота трехплечей качалки 13 ограничен упором 17, который в предельном положении трехплечей качалки 13 опирается на стенку 24 паза 23.
При работе сепаратора компонентов донорской крови в автоматическом режиме все перемещения трехплечей качалки 13 контролируются микропроцессором 25. Работа клапана происходит следующим образом.
В рассматриваемом примере осуществления изобретения гибкий трубопровод 5 полностью открыт и по нему может свободно протекать донорская кровь или ее компоненты. Третье плечо 16 трехплечей качалки 13 находится в нижнем положении, и флажок 30 перекрывает фотоинтерраптор 26. Сигнал с фотоинтерраптора 27 подтверждает микропроцессору 25, что клапан находится в отрытом положении.
При поступлении на микропроцессор 25 внешней команды на закрытие клапана микропроцессор 25 выдает команду на запуск электродвигателя 11 актуатора 8 и шток 9 актуатора перемещается вниз. Под действием пружины 22 трехплечая качалка 13 поворачивается, третье плечо 16 трехплечей качалки 13 перемещается вверх и флажок 30 перестает перекрывать фотоинтерраптор 26, сигнал с которого сообщает микропроцессору 25, что трехплечая качалка 13 начала поворачиваться, выполняя команду микропроцессора 25 на закрытие клапана. При дальнейшем повороте трехплечей качалки 13 ее первое плечо 14 входит в соприкосновение с гибким трубопроводом 5 и при продолжении перемещения трехплечей качалки 13 под действием пружины 22 пережимает гибкий трубопровод 5, переводя клапан в положение «закрыто». При этом третье плечо 16 трехплечей качалки 13 перемещается вверх и флажок 30 перекрывает фотоинтерраптор 27. Фотоинтерраптор 27 выдает сигнал микропроцессору 25, что команда на закрытие клапана исполнена, и микропроцессор 25 выдает команду на выключение электродвигателя 11 актуатора 8. Электродвигатель 11 может быть выключен непосредственно после выдачи сигнала с фотоинтерраптора 27, либо спустя некоторое время, если требуется, чтобы шток 9 актуатора 8 не соприкасался со вторым плечом 15 трехплечей качалки 13. После подачи команды на выключение электродвигателя 11 микропроцессор 25 сообщает центральному процессору сепаратора об исполнении команды на закрытие клапана и ждет новой команды.
При поступлении на микропроцессор 25 внешней команды на открытие клапана микропроцессор 25 выдает команду на запуск электродвигателя 11 актуатора 8 и шток 9 актуатора перемещается вверх и вступает во взаимодействие со вторым плечом 15 трехплечей качалки 13. Преодолевая действие пружины 22, шток 9 актуатора 8 начинает поворачивать трехплечую качалку 13, при этом первое плечо 14 трехплечей качалки 13 начинает перемещаться вправо, ослабляя воздействие на стенку гибкого трубопровода 5, выполняя команду микропроцессора 25 на открытие клапана. При этом третье плечо 16 трехплечей качалки 13 перемещается вниз и флажок 30 перестает перекрывать фотоинтерраптор 27. Фотоинтерраптор 27 выдает сигнал микропроцессору 25, что трехплечая качалка 13 начала поворачиваться, выполняя команду микропроцессора 25 на открытие клапана. При дальнейшем повороте трехплечей качалки 13 ее первое плечо 14 выходит из соприкосновения с гибким трубопроводом 5, полностью освобождая сечение гибкого трубопровода 5 для протока крови или ее компонентов. Третье плечо 16 трехплечей качалки 13 продолжает движение вниз и флажок 30 перекрывает фотоинтерраптор 26. Фотоинтерраптор 26 выдает сигнал микропроцессору 25, что команда на открытие клапана исполнена, и микропроцессор 25 выдает команду на выключение электродвигателя 11 актуатора 8. Электродвигатель 11 может быть выключен непосредственно после выдачи сигнала с фотоинтерраптора 26. После подачи команды на выключение электродвигателя 11 микропроцессор 25 сообщает центральному процессору сепаратора об исполнении команды на открытие и ждет новой команды.
Как видно из описания работы клапана, при работе его в автоматическом режиме величина хода штока 9 актуатора 8 и его верхнее и нижнее положения не являются фиксированными и могут задаваться микропроцессором 25 по команде с фотоинтеррапторов 26 и 27, что позволяет унифицировать привод 7 и использовать его при работе с разными оголовками, имеющими разные углы поворота трехплечей качалки 13. При этом время срабатывания фотоинтеррапторов 26 и 27 может регулироваться шириной флажка 30, который можно заменять.
Промышленная применимость
Предлагаемый клапан может быть изготовлен промышленным способом на приборостроительных заводах или на заводах медицинского оборудования с использованием известных материалов, современных электронных компонентов и технологий. При реализации управляемого клапана в качестве дистанционно управляемого привода может быть использован линейный шаговый актуатор Can-Stack 36463-05-011 фирмы Haydon Kerk, а в качестве оптического бесконтактного датчика положения клапана - фотоинтерраптор KTIR0521DS фирмы Kingbright. Реализация системы управления клапаном может быть произведена по известным правилам и не представляет труда для специалистов. Она может быть выполнена, в частности, на базе микроконтроллера ATmega88 фирмы Atmel.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ОДНОИГОЛЬНОГО МЕМБРАННОГО ПЛАЗМАФЕРЕЗА | 2001 |
|
RU2203099C2 |
| Прямоточный стерилизуемый побудитель расхода культуральной жидкости | 1989 |
|
SU1687601A1 |
| ФИЗИОЛОГИЧЕСКИЙ БЛОК ДЛЯ АУТОГЕМОТРАНСФУЗЕРА, ИМЕЮЩЕГО ДВА ПЕРИСТАЛЬТИЧЕСКИХ НАСОСА | 2009 |
|
RU2407554C1 |
| ШЛАНГОВЫЙ КЛАПАН (ВАРИАНТЫ) | 2005 |
|
RU2299373C2 |
| ШЛАНГОВЫЙ КЛАПАН | 2005 |
|
RU2299374C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ СТЕРИЛЬНОСТИ ДЛЯ СИСТЕМ ВЛИВАНИЯ ЖИДКОСТИ | 2001 |
|
RU2289426C2 |
| АУТОГЕМОТРАНСФУЗЕР | 2005 |
|
RU2284194C1 |
| Одноигольная перфузионная система | 1984 |
|
SU1261671A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АУТОТРАНСФУЗИИ | 2005 |
|
RU2391120C2 |
| СПОСОБ ПЛАЗМАФЕРЕЗА В ОДНОИГОЛЬНОМ ЭКСТРАКОРПОРАЛЬНОМ КОНТУРЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491100C1 |



Изобретение относится к медицинской технике, а именно к управляемым клапанам, которые могут быть использованы в сепараторах компонентов донорской крови или в аутогемотрансфузерах. Управляемый клапан содержит базовый корпус, с одной стороны которого установлен оголовок клапана с управляемым пережимным устройством для регулирования проходного сечения гибкого трубопровода, а с нижней стороны присоединен блок дистанционно управляемого привода для перемещения пережимного устройства, и систему управления клапаном. Основу клапана составляет подпружиненная трехплечая качалка и актуатор с контролируемым перемещением штока. Первое плечо трехплечей качалки взаимодействует с гибким трубопроводом, второе плечо - со штоком актуатора, а третье плечо - с фотоинтеррапторами системы управления. Технический результат - возможность использования клапана в сепараторах или аутогемотрансфузерах с разными характеристиками и возможность перенастраивать рабочие характеристики самого клапана. 6 з.п. ф-лы, 4 ил.
1. Управляемый клапан для пережима гибкого трубопровода сепаратора компонентов донорской крови или аутогемотрансфузера, содержащий:
базовый корпус, с одной стороны которого установлен оголовок клапана с управляемым пережимным устройством для регулирования проходного сечения гибкого трубопровода, а с нижней стороны присоединен блок дистанционно управляемого привода для перемещения пережимного устройства,
и систему управления клапаном,
при этом блок дистанционно управляемого привода включает в себя продольно перемещаемый рабочий элемент и электродвигатель для возвратно-поступательного перемещения рабочего элемента,
базовый корпус выполнен с продольным каналом, через который пропущен указанный рабочий элемент,
оголовок клапана выполнен с поперечной прорезью с ложементом для гибкого трубопровода, пережимное устройство для регулирования проходного сечения гибкого трубопровода выполнено в виде подпружиненной трехплечей качалки, при этом в оголовке клапана выполнен пересекающий поперечную прорезь соответствующий продольный фигурный паз, расположенный в одной плоскости с продольным каналом базового корпуса и имеющий форму перевернутого «Т» для размещения в нем указанной трехплечей качалки, при этом указанная трехплечая качалка закреплена на оси в нижней части фигурного паза таким образом, что первое плечо трехплечей качалки пересекает ложемент для гибкого трубопровода и его верхний конец выступает над торцом оголовка клапана, второе плечо трехплечей качалки присоединено к нижней части первого плеча трехплечей качалки и расположено над продольным каналом базового корпуса с возможностью взаимодействия с продольно перемещаемым рабочим элементом дистанционно управляемого привода, а третье плечо трехплечей качалки присоединено к нижней части первого плеча трехплечей качалки с противоположной стороны, и его конец выступает за боковую поверхность оголовка клапана,
при этом система управления клапаном включает в себя микропроцессор для управления электродвигателем привода для перемещения пережимного устройства, получающий команды от внешнего управляющего устройства, и подключенный к микропроцессору бесконтактный датчик положения клапана, взаимодействующий с третьим плечом трехплечей качалки, при этом микропроцессор и бесконтактный датчик положения клапана размещены на печатной плате, закрепленной на базовом корпусе.
2. Управляемый клапан по п.1, отличающийся тем, что выступающий конец первого плеча трехплечей качалки выполнен со скосом.
3. Управляемый клапан по п.1, отличающийся тем, что в оголовке клапана над вторым плечом трехплечей качалки выполнено гнездо, в котором размещена пружина трехплечей качалки.
4. Управляемый клапан по п.1, отличающийся тем, что бесконтактный датчик положения клапана выполнен оптическим.
5. Управляемый клапан по п.4, отличающийся тем, что оптический бесконтактный датчик положения клапана оснащен по меньшей мере одним фотоинтерраптором, при этом флажок фотоинтерраптора закреплен на третьем плече трехплечей качалки.
6. Управляемый клапан по п.1, отличающийся тем, что трехплечая качалка снабжена ограничителем углового перемещения в виде выступа на нижней поверхности трехплечей качалки, взаимодействующего с опорной стенкой паза, выполненного в базовом корпусе.
7. Управляемый клапан по п.1, отличающийся тем, что электродвигатель для возвратно-поступательного перемещения рабочего элемента связан с ним посредством кинематической пары «винт-гайка».
| WO 03070314 A1, 28.08.2003 | |||
| WO9007353 A1, 12.07.1990 | |||
| US2005119626 A1, 02.06.2005 | |||
| УЛУЧШЕННОЕ СОПРЯЖЕНИЕ СТОПОРА ПОТОКА ДЛЯ МЕДИЦИНСКИХ ИНСТРУМЕНТОВ | 2002 |
|
RU2286179C2 |

