Область техники
Настоящее изобретение относится к устройству управления для гибридного транспортного средства.
Уровень техники
Известна система управления запуском двигателя для гибридного транспортного средства, оснащенного по меньшей мере двигателем, электромотором для запуска двигателя, инвертором для управления электромотором и аккумулятором для подачи мощности в электромотор через инвертор. Известна такая технология, чтобы управлять частотой вращения электромотора таким образом, что доступная выходная мощность превышает требуемую мощность во время запуска двигателя, на основе доступной выходной мощности или потенциальной мощности, выводимой с помощью аккумулятора, и мощности аккумулятора, необходимой для того, чтобы запускать двигатель, причем первая из означенной вычисляется на основе данных, указывающих взаимосвязь между температурой аккумулятора, остаточной емкостью аккумулятора, температурой аккумулятора, определяемой посредством датчика температуры аккумулятора, и емкостью аккумулятора, определяемой посредством контроллера аккумулятора (Патентный Документ 1).
Патентные документы
Патентный документ 1: публикация выложенной заявки на патент Японии № 2008-62745
Задачи, на решение которых направлено изобретение
Тем не менее, потенциальная выходная мощность, вычисленная в традиционной технологии, означает значение мощности, которое может выводиться на стабильной основе в течение предварительно определенного периода времени (эквивалентного "значению за несколько секунд", используемому, в общем, при управлении мощностью), и это значение мощности (значение за несколько секунд) также используется для сравнения с требуемой мощностью.
Поскольку это значение мощности (значение за несколько секунд) указывает, как описано выше, значение мощности, которое может выводиться на стабильной основе в течение предварительно определенного времени, оно представляет меньшее значение, чем значение мощности, которое может выводиться моментально (мгновенное значение).
При сравнении с требуемой мощностью посредством использования значения мощности (значения за несколько секунд), как указано, хотя значение мощности (мгновенное значение) превышает требуемую мощность, поскольку значение мощности (значение за несколько секунд) опускается ниже требуемой мощности, существует риск чрезмерного снижения целевой частоты вращения электромотора. По мере того как уменьшается целевая частота вращения электромотора, надежность запуска двигателя снижается вследствие риска более длительного периода времени до завершения операции запуска двигателя. Очевидно, что при возросшем периоде времени для завершения запуска двигателя имеется вероятность того, что предварительно определенное время для стабильного вывода мощности, предполагаемое на основе значения мощности (значения за несколько секунд), также превышается, так что дополнительно снижается надежность запуска двигателя.
Проблема, которую должно разрешать настоящее изобретение, состоит в том, чтобы повышать надежность запуска двигателя для транспортного средства, в котором двигатель запускается посредством электромотора, приводимого в действие посредством подачи мощности из аккумулятора.
Средства решения задач
Настоящее изобретение разрешает вышеуказанную проблему посредством запуска двигателя внутреннего сгорания за счет управления инвертором при управлении выводом аккумулятора посредством модуля управления напряжением в соответствии с первым значением мощности, которое может выводиться в текущее время в рамках предельного напряжения или фиксированного напряжения смещения аккумулятора.
Преимущества изобретения
Согласно настоящему изобретению, повышается надежность запуска двигателя.
Краткое описание чертежей
Фиг.1 является блок-схемой, показывающей общую конфигурацию гибридного транспортного средства в одном варианте осуществления настоящего изобретения.
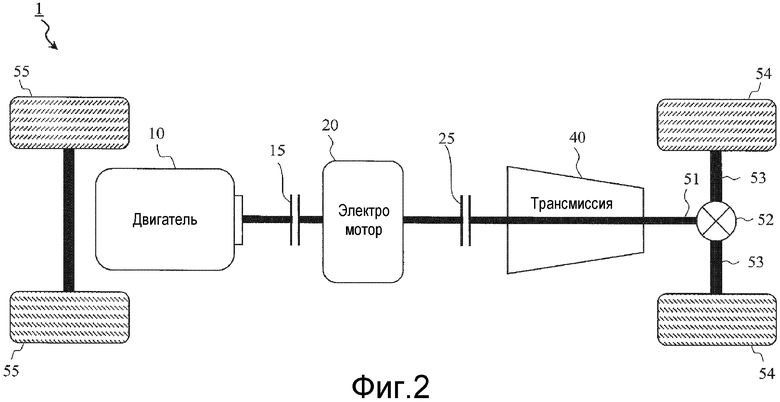
Фиг.2 является схемой, показывающей силовую передачу гибридного транспортного средства согласно другому варианту осуществления настоящего изобретения.
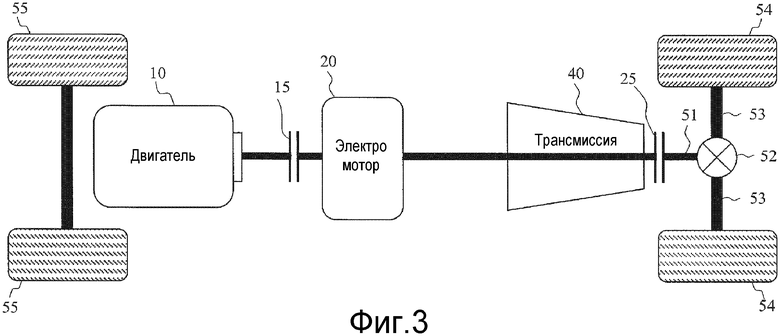
Фиг.3 является схемой, показывающей силовую передачу гибридного транспортного средства согласно еще одному другому варианту осуществления настоящего изобретения.
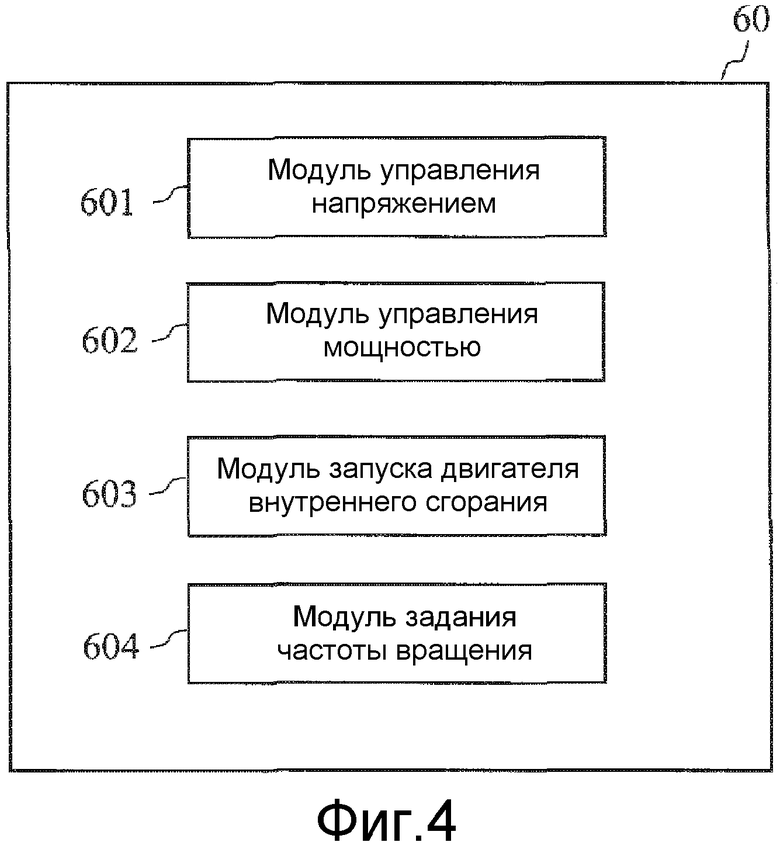
Фиг.4 является структурной схемой управления, показывающей подробности единого модуля управления с фиг.1.
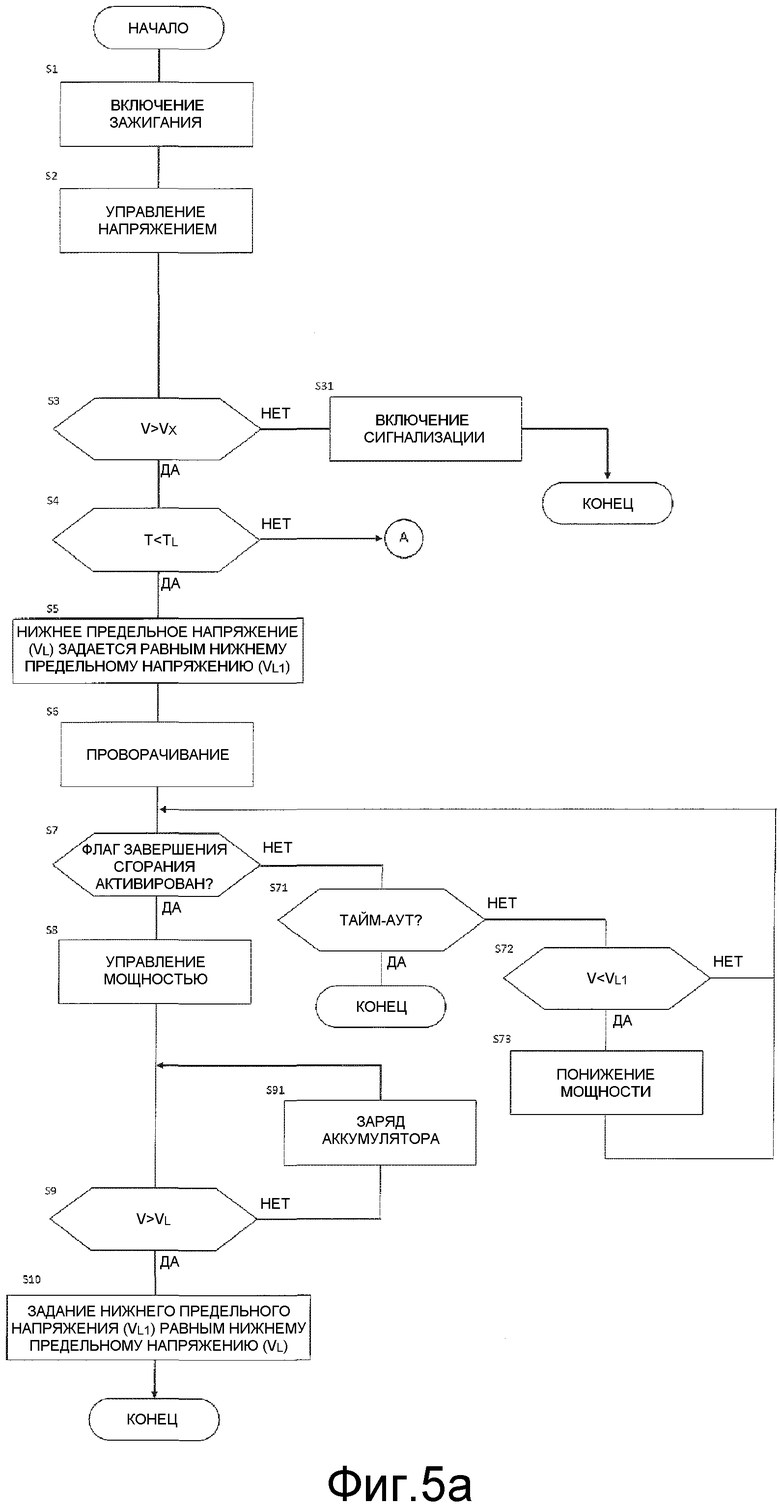
Фиг.5a является блок-схемой последовательности операций способа, показывающей управляющую процедуру в едином модуле управления с фиг.1.
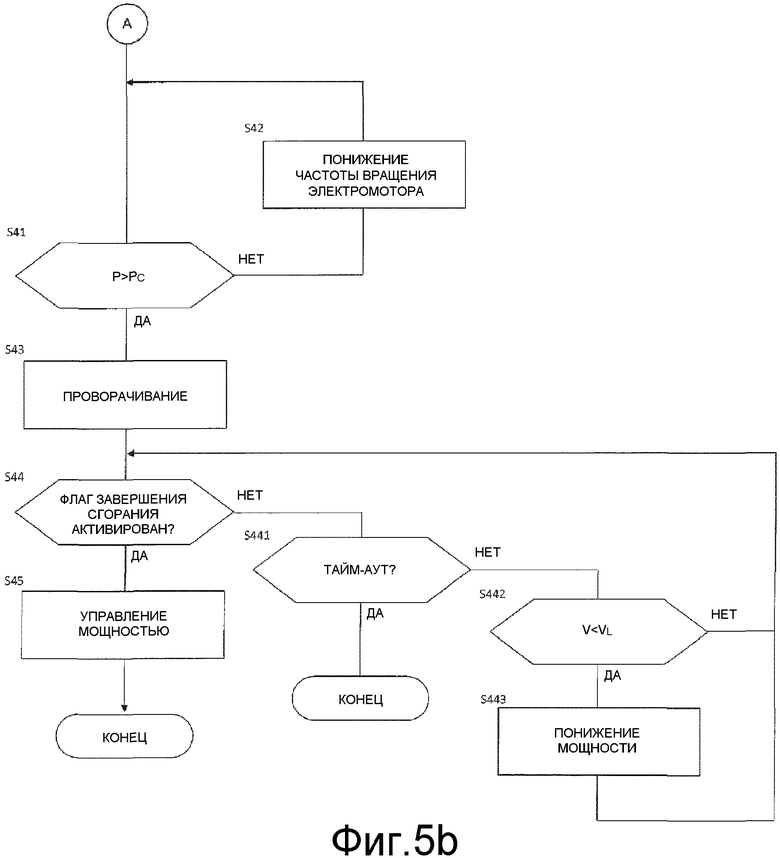
Фиг.5b является блок-схемой последовательности операций способа, показывающей управляющую процедуру в едином модуле управления с фиг. 1.
Способ осуществления изобретения
Гибридное транспортное средство 1, включающее в себя систему управления согласно варианту осуществления настоящего изобретения, является транспортным средством на основе параллельной системы с использованием множества источников мощности, таких как двигатель внутреннего сгорания и электрический генератор. Как показано на фиг.1, гибридное транспортное средство 1 в настоящем варианте осуществления содержит двигатель внутреннего сгорания (в дальнейшем называемый "двигателем"), первую муфту 15, электрический генератор 20 (в дальнейшем "электромотор-генератор"), вторую муфту 25, аккумулятор 30, инвертор 35, автоматическую трансмиссию 40, карданный вал 51, блок 52 дифференциала, ведущий вал 53 и левое и правое ведущие колеса 53, 54.
Двигатель 10 является одним из источников приведения в движение, который выводит энергию приведения в движение посредством сгорания бензина, дизельного топлива и т.д., и степень открытия дроссельного клапана или объем впрыска топлива клапана впрыска топлива и т.д. управляются на основе управляющего сигнала из модуля 70 управления двигателем.
Первая муфта 15 размещается между выходным валом двигателя 10 и вращательным валом электромотора-генератора 20 и тем самым избирательно подключается и отключается (операция включения/выключения) для передачи мощности между двигателем 10 и электромотором-генератором 20. В качестве примера первой муфты 15, многодисковая гидравлическая муфта может указываться для непрерывного управления гидравлическим расходом и гидравлическим давлением посредством линейного соленоида.
В первой муфте 15 гидравлическое давление гидравлического узла 16 управляется на основе управляющего сигнала из единого модуля 60 управления, и в силу этого диски фрикционной муфты первой муфты 15 должны зацепляться (в том числе и зацепление в остановленном состоянии) или расцепляться. Также можно использовать сухую муфту для первой муфты 15.
Электромотор-генератор 20 является синхронным электромотором/генератором, в котором постоянные магниты встраиваются в ротор, и обмотки статора наматываются вокруг статора. Этот электромотор/генератор 20 дополнительно содержит датчик 21 угла поворота, например, круговой датчик позиции, который определяет угол поворота ротора. Частота вращения электромотора-генератора управляется в соответствии с частотой возбуждения инвертора 35, при этом отношение частоты возбуждения инвертора 35 представляет отношение частоты вращения (передаточное число), в то время как мощность, подаваемая из инвертора 108, служит в качестве возбуждающей силы электромотора-генератора 20. Электромотор-генератор 20 выступает не только в качестве электромотора, но также и в качестве генератора.
С другой стороны, когда ротор вращается посредством внешней силы, электромотор-генератор 20 генерирует мощность переменного тока посредством возникновения электродвижущей силы на обоих концах обмоток статора (рекуперации). Мощность переменного тока, сгенерированная посредством электромотора-генератора 20, преобразуется в мощность постоянного тока посредством инвертора 35 и затем заряжается в аккумулятор 30. Помимо этого, электромотор-генератор 20 может формировать отрицательный крутящий момент во время рекуперации и тем самым также выполняет функцию торможения относительно ведущего колеса.
Электромотор-генератор 20 также имеет функцию стартерного электромотора. Чтобы запускать двигатель 10 посредством подачи мощности в электромотор-генератор 20 из аккумулятора 30, проворачивание двигателя 10 выполняется посредством управления электромотором-генератором 20.
Пример аккумулятора 30 указывается посредством аккумуляторов в сборе, соединенных последовательно или параллельно, таких как множество ионно-литиевых аккумуляторных батарей или никель-водородных аккумуляторных батарей.
Датчик 31 тока и напряжения и температурный датчик 32, чтобы оценивать внутреннее сопротивление, присоединены к аккумулятору 30, соответственно, и их выходные данные определения выводятся в модуль 80 управления электромотором.
Между электромотором-генератором 20 и левым/правым ведущими колесами 54 размещена вторая муфта 25 для избирательного подключения и отключения (операция включения/выключения) передачи мощности между электромотором-генератором 20 и левым/правым ведущими колесами 54. Вторая муфта 25 может формироваться, как и в случае первой муфты 15, например, посредством многодисковой гидравлической муфты. Во второй муфте 25 гидравлическое давление модуля 26 гидравлического давления управляется в соответствии с управляющим сигналом из модуля 90 управления трансмиссией, в силу этого диски фрикционной муфты второй муфты 25 должны зацепляться (в том числе и зацепление в остановленном состоянии) или расцепляться.
Автоматическая трансмиссия 40 формируется посредством ступенчатой трансмиссии, в которой множество передаточных чисел, например, семь передаточных чисел переднего хода и одно передаточное число заднего хода, переключаются ступенчато в зависимости от скорости транспортного средства и степени открытия акселератора и т.п. Передаточное число автоматической трансмиссии 40 управляется на основе управляющего сигнала из модуля 90 управления трансмиссией.
Вторая муфта 25 может стандартно использоваться, как показано на фиг.1, с одним или несколькими элементами из множества элементов фрикционного зацепления, которые закрепляются согласно каждому передаточному числу автоматической трансмиссии 40. В качестве альтернативы, вторая муфта 25 может быть предоставлена отдельно от автоматической трансмиссии 40. Например, как показано на фиг.2, вторая муфта 25 может быть выделенной муфтой, размещенной между выходным валом электромотора-генератора 20 и входным валом автоматической трансмиссии 40. Дополнительно, как показано на фиг.3, вторая муфта 25 может быть выделенной муфтой, размещенной между выходным валом автоматической трансмиссии 40 и входным валом карданного вала 51. Следует отметить, что фиг.2 и 3 показывают конфигурации гибридного транспортного средства в других вариантах осуществления, и части, отличные от силовой передачи, являются идентичными фиг.1, показаны только части, связанные с силовой передачей.
Следует отметить, что поскольку традиционная ступенчатая автоматическая трансмиссия может быть использована в качестве автоматической трансмиссии 40 настоящего варианта осуществления, ее подробная конструкция опускается. Тем не менее, при конфигурировании второй муфты 25 посредством использования нескольких фрикционных зацепляющих элементов из множества фрикционных зацепляющих элементов, которые зацепляются или расцепляются согласно каждому передаточному числу автоматической трансмиссии, эти фрикционные зацепляющие элементы должны выбираться для соединения согласно текущему передаточному числу из фрикционных зацепляющих элементов в автоматической трансмиссии 40.
Дополнительно, автоматическая трансмиссия 40 не ограничена конкретным образом ступенчатой автоматической трансмиссией с семью передаточными числами переднего и заднего хода, как описано выше, и может быть ступенчатой трансмиссией с пятью скоростями переднего хода и одной скоростью заднего хода. Кроме того, когда фрикционный зацепляющий элемент в автоматической трансмиссии 40 не используется стандартно в качестве второй муфты 25, бесступенчатая трансмиссия также может применяться.
Возвращаясь к фиг.1, выходной вал автоматической трансмиссии 40 соединяется с левым и правым ведущими колесами 54 через карданный вал 51, блок 52 дифференциала и левый и правый ведущие валы 53. Помимо этого, ссылка 55 на фиг.1 означает левое и правое управляемые колеса.
Дополнительно, хотя на фиг.1-3 проиллюстрировано заднеприводное гибридное транспортное средство, также возможно применение к гибридному транспортному средству с приводом на четыре колеса или с передним приводом.
Гибридное транспортное средство в настоящем варианте осуществления имеет возможность переключаться между различными режимами приведения в движение, как описано ниже, посредством задания двигателя 10 и/или электромотора-генератора 20 в качестве источника приведения в движение. Иначе говоря, соответствующие режимы движения или приведения в движение переключаются далее в соответствии с зацепленным/проскальзывающим/расцепленным состоянием первой и второй муфт 15, 25.
В режиме движения или приведения в движение с использованием электромотора-генератора (в дальнейшем называемом EV-режимом приведения в движение) первая муфта 15 расцепляется при том, что вторая муфта 25 зацеплена, так что транспортное средство движется с использованием только мощности от электромотора-генератора 20 в качестве источника мощности.
В режиме движения или приведения в движение с использованием двигателя (в дальнейшем называемом HEV-режимом приведения в движение) первая и вторая муфты зацепляются, чтобы приводить в движение транспортное средство с использованием мощности по меньшей мере двигателя 10.
В дополнение к вышеуказанному EV- и HEV-режиму приведения в движение может предоставляться другой режим движения, т.е. режим приведения в движение с проскальзыванием с использованием двигателя, в котором транспортное средство приводится в движение посредством мощности, включающей в себя мощность из двигателя 10, при том что первая муфта 15 зацеплена, а вторая муфта поддерживается в проскальзывающем состоянии (в дальнейшем называемый WSC-режимом приведения в движение, с использованием гидравлической пусковой муфты). WSC-режим приведения в движение выполнен с возможностью осуществлять медленное движение транспортного средства, в частности, когда состояние заряда (SOC) аккумулятора 30 является низким или когда температура охлаждающей жидкости двигателя 10 является низкой.
Следует отметить, что при переключении на HEV-режим приведения в движение из EV-режима приведения в движение первая муфта 15, которая расцеплена, зацепляется, чтобы предоставлять возможность запускать двигатель с использованием крутящего момента электромотора-генератора 20.
Дополнительно, во время HEV-режима приведения в движение предоставляются режим приведения в движение за счет двигателя, режим приведения в движение при содействии электромотора и движение с генерированием электрической мощности, соответственно.
В режиме приведения в движение за счет двигателя ведущие колеса 54 приводятся в движение с использованием только двигателя 10 в качестве источника мощности без работы электромотора-генератора 20. В режиме приведения в движение при содействии электромотора как двигатель 10, так и электромотор-генератор 20 возбуждаются, чтобы приводить в движение ведущие колеса 54 посредством использования обоих из них в качестве источника мощности. В завершение, в режиме движения с генерированием электрической мощности транспортное средство движется посредством приведения в движение ведущих колес 54 с использованием двигателя 10 в качестве источника мощности при заряде аккумулятора 30 за счет предоставления возможности электромотору-генератору выступать в качестве генератора.
Следует отметить, что в дополнение к режимам, описанным выше, в остановленном состоянии транспортного средства управление дополнительно может переключаться на режим генерирования электрической мощности, в котором мощность двигателя 10 используется для того, чтобы обеспечивать возможность электромотору-генератору выступать в качестве генератора, чтобы заряжать аккумулятор 30 или подавать мощность в электрооборудование.
Как показано на фиг.1, система управления гибридным транспортным средством 1 в настоящем варианте осуществления содержит единый модуль 60 управления, модуль 70 управления двигателем, модуль 80 управления электромотором и модуль 90 управления трансмиссией. Эти модули 60, 70, 80, 90 управления соединяются друг с другом, например, через CAN-связь.
Модуль 70 управления двигателем управляет степенью открытия дросселя с электронным управлением, чтобы получать целевой крутящий момент двигателя, вычисленный посредством единого или интегрированного модуля 60 управления. Объем всасываемого воздуха в соответствии с открытием дросселя вводится в двигатель 10, и объем всасываемого воздуха измеряется посредством расходомера воздуха (не показан), расположенного перед дросселем с электронным управлением. Модуль 70 управления двигателем управляет впрыском топлива с использованием топливного инжектора на основе объема всасываемого воздуха и частоты вращения двигателя, определенной посредством датчика угла поворота коленчатого вала (не показан), и дополнительно управляет распределением зажигания с использованием свечи зажигания. Следует отметить, что информация относительно частоты Ne вращения двигателя, крутящего момента Te двигателя выводится в единый контроллер 60 через линию CAN-связи.
Модуль 80 управления электромотором принимает информацию из датчика 21 угла поворота, расположенного в электромоторе-генераторе 20, и выводит в инвертор 35 команду, чтобы управлять рабочей точкой электромотора-генератора 20 (частотой Nm вращения электромотора, крутящим моментом Tm электромотора), чтобы управлять частотой возбуждения инвертора 35 таким образом, что могут достигаться целевая частота вращения и целевой крутящий момент, вычисленные посредством единого модуля 60 управления. Помимо этого, модуль 80 управления электромотором вычисляет и управляет состоянием заряда (SOC) аккумулятора 30 на основе значений тока и напряжения, определенных посредством датчика 31 тока/напряжения. Эта информация SOC аккумулятора используется в качестве управляющей информации электромотора-генератора 20 и отправляется в единый модуль 60 управления через линию CAN-связи.
Кроме того, модуль 80 управления электромотором оценивает крутящий момент Tm электромотора-генератора на основе значения тока, протекающего в электромоторе-генераторе (на основе знака значения тока проводится различие между крутящим моментом для управления приведением в движение за счет электромотора и крутящим моментом рекуперативного торможения). Информация относительно этого крутящего момента Tm электромотора-генератора должна передаваться в единый модуль 60 управления через CAN-связь. Помимо этого, модуль 80 управления электромотором передает температуру аккумулятора, определенную посредством температурного датчика 32, в единый модуль 60 управления.
Модуль 90 управления трансмиссией принимает информацию датчиков из датчика 91 открытия акселератора, датчика 92 скорости транспортного средства, датчика 93 гидравлического давления второй муфты, переключателя 94 режима движения, который выводит сигнал, соответствующий позиции рычага переключения передач, управляемого водителем, и выводит в гидравлический узел 26 инструкцию, чтобы управлять зацеплением и расцеплением второй муфты 25, на основе инструкции управления второй муфтой из единого модуля 60 управления. Следует отметить, что информация касательно открытия APO педали акселератора, скорости VSP транспортного средства и переключателя режима движения передается в модуль 60 управления через CAN-связь.
Посредством управления энергопотреблением всего гибридного транспортного средства 1 единый модуль 60 управления отвечает за функцию эффективного приведения в движения гибридного транспортного средства 1. Модуль 60 управления получает информацию датчиков из датчика 61 выходной частоты вращения второй муфты, чтобы определять выходную частоту N2out вращения второй муфты 25, датчика 62 крутящего момента второй муфты, чтобы определять перегрузочную способность TcL2 по передаточному крутящему моменту второй муфты 25, датчика 63 тормозного гидравлического давления, температурного датчика 64, чтобы определять температуру второй муфты 25, и G-датчика 65, чтобы определять продольное и поперечное ускорение транспортного средства. В дополнение к этой информации, единый контроллер 60 дополнительно принимает сигналы датчиков через CAN-связь.
Кроме того, единый модуль 60 управления выполняет, на основе этой информации, функциональное управление двигателем 10 посредством управляющей инструкции в модуль 70 управления двигателем, функциональное управление электромотором-генератором 20 посредством управляющей инструкции в модуль 80 управления электромотором, функциональное управление автоматической трансмиссией 40 посредством управляющего сигнала в модуль 90 управления трансмиссией, управление зацеплением/расцеплением первой муфты 15 посредством управляющей инструкции в гидравлический узел 16 первой муфты 15 и управление зацеплением/расцеплением второй муфты 25 посредством управляющего сигнала в гидравлический узел 26.
Кроме того, единый модуль 60 управления принимает сигналы в ответ на включение ключа зажигания водителем или удовлетворение условия прекращения глушения двигателя на холостом ходу. Помимо этого, в остановленном состоянии транспортного средства или при приведении в движение транспортного средства при низкой нагрузке, при условии что удовлетворяются предварительно определенные условия автоматической остановки двигателя (т.е. скорость транспортного средства ниже предварительно определенной скорости транспортного средства, величина нажатия педали акселератора ниже предварительно определенной величины и т.д.), двигатель 10 должен быть остановлен автоматически, чтобы дополнительно сокращать расход топлива и выделения выхлопных газов.
Далее приводится описание управления, выполняемого посредством единого модуля 60 управления.
Фиг.4 является блок-схемой управления, показывающей подробности единого модуля 60 управления. Как показано на фиг.4, единый модуль 60 управления включает в себя модуль 601 управления напряжением, модуль 602 управления мощностью, модуль 603 запуска двигателя и модуль 604 задания частоты вращения.
Модуль 601 управления напряжением управляет выводом мощности из аккумулятора 30 в зависимости от определенного напряжения аккумулятора 30, определенного посредством датчика 31 напряжения, температуры аккумулятора и состояния ухудшения характеристик аккумулятора. Относительно модуля 601 управления напряжением, соответственно, задаются верхнее предельное напряжение и нижнее предельное напряжение, и напряжение аккумулятора 30 должно управляться в безопасном диапазоне напряжений между нижним предельным напряжением и верхним пределом. Верхний предел или нижний предел указывают ограничивающее напряжение, при котором может быть безопасно использован аккумулятор 30.
Как описано выше, модуль 80 управления электромотором задает частоту возбуждения инвертора 35 в ответ на запрос в электромотор-генератор 20 касательно целевого крутящего момента, инструктированного из единого модуля 60 управления. Чтобы управлять инвертором 35 при этой частоте возбуждения, разрядный ток аккумулятора 30 протекает из аккумулятора 30 в инвертор 35.
Если определенное напряжение аккумулятора 30 выше нижнего предельного напряжения, ток, соответствующий заданной частоте возбуждения, разряжается из аккумулятора 30. Иными словами, без ограничения мощности аккумулятора 30 рамками предельных напряжений, модуль 601 управления напряжением дает возможность подавать мощность из аккумулятора 30 в инвертор 35. С другой стороны, когда определенное напряжение аккумулятора 30 понижается и достигает нижнего предельного напряжения, модуль 601 управления напряжением не разряжает ток, соответствующий частоте возбуждения, из аккумулятора 30, а ограничивает разрядный ток из аккумулятора 30, чтобы тем самым управлять определенным напряжением аккумулятора 30 таким образом, что оно не опускается ниже нижнего предельного напряжения. Кроме того, когда определенное напряжение аккумулятора 30 дополнительно снижается и опускается ниже нижнего предельного напряжения, модуль 601 управления напряжением дополнительно ограничивает ток, разряжаемый из аккумулятора 30. Другими словами, модуль управления напряжением 301 не накладывает ограничение на выводимую или доступную выходную мощность аккумулятора 30, когда определенное напряжение аккумулятора 30 выше нижнего предельного значения, и выводит мощность, соответствующую частоте возбуждения инвертора, из аккумулятора 30. С другой стороны, когда определенное напряжение аккумулятора 30 равно или ниже нижнего предельного напряжения, в таком случае мощность аккумулятора 30 должна быть ограничена, и должна выводиться мощность, которая ниже доступной мощности для аккумулятора 30. Таким образом, модуль 601 управления напряжением управляет выводом аккумулятора 30 посредством сравнения определенного напряжения аккумулятора 30 с нижним предельным напряжением в качестве ограничивающего напряжения и в соответствии с результатами сравнения.
При заряде аккумулятора 30 за счет работы в рекуперативном режиме электромотора-генератора 20 модуль 601 управления напряжением управляет входным напряжением аккумулятора 30 в соответствии с результатом сравнения между определенным напряжением аккумулятора 30 и верхним предельным напряжением. Другими словами, когда определенное напряжение аккумулятора 30 ниже верхнего предельного напряжения, модуль 601 управления напряжением вообще не накладывает ограничений на мощность, извлекаемую из работы в рекуперативном режиме электромотора-генератора и подаваемую в аккумулятор 30. Когда определенное напряжение аккумулятора 30 достигает верхнего предельного напряжения, модуль 601 управления напряжением выполняет такое управление, чтобы понижать зарядное напряжение в аккумуляторе 30, чтобы тем самым накладывать ограничение на мощность вследствие рекуперации электромотора-генератора 20 при управлении входной мощностью аккумулятора 30.
На основе состояния аккумулятора 30 модуль 602 управления мощностью обращается к заранее сохраненной карте и вычисляет вывод аккумулятора 30, а затем управляет выводом аккумулятора 30 таким образом, что вывод, соответствующий частоте возбуждения инвертора, может выводиться из аккумулятора 30 в инвертор 35. Модуль 602 управления мощностью использует состояние заряда (SOC) аккумулятора 30, температуру аккумулятора 30 и степень ухудшения характеристик аккумулятора 30 и т.д. как представляющие состояние аккумулятора 30. SOC аккумулятора 30 может быть вычислено посредством тока и напряжения, определенных посредством датчика тока и датчика 31 напряжения, соответственно, в то время как температура аккумулятора 30 может определяться посредством температурного датчика 32. Карта, сохраненная в модуле 602 управления мощностью, связывает выходную мощность аккумулятора 30 относительно SOC, температуры аккумулятора 30 и ухудшения характеристик. Помимо этого, модуль 602 управления мощностью обращается к сохраненной карте для вычисления выходной мощности аккумулятора 30 на основе вычисленного SOC и определенной температуры.
Здесь выходная мощность, вычисленная со ссылкой на карту посредством модуля 602 управления мощностью, указывает мощность, которая может выводиться или доступна из аккумулятора 30 (например, значение за две секунды) в течение предварительно определенного времени (например, две секунды). Следовательно, когда из аккумулятора 30 требуется мощность, которая превышает мощность, вычисленную посредством модуля 602 управления мощностью, управление выполняется посредством модуля 602 управления мощностью таким образом, чтобы не выводить мощность, превышающую вычисленную мощность из аккумулятора 30. Помимо этого, модуль 602 управления мощностью использует карту для вычисления мощности, которая может выводиться в течение предварительно определенного времени. Таким образом, когда вычисленная мощность требуется в течение времени, превышающего предварительно определенное время, может возникать такая ситуация, что вычисленная мощность не выводится из аккумулятора 30.
Модуль 603 запуска двигателя внутреннего сгорания приводит в действие двигатель 10 на основе пускового сигнала для того, чтобы запускать двигатель 10, посредством приведения в действие электромотора-генератора 20 через модуль 80 управления электромотором. Когда включен переключатель зажигания (не показан), пусковой сигнал для того, чтобы запускать двигатель 10, передается из переключателя для приема посредством модуля 80 управления электромотором. Помимо этого, модуль 603 запуска двигателя внутреннего сгорания также запускает двигатель 10 при переходе из EV-режима приведения в движение в HEV-режим приведения в движение и при переходе из EV-режима приведения в движение в режим, в котором транспортное средство приводится в движение только посредством двигателя. Следует отметить, что переключение режима приведения в движение управляется посредством единого модуля 60 управления в зависимости от открытия акселератора и скорости транспортного средства.
Модуль 604 задания частоты вращения задает частоту вращения электромотора-генератора 20 при проворачивании, чтобы запускать двигатель 10. Помимо этого, модуль 604 задания частоты вращения понижает частоту вращения электромотора-генератора 20 и тем самым понижает мощность, необходимую для того, чтобы запускать двигатель 10, когда значение мощности (мгновенное значение), вычисленное посредством модуля 601 управления напряжением, ниже мощности, необходимой для того, чтобы запускать двигатель 10.
Далее приводится описание управления при запуске двигателя 10 со ссылкой на фиг.1 и 4. Во-первых, единый модуль 60 управления, в ответ на прием пускового сигнала для того, чтобы запускать двигатель 10 из состояния, в котором SOC аккумулятора 30 является низким, и в остановленном состоянии транспортного средства, управляет мощностью аккумулятора 30 посредством модуля 601 управления напряжением. Помимо этого, единый модуль 60 управления определяет температуру аккумулятора 30 посредством температурного датчика 32. С помощью единого модуля 60 управления задается пороговая температура для переключения нижнего предельного напряжения. Дополнительно, когда температура аккумулятора 30 выше нижней предельной температуры, модуль 601 управления напряжением управляет аккумулятором 30 без понижения ранее заданного нижнего предельного напряжения, тогда как при температуре аккумулятора 30 ниже пороговой температуры для переключения нижнего предельного напряжения модуль 601 управления напряжением управляет аккумулятором 30 посредством снижения ранее заданного нижнего предельного напряжения.
Здесь следует отметить, что когда температура аккумулятора 30 ниже пороговой температуры для переключения нижнего предельного напряжения, в качестве характеристики аккумулятора 30, IV-характеристики (вольт-амперные характеристики) указывают характеристику с убывающей выпуклой формой. Следовательно, когда выходное напряжение аккумулятора понижается, разрядный ток аккумулятора 30 является даже более высоким, так что мощность аккумулятора 30, которая соответствует произведению напряжения и тока, выше мощности до понижения напряжения.
С другой стороны, когда температура аккумулятора 30 выше пороговой температуры (к примеру, в состоянии температуры в салоне), понижение выходного напряжения аккумулятора 30 приводит к более высокому уровню мощности аккумулятора 30, при этом увеличение величины мощности является небольшим по сравнению с состоянием, в котором температура аккумулятора 30 является низкой. Помимо этого, даже если диапазон напряжений гарантирует безопасность аккумулятора 30, когда аккумулятор 30 разряжается при низкой температуре, то ускоряется ухудшение характеристик аккумулятора 30. Таким образом, пороговая температура выбирается в качестве температуры, при которой увеличение мощности предполагается посредством понижения напряжения с учетом соответствующих характеристик аккумулятора 30. Следовательно, когда температура аккумулятора 30 выше пороговой температуры, модуль 601 управления напряжением не уменьшает нижнее предельное напряжение. Таким образом, не допускается сокращение времени работы от аккумулятора 30. Когда температура аккумулятора 30 ниже пороговой температуры, модуль 601 управления напряжением может повышать мощность аккумулятора 30 посредством понижения нижнего предельного напряжения.
Дополнительно, модуль 601 управления напряжением вычисляет значение мгновенно выводимой или доступной мощности (мгновенное значение) с помощью аккумулятора 30 на основе определенного напряжения датчика 31 напряжения и тока, который может быть разряжен из аккумулятора 30, и сравнивает значение мощности (мгновенное значение), вычисленное посредством вычисления, и мощность, необходимую для того, чтобы запускать двигатель 10. Когда вычисленное значение мощности (мгновенное значение) выше мощности, необходимой для того, чтобы запускать двигатель 10, модуль 601 управления напряжением подает мощность аккумулятора 30 в электромотор-генератор 20, и модуль 603 запуска двигателя внутреннего сгорания зацепляет муфту 15, чтобы тем самым запускать двигатель 10. С другой стороны, когда вычисленная мощность ниже мощности, необходимой для того, чтобы запускать двигатель 10, модуль 604 задания вращения понижает частоту вращения электромотора таким образом, чтобы обеспечивать возможность для значения мощности (мгновенного значения) быть выше мощности, необходимой для того, чтобы запускать двигатель 10, в таком случае модуль 601 запуска двигателя внутреннего сгорания зацепляет муфту 15, чтобы запускать двигатель 10.
Модуль 80 управления электромотором задает частоту возбуждения так, чтобы запускать двигатель 10, и управляет инвертором 35. Дополнительно, когда определенное напряжение аккумулятора 30 выше нижнего предельного напряжения, модуль 601 управления напряжением не накладывает ограничение на мощность аккумулятора 30, так что мощность должна выводиться в соответствии с заданной частотой возбуждения.
Если возгорание или вспышки в двигателе завершены полностью до того, как напряжение аккумулятора 30 достигнет нижнего предельного напряжения, поскольку рекуперация посредством электромотора-генератора 20 с использованием мощности двигателя 10 теперь может быть использована для того, чтобы заряжать аккумулятор 30, напряжение аккумулятора 30 может поддерживаться выше нижнего предельного напряжения. С другой стороны, в ответ на проворачивание двигателя 10 и, как следствие, снижение напряжения аккумулятора так, что оно достигает нижнего предельного напряжения, модуль 601 управления напряжением ограничивает выходную мощность из аккумулятора 30 и выполняет управление таким образом, что напряжение аккумулятора 30 не должно опускаться ниже значения нижнего напряжения. В этом случае, поскольку двигатель 10 уже проворачивается, двигатель 10 может непрерывно проворачиваться даже на мощности, необходимой для того, чтобы запускать двигатель 10.
В этой связи, в случае запуска двигателя 10 посредством управления мощностью с использованием карты, модуль 602 управления мощностью вычисляет выводимую или потенциальную мощность (значение за несколько секунд), которая доступна в течение предварительно определенного времени, как описано выше. Следовательно, несмотря на случай, в котором значение мощности (мгновенное значение), которое доступно моментально или мгновенно, выше требуемой мощности, поскольку значение мощности (значение за несколько секунд) ниже требуемой мощности, имеется вероятность того, что целевая частота вращения электромотора принудительно понижается больше, чем требуется. По мере того как уменьшается целевая частота вращения электромотора, требуемая длительность увеличивается до момента, когда сгорание в двигателе 10 будет полностью выполняться от момента проворачивания. Таким образом, снижается надежность запуска двигателя и возрастает время для завершения запуска двигателя. Разумеется, когда время продлевается вплоть до завершения запуска двигателя, значение мощности (значение за несколько секунд), вычисленное посредством модуля 602 управления мощностью, может не выводиться в двигатель 10 на непрерывной основе до завершения запуска двигателя. Помимо этого, в случае, в котором частота вращения для запуска двигателя 10 задается ниже посредством модуля 604 задания частоты вращения, несомненно, что объем впрыска топлива должен быть больше до полного сгорания или самоподдержания или автономного вращения при сниженной надежности запуска двигателя, еще труднее точно выяснять требуемое время до полного сгорания. Следовательно, снижается точность, с которой можно оценивать мощность, требуемую для того, чтобы запускать двигатель 10.
Дополнительно, посредством датчиков для управления транспортным средством, используемых при управлении мощностью посредством модуля 602 управления мощностью, или CPU, например, используемого в едином модуле 60 управления, состояние аккумулятора 30 не обязательно может точно оцениваться, так что вычисленная мощность может отличаться от фактически доступной мощности с использованием аккумулятора 30, или фактически доступный период вывода аккумулятора, возможно, превышает предварительно определенный период вычисленного значения мощности. Следовательно, снижается точность вычисленной мощности относительно фактической выходной мощности аккумулятора 30.
Более конкретно, при запуске двигателя 10 через управление мощностью частота вращения электромотора задается равной существенно более низкой частоте, либо двигатель фактически не может быть запущен, несмотря на вычисление, прогнозирующее успешный запуск.
Как описано выше, поскольку двигатель 10 запускается посредством вывода аккумулятора 30, который управляется посредством модуля 601 управления напряжением, двигатель 10 может быть запущен посредством подачи фактически доступной мощности с помощью аккумулятора 30 в электромотор-генератор 20 до тех пор, пока напряжение аккумулятора 30 не достигнет нижнего предельного напряжения. В настоящем варианте осуществления в ответ на операцию включения переключателя зажигания водителем, чтобы запускать двигатель 10, например, управление мощностью аккумулятора 30 посредством модуля 602 управления мощностью запрещается, в то время как вывод аккумулятора управляется только посредством модуля 601 управления напряжением, чтобы тем самым запускать двигатель 10.
Дополнительно, через управление напряжением, на основе сравнения между значением мощности (мгновенным значением) и значением требуемой мощности и посредством выполнения задания частоты вращения посредством модуля 604 задания частоты вращения, не допускается задание частоты вращения электромотора-генератора 20 для запуска двигателя 10 существенно ниже необходимой. Таким образом, посредством выполнения задания частоты вращения посредством значения мощности (мгновенного значения) при управлении выводом в рамках диапазона между верхним и нижним предельными напряжениями, может быть значительно повышена надежность запуска двигателя.
Далее со ссылкой на фиг.5a и 5b описываются управляющие процедуры системы управления в гибридном транспортном средстве в настоящем варианте осуществления. Фиг.5a и 5b показывают блок-схемы последовательности операций способа, соответственно, показывающие управляющую процедуру в системе управления гибридным транспортным средством.
После начала работы настоящей системы управления на этапе S1 водитель включает переключатель зажигания, и единый модуль 60 управления принимает пусковой сигнал для того, чтобы запускать двигатель 10. На этапе S2 единый модуль 60 управления управляет выводом аккумулятора 30 посредством модуля 601 управления напряжением. На этапе S3 модуль 601 управления напряжением определяет напряжение разомкнутой цепи через аккумулятор 30 посредством использования датчика 31 напряжения, чтобы сравнивать с предварительно определенным пороговым напряжением (Vx). Предварительно определенное пороговое напряжение (Vx) задается заранее для защиты аккумулятора 30. Когда напряжение разомкнутой цепи аккумулятора 30 выше порогового напряжения (Vx), управление переходит к этапу S4. С другой стороны, когда напряжение разомкнутой цепи аккумулятора 10 ниже порогового напряжения (Vx), модуль 601 управления напряжением отказывается запускать двигатель 10 на этапе S31, но зажигает лампу аварийной сигнализации (не показана) и тем самым выдает оповещение пассажиру.
На этапе S4 единый модуль 60 управления сравнивает определенную температуру (T) аккумулятора 30, которая определяется посредством температурного датчика 32, и пороговую температуру (TL), заданную заранее. Когда определенная температура (T) равна или превышает пороговое значение (TL), управление переходит к этапу S41 на фиг.5b. С другой стороны, при определенной температуре (T) ниже пороговой температуры (TL) управление переходит к этапу S5.
Во-первых, приводится описание управляющей процедуры после этапа S5. На этапе S5 единый модуль 60 управления задает ранее заданное нижнее предельное напряжение (VL) равным нижнему предельному напряжению (VL1), меньшему нижнего предельного напряжения (VL). Следует отметить, что нижнее предельное напряжение (VL) представляет такое значение нижнего предельного напряжения, при котором аккумулятор 30 может быть использован безопасно в нормальном температурном режиме, в котором температура аккумулятора 30 выше пороговой температуры TL. Помимо этого, нижнее предельное напряжение (VL1) представляет такое значение нижнего предельного напряжения, при котором аккумулятор 30 может быть использован безопасно в режиме низкой температуры, в котором температура аккумулятора 30 ниже нижней предельной температуры (TL).
На этапе S6 модуль 601 управления напряжением подает в аккумулятор 30 мощность, необходимую для запуска двигателя 10, и модуль 603 запуска двигателя внутреннего сгорания проворачивает двигатель 10. На этапе S7 единый модуль 60 управления определяет, на основе сигнала, передаваемого из модуля 70 управления двигателем, то, активирован или нет флаг полного сгорания, указывающий полное или самостоятельное сгорание. Модуль 70 управления двигателем управляет состоянием двигателя 10 на основе частоты вращения двигателя 10. Когда частота вращения двигателя 10 выше предварительно определенной частоты вращения, при которой допускается полное сгорание, в таком случае модуль 70 управления двигателем активирует флаг полного сгорания, в то время как при частоте вращения ниже пороговой частоты вращения, при которой устанавливается полное сгорание или вспышки, модуль 70 управления двигателем деактивирует флаг полного сгорания.
Когда флаг полного сгорания находится в деактивированном состоянии, на этапе S71 единый модуль 60 управления определяет то, истекло или нет предварительно определенное время после приема пускового сигнала. Когда предварительно определенное время истекло (тайм-аут), завершается управление по настоящему варианту осуществления. Таким образом, когда сгорание в двигателе не может полностью выполняться и он не может работать автономно, то разряд из аккумулятора 30 будет запрещен. С другой стороны, если предварительно определенное время не истекло, управление переходит к этапу S72. На этапе S72 модуль 601 управления напряжением сравнивает определенное напряжение аккумулятора 30 с нижним предельным напряжением (VL1). Когда определенное напряжение превышает нижнее предельное напряжение (VL1), модуль 601 управления напряжением продолжает подавать текущую выходную мощность в электромотор-генератор 20, тем самым проворачивая коленчатый вал двигателя 10, и управление возвращается к этапу S6. С другой стороны, когда определенное напряжение ниже нижнего предельного напряжения (VL1) или когда определенное напряжение понижается и достигает нижнего предельного напряжения (VL1), модуль 601 управления напряжением понижает мощность аккумулятора 30 и управляет аккумулятором 30 таким образом, чтобы повышать напряжение аккумулятора 30 до значения выше нижнего предельного напряжения (VL1), и управление возвращается к этапу S7.
Когда флаг полного сгорания активирован на этапе S7, единый модуль 60 управления далее управляет мощностью аккумулятора 30 посредством модуля 602 управления мощностью. Таким образом, в ходе приведения в движение транспортного средства выполняется управление посредством модуля 602 управления мощностью, чтобы тем самым стабилизировать поведение транспортного средства. На этапе S9 единый модуль 60 управления сравнивает определенное напряжение аккумулятора 30 с нижним предельным напряжением (VL). Более конкретно, выполняется определение в отношении того, превышает или нет определенное напряжение аккумулятора 30 нижнее предельное напряжение (VL), до задания его равным нижнему предельному напряжению (VL1) на этапе S5. На этапе S91, когда определенное напряжение аккумулятора 30 ниже нижнего предельного напряжения (VL), аккумулятор 30 заряжается, и управление возвращается к этапу S8. Когда аккумулятор 30 используется непрерывно в течение длительного времени при низком напряжении, ускоряется ухудшение характеристик. Следовательно, после того как сгорание в двигателе проходит до конца или полностью, аккумулятор 30 заряжается посредством использования мощности двигателя 10, чтобы повышать напряжение аккумулятора 30. Следует отметить, что напряжение аккумулятора 30 может быть выше нижнего предельного напряжения (VL) вследствие прекращения разрядной нагрузки, прикладываемой к аккумулятору 30, процесс управления на этапе S91, следовательно, не обязательно требуется, но такое управление может быть выполнено для того, чтобы не прикладывать разрядную нагрузку к аккумулятору 30. Когда определенное напряжение аккумулятора 30 выше нижнего предельного напряжения (VL), единый модуль управления возвращает нижнее предельное напряжение (VL1) к нижнему предельному напряжению (VL) (этап S10), и завершается управление по настоящему варианту осуществления.
Затем, на этапе S4 в случае, в котором определенная температура (T) равна или превышает пороговую температуру (TL), управляющая программа или процедура после этапа S41 далее описывается со ссылкой на фиг.5b. На этапе S41 модуль 601 управления напряжением сравнивает мощность, необходимую для того, чтобы запускать двигатель 10, с выходной мощностью (мгновенным значением) аккумулятора 30. Когда выходная мощность (мгновенное значение) аккумулятора 30 превышает требуемую выходную мощность, управление переходит к этапу S43. С другой стороны, когда выходная мощность (мгновенное значение) ниже требуемой мощности, в таком случае модуль 604 задания частоты вращения понижает частоту вращения электромотора-генератора 20 для запуска двигателя 10 на этапе S42. Таким образом, мощность, требуемая для запуска двигателя 10, является более низкой. Следует отметить, что модуль 604 задания частоты вращения может понижать частоту вращения ступенчато, или, альтернативно, модуль 604 задания частоты вращения может опускаться до частоты вращения, при которой требуемая мощность соответствует выходной мощности.
На этапе S43 модуль 601 управления напряжением подает мощность, требуемую для того, чтобы запускать двигатель 10, из аккумулятора 30, в то время как модуль 603 запуска двигателя внутреннего сгорания проворачивает двигатель 10. На этапе S44 единый контроллер 60 определяет то, активирован или нет флаг полного сгорания. В случае деактивации флага полного сгорания на этапе S441 единый модуль 60 управления определяет то, истек или нет тайм-аут. При подтверждении тайм-аута завершается управление согласно настоящему варианту осуществления. Таким образом, когда сгорание в двигателе не завершается посредством вывода аккумулятора 30, разряд из аккумулятора 30 запрещается. Если тайм-аут не истек, на этапе S442 модуль 601 управления напряжением сравнивает определенное напряжение аккумулятора 30 с нижним предельным напряжением (VL). Когда определенное напряжение превышает нижнее предельное напряжение (VL), модуль 601 управления напряжением непрерывно подает текущую выходную мощность в электромотор-генератор 20 и еще проворачивает двигатель 10, и управление возвращается к этапу S44. С другой стороны, когда определенное напряжение ниже нижнего предельного напряжения (VL) или когда определенное напряжение понижается таким образом, что оно достигает нижнего предельного напряжения (VL), в таком случае модуль 601 управления напряжением понижает мощность аккумулятора 30 (этап S443), управляет аккумулятором 30 таким образом, что напряжение на аккумуляторе 30 выше нижнего предельного напряжения (VL), и управление возвращается к этапу S44.
Когда флаг полного сгорания активирован на этапе S44, на этапе S45 единый контроллер 60 управляет мощностью аккумулятора 30 посредством модуля 602 управления мощностью и завершает управление по настоящему варианту осуществления.
Как описано выше, в настоящем варианте осуществления модуль 601 управления напряжением управляет выводом аккумулятора 30 в соответствии с результатом сравнения между определенным напряжением датчика 31 напряжения и предельным напряжением аккумулятора 30, и в соответствии с выводом аккумулятора 30, управляемым посредством модуля 601 управления напряжением, инвертор 35 управляется таким образом, чтобы запускать двигатель 10. Таким образом, аккумулятор 30 может управляться в безопасном диапазоне напряжений, чтобы тем самым запускать двигатель, и мощность может эффективно выводиться до предельного значения напряжения аккумулятора 30. Как результат, может быть расширен диапазон применения состояния аккумулятора. Помимо этого, посредством продолжения управления напряжением при отказе в управлении мощностью, полная энергия аккумулятора 30 может использоваться для операции проворачивания коленчатого вала и тем самым может дополнять условия разрешения запуска двигателя 10.
Кроме того, в настоящем варианте осуществления, при запуске двигателя 10, вывод аккумулятора 30 управляется посредством модуля 601 управления напряжением, и управление выводом аккумулятора посредством модуля 602 управления мощностью запрещается, так что модуль 602 управления мощностью не выполняет управление мощностью. Следовательно, при запуске двигателя 10 задание частоты вращения является возможным посредством использования значения выходной мощности (мгновенного значения), доступного с помощью аккумулятора мгновенно или немедленно, что должно приводить к более высокой вероятности полного сгорания в двигателе 10. Помимо этого, даже при возросшем времени между проворачиванием двигателя 10 и полным сгоранием, аккумулятор 30 может предоставлять фактически доступную или выводимую мощность вплоть до полного сгорания на непрерывной основе в рамках диапазона верхних и нижних пределов.
Дополнительно в настоящем варианте осуществления, когда определенное напряжение аккумулятора 30 ниже нижнего предельного напряжения (VL или VL1), ограничивается вывод аккумулятора 30. Таким образом, может не допускаться то, что определенное напряжение дополнительно понижается до избыточно разряженного состояния аккумулятора.
Помимо этого, когда вывод мощности из аккумулятора 30 ниже мощности, требуемой для запуска двигателя 10, уменьшается частота вращения электромотора-генератора для запуска двигателя 10. Таким образом, может быть понижена мощность, требуемая для запуска двигателя 10, и, таким образом, двигатель 10 может проворачиваться.
Дополнительно, когда определенная температура аккумулятора 30, определенная посредством температурного датчика 32, ниже порогового значения (TL), модуль 601 управления напряжением задает нижнее предельное напряжение (VL) равным нижнему предельному напряжению (VL1). Таким образом, при меньшей температуре аккумулятора 30, посредством понижения нижнего предельного напряжения (VL) может повышаться вывод аккумулятора 30. Как результат, может быть расширен диапазон применения состояния аккумулятора 30.
Кроме того, в настоящем варианте осуществления, после понижения нижнего предельного напряжения до нижнего предельного напряжения (VL1), когда напряжение аккумулятора 30 выше нижнего предельного напряжения (VL), управление возвращает нижнее предельное напряжение (VL1) к нижнему предельному напряжению (VL). Таким образом, в рамках диапазона низкого напряжения, можно не допускать использования аккумулятора 30 в течение длительного времени в области нижнего напряжения, так что может быть реализована защита аккумулятора 30.
Помимо этого, в настоящем варианте осуществления в ответ на прием пускового сигнала для того, чтобы запускать двигатель 10, модуль 601 управления напряжением управляет аккумулятором 30, а при приеме сигнала, указывающего полное сгорание двигателя 10, модуль 602 управления мощностью управляет аккумулятором 30.
Следовательно, при запуске двигателя 10 мощность может извлекаться вплоть до нижнего предельного напряжения аккумулятора 30, так что может быть расширен диапазон применения аккумулятора 30. Кроме того, после полного сгорания в двигателе 10 напряжение аккумулятора 30 может повышаться посредством мощности двигателя 10, так что даже при управлении мощностью напряжение аккумулятора 30 может поддерживаться в безопасном диапазоне напряжений. Таким образом, аккумулятор 30 защищается при продлении времени работы от аккумулятора и стабилизации работы транспортного средства.
Помимо этого, в настоящем варианте осуществления, когда сгорание в двигателе не может выполняться полностью посредством вывода аккумулятора 30, запрещается разряд из аккумулятора 30. Таким образом, не допускается избыточный разряд аккумулятора 30.
Следует отметить, что в настоящем варианте осуществления, после того как сгорание в двигателе 10 полностью выполняется, модуль 602 управления мощностью может управлять аккумулятором 30 совместно с управлением посредством модуля 601 управления напряжением. Помимо этого, в настоящем варианте осуществления, в ответ на включение переключателя зажигания водителем и прием посредством управления пускового сигнала для того, чтобы запускать двигатель 10, осуществляется управление напряжением посредством модуля 601 управления напряжением. Тем не менее, в ходе приведения в движение транспортного средства, при запуске двигателя во время перехода из EV-режима приведения в движение в HEV-режим приведения в движение или, альтернативно, из EV-режима приведения в движение в режим приведения в движение только за счет двигателя, такое управление напряжением может выполняться посредством модуля 601 управления напряжением. Помимо этого, в состоянии, в котором транспортное средство остановлено на светофоре и т.д., например, при запуске двигателя 10, модуль 601 управления напряжением может выполнять управление напряжением. Помимо этого, только тогда, когда переключатель зажигания включается водителем и принимается пусковой сигнал для того, чтобы запускать двигатель, может быть выполнено управление напряжением посредством модуля 601 управления напряжением.
Дополнительно, в настоящем варианте осуществления перед приемом пускового сигнала для того, чтобы запускать двигатель 10, когда выполнено управление мощностью посредством модуля 602 управления мощностью, при приеме пускового сигнала для того, чтобы запускать двигатель, может быть выполнено переключение с управления мощностью на управление напряжением посредством модуля 601 управления напряжением.
Дополнительно, относительно определения напряжения посредством датчика 32 напряжения, когда множество единичных элементов включаются в аккумулятор 30, модуль 80 управления электромотором может отслеживать напряжения соответствующих элементов и полное напряжение аккумуляторного источника питания, содержащего множество единичных элементов. В этом случае предельное напряжение может предоставляться относительно напряжения каждого элемента и напряжения всего аккумуляторного источника соответственно. При управлении множеством напряжений аккумуляторных элементов и напряжением всего аккумуляторного источника питания на этапе S4 может быть понижено нижнее предельное напряжение каждого элемента, либо такое нижнее предельное напряжение должно быть понижено относительно элемента, показывающего нижнее напряжение.
Относительно управляющей процедуры в модуле управления этого варианта осуществления строгая совместимость с процедурами, показанными на фиг.5, не требуется, и каждый этап может быть заменен, либо некоторые этапы могут опускаться.
Следует отметить, что на этапе S71 и S441, когда управление завершается вследствие тайм-аута, повторяющиеся операции запуска двигателя 10 могут приводить к избыточному разряду аккумулятора 30. Следовательно, например, при попытке запускать двигатель 10 предварительно определенное число раз без успешного запуска двигателя, может быть выполнено такое управление, чтобы отказывать в перезапуске.
Помимо этого, когда напряжение аккумулятора 30 ниже предварительно определенного напряжения, можно обоснованно отказывать в операции перезапуска. Может задаваться предварительно определенное напряжение, при котором нагрузка должна прикладываться к аккумулятору за счет перезапуска двигателя, и аккумулятор 30 должен избыточно разряжаться.
Вышеописанный двигатель 10 соответствует двигателю внутреннего сгорания согласно настоящему изобретению, электромотор-генератор 20 соответствует электромотору согласно настоящему изобретению, первая муфта CL1 соответствует муфте согласно настоящему изобретению, датчик 31 напряжения соответствует модулю определения напряжения согласно настоящему изобретению. Модуль 601 управления напряжением соответствует модулю управления напряжением, модуль 602 управления мощностью соответствует модулю управления мощностью, модуль 603 запуска двигателя внутреннего сгорания соответствует модулю запуска двигателя внутреннего сгорания, модуль 604 задания частоты вращения соответствует модулю задания частоты вращения, температурный датчик 32 соответствует модулю определения температуры. Нижнее предельное напряжение (VL) соответствует первому нижнему пределу напряжения согласно настоящему изобретению, в то время как нижнее предельное напряжение (VL1) соответствует второму нижнему предельному напряжению согласно настоящему изобретению.
Перечень ссылочных позиций
1 - гибридное транспортное средство
10 - двигатель
15 - первая муфта
20 - электромотор-генератор
25 - вторая муфта
30 - аккумулятор
35 - инвертор
40 - автоматическая трансмиссия
60 - интегрированный модуль управления
601 - модуль управления напряжением
602 - модуль управления мощностью
603 - модуль запуска двигателя внутреннего сгорания
604 - модуль задания частоты вращения
70 - модуль управления двигателем
80 - модуль управления электромотором
90 - модуль управления трансмиссией
Изобретение относится к управлению гибридным транспортным средством. Система управления гибридным транспортным средством содержит модуль определения напряжения аккумулятора; модуль управления напряжением в рамках диапазона заданного предельного напряжения; модуль управления мощностью, который вычисляет второе значение мощности, доступное стабильно от текущего времени в течение предварительно определенного времени, на основе состояний аккумулятора и в соответствии с результатами вычисления управляет выводом аккумулятора. Также имеется модуль запуска двигателя внутреннего сгорания, который зацепляет муфту и запускает двигатель посредством управления инвертором, и модуль задания частоты вращения электромотора при запуске двигателя. При запуске двигателя модуль задания частоты вращения, когда первое значение мощности ниже значения мощности запуска двигателя, понижает частоту вращения. Модуль управления мощностью не допускает управление выводом аккумулятора в соответствии со вторым значением мощности. Повышается надежность запуска двигателя. 5 з.п. ф-лы, 6 ил.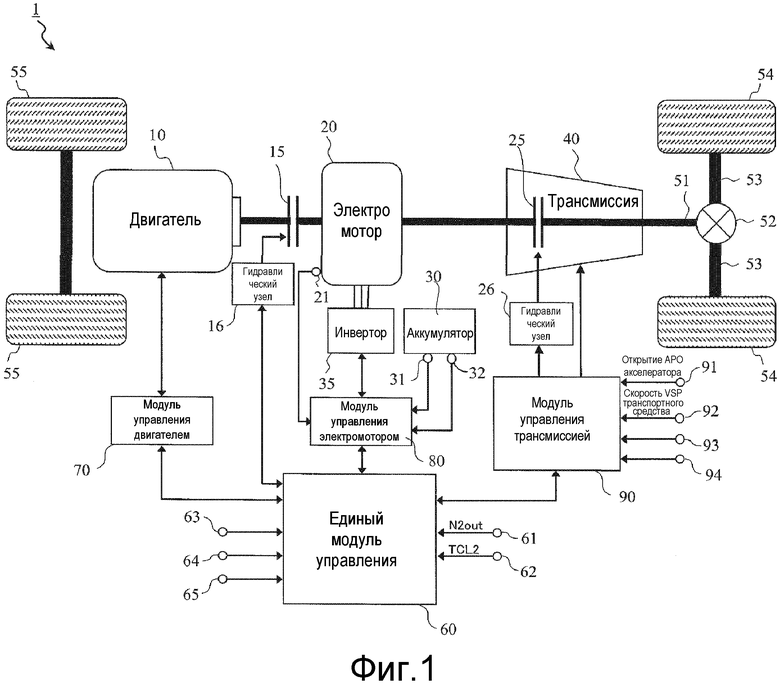
1. Система управления гибридным транспортным средством, включающим в себя двигатель внутреннего сгорания, электромотор для запуска двигателя внутреннего сгорания, инвертор для управления электромотором, муфту для избирательного подключения и отключения передачи мощности между двигателем внутреннего сгорания и электромотором и аккумулятор для подачи электроэнергии в электромотор, содержащая
модуль определения напряжения, который определяет напряжение аккумулятора;
модуль управления напряжением, который управляет напряжением аккумулятора в рамках диапазона заданного предельного напряжения и вычисляет текущее доступное первое значение мощности аккумулятора на основе напряжения аккумулятора, определяемого посредством модуля определения напряжения;
модуль управления мощностью, который вычисляет второе значение мощности, доступное стабильно от текущего времени в течение предварительно определенного времени, на основе состояний аккумулятора и в соответствии с результатами вычисления управляет выводом аккумулятора;
модуль запуска двигателя внутреннего сгорания, который зацепляет муфту и запускает двигатель внутреннего сгорания посредством управления инвертором на основе вывода аккумулятора, который управляется посредством модуля управления напряжением; и
модуль задания частоты вращения, который задает частоту вращения электромотора при запуске двигателя внутреннего сгорания,
при этом при запуске двигателя внутреннего сгорания модуль задания частоты вращения, когда первое значение мощности ниже значения мощности, необходимого для того, чтобы запускать двигатель внутреннего сгорания, понижает частоту вращения, заданную таким образом, что первое значение мощности выше требуемого значения,
причем модуль управления мощностью не допускает управление выводом аккумулятора в соответствии со вторым значением мощности.
2. Система управления гибридным транспортным средством по п. 1, в которой модуль управления напряжением накладывает ограничение на вывод аккумулятора, когда определенное напряжение ниже нижнего предельного напряжения аккумулятора.
3. Система управления гибридным транспортным средством по п. 1 или 2, в которой
модуль управления напряжением управляет аккумулятором при приеме пускового сигнала для того, чтобы запускать двигатель внутреннего сгорания; и
модуль управления мощностью управляет аккумулятором при приеме сигнала, указывающего завершение сгорания в двигателе внутреннего сгорания.
4. Система управления гибридным транспортным средством по п. 1 или 2, дополнительно содержащая
модуль определения температуры, который определяет температуру аккумулятора,
при этом модуль управления напряжением задает и
переключается с первого нижнего предельного напряжения на второе нижнее предельное напряжение, меньше первого предельного напряжения, когда температура, определяемая посредством модуля определения температуры, ниже предварительно определенной температуры.
5. Система управления гибридным транспортным средством по п. 4, в которой модуль управления напряжением переключается со второго нижнего предельного напряжения на первое нижнее предельное напряжение, когда определенное напряжение модуля определения напряжения становится выше первого нижнего предельного напряжения после задания его равным второму нижнему предельному напряжению.
6. Система управления гибридным транспортным средством по п. 1 или 2, в которой модуль управления напряжением запрещает разряд из аккумулятора, когда завершение сгорания в двигателе внутреннего сгорания является невозможным.
| JP 2008062745 A, 21.03.2008 | |||
| JP 2010183785 A, 19.08.2010 | |||
| JP 2008273518 A, 13.11.2008 | |||
| JP 2010218976 A, 30.09.2010 |

