ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к тактовой синхронизации между устройствами связи и конкретно относится к точной тактовой синхронизации для устройств, осуществляющих связь в беспроводных сетях.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Стандарт IEEE 802.11 Института инженеров по электротехнике и радиоэлектронике (ИИЭР, IEEE) протокола беспроводной связи для беспроводных сетей определяет схему временной синхронизации для беспроводных станций в беспроводной сети. Беспроводная станция узла доступа (АР) может считывать часы системного времени при формировании маяка (beacon) и помещать информацию временной отметки в кадр-маяк.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
РЕШЕНИЕ ПРОБЛЕМЫ
Варианты осуществления настоящего изобретения обеспечивают способ и систему для протокола высокоточной тактовой синхронизации для связи между устройствами в системе связи, такой как система беспроводной связи, содержащая беспроводную сеть.
ПОЛОЖИТЕЛЬНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
Согласно вариантам осуществления настоящего изобретения при создании пакета уровнем управления доступом к среде передачи (MAC) в АР осуществляют формирование временной отметки пакета со временем локальных часов при поступлении пакета на физический (PHY) уровень АР для передачи по каналу, а не традиционное формирование временной отметки на уровне MAC в АР. Это уменьшает задержку обработки (то есть уменьшает задержку доступа в АР). Подобным образом часы станции (STA) считываются на уровне PHY STA, а не на уровне MAC, когда пакет принимается уровнем PHY STA. Кроме того, часы STA обновляются при необходимости на основании временной отметки принимаемого пакета. Это дополнительно уменьшает задержки обработки (то есть уменьшает задержку приема в STA).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - блок-схема системы беспроводной связи, реализующей временную синхронизацию, согласно варианту осуществления изобретения.
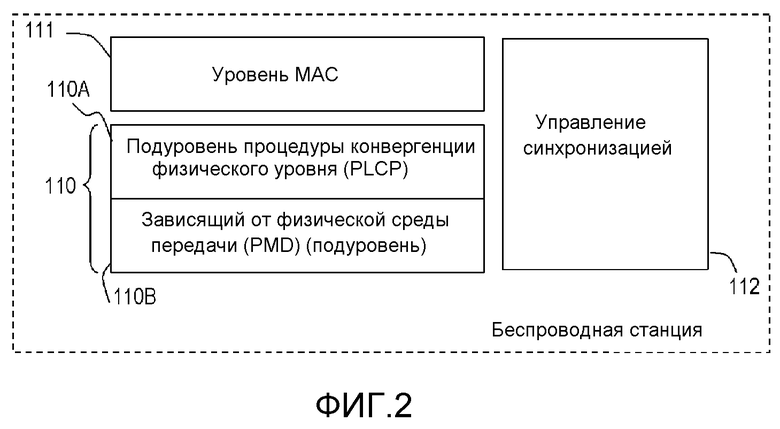
Фиг.2 - блок-схема уровня связи «физический» (PHY) и уровня связи «управление доступом к среде передачи» (MAC) в беспроводной станции, которая реализует тактовую синхронизацию (синхронизацию часов) в системе беспроводной связи, содержащей беспроводную локальную сеть, согласно вариантам осуществления настоящего изобретения.
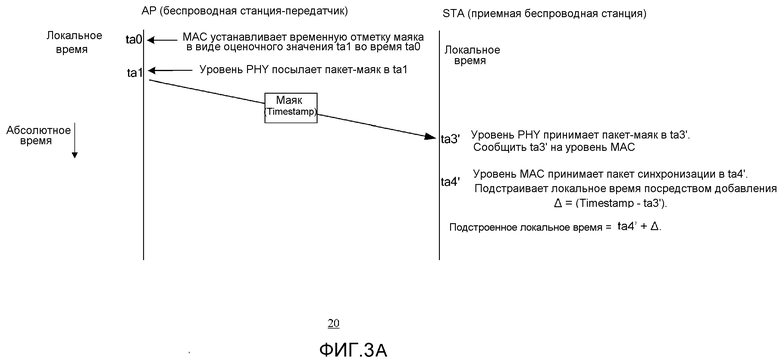
Фиг.3А - примерная временная диаграмма и последовательность операций, причем узел доступа передает пакет синхронизации, содержащий кадр-маяк, включающий в себя временную отметку, на приемную станцию в беспроводной локальной сети (БЛС, WLAN) согласно варианту осуществления изобретения.
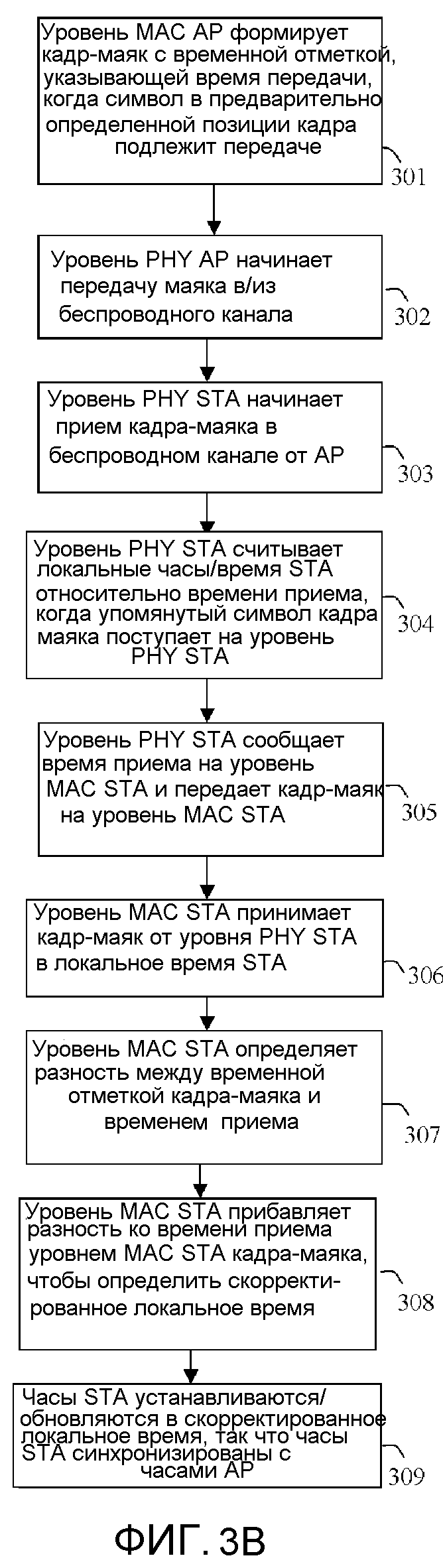
Фиг.3В - последовательность операций процесса для способа временной синхронизации согласно варианту осуществления настоящего изобретения.
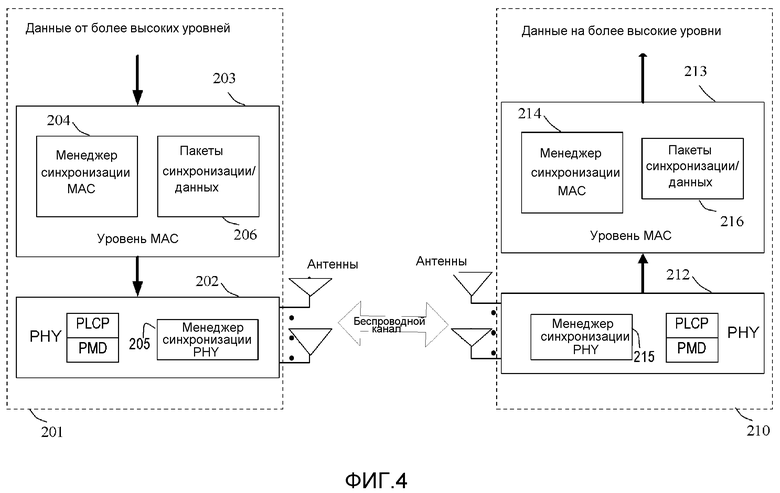
Фиг.4 - блок-схема беспроводной локальной сети, содержащей беспроводную станцию-передатчик и беспроводную станцию-приемник, реализующих временную синхронизацию, согласно варианту осуществления изобретения.
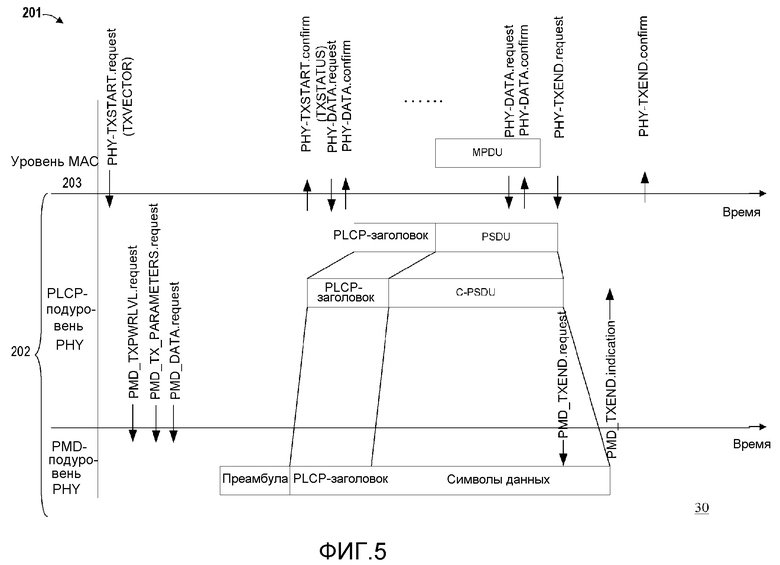
Фиг.5 - примерный процесс и временная диаграмма для взаимодействий между уровнем MAC и подуровнем процедуры (протокола) конвергенции физического уровня (PLCP), и затем - между PLCP-подуровнем PHY и подуровнем PHY, зависящим от физической среды передачи (PMD), для уровня PHY передающей станции, показанной на Фиг.4, для временной синхронизации согласно варианту осуществления изобретения.
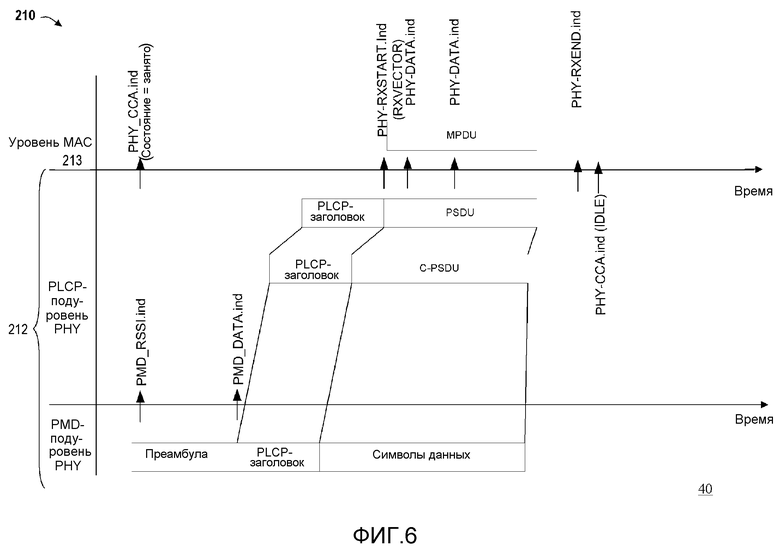
Фиг.6 - примерный процесс и временная диаграмма для взаимодействий между уровнем MAC и PLCP-подуровнем PHY, а также между PLCP-подуровнем PHY и PMD-подуровнем PHY, для уровня PHY приемной станции, показанной на Фиг.4, для временной синхронизации согласно варианту осуществления изобретения.
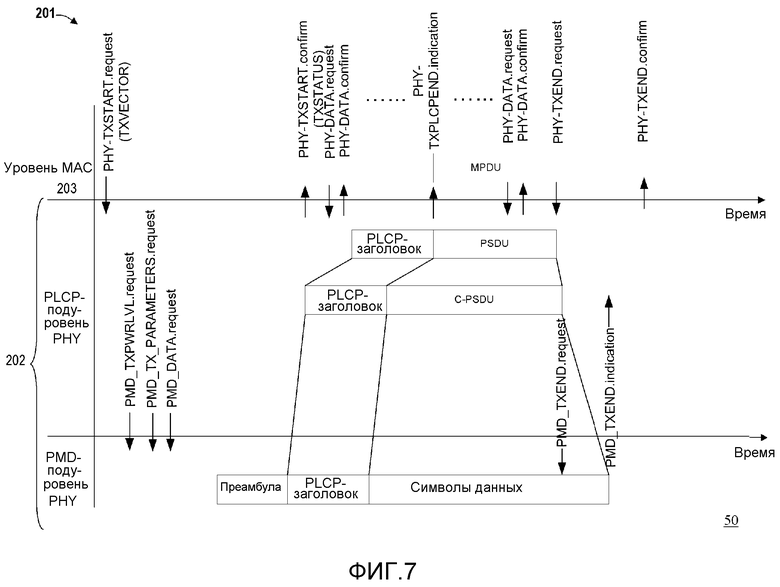
Фиг.7 - примерный процесс и временная диаграмма для взаимодействий между уровнем MAC и PLCP-подуровнем PHY, а также между PLCP-подуровнем PHY и PMD-подуровнем PHY, для уровня PHY станцией-передатчиком, показанной на Фиг.4, для временной синхронизации согласно варианту осуществления изобретения.
НАИЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения обеспечивают способ и систему для протокола высокоточной тактовой синхронизации для связи между устройствами в системе связи, такой как система беспроводной связи, содержащая беспроводную сеть. Варианты осуществления изобретения обеспечивают точную тактовую синхронизацию посредством взаимодействия между уровнями и подуровнями связи для сетей беспроводной связи.
В одном варианте осуществления настоящее изобретение обеспечивает способ для временной синхронизации в системе беспроводной связи, содержащий передачу кадра синхронизации от беспроводного передатчика на беспроводной приемник по среде беспроводной связи, причем кадр синхронизации включает в себя временную отметку, содержащую время передачи, указывающее локальное (внутреннее) для передатчика время, когда символ в предварительно определенной позиции кадра синхронизации помещается в среду беспроводной связи для передачи. Способ дополнительно включает в себя прием кадра синхронизации на физическом уровне приемника и определение времени приема, содержащего локальное для приемника время, когда упомянутый символ кадра синхронизации был принят из среды беспроводной связи на физическом уровне приемника. Способ дополнительно включает в себя предоставление принятого кадра синхронизации на более высокий уровень связи в приемнике, причем кадр синхронизации поступает на упомянутый более высокий уровень связи во время поступления, указывающее локальное время приемника, в которое кадр синхронизации поступил на упомянутый более высокий уровень. Способ дополнительно включает в себя временную синхронизацию приемника с передатчиком посредством определения разности между упомянутой временной отметкой и упомянутым временем приема и подстройки локального времени приемника упомянутой разностью, чтобы синхронизировать по времени приемник с передатчиком.
Эти и другие признаки, аспекты и преимущества настоящего изобретения будут поняты на основании последующего описания, прилагаемой формулы изобретения и сопроводительных чертежей.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение обеспечивает протокол высокоточной тактовой синхронизации для связи между устройствами в системе связи, такой как система беспроводной связи, содержащая беспроводную сеть. Варианты осуществления изобретения обеспечивают точную тактовую синхронизацию посредством взаимодействия между уровнями и подуровнями связи для сетей беспроводной связи.
На Фиг.1 показана блок-схема примерной беспроводной локальной сети 100 (такой как WLAN согласно стандартам IEEE 802.11), содержащей множественные беспроводные станции, включая АР 102, которая действует в качестве координатора, и другие станции (STA) 104, такие как STA1 …, STAn, причем сеть 100 усовершенствована, чтобы реализовывать временную синхронизацию согласно варианту осуществления настоящего изобретения, как описано в документе. Беспроводные станции выполняют беспроводную связь по каналу связи, такому как среда беспроводной связи (например, радиочастотный (РЧ, RF) канал). Сеть 100 реализует точную тактовую синхронизацию среди множества беспроводных станций посредством взаимодействия между уровнями и подуровнями связи для беспроводной связи согласно варианту осуществления изобретения.
Согласно варианту осуществления изобретения АР 102 и станции STA 104 реализуют структуру кадра для передачи данных между собой, используя пакетную передачу через уровни связи, включающие в себя канальный уровень (уровень управления передачей данных), содержащий уровень MAC, и уровень PHY, такие как определены в модели взаимодействия открытых систем (модели OSI). В беспроводной станции уровень MAC принимает пакет данных, включающий в себя данные полезной нагрузки, и присоединяет к нему МАС-заголовок, чтобы создать протокольную единицу обмена по протоколу MAC (MPDU). МАС-заголовок включает в себя информацию, такую как адрес отправителя (SA) и адрес получателя (DA). MPDU является частью блока данных услуги физического уровня (PSDU) и передается на уровень PHY в беспроводной станции, такой как АР, чтобы присоединить к нему PHY-заголовок (то есть преамбулу PHY), чтобы создать протокольную единицу данных уровня PHY (PPDU). PHY-заголовок включает в себя параметры для определения схемы передачи, включая схему кодирования/модуляции. До передачи в виде пакета от АР на STA к PPDU присоединяется преамбула, которая включает в себя оценку канала и информацию синхронизации.
На Фиг.2 показана примерная блок-схема PHY-уровня 110 и МАС-уровня 111 в беспроводной станции, которая реализует тактовую синхронизацию, используя модуль 112 управления синхронизацией, согласно вариантам осуществления настоящего изобретения. Уровень PHY включает в себя PLCP-подуровень 110А и PMD-подуровень 110В.
В одной реализации изобретение позволяет определять или оценивать задержку на различных уровнях связи (например, МАС-уровне 111, PHY-уровне 110), а также задержку вследствие прохождения информации между уровнями связи в беспроводной станции. Например, реализация изобретения обеспечивает высокоточную временную синхронизацию на уровнях MAC/PHY, ставя в центре внимания межуровневые/подуровневые взаимодействия, как описано далее ниже.
Согласно варианту осуществления изобретения временная синхронизация достигается с использованием сигналов синхронизации (таких как широковещательные маяки) по беспроводному каналу, непосредственно на уровнях PHY/MAC передающей беспроводной станции (например, АР 102) и приемной станции (например, STA 104) в беспроводной локальной сети, чтобы минимизировать флуктуацию времени задержки синхронизации. Когда приемная станция принимает маяк с временной отметкой от передающей станции, модуль 112 управления синхронизацией приемной станции подстраивает значение временной отметки на основании времени задержки на PHY-уровне 110, а также задержки между PHY-уровнем 110 и МАС-уровнем 111 на приемной станции. Затем приемная станция может установить свои системные часы (локальное время) в подстроенное значение временной отметки в маяке, чтобы синхронизировать с системными часами передающей станции (например, АР).
Связанные с хронированием параметры пропускаются между уровнями или подуровнями связи, чтобы поддерживать точную временную синхронизацию согласно вариантам осуществления изобретения. Изобретение также обеспечивает механизмы прохождения связанных с хронированием параметров между MAC-уровнем 111 и PLCP-подуровнем 110А, а также между PLCP-подуровнем 110А и PMD-подуровнем 110В. Как таковое, изобретение позволяет запись времени на различных уровнях/подуровнях связи и передачу параметров между уровнями и подуровнями связи.
На Фиг.3А иллюстрируется примерная временная диаграмма и последовательность 20 операций, причем АР передает пакет синхронизации, содержащий кадр-маяк, включающий в себя временную отметку, на приемную STA. Приемная STA подстраивает значение временной отметки кадра-маяка посредством прибавления задержки обработки на уровне PHY приемной STA, а также задержки прохождения между уровнями PHY и MAC приемной STA, когда, по меньшей мере, часть принятого кадра обрабатывается и переходит от уровня PHY на уровень MAC в беспроводной станции.
В передающей станции системные часы установлены в локальное время, и в приемной станции системные часы установлены в локальное время, причем локальное время на приемной станции необязательно начально синхронизировать с локальным временем на передающей станции. Примерным сценарием и процедурой для синхронизации локального времени на приемной станции с локальным временем на передающей станции является изложенное ниже согласно варианту осуществления настоящего изобретения. Локальное время ta0 является временем, когда полный пакет создается на уровне MAC передающей станции, которой в этом примере является АР. Время ta1 является временем, когда символ в предварительно определенной позиции пакета помещается в беспроводной канал PHY-уровнем АР. Время ta3′ является временем, когда символ в предварительно определенной позиции пакета принимается из беспроводного канала PHY-уровнем приемной STA. Время ta4′ является временем, когда принимаемый пакет проходит PHY-уровень STA и доходит до MAC-уровня STA.
Поскольку имеется дрейф часов, показания локальных часов/времени являются различными в АР 102 и в STA 104. В локальное время ta0 МАС-уровень АР устанавливает временную отметку маяка (то есть Timestamp) в виде локального времени ta1, когда символ в предварительно определенной позиции в кадре-маяке будет помещен в беспроводной канал PHY-уровнем АР. В одном варианте осуществления временная отметка (ta1) содержит оценку локального времени, когда символ кадра-маяка в предварительно определенной позиции в кадре-маяке будет помещен в беспроводной канал PHY-уровнем АР (например, средняя продолжительность задержки между ta0 и ta1). В другом варианте осуществления временная отметка (ta1) определяется на основе функций-примитивов хронирования, таких как описаны далее ниже в отношении Фиг.5-7.
Задержкой распространения является время прохождения бита в беспроводном канале (например, радиочастотном канале передачи), в ходе передачи пакета (например, маяка) от АР на STA. Задержка распространения обычно является незначительной относительно интервала между маяками и является функцией от физического расстояния между STA и АР. Таким образом, задержка распространения отличается для различных STA, которые находятся на различных расстояниях от АР. Однако как только позиции станций STA относительно АР являются фиксированными, соответствующие задержки распространения имеют постоянные значения. Задержка распространения является малой и относительно нетрудной для вычисления по сравнению с задержкой обработки. Например, если расстояние между АР и STA составляет менее 100 метров, задержка распространения составляет менее 100/(3*108)=333,3 нс. В одном примере, в котором маяки используются в качестве пакетов синхронизации, интервал между маяками означает интервал между пакетами синхронизации.
Задержка обработки включает в себя задержку обработки в АР (то есть задержку доступа) и задержку обработки в STA (то есть задержку приема). Задержка обработки в АР содержит время для прохождения бита от MAC-уровня АР через PHY-уровень АР к беспроводному каналу. Таким образом, чтобы минимизировать задержку обработки в АР, временная отметка пакета должна быть насколько возможно близкой ко времени ta1, когда символ в предварительно определенной позиции помещается в беспроводной канал.
Обработка задержки в STA содержит время, необходимое, чтобы символ в предварительно определенной позиции в пакете, принимаемом из беспроводного канала, подлежащий обработке на уровне PHY STA, достиг уровня MAC STA. В примере, показанном на Фиг.3А, задержка обработки в STA содержит разность между ta3′ и ta4′. Таким образом, чтобы минимизировать задержку обработки в STA, время ta4′ на уровне MAC STA должно быть насколько возможно близким по времени к ta3′, когда символ в предварительно определенной позиции принимается на уровне PHY STA из беспроводного канала.
На приемной STA уровень PHY принимает пакет-маяк в локальное время ta3′, причем уровень PHY сообщает время приема ta3′ на уровень MAC в приемной STA. В локальное время ta4′ уровень MAC приемной STA принимает пакет синхронизации от уровня PHY приемной станции (то есть уровень MAC STA принимает символ в предварительно определенной позиции принимаемого кадра, от уровня PHY STA во время ta4′).
Модуль управления синхронизацией приемной STA затем определяет разность между временной отметкой маяка и ta3, причем:
Δ=Timestamp-ta3.
Разность (число со знаком) затем прибавляется к локальному времени ta4, чтобы определить подстроенное локальное время S в виде:
S=ta4+Δ.
Системные часы на приемной станции, представляющие локальное время, устанавливаются в подстроенное локальное время S. Как таковые, системные часы на приемной станции являются синхронизированными с системными часами на передающей станции.
Что касается блок-схемы на Фиг.3В, реализация процесса 300 высокоточной временной синхронизации согласно варианту осуществления настоящего изобретения содержит следующие этапы процесса:
Этап 301: Уровень MAC АР формирует пакет синхронизации, содержащий кадр-маяк, и устанавливает временную отметку кадра-маяка, указывающую локальное время АР для времени передачи (например, ta1), когда символ в предварительно определенной позиции в кадре-маяке будет помещен в беспроводной канал уровнем PHY АР.
Этап 302: Уровень PHY АР начинает передачу маяка в беспроводном канале.
Этап 303: Уровень PHY STA начинает прием кадра-маяка в беспроводном канале от АР.
Этап 304: Уровень PHY STA считывает локальные часы/время STA для приема времени (например, ta3′), когда символ в предварительно определенной позиции кадра-маяка поступит на уровень PHY STA.
Этап 305: Уровень PHY STA сообщает время приема на уровень MAC STA и передает кадр-маяк на уровень MAC STA.
Этап 306: Уровень MAC STA принимает кадр-маяк от уровня PHY STA, причем кадр-маяк поступает на уровень MAC STA в локальное для STA время поступления (например, ta4′).
Этап 307: Уровень MAC STA определяет разность (например Δ) между временной отметкой кадра-маяка и временем приема (например, ta3′).
Этап 308: Уровень MAC STA прибавляет упомянутую разность (число со знаком) к упомянутому времени поступления (например, ta4′), чтобы определить скорректированное локальное время.
Этап 309: Часы STA устанавливаются в скорректированное локальное время, так что часы STA являются синхронизированными с часами АР.
Если расстояние между АР и STA можно оценить, чтобы определить задержку распространения, STA может дополнительно подстроить свои часы (таймер), вычитая задержку распространения из упомянутого скорректированного локального времени.
Примерное применение осуществления процесса синхронизации, описанного выше, описывается ниже в документе для стандартов беспроводной связи диапазона миллиметровых волн, таких как техническое описание IEEE 802.11 ad по частотному диапазону 60 ГГц, и техническое описание союза Wireless Gigabit Alliance (Союз по беспроводной гигабитной связи, WiGig). WiGig применяется к технологии беспроводной связи с мультигигабитной скоростью передачи, по частотному диапазону 60 ГГц. WiGig представляет предпринимаемое промышленностью усилие определить техническое описание интерфейса беспроводной цифровой сети для беспроводной передачи сигнала в частотном диапазоне 60 ГГц и выше для беспроводных локальных сетей и устройств беспроводной локальной сети, таких как бытовая электроника (СЕ) и другие электронные устройства, включающие в себя беспроводные радиостанции.
Согласно семейству описаний протокола IEEE 802.11 уровень MAC обеспечивает примитивы и интерфейс для более высокого уровня, чтобы выполнять вычисления временных привязок. Это осуществляется посредством указания присутствия конца последнего символа конкретного кадра данных на более высокий уровень, причем более высокий уровень записывает временную отметку и посылает временную отметку посредством пакетов данных более высокого уровня. Варианты осуществления изобретения обеспечивают расширения к техническому описанию протокола IEEE 802.11 (такому как стандарт IEEE 802.11 ad), причем такие расширения, как описано в документе относительно вариантов осуществления изобретения, включают в себя процессы и архитектуры для временной синхронизации между передающей станцией и приемной станцией с тем результатом, что минимизируются артефакты, такие как флуктуации времени задержки, обусловленные взаимодействием между более высоким уровнем и уровнем MAC, и между уровнем MAC и уровнем PHY.
На Фиг.4 показана примерная блок-схема беспроводной локальной сети 200, содержащей беспроводную станцию-передатчик 201 и беспроводную станцию-приемник 210, согласно варианту осуществления изобретения. Каждая из станций 201 и 210 является примерной реализацией беспроводной станции, проиллюстрированной на Фиг.2 и описанной выше, согласно варианту осуществления изобретения. Как показано на Фиг.4, передающая станция 201 включает в себя PHY уровень 202, и MAC-уровень 203. Станция-передатчик 201 реализует тактовую синхронизацию, используя модуль 204 менеджера синхронизации MAC и модуль 205 менеджера синхронизации PHY, сконфигурированные, чтобы оперировать с пакетами 206 синхронизации/данных (включая информацию хронирования/синхронизации) согласно вариантам осуществления настоящего изобретения. Станция-приемник 210 включает в себя PHY-уровень 212 и МАС-уровень 213. Станция-приемник 210 обеспечивает тактовую синхронизацию, используя модуль 214 менеджера синхронизации MAC и модуль 215 менеджера синхронизации PHY, сконфигурированные, чтобы оперировать с пакетами синхронизации/данных 216 согласно вариантам осуществления настоящего изобретения. Пакеты синхронизации/данных 216 содержат пакеты 206 синхронизации/данных, принятые от станции-передатчика 201.
В одной реализации сеть 200 реализует протокол беспроводной связи на основе стандартов IEEE 802.11 и, кроме того, обеспечивает временную синхронизацию, используя функцию временной синхронизации (TSF), согласно варианту осуществления изобретения. МАС-уровень 203 станции-передатчика 201 включает в себя модуль 204 менеджера синхронизации MAC, и PHY уровень 205 включает в себя модуль 205 менеджера синхронизации PHY согласно варианту осуществления изобретения. Модуль 204 менеджера синхронизации MAC определяет фактическое время показания часов, когда информация в предварительно определенной позиции пакета 206 (например, маяка или другого кадра) передается PMD-подуровнем 110В (Фиг.2) PHY-уровня 202 станции-передатчика 201 при обнаружении модулем 205 менеджера синхронизации PHY.
МАС-уровень 213 станции-приемника 210 включает в себя модуль 214 менеджера синхронизации MAC, и PHY уровень 212 включает в себя модуль 215 менеджера синхронизации PHY согласно варианту осуществления изобретения. Модуль 214 менеджера синхронизации MAC определяет фактическое время показания часов, когда предварительно определенная позиция пакета 216 (например, маяка или другого кадра) принимается PMD-подуровнем 110В PHY-уровня 212 при обнаружении модулем 215 менеджера синхронизации PHY.
В одном варианте осуществления изобретения упомянутая предварительно определенная позиция устанавливается в начальную точку преамбулы пакета/кадра. На Фиг.5 показаны примерный процесс и временная диаграмма 30 для взаимодействий между уровнем MAC и PLCP-подуровнем PHY, и далее - между PLCP-подуровнем PHY и PMD-подуровнем PHY, для PHY-уровня 202 станции-передатчика 201 (например, АР 102 на Фиг.1) для кадра (пакета) связи согласно варианту осуществления изобретения. На Фиг.6 иллюстрируется примерная временная диаграмма и процесс 40 для взаимодействий между уровнем MAC и PLCP-подуровнем PHY, а также между PLCP-подуровнем PHY и PMD-подуровнем PHY для PHY-уровня 212 станции-приемника 210 (например, STA 104 на Фиг.1) для передачи кадра (пакета) согласно варианту осуществления изобретения. Примерный сценарий работы согласно варианту осуществления изобретения описывается ниже в отношении чертежей Фиг.4-6.
Модуль 204 менеджера синхронизации MAC передающей станции 201 (Фиг.5) определяет фактическое показание часов в виде временной отметки (ta1), когда упомянутый символ в предварительно определенной позиции передается в беспроводном канале, посредством параметра TIME_OF_DEPARTURE (время отправки) в рамках вектора TXSTATUS (состояние передатчика) после выдачи PLCP-подуровнем 110А примитива PHY_TXSTART.confirmation (TXSTATUS) (то есть PHY-TXSTART.confirm) (подтверждение начала передачи на уровне PHY) на МАС-уровень 203. Параметр TIME_OF_DEPARTURE несет значение времени для начальной точки преамбулы, подлежащей передаче на PMD-подуровне 110В PHY-уровня 202 беспроводной станции-передатчика 201. Вектор TXSTATUS представляет перечень параметров, который уровень PHY обеспечивает на уровень MAC, связанных с передачей MPDU. Этот вектор TXSTATUS содержит рабочие параметры и PLCP, и PHY. PHY_TXSTART.confirmation является служебным примитивом, передаваемым на уровень MAC уровнем PHY для запуска передачи MPDU.
C-PSDU обозначает кодированный PSDU. Обычно самая надежная схема кодирования/модуляции применяется к полю PHY сигнала в PHY-заголовке, и добавляется дополнительный контроль циклическим избыточным кодом (CRC), чтобы обеспечить корректный прием этой информации в приемнике. МАС-заголовок и данные полезной нагрузки обычно обрабатываются одинаково и передаются с использованием одинаковой схемы кодирования/модуляции, которая является менее устойчивой, чем для поля PHY сигнала в PHY-заголовке.
Модуль 214 менеджера синхронизации MAC MAC-уровня 213 станции-приемника 210 (Фиг.6) получает оценку времени, что переданная преамбула кадра стартовала, чтобы подлежать приему на PHY-уровне 212 станции-приемника 210, используя параметр RX_START_OF_FRAME_OFFSET (сдвиг приема начала кадра) в рамках RXVECTOR (вектора приема) после выдачи PLCP-подуровнем PHY-уровня 212 примитива PHY_RXSTART.indication (RXVECTOR) (указание начала приема на уровне PHY (вектор приема)) (то есть, PHY-RXSTART.Ind) на МАС-уровень 213.
Параметр RX_START_OF_FRAME_OFFSET несет оценочный временной сдвиг (в единицах 10 наносекунд) от момента времени, в который начало преамбулы, соответствующей входящему кадру (пакету), поступило на уровень PHY станции-приемника 210 (например, вход антенны), до момента времени, в который примитив PHY_RXSTART.indication выдается на МАС-уровень 213. Следовательно, время, когда МАС-уровень 213 приемника получает примитив PHY_RXSTART.indication (RXVECTOR) меньше RX_START_OF_FRAME_OFFSET, обеспечивает оценочное время приема начала преамбулы на станции-приемника 210.
PHY_RXSTART.indication является указанием уровнем PHY на уровень MAC, что PLCP принял действительный ограничитель начала кадра (SFD) и PLCP-заголовок. Примитив обеспечивает PHY-RXSTART.indication (RXVECTOR). Вектор RXVECTOR представляет перечень параметров, который PHY предоставляет уровню MAC по приему действительного PLCP-заголовка или по приему последнего бита данных PSDU в принимаемом кадре. Вектор RXVECTOR содержит параметры и MAC, и управления MAC.
В примерной реализации для стандарта беспроводной связи диапазона миллиметровых волн (сокращенно mmW или mmWave) механизм синхронизации согласно варианту осуществления изобретения являет следующее. Станция-передатчик 201, передающая пакет mmWave, такой как кадр-маяк (Beacon), или кадр-объявление (Announce), устанавливает значение поля временной отметки кадра так, что оно равно значению TSF таймера передатчика во время, когда начинается передача преамбулы кадра от PHY-уровня 202 беспроводной станции 201 на беспроводной канал. Значение поля временной отметки кадра включает в себя какие-либо задержки передающей станции, тогда как, по меньшей мере, часть кадра проходит через локальный PHY уровень 202 станции от интерфейса MAC-PHY к интерфейсу с беспроводным каналом, на станции-передатчике 201.
В беспроводной станции-приемнике 210, действующей в полосе mmWave, значение временной отметки принятого кадра получают и подстраивают посредством прибавления величины, равной задержке на станции-приемнике 210, когда, по меньшей мере, часть принятого кадра проходит через локальный PHY-уровень 212, плюс время после того, так преамбула стартовала, чтобы подлежать приему на PHY-уровне 212, в виде оценки по RX_START_OF_FRAME_OFFSET.
Согласно другому варианту осуществления изобретения упомянутая предварительно определенная позиция в кадре, передаваемом от передающей станции 201 на приемную станцию 210, устанавливается в начальную точку PLCP-заголовка. Модуль 204 менеджера синхронизации MAC МАС-уровня 203 станции-передатчика 201 получает фактическое время показания часов после того, как выдается PHY_TXSTART.confirmation (то есть PHY-TXSTART.confirm) на MAC-уровень 203 в начале PLCP-заголовка.
На станции-приемнике 210, PMD_DATA.ind (то есть PM_DATA.indication) (указание данных подуровня PMD) выдается от подуровня PMD на подуровень PLCP PHY-уровня 212, в начале PLCP-заголовка, причем модуль 215 менеджера синхронизации PHY в подуровне PLCP станции-приемника 210 определяет, когда начало PLCP-заголовка принимается на PMD-подуровне PHY-уровня 212. PHY_RXSTART.indication (RXVECTOR) выдается на МАС-уровень 213 в конце PLCP-заголовка. PMD_DATA.ind информирует PLCP, что преамбула успешно обнаружена на подуровне PMD, и данные (PLCP-заголовок) начнут проходить от подуровня PMD на подуровень PLCP.
Согласно аспекту изобретения к RXVECTOR добавлен параметр RX_START_TIME_OF_PLCP_HEADER (время начала приема PLCP-заголовка), чтобы записывать время, когда PMD_DATA.ind выдается на подуровень PLCP PHY-уровня 212 приемной станции 210. Параметр RX_START_TIME_OF_PLCP_HEADER несет значение времени, указывающее время, что начало PLCP-заголовка принято на подуровне PMD PHY-уровня 212 станции-приемника 210.
Согласно другому варианту осуществления изобретения для стандарта беспроводной связи диапазона миллиметровых волн, использующего механизм синхронизации согласно варианту осуществления изобретения, беспроводная станция-передатчик 201, передающая пакет mmWave, такой как кадр-маяк, или кадр-объявление, устанавливает значение поля временной отметки кадра так, что оно равно значению TSF таймера передатчика во время, когда начинается передача первого символа данных PLCP-заголовка кадра, передаваемого на беспроводной канал. Значение временной отметки включает в себя какие-либо задержки передающей станции, тогда как, по меньшей мере, часть кадра переходит через локальный для станции PHY-уровень 202 от интерфейса MAC-PHY к своему интерфейсу с беспроводным каналом, на станции-передатчике 201.
На беспроводной станции-приемнике 210, действующей в полосе mmWave, значение временной отметки принятого кадра получают и подстраивают посредством прибавления величины, равной задержке приемной станции из-за того, как, по меньшей мере, часть принятого кадра проходит локальный PHY-уровень 212, плюс время после приема первого символа данных PLCP-заголовка на PHY-уровне 212, как указано по RX_START_TIME_OF_PLCP_HEADER.
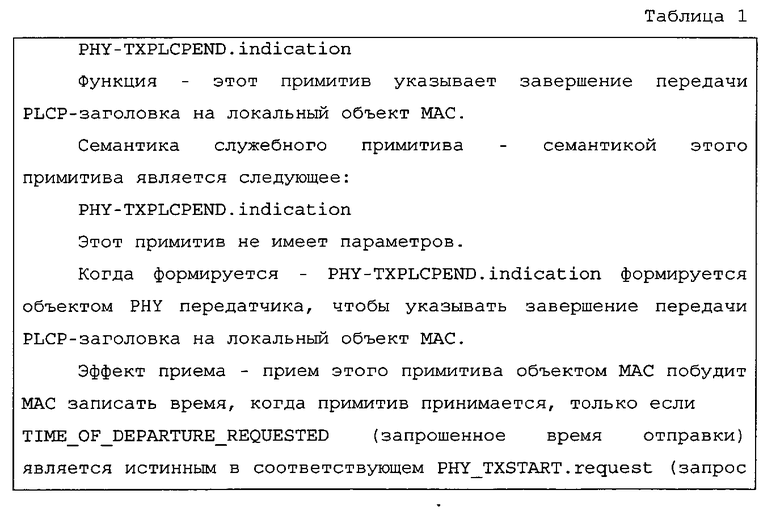
Что касается примерной временной диаграммы и процесса 50 на станции-передатчике 201 на Фиг.7, согласно другому варианту осуществления изобретения, упомянутая предварительно определенная позиция в кадре, передаваемом от передающей станции 201 на приемную станцию 210, устанавливается в конечную точку PLCP-заголовка пакета/кадра. Конкретно Фиг.7 показывает примерное взаимодействие между уровнями/подуровнями MAC-PLCP-PMD на станции-передатчике 201 на основе примитива PHY_TXPLCPEND.indication (указание завершения передачи PLCP на уровне PHY), обеспеченного согласно варианту осуществления изобретения.
Примитив PHY_TXPLCPEND.indication (то есть PHY-TXPLCPEND.indication) содержит сигнализацию на уровень MAC передатчика, информирующую, что передача PLCP-заголовка в беспроводном канале завершена, причем уровень MAC может записать время, когда получена PHY_TXPLCPEND.indication в виде временной отметки (ta1) согласно варианту осуществления изобретения.
На станции-передатчике 201 это позволяет получать время, непосредственно используя примитив PHY_TXPLCPEND.indication, который выдается на МАС-уровень 203, когда передача PLCP-заголовка завершается на PHY-уровне 202. МАС-уровень 203 станции-передатчика 201 получает значение времени (локальное время), когда передача PLCP-заголовка завершается на PHY-уровне 202, посредством записи значения времени, когда примитив PHY_TXPLCPEND.indication принимается от подуровня PLCP PHY-уровня 202. На станции-приемнике 210 МАС-уровень 213 получает фактическое локальное время (ta3′) на основе PHY_RXSTART.indication, причем PHY_RXSTART.indication выдается на МАС-уровень 213 в конце PLCP-заголовка (Фиг.6).
Согласно варианту осуществления изобретения, чтобы определить PHY-TXPLCPEND.indication, в Таблице 1 обеспечиваются следующие дополнения (расширения) для описания стандарта IEEE 802.11:
ТАБЛИЦА 1. Дополнения к подпункту 12.3.5 стандарта IEEE 802.11-2007, IEEE Standard for Information technology-Telecommunications and information exchange between systems-Local and metropolitan area networks. Specific requirements, Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications (Стандарт IEEE для информационной технологии-телекоммуникаций и обмена информации между системами локальных и городского масштаба сетей. Специальные требования, Часть 11: Спецификации управления доступом к среде передачи (MAC) и физического уровня (PHY) беспроводной LAN), IEEE Computer Society, 12 июня 2007:

Согласно варианту осуществления изобретения станция-передатчик 201, передающая кадр mmWave, такой как кадр-маяк или кадр-объявление, устанавливает значение поля временной отметки кадра так, чтобы оно равнялось значению TSF таймера передатчика во время, когда начинается передача символа данных, содержащего первый бит MPDU, по беспроводному каналу. Значение временной отметки включает в себя какие-либо задержки передающей станции, тогда как, по меньшей мере, часть кадра проходит через локальный PHY 202 от интерфейса MAC-PHY уровней к интерфейсу с беспроводным каналом, на станции-передатчике 201.
При действии в полосе mmW, на станции-приемнике 210, значение временной отметки принятого кадра получают и подстраивают посредством прибавления величины, равной задержке через локальный PHY-уровень 212 станции-приемника 210 плюс время после того, как прием последнего символа данных PLCP-заголовка принимаемого кадра был завершен, как указано посредством PHY_RXSTART.indication, на станции-приемнике 210.
Примерный процесс синхронизации на Фиг.3А применяется к процессам в отношении Фиг.5-7, однако, предпочтительнее значение (t1) временной отметки определяется на основании примитивов синхронизации относительно Фиг.5-7, чем оценки относительно Фиг.3А. Конкретно ta0 является временем, когда символ в предварительно определенной позиции в кадре находится на уровне MAC передатчика, ta1 является временем, когда этот символ помещается в беспроводной канал передатчиком, ta3′ является значением времени, когда этот символ принимается в беспроводном канале уровнем PHY приемника, ta4′ является временем, когда приемник начинает подстройку (часов) локального времени после приема символа (то есть маяка или других кадров синхронизации, которые несут информацию временной синхронизации, такую как информация временной отметки). Приемник подстраивает значение своих локальных часов посредством прибавления к ним Δ (причем Δ=ta1-ta3′). Временная отметка включает в себя значение ta1.
Хотя некоторые варианты осуществления описаны для АР и STA, варианты осуществления изобретения также применимы для синхронизации между любыми двумя соседними STA. Таким образом, согласно данному изобретению для достижения более высокой точности временной синхронизации между АР и станциями STA время локальных часов считывается в позиции, насколько возможно близкой к точке срабатывания по событию, каковое подразумевает, что значения времени локальных часов считываются на уровне PHY, чтобы минимизировать задержку распространения и обработки.
Согласно вариантам осуществления настоящего изобретения, когда пакет создается уровнем MAC в АР, предпочтительнее осуществляется формирование временной отметки пакета со временем локальных часов при поступлении пакета на физический (PHY) уровень АР для передачи по каналу, чем традиционное формирование временной отметки на уровне MAC в АР. Это уменьшает задержку обработки (то есть уменьшает задержку доступа в АР). Подобным образом часы STA считываются на уровне PHY STA, а не на уровне MAC, когда пакет принимается на уровне PHY STA. Кроме того, часы STA обновляются по необходимости на основании временной отметки принятого пакета. Это дополнительно уменьшает задержку обработки (то есть уменьшает задержку приема в STA).
Как известно специалистам в данной области техники, вышеуказанные примерные варианты осуществления, описанные выше, могут быть реализованы многими способами, такими как в виде команд программы для исполнения процессором, в виде программных модулей, микрокода, в виде компьютерного программного продукта на читаемом компьютером носителе, в виде логических схем, в виде специализированных интегральных схем, в виде микропрограммного обеспечения, в виде устройств бытовой электроники и т.д., в беспроводных устройствах, в беспроводных передатчиках/приемниках, в беспроводных сетях и т.д. Кроме того, упомянутые варианты осуществления могут принимать форму полностью аппаратного исполнения, полностью программного исполнения или исполнения, содержащего и аппаратные, и программные компоненты. Варианты осуществления настоящего изобретения были описаны со ссылкой на иллюстрации последовательностей операций и/или блок-схем для способов, устройств (систем) и компьютерных программных продуктов согласно вариантам осуществления изобретения. Каждый этап таких иллюстраций/схем, или комбинации таковых, могут быть реализованы посредством команд компьютерной программы. Команды компьютерной программы при предоставлении на процессор образуют машину, так что команды, которые исполняются при посредстве процессора, создают средство для реализации функций/операций, описанных в виде последовательности операций и/или блок-схем. Каждый блок в структурной и/или блочной схемах может представлять аппаратный и/или программный модуль или логику, реализующие варианты осуществления настоящего изобретения. В альтернативных реализациях функции, указанные в блоках, могут происходить не в порядке следования, указанного на чертежах, одновременно, и т.д.
Термины ′′носитель компьютерной программы′′, ′′используемый компьютером носитель′′, ′′читаемый компьютером носитель′′ и ′′компьютерный программный продукт′′ используются, чтобы в целом ссылаться на носители, такие как основная память, вторичная память, накопитель со съемным носителем, жесткий диск, устанавливаемый в накопитель на жестком диске, и сигналы. Эти компьютерные программные продукты являются средством для предоставления программного обеспечения на компьютерную систему. Читаемый компьютером носитель позволяет вычислительной системе считывать с читаемого компьютером носителя данные, команды, сообщения или кадры сообщений и другую читаемую компьютером информацию. Читаемый компьютером носитель, например, может включать в себя энергонезависимую память, такую как накопитель на гибком диске, постоянное запоминающее устройство (ПЗУ, ROM), флэш-память, накопитель на диске, ПЗУ на компакт-диске (CD-ROM) и другое постоянное ЗУ. Это полезно, например, для транспортировки информации, такой как данные и компьютерные команды, между вычислительными системами. Кроме того, читаемый компьютером носитель может содержать читаемую компьютером информацию в носителе с кратковременным состоянием, таком как канал связи в сети и/или сетевой интерфейс, включая проводную сеть или беспроводную сеть, которые дает возможность компьютеру считывать такую читаемую компьютером информацию. Компьютерные программы (также называемые логикой компьютерного управления) хранятся в основной памяти и/или вторичной памяти. Компьютерные программы также могут приниматься через интерфейс связи. Такие компьютерные программы при исполнении дают возможность вычислительной системе выполнять функции вариантов осуществления, как обсуждено в документе. Конкретно, компьютерные программы при исполнении дают возможность процессору многоядерного процессора выполнять функции вычислительной системы. Соответственно, такие компьютерные программы представляют контроллеры вычислительной системы.
Хотя настоящее изобретение было описано со ссылкой на некоторые варианты такового, однако являются возможными другие варианты. Следовательно, существо и объем прилагаемой формулы изобретения не должны ограничиваться описанием предпочтительных вариантов, содержащихся в документе.
Изобретение относится к системам связи. Технический результат заключается в уменьшении задержки обработки пакетов. Временная синхронизация в системе беспроводной связи содержит передачу кадра синхронизации от передатчика на приемник по среде беспроводной связи. Кадр синхронизации включает в себя временную отметку, указывающую локальное время передатчика, когда символ в предварительно определенной позиции кадра синхронизации помещается в среду беспроводной связи для передачи. Кадр синхронизации принимается в приемнике, который определяет время приема, содержащее локальное время приемника, когда упомянутый символ кадра синхронизации был принят на физическом уровне приемника. Временная синхронизация выполняется посредством определения разности между упомянутой временной отметкой и упомянутым временем приема, и подстройки локального времени приемника на основе упомянутой разности, чтобы синхронизировать по времени приемник с передатчиком. 3 н. и 51 з.п. ф-лы, 8 ил., 1 табл.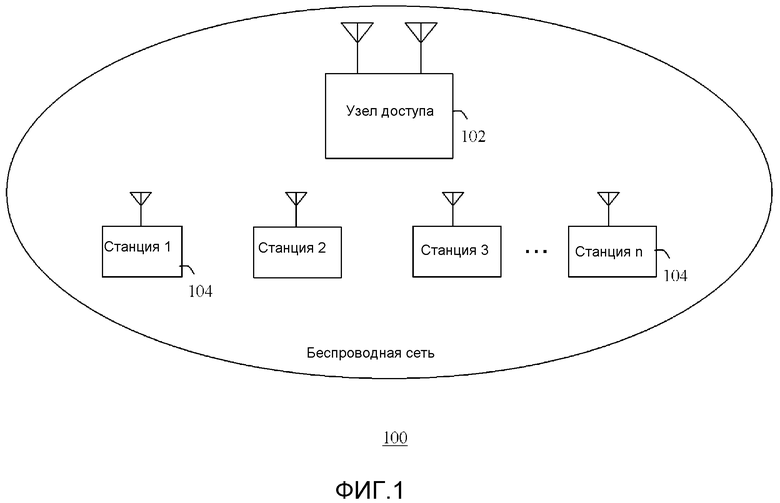
1. Способ временной синхронизации в системе беспроводной связи, содержащий:
передачу кадра синхронизации от беспроводного передатчика на беспроводной приемник по среде беспроводной связи, причем кадр синхронизации включает в себя временную отметку, содержащую время передачи, указывающее локальное время передатчика, когда символ в предварительно определенной позиции кадра синхронизации помещается в среду беспроводной связи для передачи;
прием кадра синхронизации на физическом уровне приемника;
определение времени приема, содержащего локальное время приемника, когда упомянутый символ кадра синхронизации был принят из среды беспроводной связи на физическом уровне приемника;
временную синхронизацию приемника с передатчиком посредством:
определения разности между упомянутой временной отметкой и упомянутым временем приема; и
подстройки локального времени приемника на основании упомянутой разности, чтобы синхронизировать по времени приемник с передатчиком.
2. Способ по п.1, дополнительно содержащий:
предоставление принятого кадра синхронизации на более высокий уровень связи в приемнике, причем кадр синхронизации поступает на упомянутый более высокий уровень связи во время поступления, указывающее локальное время приемника, в которое кадр синхронизации поступил на упомянутый более высокий уровень;
причем временная синхронизация приемника с передатчиком содержит:
использование временной отметки принятого кадра синхронизации для определения разности между упомянутой временной отметкой и упомянутым временем приема;
определение скорректированного локального времени на основании комбинации упомянутого времени поступления и упомянутой разности; и
обновление локального времени приемника на основании скорректированного локального времени, чтобы синхронизировать по времени приемник с передатчиком.
3. Способ по п.1, дополнительно содержащий:
считывание локальных часов передатчика, чтобы получить локальное время, когда символ в предварительно определенной позиции пакета синхронизации помещается в среду беспроводной связи для передачи на приемник; и
считывание локальных часов приемника, чтобы получить локальное время, когда символ в предварительно определенной позиции пакета синхронизации принимается в среде беспроводной связи от передатчика.
4. Способ по п.1, в котором временная синхронизация приемника с передатчиком содержит:
подстройку локального времени приемника посредством прибавления задержки обработки на физическом уровне приемника и задержки обработки между физическим уровнем и упомянутым более высоким уровнем связи.
5. Способ по п.1, в котором:
временная отметка содержит время передачи, оценивающее локальное время передатчика, когда символ в предварительно определенной позиции кадра синхронизации помещается в среду беспроводной связи для передачи.
6. Способ по п.1, в котором:
временная отметка содержит локальное время передатчика, когда символ в предварительно определенной позиции кадра синхронизации помещается в среду беспроводной связи для передачи.
7. Способ по п.1, в котором:
система беспроводной связи содержит беспроводную локальную сеть;
передатчик содержит уровень управления доступом к среде передачи (MAC) и физический (PHY) уровень для беспроводной связи; и
приемник содержит уровень MAC и уровень PHY для беспроводной связи, упомянутый более высокий уровень связи приемника содержит упомянутый уровень MAC.
8. Способ по п.7, в котором:
упомянутая предварительно определенная позиция устанавливается в начальную точку преамбулы кадра синхронизации.
9. Способ по п.8, дополнительно содержащий:
определение, уровнем MAC передатчика, локального времени, когда упомянутый символ в предварительно определенной позиции передается в беспроводном канале, с использованием параметра TIME_OF_DEPARTURE (время отправки), после выдачи подуровнем процедуры конвергенции уровня PHY (PLCP) уровня PHY передатчика примитива PHY_TXSTART.confirmation (TXSTATUS) (подтверждение начала передачи на уровне PHY (состояние передатчика)) на уровень MAC передатчика;
причем параметр TIME_OF_DEPARTURE несет значение времени для начальной точки преамбулы, подлежащей передаче на зависящем от физической среды передачи (PMD) подуровне уровня PHY передатчика.
10. Способ по п.9, дополнительно содержащий:
получение, уровнем MAC приемника, оценки времени, что уровень PHY приемника начал прием упомянутой преамбулы пакета синхронизации, с использованием параметра RX_START_OF_FRAME_OFFSET (сдвиг приема начала кадра) в рамках RXVECTOR (вектора приема), после выдачи подуровнем PLCP уровня PHY приемника примитива PHY_RXSTART.indication (RXVECTOR) (указание начала приема на уровне PHY (вектор приема)) на уровень MAC приемника;
причем параметр RX_START_OF_FRAME_OFFSET несет оценочный временной сдвиг от момента времени, в который начало преамбулы кадра синхронизации поступает на уровень PHY приемника, до момента времени, в который примитив PHY_RXSTART.indication выдается на уровень MAC приемника.
11. Способ по п.7, в котором упомянутая предварительно определенная позиция устанавливается в начальную точку PLCP-заголовка кадра синхронизации.
12. Способ по п.11, дополнительно содержащий:
определение, уровнем MAC передатчика, локального времени, когда упомянутый символ в предварительно определенной позиции передается в беспроводном канале после того, как выдается PHY_TXSTART.confirmation на уровень MAC передатчика в начале PLCP-заголовка.
13. Способ по п.12, дополнительно содержащий:
выдачу, подуровнем PMD уровня PHY приемника, PMD_DATA.ind (указания данных подуровня PMD) на подуровень PLCP уровня PHY приемника в начале PLCP-заголовка;
определение, когда начало PLCP-заголовка принимается на подуровне PMD уровня PHY; и
выдачу PHY_RXSTART.indication (RXVECTOR) на уровень MAC приемника в конце PLCP-заголовка.
14. Способ по п.13, дополнительно содержащий:
обеспечение параметра RX_START_TIME_OF_PLCP_HEADER (время начала приема PLCP-заголовка) в RXVECTOR для записи времени, когда PMD_DATA.ind выдается на подуровень PLCP уровня PHY приемника;
причем параметр RX_START_TIME_OF_PLCP_HEADER указывает время, в которое начало PLCP-заголовка принимается на подуровне PMD уровня PHY приемника.
15. Способ по п.7, в котором упомянутая предварительно определенная позиция устанавливается в конечную точку PLCP-заголовка кадра синхронизации.
16. Способ по п.15, дополнительно содержащий:
обеспечение примитива PHY_TXPLCPEND.indication (указание завершения передачи PLCP на уровне PHY);
получение передатчиком локального времени непосредственно с использованием примитива PHY_TXPLCPEND.indication, выдаваемого на уровень MAC передатчика, когда передача PLCP-заголовка завершается на уровне PHY передатчика.
17. Способ по п.16, дополнительно содержащий:
получение, уровнем MAC передатчика, локального времени, когда передача PLCP-заголовка завершается на уровне PHY, посредством записи времени, когда примитив PHY_TXPLCPEND.indication принимается от подуровня PLCP уровня PHY передатчика.
18. Способ по п.17, дополнительно содержащий:
выдачу PHY_RXSTART.indication (RXVECTOR) на уровень MAC приемника в конце PLCP-заголовка; и
получение, уровнем MAC приемника, локального времени после того, как выдается PHY_RXSTART.indication на уровень MAC приемника в конце PLCP-заголовка.
19. Способ по п.1, в котором система беспроводной связи содержит беспроводную локальную сеть.
20. Способ по п.19, в котором беспроводная локальная сеть содержит беспроводную локальную сеть диапазона миллиметровых волн.
21. Способ по п.20, в котором передатчик и приемник включают в себя беспроводные радиостанции, действующие в диапазоне 60 ГГц, а среда беспроводной связи содержит беспроводной радиочастотный канал.
22. Способ по п.21, в котором:
передатчик содержит узел доступа;
пакет синхронизации содержит широковещательный маяк от узла доступа и передаваемый по беспроводному каналу.
23. Система беспроводной связи, содержащая:
беспроводной передатчик; и
беспроводной приемник; причем
беспроводной передатчик содержит модуль синхронизации, сконфигурированный для передачи кадра синхронизации на беспроводной приемник по среде беспроводной связи, причем кадр синхронизации включает в себя временную отметку, содержащую время передачи, указывающее локальное время передатчика, когда символ в предварительно определенной позиции кадра синхронизации помещается в среду беспроводной связи для передачи;
беспроводной приемник содержит модуль синхронизации, сконфигурированный для определения времени приема, содержащего локальное время приемника, когда упомянутый символ кадра синхронизации был принят из среды беспроводной связи на физическом уровне приемника, и для предоставления принятого кадра синхронизации на более высокий уровень связи в приемнике, причем кадр синхронизации поступает на упомянутый более высокий уровень связи во время поступления, указывающее локальное время приемника, в которое кадр синхронизации поступил на упомянутый более высокий уровень;
модуль синхронизации приемника синхронизирует по времени приемник с передатчиком посредством:
определения разности между упомянутой временной отметкой и упомянутым временем приема; и
подстройки локального времени приемника с помощью упомянутой разности, чтобы синхронизировать по времени приемник с передатчиком.
24. Система по п.23, в которой модуль синхронизации приемника синхронизирует по времени приемник с передатчиком посредством:
использования временной отметки принятого кадра синхронизации для определения разности между упомянутой временной отметкой и упомянутым временем приема;
определения скорректированного локального времени на основании комбинации упомянутого времени поступления и упомянутой разности; и
обновления локального времени приемника на основании скорректированного локального времени, чтобы синхронизировать по времени приемник с передатчиком.
25. Система по п.23, в которой:
модуль синхронизации передатчика считывает локальные часы передатчика, чтобы получить локальное время, когда символ в предварительно определенной позиции пакета синхронизации помещается в среду беспроводной связи для передачи на приемник; и
модуль синхронизации приемника считывает локальные часы приемника, чтобы получить локальное время, когда символ в предварительно определенной позиции пакета синхронизации принимается в среде беспроводной связи от передатчика.
26. Система по п.23, в которой модуль синхронизации приемника подстраивает локальное время приемника посредством прибавления задержки обработки на физическом уровне приемника и задержки обработки между физическим уровнем и упомянутым более высоким уровнем связи.
27. Система по п.23, в которой временная отметка содержит время передачи, оценивающее локальное время передатчика, когда символ в предварительно определенной позиции кадра синхронизации помещается в среду беспроводной связи для передачи.
28. Система по п.23, в которой:
система беспроводной связи содержит беспроводную локальную сеть; и
передатчик содержит уровень управления доступом к среде передачи (MAC) и физический (PHY) уровень для беспроводной связи; и
приемник содержит уровень MAC и уровень PHY для беспроводной связи, упомянутый более высокий уровень связи приемника содержит упомянутый уровень MAC.
29. Система по п.28, в которой:
упомянутая предварительно определенная позиция устанавливается в начальную точку преамбулы кадра синхронизации.
30. Система по п.29, в которой:
упомянутый модуль синхронизации передатчика включает в себя упомянутый уровень MAC передатчика для определения локального времени, когда упомянутый символ в предварительно определенной позиции передается в беспроводном канале, с использованием параметра TIME_OF_DEPARTURE, после выдачи подуровнем процедуры конвергенции уровня PHY (PLCP) уровня PHY передатчика примитива PHY_TXSTART.confirmation (TXSTATUS) на уровень MAC передатчика;
причем параметр TIME_OF_DEPARTURE несет значение времени для начальной точки преамбулы, подлежащей передаче на зависящем от физической среды передачи (PMD) подуровне уровня PHY передатчика.
31. Система по п.30, в которой:
модуль синхронизации приемника включает в себя упомянутый уровень MAC приемника для получения оценки времени, что уровень PHY приемника начал прием упомянутой преамбулы пакета синхронизации, с использованием параметра RX_START_OF_FRAME_OFFSET в рамках RXVECTOR, после выдачи подуровнем PLCP уровня PHY приемника примитива PHY_RXSTART.indication (RXVECTOR) на уровень MAC приемника;
причем параметр RX_START_OF_FRAME_OFFSET несет оценочный временной сдвиг от момента времени, в который начало преамбулы кадра синхронизации поступает на уровень PHY приемника, до момента времени, в который примитив PHY_RXSTART.indication выдается на уровень MAC приемника.
32. Система по п.28, в которой упомянутая предварительно определенная позиция устанавливается в начальную точку PLCP-заголовка кадра синхронизации.
33. Система по п.32, в которой:
модуль синхронизации передатчика включает в себя упомянутый уровень MAC передатчика для определения локального времени, когда упомянутый символ в предварительно определенной позиции передается в беспроводном канале, после того, как выдается PHY_TXSTART.confirmation на уровень MAC передатчика в начале PLCP-заголовка.
34. Система по п.33, в которой:
подуровень PMD уровня PHY приемника выдает PMD_DATA.ind на подуровень PLCP уровня PHY приемника в начале PLCP-заголовка;
модуль синхронизации приемника определяет, когда начало PLCP-заголовка принимается на подуровне PMD уровня PHY; и
уровень PHY выдает PHY_RXSTART.indication (RXVECTOR) на уровень MAC приемника в конце PLCP-заголовка.
35. Система по п.34, в которой:
параметр RX_START_TIME_OF_PLCP_HEADER обеспечивается в RXVECTOR для записи времени, когда PMD_DATA.ind выдается на подуровень PLCP уровня PHY приемника; и
параметр RX_START_TIME_OF_PLCP_HEADER указывает время, в которое начало PLCP-заголовка принимается на подуровне PMD уровня PHY приемника.
36. Система по п.28, в которой упомянутая предварительно определенная позиция устанавливается в конечную точку PLCP-заголовка кадра синхронизации.
37. Система по п.36, в которой:
обеспечивается примитив PHY_TXPLCPEND.indication; и
передатчик получает локальное время непосредственно с использованием примитива PHY_TXPLCPEND.indication, выдаваемого на уровень MAC передатчика, когда передача PLCP-заголовка завершается на уровне PHY передатчика.
38. Система по п.37, в которой:
уровень MAC передатчика получает локальное время, когда передача PLCP-заголовка завершается на уровне PHY, посредством записи времени, когда примитив PHY_TXPLCPEND.indication принимается от подуровня PLCP уровня PHY передатчика.
39. Система по п.38, в которой:
PHY_RXSTART.indication (RXVECTOR) выдается на уровень MAC приемника в конце PLCP-заголовка; и
уровень MAC приемника получает локальное время после того, как выдается PHY_RXSTART.indication на уровень MAC приемника в конце PLCP-заголовка.
40. Система по п.23, в которой:
система беспроводной связи содержит беспроводную локальную сеть диапазона миллиметровых волн, и среда беспроводной связи содержит беспроводной радиочастотный канал;
передатчик содержит узел доступа; и
пакет синхронизации содержит широковещательный маяк от узла доступа и передаваемый по беспроводному каналу.
41. Беспроводной приемник, содержащий:
физический (PHY) уровень для беспроводной связи, включающий в себя:
прием кадра синхронизации от беспроводного передатчика по среде беспроводной связи, причем кадр синхронизации включает в себя временную отметку, содержащую время передачи, указывающее локальное время передатчика, когда символ в предварительно определенной позиции кадра синхронизации помещается в среду беспроводной связи для передачи на приемник; и
модуль синхронизации, сконфигурированный для определения времени приема, содержащего локальное время приемника, когда упомянутый символ кадра синхронизации был принят из среды беспроводной связи на физическом уровне приемника, и для предоставления принятого кадра синхронизации на более высокий уровень связи в приемнике, причем кадр синхронизации поступает на упомянутый более высокий уровень связи во время поступления, указывающее локальное время приемника, в которое кадр синхронизации поступил на упомянутый более высокий уровень; причем
модуль синхронизации приемника синхронизирует по времени приемник с передатчиком посредством:
определения разности между упомянутой временной отметкой и упомянутым временем приема; и
подстройки локального времени приемника с помощью упомянутой разности, чтобы синхронизировать по времени приемник с передатчиком.
42. Беспроводной приемник по п.41, в котором модуль синхронизации приемника синхронизирует по времени приемник с передатчиком посредством:
использования временной отметки принятого кадра синхронизации для определения разности между упомянутой временной отметкой и упомянутым временем приема;
определения скорректированного локального времени на основании комбинации упомянутого времени поступления и упомянутой разности; и
обновления локального времени приемника на основании скорректированного локального времени, чтобы синхронизировать по времени приемник с передатчиком.
43. Беспроводной приемник по п.41, в котором:
модуль синхронизации приемника считывает локальные часы приемника, чтобы получить локальное время, когда символ в предварительно определенной позиции пакета синхронизации принимается в среде беспроводной связи от передатчика.
44. Беспроводной приемник по п.41, в котором модуль синхронизации приемника подстраивает локальное время приемника посредством прибавления задержки обработки на физическом уровне приемника и задержки обработки между физическим уровнем и упомянутым более высоким уровнем связи.
45. Беспроводной приемник по п.41, в котором временная отметка содержит время передачи, оценивающее локальное время передатчика, когда символ в предварительно определенной позиции кадра синхронизации помещается в среду беспроводной связи для передачи.
46. Беспроводной приемник по п.41, в котором:
система беспроводной связи содержит беспроводную локальную сеть; и
упомянутый более высокий уровень связи приемника содержит упомянутый уровень управления доступом к среде передачи (MAC).
47. Беспроводной приемник по п.46, в котором:
упомянутая предварительно определенная позиция устанавливается в начальную точку преамбулы кадра синхронизации.
48. Беспроводной приемник по п.47, в котором:
модуль синхронизации приемника включает в себя упомянутый уровень MAC приемника для получения оценки времени, что уровень PHY приемника начал прием упомянутой преамбулы пакета синхронизации, с использованием параметра RX_START_OF_FRAME_OFFSET в рамках RXVECTOR, после выдачи подуровнем процедуры конвергенции уровня PHY (PLCP) уровня PHY приемника примитива PHY_RXSTART.indication (RXVECTOR) на уровень MAC приемника;
причем параметр RX_START_OF_FRAME_OFFSET несет оценочный временной сдвиг от момента времени, в который начало преамбулы кадра синхронизации поступает на уровень PHY приемника, до момента времени, в который примитив PHY_RXSTART.indication выдается на уровень MAC приемника;
упомянутый передатчик использует параметр TIME_OF_DEPARTURE после выдачи подуровнем PLCP уровня PHY передатчика примитива PHY_TXSTART.confirmation (TXSTATUS) на уровень MAC передатчика, причем параметр TIME_OF_DEPARTURE несет значение времени для начальной точки преамбулы, подлежащей передаче на зависящем от физической среды передачи (PMD) подуровне уровня PHY передатчика.
49. Беспроводной приемник по п.46, в котором упомянутая предварительно определенная позиция устанавливается в начальную точку PLCP-заголовка кадра синхронизации.
50. Беспроводной приемник по п.49, в котором:
подуровень PMD уровня PHY приемника выдает PMD_DATA.ind на подуровень PLCP уровня PHY приемника в начале PLCP-заголовка;
модуль синхронизации приемника определяет, когда начало PLCP-заголовка принимается на подуровне PMD уровня PHY;
уровень PHY выдает PHY_RXSTART.indication (RXVECTOR) на уровень MAC приемника в конце PLCP-заголовка;
передатчик определяет локальное время, когда упомянутый символ в предварительно определенной позиции передается в беспроводном канале после того, как выдается PHY_TXSTART.confirmation на уровень MAC передатчика в начале PLCP-заголовка.
51. Беспроводной приемник по п.50, в котором:
параметр RX_START_TIME_OF_PLCP_HEADER обеспечивается в RXVECTOR для записи времени, когда PMD_DATA.ind выдается на подуровень PLCP уровня PHY приемника; и
параметр RX_START_TIME_OF_PLCP_HEADER указывает время, в которое начало PLCP-заголовка принимается на подуровне PMD уровня PHY приемника.
52. Беспроводной приемник по п.46, в котором упомянутая предварительно определенная позиция устанавливается в конечную точку PLCP-заголовка кадра синхронизации.
53. Беспроводной приемник по п.52, в котором:
обеспечивается примитив PHY_TXPLCPEND.indication;
передатчик получает локальное время непосредственно с использованием примитива PHY_TXPLCPEND.indication, выдаваемого на уровень MAC передатчика, когда передача PLCP-заголовка завершается на уровне PHY передатчика;
уровень MAC передатчика получает локальное время, когда передача PLCP-заголовка завершается на уровне PHY, посредством записи времени, когда примитив PHY_TXPLCPEND.indication принимается от подуровня PLCP уровня PHY передатчика;
PHY_RXSTART.indication (RXVECTOR) выдается на уровень MAC приемника в конце PLCP-заголовка; и
уровень MAC приемника получает локальное время после того, как выдается PHY_RXSTART.indication на уровень MAC приемника в конце PLCP-заголовка.
54. Беспроводной приемник по п.41, в котором:
система беспроводной связи содержит беспроводную локальную сеть диапазона миллиметровых волн и среда беспроводной связи содержит беспроводной радиочастотный канал;
передатчик содержит узел доступа; и
пакет синхронизации содержит широковещательный маяк от узла доступа и передаваемый по беспроводному каналу.
| US 7120092 B2, 10.10.2006 | |||
| US 20100034539 А1, 11.02.2010 | |||
| WO 2009008938 A2, 15.01.2009 | |||
| RU 2005138302 А, 10.05.2006 |

