Изобретение относится к области изучения структуры пористых тел с использованием средств оптики и вычислительной техники и предназначено для получения цифрового изображения поверхности пористого тела с яркостным разделением объектов и фона.
При исследовании структуры поверхности пористого материала методами вычислительной техники на первом месте стоит задача правильной идентификации объектов и фона, что подразумевает обнаружение границы их разделения. В настоящее время известны различные способы выделения контуров объектов при помощи градиентного метода. Цифровое изображение поверхности материала содержит информацию о перепадах яркости, соответствующих областям контуров объектов. При поиске таких перепадов используются производные первого и второго порядка, а основная идея обнаружения перепадов базируется на поиске мест изображения, где яркость меняется достаточно быстро. Обычно для этих целей используются полутоновые цифровые изображения, однако информация о перепадах яркости часто бывает искажена наличием различных шумов, что затрудняет идентификацию. В связи с этим применяют различные маски, или, как их еще называют, детекторы (Собела, Превитта, Робертса, Кирша, Канни и др.), позволяющие с определенной степенью приближения обнаруживать контуры объектов. [Гонсалес Р., Вудс Р., Эддинс С. Цифровая обработка изображений в среде MATLAB / М.: Техносфера, 2006. - 616 с.].
Степень приближения зависит от уровня зашумленности изображения. Повышение точности идентификации контуров объектов обеспечивается за счет снижения негативного влияния шумов различными способами, которые можно разделить на два принципиальных класса:
- способы обработки цифрового изображения, основанные на применении специальных помехоустойчивых программных алгоритмов;
- способы предварительной обработки поверхности исследуемого материала, направленные на снижение влияния шумов при получении цифрового изображения. Чаще всего это физические, химические или механические способы.
Из предшествующего уровня развития техники известен способ помехоустойчивого градиентного выделения контуров объектов на цифровых изображениях, заключающийся в предварительном оценивании положения импульсных помех на изображении, формировании четырех вспомогательных масок, а также восьми управляющих векторов (по два вектора на основе каждой вспомогательной маски), изменении коэффициентов соответствующих четырех разноориентированных масок Превитта с использованием данных векторов, вычислении приближенного значения модуля градиента изображения и получении контуров объектов на изображении путем его порогового преобразования [RU 2403616 C1, G06K 9/48, H04N 1/409, G06T 9/20, 12.08.2009].
Также известен способ выделения контуров объектов на матрице полутонового растрового изображения, заключающийся в том, что для всех пикселей растрового изображения согласно выбранному способу вычисляют норму или квадрат нормы градиента изменения их яркости, затем на новой черно-белой монохромной матрице черным цветом на белом фоне выделяют все элементы, у которых значение нормы или квадрата нормы градиента больше порогового значения, а в качестве контуров объектов на монохромной матрице принимают связные конфигурации элементов черного цвета, для выбранного способа вычисления градиента определяют коэффициент, затем рассчитывают пороговое значение квадрата нормы градиента как произведение данного коэффициента на сумму квадратов средних величин модулей изменения яркости соседних пикселей по строкам и столбцам, у которых значения превышают общие средние уровни ненулевых изменений, соответственно, по строкам и столбцам, а среди связных конфигураций элементов черного цвета на монохромной матрице сразу отбрасывают конфигурации, у которых число входящих элементов менее 5-7 элементов, для оставшихся конфигураций вычисляют среднюю степень соседства - частное от деления суммы по всем элементам конфигурации соседних с ним элементов на сумму элементов в конфигурации, причем те конфигурации, у которых средняя степень соседства менее 3, отбрасывают, а оставшиеся принимают в качестве искомых контуров объектов [RU 2325044 C1, H04N 1/409, G06K 9/46, 21.02.2007].
Также известно устройство выделения контуров объектов на изображении, содержащее датчик изображения, блок выделения кадрового и строчного импульсов, аналого-цифровой преобразователь, генератор, цифровой сигнальный процессор, оперативное запоминающее устройство, в которое введены селектор, блок фильтрации, блок пространственного дифференцирования, буферная память блока фильтрации, буферная память блока пространственного дифференцирования, соединенные между собой. Повышение быстродействия достигается за счет аппаратной реализации операции фильтрации и пространственного дифференцирования в соответствующих блоках устройства [RU 2362210 C1, G06K 9/36, G06K 9/62, А61В 5/04, 29.11.2007].
Все указанные способы и устройства основаны на применении специальных помехоустойчивых алгоритмов и относятся к первому классу способов и реализующих устройств выделения контуров объектов.
Также известен способ, относящийся ко второму классу и являющийся наиболее близким аналогом, поскольку реализует цветовое разделение объектов и фона. Способ заключается в предварительной обработке исследуемой поверхности пористого материала рядом последовательных операций: шлифовки до ровной однородной поверхности; продувки компрессором для исключения забитости перового пространства; равномерного покрытия поверхности красящим составом (водным раствором гуаши черной водорастворимой); сушки; повторной продувки. Это позволяет провести цветовое выделение объектов (пор) черным цветом на фоне белого цвета. Для получения цифрового изображения используется планшетный цифровой сканер. Полученная цифровая модель поверхности соответствует терминологии бинарного изображения, поскольку является двухцветной картинкой, на которой представлены один или несколько объектов одного цвета на фоне, имеющем другой цвет. Применение последующей обработки, включающей бинаризацию, приводит к получению истинно бинарного изображения в понятиях машинного зрения. Такое изображение позволяет выделить объект интереса и является основой для анализа и распознавания формы объектов в изображении. Вместе с тем за счет цветового разделения объектов и фона повышается точность идентификации контуров объектов. [Бедарев А.А. Возможности компьютерного анализа макроструктуры ячеистого бетона и его практическая реализация // Казанская наука. Сборник научных статей - Казань: 2010. - №9. - С.92-96].
Как у способов первого, так и у способов второго класса имеются очевидные недостатки. Способы первого класса применяются к уже имеющимся цифровым изображениям, уровень шумов которых может быть различным, в зависимости от чего точность идентификации на сильно зашумленных участках не достаточно высока. Способы второго класса позволяют максимально снизить влияние шумов на получаемом цифровом изображении, однако требуют дополнительных ресурсо- и энергозатрат на этапе предварительной обработки исследуемой поверхности.
Целью изобретения является разработка способа и устройства для получения цифровых изображений поверхности пористого тела с яркостным разделением объектов и фона, обеспечивающих существенное повышение качества идентификации границ объектов при низких ресурсо- и энергозатратах.
Поставленная цель решается за счет применения направленного под острым углом к поверхности материала освещения. При этом со стороны падения света на месте объекта формируется заполненный тенью участок, четко отделяющий объект и фон и облегчающий последующую идентификацию границы. Наиболее четкого и точного разделения удается достичь со стороны падения света. В связи с этим возникает необходимость в получении серии изображений при падении света с различных сторон и их программном объединении таким образом, чтобы четкая граница объекта замкнулась. Для каждого цифрового изображения в серии вычисляются интенсивности соответственно красной, зеленой и синей составляющих цвета всех пикселей. Интенсивности соответствующих пикселей сравниваются между собой по каждому каналу (красному, синему и зеленому), а пиксель с наиболее близкой к черному цвету интенсивностью принимается как соответствующий пиксель нового изображения. Новое изображение формируется путем последовательного сравнения всех соответствующих пикселей серии изображений и выбора наиболее близких к черному цвету указанным способом. Это изображение содержит информацию о поверхности с яркостным разделением объектов и фона, что значительно повышает точность последующей идентификации границ объектов.
При реализации приведенного способа очень важно, чтобы все изображения в одной серии были сопоставимы, что подразумевает неизменность ориентации объектов на изображениях и их масштаба. Для реализации указанных условий необходимо устройство, являющееся неотъемлемой частью заявленного изобретения.
Изобретение поясняется чертежами, которые не охватывают и, тем более не ограничивают весь объем притязаний данного технического решения, а являются лишь иллюстрирующими материалами частного случая выполнения:
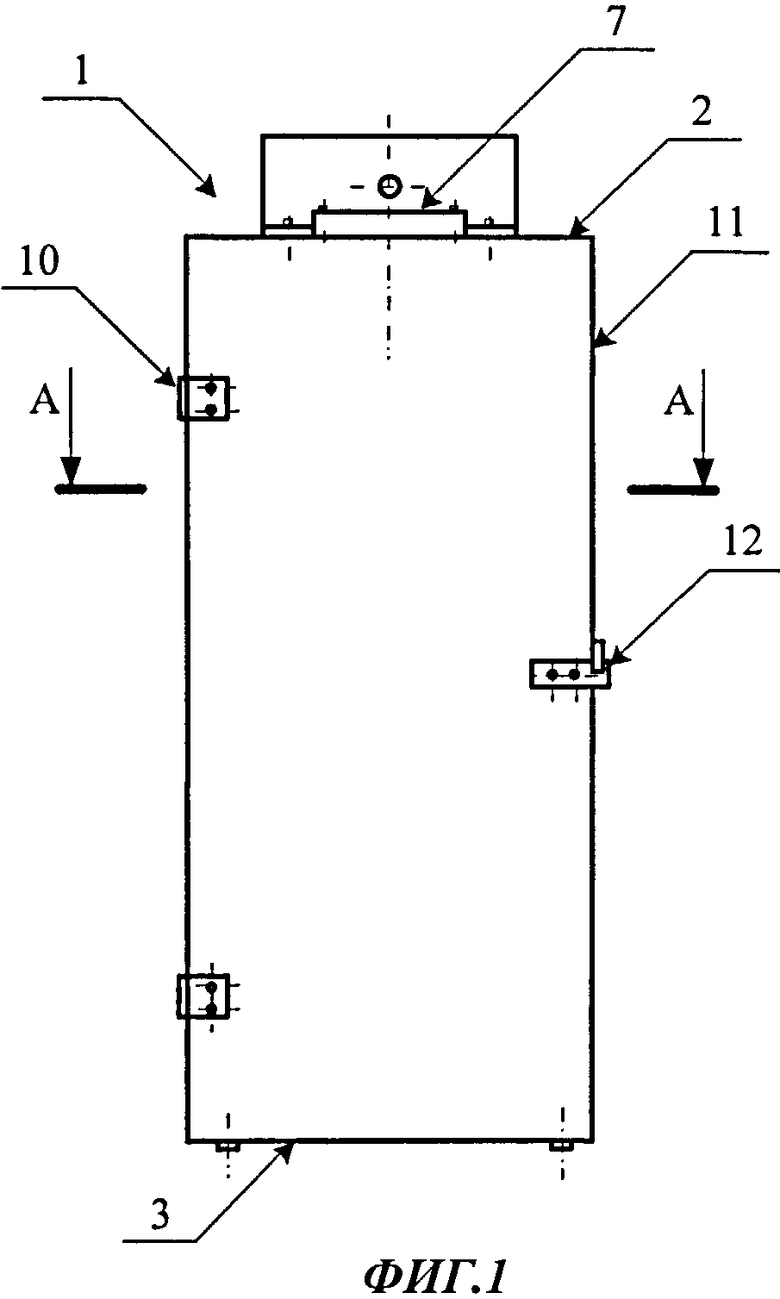
На фиг.1 - устройство для получения цифровых изображений поверхности пористых тел с яркостным разделением объектов и фона, вид спереди.
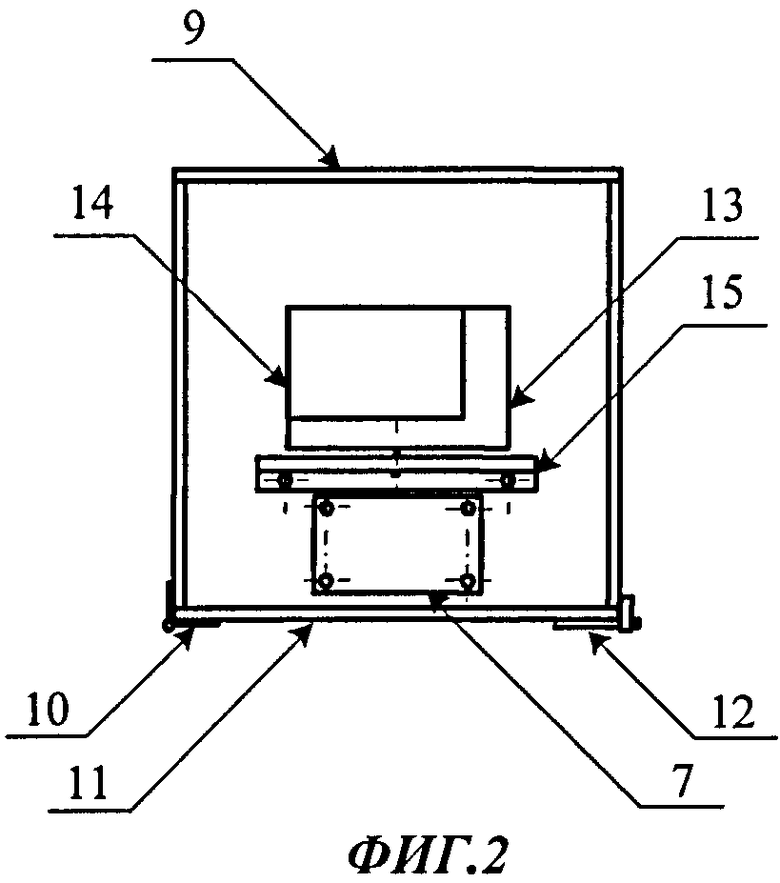
На фиг.2 - вид сверху устройства.
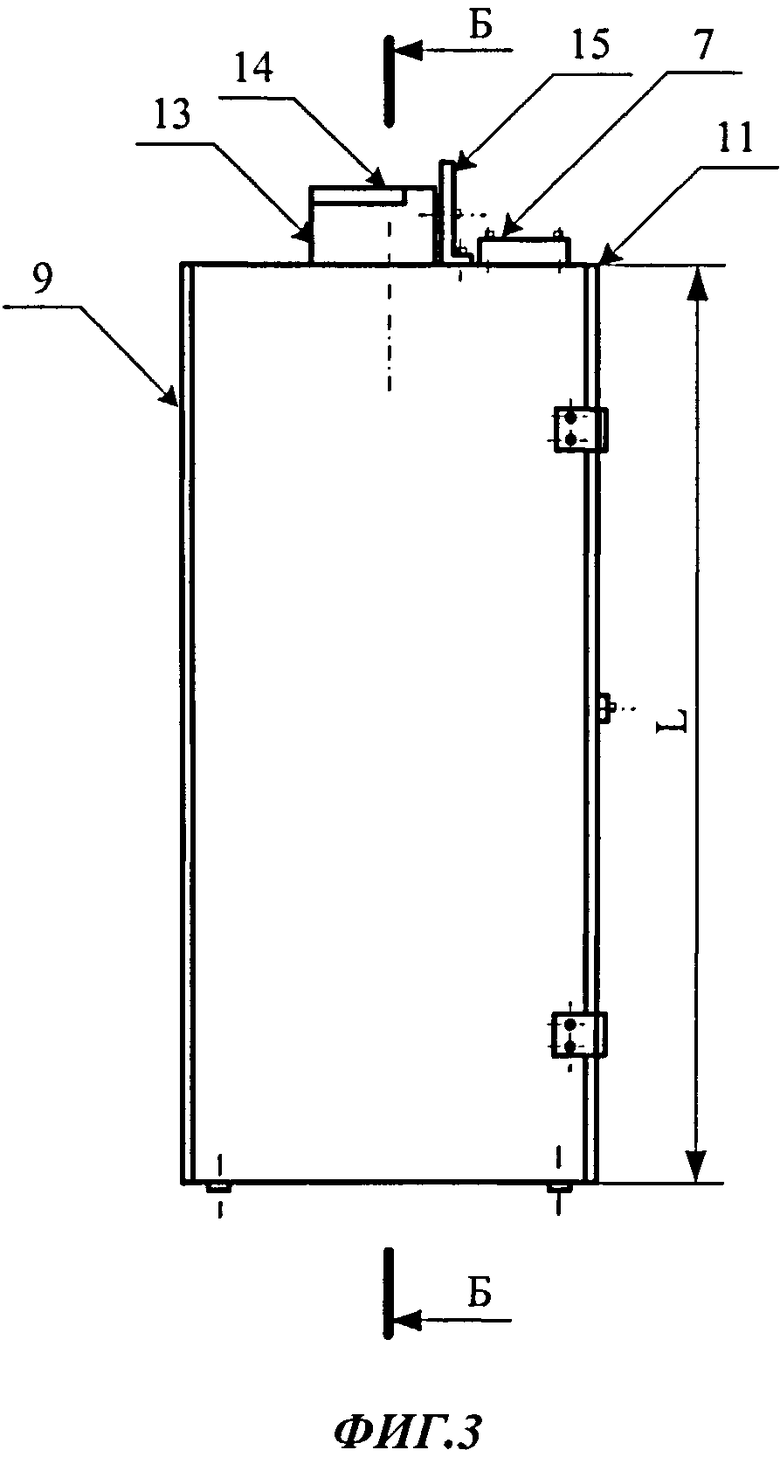
На фиг.3 - вид сбоку устройства.
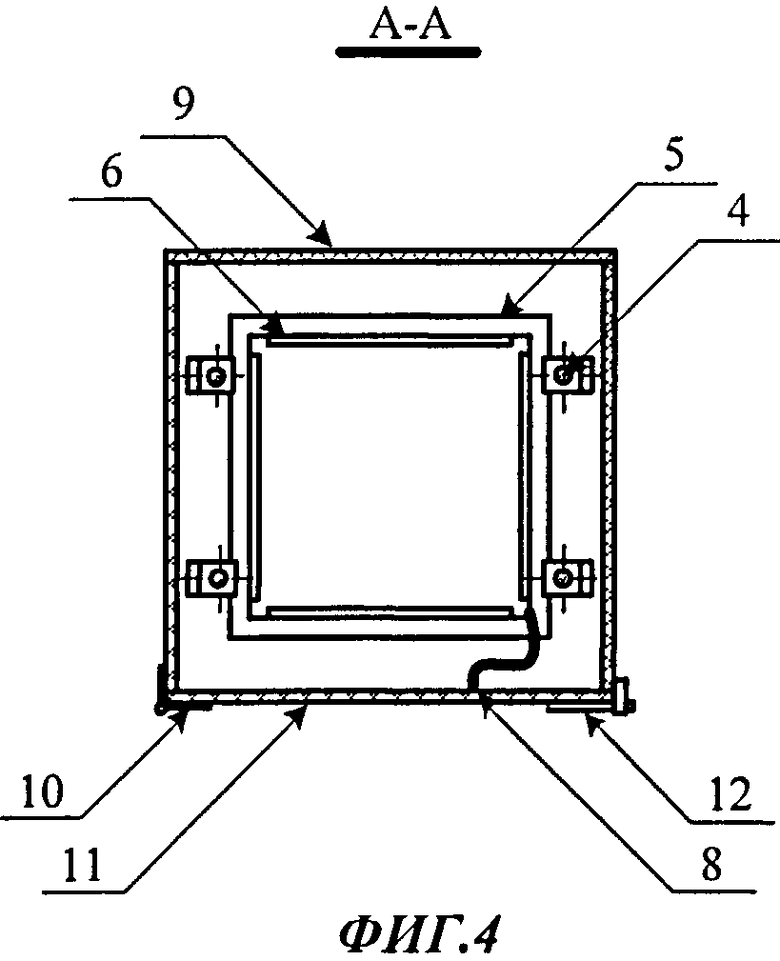
На фиг.4 - поперечный разрез А-А на фиг.1.
На фиг.5 - поперечный разрез Б-Б на фиг.3.
Устройство 1 для получения цифровых изображений поверхности пористых тел с яркостным разделением объектов и фона представляет собой систему из двух параллельных плоскостей 2 и 3, предпочтительно из листов ДСП, скрепленных жестко друг с другом системой стоек на расстоянии L. Верхняя плоскость предназначена для размещения системы получения цифрового изображения и панели управления освещением. Нижняя плоскость предназначена для размещения непосредственно или на предметном столике образца изучаемого материала. Между верхней и нижней плоскостями располагаются направляющие 4 с перемещаемой рамой 5, изготовленной, предпочтительно, из алюминия. На раме собрана система освещения 6, представляющая собой несколько независимых источников освещения, расположенных с различных сторон рамы в одной плоскости. Рама установлена параллельно верхней и нижней плоскостям. Питание и управляющие сигналы от блока управления 7 к системе освещения подаются посредством шлейфа 8 или кабеля. Пространство между верхней и нижней плоскостями закрыто кожухом 9, изготовленным, предпочтительно, из фанеры, и предназначенным для защиты исследуемого материала в устройстве от внешнего света. Передняя стенка устройства сделана на петлях 10 в виде дверцы 11 с замком 12 для фиксации.
Работа устройства осуществляется следующим образом. Исследуемый материал помещается на нижнюю плоскость или на предметный столик исследуемой поверхностью вверх. На блоке управления включается кнопка подачи напряжения, кнопками выбора режимов подается освещение на элементы осветительной системы. Раму на направляющих перемещают к исследуемой поверхности до высоты, обеспечивающей наилучшее разделение объектов и фона. Качество светотеневого выделения объектов отслеживают визуально.
Включают систему получения цифрового изображения, предпочтительно цифровой фотоаппарат 13 с электронным видоискателем 14, закрепленным болтовым соединением на стойке 15, с объективом 16, вставленным в отверстие 17 в верхней плоскости и расположенным перпендикулярно ей, и выполняют калибровку: на исследуемую поверхность помещают калибровочную линейку и делают снимок, в дальнейшем необходимый для установления масштаба.
После калибровки кнопками выбора режимов полностью выключают освещение и закрывают дверцу устройства. При помощи кнопок выбора режимов последовательно подают освещение на изучаемую поверхность с одной из возможных сторон и делают серию снимков при различном освещении, не меняя ориентации и положения объектива фотоаппарата. По завершении съемки выключают питание осветительной системы отключением кнопки подачи напряжения, выключают фотоаппарат, отснятые изображения переносят на ЭВМ и подвергают обработке описанным ранее способом.
Разработанные способ и устройство легко реализуемы на практике, обладают низкими ресурсо- и энергозатратами и позволяют без дополнительной обработки поверхности получать цифровые изображения исследуемого пористого тела с яркостным разделением объектов и фона при низких значениях шумов, что значительно увеличивает точность идентификации границ объектов различными градиентными методами.
Разработанный способ можно выделить в отдельный класс способов снижения негативного влияния шумов, реализующего как принципы программной обработки цифрового изображения, так и принципы физического выделения объектов путем применения светотеневого эффекта на поверхности тела. Являясь комплексным, он лишен недостатков способов первых двух классов и обладает преимуществом перед ними по скорости, точности и простоте реализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИССЛЕДОВАНИЯ И ИДЕНТИФИКАЦИИ ЖИВОПИСНЫХ ПРОИЗВЕДЕНИЙ КУЛЬТУРЫ | 2012 |
|
RU2533319C2 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ОБРАБОТКИ МАССИВА НЕОДНОРОДНЫХ ИЗОБРАЖЕНИЙ | 2021 |
|
RU2767281C1 |
| Способ распознавания объектов цифровой обработкой исходных изображений в градациях серого | 2023 |
|
RU2804304C1 |
| СПОСОБ ИССЛЕДОВАНИЯ И ДИАГНОСТИКИ СОСТОЯНИЯ БИОЛОГИЧЕСКОГО ОБЪЕКТА ИЛИ ЕГО ЧАСТИ | 2010 |
|
RU2462195C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ МЕТОДОМ НЕЧЕТКОЙ ТРИАНГУЛЯЦИИ ДЕЛОНЕ | 2018 |
|
RU2729557C2 |
| Способ автоматической сегментации флюорограмм грудной клетки больных пневмонией | 2016 |
|
RU2629629C1 |
| СПОСОБ ИССЛЕДОВАНИЯ И ДИАГНОСТИКИ СОСТОЯНИЯ БИОЛОГИЧЕСКОГО ОБЪЕКТА ИЛИ ЕГО ЧАСТИ | 2003 |
|
RU2295297C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИЧНОСТИ ЧЕЛОВЕКА ПО ЦИФРОВОМУ ИЗОБРАЖЕНИЮ ЛИЦА | 2009 |
|
RU2431191C2 |
| Автоматизированная система анализа ангиографических изображений глазного дна человека | 2018 |
|
RU2683758C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ СЕГМЕНТАЦИИ ПОЛУТОНОВЫХ СЛОЖНОСТРУКТУРИРОВАННЫХ РАСТРОВЫХ ИЗОБРАЖЕНИЙ | 2014 |
|
RU2580074C1 |
Изобретение относится к области изучения структуры пористых тел с использованием средств оптики и вычислительной техники. Техническим результатом является обеспечение высокого качества изображений границ объектов при низких ресурсо- и энергозатратах. Способ основан на получении серии сопоставимых цифровых изображений поверхности исследуемого материала, снятых при освещении с разных сторон, и последующей обработке на ЭВМ по специальному алгоритму. Исследование структурного состояния шлифованной поверхности изделия проводят в отраженном свете на специальном устройстве, позволяющем получать сопоставимые изображения при различных параметрах освещения. 2 н.п. ф-лы, 5 ил. 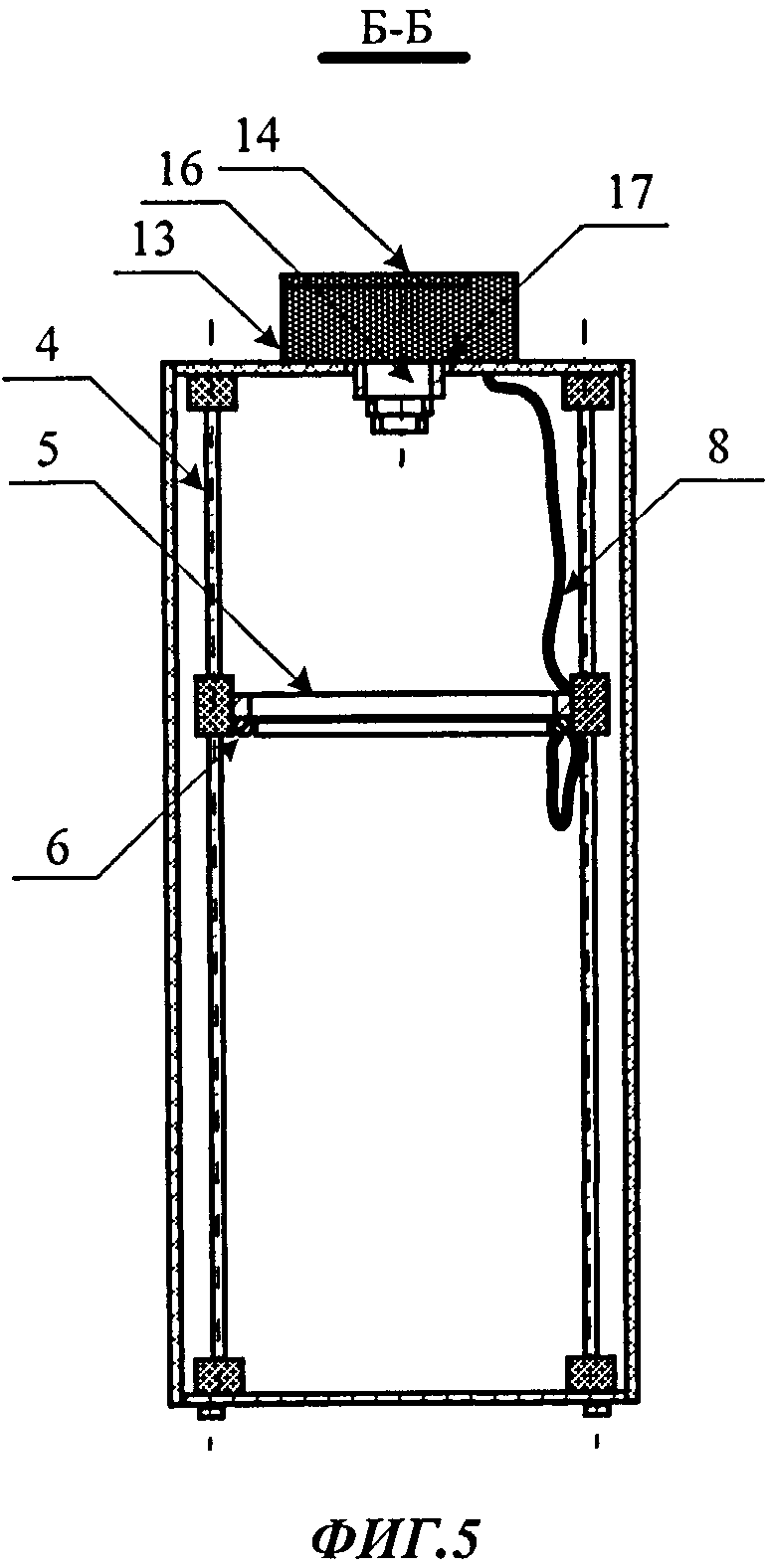
1. Способ получения цифровых изображений поверхности пористого тела с яркостным разделением объектов и фона, заключающийся в преобразовании оптических сигналов в электрические сигналы, их дискретизации, разбиении изображения объектов на дискретные элементы и вычислении интенсивности соответственно красной, зеленой и синей составляющих цвета для каждого пикселя изображения, отличающийся тем, что финальное изображение формируется из серии изображений, снятых при последовательном освещении с разных сторон падающими под углом к поверхности пористого тела световыми лучами, последовательном сравнении интенсивности красной, зеленой и синей составляющих каждого пикселя серии изображений и формировании нового изображения с пикселями, интенсивность которых наиболее близка к черному цвету среди соответствующих пикселей сравниваемой серии изображений.
2. Устройство для получения цифровых изображений поверхности пористого тела с яркостным разделением объектов и фона, содержащее систему получения цифрового изображения, предпочтительно цифровой фотоаппарат с электронным видоискателем, осветительную систему, блок управления и ЭВМ, отличающееся тем, что осветительная система размещена на перемещающейся раме, позволяющей изменять угол падения лучей, а блок управления позволяет выбирать сторону освещения поверхности изучаемого объекта.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОРИСТОСТИ МАТЕРИАЛОВ | 1993 |
|
RU2035035C1 |
| СПОСОБ КОНТРОЛЯ РЕЛЬЕФА ПОВЕРХНОСТИ | 2007 |
|
RU2368869C2 |
| US 4918739 A, 17.04.1990 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

