Изобретение относится к электроэнергетике, а именно к релейной защите энергообъектов. Оно касается организации срабатывания релейной защиты. Способ задания условий срабатывания охватывает, во-первых, вопросы, связанные с построением характеристик срабатывания на плоскостях замеров, и, во-вторых, те вопросы, что связаны с проверкой попадания текущего замера в область срабатывания. Характеристика срабатывания представляет собой граничную линию области срабатывания на плоскости замера [1, стр.417, 453].
Известно техническое решение, согласно которому входные сигналы релейной защиты преобразуются и отображаются на плоскости в виде двумерных (двухкоординатных) сигналов, а характеристика срабатывания реагирующего на них органа задается вне какой-либо связи с осуществляемым преобразованием [2]. Применительно к микропроцессорной релейной защите это техническое решение представлено в [3, 4]. Оно показало, что характеристика срабатывания может задаваться произвольно, и в этом его достоинство. Недостаток же заключается в том, что в стороне остался важнейший вопрос о механизме задания характеристики срабатывания.
Известен способ релейной защиты, рассматривающий проблему построения характеристик срабатывания как общую задачу обучения релейной защиты [5]. Учителями служат имитационные модели защищаемого объекта, которые воспроизводят режимы защищаемого объекта. Сигналы имитационных моделей преобразуются таким же образом, как и сигналы реального объекта. Основная цель обучения - определение граничных двумерных сигналов, которые на плоскости замера охватывают область срабатывания защиты, а вместе с ними определение граничных режимов - прообразов граничных двумерных сигналов; граничные режимы порождают сигналы имитационных моделей, преобразуемые в граничные двумерные сигналы.
Обсуждаемый способ оказался неполным. Остался нераскрытым вопрос о том, как следует задавать без ущерба для чувствительности защиты характеристику ее срабатывания. В прототипе, как и в аналогах, полагалось, что характеристикам придается полигональная форма, т.е. они образованы небольшим числом отрезков прямых линий. В результате исключается возможность учета в характеристиках срабатывания всего множества граничных двумерных сигналов.
Цель предлагаемого способа задания условий срабатывания релейной защиты заключается в предельно полном учете граничных сигналов, что имеет следствием повышение чувствительности релейной защиты.
Поставленная цель достигается тем, что известный способ задания условий срабатывания релейной защиты дополняется операциями, делающими возможным задание характеристики срабатывания на плоскости произвольным числом точек, каждая из которых ассоциируется с тем или иным граничным сигналом. Как и в прототипе, в предлагаемом способе разграничиваются операции, совершаемые в режиме обучения, когда на релейную защиту воздействуют сигналы имитационных моделей, и в рабочем режиме, когда защита реагирует на сигналы реального объекта. В обоих режимах совершается одно и то же преобразование входных сигналов в двумерный сигнал, который отображается на плоскости в виде точки. Координаты точки интерпретируются как горизонтальная и вертикальная составляющие двумерного сигнала. Разграничение режимов имеет следствием разграничение результатов преобразования наблюдаемых величин. В рабочем режиме на плоскости отображается текущий двумерный сигнал, а в режиме обучения - обучающий двумерный сигнал. Характеристика срабатывания задается с учетом расположения обучающих сигналов, а выполнение условий срабатывания проверяется путем сопоставления текущего сигнала с характеристикой срабатывания. Существо изобретения заключается в том, как задается характеристика срабатывания и как затем проверяется выполнение условий срабатывания. Характеристику задают в виде дискретной последовательности граничных двумерных сигналов. Граничные сигналы занимают особое место среди множества обучающих сигналов. Они находятся на границе области срабатывания, окаймляя ее. Область срабатывания образована множеством обучающих сигналов, за каждым из которых стоят определенные режимы имитационных моделей защищаемого объекта. Но из всех обучающих сигналов только граничные сигналы и стоящие за ними граничные режимы (прообразы) представляют интерес для построения характеристики срабатывания защиты. Более того, имеет место важная закономерность: прообраз сложной линии граничных сигналов представляет собой значительно более простую ломаную линию в пространстве режимов [6, 7]. В данном способе предлагается задавать характеристику срабатывания последовательностью граничных двумерных сигналов. Их число может быть взято настолько большим, насколько это требуется по условию сохранения чувствительности защиты на максимально возможном уровне. А поскольку в ходе обучения становятся известны все режимы - прообразы характеристики срабатывания, то число граничных точек становится варьируемой величиной и всегда может быть увеличено, если в этом возникнет необходимость.
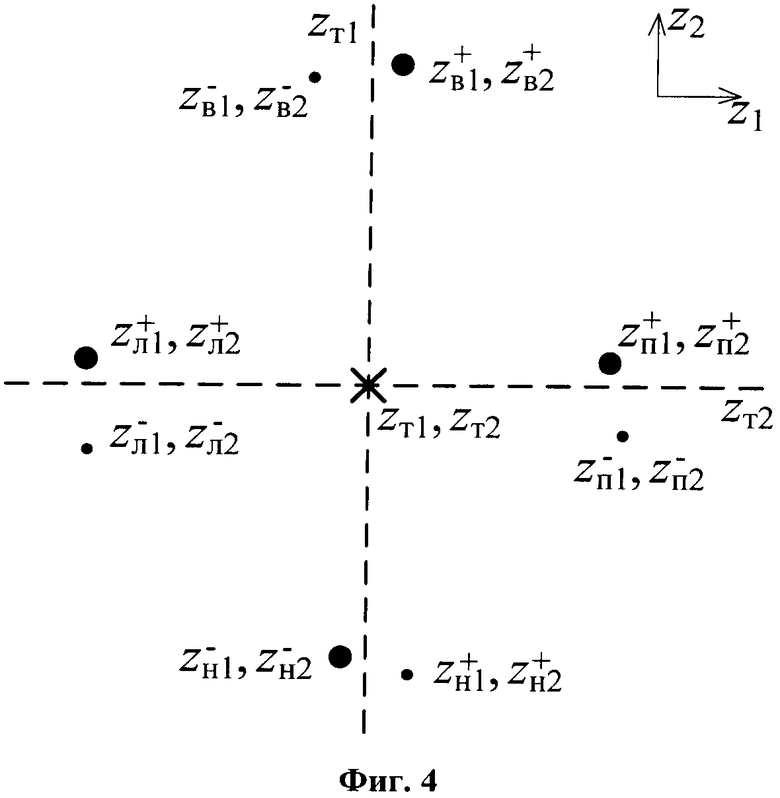
Обучение защиты завершается заданием характеристик срабатывания. Но способ задания условий срабатывания этим не ограничивается; предстоит еще определить операции, способные установить попадание текущего сигнала в область, охваченную характеристикой срабатывания. Предлагается выполнять проверку условий срабатывания путем сравнения составляющих текущего сигнала с соответствующими составляющими граничных сигналов четырех типов. Имея в виду положение граничных сигналов относительно текущего сигнала, выделены такие типы: верхний, нижний, левый и правый. Граничные сигналы верхнего и нижнего типа определяют как ближайшие по своим горизонтальным составляющим к горизонтальной составляющей текущего сигнала. Соответственно граничные сигналы правого и левого типа определяют как ближайшие по своим вертикальным составляющим к вертикальной составляющей текущего сигнала. Как следует из определения, верхние сигналы превосходят нижние по вертикальной составляющей, а правые превосходят левые по горизонтальной. Сами же условия срабатывания сводятся к сопоставлению составляющих текущего сигнала с соответствующими составляющими граничных сигналов четырех упомянутых типов. Условия срабатывания заключаются в том, что вертикальная составляющая текущего сигнала оказывается между вертикальными составляющими верхних и нижних граничных сигналов, в то время как горизонтальная составляющая помещается между горизонтальными составляющими правых и левых граничных условий.
В дополнительных пунктах формулы изобретения детализируются условия срабатывания для тех случаев, когда выбираются только по одному граничному сигналу каждого типа или же только по два сигнала.
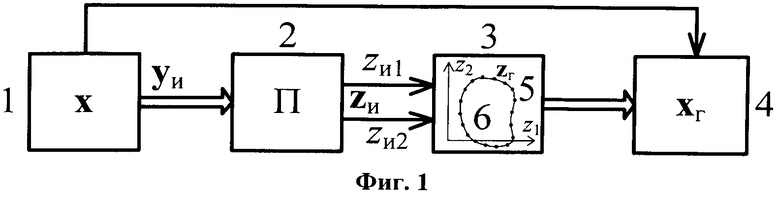
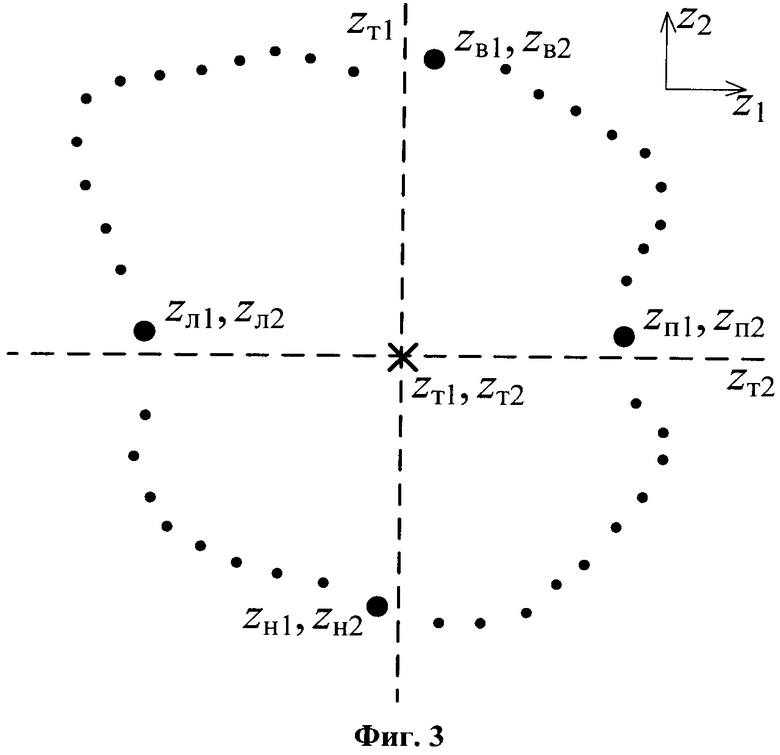
На фиг.1 изображена структурная схема релейной защиты в режиме обучения, а на фиг.2 - структурная схема защиты в рабочем режиме. На фиг.3 приведена иллюстрация характеристики срабатывания, заданной последовательностью граничных сигналов, и условий срабатывания с одним граничным сигналом каждого из четырех типов, на фиг.4 - с двумя сигналами каждого типа; на фиг.5 в увеличенном масштабе показана одна из деталей предыдущего рисунка.
Обучающая структура (фиг.1) состоит из имитационной модели 1 (моделей может быть больше), режим которой задается вектором ее варьируемых параметров x, преобразователя 2 многомерного вектора yи сигналов модели в двумерный обучающий сигнал zи с горизонтальной zи1 и вертикальной zи2 составляющими, реагирующего органа 3, работающего в режиме фиксации граничных сигналов zг, и блока граничных режимов 4, фиксирующего прообразы xг - параметры имитационной модели 1, режимы которой отобразились граничными сигналами zг. Множество граничных сигналов образует граничную линию 5, окаймляющую область 6 отображения режимов срабатывания, задаваемых имитационной моделью 1. Показанная на фиг.1 связь между моделью 1 и блоком 4 означает, что в последний поступает информация о всех вариациях параметров модели, но фиксируются только параметры, создавшие граничные режимы.
Рабочая структура (фиг.2) защищает энергообъект 7, получая информацию о его состоянии в виде многомерного вектора yт наблюдаемых сигналов. В нее входит тот же преобразователь 2, что и в схеме фиг.1, который на этот раз формирует двумерный сигнал zт с горизонтальной и вертикальной составляющими zт1 и zт2, реагирующий орган 8 с характеристикой срабатывания 9, задаваемой последовательностью граничных сигналов zс и логический выходной блок 10, проверяющий, выполняются ли условия срабатывания. Между реагирующим органом 3 в режиме обучения и реагирующим органом 7 в рабочем состоянии имеется принципиальная разница. В ходе обучения определяется большое число граничных сигналов zг (фиг.1). Для характеристики срабатывания 8 достаточно оставить лишь ту их часть zс (фиг.2), которая сохраняет основные черты граничной линии 5.
Процессом обучения релейной защиты управляет имитационная модель 1. Режим срабатывания задается вектором варьируемых параметров x и проявляется сигналами yи, а после их преобразования в блоке 2 - двумерным сигналом zи. Стратегия управления, т.е. изменения параметров модели 1, определяется целью обучения - построением граничной линии 5 области отображения режимов срабатывания 6.
В структуре по фиг.1 определение каждого конкретного граничного сигнала zг сопровождается фиксацией соответствующего вектора xг параметров имитационной модели 1 в блоке граничных режимов 4. Множество значений xг подразделяется на отрезки линий [6, 7], чаще всего прямых, и при хранении в памяти достаточно указать, какой из координат - элементов вектора xг - параллельна линия, а также начало и конец ее отрезка.
Характеристика срабатывания 9 образована частью граничных сигналов zг. Отдельное обозначение zс, введенное для сигналов этой части, объясняется тем, что каждый сигнал zг, востребованный характеристикой срабатывания, может быть подвергнут масштабированию из практических соображений, прежде всего с целью отстройки от неучтенных при обучении помех.
В рабочем режиме (фиг.2) на вход реагирующего органа 8 поступает текущий двумерный сигнал zт. В задачу выходного блока 10 входит принятие решения о том, попадает ли этот сигнал в область срабатывания. Простейшая модификация блока 10 действует в соответствии с иллюстрацией на фиг.3. Более сложная, но позволяющая обойтись меньшим числом граничных сигналов, проиллюстрирована на фиг.4. В основе работы блока 10 лежит принцип отбора сигналов характеристики срабатывания 9 для сравнения с ними текущего сигнала zт. Каждый двумерный сигнал имеет горизонтальную и вертикальную составляющие z1 и z2. У сигнала zт имеются составляющие zт1 и zт2. Из всех сигналов характеристики срабатывания 9 отбираются четыре отдельных сигнала (фиг.3) или четыре пары сигналов (фиг.4) верхнего, нижнего, правого и левого типа. Сигналы каждого типа выбираются из подмножества граничных сигналов характеристики срабатывания, отвечающих условиям




где индексы “в”, “н”, “п” и “л” обозначают соответствующие типы. Единственный сигнал каждого типа (фиг.3) должен отвечать дополнительному требованию




где zв, zн, zп и zл - сигналы, отвечающие соответственно условиям (1), (2), (3), (4). Операции (5)-(8) оставляют из всего множества всего четыре сигнала, которые отмечены на фиг.3 крупными точками, и условия срабатывания сводятся к последним четырем операциям сравнения




в которых задействованы только эти оставшиеся сигналы.
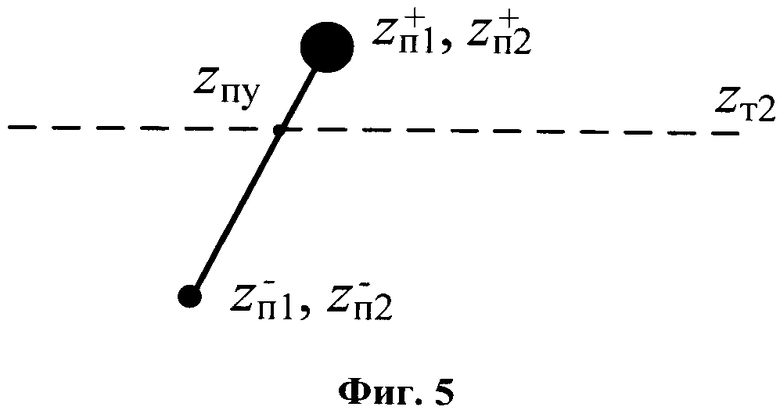
Во второй своей модификации (фиг.4) выходной блок 10 дополняет сигнал, подобранный по каждому из условий (5)-(8), его парой по правилу разных знаков

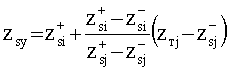
где i=1, 2, верхние индексы различают сигналы в паре, s=в, н, п, л - общее обозначение стороны на той плоскости, где задается характеристика срабатывания. Каждая пара сигналов задает свою уставку. Правило ее определения проиллюстрировано на фиг.5 для пары сигналов правой стороны. Уставка zпу определяется координатой точки пересечения двух прямых линий, одна соединяет точки 

откуда следует выражение уставки
которое обобщается и для других сторон формулой

где j - индекс второго сигнала в паре: если i=1, то j=2, а если i=2, то j=1.
Условия срабатывания отличаются от (9)-(12) только правыми частями:




Предложенный способ легко реализуется в микропроцессорных терминалах релейной защиты. Значительную часть его операций составляет сравнение составляющих сигналов zс, образующих характеристику срабатывания, и составляющих текущего сигнала zт. Это операции (1)-(4), а также операции перебора текущих сигналов (5)-(8), проверки условий срабатывания (9)-(12) или (15)-(18) и операция сравнения знаков (13). Несколько сложнее операция определения уставок (14), но она выполняется только четырежды и только во второй модификации задания условий срабатывания.
Способ универсален в том отношении, что он не привязан ни к конкретным объектам, ни к конкретному виду релейной защиты. В нем удалось объединить операции обучения релейной защиты и ее перевода в рабочий режим.
Источники информации
1. Чернобровов Н.В., Семенов В.А. Релейная защита энергетических систем. - М.: Энергоатомиздат, 1998.
2. Авторское свидетельство СССР №346744, H02H 3/40, 1970.
3. Авторское свидетельство СССР №1150696, H02H 3/40, 1982.
4. Гильденберг Б.М. Алгоритмы реализации типовой характеристики измерительного органа дистанционной защиты. - Электротехн. устр-ва и системы на основе микропроцессоров и микроЭВМ: Межвуз. сб. - Чебоксары: изд. Чуваш, ун-та, 1985, с.94-99.
5. Патент РФ №2404499, H02H 3/40, 2009.
6. Лямец Ю.Я., Кержаев Д.В., Нудельман Г.С., Романов Ю.В. Граничные режимы в методике обучения релейной защиты. Ч.1, 2, 3. - Изв. вузов. Электромеханика, 2009, №4, с.24-30; 2010, №2, с.53-59; №4, с.53-58.
7. Лямец Ю.Я., Мартынов М.В., Нудельман Г.С., Романов Ю.В., Воронов П.И. Обучаемая релейная защита. - Электричество, 2012, ч.1, 2, №2, с.15-19, №3, с.12-18.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОЙ ЗАЩИТЫ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2014 |
|
RU2553448C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЭНЕРГООБЪЕКТА | 2010 |
|
RU2450402C2 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЭНЕРГООБЪЕКТА | 2009 |
|
RU2404499C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЭНЕРГООБЪЕКТА | 2017 |
|
RU2654056C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ДАЛЬНЕГО РЕЗЕРВИРОВАНИЯ | 2016 |
|
RU2638548C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЭНЕРГООБЪЕКТА | 2015 |
|
RU2594361C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЭНЕРГООБЪЕКТА | 2006 |
|
RU2316871C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ТРАНСФОРМАТОРА | 2016 |
|
RU2643779C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СЛОЖНОГО ПОВРЕЖДЕНИЯ ЭЛЕКТРИЧЕСКОЙ СИСТЕМЫ | 2010 |
|
RU2444829C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ТРЕХФАЗНОГО ТРАНСФОРМАТОРА | 2017 |
|
RU2655920C1 |
Изобретение из области электроэнергетики касается построения микропроцессорной релейной защиты, а именно этапов ее обучения, задания характеристики срабатывания и функционирования в рабочем режиме. Обучение осуществляется от имитационных моделей защищаемого объекта. Входные величины защиты преобразуют в двумерный сигнал, отображаемый на плоскости. Обучающие двумерные сигналы определяют область срабатывания защиты. Технический результат - повышение чувствительности защиты путем полного учета особенностей области срабатывания. Предлагается задавать характеристику в виде последовательных граничных двумерных сигналов, охватывающих область срабатывания защиты. Изобретение указывает операции, задающие условия срабатывания защиты, если характеристика срабатывания носит дискретную форму, т.е. состоит из отдельных точек на плоскости. Текущий двумерный сигнал, поступающий от реального объекта, сравнивают с четырьмя типами граничных сигналов, располагающихся на плоскости соответственно выше, ниже, правее и левее текущего сигнала. В дополнительных пунктах формулы изобретения раскрываются модификации условий срабатывания. В первой модификации ограничиваются только одним граничным сигналом каждого из четырех типов, а во второй - двумя, т.е. четырьмя парами сигналов, и каждая пара задает свою уставку срабатывания по своему направлению. 2 з.п. ф-лы, 5 ил.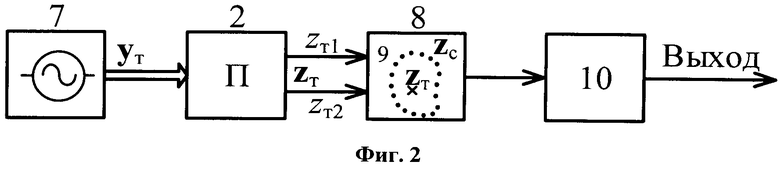
1. Способ задания условий срабатывания релейной защиты, на входы которой в рабочем режиме подают сигналы от защищаемого объекта, а в режиме обучения - от его имитационных моделей, включающий в себя преобразование входных сигналов в отображаемый на плоскости двумерный сигнал с горизонтальной и вертикальной составляющими, сигналов защищаемого объекта - в текущий двумерный сигнал, а сигналов имитационных моделей - в обучающий двумерный сигнал, задания характеристики срабатывания с учетом расположения обучающих сигналов и проверки выполнения условий срабатывания путем сопоставления текущего сигнала с характеристикой срабатывания, отличающийся тем, что, с целью повышения чувствительности, характеристику срабатывания задают в виде последовательности граничных двумерных сигналов, охватывающих область обучающих сигналов, а выполнение условий срабатывания проверяют путем сравнения составляющих текущего сигнала с соответствующими составляющими граничных сигналов четырех типов - верхних, нижних, правых и левых; верхние и нижние определяют как ближайшие по своим горизонтальным составляющим к горизонтальной составляющей текущего сигнала, правые и левые - как ближайшие по своим вертикальным составляющим к вертикальной составляющей текущего сигнала, причем верхние превосходят нижние по вертикальной составляющей, а правые превосходят левые по горизонтальной, и принимают, что условия срабатывания выполнены, если вертикальная составляющая текущего сигнала оказывается между вертикальными составляющими верхних и нижних граничных сигналов, а горизонтальная составляющая текущего сигнала - между горизонтальными составляющими правых и левых граничных сигналов.
2. Способ по п.1, отличающийся тем, что текущий сигнал сопоставляют только с одним граничным сигналом каждого из четырех типов и условия срабатывания сводят к сравнению составляющих текущего сигнала с соответствующими составляющими граничного сигнала каждого типа:
zт2≤zв2, zт2≥zн2,
zт1≤zп1, zт1≥zл1,
где “в”, “н”, “л” и “п” - индексы верхнего, нижнего, левого и правого граничных сигналов, “т” - индекс текущего сигнала, а индексами 1 и 2 отмечены соответственно горизонтальная и вертикальная составляющие.
3. Способ по п.1, отличающийся тем, что текущий сигнал сравнивают с четырьмя парами граничных сигналов разных типов, причем пару составляют из граничных сигналов, близких по соответствующей составляющей к текущему сигналу, но расположенных по разные стороны от него, и условия срабатывания сводят к сравнению составляющих текущего сигнала с четырьмя уставками:
zтi≤zsy, s=в, п,
zтi≥zsy, s=н, л,
где s - индекс стороны на плоскости сигналов, “y” - индекс уставки; i, j - индексы составляющих: если i=1, то j=2, а если i=2, то j=1; верхними индексами отмечены граничные сигналы, располагающиеся по разные стороны от соответствующей составляющей текущего сигнала.
| СПОСОБ ДИСТАНЦИОННОЙ ЗАЩИТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2002 |
|
RU2248077C2 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЭНЕРГООБЪЕКТА | 2009 |
|
RU2404499C1 |
| US5426590A1, 20.06.1995 | |||

