Предлагаемые способ и устройство относятся к технике связи и радиолокации и могут быть использованы для сличения шкал времени, разнесенных на большие расстояния.
Известны способы и устройства синхронизации часов (авт. свид. СССР №№591.799, 614.416, 970.300, 1.180.835, 1.244.632, 1.278.800; патенты РФ №№2.001423, 2.003.157, 2.040.035, 2.146.833, 2.177.167, 2.301.437, 2.310.221, 2.383.914; патент США №7.327.699; патент Великобритании №1.517.661; патент Германии №3.278.943; патент ЕР №0.564.220; Губанов B.C., Финкельштейн A.M., Фридман П.А. Введение в радиоастрометрию. - М., 1983 и другие).
Из известных наиболее близкими к предлагаемым являются «Способ синхронизации часов и устройство для его реализации» (патент РФ №2.383.914, G04C 11/02, 2008), которые и выбраны в качестве прототипов.
Указанные способ и устройство обеспечивают сличение шкал времени, разнесенных на большое расстояние, и основаны на использовании дуплексного метода связи через геостационарный ИСЗ-ретранслятор и корреляционной обработке шумоподобных сигналов.
Основное достоинство дуплексного метода связи состоит в том, что в нем исключается длина трассы прохождения сигнала. Поэтому его точность в основном зависит от параметров бортового ретранслятора, типа используемого сигнала и техники измерения временных интервалов.
Для измерения временных интервалов используется корреляционная обработка шумоподобных сигналов, которые имеют ряд достоинств, одним из которых является хорошее свойство корреляционной функции R(τ) указанных сигналов: она имеет относительно высокий уровень центрального лепестка и низкий уровень боковых лепестков.
Следует отметить, что ИСЗ-ретранслятор, размещенный на геостационарной орбите, под действием различных дестабилизирующих факторов совершает определенные движения относительно предполагаемого устойчивого положения. Поэтому корреляционную обработку шумоподобных сигналов целесообразно проводить с использованием корреляционной экстремальной системы.
В указанной системе вычисляется корреляционная функция R(τ) между зондирующим и ретранслированными шумоподобными сигналами и отслеживается перемещение ее экстремума вдоль оси абсцисс. Процесс слежения осуществляется с помощью беспоисковой системы экстремального регулирования. Положение экстремума корреляционной функции R(τ) на оси абсцисс может быть определено с высокой точностью.
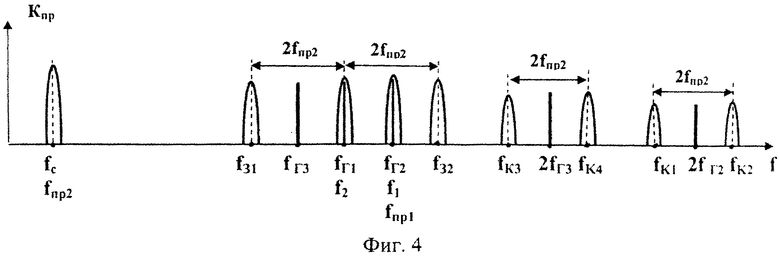
Для практической реализации известных технических решений используется супергетеродинный приемник, в котором одно и то же значение второй промежуточной частоты fпр2 может быть получено в результате приема сигналов на двух частотах f2 и fз2, т.е.
fпр2=fг2-f2 и fпр2=fз2-fг2.
Следовательно, если частоту настройки f2 принять за основной канал приема, то наряду с ним будет иметь место зеркальный канал приема, частота fз2 которого отличается от частоты f2 на 2fпр2 и расположена симметрично (зеркально) относительно частоты второго гетеродина fг2 (фиг.4).
Преобразование по зеркальному каналу приема происходит с тем же коэффициентом преобразования Кпр, что и по основному каналу. Поэтому он наиболее существенно влияет на избирательность и помехоустойчивость приемника.
Кроме зеркального, существуют и другие дополнительные (комбинационные) каналы приема. В общем виде любой комбинационный канал приема имеет место при выполнении следующего условия:
fпр2=|±mfki±fг2|,
где fki - частота i-го комбинационного канала приема;
m, n, i - целые положительные числа.
Наиболее вредными комбинационными каналами приема являются каналы, образующиеся при взаимодействии несущей частоты f2 принимаемого сигнала с гармониками частот fг2 второго гетеродина малого порядка (второй, третьей и т.д.), так как чувствительность приемника по этим каналам близка к чувствительности основного канала. Так, двум комбинационным каналам при m=1 и n=2 соответствуют частоты
fk1=2fг2-fпр2 и fk2=2fгu2+fпр2.
Наличие ложных сигналов (помех), принимаемых по зеркальному и комбинационным каналам, приводят к снижению помехоустойчивости и точности синхронизации удаленных шкал времени.
Технической задачей изобретения является повышение помехоустойчивости и точности синхронизации удаленных шкал времени путем подавления ложных сигналов (помех), принимаемых по зеркальному и комбинационным каналам.
Поставленная задача решается тем, что способ синхронизации часов, основанный, в соответствии с ближайшим аналогом, на одновременном приеме разнесенными наземными пунктами шумоподобных СВЧ-сигналов с борта искусственного спутника Земли, когерентном их преобразовании к видеочастоте, цифровой регистрации принятых сигналов и определении временной задержки прихода одного и того же сигнала в пункты синхронизации методом корреляционной обработки зарегистрированных сигналов, по величине которой производится сличение шкал времени, при этом в начальный момент времени ti по часам первого пункта с помощью кодовой последовательности формируют шумоподобный СВЧ-сигнал, регистрируют его на этом же пункте, сформированный сигнал преобразуют на частоту f1, усиливают его по мощности, излучают усиленный сигнал в направлении на искусственный спутник Земли - ретранслятор, в тот же момент времени t1 по часам второго пункта с помощью такой же кодовой последовательности формируют такой же шумоподобный СВЧ-сигнал, регистрируют его на втором пункте, принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте f1, переизлучают его на первый и второй пункты на частоте f2 с сохранением фазовых соотношений, в произвольный момент времени t3 по часам второго пункта аналогично формируют и регистрируют шумоподобный СВЧ-сигнал, сформированный сигнал преобразуют на частоту f1, усиливают его по мощности, излучают усиленный сигнал в направлении того же ИСЗ-ретранслятора, в тот же момент времени t3 по часам первого пункта с помощью той же кодовой последовательности формируют такой же шумоподобный СВЧ-сигнал, регистрируют его на первом пункте, принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте f1 и переизлучают его на первый и второй пункты на частоте f2 с сохранением фазовых соотношений, зарегистрированный зондирующий сигнал пропускают через блок регулируемой задержки, перемножают его с зарегистрированным ретранслированным сигналом, выделяют низкочастотное напряжение, формируя тем самым корреляционную функцию R(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают корреляционную функцию R(τ) на максимальном уровне, фиксируют временную задержку τi (i=1, 2, 3, 4) между двумя парами зарегистрированных зондирующих и ретранслируемых сигналов, по величине которой производится сличение шкал времени, отличается от ближайшего аналога тем, что принимаемый сигнал на несущей частоте f2 преобразуют по частоте с использованием частот fг2 и fг3 второго и третьего гетеродинов, которые разносят на удобное значение второй промежуточной частоты
fг2-fг3=2fпр2,
и выбирают симметричными относительно частоты f2 основного канала приема
f2-fг3=fг2-f2,
выделяют напряжение второй промежуточной частоты
fпр2=f2-fг3 и fпр2=fг2-f2,
подвергают их корреляционной обработке, формируют напряжение U(τ), пропорциональное корреляционной функции R(τ), сравнивают его с пороговым напряжением и в случае его превышения формируют постоянное напряжение, которое используют для разрешения дальнейшей обработки первого напряжения второй промежуточной частоты.
Поставленная задача решается тем, что устройство синхронизации часов, содержащее, в соответствии с ближайшим аналогом, ИСЗ-ретранслятор, первый и второй наземные пункты, каждый из которых содержит последовательно включенные эталон временим и частоты, первый гетеродин, первый смеситель, второй вход которого через переключатель соединен с первым выходом генератора псевдослучайного сигнала, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемо-передающей антенной, второй усилитель мощности, второй смеситель, второй вход которого через второй гетеродин соединен с первым выходом эталона времени и частоты, и первый усилитель второй промежуточной частоты, последовательно включенные второй клиппер, второй вход которого соединен с третьим выходом эталона времени и частоты, второй блок памяти и первый коррелятор, при этом ко второму выходу генератора псевдослучайного сигнала последовательно подключены первый клиппер, второй вход которого соединен с вторым выходом эталона времени и частоты и первый блок памяти, выход которого подключен к второму входу первого коррелятора, который выполнен в виде последовательно подключенных к выходу первого блока памяти блока регулируемой задержки, перемножителя, второй вход которого соединен с выходом второго блока памяти, фильтра нижних частот и экстремального регулятора, выход которого соединен с вторым входом блока регулируемой задержки, к второму выходу которого подключен микропроцессор, отличается от ближайшего аналога тем, что оно снабжено третьим гетеродином, третьим смесителем, вторым усилителем второй промежуточной частоты, вторым коррелятором, пороговым блоком и ключом, причем к выходу второго усилителя мощности последовательно подключены третий смеситель, второй вход которого соединен с выходом третьего гетеродина, второй усилитель второй промежуточной частоты, второй коррелятор, второй вход которого соединен с выходом первого усилителя второй промежуточной частоты, пороговый блок и ключ, второй вход которого соединен с выходом первого усилителя второй промежуточной частоты, а выход подключен к первому входу второго клиппера, частоты fг2 и fг3 второго и третьего гетеродинов разнесены на удвоенное значение второй промежуточной частоты
fг2-fг3=2fпр2
и выбраны симметричными относительно частоты f2 основного канала приема
f2-fг3=fг2-f2=fпр2.
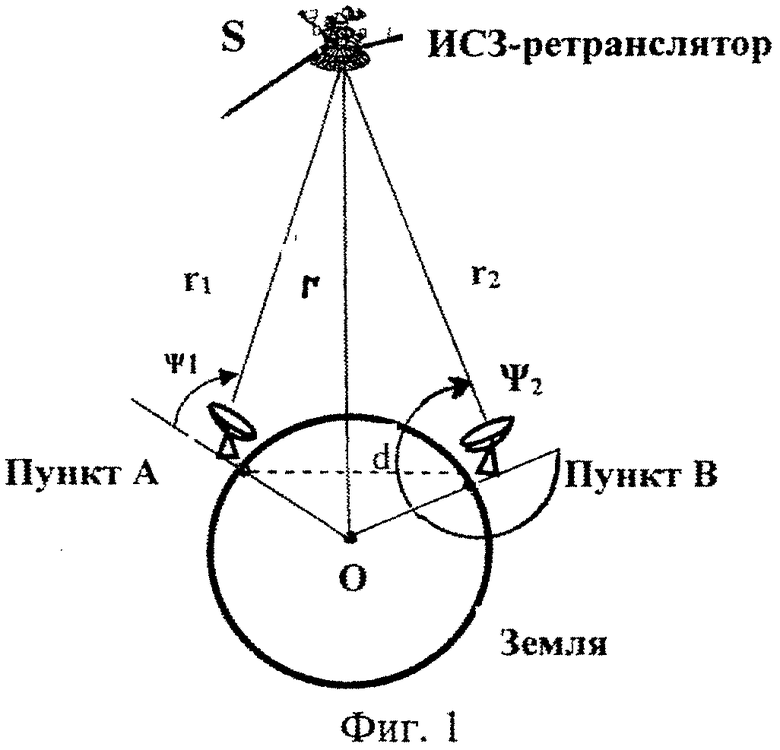
Геометрическая схема расположения наземных пунктов А и В и ИСЗ-ретранслятора S изображена на фиг.1, где введены следующие обозначения: О - центр масс Земли; d - база интерферометра; r - радиус - вектор ИСЗ.
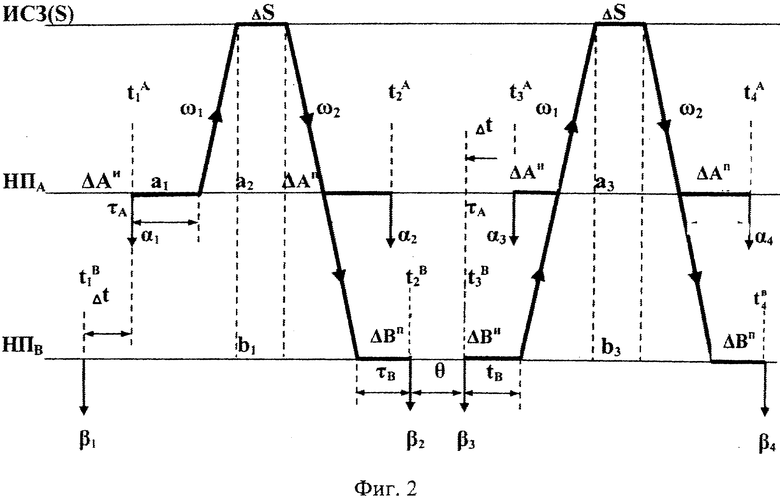
Временная диаграмма дуплексного метода сличения часов представлена на фиг.2, где введены следующие обозначения: S, А, В - шкалы времени ИСЗ-ретранслятора и пунктов А и В соответственно. Структурная схема устройства синхронизации, реализующей предлагаемый способ синхронизации часов, представлен на фиг.3. Частотная диаграмма, иллюстрирующая преобразование сигналов, показана на фиг.4.
Синхронизация часов по предлагаемому способу осуществляется следующим образом:
- в момент времени t1 А по часам первого пункта А с помощью кодовой последовательности формируют шумовой СВЧ-сигнал (сигнал α1);
- регистрируют его на этом же пункте;
- сформированный сигнал преобразуют на частоту f1;
- усиливают его по мощности;
- излучают усиленный сигнал в направлении на ИСЗ-ретранслятор;
- в тот же момент времени t1 А=t1 В по часам второго пункта В с помощью той же кодовой последовательности формируют такой же шумовой СВЧ-сигнал (сигнал β1);
- регистрируют его на втором пункте В (сигнал β1, который однако, не отправляют на ретрансляцию);
- принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте f1 (сигнал α1);
- переизлучают его в пунктах А и В на частоте f2 с сохранением фазовых соотношений на интервале tc;
- принимают ретранслированный сигнал в обоих пунктах;
- преобразуют его на видеочастоту;
- регистрируют его в моменты времени t2 A и t2 B соответственно (сигналы α2, β2);
- в произвольный момент времени t3 B=t2 B+Θ по часам второго пункта аналогично формируют и регистрируют шумовой СВЧ-сигнал (сигнал β3);
- сформированный сигнал преобразуют на частоту f1;
- усиливают его по мощности;
- излучают усиленный сигнал в направлении того же ИСЗ-ретранслятора;
- в тот же момент времени t3 B=t3 A по часам первого пункта А с помощью той же кодовой последовательности формируют такой же шумовой СВЧ-сигнал (сигнал α3);
- регистрируют его на первом пункте А (сигнал α3, который, однако, не ретранслируют);
- принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте f1 (сигнал α3);
- переизлучают его на пункты А и В на частоте f2 с сохранением фазовых соотношений;
- принимают ретранслированный сигнал на обоих пунктах;
- преобразуют его на видеочастоту;
- регистрируют в моменты времени 

Корреляционной обработкой двух пар зарегистрированных сигналов в измерителе 17 определяют на каждом пункте следующие временные задержки:
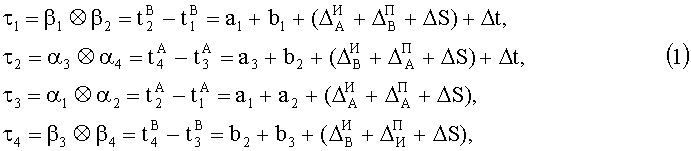
и соответствующие им частоты интерференции Fi (i=1, 2, 3, 4), которые определяют производные этих задержек:
где 
аj, b1(j=1, 2, 3) - время распространения сигнала между ИСЗ и пунктами А и В соответственно (фиг.1);




Δs - задержка сигналов в бортовом ретрансляторе ИСЗ;
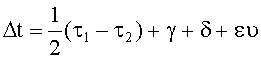
Δt=tВ-tА - искомая разность показаний часов в один и тот же физический момент;
Полагая aj и bj линейными функциями с производными 

где


ΔА,В', ΔA,В'' - задержки сигнала в атмосфере на частотах f1 и f2 соответственно;
ν - релятивистская поправка (эффект Саньяка);
с - скорость света;
ω - угловая скорость вращения Земли;
Д - площадь четырехугольника OA'SB', образуемого в экваториальной плоскости центром масс Земли, проекциями пунктов А и В и ИСЗ-ретранслятора.
Поправку γ за подвижность ИСЗ-ретранслятора во времени единичного измерения проще всего свести к нулю соответствующим выбором свободного параметра θ.

Атмосферная поправка ε также учитывается.
Оценим ошибки измерения временных задержек τI (i=1, 2, 3, 4).
Радиоинтерферометрическое отношение сигнал/шум составит
а ошибки измерения временной задержки τ и частоты интерференции F имеют вид
где Δf - полоса принимаемых и регистрируемых частот псевдошумового сигнала;
Рс, Рш - мощности сигнала и шума на входе приемника;
tc - интервал когерентности сигнала при его ретрансляции.
Тогда для получения ошибки στ=0,1 нс необходимо, чтобы QΔf≥5·109. Например, при Δf=10 МГц получаем Q≥500, что вполне достижимо даже при использовании наземных приемо-передающих антенн малого диаметра.
Для Q=500, Δf=10 МГц и 
Что касается ошибки измерения частоты интерференции F, то при использовании в качестве ретранслятора ИСЗ-геостационара обычно выполняются следующие ограничения: 
Структурная схема аппаратуры одного из пунктов (А), реализующей предлагаемый способ синхронизации часов, представлена на фиг.3, где введены следующие обозначения: 1 - стандарт частоты и времени, 2 - блок гетеродинов - первый 2.1 и второй 2.2 гетеродины, 2.3 третий гетеродин, 4 - переключатель, 5, 13, 24 - смесители, 6, 14, 25 - усилители промежуточной частоты, 7, 12 - усилители мощности, 8 - дуплексер, 9 - приемо-передающая антенна, 10, 15 - клипперы, 11, 16 - буферные запоминающие устройства, 17 - измеритель задержки и их производных, измеритель 17 задержек содержит блок 18 регулируемой задержки, перемножитель 19, фильтр 20 нижних частот, экстремальный регулятор 21, микропроцессор 22, второй коррелятор 26, 27 - пороговый блок и 28 - ключ.
Принцип работы аппаратуры заключается в следующем.
На первом шаге единичных измерений псевдошумовой сигнал α1 (фиг.2), созданный генератором 3 с помощью стандарта 1 частоты и времени
uc(t)=Uccos[2πfct+φk(t)+φc], 0≤t≤Тc,
где Uc, fc, φc, Tc - амплитуда, несущая частота, начальная фаза и длительность сигнала;
φk(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с кодовой последовательностью M(t), причем φk(t)=const или kτЭ<t<(k+1)τЭ и может изменяться скачком при t=kτЭ, т.е. на границах между элементарными посылками (k=1, 2, …, N-1);
τЭ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс(Тс=МτЭ).
Указанный сигнал поступает на вход клиппера 10, а затем регистрируется в буферном запоминающем устройстве 11. Регистрация синхронизируется стандартом 1 частоты и времени.
Сформированный сигнал uc(t) через замкнутый переключатель 4 поступает на первый вход первого смесителя 5, на второй вход которого подается напряжение первого гетеродина 2.1
uГ1(t)=UГ1cos(2πfГ1-φГ1).
На выходе смесителя 5 образуются напряжения комбинационных частот. Усилителем 6 выделяется напряжение первой промежуточной (суммарной) частоты
ugh1(t)=Uпр1cos[2πfпр1t+φk(t)+φпр1], 0≤t≥Tc,
где 
fпр1=fГ1+fс - первая промежуточная (суммарная) частота;
φпр1=φГ1+φс,
которое после усиления в усилителе 7 мощности через дуплексер 8 поступает в приемо-передающую антенну 9 и излучается ею в направлении ИСЗ-ретранслятора на частоте f2=fпр1.
В тот же момент времени 
Принимаемый бортовой аппаратурой ИСЗ-ретранслятора на частоте f1 (сигнал α1), переизлучают его на пункты А и В на частоте f2 с сохранением фазовых составляющих на интервале tc.
Ретранслированный сигнал (сигнал α1) на частоте f2
u2(t)=U2cos[2πf2t+φk(t)+φ2], 0≤t≤Tc.
принимается приемо-передающей антенной 9 и через дуплексер 8 и усилитель 12 мощности поступает на первые входы второго 13 и третьего 24 смесителей. На вторые входы смесителей 13 и 24 подаются соответственно напряжения гетеродинов 22 и 23:
uГ2(t)=UГ2cos(2πfГ2t+φГ2),
UГ3(t)=UГ3cos(2πfГ3t+φГ3).
Причем частоты fГ2 и fГ3 указанных гетеродинов разнесены на удвоенное значение второй промежуточной частоты fГ2-fГ3=2fпр и выбраны симметричными относительно несущей частоты f2 основного канала приема f2-fГ3=fГ2-f2=fпр2.
Это обстоятельство приводит к удвоению числа дополнительных каналов приема, но создает благоприятные условия для их подавления за счет корреляционной обработки канальных напряжений.
На выходе смесителей 13 и 24 образуются напряжения комбинационных частот. Усилителями 14 и 25 выделяются напряжения второй промежуточной (разностной) частоты
uпр2(t)=Uпр2cos[2πfпр2t-φk(t)+φпр2],
uпр3(t)=Uпр3cos[2πfпр2t+φk(t)+φпр3], 0≤t≤Tc,
где 
fпр2=fU2-f2=f2-fГ3 - вторая промежуточная (разностная) частота;
φпр2=φг2-φ2,
φпр3=φ2-φГ3.
Напряжения uпр2(t) и uпр3(t) поступают на два входа второго коррелятора 26, на выходе которого формируется напряжение U(τ), пропорциональное корреляционной функции R(τ), которое сравнивается с пороговым напряжением Uпор в пороговом блоке 27. Пороговый уровень Uпор превышается только при максимальном напряжении Umax(τ). Так как канальные напряжения uпр2(t) и uпр3(t) образуются одним и тем же шумоподобным сигналом u2(t), принимаемым по двум каналам на одной и той же частоте f2, то между указанными канальными напряжениями существует сильная корреляционная связь. Кроме того, корреляционная функция R(τ) шумоподобных сигналов имеет ярко выраженный главный лепесток и относительно низкий уровень боковых лепестков. Поэтому на выходе коррелятора 26 формируется максимальное напряжение Umax(τ), которое превышает пороговый уровень Uпор в пороговом блоке 27 [Umax(τ)≥Uпор]. При превышении порогового уровня Uпор в пороговом блоке 27 формируется напряжение, которое поступает на управляющий вход ключа 28 и открывает его. В исходном состоянии ключ 28 всегда закрыт.
При этом ретранслированный сигнал u2(t) (сигнал α2) с выхода первого усилителя 14 второй промежуточной частоты через открытый ключ 28 поступает на вход клиппера 15, где он клиппируется, и записывается в буферное запоминающее устройство 16.
На втором шаге (при передаче сигнала из пункта В) переключатель 4 должен быть разомкнут и сигнал α3 из генератора 3 через клиппер 10 поступает в то же запоминающее устройство 11.
Ретранслированный сигнал α4 записывается, как и сигнал α2, в запоминающее устройство 16. Затем в перерыве между актами измерения пары сигналов α1, α2 и α3, α4 подвергаются корреляционной обработке в измерителе 17 и вычисляются задержки τ2, τ3 и их производные 

Зарегистрированный зондирующий сигнал с выхода блока 11 памяти поступает через блок 18 регулируемой задержки на первый вход перемножителя 19, на второй вход которого подается зарегистрированный ретранслированный сигнал с выхода блока 16 памяти. Полученное на выходе перемножителя 19 напряжение пропускается через фильтр 20 нижних частот, на выходе которого формируется корреляционная функция R(τ). Экстремальный регулятор 21, предназначенный для поддержания максимального значения корреляционной функции R(τ) и подключенный к выходу фильтра 20 нижних частот, воздействует на управляющий вход блока 18 регулируемой задержки и поддерживает вводимую им задержку τ равной τi (i=1, 2, 3, 4), что соответствует максимальному значению корреляционной функции R(τ). Измерение значения τi поступают в микропроцессор 22, где определяются их производные.
В пункте В аппаратура работает аналогично, только порядок шагов там обратный. Для вычисления разности показаний часов Δt по формуле (2) теперь достаточно обменяться между пунктами, полученными цифровыми данными, что можно делать по обычным телефонным или телеграфным каналам связи.
Описанные операции позволяют:
- достичь предельной точности измерений (около ±0,1 нс) с помощью РСДБ техники и техники ретрансляции, которая уже широко используется на практике;
- формировать необходимые для проведения измерений СВЧ-сигналы на наземных пунктах, что дает возможность постепенно наращивать точность измерений за счет оптимизации структуры сигнала и усовершенствования наземной техники регистрации без вмешательства в бортовую аппаратуру ИСЗ;
- повысить оперативность измерений, т.е. довести интервал времени от начала измерений до получения результатов вплоть до нескольких десятков секунд (практически до времени корреляционной обработки сигналов);
- избежать установки на борту ИСЗ высокостабильных хранителей времени и измерителей временных интервалов, ограничить бортовую аппаратуру только системой фазостабильной регистрации СВЧ-сигналов.
Известные технические решения обеспечивают повышение точности измерения относительного временного сдвига между зондирующим и ретранслированным шумоподобными сигналами. Это достигается путем автоматического отслеживания перемещения экстремума корреляционной функции указанных сигналов вдоль оси абсцисс.
С точки зрения техники измерения предлагаемая корреляционная экстремальная система является компенсационной измерительной системой, т.е. в ней измеряемая величина (временной интервал) сравнивается с некоторой эталонной величиной (временной задержкой). Компенсационный метод позволяет осуществлять измерение с очень высокой точностью. Предлагаемая корреляционная измерительная система обеспечивает методическую погрешность измерений, равную долям процента.
Описанная выше работа устройства соответствует случаю приема полезных шумоподобных сигналов по основному каналу на частоте f2 (фиг.4).
Если ложный сигнал (помеха) поступает, например, по первому зеркальному каналу на частоте fз1
uЗ1(t)=UЗ1cos(27πfЗ1t+φЗ1), 0≤t≤ТЗ1,
то усилителями 14 и 25 второй промежуточной частоты выделяются следующие напряжения:
uпр4(t)=Uпр4cos(2πfпр2t+φпр4),
uпр5(t)=Uпр5cos(6πfпр2t+φпр5), 0≤t≤ТЗ1,
где 
Однако, только напряжение Uпр4(t) попадает в полосу пропускания усилителя 14 второй промежуточной частоты. Выходное напряжение коррелятора 26 равно нулю, ключ 28 не открывается и ложный сигнал (помеха), принимаемый по первому зеркальному каналу на частоте fЗ1, подавляется.
По аналогичной причине подавляется и ложный сигнал (помеха), принимаемый по второму зеркальному каналу на частоте fЗ2 и по любому другому дополнительному каналу приема.
Если ложный сигнал (помеха) одновременно принимается по первому и второму зеркальным каналам:
uЗ1(t)=UЗ1cos(2πfЗ1t+φЗ1), 0≤t≤ТЗ1,
uЗ2(t)=UЗ2cos(2πfЗ1t+φЗ2), 0≤t≤ТЗ2,
то усилителями 14 и 25 второй промежуточной частоты выделяются следующие напряжения:
uпр4(t)=Uпp4cos(2πfпр2t+φпр4), 0≤t≤ТЗ1,
uпр6(t)=Uпр6cos(2πfпр2t+φпр6), 0≤t≤ТЗ2,
где 
которые поступают на два входа коррелятора 26. Но ключ 28 в этом случае не открывается. Это объясняется тем, что разные ложные сигналы (помехи) uЗ1(t) и uЗ2(t) принимаются на разных частотах fЗ1 и fЗ2, поэтому между канальными напряжениями uпр4(t) и uпр6(t) существует слабая корреляционная связь. Кроме того, следует отметить, что корреляционная функция помех не имеет ярко выраженного лепестка, как это имеет место у сложных шумоподобных сигналов. Выходное напряжение коррелятора U(τ) в этом случае не превышает порогового уровня Uпор в пороговом блоке 27, ключ 28 не открывается и ложные сигналы (помехи), принимаемые одновременно по двум зеркальным каналам на частотах fЗ1 и fз2, подавляются.
По аналогичной причине подавляются и ложные сигналы (помехи), принимаемые одновременно по двум другим дополнительным каналам.
Таким образом, предлагаемые способ и устройство по сравнению с прототипами обеспечивают повышение помехоустойчивости и точности синхронизации разнесенных на большие расстояния шкал времени. Это достигается подавлением ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам, за счет корреляционной обработки канальных напряжений. При этом частоты fГ2 и fГ3 второго и третьего гетеродинов разнесены на удвоенное значение второй промежуточной частоты
fГ2-fГ3=2fпр2
и выбраны симметричными относительно частоты f2 основного канала приема.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2613865C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 1993 |
|
RU2040035C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2383914C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2426167C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2535653C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ | 2007 |
|
RU2386159C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2612127C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2528405C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2619094C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЧАСОВ | 2000 |
|
RU2177167C2 |
Изобретение относится к технике связи и радиотехники и может быть использовано для сличения шкал времени, разнесенных на большие расстояния. Устройство синхронизации часов, реализующее предлагаемый способ, содержит стандарт 1 частоты и времени, блок 2 гетеродинов, первый 2.1 и второй 2.2 гетеродины, генератор 3 псевдошумового сигнала, переключатель 4, первый 5, второй 13 и третий 24 смесители, усилитель 6 первой промежуточной частоты, первый 7 и второй 12 усилители мощности, дуплексер 8, приемо-передающая антенна 9, первый 14 и второй 25 усилители второй промежуточной частоты, первый 10 и второй 15 клипперы, первое 11 и второе 16 буферное запоминающие устройства, измеритель 17 задержки и их производных, блок 18 регулируемой задержки, перемножитель 19, фильтр 20 нижних частот, экстремальный регулятор 21, микропроцессор 22, третий генератор 23, второй коррелятор 26, пороговый блок 27 и ключ 28. Технический результат заключается в повышении помехоустойчивости и точности синхронизации удаленных шкал времени путем подавления ложных сигналов (помех), принимаемых по зеркальному каналу и комбинационным каналам. 2 н.п. ф-лы, 4 ил.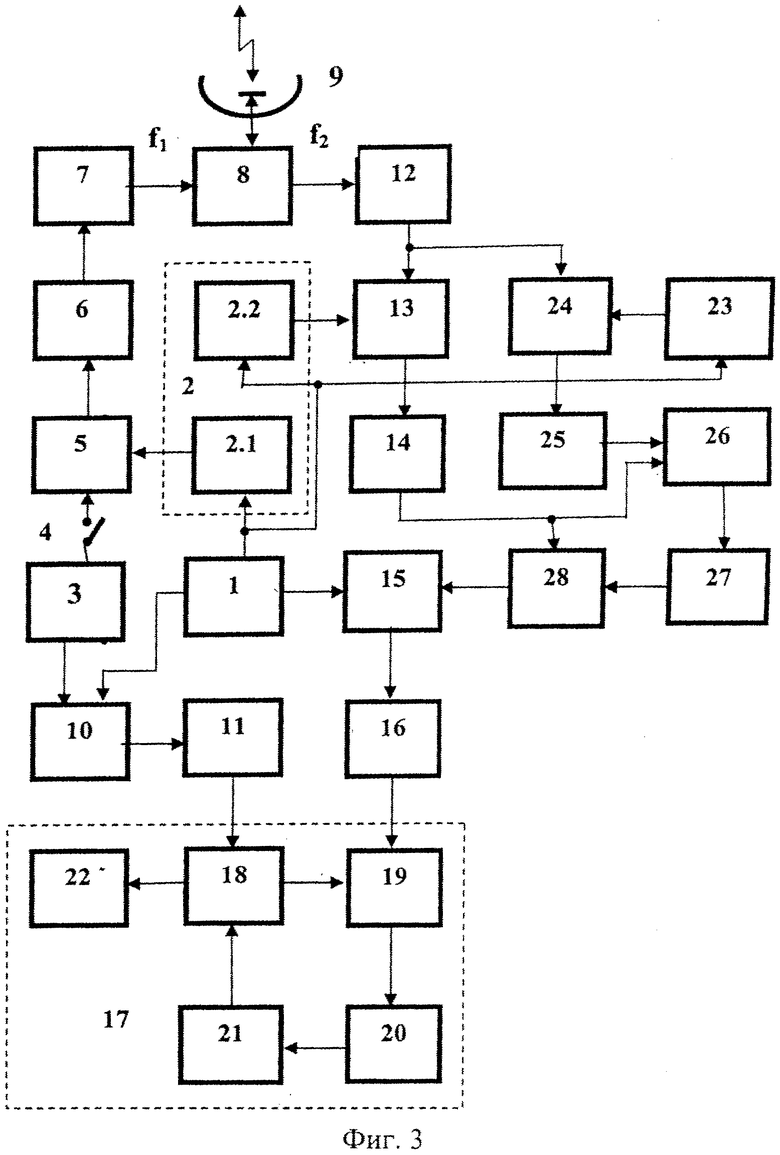
1. Способ синхронизации часов, основанный на одновременном приеме разнесенными наземными пунктами шумоподобных СВЧ-сигналов с борта искусственного спутника Земли, когерентном их преобразовании к видеочастоте, цифровой регистрации принятых сигналов и определении временной задержки прихода одного и того же сигнала в пункты синхронизации методом корреляционной обработки зарегистрированных сигналов, по величине которой производится сличение шкал времени, при этом в начальный момент времени t1 по часам первого пункта с помощью кодовой последовательности формируют шумоподобный СВЧ-сигнал, регистрируют его на этом же пункте, сформированный сигнал преобразуют на частоту f1, усиливают его по мощности, излучают усиленный сигнал в направлении на искусственный спутник Земли - ретранслятор, в тот же момент времени t1 по часам второго пункта с помощью такой же кодовой последовательности формируют такой же шумоподобный СВЧ-сигнал, регистрируют его на втором пункте, принимают бортовой аппаратурой искусственного спутника Земли-ретранслятора сигнала на частоте f1, переизлучают его на первый и второй пункты на частоте f2 с сохранением фазовых соотношений, в произвольный момент времени t3 по часам второго пункта аналогично формируют и регистрируют шумоподобный СВЧ-сигнал, сформированный сигнал преобразуют на частоту f1, усиливают его по мощности, излучают усиленный сигнал в направлении того же искусственного спутника Земли-ретранслятора, в тот же момент времени t3 по часам первого пункта с помощью той же кодовой последовательности формируют такой же шумоподобный СВЧ-сигнал, регистрируют его на первом пункте, принимают бортовой аппаратурой искусственного спутника Земли-ретранслятора сигнал на частоте f1 и переизлучают его на первый и второй пункты на частоте f2 с сохранением фазовых соотношений, зарегистрированный зондирующий сигнал пропускают через блок регулируемой задержки, перемножают его с зарегистрированным ретранслированным сигналом, выделяют низкочастотное напряжение, формируя тем самым корреляционную функцию R(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают корреляционную функцию R(τ) на максимальном уровне, фиксируют временную задержку τi (i=1, 2, 3, 4) между двумя парами зарегистрированных зондирующих и регистрированных сигналов, по величине которой производится сличение шкал времени, отличающийся тем, что принимаемый сигнал на несущей частоте f2 преобразуют по частоте с использованием частот fГ2 и fГ3 второго и третьего гетеродинов, которые разнесены на удвоенное значение второй промежуточной частоты fГ2-fГ3=2fпp2, и выбирают симметричными относительно частоты f2 основного канала приема f2-fг3=fГ2-f2, выделяют напряжения второй промежуточной частоты fпp2=f2-fГ3 и fпр2=fГ2-f2, подвергают их корреляционной обработки, формируют напряжение U(τ), пропорциональное корреляционной функции R(τ), сравнивают его с пороговым напряжением и в случае его превышения формируют напряжение, которое используют для разрешения дальнейшей обработки первого напряжения второй промежуточной частоты.
2. Устройство синхронизации часов, содержащее ИСЗ-ретранслятор, первый и второй наземные пункты, каждый из которых содержат последовательно включенные эталон времени и частоты, первый гетеродин, первый смеситель, второй вход которого через переключатель соединен с первым выходом генератора псевдошумового сигнала, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемо-передающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен через второй гетеродин с первым выходом эталона времени и частоты, и первый усилитель второй промежуточной частоты, второй клиппер, второй вход которого соединен с третьим выходом эталона времени и частоты, второй блок памяти и первый коррелятор, при этом к второму выходу генератора псевдошумового сигнала последовательно подключены первый клиппер, второй вход которого соединен с вторым выходом эталона времени и частоты и первый блок памяти, выход которого подключен к второму входу первого коррелятора, который выполнен в виде последовательно подключенных к выходу первого блока памяти блока регулируемой задержки, перемножителя, второй вход которого соединен с выходом второго блока памяти, фильтра нижних частот и экстремального регулятора, выход которого соединен с вторым входом блока регулируемой задержки, к второму выходу которого подключен микропроцессор, отличающееся тем, что оно снабжено третьим генератором, третьим смесителем, вторым усилителем второй промежуточной частоты, вторым коррелятором, пороговым блоком и ключом, причем к выходу второго усилителя мощности последовательно подключены третий смеситель, второй вход которого соединен с выходом третьего гетеродина, второй усилитель второй промежуточной частоты, второй коррелятор, второй вход которого соединен с выходом первого усилителя второй промежуточной частоты, пороговый блок и ключ, второй вход которого соединен с выходом первого усилителя второй промежуточной частоты, а выход подключен к первому входу второго клиппера, частоты fГ2 и fГ3 второго и третьего гетеродинов разнесены на удвоенное значение второй промежуточной частоты fГ2-fГ3=2fпр2 и выбраны симметрично относительно частоты f2 основного канала приема f2-fГ3=fГ2-f2=fпр2.
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 2007 |
|
RU2350998C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2383914C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 1993 |
|
RU2040035C1 |
| US 2002163466 A1, 07.11.2002 | |||
| US 7426156 B1, 16.09.2008 | |||

