ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение касается устройства для измерения деформаций, в частности, но не исключительно, устройства для измерения деформаций, содержащего средство для быстрого определения направления деформации, измеренной устройством для измерения деформаций.
УРОВЕНЬ ТЕХНИКИ
Во многих областях применения, связанных, например, с трубопроводами, силовыми кабелями или подводными работами, как известно, используются измерительные устройства для непрерывного контроля конструкционных и/или функциональных параметров. Измерительные устройства могут также использоваться в области гражданского строительства, в частности при создании конструкций больших размеров.
Измерительные устройства часто используются для контроля изменений во времени температуры или деформации, т.е. геометрического измерения деформации или удлинения, вызванных напряжениями, а также количественного определения растяжения или сжатия вдоль волокна соответствующей конструкции. Если говорить подробнее, данные измерительные устройства пригодны для выдачи информации локального характера, а потому могут быть использованы для контроля температуры или деформации как функции времени, связанных с множеством участков и/или компонентов инженерной конструкции, которую требуется контролировать, предоставляя полезную информацию об утечках, перемещениях грунта, деформациях и т.п., относящихся к конструкции.
Среди измерительных устройств, используемых для контроля статуса инженерных или строительных конструкций, оптоэлектронные устройства, основанные на использовании оптических волокон, являются весьма важными. В частности, эти устройства, как правило, содержат электронное измерительное устройство, оборудованное волоконно-оптическим зондом, обычно порядка несколько десятков километров. На практике это оптическое волокно стационарно соединено и по существу поддерживается в контакте с участками или компонентами инженерных конструкций, физические параметры которых должны контролироваться. Например, это оптическое волокно может проходить вдоль труб нефтепровода или может быть погружено в бетонную опору здания, так чтобы использоваться для отображения локальных тенденций изменения температуры или деформации этих конструкций. Другими словами, эти оптоэлектронные устройства содержат волоконно-оптические датчики, т.е. датчики, в которых в качестве чувствительного элемента используется оптическое волокно.
Волоконно-оптические датчики могут представлять собой:
- точечные датчики, в которых только одна точка вдоль оптического волокна выполнена чувствительной к температуре и/или деформации;
- квазираспределенные датчики или мультиплексированные датчики, в которых множество точечных датчиков соединены друг с другом оптическим волокном и мультиплексированы вдоль длины волокна; или
- распределенные или полностью распределенные датчики, в которых оптическое волокно представляет собой длинный непрерывный линейный датчик.
Данные измерительные инструменты, построенные на оптических волокнах, могут подразделяться на различные типы в зависимости как от физической величины/физических величин, которые они способны измерять, так и от физических принципов, используемых для определения этой физической величины/этих физических величин.
Когда мощный световой импульс с длиной волны λ0 (или частотой ν0=c/λ0, где c - скорость света), известный как импульс накачки, распространяется через оптическое волокно, малое количество мощности падающего света рассеивается во всех направлениях вследствие локальных неоднородностей в оптическом волокне. Если оптическое волокно представляет собой одномодовое волокно (SMF), т.е. волокно, выполненное с возможностью переноса только одного светового луча (одной моды), тогда имеет значение рассеяние только в прямом и обратном направлениях, поскольку рассеянный свет в других направлениях не проводится. Особый интерес представляет обратное рассеяние, поскольку оно распространяется обратно к тому концу волокна, на котором лазерный свет изначально был запущен в оптическое волокно.
Процессы рассеяния возникают на примесях материала (рэлеевское рассеяние), термически возбужденных молекулярных колебаниях: акустических фононах (бриллюэновское рассеяние) и оптических фононах (рамановское рассеяние).
Технологии измерения с помощью распределенных датчиков основаны на анализе обратнорассеянного сигнала, создаваемого в различных точках вдоль волокна.
Рэлеевское рассеяние - это взаимодействие светового импульса с примесями материала. Оно является наиболее мощным из трех обратнорассеянных сигналов в кварцевых волокнах и имеет ту же длину волны, что и падающий свет. Рэлеевское рассеяние - физический принцип, лежащий в основе работы оптического рефлектометра, работающего во временной области (OTDR).
Бриллюэновское рассеяние - это взаимодействие светового импульса с термически возбужденными акустическими волнами (которые также называют акустическими фононами). Акустические волны, вызывая изменение плотности среды, в незначительной степени, локально и с определенной периодичностью модулируют показатель преломления. Соответствующая перемещающаяся решетка отражает малое количество падающего света и сдвигает его частоту (или изменяет длину волны) вследствие эффекта Доплера. Эта величина сдвига зависит от скорости звука в волокне, а ее знак - от направления распространения перемещающихся акустических волн. Таким образом, бриллюэновское рассеяние создается на двух различных частотах относительно частоты падающего света, называемых стоксовой и антистоксовой компонентами. В кварцевых волокнах бриллюэновский сдвиг частоты лежит в диапазоне 11 ГГц (0,1 нм в диапазоне длин волн 1550 нм) и зависит от температуры и деформации.
Рамановское рассеяние - это взаимодействие светового импульса с термически возбужденными атомными или молекулярными колебаниями (оптическими фононами) и по интенсивности является наименьшим из трех обратнорассеянных сигналов. В кварцевых волокнах рамановское рассеяние вызывает большой сдвиг частоты, обычно на 13 ТГц, что соответствует сдвигу длины волны на 100 нм при длине волны 1500 нм. Мощность антистоксовой компоненты рамановского рассеяния зависит от температуры, в то время как стоксовая компонента практически не зависит от температуры.
На Фиг. 4 схематично показан спектр обратнорассеянного света, генерируемого в каждой точке вдоль оптического волокна, когда лазерный свет запущен в оптическое волокно. Наивысший пик на длине волны λ0, соответствующей длине волны одномодового лазера, - это рэлеевский пик, обусловленный примесями материала. Так называемые стоксовые компоненты и так называемые антистоксовые компоненты представляют собой пики соответственно справа и слева от рэлеевского пика. Антистоксовый рамановский пик, обусловленный оптическим фононом, имеет амплитуду, зависящую от температуры T. Стоксовый и антистоксовый бриллюэновские пики, генерируемые термически возбужденными акустическими волнами, имеют частоту, зависящую от температуры T и деформации ε.
Бриллюэновский сдвиг (изменение длины волны относительно начального лазерного света) представляет собой внутренне присущее физическое свойство материала волокна и предоставляет важную информацию о распределении деформации и температуры в оптическом волокне.
Данные по частоте бриллюэновского обратнорассеянного света можно использовать для измерения локальной температуры или деформации вдоль оптического волокна. В качестве чувствительных элементов могут быть использованы стандартные или специальные одномодовые телекоммуникационные волокна и кабели. Технологию измерения локальной температуры и деформации называют частотной технологией, поскольку информация о температуре или деформации содержится в бриллюэновском частотном сдвиге. Она, по сути, более надежна и более стабильна, чем любые технологии, основанные на измерении интенсивности, например рамановский эффект, которые чувствительны к дрейфам, потерям и изменениям затухания. Как следствие, технология на основе бриллюэновского обратного рассеяния обеспечивает долгосрочную стабильность и нечувствительность к затуханиям. Данный способ распространения светового импульса в оптическое волокно и измерения обратнорассеянного сигнала называют спонтанным бриллюэновским рассеянием (SPBS), сам же рассеянный свет является низкоинтенсивным.
Процесс бриллюэновского рассеяния обладает той особенностью, что его можно стимулировать вторым оптическим сигналом, называемым сигналом зондирования, в дополнение к первому оптическому сигналу, называемому сигналом накачки, генерирующему рассеяние, при условии, что сигнал зондирования удовлетворяет определенным условиям согласования по фазе. Это свойство представляет особый интерес в измерительных целях и может достигаться путем использования сигнала зондирования, распространяющегося относительно сигнала накачки. Стимулирование достигает максимума, когда частоты (или длины волн) сигналов накачки и зондирования отделены ровно на величину бриллюэновского частотного сдвига. В этом случае энергия, передаваемая от сигнала накачки к сигналу зондирования (или наоборот, в зависимости от выбранного стоксового/антистоксового обратнорассеянного сигнала), приводит к значительному усилению интенсивности обратного рассеяния, а значит, к увеличению отношения сигнал/шум (SNR). Это рассматривается как явление резонанса, при котором усиление мощности сигнала зондирования происходит за счет сигнала накачки при выполнении условия резонанса, т.е. когда разность частот между сигналом накачки и сигналом зондирования согласуется с локальной бриллюэновской частотой.
В известных решениях сигнал накачки образован оптическими импульсами продолжительностью в одну или более наносекунд, а сигнал зондирования - светом с незатухающей волной (SW), как будет рассмотрено ниже.
Оптоэлектронные измерительные устройства на основе стимулированного бриллюэновского обратного рассеяния (SBS) известны как бриллюэновский оптический анализатор во временной области или BOTDA, в противоположность бриллюэновским оптическим рефлектометрам во временной области (BOTDR), построенным на основе спонтанного бриллюэновского обратного рассеяния (SPBS).
Оптоэлектронное измерительное устройство на основе BOTDA обычно выполняет анализ в частотной области и анализ во временной области.
Анализ в частотной области: информация о температуре/деформации закодирована в бриллюэновском частотном сдвиге. Сканирование частоты сигнала зондирования относительно сигнала накачки при контроле интенсивности обратнорассеянного сигнала позволяет определить пик бриллюэновского усиления, а значит, соответствующий бриллюэновский сдвиг, из которого можно рассчитать температуру или деформацию. Это достигается путем использования двух источников оптического излучения, например лазеров, или одного источника оптического излучения, порождающего как сигнал накачки, так и сигнала зондирования. В данном случае используют электрооптический модулятор (обычно телекоммуникационную составляющую) для сканирования частоты сигнала зондирования управляемым способом.
Анализ во временной области: благодаря импульсной природе сигнала накачки происходит взаимодействие сигнала накачки/сигнала зондирования в различных точках вдоль волокна в различное время. Для каждой заданной точки часть сигнала зондирования, провзаимодействовавшего с сигналом накачки, поступает на детектор с задержкой по времени, равной удвоенному времени прохождения от входа в волокно до конкретной точки.
Таким образом, контроль интенсивности обратного рассеяния во времени при известной скорости света в волокне позволяет получить данные о местоположении, в котором произошло рассеяние.
Обычные коммерческие оптоэлектронные измерительные устройства на основе BOTDA могут измерять температуру/деформацию на 30-километровом отрезке волокна с пространственным разрешением 1 м (эквивалентно 30000 отдельных независимых датчиков). Разрешение по температуре обычно составляет <1 K и обычно 20 µε для деформации.
В дополнение к распределенному измерению на основе волоконной оптики информация о деформации может измеряться от точки к точке с использованием, например, волоконной брэгговской решетки (FBG) или механического датчика деформации.
Два или более оптических волокон могут быть выполнены с возможностью взаимодействия с различными частями конструкции, например два или более оптических волокон могут быть выполнены с возможностью прохождения вдоль длины трубопровода, при этом каждое расположено в своей точке по окружности трубопровода, например в положении «12 часов» и в положении «3 часа» соответственно. Проведя распределенные измерения с использованием каждого из оптических волокон, можно определить величину и местоположение деформации по длине трубопровода, а именно в вертикальной плоскости трубопровода, т.е. в положении «12 часов», и горизонтальной плоскости трубопровода, т.е. в положении «3 часа». Измерение направления деформации представляет особый интерес для скважин (нефтяных скважин или геотермальных скважин) или любой шахты (например, в горнорудной промышленности). В этих случаях соответствующая информация должна касаться бокового смещения (сдвиговых деформаций) в силу перемещения грунта на различных глубинах. Оно также представляет интерес для других конструкций, таких как подводные стояки, кабели-тросы или даже линии для переноса текучих сред и трубопроводы, для которых контролируется усталостное состояние.
Однако возникают проблемы, когда конструкция, в отношении которой осуществляется контроль, скручивается, например 10-километровый подводный трубопровод может легко скручиваться в процессе установки. Скручивание трубопровода приведет к тому, что оптические волокна более не будут располагаться в положении «12 часов» и положении «3 часа» соответственно. Таким образом, по причине скручивания трубопровода деформация, указанная оптическим волокном, которое первоначально располагалось в положении «12 часов» на окружности трубопровода, не должна рассматриваться как деформация, созданная в вертикальной плоскости трубопровода. Точно так же, в силу скручивания трубопровода, деформация, указанная оптическим волокном, которое первоначально располагалось в положении «3 часа» на окружности трубопровода, не должна рассматриваться как деформация, созданная в горизонтальной плоскости трубопровода. Следовательно, существующие устройства для измерения деформации не способны точно детектировать направление деформации, создаваемой в конструкции. В результате также невозможно точно определить направление изгиба конструкции, используя существующие устройства для измерения деформации.
В US2006/013523 раскрыты устройство позиционирования и определения формы волокна, а также способ его использования. Устройство содержит волоконно-оптическое средство. Волоконно-оптическое средство содержит по меньшей мере два одиночных сердцевинных оптических волокна или многожильное оптическое волокно, имеющее по меньшей мере две волоконные сердцевины. В любом случае волоконные сердцевины разнесены друг от друга, так что взаимодействие мод между волоконными сердцевинами сведено к минимуму. В каждой волоконной сердцевине расположен массив волоконных брэгговских решеток. С каждой волоконной брэгговской решеткой функционально связан широкополосный опорный отражатель, при этом для каждого соотношения отражатель/решетка установлена длина оптического пути. С волоконно-оптическим средством функционально связан рефлектометр в частотной области. При эксплуатации устройство закреплено на объекте. Измеряется деформация на оптическом волокне и устанавливается взаимозависимость между результатами измерения деформации и результатами измерения локального изгиба. Результаты измерения локального изгиба интегрируются для определения положения или формы объекта.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению предложено устройство для измерения деформаций, содержащее
два или более датчиков деформации, каждый из которых способен измерять деформацию и каждый из которых выполнен так, что он может быть приспособлен для взаимодействия с удлиненной трубчатой конструкцией, которую требуется контролировать, вдоль длины удлиненной трубчатой конструкции, так что деформация в конструкции может детектироваться датчиком деформации, а также
одну или более точек отсчета положения, расположенных вдоль длины удлиненной трубчатой конструкции в заданных положениях относительно двух или более датчиков деформации, при этом одна или более точек отсчета положения выполнены так, что они подходят для взаимодействия с измерительным средством;
одно или более измерительных средств, выполненных с возможностью взаимодействия с одной или более точками отсчета положения, так что может быть определена угловая ориентация одной или более точек отсчета положения относительно опорного положения.
Устройство для измерения деформаций, например, может быть встроено в трубопровод, такой как подводный трубопровод. Например, три датчика деформации могут быть выполнены с возможностью равномерного распределения по окружности подводного трубопровода (например, под углом 0° к опорному положению (т.е. в положении «12 часов»), 120° к опорному положению (в положении «4 часа»), а также 240° к опорному положению (в положении «8 часов») соответственно) при одной точке отсчета положения, при этом каждый может быть выполнен с возможностью прохождения вдоль длины подводного трубопровода, позволяя измерить деформацию по длине подводного трубопровода. Три датчика деформации и одна точка отсчета положения могут быть выполнены так, чтобы образовывать единое целое с подводным трубопроводом. На больших отрезках длины подводного трубопровода, например 10 км, по меньшей мере один участок подводного трубопровода может оказаться скрученным на неизвестный угол. Поскольку три датчика деформации выполнены заодно с подводным трубопроводом, датчики деформации совершат поворот вместе с подводным трубопроводом, так что они более не будут находиться соответственно в положениях «12 часов», «4 часа» и «8 часов», следовательно, деформация, распознанная датчиком деформации, не будет точно отражать положение на окружности трубопровода, в котором присутствует деформация, т.е. направление деформации, созданной в подводном трубопроводе. Например, если датчик деформации, изначально расположенный в положении «12 часов» (0°), обнаружил, что деформация присутствует на скрученном участке подводного трубопровода, из-за скручивания трубопровода распознанная деформация не обязательно будет создана в верхней точке (т.е. в положении «12 часов») окружности подводного трубопровода. В настоящем изобретении проблема решается путем использования измерительного средства для определения угловой ориентации опорного положения на скрученном участке трубопровода; поскольку опорное положение находится в зафиксированном известном угловом положении относительно трех датчиков деформации, угловая ориентация трех датчиков деформации может быть определена из измеренной угловой ориентации опорного положения. Зная угловую ориентацию трех датчиков деформации, можно точно определить направление, в котором создается деформация в подводном трубопроводе. Например, если измерительное средство показывает, что точка отсчета положения переместилась на 180° вследствие скручивания подводного трубопровода, можно заключить, что датчик деформации, который изначально располагался в положении «12 часов», также переместился на 180°; а значит, можно сделать вывод, что деформация, распознанная датчиком деформации, который изначально располагался в положении «12 часов», на скрученном участке трубопровода представляет собой деформацию, созданную в нижней точке подводного трубопровода, т.е. в положении «6 часов» на окружности трубопровода. Таким образом, настоящее изобретение позволяет точно определить направление деформации в конструкциях.
Настоящее изобретение позволяет определить скручивание, вызванное монтажными работами, так что можно определить положение датчика/датчиков деформации. Соответственно можно определить деформацию изгиба, а также направление изгиба.
Деформация - геометрическая мера изменения формы, представляющая относительное перемещение между частицами в материальном теле, т.е. мера того, насколько данное перемещение локально отличается от перемещения абсолютно твердого тела.
Датчик деформации может быть выполнен с возможностью взаимодействия с трубчатой конструкцией. В настоящем описании термин «труба» или «трубчатый» подразумевает любую удлиненную конструкцию, он включает в себя, не ограничиваясь перечисленным, удлиненные цилиндрические конструкции, имеющие полую центральную часть, такие как стояки, трубы, линии для переноса текучих сред и трубопроводы, а также включает в себя удлиненные цилиндрические конструкции, которые могут не иметь полой центральной части, такие как фалы и кабели, например электрические кабели и силовые кабели.
Два или более датчиков деформации могут быть выполнены в удлиненной форме. Два или более датчиков деформации могут быть выполнены с возможностью взаимодействия с трубчатой конструкцией, вдоль длины трубчатой конструкции, так что может быть измерено направление деформации вдоль длины трубчатой конструкции. Каждый датчик деформации может содержать центральную ось, при этом каждый датчик деформации может продолжаться вдоль своей соответствующей оси, так что каждый датчик деформации имеет удлиненную форму.
Одна или более точек отсчета положения могут быть выполнены в удлиненной форме. Одна или более точек отсчета положения могут быть выполнены с возможностью взаимодействия с трубчатой конструкцией, вдоль длины трубчатой конструкции. Каждая точка отсчета положения может содержать центральную ось, при этом каждая точка отсчета положения может продолжаться вдоль центральной оси, так что каждая точка отсчета положения имеет удлиненную форму.
Трубчатая конструкция может содержать продольную ось, при этом два или более датчиков деформации и одна или более точек отсчета положения могут быть выполнены с возможностью прохождения параллельно продольной оси трубчатой конструкции. Одна или более точек отсчета положения могут быть выполнены с возможностью прохождения по спирали вдоль трубчатой конструкции. Два или более датчиков деформации могут быть выполнены с возможностью прохождения по спирали вдоль трубчатой конструкции и/или прохождения параллельно продольной оси трубчатой конструкции.
Два или более датчиков деформации могут содержать по меньшей мере одно оптическое волокно. Два или более датчиков деформации могут содержать множество оптических волокон.
По меньшей мере одно оптическое волокно каждого из двух или более датчиков деформации может быть выполнено с возможностью взаимодействия с конструкцией, которая должна контролироваться в отношении деформации, так что деформация в конструкции привносит деформацию в оптическое волокно. По меньшей мере одно оптическое волокно каждого из двух или более датчиков деформации может быть выполнено с возможностью встраивания в конструкцию, которая должна контролироваться в отношении деформации. По меньшей мере одно оптическое волокно каждого из двух или более датчиков деформации может располагаться симметрично вдоль периферии трубчатого звена, которое требуется контролировать.
Оптическое волокно каждого из двух или более датчиков может располагаться симметрично вокруг периферии трубчатого звена, которое требуется контролировать в отношении деформации.
Два или более датчиков деформации могут содержать средство для выполнения распределенного оптоволоконного анализа. Средство для выполнения распределенного оптоволоконного анализа может представлять собой устройство опроса, которое может проводить анализ бриллюэновского рассеяния. Два или более датчиков деформации могут содержать по меньшей мере одно оптическое волокно, выполненное с возможностью взаимодействия с конструкцией, которую требуется контролировать, при этом каждое оптическое волокно выполнено с возможностью оптической связи с блоком опроса, выполненным с возможностью выполнения распределенного оптоволоконного анализа для детектирования деформации в оптическом волокне.
Распределенный оптоволоконный анализ может содержать анализ бриллюэновского рассеяния. Распределенный оптоволоконный анализ может содержать когерентное рэлеевское рассеяние. Анализ бриллюэновского рассеяния может содержать анализ спонтанного бриллюэновского рассеяния, который основан на детектировании и анализе обратнорассеянного сигнала, обусловленного модулированным сигналом накачки. Анализ бриллюэновского рассеяния может содержать анализ стимулированного бриллюэновского рассеяния, который основан на детектировании и анализе обратнорассеянной световой волны, являющейся продуктом взаимодействия сигнала накачки и сигнала зондирования.
Средство для проведения распределенного оптоволоконного анализа может содержать блок опроса. Блок опроса может содержать бриллюэновский оптический рефлектометр, работающий во временной области, оптический рефлектометр, работающий в частотной области (BOFDR), бриллюэновский оптический корреляционный рефлектометр (BOCDR), бриллюэновский оптический анализатор во временной области, и/или средство для проведения оптического анализа бриллюэновского рассеяния в частотной области (BOFDA), и/или средство для проведения оптического корреляционного анализа бриллюэновского рассеяния (BOCDA).
Для реализации спонтанного бриллюэновского рассеяния бриллюэновский оптический рефлектометр, работающий во временной области, может генерировать оптический сигнал накачки, посылаемый вдоль оптического волокна датчика деформации. По мере того как сигнала накачки распространяется вдоль оптического волокна, часть сигнала накачки претерпевает обратное рассеяние, благодаря термически возбужденным акустическим фононами в оптическом волокне, чтобы создать обратнорассеянный сигнал. Деформация, индуцированная в оптическом волокне, влияет на оптические свойства оптического волокна, тем самым вызывая, по меньшей мере, некоторое локальное изменение характеристик обратнорассеянного сигнала. Обратнорассеянный сигнал детектируется; детектирование локального изменения оптических характеристик обратнорассеянного света указывает на наличие деформации вдоль оптического волокна. Следует отметить, что оптическое волокно крепится к конструкции, например подводному трубопроводу, которую требуется контролировать в отношении деформации; деформация, присутствующая в конструкции, индуцирует деформацию в оптическом волокне. Анализируя время пробега части обратнорассеянного света, оптические характеристики которого локально изменены, можно определить точное местонахождения деформации вдоль оптического волокна, а значит, и ее точное местонахождения вдоль конструкции.
Для реализации стимулированного бриллюэновского рассеяния используется, например, бриллюэновский оптический анализатор во временной области для генерирования оптического сигнала накачки, посылаемого в первом направлении через первый конец оптического волокна каждого датчика деформации. Бриллюэновский оптический анализатор во временной области также генерирует сигнал зондирования, который посылается во втором направлении, через второй, противоположный, конец оптического волокна каждого датчика деформации. Сигнал зондирования способствует генерации обратнорассеянного сигнала, так что обратнорассеянный сигнал легче детектировать. Деформация в некоторой точке вдоль оптического волокна изменяет оптические свойства оптического волокна в этой точке; изменение оптических свойств оптического волокна локально изменяет взаимодействие сигнала накачки и сигнала зондирования в оптическом волокне. Изменение взаимодействия сигнала накачки и сигнала зондирования приводит, по меньшей мере, к некоторому локальному изменению характеристик обратнорассеянного сигнала. Обратнорассеянный сигнал детектируется; детектирование локального изменения оптических характеристик обратнорассеянного света указывает на наличие деформации вдоль оптического волокна. Следует отметить, что оптическое волокно крепится к конструкции, например трубопроводу, которую требуется контролировать в отношении деформации; деформация, присутствующая в конструкции, индуцирует деформацию в оптическом волокне. Анализируя время пробега части обратнорассеянного света, оптические характеристики которого локально изменены, можно определить точное местонахождение деформации вдоль оптического волокна, а значит, и ее точное местонахождение вдоль конструкции.
Одна или более точек отсчета положения могут быть выполнены с возможностью взаимодействия с конструкцией, которую требуется контролировать. Одна или более точек отсчета положения могут быть интегрированы с конструкцией, которую требуется контролировать в отношении деформации.
Датчик деформации может содержать множество точек отсчета положения.
Одна или более точек отсчета положения могут содержать опорную маркировку, выполненную так, что ее можно видеть на изображении, выдаваемом камерой. Опорная маркировка, по меньшей мере, может представлять собой цветную полосу, цветную маркировку, канавку, канал или выступ. Цветная полоса или цветная маркировка может иметь цвет, отличный от цвета поверхности конструкции, с которой она взаимодействует. Одна или более точек отсчета положения могут содержать дорожку, вдоль которой может перемещаться измерительное средство. Дорожка может определяться одним или несколькими из следующих элементов: одной или несколькими канавками; одним или несколькими выступами; одним или несколькими рельсами; одним или несколькими магнитами, выполненными с возможностью обеспечения магнитной направляющей; либо маркировкой, которой может отслеживаться измерительным средством, например оптической маркировкой, выполненной с возможностью обеспечения оптической направляющей. Одна или несколько канавок могут иметь любое пригодное сечение; например, одна или несколько канавок может иметь сечение V-образной формы, квадратной формы, прямоугольной формы и/или криволинейной формы. Один или несколько выступов могут иметь сечение V-образной формы, квадратной формы, прямоугольной формы и/или криволинейной формы.
Одна или более точек отсчета положения могут располагаться на внутренней поверхности конструкции, которую требуется контролировать в отношении деформации. Например, одна или более точек отсчета положения могут располагаться на внутренней поверхности подводного трубопровода. Одна или более точек отсчета положения могут располагаться на наружной поверхности конструкции, которую требуется контролировать в отношении деформации. Одна или более точек отсчета положения могут быть выполнены заодно и/или встроены в конструкцию, которую требуется контролировать в отношении деформации.
Устройство для измерения деформаций может содержать множество измерительных средств.
Измерительное средство может содержать средство для взаимодействия с дорожкой, определяющей точку отсчета положения, так что измерительное средство может перемещаться вдоль дорожки. Средство для взаимодействия с дорожкой может представлять собой рельс, способный принимать участок дорожки.
Измерительное средство может содержать камеру.
Измерительное средство может содержать средство для измерения угловой ориентации. Средство для измерения угловой ориентации может представлять собой по меньшей мере одно из средств, выбираемых из группы, содержащей: гироскоп, акселерометр, GPS или внутреннюю платформу любого типа, используемую в навигационных целях. Например, три акселерометра могут быть размещены на трех различных направлениях на подвижном средстве, которое механически взаимодействует с одной или более точками отсчета положения, чтобы перемещаться вдоль одной или более точек отсчета положения. Три акселерометра расположены на подвижном средстве для измерения ускорения подвижного средства вдоль трех различных осей. По мере того как подвижное средство перемещается вдоль одной или более точек отсчета положения, акселерометры измеряют ускорение подвижного средства вдоль трех различных осей; используя эти данные об ускорении, предоставленные акселерометром, можно определить траекторию перемещения подвижного средства, а значит, определить угловую ориентацию подвижного средства по мере его перемещения вдоль одной или более точек отсчета положения. Поскольку подвижное средство взаимодействует для перемещения вдоль одной или более точек отсчета положения, угловая ориентация подвижного средства соответствует угловой ориентации одной или более точек отсчета положения. Предпочтительно средство для измерения угловой ориентации содержит гироскоп. Средство для измерения угловой ориентации предпочтительно выполнено с возможностью измерения углового отклонения для точки отсчета положения как функции расстояния вдоль точки отсчета положения.
Измерительное средство может содержать моторное средство, выполненное с возможностью перемещения, средство для измерения угловой ориентации вдоль дорожки, определяющей точку отсчета положения. Моторное средство может быть выполнено с возможностью дистанционного управления. Измерительное средство может содержать подвижное средство, которое может нести средство для измерения угловой ориентации. Подвижное средство может быть выполнено с возможностью перемещения вдоль дорожки, определяющей точку отсчета положения. Подвижное средство может быть выполнено с возможностью дистанционного управления. Средство для измерения угловой ориентации может быть выполнено с возможностью измерения угловой ориентации подвижного средства по мере того, как оно перемещается вдоль дорожки, определяющей точку отсчета положения. Угловая ориентация точки отсчета положения может определяться из измеренной угловой ориентации подвижного средства. Моторное средство и/или подвижное средство могут быть выполнены с возможностью использования под водой и/или на земле. Термин «подвижное средство» включает в себя подвижный сборочный узел или подвижный носитель. Подвижное средство может нести измерительное средство, например гироскоп, и может механически соединяться с одной или более точек отсчета положения, так что подвижное средство может перемещаться вдоль одной или более точек отсчета положения. По мере того как подвижное средство перемещается вдоль одной или более точек отсчета положения, гироскоп замеряет угловую ориентацию подвижного средства по мере его перемещения вдоль одной или более точек отсчета положения; угловая ориентация подвижного средства соответствует угловой ориентации одной или более точек отсчета положения.
Средство для измерения угловой ориентации может представлять собой любое средство для измерения углового перемещения одной или более точек отсчета положения, будь то механически, магнитным способом или оптически. При механическом соединении измерительное средство отслеживает точку отсчета положения и совершает поворот по мере совершения поворота точки отсчета положения; этот поворот замеряется измерительным средством, при этом угол поворота используется для определения углового положения датчиков. Например, механически соединенное измерительное средство может содержать подвижное средство, содержащее закрепленный на нем гироскоп, при этом одна или более точек отсчета положения определяют дорожку, с которой может механически взаимодействовать подвижное средство и вдоль которой оно может перемещаться. Для системы с магнитным или оптическим соединением измерительное средство совершает поворот с использованием исполнительных механизмов, так что опорная точка всегда находится в одинаковом положении относительно измерительного средства. Таким образом, измерительное средство изменяет свою угловую ориентацию для отслеживания точки отсчета положения. Поворот измерительного средства замеряется.
Измерительное средство может дополнительно содержать средство для хранения результатов измерений угловой ориентации, полученных средством для измерения угловой ориентации. Измерительное средство может дополнительно содержать ЗУ, которое хранит результаты измерений угловой ориентации, полученные средством для измерения угловой ориентации, по длине конструкции, которая контролируется в отношении деформации. Измерительное средство может дополнительно содержать систему передачи информации для направления данных об угловом положении оператору для интерактивной обработки сигналов. Измерительное средство может дополнительно содержать средство для передачи результатов измерений угловой ориентации, полученных средством для измерения угловой ориентации.
Измерительное средство может содержать средство для измерения углового перемещения, а также средство для перемещения средства для измерения углового перемещения. Средство для перемещения средства для измерения углового перемещения может представлять собой моторное средство, выполненное с возможностью перемещения средства для измерения углового перемещения, так что средство для измерения углового перемещения может следовать вдоль длины точки отсчета положения. Например, измерительное средство может содержать камеру, содержащую зафиксированный на ней гироскоп, так что можно определить угловую ориентацию камеры, а также моторное средство, которое может перемещать камеру линейно вдоль длины точки отсчета положения. Средство для перемещения камеры вдоль длины точки отсчета положения может быть оснащено, например, опорой (poll), на которой крепится камера, или моторным средством, взаимодействующим с камерой. Камера обеспечивает изображения для пользователя; при этом пользователь может манипулировать камерой, используя моторное средство или опору, так что точка отсчета положения остается видимой на изображениях, выдаваемых камерой. Например, в областях, в которых точка отсчета положения смещена, моторное средство или опора могут быть использованы для управления камерой так, что точка отсчета положения остается видимой на изображениях, выдаваемых камерой. Гироскоп может регистрировать ориентационное положение камеры по мере ее перемещения для отслеживания перемещенной точки отсчета положения. Таким же образом один или более магнитных элементов могут определять одну или более точек отсчета положения. Измерительное средство может содержать магнитный датчик, способный измерять магнитное поле, создаваемое магнитными элементами; гироскоп может быть закреплен на магнитном датчике, так что угловая ориентация магнитного датчика может быть измерена. Магнитный датчик может перемещаться для отслеживания магнитного поля, создаваемого магнитными элементами, определяющими одну или более точек отсчета положения; по мере перемещения магнитного датчика его угловая ориентация замеряется гироскопом.
Два или более датчиков деформации могут содержать оптическое волокно. Два или более датчиков деформации могут содержать волоконную брэгговскую решетку (FBG) и/или тензометр.
Объединенные данные по замеренной деформации позволяют рассчитать радиус и ориентацию изгиба и реконструировать трехмерную ориентацию изгиба. В данной области техники хорошо известно, как вычисляются радиус и ориентация изгиба. Например, радиус и ориентация изгиба могут быть получены путем измерения бриллюэновского сдвига частоты обратнорассеянных сигналов, распространяющихся в трех конкретных волоконных датчиках. Датчики закреплены вдоль конструкции в положениях «12 часов», «4 часа» и «8 часов». В сечении конструкции, где происходит изгиб, каждый датчик испытает действие различимого эффекта деформирования в разных количествах и с разными знаками: положительный знак - для растяжения волокна, отрицательный знак - для сжатия волокна. Далее искомые параметры (радиус и ориентация изгиба) могут определяться из тригонометрических соотношений между тремя различимыми величинами деформации, замеренными тремя датчиками деформации. Измеренная угловая ориентация точки отсчета положения вдоль длины точки отсчета положения предоставляет информацию в отношении степени скручивания конструкции, с которой взаимодействует точка отсчета положения. Измеренная деформация может использоваться для вычисления направления изгиба вдоль конструкции. Измеренная деформация может использоваться для вычисления направления изгиба и радиуса изгиба конструкции. При вычислении направления изгиба и радиуса изгиба может использоваться математическая модель конструкции.
Согласно дополнительному аспекту настоящего изобретения предложено устройство для измерения деформаций, содержащее
два или более датчиков деформации, каждый из которых способен измерять деформацию и каждый из которых выполнен так, что он может быть приспособлен для взаимодействия с конструкцией, которую требуется контролировать, так что деформация конструкции может определяться датчиком деформации, а также
одну или более точек отсчета положения, расположенных в заданных положениях относительно двух или более датчиков деформации, при этом одна или более точек отсчета положения выполнены так, что они пригодны для взаимодействия с измерительным средством, так что измерительное средство может определять угловую ориентацию одной или более точек отсчета положения.
Согласно дополнительному аспекту настоящего изобретения предложен сборочный узел, при этом сборочный узел содержит конструкцию, которую требуется контролировать в отношении деформации, а также устройство для измерения деформаций согласно любому из вышеупомянутых устройств для измерения деформаций.
Согласно дополнительному аспекту настоящего изобретения предложен способ измерения деформации в конструкции, содержащий этапы:
создания устройство для измерения деформаций согласно любому из вышеупомянутых датчиков деформации;
детектирования деформации в конструкции и определения местоположения в конструкции, в котором присутствует распознанная деформация, используя два или более датчиков деформации;
измерения угловой ориентации одной или более точек отсчета в том местоположении в конструкции, в котором присутствует деформация, используя измерительное средство;
определения угловой ориентации двух или более датчиков деформации из измеренной угловой ориентации одной или более точек отсчета;
определения направления, в котором создается деформация в конструкции, из найденной угловой ориентации двух или более датчиков деформации.
Этапы детектирования деформации в конструкции и определения местоположения в конструкции, в котором присутствует распознанная деформация, могут содержать этап выполнения распределенного оптоволоконного анализа обратнорассеянного сигнала, распространенного в оптическом волокне датчика деформации.
Способ может дополнительно содержать этапы расчета ориентации изгиба и/или радиуса изгиба конструкции. Как говорилось ранее, способы осуществления этих этапов хорошо известны в данной области техники.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет легче понять, изучив описание варианта осуществления, представленного лишь в качестве примера и проиллюстрированного на фигурах, где
на Фиг. 1 показан вид в перспективе устройства для измерения деформаций согласно одному варианту осуществления настоящего изобретения, встроенного в трубчатую конструкцию;
на Фиг. 2 показан вид в разрезе устройства для измерения деформаций согласно дополнительному варианту осуществления настоящего изобретения;
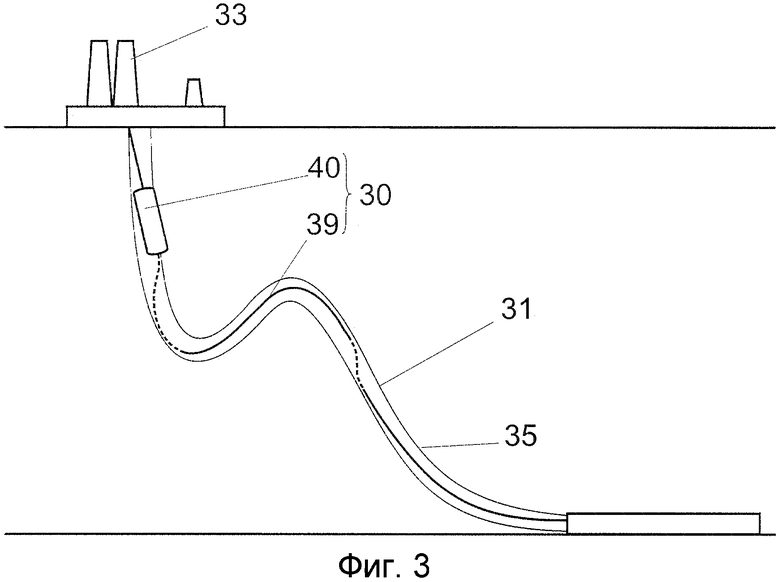
на Фиг. 3 показан вид в перспективе дополнительного варианта осуществления устройства для измерения деформаций по настоящему изобретению, используемого на подводном кабеле-тросе;
на Фиг. 4 схематично показан спектр обратнорассеянного света, сгенерированного в каждой точке вдоль оптического волокна, когда лазерный свет запущен в оптическое волокно.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 показан вид в перспективе устройства 1 для измерения деформаций согласно одному варианту осуществления настоящего изобретения, встроенного в трубчатую конструкцию 3. В примере варианта осуществления, показанном на Фиг. 1, трубчатая конструкция 3 представляет собой трубу, предназначенную для подводных работ, например для подводной нефтедобычи. Трубчатая конструкция 3 содержит продольную ось 'A', при этом трубчатая конструкция продолжается вдоль продольной оси 'A', так что трубчатая конструкция имеет длину 'L'.
Устройство 1 для измерения деформаций содержит три датчика 5a-c деформации, каждый из которых способен измерять деформацию. Три датчика 5a-c деформации выполнены заодно с трубчатой конструкцией 3 и равномерно распределены по окружности 7 трубчатой конструкции 3; датчик 5a деформации расположен в положениях «12 часов» (0°), датчик 5b деформации расположен в положениях «4 часа» (120°), а датчик 5c деформации расположен в положениях «8 часов» (240°). Каждый из датчиков 5a-c деформации содержит центральную ось 'a', при этом каждый из датчиков 5a-c деформации продолжается вдоль этой центральной оси 'a', так что каждый из датчиков 5a-c деформации имеет удлиненную форму. Каждый из датчиков 5a-c деформации продолжается параллельно продольной оси 'A' трубчатой конструкции 3 по всей длине 'L' трубчатой конструкции 3. Следует понимать, что датчики 5a-c деформации по альтернативному варианту могут располагаться по спирали вдоль длины трубчатой конструкции 3.
Сенсорное устройство 1 дополнительно содержит точку отсчета положения в виде канавки 9, которая также выполнена заодно с трубчатой конструкцией 3. Канавка 9 расположена в заданном местоположении относительно трех датчиков 5a-c деформации; в данном конкретном примере канавка 9 расположена в положении «9 часов» на окружности 7 трубчатой конструкции 3. Канавка 9 также содержит центральную ось 'g', так что канавка 9 имеет удлиненную форму. Канавка 9 также продолжается параллельно продольной оси 'A' трубчатой конструкции 3 по всей длине 'L' трубчатой конструкции 3.
Для взаимодействия с канавкой 9 может быть использовано любое пригодное измерительное средство, так что угловая ориентация канавки 9 может определяться в любой продольной точке вдоль конструкции. Например, камера 13, к которой присоединен гироскоп 15, может перемещаться вдоль внутренней стороны 11 трубчатой конструкции 3, чтобы взаимодействовать с канавкой 9, обеспечивая изображения канавки 9. Камера 13 может быть выполнена с возможностью предоставления изображений в реальном масштабе времени пользователю, который контролирует угловую ориентацию камеры. Камера содержит моторное средство 17, которое может управляться дистанционно; моторное средство 17 позволяет камере маневрировать. Следует понимать, что камера не обязательно должна иметь моторное средство 17; камера может крепиться к концу опоры и совершать маневры под управлением пользователя, использующего опору. Камера 13 перемещается вдоль внутренней стороны трубчатой конструкции 3, при этом ориентационное положение камеры 13 изменяется пользователем так, что канавка 9 всегда остается видимой на изображениях, обеспечиваемых камерой 13. Таким образом, если угловое положение канавки 9 изменилось вследствие скручивания трубчатой конструкции 3, то, поскольку камера 13 перемещается пользователем для отслеживания канавки 9, гироскоп 15 зарегистрирует угловое перемещение камеры 13 в процессе ее перемещения по отслеживанию канавки 9. Угловое перемещение камеры 13, таким образом, будет соответствовать угловому перемещению канавки 9; а значит, угловое перемещение, зарегистрированное гироскопом 15, будет соответствовать угловому перемещению канавки 9, вызванному скручиванием трубчатой конструкции 3. Гироскоп 15 регистрирует угловое перемещение камеры 13 по мере ее перемещения по отслеживанию канавки 9 по всей длине 'L' трубчатой конструкции 3; соответственно в каждой точке вдоль трубчатой конструкции 3 угловое положение канавки 9 может быть определено.
Поскольку канавка 9 имеет известную фиксированную позицию относительно трех датчиков 5a-c деформации, угловая ориентация каждого из трех датчиков 5a-c деформации в каждой точке по длине 'L' трубчатой конструкции 3 может быть определена из найденной угловой ориентации канавки 9. Если, например, датчик 5a деформации детектирует, что в определенной точке вдоль длины 'L' трубчатой конструкции 3 имеется деформация, угловую ориентацию датчика 5a деформации в этой конкретной точке можно определить на основе угловой ориентации канавки 9 в этой конкретной точке трубчатой конструкции (измеренной гироскопом на камере). Угловая ориентация датчика 5a деформации указывает направление деформации в трубчатой конструкции 3 в этой точке. Например, если датчик 5a деформации определяет присутствие деформация в конкретной точке на расстоянии 50 метров вдоль длины 'L' трубчатой конструкции 3, а угловая ориентация датчика 5a деформации при этом в данной конкретной точке на расстоянии 50 м вдоль длины 'L' трубчатой конструкции 3 по результатам измерения составляет 90° (т.е. в положении «3 часа» на окружности 7 трубчатой конструкции 3), тогда можно определить, что деформация, присутствующая в конкретной точке на расстоянии 50 м вдоль длины 'L' трубчатой конструкции 3, создана в положении «3 часа» на окружности 7 трубчатой конструкции 3, т.е. деформация образована перпендикулярно трубчатой конструкции 3.
Следует понимать, что точка отсчета положения не ограничивается канавкой 9. Точка отсчета положения может принимать любую пригодную форму. Например, точка отсчета положения может представлять собой дорожку. Дорожка может определяться любым пригодным средством, например канавка или выступ могут определять дорожку. Дорожка может быть выполнена с возможностью взаимодействия с измерительным средством, которое может замерять угловую ориентацию по мере своего перемещения вдоль дорожки. Следует понимать, что измерительное средство не ограничивается камерой с гироскопом. Измерительное средство может представлять собой, например, подвижное средство, содержащее гироскоп. Подвижное средство может быть выполнено так, что оно может перемещаться вдоль точки отсчета положения в виде дорожки. Например, подвижное средство может содержать рельс или колеса, которые могут взаимодействовать с дорожкой. По мере того как подвижное средство перемещается вдоль дорожки, гироскоп измеряет угловую ориентацию подвижного средства. Измеренная угловая ориентация подвижного средства будет соответствовать угловой ориентации дорожки, т.е. точке отсчета положения. Угловая ориентация датчиков деформации в свою очередь может определяться из угловой ориентации дорожки, т.е. точки отсчета положения.
На Фиг. 2 показан вид в разрезе устройства 20 для измерения деформаций согласно дополнительному варианту осуществления настоящего изобретения. Устройство 20 для измерения деформаций имеет множество тех же признаков, что и устройство 1 для измерения деформаций, показанное на Фиг. 1, при этом схожие элементы имеют одинаковые ссылочные позиции. Как и сенсорное устройство 1, показанное на Фиг. 1, устройство 20 для измерения деформаций, изображенное на Фиг. 2, выполнено заодно с трубчатой конструкцией 3.
Устройство 20 для измерения деформаций, показанное на Фиг. 2, отличается от устройства 1 для измерения деформаций, показанного на Фиг. 1, тем, что точка отсчета положения принимает вид удлиненного выступа 19, продолжающегося по длине трубчатой конструкции 3. Выступ 19 жестко закреплен на внутренней поверхности 21 трубчатой конструкции 3. Выступ 19 расположен в заданном угловом положении относительно трех датчиков 5a-c деформации. Выступ 19 также содержит ось 'g', при этом выступ 19 продолжается вдоль этой центральной оси 'g', так что выступ 19 имеет удлиненную форму. Выступ 19 также продолжается параллельно продольной оси 'A' трубчатой конструкции 3 по всей длине 'L' трубчатой конструкции 3.
Выступ 19 определяет дорожку, вдоль которой может перемещаться измерительное средство. Например, выступ 19 может определять дорожку, вдоль которой может перемещаться подвижное средство, содержащее гироскоп; по мере того как подвижное средство перемещается вдоль дорожки, гироскоп измеряет угловую ориентацию подвижного средства. Измеренная угловая ориентация подвижного средства будет соответствовать угловой ориентации дорожки; поскольку выступ 19 (т.е. дорожка) находится в известном фиксированном положении относительно датчиков 5a-c деформации, угловая ориентация каждого из датчиков 5a-c деформации в каждой точке по длине 'L' трубчатой конструкции 3 может быть рассчитана из результатов измерения угловой ориентации, полученных гироскопом подвижного средства в данной точке. Таким образом, можно определить направление деформации по длине трубчатой конструкции 3.
На Фиг. 3 показан вид в перспективе устройства 30 для измерения деформаций согласно дополнительному варианту осуществления устройства. Устройство 30 для измерения деформаций имеет множество тех же признаков, что и устройство 1 для измерения деформаций, показанное на Фиг. 1, и устройство 20 для измерения деформаций, показанное на Фиг. 2, при этом схожие элементы имеют одинаковые ссылочные позиции.
В конкретном примере варианта осуществления, показанного на Фиг. 3, устройство 30 для измерения деформаций встроено в подводный кабель-трос 31, продолжающийся от морского основания 33. Как и устройства 1 и 20 для измерения деформаций, показанные соответственно на Фиг. 1 и 2, устройство 30 для измерения деформаций содержит три датчика деформации (не показаны), выполненные заодно с кабелем-тросом и расположенные так, что они равномерно распределены по окружности подводного кабеля-троса 31. Как и в устройствах 1 и 20 для измерения деформаций, показанных соответственно на Фиг. 1 и 2, каждый из датчиков деформации имеет удлиненную форму и каждый продолжается параллельно продольной оси подводного кабеля-троса 31 по всей длине подводного кабеля-троса 31.
Устройство 30 для измерения деформаций, показанное на Фиг. 3, отличается от устройств 1 и 20 для измерения деформаций, соответственно показанных на Фиг. 1 и 2, тем, что точка отсчета положения принимает вид дорожки 39, расположенной на наружной поверхности 35 подводного кабеля-троса 31. Дорожка 39 расположена в заданном угловом положении относительно трех датчиков деформации, выполненных заодно с подводным кабелем-тросом 31.
Дорожка 39 выполнена с возможностью приема измерительного средства в виде подвижного средства 40, содержащего гироскоп (не показан) или иного пригодного средства для измерения угловой ориентации подвижного средства 40. Подвижное средство 40 выполнено с возможностью перемещения вдоль дорожки 39. Подвижное средство 40 выполнено так, что его перемещением вдоль дорожки 39 можно управлять дистанционно; таким образом, пользователь может управлять перемещением подвижного средства 40 вдоль дорожки 39 с морского основания 33, используя соответствующее средство управления. По мере перемещения подвижного средства 40 вдоль дорожки 39 гироскоп (не показан) регистрирует угловую ориентацию подвижного средства 40. Измеренная угловая ориентация подвижного средства 40 будет соответствовать угловой ориентации дорожки 39. Поскольку дорожка 39 находится в известном фиксированном угловом положении относительно датчиков деформации, угловая ориентация каждого из датчиков деформации в каждой точке по длине подводного кабеля-троса 31 может быть рассчитана из результатов измерения угловой ориентации, полученных гироскопом. Таким образом, можно определить направление деформации, созданной в подводном кабеле-тросе 31 в каждой точке по длине подводного кабеля-троса 31.
Специалистам в данной области техники станут очевидны различные модификации и изменения описанных вариантов осуществления изобретения без отхода от объема изобретения, определяемого прилагаемой формулой изобретения. Хотя изобретение описано в связи с конкретными предпочтительными вариантами осуществления, следует понимать, что заявленное изобретение не ограничивается подобными конкретными вариантами осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК И СПОСОБ ИЗМЕРЕНИЯ | 2011 |
|
RU2573614C2 |
| СПОСОБ И УСТРОЙСТВО БРИЛЛЮЭНОВСКОГО ОПТОЭЛЕКТРОННОГО ИЗМЕРЕНИЯ | 2010 |
|
RU2562927C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ ГРУНТА | 2011 |
|
RU2485448C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ КАБЕЛЬ ДЛЯ ИЗМЕРЕНИЯ РАСПРЕДЕЛЕНИЙ ДАВЛЕНИЯ, ТЕМПЕРАТУРЫ И ДЕФОРМАЦИИ | 2016 |
|
RU2700043C1 |
| БРИЛЛЮЭНОВСКИЙ РЕФЛЕКТОМЕТР | 2010 |
|
RU2444001C1 |
| УСТРОЙСТВО И СПОСОБ ОПТИЧЕСКОЙ ИМПУЛЬСНОЙ РЕФЛЕКТОМЕТРИИ | 2003 |
|
RU2325762C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАСПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ ДЕФОРМАЦИЙ ПО ДЛИНЕ ОПТИЧЕСКОГО ВОЛОКНА | 2016 |
|
RU2626078C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ТЕМПЕРАТУРЫ И ДЕФОРМАЦИИ | 2003 |
|
RU2248540C1 |
| Бриллюэновский рефлектометр | 2021 |
|
RU2755773C1 |
| СИСТЕМА НА ОСНОВЕ ВЫНУЖДЕННОГО РАССЕЯНИЯ МАНДЕЛЬШТАМА-БРИЛЛЮЭНА С МНОЖЕСТВОМ ВБР | 2010 |
|
RU2511066C2 |


Изобретение относится к устройствам измерения деформации. Устройство для измерения деформаций содержит два или более датчиков деформации, каждый из которых способен измерять деформацию и каждый из которых выполнен так, что он может быть приспособлен для взаимодействия с конструкцией, которую требуется контролировать, так что деформация конструкции может детектироваться датчиком деформации, одну или более точек отсчета положения, расположенных в заданном положении относительно двух или более датчиков деформации. Одна или более точек отсчета положения выполнены так, что они подходят для взаимодействия с измерительным средством. Одно или более измерительных средств, выполнены с возможностью взаимодействия с одной или более точками отсчета положения, так что может быть определена угловая ориентация одной или более точек отсчета положения. Способ измерения деформации в конструкции заключается в детектировании информации, измерении угловой ориентации, определении угловой ориентации. Техническим результатом изобретения является повышение точности измерения деформации. 2 н. и 13 з.п. ф-лы, 4 ил.
1. Устройство для измерения деформаций, содержащее
два или более датчиков деформации, каждый из которых способен измерять деформацию и каждый из которых выполнен так, что он может быть приспособлен для взаимодействия с удлиненной трубчатой конструкцией, которую требуется контролировать, вдоль длины удлиненной трубчатой конструкции, так что деформация в удлиненной трубчатой конструкции может детектироваться датчиком деформации,
одну или более точек отсчета положения, расположенных вдоль длины удлиненной трубчатой конструкции в заданном положении относительно двух или более датчиков деформации, при этом одна или более точек отсчета положения выполнены так, что они подходят для взаимодействия с измерительным средством;
одно или более измерительных средств, содержащих средство для измерения угловой ориентации, при этом одно или более измерительных средств выполнены с возможностью взаимодействия с одной или более точками отсчета положения, так что может быть определена угловая ориентация одной или более точек отсчета положения.
2. Устройство для измерения деформаций по п.1, в котором каждый из двух или более датчиков деформации содержит по меньшей мере одно оптическое волокно, выполненное с возможностью взаимодействия с конструкцией, которую требуется контролировать, при этом каждое оптическое волокно выполнено с возможностью осуществления оптической связи со средством для выполнения распределенного оптоволоконного анализа с целью детектирования деформации в оптическом волокне.
3. Устройство для измерения деформаций по п.2, в котором по меньшей мере одно оптическое волокно каждого из двух или более датчиков деформации выполнены так, что оно составляет единое целое с конструкцией, которую требуется контролировать.
4. Устройство для измерения деформаций по любому из пп.1-3, в котором одна или более точек отсчета положения содержат дорожку, выполненную так, что вдоль нее может перемещаться подвижное средство.
5. Устройство для измерения деформаций по любому из пп.1-3, в котором одна или более точек отсчета положения содержат маркировку, выполненную так, что ее можно видеть на изображении, выдаваемом камерой.
6. Устройство для измерения деформаций по любому из пп.1-3, в котором одна или более точек отсчета положения содержат один или более магнитных элементов, которые могут взаимодействовать со средством измерения магнитного поля.
7. Устройство для измерения деформаций по п.1, в котором измерительное средство содержит подвижное средство, при этом подвижное средство выполнено так, что оно может перемещаться вдоль дорожки, определяющей точку отсчета положения, при этом средство измерения угловой ориентации выполнено с возможностью взаимодействия с подвижным средством, так что угловая ориентация подвижного средства может быть измерена по мере его перемещения вдоль дорожки.
8. Устройство для измерения деформаций по п.1, в котором измерительное средство содержит камеру, выполненную с возможностью обеспечения изображения точки отсчета положения, а также средство для перемещения камеры, так что камера может перемещаться для отслеживания точки отсчета положения, при этом средство измерения угловой ориентации выполнено с возможностью взаимодействия с камерой, так что угловая ориентация камеры может быть измерена по мере перемещения камеры для отслеживания точки отсчета положения.
9. Устройство для измерения деформаций по п.1, в котором измерительное средство содержит средство измерения магнитного поля, выполненное с возможностью детектирования магнитного поля одного или более магнитных элементов, определяющих точку отсчета положения, а также средство для перемещения средства измерения магнитного поля, так что средство измерения магнитного поля может перемещаться в положение, в котором присутствует магнитное поле одного или более магнитных элементов; при этом средство измерения угловой ориентации выполнено с возможностью взаимодействия со средством измерения магнитного поля, так что угловая ориентация средства измерения магнитного поля может измеряться по мере перемещения средства измерения магнитного поля для отслеживания магнитного поля одного или более магнитных элементов.
10. Устройство для измерения деформаций по п.1, в котором измерительное средство дополнительно содержит средство для хранения результатов измерения угловой ориентации, полученных средством измерения угловой ориентации.
11. Устройство для измерения деформаций по п.7, в котором средство измерения угловой ориентации содержит гироскоп.
12. Устройство для измерения деформаций по п.1, в котором каждая точка отсчета положения выполнена с возможностью продолжаться вдоль длины конструкции, которую требуется контролировать.
13. Способ измерения деформации в конструкции, содержащий этапы:
предоставления устройства для измерения деформаций по п.1;
детектирования деформации в конструкции и определения местоположения в конструкции, в котором присутствует детектированная деформация, используя два или более датчиков деформации;
измерения угловой ориентации одной или более точек отсчета положения в том местоположении в конструкции, в котором присутствует деформация, используя измерительное средство;
определения угловой ориентации двух или более датчиков деформации из измеренной угловой ориентации одной или более точек отсчета;
определения направления, в котором создается деформация в конструкции, из определенной угловой ориентации двух или более датчиков деформации.
14. Способ по п.13, в котором этапы детектирования деформации в конструкции и определения местоположения в конструкции, в котором присутствует детектированная деформация, содержат этап выполнения распределенного оптоволоконного анализа в отношении обратнорассеянного сигнала, распространенного в оптическом волокне датчика деформации.
15. Способ по п.13 или 14, дополнительно содержащий этапы расчета ориентации изгиба и/или радиуса изгиба конструкции.
| WO 2010028387 А2, 11.03.2010 | |||
| US 2006013523 А1, 19.01.2006 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДЕФОРМАЦИИ И СПОСОБЫ ЕГО ИСПОЛЬЗОВАНИЯ В МЕХАНИЧЕСКИХ СТРУКТУРАХ, ПОДВЕРГАЮЩИХСЯ НАПРЯЖЕНИЮ | 1991 |
|
RU2110044C1 |
| RU 57893 U1, 27.10.2006 | |||

