Перекрестная ссылка на родственную заявку
По данной заявке испрашивается приоритет заявки «Оптическая система для офтальмологического хирургического лазера» под серийным номером: 12/511988, поданной 29 июля 2009 г, которая полностью включена в настоящее описание путем ссылки.
Область, к которой относится изобретение
Данное изобретение относится к системе для хирургического вмешательства на переднем сегменте глаза с использованием фемтосекундного лазера, конкретнее, к вариантам осуществления, сводящим к минимуму оптические искажения лазерного луча, во время сканирования и фокусирования лазерного луча в глаз.
Предпосылки изобретения
В данной заявке описываются примеры и варианты осуществления технологий и систем для лазерной хирургии на переднем сегменте глаза для доступа к хрусталику посредством фотодеструкции, вызванной лазерными импульсами. В различных хирургических процедурах на хрусталике для его удаления используются разнообразные технологии для разрушения хрусталика на мелкие фрагменты, которые могут быть удалены из глаза через маленькие разрезы. В данных процедурах используются ручные инструменты, ультразвук, нагретые жидкости или лазеры и имеют тенденцию характеризоваться существенными недостатками, включая необходимость введения в глаз зондов для осуществления фрагментации, и ограниченную точность, связанную с такими методиками фрагментации хрусталика.
Фотодекструктивная лазерная технология может обеспечивать подачу лазерных импульсов в хрусталик для оптической фрагментации хрусталика без введения зонда и, таким образом, может обеспечить возможность усовершенствованного удаления хрусталика. Вызванная лазером фотодеструкция широко использовалась в лазерной офтальмологической хирургии, и Nd:YAG лазеры часто использовались в качестве источников лазерного излучения, включая применение для фрагментации хрусталика через вызванную лазером фотодеструкцию. В некоторых существующих системах используются наносекундные лазеры с энергией импульсов в несколько МДж (E. H. Ryan et al. Americal Journal of Ophthalmology 104: 382-386, October 1987; R. R. Kruger et al. Ophthalmology 108: 2122-2129, 2001), и пикосекундные лазеры с несколькими десятками мкДж (A. Gwon et al. J. Cataract Refract Surg. 21, 282-286, 1995). Эти относительно длительные импульсы выдают относительно большие количества энергии в участки хирургического вмешательства, что приводит к значительным ограничениям точности и управления процедурой, в то же время, создавая относительно высокий уровень риска нежелательных исходов.
Параллельно, в родственной области хирургии роговицы, было признано, что более короткая длительность импульсов и лучшая фокусировка могут быть достигнуты путем использования импульсов длительностью в сотни фемтосекунд вместо наносекундных и пикосекундных импульсов. Фемтосекундные импульсы выдают гораздо меньше энергии на импульс, значительно увеличивая точность и безопасность процедуры.
В настоящее время, несколько компаний разрабатывают фемтосекундную лазерную технологию на коммерческой основе для офтальмологических процедур на роговице, таких как лоскутная пластика по методу LASIK и роговичные трансплантаты. Эти компании включают Intralase Corp./Advanced Medical Optics, США, 20/10 Perfect Vision Optische Gerate GmbH, Германия, Carl Zeiss Meditec, Inc., Германия, и Ziemer Ophthalmic Systems AG, Швейцария.
Однако указанные системы сконструированы в соответствии с требованиями хирургии роговицы. Решающее значение имеет то, что диапазон глубины фокуса лазерного луча обычно составляет менее чем примерно 1 мм, толщины роговицы. В сущности, данные конструкции не обеспечивают решения существенных проблем выполнения хирургических вмешательств на хрусталике глаза.
Краткое изложение сущности изобретения
Вкратце и обобщенно, офтальмологическая лазерная система включает источник лазерного излучения для генерирования импульсного лазерного луча, XY-сканер для приема импульсного лазерного луча и для испускания сканирующего по направлениям XY луча, производящего сканирование по двум направлениям, по существу поперечным оптической оси, и многофункциональный Z-сканер для приема сканирующего по направлениям XY луча и для испускания сканирующего по направлениям XYZ луча, причем Z-сканер имеет числовую апертуру NA и фокальное пятно в целевой области и для модификации числовой апертуры NA, по существу независимо от сканирования фокальной глубины Z фокального пятна по оптической оси.
В некоторых исполнениях Z-сканер включает первый блок расширителя луча, подвижный блок расширителя луча и вторичный оптический контроллер.
В некоторых исполнениях, испускаемый сканирующий по направлениям XYZ луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации, при этом общая аберрация имеет оптимум как функцию числовой апертуры NA при оптимальной числовой апертуры NA opt (z) для фокальной глубины Z, и Z-сканер может настраиваться для модификации числовой апертуры NA до оптимальной числовой апертуры NA opt (z) при фокальной глубине Z.
В некоторых исполнениях, оптимальная общая аберрация соответствует критерию оптимальной аберрации, где критерий оптимальной аберрации представляет собой минимум одного из радиуса r f фокального пятна, ошибки ω RMS волнового фронта и коэффициента α 40 сферической аберрации или максимум числа Штреля S.
В некоторых исполнениях, критерий оптимальной аберрации соответствует одной из пяти контрольных точек P1=(0,0), P2=(2,6), P3=(5,0), P4=(8,0), P5=(8,3) в местоположениях (z, r):, все в миллиметрах, под любым углом азимута, где z обозначает расстояние по оптической оси и r обозначает соответствующую радиальную цилиндрическую координату, и (0,0) системы цилиндрических координат обозначает переднюю и центральную точку целевой области.
В некоторых исполнениях, испускаемый сканирующий по направлениям XYZ луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации, и числовая апертура NA является настраиваемой для снижения на фокальной глубине Z общей аберрации лазерной системы, по меньшей мере, на процентную долю P(MovableExpander) относительно общей аберрации аналогичной лазерной системы, имеющей Z-сканер с не настраиваемой числовой апертурой NA, где процентная доля P(MovableExpander) составляет одну из величин 20%, 30%, 40% и 50%.
В некоторых исполнениях, общая аберрация характеризуется критерием аберрации, причем критерий аберрации представляет собой один из радиуса r f фокального пятна, ошибки ω RMS волнового фронта и коэффициента α 40 сферической аберрации.
В некоторых исполнениях, критерий аберрации, соответствующий одной из пяти контрольных точек Р1=(0,0), P2=(2,6), P3=(5,0), P4=(8,0), P5=(8,3), в местоположениях (z, r), все в миллиметрах, под любым углом азимута, где z обозначает расстояние по оптической оси и r обозначает соответствующую радиальную цилиндрическую координату, и (0,0) системы цилиндрических координат обозначает переднюю и центральную точку целевой области.
В некоторых исполнениях, испускаемый сканирующий по направлениям XYZ луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации, и числовая апертура NA может настраиваться для увеличения на фокальной глубине Z числа Штреля S, соответствующего общей аберрации лазерной системы, по меньшей мере, на процентную долю P(MovableExpander) выше, чем число Штреля S лазерной системы, где Z-сканер не имеет настраиваемой числовой апертуры NA, где процентная доля P(MovableExpander) составляет одну из величин 20%, 30%, 40% и 50%.
В некоторых исполнениях, испускаемый сканирующий по направлениям XYZ луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации, и числовая апертура NA может настраиваться для увеличения на фокальной глубине Z числа Штреля S, соответствующего общей аберрации до величины 0,8, где число Штреля S аналогичной лазерной системы, отличающейся только наличием Z-сканера без настраиваемой числовой апертуры, составляет менее 0,8.
В некоторых исполнениях, число Штреля S, соответствует одной из пяти контрольных точек Р1=(0,0), P2=(2,6), P3=(5,0), P4=(8,0), P5=(8,3), в местоположениях (z, r), все в миллиметрах, под любым углом азимута, где z обозначает расстояние по оптической оси и r обозначает соответствующую радиальную цилиндрическую координату, и (0,0) системы цилиндрических координат обозначает переднюю и центральную точку целевой области.
В некоторых исполнениях Z-сканер сконфигурирован для сканирования фокальной глубины Z лазерной системы в пределах диапазона сканирования по направлению Z, где диапазон сканирования по направлению Z составляет один из: от 5 миллиметров до 10 миллиметров и от 0 миллиметров до 15 миллиметров.
В некоторых исполнениях, испускаемый сканирующий по направлениям XYZ луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации, причем общая аберрация имеет последовательность оптимальных величин общей аберрации при последовательности оптимальных числовых апертур NA opt (z), соответствующих последовательности фокальных глубин Z, где Z-сканер может настраиваться для модификации числовой апертуры NA с ее доведением до последовательности оптимальных числовых апертур NA opt (z) при последовательности фокальных глубин Z.
В некоторых исполнениях, аберрация характеризуется критерием аберрации, причем критерий аберрации представляет собой один из радиуса r f фокального пятна, числа Штреля S, ошибки ω RMS волнового фронта и коэффициента α 40 сферической аберрации, соответствующих последовательности фокальных глубин Z.
В некоторых исполнениях, радиальная координата фокального пятна вдоль последовательности фокальных глубин Z составляет менее чем 3 мм.
В некоторых исполнениях, испускаемый сканирующий по направлениям XYZ луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации, где числовая апертура NA может доводиться до последовательности числовых апертур NA(z) при последовательности фокальных глубин Z для уменьшения репрезентативной общей аберрации, по меньшей мере, на процентную долю P(scan) относительно аналогичной лазерной системы, где Z-сканер не имеет настраиваемую числовую апертуру NA.
В некоторых исполнениях, репрезентативная общая аберрация представляет собой одну из средней, минимальной или максимальной общей аберрации по диапазону сканирования по направлению Z.
В некоторых исполнениях, общая аберрация характеризуется одним из критериев радиуса r f фокального пятна, числа Штреля S, ошибки ω RMS волнового фронта и коэффициента α 40 сферической аберрации, соответствующих последовательности фокальных глубин Z.
В некоторых исполнениях, процентная доля P(scan) составляет одну из величин 20%, 30%, 40% и 50%.
В некоторых исполнениях, числовая апертура NA может доводиться от первой величины, когда выполняется роговичная процедура, до второй величины, когда выполняется процедура на хрусталике. В некоторых исполнениях, первая величина находится в диапазоне 0,2-0,5, а вторая величина находится в диапазоне 0,1-0,3. В некоторых исполнениях, первая величина находится в диапазоне 0,25-0,35, а вторая величина находится в диапазоне 0,15-0,25.
В некоторых исполнениях, первый блок расширителя луча представляет собой один из фиксированного блока и подвижного блока.
В некоторых исполнениях, лазерная система для выполнения хирургического вмешательства по поводу катаракты включает источник лазерного излучения для генерирования импульсного лазерного луча, XY-сканер для сканирования импульсным лучом по направлениям XY, по существу поперечным оптической оси, и Z-сканер для сканирования по направлению Z фокального пятна луча, сканирующего по направлениям XY, в целевой области по оптической оси Z, и для доведения числовой апертуры NA с целью отслеживания оптимальной числовой апертуры NA opt (z) по мере сканирования фокального пятна по направлению Z.
В некоторых исполнениях, луч, сканирующий по направлению Z, имеет общую аберрацию, причем общая аберрация имеет оптимум как функцию числовой апертуры NA при оптимальной числовой апертуре NA opt (z) для последовательности фокальных глубин Z, и Z-сканер может настраиваться для модификации числовой апертуры NA для отслеживания оптимальной числовой апертуры NA opt (z) по мере сканирования фокального пятна по последовательности фокальных глубин Z.
В некоторых исполнениях, сканирующий по направлению Z луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации.
В некоторых исполнениях, числовая апертура NA, отслеживающая оптимальную числовую апертуру NA opt (z), включает числовую апертуру NA, являющуюся по существу равной NA opt (z), и числовую апертуру NA, находящуюся в пределах близости к процентной доле P(track) NA opt (z), где P(track) составляет одну из величин 10%, 20% и 30%.
В некоторых исполнениях Z-сканер включает интегрированный контроллер сконфигурированный для сканирования фокального пятна по последовательности фокальных глубин Z, и для регулирования числовой апертуры NA для отслеживания оптимальной числовой апертуры NA opt (z), соответствующей последовательности фокальных глубин Z коррелируемым образом.
В некоторых исполнениях, интегрированный контроллер сконфигурирован для сканирования фокального пятна и для регулирования числовой апертуры NA в ходе одного действия регулирования.
В некоторых исполнениях, интегрированный контроллер включает один из регулятора расстояния между первым блоком расширителя луча и блоком подвижного расширителя луча и регулятора положения линзы контроллера.
В некоторых исполнениях, интегрированный контроллер включает два регулятора, сконфигурированных для настройки двух параметров Z-сканера коррелированным образом.
В некоторых исполнениях Z-сканер сконфигурирован для сканирования фокального пятна в целевой области в пределах диапазона сканирования по направлению Z, простирающегося от 0 мм до 10 мм, и для регулирования числовой апертуры NA в пределах одного из диапазонов от 0,40 до 0,10 и от 0,35 до 0,15 во время сканирования фокального пятна.
В некоторых исполнениях Z-сканер сконфигурирован для сканирования фокального пятна и для регулирования числовой апертуры NA в комбинации со XY-сканером.
В некоторых исполнениях Z-сканер сконфигурирован для сканирования фокального пятна и для регулирования числовой апертуры NA в комбинации со вспомогательным Z-сканером, расположенным между источником лазерного излучения и XY-сканером.
В некоторых исполнениях, офтальмологическая лазерная система включает источник лазерного излучения для генерирования импульсного лазерного луча, XY-сканер для приема импульсного лазерного луча, и для испускания сканирующего по направлениям XY луча, сканирующего по двум направлениям, по существу поперечным оптической оси, и многофункциональный Z-сканер для приема сканирующего по направлениям XY луча с целью испускания сканирующего по направлениям XYZ луча, сканирующего дополнительно по направлению Z по оптической оси, и для уменьшения числовой апертуры NA в целевой области роговицы в диапазоне от 0,25 до 0,35, когда фокальная глубина Z лазерной системы является репрезентативной для роговичной процедуры, в целевой области хрусталика в диапазоне от 0,15 до 0,25, когда фокальная глубина Z лазерной системы является репрезентативной для процедуры на хрусталике.
В некоторых исполнениях Z-сканер имеет два регулируемых контрольных параметра, первый контрольный параметр, связанный с расстоянием между первым блоком расширителя луча и блоком подвижного расширителя луча, и второй контрольный параметр, связанный с положением подвижной линзы Z-сканера.
Краткое описание чертежей
Фиг. 1 иллюстрирует хирургическую систему подачи лазерного луча 1.
Фиг. 2 иллюстрирует гауссов волновой фронт G и аберрационный волновой фронт W.
Фиг. 3A-B иллюстрируют лучи в оптимальной и сканированной фокальной плоскости.
Фиг. 3C иллюстрирует определение радиус фокального пятна.
Фиг. 4 иллюстрирует связь между числом Штреля S и ошибкой RMS волнового фронта ω.
Фиг. 5 иллюстрирует контрольные точки для офтальмологической хирургии.
Фиг. 6A-B концептуально иллюстрируют работу прекомпенсатора 200.
Фиг. 7A-B иллюстрируют различные виды применения эффективной функциональности сканирования по направлению Z.
Фиг. 8A-D иллюстрируют исполнения прекомпенсатора 200.
Фиг. 9 иллюстрируют исполнение системы 1 подачи лазерного луча с двумя сканирующими по направлению Z сканерами.
Фиг. 10 иллюстрирует таблицу конфигураций, содержащих 0, 1 или 2 сканера глубины Z и 0, 1, или 2 модификатора NA.
Фиг. 11A-C иллюстрируют сканирующий по направлениям XY сканер с 2, 3 и 4 используемыми при сканировании зеркалами.
Фиг. 12A-D иллюстрируют аберрацию как функцию числовой апертуры и соответствующую оптическую числовую апертуру NA opt (z) как функцию фокальной глубины Z.
Фиг. 13A-B иллюстрируют две установки первого блока 400 расширителя луча и перемещаемого блока 500 расширителя луча.
Фиг. 14 иллюстрирует промежуточную фокальную плоскость сканирующего по направлению Z сканера 450.
Фиг. 15 иллюстрирует исполнение объектива 700.
Фиг. 16 иллюстрирует изогнутую фокальную плоскость в целевой области.
Фиг. 17 иллюстрирует номограмму угла наклона сканирующего по направлениям XY сканера(XY-сканера).
Фиг. 18 иллюстрирует номограмму положения перемещаемого расширителя луча.
Фиг. 19 иллюстрирует стадии способа вычислительного управления.
Детальное описание
Некоторые варианты осуществления настоящего изобретения включают системы для хирургического вмешательства на хрусталике глаза, в которых используются фемтосекундные лазерные импульсы. Некоторые интегрированные варианты осуществления также способны выполнять хирургические процедуры и на роговице, и на хрусталике. Выполнение офтальмологических хирургических вмешательств на хрусталике связано с требованиями, качественно отличающимися от роговичных процедур.
Ключевые различия между описанной в настоящей заявке хирургической лазерной системой и роговичными системами включают:
1. Фемтосекундные импульсы лазера должны генерироваться надежно. Фемтосекундные импульсы лазера с высокой частотой повторения позволяют использовать гораздо меньшей энергии на импульс, обеспечивая оператору системы возможность осуществлять гораздо более совершенное управление и производить точные манипуляции. Однако надежное генерирование фемтосекундных импульсов представляет собой гораздо более сложную проблему, чем генерирование наносекундных или пикосекундных импульсов, используемых в некоторых существующих системах.
2. Хирургический лазерный луч значительно преломляется при распространении на расстояние до 5 мм преломляющей среды, включая роговицу и переднюю камеру глаза, как раз для достижения хирургической мишени, хрусталика. Напротив, лазерный луч, используемый для хирургических вмешательств на роговице, фокусируется на глубине доли миллиметра, и, таким образом, по существу не преломляется при его проникновении в роговицу из хирургической системы.
3. Хирургическая система доставки лазерного луча сконфигурирована для сканирования всей хирургической области, например, от фронтальной/передней поверхности хрусталика на обычной глубине 5 мм до задней поверхности хрусталика обычно на глубине 10 мм. Данный 5-миллиметровый или более диапазон глубины сканирования, или «диапазон сканирования по направлению Z» значительно более обширный, чем 1-миллиметровый диапазон глубины сканирования, используемый для хирургических вмешательств на роговице. Обычно, хирургическая оптическая система (оптика), особенно используемая в настоящем изобретении оптика с высокой числовой апертурой, оптимизирована для фокусировки лазерного луча на определенной глубине функционирования. Во время процедур на роговице, сканирование на глубину 1 мм вызывает лишь умеренное отклонение от оптимизированной глубины функционирования. Напротив, при сканировании на глубину от 5 до 10 мм во время хирургического вмешательства на хрусталике, система приводится в действие далеко от фиксированной оптимизированной глубины функционирования. Поэтому, в системе подачи лазерного луча для хирургического вмешательства на хрусталике используется очень совершенная адаптивная оптика для обеспечения возможности сканирования обширного диапазона глубины сканирования, требуемой для операций на хрусталике.
4. Некоторые варианты осуществления являются интегрированными в том смысле, что они сконфигурированы для выполнения хирургического вмешательства и на роговице, и на хрусталике. В этих интегрированных вариантах осуществления, диапазон глубины сканирования может составлять до 10 мм, вместо 5 мм, создавая еще более сложные проблемы.
5. Во время роговичных хирургических процедур, таких как многие варианты LASIK, лазерный луч сканируется перпендикулярно оптической оси («в плоскости XY»). В типичных процедурах, диапазон сканирования по направлениям XY охватывает только центральную часть роговицы диаметром 10 мм. Однако в интегрированных хирургических системах, могут быть также образованы дополнительные разрезы. Один тип разрезов представляет собой входные разрезы, обеспечивающие доступ вовнутрь глаза для аспирационных игл и обычных хирургических инструментов. Другой тип разрезов представляет собой лимбические релаксирующие разрезы (LRI), которые включают выполнение пары разрезов у роговичного лимба непосредственно спереди от сосудистой аркады. Путем подбора длины, глубины и локализации этих дугообразных разрезов, можно вызвать изменения роговичного астигматизма. Входные разрезы и LRI могут быть размещены на периферии роговицы, обычно с диаметром 12 мм. Хотя увеличение диаметра сканирования по направлениям XY с 10 мм до 12 мм составляет лишь увеличение на 20%, по сравнению с обычным диаметром лоскутов LASIK, существенной проблемой является удерживание под контролем внеосевых аберраций системы подачи лазерного луча при таких диаметрах, поскольку внеосевые аберрации нарастают пропорционально более высоким оптическим силам диаметра поля в фокальной плоскости.
6. Лазерные хирургические процедуры на хрусталике могут потребовать управления совершенными системами визуализации. В некоторых системах визуализации, лимбические кровеносные сосуды идентифицируются для использования в качестве контрольных меток на глазу, для калибровки цикло-вращательного совмещения глаза во время хирургической операции, в некоторых случаях относительно контрольных координат, идентифицированных во время предоперационной диагностики глаза. Кровеносные сосуды, выбранные на периферии хирургической области, могут представлять собой те, которые меньше всего затронуты во время хирургического вмешательства и, таким образом, наиболее надежны. Однако системы визуализации, направленные на такие периферические кровеносные сосуды, требуют использования визуализирующей оптики для визуализации площади с радиусом больше чем 10 мм, например, 12 мм.
7. Лазерный луч создает различные аберрации при распространении по оптическому каналу внутри глаза. Системы подачи лазерного луча могут улучшить точность путем компенсации этих аберраций. Дополнительный аспект этих аберраций состоит в том, что они зависят от частоты света, феномена, именуемого «хроматической аберрацией». Компенсирование этих зависимых от частоты аберраций увеличивает сложность задач, связанных с системой. Сложность компенсирования данных хроматических аберраций увеличивается с увеличением полосы частот лазерного луча лазерной системы. Следует напомнить, что спектральная ширина полосы пропускания луча обратно пропорциональна длительности импульса. Соответственно, ширина полосы пропускания для фемтосекундных импульсов часто больше, чем ширина полосы пропускания на порядок величины или более, вызывая необходимость гораздо лучшей хроматической компенсации в фемтосекундных лазерных системах.
8. Хирургические процедуры с использованием фемтосекундной лазерной хирургической системы с высокой частотой повторения требуют высокой точности при позиционировании каждого импульса и в абсолютном смысле в отношении целевых локализаций в ткани-мишени, и в относительном смысле в отношении предыдущих импульсов. Например, может потребоваться, чтобы лазерная система перенаправляла луч лишь на несколько микрон в пределах интервала времени между импульсами, который может составлять порядка микросекунд. Ввиду короткого интервала времени между следующими друг за другом импульсами и высокого требования к точности размещения импульса, ручное нацеливание, которое используется в существующих хирургических системах с низкой частотой повторения для операций на хрусталике, больше не является адекватным или допустимым.
9. Система доставки лазерного луча сконфигурирована для подачи фемтосекундных лазерных импульсов в весь хирургический объем хрусталика глаза через преломляющую среду при сохранении их временной, спектральной и пространственной целостности.
10. Для обеспечения того, чтобы только ткань хирургической области получала лазерный луч с достаточно высокими значениями плотности энергии для вызова хирургических эффектов, таких как абляция ткани, система доставки лазерного луча имеет необычно высокую числовую апертуру (NA). Эта высокая NA приводит к небольшим размерам пятна и обеспечивает необходимый контроль и точность выполнения хирургической процедуры. Типичные диапазоны для числовой апертуры могут включать величины NA, больше чем 0,3, приводящие к размерам пятна 3 мкм или менее.
11. Учитывая сложность оптического канала лазера для хирургического вмешательства на хрусталике, система доставки лазерного луча достигает высокой точности и контроля путем включения высокоэффективной управляемой компьютером системы визуализации, тогда как системы для хирургических вмешательств на роговице могут достичь удовлетворительного контроля без таких систем визуализации или при низком уровне визуализации. Следует отметить, что в целом, все хирургические и визуализирующие функции системы, а также обычные контролирующие лучи работают в различных спектральных частотных полосах. В качестве примера, хирургические лазеры могут работать при длинах волн в частотной полосе 1,0-1,1 мкм, контролирующих лучей - в частотной полосе видимого спектра 0,4-0,7 мкм, и визуализирующих лучей - в частотной полосе 0,8-0,9 мкм. Объединение каналов лучей или общие оптические компоненты возлагают жесткие хроматические требования на оптику лазерной хирургической системы.
Отличия 1-11 посредством нескольких примеров иллюстрируют, что офтальмологическая лазерная хирургия (i) на хрусталике (ii) с использованием фемтосекундных импульсов вносит требования, которые качественно отличаются от требований к роговичной хирургии и даже от требований к хирургии хрусталика с использованием лишь наносекундных или пикосекундных лазерных импульсов.
Фиг. 1 иллюстрирует систему 1 доставки лазерного луча. Перед ее детальным описанием, следует указать, что в некоторых вариантах осуществления комбинируется система доставки лазерного луча, показанная на фиг. 1, с системой визуализации или контроля. При некоторых хирургических процедурах на роговице, таких как при способах лечения LASIK, системы слежения за глазом устанавливают позиционные контрольные точки глаза такими визуальными ключами как идентификация центра радужной оболочки с помощью алгоритмов визуализации и обработки изображения, обычно на поверхности глаза. Однако существующие системы слежения за глазом распознают и анализируют признаки в двумерном пространстве при отсутствии информации о глубине, поскольку хирургические процедуры выполняются на роговице, являющейся самым наружным слоем глаза. Часто роговица даже уплотнена, что делает поверхность действительно двумерной.
Совершенно другая ситуация имеет место, когда луч лазера фокусируется в хрусталике, глубоко внутри глаза. Хрусталик может менять свое положение, форму, толщину и диаметр во время аккомодации не только между предыдущим измерением и операцией, но также во время операции. Прикрепление глаза к хирургическому инструменту механическими средствами может также изменить форму глаза неточно определенным образом. Такие прикрепляющие устройства могут включать фиксацию глаза присасывающим кольцом или апланацией глаза плоской или изогнутой линзой. Кроме того, движение пациента во время операции может внести дополнительные изменения. Данные изменения могут добавить смещение визуальных параметров внутри глаза, достигающее нескольких миллиметров. Поэтому, механическая привязка и фиксация поверхности глаза, такой как передняя поверхность роговицы и лимба, являются неудовлетворительными при выполнении прецизионного лазерного хирургического вмешательства на хрусталике или других внутренних частях глаза.
Для обращения к данной проблеме, система 1 подачи лазерного луча может комбинироваться с системой визуализации, как описано в одновременно рассматриваемой заявке на патент США под серийным номером 12/205844, поданной R.M. Kurtz, F. Raksi и M. Karavitis, которая включена в настоящее описание путем ссылки. Система визуализации сконфигурирована для визуализации частей изображения хирургической области с целью установления трехмерных позиционных контрольных точек на основании внутренних признаков глаза. Данные изображения могут быть созданы до операции и обновляться параллельно с хирургической процедурой для учета индивидуальных отклонений и изменений. Изображения могут использоваться для безопасного высокоточного и контролируемого направления лазерного луча в желательный участок.
В некоторых исполнениях, система визуализации может представлять собой систему оптической когерентной томографии (OCT). Визуализирующий луч системы визуализации может иметь отдельный визуализирующий оптический канал или оптический канал, частично или полностью разделяемый с хирургическим лучом. Системы визуализации с частично или полностью разделяемым оптическим каналом снижают стоимость и упрощают калибровку визуализирующей и хирургической систем. Визуализирующая система может также использовать тот же или другой источник света, что и лазер системы 1 подачи лазерного луча. Система визуализации может также иметь свои собственные лучевые сканирующие подсистемы или может использовать сканирующие подсистемы системы подачи лазерного луча. В представленной в качестве ссылки одновременно рассматриваемой заявке описываются несколько различных структур таких систем OCT.
Система 1 подачи лазерного луча может быть также исполнена в комбинации с оптикой визуального контроля. Оптика контроля может помочь оператору хирургического лазера наблюдать воздействия хирургического лазерного луча и регулировать луч в ответ на наблюдения.
Наконец, в некоторых исполнениях, в которых используется инфракрасный и, следовательно, невидимый хирургический лазерный луч, может использоваться дополнительный лазер слежения, работающий при видимых частотах. Лазер слежения, работающий в видимом диапазоне, может быть реализован для слежения за каналом инфракрасного хирургического лазера. Лазер слежения может работать при достаточно низкой энергии, чтобы не вызвать никакого разрушения целевой ткани (ткани-мишени). Оптика контроля может быть сконфигурирована для направления луча лазера слежения, отраженного от ткани-мишени, к оператору системы 1 подачи лазерного луча.
Как показано на фиг. 1, лучи, связанные с системой визуализации и оптикой визуального контроля, могут направляться в систему 1 подачи лазерного луча, например, через разделитель луча/дихроичное зеркало 600. В настоящей заявке не будут широко обсуждаться различные комбинации системы 1 подачи лазерного луча с системами визуализации, наблюдения и слежения. Большое число таких комбинаций, широко раскрытых во включенной в качестве ссылки заявке на патент США 12/205844, находится в пределах общего объема настоящей заявки.
Фиг. 1 иллюстрирует систему 1 подачи лазерного луча, которая включает лазерное устройство 100, прекомпенсатор 200, XY-сканер 300, первый блок 400 расширителя луча, подвижный блок 500 расширителя луча, разделитель луча/дихроичное зеркало 600, объектив 700 и интерфейс 800 пациента, где первый блок 400 расширителя луча и подвижный блок 500 расширителя луча будут совместно именоваться Z-сканером 450.
Во многих описанных ниже исполнениях используется условное обозначение, что направление Z представляет собой направление по существу вдоль оптического канала лазерного луча или вдоль оптической оси оптического элемента. Направления, поперечные направлению Z, именуются направлениями XY. Термин «поперечные» используется в более широком смысле для включения того, что в некоторых исполнениях поперечное направление и направление Z могут не быть строго перпендикулярными друг другу. В некоторых исполнениях, поперечные направления могут быть лучше описаны с точки зрения радиальных координат. Таким образом, термины поперечное, XY или радиальное направления обозначают аналогичные направления в описанных исполнениях, все приблизительно (но необязательно точно) перпендикулярные направлению Z.
1. Лазерное устройство 100
Лазерный устройство 100 может включать лазер для излучения лазерных импульсов с заданными параметрами лазерного излучения. Данные параметры лазерного излучения могут включать длительность импульсов в диапазоне от 1 до 100 пикосекунд или в пределах диапазона от 10 фемтосекунд до 10 пикосекунд, или в некоторых вариантах осуществления, в диапазоне от 100 фемтосекунд до 1 пикосекунды. Лазерные импульсы могут иметь энергию на импульс в диапазоне от 0,1 мкДж до 1000 мкДж, в других вариантах осуществления, в диапазоне от 1 мкДж до 100 мкДж. Импульсы могут иметь частоту повторений в диапазоне от 10 кГц до 100 МГц, в других вариантах осуществления, в диапазоне от 100 кГц до 1 МГц. Другие варианты осуществления могут иметь параметры лазерного излучения, которые входят в пределы комбинации указанных диапазонов, таких как длительность импульса 1-1000 фемтосекунд. Параметры лазерного излучения для конкретной процедуры могут быть выбраны в пределах данных диапазонов, например, во время предоперационной процедуры, или на основании расчета, который основывается на определенных данных пациента, таких как его/ее возраста.
Примеры лазерного устройства 100 могут включать Nd:стеклянный и Nd:Yag лазеры и другие лазеры из их широкого разнообразия. Рабочая длина волн лазерного устройства может находиться в инфракрасном или в видимом диапазоне. В некоторых вариантах осуществления, рабочая длина волн может находиться в диапазоне от 700 нм до 2 мкм. В некоторых случаях, рабочая длина волн может находиться в диапазоне 1,0-1,1 мкм, например, в инфракрасных лазерах на основе Yb или Nd.
В некоторых исполнениях, параметры лазерного излучения могут быть настраиваемыми и вариабельными. Параметры лазерного излучения могут быть настраиваемыми коротким временем переключения, таким образом, позволяя оператору хирургической системы 1 подачи лазерного луча изменять параметры лазерного излучения во время сложных хирургических вмешательств. Такое изменение параметров может инициироваться в ответ на считывание подсистемой регистрации или визуализации системы 1 подачи лазерного луча.
Другие изменения параметров могут выполняться в виде части многоэтапной процедуры, в течение которой система доставки лазерного луча может сначала использоваться для первой хирургической процедуры, за которой следует вторая, другая хирургическая процедура. Примеры включают сначала выполнение одного или более хирургических этапов в области хрусталика глаза, такого как стадия капсулотомии, с последующей второй хирургической процедурой в роговичной области глаза. Данные процедуры могут выполняться в различных последовательностях.
Лазеры, пульсирующие с высокой частотой повторения импульсов, работающие при частоте повторения импульсов от десятков до сотен тысяч залпов в секунду или выше с относительно низкой энергией на импульс, могут использоваться для хирургического применения с целью достижения определенных преимуществ. Такие лазеры используют относительно низкую энергию на импульс для локализации воздействия на ткань, вызываемого индуцированной лазером фотодеструкции. В некоторых исполнениях, например, степень разрушения ткани может быть ограничена несколькими микронами или несколькими десятками микрон. Данный локализованный эффект на ткани может повысить точность лазерного хирургического вмешательства и может быть желателен при определенных хирургических процедурах. В различных исполнениях таких хирургических вмешательств, многие сотни, тысячи или миллионы импульсов могут подаваться на последовательность участков, которые являются прилегающими, почти прилегающими или разделены регулируемыми расстояниями. Данные исполнения могут достичь определенных желательных хирургических эффектов, таких как разрезы, разделения и фрагментации ткани.
Параметры импульсов и картина сканирования могут быть выбраны различными способами. Например, они могут быть основаны на предоперационном измерении оптических или структурных свойств хрусталика. Лазерная энергия и разделение участков могут быть также выбраны на основании предоперационного измерения оптических и структурных свойств хрусталика или на основании зависимого от возраста алгоритма.
2. Прекомпенсатор 200
Фиг. 2 иллюстрирует, что волновой фронт лазерного луча может отклоняться от идеального поведения несколькими различными путями и по нескольким различным причинам. Большая группа таких отклонений называется аберрациями. Аберрации (и другие искажения волнового фронта) смещают точки действительного изображения от идеальных параксиальных гауссовых точек изображения. Фиг. 2 иллюстрирует волновые фронты света, выходящего через выходной зрачок ExP. Неискаженный сферический волновой фронт G испускается из зрачка и сходится в точку P1 в центре кривизны волнового фронта G. G также называется гауссовой эталонной сферой. Подвергшийся аберрации волновой фронт W отклоняется от G и сходится в другую точку P2. Аберрация ΔW подвергшегося аберрации волнового фронта W в точке Q1 может характеризоваться оптической длиной канала относительно неискаженной эталонной сферы G:
где n i представляет показатель преломления среды в пространстве изображения и
представляет расстояние между точками Q1 и Q2.
В целом, аберрация ΔW зависит от координат как в выходном зрачке, так и в фокальной плоскости. Поэтому, данная аберрация ΔW может также считаться функцией корреляции: она представляет, что набор точек, изображение которых сходится в точке P2, удаленной от точки P1 на оптической оси на r', локализуются на поверхности W, которая отклоняется от эталонной сферы G на величину ΔW на радиальном расстоянии r в выходном зрачке ExP. Для вращательно симметричной системы, ΔW может быть представлена с точки зрения разложения функций в двойной степенной ряд в r и r' в виде:

Здесь r' представляет радиальную координату точки изображения P2 в фокальной плоскости, и r представляет радиальную координату точки Ql в зрачке. Угловая зависимость представлена Θ, сферическим углом. n=2p+m представляет положительное целое число и 2l+m α nm представляют собой коэффициенты расширения подвергнутого аберрации волнового фронта W. Для справки, см., например, публикацию: Optical Imaging and Aberrations, Part I. Ray Geometrical Optics by Virendra N. Mahajan, SPIE Optical Engineering Press. Степень i обозначающего аберрацию члена представлена i=2l+m+n.
Члены до i=4 относятся к первичным аберрациям: сферической, коме, астигматизму, кривизне поля и дисторсии. Действительные связи между этими первичными аберрациями и коэффициентами аберрации 2l+m α nm документированы в литературе. Для системы, визуализирующей точечный объект, явная зависимость обозначающих аберрацию членов от радиуса изображения r' может быть подавлена введением безразмерной переменной величины ρ=r/α, где α представляет поперечную линейную меру выходного зрачка, такую как его радиус:

где

Преимущество данного обозначения состоит в том, что все коэффициенты аберрации αnm имеют размер длины и представляют максимальную величину соответствующей аберрации в выходном зрачке. В данном обозначении, например, сферическая аберрация характеризуется коэффициентом аберрации α40.
Хотя описание аберрации с точки зрения коэффициентов аберрации αnm математически четко определено, это не всегда экспериментально наиболее доступный подход. Поэтому, далее описаны альтернативные критерии аберрации.
В той же тенденции экспериментальной доступности и возможности тестирования, следует отметить, что измерение поведения луча в биологической ткани, такой как глаз, может не быть самым легким. С пользой проведенные исследования указывают на то, что лучи в глазу могут вести себя очень похожим образом на поведение лучей в соленой воде с физиологически целесообразной концентрацией соли, где они могут быть количественно измерены и описаны. Поэтому, по всей заявке, когда описывается поведение системы подачи лазерного луча в глазу, понятно, что это описание относится к поведению или в описываемой ткани глаза, или в соответствующей соленой воде.
Фиг. 3A-C иллюстрируют второй показатель аберраций. Система 1 подачи лазерного луча, которая была сконфигурирована для фокусировки луча в фокальной плоскости 210 на глубине A, может вместо этого вызвать сферическую аберрацию, если она работает для фокусировки луча в рабочей фокальной плоскости 211, на глубине B. Такая ситуация может возникать, например, во время процедуры трехмерного сканирования, когда фокальная точка лазерного луча перемещается с фокальной плоскости 210 к фокальной плоскости 211.
Фиг. 3A иллюстрирует случай, когда система 1 подачи лазерного луча фокусирует лучи на их оптимальную фокальную плоскость 210. Лучи проходят через участок в оптимальной фокальной плоскости 210 («фокальное пятно») очень узкой радиальной протяженности, или радиус r f (A). Данная радиальная протяженность r f (A) может быть больше нуля по разнообразным причинам, таким как дифракция светового луча. Радиус фокального пятна может быть определен более чем одним путем. Общее определение r f (A) представляет минимальный радиус светового пятна на экране как позиции экрана, изменяющейся вдоль осевого или направления Z. Данная глубина Z часто называется «точкой наименьшей помехи». Это определение дополнительно уточняется в отношении фиг. 3C.
Фиг. 3B иллюстрирует случай, где система 1 подачи лазерного луча сканирует фокус на некотором расстоянии, таком как несколько миллиметров, в сторону от оптимальной фокальной плоскости 210 к рабочей фокальной плоскости 211. Визуально, лучи проходят через фокальное пятно радиуса r f (B), большего, чем r f (A), вызывая сферическую аберрацию. Были разработаны математические формулы различной точности, связывающие коэффициенты аберрации α nm и радиус фокального пятна r f. В некоторых случаях, радиус фокального пятна r f представляет собой экспериментально более доступную меру для количественного определения аберраций, чем коэффициенты аберрации α nm.
Фиг. 3C иллюстрирует более количественное определение радиуса фокального пятна r f. Фиг. 3C иллюстрирует энергию, содержащуюся в пятне с радиусом r, измеренного от центроида луча. Широко принятое определение радиуса фокального пятна r f представляет собой радиус, в пределах которого содержится 50% энергии луча. Кривая, отмеченная буквой «A», показывает, что в ограниченном дифракцией луче, когда луч фокусируется на его оптимальную фокальную плоскость 210, как показано на фиг. 3A, 50% энергии луча может содержаться или заключаться в пятне с радиусом r=0,8 мкм, обеспечивая полезное определение r f(A).
Хирургические процедуры, основанные на вызванном лазером оптическом разрушении (LIOB), могут иметь более высокую точность и эффективность и меньшие нежелательные эффекты, если энергия лазерного луча осаждается в четко или резко ограниченном фокальном пятне. LIOB представляет собой нелинейный процесс с порогом интенсивности (плазменном): обычно, ткань, подвергнутая воздействию луча с интенсивностью, превышающей плазменный порог, превращается в плазму, тогда как ткань, подвергнутая воздействию луча с интенсивностью ниже плазменного порога, не подвергается плазменному переходу. Поэтому, расширение фокального пятна аберрацией уменьшает фракцию луча, которая в фокальной плоскости достигает интенсивности, превышающей плазменный порог, и увеличивает фракцию луча, интенсивность которой остается ниже порога. Последняя из указанных фракций луча эффективно не поглощается целевой тканью и продолжает распространяться через глазную ткань, в большинстве случаев к сетчатке, потенциально вызывая нежелательное воздействие на сетчатку.
Для хирургических процедур, нацеленных на коррекцию роговицы, фокальная плоскость обычно сканируется или сдвигается в направлении Z (по оптической оси) лишь примерно на 0,6 мм от ее оптимальной или номинальной глубины, поскольку толщина роговицы составляет по существу 0,6 мм, в редких случаях толще, но все же не превышает 1 мм. Кривая, отмеченная буквой «B», иллюстрирует, что когда фокальная плоскость луча сдвигается от его оптимальной фокальной плоскости 210 на 1 мм (верхняя оценка для роговичных процедур) к рабочей фокальной плоскости 211, то 50% энергии луча удерживается в пределах радиуса фокального пятна r f (B)=l,8 мкм. Хотя данный сдвиг вносит аберрацию, но ее величина ограничена. Соответственно, некоторые из существующих роговичных лазерных систем совсем не компенсируют данную аберрацию, хотя другие вносят лишь некоторый ограниченный уровень компенсации.
Кроме коэффициентов аберрации α mn и радиуса фокального пятна r f, третий показатель аберрации представляет собой так называемое число Штреля S. Число Штреля S системы можно определить, обращаясь к лучу, который испускается точечным источником, как пиковую интенсивность луча в фокальной плоскости системы, деленную на теоретическую максимальную пиковую интенсивность эквивалентной совершенной системы визуализации, которая работает на пределе дифракции. Эквивалентные определения также известны в литературе и находятся в пределах объема определения числа Штреля S.
В соответствии с данным определением, чем меньше величина S, тем больше аберрация. Не подвергнутый аберрации луч имеет S=1 и обычно, когда S>0,8, то считается, что система визуализации ограничена дифракцией.
Четвертым определением аберраций является ω, ошибка среднего квадратического значения или ошибка RMS волнового фронта, которая выражает отклонение ΔW подвергнутого аберрации волнового фронта W от неискаженного волнового фронта G, как показано на фиг. 2, усредненного по всему волновому фронту в выходном зрачке ExP. ω выражена в единицах длины волн луча, делая ее безразмерной величиной.
Фиг. 4 иллюстрирует, что относительно небольшие аберрации ω и S связываются следующей эмпирической формулой:
S≈e -(2πω)2 (4)
независимо от типа аберрации, где e представляет собой основание натурального логарифма.
Все четыре указанных выше критерия или показателя аберрации могут использоваться для диагностики проблем и оптимизации конструкции системы 1 подачи лазерного луча. Соответственно, ниже общая терминология «критерий аберрации» может относиться к любому из данных критериев или к их эквивалентам. Следует отметить, что увеличение аберрации определяется увеличением коэффициентов аберрации α mn, радиуса фокального пятна r f и ошибки RMS волнового фронта ω, но уменьшением числа Штреля S.
Связь между данными показателями аберрации демонстрируется показом коэффициента сферической аберрации α 40 и соответствующего числа Штреля S в определенном примере. В данном примере, хирургическая лазерная система фокусирует лазерный луч в глазной ткани на различных глубинах ниже его поверхности. Лазерный луч ограничивается дифракцией, при длине волн 1 мкм и числовой апертуре NA=0,3, и фокусируется на поверхности ткани под нормальным углом падения. Величины данного примера могут быть аналогичными эффектам добавления параллельной плоскости пластины толщиной, равной сканированной глубине около фокальной плоскости системы, и проведения расчета для соленой воды.
Поверхность ткани вносит аберрации в луч, характеризуемую уравнениями (2) и (3). Сферическая аберрация, характеризуемая коэффициентом аберрации α 40, равна нулю на поверхности, число Штреля, по самой его конструкции составляет S=1.
Хирургические вмешательства LASIK обычно формируют лоскуты на глубине 0,1 мм. На этих глубинах, число Штреля S уменьшается примерно до 0,996, что является лишь небольшим уменьшением. Даже на глубине 0,6 мм, приблизительно на задней поверхности роговицы, S составляет примерно 0,85. Хотя это представляет уменьшение пиковой интенсивности, которым нельзя пренебречь, его все же можно компенсировать регулированием интенсивности лазерного луча.
С другой стороны, на глубине 5 мм, характеризующей переднюю поверхность хрусталика в глазу, число Штреля S может уменьшаться до S=0,054. На данной глубине и при данном числе Штреля S, интенсивность луча снижается значительно ниже плазменного порога и, таким образом, луч неспособен генерировать LIOB. Данная резкая потеря пиковой интенсивности не может быть компенсирована увеличением мощности лазера без нежелательных эффектов, таких как серьезное избыточное воздействие на сетчатку или избыточно увеличенный размер пузырьков.
В таблице 1 иллюстрируется сферическая аберрация α40, соответствующая только что описанным числам Штреля. Визуально, сферическая аберрация увеличивается приблизительно линейно с глубиной ткани, тогда как число Штреля S ведет себя нелинейным образом:
При хирургических процедурах, нацеленных на выполнение лизиса (разрушения) хрусталика, капсулотомию или другие хирургические процедуры на хрусталике, фокальная плоскость часто сканируется по всей глубине хрусталика, которая может составлять до 5 мм. Кроме того, в интегрированной системе роговицы-хрусталика, общая глубина сканирования может простираться от роговицы до задней поверхности хрусталика, примерно на 10 мм. Кривая, отмеченная буквой «C» на фиг. 3C, указывает, что в таких случаях радиус фокального пятна возрастает до r f (C)=18 мкм, и данная величина слишком велика для того, чтобы даже появиться на том же графике, что и r f (A) и r f (B). В некоторых вариантах осуществления, оптимальная фокальная плоскость может быть выбрана для нахождения на полпути диапазона сканирования по глубине, и лазерный луч может сканироваться в диапазоне глубины плюс/минус 5 мм. В данном случае r f (C) может быть уменьшен до 10 мкм.
Эти большие величины r f (C) транслируются на большое количество аберрации в трех других показателях аберрации α 40, S и ω. Ясно, что в отличие от роговичных процедур, которые сканируют лишь несколько десятых долей миллиметра, данные большие аберрации при хирургии хрусталика ставят многочисленные проблемы перед конструкцией системы 1 подачи лазерного луча для компенсации или возможности справиться с их нежелательными последствиями.
Для решения проблемы больших показателей аберрации, связанных с хирургией хрусталика, некоторые варианты осуществления включают прекомпенсатор 200 для прекомпенсации сферической аберрации и улучшения критериев аберрации. Эти аберрации могут развиться в целевой ткани или вдоль части оптического канала внутри системы 1 подачи лазерного луча, или вдоль всего оптического канала.
Фиг. 5 иллюстрирует (не в масштабе), что поскольку критерии (показатели) аберрации r f (C), α 40, S и ω зависят от глубины фокального пятна z и его радиального расстояния r от оптической оси, то в том, что следует, когда описывается, что критерий аберрации допускает некоторую величину, это будет относиться к критерию аберрации, допускающему описанную величину в некоторых выбранных контрольных точках. Набор релевантных контрольных точек может быть описан их цилиндрическими координатами (z, r): P1=(0,0), P2=(2,6), P3=(5,0), P4=(8,0), P5=(8,3), все в миллиметрах. Поскольку основные структуры глаза проявляют приблизительную цилиндрическую симметрию, то указанные контрольные точки P могут быть расположены под любым углом φ азимута. Поэтому, данные точки будут указываться только двумя из их трех цилиндрических координат, причем подавляется углом φ азимута. P1 представляет типичную точку для центрально локализованной роговичной процедуры, P2 является типичной для периферических роговичных процедур, P3 связана с передней областью хрусталика, P4 связан с задней частью хрусталика, и P5 представляет периферическую контрольную точку хрусталика. Для характеристики аберраций системы подачи лазерного луча могут быть также приняты другие контрольные точки. В некоторых случаях, критерии аберрации могут относиться к критерию аберрации, усредненному по рабочему волновому фронту или области освещения.
Критерии аберрации могут быть определены несколькими различными путями. Волновой фронт лазерного излучения может прослеживаться в способе автоматизированного проектирования с помощью компьютера (CAD) при прохождении через выбранный участок оптического канала, такого как модель целевой ткани, или участка системы 1 подачи лазерного луча. Или аберрация лазерного луча может быть измерена в действительной системе подачи лазерного луча, или комбинацией этих двух процедур.
Соответственно, в некоторых исполнениях, прекомпенсация, вводимая прекомпенсатором 200, может быть выбрана определением, расчетом или измерением критерия аберрации вдоль выбранного участка оптического канала, который может включать саму целевую ткань, и затем определением количества прекомпенсации, которое требуется для компенсации предварительно выбранной части определенной/рассчитанной/измеренной аберрации.
Прекомпенсатор 200 может эффективно корректировать или прекомпенсировать сферическую аберрацию, потому что сферические аберрации преимущественно воздействуют на осевые лучи. Другие типы аберраций, такие как поперечные аберрации, астигматизм и кома, воздействуют на лучи не нулевого угла, а также лучи поля, включая лучи, смещенные от оптической оси. Хотя лазерный луч, генерируемый лазерным устройством 100, является по существу осевым лучом, различные блоки в оптическом канале, наиболее значительно, сканирующий по направлениям XY-сканер 300, трансформируют данный луч в луч не нулевого угла, имеющий лучи поля.
Поэтому, в конструкциях, где прекомпенсатор помещен после XY-сканера 300, лучи поля пучка могут проявлять несколько различных аберраций. Данное появление различных аберраций создает большие проблемы для конструирования, потому что (i) оптимизация луча лучей может потребовать компенсацию нескольких аберраций и (ii) различные типы аберраций не являются независимыми друг от друга. Таким образом, компенсация одного типа аберрации обычно вызывает нежелательные другие типы аберрации.
Поэтому, в конструкциях, где компенсатор помещен после XY- сканера, сферические аберрации обычно компенсируются лишь в ограниченной степени и за счет введения других типов нежелательных аберраций.
Напротив, варианты осуществления настоящей системы 1 подачи лазерного луча могут иметь прекомпенсатор 200 перед XY-сканером 300. Данная конструкция позволяет прекомпенсатору 200 предварительно компенсировать сферическую аберрацию без привнесения других типов нежелательных аберраций.
В некоторых исполнениях может даже использоваться указанная выше взаимозависимость осевых и внеосевых аберраций путем внесения осевой предварительной компенсации прекомпенсатором 200 для предварительной компенсации внеосевой аберрации, вызванной последующим участком системы подачи лазерного луча или целевой тканью.
Фиг. 6A-B схематически иллюстрируют идеализированную работу прекомпенсатора 200.
Фиг. 6A иллюстрирует систему 1 подачи лазерного луча без прекомпенсатора. В целом, сегмент 301 оптического канала может внести некоторый уровень сферической аберрации. Это показано неискаженным волновым фронтом, поступающим в сегмент 301 оптического канала и волновым фронтом с аберрацией, выходящим из сегмента 301 оптического канала. Данный сегмент может представлять собой любой сегмент оптического канала, такой как часть целевой ткани, или вся целевая ткань, или часть канала внутри системы 1 подачи лазерного луча.
Фиг. 6B иллюстрирует, что прекомпенсатор 200 может внести компенсирующую (или дополнительную) дисторсию волнового фронта. Данный предварительно компенсированный волновой фронт затем поступает в сегмент 301 оптического канала, вызывая выход из него волнового фронта со сниженным искажением (дисторсией) или даже без искажения.
Некоторые существующие системы вообще не имеют специализированного компенсатора. Другие системы могут компенсировать сферическую аберрацию только распределенным образом линзами из группы линз, которые также имеют другие функции, и расположены после XY-сканера. В данных существующих системах, параметры линз выбраны в результате достижения компромиссов между различными функциями, приводя к ограничениям в их эффективности.
Напротив, варианты осуществления системы 1 подачи лазерного луча могут иметь специализированный прекомпенсатор 200, расположенный перед XY-сканером 300. В некоторых вариантах осуществления, прекомпенсатор 200 представляет собой первый оптический блок или группу линз, которая принимает лазерный луч из лазерного устройства 100. Поскольку ввиду его локализации лазерный луч достигает прекомпенсатор 200 без развития лучей не нулевого угла или лучей поля (которые могут быть вызваны XY- сканером 300), данные варианты осуществления могут достичь высокого уровня предварительной компенсации. Предварительная компенсация также эффективна, потому что она представляет собой первоочередную функцию прекомпенсатора 200, и, таким образом, могут удерживаться очень ограниченные компромиссы конструкции, в отличие от существующих систем, которые осуществляют компенсацию линзами, служащими для выполнения дополнительных функций.
По этим причинам, в таких исполнениях, возможна коррекция сферической аберрации в высокой степени без воздействия или внесения других типов аберраций.
В теории аберраций известно, что сферическая аберрация системы составных линз составляет приблизительно сумму сферических аберраций отдельных компонентов. Поэтому, в некоторых исполнениях системы 1 подачи лазерного луча, нежелательное количество сферической аберрации может быть предварительно компенсировано конструированием прекомпенсатора 200 для внесения равного количества аберрации, но с противоположным знаком.
В качестве примера, когда глубина фокального пятна внутри глазной ткани смещается на 5 мм от его оптимальной фокальной плоскости, то сферическая аберрация α 40 (в соответствии с таблицей 1) составляет -2,0 мкм. Соответственно, в некоторых исполнениях прекомпенсатор 200 может вводить величину аберрации α 40=+2,0 мкм. В первом приближении, данная предварительная компенсация может по существу устранить сферическую аберрацию, вызванную сдвигом фокального пятна на 5 мм и, соответственно, увеличить число Штреля от S=0,054 обратно до S=1. (Данный простой пример не учитывал другие источники аберраций).
Некоторые описанные ниже исполнения будут охарактеризованы путем сравнения критериев аберрации «не прекомпенсированных» систем 1 подачи лазерного луча, т.е., систем подачи лазерного луча, где прекомпенсатор 200 был удален, с «прекомпенсированными» системами подачи лазерного луча, т.е., системами, где прекомпенсатор 200 не был удален.
В некоторых исполнениях, установка прекомпенсатора 200 может увеличить число Штреля с величины S<S(precomp) не прекомпенсированной системы 1 подачи лазерного луча до величины S>S(precomp) для предварительно компенсированной системы 1 подачи лазерного луча. В некоторых исполнениях, S(precomp) может составлять, например, 0,6, 0,7, 0,8 или 0,9.
Как указано выше, число Штреля S здесь и ниже может относиться к любым из чисел Штреля S(P1), … S(P5) в указанных выше контрольных точках P1-P5, или к числу Штреля в некоторых других заданных контрольных точках, или к средней величине числе Штреля по пяти контрольным точкам, или к средней величине по рабочему волновому фронту.
Число Штреля может также относиться ко всей системе 1 доставки лазерного луча, принимающей лазерный луч из лазерного устройства 100, кончая объективом 700 и образуя фокальное пятно в целевой ткани глаза. В некоторых других случаях, данное условие может относиться к другим мишеням, включая воздух. В некоторых исполнениях, данное условие может относиться к подсистеме системы 1 доставки лазерного луча.
В некоторых исполнениях, добавление прекомпенсатора 200 к не прекомпенсированной системе 1 доставки луча может увеличить число Штреля от не предварительно компенсированной величины ниже S=S(precomp) до предварительно компенсированной величины выше S=S(precomp) для импульсов, имеющих ассоциированную полосу пропускания, по меньшей мере, на порядок превышающую величину трансформационно-ограниченной полосы пропускания лазерных импульсов с длительностью пикосекунды или дольше. Как указано выше, S(precomp) может составлять, например, 0,6, 0,7, 0,8 или 0,9.
В некоторых исполнениях, добавление прекомпенсатора 200 к системе 1 доставки лазерного луча может увеличить число Штреля с не компенсированной величины ниже S=S(precomp) до предварительно компенсированной величины выше S=S(precomp) в диапазоне длины волн от 0,4 мкм до 1,1 мкм. Как указано выше, S(precomp) может составлять, например, 0,6, 0,7, 0,8 или 0,9.
В некоторых исполнениях, добавление прекомпенсатора 200 к системе доставки лазерного луча может увеличить числовую апертуру системы с не прекомпенсированной величины ниже NA=NA(precomp), соответствующей системе 1 доставки лазерного луча без прекомпенсатора 200, до предварительно компенсированной величины выше NA=NA(precomp) с прекомпенсатором 200. В некоторых исполнениях, величина NA(precomp), может составлять, например, 0,2, 0,25, 0,3 или 0,35.
В некоторых исполнениях, добавление прекомпенсатора 200 к системе 1 доставки лазерного луча без него может уменьшить радиус фокального пятна r f в целевой ткани с не прекомпенсированной величины выше r f (precomp) до предварительно компенсированной величины ниже r f (precomp), соответствующей системе 1 доставки лазерного луча с прекомпенсатором 200. В некоторых исполнениях, r f (precomp), может составлять 2, 3 или 4 мкм.
В некоторых исполнениях, установка прекомпенсатора 200 может увеличить ошибку RMS волнового фронта с величины ω>ω(precomp) не прекомпенсированной системы 1 доставки лазерного луча до величины ω<ω(precomp) для предварительно компенсированной системы 1 доставки лазерного луча. В некоторых исполнениях, ω(precomp) может составлять 0,06, 0,07, 0,08 или 0,09, например, все в единицах длины волн лазерного излучения.
В некоторых исполнениях, установка прекомпенсатора 200 может увеличить коэффициент сферической аберрации с величины α 40 >α 40 (precomp) не прекомпенсированной системы 1 доставки лазерного луча до величины α 40 <α 40 (precomp) для предварительно компенсированной системы 1 доставки лазерного луча. В некоторых исполнениях α 40 (precomp) может составлять, например, 2, 3 или 4 мкм.
В некоторых исполнениях, установка прекомпенсатора 200 в не прекомпенсированную систему 1 доставки лазерного луча может снизить, по меньшей мере, один из следующих критериев аберрации: ошибку RMS волнового фронта ω, величину сферической аберрации α 40 и радиус фокального пятна r f с не прекомпенсированной величины, по меньшей мере, на процентную долю предварительной компенсации P(precomp), или увеличить число Штреля S, по меньшей мере, на процентную долю предварительной компенсации P(precomp). В некоторых исполнениях, P(precomp) может составлять, например, 10%, или 20%, или 30%, или 40%.
Как описано выше, любой из критериев аберрации может относиться к любой из контрольных точек Р1, …, P5, или к некоторым другим заданным контрольным точкам, или к среднему значению величин в контрольных точках, или может представлять собой среднюю величину по волновому фронту.
В некоторых вариантах осуществления, прекомпенсатор 200 может компенсировать не сферические аберрации, такие как также аберрации первого или более высокого порядка. В некоторых случаях, он может также выполнять предварительную компенсацию внеосевых лучей.
В некоторых исполнениях, прекомпенсатор 200 предварительно компенсирует другие типы аберраций, в то же время, не увеличивая ошибку RMS волнового фронта более чем на 0,075, или путем поддержания числа Штреля выше S(precomp), имеющего, например, величину 0,8.
В некоторых исполнениях, прекомпенсатор 200 может увеличить радиус луча rb, выходящего из прекомпенсатора 200, до величины выше rb=rb(precomp), где rb(precomp) может составлять, например, 5 мм или 8 мм.
Некоторые из указанных функций могут достигаться включением одной или более подвижных линз в прекомпенсатор 200. Позиционные приводы могут передвигать подвижную линзу или линзы, меняя расстояние между некоторыми из линз прекомпенсатора 200.
В некоторых исполнениях с подвижной линзой, подвижная линза прекомпенсатора 200 может перемещать фокальную плоскость или пятно системы 1 доставки лазерного луча по оптической оси на 0,3-4,0 мм. В некоторых других исполнениях, на 0,5-2,0 мм.
В некоторых исполнениях, когда, по меньшей мере, одно из чисел Штреля S(low) в описанных выше контрольных точках P1, … P5 ниже S=S(movable), когда подвижная линза находится в среднем положении, подвижная линза может перемещаться для увеличения числа Штреля S(low) до величины выше S=S(movable). S(movable) может составлять 0,6, 0,7, 0,8 или 0,9.
В некоторых исполнениях, подвижная линза может перемещаться для изменения числа Штреля в диапазоне 0,6-0,9. В других исполнениях, в диапазоне 0,70-0,85.
Поскольку прекомпенсатор 200 расположен перед XY-сканером 300 или других расширителей лучевого луча, радиус лучевого луча еще остается маленьким. Поэтому, подвижная линза может быть маленькой. И, поскольку подвижная линза маленькая, позиционные приводы могут передвигать ее очень быстро, обеспечивая возможность очень быстрого изменения фокальной глубины. Данный признак ускоряет глубинное сканирование или сканирование по направлению Z в данных вариантах осуществления и может сделать скорость сканирования по направлению Z сравнимой с обычно более высокой скоростью сканирования по направлениям XY.
В некоторых типичных существующих системах, аберрации компенсируются преимущественно оптическими средствами, такими как линзы. Описанный в настоящей заявке прекомпенсатор 200 с подвижной линзой может использовать быстро перемещаемую линзу или линзы для качественного осуществления данной функции. В частности, когда лазерный луч сканируется XY-сканером 300, подвижная линза или линзы могут передвигаться с достаточно высокой скоростью с тем, чтобы аберрации, связанные со сканированием по направлениям XY, были компенсированы до желательного уровня.
Фиг. 7A иллюстрирует, что данный аспект может использоваться, когда поперечный хирургический разрез 206 выполняется по существу, следуя вдоль контактной поверхности плоскостного или искривленного интерфейса пациента 208. Скорость перемещения маленькой подвижной линзы обеспечивает возможность выполнения сканирования по направлению Z со скоростью, требуемой для сканирования по направлениям XY, образуя желательный искривленный разрез.
В некоторых исполнениях, кривизна или радиус искривленного разреза или искривленной целевой линии, может быть меньше чем 1 мм, 10 мм и 100 мм.
Фиг. 7B иллюстрирует другой полезный аспект высокой скорости сканирования по направлению Z. Фокальная плоскость большинства оптических систем несколько искривлена. Если желательно создание по существу прямого поперечного разреза, который поэтому не повторяет кривизну фокальной плоскости, то необходимо непрерывно подрегулировать фокальную глубину синхронно с быстрым поперечным сканированием по направлениям XY для компенсации кривизны фокальной плоскости. Например, для радиальных разрезов или плоскостных разрезов с разверткой растрового типа, изменение радиальной или XY координаты может быть очень быстрым. При этих процедурах, высокая скорость сканирования по направлению Z может помочь формированию желательного прямого разреза.
Наконец высокая скорость сканирования по направлению Z может также использоваться для быстрого выполнения некоторых хирургических процедур, таких как роговичные процедуры.
В некоторых исполнениях, прекомпенсатор 200 с подвижной линзой может изменять глубину фокального пятна системы доставки лазерного луча с осевой скоростью, по меньшей мере, 5% максимальной скорости поперечного сканирования фокального пятна. В некоторых исполнениях, с осевой скоростью, по меньшей мере, 10% максимальной скорости поперечного сканирования фокального пятна. В других вариантах осуществления, с осевой скоростью, по меньшей мере, 20% максимальной скорости поперечного сканирования фокального пятна.
В некоторых исполнениях, прекомпенсатор 200 с подвижной линзой может изменять координату Z фокального пятна на 0,5-1 мм во время сканирования по направлению Z.
В некоторых исполнениях, данное время сканирования по направлению Z может находиться в диапазоне 10-100 наносекунд, от 100 наносекунд до 1 миллисекунды, от 1 миллисекунды до 10 миллисекунд и от 10 миллисекунд до 100 миллисекунд.
В некоторых исполнениях, подвижная линза из группы линз может перемещаться в диапазоне перемещения по направлению Z для уменьшения первого критерия аберрации, по меньшей мере, на процентную долю перемещения P(movable). Здесь, первый критерий аберрации может представлять собой коэффициент сферической аберрации α 40, ошибку RMS волнового фронта ω, и радиус фокального пятна r f, и процентная доля перемещения P(movable) может составлять 10%, 20%, 30% и 40%.
В некоторых исполнениях, подвижная линза из группы линз может перемещаться в диапазоне перемещения по направлению Z для увеличения числа Штреля S, по меньшей мере, на процентную долю перемещения P(movable), которая может составлять 10%, 20%, 30% и 40%.
В некоторых исполнениях, прекомпенсатор 200 с подвижной линзой может изменять числовую апертуру NA системы 1 доставки лазерного луча, глубину Z фокального пятна, любой из критериев аберрации и диаметр луча лучей, по существу путем перемещения подвижной линзы. Другими словами, перемещение подвижной линзы может изменять любую из указанных четырех характеристик системы 1 доставки лазерного луча без изменения других двух характеристик. Данные варианты осуществления предоставляют оператору оборудования возможность существенного контроля.
Некоторые из функций прекомпенсатора 200 иногда именуются «кондиционированием» (приведением в соответствие) луча или расширением луча. Соответственно, в некоторых существующих системах блоки, выполняющие аналогичные функции, именуются кондиционерами луча лучей или расширителями луча лучей.
В некоторых вариантах осуществления, прекомпенсатор 200 включает только одну линзу для достижения описанных выше функциональных возможностей.
В некоторых вариантах осуществления, прекомпенсатор 200 включает от двух до пяти линз для достижения описанных выше функциональных возможностей.
Фиг. 8A иллюстрирует трехлинзовый вариант осуществления прекомпенсатора 200, включающего линзу 221, линзу 222 линзу 223.
Фиг. 8B иллюстрирует трехлинзовый вариант осуществления прекомпенсатора 200' с подвижной линзой, включающий линзу 221', подвижную линзу 222' и линзу 223'.
Фиг. 8C иллюстрирует четырехлинзовый вариант осуществления прекомпенсатора 200", включающего линзы 231-234.
Фиг. 8D иллюстрирует четырехлинзовый вариант осуществления прекомпенсатора 200'" с подвижной линзой, включающий линзу 231', подвижную линзу 232', линзу 233' и линзу 234'.
Таблицы 2-4 иллюстрируют различные трехлинзовые осуществления прекомпенсаторов 200 и 200', иллюстрируемых на фиг. 8A-B. Варианты осуществления прекомпенсатора 200 могут быть исполнены с использованием тонких линз. Поэтому, они могут быть описаны с точки зрения преломляющей способности отдельных линз и их расстояний от следующей линзы.
Таблица 2 иллюстрирует трехлинзовый вариант осуществления прекомпенсатора 200 с фиксированными линзами, также показанного на фиг. 8A. В таблице 2 в колонке 1 показан номер линзы, в колонке 2 показана преломляющая способность, измеренная в диоптриях Di (i=1, 2, 3), и в колонке 3 - расстояние di (i=1, 2) между линзами i и i+1.
для фиг. 8A
Таблица 3 иллюстрирует возможное исполнение прекомпенсатора 200' с двумя подвижными линзами 222' и 223', как показано на фиг. 8B, на котором показаны промежутки diA и diB в двух конфигурациях A и B в колонках 3 и 4. Промежутки между линзами di могут непрерывно варьироваться между diA и diB.
для фиг. 8B
Таблица 4 иллюстрирует, что в различных исполнениях указанные выше параметры Di и di могут допускать величины в широких интервалах, в зависимости от большого числа конструкции, таких как различные размеры пучков лучей и доступное пространство. Некоторые из параметров данных исполнений могут быть связаны с вариантами осуществления, представленными в таблицах 2-3, путем масштабирования: величины преломляющей способности коэффициентом масштабирования α, и расстояний - соответствующим коэффициентом масштабирования 1/α. Кроме того, величины преломляющей способности могут быть дополнительно модифицированы факторами допуска с t1 по t3 для обеспечения возможности различий допусков и конструктивных исполнений. Эти зависимости сведены в таблице 4:
для фиг. 8А-B
В некоторых исполнениях, коэффициент масштабирования α может находиться в диапазоне от 0,3 до 3, а факторы допуска t1, t2 и t3 могут находиться в диапазоне от 0,8 до 1,2.
Аналогично, таблица 5 иллюстрирует различные четырехлинзовые исполнения прекомпенсатора 200", где линзы 231, 232, 233 и 234 фиксированы, как показано на фиг. 8C.
для фиг. 8C
В таблице 6 иллюстрируется четырехлинзовое исполнение прекомпенсатора 200'" фиг. 8D с одной подвижной линзой 232'.
для фиг. 8D
Как и в трехлинзовых исполнениях, параметры четырехлинзовых прекомпенсаторов 200" и 200'" могут допускать величины в широких диапазонах. Параметры некоторых из указанных исполнений снова могут быть связаны друг с другом соответственно коэффициентами масштабирования α, 1/α, t1, t2, t3 и t4, по аналогии с таблицей 4. Коэффициент масштабирования α может находиться в диапазоне от 0,2 до 5, а факторы допуска t1, …, t4 могут находиться в диапазоне от 0,7 до 1,3.
В других вариантах осуществления, используются другие комбинации и диапазоны. В пределах данных диапазонов, возможны многие варианты осуществления системы 1 доставки лазерного луча, поскольку система может быть оптимизирована для многих различных функциональных возможностей, приводящих к различным выборам. Конструкционные компромиссы и ограничения оптимизации могут привести к большому числу исполнений, каждое из которых имеет свои собственные преимущества. Большое число возможностей иллюстрируется диапазонами параметров в представленных выше таблицах 2-6.
В исполнении прекомпенсатора 200' подвижная линза может изменять одну из характеристик лазерной системы по существу независимо. Данные параметры включают фокальную глубину Z, числовую апертуру NA, любой из критериев аберрации и диаметр выходящего пучка лучей. Например, данные исполнения позволяют оператору изменять, например, числовую апертуру системы 1 доставки лазерного луча, без изменения, например, фокальной глубины Z.
В некоторых исполнениях, прекомпенсатор 200 имеет два независимо движущихся элемента. Такие исполнения позволяют оператору независимо регулировать две характеристики луча лазерных лучей, такие как, например, диаметр луча лучей и числовую апертуру NA, в то же время, удерживая фиксированные аберрации.
Фиг. 9 иллюстрирует вариант осуществления системы 1' доставки лазерного луча, где на первый план выдвинута функция сканирования по направлению Z различных оптических блоков. В частности, лазерное устройство 100 генерирует лазерный луч, который принимается первым Z-сканером 250. Первый Z-сканер 250 принимает лазерный луч из лазерного устройства 100 и сканирует фокальную точку системы 1' доставки лазерного луча через первый интервал Z по оптической оси системы 1' доставки лазерного луча. Луч, испускаемый первым Z-сканером 250, принимается XY-сканером 300, который сканирует лазерным лучом в направлении, по существу поперечном оптической оси лазерной системы. Затем испускаемый сканирующий по направлениям XY лазерный луч принимается вторым Z-сканером 450, который сканирует фокальную точку лазерной системы через второй интервал Z по оптической оси лазерной системы.
В некоторых вариантах осуществления, первый Z-сканер 250 сконфигурирован так, чтобы первый интервал Z подходил для роговичной хирургической процедуры, а второй Z-сканер 450 сконфигурирован так, чтобы второй интервал Z подходил для хирургической процедуры на переднем сегменте.
В некоторых вариантах осуществления, первый интервал Z находится в диапазоне 0,05-1 мм, а второй интервал Z находится в диапазоне 1-5 мм.
В некоторых вариантах осуществления, первый интервал Z находится в диапазоне 1-5 мм, а второй интервал Z находится в диапазоне 5-10 мм.
В некоторых вариантах осуществления, первый Z-сканер 250 сконфигурирован для сканирования фокальной точки через первый интервал Z 0,05 мм - 1 мм во время первого сканирования по направлению Z. Время первого сканирования по направлению Z может находиться в одном из диапазонов 10-100 наносекунд, 100 наносекунд - 1 миллисекунда, 1 миллисекунда - 10 миллисекунд и 10 миллисекунд - 100 миллисекунд.
В некоторых вариантах осуществления, второй Z-сканер 450 сконфигурирован для сканирования фокальной точки через второй интервал Z 1 мм - 5 мм во время первого сканирования по направлению Z. Время второго сканирования по направлению Z может находиться в одном из диапазонов 10-100 миллисекунд и 100 миллисекунд - 1 секунда.
В некоторых вариантах осуществления, первый Z-сканер 250 сконфигурирован для изменения числовой апертуры лазерного луча более чем на 10%.
В некоторых вариантах осуществления, второй Z-сканер 450 сконфигурирован для изменения числовой апертуры лазерного луча более чем на 10%.
В некоторых вариантах осуществления, первый Z-сканер 250 сконфигурирован для изменения числовой апертуры лазерного луча более чем на 25%.
В некоторых вариантах осуществления, второй Z-сканер 450 сконфигурирован для изменения числовой апертуры лазерного луча более чем на 25%.
На фиг. 10 показана сводная таблица многих вариантов описанных выше элементов. Как показано, некоторые исполнения могут иметь 0 сканеров глубины Z, 1 сканер глубины Z перед XY- сканером 300, 1 сканер глубины Z после XY-сканера 300 и 2 сканера глубины Z, один перед, а один после XY-сканера 300.
Кроме того, некоторые исполнения могут иметь 0 контроллеров NA, 1 контроллер NA перед XY-сканером 300, 1 контроллер NA после XY-сканера 300 и 2 контроллера NA, один перед и один после XY-сканера 300.
Здесь, Z-сканеры и контроллеры NA в целом относятся к одной линзе и группе линз, которые могут модифицировать соответственно глубину Z и числовую апертуру NA. В некоторых случаях, данные модификаторы могут активироваться или регулироваться одним электроприводом, который вызывает синхронное движение линз модификатора для модификации NA или глубины Z луча.
И сканирующие по направлению Z сканеры, и контроллеры NA могут быть размещены в первом Z-сканнере 250 и втором Z-сканере 450, которые показаны на фиг. 9. В некоторых случаях, соответствующие оптические элементы являются отдельными компонентами, в других исполнениях, Z-сканер и контроллер NA, которые помещены в один и тот же блок Z-сканера 250 или 450, могут разделять одну или более общих линз, подвижных линз или электроприводов.
Как показано на фиг. 10, 0 Z-сканеров и один или два контроллера NA работают на фиксированной глубине Z, но могут регулировать NA во время сканирования по направлениям XY.
1 Z-сканер и 0 контроллеров NA могут выполнять сканирование по направлению Z.
1 Z-сканер и 1 или 2 контроллера NA, в дополнение к сканированию по направлению Z, могут выполнять регулировку NA.
2 Z-сканера могут выполнять сканирование по направлению Z с двумя скоростями, а также регулировать NA при объединении с 1 или 2 контроллерами NA.
Не линзовые оптические элементы также используются в некоторых исполнениях, таких как вариабельные апертуры и зрачки.
Кроме того, большинство из 16 иллюстрируемых комбинаций могут быть, кроме того, сконфигурированы для прекомпенсации выбранной аберрации, такой как сферическая аберрация.
Фиг. 10 иллюстрирует, что различные характеристики системы, такие как глубина Z луча, его числовая апертура NA и его аберрация, представленная критерием его аберрации, таким как число Штреля S, может регулироваться или подбираться независимо друг от друга. Такие варианты осуществления обеспечивают оператору системы подачи лазерного луча возможность осуществления значительного контроля и высокой точности манипулирования.
В аналогичных вариантах осуществления, такое двойное кондиционирование (приведение в соответствие) лазерных лучей может выполняться для других сдваиваний характеристик излучения. Например, аналогичные таблицы с 4×4=16 сдваиваниями характеристик могут быть созданы в отношении контроллера аберраций и контроллера диаметра луча. В данном случае, 0, 1 или 2 контроллера аберраций могут сдваиваться во всех возможных комбинациях с 0, 1 или 2 контроллерами диаметра лучей.
Перечень характеристик излучения включает: глубину Z фокального пятна, числовую апертуру NA, радиус луча и любой критерий аберрации, такой как число Штреля S, радиус фокального пятна r f, ошибка RMS волнового фронта ω и критерий сферической аберрации α 40.
3. XY-сканер 300
XY-сканер 300 может принимать предварительный компенсированный луч из прекомпенсатора 200 или непосредственно, или опосредованно, после прохождения через некоторые промежуточные оптические элементы. Функция XY-сканера 300 может заключаться в сканировании луча, принятого, полученного из прекомпенсатора 200, в направлении, по существу поперечном оптической оси системы 1 доставки лазерного луча. В различных вариантах осуществления, «поперечное» направление необязательно является перпендикулярным оптической оси и может включать любое направление, которое составляет существенный угол с оптической осью.
В некоторых вариантах осуществления, XY-сканер 300 излучает сканирующий лазерный луч, который распространившись через систему 1 доставки лазерного луча и достигнув хирургической области, осуществляет сканирование в поперечном направлении от нуля до максимума диапазона сканирования по направлениям XY 5-14 мм. В некоторых исполнениях, максимум диапазона сканирования по направлениям XY составляет от 8 до 12 мм.
Фиг. 11A иллюстрирует, что сканирующий по направлениям XY-сканер 300 может включать X-сканер, сканирующий по направлению X и Y-сканер, сканирующий по направлению Y сканер. В некоторых существующих конструкциях, каждый из сканеров, сканирующего по направлению X, и сканера, сканирующего по направлению Y, включает одно зеркало: одно зеркало 310, используемое для сканирования по направлению X, и одно зеркало 320, используемое для сканирования по направлению Y. В таких конструкциях, луч, отклоненный зеркалом 310, используемым для сканирования по направлению X, падает на зеркало 320, используемое для сканирования по направлению Y, в различных точках, в зависимости от ориентации зеркала 310, используемого для сканирования по направлению X. В частности, когда зеркало 310, используемое для сканирования по направлению X, находится в положении 310a, падающий луч 331 отражается в виде луча 332a, в то время как когда зеркало, используемое для сканирования по направлению X, поворачивается в положение 310b, падающий луч отражается в виде луча 332b.
Указанные два луча 332a и 332b попадают на зеркало 320, используемое для сканирования по направлению Y, в различных положениях, и поэтому, даже для фиксированного зеркала 320, используемого для сканирования по направлению Y, в положении 320a, они вызовут появление двух различных отраженных лучей, соответственно, 333aa и 333ba. Еще хуже, когда само зеркало 320, используемое для сканирования по направлению Y, поворачивается из положения 320a в положение 320b, то два падающих луча 332a и 332b вызывают появление двух дополнительных отраженных лучей 333ab и 333bb, причем все четыре луча 333aa, 333ab, 333ba и 333bb распространяются в различных направлениях.
Эта проблема может характеризоваться с точки зрения точки вращения. Одно определение точки поворота сканирующего оптического элемента может представлять собой точку, через которую проходят по существу все лучи, вышедшие из оптического сканирующего элемента. Данное понятие является аналогом фокальной точки неподвижных рефрактивных элементов, применяемых для перемещения оптических элементов, таких как сканеры.
Используя данную терминологию, указанную выше проблему можно проследить на фиг. 11A до точки 315X вращения, фиксированной на самом зеркале 310, используемом для сканирования по направлению X. Испускаемый сканированный луч предстанет перед последующими оптическими элементами как исходящий от одной точки 315X поворота на зеркале 310, используемом для сканирования по направлению X, и, таким образом, распространяющийся по широкому диапазону углов. Данное расхождение конструкции двух зеркал может привести к нескольким различным типам нежелательных аберраций.
Фиг. 11B иллюстрирует существующий трехзеркальный XY-сканер 300', где X-сканер 310, сканирующий по направлению X, включает два зеркала 311 и 312 для решения данной проблемы. Для ясности, зеркала показаны сбоку. В данной конструкции, зеркала 311 и 312, используемые для сканирования по направлению X, выполняют функцию сканирования по направлению X координированным образом. Как показано на фиг. 11B, по мере того как первое зеркало 311, используемое для сканирования по направлению X, изменяет свою ориентацию с положения 311a в положение 311b, второе зеркало 312, используемое для сканирования по направлению X, может поворачиваться координированным образом из положения 312a в положение 312b. Данные координированные сканирующие вращения обеспечивают возможность того, чтобы отклоненные лучи 332a и 332b в двух состояниях вращения проходили через точку 315X поворота, которая приподнята над зеркалами, используемыми для сканирования по направлению X.
Поскольку точка 315X вращения сканера, сканирующего по направлению X, была поднята от самого зеркала, используемого для сканирования по направлению X, то ее локализация может регулироваться. В конструкции, показанной на фиг. 11B, зеркала, используемые для сканирования по направлению X, предназначены для размещения точки 315X вращения по существу на зеркале 320, используемом для сканирования по направлению Y. В таких конструкциях, проблема, связанная со сканером, сканирующим по направлению X, показанным на фиг. 11A, по существу разрешается, и соответствующие аберрации значительно уменьшаются.
Однако даже данная конструкция связана с проблемой, аналогичной проблеме, иллюстрируемой на фиг. 11А, только в контексте зеркала 320, используемого для сканирования по направлению Y. В конструкции, показанной на фиг. 11B, точка вращения 315Y сканера, сканирующего по направлению Y, еще фиксирована к зеркалу, используемому для сканирования по направлению Y.
Входной зрачок оптической системы представляет собой изображение апертурной диафрагмы при просмотре спереди указанной системы. Входной зрачок представляет собой изображение апертурной диафрагмы в пространстве изображения. В оптической системе с множественными группами линз положения входных и выходных зрачков часто внимательно настраиваются. Во многих конструкциях, выходной зрачок одной группы линз совпадает с входным зрачком следующей группы линз.
Для XY-сканера 310, сканирующего по направлениям XY, точка вращения может рассматриваться как выходной зрачок. В некоторых вариантах осуществления, данный выходной зрачок совпадает с входным зрачком следующей группы линз, такой как Z-сканер 450, сканирующий по направлению Z. Однако входной зрачок указанной группы линз может находиться внутри физических границ группы линз, где не может быть помещен блок сканера. В этом случае желателен блок сканера, для которого точка вращения находится вне физических границ блока сканера, в положении, которое может быть произвольно выбрано.
Фиг. 11C иллюстрирует четырехзеркальную конструкцию для решения указанной проблемы. В XY-сканере 300", X-сканер 310 снова включает два зеркала 311 и 312, используемые для сканирования по направлению X. Однако Y-сканер также включает два зеркала 321 и 322, используемых для сканирования по направлению Y.
XY-сканер 300" удаляет точку 315Y вращения Y-сканера от зеркала, используемого для сканирования по направлению Y. Соответственно, сканирующий по направлениям XY-сканер 300" может регулировать Y-сканер, или выходной луч, перемещая точку 315Y вращения в заданное положение. Примером является перемещение точки 315Y вращения выходного луча сканирования по направлению Y на входной зрачок 340 последующей группы линз. В некоторых исполнениях, точка 315X вращения также может смещаться в то же положение.
Другие аспекты данной конструкции включают то, что XY-сканер 300" может по существу независимо регулировать (i) угол α между выходящим сканированным лучом и оптической осью системы 1 доставки лазерного луча, и (ii) местоположение, где сканирующий луч падает на входной зрачок последующего оптического элемента, характеризуемый расстоянием d от оптической оси. Ввиду приблизительной независимости указанных регулировок, XY-сканер 300" может обеспечить получение сканирующего луча с минимизированными аберрациями, а также может регулировать астигматизм и кому в периферических областях, включая периферические области участка хирургического вмешательства.
Некоторые исполнения XY-сканера 300''' включают только одно зеркало 310, используемое для сканирования по направлению X и одно зеркало 320, используемое для сканирования по направлению Y, каждое из которых относится к типу «быстрого наведения». Отдельное зеркало быстрого наведения способно к угловому перемещению по двум осям вращения. Пара указанных зеркал быстрого наведения может также регулировать угол луча и положение луча в плоскости, поперечной оптической оси.
В некоторых исполнениях, XY-сканер 300''' сконфигурирован для сканирования лазерного луча по диапазону сканирования XY, максимум которого длиннее чем 5 мм и короче чем 15 мм в фокальной плоскости лазерной системы.
В некоторых исполнениях, точка X вращения, генерируемая первым и вторым быстро наводимыми зеркалами, используемыми при сканировании по направлениям XY, и точка Y вращения, генерируемая первым и вторым быстро наводимыми зеркалами, используемыми при сканировании по направлениям XY, совпадают.
4. Z-сканер 450
Как описано выше, офтальмологические хирургические системы сконфигурированы для выполнения операций на переднем сегменте или операций на хрусталике, имея конструкцию, позволяющую сканирование фокальной точки по интервалу, гораздо большему, чем сканируемый интервал при роговичных процедурах. В некоторых исполнениях сканирование по направлению Z выполняется по траектории сканирования по направлению Z в пределах диапазона сканирования по направлению Z от 5 мм до 10 мм, или от 0 мм до 15 мм. (По всей настоящей заявке, термин «сканирование в пределах диапазона от x мм до y мм» относится к траектории сканирования, первоначальная величина которой составляет x мм или более, а конечная величина составляет y мм или менее, охватывая все траектории сканирования, которые не простираются по всему диапазону сканирования).
Следует напомнить, что обозначения «X, Y, Z» во всех исполнениях указываются в широком смысле. Z обычно обозначает оптическую ось, которая может находиться близко к геометрической оси. Но направление Z внутри целевой ткани, такой как глаз, может быть не полностью параллельно оптической оси системы 1 доставки лазерного луча. Любая компромиссная ось между указанными двумя осями может относиться к направлению Z. Также, направления X, Y необязательно перпендикулярны оси Z. Они могут относиться к любому направлению, составляющему значительный угол с направлением Z. Также, в некоторых исполнениях, радиальная система координат может больше подходить для описания сканирования системы подачи лазерного луча 1. В указанных исполнениях, сканирование по направлениям XY относится к любому сканированию, не параллельному оси Z, параметризируемому подходящими радиальными координатами.
Фиг. 1 иллюстрирует, что некоторые исполнения системы 1 доставки лазерного луча достигают указанных проблематичных больших диапазонов сканирования по направлению Z путем включения блока первого расширителя луча 400 и блока подвижного расширителя луча 500 в Z-сканер 450. В различных исполнениях, блок первого расширителя луча 400 может представлять собой подвижный блок или фиксированный блок. Расстояние между блоком первого расширителя луча 400 и блоком подвижного расширителя луча 500 может регулироваться, например, приводом положения.
Как уже иллюстрировалось на фиг. 2A-B, по мере того как фокальная точка отодвигается от ее оптимального положения в целевой ткани, аберрации увеличиваются. Данные аберрации обычно называются «геометрическими аберрациями», поскольку их можно рассматривать в результате прослеживания геометрических лучей, и они происходят из конечной степени рефракции линз. Данные геометрические аберрации могут быть ограничены уменьшением числовой апертуры Z-сканера 450. В сущности, геометрические аберрации зависят и от фокальной глубины Z, и числовой апертуры NA.
Кроме того, с уменьшением числовой апертуры NA, второй источник аберраций возникает из волновой природы света. Данные аберрации вызывают появление так называемой «дифракционной аберрации». Второй тип аберрации увеличивает радиус фокального пятна с уменьшением числовой апертуры.
Фиг. 12A-B иллюстрируют геометрические и дифракционные аберрации в переднем сегменте глаза как функцию размера апертуры Z-сканера 450, характеризуемого одним из описанных выше критериев аберрации: радиусом фокального пятна r f. Поскольку геометрическая аберрация увеличивается с увеличением размера апертуры, в то время как дифракционная аберрация уменьшается, общая аберрация, определяемая как сумма указанных двух аберраций, проявляет оптимальную минимальную величину для оптимальной аберрации и соответствующую оптимальную числовую аберрацию NA opt.
В данном случае, обычное определение связывает числовую апертуру NA и размер апертуры: NA=n*Sin ArTan (aperture size/ (2* focal length)), где n представляет показатель преломления материала, в котором формируется изображение.
Данные кривые построены для определенных фокальных глубин Z, фокальной глубины Z 1 мм на фиг. 12A и фокальной глубины Z 8 мм на фиг. 12B. Поскольку геометрическая аберрация различная при различных фокальных глубинах Z, минимум общей аберрации и, таким образом, оптимальный размер апертуры и оптимальная числовая апертура NA opt всей системы зависят от фокальной глубины Z: NA op t=NA opt (z). В частности, оптимальный размер апертуры и NA opt уменьшается для увеличения фокальной глубины Z, от 32 мм до 25 мм в данном определенном случае по мере увеличения фокальной глубины Z с 1 мм до 8 мм. Поэтому, системы доставки лазерного луча, которые предназначены для использования при хирургических вмешательствах и на роговице, и на хрусталике, должны охватывать более широкий диапазон апертур и соответствующие диапазоны NA. Данное требование создает значительные проблемы для конструирования.
Как далее обсуждается ниже, фиг. 12 A-B также иллюстрируют, что аберрация проявляет широкий плоский оптимум для типичных роговичных фокальных глубин Z 1 мм, в то время как она проявляет более узкий, более острый минимум для фокальных глубин Z, типичных для операций на хрусталике.
Аберрация может также характеризоваться другими тремя критериями аберрации S, ω или также α 40, которые все дают кривые, проявляющие оптимум. Любой из указанных выше четырех критериев аберрации может соответствовать любой из контрольных точек P(1), …, P(5), описанных выше, или может представлять собой среднюю величину, полученную по некоторым или всем из указанных контрольных точек, или может соответствовать другим контрольным точкам.
В некоторых исполнениях, в широком диапазоне фокальных глубин Z, размер апертуры и соответствующая NA могут доводиться до по существу оптимальной числовой апертуры NA opt (z), минимизируя общую аберрацию, измеренную критерием аберрации. Данная функциональность обеспечивает возможность значительного уменьшения общей аберрации. В данном случае, как указывалось ранее, аберрации могут быть измерены одним из четырех критериев аберрации r f , S, ω или α 40, в любой из указанных выше пяти контрольных точек P1, …, P5. Оптимальная аберрация соответствует минимуму критериев аберрации r f , ω или α 40, или максимуму числа Штреля S.
В некоторых других исполнениях, где оптимальная аберрация может не быть достигнута или соображения конструкции диктуют, что следует использовать аберрацию, отличающуюся от оптимальной величины, блок подвижного расширителя луча 500 может еще уменьшить величины критериев аберрации r f , ω или α 40, по меньшей мере, на процентную долю P(MovableExpander), или соответственно увеличить величину числа Штреля S, по меньшей мере, на процентную долю P(MovableExpander), по сравнению с критериями аберрации по существу идентичной лазерной системы, где второй блок Z-сканера 450 не является подвижным и, таким образом, числовая апертура является не регулируемой. В некоторых исполнениях, P(MovableExpander) может составлять 20%, 30%, 40% или 50%. В данном случае, как и ранее, критерии аберрации r f , S, ω или α 40, могут быть измерены в любой из пяти контрольных точек P1, …, P5.
В некоторых исполнениях, лазерные системы, имеющие Z-сканер 450 с регулируемой числовой апертурой NA, могут увеличить число Штреля S выше 0,8 относительно по существу идентичных лазерных систем, где Z-сканер не имеет регулируемой числовой апертуры, имеющей число Штреля S ниже 0,8.
Дополнительная проблема конструкции состоит не только в минимизации общей аберрации на фиксированной фокальной глубине Z регулированием системы доставки лазерного луча до ее оптимального размера апертуры и соответствующей числовой апертуры NA opt (z), но также в сохранении системы, по меньшей мере, близко к зависимой от направления Z оптимальной числовой апертуре NA opt (z), при сканировании фокальной глубины Z. В типичном исполнении, оптимальная числовая апертура уменьшается по мере увеличения фокальной глубины.
Для решения проблемы данного изменения оптимальной апертуры при сканировании фокальной глубины Z в пределах диапазона сканирования Z, исполнения системы 1 доставки лазерного луча обладают способностью изменения числовой апертуры NA(z) в качестве отдельного параметра Z-сканера 450, по существу независимо от самой изменяемой фокальной глубины Z.
Исполнения, где два количества регулируются по существу независимо, как в настоящем случае фокальная глубина Z и числовая апертура NA, типично имеют пару контрольных параметров для достижения данной модальности. Примеры включают сдваивание регулируемого расстояния между блоком первого расширителя луча 400 и блоком подвижного расширителя луча 500 и положения подвижной линзы в любом из указанных блоков, которое может регулироваться вторым оптическим контроллером. Другой пример включает две подвижные линзы в любой комбинации в двух блоках Z-сканера 450. Следует напомнить, что блок первого расширителя луча 400 может быть выполнен в виде фиксированного блока или подвижного блока.
В некоторых исполнениях, числовая апертура NA может доводиться до последовательности оптимальных величин числовой апертуры NA opt (z), обеспечивая последовательность оптимальных величин общей аберрации при последовательности фокальной глубины Z по мере сканирования фокальной глубины Z.
Как ранее, оптимальная общая аберрация может быть получена минимумом любых из указанных выше критериев аберрации r f , ω или α 40, или максимумом числа Штреля S. Диапазоны сканирования по направлению Z могут составлять, например, 5-10 мм или 0-15 мм. Фокальная глубина Z может сканироваться при радиусе r1=0 мм, или r2=3 мм или при некотором другом радиусе r, или при вариабельном радиусе r(z), ограниченном, например, r<3 мм.
Таблица 7 иллюстрирует пример, где во второй колонке описывается сканирование фокальной глубины Z в пределах диапазона сканирования Z (-0,14 мм, 11,65 мм) в глазной целевой ткани, а в третьей колонке показаны соответствующие величины NA opt (z). Исполнения Z-сканера 450 способны к регулированию фокальной глубины Z в данном диапазоне и к доведению числовой апертуры NA до ее оптимальной величины NA opt (z) на данных фокальных глубинах.
В некоторых других вариантах осуществления, фокальная глубина Z может сканироваться в пределах диапазона сканирования по направлению Z от 0 мм до 10 мм. В ходе сканирования числовая апертура может варьироваться в пределах диапазона от 0,4 до 0,1, в некоторых вариантах осуществления, от 0,35 до 0,15.
Фиг. 12C иллюстрирует аналогичную последовательность кривых аберрации, соответствующую последовательности фокальных глубин Z, составляющих 8 мм, 4 мм, 2 мм и 0 мм, проявляя последовательность соответствующих оптимальных числовых апертур N opt (z).
Фиг. 12D ясно иллюстрирует оптимальные числовые апертуры N opt (z) как функцию соответствующих фокальных глубин Z.
Как обсуждалось выше, возможность отдельного регулирования фокальной глубины Z и числовой апертуры NA обычно требует двух независимо регулируемых контрольных параметров. Однако некоторые исполнения могут не предоставить возможность независимой доводки Z и NA. Вместо этого, для каждой фокальной глубины Z в данных исполнениях происходит автоматическая доводка числовой апертуры или до ее оптимальной величины NA opt (z), или, по меньшей мере, до величины, близкой к NA opt (z), без отдельной стадии регулировки NA оператором. Например, NA может прослеживать NA opt (z) в пределах процентной доли P(track), где P(track) может составлять 10%, 20% или 30%.
В данных исполнениях может использоваться только один, интегрированный настраиваемый контроллер. В только что описанном примере, данный интегрированный контроллер может только представлять на дисплее пользователю системы информацию о том, что он регулирует фокальную глубину Z в целевой области. Однако контроллер может содержать соединенный регулятор апертуры, который одновременно регулирует числовую апертуру NA для прослеживания NA opt (z) без отдельной стадии настройки, выполняемой пользователем системы 1 доставки лазерного луча.
В некоторых исполнениях, данную функцию может адекватно выполнять регулировка расстояния между первым расширителем луча 400 и подвижным расширителем луча 500. В других исполнениях, данную модальность может обеспечивать одна подвижная линза. В еще одних вариантах осуществления, может использоваться комбинация двух регуляторов.
Данные исполнения обеспечивают оператору упрощенную функцию регулирования системы 1 доставки лазерного луча. Поскольку достижение такой одной, интегрированной функции регулирования представляет собой проблему для конструирования, в некоторых исполнениях данные интегрированные функции регулирования выполняются в комбинации с другими блоками, такими как прекомпенсатор 200, XY-сканер 300 и объектив 700.
В некоторых исполнениях, оптимальные величины общей аберрации не могут быть достигнуты или не достигнуты ввиду различных конструктивных соображений, числовая апертура NA может доводиться до последовательности величин числовой апертуры при последовательности фокальных глубин Z вдоль канала сканирования по направлению Z в пределах диапазона сканирования по направлению Z для уменьшения общей аберрации, по меньшей мере, на процентную долю P(scan) относительно лазерных систем Z-сканеры 450 которых, не имеют регулируемую числовую апертуру NA. В некоторых исполнениях, P(scan) может составлять 20, 30, 40 или 50%.
Как и ранее, общая аберрация может характеризоваться любым из ранее введенных критериев аберрации r f , ω или α 40. Эквивалентно, снижение аберрации может характеризоваться соответствующим увеличением числа Штреля S. Траектория сканирования по направлению Z может представлять собой траекторию, параллельную оси Z при радиусе R от оптической оси или оси Z лазерной системы. В некоторых исполнениях траектория сканирования по направлению Z может располагаться между радиусами r1=0 мм и r2=3 мм от оптической оси Z.
Общая аберрация может измеряться несколькими различными путями. Общая аберрация может относиться к общей аберрации, усредненной по траектории сканирования по направлению Z, или к максимальной или минимальной величине общей аберрации вдоль траектории сканирования. Снижение общей аберрации может относиться к любой из указанных возможностей.
В некоторых исполнениях, числовая апертура NA может доводиться от первой величины, когда выполняется роговичная процедура, до второй величины, когда выполняется процедура на переднем сегменте. В некоторых исполнениях, первая величина находится в диапазоне 0,2-0,5, а вторая величина находится в диапазоне 0,1-0,3. В некоторых других исполнениях, первая величина может находиться в диапазоне 0,25-0,35, а вторая величина может находиться в диапазоне 0,15-0,25.
Настоящее исполнение Z-сканера 450 отличается от существующих систем доставки лазерного луча для роговичных процедур несколькими другими путями, включая следующие.
1. В системах доставки лазерного луча для роговичных процедур обычно требуется, чтобы числовая апертура не изменялась во время сканирования по направлению Z фокальной глубины для обеспечения простоты конструкции. Данная конструкция удовлетворительна для хирургических вмешательств на роговице, поскольку общая аберрация, вызванная типичным сканированием по направлению Z на 1 мм, не является серьезным ограничивающим фактором точности систем доставки лазерного луча для роговичных процедур. Напротив, исполнения системы 1 доставки лазерного луча имеют вариабельную числовую апертуру NA для постоянной доводки апертуры до ее оптимальной величины по протяженному хирургическому интервалу Z, составляющему, например, 5-10 мм. Это, конечно, достигается модальностью числовой апертуры NA, регулируемой по существу независимо от фокальной глубины Z.
2. Также, типичные существующие роговичные системы имеют Z- сканер в объективе 700, или в виде части комплексного исполнения объектива 700, в то время как настоящий Z-сканер 450 расположен перед объективом 700. В данном случае, объектив 700 обозначает конечную группу линз системы 1 доставки лазерного луча, которая расположена в функциональном корпусе, отделенном от функционального механического корпуса XY-сканера и Z-сканера. Термин «функциональный механический корпус» относится не к общему корпусу системы доставки, конструкция которого может определяться эргономическими или эстетическими соображениями, но к корпусу, который вмещает вместе линзы для выполнения их действительной оптической функции. Объектив 700 настоящих исполнений обычно располагается в оптическом канале после сканирующего по направлениям XYZ луча, испускаемого Z-сканером 450, и отражаемого зеркалом 600.
3. Фиг. 12A-B иллюстрируют еще одну проблему при конструировании оптических линзовых систем для хирургии хрусталика. Визуально, общая аберрация проявляет широкую, плоскую оптимальную область для типичных роговичных фокальных глубин Z, составляющих 1 мм, следовательно, (i) параметры системы могут быть оптимизированы по другим соображениям, (ii) может использоваться широкий диапазон сканирования по направлению Z, и (iii) требуется менее прецизионная настройка параметров системы, и все это без большого нарушения размера фокального пятна. Напротив, для систем хирургии хрусталика, размер фокального пятна быстро нарушается, когда (i) параметры системы оптимизируются по другим соображениям, (ii) исполняется более широкий диапазон сканирования по направлению Z и (iii) параметры системы настраиваются менее точно.
В еще одном аспекте вариантов осуществления Z-сканера 450, следует напомнить, что системы доставки лазерного луча, которые включают подсистему визуализации или подсистему оптики визуального наблюдения, имеют лучи, связанные с любой из указанных подсистем, соединенных в систему 1 доставки лазерного луча посредством зеркала 600. Зеркало 600 может представлять собой, например, дихроичное зеркало. В типичных хирургических системах, объектив 700 относится к группе линз, которая располагается после зеркала 600 в оптическом канале.
Исполнение Z-сканера 450 перед зеркалом 600 и отдельно от объектива 700 представляет собой важное конструктивное соображение также потому, что вес объектива 700 представляет собой решающий фактор, поскольку объектив 700 осуществляет по существу непосредственный контакт с целевой тканью, такой как глаз пациента. Поэтому, минимизация веса или массы объектива 700 обеспечивает оказание сниженного давления на глаз системы 1 доставки лазерного луча в различных исполнениях. И поскольку это давление деформирует сам глаз и, таким образом, уменьшает точность хирургической процедуры, конструкции, которые снижают давление на глаз, значительно увеличивают точность офтальмологических хирургических вмешательств.
Таблицы 8-9 иллюстрируют диапазоны некоторых релевантных параметров для различных вариантов осуществления блока первого расширителя луча 400 и блока подвижного расширителя луча 500. Каждый из блоков расширителей луча может иметь от 2 до 10 линз, в некоторых вариантах осуществления, от 3 до 5 линз, которые сконфигурированы для осуществления указанных выше функций.
Таблица 8 иллюстрирует пятилинзовый вариант осуществления блока первого расширителя луча 400 с использованием конвенции промышленного стандарта, описывающего группы толстых линз с точки зрения отдельных поверхностей. Блок первого расширителя луча 400 может включать линзы 411, 412, 413, 414 и 415 с параметрами в следующих диапазонах (указанных в скобках):
В некоторых вариантах осуществления, блок первого расширителя луча 400 включает, последовательно от стороны впуска, обращенной к XY-сканеру 300: первую группу линз с положительной силой рефракции, менисковую линзу, имеющую выпуклую поверхность, обращенную к стороне впуска, и вторую линзу, имеющую вогнутую поверхность, обращенную к стороне впуска.
Другие исполнения относятся к исполнениям, представленным в таблице 8, коэффициентом масштабирования α, имеющим пять масштабированных линз, причем величины кривизны во второй колонке умножены на α, величины расстояний в третьей колонке умножены на 1/α и имеют неизмененные показатели преломления n. Коэффициент масштабирования α может иметь величины в диапазоне от 0,3 до 3.
Таблица 9 иллюстрирует четырехлинзовый вариант исполнения блока подвижного расширителя луча 500, включающего линзы 511, 512, 513 и 514, с параметрами в следующих диапазонах:
Некоторые исполнения блока подвижного расширителя луча 500 включают, последовательно от стороны впуска, обращенной к блоку первого расширителя луча 400: менисковую линзу, имеющую выпуклую поверхность, обращенную к стороне впуска, отрицательную линзу с отрицательной силой рефракции, и группу положительных линз с положительной силой рефракции.
Другие исполнения связаны с исполнениями, представленными в таблице 9 коэффициентом масштабирования α, имеющим четыре масштабированных линзы, имеющие величины кривизны, представленные во второй колонке, умноженные на α, величины расстояний в третьей колонке умноженные на 1/α и имеющие неизмененные показатели преломления n. Коэффициент масштабирования α может иметь величины в диапазоне от 0,3 до 3.
Фиг. 13A-B иллюстрируют варианты осуществления, представленные в таблицах 8-9, в двух конфигурациях с различными расстояниями между блоком первого расширителя луча 400 и блоком подвижного расширителя луча 500. В некоторых исполнениях, блок подвижного расширителя луча 500 может перемещаться относительно блока первого расширителя луча 400 на расстояние в диапазоне d=5-50 мм.
Данные чертежи иллюстрируют конструктивные соображения, относящиеся к Z-сканеру 450 при работе.
Фиг. 13A иллюстрирует случай, когда блок подвижного расширителя луча 500 находится в положении, относительно удаленном от блока первого расширителя луча 400. В данном случае, луч, выходящий из комбинированной компоновки, имеет (i) сходящиеся лучи, (ii) относительно большой диаметр у выходного зрачка ExP, (iii) более мелкую глубину Z фокального пятна, когда объектив с фиксированной длиной фокуса помещается около выходного зрачка Z-сканера 450, и, таким образом, (iv) фокальное пятно образуется пучком лучей с более высокой числовой апертурой NA.
Фиг. 13B иллюстрирует случай, когда блок подвижного расширителя луча 500 находится ближе к блоку первого расширителя луча 400, чем в случае согласно фиг. 13A. В данном случае, пучок имеет (i) расходящиеся лучи, (ii) меньший диаметр у выходного зрачка ExP, (iii) большую глубину Z фокального пятна, когда объектив с фиксированной длиной фокуса помещается в выходной зрачок Z-сканера 450, и, таким образом, (iv) фокальное пятно образуется пучком лучей с меньшей числовой апертурой NA.
В итоге, при более мелких глубинах Z, фокальное пятно создается пучком лучей с большой NA, тогда как для увеличивающихся фокальных глубин Z, числовая апертура NA уменьшается. Относительное изменение числовой апертуры NA может оптимизироваться оптимизацией положения выходного зрачка ExP блоков расширителей луча 400 и 500 и положения выходного зрачка фокусирующего объектива 700. Данные исполнения представляют собой альтернативные пути оптимизации числовой апертуры на различных фокальных глубинах, даже без использования функций прекомпенсатора 200.
Как обсуждалось выше, числовая апертура NA может широко регулироваться прекомпенсатором 200 или без него. Во всей системе 1 доставки лазерного луча, числовая апертура NA может доводиться регулированием прекомпенсатора 200, блока первого расширителя луча 400 или блока подвижного расширителя луча 500, или регулированием указанных блоков в комбинации. Действительный выбор исполнения на практике зависит от других требований к системе более высокого уровня, таких как диапазон сканирования, скорость сканирования и сложность. Исполнения с другими числовыми диапазонами могут быть также сконфигурированы для выполнения некоторых или всех из описанных выше функций.
Фиг. 14 иллюстрирует еще один аспект Z-сканера 450. Показаны три различных характерных луча, исходящих из выходной точки PP(XY) вращения XY-сканера 300. Примечательно, что все три характерных луча фокусируются во входную точку PP(O) вращения объектива 700 Z-сканером 450. Положение PP(O) может регулироваться, например, перемещением подвижного расширителя луча 500.
Как обсуждается ниже, системы доставки лазерного луча, которые генерируют точку PP(O) вращения, расположенную вне зеркал XY-сканера 300, имеют полезные признаки, например, в вариантах осуществления, где точка PP(O) вращения попадает внутрь объектива 700.
В других вариантах осуществления XY-сканер 300 имеет выходную точку PP(XY)вращения, расположенную дальше, чем расстояние до Z-сканера 450. В этих вариантах осуществления, только Z-сканер 450 модифицирует выходную точку PP(XY) вращения XY-сканера 300 во входную точку PP(O) вращения объектива 700.
В любом случае, в данных исполнениях используется наличие промежуточной фокальной плоскости 451, расположенной между блоком первого расширителя луча 400 и блоком подвижного расширителя луча 500. На наличие данной промежуточной фокальной плоскости 451 указывают фокальные точки трех характерных лучей, располагающихся по одной оси латерально по существу с одинаковой координатой z. Наоборот, исполнения, которые не имеют такой промежуточной фокальной плоскости недостаточно подходят для наличия у них регулируемой точки PP(O)вращения.
5. Объектив 700
В некоторых исполнениях, лазерный луч, выходящий из Z-сканера 450, отклоняется разделителем луча/дихроичным зеркалом 600 к объективу 700. Посредством данного зеркала 600, различные вспомогательные световые лучи могут также объединяться в систему 1 доставки. Вспомогательные источники света могут включать свет, связанный с системой оптической когерентной томографии (OCT), системой освещения и блоком визуального наблюдения.
Объектив 700 может обеспечить общий оптический канал для сканируемого по направлениям XYZ лазерного луча, распространяющегося из лазерного устройства 100 через XY-сканер 300 и Z-сканер 450, и вспомогательного света в целевую область хирургического вмешательства. В различных исполнениях, объектив 700 может включать группы линз объектива. В нескольких исполнениях, линзы группы линз объектива не перемещаются относительно друг друга. В сущности, хотя объектив 700 представляет собой неотъемлемую часть функции сканирования по направлению Z, он не оказывает вариабельного или динамического влияния на сканирование по направлению Z. В данных исполнениях, не осуществляется регулирование положения линз в объективе 700 для перемещения фокальной глубины Z фокального пятна.
Исполнения объектива 700 могут контролировать, по меньшей мере, одну из сферической аберрации, комы и аберраций высшего порядка импульсного лазерного луча для хирургических целей.
Поскольку объектив 700 направляет световые пучки различной длины волн, в исполнениях объектива 700 используются группы ахроматизированных линз. Длина волн вспомогательного света может находиться, например, в диапазоне от 0,4 мкм до 0,9 мкм, а длина волн хирургического света (света для хирургических целей) может находиться в диапазоне от 1,0 до 1,1 мкм. Исполнения объектива 700 поддерживают хроматические аберрации ниже заданной величины по всему диапазону длин волн использованных видов света, таких как от 0,4 мкм до 1,1 мкм в приведенном выше примере.
Вес или масса объектива 700 представляет собой важный аспект. В некоторых исполнениях, объектив находится в механическом контакте с глазом пациента. В сущности, он оказывает давление на глаз. Данное давление может изменять форму глаза относительно его расслабленной конфигурации, затрудняя выбор мишеней и точное направление луча хирургического лазера.
Кроме того, если пациент движется во время хирургической процедуры, то может быть предпочтительно, чтобы объектив мог передвигаться с наименьшим сопротивлением в ответ на движение пациента. Хотя вес объектива может быть статически уравновешен пружинным устройством или противовесом, эти меры могут не уменьшить динамические или инерционные силы. В действительности, эти силы могут увеличиваться такими мерами. Все из указанных соображений указывают на полезность снижения веса или массы объектива 700.
Имеются многочисленные пути идентификации критических сил и соответствующих масс объектива в связи с офтальмологическими хирургическими процедурами. Обзор различных воздействий на глаз был опубликован, например, в статье Determination of Significant Parameters for Eye Injury Risk from Projectiles; Duma SM, Ng TP, Kennedy EA, Stitzel JD, Herring IP, Kuhn F. J Trauma. 2005 Oct; 59 (4):960-4. В данной статье дан обзор объектов, воздействующих на глаз, и представлены критические значения энергии воздействующих объектов, соответствующие (i) различным типам повреждения глаза, включая небольшие травмы, подобные абразиям роговицы, умеренные травмы, подобные смещениям хрусталика, и тяжелые травмы, подобные повреждению сетчатки. В статье также указана вероятность травмы от (ii) низкой, представляющей возможность, составляющую несколько процентов, до средней, представляющей возможность примерно 50%, о высокой, относящейся почти к несомненной возможности травмы. В статье, кроме того, классифицируются (iii) сценарии воздействия в соответствии с формой воздействующего объекта с делением на категории в соответствии с общей воздействующей энергией и воздействующей энергией, нормализованной областью воздействия.
Данные результаты могут применяться к определенному случаю хирургии глаза путем исследования, возможно, самого сильного повреждения в результате воздействия, вызванного полным разрушением системы механической поддержки объектива 700. Такое разрушение может привести к свободному падению всего объектива 700 по типичному вертикальному каналу 20-25 мм, перенося всю энергию объектива на сам глаз. Критические массы могут быть рассчитаны по опубликованным критическим значениям энергии, моделирующим свободное падение объектива, в соответствии с известными физическими принципами.
Вертикальный канал данной длины может появиться в результате следующих принципов конструирования. Объектив 700 может быть установлен на вертикальном штативе со скольжением для обеспечения безопасной и надежной стыковки системы 1 доставки лазерного луча посредством портала к глазу. Такие конструкции ослабляют требования точности и силы, предъявляемые к порталу, потому что вертикальный портал вмещает объектив 700, подлежащий размещению в пределах диапазона вертикального перемещения. Кроме того, после стыковки с глазом, данные конструкции обеспечивают возможность движения глаза вертикально относительно источника 100 лазерного излучения (лазерное устройство) без нарушения фиксации глаза к системе 1 доставки лазерного луча. Данные движения могут возникать вследствие движения пациента или движения функциональной кровати. Диапазон вертикального перемещения объектива 700 от 20 до 25 мм эффективно и безопасно смягчает действие сил портала и движения пациента в пределах данного диапазона.
Наконец, (iv) учет конструкции также влияет на критические массы в том смысле, что («оптическая») масса оптических элементов объектива 700, таких как стеклянные линзы отдельно в группах линз объектива, определяют нижнюю границу массы всего объектива, поскольку имеются многочисленные пути снижения массы корпуса и систем управления объектива, в то время как гораздо труднее снизить массу линз. В настоящих системах, общая масса объектива может в два-три раза превышать «оптическую» массу линз отдельно.
Некоторые из этих критериев дают более четкие определения критических масс, другие лишь смягчают перекрестную зависимость и непригодны для четкого определения.
Из всех возможных комбинаций приведенных выше классификаций (i)-(iv), четыре относительно четких и значимых определений критических масс MC могут быть идентифицированы следующим образом:
(1) MC1 ~ 400 грамм: объективы с массами M<MC1 по существу не представляют риска травмы для пациента даже в самом худшем случае сценария разрушения;
(2) MC2 ~ 750 грамм: массы в режиме MC1<M<MC2 могут иметь вероятность более чем 10% вызова некоторых роговичных абразий посредством общей энергии воздействия;
(3) MC3 ~ 1300-1400 грамм: массы в режиме MC2<M<MC3 могут иметь вероятность более чем 50% вызова роговичных абразий при любом сценарии воздействия; и, наконец
(4) MC4 ~ 3300 грамм: массы в диапазоне MC3<M<MC4 при некоторых сценариях воздействия могут вызвать почти определенную роговичную абразию, и могут вызывать развитие не нулевой вероятности травм средней тяжести или более тяжелых повреждений.
Конечно, все из указанных вероятностей следует умножать при маловероятном действительном возникновении полного разрушения системы механической поддержки объектива. Однако при офтальмологических применениях следует принимать крайние меры для защиты от всех мыслимых, хотя и невероятных, сценариев повреждения, делающих релевантными указанные выше критические массы.
Поэтому, приведенные выше соображения идентифицируют четыре критические массы в соответствии с четкими критериями относительно общей и оптической масс объектива 700. Соответственно, вариант осуществления объектива 700, где в процессе конструирования удается снизить массу объектива ниже любой из указанных выше критических масс MC4, …, MC1, предоставляет качественно лучшие возможности для безопасных хирургических процедур.
Существующие объективы для фемтосекундных офтальмологических лазеров имеют массу выше 5000 грамм, что значительно выше даже самой большой из указанных четырех критических масс. Исключение представляет заявка на патент США 20030053219 Manzi, в которой описывается система линз, где одна оптическая масса линз составляет примерно 1000 грамм, возможно, приводя к общей массе 2000-3000 грамм. Хотя конструкция Manzi легче, чем другие существующие объективы, она все же достаточно массивная. Это в первую очередь вызвано тем, что Z-сканер является неотъемлемой частью объектива, поскольку элементы линзы внутри объектива используются для регулирования фокуса Z. Конструкция по Manzi требует дополнительной массы для подвергнутого прецизионной станочной обработке корпуса, для прецизионной линейной направляющей для линз и для сервомотора, которые все увеличивают общую массу до величин, снова превышающих 5000 грамм.
Напротив, масса различных вариантов осуществления объектива 700 может укладываться в любой из указанных выше четырех диапазонов массы: 0-400 грамм, 400-750 грамм, 750-1350 грамм и 1350-3300 грамм. Масса может представлять собой или оптическую, или общую массу. Например, линзы в одном исполнении объектива 700 могут иметь массу меньше чем 130 грамм. Данные линзы пригодны для установки в прецизионный металлический корпус для получения общей массы конструкции в сборе 400 грамм.
Варианты осуществления объектива 700 достигают такого выраженного снижения массы до уровня ниже 400 грамм, 750 грамм, 1350 грамм и 3300 грамм путем устранения функции сканирования по направлению Z и ее переключения на отдельный Z-сканер 450, помещая его в отдельный функциональный или механический корпус. В данном описании, термин «функциональный или механический корпус» относится к тому, что общие, не функциональные аспекты конструкции могут привести к расположению отдельного Z-сканера 450 в том же общем контейнере, что и объектив 700, но такой общий контейнер не служит для исполнения оптической функции или для механической цели.
В некоторых вариантах осуществления, масса объектива 700 может быть снижена процентной долей P(mass), по сравнению с аналогичными объективами, которые выполняют, по меньшей мере, некоторую часть из функции динамического сканирования по направлению Z, путем регулирования оптической характеристики объектива 700. Такая характеристика может представлять собой весь Z-сканер 450, включенный в виде неотъемлемой части в объектив 700, или блок подвижного расширителя луча 500, включенный в виде неотъемлемой части в объектив 700, или одна или более подвижных сканирующих линз, включенных в виде неотъемлемой части в объектив 700. P(mass) может составлять 10%, 50% или 100%.
Другой связанный аспект объектива 700 и соответствующая конструкция хирургической лазерной системы 1 были описаны в связи с фиг. 14, где было показано, что варианты осуществления Z-сканера 450 могут фокусировать лазерный луч, сканированный по направлениям XYZ, на входную точку PP(O) вращения объектива. Варианты осуществления, в которых нет входной точки PP(O) вращения внутри объектива 700, имеют гораздо меньший радиус луча rb по большой части оптического канала, поскольку лучи сходятся в направлении к данной внутренней точке PP(O) вращения. В свою очередь, луч с уменьшенным радиусом rb может регулироваться меньшими линзами, что приводит к значительному снижению общей массы объектива 700.
Исполнение объектива 700 в соответствии с описанными выше существенными характеристиками конструкции, суммированы в таблице 10 и иллюстрируются на фиг. 15. Исполнения объектива 700 включают первую группу линз для приема хирургического импульсного лазерного излучения от Z-сканера 450, а вторую группу линз для приема хирургического импульсного лазерного излучения от первой группы линз и для фокусирования хирургического лазерного луча на целевую область.
В таблице 10 иллюстрируется объектив 700, более детально показанный на фиг. 15, через поверхности с 1 по 16. Объектив 700 имеет девять линз L1-L9 и контактирует с интерфейсом 800 пациента через поверхность 17. Как и ранее, в скобках указаны диапазоны, которые могут допускаться для соответствующих параметров. (Поверхности 1 и 2 ограничивают дублет линз L1/L2, а поверхности 8 и 9 ограничивают дублет линз L5/L6, следовательно, 16 поверхностей вместо 18).
В других исполнениях, может использоваться различное число линз с различными диапазонами параметров, которые сравнительно хорошо удовлетворяют указанные выше соображения, относящиеся к конструкции.
В некоторых исполнениях, объектив 700 может быть описан с точки зрения групп линз. Например, объектив 700 может включать первую группу линз для приема сканированного по направлениям XYZ лазерного луча от Z-сканера 450, и вторую группу линз для приема лазерного луча от первой группы линз. Вторая группа линз может включать первую линзу с показателем преломления в диапазоне от 1,54 до 1,72, входную поверхность с кривизной в диапазоне от 37,9 до 65 1/м и выходную поверхность с кривизной в диапазоне от -15,4 до 5,2 1/м. Кроме того, вторая группа линз может также включать вторую линзу, отделенную от первой линзы расстоянием в диапазоне от 0 до 6,5 мм, с показателем преломления в диапазоне от 1,56 до 1,85, входной поверхностью с кривизной в диапазоне от -55,1 до -21,8 1/м и выходной поверхностью с кривизной в диапазоне от 11,4 до 26,8 1/м. Объектив 700 может выводить лазерный луч на интерфейс 800 пациента через вторую линзу.
В некоторых исполнениях, эффективная фокальная длина объектива 700 составляет менее чем 70 мм.
В некоторых вариантах осуществления, расстояние от объектива 700 до интерфейса 800 пациента составляет менее чем 20 мм.
В некоторых конструкциях, кривизна фокальной плоскости системы 1 доставки лазерного луча составляет больше чем 20 1/м.
Многочисленные другие исполнения объектива 700 и всей хирургической лазерной системы 1 могут быть также созданы для соответствия принципам конструкции, раскрытым по всему описанию настоящей заявки, с использованием коммерчески доступных пакетов программного обеспечения оптической конструкции, таких как Zemax от компании Zemax Development Corporation или Code V от компании Optical Research Associates.
6. Общие оптические рабочие характеристики системы
В различных исполнениях, параметры подсистем прекомпенсатора 200, XY-сканера 300, Z-сканера 450 и объектива 700 могут быть оптимизированы взаимозависимым образом с тем, чтобы оптические рабочие характеристики всей системы 1 доставки лазерного луча могла проявлять свойства, которые крайне полезны, например, для применений в офтальмологической хирургии.
В таблицах 11A-B суммированы оптические рабочие характеристики всей системы 1 доставки лазерного луча в первом и втором исполнении с точки зрения числовой апертуры NA и числа Штреля S. Оптические рабочие характеристики снова характеризуется в контрольных точках, по аналогии с указанными выше точками Р1, …, P5. В таблицах 11A-B показана оптическая функция системы 1 доставки лазерного луча с ее компонентами в конфигурациях A, B, C и D, доставляющих лазерный луч соответственно в центр роговицы (A), на периферию роговицы (B), в центр хрусталика (C) и на периферию хрусталика (D). Данные контрольные точки представляют большой хирургический объем, связанный с проблемой выполнения офтальмологической операции на хрусталике.
В таблицах 11A-B показаны радиальные координаты контрольных точек, имеющие определенные величины. Однако в других вариантах осуществления, NA и S имеют величины, находящиеся в тех же соответствующих диапазонах «около» указанных определенных радиальных координат. В некоторых случаях, термин «около» относится к диапазону радиальных координат в пределах процентной доли P(radial) показанных величин радиальных координат, где P(radial) может составлять одну из величин 10%, 20% и 30%. Например, точки, имеющие радиальную координату z в диапазоне от 7,2 мм до 8,8 мм, находятся в пределах P(radial)=10%, близко к величине z=8,0 мм радиальной координаты контрольной точки «хрусталик, центр».
Кроме того, в некоторых вариантах осуществления, NA и S попадают только в один из их соответствующих трех диапазонов, перечисленных для конфигураций B, C и D. В некоторых других вариантах осуществления, NA и S попадают в два из их трех соответствующих диапазонов, перечисленных в конфигурациях B, C и D в таблицах 11A-B.
Видно, что описанная система доставки лазерного луча хорошо корректируется для получения оптических рабочих характеристик по существу с ограниченной дифракцией по всему объему хирургического вмешательства на хрусталике.
Аналогичные конструкции, которые имеют число Штреля S выше, чем 0,8, могут считаться эквивалентными перечисленным выше конструкциям, поскольку все указанные конструкции считаются системами с ограниченной дифракцией.
Другие критерии аберрации, такие как радиус фокального пятна r f, кроме числа Штреля S, могут также использоваться для характеристики общей оптической функции системы 1 доставки лазерного луча. Поскольку большие числа Штреля в комбинации с большими числовыми апертурами NA преобразуются в маленькие величины радиусов фокальных пятен r f, то по всем конфигурациям A-D радиус фокального пятна r f может в некоторых исполнениях оставаться в целевой области глаза ниже 2 мкм, в других, ниже 4 мкм, в еще одних, ниже 10 мкм.
Для более точной характеристики рабочих характеристик системы доставки лазерного луча и для представления существенного воздействия роговицы и хрусталика на распространение луча, величины NA и S в таблицах 11A-B были получены путем конструирования системы, включающей глаз как неотъемлемую часть оптической конструкции. В некоторых конструкциях, глаз моделируется в его естественной форме. В других, включается степень патологического уплощения глаза для представления аутентичного хирургического условия.
В таблице 12 суммируется простая модель релевантных глазных тканей, как показано моделью человеческого глаза 850 на фиг. 15. (Нумерация поверхностей была выбрана для продолжения нумерации таблицы 10, начиная с поверхности 18, поверхности, соединяющей интерфейс 800 пациента с роговичной тканью). Глазная ткань может моделироваться роговицей толщиной 0,6 мм (вносимой из интерфейса пациента через общую поверхность 18), внутриглазной жидкостью (вносимой из роговицы через поверхность 19) и хрусталиком (вносимым из внутриглазной жидкости через поверхность 20). Разделения глазных поверхностей обрабатываются аналогично разделениям поверхностей 1-16 хрусталика.
Величины NA и S в таблицах 11A-B рассчитывались с использованием данной модели глазной ткани. Родственные модели глаза приводят к сравнимым критериям аберрации.
В еще одном отдельном аспекте, в некоторых исполнениях оптической конструкции всей системы 1 доставки лазерного луча может быть упрощена путем сохранения искажений и искривлений поля, не корректируемых оптическими средствами.
Фиг. 16 иллюстрирует, что конструкции в некоторых системах придали бы хирургической системе менее выгодную позиционную точность. Квадратные точки указывают положение фокального пятна по мере того как зеркало XY-сканера 300 проводит пошаговое сканирование первого порядка, а Z-сканер 450 осуществляет сканирование на фокальную глубину Z перемещением подвижного расширителя луча 500 шагами по 5 мм. Видно, что «фокальная плоскость», определяемая в виде расположений фокального пятна, сканированных по направлениям XY, при одновременном удерживании постоянной фокальной глубины Z, является искривленной. На латеральной периферии, глубина разреза мельче, что согласуется с известным поведением линз с не корректированной кривизной поля.
Аналогичным образом, если зеркала XY-сканера 300 удерживаются фиксированными, а Z-сканер 450 сканирует на фокальную глубину Z, то латеральное положение фокального пятна изменяется. Дополнительно усложняя конструкцию, ни радиальное латеральное положение по направлениям XY, ни фокальная глубина Z не проявляет линейную зависимость от соответствующих положений сканера. В плоскости XY данные искажения называются бочкообразными искажениями или искажениями в форме иголочных подушечек. (Во многих исполнениях, третья координата, угол азимута XY-сканера 300 переводится неизменной в угол азимута фокальных положений и, следовательно, должна подавляться).
Фиг. 17 иллюстрирует, как некоторые исполнения системы 1 доставки лазерного луча предоставляют новые, вычислительные решения описанных проблем. Координаты сканера представлены в сферических координатах (ζ, χ, ϕ), где ζ представляет положение Z-сканера 450, χ представляет угол отклонения XY-сканера 300 от оптической оси, и ϕ представляет угол азимута. Положения фокального пятна представлены в цилиндрических фокальных координатах (z, r, ϕ), причем z представляет фокальную глубину Z, r представляет радиальное расстояние от оптической оси, и ϕ представляет угол азимута.
Угол азимута фокального положения может быть по существу таким же, как угол азимута сканеров и, таким образом, не показан. Остающиеся координаты (ζ, χ) XY-сканера и Z-сканера могут дискретизироваться в пределах их соответствующих интервалов сканирования, определяя решетку сканирования и соответствующую матрицу C ij сканера, определяемую как C ij=(ζ i , χ j). Если действительные координаты сканера задают величиной (ζ i0 , χ j0), матрица C ij сканирования составляет 1 в данной конкретной паре (i0, j0) и ноль для всех других пар (i, j).
Аналогичным образом, положения фокального пятна могут характеризоваться двумерной фокальной матрицей S kl, где S kl связан с дискретизированными радиальными координатами и координатами фокальной глубины Z (z k , r l). С точки зрения матрицы C ij сканера и фокальной матрицы S kl, оптическую рабочую характеристику системы доставки 1 лазерного луча может характеризоваться четырехмерной переходной матрицей T ijkl, которая выражает, как координаты (ζ i , χ j) сканера преобразуются в фокальные координаты (z k , r l) в целом: S=TC, или детально:

Хотя переходная матрица T ijkl представляет линейную зависимость между матрицей C ij сканера и фокальной матрицей S kl, в некоторых других исполнениях между матрицей C ij сканера и фокальной матрицей S kl может существовать нелинейная зависимость. В этих исполнениях, уравнение (5) замещается нелинейной зависимостью.
Система 1 доставки лазерного луча может быть сконструирована для оптимизации элементов переходной матрицы T вычислительным прослеживанием лучей, физической калибровкой или комбинацией обоих способов. Исполнение способа физической калибровки описано в заявке на патент США US20090131921, которое может использоваться для такой цели.
Обычно, переходная матрица T является инвертируемой и может использоваться для создания инвертированной переходной матрицы, T 1, которая соединяет элементы фокальной матрицы S kl с матрицей C ij сканера.
Альтернативно, в некоторых вариантах осуществления, инвертированная переходная матрица T 1 может быть определена непосредственно путем начала процесса вычислительного конструирования с желательной фокальной матрицей S kl в целевой области и использования, например, прослеживания луча для реконструкции соответствующей матрицы C ij сканера.
Фиг. 17-18 иллюстрируют такие взаимосвязи. Данные чертежи представляют собой номограммы, иллюстрирующие, на какие (ζ i , χ j) координаты сканера могут быть настроены XY-сканер 300 или Z-сканер 450 для фокусировки луча на координаты (z k , r j) фокуса, показанные на осях z и r.
На фиг. 17 показан угол χ наклона XY-сканера 300, соответствующий (z, r) координатам фокуса (фокальные координаты). В качестве примера, для достижения глубины Z в z=6 мм и радиального положения r=4 мм, пунктирные линии указывают, что может использоваться угол наклона XY-сканера χ=6,4 градуса.
Фиг. 18 показывает, что для достижения таких же (z, r)=(4,6) координат фокуса, может использоваться положение сканирующего по направлению Z сканера ζ=15,5 мм. Полученные вычислительными методами номограммы могут храниться в памяти компьютера в виде справочных таблиц. Величины между хранящимися в памяти компьютера справочными координатами можно быстро определить двумерной линейной или квадратичной интерполяцией.
Знание переходной матрицы T и ее инверсией T 1 обеспечивает возможность вариантов осуществления системы 1 доставки лазерного луча для коррекции аберраций, показанных на фиг. 16, вычислительными способами вместо оптических способов. Данные варианты осуществления могут включать вычислительный контроллер, который может управлять, по меньшей мере, одним из XY-сканера 300 и Z-сканера 450 для регулирования оптической дисторсии системы 1 доставки лазерного луча.
Фиг. 19 иллюстрирует, что, например, если в целевой области желательно сканирование по схеме сканирования со сниженной оптической дисторсией, например, вдоль плоской фокальной плоскости на заданной фокальной глубине z по направлению Z, то вычислительный контроллер может выполнять этапы следующего способа вычислительного управления 900:
(910): прием, по меньшей мере, одной из входных (z k , r l) фокальных координат и элементов фокальной матрицы S kl, соответствующих схеме сканирования со сниженной оптической дисторсией в целевой области;
(920): вычисление или извлечения из хранящихся в памяти, по меньшей мере, одной из (ζ i , χ j) координат сканера и элементов матрицы C ij сканера, соответствующих входным (z k , r l) фокальным координатам или элементам фокальной матрицы S kl, используя заданную инвертированную переходную матрицу (T 1)ijkl; и
(930): регулирование, по меньшей мере, одного из Z-сканера 450 и XY-сканера 300 в соответствии с вычисленными (ζ i , χ j) координатами сканера для сканирования фокального пятна в соответствии с входными (z k , r l) фокальными координатами или элементами фокальной матрицы S kl.
Системы доставки лазерного луча, имеющие такой вычислительный контроллер, могут снизить оптическую дисторсию относительно таких же или подобных лазерных систем без таких контроллеров. Степень снижения в некоторых вариантах осуществления может достигать до 10%, а в других вариантах осуществления - до 30%.
Сниженная оптическая дисторсия может представлять собой любое из аберрации, кривизны поля, бочкообразной дисторсии, подушкообразной дисторсии, искривленной фокальной плоскости и изогнутой линии сканирования, предназначенной проходить параллельно оси Z.
В некоторых исполнениях, вычислительный контроллер выполняет указанные функции совместно с другими блоками системы доставки лазерного луча, включая прекомпенсатор 200, XY-сканер 300, Z-сканер 450 и объектив 700, с возможным использованием любых из их описанных выше признаков.
Число возможных аналогичных исполнений очень велико, основываясь на принципе вычислительного управления для уменьшения оптических аберраций. Например, вычислительный контроллер в некоторых вариантах осуществления может быть способен сканировать фокальное пятно по фокальной плоскости с кривизной ниже критической величины кривизны. В некоторых других исполнениях, поверхности с заданными профилями могут сканироваться соответствующей операцией вычислительного контроллера.
Хотя документ содержит много конкретных аспектов, их не следует рассматривать как ограничения объема изобретения или притязаний на приоритет, но скорее как описание признаков, характерных для конкретных вариантов осуществления изобретения. Определенные признаки, которые описаны в настоящем документе в контексте отдельных вариантов осуществления, могут быть также исполнены в комбинации в одном варианте осуществления. Напротив, различные признаки, которые описаны в контексте одного варианта осуществления, могут также исполняться во множественных вариантах осуществления отдельно или в любой подходящей комбинации. Кроме того, хотя признаки могут быть описаны выше как действующие в определенных вариантах осуществления и даже первоначально заявленные как таковые, один или более признаков из заявленной комбинации могут в некоторых случаях быть изъяты из комбинации, и заявленная комбинация может быть направлена на субкомбинацию или вариант субкомбинации.
Раскрыт ряд исполнений лазерных хирургических методик с направленной визуализацией, устройство и система. Однако на основании описанного, в представленные исполнения могут быть внесены изменения и усовершенствования и предложены другие исполнения.
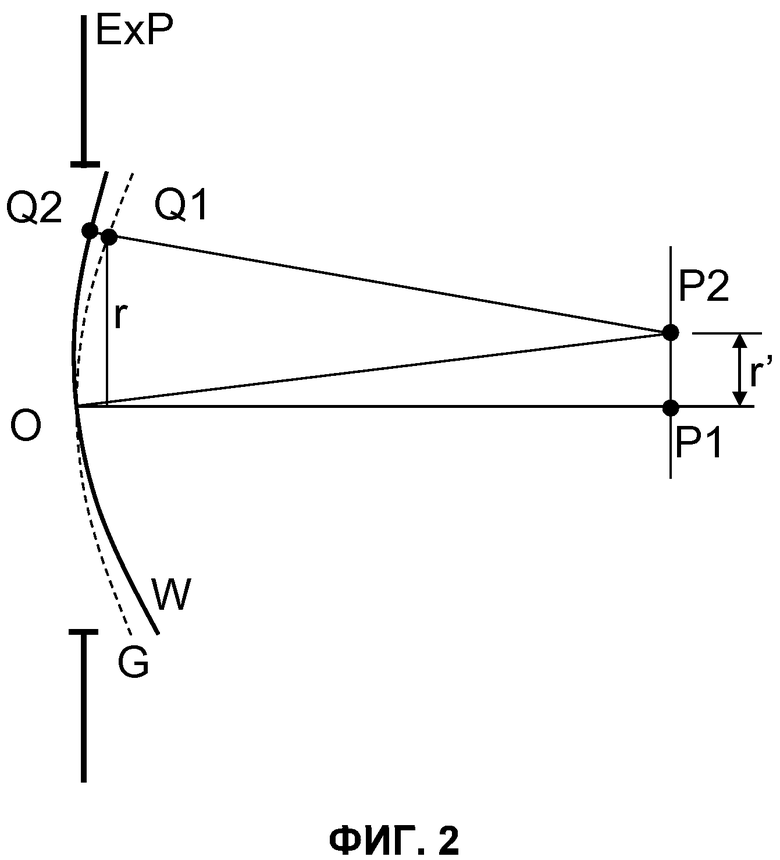
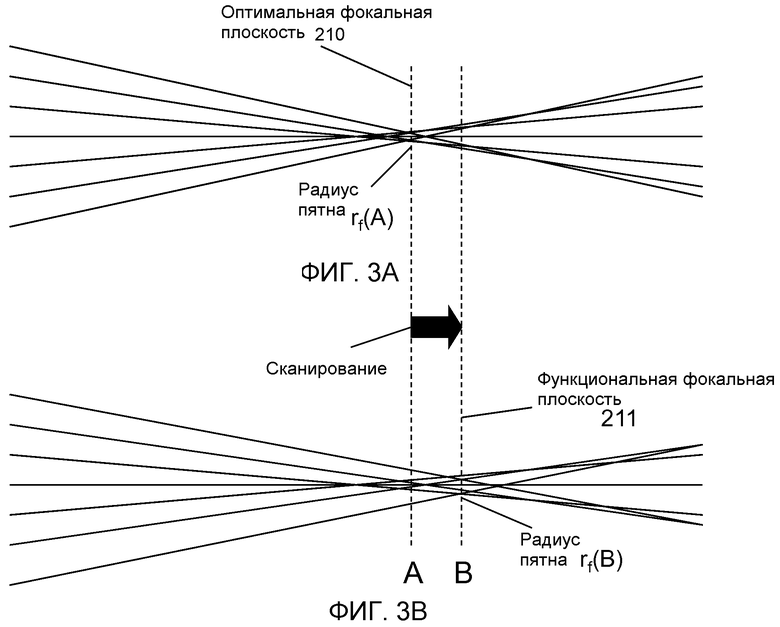
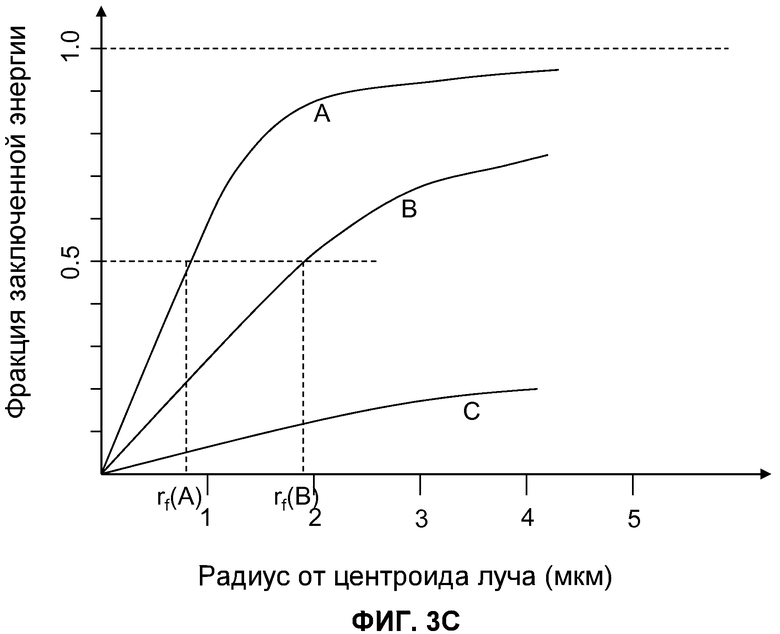
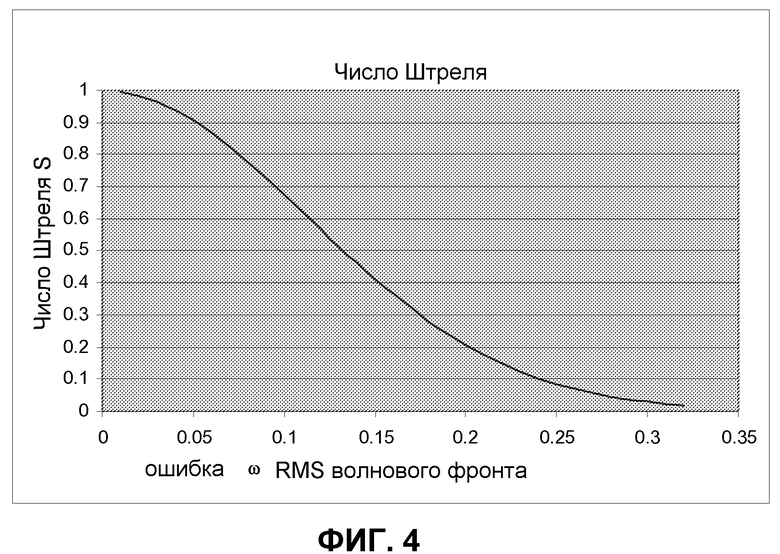
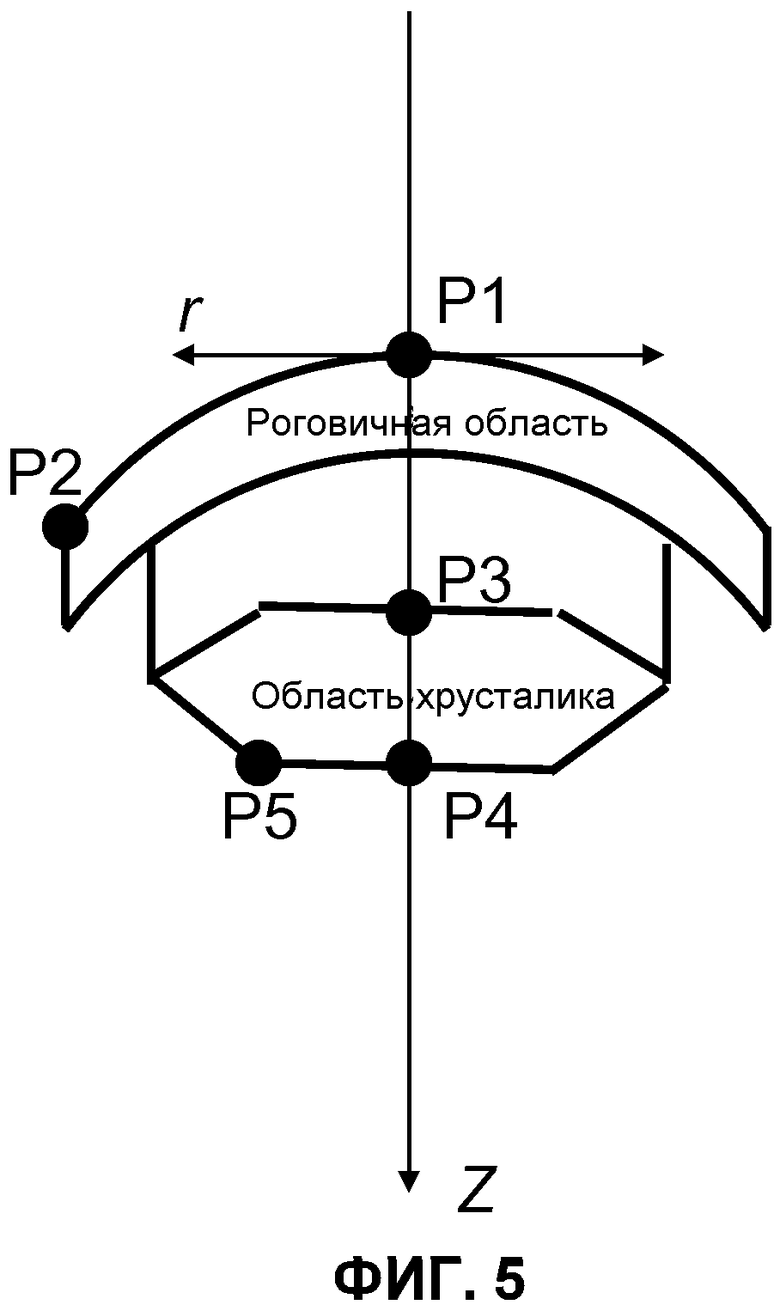
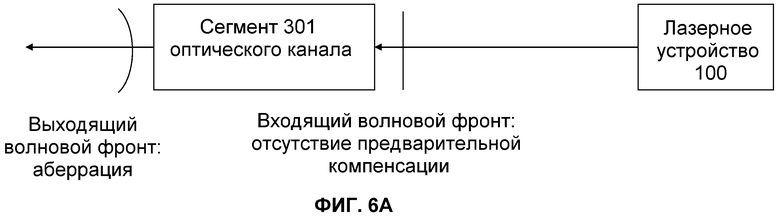
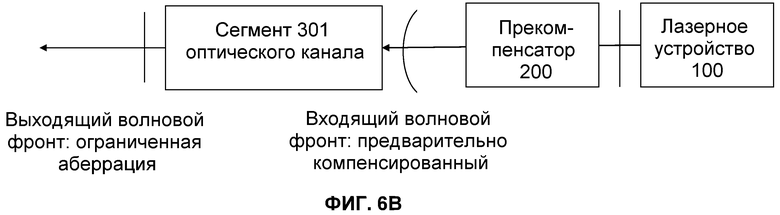
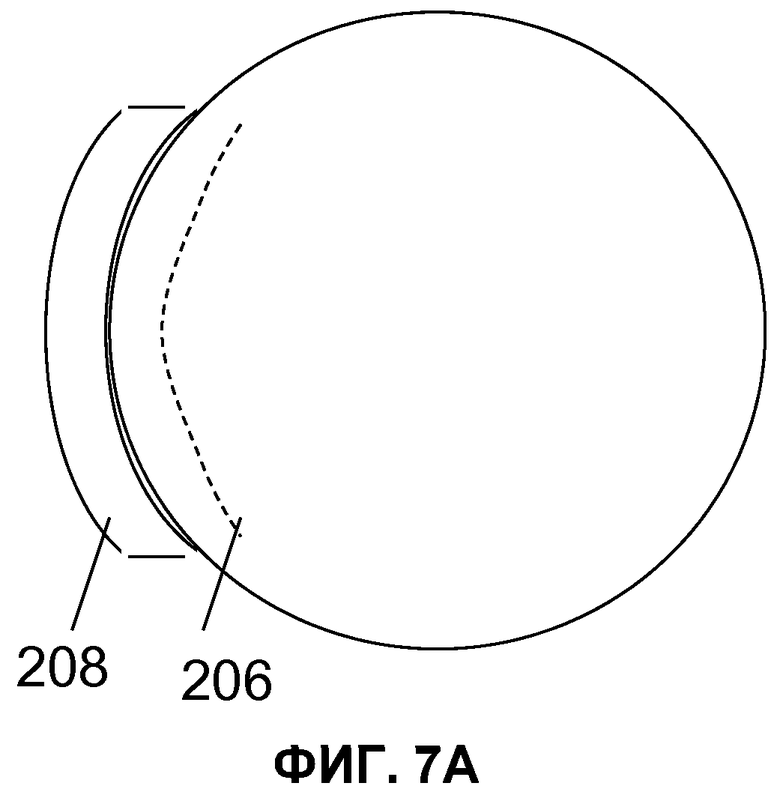
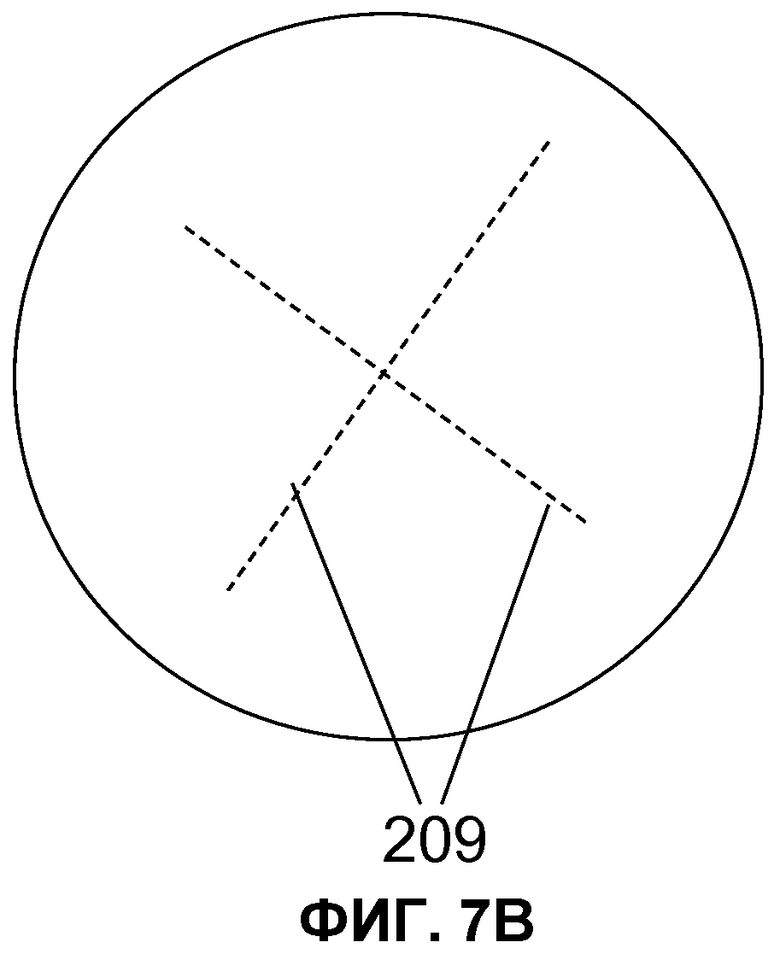
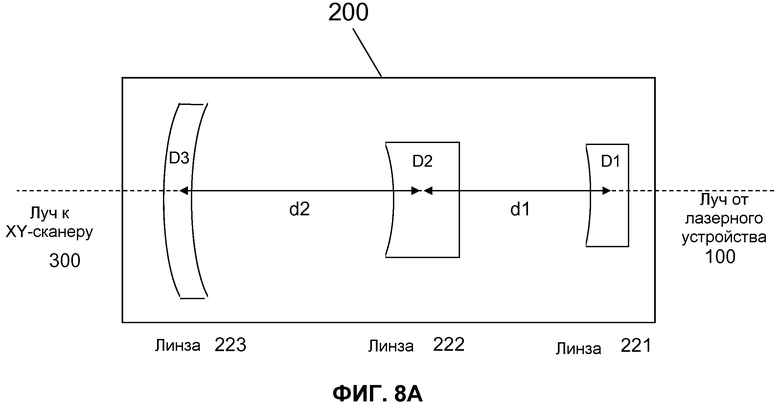
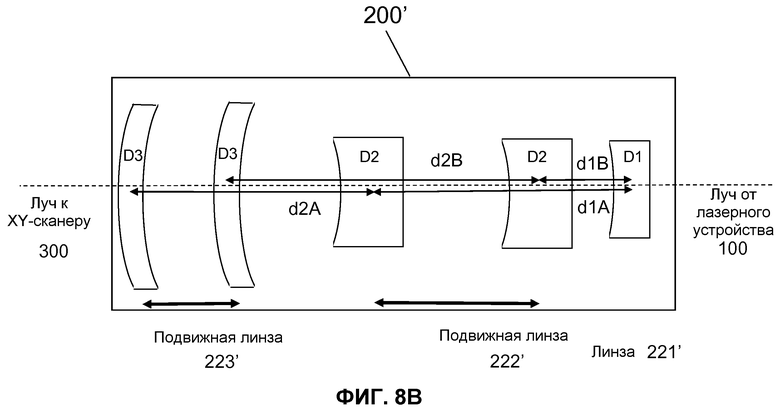
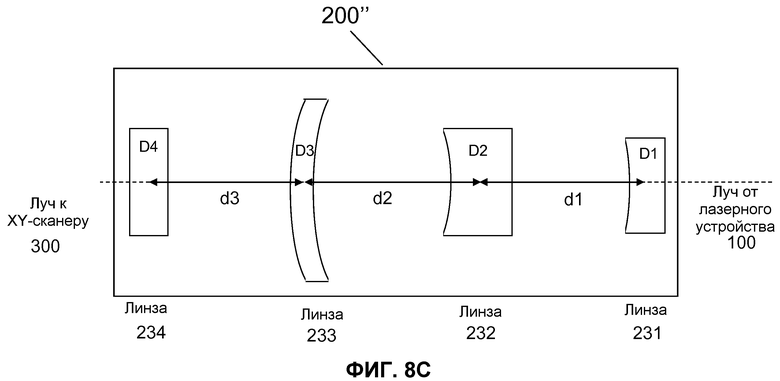
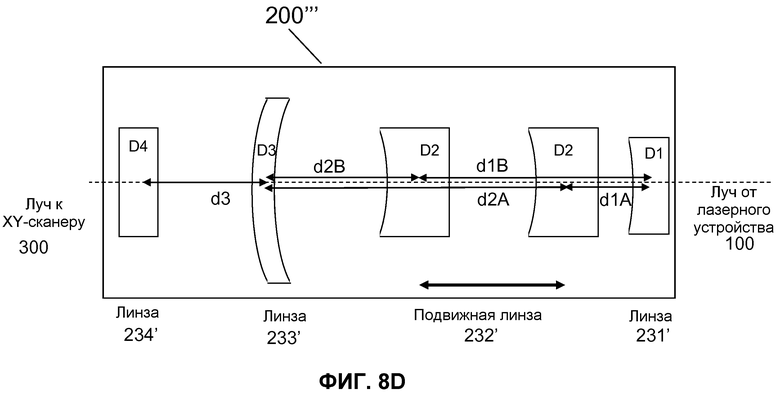
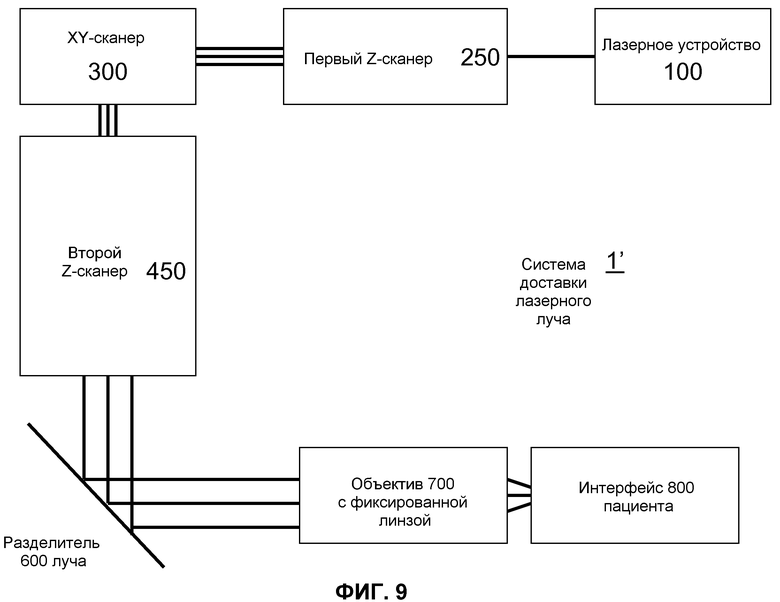
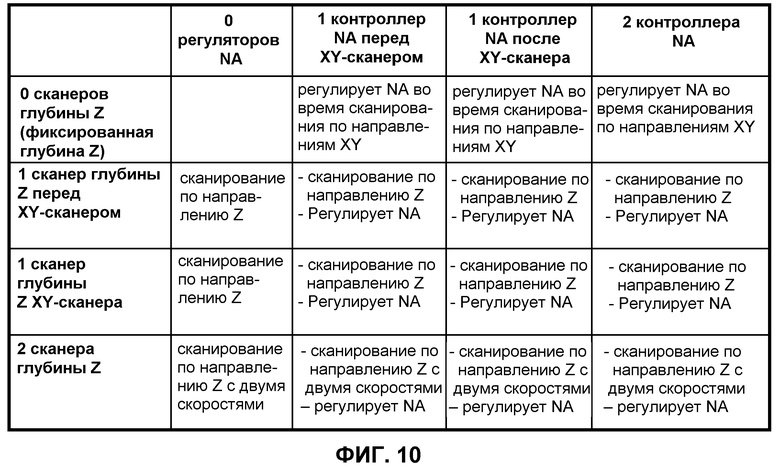
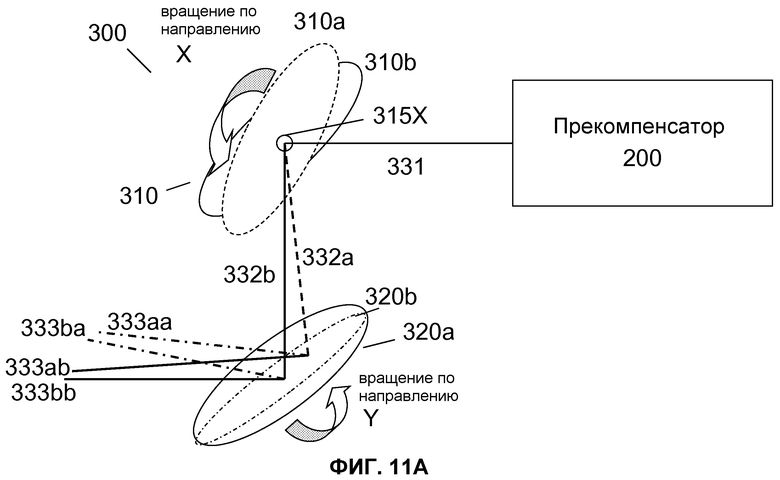
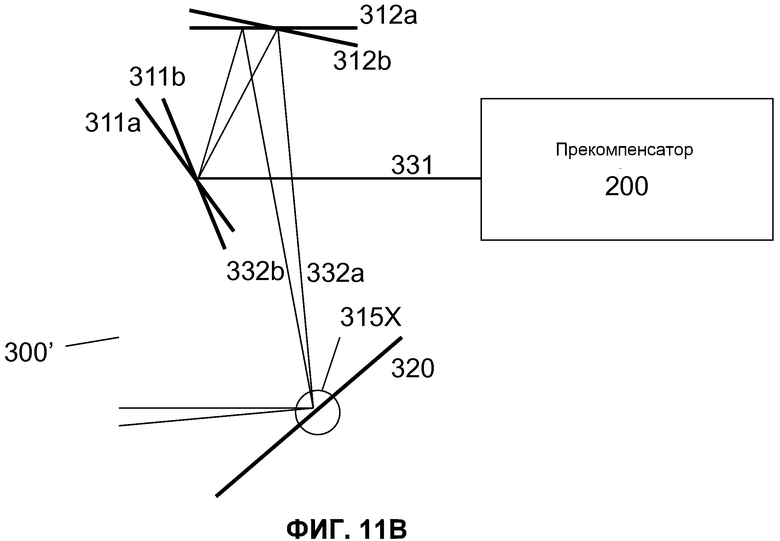
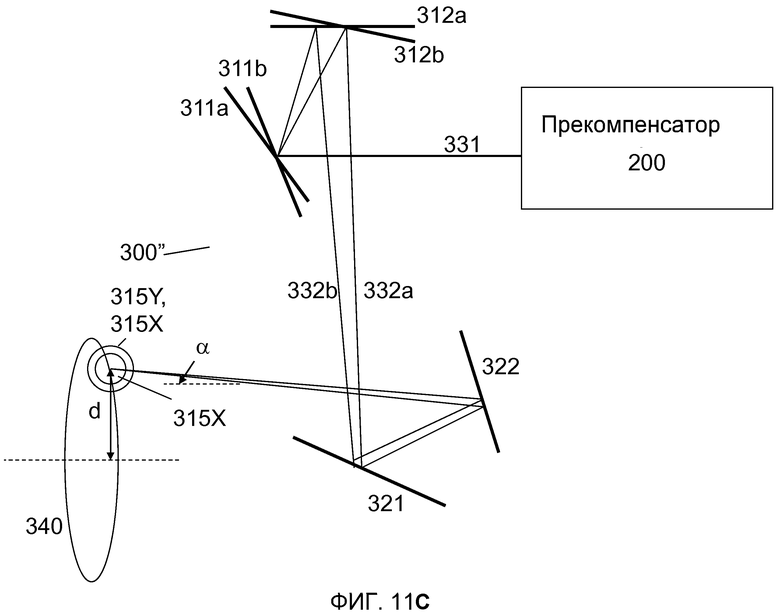
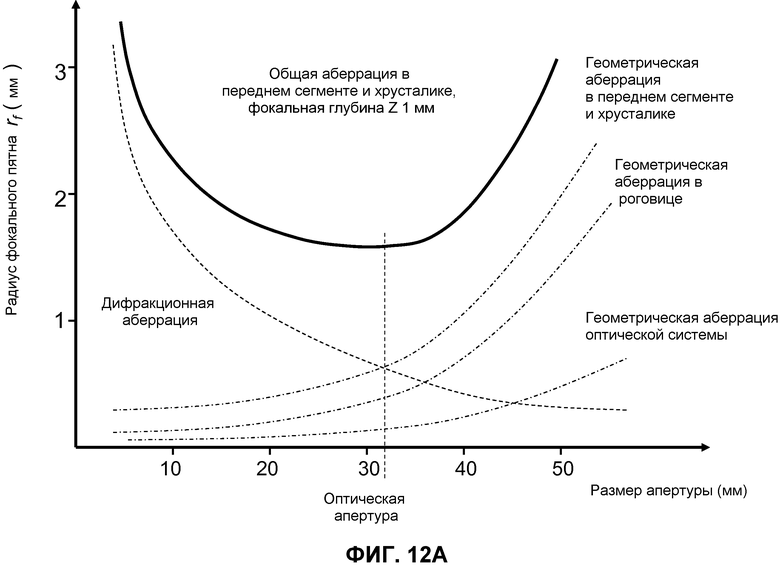
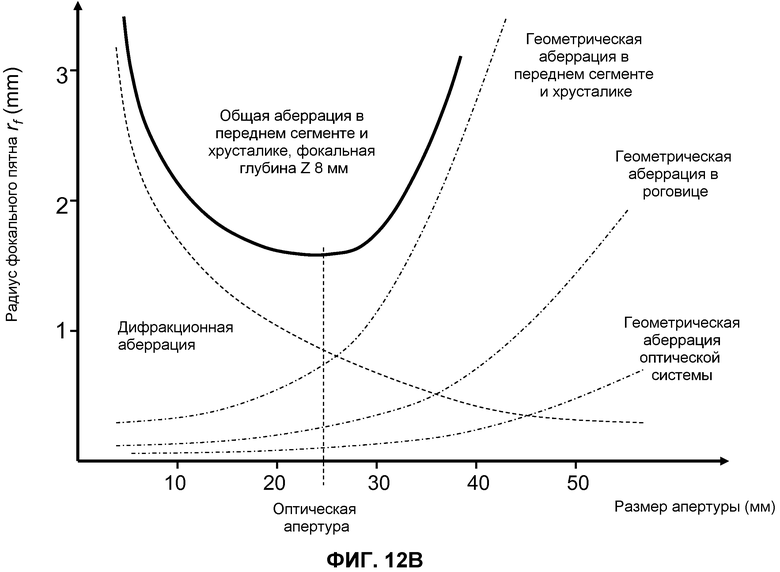
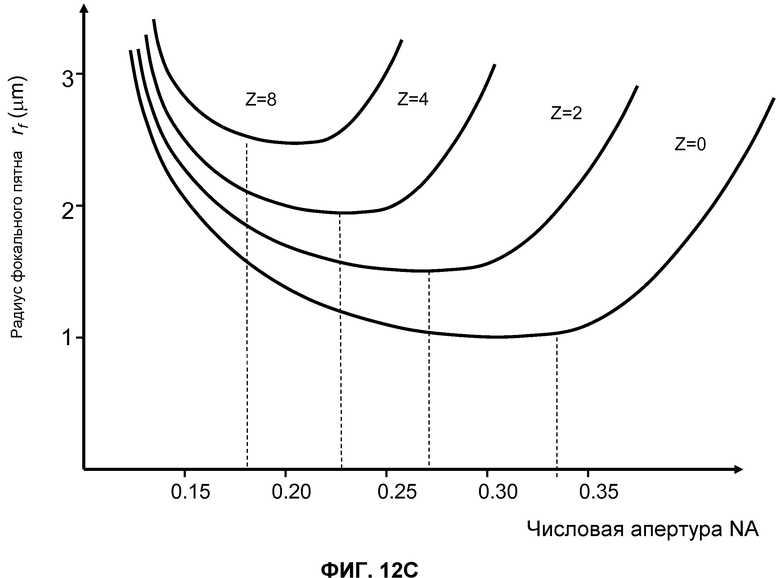

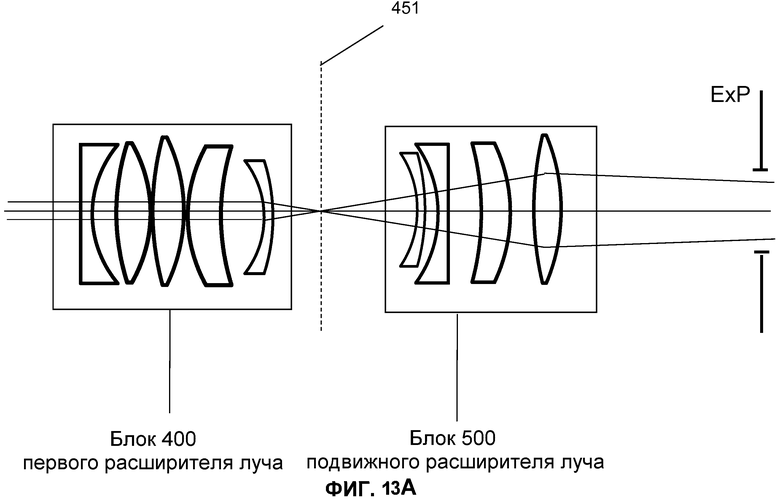
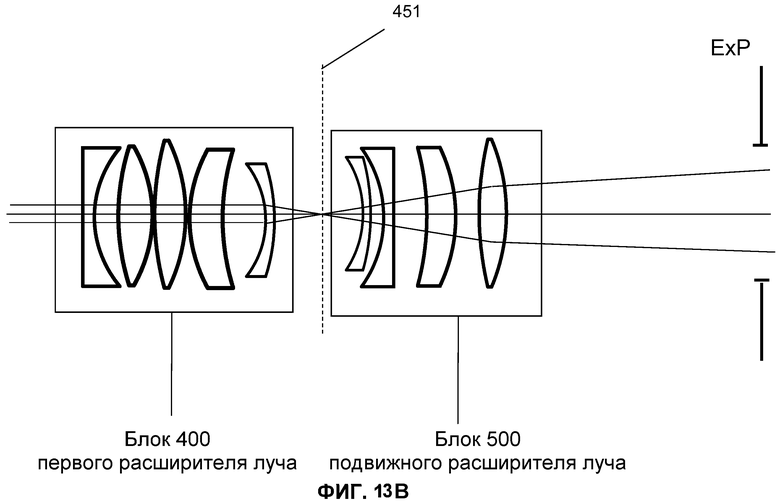
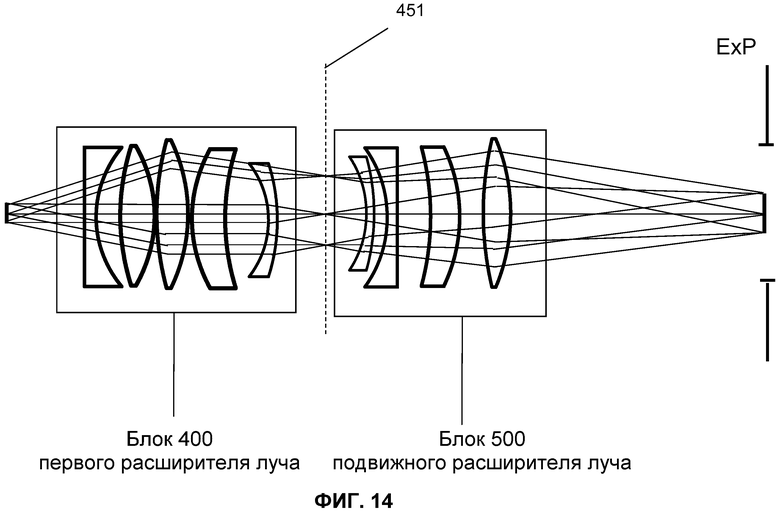
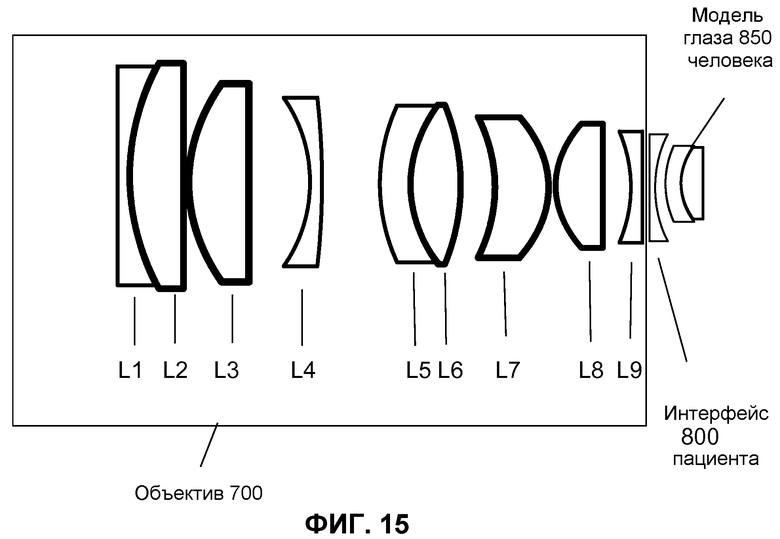
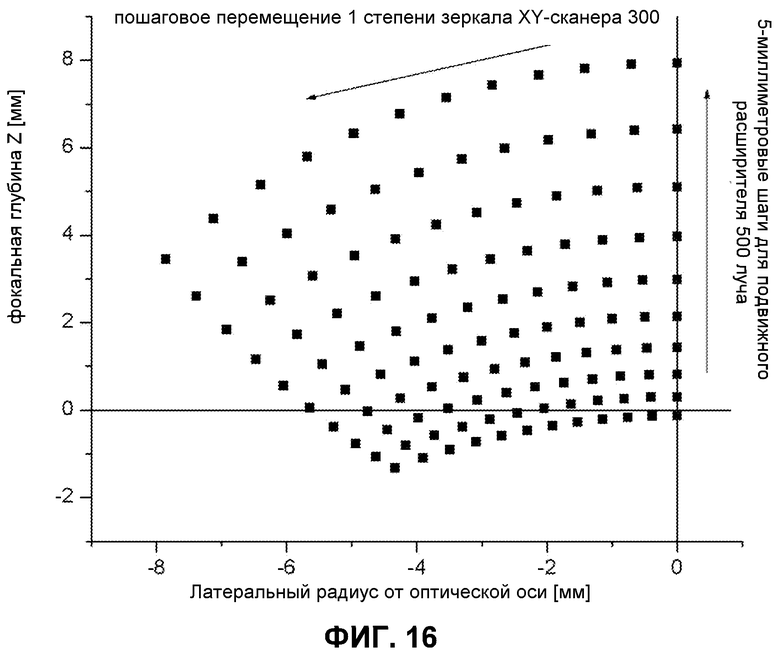
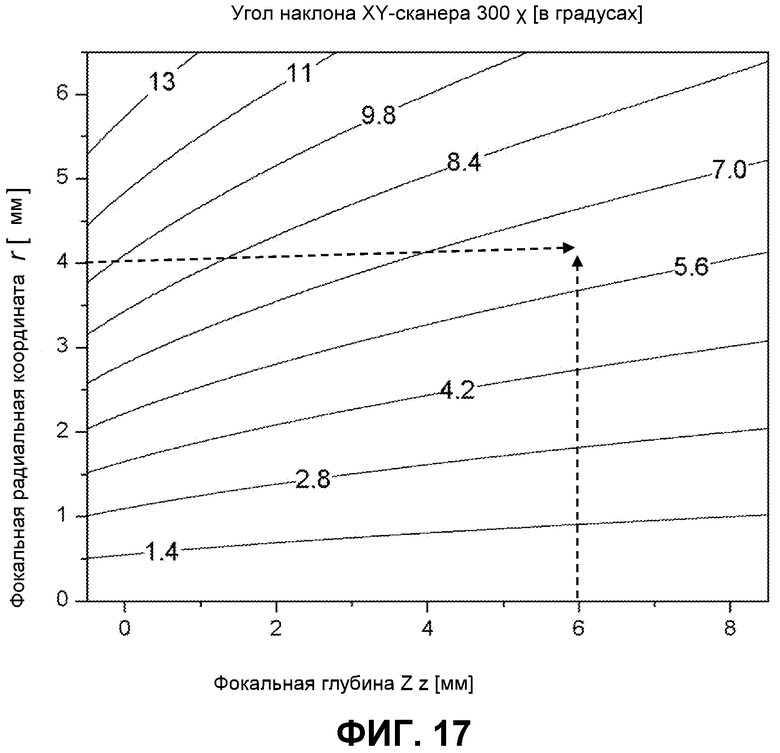
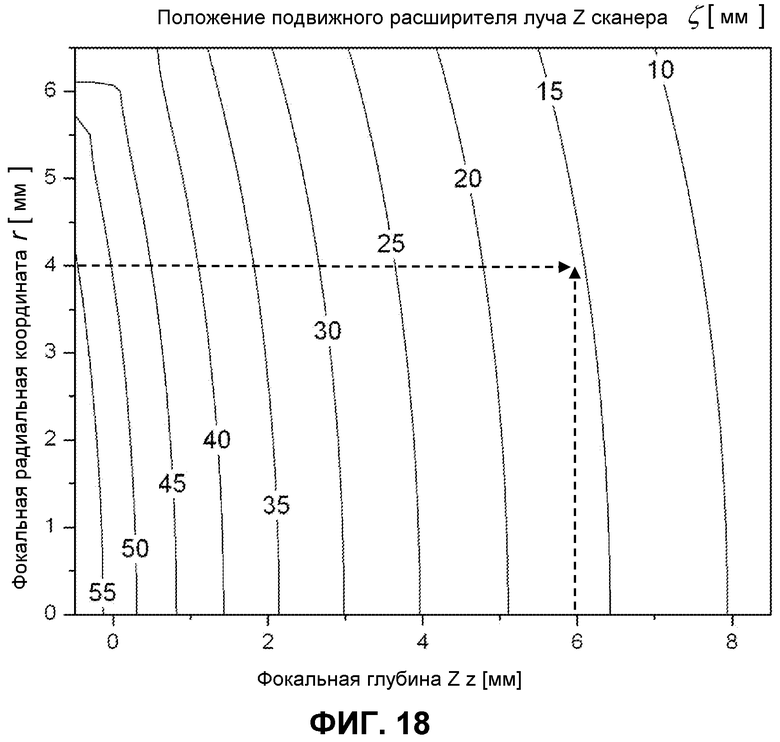
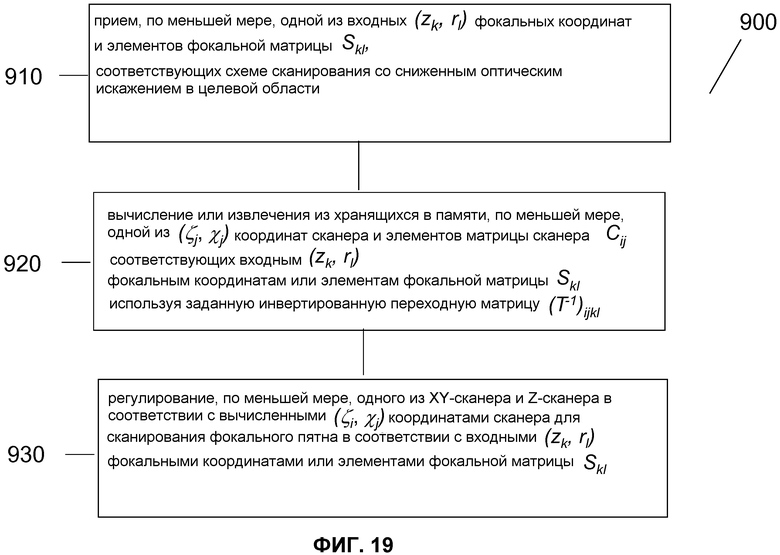
Группа изобретений относится к медицинской технике. Офтальмологическая лазерная система включает источник лазерного излучения для генерирования импульсного лазерного луча; XY-сканер для приема импульсного лазерного луча и для испускания сканирующего по направлениям XY луча, производящего сканирование по двум направлениям, по существу поперечным оптической оси; и многофункциональный Z-сканер, предназначенный для приема сканирующего по направлениям XY луча и для испускания сканирующего по направлениям XYZ луча, причем сканер имеет числовую апертуру NA и фокальное пятно в целевой области и предназначен для модификации числовой апертуры NA,
по существу независимо от сканирования фокальной глубины Z фокального пятна по оптической оси. Группа изобретений обеспечивает выполнение хирургических вмешательств на хрусталике глаза. 3 н. и 33 з.п. ф-лы, 19 ил., 12 табл.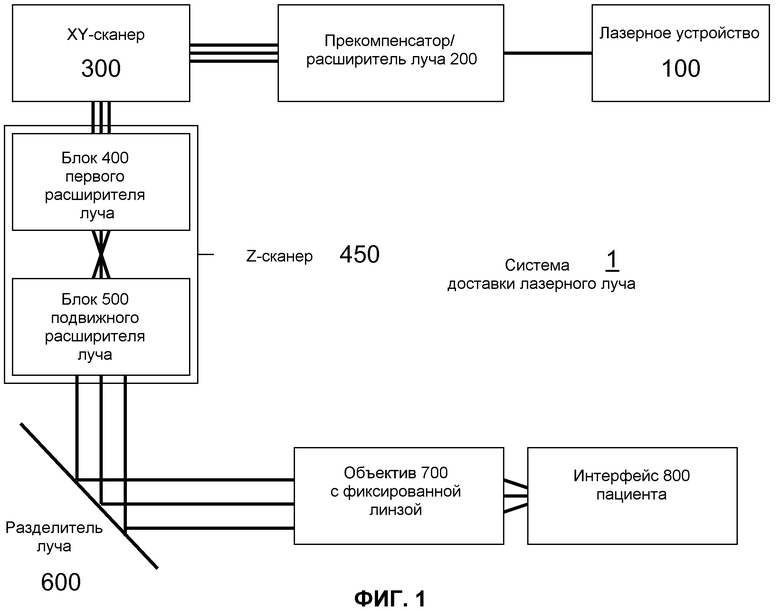
1. Офтальмологическая лазерная система, содержащая: источник лазерного излучения для генерирования импульсного лазерного луча; XY-сканер для приема импульсного лазерного луча; и для испускания сканирующего по направлениям XY луча, производящего сканирование по двум направлениям, по существу поперечным оптической оси; и многофункциональный Z-сканер для приема сканирующего по направлениям XY луча; и для испускания сканирующего по направлениям XYZ луча, причем Z-сканер имеет числовую апертуру NA и фокальное пятно в целевой области; и предназначен для модификации числовой апертуры NA, по существу независимо от сканирования фокальной глубины Z фокального пятна по оптической оси.
2. Офтальмологическая лазерная система по п.1, в которой Z-сканер включает: первый блок расширителя луча; подвижный блок расширителя луча; и вторичный оптический регулятор.
3. Офтальмологическая лазерная система по п.1, в которой: испускаемый сканирующий по направлениям XYZ луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации; общая аберрация имеет оптимум как функцию числовой апертуры NA при оптимальной числовой апертуры NAopt (z) для фокальной глубины Z; и Z-сканер может настраиваться для модификации числовой апертуры NA до оптимальной числовой апертуры NAopt (z) при фокальной глубине Z.
4. Офтальмологическая лазерная система по п.3, в которой: оптимальная общая аберрация соответствует критерию оптимальной аберрации, где критерий оптимальной аберрации представляет собой минимум одного из радиуса rf фокального пятна, ошибки ω RMS волнового фронта и коэффициента α40 сферической аберрации или максимум числа Штреля S.
5. Офтальмологическая лазерная система по п.4, в которой: критерий оптимальной аберрации соответствует одной из пяти контрольных точек P1=(0,0), P2=(2,6), P3=(5,0), P4=(8,0), P5=(8,3) в местоположениях (z, r), все в миллиметрах, под любым углом ϕ азимута, где z обозначает расстояние по оптической оси и r обозначает соответствующую радиальную цилиндрическую координату, и (0,0) системы цилиндрических координат обозначает переднюю и центральную точку целевой области.
6. Офтальмологическая лазерная система по п.1, в которой: испускаемый сканирующий по направлениям XYZ луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации; и числовая апертура NA является настраиваемой для снижения на фокальной глубине Z общей аберрации лазерной системы, по меньшей мере, на процентную долю Р (MovableExpander) относительно общей аберрации аналогичной лазерной системы, имеющей Z-сканер с не настраиваемой числовой апертурой NA; где процентная доля Р (MovableExpander) составляет одну из величин 20%, 30%, 40% и 50%.
7. Офтальмологическая лазерная система по п.6, в которой: общая аберрация характеризуется критерием аберрации, причем критерий аберрации представляет собой один из радиуса rf фокального пятна, ошибки ω RMS волнового фронта и коэффициента α40 сферической аберрации.
8. Офтальмологическая лазерная система по п.6, в которой: критерий аберрации, соответствующий одной из пяти контрольных точек P1=(0,0), P2=(2,6), P3=(5,0), P4=(8,0), P5=(8,3), в местоположениях (z, r), все в миллиметрах, под любым углом ϕ азимута, где z обозначает расстояние по оптической оси и r обозначает соответствующую радиальную цилиндрическую координату; и (0,0) системы цилиндрических координат обозначает переднюю и центральную точку целевой области.
9. Офтальмологическая лазерная система по п.1, где: испускаемый сканирующий по направлениям XYZ луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации; и числовая апертура NA может настраиваться для увеличения на фокальной глубине Z числа Штреля S, соответствующего общей аберрации лазерной системы, по меньшей мере, на процентную долю P (MovableExpander) выше, чем число Штреля S лазерной системы, где Z-сканер не имеет настраиваемой числовой апертуры NA; где процентная доля Р (MovableExpander) составляет одну из величин 20%, 30%, 40% и 50%.
10. Офтальмологическая лазерная система по п.1, в которой: испускаемый сканирующий по направлениям XYZ луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации; и числовая апертура NA может настраиваться для увеличения на фокальной глубине Z числа Штреля S, соответствующего общей аберрации до величины 0,8, где число Штреля S аналогичной лазерной системы, отличающейся только наличием Z-сканера без настраиваемой числовой апертуры, составляет менее 0,8.
11. Офтальмологическая лазерная система по п.10, в которой: число Штреля S соответствует одной из пяти контрольных точек P1=(0,0), P2=(2,6), P3=(5,0), P4=(8,0), P5=(8,3), в местоположениях (z, r), все в миллиметрах, под любым углом ϕ азимута, где z обозначает расстояние по оптической оси и r обозначает соответствующую радиальную цилиндрическую координату, и (0,0) системы цилиндрических координат обозначает переднюю и центральную точку целевой области.
12. Офтальмологическая лазерная система по п.1, в которой: Z-сканер сконфигурирован для сканирования фокальной глубины Z лазерной системы в пределах диапазона сканирования по направлению Z, где диапазон сканирования по направлению Z составляет один из: от 5 миллиметров до 10 миллиметров и от 0 миллиметров до 15 миллиметров.
13. Офтальмологическая лазерная система по п.1, в которой: испускаемый сканирующий по направлениям XYZ луч имеет геометрическую аберрацию и дифракционную аберрацию; и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации; причем общая аберрация имеет последовательность оптимальных величин общей аберрации при последовательности оптимальных числовых апертур NAopt (z), соответствующих последовательности фокальных глубин Z; где Z-сканер может настраиваться для модификации числовой апертуры NA с ее доведением до последовательности оптимальных числовых апертур NAopt (z) при последовательности фокальных глубин Z.
14. Офтальмологическая лазерная система по п.13, в которой: аберрация характеризуется критерием аберрации, причем критерий аберрации представляет собой один из радиуса rf фокального пятна, числа Штреля S, ошибки ω RMS волнового фронта и коэффициента α40 сферической аберрации, соответствующих последовательности фокальных глубин Z.
15. Офтальмологическая лазерная система по п.13, в которой: радиальная координата фокального пятна вдоль последовательности фокальных глубин Z составляет менее чем 3 мм.
16. Офтальмологическая лазерная система по п.1, в которой: испускаемый сканирующий по направлениям XYZ луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации; где числовая апертура NA может доводиться до последовательности числовых апертур NA(z) при последовательности фокальных глубин Z для уменьшения репрезентативной общей аберрации, по меньшей мере, на процентную долю P(scan) относительно аналогичной лазерной системы, где Z-сканер не имеет настраиваемую числовую апертуру NA.
17. Офтальмологическая лазерная система по п. 16, в которой: репрезентативная общая аберрация представляет собой одну из средней, минимальной или максимальной общей аберрации по диапазону сканирования по направлению Z.
18. Офтальмологическая лазерная система по п.16, в которой: общая аберрация характеризуется одним из критериев радиуса rf фокального пятна, числа Штреля S, ошибки ω RMS волнового фронта и коэффициента α40 сферической аберрации, соответствующих последовательности фокальных глубин Z.
19. Офтальмологическая лазерная система по п.16, где: процентная доля P (scan) составляет одну из величин 20%, 30%, 40% и 50%.
20. Офтальмологическая лазерная система по п.1, где: числовая апертура NA может доводиться от первой величины, когда выполняется процедура на роговице, до второй величины, когда выполняется процедура на хрусталике.
21. Офтальмологическая лазерная система по п.20, в которой: первая величина находится в диапазоне 0,2-0,5; а вторая величина находится в диапазоне 0,1-0,3.
22. Офтальмологическая лазерная система по п.20, в которой: первая величина находится в диапазоне 0,25-0,35; а вторая величина находится в диапазоне 0,15-0,25.
23. Офтальмологическая лазерная система по п.1, в которой: блок расширителя луча представляет собой один из фиксированного блока и подвижного блока.
24. Лазерная система для выполнения хирургического вмешательства по поводу катаракты, содержащая: источник лазерного излучения для генерирования импульсного лазерного луча; XY-сканер для сканирования импульсным лучом по направлениям XY, по существу поперечным оптической оси; и Z-сканер для сканирования по направлению Z фокального пятна луча, сканирующего по направлениям XY, в целевой области по оптической оси Z; и для доведения числовой апертуры NA с целью отслеживания оптимальной числовой апертуры NAopt (z) по мере сканирования фокального пятна по направлению Z.
25. Лазерная система по п.24, в которой: луч, сканирующий по направлению Z, имеет общую аберрации, причем общая аберрация имеет оптимум как функцию числовой апертуры NA при оптимальной числовой апертуре NAopt (z) для последовательности фокальных глубин Z; и Z-сканер может настраиваться для модификации числовой апертуры NA для отслеживания оптимальной числовой апертуры NAopt (z) по мере сканирования фокального пятна по последовательности фокальных глубин Z.
26. Лазерная система по п.25, в которой: сканирующий по направлению Z луч имеет геометрическую аберрацию, дифракционную аберрацию и общую аберрацию, равную сумме геометрической аберрации и дифракционной аберрации.
27. Лазерная система по п.24, в которой: числовая апертура NA, отслеживающая оптимальную числовую апертуру NAopt (z), включает: числовую апертуру NA, являющуюся по существу равной NAopt (z); или числовую апертуру NA, находящуюся в пределах близости к процентной доле Р (track) NAopt (z), где Р (track) составляет одну из величин 10%, 20% и 30%.
28. Лазерная система по п.24, в которой Z-сканер включает: интегрированный контроллер, сконфигурированный для сканирования фокального пятна по последовательности фокальных глубин Z и для регулирования числовой апертуры NA для отслеживания оптимальной числовой апертуры NAopt (z), соответствующей последовательности фокальных глубин Z коррелируемым образом.
29. Лазерная система по п.28, в которой: интегрированный контроллер сконфигурирован для сканирования фокального пятна и для регулирования числовой апертуры NA в ходе одного действия регулирования.
30. Лазерная система по п.28, в которой интегрированный контроллер включает один из: регулятора расстояния между первым блоком расширителя луча и блоком подвижного расширителя луча и регулятора положения линзы контроллера.
31. Лазерная система по п.28, в которой интегрированный контроллер включает: два регулятора, сконфигурированных для настройки двух параметров Z-сканера коррелированным образом.
32. Лазерная система по п.24, в которой: Z-сканер сконфигурирован для сканирования фокального пятна в целевой области в пределах диапазона сканирования по направлению Z, простирающегося от 0 мм до 10 мм; и для регулирования числовой апертуры NA в пределах одного из диапазонов: от 0,40 до 0,10 и от 0,35 до 0,15 во время сканирования фокального пятна.
33. Лазерная система по п.24, в которой Z-сканер сконфигурирован: для сканирования фокального пятна и для регулирования числовой апертуры NA в комбинации с XY-сканером.
34. Лазерная система по п. 24, в которой Z-сканер сконфигурирован: для сканирования фокального пятна и для регулирования числовой апертуры NA в комбинации со вспомогательным Z-сканером, расположенным между источником лазерного излучения и XY-сканером.
35. Офтальмологическая лазерная система, содержащая: источник лазерного излучения для генерирования импульсного лазерного луча; XY-сканер для приема импульсного лазерного луча и для испускания сканирующего по направлениям XY луча, сканирующего по двум направлениям, по существу поперечным оптической оси; и многофункциональный Z-сканер для приема сканирующего по направлениям XY луча с целью испускания сканирующего по направлениям XYZ луча, сканирующего дополнительно по направлению Z по оптической оси; и для уменьшения числовой апертуры NA в целевой области роговичного диапазона от 0,25 до 0,35, когда фокальная глубина Z лазерной системы является репрезентативной для процедуры на роговице, в диапазоне хрусталика от 0,15 до 0,25, когда фокальная глубина Z лазерной системы является репрезентативной для процедуры на хрусталике.
36. Офтальмологическая лазерная система по п.35, в которой: Z-сканер имеет два регулируемых контрольных параметра, первый контрольный параметр, связанный с расстоянием между первым блоком расширителя луча и блоком подвижного расширителя луча; и второй контрольный параметр, связанный с положением подвижной линзы Z-сканера.
| US20080269731A1 (CASIMIR ANDREW SWINGER et al), 30.10.2008 US20070106285A1 (RAKSI F.), 10.05.2007 US20090131921A1 (KURTZ R.M | |||
| et al), 21.05.2009 US20090149841A1 (KURTZ R.M.), 11.06.2009 RU2183107C2 (ГУ "МНТК "Микрохирургия глаза"), 10.06.2002 |

