Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству и способу определения размеров полостей для полостей внутри объекта, в который введен аэрозоль, содержащий магнитные частицы. Настоящее изобретение, в частности, относится к устройству и способу для определения размера легочных альвеол пациента, при котором упомянутый пациент вдыхает аэрозоль, содержащий магнитные частицы. Дополнительно, упомянутое изобретение относится к компьютерной программе для осуществления упомянутого способа на компьютере и для управления таким устройством.
Уровень техники
Получение изображений с использованием магнитных частиц (MPI) является быстро развивающимся способом получения медицинских томографических изображений. Первые варианты MPI были двумерными, при которых генерировались двумерные изображения. Будущие версии будут трехмерными (3D). Зависящее от времени или четырехмерное (4D) изображение движущегося объекта может быть создано объединением временной последовательности трехмерных изображений в кинофильм при условии, что объект не будет значительно изменяться во время сбора данных для одиночного трехмерного изображения.
MPI является способом получения изображений посредством реконструкции, подобным компьютерной томографии (CT) или магнитно-резонансной томографии (MRI). Соответственно, MPI-изображение интересующего объема объекта генерируется в два этапа. Первый этап, относящийся к сбору данных, выполняется, используя сканер MPI. Сканер MPI имеет средство для генерации статического магнитного градиентного поля, называемого "поле выбора", которое обладает одиночной точкой, свободной от поля (FFP) в изоцентре сканера. Кроме того, сканер имеет средство для генерации зависимого от времени, пространственно близкого к однородному магнитного поля. Фактически, это поле получается наложением быстро меняющегося поля с малой амплитудой, называемого "возбуждающим полем", и медленно меняющегося поля с большой амплитудой, называемого "фокусирующим полем". Добавляя зависящее от времени возбуждающее и фокусирующее поля к статическому полю выбора, FFP может перемещаться вдоль заданной траектории FFP через объем сканирования, окружающий изоцентр. Сканер также имеет конструкцию из одной или более, например трех, приемных катушек и может регистрировать любые напряжения, индуцированные в этих катушках. Для сбора данных объект, изображение которого должно быть получено, помещается в сканер таким образом, что интересующий объем объекта попадает в поле зрения сканера, которое является субнабором объема сканирования.
Объект должен содержать магнитные наночастицы; если объектом является животное или пациент, перед сканированием животному или пациенту вводится контрастное вещество, содержащее такие частицы. Во время сбора данных сканер MPI направляет точку FFP вдоль заранее выбранной траектории, которая намечает объем сканирования или, по меньшей мере, поле зрения. Магнитные наночастицы внутри объекта испытывают воздействие изменяющегося магнитного поля и реагируют изменением своей намагниченности. Изменяющаяся намагниченность наночастиц индуцирует зависящее от времени напряжение в каждой из приемных катушек. Это напряжение оцифровывается в приемнике, связанном с приемной катушкой. Выборки с выхода приемников регистрируются и образуют собранные данные. Параметры, управляющие подробностями сбора данных, образуют протокол сканирования.
На втором этапе формирования изображения, называемом реконструкцией изображения, из данных, собранных на первом этапе, вычисляется или реконструируется изображение. Изображение является дискретной трехмерной матрицей, представляющей дискретную аппроксимацию зависящей от положения концентрации магнитных наночастиц в поле зрения. Реконструкция обычно выполняется компьютером, исполняющим соответствующую компьютерную программу. Компьютер и компьютерная программа реализуют алгоритм реконструкции. Алгоритм реконструкции основывается на математической модели сбора данных. Для всех способов получения изображений с помощью реконструкции эта модель является интегральным оператором, совершающим действия над собранными данными; алгоритм реконструкции старается, в возможной степени, раскрыть действие модели.
Такие устройство и способ MPI обладают тем преимуществом, что они могут использоваться для изучения произвольных объектов исследования, например человеческих тел, неразрушающим образом, без нанесения ущерба и с высоким пространственным разрешением как вблизи от поверхности, так и вдали от поверхности объекта исследования. Такие устройство и способ, в целом, известны и впервые были описаны в патенте DE 10151778 A1 и публикации Gleich, B. и Weizenecker, J. (2005), "Tomographic imaging using the nonlinear response of magnetic particles", Nature, том 435, стр. 1214-1217. Устройство и способ получения изображений с использованием магнитных частиц (MPI), описанные в этой публикации, используют преимущества, даваемые нелинейной кривой намагничивания малых магнитных частиц.
При получении изображения легких здесь могут иметься более подходящие параметры, чем для чистого вентилируемого воздушного пространства. Используя MRI (получение изображений с использованием магнитных частиц) и применяя соответствующую последовательность MRI, может быть определен коэффициент легочной диффузии. Параметры диффузии газов могут обеспечивать более глубокий взгляд в структуру легкого, обнаруживая потенциально важную информацию для астмы, эмфиземы и хронического обструктивного заболевания легких. Коэффициент наблюдаемой диффузии связывается со средним расстоянием до поверхности легкого, таким образом, большая диффузия указывает, например, на увеличенные альвеолы.
Сущность изобретения
Задача настоящего изобретения состоит в обеспечении альтернативного устройства и способа определения размера полости для полостей внутри объекта, в который введен аэрозоль, содержащий магнитные частицы.
В частности, задача настоящего изобретения состоит в обеспечении устройства и способа определения размера легочных альвеол пациента, при котором упомянутый пациент вдохнул аэрозоль, содержащий магнитные частицы, причем устройство и способ способны выявлять информацию, относящуюся к структуре легкого.
В первом варианте настоящего изобретения представляется устройство, содержащее:
средство выбора, содержащее блок генератора сигнала поля выбора и элементы генерации поля выбора для генерации магнитного поля выбора, имеющего такую пространственную структуру напряженности магнитного поля, что в поле зрения формируются первая субзона, имеющая низкую напряженность магнитного поля, и вторая субзона, имеющая более высокую напряженность магнитного поля,
средство возбуждения, содержащее блоки генератора сигнала возбуждающего поля и катушки возбуждающего поля для изменения положения в пространстве двух субзон в поле зрения посредством возбуждающего магнитного поля так, чтобы намагничивание магнитного материала локально изменялось,
приемное средство, содержащее, по меньшей мере, один блок приема сигнала и, по меньшей мере, одну приемную катушку для получения сигналов обнаружения, причем сигналы обнаружения зависят от намагничивания в поле зрения, и на намагничивание влияют изменения положения первой и второй субзон в пространстве, и
средство обработки для определения размера полости для полостей внутри объекта из первых сигналов обнаружения, полученных сразу после введения аэрозоля, и вторых сигналов обнаружения, полученных после продолжительности времени после введения аэрозоля.
В дополнительном варианте настоящего изобретения представляется соответствующий способ.
В еще одном дополнительном варианте настоящего изобретения представляется компьютерная программа, содержащая средство программного кода для предписания компьютеру управлять устройством в соответствии с настоящим изобретением для выполнения этапов способа, соответствующих настоящему изобретению, когда упомянутая компьютерная программа выполняется на компьютере.
Предпочтительные варианты осуществления изобретения определяются в зависимых пунктах формулы изобретения. Следует понимать, что заявленный способ и заявленная компьютерная программа имеют схожие и/или идентичные предпочтительные варианты осуществления как заявленного устройства, так и устройства, определенного в зависимых пунктах формулы изобретения.
Настоящее изобретение основано на идее, что MPI предлагает возможность выявления информации, относящейся к структуре легких, или, в более общем плане, информации, относящейся к размеру полостей, существующих внутри объекта. Такая разница может основываться на генерации сигнала в воздушном пространстве благодаря механизмам быстрого броуновского вращения. При MPI броуновское вращение обычно исключается как эффективный механизм генерации сигнала в жидкой суспензии. Вязкость воздуха составляет всего только 18 мкПа, что ведет к более чем 50-кратной разнице в скорости намагничивания по сравнению с водой. Следовательно, в воздушном пространстве возможно эффективно обнаруживать магнитные частицы, даже если анизотропия настолько высока, что процесс Нееля блокируется.
Когда магнитная частица достигает поверхности легкого (в более общем случае, стенки полости), броуновское вращение блокируется, и сигнал MPI ("сигнал обнаружения") исчезает. Магнитные частицы будут достигать поверхности легкого ("стенки полости") посредством диффузии. Скорость диффузии может оцениваться, используя формулу Эйнштейна

где x - средняя длина пути, r - радиус частиц, η - вязкость среды, k - постоянная Больцмана, T - абсолютная температура и t - время. Например, для вязкости воздуха и диаметра магнитных частиц 40 нм средняя длина пути х за одну секунду составляет приблизительно 50 мкм. Это совпадает с типичным воздушным пространством альвеолы, обычно равным 50-250 мкм.
При эмфиземе воздушное пространство увеличивается, что может обнаруживаться, используя MPI. Например, в варианте осуществления время затухания сигналов обнаружения используется для получения информации о размере альвеол, которая затем позволяет определить, имеются ли какие-либо дефекты. Таким образом, в целом, размер полостей согласно варианту осуществления может определяться, используя время затухания сигнала для сигналов обнаружения.
Поскольку средняя длина пути достаточно короткая и поскольку MPI является очень быстрым при обнаружении сигналов обнаружения, обычно нет необходимости задерживать дыхание на длительное время, например, больше 5 секунд.
Приведенное выше обсуждение предполагает магнитные частицы с полностью блокированным вращением Нееля. Тем не менее, возможно использование сигналов обнаружения, например, использование изменения формы сигнала, как предлагается в варианте изобретения, когда к поверхности легкого (или полости) прикрепляются магнитные частицы с лишь небольшой анизотропией. Поэтому для этой оценки могут использоваться существующие наночастицы оксида железа. Магнитные частицы предпочтительно распыляются в мелкодисперсном аэрозоле и вдыхаются пациентом (или, в целом, вводятся в объект) перед применением способа, соответствующего настоящему изобретению, то есть перед приложением магнитных полей для получения сигналов обнаружения.
Для генерации упомянутого аэрозоля вариант осуществления устройства, соответствующего настоящему изобретению, содержит аэрозольный генератор, в частности генерирующий аэрозоль с выделенными магнитными частицами.
В соответствии с настоящим изобретением первые сигналы обнаружения получают непосредственно после вдоха/введения аэрозоля, а вторые сигналы обнаружения получают после продолжительности времени после вдоха/введения аэрозоля, то есть после того, как магнитным частицам при вдохе, содержащимся в аэрозоле, было предоставлено некоторое время для прохождения (то есть диффузии) в альвеолы/полости. Когда магнитные частицы еще не достигли поверхности легкого/стенки полости (то есть поверхности альвеолы/полости, в которую они проходят), их вязкость сравнительно низкая, поэтому от этих магнитных частиц получают относительно высокий сигнал обнаружения. Однако, когда магнитные частицы достигли поверхности легкого/стенки полости, их вязкость является сравнительно высокой, поэтому от этих магнитных частиц принимается сравнительно низкий сигнал обнаружения. Таким образом, из этих первых и вторых сигналов обнаружения могут быть определены разности сигналов обнаружения при условии, что временной промежуток между получением первых и вторых сигналов обнаружения достаточно велик, чтобы позволить магнитным частицам пройти определенное расстояние.
Изобретение может применяться для определения размера полостей различных размеров, в том числе размеров ниже разрешающей способности сигналов обнаружения. При применении для определения размера альвеол разрешающая способность сигналов обнаружения обычно больше, чем размер одиночной альвеолы. В таких случаях одиночный воксел изображения, реконструированного из сигналов обнаружения, охватывает группу альвеол.
Областями применения, помимо медицинских применений для определения размера альвеол пациента, являются производственные технологии, например, для определения размера полостей в заготовке (например, в пене), чтобы подтвердить, что средний размер полостей лежит ниже заданного порога или что максимальный размер не превышается. Другим применением должно быть определение, насколько компактно упакован рассыпной товар, например, чтобы выяснить, имеются ли в упаковке большие неиспользуемые области.
Время задержки между получением первых и вторых сигналов обнаружения зависит от вязкости среды внутри полостей и от размера полостей. Для измерений размеров альвеол типичное время задержки составит между 1 и 5 секундами. Однако предпочтительно собирать больше двух наборов сигналов обнаружения с последовательными временными интервалами.
В частности, для определения размера альвеол, предпочтительно, определяется средний размер альвеол. В зависимости от площади исследуемых альвеол, для дифференцирования между здоровыми (малые) и больными (большие) альвеолами для размера альвеол используется соответствующее пороговое значение. Это необходимо, так как размер и появление альвеол внутри легких не постоянны. Такие пороги обычно определяют заранее, предпочтительно, для различных болезней легких. То же самое обычно справедливо для немедицинских применений, где информация о типичных и нетипичных размерах полостей получается для использования при определении типичного порога.
Изобретение может применяться для определения размера полостей различных размеров, в том числе размеров ниже разрешающей способности сигналов обнаружения. При применении для определения размера альвеол разрешающая способность сигналов обнаружения обычно больше, чем размер одиночной альвеолы. В таких случаях одиночный воксел изображения, реконструированного из сигналов обнаружения, охватывает группу альвеол. В варианте изобретения также возможно определение средних значений размеров внутри групп альвеол. Предпочтительно, определение размера производится для всего легкого, но возможно также ограничение определенными областями, например, если существуют области, для которых существует подозрение о присутствии дефектных альвеол.
Областями применения, помимо медицинских применений для определения размера альвеол пациента, являются производственные технологии, например, для определения размера полостей в заготовке (например, в пене), чтобы подтвердить, что средний размер полостей лежит ниже заданного порога или что максимальный размер не превышается. Другим применением должно быть определение, насколько компактно упакован россыпной товар, например, чтобы выяснить, имеются ли в упаковке большие неиспользуемые области.
Существуют многочисленные возможности, предлагаемые для определения размера полости для полостей внутри объекта, например размера альвеол внутри легкого пациента, исходя из первых и вторых сигналов обнаружения. В соответствии с одним вариантом осуществления размер полости для полостей внутри объекта определяется сравнением первого и второго сигналов обнаружения, в частности, для заданных областей в поле зрения. Из определенной разности, например, для интенсивности затухания сигнала и/или времени затухания сигнала, как предложено в соответствии с дополнительными вариантами осуществления, может быть собрана информация о времени прохождения магнитных частиц и/или может быть сделана оценка процента магнитных частиц, которые прикрепились к поверхности легкого (или объекта) после определенного периода времени, позволяя извлекать информацию о размере альвеол (или полостей) и, таким образом, о возможных дефектах легкого.
Предпочтительно, средство обработки выполняется с возможностью генерации изображения на основе затухания интенсивности и/или изображения времени затухания из определенной интенсивности затухания сигнала или определенного времени затухания сигнала, соответственно. Такое изображение обеспечивает и визуально отображает дополнительную информацию, в которой области возможных дефектов легкого (или объекта) больше (или меньше), чем допустимо.
В соответствии с другим вариантом осуществления размер полости для полостей внутри объекта определяется посредством генерации первого изображения и второго изображения из первого и второго сигналов обнаружения, в частности, для заданных областей в поле зрения и для сравнения упомянутых первого и второго изображений. Таким образом, полученные сигналы обнаружения не сравниваются непосредственно, а из них сначала генерируются изображения, которые затем сравниваются. Предпочтительно, на дисплее отображаются изображения, сгенерированные из первого и второго сигналов обнаружения, и их разностное изображение. Также, возможно использовать инструменты распознавания изображения (или структуры), чтобы автоматически находить в изображениях необычные области, в частности, в разностном изображении.
В целом, оба альтернативных варианта осуществления (сначала реконструкция изображений и затем сравнение изображений или генерирование изображения из одного или более времен затухания сигнала или затуханий интенсивности сигнала) одинаково значимы и математически эквивалентны. Для пользователя может быть более понятно сначала генерировать изображения и затем определять из них значимый параметр, например время затухания сигнала. Если сигнал может быть также получен на основе поглощенных частиц, то использование сигналов обнаружения может улучшиться. Поскольку при получениях вторых (и далее) сигналов уже известно, сколько частиц было поглощено, сигнал обнаружения может быть лучше подогнан (используя две системные функции, одну - для частиц в аэрозоле и другую - для поглощенных частиц).
Также возможно определять такие изображения только для заданных областей, в частности, для части или всех легочных альвеол. И еще, дополнительно, если при использовании других способов, например при другом принципе получения изображений или при другом диагностическом инструменте, существует подозрение, что определенная область может иметь нарушения, получение сигналов и/или обработка сигналов могут ограничиваться такой областью, чтобы сэкономить время.
Хотя до сих пор изобретение объяснялось со ссылкой на получение первого и второго сигналов обнаружения, возможно также определять размер полости для полостей внутри объекта, исходя из множества сигналов обнаружения, полученных после вдоха аэрозоля в последующие моменты времени. Это повышает точность восстановленной информации и обеспечивает больше подробностей о размере полости в различных областях, откуда принимаются сигналы обнаружения.
Краткое описание чертежей
Эти и другие варианты изобретения станут понятны и будут объяснены со ссылкой на вариант(-ы) осуществления, описанный здесь далее. На приведенных чертежах
фиг.1 - первый вариант осуществления устройства MPI,
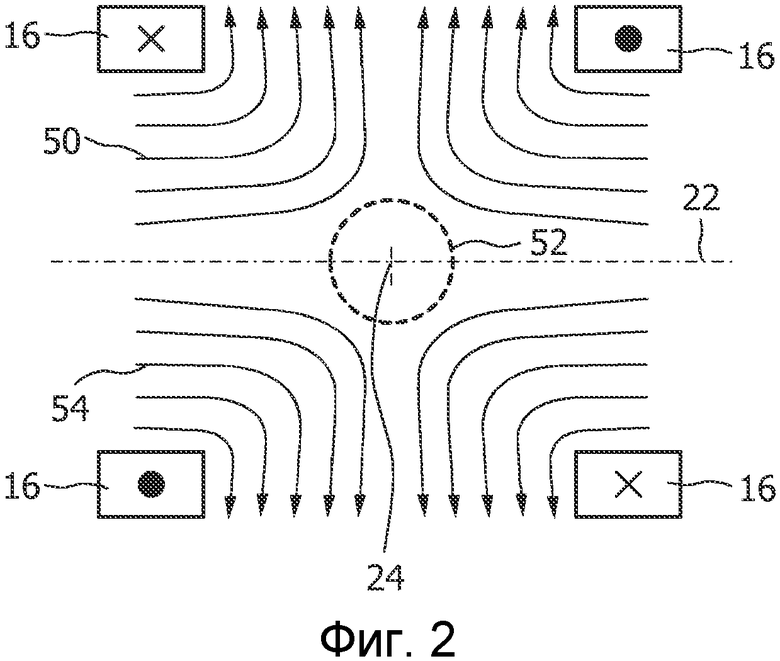
фиг.2 - пример структуры поля выбора, генерируемой устройством, показанным на фиг.1,
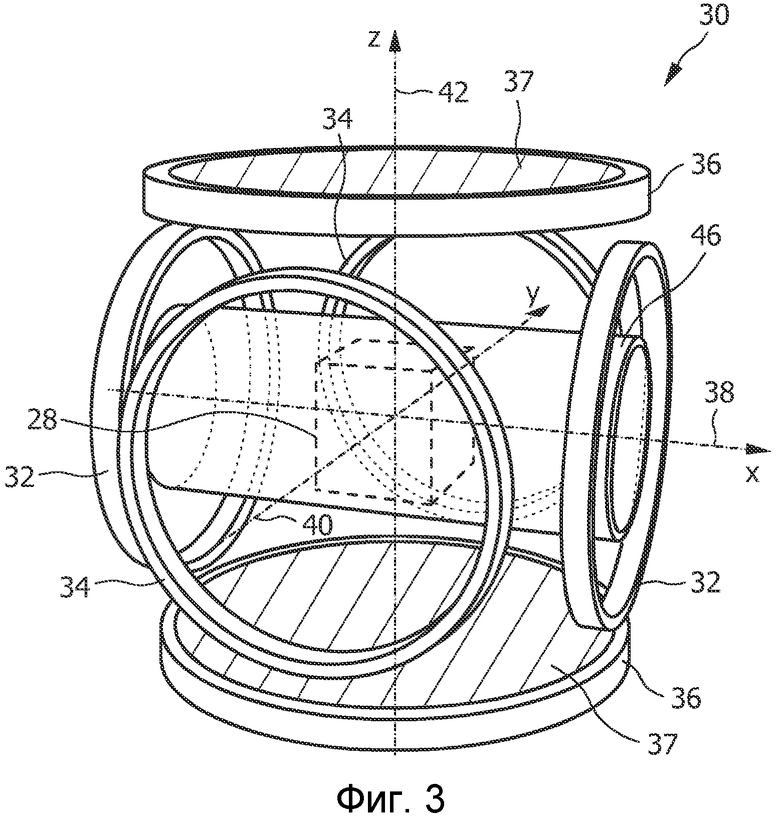
фиг.3 - первый вариант осуществления устройства MPI,
фиг.4 - блок-схема варианта осуществления устройства MPI, соответствующего настоящему изобретению, и
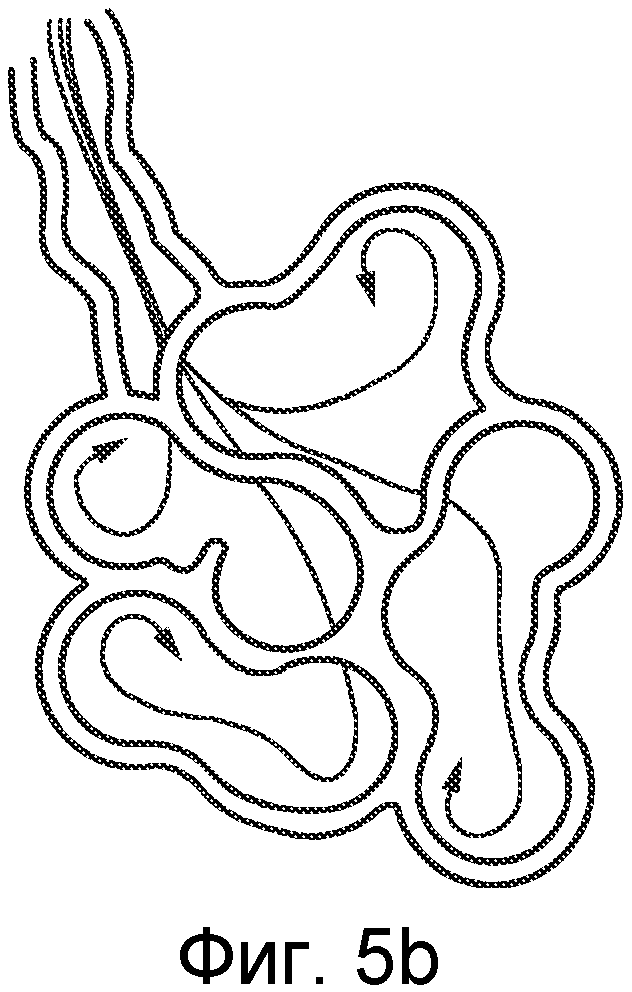
фиг.5 - здоровые альвеолы и эмфизаматические альвеолы.
Подробное описание изобретения
Перед тем, как будут объяснены подробности настоящего изобретения, будут объяснены подробно основы получения изображения с использованием магнитных частиц со ссылкой на фиг.1-4. В частности, будут объяснены два варианта осуществления сканера MPI для медицинской диагностики. Приводится также упрощенное описание сбора данных. Будут указаны сходства и различия между двумя вариантами осуществления.
Первый вариант 10 осуществления сканера MPI, показанного на фиг.1, имеет три хорошо различимых пары 12, 14, 16 коаксиальных параллельных круговых катушек, причем каждая пара установлена так, как показано на фиг.1. Эти три пары катушек 12, 14, 16 служат для генерации поля выбора, а также возбуждающего и фокусирующего полей. Оси 18, 20, 22 трех пар катушек 12, 14, 16 взаимно ортогональны и сходятся в одной точке, обозначенной как изоцентр 24 сканера 10 MPI. Кроме того, эти оси 18, 20, 22 служат в качестве осей трехмерной декартовой системы координат x-y-z, привязанной к изоцентру 24. Вертикальная ось 20 обозначается как ось y, а оси x и z являются горизонтальными осями. Пары катушек 12, 14, 16 также именуются в соответствии со своими осями. Например, пара 14 y-катушек образуется катушками наверху и внизу сканера. Кроме того, катушка с положительной (отрицательной) y-координатой называется y+-катушкой (y--катушкой) и аналогично называются остальные катушки.
Сканер 10 может быть настроен так, чтобы направлять заданный, зависящий от времени электрический ток через каждую из этих катушек 12, 14, 16 в одном и другом направлении. Если ток проходит по катушке в направлении по часовой стрелке, когда смотрят вдоль оси этой катушки, он будет считаться положительным, в противном случае - ток отрицательный. Для генерации статического поля выбора генерируется постоянный положительный ток IS, чтобы проходить через z+-катушку, и ток -IS, чтобы проходить через z--катушку. Пара 16 z-катушек затем действует как антипараллельная пара круговых катушек.
Магнитное поле выбора, которое обычно является градиентным магнитным полем, представлено на фиг.2 с помощью силовых линий 50. Оно имеет, по существу, постоянный градиент в направлении (например, горизонтальной) z-оси 22 пары 16 z-катушек, генерируя поле выбора, и достигает нулевого значения в изоцентре 24 на этой оси 22. Начиная с этой точки, свободной от поля (не показана отдельно на фиг.2), напряженность поля магнитного поля 50 выбора увеличивается во всех трех пространственных направлениях по мере увеличения расстояния от точки, свободной от поля. В первой субзоне 52 или области 52, которая обозначается пунктирной линией вокруг изоцентра 24, напряженность поля настолько мала, что намагничивание частиц, присутствующих в этой первой субзоне 52, не достигает насыщения, тогда как намагничивание частиц, присутствующих во второй субзоне 54 (за пределами области 52), соответствует состоянию насыщения. Точка, свободная от поля, или первая субзона 52 поля 28 зрения сканера предпочтительно является пространственно когерентной областью; она может также быть точечной областью, линейной или плоской областью. Во второй субзоне 54 (то есть в остаточной части поля 28 зрения сканера за пределами первой субзоны 52) напряженность магнитного поля выбора достаточно велика, чтобы поддерживать магнитные частицы в состоянии насыщения.
Изменяя положение двух субзон 52, 54 в поле 28 зрения, изменяется (общее) намагничивание в поле 28 зрения. Измеряя намагничивание в поле 28 зрения или физические параметры под действием намагничивания, можно получить информацию о пространственном распределении магнитных частиц в поле 28 зрения. Чтобы изменить относительное пространственное положение двух субзон 52, 54 в поле 28 зрения, дополнительные магнитные поля, то есть возбуждающее магнитное поле и, если применяется, фокусирующее магнитное поле, накладываются на поле 50 выбора в поле 28 зрения или, по меньшей мере, в части поля 28 зрения.
Чтобы сгенерировать возбуждающее поле, генерируются зависящий от времени ток ID 1, который проходит через обе x-катушки 12, зависящий от времени ток ID 2 через обе y-катушки 14 и зависящий от времени ток ID 3 через обе z-катушки 16. Таким образом, каждая из трех пар катушек действует как параллельная пара круговых катушек. Аналогично, чтобы сгенерировать фокусирующее поле, генерируются зависящий от времени ток IF 1, который проходит через обе x-катушки 12, зависящий от времени ток IF 2 через обе y-катушки 14 и зависящий от времени ток IF 3 через обе z-катушки 16.
Следует заметить, что пара 16 z-катушек является особенной: она генерирует не только свою долю возбуждающего и фокусирующего полей, но также и поле выбора. Ток, проходящий через катушку z±, равен ID 3+IF 3+IS. Ток, проходящий через остальные две пары 12, 14 катушек, равен ID k+IF k, k=1, 2. Благодаря их геометрии и симметрии три пары 12, 14, 16 катушек хорошо развязаны. Это является желательным.
Генерируемое антипараллельной парой круговых катушек поле выбора является вращательно-симметричным относительно z-оси, и его z-составляющая является примерно линейной по z и независимой от x и y в значительном объеме вокруг изоцентра 24. В частности, поле выбора имеет единую свободную от поля точку (FFP) в изоцентре. Напротив, вклады, вносимые в возбуждающее и фокусирующее поля, которые генерируются параллельными парами круговых катушек, являются пространственно почти однородными в значительном объеме вокруг изоцентра и параллельны оси соответствующей пары катушек. Возбуждающие и фокусирующие поля, совместно генерируемые всеми тремя параллельными парами круговых катушек, пространственно почти однородны и могут генерировать любое направление и напряженность, вплоть до некоторой максимальной напряженности. Возбуждающие и фокусирующие поля также зависят от времени. Разница между фокусирующим полем и возбуждающим полем состоит в том, что фокусирующее поле изменяется медленно во времени и имеет большую амплитуду, тогда как возбуждающее поле изменяется быстро и имеет малую амплитуду. Существуют физические и биомедицинские причины по-разному обращаться с этими полями. Быстро изменяющееся поле с большой амплитудой может иметь трудности при его генерации и быть опасным для пациента.
Вариант 10 осуществления сканера MPI имеет, по меньшей мере, одну дополнительную пару, предпочтительно, три дополнительных пары параллельных круговых катушек, также ориентированных вдоль осей x, y, z. Эти пары катушек, которые не показаны на фиг.1, служат в качестве приемных катушек. Как и для пар 12, 14, 16 катушек для возбуждающих и фокусирующих полей, магнитное поле, генерируемое постоянным током, проходящим через одну из этих пар приемных катушек, является пространственно почти однородным в пределах поля зрения и параллельным оси соответствующей пары катушек. Приемные катушки предполагаются хорошо развязанными между собой. Зависящее от времени напряжение, индуцированное в приемной катушке, усиливается и оцифровывается приемником, присоединенным к этой катушке. Более точно, чтобы справиться с огромным динамическим диапазоном этого сигнала, приемник делает выборки разности между принятым сигналом и опорным сигналом. Передаточная функция приемника является ненулевой от постоянного тока до точки, в которой ожидаемый уровень сигнала падает ниже уровня шума.
Вариант 10 осуществления сканера MPI, показанного на фиг.1, имеет цилиндрическое отверстие 26 вдоль z-оси 22, то есть вдоль оси поля выбора. Все катушки располагаются снаружи этого отверстия 26. Для сбора данных пациент или объект, изображение которого должно быть получено (или который должен подвергнуться лечению), помещается в отверстие 26 так, что интересующий объем пациента - тот объем пациента (или объекта), изображение которого должно быть получено (или который должен быть подвергнут лечению), - ограничивается полем 28 зрения сканера, тем объемом сканера, изображение содержания которого сканер может получить. Пациент (или объект) помещается, например, на стол для пациента. Поле 28 зрения является геометрически простым, изоцентрическим объемом внутри отверстия 26, таким как куб, шар или цилиндр. Кубическое поле 28 зрения показано на фиг.1.
Размер первой субзоны 52 зависит, с одной стороны, от градиента напряженности магнитного поля выбора и, с другой стороны, от напряженности магнитного поля, требуемой для насыщения. Для достаточного насыщения магнитных частиц при напряженности магнитного поля 80 A/м и градиенте (в данном пространственном направлении) напряженности поля магнитного поля выбора, достигающем 50×103 A/м2, первая субзона 52, в которой намагничивание частиц не доходит до насыщения, имеет размеры приблизительно 1 мм (в заданном пространственном направлении).
Интересующий объем пациента предполагается содержащим магнитные наночастицы. Особенно перед терапевтическим и/или диагностическим лечением, например опухоли, магнитные частицы располагаются в интересующем объеме, например, посредством жидкости, содержащей магнитные частицы, которая инжектируется в тело пациента (объекта) или вводится пациенту как-либо иначе, например орально.
Вариант осуществления магнитных частиц содержит, например, сферический субстрат, например стекло, который покрывается слоем мягкого магнитного материала, имеющего толщину, например, 5 нм, и состоит, например, из железо-никелевого сплава (например, пермаллоя). Этот слой может иметь покрытие, например, посредством нанесения слоя покрытия, защищающего частицу от химически и/или физически агрессивных сред, например от кислот. Напряженность магнитного поля для магнитного поля 50 выбора, требующаяся для насыщения при намагничивании таких частиц, зависит от различных параметров, например, от диаметра частиц, используемого магнитного материала для магнитного слоя и других параметров.
В случае, например, диаметра 10 мкм требуется магнитное поле приблизительно 800 A/м (приблизительно соответствующее магнитной индукции 1 мТ), тогда как в случае диаметра 100 мкм достаточно магнитное поле 80 А/м. Еще меньшие значения получаются, когда выбирается покрытие материалом, имеющим более низкое намагничивание насыщения, или когда уменьшается толщина слоя. Магнитные частицы, которые обычно используются, доступны на рынке под торговым названием "резовист" (Resovist).
Дополнительные подробности обычно используемых магнитных частиц и смесей частиц упоминаются здесь как соответствующие части документов EP 1304542, WO 2004/091386, WO 2004/091390, WO 2004/091394, WO 2004/091395, WO 2004/091396, WO 2004/091397, WO 2004/091398, WO 2004/091408, которые введены сюда посредством ссылки. В этих документах можно также найти дополнительные подробности по способу MPI.
Сбор данных начинается в момент времени ts и заканчивается в момент времени te. Во время сбора данных пары 12, 14, 16 x-, y-, z-катушек генерируют зависящее от положения и от времени магнитное поле, то есть приложенное поле. Это достигается соответственно направленными токами, проходящими через катушки. Фактически, возбуждающее и фокусирующее поля превалируют над полем выбора, так что FFP движется вдоль заранее выбранной траектории FFP, которая очерчивает объем сканирования - супернабор поля зрения. Приложенное поле ориентирует магнитные наночастицы в пациенте. По мере того как приложенное поле изменяется, также изменяется результирующее намагничивание, хотя оно реагирует на приложенное поле нелинейно. Совокупность изменяющегося приложенного поля и изменяющегося намагничивания наводит зависящее от времени напряжение Vk на выводах пары приемных катушек вдоль xk-оси. Соответствующий приемник преобразует это напряжение в сигнал Sk(t), который он оцифровывает и выводит.
Предпочтительно, чтобы прием или обнаружение сигналов от магнитных частиц, расположенных в первой субзоне 52, производились в полосе частот (смещенной в область более высоких частот), отличной от полосы частот изменений возбуждающего магнитного поля. Это возможно, потому что из-за изменения намагничивания магнитных частиц в поле зрения сканера в результате нелинейности характеристик намагничивания возникают частотные составляющие высших гармоник частоты возбуждающего магнитного поля.
Подобно первому варианту 10 осуществления, показанному на фиг.1, второй вариант 30 изобретения сканера MPI, показанный на фиг.3, имеет три круговые и взаимно-ортогональные пары 32, 34, 36 катушек, но эти пары 32, 34, 36 катушек генерируют только поле выбора и фокусирующее поле. Z-катушки 36, которые, опять же, генерируют поле выбора, заполнены ферромагнитным материалом 37. Z-ось 42 в этом варианте 30 осуществления ориентируется вертикально, тогда как x- и y-оси 38, 40 ориентируются горизонтально. Отверстие 46 сканера параллельно x-оси 38 и, таким образом, перпендикулярно оси 42 поля выбора. Возбуждающее поле генерируется соленоидом (не показан) вдоль x-оси 38 и парами седловидных катушек (не показаны) вдоль двух остальных осей 40, 42. Эти катушки наматываются вокруг трубки, которая формирует отверстие. Катушки возбуждающего поля также служат в качестве приемных катушек. Сигналы, принятые приемными катушками, пропускаются через фильтр верхних частот, который подавляет составляющие, вызванные приложенным полем.
Приведем несколько типичных примеров такого варианта осуществления: Z-градиент поля выбора, G, имеет напряженность G/µ0=2,5 T/м, где µ0 - магнитная проницаемость в вакууме. Сгенерированное поле выбора либо не изменяется вообще во времени, либо изменяется сравнительно медленно, предпочтительно приблизительно с частотой между 1 Гц и приблизительно 100 Гц. Временной частотный спектр возбуждающего поля сосредоточен в узкой полосе вокруг 25 кГц (до приблизительно 100 кГц). Полезный частотный спектр принятого сигнала лежит между 50 кГц и 1 МГц (в конечном счете, до приблизительно 10 МГц). Отверстие имеет диаметр 120 мм. Наибольший куб 48, который входит в отверстие 46, имеет длину ребра 120 мм/√2≈84 мм.
Как показано выше, в описанных вариантах изобретения различные магнитные поля могут генерироваться катушками одних и тех же пар катушек, и эти катушки могут обеспечиваться соответственно сгенерированными токами. Однако, и специально для цели интерпретации сигналов с более высоким отношением сигнал/шум, может быть предпочтительным, когда временное постоянное (или квазипостоянное) поле выбора (также называемое градиентным магнитным полем) и временное переменное возбуждающее магнитное поле и фокусирующее поле генерируются отдельными парами катушек. Обычно, для этих катушек могут использоваться пары катушек типа катушек Гельмгольца, которые хорошо известны, например, из области устройств с магнитным резонансом с открытыми магнитами (открытая MRI), в которых высокочастотная (RF) пара катушек располагается выше и ниже интересующей области, причем упомянутая пара высокочастотных катушек способна генерировать изменяющееся во времени магнитное поле. Поэтому конструкция таких катушек не требует здесь дополнительного разъяснения.
В альтернативном варианте осуществления для генерации поля выбора могут использоваться постоянные магниты (не показаны). В пространстве между двумя полюсами таких (противоположных) постоянных магнитов (не показаны) формируется магнитное поле, подобное показанному на фиг.2, то есть в котором противоположные полюса имеют одну и ту же полярность. В другом альтернативном варианте осуществления поле выбора может генерироваться комбинацией, по меньшей мере, одного постоянного магнита и, по меньшей мере, одной катушки.
На фиг.4 представлена обобщенная блок-схема устройства 100 MPI, соответствующего настоящему изобретению. Общие принципы получения изображения с использованием магнитных частиц и магнитно-резонансной томографии, объясненные выше, остаются также верными и применимы также к этому варианту осуществления, если не указано что-либо другое.
Вариант устройства 100, показанный на фиг.4, содержит набор различных катушек для генерации желаемых магнитных полей. Сначала будут объяснены катушки и их функции в режиме MPI.
Для генерации магнитного (градиентного) поля выбора, объясненного выше, обеспечиваются средства выбора, содержащие набор 116 катушек поля выбора (SF), предпочтительно содержащий, по меньшей мере, одну пару элементов катушек. Средство выбора дополнительно содержит блок 110 генератора сигнала поля выбора. Предпочтительно, отдельный субблок генератора обеспечивается для каждого элемента катушки (или каждой пары элементов катушек) набора 116 катушек поля выбора. Упомянутый блок 110 генератора сигнала поля выбора содержит управляемый источник 112 тока поля выбора (обычно содержащий усилитель) и блок 114 фильтра, которые питает соответствующий элемент катушки поля выбора током поля выбора, чтобы индивидуально установить градиентную напряженность поля выбора в желаемом направлении. Предпочтительно, подается постоянный ток. Если элементы катушки поля выбора установлены как противоположно расположенные катушки, например на противоположных сторонах поля зрения, токи поля выбора противоположных катушек предпочтительно ориентируются противоположно.
Блок 110 генератора сигнала поля выбора управляется блоком 150 управления, который предпочтительно управляет генерированием 110 тока поля выбора так, чтобы сумма напряженностей полей и сумма градиентной напряженности всех пространственных составляющих поля выбора поддерживалась на заданном уровне.
Для генерации фокусирующего магнитного поля устройство 100 дополнительно содержит средство фокусировки, содержащее набор катушек фокусирующего поля (FF), предпочтительно содержащий три пары 126a, 1263b, 126c противоположно расположенных элементов катушек фокусирующего поля. Упомянутое магнитное фокусирующее поле обычно используется для изменения положения области действия в пространстве. Катушки фокусирующего поля управляются блоком 120 генератора сигнала фокусирующего поля, предпочтительно содержащим отдельный субблок генерации сигнала фокусирующего поля для каждого элемента катушки (или, по меньшей мере, для каждой пары элементов катушек) упомянутого набора катушек фокусирующего поля. Упомянутый блок 120 генератора сигнала фокусирующего поля содержит источник 122 тока фокусирующего поля (предпочтительно содержащий усилитель тока) и блок 124 фильтра для подачи тока фокусирующего поля в соответствующую катушку упомянутого субнабора катушек 126a, 126b, 126c, которые должны использоваться для генерации фокусирующего магнитного поля. Источник 120 тока фокусирующего поля также управляется блоком 150 управления.
Для генерации фокусирующего магнитного поля устройство 100 дополнительно содержит средство возбуждения, содержащее субнабор катушек возбуждающего поля (DF), предпочтительно содержащий три пары 136a, 136b, 136c противоположно расположенных элементов катушек возбуждающего поля. Катушки возбуждающего поля управляются блоком 130 генератора сигнала возбуждающего поля, предпочтительно содержащего отдельный субблок генерации сигнала возбуждающего поля для каждого элемента катушки (или, по меньшей мере, для каждой пары элементов катушек) упомянутого набора катушек возбуждающего поля. Упомянутый блок 130 генератора сигнала возбуждающего поля содержит источник 41 тока возбуждающего поля (предпочтительно, содержащий усилитель тока) и блок 42 фильтра для обеспечения подачи тока возбуждающего поля в соответствующую катушку возбуждающего поля. Источник 41 тока возбуждающего поля выполнен с возможностью генерации переменного тока и также управляется блоком 150 управления.
Для обнаружения сигнала обеспечиваются приемное средство 148, в частности приемная катушка, и блок 140 приема сигнала, который принимает сигналы, обнаруженные упомянутым приемным средством 148. Упомянутый блок 140 приема сигнала содержит блок 142 фильтра для фильтрации принятых сигналов обнаружения. Цель этой фильтрации состоит в том, чтобы отделить измеренные значения, которые вызваны намагничиванием в области исследования, на которые влияют изменения в положении этих двух частей-областей (52, 54), от других помеховых сигналов. С этой целью блок 142 фильтра может быть разработан, например, так, чтобы сигналы, имеющие временные частоты, которые меньше, чем временные частоты, с которыми работает приемная катушка 148, или меньшие, чем эти удвоенные временные частоты, не проходили через блок 142 фильтра. Сигналы затем проходят через блок 144 усилителя на аналогово-цифровой преобразователь 146 (ADC). Оцифрованные сигналы, сгенерированные аналогово-цифровым преобразователем 146, подаются на блок 152 обработки изображений (также называемый средством реконструкции), который реконструирует пространственное распределение магнитных частиц из этих сигналов и соответствующего положения, которые первая часть-область 52 первого магнитного поля в области исследования принимала во время приема соответствующего сигнала и которые блок 152 обработки изображений получает от блока 150 управления. Реконструированное пространственное распределение магнитных частиц наконец передается через средство 150 управления на компьютер 154, который отображает его на мониторе 156. Таким образом, изображение может отображаться, показывая распределение магнитных частиц в поле зрения области исследования.
Дополнительно обеспечивается блок 158 ввода, например, клавиатура. Пользователь поэтому способен установить требуемое направление с самой высокой разрешающей способностью и, в свою очередь, принимает соответствующее изображение поля зрения на мониторе 156. Если критическое направление, в котором необходима самая высокая разрешающая способность, отклоняется от направления, установленного пользователем вначале, пользователь все еще может изменять направление вручную, чтобы сгенерировать дополнительное изображение с повышенной разрешающей способностью при получении изображения. Этот процесс повышения разрешающей способности может также управляться автоматически с помощью блока 150 управления и компьютера 154. Блок 150 управления в этом варианте осуществления устанавливает градиентное поле в первом направлении, которое автоматически оценивается или устанавливается пользователем в качестве начального значения. Направление градиентного поля затем ступенчатое изменяется, пока разрешающая способность полученных таким образом изображений, которые сравниваются компьютером 154, не станет максимальной, соответственно, больше не улучшаясь. Самое критическое направление, поэтому, может быть найдено автоматически посредством соответствующей адаптации, чтобы получить максимально возможную разрешающую способность.
Ниже будут объяснены подробности настоящего изобретения, основываясь на варианте осуществления для определения (или, по меньшей мере, оценки) альвеол в легком пациента. Изобретение, однако, никак не ограничивается ни таким вариантом осуществления, ни определением размера альвеол.
Для определения размера альвеол пациента, вдохнувшего аэрозоль, содержащий магнитные частицы, компьютер (или, в более общем смысле, средство обработки) 154 выполнен с возможностью определения размера альвеол из первых сигналов обнаружения, полученных сразу после вдоха аэрозоля, и вторых сигналов обнаружения, полученных после продолжительности времени после вдоха аэрозоля. Блок 150 управления, таким образом, управляет различными средствами 110, 120, 130 генерации сигналов для генерации и обеспечения подачи соответствующих управляющих токов в соответствующие катушки 116, 126, 136 так, чтобы они генерировали магнитные поля, посредством которых свободная от поля точка (FFP) 52 (то есть первая субобласть) перемещается вдоль заданной траектории через интересующую область в поле 28 зрения. Во время этого перемещения FFP 52 принимаются сигналы обнаружения, которые далее обрабатываются и оцениваются компьютером 154. Это перемещение FFP производится, по меньшей мере, дважды, предпочтительно вдоль той же самой траектории, и сигналы обнаружения получаются, по меньшей мере, дважды от одной и той же интересующей области (и, предпочтительно, от одних и тех же мест внутри интересующей области). Таким образом, первое перемещение FFP и получение сигнала происходит сразу же или вскоре (обычно, не более чем через 5 секунд) после вдыхания аэрозоля, а второе перемещение FFP и получение сигнала происходит через короткое время (например, 1-5 секунд) после первого перемещения FFP и получения сигнала. Предпочтительно, получение сигнала начинается уже во время вдоха, и первый набор данных (или изображение, реконструированное из него) используется в качестве первого (опорного) набора данных. Для получения полного набора данных обнаруженных сигналов от легкого должно быть достаточно 0,5-1 секунды.
Изобретение основано на идее, что аэрозоль, который вдохнули, содержит очень мелкодисперсные магнитные наночастицы, которые способны диффундировать внутрь альвеол после вдоха. Если они достигают поверхности альвеол, они остаются прикрепленными к поверхности и имеют пониженную вязкость по сравнению с предыдущим состоянием, когда они диффундировали внутрь альвеол. Это, однако, означает, что от магнитных частиц, прикрепленных к поверхности альвеол, получается меньший сигнал обнаружения (и обнаруживаемый приемной катушкой 148) по сравнению с магнитными частицами, которые свободно диффундируют внутри альвеол, от которых может быть получен больший сигнал обнаружения.
Этот принцип используется в соответствии с настоящим изобретением, оценивая, по меньшей мере, два набора сигналов обнаружения, собранных в разные моменты времени после вдоха магнитных частиц. Поскольку вторые сигналы обнаружения требуются, когда, по меньшей мере, часть магнитных частиц уже прикреплена к поверхности альвеол, ожидаются более низкие интенсивности сигналов. Величина падения интенсивности сигналов и/или время затухания сигнала зависит от размера альвеол. В частности, если альвеолы увеличены, как в случае эмфиземы, проходит больше времени, пока магнитные частицы диффундируют до поверхности альвеол, тогда как для альвеол меньшего размера (здоровых) это время короче. Другими словами, если существует большая диффузия и большое время затухания сигнала, это является признаком увеличенных альвеол и, таким образом, эмфиземы.
Компьютер 154, таким образом, выполнен с возможностью соответственной оценки полученных сигналов обнаружения, например, путем сравнения сигналов обнаружения, в частности, времени затухания сигналов и/или интенсивности сигналов. Также возможно определять изображения из обоих наборов сигналов обнаружения отдельно и после этого генерировать разностное изображение, которое может давать информацию об областях с дефектными альвеолами.
Как упоминалось, изобретение может применяться для определения, имеется ли эмфизема. Как показано на фиг.5, эмфиземные альвеолы (фиг.5b) увеличены по сравнению со здоровыми альвеолами (фиг.5а).
Изобретение дополнительно может применяться для определения, страдает ли пациент астмой, при которой дыхательные пути легкого воспалены (распухшие), или страдает ли он хроническим обструктивным заболеванием легких (COPD), при котором дыхательные пути и альвеолярные мешочки теряют свою эластичность, стенки между многими альвеолярными мешочками разрушаются, стенки воздушных путей становятся толстыми и воспаленными (распухшими), и/или воздушные пути становятся более слизистыми, чем обычно, что ведет к закупориванию воздушных путей.
Используя настоящее изобретение, возможно, таким образом, прежде всего, получить информацию о среднем размере ячеистых структур, подобных альвеолам, которые могут давать признаки COPD. Вместе с дополнительной информацией об областях с пониженной или задержанной вентиляцией, которые могут не демонстрировать увеличенных альвеол, или о движении профилей легкого, например, чтобы видеть затвердевания, полученные другими способами, это позволяет улучшить диагностику или управление терапией. Наиболее существенный эффект настоящего изобретения, таким образом, состоит в обеспечении способности определять (средний) размер альвеол или, в более общем смысле, полостей в объекте.
Хотя в самом простом варианте осуществления требуются два набора сигналов обнаружения, следующих друг за другом после вдоха аэрозоля (каждый набор данных собирается во время перемещения FFP вдоль траектории), также возможно принимать больше наборов сигналов обнаружения в последующие времена, например, 10 сигналов обнаружения, когда сигнал обнаружения принимается каждые 200 мс. Это обеспечивает больше информации и повышает точность достигнутых результатов.
Аэрозоль, содержащий (очень) мелкодисперсные магнитные частицы, может генерироваться посредством процесса распыления. В идеале, существуют только отдельные частицы. Поэтому могут использоваться устройства высокого давления или электрораспылительные механизмы. Чтобы помочь формированию мелкодисперсных частиц, предпочтительно, при использовании достаточно низкой начальной концентрации частиц, чтобы в одной капле присутствовала только одна частица. Далее, вода выпаривается, используя смешивание с сухим воздухом и нагревание до температуры тела. Чтобы получить тонкодисперсную струю, количество воздуха, необходимое для выпаривания, может привести к слишком низкой концентрации частиц. Эта проблема может быть решена путем концентрации аэрозольных частиц во вращающихся воздушных вихрях с помощью центробежных сил.
Коэффициент наблюдаемой диффузии предпочтительно вычисляется, используя компьютерную программу, оценивающую полученные сигналы обнаружения, например, затухание и изменение сигналов обнаружения в воздушном пространстве. Альтернативно, постоянная времени затухания сигнала может быть представлена непосредственно графически.
Как показано выше, настоящее изобретение предлагается использовать для измерения вентиляции. Чтобы получить оценку диффузии в легких, пациент должен вдыхать аэрозоль суспензии магнитных частиц, в частности, нанострую. Используя подходящие магнитные частицы, может быть представлено изображение различия в характерных особенностях аэрозоля и поглощенных частиц. Коэффициент наблюдаемой диффузии вычисляется, оценивая сигналы обнаружения, полученные последовательно после вдоха аэрозоля. Например, может быть определена постоянная времени для поглощения частиц в ткани легкого.
Хотя изобретение было представлено и подробно описано на чертежах и в предшествующем описании, такие представление и описание следует считать иллюстративными или примерами, не создающими ограничений; изобретение не ограничивается раскрытыми вариантами осуществления. При осуществлении заявленного изобретения, исходя из изучения чертежей, раскрытия и приложенной формулы изобретения, специалистами в данной области техники в дополнение к раскрытым вариантам осуществления могут быть предложены и осуществлены другие варианты.
В формуле изобретения слово "содержащее" не исключает другие элементы или этапы, и единственное число не исключает множественного числа. Один элемент или другой блок могут выполнить функции нескольких позиций, упомянутых в формуле изобретения. Простой факт, что определенные критерии повторяются во взаимнозависимых разных пунктах формулы изобретения, не указывает, что комбинация этих критериев не может использоваться для достижения преимущества.
Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничение ее объема.


Изобретение относится к медицинской технике, а именно к средствам определения размеров полостей, в частности легочных альвеол пациента. Устройство определения размера полости, в которую введен аэрозоль, содержащий магнитные частицы, содержит средство выбора, содержащее блок генератора сигнала поля выбора и элементы генерации поля выбора для генерации магнитного поля выбора, имеющего такую пространственную структуру напряженности магнитного поля, что в поле зрения формируются первая субзона, имеющая низкую напряженность магнитного поля, и вторая субзона, имеющая более высокую напряженность магнитного поля, средство возбуждения, содержащее блоки генератора сигнала возбуждающего поля и катушки возбуждающего поля для изменения положения в пространстве двух субзон, приемное средство, содержащее, по меньшей мере, один блок приема сигнала и, по меньшей мере, одну приемную катушку для получения сигналов обнаружения, и средство обработки для определения размера полости. Способ определения размера полости состоит в использовании устройства. Использование изобретения позволяет повысить разрешающую способность сигналов обнаружения. 2 н. и 10 з.п. ф-лы, 5 ил.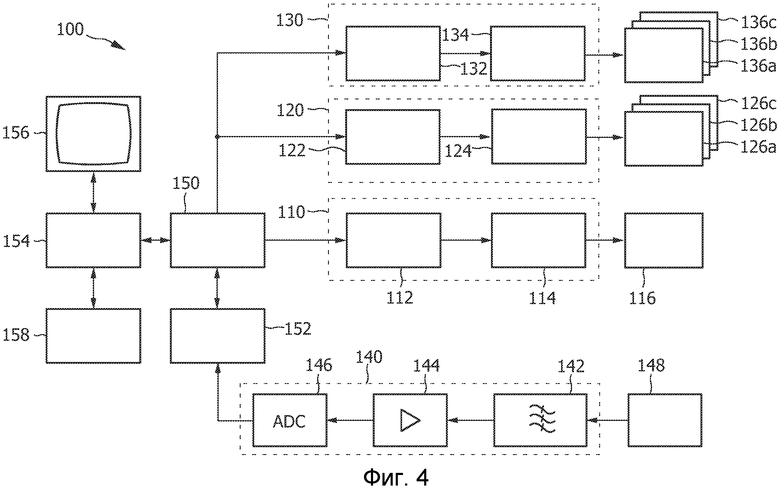
1. Устройство (100) для определения размера полости для полостей внутри объекта, в который введен аэрозоль, содержащий магнитные частицы, причем упомянутое устройство содержит:
средство выбора, содержащее блок (110) генератора сигнала поля выбора и элементы (116) генерации поля выбора для генерации магнитного поля (50) выбора, имеющего такую пространственную структуру напряженности магнитного поля, что в поле (28) зрения формируются первая субзона (52), имеющая низкую напряженность магнитного поля, и вторая субзона (54), имеющая более высокую напряженность магнитного поля,
средство возбуждения, содержащее блоки (130) генератора сигнала возбуждающего поля и катушки (136а, 136b, 136с) возбуждающего поля для изменения положения в пространстве двух субзон (52, 54) в поле (28) зрения посредством возбуждающего магнитного поля так, чтобы намагничивание магнитного материала локально изменялось,
приемное средство, содержащее, по меньшей мере, один блок (140) приема сигнала и, по меньшей мере, одну приемную катушку (148) для получения сигналов обнаружения, причем сигналы обнаружения зависят от намагничивания в поле зрения (28), и на намагничивание влияют изменения положения первой и второй субзон (52, 54) в пространстве, и
средство (154) обработки для определения размера полости для полостей внутри объекта из первых сигналов обнаружения, полученных непосредственно после введения аэрозоля, и вторых сигналов обнаружения, полученных после продолжительности времени после введения аэрозоля.
2. Устройство (100) по п. 1,
в котором упомянутое средство (154) обработки выполнено с возможностью определения размера полости для полостей внутри объекта посредством сравнения первого и второго сигналов обнаружения, в частности, для заданных областей в поле (28) зрения.
3. Устройство (100) по п. 2,
в котором упомянутое средство (154) обработки выполнено с возможностью определения размера полости для полостей внутри объекта посредством определения интенсивности затухания сигнала в результате сравнения первого и второго сигналов обнаружения, в частности, для заданных областей в поле (28) зрения.
4. Устройство (100) по п. 2,
в котором упомянутое средство (154) обработки выполнено с возможностью определения размера полости для полостей внутри объекта посредством определения времени затухания сигнала в результате сравнения первого и второго сигналов обнаружения, в частности, для заданных областей в поле (28) зрения.
5. Устройство (100) по п. 3 или 4,
в котором упомянутое средство (154) обработки выполнено с возможностью генерации изображения затухания интенсивности и/или изображения времени затухания из определенной интенсивности затухания сигнала или определенного времени затухания сигнала, соответственно.
6. Устройство (100) по п. 1,
в котором упомянутое средство (154) обработки выполнено с возможностью определения размера полости для полостей внутри объекта посредством генерации первого изображения и второго изображения из первого и второго сигналов обнаружения, в частности, для заданных областей в поле (28) зрения, и сравнения упомянутых первого и второго изображений.
7. Устройство (100) по п. 6,
в котором упомянутое средство (154) обработки выполнено с возможностью генерации разностного изображения из зависящего от положения результата вычитания между первым изображением и вторым изображением, в частности, для заданных областей в поле (28) зрения.
8. Устройство (100) по любому из пп. 2-4 или 6-7,
в котором упомянутые заданные области являются одиночными полостями или группой полостей.
9. Устройство (100) по п. 5,
в котором упомянутые заданные области являются одиночными полостями или группой полостей.
10. Устройство (100) по п. 1,
в котором упомянутое средство (154) обработки выполнено с возможностью определения размера полости для полостей внутри объекта из множества сигналов обнаружения, полученных после введения аэрозоля в последовательные моменты времени.
11. Устройство (100) по п. 1,
дополнительно содержащее аэрозольный генератор для генерации аэрозоля, содержащего магнитные частицы, в частности, чтобы выделять магнитные частицы в аэрозоле.
12. Способ определения размера полости для полостей внутри объекта, в который введен аэрозоль, содержащий магнитные частицы, причем способ содержит этапы, на которых:
генерируют магнитное поле (50) выбора, обладающее такой пространственной структурой напряженности магнитного поля, что в поле (28) зрения формируются первая субзона (52), имеющая низкую напряженность магнитного поля, и вторая субзона (54), имеющая более высокую напряженность магнитного поля, посредством средства выбора, содержащего блок (110) генератора сигнала поля выбора и элементы (116) генерации поля выбора,
изменяют положение в пространстве двух субзон (52, 54) в поле (28) зрения посредством возбуждающего магнитного поля так, чтобы намагничивание магнитного материала локально изменялось средством возбуждения, содержащим блоки (130) генератора сигнала возбуждающего поля и катушки (136а, 136b, 136с) возбуждающего поля,
получают сигналы обнаружения, которые зависят от намагниченности в поле (28) зрения, в котором на намагниченность оказывает влияние изменение положения в пространстве первой и второй субзон (52, 54), приемным средством, содержащим, по меньшей мере, один блок (140) приема сигнала и, по меньшей мере, одну приемную катушку (148), и
определяют размер полости для полостей внутри объекта из первых сигналов обнаружения, полученных непосредственно после введения аэрозоля, и вторых сигналов обнаружения, полученных через продолжительность времени после введения аэрозоля.
| US 2006211939 A1, 21.09.2006 | |||
| US 2006210986 А1, 21.09.2006 | |||
| US 2007258888 A1, 08.11.2007 | |||
| J Weizenecker et al | |||
| Three-dimensional real-time in vivo magnetic particle imaging | |||
| LETTER TO THE EDITOR, 10.02.2009, pp.L1-L10 | |||
| TF Sattel et al | |||
| Single-sided device for magnetic particle imaging | |||
| FAST TRACK COMMUNICATION | |||
| Journal of Physics D: Applied Physics, 42,18.12.2008, pp.1-5 | |||
| СИСТЕМА РАДИОЧАСТОТНЫХ КАТУШЕК ДЛЯ МАГНИТНО-РЕЗОНАНСНОГО ТОМОГРАФА | 2000 |
|
RU2189608C2 |

