Область техники, к которой относится изобретение
Настоящее изобретение относится к области систем с акустическими тактильными датчиками, в частности к сенсорным экранам с поверхностными акустическими волнами, сенсорным мониторам или сенсорным компьютерным устройствам.
Уровень техники
Системы с тактильными датчиками, такие как сенсорные экраны или сенсорные мониторы, могут выступать в качестве устройств ввода для интерактивных компьютерных систем, используемых в таких областях, как информационные киоски, компьютеры, системы обработки заказов в ресторанах, видеодисплеи или указатели ассортимента, мобильные устройства и т.п. Системы с тактильными датчиками или сенсорные экраны могут встраиваться в компьютерные устройства, позволяя в результате получать интерактивные компьютерные устройства, обладающие сенсорной функциональностью, такие как компьютеры, видеодисплеи, указатели ассортимента или мобильные устройства.
Основными технологиями, используемыми в тактильных датчиках, являются резистивная, емкостная и акустическая. Акустические тактильные датчики, такие как ультразвуковые сенсорные датчики, в которых используются поверхностные акустические волны, особенно предпочтительны, когда для определенной области применения требуется тактильная сенсорная поверхность с повышенной прочностью и минимальной оптической деградацией выводимого изображения.
Существует множество типов акустических тактильных датчиков. Например, в одном из типов акустических сенсорных экранов используется тактильная подложка со структурой преобразователей, расположенных вдоль первой периферийной поверхности подложки для одновременного формирования параллельных поверхностно-связанных волн или волн Лэмба, которые направленно распространяются через панель на соответствующую структуру датчиков, расположенных напротив первой структуры, на второй периферийной поверхности подложки. Другая пара структур преобразователей расположена на поверхности подложки под прямыми углами к первому набору. Касание поверхности подложки в определенной точке приводит к затуханию волн, проходящих через точку касания, тем самым, позволяя интерпретировать вывод с двух наборов структур преобразователей для определения координаты касания. Подобный тип позиционного акустического тактильного датчика известен из WO 94/02911 (на имя Тода), который включен здесь по ссылке.
В другом примере акустической системы с тактильными датчиками, получившей название акустический сенсорный экран адлеровского типа, преобразователи используются фактически за счет пространственного распределения сигнала и анализа временных аспектов возмущений, указывающих на их местоположение. Таким образом, обычный прямоугольный сенсорный экран включает в себя два набора преобразователей, у каждого из наборов имеются разные оси, выровненные соответственно с осями физической декартовой системы координат, определяемой подложкой. Акустический импульс или последовательность импульсов, формируемых одним из преобразователей, распространяется, например, в качестве узкой рэлеевской волны вдоль оси, которая пересекается со структурой отражающих элементов, каждый из элементов расположен под углом в 45° и разнесен в зависимости от целого числа длин волн акустического волнового импульса. Каждый отражающий элемент в структуре отражает часть волны вдоль траектории, проходящей перпендикулярно оси, в широкой тактильной области на передней поверхности подложки, выполненной с возможностью определения касания, к противоположной отражающей структуре и преобразователю, который является зеркальным отображением первой структуры и преобразователя, позволяя при этом части волны проходить к следующему отражающему элементу структуры. Преобразователь в структуре, являющейся зеркальным отображением, принимает акустическую волну, состоящую из наложенных частей инкрементально меняющихся волновых частей, отраженных отражающими элементами обоих структур, направленную антипараллельно излучаемому импульсу. Акустические волны подобным образом собираются, сохраняя при этом информацию о временном распределении, которая характеризует координатное положение, из которого произошла затухающая волна. Траектории волн в активной области датчика имеют характерное время задержки, а следовательно, траекторию волны или траектории волн, затухающих в результате касания объектом тактильно-чувствительной области, можно установить путем определения времени затухания композитной возвратной формы волны. Структуры и преобразователи из второго набора расположены под прямыми углами к первому и функционируют аналогично. Поскольку ось преобразователя соответствует физической оси координат подложки, время затухания возвратной волны указывает положение на подложке в декартовой системе координат. В целях определения двухмерного положения в декартовой системе координат объекта, вызвавшего затухания, координаты определяются последовательно. Принцип функционирования системы основан на том, что касание поверхности приводит к затуханию поверхностно-связанных волн или волн Лэмба, обладающих плотностью энергии у поверхности. Затухание волны, проходящей через подложку, приводит к соответствующему затуханию волн, ударяющихся о принимающий преобразователь через определенные промежутки времени. Поэтому контроллеру для определения координатного положения остается определить лишь временные характеристики затухания. Для определения положения в декартовой системе координат измерения осуществляются последовательно по двум осям. Для уменьшения ширины границ в сенсорных экранах адлеровского типа также известно использование направляющего эффекта акустических волн. См. патенты США 4642423; 4644100; 4645870; 4700176; 4746914; Re. 33 151; а также 6636201, каждый из которых включен здесь по ссылке.
Подобные примеры акустических сенсорных систем обычно состоят из большого количества функциональных элементов (либо множества преобразователей, либо преобразователя и отражающей структуры), расположенных на, а также вдоль поверхности подложки. Для предотвращения повреждения из-за воздействия окружающей среды или посторонних предметов, подобные периферийные функциональные элементы убраны и защищены рамкой, расположенной над этими элементами на передней поверхности подложки, а также загерметизированы таким образом, чтобы для возможного тактильного ввода была открыта лишь активная тактильная область на поверхности подложки. Подобные типы акустических тактильных систем также ограничены обработкой тактильных вводов только через активную тактильную область, которая является частью прозрачного тактильного датчика, который наложен на дисплей, расположенный под тактильным датчиком.
На коммерческом рынке сенсорных устройств все большее значение приобретает эстетический внешний вид, а также прочность и надежность функциональных возможностей подобных устройств. Предпринимался ряд попыток, например, по уменьшению размера рамки, расположенной в периферийной части сенсорного экрана подобных устройств. Тем не менее, у сенсорных устройств по-прежнему обычно имеется рамка на передней части устройства, хотя профиль рамки можно уменьшить и/или сделать тоньше ширину границы.
Поэтому желательно получить безрамочные акустические сенсорные системы, которые обладают дополнительной тактильной функциональностью помимо той, что имеется в активной сенсорной области.
Краткое изложение сущности изобретения
По одному из конкретных вариантов осуществления настоящим изобретением предлагается акустическое сенсорное устройство. Устройство включает в себя подложку, способную распространять поверхностные акустические волны. У подложки имеется передняя поверхность, задняя поверхность, а также изогнутая соединительная поверхность, образованная между передней поверхностью и задней поверхностью. Устройство также включает в себя, по меньшей мере, один акустический преобразователь и, по меньшей мере, одну отражающую структуру. Преобразователь акустических волн и отражающая структура находятся за задней поверхностью подложки. Преобразователь акустических волн способен передавать и принимать поверхностные акустические волны на отражающую структуру и с отражающей структуры. Отражающая структура способна акустически связывать поверхностные акустические волны для их распространения с задней поверхности по передней поверхности подложки при помощи изогнутой соединительной поверхности.
Для полного понимания этого, а также других вариантов осуществления настоящего изобретения следует ознакомиться с последующим подробным описанием различных, конкретных вариантов осуществления изобретения и их изображением на прилагаемых чертежах, которые даны не в масштабе.
Краткое описание чертежей
На фиг.1 показан упрощенный вид в сечении акустического тактильного датчика или сенсорного экрана по одному из конкретных вариантов осуществления изобретения;
на фиг.2(а) и фиг.2(b) соответственно показаны виды спереди и сзади подложки акустического тактильного датчика по одному из конкретных вариантов осуществления;
на фиг.3(а), фиг.3(b) и фиг.3(с) показаны виды частично в сечении по-разному изогнутых соединительных поверхностей подложки акустических тактильных датчиков по разным конкретным вариантам осуществления;
на фиг.3(d), фиг.3(е) и фиг.3(f) соответственно показаны экспериментальные измерения, иллюстрирующие поведение поверхностных акустических волн, проходящих через по-разному изогнутые соединительные поверхности по фиг.3(а), фиг.3(b) и фиг.3(с);
на фиг.3(g) показан вид частично в сечении неправильно обработанного края подложки акустического тактильного датчика, изготовленного при помощи шлифовального инструмента 17, который может использоваться по одному из конкретных вариантов осуществления изобретения;
на фиг.3(h) показан вид частично в сечении обработанного края подложки акустического сенсорного датчика, изготовленного при помощи шлифовального инструмента 18, который может использоваться по другому конкретному варианту осуществления изобретения;
на фиг.3(i) и фиг.3(j) показаны виды частично в сечении изогнутых поверхностей подложки акустических тактильных датчиков различной конфигурации по дополнительным конкретным вариантам осуществления;
на фиг.4 показан упрощенный вид в сечении акустического тактильного устройства по другому конкретному варианту осуществления;
на фиг.5 показано изображение в разобранном виде, в перспективе акустического сенсорного устройства по одному из конкретных вариантов осуществления;
на фиг.6(а) и фиг.6(b) соответственно показаны вид частично в сечении и вид частично в плане угловой компоновки и схемы монтажа безрамочного акустического сенсорного устройства по одному из конкретных вариантов осуществления;
на фиг.6(с) показан вид частично в сечении другой угловой компоновки и схемы монтажа безрамочного акустического тактильного датчика по другому конкретному варианту осуществления;
на фиг.6(d) показан вид спереди безрамочного акустического тактильного датчика, являющегося частью другой системы, такой как информационный киоск, по одному из конкретных вариантов осуществления;
на фиг.6(е) показаны виды частично в сечении, в перспективе схемы уплотнения безрамочного акустического тактильного датчика, непосредственно перед монтажом заподлицо, являющегося частью другой системы, такой как информационный киоск, по одному из конкретных вариантов осуществления;
на фиг.6(f) показаны виды частично в сечении, в перспективе схемы монтажа безрамочного акустического тактильного датчика, являющегося частью другой системы, такой как информационный киоск, по варианту осуществления, показанному на фиг.6(е);
на фиг.6(g) и фиг.6(h) показаны виды частично в сечении, в перспективе двух других схем монтажа безрамочного акустического тактильного датчика, являющегося частью другой системы, такой как информационный киоск, по другим конкретным вариантам осуществления;
на фиг.7 показан вид в перспективе безрамочного акустического тактильного датчика, такого как монитор, с функциями касаний в краевой области по конкретным вариантам осуществления;
на фиг.8(а) и фиг.8(b) соответственно показаны виды спереди и сзади подложки акустического тактильного датчика по другому конкретному варианту осуществления;
на фиг.9(а) и фиг.9(b) соответственно показаны виды спереди и сзади подложки акустического тактильного датчика по еще одному конкретному варианту осуществления;
на фиг.10(а) и фиг.10(b) соответственно показаны виды спереди и сзади подложки акустического тактильного датчика по еще одному, другому конкретному варианту осуществления;
на фигурах 11(а) и 11(с), а также на фигурах 11(b) и фиг.11(d) соответственно показаны виды спереди и сзади подложки акустического тактильного датчика по другому конкретному варианту осуществления;
на фиг.12(а) и фиг.12(b) соответственно показаны виды спереди и сзади подложки акустического сенсорного датчика по другому дополнительному, конкретному варианту осуществления;
на фиг.12(с) показан укрупненный вид, частично в плане, угла задней поверхности подложки акустического тактильного датчика по одному из конкретных вариантов осуществления, показанному на фигурах; 12 (а) и 12(b), и
на фиг.13 показан график построения скорости волны акустического тактильного датчика в зависимости от толщины акустически благоприятного слоя по одному из конкретных вариантов осуществления.
Подробное описание конкретных вариантов осуществления
Настоящим изобретением предлагается устройство с тактильным датчиком, которое может быть сенсорным экраном, либо другим тактильным датчиком или сенсорным устройством (таким как сенсорный компьютер, сенсорный дисплей или указатель ассортимента, либо мобильным сенсорным устройством), в котором акустический преобразователь, например пьезоэлектрический элемент, используется для создания «поверхностной акустической волны», которая в настоящем документе понимается как рэлеевская волна, волна Лява или другая поверхностно-связанная акустическая волна.
Рэлеевские волны имеют полезную плотность энергии у тактильной поверхности за счет того, что они связаны с тактильной поверхностью. Рэлеевская волна - это волна, у которой имеются вертикальные и поперечные волновые компоненты при движении частиц подложки по эллиптической траектории в вертикальной плоскости, включая ось распространения волны, причем энергия волны уменьшается при увеличении глубины подложки. И касательное напряжение, и напряжение от давления/растягивающее напряжение ассоциируются с рэлеевскими волнами. С математической точки зрения рэлеевские волны существуют лишь в полубесконечной среде. В используемых подложках с конечной толщиной получаемую волну было бы точнее назвать квазирэлеевская волна. В данном случае понятно, что рэлеевские волны существуют лишь теоретически, а, следовательно, при ссылке на них имеются в виду квазирэлеевские волны. С инженерной точки зрения достаточно, чтобы толщина подложки составляла от 3 до 4 длин рэлеевской волны для того, чтобы обеспечивать распространение рэлеевской волны на интересующие расстояния конструкции сенсорного датчика.
Так же как и рэлеевские волны, волны Лява являются «поверхностно-связанными волнами», т.е. волнами, связанными и направляемыми одной поверхностью и не влияющими на другую поверхность подложки, при условии, что подложка имеет достаточную толщину. В отличие от рэлеевских волн, движение частиц для волн Лява является горизонтальным, т.е. параллельным тактильной поверхности и перпендикулярным направлению распространения. С волнами Лява связано лишь касательное напряжение.
В настоящем описании акустические тактильные датчики адлеровского типа с рэлеевскими волнами рассматриваются по конкретным вариантам осуществления. Между тем, считается, что по другим вариантам осуществления могут использоваться акустические тактильные датчики неадлеровского типа или акустические тактильные датчики, в которых используются другие типы акустических волн, в том числе волны Лява.
На фиг.1 показан упрощенный вид в сечении акустического тактильного датчика или сенсорного экрана 1. На фигурах 2(а) и фиг.2(b) соответственно показаны виды спереди и сзади подложки 5 акустического тактильного датчика по одному из конкретных вариантов осуществления. На фиг.2(а), где показан вид в плане передней поверхности 10 акустического тактильного датчика, преобразователи 35 обозначены пунктирной линией, образуя ссылочную окантовку для фиг.2(b), на которой показан вид задней поверхности 15 акустического тактильного датчика, где преобразователи 35 обозначены сплошной линией. Для создания дополнительной ссылочной окантовки, на фигурах 2(а) и 2(b) показаны оси X-Y координат.
Как видно из фиг.1, тактильный датчик 1 включает в себя подложку 5 с передней поверхностью 10, задней поверхностью 15, а также изогнутой соединительной поверхностью 20, соединяющей периферийную область 14 передней поверхности 10 с задней поверхностью 15. Изогнутая соединительная поверхность 20 будет рассмотрена ниже со ссылкой на фигуры 3(a)-3(f). У передней поверхности 10 имеется номинальная тактильная область 13, с которой соприкасается объект 30 для создания ввода через графический интерфейс пользователя, отображаемый на экране (на фиг.1 не показан), находящийся за задней поверхностью 15. Номинальная тактильная область 13 в данном случае образована как часть передней поверхности 10, являющаяся внутренним участком передней поверхности 10, которая у традиционных тактильных датчиков с акустическими волнами обычно считается активной тактильной областью и обычно не закрыта рамкой. Номинальная тактильная область 13 на фиг.2(а) находится внутри пунктирных линий, а периферийная область 14 является частью передней поверхности 10, находящейся снаружи номинальной тактильной области 13. У традиционных тактильных датчиков с акустическими волнами периферийная область 14 передней поверхности 10 закрыта рамкой. Объект 30 на фиг.1 показан в виде пальца, однако считается, что по отдельным конкретным вариантам осуществления, касания, передаваемые акустическими волнами, также могут быть осуществлены стилусом, прижимаемым к передней поверхности непосредственно или опосредовано через лист покрытия или противоотражающее покрытие. Акустические преобразователи 35 и структуры 40 отражающих элементов находятся на задней поверхности 15.
По одному из конкретных вариантов осуществления тактильный датчик 1 является сенсорным экраном прямоугольной формы, который, в целом, расположен спереди отображающего устройства, обращенного в сторону задней поверхности 15. Сенсорный экран обычно сопряжен с системой управления (не показана), обладающей рядом функций. Вначале формируется электронный сигнал, который возбуждает преобразователь, формирующий поверхностную акустическую волну, которая впоследствии создает совокупность волн. После этого преобразователь принимает совокупность волн и преобразует их в электрический сигнал. Электрический сигнал принимается, сохраняя значительную часть информации, с относительно высокой скоростью передачи данных управляющей системой нижнего уровня. По многим вариантам осуществления не требуется производить захват фазовой информации, содержащейся в сигналах. Поэтому контроллер и/или процессор сопряжены при помощи проводов или кабелей с различными преобразователями 35 тактильного датчика 1 для управления передачей и приемом поверхностных акустических волн, а также для обработки соответствующих изменений форм волн с целью определения координат касания и информации о положении. Контроллер, в используемом здесь смысле, означает электронное устройство, обычно состоящее из микропроцессора с прошивкой и аналоговыми электронными устройствами для формирования возбуждающих сигналов а также для обратного приема сигналов от сенсорного экрана. Контроллер и/или процессор преобразуют координаты касания и информацию о положении в соответствующие управляющие действия интерфейса пользователя, отображаемые на экране.
Общая структура и функционирование изобретения по одному из конкретных вариантов осуществления будет рассмотрены ниже со ссылкой на фигуры 1, 2(а) и 2(b), a также другие чертежи.
По одному из конкретных вариантов осуществления настоящего изобретения, подложки могут быть выполнены в виде плоской панели прямоугольной формы или непрямоугольной формы, например шестиугольной пластины. По отдельным вариантам осуществления проводящая подложка 5 состоит из плоской панели или панели с незначительным изгибом. Как вариант, подложка может быть изогнута вдоль одной или обеих осей в виде цилиндрической, сферической или эллипсоидной поверхности или участка поверхности, либо может иметь иные компоновки. По другим конкретным вариантам осуществления допустимы сферические подложки с большим телесным углом или полностью цилиндрические подложки, у которых передняя поверхность 10 и задняя поверхность 15 подложек 5 могут быть скорее изогнутыми, чем планарными или плоскими. По другим вариантам осуществления может использоваться подложка 5 с вырезом в центре (в виде пончика или рамочной структуры) с изогнутыми соединительными поверхностями 20 на внутреннем или внешнем краях. Например, может использоваться многоугольный тактильный датчик с отражающими структурами с каждой стороны, а также преобразователями у каждой вершины. Настоящее изобретение не ограничено датчиками со стандартной прямоугольной геометрией. Следует отметить, что по данной заявке подложка не обязательно должна быть единой, монолитной структурой, а скорее акустически сопряженным набором элементов, которые могут быть однородными или неоднородными (например, для волн Лява может использоваться композитная подложка, внутренний и внешний материал которой имеют разную плотность). Акустическая траектория от передающего преобразователя к принимающему преобразователю может опционно проходить через области подложки, которые скрепляются между собой во время процесса изготовления.
Подложка 5 выступает в качестве проводящего носителя, по поверхностям которого могут распространяться акустические волны. Хотя разновидности проводящего носителя не ограничены конкретными вариантами, используется панель, по поверхности которой могут распространяться акустические, в частности ультразвуковые поверхностные акустические, волны. Отображаемая область панели включает в себя тактильный диапазон ввода координат и, в целом, имеет боковую симметричную форму, как в вышеупомянутом варианте осуществления, в частности линейно симметричную форму (в частности, прямоугольную форму). По конкретным вариантам осуществления подложка 5 из проводящего носителя, выполненная в виде панели, в целом, является прозрачной, таким образом, чтобы был виден дисплей, расположенный снизу сенсорной панели.
Предпочтительный проводящий носитель является прозрачным и изотропным.
По разным вариантам осуществления к числу стекол, подходящих для формирования подложки сенсорных экранов, сенсорных мониторов или сенсорных компьютерных устройств относится натриево-кальциево-силикатное стекло; боросодержащее стекло, например боросиликатное стекло; барий-, стронций-, цирконий-,или свинцовосодержащее стекло, а также кронглас. По отдельным вариантам осуществления в качестве предпочтительных прозрачных подложек может использоваться стекло В 270™ фирмы Schott, стекло PD200 фирмы Asahi Glass Co. или любое стекло, обладающее низкими потерями при проводимости поверхностных акустических волн, что обеспечивает более высокое качество сигналов.
По другим вариантам осуществления тактильных датчиков, которые не используются в качестве сенсорных экранов (например, электронная классная доска или тачпад), могут применяться другие непрозрачные материалы подложки, имеющие допустимые потери акустических волн, в том числе, но не только, алюминий и сталь. Предпочтительно алюминий и некоторые другие металлы могут иметь покрытие из эмали с относительно низкой скоростью распространения акустической фазы, что позволяет использовать их для волн Лява, за счет высокой тактильной чувствительности (относительно горизонтальных касательных пластинчато-волновых режимов) на передней поверхности 10. При определенных обстоятельствах подложки 5 также могут быть изготовлены из полимера с низким коэффициентом потери акустических волн. Подходящие подложки также могут состоять из слоистого материала или других подложек, обладающих неоднородными акустическими свойствами. Слоистый материал, например слоистый материал из боросиликатного стекла, стекла Schott B270™ или натриево-кальциевого-силикатного, либо из алюминия со слоем эмали предпочтительно, должен обеспечивать распространение волн Лява, а также концентрацию энергии акустических волн на передней поверхности 10.
По настоящему изобретению могут использоваться преобразователи различного типа. Преобразователь - это физический элемент или набор элементов, преобразующих один вид энергию в другой. Сюда также входит преобразование акустических волновых режимов и преобразование между электрической и акустической энергией. Акустическая излучающая или принимающая структура, являющаяся частью акустического преобразователя, обычно является пьезоэлектрическим элементом, но не ограничена только этим. Например, доступны и, помимо других, могут использоваться электроакустические преобразователи, оптоакустические преобразователи, магнитоакустические преобразователи, акустоакустические преобразователи (преобразующие один тип акустической волны в другой), а также термоакустические преобразователи. Предпочтительно ультразвуковой клиновидный преобразователь может находиться на задней поверхности 15 как для передачи, так и для приема рэлеевских волн или волн Лява. Пьезоэлектрические преобразователи, такие как гребенчатые электродные преобразователи, состоящие из прямоугольной призматической пьезоэлектрической керамики с преобразователями, образованными на ее поверхности, могут использоваться по отдельным вариантам осуществления для акустического сопряжения с задней поверхностью 15 за счет установки плоской поверхности керамического элемента или металлического электрода, образованного на задней поверхности 15 подложки 5. Подобные преобразователи должны передавать поверхностные акустические волны достаточной мощности таким образом, чтобы принимаемые волны, а также возмущения, связанные с касанием конкретной подложки конкретных размеров можно было корректно определять и подтверждать координатные данные.
В структуре 40 из отражающих элементов имеются регулярные промежутки или нарастающие промежутки, позволяющие преломлять или рассеивать акустические волны. В известном тактильном датчике адлеровского типа используется отражающая структура для когерентного отражения акустической волны под заданным углом, причем угол падения равен углу отражения. Элементы отражающей структуры, в целом, образованы параллельно друг другу, а угол отражающего элемента или каждый из элементов отражающей структуры, в целом, расположен примерно под углом в 45° к оси Х или к оси Y для распространения акустических волн, таких как рэлеевские волны, в направлении оси Х и оси Y. По настоящему изобретению отражающие структуры 40 на задней поверхности 15 имеют отражающие элементы, которые образованы таким образом, чтобы они направляли акустические волны наружу в сторону изогнутой соединительной поверхности 20, когда подобные волны отправляются с передающих преобразователей; а также собирали поверхностные акустические волны, следующие с изогнутой соединительной поверхности 20 в направлении преобразователей. Как известно из патента США 5591945, который в явном виде включен здесь по ссылке, элементы отражающей структуры также могут быть наклонены под другим углом для создания непрямоугольных волновых траекторий для сенсорного экрана, либо для преобразования типов волн между падающей волной и отраженной волной, например, из квазирэлеевской волны в волну Лява.
Отражающие структуры могут быть образованы различными способами, например печатью, травлением, штамповкой металлической подложки либо формированием пресс-формы для полимерной подложки. Известные отражающие структуры, в целом, образованы из стеклоприпоя, который при помощи трафаретной печати переносится на натриево-кальциево-силикатное стекло или на другой материал подложки, полученный в результате флоат процесса, и вулканизируется в печи для формирования шевронного рисунка или приподнятых стеклянных прерываний. Подобные прерывания обычно имеют высоту или глубину порядка 1% от длины акустической волны, а следовательно, лишь частично отражают акустическую энергию. Для получения выровненной акустической мощности на принимающем преобразователе промежутки между отражающими элементами могут быть уменьшены при увеличении расстояния от передающего преобразователя, в противном случае баланс акустического удельного коэффициента пропускания и отражения у отражающих элементов может быть нарушен, приводя к повышенной отражаемости при увеличении расстояния от передающего преобразователя. Поскольку тактильный датчик, в целом, находится перед устройством отображения, а также поскольку отражающая структура, в целом, оптически видна, отражающие структуры, обычно, размещают на периферийной части передней поверхности подложки, снаружи номинальной тактильной области, так, чтобы они были закрыты и защищены рамкой. Между тем, по настоящему изобретению, отражающие структуры 40 образованы на задней поверхности 15 подложки 5, поэтому защитная рамка для периферийной части передней поверхности 10 подложки 5 не требуется.
Со ссылкой на фигуры 2(а) и 2(b) по одному из конкретных вариантов осуществления изобретения предлагается система с сенсорным экраном адлеровского типа, в которой преобразователи 35 используются для сопряжения пьезоэлектрических элементов с зондирующей волной в подложке. Тактильный датчик 1, таким образом, образует систему устройств по вводу координат, содержащую подложку 5 с имеющейся у нее областью отображения с симметричными боковыми сторонами, по которой могут распространяться поверхностные акустические волны. Так же как и у типичной системы адлеровского типа с четырьмя преобразователями, две пары преобразователей 35 используются соответственно для осей Х и Y, однако вместо их расположения на передней поверхности 10, преобразователи 35 находятся на задней поверхности 15 подложки 5. В частности, передающий преобразователь 35а расположен в передающей области на оси Y, а передающий преобразователь 35b расположен в передающей области на оси X, причем передающие области находятся на задней поверхности 15 подложки 5. Принимающий преобразователь 35с, расположенный в принимающей области на оси Y, напротив передающей области на оси Y, на задней поверхности 15, предназначен для определения координаты Y касания передней поверхности 10. Принимающий преобразователь 35d, расположенный в принимающей области на оси X, напротив передающей области на оси X, на задней поверхности 15, предназначен для определения координаты Х передней поверхности 10. То есть передающий преобразователь 35а и принимающий преобразователь 35с используются для определения положения касания по координате Y, а передающий преобразователь 35b и принимающий преобразователь 35d используются для определения положения касания по координате X. Каждый преобразователь 35 может симметрично либо передавать, либо принимать акустическую волну. Две пары преобразователей расположены под прямыми углами, образуя систему координат.
Тактильный датчик также включает в себя пару отражающих структур 40а и 40b оси Y и пару отражающих структур 40с и 40d оси X, однако вместо расположения на передней поверхности 10, отражающие структуры 40 находятся на задней поверхности 15 подложки 5. В целом, поверхностные акустические волны проходят от передающего преобразователя вдоль оси, на которой находится отражающая структура, рядом с периферийным краем панели. Необязательно, для уменьшения ширины отражающей структуры могут использоваться эффекты акустического волновода. Каждый из элементов отражающей структуры связывает часть акустической волны с зондирующей волной, проходящей через панель, и передает часть волны на смежный элемент структуры, тем самым, связывая распределенные зондирующие волны со всей тактильно-сенсорной области в узкий акустический пучок, который связывается с преобразователем. В целом, система передает короткий по длительности ультразвуковой волновой сигнал в виде пакета при помощи передающих акустических волновых преобразователей 35 и отражающих структур 40, распределяя передаваемые сигналы наружу от задней поверхности 15, вокруг изогнутой соединительной поверхности 20, по передней поверхности с имеющейся на ней номинальной тактильной областью 13, вокруг противоположной соединительной поверхности 20, вовнутрь к задней поверхности 15, а также через отражающие структуры 40 на принимающие акустические волновые преобразователи 35. Отражающие структуры 40а и 40с выступают в качестве рассеивателей акустических волн, а отражающие структуры 40b и 40d выступают в качестве коллекторов акустических волн. Контроллер системы анализирует принимаемый сигнал по временной оси для определения указанных координат касания (это происходит в том случае, когда траектории движения, показанные на фиг.2(а), пересекаются) в пределах тактильной области 13 на передней поверхности. В конкретных вариантах осуществления по фигурам 2(а) и 2(b) используется тактильный датчик XY, работающий с поверхностными акустическими волнами.
В частности, поверхностные акустические волны проходят от передающего преобразователя 35а в направлении отрицательной (-) оси Y, на которой, рядом с периферийным краем задней поверхности 15 подложки 5, находится отражающая структура 40а. Как видно из фигур 2(а) и 2(b), где сплошными стрелками указана траектория движения зондирующей волны, каждый из элементов отражающей структуры 40а связывает или отражает часть акустических волн с зондирующей волной: следующей от отражающей структуры 40а наружу, вдоль отрицательной (-) оси Х в направлении и вокруг ближней соединительной поверхности 20 подложки 5, следующей вдоль положительной (+) оси Х по передней поверхности, следующей в сторону и вокруг противоположной изогнутой соединительной поверхности 20, в направлении отрицательной оси (-) Х к отражающей структуре 40b на задней поверхности 15, а также следующей вдоль отражающей структуры 40b в направлении положительной (+) оси Y на принимающий преобразователь 35с. Элементы отражающих структур 40а и 40b также передают часть акустических волн на смежные элементы структур 40а и 40b соответственно. Аналогичным образом, поверхностные акустические волны проходят от передающего преобразователя 35b вдоль отрицательной (-) оси X, на которой, рядом с периферийным краем задней поверхности 15 подложки 5, находится отражающая структура 40с. Как видно из фигур 2(а) и 2(b), где сплошными стрелками указана траектория движения зондирующей волны, каждый из элементов отражающей структуры 40с связывает или отражает часть акустических волн с зондирующей волной: следующей от отражающей структуры 40с наружу, вдоль отрицательной (-) оси Y в направлении и вокруг ближней соединительной поверхности 20 подложки 5, следующей вдоль положительной (+) оси Y по передней поверхности, следующей в сторону и вокруг противоположной изогнутой соединительной поверхности 20 в направлении отрицательной оси (-) Y к отражающей структуре 40d на задней поверхности 15, а также следующей вдоль отражающей структуры 40d в направлении положительной (+) оси Х на принимающий преобразователь 35с.
Прохождение поверхностных акустических волн вокруг изогнутой соединительной поверхности 20 более детализированно рассмотрено на фиг.3(а), фиг.3(b) и фиг.3(с), где показаны виды частично в сечении по-разному изогнутых краевых соединительных поверхностей подложки акустических тактильных датчиков по разным конкретным вариантам осуществления изобретения. Во включенном по ссылке патенте США 6567077 рассмотрены торцевые или угловые поверхности (участки, изменяющие направление акустической волны) подложки проводящего носителя, скошенные или скругленные таким образом, чтобы акустическая волна могла поворачивать вокруг них и распространяться от передней поверхности к задней поверхности проводящего носителя либо от задней поверхности к передней поверхности проводящего носителя через скошенный участок. Как видно из фигур 1 и 2 патента США 6567077, акустическая поверхностная волна или т.п., проходя по поверхности сферического проводящего носителя, соответствует контуру секции, сделанному путем разрезания сферы вдоль плоскости, включая центр сферы, причем подобная волна, проходящая по поверхности колончатого проводящего носителя, проходит по поверхности проводящего носителя спирально. Акустическая волна, таким образом, может менять направления, проходя через изогнутую поверхность проводящего носителя с ничтожными потерями. На фигурах 3 и 4 патента США 6567077 изображены закругленные периферические краевые участки проводящего носителя, которые скошены и образуют полусферическую секцию с радиусом R.
На фиг.3(а) изображена скругленная часть 20 проводящего носителя или подложки 5 с радиусом R, равным половине толщины Т подложки 5, аналогично полусферической секции по фиг.4 патента США 6567077. Если полусферическая секция имеет радиус R, то длина b закругленной части проводящего носителя равна R, который равен Т/2, если считать, что Т равно пяти длинам λ рэлеевских волн. Между тем, изобретателями было установлено, что полусферическая секция не является обязательной для изменения направления поверхностной акустической волны, проходящей по изогнутой поверхности проводящего носителя, без заметных потерь. Как видно из фиг.3(b) закругление верхнего и нижнего острых краев подложки 5 таким образом, чтобы соответствующий радиус R изогнутой поверхности 20 составлял примерно Т/4, приводит к тому, что поверхность 20 подложки 5 имеет длину b, которая существенно меньше длины b у полусферической секции. Кроме этого, как видно из фиг.3(с), даже при изменении верхнего и нижнего острых краев подложки 5 таким образом, чтобы соответствующий радиус R изогнутой поверхности 20 составлял примерно Т/8, приводит к тому, что поверхность 20 подложки 5 имеет длину b, которая еще меньше, чем на фигурах 3(а) и 3(b).
Изобретатели показали, что по мере того как R (или b) возрастающе приближается к Т/2 (или 5λ/2 при Т=5λ), изогнутая поверхность 20 несколько лучше подходит для передачи поверхностных акустических волн; однако по мере того как R (или b) убывающее приближается к Т/8 и остается значительно больше длины поверхностной акустической волны, пограничная область тактильного датчика желательно становится меньше. Соответственно был достигнут баланс между двумя этими подходами, с учетом стоимостных факторов, а по одному из конкретных предпочтительных вариантов осуществления значение R было выбрано равным примерно от Т/4 до Т/8. Следует признать, что радиусы R могут быть меньше Т/8, при условии, если сигнал принимается устойчиво, а также соблюдены другие конструктивные ограничения. Поскольку алюминий аналогичен стеклу в качестве подложки при распространении поверхностных акустических волн, изобретателями были произведены экспериментальные измерения подложки из алюминия, имеющей изогнутую соединительную поверхность 20 с разными радиусами краевой изогнутости и толщиной (Т) около 3 мм. При испытаниях использовались клиновидные преобразователи, снабженные керамическим пьезоэлектрическим элементом шириной примерно 3 мм (из семейства пьезоэлектрических керамических элементов PZT, с номинальным резонансом на основной частоте в 5.53 МГц). Было произведено возбуждение передающего преобразователя для передачи поверхностной акустической волны, которая проходила по передней поверхности подложки, в направлении и вокруг изогнутой соединительной поверхности подложки, имеющей радиус или радиусы R, а затем проходила по задней поверхности подложки для ее измерения принимающим преобразователем. Для заданного возбуждающего напряжения на частоте 5.53 МГц, поданного на передающий преобразователь, амплитуда сигнала, измеряемая через соответствующий промежуток времени у принятого сигнала на принимающем преобразователе, существенно не отличалась при разных радиусах, показанных на фиг.3(е) (где радиусы R=T/4) и фиг 3(f) (где радиусы R=T/8), по сравнению с фиг.3(d) (где радиус R=T/2). Данные измерения показывают, что амплитуды принимаемых сигналов, измеряемых через ожидаемый промежуток времени (ожидаемый принимаемый сигнал приходит через промежуток времени от 17 до 25 микросекунд), существенно не меняются при подобном возбуждении. Другие формы волн с любой из сторон принимаемого сигнала всего лишь являются искажениями, основанными на других непреднамеренных и посторонних волнах или способах распространения в подложке, которые возникали в исследуемой системе.
Для изогнутой соединительной поверхности 20 с R в диапазоне примерно от Т/4 до примерно Т/8, исследования, проведенные изобретателями на примере алюминиевого проводящего материала, показали, что для передачи поверхностных акустических волн по стеклянным проводящим подложкам допустима меньшая величина R, но только в том случае если отсутствуют «изломы» или острые скошенные края. Для продавцов стекла «закругленный край» стеклянной подложки, как правило, все равно имеет изломы. Как отмечалось в связи с формулой, приведенной на фиг.9 патента США 5739479, скошенный угол Θ в 16 градусов между скошенной поверхностью и активной тактильной поверхностью у монолитной подложки из натриево-кальциево-силикатного стекла приводит к потерям сигнала на акустической траектории значительно меньше 6 дБ. Скошенный угол Θ в 25 градусов между скошенной поверхностью и активной тактильной поверхностью у монолитной подложки из натриево-кальциево-силикатного стекла продемонстрировал измеренные потери сигнала на акустической траектории около 8 дБ. Квадратная экстраполяция от 25 градусного скоса предполагает, что при скошенном угле Θ в 33 градуса потери сигнала составят 14 дБ. По конкретным вариантам осуществления при любых изгибах скошенный угол Θ должен быть около 10 градусов для того, чтобы потери составляли менее 3 дБ при четырех изгибах (два для каждого изогнутого участка 20 с противоположных сторон подложки 5) на всей акустической траектории.
Скругление острых скошенных углов стеклянной подложки может обеспечиваться за счет шлифовки стекла до достижения нужного профиля, а затем, необязательно, полировки для получения гладкого профиля для конкретного варианта осуществления. По отдельным вариантам осуществления изломы, в том числе, например, уступ 16, показанный на фиг.3(g), можно свести к минимуму или исключить. Подобные изломы или уступы могут возникать, когда используется шлифовальный инструмент 17 (сечение которого показано) с необходимым радиусом или радиусами R, а подложка 5 несколько соосно смещена от инструмента 17 и/или существует разница по толщине у разных подложек 5. Подобные изломы или резко скошенные края по краям тактильной подложки, которые могут быть нежелательны, приводят к появлению акустических паразитных сигналов, которые по отдельным вариантам осуществления можно свести к минимуму либо исключить. Паразитные сигналы (которые могут возникать в результате преобразований между поверхностными акустическими волнами и волнами Лэмба или волнами других типов) могут нежелательно приводить к тому, что тактильный датчик будет обнаруживать «паразитные» касания, которые не являются фактическими касаниями, либо измерять искаженные координаты, поэтому по отдельным вариантам осуществления подобные паразитные явления необходимо сводить к минимуму. На фиг.3(g) шлифовальный инструмент 17, например, с R=T/3 используется на обычном шлифовальном станке с числовым программным управлением («ЧПУ»). Уступ 16 приводит к появлению нежелательных паразитных сигналов (от волн Лэмба), даже если величина уступа (возникающего из-за смещения или изменений по толщине подложек) примерно составляет порядка длины поверхностной акустической волны. С целью увеличения допусков для подобных отклонений по толщине подложки и/или смещений между подложкой и используемым шлифовальным инструментом, по отдельным вариантам осуществления может использоваться усовершенствованный шлифовальный инструмент 18, у которого, например, R=T/6 и имеется более широкая горловина с углом конусности в диапазоне примерно от 10 до 12 градусов, тогда как по другому конкретному варианту осуществления используется инструмент, у которого R=T/3, а угол конусности составляет от 3 до 5 градусов, как это показано на фиг.3(h). На фиг.3(h) показан изогнутый краевой профиль подложки 5, изготовленной с использованием инструмента 18, в данном случае подложка 5 не смещена и надлежащим образом выровнена с инструментом; на фиг.3(i) показан изогнутый краевой профиль подложки 5, изготовленной с использованием инструмента, у которого R=T/6, в данном случае подложка смещена относительно инструмента 18; а на фиг.3(j) показан изогнутый краевой профиль подложки 5, изготовленной с использованием инструмента 17' (аналогичного инструменту 17 по фиг.3(g), но, например, с R=T/3 у скошенного отверстия имеется угол а), в данном случае подложка 5 смещена относительно инструмента 17'. Хотя по одному из конкретных вариантов осуществления при частоте примерно в 5.53 МГц для подложки толщиной примерно 3 мм наиболее желательно использовать шлифовальный инструмент с углом конусности в 4 градуса и R=T/3 (при этом использование шлифовального инструмента с углом конусности в 12 градусов и R=T/6 для подложки с такой же толщиной приводит к появлению нежелательных паразитных сигналов), на мощность и допустимый уровень паразитных сигналов влияет множество факторов, поэтому для отдельных областей применения допустимо использовать шлифовальный инструмент с углом конусности в 12 градусов и R=T/6. В зависимости от степени выравнивания или существующих допусков передняя и задняя поверхности подложки 5 связываются при помощи, по меньшей мере, одной изогнутой соединительной поверхности, которая может включать в себя плоские участки, расположенные, например, между передней поверхностью 10 и изогнутым участком (по конкретному варианту осуществления угол между плоским участком и передней поверхностью 10 составляет менее 5 градусов), между двумя соответствующими изогнутыми секциями, и/или между задней поверхностью 15 и изогнутой секцией (по конкретным вариантам осуществления угол между плоским участком и передней поверхностью 10 составляет менее 5 градусов). Разумеется, приведенные примеры также применимы и для ситуации, когда такая же подложка с указанной толщиной подложки имеет некоторые производственные отклонения по толщине. Края, как отмечалось выше, могут быть необязательно отполированы для обеспечения большей гладкости. По другим вариантам осуществления другие способы закругления острых краев подложки могут включать в себя формование пластика, формование стекла или формование алюминия.
Следует признать, что изогнутая соединительная поверхность 20 может иметь различные профили сечения, такие как, например, показаны на фигурах 3(а)-3(с), или на фигурах 3(h)-3(j), а изогнутая соединительная поверхность 20 может включать в себя, по меньшей мере, одну изогнутую секцию с радиусом R. На фигурах 3(b)-3(с) изображены примеры изогнутой соединительной поверхности 20 с имеющимися у нее двумя симметрично изогнутыми секциями (каждая имеет одинаковый радиус R), сопряженными прямой секцией, однако по другим вариантам осуществления изобретения у изогнутой соединительной поверхности 20 могут быть две асимметрично изогнутые секции (с разными значениями R), сопряженные прямой секцией. На фигурах 3(h)-3(j) показаны виды частично в сечении изогнутых соединительных поверхностей разной конфигурации подложки акустических тактильных датчиков по дополнительным, конкретным вариантам осуществления, рассмотренным выше. Разумеется, виды на фигурах 3(а)-3(с) и 3(h)-13(j) не являются исчерпывающими, а всего лишь приведены в качестве примеров изогнутого краевого профиля подложки. Кроме этого, радиус R на фигурах 3(g), 3(h) и др. можно обобщенно свести от радиуса дуги круга к минимальному радиусу кругов, проходящих касательно к кривой с непрерывно меняющейся кривизной. В описании выше считается, что толщина Т подложки тактильного датчика равна примерно пяти длинам Х волны рэлеевских волн, как это наиболее типично бывает в конструкции большинства коммерческих продуктов, поэтому такое выражение как R=T/3 можно переформулировать в R=5λ/3. Аналогичным образом, выражение R=T/6 можно переформулировать в R=5λ/6. Разумеется, для подложки, толщина Т которой отличается от пяти длин волны рэлеевских волн, выражения должны быть соответствующим образом изменены. Например, были отмечены хорошие способности по подавлению паразитных сигналов при радиусе закругления краев R=T/2 для стекла толщиной 5.4λ. Для стекла толщиной 5.4λ подобный радиус закругления краев также можно выразить как R=2.7λ. Хотя с акустической точки зрения это не требуется, на рынке существует спрос на сенсорные экраны ПАВ, подложки которых изготовлены из значительно более толстого (и закаленного) стекла, такие как продукция SecureTouch™ фирмы Тусо Electronics из стекла толщиной примерно 11λ; с целью эффективного подавления паразитных волн безрамочные варианты подобной продукции можно изготавливать с закругленными краями, с радиусом R=2.7λ.
На фиг.4 показан упрощенный вид в сечении устройства 50 с акустическим тактильным датчиком (также именуемого сенсорным устройством 50), которое по разным конкретным вариантам осуществления изобретения может быть сенсорным монитором, сенсорным компьютером, сенсорным видео дисплеем, указателем ассортимента или сенсорным мобильным устройством. Аналогично тактильному датчику 1 по фиг.1, сенсорное устройство 50 включает в себя подложку 5 с передней поверхностью, задней поверхностью 15 и изогнутой поверхностью 20, соединяющей периферийную область 14 передней поверхности с задней поверхностью 15. У передней поверхности 10 имеется номинальная тактильная область 13, на внутренней части передней поверхности, с которой соприкасается объект 30 для осуществления ввода с использованием графического интерфейса пользователя, отображаемого на дисплее 25 (показан на фиг.4), сопряженного с задней поверхностью 15. По одному из конкретных вариантов осуществления дисплей 25 может быть оптически связан с задней поверхностью 15, однако по другим вариантам осуществления дисплей 25 не соприкасается с задней поверхностью 15, а лишь расположен снизу подложки 5 и удерживается в устойчивом положении относительно подложки 5 при помощи корпуса 55 и клея. На фиг.4 также изображены электронные устройства, в том числе сенсорный контроллер (который будет рассмотрен более подробно ниже), обозначенный прямоугольником 69 с клеммами, соединенными с проводами и/или кабелями (не показаны). Номинальная тактильная область 13 образована в виде части передней поверхности 10, расположенной внутри пунктирных линий по фиг.2(а), а периферийная область 14 является частью передней поверхности 10, расположенной снаружи номинальной тактильной области 13. Объект 30 изображен на фиг.4 в виде пальца, однако по некоторым конкретным вариантам осуществления касания, регистрируемые акустическими волнами, также могут быть сделаны стилусом, прижимаемым к передней поверхности непосредственно или опосредовано через лист покрытия (если лист покрытия закрывает те поверхности подложки 5, которые используются в качестве путей прохождения зондирующих волн) или противоотражающее покрытие.
Общая структура и функционирование тактильных аспектов изобретения по одному из конкретных вариантов осуществления аналогичны тем, что были рассмотрены выше со ссылкой на фигуры 1, 2(а) и 2(b), за некоторыми отличиями, которые сейчас будут рассмотрены.
По данному конкретному варианту осуществления акустические преобразователи 35 и структуры 40 отражающих элементов сопряжены с задней поверхностью 15 при помощи акустически благоприятного слоя 60. В настоящем описании под «акустически благоприятным» материалом понимается материал, который распространяет поверхностные акустические волны без быстрого затухания, предпочтительно приводя лишь к незначительным изменениям скорости поверхностных акустических волн в целях упрощения производственного контроля скорости волн, несмотря на фракционные изменения по толщине материала. По некоторым конкретным вариантам осуществления акустически благоприятный слой 60 предпочтительно является непрозрачным и может быть одновременно связан с подложкой 5 и выступать в качестве подходящей обрабатывающей поверхности для образованных на нем преобразователей 35 и отражающих структур 40. Например, клиновидные преобразователи 35 связаны с, а отражающие структуры 40 с фриттой образованы на слое 60. По отдельным вариантам осуществления слой 60 может быть тонкой пленкой из черного неорганического материала (такого как чернила или краска, нанесенных методом трафаретной печати, покраской, напылением или иным образом) на заднюю поверхность 15 подложки 5.
По одному из конкретных вариантов осуществления акустически благоприятный слой 60 может быть неорганической черной краской, изготовленной из таких материалов, как керамический полимер или глазурь. Например, в качестве слоя 60 могут использоваться диоксид титана (TiO2) или двуокись кремния (SiO2), которые по отдельным вариантам осуществления могут комбинироваться с кобальтом (Со), хромом (Cr), медью (Cu), никелем (Ni) или марганцем (Mn) для получения насыщенного цвета. В качестве акустически благоприятного слоя 60 могут использоваться отдельные особо термостойкие краски, такие как особо термостойкая ультра краска RustOleum™ или покрытие для стекла Ferro™ 1597. По другим вариантам осуществления слой 60 может быть белого или других цветов. Слой 60 также может иметь привлекательный или яркий внешний вид, визуально скрывая при этом расположенные за подложкой 5 преобразователи 35 и структуры 40. По конкретным вариантам осуществления слой 60 также может состоять из определенной цветовой композиции, других декоративных особенностей и/или полезных особенностей, например, для указания функций касания в краевой области. По отдельным вариантам осуществления акустически благоприятный слой 60 может быть светопропускающим, таким образом, чтобы свечение от источников света (например, светоизлучающих диодов), размещенных за задней поверхностью 15, после их включения могло проходить через светопропускающий слой 60. Разумеется, по отдельным вариантам осуществления скрывание преобразователей 35 и структур 40 может быть нежелательным, если преследуется цель создания более рабочего или технологичного вида, в этом случае слой 60 может быть прозрачным, совсем не использоваться (как на фиг.1) либо использоваться лишь на части периферийной области 14 задней поверхности 15.
По одному из конкретных вариантов осуществления, при его размещении между задней поверхностью 15 и преобразователями 35/структурами 40, слой 60 виден через подложку 5 (а по вариантам осуществления, когда слой 60 является непрозрачным, закрывает преобразователи 35 и структуры 40), поэтому пользователям кажется, что он окантовывает номинальную тактильную область 13 (обозначенную пунктирными линиями на фиг.5, где представлено упрощенное изображение в разобранном виде акустического тактильного датчика 50). По одному из конкретных вариантов осуществления тактильный датчик 50 является прямоугольным сенсорным устройством со встроенным дисплеем 25, который обращен в сторону задней поверхности 15 таким образом, чтобы дисплей был виден через подложку 5. По отдельным вариантам осуществления тонкий слой 60 может быть даже нанесен на периферийную часть 14 передней поверхности 10 подложки.
Толщину слоя 60 следует подбирать таким образом, чтобы создаваемое слоем 60 затухание сигнала было сбалансировано с учетом решения любых эстетических задач, связанных с его непрозрачностью. Как видно из фиг.13, на скорость волны (или точнее фазовую скорость фронта волны, в отличие от групповой скорости волновых пакетов) поверхностных акустических волн, распространяющихся в области слоя 60 тактильного датчика, влияет толщина покрытия слоя 60. У многих материалов, которые могут быть синтерированы при температурах, сопоставимых с температурами изготовления стеклянных подложек, скорость прохождения звука будет ниже, чем у стекла. В данном случае скорость волны VSAW уменьшается, поскольку часть мощности поверхностной акустической волны, распространяющейся через слой 60, увеличивается (т.е. толщина слоя 60 приводит к замедлению распространения волн). Если материал слоя 60 имеет более высокую скорость распространения звука, чем материал подложки 5, то в этом случае скорость волны VSAW увеличивается, поскольку увеличивается часть мощности поверхностной акустической волны, распространяющейся через слой 60, (т.е. толщина слоя 60 приводит к ускорению распространения волн). Что касается скорости волны VSAW с точки зрения управления производственным процессом, то идеальный материал для слоя 60 не создает изменения скорости волн, а, следовательно, скорость волны не зависит от толщины слоя 60. Для материала, используемого в слое 60 при сборе данных для фиг.13, также было замечено, что очень сильное затухание происходит, когда толщина слоя 60 превышает 50 микрон для данных частот. Для одного из конкретных вариантов осуществления, когда частота составляет около 5,53 МГц, а подложка изготовлена из стекла В270, было установлено, что толщина слоя 60, варьирующаяся в диапазоне примерно 15-21 микрон, или предпочтительно 12-20 микрон, является приемлемой толщиной, отвечающей требованиям по низкому затуханию волн и аккуратному эстетичному внешнему виду (значительная непрозрачность без заметного просвечивания), в случае использования для слоя 60 черных чернил Ferro 24-8328. Возможно, существуют другие типы чернил, с более высокой оптической плотностью, создающие аккуратный эстетичный внешний вид при более тонком покрытии, что желательно с точки зрения акустического проектирования, поскольку это позволяет уменьшить акустические затухания, а также уменьшить изменения скорости волн.
Сенсорное устройство 50 включает в себя корпус 55, который вмещает и защищает дисплей 25, слой 60, преобразователи 35, структуры 40 отражающих элементов, а также другие компоненты устройства, такие как процессоры, контроллеры, соединители, и другие пассивные или активные электронные устройства или детали, которые могут быть необходимы для работы устройства. В целях упрощения подобные другие компоненты не показаны.
В системах или устройствах с тактильными датчиками по настоящему изобретению обычно используется система электронного управления (на чертежах не показана), которая формирует акустические волны и определяет возмущения, свидетельствующие о положении или координате касания. Электронное управление, в свою очередь, взаимодействует с компьютерной системой (на чертежах не показана), например, с персональным компьютером, встроенной системой, киоском или терминалом пользователя, используемыми в качестве интерфейсного устройства для взаимодействия с человеком. Компьютерная система, следовательно, может быть любого соответствующего типа и может, например, включать в себя дисплей 25, устройство ввода и/или вывода аудиосообщений, клавиатуру, электронную камеру, другие манипуляторные устройства ввода и т.п. Компьютерная система работает под специализированным программным обеспечением, однако обычно используется стандартная операционная система, такая как Microsoft Windows (например, версии 3.1, 3.11, 7, WFW, CE, NT, 95, 98 и т.п., либо другая операционная система, соответствующая множеству, подмножеству или супермножеству прикладных программных интерфейсов Windows или API), операционная система Macintosh, варианты UNIX и т.п. Тактильный датчик, таким образом, может использоваться в качестве основного или дополнительного манипулярного устройства системы с графическим интерфейсом пользователя для получения ввода пользователя. Контроллер тактильного датчика и компьютерная система также могут быть интегрированы, например, во встроенную систему.
По конкретному варианту осуществления корпус 55 сопряжен с подложкой 5 и может быть загерметизирован от воздействия окружающей среды по периферийной части 65 при помощи соответствующего средства, такого как полоска из пенопласта с закрытыми порами, прокладка из мягкой резины с сечением автомобильной щетки стеклоочистителя, а также узкого слоя силикона или эпоксидной смолы, отверждающихся при комнатной температуре, либо другого материала с контактной шириной, которая благоприятствует прохождению акустических волн. Таким образом, уплотнение по периферийной части 65 обеспечивает достаточную передачу энергии акустических волн для функционирования тактильного датчика, при этом защищая структуры 40 и преобразователь 35, а также дисплей 25 и другие компоненты/провода/детали внутри корпуса 55 от загрязнения. По отдельным вариантам осуществления, помимо уплотнения по периферийной части 65, у подложки 5 могут быть выводы (не показаны), соединенные в определенных местах, например, вблизи углов на задней поверхности 15, для крепления корпуса 55. По некоторым другим вариантам осуществления, рассматриваемым ниже со ссылкой на фигуры 6(а), 6(b) и 6(с), подложка 5 может быть соединена и/или скреплена с корпусом 55 посредством других крепежных изделий, таких как подрамник.
По одному из конкретных вариантов осуществления подложка 5 может быть листом из прокаленного стекла толщиной около 3 мм, термически закаленного или химически усиленного стекла. Номинальная тактильная область 13 находится на передней поверхности 10 подложки 5. По конкретному варианту осуществления плоская передняя поверхность 10 подложки не прерывается, а рамок на ней нет и не предусмотрено. В частности, следует отметить, что на передней поверхности 10 подложки нет отражающих структур или компонентов преобразователей.
По одному из конкретных вариантов осуществления сзади номинальной тактильной области 13 подложки 5 находится дисплей 25, который оптически связан в связующей области при помощи соответствующего связующего материала с задней поверхностью 15 подложки 5. Оптический связующий материал является акустически поглощающим, оптически прозрачным связующим материалом, таким как Optical Clear Adhesive 8171 фирмы ЗМ™. Оптический связующий материал является твердым материалом, плотно механически соприкасающимся с подложкой 5, а следовательно, он акустически поглощает любые посторонние волны Лэмба и/или поверхностные акустические волны, проходящие по задней поверхности 15, которые в противном случае распространялись бы между оппозитными парами отражающих структур 40. Дисплей 25 может быть, например, жидкокристаллическим дисплеем (ЖК), дисплеем на органических светодиодах (ОСД), электрофоретическим индикатором (EPD), вакуум-флуоресцентным, с электроннолучевой трубкой (ЭЛТ) или дисплеем другого типа. Как вариант, дисплей 25 может быть проекционным экраном с реверсивным отображением, который оптически связан с подложкой 5. По отдельным вариантам осуществления дисплей 25 необязательно может быть сопряжен с механическими опорами 67 для крепления к корпусу 55. По одним вариантам осуществления дисплей 25 может быть оптически не связан с подложкой 5, а вместо этого в нем могут использоваться механические опоры 67. По другим вариантам осуществления, рассматриваемым ниже со ссылкой на фигуры 6(а)-6(с), дисплей 25 может быть соединен и/или связан с корпусом 55 посредством других крепежных изделий, таких как подрамник, как это рассмотрено со ссылкой на фигуры 6(d)-6(h). По вариантам осуществления, где оптический связующий материал не используется, может быть желательным наносить слой оптически прозрачного и акустически поглощающего материала, например, путем нанесения противоосколочного материала или нанесения тонкого слоя полимерного материала методом трафаретной печати сзади номинальной тактильной области 13, на заднюю поверхность 15 подложки 5, таким образом, чтобы паразитные сигналы, создаваемые на нештатных траекториях волн Лэмба или поверхностных акустических волн между оппозитными парами отражающих структур 40, были сведены к минимуму или исключались.
На задней поверхности 15 подложки 5 расположены четыре отражающие структуры 40 и четыре клиновидных преобразователя 35 рэлеевских волн в компоновке, аналогичной, например, системе, изображенной на фигурах 2(а) и 2(b). Следует отметить, что по вариантам осуществления, где дисплей 25 оптически связан с задней поверхностью 15 подложки, нештатные акустические траектории на задней поверхности 15, между парами отражающих структур 40, блокируются акустически поглощающим, оптически связующим материалом дисплея 25.
По одному из конкретных осуществления, на фиг.6(а) показан вид частично в сечении угловой компоновки и схемы монтажа безрамочного акустического устройства с тактильным датчиком, а на фиг.6(b) показан вид частично в плане угловой компоновки и схемы монтажа безрамочного акустического устройства с тактильным датчиком по одному из конкретных вариантов осуществления изобретения. Как видно из фигур 6(а) и 6(b), в корпусе 55, который включает в себя подрамник или фланец 110, расположенный снизу подложки 5, находятся различные компоненты устройства 50 с тактильным датчиком. При виде в перспективе, без увеличения со стороны пользователя устройства может показаться, что вся верхняя поверхность 117 внешней части фланца 110 соприкасается с задней поверхностью 15 подложки 5. Между тем, на самом деле верхняя поверхность 117 внешней части фланца 110 отделена от поверхности 15 и между ними имеется воздушный зазор, за исключением отдельных точек, где на поверхности 117 фланца 110 образованы выступы 119. Выступы 119 используются в качестве разделителей между задней поверхностью 15 подложки 5 и фланцем 110. По одному из конкретных вариантов осуществления высота выступов составляет порядка 10 микрон, а сами они физически частично соприкасаются с задней поверхностью 15 подложки 5 лишь в отдельных точках, причем подобные контактные области недостаточны для того, чтобы вызывать сколь либо заметное поглощение поверхностных акустических волн, которое могло бы происходить, если поверхность 117 фланца 110 действительно соприкасалась бы с задней поверхностью 15. По отдельным вариантам осуществления в воздушном зазоре между поверхностью 15 и верхней поверхностью 117 может находиться акустически благоприятный уплотнитель периметра, такой как полоска из пенопласта с закрытыми порами или резиновая прокладка с сечением автомобильной щетки стеклоочистителя для защиты от попадания в корпус 55 загрязнителей или жидкостей, которые могут повредить дисплей 25 или находящиеся в нем электронные компоненты.
С использованием вида в сечении вдоль линии А-А' по фиг.6(b), на фиг.6(а) изображен периферийный скрепляющий слой 115 дисплея, при помощи которого дисплей 25 крепится к фланцу 110 корпуса 55, а также периферийный скрепляющий слой 120 подложки, при помощи которого тактильная подложка 5 крепится к фланцу 110 корпуса 55. По отдельным вариантам осуществления во фланце 110 корпуса 55 имеется вырез для размещения в нем преобразователя 35, который сопряжен с задней поверхностью 15 либо посредством акустического благоприятного слоя 60 (не показан), либо непосредственно. Периферийный скрепляющий слой 115 дисплея может быть двусторонней клейкой лентой, эпоксидным клеем или любым иным средством, обеспечивающим прочное механическое соединение, а периферийный скрепляющий слой 120 подложки может быть эпоксидным клеем, двусторонней клейкой лентой или любым иным средством, обеспечивающим прочное механическое соединение. Желательно, чтобы материал скрепляющего слоя 120 был акустически поглощающим, а также обладал присущей клею механической и структурной прочностью. По одному из конкретных вариантов осуществления в качестве скрепляющих слоев 115 и/или 120 достаточно использовать двустороннюю клейкую ленту шириной четыре миллиметра. На фиг.6(b), по одному из конкретных вариантов осуществления пунктирными линиями показаны две отражающие структуры 40 с целью иллюстрации их местоположения относительно преобразователей 35. В подобной монтажной компоновке выступы 119 не позволяют структурам 40 соприкасаться с фланцем 110. Следует отметить, что по данному варианту осуществления нештатные акустические траектории, которые в противном случае могли бы возникать на задней поверхности 15 между оппозитными парами отражающих структур 40, блокируются периферийным скрепляющим слоем 120 подложки.
На фиг.6(с) изображен вид частично в сечении другой угловой компоновки и схемы монтажа безрамочного акустического тактильного датчика по другому конкретному варианту осуществления. На фиг.6(с) сечение вдоль линии А-А' по фиг.6(b) не показано, однако показано сечение аналогичной области по данному конкретному варианту осуществления, где преобразователь 35 расположен сзади подложки 5, в угловой части, выше, чем в варианте осуществления по фиг.6(b). Аналогично варианту осуществления по фиг.6(а), в корпусе 55, который включает в себя подрамник или фланец 110, расположенный снизу подложки 5, находятся различные компоненты устройства 50 с тактильным датчиком. По данному варианту осуществления видно, что акустически благоприятный слой 60 находится между задней поверхностью 15 подложки 5 и преобразователем 35, а также отражающей структурой 40. Акустически благоприятный уплотнитель 121 периметра находится между слоем 60 и фланцем 110, выступая в качестве преграды для защиты от попадания в корпус загрязнителей или жидкостей, которые могут повредить дисплей 25 или находящиеся в нем электронные компоненты. По одному из конкретных вариантов осуществления уплотнитель 121 может быть полоской из пенопласта с закрытыми порами (например, пенопласта Volara™) или резиновой прокладкой с сечением автомобильной щетки стеклоочистителя. У дисплея 25 имеется кронштейн 123, установленный на нем при помощи рассмотренного выше скрепляющего слоя 115. Кронштейн 123 сопряжен с подложкой 5 при помощи акустически благоприятного слоя 60 посредством скрепляющего слоя 120. Кронштейн 123, который необязательно может быть сопряжен с корпусом 55 для усиления прочности соединения подложки 5, предназначен для физического (и/или электрического и/или акустического) изолирования любых кабелей или проводов 124 (обозначенных пунктирным кружком), идущих к тактильному датчику и/или к дисплею 25 от отражающих структур 40. Кронштейн 123 может иметь рамную конструкцию, изготовленную из металла, с вырезами (не показаны), таким образом, чтобы клиновидный преобразователь 35 и его соответствующая проводка могли проходить через вырез и прятаться за кронштейном 123. По данному варианту осуществления кронштейн 123 может соприкасаться с отражающими структурами 40, однако соприкосновение поверхности металлического материала не приводит к акустическому затуханию или другим интерференциям при прохождении поверхностных акустических волн. Подобная монтажная компоновка с использованием кронштейна 123 вполне позволяет осуществлять скрепление с дисплеем 25, имеющим узкую границу по периметру, а также необходимую изоляцию кабелей и/или проводов 124 при встраивании подложки 5, преобразователей 35, структур 40 и дисплея 25 внутрь корпуса 55.
На фиг.6(d) показан вид спереди безрамочного акустического тактильного датчика, являющегося частью другой системы, такой как информационный киоск, по отдельным конкретным вариантам осуществления. Например, безрамочный акустический тактильный датчик 1 может быть частью более крупной системы, такой как информационный киоск, у которого окантовка 57 проходит вокруг акустического тактильного датчика. Разумеется, если датчик 1 установлен сзади, являясь частью лицевой поверхности дисплея, то окантовка 57 может выходить за пределы периметра, как это показано на фиг.6(d). На фигурах 6(e)-6(h) показаны виды в сечении, в перспективе, по направлению стрелок В-В' на фиг.6(d), на данных видах отражающие структуры и преобразователи датчика 1 не показаны.
На фиг.6(е) изображен вид частично в сечении, в перспективе схемы уплотнения безрамочного акустического тактильного датчика, непосредственно перед монтажом заподлицо, являющегося частью более крупной системы, такой как информационный киоск, по одному из конкретных вариантов осуществления. На фиг.6(f) изображен вид частично в сечении, в перспективе схемы монтажа безрамочного акустического тактильного датчика, после установки, являющегося частью другой системы, такой как информационный киоск, по варианту осуществления, показанному на фиг.6(f). Для лучшего понимания схемы уплотнения тактильного датчика 1 с окантовкой 57, являющегося частью более крупной системы, на фигурах 6(e)-6(f) показана часть тактильной подложки 5 с имеющейся у нее передней поверхностью 10 и задней поверхностью 15 с нанесенным на ее периферийную область акустически благоприятным слоем 60, дисплеем 25, сопряженным с задней поверхностью 15 таким образом, чтобы изображения на дисплее были видны через подложку 5 в области 13. Изготовленная из эластомера или другого акустически благоприятного материала, прокладка 61 проходит вокруг и соприкасается с изогнутой соединительной поверхностью 20 вдоль периферийной части подложки 5. По конкретным вариантам осуществления прокладка 61 может быть изготовлена из экструдированного, пластичного силикона или жесткой резины. Перед монтажом прокладка 61 имеет профиль сечения автомобильной щетки стеклоочистителя с выступающей головной частью, которая соприкасается с верхней половиной изогнутой соединительной поверхности 20 подложки 5, а затем выходит наружу в виде кромки или фланца с направленной вниз корневой частью. Как видно из фигур 6(е) и 6(f), кронштейн 63 находится между правой стороной корневой части прокладки 61 и нижней половинчатой частью изогнутой соединительной поверхности 20, у периферийной части нижней поверхности 15 подложки 5 с нанесенным на нее слоем 60. Выполненный в виде окантовки, проходящей вокруг периферийной части подложки 5, кронштейн 63 может быть изготовлен из металла или пластика и предназначен для регулирования силы прижатия прокладки 61 к подложке 5. На кронштейн 63 нанесен двусторонний адгезив (не показан) для крепления к задней поверхности 15 подложки 5. Подобный адгезив находится с внутренней стороны (в направлении дисплея 25) от преобразователей и отражающих структур, находящихся на задней поверхности 15. Кронштейн 71, изготовленный из пружинной стали или другого пружинного металла также именуемый пружинным кронштейном, находится между левой стороной и низом корневой части прокладки 61 и, по меньшей мере, частью кронштейна 63. Кронштейн 71 выравнивает прокладку 61 относительно подложки 5 таким образом, чтобы она оставалась неподвижной даже после приложения давления. Совместно прокладка 61, кронштейн 71 и кронштейн 63 создают прочный и в то же время минимальный контакт с подложкой 5, с равномерным прижатием, обеспечивая хорошее уплотнение с целью защиты от влаги и от воздействия окружающей среды, сводя при этом к минимуму контактную область между прокладкой и подложкой, что исключает чрезмерное акустическое затухание акустических волн, распространяющихся вокруг изогнутых соединительных поверхностей 20. Кронштейн 73 прикреплен, по меньшей мере, к окантовочному кронштейну 63 при помощи двустороннего адгезива 81. Хотя на фигурах он показан лишь частично, понятно, что адгезив 81 также может быть расположен между нижней поверхностью пружинного кронштейна 71 и кронштейна 73. Кронштейн 77, который обычно соединен с окантовкой 57, регулируется по высоте при помощи паза, через который проходит обычный крепеж 79, такой как винт с гайкой (не показана), для соединения с кронштейном 73, в котором имеется отверстие или паз, накладываемый на паз или отверстие в кронштейне 77. Каждый из кронштейнов 73 и 77 может быть выполнен в виде окантовки, которая, в целом, пропорциональна периферийной части датчика 1, и/или несколько подобных кронштейнов могут быть расположены в разных местах вдоль периферийной части. Кронштейны 73 и 77 могут быть изготовлены из металла.
На фиг.6(g) и фиг.6(h) показаны виды частично в сечении, в перспективе двух других схем уплотнения безрамочного акустического сенсорного устройства, являющегося частью другой системы, такой как информационный киоск, по другим конкретным вариантам осуществления. Описание элементов, изображенных на фигурах 6(g)-6(h), аналогичное описанию по фигурам 6(e)-6(f), в данном случае повторяться не будет. Вариант осуществления по фиг.6(g) аналогичен варианту осуществления по фигурам 6(e)-6(f), за исключением окантовки 57', показанной лишь частично, толщина которой достаточно мала, например около 1 м в ширину, для того, чтобы она могла опираться на верхнюю часть прокладки 61 с профилем щетки стеклоочистителя, расположенной между подложкой 5 и окантовкой 57'. Кронштейны 77 и 73 могут быть сопряжены между собой при помощи разделителя 83 соответствующего размера (используемого по мере необходимости) с крепежом 79, обеспечивающим надлежащий монтаж тактильного датчика 1 в окантовке 57'. Вариант осуществления по фиг.6(h) также аналогичен вариантам осуществления по фигурам 6(e)-6(f), поскольку окантовка 57” может быть переменной толщины, за исключением, что данный вариант осуществления может использоваться даже в том случае, если края окантовки 57” будут шероховатыми, а не гладко отполированными краями. В варианте осуществления по фиг.6(h) часть прокладки 61 с профилем щетки стеклоочистителя может быть расположена сверху окантовки 57”, закрывая ее шероховатые края и обеспечивая хорошее уплотнение, а также другие преимущества, рассмотренные для других вариантов осуществления.
В конкретных вариантах осуществления по фигурам 2(а) и 2(b), рассмотренным выше, предлагается тактильный датчик с поверхностными акустическими волнами, проходящими по осям XY, способный определять касания в номинальной тактильной области 13, а также в периферийной области 14, расположенной снаружи тактильной области 13 на передней поверхности 10 и/или касания на изогнутой соединительной поверхности 20. Между тем, в случае касания периферийной области 14 или изогнутой соединительной области 20 тактильный датчик осей XY по данному конкретному варианту осуществления может определять лишь координату положения: либо координату оси X, либо координату оси Y. Лишь в случае, если определяется только координата оси Х при касании верхнего или нижнего краев соединительной поверхности 20, либо верхней или нижней частей периферийной области 14, или если определяется только координата оси Y при касании любого из бокового краев соединительной поверхности 20, либо любой из боковых частей периферийной области 14, требуется другая координата или данные по положению для устранения сомнений относительно того, в какой области (верхней, нижней, правой или левой) произведено касание. При использовании функций касания в краевой области по настоящему изобретению, по разным вариантам осуществления, рассматриваемым ниже, данная задача может быть решена различными путями. В настоящем описании под фразой «функция касания в краевой области» понимаются интерактивные функции касания, основанные на определении касаний, совершенных в периферийной области 14 и/или на изогнутой соединительной поверхности 20.
На фиг.7 показан вид в перспективе безрамочного акустического устройства 50 с тактильным датчиком, такого как сенсорный монитор с функцией касания в краевой области, с увеличением нижней правой угловой части, по конкретным вариантам осуществления изобретения. На фиг.7 показаны различные элементы, рассмотренные ранее для тактильного датчика 1 по фиг.1, а также тактильного датчика 50 по фиг.4, поэтому подобные элементы повторно рассматриваться здесь не будут. Разумеется, следует понимать, что в случае встраивания акустического тактильного датчика не в монитор, а в компьютер или портативное сенсорное устройство, опора 90 монитора больше не потребуется. Как видно из фиг.7, на которой показан вид с увеличением угловой части устройства 50 с тактильным датчиком, передняя поверхность и изогнутые соединительные поверхности 20а и 20b подложки 5 сопряжены с корпусом 55. Передняя поверхность включает в себя периферийную область 14 (снаружи от пунктирных линий, образующих номинальную тактильную область 13 (внутри пунктирных линий), расположенную на экране 25.
Отдельные функции касаний в краевой области можно обнаруживать путем определения касаний на соответствующей части периферийной области 14 или изогнутой соединительной поверхности 20. Другие функции касаний в краевой области можно обнаруживать путем определения совершаемого жеста. Что касается жеста, то после распознания первоначального касания на части периферийной области 14 или изогнутой соединительной поверхности 20 устанавливается, является ли время запаздывания возмущения в принимаемом поверхностном акустическом сигнале возрастающим при последовательном сканировании или убывающим при последовательном сканировании, свидетельствуя о том, что касание является жестом, таким как, например, скользящее или пролистывающее движение. Что касается жеста, то абсолютные координаты положения последовательных касаний могут быть не столь важны, если в соответствующей области функции касаний в краевой области после обнаружения первоначального касания наблюдаются временные возрастания или убывания.
По одному из конкретных вариантов осуществления в периферийной области 14 могут находиться различные пиктограммы или печатные кнопки, обозначенные, например, прямоугольником 95, прямоугольником 97, пиктограммой 101 и/или пиктограммой 103, являющиеся частью слоя 60 (который по разным вариантам осуществления может быть нанесен на заднюю поверхность 15 или переднюю поверхность подложки 5). Поскольку акустически благоприятный слой 60 может быть непрозрачным и состоять из нескольких цветов, включая черный, белый и/или других цветов, различные пиктограммы или рамки, обозначающие кнопки или другие функции касаний в краевой области 14, могут быть выполнены в соответствии с требованиями заказчика. Следовательно, касание, обнаруженное на определенной части периферийной области 14, приведет к выполнению выбранной функции, преобразуемой при помощи управляющего программного обеспечения и/или прошивки. Как вариант или как дополнение, касания обнаруженные на изогнутых соединительных поверхностях 20а и/или 20b могут использоваться для осуществления действий по выбранной функции. В случае использования возможностей касаний в краевой области соединительной поверхности 20 непосредственно на саму поверхность 20 может быть нанесен тонкий слой материала (аналогично слою 60) для обозначения соответствующей функции касаний в краевой области, либо на корпусе 55, находящемся вблизи соответствующей части соединительной поверхности 20 могут находиться печатные пиктограммы, такие как стрелка 105 вверх или стрелка 107 вниз, указывающие желаемое увеличение или уменьшение соответственно громкости устройства, яркости дисплея, контрастности дисплея либо иных заданных или конфигурируемых функций касаний в краевой области. Касание части поверхности 20, находящейся рядом со стрелками 105 и 107, может осуществлять скользящим движением для обеспечения скользящего управления параметрами устройства.
Кнопкам 95 и 97 могут быть присвоены определенные функции (такие как включение/отключение или выход из режима ожидания, либо другие операции) или подобные функции могут конфигурироваться пользователем или производителем устройства 50 при помощи конфигурационного программного обеспечения для привязывания определенной тактильной области к определенной функции. В качестве дополнительного примера, касание пиктограммы 101 (обозначенной в виде солнца, для настройки яркости экрана) в периферийной области 14 может сообщать контроллеру устройства о том, что в ближней части изогнутой соединительной поверхности 20 может быть осуществлено скользящее касание для увеличения или уменьшения яркости экрана. В качестве другого примера, касание пиктограммы 103 (обозначенной в виде полузатененного кружка, для настройки контрастности экрана) в периферийной области 14 может сообщать контроллеру устройства о том, что в ближней части изогнутой соединительной поверхности 20 может быть осуществлено скользящее касание для увеличения или уменьшения контрастности экрана. Понятно, что пиктограмма микрофона аналогичным образом может использоваться для регулировки громкости. Как вариант, стрелки 105 и 107 могут быть выполнены таким образом, чтобы касание двумя пальцами воспринималось как наезд или отъезд при масштабировании изображения на экране 25 либо пролистывание изображений на экране 25 и т.п.
Хотя в примере, показанном на фиг.7, в одном из углов устройства 50 показаны различные пиктограммы и кнопки, следует понимать, что для функции касаний в краевой области могут использоваться одна, все, либо комбинация из нескольких пиктограмм или кнопок. Например, по отдельным вариантам осуществления совсем не обязательно использовать одновременно стрелку 105 вверх и стрелку 107 вниз, достаточно использовать какую-то одну из них. Кроме этого, по разным вариантам осуществления функция касаний в краевой области по настоящему изобретению позволяет использовать множество других функций касаний в краевой области, помимо тех, что были рассмотрены выше. Следует отметить, что хотя на фиг.7 поверхность 20b и область 14b показаны с правой стороны устройства 50 (поскольку на фиг.7 показаны лишь отдельные примеры разных типов функций касаний в краевой области), на фигурах 11(a)-11(d) поверхность 20b и область 14b находятся с левой стороны устройства 50. Между тем, в зависимости от конкретного варианта осуществления поверхность 20b и область 14b на фиг.7 могут находиться с правой или с левой стороны устройства 50. То есть, по разным конкретным вариантам осуществления изобретения функции касаний в краевой области могут находиться в периферийной области 14 и/или на поверхности 20 в любом месте: сверху, снизу, справа или слева в любой комбинации.
Далее будут рассмотрены другие конкретные варианты осуществления по определению координат X-Y касаний в номинальной области 13 касания, принцип действия которых аналогичен принципу действия, рассмотренному выше со ссылкой на фигуры 2(а) и 2(b), поэтому их повторное описание даваться не будет. Аспекты подобных рассматриваемых вариантов осуществления направлены на получение другой координаты или дополнительных данных по положению для устранения сомнений относительно того, в какой области (верхней, нижней, правой или левой) произведено касание при использовании функции касаний в краевой области по настоящему изобретению.
На фиг.8(а) и фиг.8(b) соответственно показаны виды спереди и сзади подложки 5 акустического тактильного датчика по одному из конкретных вариантов осуществления изобретения. На фиг.9(а) и фиг.9(b) соответственно показаны виды спереди и сзади подложки 5 другого акустического тактильного датчика по другому конкретному варианту осуществления. На фиг.10(а) и фиг.10(b) соответственно показаны виды спереди и сзади подложки 5 акустического тактильного датчика по дополнительному конкретному варианту осуществления. Так же как и на фигурах 2(а) и 2(b) преобразователи 35 на фигурах 8(а), 9(а) и 10(а) показаны пунктирными линиями, образуя ссылочную окантовку соответственно для фигур 8(b), 9(b) и 10(b), на которых показаны виды в плане задней поверхности 15 акустического тактильного датчика, где преобразователи 35 показаны сплошной линией. Для создания дополнительной ссылочной окантовки на фигурах 8(а), 8(b), 9(а), 9(b), 10(а) и 10(b) показаны оси координат X-Y, a также, по возможности, ось U координат. Координата оси U является координатой, находящейся в той же плоскости, что оси Х и Y, но проходит в наклонном направлении. Измерение координат касаний по осям X, Y и U обеспечивает определенную степень избыточности при измерении положений, которая необходима для высокопроизводительных приложений с двойным касанием или множеством одновременных касаний. Как будет рассмотрено ниже, возможность измерений по дополнительной оси U координат обеспечивает дополнительные преимущества для безрамочных акустических сенсорных устройств.
На фиг.8(а) и фиг.8(b) соответственно показаны виды спереди и сзади подложки 5 акустического тактильного датчика по одному из конкретных вариантов осуществления изобретения. Вариант осуществления по фигурам 8(а) и 8(b) структурно аналогичен и функционирует аналогично способу определения касаний в номинальной тактильной области 13, рассмотренному выше для фигур 2(а) и 2(b). Далее будет рассмотрены дополнительные аспекты конкретных вариантов осуществления по фигурам 8(а) и 8(b). По данному конкретному варианту осуществления, в отличие от вариантов осуществления по фигурам 2(а) и 2(b), используются четыре делителя 75 пучков, расположенных на передней поверхности подложки 5. Таким образом, в конкретном варианте осуществления по фигурам 8(а) и 8(b) используется ось U координат для получения тактильного датчика акустических волн, способного точно определять многочисленные касания в номинальной тактильной области 13, в периферийной области 14 передней поверхности 10, снаружи тактильной области 13, и/или касания на изогнутой соединительной поверхности 20. Функции касаний в краевой области могут быть реализованы в периферийной области 14 и/или на изогнутой соединительной области 20.
Как видно из фигур 8(а) и 8(b), делители 75 пучков преломляют часть падающего пучка поверхностных акустических волн в направлении, перпендикулярном координате U, оставляя при этом другую часть непреломленной. Делители 75 пучков могут быть выполнены на передней поверхности подложки 5, например, при помощи трафаретной печати стеклоприпоя или чернил из композитного полимерного материала либо, как вариант, за счет вытравливания канавок. У каждого делителя 75 пучков имеется множество преломляющих элементов, которые могут быть параллельными отражающими сегментами, повернутыми на определенный угол (для системы с заданным соотношением сторон, например 4:3) относительно вертикали и разнесенными вдоль оси делителя пучков на межосевое расстояние, равное длине поверхностной акустической волны, поделенной на синус разницы 90 градусов и определенного угла. У преломляющих элементов верхнего и нижнего делителей 75b и 75с пучков имеется первый заданный угол, а у преломляющих элементов боковых делителей 75а и 75d пучков имеется второй заданный угол (отличающийся от первого заданного угла). Акустическая волна, падающая на преломляющий элемент делителя пучка, когерентно отражается на заданный угол относительно оси делителя пучка, причем угол отражения равен углу падения. Следует понимать, что по другим вариантам осуществления угол преломляющего элемента делителя пучка может быть иным в зависимости от геометрических размеров подложки и соотношения сторон, дополнительные детали, относящиеся к подобным делителям пучков акустических волн можно найти со ссылкой, по меньшей мере, на фигуры 4-6 опубликованной патентной заявки США 2008/0266266А1, полное содержание которой включено здесь по ссылке. Угол, проходящий перпендикулярно заданному углу преломляющих элементов делителей 75а и 75d пучков, определяет ось U координат.
Следует отметить, что по отдельным вариантам осуществления использование открытых делителей 75 пучков на передней поверхности 10 подложки 5 может быть нежелательным из эстетических соображений и может приводить к возникновению проблем, связанных с долговечностью и износостойкостью. В случае использования керамических фритт возникает вероятность, что открытые фритты делителей 75 пучков могут быть растворены кислотой, содержащейся к прохладительных напитках, и потенциально могут привести к заражению пользователей свинцом. Если делители 75 пучков изготовлены из фритты на основе свинца, то может быть желательно укрыть их уплотнителем. Как вариант, могут использоваться материалы, не содержащие свинца, в том числе композитные полимерные чернила или фритты из бессвинцовых материалов с более высокой температурой вулканизации, а также подвергнутые абляции канавки, которые в идеальном случае заполнены фриттой или иным материалом.
Во время использования, часть поверхностного акустического пучка, отражающаяся от передающего преобразователя 35а структурой 40а, проходя вокруг изогнутой соединительной поверхности 20 и падая на делитель 75а пучка, частично преломляется (пучок U1) вдоль линии постоянной координаты U, тогда как непреломляющаяся часть продолжает следовать, как это было описано ранее, для определения оси Y координат касания. Как показано пунктирными линиями, указывающими траектории движения зондирующей волны U на фигурах 8(а) и 8(b), частично преломляемая часть пучка U1 проходит вдоль линии постоянной координаты U на передней поверхности 10 и падает на делитель 75b пучка, который преломляет часть пучка вокруг изогнутой соединительной поверхности 20 к задней поверхности 15, где отражающая структура 40d отражает часть пучка на принимающий преобразователь 35d. Таким образом, принимающий преобразователь 35d, помимо того, что он является принимающим преобразователем для сигнала оси Х координат, также выступает в качестве принимающего преобразователя для сигнала U1. Сигнал U1 измеряет координату U для одной части тактильной области.
Аналогичным образом, часть поверхностного акустического пучка, отражающаяся от передающего преобразователя 35b структурой 40b, проходя вокруг изогнутой соединительной поверхности 20 и падая на делитель 75с пучка, частично преломляется (пучок U2) вдоль линии постоянной координаты U, тогда как непреломляющаяся часть продолжает следовать, как это было описано ранее, для определения оси Х координат касания. Как показано пунктирными линиями, указывающими траектории движения зондирующей волны U на фигурах 8(а) и 8(b), частично преломляемая часть пучка U2 проходит вдоль линии постоянной координаты U на передней поверхности 10 и падает на делитель 75d пучка, который преломляет часть пучка вокруг изогнутой соединительной поверхности 20 к задней поверхности 15, где отражающая структура 40b отражает часть пучка на принимающий преобразователь 35с. Таким образом, принимающий преобразователь 35с, помимо того, что он является принимающим преобразователем для сигнала оси Y координат, также выступает в качестве принимающего преобразователя для сигнала U2. Сигнал U2 измеряет координату U для одной части тактильной области, не охваченной сигналом U1.
Системный контроллер анализирует принятые сигналы по временной оси для определения указанных координат касания (это происходит когда траектории движений, показанные на фиг.2(а), пересекаются) внутри номинальной области касания 13 на передней поверхности 10. Кроме этого, системный контроллер анализирует принятые сигналы по временной оси для определения координат любых касаний, совершенных в периферийной области 14 передней поверхности 10 или на соединительной поверхности 20 на основании траекторий движения, показанных на фигурах 8(а) и 8(b). Таким образом, использование сигнала координаты U не только обеспечивает избыточность координатного измерения для интенсивных касаний, но также позволяет контроллеру устройства распознавать функции касаний в краевой области, в случае их использования.
На фиг.9(а) и фиг.9(b) соответственно показаны виды спереди и сзади подложки 5 акустического тактильного датчика по дополнительным, конкретным вариантам осуществления изобретения. Вариант осуществления по фигурам 9(а) и 9(b) структурно аналогичен и функционирует аналогично способу определению касаний в номинальной тактильной области 13, рассмотренному выше для фигур 2(а) и 2(b), поэтому его описание повторяться не будет. Вместо этого будут рассмотрены дополнительные аспекты конкретного варианта осуществления по фигурам 9(а) и 9(b). Для создания дополнительной ссылочной рамки, на фигурах 9(а) и 9(b) показаны оси координат X-Y-U. По данному конкретному варианту осуществления, в отличие от вариантов осуществления по фигурам 2 (а) и 2(с), а также фигурам 8(а) и 8(b), используются четыре делителя 85 пучков, расположенные на задней поверхности 15 подложки 5. Таким образом, в конкретных вариантах осуществления по фигурам 9(а) и 9(b) предлагается другой пример тактильного датчика поверхностных акустических волн по осям XYU, способного гарантированно определять многочисленные касания в номинальной области 13 касания, а также распознавать касания на изогнутых соединительных поверхностях 20 или в периферийной области 14, которые могут быть связаны с тактильным вводом краевых функций, как это было рассмотрено выше.
Аналогично делителям 75 пучков, рассмотренным выше, делители 85 пучков преломляют часть падающего пучка поверхностных акустических волн в направлении оси U, оставляя при этом другую часть непреломленной. По данному конкретному варианту осуществления делители 85 пучков могут быть выполнены на задней поверхности 15 (непосредственно, без слоя 60 либо посредством слоя 60 в зависимости от варианта осуществления) подложки 5. По конкретным вариантам осуществления при размещении делителей 85 пучков на задней поверхности 15 не возникает проблем с эстетическим видом, долговечностью и/или безопасностью, поскольку открытые фритты делителей пучков защищены корпусом 55.
Во время использования, часть поверхностного акустического пучка, отражающаяся от передающего преобразователя 35а структурой 40а, падает в направлении отрицательной (-) оси Х на делитель 85а пучка, частично преломляется (пучок U1) и проходит вокруг изогнутой соединительной поверхности 20, вдоль линии постоянной координаты U, тогда как непреломляющаяся часть продолжает следовать, как это было описано ранее, для определения оси Y координат касания. Как показано пунктирными линиями, указывающими траектории движения зондирующей волны U на фигурах 9(а) и 9(b), частично преломляемая часть пучка U1 проходит вдоль линии с постоянной величиной U на передней поверхности 10, вокруг изогнутой соединительной поверхности 20 к задней поверхности 15 и падает на делитель 85b пучка, который преломляет часть пучка в направлении отрицательной (-) оси Y на отражающую структуру 40d, которая отражает часть пучка в направлении положительной (+) оси Х на принимающий преобразователь 35d. Таким образом, принимающий преобразователь 35d, помимо того, что он является принимающим преобразователем для сигнала оси Х координат, также выступает в качестве принимающего преобразователя для сигнала U1.
Аналогичным образом, часть поверхностного акустического пучка, отражающаяся от передающего преобразователя 35b структурой 40с, падает в направлении отрицательной (-) оси Y на делитель 85с пучка, частично преломляется (пучок U2) и проходит вокруг изогнутой соединительной поверхности 20, вдоль линии с постоянной величиной U, тогда как непреломляющаяся часть продолжает следовать, как это было описано ранее, для определения оси Х координат касания. Как показано пунктирными линиями, указывающими траектории движения зондирующей волны U на фигурах 9(а) и 9(b), частично преломляемая часть пучка U2 проходит вдоль линии с постоянной величиной U на передней поверхности 10, вокруг изогнутой соединительной поверхности 20 к задней поверхности 15 и падает на делитель 85d пучка, который преломляет часть пучка в направлении отрицательной (-) оси Х на отражающую структуру 40b, которая отражает часть пучка в направлении положительной (+) оси Х на принимающий преобразователь 35с. Таким образом, принимающий преобразователь 35с, помимо того, что он является принимающим преобразователем для сигнала оси Y координат, также выступает в качестве принимающего преобразователя для сигнала U2.
Контроллер системы анализирует принимаемые сигналы по временной оси для определения указанных координат касания (это происходит в том случае, когда траектории движения, показанные на фиг.2(а), пересекаются) в пределах тактильной области 13 на передней поверхности. Кроме этого, контроллер системы анализирует принимаемые сигналы по временной оси для определения указанных координат любых касаний, совершенных в периферийной области 14 на передней поверхности 10 или соединительной поверхности 20 на основании траекторий движения, показанных на фигурах 9(а) и 9(b).
Дополнительные детали разных типов тактильных датчиков XYU-типа рассмотрены, например, в раскрытиях патента США 5854450 и опубликованной патентной заявки США 2008/0266266, которые включены здесь по ссылке. В другом примере акустического тактильного датчика адлеровского типа для дополнительного уменьшения количества преобразователей могут использоваться сложенные акустические траектории, как это, например, описано в патентах США 4700176; 5072427; 5162618; и 5177327; каждый из которых включен здесь по ссылке. Следует понимать, что настоящее изобретение может быть обобщено для подобных различных типов тактильных датчиков XYU-типа или тактильных датчиков с уменьшенным количеством преобразователей. Например, по конкретным вариантам осуществления изобретения могут использоваться тактильный датчик XYU-типа со структурой U, наложенной на структуры отражающих элементов X-Y, или тактильный датчик XYU-типа с отдельными отражающими структурами и смежными делителями пучков.
На фиг.10(а) и фиг.10(b) соответственно показаны виды спереди и сзади подложки 5 акустического тактильного датчика по другим дополнительным конкретным вариантам осуществления изобретения. Вариант осуществления по фигурам 10(а) и 10(b) структурно аналогичен и функционирует аналогично способу определения касаний в номинальной тактильной области 13, рассмотренному выше для фигур 2(а) и 2(b). Далее будут рассмотрены дополнительные аспекты конкретных вариантов осуществления по фигурам 10(а) и 10(b). Для создания дополнительной ссылочной окантовки на фигурах 10(а) и 10(b) показаны оси координат X-Y-U. По данному конкретному варианту осуществления, в отличие от вариантов осуществления по фигурам 2(а) и 2(с), а также по фигурам 9(а) и 9(b), используются лишь два делителя 85 пучков, расположенных на задней поверхности 15 подложки 5. Таким образом, в конкретных вариантах осуществления по фигурам 10(а) и 10(b) предлагается тактильный датчик поверхностных акустических волн по осям XY, способный определять касания в номинальной области 13 касания, а также распознавать касания на изогнутой соединительной поверхности 20 или в периферийной области 14, которые могут быть связаны с тактильным вводом краевых функций, как это было рассмотрено выше.
По данному конкретному варианту осуществления на задней поверхности 15 подложки 5 выполнены лишь два делителя 85 пучков (по разным вариантам осуществления непосредственно без слоя 60 или посредством слоя 60).
Во время использования, часть поверхностного акустического пучка, отражающаяся от передающего преобразователя 35а структурой 40а, проходит в направлении отрицательной (-) оси X, проходит вокруг изогнутой соединительной поверхности 20 и далее, как это было рассмотрено ранее, для определения оси Y координат касания. Как показано пунктирными линиями, указывающими траектории движения зондирующей волны U на фигурах 10(а) и 10(b), используются два пучка U (аналогично пучку U2, рассмотренному со ссылкой на фигуры 9(а) и 9(b), но с другими величинами U) для того, чтобы показать общий диапазон величин U вдоль нижней изогнутой соединительной поверхности 20а и боковой соединительной поверхности 20b. Часть поверхностного акустического пучка, отражающаяся от передающего преобразователя 35b структурой 40с, падает в направлении отрицательной (-) оси Y на делитель 85с пучка, частично преломляется и проходит вокруг изогнутой соединительной поверхности 20а, вдоль линии с постоянной величиной U, тогда как непреломляющаяся часть продолжает следовать, как это было описано ранее, для определения оси Х координат касания. Частично преломляемая часть пучка U проходит вдоль линии с постоянной величиной U на передней поверхности 10, вокруг изогнутой соединительной поверхности 20b к задней поверхности 15 и падает на делитель 85d пучка, который преломляет часть пучка в направлении отрицательной (-) оси Х на отражающую структуру 40b, которая отражает часть пучка в положительном направлении (+) оси Х на принимающий преобразователь 35с. Таким образом, принимающий преобразователь 35с, помимо того, что он является принимающим преобразователем для сигнала оси Y-координат, также выступает в качестве принимающего преобразователя для сигнала оси U-координат.
Контроллер системы анализирует принимаемые сигналы по временной оси для определения указанных координат касания (это происходит в том случае, когда траектории движения, показанные на фиг.2(а), пересекаются) в пределах тактильной области 13 на передней поверхности. Кроме этого, контроллер системы может анализировать принимаемые сигналы по временной оси для определения указанных координат любых касаний, совершенных в периферийной области 14а и/или 14b на передней поверхности 10 или соединительной поверхности 20а и/или 20b, на основании траекторий движения, показанных на фигурах 10(а) и 10(b). В частности, наличие U сигнала на поверхности 20а или в области 14а, связанного лишь с обнаруженным сигналом по оси Х координат (т.е. сигнал по оси Y координат не обнаружен), позволяет задействовать функцию касаний в краевой области там, где имеется сигнал U. Если сигнал U, связанный лишь с обнаруженным сигналом по оси Х координат на поверхности 20а или в области 14а отсутствует, то контроллер устройства сможет определить, что функция касаний в краевой области относится к области 14d или к поверхности 20d. Устройство аналогичным образом может определить, что обнаруженные функции касаний в краевой области относятся к области 14b или 20b, а не к области 14с или 20с по отсутствию или наличию U сигнала, связанного лишь с сигналом оси Y координат (т.е. сигнал по оси Х координат не обнаружен).
Разумеется, следует понимать, что по другим вариантам осуществления использование двух делителей пучков (85b и 85а, как это показано на фиг.9(b)) на задней поверхности 15 может отличаться от тех (85с и 85d), что показаны на фигурах 10(а) и 10(b) таким образом, чтобы можно было распознать отдельные изогнутые соединительные поверхности 20 (расположенные оппозитно относительно 20а и 20b), а также их соответствующие ближние части периферийно области 14 с целью использования функций касаний в краевой области.
Кроме этого, следует понимать, что вариант осуществления по фигурам 8(а)-8(b), с использованием четырех делителей пучков на передней поверхности 10, может быть изменен для получения другого варианта осуществления, по которому на передней поверхности 10 используется два делителя пучков (75а и 75b либо 75с и 75d) (аналогично варианту осуществления по фигурам 10(а)-10(b), где используется два делителя (85с и 85d) пучков на задней поверхности 15) для обеспечения функции касаний в краевой области при помощи другого датчика осей XY. Также следует понимать, что по другому конкретному варианту осуществления использование делителей пучков, выступающих лишь частично вдоль периферийного углового края датчика (например, 85d и 85с усечены таким образом, чтобы вблизи угла рядом с преобразователем 35b были образованы лишь сегменты 85d и 85с), а не по всей длине ближних отражающих структур приведет всего лишь к тому, что части области 14 и/или поверхностей 20а и 20b с функциями касаний в краевой области будут пространственно ограничены областями, обозначенными скобками 87. То же самое произойдет, если делители 75d и 75с пучков по вариантам осуществления, показанным на фигурах 8(а) и 8(b), были бы аналогичным образом усечены. То есть функции касаний в краевой области будут пространственно ограничены нижним правым углом периферийной части 14 и соединительной поверхностью 20, как это показано на фиг.7. По другому варианту осуществления можно изменить варианты осуществления по фигурам 8, 9 или 10 для использования лишь одного делителя 75 или 85 пучков вдоль одного края (например, сверху, слева, справа или снизу) подложки 5, таким образом, чтобы, по меньшей мере, одна периферийная область 13 и/или ее соответствующая изогнутая соединительная поверхность 20 были снабжены функциями касаний в краевой области.
Для упрощения восприятия фиг.7, рассматриваемые и/или изображенные функции касаний в краевой области показаны расположенными на боковой изогнутой соединительной поверхности 20b и нижней изогнутой соединительной поверхности 20а и/или участках периферийной области 14, расположенных рядом с поверхностями 20а и 20b. Между тем, следует подчеркнуть, что по разным вариантам осуществления функции касаний в краевой области у устройства 50 могут быть реализованы в любом месте изогнутой соединительной поверхности 20 и/или периферийной области 14. Это объясняется тем, что сигнал оси U координат используется совместно с координатой оси Х или координатой оси Y для определения тактильного ввода, связанного с любой из функций касаний в краевой области.
На фигурах 11(а), 11(b), 11(с) и 11(d) изображен другой конкретный вариант осуществления акустического датчика осей XY, позволяющий устранить сомнения относительно частей периферийной области 14 (но не изогнутой соединительной поверхности 20). Данный вариант осуществления не измеряет координату оси U, а скорее продлевает сигналы по координате Х или координате Y для определения касаний на частях периферийной области 14. По данному конкретному варианту осуществления положение отражающих структур 40 и преобразователей 35 изменено по сравнению с положениями, показанными на фигурах 2(а) и 2(b). В частности, преобразователи 35а и 35с перемещены в направлении отрицательной (-) оси Y, а преобразователи 35b и 35d перемещены в направлении отрицательной (-) оси X. Кроме этого, отражающая структура 40d проходит над преобразователем 35а, отражающая структура 40b находится сзади преобразователя 35b, а отражающие структуры 40а и 40с соединяются в угловом месте их пересечения. То есть у двух отражающих структур имеется общий отражающий элемент.
При определении данных по осям XY для касаний в номинальной области 13 касания, данный конкретный вариант осуществления, показанный на фигурах 11(a)-11(d), функционирует аналогично рассмотренному ранее по фигурам 2(а)-2(b), поэтому повторное его описание даваться не будет. Фигуры 11(а) и 11(b) можно использовать для описания операций касаний краевых функций в периферийной области 14а (при касании изогнутой соединительной поверхности 20а существуют сомнения, поскольку при этом формируется такой же сигнал, как и при касании верхней части изогнутой соединительной поверхности 20). На фигурах 11(а) и 11(b) показаны (сплошными стрелками) возможные траектории движения акустических волн для определения координаты Х касания в номинальной тактильной области 13 (аналогично тому, как это показано на фиг.2(а)), а также координаты Х для касания в периферийной области 14b. В частности, поверхностные акустические волны проходят от передающего преобразователя 35b в направлении отрицательной (-) оси X, на которой, рядом с периферийным краем задней поверхности 15 подложки 5, находится отражающая структура 40 с. Как видно из фигур 11(а) и 11(b), где сплошными стрелками относительно оси Х координат указана траектория движения зондирующей волны, отражающая структура 40с связывает или отражает часть акустических волн с зондирующей волной: следующей от отражающей структуры 40с наружу, вдоль отрицательной (-) оси Y в направлении и вокруг ближней соединительной поверхности 20а подложки 5, следующей в направлении положительной (+) оси Y по передней поверхности, следующей в сторону и вокруг противоположной изогнутой соединительной поверхности 20 к отрицательной оси (-) Y, в направлении отражающей структуры 40d на задней поверхности 15, а также следующей вдоль отражающей структуры 40d в направлении положительной (+) оси X, на принимающий преобразователь 35d.
Фигуры 11(с) и 11(d) могут использоваться для описания операций касания краевых функций в периферийной области 14b (При касании изогнутой соединительной поверхности 20b возникают сомнения, поскольку формируется такой же сигнал, как и при касании противоположной части изогнутой соединительной поверхности 20). На фигурах 11(с) и 11(d) показаны (сплошными стрелками) возможные траектории следования акустических волн для определения координаты Y касания в номинальной тактильной области 13 (аналогично тому, как это показано на фиг.2(а)), а также координаты Y для касания в периферийной области 14b. В частности, поверхностные акустические волны проходят от передающего преобразователя 35а в направлении отрицательной (-) оси Y, на которой, рядом с периферийным краем задней поверхности 15 подложки 5 находится отражающая структура 40а. На фигурах 11(с) и 11(d) сплошными стрелками относительно оси Y координат указаны траектории движения зондирующей волны, отражающая структура 40а отражает часть акустических волн с зондирующей волной: следующей от отражающей структуры 40а наружу, вдоль отрицательной (-) оси Х в направлении и вокруг ближней соединительной поверхности 20b подложки 5, следующей в направлении положительной (+) оси Х по передней поверхности, следующей в сторону и вокруг противоположной изогнутой соединительной поверхности 20 и падающей в направлении отрицательной оси (-) Х на отражающую структуру 40b на задней стороне 15, а также следующей вдоль отражающей структуры 40b в направлении положительной (+) оси Y, на принимающий преобразователь 35с.
Контроллер системы анализирует принимаемые сигналы по временной оси для определения указанных координат касания (это происходит в том случае, когда траектории движения, показанные на фиг.2(а), пересекаются) в пределах тактильной области 13 на передней поверхности. Контроллер системы также анализирует принимаемые сигналы по временной оси для определения указанных координат любых касаний, совершенных в периферийной области 14а и/или 14b на передней поверхности 10 или соединительной поверхности 20а и/или 20b, на основании траекторий движения, показанных на фигурах 11(а)-11(d).
Следовательно, конкретные варианты осуществления по фигурам 11(a)-11(d) позволяют получить периферийную область 14а и/или периферийную область 14b (снизу и слева от пунктирных линий 100), снаружи номинальной тактильной области 13, позволяющие осуществлять обработку функций касания в краевой области.
На фиг.12(а) и фиг.12(b) изображен другой конкретный вариант осуществления акустического датчика осей XY, использующего дополнительные данные координат или положений совместно с координатой оси Х или координатой оси Y, связанные с акустически определяемым касанием в периферийной области 14 и/или на изогнутой соединительной поверхности 20. По данному конкретному варианту осуществления положение отражающих структур 40 и преобразователей 35 не изменилось по сравнению с фигурами 2(а) и 2(b), но добавился один или несколько зондирующих слоев 103 для получения дополнительных данных по положению. При определении данных по осям XY для касания в номинальной области 13 касания, данный конкретный вариант осуществления, показанный на фигурах 12(а)-12(b), функционирует аналогично варианту, рассмотренному ранее по фигурам 2(а)-2(b), поэтому его описание повторно даваться не будет.
Регистрируемое сигнальными электродами 103 устройства 50 изменение емкости (или, по отдельным вариантам осуществления, омического сопротивления) в результате касания в периферийной области 14 и/или на соединительной поверхности 20, позволяет получить дополнительные данные по положению, которые используются совместно с акустически определяемым касанием для осуществления функций касаний в краевой области. То есть по отдельным вариантам осуществления электродный слой 103 может использоваться в качестве емкостного сигнального электрода, а по другим вариантам осуществления электродный слой 103 может использоваться в качестве омического сигнального электрода.
На фиг.12(а) (пунктирными линиями) показана возможная компоновка сигнальных электродных слоев 103 по конкретным вариантам осуществления. Хотя на фиг.12(а) показано, что электродные слои 103 находятся на передней поверхности 10, следует отметить, что это касается лишь отдельных конкретных вариантов осуществления. В подобных вариантах осуществления, когда сигнальный электродный слой 103 находится на передней поверхности 10, слой 103 (используемый в качестве емкостного или омического сигнального электрода) предпочтительно является прозрачным, например, изготовленным из оксида индия и олова либо иного известного прозрачного проводящего материала, который может быть нанесен на переднюю поверхность 10 методом трафаретной печати или напылением. По другим вариантам осуществления слой 103 (используемый в качестве емкостных сигнальных электродов) может быть нанесен на заднюю поверхность 15 непосредственно (либо посредством слоя 60), таким образом, чтобы он находился между подложкой 5 и расположенными на ней преобразователями/структурами/делителями пучков. Если слой 60 не используется, то электродный слой 103 может быть изготовлен из прозрачного проводящего материала, а если слой 60 используется, то электродный слой 103 может быть непрозрачным или быть изготовлен из проводящего материала любого типа, являющегося акустически благоприятным, такого как металлосодержащий материал, который может быть нанесен методом трафаретной печати или напылением на слой 60. По другому конкретному варианту осуществления, если электрод 103 образован в слое 60, на задней поверхности 10 подложки, как это показано на фиг.12(с), где представлен вид при увеличении, частично в плане угла задней поверхности 15 подложки 5, отражающие элементы 125 отражающей структуры 20 (делители 85 пучков могут использоваться, но для упрощения восприятия на данной фигуре не показаны) сопряжены, по меньшей мере, с одним проводящим проводом 127. По данному варианту осуществления содержащие серебро стеклянные фритты 125 структуры 20 выступают не только в качестве отражающей структуры, но также, вместе с проводом 127, в качестве электрода 103 (обозначенного пунктирно-точечной линией), используемого для емкостного зондирования. Провод 127 может быть сделан из любого проводящего материала, являющегося акустически благоприятным, например, в виде тонкой линии из того самого же материала, который используется для изготовления отражающих элементов 125. По другому аналогичному варианту осуществления отражающие элементы 125 отражающей структуры 20 сопряжены с проводящим проводом 127, а также, необязательно, с другим аналогичным проводом (не показан), проходящим вдоль противоположного торца отражающих элементов 125.
Хотя на фиг.12(а) показаны четыре электрода: 103а, 103b, 103с и 103d, следует понимать, что для получения дополнительных данных о положении, с целью устранения сомнений при реализации функций касаний в краевой области на соединительной поверхности 20 и/или в периферийной области 14 будет достаточно и двух емкостных электродов (103а и 103b, либо 103а и 103d, либо 103b и 103с, либо 103d и 103с). По отдельным вариантам осуществления, возможно использование, по меньшей мере, одного электрода (для емкостного или омического зондирования), причем фронтальные тактильные функции реализуются лишь на периферийной поверхности 13 и/или на соответствующей ей изогнутой соединительной поверхности 20, а по отдельным вариантам осуществления могут использоваться свыше четырех емкостных электродов 103 за счет деления электродов 103 на электроды более мелкого размера, хотя в этом случае электрическая схема соединения подобных электродов 103 станет более сложной. Также следует понимать, что использование по другому конкретному варианту осуществления двух емкостных электродов 103, проходящих лишь частично вдоль периферийного углового края датчика (например, 103а и 103b усечены таким образом, чтобы вблизи угла рядом с преобразователем 35b были образованы лишь части 103а и 103b), а не по всему периферийному краю датчика, приведет к тому, что части области 14 и/или поверхностей 20а и 20b с функциями касаний в краевой области будут пространственно ограничены областями, обозначенными скобками 105.
Контроллер системы анализирует принимаемые сигналы по временной оси для определения указанных координат касания (это происходит в том случае, когда траектории движения, показанные на фиг.2(а), пересекаются) в пределах тактильной области 13 на передней поверхности. Касания снаружи номинальной тактильной области 13 определяются и однозначно распознаются как касания сверху, снизу, слева или справа за счет использования комбинации из акустических и емкостных (или омических) измерений. Контроллер системы, который также сопряжен с емкостными электродами 103, анализирует принимаемые сигналы для определения наличия касания вблизи одного из электродов 103, указывая касание с координатами в периферийной области 14 на передней поверхности 10 и/или на соединительной поверхности 20. Это позволяет установить является ли касание направленным вверх, вниз, вправо или влево. Координата вдоль выбранных сторон периметра основана на траекториях следования акустических пучков, показанных на фигурах 11(а)-11(d).
Были рассмотрены и показаны различные аспекты устройств с тактильными датчиками по конкретным вариантам осуществления. Между тем, после ознакомления с настоящим описанием изобретения и прилагаемыми чертежами, где раскрываются предпочтительные варианты его осуществления, специалистам в данной области техники будут очевидны различные изменения, модификации, вариации, комбинации, подкомбинации, а также иные варианты использования и применения предмета изобретения. Например, хотя в вариантах осуществления на фигурах показано, что изогнутая соединительная поверхность 20 проходит по всей периферийной части подложки 5, по другим вариантам осуществления могут использоваться две изогнутые поверхности 20, расположенные оппозитно друг другу, если функции касаний в краевой области реализованы не более чем лишь в двух соответствующих периферийных областях 14 и/или не более чем на двух соответствующих соединительных поверхностях 20. Также, например, изогнутая соединительная поверхность 20 может быть образована вдоль большей части края подложки 5, за исключением углов, где передняя поверхность 10 и задняя поверхность 15 соединяются острыми краями и где могут использоваться угловые безрамочные крышки. По другому конкретному варианту осуществления, у подложки 5, на которой находится один преобразователь 35 (выступающий одновременно в качестве передатчика и приемника) и одна отражающая структура 40, образованная на задней поверхности 15, может быть одна изогнутая соединительная поверхность 20, расположенная оппозитно поверхности с острыми краями таким образом, чтобы поверхностные акустические волны, передаваемые с преобразователя 35 отражались отражающей структурой 40, проходили вокруг изогнутой соединительной поверхности 20, а также вокруг передней поверхности 10, преломлялись на поверхности с острыми краями, проходили назад через переднюю поверхность 10, а также вокруг изогнутой соединительной поверхности 20 и отражались отражающей структурой 40 назад на преобразователь 35, который принимает поверхностные акустические волны. В подобном варианте осуществления функции касаний в краевой области могут быть реализованы лишь вдоль одной периферийной области 13 и/или одной из соответствующих изогнутых соединительных поверхностей 20.
Считается, что эти и другие изменения, модификации, вариации, а также другие варианты использования и применения по различным вариантам осуществления, не выходящие за объем и сущность изобретения, являются частью изобретения и ограничены лишь формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕНСОРНОЕ ДИСПЛЕЙНОЕ УСТРОЙСТВО | 2004 |
|
RU2363991C2 |
| УСТРОЙСТВО ФОТОТЕРАПИИ С ВВОДОМ МЕСТОПОЛОЖЕНИЯ БОЛИ | 2015 |
|
RU2690402C2 |
| СПОСОБ И УСТРОЙСТВО ВЗАИМОДЕЙСТВИЯ С ПОЛЬЗОВАТЕЛЕМ | 2006 |
|
RU2450319C2 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС С ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ | 2011 |
|
RU2596994C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ОДЕЖДЫ И СПОСОБ ИЗГОТОВЛЕНИЯ ДВЕРИ, УСТАНОВЛЕННОЙ НА УСТРОЙСТВЕ ДЛЯ ОБРАБОТКИ ОДЕЖДЫ | 2016 |
|
RU2690268C1 |
| УСТРОЙСТВО ЗЕРКАЛА С ЕМКОСТНЫМ СЕНСОРНЫМ ЭКРАНОМ И СПОСОБ ИЗГОТОВЛЕНИЯ | 2017 |
|
RU2731338C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ОДЕЖДЫ | 2016 |
|
RU2696416C1 |
| Сенсорная клавиатура на поверхностных акустических волнах | 2015 |
|
RU2607617C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ОДЕЖДЫ | 2016 |
|
RU2693866C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ОДЕЖДЫ | 2016 |
|
RU2685280C1 |
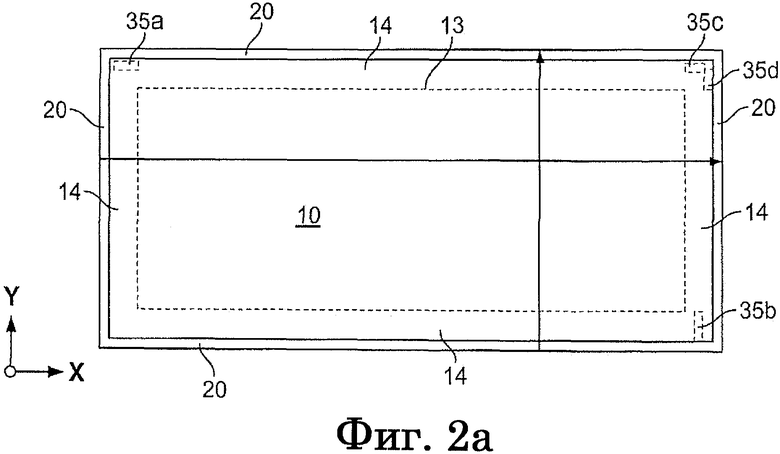
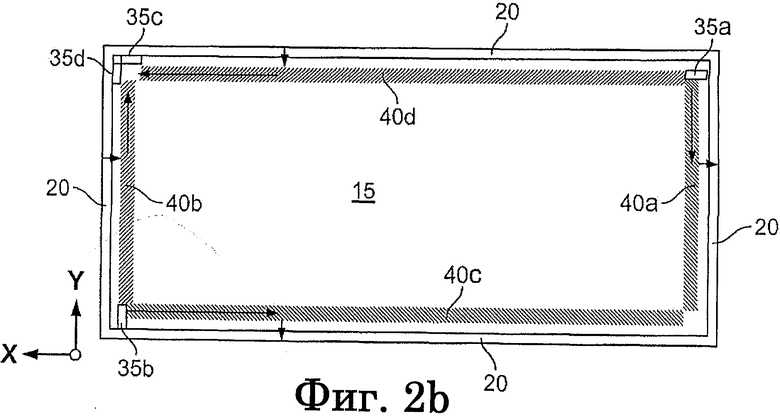
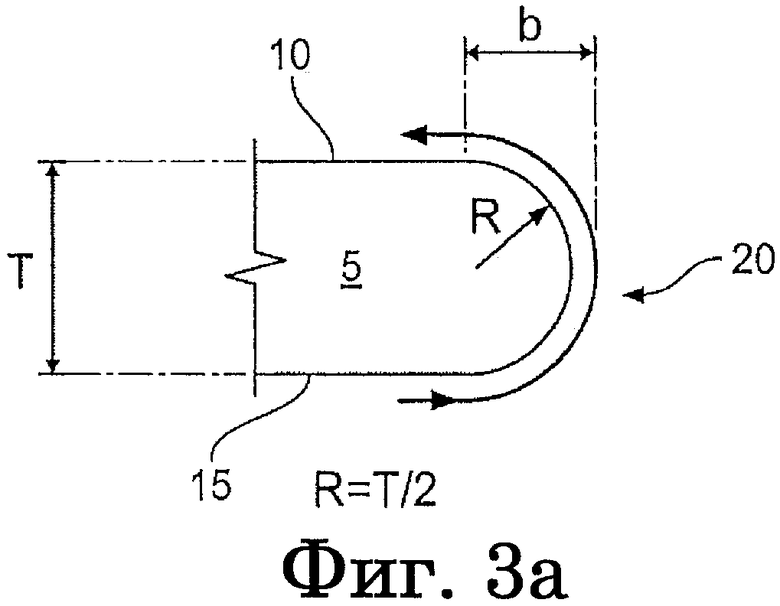
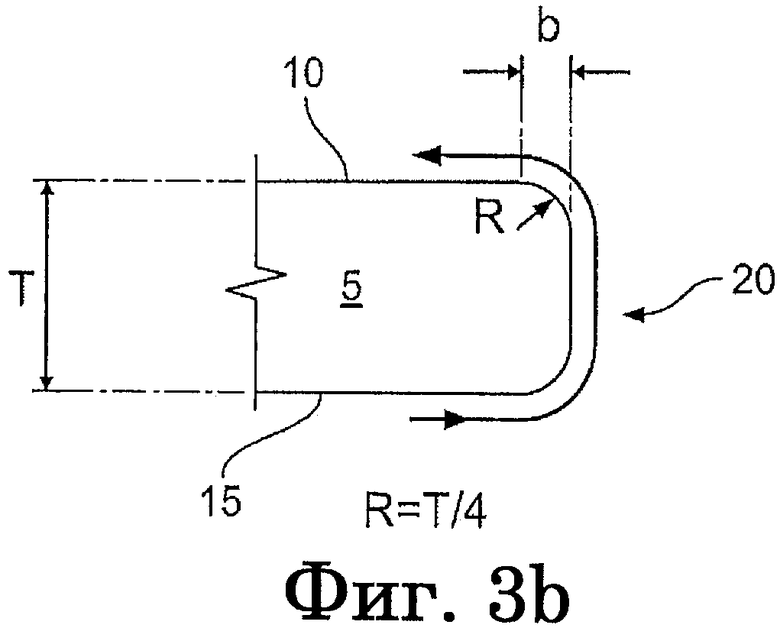
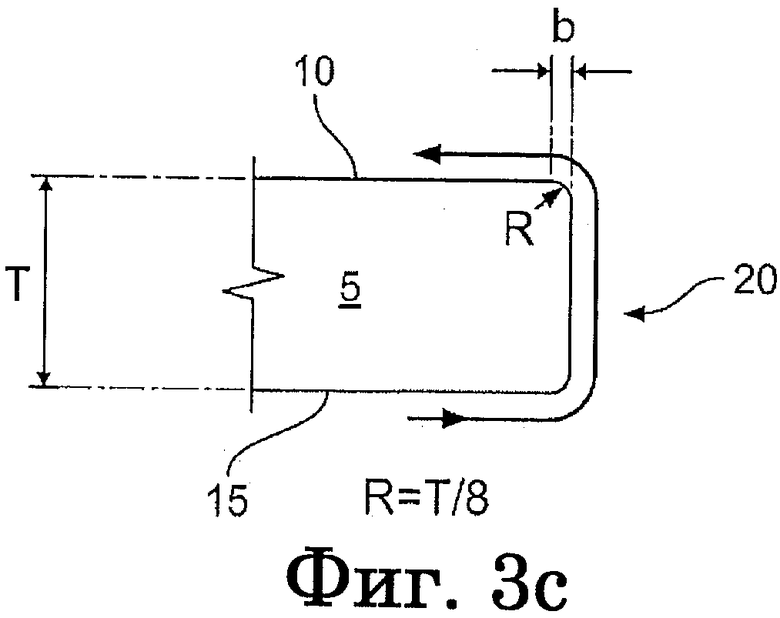
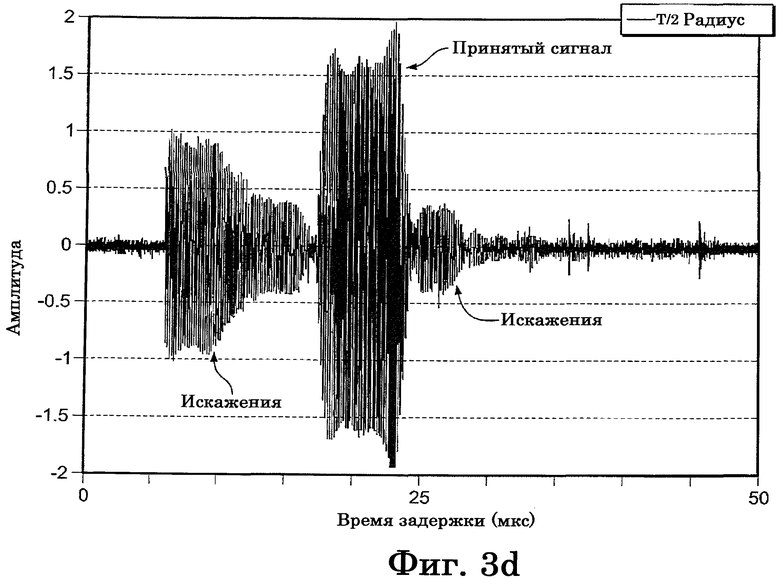
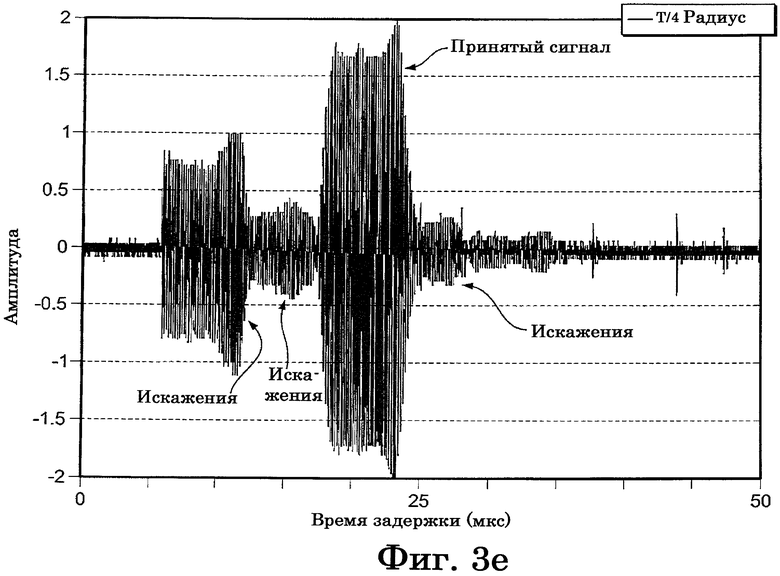
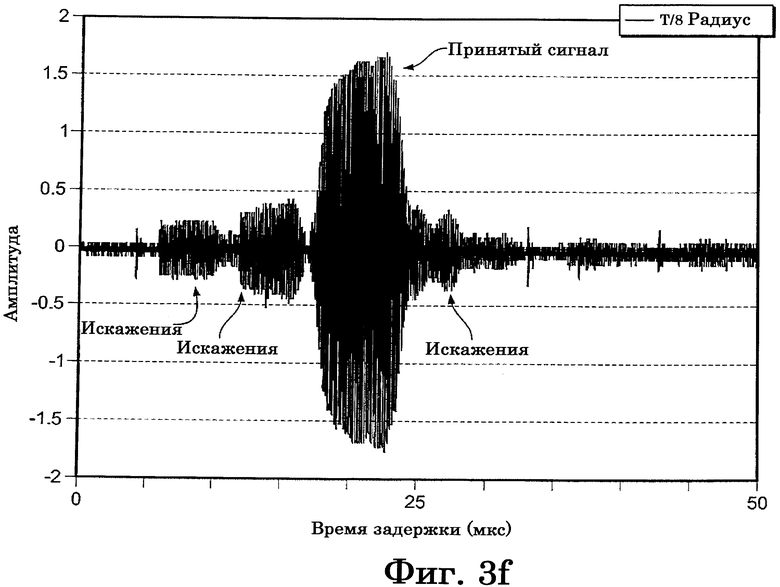
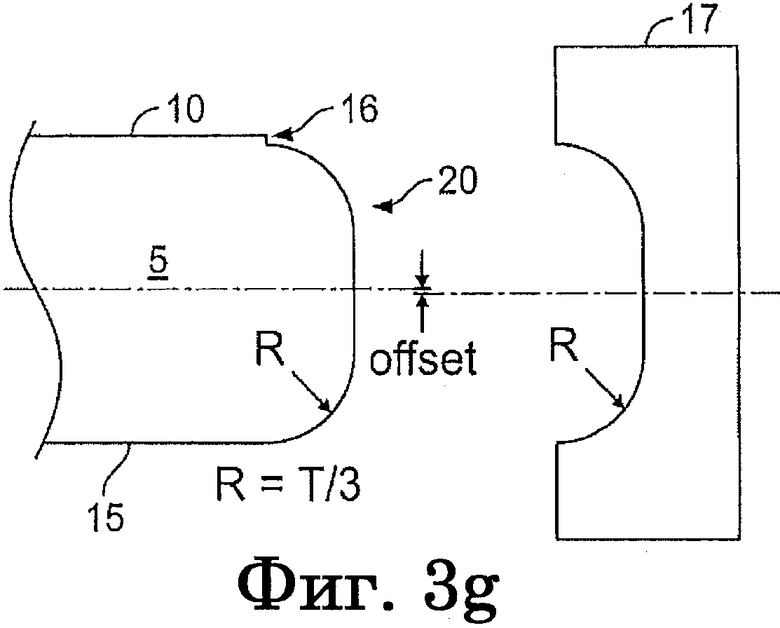
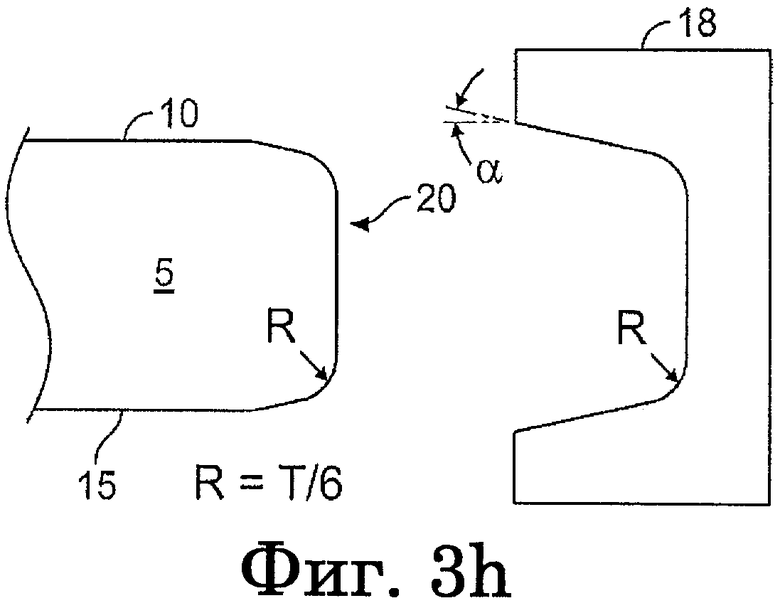
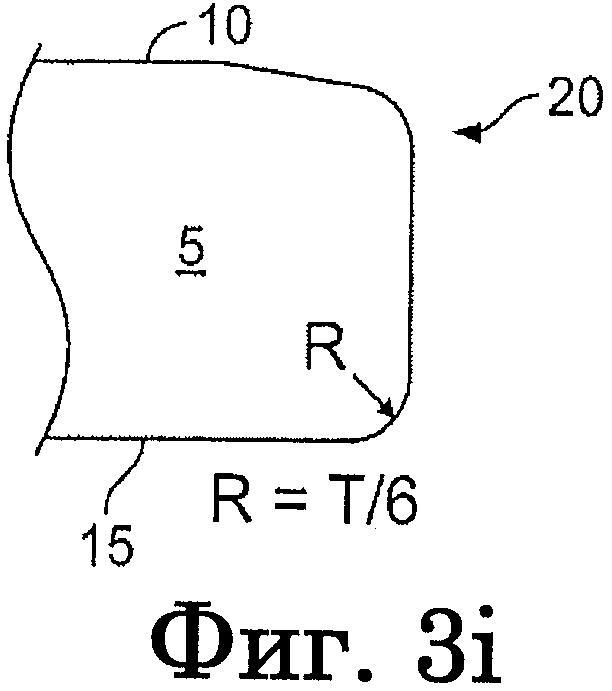
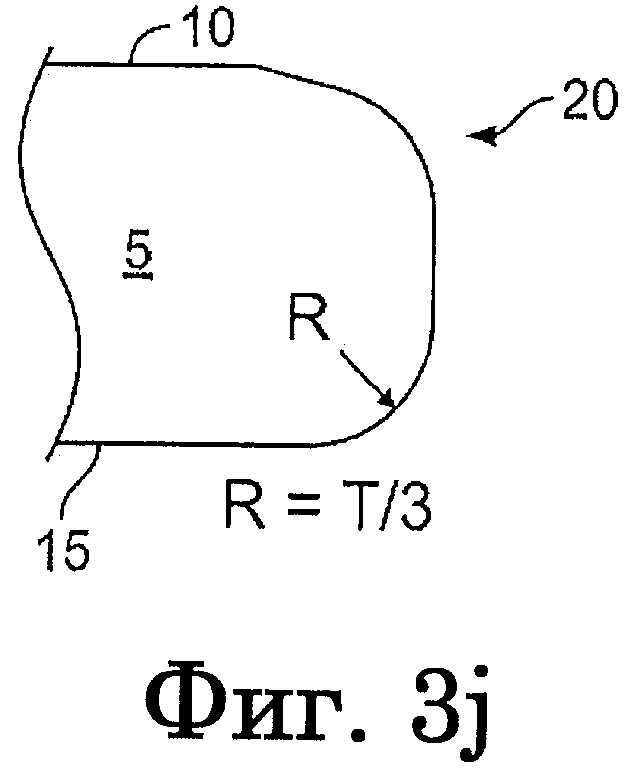
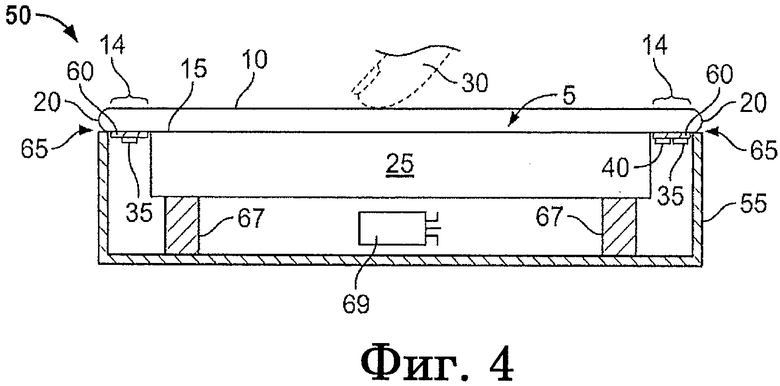
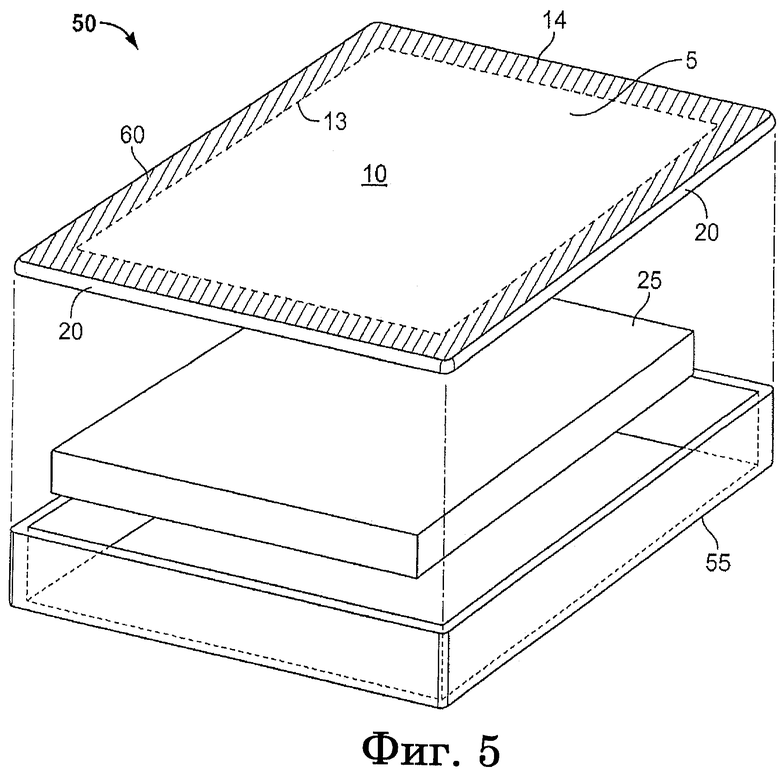
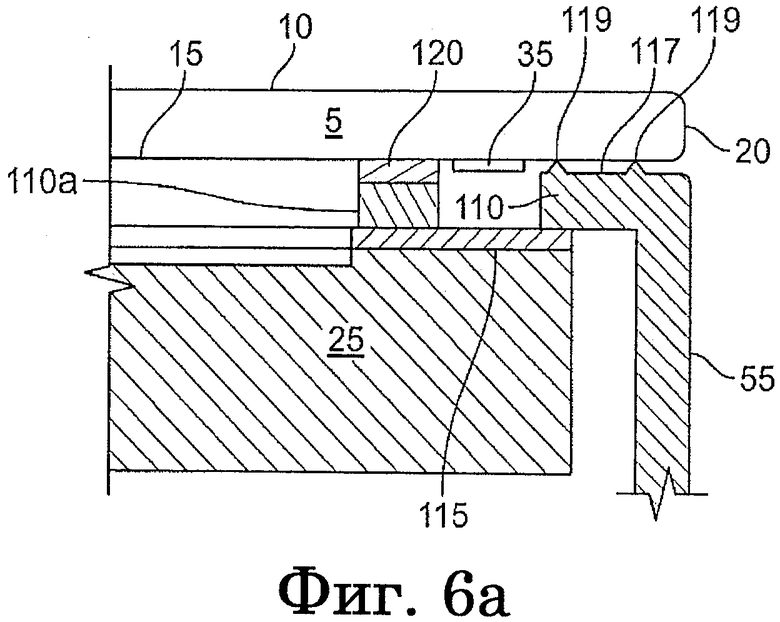
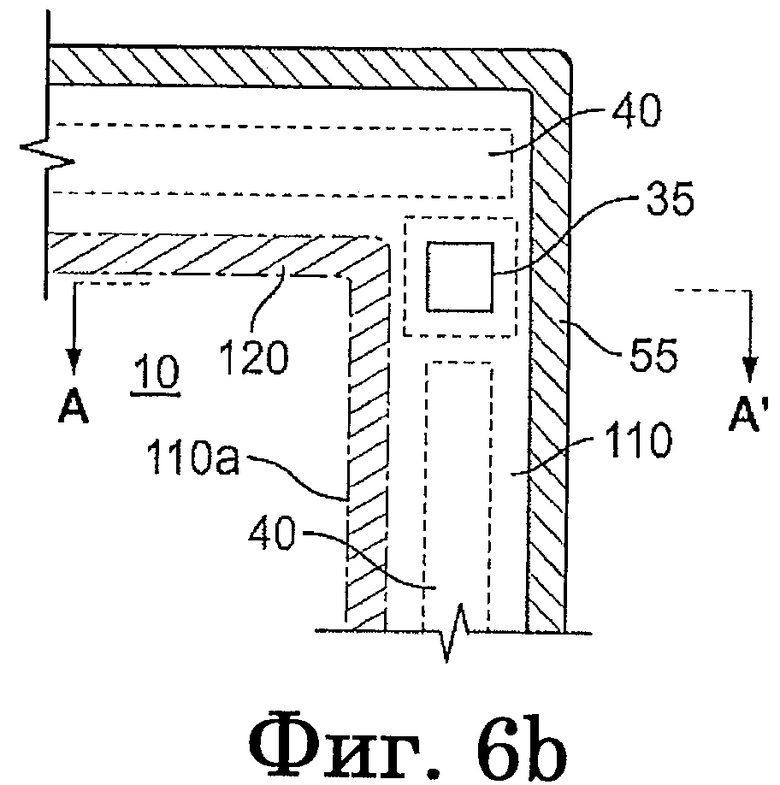
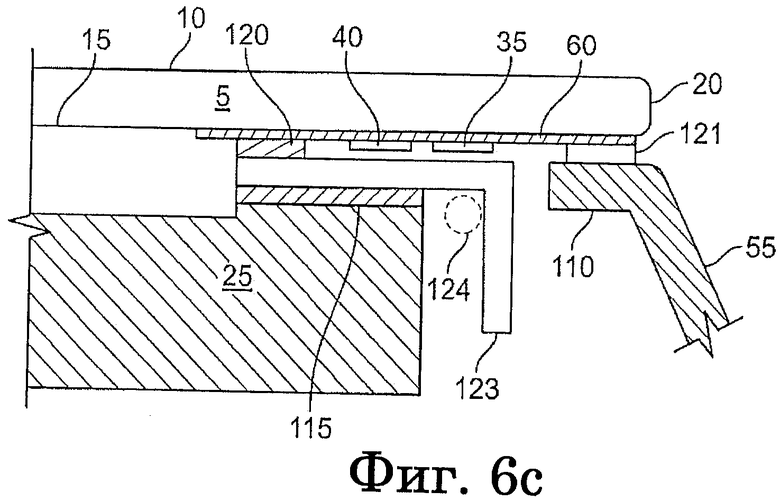
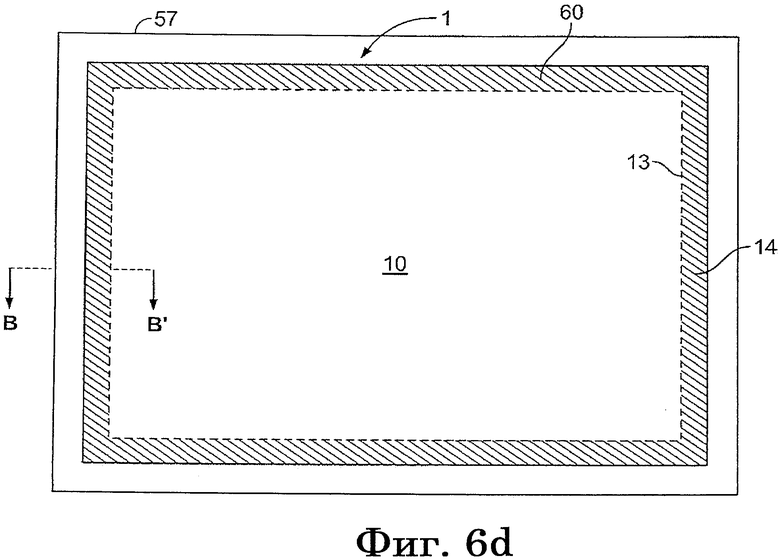
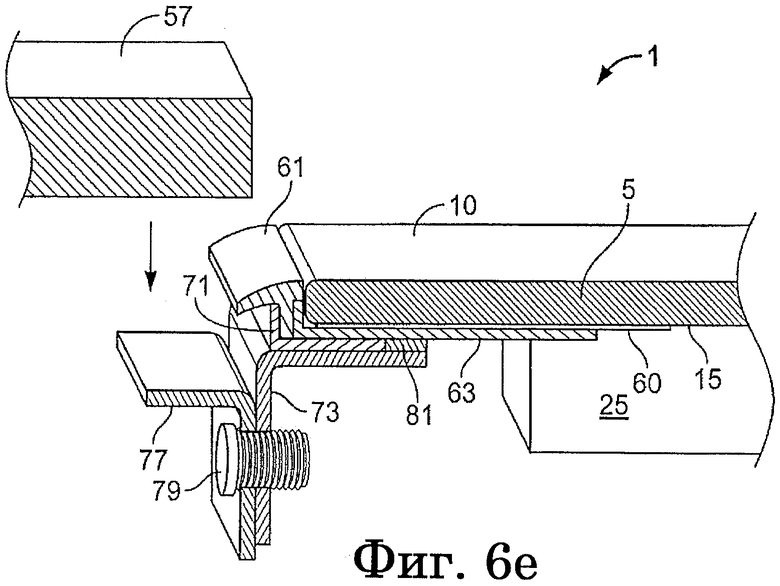
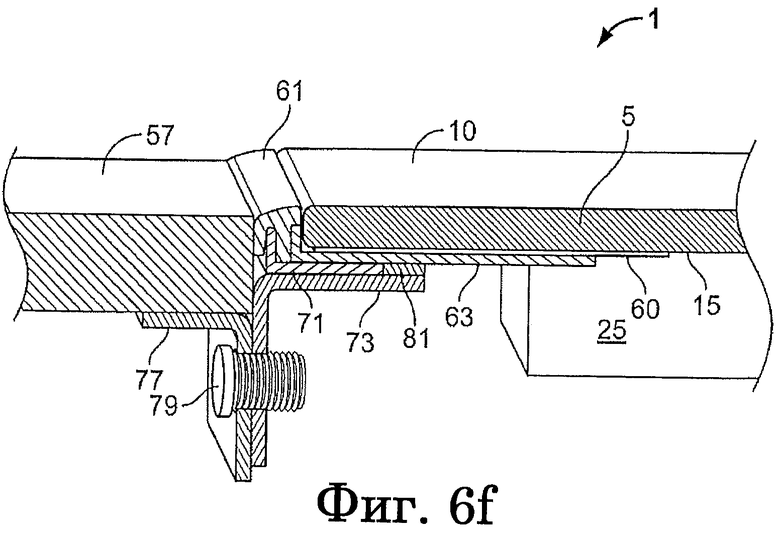
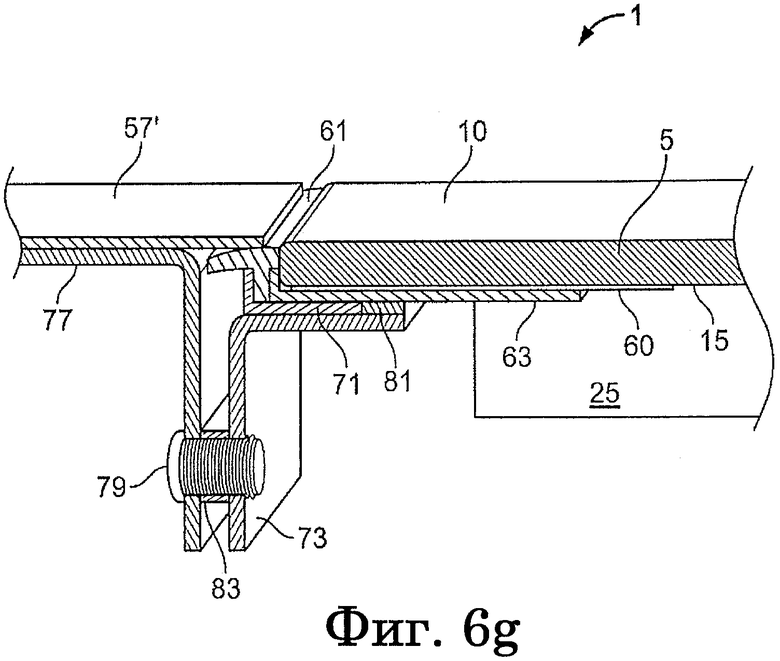

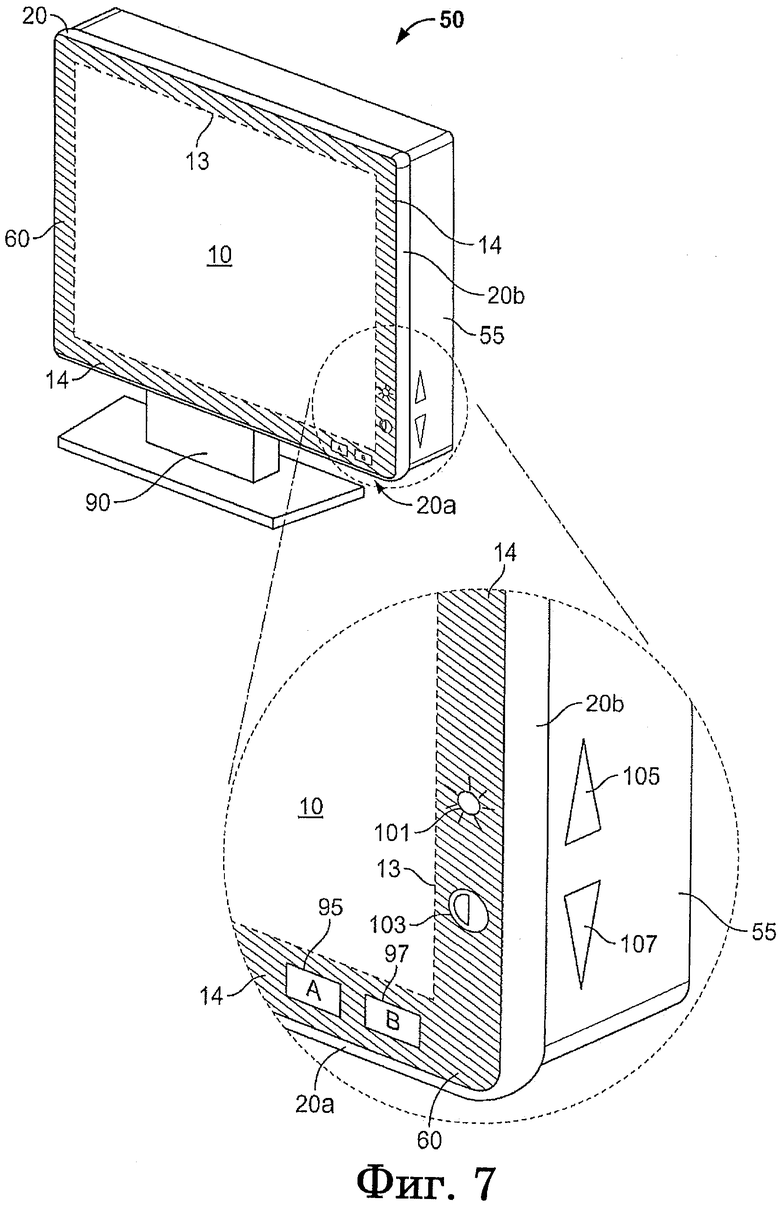
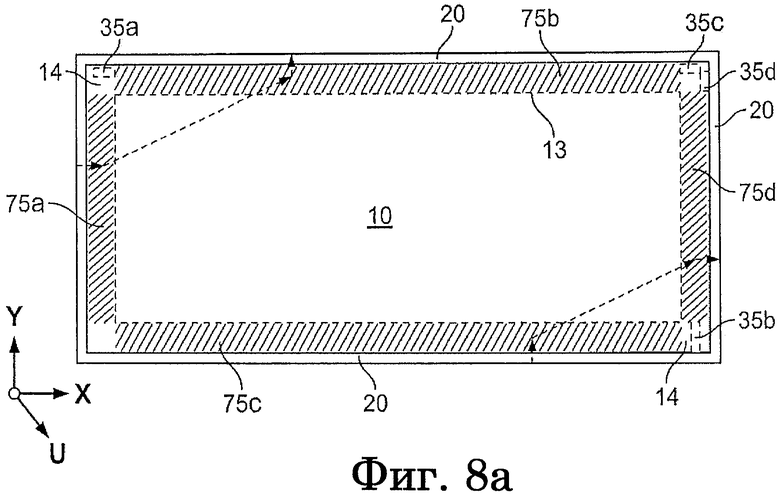
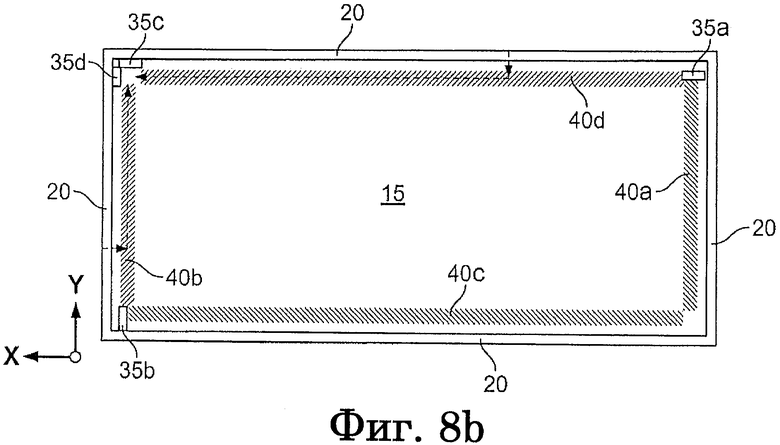
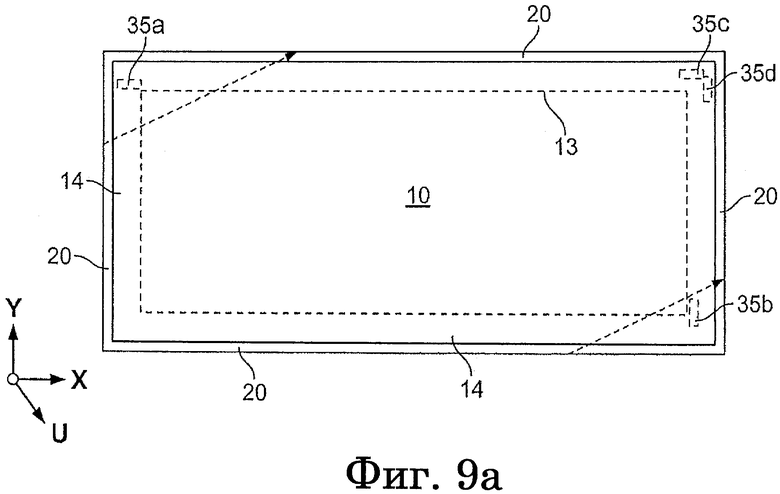
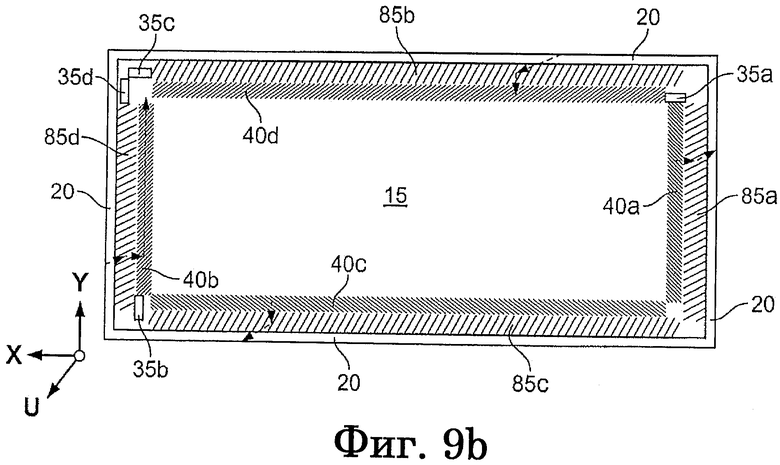
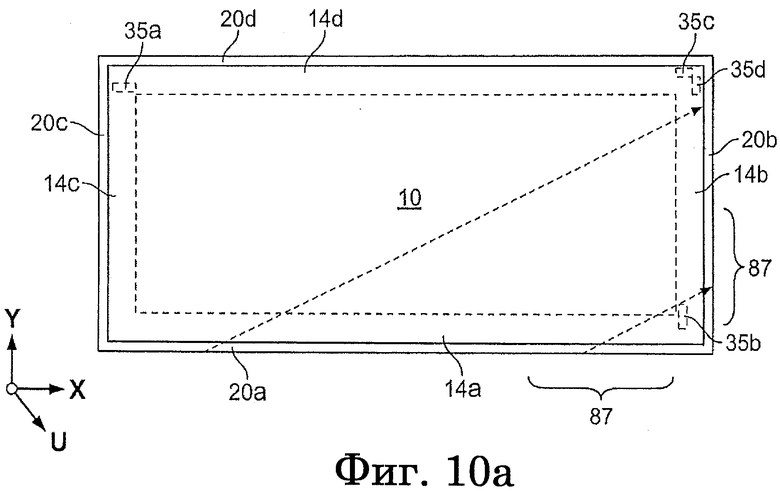
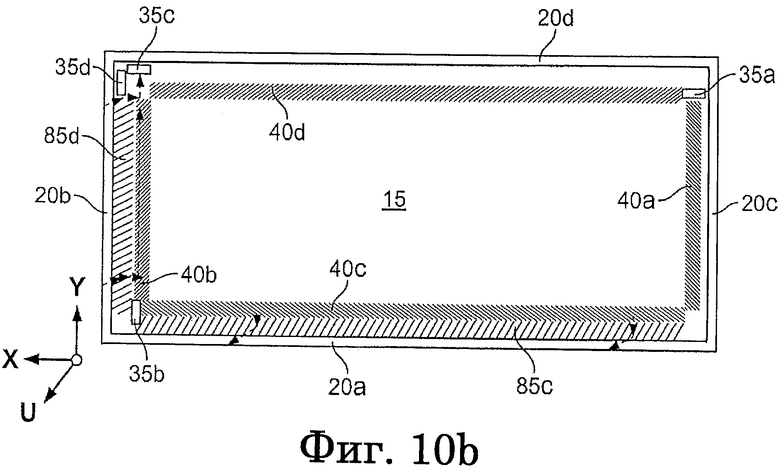
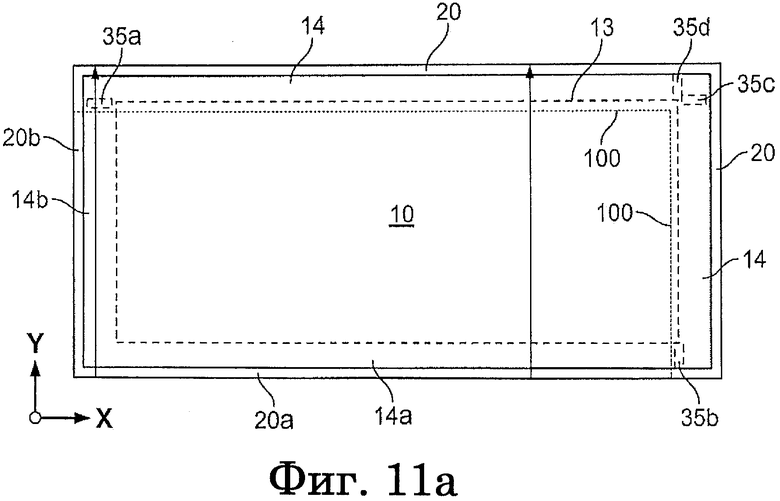
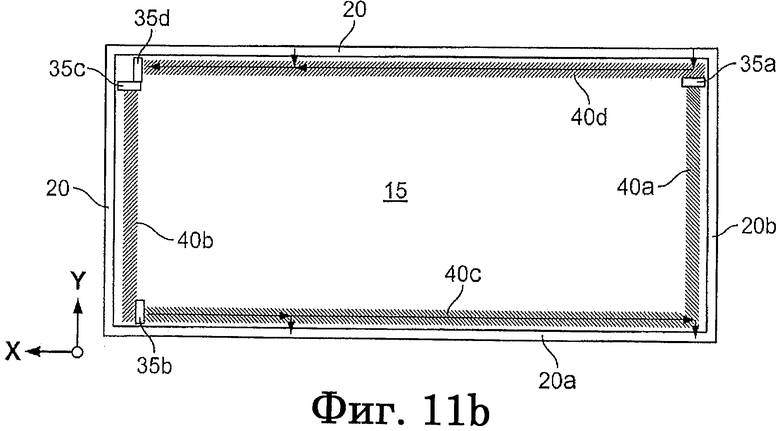

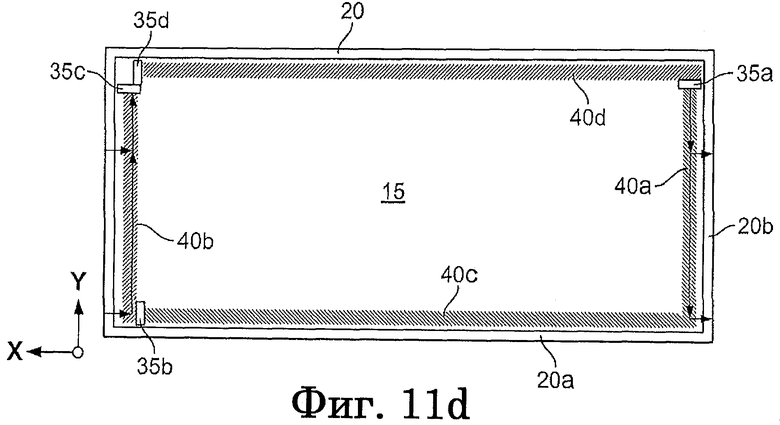
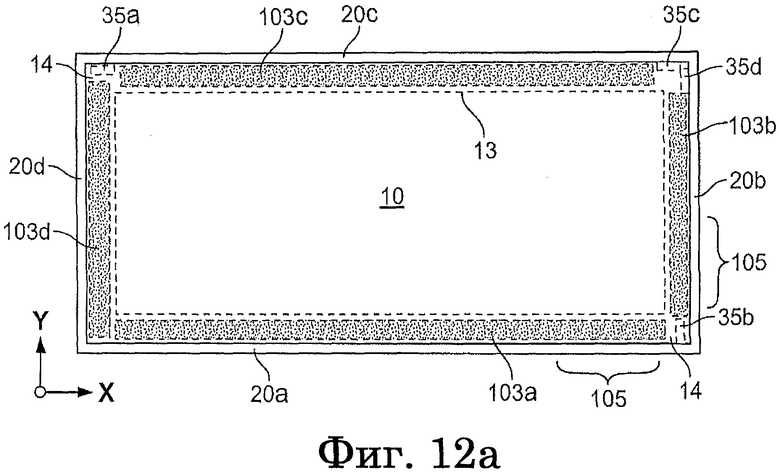
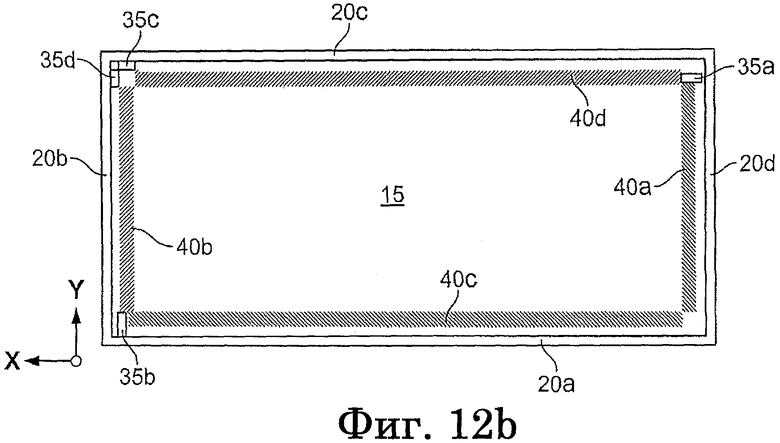
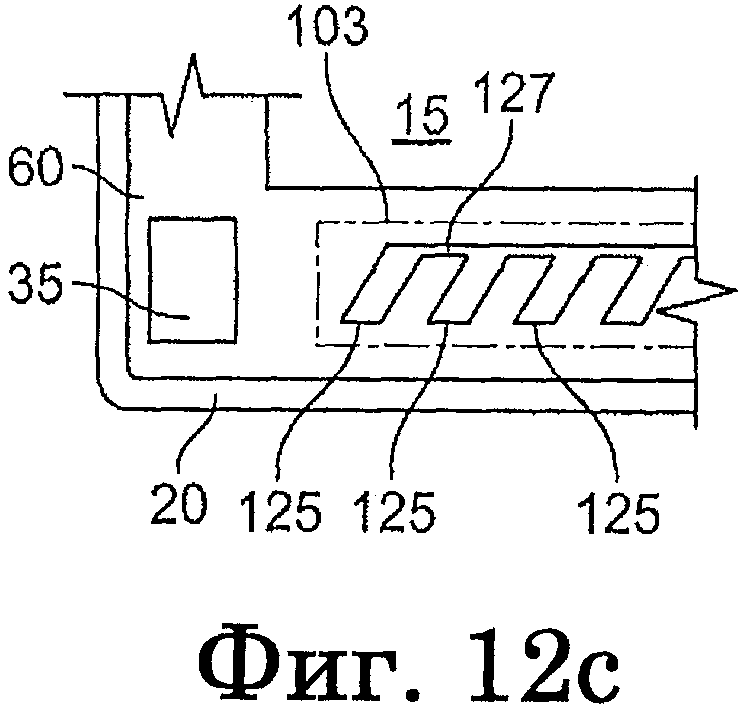
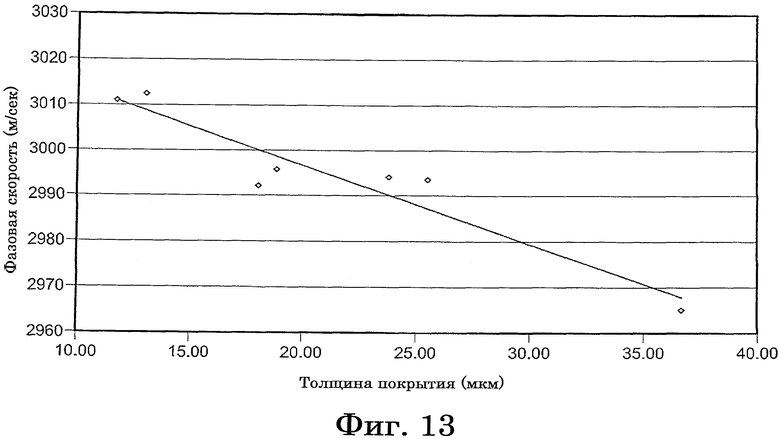
Изобретение относится к области систем с акустическими тактильными датчиками. Техническим результатом является выполнение акустического сенсорного устройства безрамочным, обладающим дополнительной тактильной функциональностью помимо той, что имеется в активной сенсорной области. Акустическое сенсорное устройство содержит подложку, способную распространять поверхностные акустические волны, содержащую переднюю, заднюю поверхности и изогнутую соединительную поверхность, образованную между передней и задней поверхностями; и по меньшей мере один преобразователь акустических волн и по меньшей мере одну отражающую структуру, причем преобразователь акустических волн и отражающая структура расположены за упомянутой задней поверхностью, при этом преобразователь акустических волн способен передавать поверхностные акустические волны на отражающую структуру или принимать поверхностные акустические волны от отражающей структуры, а отражающая структура способна рассеивать поверхностные акустические волны на указанной задней поверхности для распространения указанных рассеянных поверхностных акустических волн между упомянутой задней поверхностью и упомянутой передней поверхностью через упомянутую изогнутую соединительную поверхность. 3 н. и 27 з.п. ф-лы, 38 ил.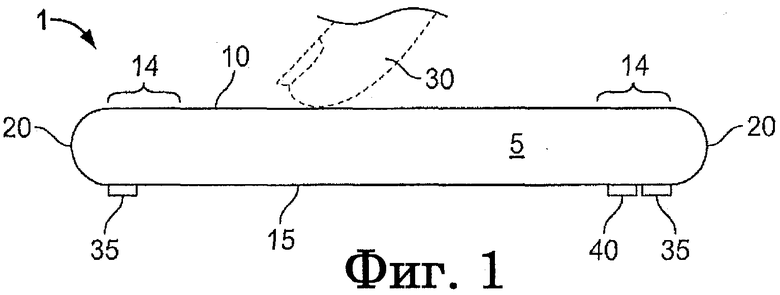
1. Акустическое сенсорное устройство, содержащее:
подложку, способную распространять поверхностные акустические волны, причем подложка содержит переднюю поверхность, заднюю поверхность и изогнутую соединительную поверхность, образованную между передней поверхностью и задней поверхностью; и
по меньшей мере один преобразователь акустических волн и по меньшей мере одну отражающую структуру, причем преобразователь акустических волн и отражающая структура расположены за упомянутой задней поверхностью, при этом преобразователь акустических волн способен передавать поверхностные акустические волны на отражающую структуру или принимать поверхностные акустические волны от отражающей структуры, а отражающая структура способна рассеивать поверхностные акустические волны на указанной задней поверхности для распространения указанных рассеянных поверхностных акустических волн между упомянутой задней поверхностью и упомянутой передней поверхностью через упомянутую изогнутую соединительную поверхность.
2. Устройство по п.1, в котором указанная передняя поверхность включает в себя номинальную область прикосновения и периферийную область, расположенную снаружи номинальной области прикосновения; причем устройство дополнительно содержит:
контроллер, выполненный с возможностью определять координату касания на номинальной области прикосновения, на периферийной области или на изогнутой соединительной поверхности на основании обнаруженных изменений формы волны указанных поверхностных акустических волн, причем контроллер электрически связан с преобразователем акустических волн;
дисплей, расположенный за указанной задней поверхностью;
при этом указанная периферийная область не закрыта рамкой.
3. Устройство по п.2, в котором контроллер после определения координаты касания на периферийной области или на изогнутой соединительной поверхности формирует данные координаты касания для периферийной области или изогнутой соединительной поверхности.
4. Устройство по п.3, в котором указанные данные координат касания обеспечивают включение в указанном устройстве функции касаний в краевой области.
5. Устройство по п.4, характеризующееся тем, что выполнено с возможностью обеспечения множества функций касаний в краевой области, соответствующих различным координатам на указанной периферийной области или указанной изогнутой соединительной поверхности.
6. Устройство по п.1, дополнительно содержащее по меньшей мере один делитель пучка.
7. Устройство по п.6, в котором делитель пучка расположен позади указанной задней поверхности.
8. Устройство по п.1, в котором подложка имеет толщину T, а изогнутая соединительная поверхность соединена с передней поверхностью и задней поверхностью посредством по меньшей мере одной изогнутой секции с радиусом R, находящимся в диапазоне от T/3 до T/6.
9. Устройство по п.1, в котором преобразователь акустических волн и отражающая структура связаны с указанной задней поверхностью посредством слоя на указанной задней поверхности, подходящего для распространения акустических волн.
10. Устройство по п.1, в котором слой, подходящий для распространения акустических волн, содержит неорганический материал.
11. Устройство по п.10, в котором слой, подходящий для распространения акустических волн, является непрозрачным или светопропускающим.
12. Устройство по п.3, в котором преобразователь акустических волн и отражающая структура связаны с задней поверхностью посредством слоя на указанной задней поверхности, подходящего для распространения акустических волн, при этом на упомянутом слое, подходящем для распространения акустических волн, имеется пиктограмма, обозначающая указанную функцию касаний в краевой области.
13. Устройство по п.7, в котором преобразователь акустических волн, отражающие структуры и делитель пучка связаны с указанной задней поверхностью посредством слоя на указанной задней поверхности, подходящего для распространения акустических волн
14. Устройство по п.3, в котором функция касаний в краевой области включает в себя действие по вводу данных, инициализируемое при обнаружении, что жест совершен.
15. Устройство по п.1, дополнительно содержащее:
по меньшей мере один проводящий электрод, расположенный рядом с периферийной областью или изогнутой соединительной поверхностью.
16. Устройство по п.15, в котором указанный по меньшей мере один проводящий электрод расположен за задней поверхностью.
17. Устройство по п.16, в котором указанный по меньшей мере один проводящий электрод содержит отражающие элементы указанной отражающей структуры и проводящий провод, связывающий указанные отражающие элементы, причем указанный по меньшей мере один проводящий электрод и указанные отражающие элементы образованы на задней поверхности посредством акустически благоприятного слоя, подходящего для распространения акустических волн.
18. Устройство по п.1, дополнительно содержащее вторую отражающую структуру, причем вторая отражающая структура и указанная по меньшей мере одна отражающая структура содержат общий отражающий элемент.
19. Устройство по п.2, в котором указанный дисплей установлен за указанной задней поверхностью внутри корпуса с помощью кронштейна, причем корпус не содержит указанной рамки.
20. Устройство по п.9, в котором подложка имеет толщину T, а по меньшей мере изогнутая соединительная поверхность связана между передней поверхностью и задней поверхностью, причем изогнутая соединительная поверхность имеет радиус R, равный примерно 2,7λ, где λ - длина рэлеевской волны.
21. Устройство по п.1, в котором изогнутая соединительная поверхность связана между передней поверхностью и задней поверхностью с помощью по меньшей мере одного плоского участка.
22. Устройство по п.21, в котором указанный по меньшей мере один плоский участок образует угол менее 8 градусов с передней поверхностью или задней поверхностью.
23. Устройство по п.1, в котором изогнутая соединительная поверхность содержит два изогнутых участка, связанных по меньшей мере с одним плоским участком, расположенным между указанными двумя изогнутыми участками.
24. Устройство по п.19, в котором указанный корпус связан с задней поверхностью подложки с помощью прокладки, имеющей сечение щетки стеклоочистителя.
25. Устройство по п.2, дополнительно содержащее первый кронштейн, пружинящий кронштейн и прокладку с сечением щетки стеклоочистителя, минимальная часть которой соприкасается с указанной подложкой, при этом первый кронштейн связан между указанной задней поверхностью и первой стороной прокладки, пружинящий кронштейн связан со второй стороной прокладки и нижней поверхностью первого кронштейна таким образом, что прокладка обеспечивает герметичное уплотнение между подложкой и рамкой, расположенной вокруг подложки.
26. Устройство по п.25, в котором дисплей установлен за указанной задней поверхностью при помощи третьего кронштейна, соединенного с четвертым кронштейном, при этом третий кронштейн соединен с указанной рамкой, четвертый кронштейн прикреплен к пружинящему кронштейну и первому кронштейну.
27. Устройство по п.26, в котором часть прокладки находится над внешней границей указанной рамки.
28. Акустическое сенсорное устройство, содержащее:
подложку, способную распространять поверхностные акустические волны, причем подложка содержит переднюю поверхность, заднюю поверхность и изогнутую соединительную поверхность, образованную между передней поверхностью и задней поверхностью; причем указанная передняя поверхность включает в себя номинальную область прикосновения и периферийную область, расположенную снаружи номинальной области прикосновения, при этом периферийная область не закрыта рамкой;
по меньшей мере один преобразователь акустических волн и по меньшей мере одну отражающую структуру, причем преобразователь акустических волн и отражающая структура связаны с задней поверхностью посредством слоя, находящегося на задней поверхности, подходящего для распространения акустических волн, при этом преобразователь акустических волн способен передавать поверхностные акустические волны на отражающую структуру или принимать поверхностные акустические волны от отражающей структуры, а отражающая структура способна рассеивать поверхностные акустические волны на указанной задней поверхности для распространения указанных рассеянных поверхностных акустических волн между задней поверхностью и передней поверхностью посредством указанной изогнутой соединительной поверхности;
контроллер, выполненный с возможностью определять координату касания на номинальной области прикосновения, на периферийной области или на изогнутой соединительной поверхности на основании обнаруженных изменений формы волны указанных поверхностных акустических волн, причем контроллер электрически связан с преобразователем акустических волн; и
дисплей, расположенный за указанной задней поверхностью.
29. Устройство по п.28, в котором между указанной задней поверхностью и дисплеем расположен слой, оптически прозрачный и ослабляющий акустические волны.
30. Акустическое сенсорное устройство, содержащее:
подложку, способную распространять поверхностные акустические волны, причем подложка содержит переднюю поверхность, заднюю поверхность и изогнутую соединительную поверхность, образованную между передней поверхностью и задней поверхностью; причем указанная передняя поверхность включает в себя номинальную область прикосновения и периферийную область, расположенную снаружи номинальной области прикосновения, при этом периферийная область не закрыта рамкой;
по меньшей мере один преобразователь акустических волн и по меньшей мере одну отражающую структуру, причем преобразователь акустических волн и отражающая структура связаны с указанной задней поверхностью посредством слоя на указанной задней поверхности, подходящего для распространения акустических волн, при этом преобразователь акустических волн способен передавать поверхностные акустические волны на отражающую структуру или принимать поверхностные акустические волны от отражающей структуры, а отражающая структура способна рассеивать поверхностные акустические волны на указанной задней поверхности для распространения указанных рассеянных поверхностных акустических волн между указанной задней поверхностью и указанной передней поверхностью через изогнутую соединительную поверхность;
контроллер, выполненный с возможностью определять координату касания на указанной области прикосновения, на периферийной области или на изогнутой соединительной поверхности на основании обнаруженных изменений формы волны поверхностных акустических волн, причем контроллер электрически связан с преобразователем акустических волн, при этом контроллер после определения координаты касания на периферийной области или на изогнутой соединительной поверхности формирует данные координаты касания для периферийной области или изогнутой соединительной поверхности.
| Электрофотографический материал | 1983 |
|
SU1107102A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| RU 2006116510 A, 27.11.2007 | |||
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ КАСАНИЯ ОПТОЭЛЕКТРОННОГО СЕНСОРНОГО ЭКРАНА С ПОВЫШЕННЫМ РАЗРЕШЕНИЕМ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2007 |
|
RU2353002C2 |

