ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к оценке положений громкоговорителей, и в частности, но не исключительно, к оценке положений громкоговорителей в потребительских системах объемного звука.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Акустические системы становятся все более и более продвинутыми, сложными и разнообразными. Например, становятся распространенными многоканальные пространственные звуковые системы, например пяти- или семиканальные системы домашнего кинотеатра. Однако качество звука, и в частности пространственное впечатление пользователя, в таких системах зависит от соотношения между положением прослушивания и положениями громкоговорителей. Во многих системах звуковоспроизведение основывается на предполагаемом относительном месте динамика, и системы обычно проектируются для обеспечения высококачественного пространственного впечатления в относительно небольшой области, известной как зона наилучшего восприятия. Таким образом, системы обычно предполагают, что динамики располагаются так, что они обеспечивают зону наилучшего восприятия в конкретном номинальном положении прослушивания.
Однако настройка идеального положения динамика часто не повторяется на практике из-за ограничений практических условий применения. В действительности, поскольку громкоговорители часто считаются необходимой, а не желательной конструктивной особенностью, пользователи (например, частные покупатели) обычно предпочитает большую гибкость при выборе числа и положений громкоговорителей. Например, в типичной жилой комнате часто невозможно или нежелательно (например, по эстетическим причинам) разместить большое количество громкоговорителей в положениях, которые дадут оптимальную характеристику.
Некоторые звуковые системы разработаны включающими в себя функциональные возможности для ручной калибровки и компенсации изменяющихся положений динамиков. Например, многие системы домашнего кинотеатра включают в себя средство для ручной настройки задержки и относительного уровня сигнала для каждого канала (например, путем ручного указания расстояния до громкоговорителей). Однако такая ручная настройка отдельных параметров обычно бывает довольно обременительной и непрактичной для типичного пользователя. Кроме того, она имеет склонность не обеспечивать оптимальную характеристику, так как параметры, которые можно установить, относительно ограничены (хотя по-прежнему сбивают с толку многих неспециалистов).
Также предложено выполнять полуавтоматический процесс на основе микрофона, помещаемого в положение прослушивания во время процесса калибровки. Звуковая система тогда может оптимизировать различные характеристики траектории сигнала для каждого канала, чтобы предоставить оптимизированный звук в положении микрофона. Однако, хотя такой процесс может повысить качество звучания, он обеспечивает относительно ограниченную гибкость, так как оптимизация основывается только на информации, предоставленной микрофоном, и по существу ограничивается одним положением прослушивания и адаптацией параметров, которые влияют на звук, записанный микрофоном. Например, он не предоставляет никакой прямой пространственной информации, которая может использоваться для оптимизации системы.
Некоторые звуковые системы содержат функциональные возможности для оптимизации обработки звукового сигнала на основе фактических положений динамиков относительно положения или области прослушивания. Например, предложены системы, которые автоматически оптимизируют обработку сигналов, чтобы предоставить потребителю оптимизированное пространственное звуковоспроизведение для любой конфигурации громкоговорителей.
Однако, чтобы оптимизировать звуковоспроизведение в таких гибких системах, необходимо, чтобы определялись положения громкоговорителей, и предпочтительно также положение прослушивания и ориентация пользователя.
Предложено, что положения динамиков могут определяться автоматически на основе акустического измерения выходных сигналов громкоговорителей. В частности, предложено, что относительные положения громкоговорителей могут определяться путем совмещения микрофона с каждым громкоговорителем, и при этом каждый громкоговоритель по очереди воспроизводит калибровочный сигнал, который регистрируется микрофонами других громкоговорителей. Путем определения из зарегистрированных сигналов разных задержек распространения от каждого отдельного громкоговорителя ко всем остальным громкоговорителям можно произвести оценку геометрического расположения настройки динамиков.
Однако такой подход обладает некоторыми связанными недостатками. Например, он требует дополнительных аппаратных средств (микрофон) для каждого громкоговорителя, посредством этого увеличивая стоимость и ограничивая использование системами, в которых такие микрофоны предоставляются вместе с динамиками. Кроме того, он требует взаимодействия между центральным блоком и каждым из громкоговорителей, посредством этого дополнительно увеличивая сложность и стоимость. К тому же чувствительность к акустическим помехам в помещении относительно высокая. Например, источники звука, отличные от громкоговорителей, или объекты, блокирующие прямую траекторию от громкоговорителя к микрофонам, могут значительно ухудшать этот подход. Кроме того, способ требует воспроизведения калибровочного сигнала, что означает, что процесс калибровки является заметным и, возможно, раздражающим для пользователя. Также, чтобы определить положение прослушивания, необходимо расположить дополнительный микрофон в положении прослушивания.
Другой подход, который предложен, является способами локализации на основе РЧ (радиочастота), например RFID (радиочастотная идентификация) и Сверхширокополосная связь (UWB). Эти способы используют метки, которые прикрепляются к объектам, местонахождение которых нужно определить. Метки излучают маломощный РЧ-сигнал, который обнаруживается несколькими (>=3) РЧ-датчиками, после чего относительное местоположение определяется путем триангуляции. Однако такой подход также обладает некоторыми связанными недостатками. В частности, требуется пометить каждый объект, который нужно найти, необходимо несколько датчиков, и их нужно пространственно рассредоточить по помещению, и внутренняя точность часто относительно низкая и недостаточная для адаптации звуковых систем к конфигурациям динамиков. Кроме того, подход относительно дорогой, поскольку стоимость ассоциированной технологии является относительно высокой.
Кроме того, общая проблема для большинства предложенных в настоящее время подходов состоит в том, что их не просто расширить от определения положения динамика до определения положения слушателя. Например, неудобно помещать датчик RFID в месте прослушивания.
Поэтому была бы полезной улучшенная система для оценки положений динамиков, и, в частности, была бы полезной система, допускающая повышенную гибкость, улучшенное качество звучания, уменьшенную стоимость, упрощенную работу, упрощенную реализацию, улучшенное взаимодействие с пользователем, улучшенное пространственное восприятие и/или улучшенную производительность.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Соответственно, изобретение стремится предпочтительно смягчить, ослабить или устранить один или несколько вышеупомянутых недостатков, поодиночке или в любом сочетании.
В соответствии с особенностью изобретения предоставляется система для определения оценок положений громкоговорителей, содержащая: средство для определения данных движения для пользовательского переносного блока, причем данные движения описывают перемещение пользовательского переносного блока, и пользовательское устройство ввода для приема пользовательских активизаций, причем пользовательская активизация указывает, что текущая ориентация пользовательского переносного блока ассоциируется с положением громкоговорителя, когда принимается пользовательская активизация; и анализирующее средство для определения данных ориентации, указывающих ориентацию пользовательского переносного блока, в ответ на данные движения, и для формирования оценок положений громкоговорителей в ответ на данные движения и пользовательские активизации.
Изобретение может позволить эффективную оценку положений динамиков. В частности, относительно высокая точность может достигаться при сохранении очень низкой сложности и/или удобного для пользователя подхода. Подход может использоваться во многих разных сценариях и применим ко многим разным настройкам динамиков и аудиосредам.
Подход может особенно подходить для потребительского сегмента, так как он дает возможность надежного определения положения динамика на основе простых операций и процедуры измерения, которую легко выполнить неспециалисту.
Изобретение может предоставить недорогой подход и, в частности, избегает необходимости отдельного измерительного оборудования, совмещенного или встроенного во все отдельные громкоговорители. Конечно, подход может быть полностью независимым от любого конкретного используемого динамика. Конечно, положения динамиков можно оценить вообще без каких-либо установленных динамиков, и подход может использоваться, например, для предварительной калибровки системы перед фактической установкой динамиков.
Также система не требует никакого коммуникационного обмена между любыми громкоговорителями и функциональными возможностями оценки. На самом деле во многих вариантах осуществления любая передача данных, ассоциированных с оценкой положений динамиков, ограничивается передачей данных от пользовательского переносного блока.
Подход во многих сценариях может обеспечить улучшенную прямую оценку относительных положений динамиков для заданного положения прослушивания и не полагается на более сложные, неточные или подверженные ошибкам непрямые алгоритмы оценки, например алгоритмы триангуляции или оценки по методу наименьших квадратов. Кроме того, подход не требует никакой прямой линии визирования и может быть невосприимчивым к помехам, например радиопомехам или звуковым помехам.
Также можно добиться недорогих реализаций, и, в частности, подход может позволить, чтобы оценки положений динамиков основывались на данных от недорогой технологии с датчиком движения, например недорогих датчиков движения MEMS (микроэлектромеханическая система).
Ориентация переносного блока может включать в себя любое указание относительного или абсолютного направления переносного блока и/или любое указание вращения переносного блока вокруг любой физической или аналитической оси. Положение и ориентация пользовательского переносного блока может включать в себя любое указание относительного или абсолютного положения, направления, вращения, угла или ориентации пользовательского переносного блока.
Данные движения могут формироваться, например, одним или несколькими датчиками движения в пользовательском переносном блоке. В некоторых вариантах осуществления средство для определения данных движения может содержаться в пользовательском переносном блоке. В некоторых вариантах осуществления пользовательское устройство ввода может содержаться в пользовательском переносном блоке. В некоторых вариантах осуществления анализирующее средство может частично или полностью содержаться в пользовательском переносном блоке.
Оценки положений громкоговорителей могут использоваться для изменения характеристики воспроизведения или представления звука из положений громкоговорителей. Например, положения громкоговорителей могут ассоциироваться с громкоговорителями в системе многоканального пространственного звука, например системе объемного звука. Оценки положений громкоговорителей могут соответствовать громкоговорителям пространственных каналов, представляющим сигналы отдельных каналов многоканального сигнала. Система может включать в себя средство для изменения характеристики представления многоканального сигнала из громкоговорителей, ассоциированной с предполагаемыми положениями громкоговорителей, в ответ на предполагаемые положения громкоговорителей. Использование точных оценок положений громкоговорителей предоставляет весьма увеличенную гибкость и поле для оптимизации представления многоканального сигнала.
Анализирующее средство выполнено с возможностью определения данных ориентации, указывающих ориентацию пользовательского переносного блока, в ответ на данные движения.
Это может предоставить улучшенную оценку и/или упрощенную работу во многих сценариях. Ориентация может включать в себя угол, направление и/или вращение пользовательского переносного блока.
В соответствии с необязательным признаком изобретения анализирующее средство выполнено с возможностью оценки направления из некоторого положения к громкоговорителю для каждой из множества пользовательских активизаций в ответ на данные ориентации для пользовательских активизаций; и определения оценок положений громкоговорителей в ответ на эти направления.
Это может предоставить улучшенную оценку и/или упрощенную работу во многих сценариях. В частности, направление может быть представлено углом относительно опорного направления. Опорное направление может соответствовать направлению к центральной точке симметрии для настройки динамика и/или заранее установленному пространственному углу восприятия звука, например углу непосредственно перед слушателем.
Положение может быть любым положением в трехмерном, двумерном или даже одномерном пространстве. Положение во многих применениях может быть положением прослушивания. Положение может быть положением, соответствующим положению пользовательского переносного блока при приеме одной или нескольких пользовательских активизаций, или может определяться, например, из этих положений (например, как среднее).
В соответствии с необязательным признаком изобретения анализирующее средство выполнено с возможностью определения оценок положений громкоговорителей в ответ на заранее установленную оценку расстояния от этого положения до каждого положения громкоговорителя.
Это может обеспечить упрощенный процесс оценки положений громкоговорителей наряду с предоставлением результатов, которые достаточно точны для многих сценариев, применений и настроек динамиков.
Заранее установленное расстояние может быть одинаковым для всех громкоговорителей или может быть разным для разных динамиков. Заранее установленное расстояние может быть фиксированным расстоянием, например заданным на этапе проектирования, или вводиться пользователем вручную. Таким образом, заранее установленное расстояние может быть любым неизмеренным расстоянием.
В соответствии с необязательным признаком изобретения анализирующее средство выполнено с возможностью определения данных положения, указывающих положение переносного блока, в ответ на данные движения.
Это может предоставить улучшенную оценку и/или упрощенную работу во многих сценариях. Ориентация может включать в себя угол, направление и/или вращение пользовательского переносного блока. Данные положения могут формироваться, например, из данных перемещения. Например, данные об ускорении можно проинтегрировать дважды, чтобы предоставить данные положения. Можно определить положения пользовательского переносного блока, ассоциированные с пользовательскими активизациями. Положения могут определяться как абсолютные или относительные положения, например относительно положения прослушивания.
В соответствии с необязательным признаком изобретения, анализирующее средство выполнено с возможностью оценки относительного положения пользовательского переносного блока для каждой из множества пользовательских активизаций в ответ на данные положения, ассоциированные с пользовательскими активизациями; и определения оценок положений громкоговорителей в ответ на относительные положения.
Это может обеспечить несложный процесс оценки наряду с предоставлением оценок, которые очень подходят для оптимизации представленного звука.
В соответствии с необязательным признаком изобретения оценки положений громкоговорителей определяются при допущении, что каждое относительное положение соответствует положению громкоговорителя.
Это может предоставить улучшенную оценку и/или упрощенную работу во многих сценариях. В частности, это может позволить улучшенную оптимизацию представленного звука из громкоговорителей, расположенных в предполагаемых положениях.
В соответствии с необязательным признаком изобретения пользовательское устройство ввода выполнено с возможностью приема опорной пользовательской активизации, указывающей, что текущее положение или ориентация пользовательского переносного блока ассоциируется с исходной точкой положения прослушивания, а анализирующее средство выполнено с возможностью определения исходного положения или ориентации в ответ на опорную пользовательскую активизацию и определения оценок положений динамиков в ответ на исходное положение или ориентацию.
Это может позволить улучшенную оптимизацию воспроизведения звука из предполагаемых положений динамиков и может, в частности, позволить оптимизацию для определенного и выбираемого/задаваемого пользователем положения прослушивания.
В соответствии с необязательным признаком изобретения анализирующее средство выполнено с возможностью определения оценок положений динамиков относительно положения прослушивания.
Это может упростить и/или улучшить оценку и/или оптимизацию воспроизведения звука из предполагаемых положений динамиков.
В соответствии с необязательным признаком изобретения пользовательское устройство ввода выполнено с возможностью приема пользовательского ввода, указывающего, что положение громкоговорителя не используется; и анализирующее средство выполнено с возможностью обозначения соответствующего положения динамика как неиспользуемого.
Это может обеспечить высокую гибкость и/или улучшенную адаптацию, обеспечивая при этом простой и удобный для пользователя процесс калибровки. В частности, воспроизведение звука может быть приспособлено к точному числу и предполагаемым положениям используемых громкоговорителей.
В соответствии с необязательным признаком изобретения пользовательский переносной блок является карманным (наладонным) устройством.
Это может предоставить очень гибкий и удобный для пользователя подход и может быть особенно выгодным в потребительском сегменте. Карманное устройство может быть, в частности, пультом дистанционного управления. Пульт дистанционного управления может быть пультом дистанционного управления, допускающим управление пользовательским устройством. В частности, пульт дистанционного управления может быть пультом дистанционного управления для управляющего блока громкоговорителя (например, усилителя) для управления громкоговорителями, ассоциированными с предполагаемыми положениями громкоговорителей. Таким образом, подход может позволить использовать также стандартный пульт дистанционного управления, предусмотренный для управления акустической системой, для точной калибровки положений динамиков.
В соответствии с необязательным признаком изобретения пользовательский переносной блок выполнен с возможностью определения по меньшей мере одной из оценки положения и оценки ориентации для пользовательского переносного блока в момент пользовательской активизации; и пользовательский переносной блок дополнительно содержит средство для передачи удаленному блоку по меньшей мере одной из оценки положения и оценки ориентации.
Это может обеспечить эффективный подход во многих вариантах осуществления и может, в частности, уменьшить объем данных, передаваемых от пользовательского переносного блока, посредством этого сокращая использование батареи и т.д. Пользовательский переносной блок может не требоваться, в частности, для передачи необработанных данных движения или данных, описывающих отдельные пользовательские активизации.
В соответствии с необязательным признаком изобретения, пользовательский переносной блок содержит датчик регистрации движения, и средство определения выполнено с возможностью определения данных движения в ответ на данные от датчика регистрации движения, причем датчик регистрации движения содержит по меньшей мере одно из: гироскопа, акселерометра и магнитометра.
Это может обеспечить улучшенную и/или упрощенную работу или сложность/стоимость.
В соответствии с необязательным признаком изобретения система дополнительно содержит средство для побуждения излучения звукового сигнала из первого положения громкоговорителя, которое нужно оценить; и средство для связывания пользовательской активизации, принятой в интервале времени, ассоциированном со звуковым излучением, с первым положением громкоговорителя.
Это может помочь пользователю в выполнении точной калибровки.
В соответствии с особенностью изобретения предоставляется способ определения оценок положений громкоговорителей, содержащий: определение данных движения для пользовательского переносного блока, причем данные движения описывают перемещение пользовательского переносного блока, и приема пользовательских активизаций, причем пользовательская активизация указывает, что текущая ориентация пользовательского переносного блока ассоциируется с положением громкоговорителя, когда принимается пользовательская активизация; определение данных ориентации, указывающих ориентацию пользовательского переносного блока в ответ на данные движения и формирование оценок положений громкоговорителей в ответ на данные движения и пользовательские активизации.
Эти и другие особенности, признаки и преимущества изобретения станут очевидными и будут разъяснены со ссылкой на вариант (варианты) осуществления, описываемые ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения будут описываться только в качестве примера со ссылкой на чертежи, на которых
фиг. 1 иллюстрирует настройку системы динамиков в традиционной пятиканальной системе объемного звука;
фиг. 2 иллюстрирует пример элементов системы для оценки положений динамиков в соответствии с некоторыми вариантами осуществления изобретения;
фиг. 3 иллюстрирует пример пульта дистанционного управления, содержащего элементы системы для оценки положений динамиков, в соответствии с некоторыми вариантами осуществления изобретения;
фиг. 4 иллюстрирует пример использования пульта дистанционного управления, содержащего элементы системы для оценки положений динамиков, в соответствии с некоторыми вариантами осуществления изобретения;
фиг. 5 иллюстрирует пример использования пульта дистанционного управления, содержащего элементы системы для оценки положений динамиков, в соответствии с некоторыми вариантами осуществления изобретения; и
фиг. 6 иллюстрирует пример использования пульта дистанционного управления, содержащего элементы системы для оценки положений динамиков, в соответствии с некоторыми вариантами осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ НЕКОТОРЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Нижеследующее описание сосредоточено на вариантах осуществления изобретения, применимых к оценке положений динамиков в системе объемного звука домашнего кинотеатра. Однако нужно будет принять во внимание, что изобретение не ограничивается этим применением, а может применяться для оценки положений динамиков во многих других акустических системах.
Фиг. 1 иллюстрирует настройку системы динамиков в традиционной пятиканальной системе объемного звука, например системе домашнего кинотеатра. Система содержит центральный динамик 101, предоставляющий центральный передний канал, левый передний динамик 103, предоставляющий левый передний канал, правый передний динамик 105, предоставляющий правый передний канал, левый тыловой динамик 107, предоставляющий левый тыловой канал, правый тыловой динамик 109, предоставляющий правый тыловой канал. Пять динамиков 101-109 вместе обеспечивают пространственное звуковое впечатление в положении 111 прослушивания и позволяют слушателю в этом месте получать окружающее и многонаправленное звуковое впечатление. Во многих системах домашнего кинотеатра система дополнительно предоставляет сабвуфер для канала Низкочастотных эффектов (LFE).
Однако в практических сценариях часто невозможно или неудобно размещать громкоговорители в идеальных местоположениях. Конечно, в практических системах фактическое положение динамиков может меняться очень существенно. Это может оказывать очень существенное влияние на восприятие звука в положении прослушивания, и, в частности, может значительно влиять на пространственное восприятие. Чтобы компенсировать отклонения динамиков, акустическая система может включать в себя компенсацию, которая специально приспособлена к фактическим положениям динамиков. Однако такие подходы зависят от точной оценки местоположений динамиков, чтобы обеспечить подходящую компенсацию.
Фиг. 2 иллюстрирует систему для оценки положений громкоговорителей в соответствии с некоторыми вариантами осуществления изобретения.
Система основывается на использовании датчиков движения в пользовательском переносном блоке, чтобы предоставить данные движения. Система дополнительно принимает пользовательские активизации, например нажатия клавиш, которые указывают, что текущее положение или ориентация пользовательского переносного блока связаны с положением динамика, то есть что они предоставляют указание положения динамика. Например, кнопка может нажиматься, когда пользовательский переносной блок указывает в направлении или находится на одном из громкоговорителей.
Система затем вычисляет положения динамиков из данных перемещения и пользовательских активизаций. Например, пользовательский переносной блок может располагаться в положении громкоговорителя или может указывать в направлении положения громкоговорителя, когда принимается пользовательская активизация. Направление или положение пользовательского переносного блока затем можно вычислить непосредственно в этот момент, и его можно использовать в качестве указания положения громкоговорителя (или даже можно использовать непосредственно в качестве положения динамика).
В частности, в системе датчики движения встраиваются в небольшое карманное устройство (например, пульт дистанционного управления системой домашнего кинотеатра), и эти датчики используются для определения положения громкоговорителей относительно положения прослушивания, а также ориентации пользователя относительно установки громкоговорителей. В частности, пользователю дается указание последовательно направить пользовательский переносной блок на громкоговорители из своего положения прослушивания или поместить пользовательский переносной блок рядом или сверху громкоговорителей. Эти определенные положения громкоговорителей (и при желании положение прослушивания и/или ориентация пользователя) затем используются для оптимизации пространственного звуковоспроизведения у системы громкоговорителей путем, например, применения подходящего переназначения звуковых сигналов.
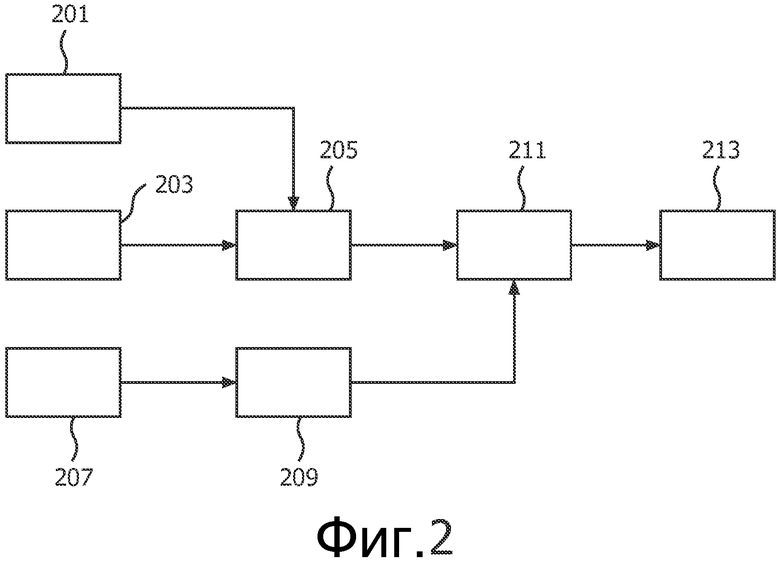
В примере фиг. 2 пользовательский переносной блок содержит первый и второй датчики 201, 203 движения, которые формируют данные движения, описывающие перемещение пользовательского переносного блока. Нужно будет принять во внимание, что в других вариантах осуществления может использоваться меньше или больше датчиков. Каждый из датчиков 201, 203 движения может включать в себя, в частности, один или несколько датчиков MEMS, таких как гироскоп, акселерометр или магнитометр.
Доступно многообразие датчиков движения MEMS, и они стремятся быть небольшими, несложными и недорогими, посредством этого приспособляя их для использования почти в любом устройстве, включая даже небольшие недорогие портативные устройства. Также точность таких датчиков относительно высока и постоянно улучшается.
Существуют разные типы датчиков MEMS, включая:
• акселерометры, которые измеряют линейное ускорение в 1, 2 или 3 измерениях;
• гироскопы, которые измеряют угловую скорость изменения в 1, 2 или 3 измерениях;
• магнитометры, которые измеряют угловую ориентацию относительно магнитного севера.
Первый и второй датчики 201, 203 движения соединяются с процессором 205 перемещения, который принимает сформированные данные от датчика. Процессор 205 перемещения, кроме того, соединен с анализирующим процессором, в который подаются данные движения, извлеченные или принятые от датчиков 201, 203.
К тому же система содержит интерфейс 207 пользователя, который выполнен с возможностью приема ввода от пользователя. Интерфейс пользователя может включать в себя, например, одну или несколько клавиш или кнопок, которые могут нажиматься пользователем. Интерфейс 207 пользователя соединяется с пользовательским процессором 209, который выполнен с возможностью обнаружения, принимается ли какой-нибудь ввод пользователя. В частности, пользовательский процессор 209 может обнаруживать, нажимает ли пользователь на клавишу или кнопку. Пользовательский процессор 209 дополнительно соединяется с анализирующим процессором 211, которому предоставляется указание пользовательской активизации всякий раз, когда обнаруживается ввод пользователя. В частности, всякий раз, когда пользователь нажимает на клавишу или кнопку, пользовательский процессор 209 формирует указание о пользовательской активизации и передает его в анализирующий процессор 211.
Анализирующий процессор 211 выполнен с возможностью оценивания одного или нескольких положений динамиков на основе принятых данных движения и пользовательских активизаций. Например, анализирующий процессор 211 может непрерывно оценивать положение пользовательского переносного блока и может фиксировать текущее положение, когда принимается пользовательская активизация. Затем он может использовать это положение непосредственно в качестве предполагаемого положения динамика. В качестве другого примера анализирующий процессор 211 может непрерывно обнаруживать направление пользовательского переносного блока и может фиксировать текущее направление, когда принимается пользовательская активизация. Анализирующий процессор 211 затем может приступить к оценке положения динамика относительно текущего местоположения пользовательского переносного блока (который может предполагаться находящимся в положении 111 прослушивания) на основе направления и, например, заранее установленного фиксированного допускаемого расстояния до положения динамика.
В примере анализирующий процессор 211 соединяется с контроллером 213 звуковой системы, который выполнен с возможностью управления работой звуковой системы, которая воспроизводит звук из динамиков, ассоциированных с положениями динамиков. Звуковая система может быть, например, усилителем домашнего кинотеатра, который приводит в действие набор громкоговорителей, ассоциированных (допускаемых как расположенные там) с предполагаемыми положениями динамиков. Контроллер 213 звуковой системы может управлять работой звуковой системы, так что он приспосабливается к конкретным предполагаемым положениям динамиков звуковой системы.
Например, задержка и/или уровень для каждого динамика может устанавливаться в зависимости от предполагаемого расстояния от динамика до положения прослушивания. Кроме того, когда известно точное предполагаемое положение для каждого динамика, могут использоваться существенно более сложные и гибкие адаптации. Например, контроллер 213 звуковой системы может определить, что один или несколько громкоговорителей с большей вероятностью ухудшают, нежели улучшают пространственное впечатление, и может соответственно исключить их из использования. Звуковую систему тогда можно оптимизировать для сценария, где соответствующее предполагаемое положение динамика не используется. Например, если окружной динамик находится слишком близко к положению прослушивания, то его можно отключить.
В качестве другого примера предполагаемое положение динамика может использоваться для предоставления расширенного пространственного сигнала путем предоставления гибкого распределения разных звуковых каналов по конкретным динамикам. Например, оценки положений динамиков могут указывать, что передний левый динамик 103 и правый передний динамик 105 устанавливаются очень близко к центральному динамику 101, тогда как левый окружной и правый окружной динамики 107, 109 устанавливаются сбоку, а не позади слушателя (например, потому что положение прослушивания соответствует дивану, расположенному рядом с задней стеной, посредством этого мешая тыловым окружным динамикам). В такой ситуации традиционная система объемного звучания будет обеспечивать относительно сжатое пространственное впечатление. Однако на основе оценок положений громкоговорителей контроллер 213 звуковой системы может управлять усилителем домашнего кинотеатра, чтобы воспроизвести левый передний канал через левый передний динамик 103 и левый окружной динамик 107. Это может обеспечить воспринимаемое положение для левого переднего канала между левым передним динамиком 103 и левым окружным динамиком 107, причем точное положение регулируется путем точного распределения левого переднего канала по двум громкоговорителям. Такой же подход может применяться к правому переднему каналу, посредством этого обеспечивая улучшенное и расширенное пространственное впечатление.
Нужно будет принять во внимание, что использование оценок положений громкоговорителей не ограничивается адаптацией или оптимизацией работы звуковой системы. Например, в некоторых вариантах осуществления система может оценить, удовлетворяют ли определенные положения громкоговорителей подходящему набору критериев, и может предоставить указание пользователю, если это не так. Например, система может обнаружить любые громкоговорители, которые считаются слишком близко находящимися к положению прослушивания, и может указать, что их следует отодвинуть еще дальше, или может обнаружить, например, настройку динамика, которая не достаточно симметрична, чтобы обеспечить подходящее пространственное звуковое впечатление, и соответственно может указать, что динамики следует переместить, чтобы обеспечить это впечатление.
Функциональные возможности фиг. 2 можно свободно распределить в системе.
Как правило, первый и второй датчики 201, 203 движения располагаются в пользовательском переносном блоке, как и процессор 205 перемещения. Таким образом, лежащие в основе необработанные данные движения обычно формируются в пользовательском переносном блоке.
Интерфейс 207 пользователя и пользовательский процессор 209 во многих вариантах осуществления также могут содержаться в пользовательском переносном блоке, так как это может обеспечить практическое взаимодействие с пользователем во многих сценариях. Например, пользователь может перемещать пользовательский переносной блок так, что он представляет или указывает положение динамика, и может затем просто нажать на кнопку на пользовательском переносном блоке, чтобы указать это. Однако в некоторых вариантах осуществления интерфейс 207 пользователя и пользовательский процессор 209 могут не быть частью пользовательского переносного блока, а могут быть частью другого устройства. Например, в некоторых вариантах осуществления интерфейс 207 пользователя и пользовательский процессор 209 могут содержаться в звуковой системе, управляющей громкоговорителями, например, она может быть частью усилителя домашнего кинотеатра.
Анализирующий процессор 211 в некоторых вариантах осуществления может полностью включаться в пользовательский переносной блок, в других вариантах осуществления он может находиться полностью снаружи пользовательского переносного блока, а в еще одних вариантах осуществления он может быть частично реализован в пользовательском переносном блоке.
Например, в некоторых вариантах осуществления пользовательский переносной блок может содержать только первый и второй датчики 201, 203 движения, а процессор 205 перемещения может содержать функцию связи для передачи необработанных данных движения, например, в усилитель звуковой системы. Усилитель звуковой системы может принимать необработанные данные движения и может содержать интерфейс 207 пользователя и пользовательский процессор 209, а также анализирующий процессор 211. Таким образом, всякий раз, когда нажимается кнопка на усилителе звуковой системы, он переходит к определению данных для соответствующего положения динамика, которое указано данными движения для пользовательского переносного блока. Преимущество такого варианта осуществления состоит в том, что он может допускать очень простой и несложный пользовательский переносной блок.
В аналогичном варианте осуществления пользовательский переносной блок может содержать интерфейс 207 пользователя и пользовательский процессор 209, но может просто сообщать всякий раз, когда принимается пользовательская активизация. Таким образом, в этом примере пользовательский процессор 209 может содержать функцию связи для передачи пользовательских входных данных, например, в усилитель звуковой системы. Усилитель звуковой системы может реализовывать анализирующий процессор 211, который определяет оценки положений динамиков на основе необработанных данных движения и пользовательских активизаций. Преимущество такой реализации состоит в том, что она может привести к несложному пользовательскому переносному блоку и, в частности, что она не требует никакого вычислительного ресурса, доступного в пользовательском переносном блоке.
В качестве другого примера анализирующий процессор 211 может быть полностью реализован в пользовательском переносном блоке, так что сам пользовательский переносной блок вычисляет оценки положений динамиков, которые затем могут быть переданы, например, в усилитель звуковой системы. Это может существенно снизить требование к информационному обмену для пользовательского переносного блока и может позволить использовать пользовательский переносной блок, например, с существующими усилителями, которые могут приспособить производительность к конкретным местоположениям динамиков, но сами не обладают функциональными возможностями для оценки положений.
Нужно будет принять во внимание, что возможны многие другие реализации и разновидности. Например, в некоторых сценариях пользовательский переносной блок сам может вычислять направление, ассоциированное с каждой пользовательской активизацией, и может передать его усилителю звуковой системы, который затем переходит к определению местоположений динамиков в зависимости от предоставленных направлений. Таким образом, при такой реализации анализирующий процессор 211 будет распределен по пользовательскому переносному блоку и усилителю звуковой системы. Нужно будет принять во внимание, что в таком примере нужно передавать только направления (например, не нужно передавать ни необработанные данные движения, ни пользовательские активизации). Таким образом, во многих сценариях такой промежуточный подход может обеспечить выгодный компромисс между, например, требованиями к вычислительным и коммуникационным ресурсам. Нужно будет принять во внимание, что один и тот же подход без труда может использоваться для связанных с пользовательскими активизациями положений в пользовательском переносном блоке.
В дальнейшем будут предоставлены различные примеры, в которых пользовательский переносной блок является карманным устройством, и в частности является пультом дистанционного управления. Использование пульта дистанционного управления может быть особенно выгодным, поскольку он уже содержит некоторые из необходимых функциональных возможностей, например интерфейс пользователя, функциональные возможности связи и вычислительный ресурс. Кроме того, часто он уже необходим для управления звуковой системой, и поэтому стоимость предоставления дополнительных функциональных возможностей оценки местоположения динамика может сохраняться очень низкой. Он также удобен для пользователя, так как пользователю не нужно дополнительного устройства, а его можно просто снабдить дополнительными функциональными возможностями от уже предоставленного устройства. Пульт дистанционного управления, в частности, может быть пультом дистанционного управления для усилителя звуковой системы.
В качестве примера работы системы оценка может основываться на определении положения пульта дистанционного управления из данных движения, когда принимается пользовательская активизация. Например, первый и второй датчики 201, 203 могут включать в себя акселерометры, которые предоставляют данные движения, которые все время дважды интегрируются пультом дистанционного управления для предоставления непрерывной оценки положения для пульта дистанционного управления. Пользователю тогда можно дать указание последовательно помещать пульт дистанционного управления сверху на громкоговорители в системе и нажимать на кнопку. Когда нажимается кнопка, положение регистрируется и считается соответствующим предполагаемому положению динамика.
Процесс может выполняться, в частности, относительно положения прослушивания. Например, процесс оценки может запускаться пользователем, занимающим положение прослушивания и нажимающим на кнопку. Это может сбросить вычисленное положение. Таким образом, положение прослушивания может быть исходным положением, относительно которого определяются положения динамиков. Пользователь затем может переместиться к первому динамику. Изменение положения отслеживается акселерометрами, которые предоставляют данные ускорения, которые дважды интегрируются для предоставления оценки положения относительно положения прослушивания. Когда пульт дистанционного управления размещается сверху первого динамика, кнопка нажимается и текущее вычисленное положение регистрируется для этого динамика. Пользователь затем может перейти к следующему динамику и нажать на кнопку, и это может повторяться для всех динамиков. Таким образом, анализирующий процессор 211 может оценить относительное положение пульта дистанционного управления для каждой пользовательской активизации на основе данных положения для пользовательской активизации. Оценки положений громкоговорителей затем определяются из этих относительных положений. В частности, они могут определяться непосредственно в качестве этих положений, то есть можно предположить, что относительные положения, ассоциированные с каждой пользовательской активизацией (нажатием клавиши), соответствуют непосредственно положению громкоговорителя.
В этом примере положения соответственно определяются относительно положения прослушивания. Это положение прослушивания определяется в качестве положения пульта дистанционного управления, когда принимается опорная пользовательская активизация, указывающая, что пульт дистанционного управления располагается в положении прослушивания. Эта опорная пользовательская активизация может быть, например, назначенным нажатием клавиши (например, назначенной кнопкой) или может быть, например, пользовательской активизацией в определенный момент, например первой или последней пользовательской активизацией процесса калибровки.
В качестве характерного примера фиг. 3 иллюстрирует пульт дистанционного управления, для которого задаются два направления x, y. Пульт дистанционного управления может включать в себя датчики движения в виде по меньшей мере одного двухкоординатного акселерометра, который измеряет ускорение в плоскости x-y пульта дистанционного управления. В этом сценарии пользователю, сидящему в нужном положении прослушивания, сначала можно дать указание направить пульт дистанционного управления в опорном направлении, которое, естественно, должно быть точно передним направлением пользователя или может быть направлением ассоциированного дисплея, и нажать на кнопку. Этот сценарий устанавливает данное направление в качестве опорного направления. К тому же он может установить текущее положение в исходное положение (например, он может сбросить значения интегрирующих функций для акселерометров оси x и y).
В конкретном примере предполагается, что пользователь держит пульт дистанционного управления в одной и той же ориентации в течение всей процедуры, то есть что пользователю дано указание не вращать пульт дистанционного управления вокруг любой из его осей. Также допускается, что все громкоговорители и положение прослушивания находятся на одной и той же высоте.
Пользователю затем дается указание подойти с пультом дистанционного управления к первому громкоговорителю.
Разные подходы могут использоваться для задания, какой громкоговоритель нужно указывать первым, например, просто с помощью руководства, задающего последовательность для калибровки, или, например, индикации на пульте дистанционного управления, указывающей следующий динамик, к которому нужно перейти.
В качестве конкретного примера система может быть выполнена с возможностью излучения звукового сигнала (только) из громкоговорителя в положении громкоговорителя, которое оценивается в настоящее время. Этот сигнал может тогда указывать, что пользователю следует идти к этому громкоговорителю. Система затем может связать пользовательскую активизацию, принятую в интервале времени, ассоциированном со звуковым излучением, с этим конкретным положением громкоговорителя. Например, если кнопка нажимается в течение времени, когда динамик излучает тестовый сигнал, то это нажатие кнопки считается указывающим, что пульт дистанционного управления располагается сверху этого динамика. Система тогда может приступить к излучению звука из следующего динамика в последовательности.
Пока пользователь идет к следующему громкоговорителю для оценки, траектория пульта дистанционного управления отслеживается акселерометрами, и данные ускорения дважды интегрируются, чтобы предоставить текущее положение на плоскости x-y. Когда пользователь достигает положения громкоговорителя, он помещает пульт дистанционного управления на громкоговоритель и нажимает на кнопку. Эта пользовательская активизация вызывает регистрацию текущего положения для громкоговорителя.
Пользователю затем дается указание идти к следующему громкоговорителю, поместить пульт дистанционного управления сверху этого динамика и снова нажать на кнопку. Эта процедура повторяется, пока не определены все положения громкоговорителей.
В конце этой процедуры зарегистрированы положения всех громкоговорителей относительно друг друга, а также относительно положения прослушивания и ориентации пользователя.
Отслеживание перемещений пульта дистанционного управления и определение положений может основываться, например, на необработанных данных от датчика, записываемых в виде функции времени в течение всей процедуры, вместе с моментами времени нажатий кнопок, и расчет физической траектории пульта дистанционного управления, а также положений громкоговорителей затем может вычисляться после того, как завершена процедура калибровки, например, другим блоком, нежели пульт дистанционного управления. В качестве другого примера положения громкоговорителей могут определяться непосредственно из данных от датчика во время процедуры калибровки, и могут сохраняться только сами определенные положения.
В примере вычисление траектории из необработанных данных акселерометра в основном включает в себя двойное интегрирование данных акселерометра. Такой подход полезен для акселерометров, которые являются достаточно точными. Однако многие недорогие акселерометры на основе MEMS могут страдать от проблем смещения (ухода), заставляющих двойное интегрирование приводить к растущей неточности со временем. В действительности двойное интегрирование может привести к ошибкам оценки положения, растущим относительно быстро. Соответственно, в некоторых вариантах осуществления может включаться компенсация этого смещения. В частности, тот факт, что скорость пульта дистанционного управления должна быть нулевой всякий раз, когда нажимается кнопка, может использоваться для определения и применения поправочного коэффициента для смещения. Таким образом, в дополнение к работе в качестве маркера для громкоговорителей на траектории моменты, в которые нажимается кнопка, также могут использоваться в качестве опорных точек для коррекции записанных данных от акселерометров. Конкретный пример определения подходящего поправочного коэффициента можно найти, например, в статье "Self-contained position tracking of human movement using small inertial/magnetic sensor modules" под авторством Yun и др. (Международная конференция IEEE по робототехнике и автоматизации - 2007, апрель 2007 г.).
В конкретном примере использовался один двухкоординатный акселерометр, и предполагалось, что пульт дистанционного управления всегда удерживается в одной и той же ориентации во время процедуры и что все громкоговорители и положение прослушивания находятся на одинаковой высоте. Однако это предположение может быть неподходящим во всех вариантах осуществления. Поэтому в некоторых вариантах осуществления можно разрешить вращение пульта дистанционного управления по любой из его осей, приводящее к более естественному движению человека, а также позволяющее точную калибровку громкоговорителей на разных высотах. Этого можно добиться путем добавления подходящих датчиков, например одно-, двух- или трехкоординатного гироскопа, акселерометра, измеряющего ускорение по аппликате (или, конечно, путем замены двухкоординатного акселерометра из первого варианта осуществления трехкоординатным), и/или магнитометра.
В некоторых вариантах осуществления оценки положений динамиков не основываются на положении пульта дистанционного управления, когда принимается пользовательская активизация, а основываются на ориентации пульта дистанционного управления в такой момент. В частности, положения динамиков могут оцениваться на основе направлений пульта дистанционного управления, когда принимаются пользовательские активизации.
В частности, система может оценивать направление из положения к громкоговорителю, когда нажимается кнопка. Положение может быть, в частности, положением прослушивания, а направление может быть направлением подходящей оси пульта дистанционного управления. Например, пользователь может занимать положение прослушивания и направлять пульт дистанционного управления в направлении громкоговорителя. Когда пользователь нажимает на кнопку, текущая ориентация пульта дистанционного управления определяется из данных движения. Например, направление оси x пульта дистанционного управления может определяться относительно опорного направления. Опорное направление может определяться слушателем, направляющим пульт дистанционного управления в нужное опорное направление (например, непосредственно вперед) и нажимающим на кнопку опорного направления. Перемещение пульта дистанционного управления между двумя направлениями может отслеживаться датчиками движения и использоваться для определения направлений в двух ситуациях. В качестве конкретного примера, когда принимается пользовательская активизация, пульт дистанционного управления может приступить к определению относительного угла между текущим направлением пульта дистанционного управления и направлением, когда принималась опорная пользовательская активизация.
Подход может повторяться для всех громкоговорителей, например, пользователь может приступить к последовательному указанию пультом дистанционного управления в направлении всех громкоговорителей и нажатию на кнопку (оставаясь при этом в том же месте). Положения динамиков тогда можно определить из этих направлений, например, предполагая, что каждый из громкоговорителей располагается в направлении пульта дистанционного управления и на заранее установленном расстоянии (например, 3 метра для переднего динамика, 3,5 метра для правого переднего и левого переднего динамиков и 2 метра для окружных динамиков).
В качестве несложного примера пульт дистанционного управления может содержать однокоординатный гироскоп, измеряющий угловую скорость пульта дистанционного управления вокруг вертикальной оси z (перпендикулярной к плоскости x-y на фиг. 3). Таким образом, угловая скорость в горизонтальной плоскости измеряется, если пульт дистанционного управления ориентирован параллельно плоскости земли.
В этом примере предполагается, что необходимы только углы отдельных громкоговорителей относительно пользователя (а также, возможно, ориентация пользователя). Это подразумевает, что все громкоговорители установлены на известном или достаточно надежно предполагаемом или допускаемом расстоянии от пульта дистанционного управления при выполнении калибровки. Например, может допускаться, что динамики находятся на практически равном расстоянии от положения слушателя в плоскости, параллельной плоскости земли, то есть что они практически расставлены по окружности вокруг положения прослушивания.
Пользователь, сидя в нужном положении прослушивания, тогда получает указание сначала направить пульт дистанционного управления в опорном направлении, которое обычно может быть строго передним направлением пользователя, а затем нажать на кнопку, чтобы предоставить указание опорной пользовательской активизации. Это устанавливает данное направление в качестве опорного направления.
Затем пользователю дается указание направить пульт дистанционного управления к первому громкоговорителю (например, в соответствии с заранее установленной последовательностью, предоставленной пользователю посредством индикации или руководства пользователя). Пока пользователь перемещает пульт дистанционного управления для направления его к громкоговорителю, вращательное движение пульта дистанционного управления отслеживается гироскопом. Затем, указывая на первый громкоговоритель, пользователь снова нажимает на кнопку. Потом пользователю дается указание направить пульт на второй громкоговоритель и нажать на кнопку, когда он указывает на него. Эта процедура повторяется, пока не определены все углы громкоговорителей.
В конце этой процедуры известны углы всех громкоговорителей относительно друг друга, а также относительно ориентации пользователя. Положение тогда можно определить из допускаемого расстояния. В качестве альтернативы или дополнительно, пользователь может вручную ввести расстояния до динамиков, либо могут использоваться другие методики измерения расстояний для определения расстояния. Например, чтобы измерить расстояние до каждого громкоговорителя, пульт дистанционного управления может содержать, например, микрофон. Звуковой сигнал затем может излучаться по очереди из каждого динамика и может использоваться для определения расстояния до динамика (например, используя звукометрические методики).
В качестве альтернативы использованию гироскопа можно добиться отслеживания направления наведения по азимуту с помощью двух 2-координатных (x-y) акселерометров, разделенных некоторым расстоянием (например, верхний и нижний край пульта дистанционного управления). Хотя один акселерометр не способен обнаружить вращение, можно определить вращение из анализа разности между результатами двух 2-координатных акселерометров (для чистого поступательного движения пульта дистанционного управления результаты двух акселерометров будут идентичны, тогда как для вращения вокруг точки между двумя акселерометрами их результаты будут иметь противоположные знаки для обеих осей).
Для очень точного определения положения наведение пульта дистанционного управления в этих примерах выполняется путем лишь вращения пульта дистанционного управления вокруг фиксированной точки, которая находится как можно ближе к положению прослушивания, например, так, что пульт дистанционного управления вращается без изменения положения датчика (или центра датчиков). Такой пример иллюстрируется на фиг. 4. Однако это также может иметь место в сценариях, в которых чистое вращение выполняется вокруг одной опорной точки, но без пульта дистанционного управления, находящегося в этой опорной точке. Например, такого чистого вращения можно добиться путем удержания пульта дистанционного управления вытянутой рукой, которая остается вытянутой в течение этой процедуры. Такой пример иллюстрируется на фиг. 5, которая также иллюстрирует, как фиксированная точка вращения является точкой, где рука соединяется с плечом (и соответственно положения динамиков будут определяться относительно этой точки).
Однако в ситуациях, где чистое вращение не достигается, например, если пульт дистанционного управления перемещается в направлении влево-вправо или вперед-назад или если он поворачивается вокруг своей оси z на значительном расстоянии от положения прослушивания, то изменение определенного угла может отклоняться от правильного значения. Такой пример иллюстрируется на фиг. 6.
Неточность может зависеть от количества перемещения пульта дистанционного управления и расстояния громкоговорителей от пульта дистанционного управления. Кроме того, ошибку можно исключить или смягчить путем добавления 2-координатных акселерометров, которые измеряют ускорение в горизонтальной плоскости x-y пульта дистанционного управления, и/или магнитометра. Такие подходы могут позволить отслеживать как вращение, так и перемещение пульта дистанционного управления во время операции наведения, и соответственно могут повысить точность и устойчивость определенных углов.
Если пульт дистанционного управления не удерживается ровно (то есть параллельно плоскости земли), а поворачивается вокруг оси x ("вертится") во время процедуры наведения, то могут возникнуть неточные результаты, поскольку выходной сигнал от гироскопов и/или акселерометров относится к системе отсчета пульта дистанционного управления, а не к системе отсчета земли (и громкоговорителей). Это можно решить путем добавления гироскопа, измеряющего угловую скорость вокруг оси x пульта дистанционного управления, и/или акселерометра, измеряющего ускорение в вертикальном направлении z пульта дистанционного управления (последний способ использует всегда присутствующую гравитационную силу в качестве эталона).
Если пульт дистанционного управления не удерживается ровно (то есть параллельно плоскости земли), а наклоняется вокруг оси y во время процедуры наведения, то также могут возникнуть неточные результаты. Это можно решить путем добавления гироскопа, измеряющего угловую скорость вокруг оси y пульта дистанционного управления, и/или акселерометра, измеряющего ускорение в вертикальном направлении пульта дистанционного управления.
Этот подход также может рассмотреть сценарии, в которых громкоговорители не располагаются в одной горизонтальной плоскости.
В предыдущих примерах дополнительные датчики используются для учета того факта, что пульт дистанционного управления может не удерживаться все время горизонтально. Чтобы иметь возможность исправить это, данные вращения и/или наклона могут постоянно отслеживаться, и результирующее вычисление траекторий может стать довольно сложным и/или неточным. Другой возможностью является простое указание пользователю держать пульт дистанционного управления горизонтально в течение процесса калибровки и простое допущение, что это действительно так, при вычислении траекторий. При желании могут включаться дополнительные датчики, но использоваться только для обнаружения, что пульт дистанционного управления наклоняется и/или вращается более чем на заданную величину. Если это обнаруживается во время процесса калибровки, то калибровка может быть прекращена, а в противном случае процесс калибровки может считаться достаточно точным.
Преимущество описанного подхода состоит в том, что когда один из громкоговорителей перемещается в другое положение после процесса калибровки, нужно перенастроить только положение этого громкоговорителя. Аналогичным образом, когда изменяется предпочтительное положение прослушивания, достаточно перенастроить лишь положение прослушивания. Например, в одном из вариантов осуществления, которые включают в себя акселерометры для измерения перемещения, это можно сделать путем выполнения процедуры калибровки, которая состоит из перемещения из прежнего положения прослушивания в новое положение.
В некоторых вариантах осуществления система может дополнительно поддерживать предоставление пользовательского ввода, указывающего, что положение громкоговорителя не используется. В этом случае система может обозначить соответствующее положение динамика как неиспользуемое. Это может использоваться, чтобы приспособить звуковую систему для компенсации этого отсутствующего динамика. Например, если окружной динамик не включается, то некоторая часть звука из канала окружения может подаваться через передние динамики.
Таким образом, в некоторых вариантах осуществления у пользователя может быть выбор для указания, что он не хочет использовать один или несколько громкоговорителей, например, путем нажатия на кнопку "не использовать", когда его просят подойти/указать на этот громкоговоритель. Соответственно, пользователь может указать, что он хочет использовать только подмножество динамиков, посредством этого разрешая пользователю, например, использовать невыбранные громкоговорители для другой цели или временно отключить один из громкоговорителей, например, если другой человек сидит очень близко к нему.
Нужно будет принять во внимание, что вышеприведенное описание для ясности описало варианты осуществления изобретения со ссылкой на разные функциональные блоки и процессоры. Однако станет очевидно, что может использоваться любое подходящее распределение функциональных возможностей между разными функциональными блоками или процессорами без приуменьшения изобретения. Например, функциональные возможности, проиллюстрированные как выполняемые отдельными процессорами или контроллерами, могут выполняться одним процессором или контроллером. Поэтому ссылки на конкретные функциональные блоки нужно рассматривать только в качестве ссылок на подходящее средство для обеспечения описанных функциональных возможностей, а не указания на строгую логическую или физическую структуру или организацию.
Изобретение может быть реализовано в любой подходящей форме, включая аппаратные средства, программное обеспечение, микропрограммное обеспечение или любое их сочетание. Изобретение при желании может быть реализовано, по меньшей мере частично, в виде компьютерного программного обеспечения, выполняемого на одном или нескольких процессорах данных и/или цифровых процессорах сигналов. Элементы и компоненты из варианта осуществления изобретения могут быть физически, функционально и логически реализованы любым подходящим способом. В действительности функциональные возможности могут быть реализованы в одном блоке, в множестве блоков или как часть других функциональных блоков. По существу, изобретение может быть реализовано в одном блоке или может быть физически и функционально распределено между разными блоками и процессорами.
Хотя настоящее изобретение описано применительно к некоторым вариантам осуществления, оно не предназначено, чтобы ограничиваться конкретной формой, изложенной в этом документе. Наоборот, объем настоящего изобретения ограничивается только прилагаемой формулой изобретения. Более того, хотя признак может казаться описанным по отношению к конкретным вариантам осуществления, специалист в данной области техники признал бы, что различные признаки описанных вариантов осуществления могут объединяться в соответствии с изобретением. В формуле изобретения термин "содержащий" не исключает наличия других элементов или этапов.
Кроме того, хотя и не перечислено отдельно, множество средств, элементов или этапов способа могут быть реализованы, например, одиночным блоком или процессором. Более того, хотя отдельные признаки могут включаться в разные пункты формулы изобретения, они могут по возможности выгодно объединяться, и включение в разные пункты формулы не подразумевает, что сочетание признаков не является осуществимым и/или выгодным. Также включение признака в одну категорию пунктов формулы не подразумевает ограничение этой категорией, а скорее указывает, что при необходимости признак в равной степени применим к другим категориям пунктов формулы. Кроме того, порядок признаков в формуле изобретения не подразумевает никакого конкретного порядка, в котором должны обрабатываться признаки, и, в частности, порядок отдельных этапов в пункте формулы изобретения на способ не подразумевает, что этапы должны выполняться в этом порядке. Скорее, этапы могут выполняться в любом подходящем порядке. К тому же единичные ссылки не исключают множества. Таким образом, ссылки на "первый", "второй" и т.д. не препятствуют множеству. Ссылочные позиции в формуле изобретения предоставляются лишь в качестве поясняющего примера и не должны толковаться как ограничивающие объем формулы изобретения каким-либо образом.




Изобретение относится к средствам для определения оценок положений громкоговорителей в системах объемного звука. Технический результат заключается в повышении точности определения оценки положений громкоговорителей в системах объемного звука. Система содержит датчики движения (201, 203, 205), выполненные с возможностью определения данных движения для пользовательского переносного блока, где данные движения описывают перемещение пользовательского переносного блока. Пользовательское устройство ввода (207, 209) принимает пользовательские активизации, которые указывают, что по меньшей мере одно из текущего положения и ориентации пользовательского переносного блока ассоциируется с положением громкоговорителя, когда принимается пользовательская активизация. Пользовательская активизация может возникать в результате, например, нажатия на кнопку пользователем. Анализирующий процессор (211) затем формирует оценки положений громкоговорителей в ответ на данные движения и пользовательские активизации. Система может позволить, например, оценку положений динамиков на основе карманного устройства, например пульта дистанционного управления, направленного на динамик или размещенного на нем. 2 н. и 12 з.п. ф-лы, 6 ил.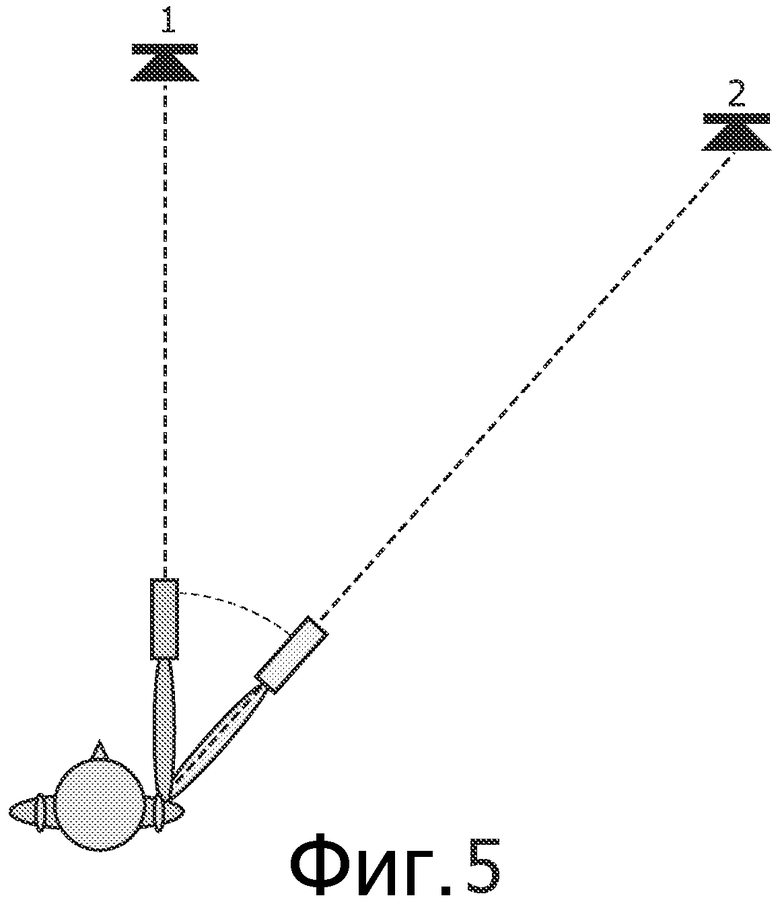
1. Система для определения оценок положений громкоговорителей, содержащая:
- средство (201, 203, 205) для определения данных движения для пользовательского переносного блока, причем данные движения описывают перемещение пользовательского переносного блока, и
- пользовательское устройство ввода (207, 209) для приема пользовательских активизаций, причем пользовательская активизация указывает, что текущая ориентация пользовательского переносного блока ассоциируется с положением громкоговорителя, когда принимается пользовательская активизация; и
- анализирующее средство (211) для определения данных ориентации, указывающих ориентацию пользовательского переносного блока, в ответ на данные движения, и для формирования оценок положений громкоговорителей в ответ на данные движения и пользовательские активизации.
2. Система по п.1, в которой анализирующее средство (211) выполнено с возможностью оценки направления из некоторого положения к положению громкоговорителя для каждой из множества пользовательских активизаций в ответ на данные ориентации для пользовательских активизаций; и определения оценок положений громкоговорителей в ответ на эти направления.
3. Система по п.1, в которой анализирующее средство (211) выполнено с возможностью определения оценок положений громкоговорителей в ответ на заранее установленную оценку расстояния от этого положения до каждого положения громкоговорителя.
4. Система по п.1, в которой анализирующее средство (211) выполнено с возможностью определения данных положения, указывающих положение переносного блока, в ответ на данные движения.
5. Система по п.4, в которой анализирующее средство (211) выполнено с возможностью оценки относительного положения пользовательского переносного блока для каждой из множества пользовательских активизаций в ответ на данные положения, ассоциированные с пользовательскими активизациями; и определения оценок положений громкоговорителей в ответ на относительные положения.
6. Система по п.5, в которой оценки положений громкоговорителей определяются при допущении, что каждое относительное положение соответствует положению громкоговорителя.
7. Система по п.1, в которой пользовательское устройство ввода (207, 209) выполнено с возможностью приема опорной пользовательской активизации, указывающей, что текущее положение или ориентация пользовательского переносного блока ассоциируется с исходной точкой положения прослушивания, а анализирующее средство (211) выполнено с возможностью определения исходного положения или ориентации в ответ на опорную пользовательскую активизацию и определения оценок положений динамиков в ответ на исходное положение или ориентацию.
8. Система по п.7, в которой анализирующее средство (211) выполнено с возможностью определения оценок положений динамиков относительно положения прослушивания (111).
9. Система по п.1, в которой пользовательское устройство ввода (207, 209) выполнено с возможностью приема пользовательского ввода, указывающего, что положение громкоговорителя не используется; и анализирующее средство (211) выполнено с возможностью обозначения соответствующего положения динамика как неиспользуемого.
10. Система по п.1, в которой пользовательский переносной блок является карманным устройством.
11. Система по п.1, в которой пользовательский переносной блок выполнен с возможностью определения по меньшей мере одной из оценки положения и оценки ориентации для пользовательского переносного блока в момент пользовательской активизации; и пользовательский переносной блок дополнительно содержит средство для передачи удаленному блоку по меньшей мере одной из оценки положения и оценки ориентации.
12. Система по п.1, в которой пользовательский переносной блок содержит датчик регистрации движения (201, 203), и средство определения выполнено с возможностью определения данных движения в ответ на данные от датчика регистрации движения (201, 203), причем датчик регистрации движения (201, 203) содержит по меньшей мере одно из:
- гироскоп;
- акселерометр; и
- магнитометр.
13. Система по п.1, дополнительно содержащая средство для побуждения излучения звукового сигнала из первого положения громкоговорителя, которое оценивают; и средство для связывания пользовательской активизации, принятой в интервале времени, ассоциированном со звуковым излучением, с первым положением громкоговорителя.
14. Способ определения оценок положений громкоговорителей, содержащий этапы, на которых:
- определяют данные движения для пользовательского переносного блока, причем данные движения описывают перемещение пользовательского переносного блока, и
- принимают пользовательские активизации, причем пользовательская активизация указывает, что текущая ориентация пользовательского переносного блока ассоциируется с положением громкоговорителя, когда принимается пользовательская активизация;
- определяют данные ориентации, указывающие ориентацию пользовательского переносного блока, в ответ на данные движения; и
- формируют оценки положений громкоговорителей в ответ на данные движения и пользовательские активизации.
| WO 2006033074 A1, 30.03.2006 |

