Ссылка на родственные заявки
Данная заявка является частичным продолжением и притязает на приоритет патентной заявки США №. 12/471,062, под названием “Sensing Assembly For Mobile Device”, поданной 22 мая 2009 г., которая, таким образом, включена сюда в порядке ссылки.
Область техники
Настоящее изобретение относится, в целом, к электронным устройствам и, в частности, к электронному устройству, имеющему инфракрасный узел восприятия для обнаружения и интерпретации жестов, которые осуществляются объектом, смещенным относительно узла восприятия и/или экрана дисплея электронного устройства.
Уровень техники
Мобильные устройства, например, сотовые телефоны, смартфоны и другие карманные или портативные электронные устройства, например карманные персональные компьютеры (КПК), головные гарнитуры, MP3-плееры и т.д. приобрели популярность и получили широкое распространение. По мере добавления в мобильные устройства все большего количества дополнительных функций, развивается потребность в оборудовании этих мобильных устройств механизмами ввода/вывода, способными принимать многочисленные команды пользователя и/или реагировать на многочисленные действия пользователя. Например, многие мобильные устройства в настоящее время оборудованы не только кнопками или клавишами/кнопочными панелями, но также емкостными сенсорными экранами, с помощью которых пользователь, просто касаясь поверхности мобильного устройства и/или водя пальцем по поверхности мобильного устройства, способен передавать на мобильное устройство различные сообщения или инструкции.
Увеличивается потребность в мобильных устройствах, способных обнаруживать присутствие и определять с некоторой точностью позицию физических объектов, находящихся вне мобильных устройств и, в частности, присутствие и положение человеческих существ (или частей их тел, например, голов или рук), которые используют мобильные устройства или по иной причине располагаются вблизи мобильных устройств. Благодаря таким возможностям, мобильные устройства способны тем или иным образом регулировать свое поведение в соответствии с присутствием (или отсутствием) и положением человеческих существ и/или других физических объектов.
Хотя традиционные устройства, например, емкостные сенсорные экраны полезны в качестве устройств ввода/вывода для телефонов, такие сенсорные экраны являются довольно сложными электронными устройствами, обладающими высокой стоимостью и требующие большого количества воспринимающих устройств, распределенных по большой площади поверхности телефона. Кроме того, такие сенсорные экраны ограничены тем, что позволяют пользователю обеспечивать входные сигналы, только если пользователь физически касается сенсорного экрана. Кроме того, хотя дистанционные воспринимающие устройства, например, инфракрасные (или, точнее, работающие в ближнем инфракрасном диапазоне) приемопередатчики ранее применялись в некоторых мобильных устройствах для обеспечения обнаружения присутствия и/или положения человеческих существ и/или физических объектов даже в отсутствие физического контакта с мобильными устройствами, такие воспринимающие устройства были ограничены различных отношениях.
В частности, некоторые такие приемопередатчики, работающие в ближнем инфракрасном диапазоне, в некоторых таких мобильных устройствах способны обнаруживать присутствие или отсутствие человеческого существа/физического объекта лишь в пределах определенного расстояния от данного приемопередатчика (например, бинарно обнаруживать, что человеческое существо/физический объект находится в пределах заранее определенного расстояния от или вблизи приемопередатчика), но не способны обнаруживать трехмерное положение человеческого существа/физического объекта в трехмерном пространстве относительно приемопередатчика. Кроме того, некоторые такие приемопередатчики в некоторых таких мобильных устройствах чрезмерно сложны или требуют большого количества компонентов для своей работы, что, в свою очередь, чрезмерно удорожает такие устройства.
Поэтому, по вышеизложенным причинам, было бы полезно, если бы можно было разработать новое воспринимающее устройство или воспринимающие устройства, пригодные для одного или нескольких типов электронных устройств, позволяющие преодолеть одно или несколько из вышеописанных ограничений и/или одно или несколько других ограничений.
Краткое описание чертежей
Фиг. 1 - вид спереди иллюстративного электронного устройства, где применяется иллюстративный узел восприятия пирамидального типа, позволяющий воспринимать положение иллюстративного внешнего объекта (изображенного частично), в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг. 2 - блок-схема, демонстрирующая иллюстративные компоненты электронного устройства, показанного на фиг. 1.
Фиг. 3 - вид спереди в перспективе, более подробно демонстрирующий компоненты узла восприятия пирамидального типа, показанного на фиг. 1.
Фиг. 4 - вид спереди в перспективе, демонстрирующий компоненты альтернативного варианта осуществления узла восприятия пирамидального типа, отличающегося от показанного на фиг. 1 и 3, в соответствии с другим вариантом осуществления настоящего изобретения.
Фиг. 5 - вид спереди в перспективе, демонстрирующий компоненты дополнительного альтернативного варианта осуществления узла восприятия пирамидального типа, отличающегося от показанного на фиг. 1, 3 и 4, в соответствии с еще одним вариантом осуществления настоящего изобретения.
Фиг. 6 - вид сбоку электронного устройства, узла восприятия и внешнего объекта (снова изображенного частично), в соответствии с фиг. 1, дополнительно демонстрирующий процесс восприятия положения внешнего объекта.
Фиг. 7 - логическая блок-схема, демонстрирующая иллюстративные этапы работы узла восприятия (и устройства обработки, действующего совместно с ним), в соответствии с, по меньшей мере, некоторыми вариантами осуществления настоящего изобретения.
Фиг. 8 и 9 - виды спереди двух иллюстративных электронных устройств, где может применяться узел восприятия пирамидального типа, показанный на фиг. 3, 4 или 5.
Фиг. 10 - еще один альтернативный вариант осуществления узла восприятия, который отличается от показанного на фиг. 4 тем, что узел восприятия не относится к пирамидальному типу, но использует линзу, в результате чего узел восприятия ведет себя аналогично узлу восприятия пирамидального типа, показанному на фиг. 4.
Фиг. 11 - дополнительный альтернативный вариант осуществления узла восприятия, отличающийся от показанных на фиг. 1-6 и 8-10, который включает в себя призменно-зеркальную конструкцию, которая принимает свет от множества различных соответствующих фотопередатчиков, находящихся в соответствующих положениях, разнесенных друг от друга и от положения призменно-зеркальной конструкции.
Фиг. 12-14 последовательно иллюстрируют жест отдаления, осуществляемый путем перемещения руки к электронному устройству.
Фиг. 15-17 последовательно иллюстрируют скользящий жест, осуществляемый путем перемещения руки параллельно электронному устройству.
Фиг. 18 - иллюстративный способ обнаружения жеста.
Фиг. 19 - иллюстративный график зависимости интенсивности от времени для жеста отдаления.
Фиг. 20 - иллюстративный график зависимости интенсивности от времени для жеста приближения.
Фиг. 21 - иллюстративный график зависимости интенсивности от времени для скользящего жеста в отрицательном направлении оси x.
Фиг. 22 - иллюстративный график зависимости интенсивности от времени для скользящего жеста в отрицательном направлении оси y.
Фиг. 23 - график, демонстрирующий анализ распознавания горизонтального маха.
Фиг. 24 - график, демонстрирующий анализ, позволяющий отличить горизонтальный мах от вертикального маха.
Фиг. 25 - иллюстративный график зависимости интенсивности от времени для скользящего жеста в положительном направлении оси x, осуществляемого рукой в конфигурации символа мира.
Фиг. 26 - иллюстративный график зависимости интенсивности от времени для жеста парения, выполняемого после жеста отдаления.
Фиг. 27 - иллюстративный график зависимости интенсивности от времени для жеста наклона.
Фиг. 28-31 - последовательность жестов, включающая в себя жест отдаления, жест наклона и скользящий жест.
Фиг. 32-33 - электронное устройство, которым можно управлять с использованием смещенных жестов.
Подробное описание
Инфракрасный узел восприятия позволяет обнаруживать один или несколько жестов, причем жесты представляют собой заранее определенные шаблоны перемещения внешнего объекта относительно электронного устройства, которое также включает в себя процессор, связанный с узлом восприятия. Эти жесты могут быть заданы для осуществления в трехмерном пространстве и могут включать в себя, например, жест приближения/отдаления (перемещение объекта к электронному устройству или от него по оси z), скользящий жест (перемещение объекта в плоскости xy параллельно электронному устройству), парящий жест (стационарное перемещение объекта в течение заранее определенного времени), и жест наклона (поворот объекта относительно оси крена, тангажа или рыскания). Обнаружение этих жестов можно использовать для управления электронным устройством различными способами. Инфракрасный узел восприятия может быть выполнен в различных формах и включает в себя один или несколько фотопередатчиков, которые управляются для излучения инфракрасного света из электронного устройства для отражения внешним объектом, и один или несколько фотоприемников для приема света, излученного из фотопередатчика(ов) и отраженного от внешнего объекта.
Например, узел восприятия может включать в себя, по меньшей мере, один фотоприемник и множественные фотопередатчики, причем каждый фотопередатчик расположен так, чтобы излучать инфракрасный свет из электронного устройства вдоль соответствующей центральной оси передачи, причем каждая центральная ось передачи ориентирована в отличном направлении относительно других. Процессор управляет фотопередатчиками так, чтобы каждый из них излучал инфракрасный свет в течение соответствующей части каждого из множества последовательных периодов времени (или в одно и то же время в течение каждого периода времени, что дополнительно описано ниже) при перемещении внешнего объекта согласно указанному шаблону перемещения. Для каждого из фотопередатчиков и для каждого из последовательных периодов времени, генерируется соответствующий измеренный сигнал, указывающий соответствующее количество инфракрасного света, исходящего из этого фотопередатчика в течение этого периода времени и отраженного внешним объектом до приема фотоприемником. Измеренные сигналы можно делить на наборы измеренных сигналов, каждый из которых соответствует соответствующему фотопередатчику и включает в себя значения интенсивности на протяжении времени (в течение множественных периодов времени). Эти наборы можно анализировать для определения соответствующих положений внешнего объекта во множественные моменты времени и для обнаружения заранее определенных шаблонов перемещения, поскольку каждый набор измеренных сигналов способен обеспечивать информацию относительно того, находится ли объект в соответствующей области трехмерного пространства, достижимой для инфракрасного света. Затем электронным устройством можно управлять на основании идентифицированных положений или шаблонов перемещения.
В порядке другого примера, узел восприятия может включать в себя единичный фотопередатчик и множественные фотоприемники, причем фотоприемники размещены так, чтобы принимать инфракрасный свет вдоль соответствующей центральной оси приема, причем каждая центральная ось приема ориентирована в отличном направлении относительно других. В этом случае, фотопередатчик управляется для излучения света в течение каждого из множества последовательных периодов времени, и для каждого из фотоприемников и в течение каждого из периодов времени, генерируется соответствующий измеренный сигнал, указывающий соответствующее количество инфракрасного света, исходящего из фотопередатчика в течение этого периода времени и отраженного внешним объектом до приема этим фотоприемником. В свою очередь, измеренные сигналы можно делить на наборы измеренных сигналов, каждый из которых в этом случае соответствует соответствующему фотоприемнику и включает в себя значения интенсивности на протяжении времени (в течение множественных периодов времени). Эти наборы можно анализировать для определения соответствующих положений внешнего объекта во множественные моменты времени для обнаружения заранее определенных шаблонов перемещения и для соответствующего управления электронным устройством.
Может оказаться полезным осуществлять определенные жесты со смещением относительно, в целом, центрированного положения над узлом восприятия, особенно в случае, когда узел восприятия находится в непосредственной близости к экрану дисплея, и жесты используются для управления индикатором (например, курсором или другим элементом) на экране дисплея. Например, может оказаться предпочтительным осуществлять жесты для управления положением и/или ориентацией индикатора на экране дисплея в стороне от узла восприятия и экрана дисплея, чтобы не заслонять экран дисплея в ходе выполнения жестов. Процедура интерпретации смещенного жеста может выполняться для обнаружения смещенных жестов и запускаться первым указанным шаблоном перемещения объекта.
На фиг. 1 показано иллюстративный электронное устройство 102, которое включает в себя, в числе своих различных компонентов, иллюстративный узел восприятия 104. Показано, что электронное устройство 102 является мобильным устройством, например, карманным персональным компьютером (КПК), хотя электронное устройство также призвано представлять различные другие устройства, охватываемые объемом настоящего изобретения, в том числе, например, сотовые телефоны, смартфоны, другие карманные или портативные электронные устройства, например, компьютеры типа ноутбук или лэптоп, головные гарнитуры, MP3-плееры и другие портативные видео- и аудиоплееры, устройства навигации (например, продаваемые Garmin International, Inc., Olathe, Канзас), устройства ввода с сенсорным экраном, перьевые устройства ввода, другие мобильные устройства и прочие устройства, включающие в себя самые различные устройства, которые могут использовать или пользоваться направленным управлением или управлением на основании воспринятого присутствия и положения одного или нескольких внешних объектов (например, телевизоры, киоски, банкоматы, торговые автоматы, автомобили и т.д.). В число компонентов электронного устройства 102, показанного на фиг. 1, также входят видеоэкран 106, кнопочная панель 108, имеющая многочисленные клавиши, и группа клавиш навигации (в этом случае, “пятикнопочная навигационная зона”) 110.
Как будет описано более подробно со ссылкой на фиг. 3, узел восприятия 104 в настоящем варианте осуществления является первым вариантом осуществления узла восприятия пирамидального типа, который можно использовать для обнаружения присутствия объекта (или собрания объектов), внешнего по отношению к электронному устройству 102 (и внешнего по отношению к самому узлу восприятия). В зависимости от обстоятельств, воспринимаемый физический объект (или объекты) может включать в себя различные неживые объекты и/или, по меньшей мере, в некоторых обстоятельствах, одну или несколько частей тела человеческого существа, использующего электронное устройство (или по иной причине находящегося вблизи электронного устройства), например, голова человеческого существа или показанная (частично), рука 111 человеческого существа. В настоящем варианте осуществления, узел восприятия 104 не только обнаруживает присутствие такого объекта в отношении того, находится ли такой объект достаточно близко к узлу восприятия (и/или электронному устройству), но также обнаруживает трехмерное положение объекта относительно электронного устройства 102 в трехмерном пространстве и в различные моменты времени.
В настоящем варианте осуществления, узел восприятия 104 передает один или несколько (обычно множественные) инфракрасные сигналы 113 из узла восприятия, причем инфракрасные сигналы 113 генерируются одним или несколькими инфракрасными фотопередатчиками (например, фотосветодиодами (фото-СИД)). В частности, фотопередатчики могут, но не обязаны, являться фото-СИД, работающими в ближнем инфракрасном диапазоне, передающими свет с длиной волны в диапазоне приблизительно от 850 до 890 нанометров. Затем части инфракрасного(ых) сигнала(ов) 113 отражаются присутствующим объектом (или более чем одним объектом), например, рукой 111, с образованием одного или нескольких отраженных сигналов 115. Отраженные сигналы 115, в свою очередь, воспринимаются одним или несколькими устройствами восприятия инфракрасного света или фотоприемниками (например, фотодиодами), которые, в частности, могут (но не обязаны) могут быть пригодны для приема света ближнего инфракрасного диапазона, имеющего длину волны в вышеупомянутом диапазоне. Как будет описано более подробно ниже, благодаря применению либо множественных фотопередатчиков, либо множественных фотоприемников, можно точно определить трехмерную позицию руки 111 относительно узла восприятия (и, таким образом, относительно электронного устройства).
Блок-схема, изображенная на фиг. 2, демонстрирует иллюстративные внутренние компоненты 200 электронного устройства 102, реализованного в виде мобильного устройства, в соответствии с настоящим изобретением. Иллюстративный вариант осуществления включает в себя беспроводные приемопередатчики 202, процессор 204 (например, микропроцессор, микрокомпьютер, специализированную интегральную схему и т.д.), блок памяти 206, одно или несколько устройств вывода 208 и одно или несколько устройств ввода 210. По меньшей мере, в некоторых вариантах осуществления предусмотрен пользовательский интерфейс, который одно или несколько устройств вывода 208 и одно или несколько устройств ввода 210. Внутренние компоненты 200 могут дополнительно включать в себя компонентный интерфейс 212 для обеспечения прямого подключения к вспомогательным компонентам или аксессуарам для дополнения или расширения функциональных возможностей. Внутренние компоненты 200, предпочтительно, также включают в себя источник питания 214, например аккумулятор, для обеспечения электропитания других внутренних компонентов. Как будет описано более подробно, внутренние компоненты 200 в настоящем варианте осуществления дополнительно включают в себя датчики 228, например, узел восприятия 104, показанный на фиг. 1. Все внутренние компоненты 200 могут быть соединены друг с другом и осуществлять связь друг с другом по одной или нескольким внутренним линиям связи 232 (например, внутренней шине).
Каждый из беспроводных приемопередатчиков 202 использует беспроводную технологию связи, например, но без ограничения, технологии сотовой связи, например, аналоговую связь (с использованием AMPS), цифровую связь (с использованием CDMA, TDMA, GSM, iDEN, GPRS, EDGE и т.д.), и связь следующего поколения (с использованием UMTS, WCDMA, LTE, IEEE 802.16 и т.д.) или их вариации, или технологии одноранговой сети или специализированной связи, например, HomeRF, Bluetooth и IEEE 802.11 (a, b, g или n), или другие технологии беспроводной связи, например инфракрасную технологию. В настоящем варианте осуществления, беспроводные приемопередатчики 202 включают в себя как приемопередатчики 203 сотовой сети, так и приемопередатчик 205 беспроводной локальной сети (WLAN), хотя в других вариантах осуществления предусмотрен только один из этих типов беспроводных приемопередатчиков (и, возможно, ни один их этих типов беспроводных приемопередатчиков и/или другие типы беспроводных приемопередатчиков). Кроме того, количество беспроводных приемопередатчиков может варьироваться от нуля до любого положительного числа, и, в некоторых вариантах осуществления, предусмотрен только один беспроводной приемопередатчик, и кроме того, в зависимости от варианта осуществления, каждый беспроводной приемопередатчик 202 может включать в себя как приемник, так и передатчик, или только одно из этих устройств.
Иллюстративная работа беспроводных приемопередатчиков 202 совместно с другими внутренними компонентами 200 электронного устройства 102 может принимать различные формы и может включать в себя, например, работу, в которой, приняв беспроводные сигналы, внутренние компоненты детектируют сигналы связи, и приемопередатчик 202 демодулирует сигналы связи для восстановления входящей информации, например, речи и/или данных, передаваемых посредством беспроводных сигналов. Приняв входящую информацию от приемопередатчика 202, процессор 204 форматирует входящую информацию для одного или нескольких устройств вывода 208. Аналогично, для передачи беспроводных сигналов, процессор 204 форматирует исходящую информацию, которая может быть или не быть активирована устройствами ввода 210, и переносит исходящую информацию на один или несколько из беспроводных приемопередатчиков 202 для модуляции сигналов связи. Беспроводной(ые) приемопередатчик(и) 202 переносят модулированные сигналы на удаленное устройство, например, базовую станцию или удаленный сервер (не показан).
В зависимости от варианта осуществления, устройства ввода и вывода 208, 210 внутренних компонентов 200 могут включать в себя различные визуальные, звуковые и/или механические устройства вывода. Например, устройство(а) вывода 208 может/могут включать в себя визуальное устройство вывода 216, например жидкокристаллический дисплей и светодиодный индикатор, звуковое устройство вывода 218, например, громкоговоритель, устройство звуковой сигнализации и/или зуммер, и/или механическое устройство вывода 220, например, вибрационный механизм. Визуальные устройства вывода 216, помимо прочего, могут включать в себя видеоэкран 106, показанный на фиг. 1. Аналогично, в порядке примера, устройства ввода 210 могут включать в себя визуальное устройство ввода 222, например, оптический датчик (например, камера), звуковое устройство ввода 224, например, микрофон, и механическое устройство ввода 226, например, датчик Холла, акселерометр, клавиатуру, кнопочную панель, кнопку выбора, сенсорную панель, сенсорный экран, емкостной датчик, датчик движения и/или переключатель. Механическое устройство ввода 226 может, в частности, включать в себя, помимо прочего, кнопочную панель 108 и группу клавиш навигации 110, показанные на фиг. 1. Действия, которые могут активировать одно или несколько устройств ввода 210, может включать в себя, но без ограничения, открывание электронного устройства, разблокировку устройства, перемещение устройства и эксплуатацию устройства.
Хотя датчики 228 внутренних компонентов 200 можно, по меньшей мере, в некоторых обстоятельствах, можно рассматривать как находящиеся в составе устройств ввода 210, в связи с особой важностью одного или нескольких из этих датчиков 228 для настоящего варианта осуществления, датчики описаны независимо от устройств ввода 210. В частности, показано, что датчики 228 могут включать в себя как датчики близости 229, так и другие датчики 231. Как будет описано более подробно, датчики близости 229 могут включать в себя, помимо прочего, один или несколько датчиков, например, узел восприятия 104, показанный на фиг. 1, который позволяет электронному устройству 102 обнаруживать присутствие (например, тот факт, что электронное устройство находится достаточно близко) и положение одного или нескольких внешних объектов, в том числе части тела человеческого существа, например, руки 111, показанной на фиг. 1. В сравнении, другие датчики 231 могут включать в себя другие типы датчиков, например акселерометр, гироскоп или любой другой датчик, позволяющий идентифицировать текущее положение или ориентацию электронного устройства 102.
Блок памяти 206 внутренних компонентов 200 может охватывать одно или несколько запоминающих устройств различных типов (например, постоянную память, оперативную память, статическую оперативную память, динамическую оперативную память и т.д.), и может использоваться процессором 204 для сохранения и извлечения данных. Данные, хранящиеся в блоке памяти 206, могут включать в себя, но без ограничения, операционные системы, приложения и информационные данные. Каждая операционная система включает в себя выполнимый код, который управляет основными функциями устройства связи, например, взаимодействием различных внутренних компонентов 200, связью с внешними устройствами через беспроводные приемопередатчики 202 и/или компонентный интерфейс 212 и сохранением приложений и данных в блоке памяти 206 и их извлечением из него. Каждое приложение включает в себя выполнимый код, который использует операционную систему для обеспечения более частных функциональных возможностей устройств связи, например, службы файловой системы и манипулирования защищенными и незащищенными данными, хранящимися в блоке памяти 206. Информационные данные представляют собой невыполнимый код или информацию, к которой операционная система или приложение может обращаться и/или которой они могут манипулировать для осуществления функций устройства связи.
На фиг. 3 более подробно показаны компоненты узла восприятия 104, изображенного на фиг. 1. Показано, что узел восприятия 104, в частности, включает в себя корпусную конструкцию 340 пирамидального типа, которую, в частности, можно рассматривать как тетраэдрическую конструкцию, круглую в поперечном сечении и имеющую первую, вторую и третью наклонные поверхности 342, 344 и 346, соответственно, отходящие вниз от треугольной верхней поверхности 348. В наклонные поверхности 342, 344 и 346 встроены первый, второй и третий фотопередатчики 352, 354 и 356, соответственно, которые, как отмечено выше, могут представлять собой фото-СИД, пригодные для излучения инфракрасного света. Первый, второй и третий фотопередатчики 352, 354 и 356 конкретно ориентированы в соответствии с их соответствующими наклонными поверхностями 342, 344 и 346. Таким образом, каждая из первой, второй и третьей центральных осей передачи 362, 364 и 366, проходящих от соответствующих фотопередатчиков, перпендикулярна/нормальна соответствующей одной из наклонных поверхностей 342, 344 и 346. Кроме того, каждая из центральных осей передачи 362, 364 и 366, в целом, смещена на угол α от перпендикулярной оси 350, отходящей перпендикулярно/нормально от верхней поверхности 348. Перпендикулярная ось 350 в настоящем варианте осуществления также перпендикулярна поверхности видеоэкрана 106 и, в целом, всей лицевой поверхности электронного устройства 102, на которой смонтированы узел восприятия 104, видеоэкран 106, кнопочная панель 108 и группа клавиш навигации 110.
Кроме того, согласно фиг. 3, узел восприятия 104 пирамидального типа также включает в себя дополнительное фотоэлектрическое устройство помимо фотопередатчиков 352, 354 и 356 (которые сами являются фотоэлектрическими устройствами), а именно, фотоприемник 360, установленный на верхней поверхности 348 и, в настоящем варианте осуществления, расположен конкретно в центре этой поверхности (например, расположен в центре равнобедренной треугольной поверхности). Фотоприемник 360, который, как отмечено выше, может представлять собой фотодиод или фототранзистор, пригодный для приема инфракрасного света, в частности, расположен так, что его центральная ось приема выровнена с перпендикулярной осью 350. Поэтому, хотя фотопередатчики 352, 354 и 356 ориентированы для излучения света, в целом, вдоль трех центральных осей передачи 362, 364 и 366, фотоприемник 360 ориентирован для приема света, в целом, вдоль перпендикулярной оси 350. Короче говоря, узел восприятия 104 пирамидального типа можно, таким образом, описать как включающий в себя единичный фотоприемник, окруженный по своим сторонам тремя фотопередатчиками, которые одинаково разнесены друг от друга в порядке обхода вокруг фотоприемника, и смещены в отношении их вертикальных поворотных ориентаций от вертикальной поворотной ориентации фотоприемника на одну и ту же угловую величину, причем все эти компоненты заключены в корпус тетраэдрической формы, поверхности которого соответствуют поворотным ориентациям фотопередатчиков и фотоприемника. В других случаях можно использовать как множественные фотопередатчики, так и множественные фотоприемники, например, фотопередатчики, ориентированные, как описано выше, причем один или несколько фотоприемников ориентированы так, чтобы лучше принимать отраженный свет, излучаемый из соответствующего фотопередатчика.
В силу конкретных ориентаций фотопередатчиков 352, 354, 356 и фотоприемника 360, свет от соответствующих фотопередатчиков направляется, в целом, в трех разных направлениях, соответствующих центральным осям передачи 362, 364, 366 (хотя может иметь место некоторое перекрытие диапазонов, в которых соответствующие фотопередатчики направляют свет), тогда как фотоприемник 360, в силу своего центрального положения и ориентации вдоль перпендикулярной оси 350, в принципе, способен принимать отраженный свет с различных направлений, которые могут перекрывать направления передачи каждого из трех фотопередатчиков. В частности, поскольку фотоприемник 360 способен принимать свет из диапазона углов вдоль перпендикулярной оси 350, более широкого, чем диапазоны углов вдоль соответствующих центральных осей передачи 362, 364, 366, в которых соответствующие фотопередатчики способны направлять свет, в настоящем варианте осуществления узел восприятия 104 в целом действует на основе предположения о том, что фотоприемник способен принимать свет, который отражается от объекта, например, руки 111, несмотря на то, что отраженный свет может исходить из любого одного или более из трех фотопередатчиков.
Кроме того, согласно фиг. 3, вышеописанные компоненты узла восприятия 104, могут быть смонтированы непосредственно на печатной плате 368, на которой смонтированы другие компоненты, например, компоненты 369. В силу этого непосредственного монтажа узла восприятия 104, узлу восприятия 104 не свойственно сильно выступать из общей поверхности электронного устройства 102, на которой располагаются видеоэкран 106, кнопочная панель 108 и группа клавиш навигации 110. Согласно варианту осуществления, представленному на фиг. 3, узел восприятия 104 конкретно показан как реализованный вблизи верхнего края лицевой поверхности электронного устройства 102, где часто располагается громкоговоритель мобильного телефона. Однако, как дополнительно рассмотрено ниже, также возможны другие позиции такого узла восприятия.
Согласно фиг. 4, настоящее изобретение призвано охватывать многочисленные другие узлы восприятия пирамидального типа, отличные от показанного на фиг. 3. Например, согласно фиг. 4, применяется узел восприятия 400, имеющий более традиционную форму четырехугольной пирамиды (в отличие от тетраэдрической формы на фиг. 3). В частности, узел восприятия 400 имеет корпусную конструкцию 471 пирамидального типа, четыре ребра которой образуют квадратный периметр 472 и четыре наклонные поверхности 474, 476, 478 и 480. Аналогично узлу восприятия 104, показанному на фиг. 3, корпусная конструкция 471 узла восприятия 400 дополнительно включает в себя верхнюю поверхность 482, от которой каждая из соответствующих четырех наклонных поверхностей 474, 476, 478 и 480 отклоняется вниз. Относительно узла восприятия 104, каждый из фотопередатчиков 484, 486, 488 и 490, например фото-СИД, располагается на соответствующей одной из наклонных поверхностей 474, 476, 478 и 480, и фотоприемник 492, например фотодиод, установлен на верхней поверхности 482. Таким образом, аналогично узлу восприятия 104, узел восприятия 400 включает в себя множественные фотопередатчики, размещенные вокруг (и на равном удалении) единичного фотоприемника, занимающего центральное положение между фотопередатчиками.
Кроме того, согласно фиг. 4, центральная ось приема фотоприемника 492, в свою очередь, выровнена с перпендикулярной осью 493, нормальной к верхней поверхности 482, которая ориентирована под углом β относительно каждой из первой, второй, третьей и четвертой центральных осей передачи 494, 496, 498 и 499 соответствующих фотопередатчиков 484, 486, 488 и 490. В других вариантах осуществления, один или несколько фотопередатчиков могут располагаться так, чтобы их соответствующие углы отличались друг от друга. Таким образом, как и для узла восприятия 104, каждый из соответствующих фотопередатчиков 484, 486, 488, 490 поворотно смещены по вертикали относительно перпендикулярной оси 493 (и, таким образом, относительно центральной оси приема фотоприемника 492) в соответствии с наклонами соответствующих наклонных поверхностей 474, 476, 478, 480, с которыми связаны фотопередатчики. Кроме того, как и узел восприятия 104, фотоприемник 492 способен принимать свет в значительно более широком диапазоне углов относительно перпендикулярной оси 493, чем соответствующие фотопередатчики 484, 486, 488, 490 передают свет относительно их соответствующих центральных осей передачи 494, 496, 498, 499, и работа узла восприятия 400, в свою очередь, осуществляется на основании предположения о том, что фотоприемник 492 способен принимать свет, который отражается от внешнего объекта, который может передаваться одним или несколькими фотопередатчиками 484, 486, 488, 490.
На фиг. 5 показан еще один альтернативный вариант осуществления узла восприятия 500. В этом варианте осуществления, узел восприятия 500 снова имеет корпусную конструкцию пирамидального типа 501 с четырьмя наклонными поверхностями 502, 504, 506 и 508, соответственно, каждая из которых наклонена и отклоняется вниз от горизонтальной верхней поверхности 510. Однако в этом варианте осуществления узел восприятия 500 не применяет фотопередатчики на наклонных поверхностях 502, 504, 506 и 508, но на этих поверхностях установлены первый, второй, третий и четвертый фотоприемники 512, 514, 516 и 518, соответственно. Кроме того, вместо того, чтобы использовать фотоприемник на верхней поверхности 510, на этой поверхности (или, в частности, с заглублением в нее) установлен фотопередатчик 520. Согласно этой конструкции, в отличие от вариантов осуществления, показанных на фиг. 3 и 4, предполагается, что свет, излучаемый из фотопередатчика 520, отразившись от объекта или объектов, внешних по отношению к электронному устройству (например, руки 111), направится в один или несколько фотоприемников 512, 514, 516 и 518.
Хотя это не показано на фиг. 3-5, в некоторых обстоятельствах фотоприемникам 360, 492 и 512, 514, 516, 518 не обязательно доходить до самих внешних поверхностей узлов восприятия/ корпусных конструкций пирамидального типа, но достаточно, чтобы над этими фотоприемниками располагались дополнительные конструкции, например, прозрачные окна или стенки, которые обеспечивают защиту фотоприемников и/или обеспечивают дополнительные нужные оптические свойства. В некоторых таких обстоятельствах, например, такие прозрачные окна могут образовывать волноводы (или “V-образные канавки” или волноводы типа составного параболического концентратора (CPC)) которые призваны улучшать канализацию входящего отраженного света в фотоприемники и/или которые служат в качестве линз для увеличения, повышения коэффициента усиления и/или минимизации локальной связи. В ряде случаев, определенные участки поверхностей, окружающих фотоприемники, можно покрывать краской на основе серебра или меди (или другим блестящим материалом) для отражения инфракрасного света к фотоприемникам. Кроме того, в ряде случаев, сами фотоприемники можно экранировать (например, электрически экранировать) или выполнять в виде “черных диодов” для решения проблем фонового освещения, внутреннего отражения/шума и/или шума от фотопередатчиков узла восприятия. Такого рода признаки могут представлять конкретный интерес в связи, например, с вариантами осуществления, представленными на фиг. 3-4, где предусмотрен единичный фотоприемник.
Кроме того, в зависимости от варианта осуществления, фотоприемники могут принимать различные формы, включающие в себя, например, приемники с угловым разнесением или фасеточные приемники. В зависимости от варианта осуществления, над фотоприемниками и/или фотопередатчиками можно использовать различные фильтры для устранения ненужного света. Различные фильтры в некоторых обстоятельствах можно применять с разными фотопередатчиками/фотоприемниками, например, для обеспечения возможности связывания света разных цветов с различными компонентами, а также его передачи или приема сих помощью.
Варианты осуществления узлов восприятия, показанные на фиг. 3, 4 и 5 аналогичны (несмотря на различия) в том, что множественные фотопередатчики и/или фотоприемники совмещены (то есть, совместно располагаются) в единичный или общей малой области, т.е. в области, которая мала по сравнению с размерами всей поверхности электронного устройства, на которой должны быть смонтированы узлы восприятия. Кроме того, по меньшей мере, в этих вариантах осуществления, также справедливо, что используется либо только один фотоприемник (при наличии множественных фотопередатчиков), либо только один фотопередатчик (при наличии множественных фотоприемников), хотя настоящее изобретение также призвано охватывать другие варианты осуществления, в которых предусмотрены множественные фотопередатчики, а также множественные фотоприемники, которые располагаются в одном месте. Кроме того, как уже упомянуто со ссылкой на фиг. 3, в каждом из этих вариантов осуществления, фотопередатчик(и)/фотоприемник(и) и соответствующие корпусные конструкции пирамидального типа могут (но не обязаны) быть смонтированы на печатной плате совместно с другими схемными компонентами.
Совмещение фотопередатчика(ов)/фотоприемника(ов), установленных в корпусных конструкциях пирамидального типа в соответствии с вариантами осуществления, например, представленными на фиг. 3-5, выгодно в нескольких отношениях. Прежде всего, в силу вышеописанного совмещения фотоприемных и фотопередающих устройств, включающего в себя указанные конкретные ориентации (например, относительно перпендикулярных осей 350, 493), соответствующий узел восприятия получает возможность воспринимать не только присутствие внешнего объекта (то есть обнаруживать тот факт, что объект находится в пределах данного расстояния или вблизи от узла восприятия), но и положение внешнего объекта, например, руки 111 в трехмерном пространстве относительно узла восприятия. Действительно, это можно обеспечивать, несмотря на то, что, в каждом из вариантов осуществления, показанных на фиг. 3-5, существует только один фотопередатчик или только один фотоприемник, что рассмотрено более подробно ниже со ссылкой на фиг. 6. Кроме того, в силу совмещения фотоприемных и фотопередающих устройств вышеописанным образом в корпусных конструкциях пирамидального типа, получаются узлы восприятия более надежной и компактной (а не распределенной) конструкции. Таким образом, узлы восприятия в принципе, могут быть дискретными структурами, которые можно реализовать применительно ко многим разным типам существующих электронных устройств, посредством сравнительно простого процесса установки, в качестве дополнительных устройств или даже запчастей.
Заметим, что конкретные угловые диапазоны, связанные с передачей или приемом света разными фотопередатчиками и фотоприемниками, связанными с узлами восприятия, например, описанными выше, могут варьироваться для разных вариантов осуществления и в зависимости от поставленной задачи. Как отмечено выше, обычно фотоприемники могут иметь диапазон приема (например, от очень широкого диапазона, например, в 60 градусов, до узкого на основании соответствующей интегральной линзовой схемы), который превышает диапазон передачи фотопередатчиков (например, диапазон в 20 градусов). Тем не менее это имеет место не во всех вариантах осуществления. Однако следует также обратить внимание на то, что, предположительно, в конкретных реализациях, варианты осуществления, показанные на фиг. 3 и 4, могут иметь преимущество над показанными на фиг. 5, постольку поскольку, в большинстве случаев угловой диапазон, в пределах которого данный фотоприемник способен принимать свет, значительно превышает угловой диапазон, в пределах которого фотопередатчик способен передавать свет, и поэтому, для того, чтобы различать между собой отраженные световые сигналы, потребуется более сильное отклонение фотоприемников согласно варианту осуществления, показанному на фиг. 5. Кроме того, использование единичного фотоприемника для приема отраженного света, исходящего из множественных фотопередатчиков, согласно вариантам осуществления, представленным на фиг. 3-4, обычно позволяет использовать упрощенную схему восприятия, поскольку приемная схема обычно сложнее передающей схемы.
На фиг. 6 показан вид сбоку электронного устройства 102 и руки 111, изображенных на фиг. 1 (причем рука вновь изображена частично), для дополнительной иллюстрации, как узел восприятия 104 со своими совмещенными фотопередатчиками и единичным фотоприемником способен обнаруживать присутствие и положение руки (или ее части, например, пальца). Показано, что, когда рука 111 присутствует и располагается достаточно близко к узу восприятия 104, довольно часто (если не всегда) рука оказывается в положении, находящемся в диапазоне передачи света, по меньшей мере, двух, если не всех трех, фотопередатчиков 352, 354 и 356 узла восприятия 104. Поэтому, в данном примере, при передаче света от более, чем одного из фотопередатчиков, например, фотопередатчиков 352 и 354, как показано, свет 672 и 674, излученный соответствующими фотопередатчиками, достигает руки под углом и отражается от руки, генерируя соответствующие количества отраженного света 676 и 678, соответственно. При условии, что фотоприемник 360 располагается между фотопередатчиками 352, 354, оба эти количества отраженного света 676, 678 достигают фотоприемника и воспринимаются фотоприемником, что показано на фигуре.
На фиг. 7 представлена логическая блок-схема, более подробно демонстрирующая один иллюстративный режим работы компонентов узла восприятия 104 для определения положения внешнего объекта (например, руки 111), в котором управление каждым из фотопередатчиков осуществляется так, чтобы он излучал свет в течение каждого из одного или нескольких последовательных периодов времени. В частности, согласно фиг. 7, после начала работы на этапе 780, первый из фотопередатчиков узла восприятия 104 (например, фотопередатчик 352) выбирается на этапе 782. Затем, на этапе 784, выбранный фотопередатчик активируется для излучения инфракрасного света из этого фотопередатчика. Затем этот свет направляется к внешнему объекту (например, в качестве излученного света 672 на фиг. 6) и, по достижении внешнего объекта, некоторая часть этого света отражается внешним объектом (например, в качестве отраженного света 676). На этапе 786 этот отраженный свет, в свою очередь, принимается фотоприемником (например, фотоприемником 360), и фотоприемник соответственно передает на устройство обработки (и/или запоминающее устройство), сигнал, несущий принятую информацию. На этапе 788 дополнительно производится определение, все ли фотопередатчики активированы. Если нет, то на этапе 790 выбирается еще один из оставшихся фотопередатчиков (например, фотопередатчик 354), после чего этапы 784, 786 и 788 повторяются (например, таким образом, что излученный свет 674 передается, и отраженный свет 678 принимается фотоприемником). Если же на этапе 788 определено, что все фотопередатчики активированы, и, следовательно, фотоприемник принял отраженные световые сигналы, связанные со светом, излученным каждым из этих фотопередатчиков в течение соответствующего периода времени, то на этапе 792 информация от фотоприемника обрабатывается для определения положения внешнего объекта в трехмерном пространстве.
Сигнальную информацию от фотоприемника можно обрабатывать для определения положения внешнего объекта следующим образом. Иллюстративный режим работы, описанный на фиг. 7, по существу, соответствует мультиплексированию с временным разделением, при котором различные фотопередатчики включаются и выключаются по одному в последовательном режиме, в связи с чем, образуются последовательные временные окна или соответствующие участки каждого периода времени, связанные с активацией разных фотопередатчиков. Исходя из того, что воспринимаемый внешний объект располагается сравнительно близко к передатчикам и фотоприемнику, эти последовательные временные окна не только образуют соответствующие окна, в которых активируются разные фотопередатчики, но также образуют соответствующие окна, в которых свет, испускаемый соответствующими фотопередатчиками, излучается, отражается от внешнего объекта и принимается на фотоприемнике. Таким образом, сигналы, обеспечиваемые фотоприемником, которые указывают интенсивность/количество света, принимаемого фотоприемником в течение любого данного временного окна, можно сравнивать с интенсивностью/количеством света, выдаваемого фотопередатчиком, в отношении которого известно, что он излучал свет в течение этого временного окна, и такие сравнения позволяют определять долю света, излучаемого данным фотопередатчиком, которая фактически возвращается на фотоприемник вследствие отражения от внешнего объекта. Такие измерения, в свою очередь, служат указателями близости внешнего объекта к соответствующим фотопередатчикам и фотоприемнику, между которыми распространяется свет.
Таким образом, согласно фиг. 7, управление фотопередатчиками осуществляется таким образом, что каждый из них излучает свет в течение соответствующего, неперекрывающегося участка каждого из одного или нескольких периодов времени, и фотоприемник обнаруживает измеренные сигналы, каждый из которых может быть связан с соответствующим одним из фотопередатчиков на основании хронирования. Однако в других случаях, фотопередатчики могут излучать свет на разных частотах (длинах волны) или полосах и, возможно, разных цветов, что позволяет управлять фотопередатчиками так, чтобы каждый из них излучал свет в одно и то же время в течение каждого из одного или нескольких последовательных периодов времени. В этом случае, схему приемника можно обеспечить с возможностью электронной фильтрации измеренных сигналов по частоте, что позволяет связывать каждый измеренный сигнал с соответствующим одним из фотопередатчиков. Другой способ дифференциации измеренных сигналов, когда узел восприятия использует свет разных цветов, излучаемый фотопередатчиками, предусматривает использование оптического фильтра, позволяющего разделять свет разных длин волны, с использованием соответствующим образом настроенного фотоприемника для каждого цвета.
В любом случае, для повышения точности таких измерений, в частности, можно учитывать определенную дополнительную информацию или, по меньшей мере, делать один или несколько предположений. Например, точность таких измерений особенно повышается в качестве указания близости, при наличии правильного предположения относительно физической отражательной способности внешнего объекта, чего-то, что на практике обычно можно довести до достаточно высокой степени. Дополнительные соображения, которые следует принимать во внимание, могут включать в себя текстуру поверхности, размер, форму, консистенцию, материал, ориентацию/направление объекта. Прогнозирование абсолютных уровней отражательной способности в таких условиях может представлять трудность и может требовать процедуры калибровки. Кроме того, может оказаться желательным пользоваться другими технологиями, которые, по природе своей, менее подвержены вышеозначенным факторам (например, восприятия ультразвука) для более точного измерения дальности до объекта, и возвращать эту информацию на процессор для оптимизации производительности узла восприятия и повышения возможностей слежения. Дополнительно, физические позиции/ориентации фотопередатчиков и фотоприемников также влияют на измерения и подлежат учету. Кроме того, необходимо учитывать изменения угловых параметров передачи и приема фотопередатчиков и фотоприемник. В этой связи, как было рассмотрено выше, каждый из фотопередатчиков имеет соответствующую центральную ось передачи, и фотоприемник аналогично имеет соответствующую центральную ось приема. Интенсивность передачи от фотопередатчиков изменяется (обычно убывает) с увеличением угла между этой центральной осью передачи и фактическим направлением передачи, и, аналогично, приемная способность фотоприемника также изменяется (обычно убывает) с увеличением угла между центральной осью приема и фактическим направлением приема. Обычно предельные изменения этих величин при отклонении от центральных осей передачи или приема являются известными параметрами, связанными с фотопередатчиками и фотоприемниками.
Исходя из того, что устройство обработки имеет все эти типы информации или, по меньшей мере, может опираться на разумные допущения, касающиеся этих вопросов, устройство обработки, принимающее сигналы от фотоприемника (например, процессор 204, показанный на фиг. 2, который также может управлять активацией фотопередатчиков), не только способно определять расстояние от внешнего объекта до инфракрасного узла восприятия, но, в частности, также способно определять трехмерное положение внешнего объекта путем разновидности триангуляционного вычисления (или вычислений). В частности, после получения устройством обработки множественных уровней амплитуды (интенсивности), наличие которых указано фотоприемником в течение разных временных окон, в течение которых множественные фотопередатчики были соответственно активированы для передачи света, устройство обработки может не только определить количество/интенсивность инфракрасного света, исходящего из каждого фотопередатчика, который отражается обратно к фотоприемнику, но также может сравнить относительные количества/интенсивности инфракрасного света, излучаемого разными фотопередатчиками, который также отражается обратно к фотоприемнику, для определения положения внешнего объекта относительно инфракрасного узла восприятия. В общем, поскольку количества/интенсивности инфракрасного света, отраженного обратно к фотоприемнику, обычно отличаются друг от друга в зависимости от фотопередатчика, от которого исходит инфракрасный свет, это позволяет указывать, что внешний объект сдвинулся к той или другой стороне инфракрасного узла восприятия.
Например, если внешний объект находится непосредственно перед узлом восприятия 104, как показано на фиг. 3, то интенсивность света, принимаемого фотоприемником 360, будет приблизительно одинаковой независимо от того, какой из фотопередатчиков (например, какой из фотопередатчиков 352, 354, 356) активирован (хотя на таком близком расстоянии отраженные сигналы сильны и обычно доводят приемник до насыщения). Соответственно, если сигналы, принимаемые от фотоприемника 360, одинаковы или почти одинаковы в течение каждого из трех последовательных временных окон, в течение которых последовательно активируются три фотопередатчика, то обработка этой информации определит, что внешний объект находится перед узлом восприятия 104. Напротив, если принятый световой сигнал, обеспечиваемый фотоприемником 360 в течение временного окна, соответствующего активации фотопередатчика 352, значительно выше, чем принятый световой сигнал, обеспечиваемый фотоприемником в течение временного окна, соответствующего активации фотопередатчиков 354 и 356, то обработка этой информации определит, что внешний объект находится сбоку от узла восприятия 104, ближе к фотопередатчику 352, чем к любому из двух других фотопередатчиков.
Хотя вышеприведенное описание определения положения внешнего объекта посредством триангуляции, в частности, предусматривает использование информации, касающейся света, принимаемого на единичном фотоприемнике от множественных фотопередатчиков (например, как в случае вариантов осуществления инфракрасных узлов восприятия, показанных на фиг. 3 и 4), аналогичный процесс в равной степени применим к случаю использования множественных фотоприемников для приема множественных различных компонентов отраженного света от единичного фотопередатчика (например, как в случае варианта осуществления, показанного на фиг. 5). Во всех этих вариантах осуществления, при получении множественных выборок отраженного света в течение последовательности временных окон, обычно предполагается, что временные окна являются достаточно короткими, что делает маловероятным значительное перемещение внешнего объекта в течение всего промежутка времени, охватывающего все временные окна, представляющие интерес. Кроме того, хотя может быть так, что выборка в течение единичного набора временных окон (например, в течение которого происходит только один набор фотоэмиссий, причем каждый фотопередатчик активируется только один раз) является адекватной для определения положения внешнего объекта, также существует возможность того, что множественные повторяющиеся выборки отраженного света будут получены и использованы для определения положения внешнего объекта (например, когда устройство обработки не только учитывает множественные взятия выборок принятого света, происходящие, когда каждый из фотопередатчиков последовательно активируется в течение последовательных временных окон, но также учитывает дополнительные взятия выборок принятого света, когда фотопередатчики последовательно активируются неоднократно).
Наконец, помимо вышеприведенного общего описания использования информации отраженного света для определения положения внешних объектов, очевидно, что другие дополнительные или альтернативные этапы обработки также можно применять для определения или более точной оценки положения объектов. Например, в некоторых обстоятельствах, желательно производить определения фонового света до осуществления измерений интенсивности отраженного света (например, до или между последовательными временными окнами, как рассмотрено выше), что позволяет устройству обработки оценивать и учитывать фоновый шум в своих вычислениях, и/или позволяет устройство обработки регулировать рабочие параметры фотопередатчиков и/или фотоприемников, например, коэффициент усиления и т.д. В этой связи, например, можно обратиться к содержанию патентной заявки США № 12/344,760 поданной 29 декабря 2008 г. и озаглавленной “Portable Electronic Device Having Self-Calibrating Proximity Sensors” и патентной заявки США № 12/347,146 поданной 31 декабря 2008 г. и озаглавленной “Portable Electronic Device Having Directional Proximity Sensors Based on Device Orientation”, каждая из которых, таким образом, включена сюда в порядке ссылки и каждая из которых принадлежит тому же правообладателю, что и настоящая заявка.
Также следует заметить, что, по меньшей мере, в некоторых вариантах осуществления, работа узла восприятия может ограничиваться рассмотрением отраженного света, исходящего только из определенного(ых) подмножеств() имеющихся фотопередатчиков. В некоторых таких вариантах осуществления, где узел восприятия реализован в виде сотового телефона или КПК, слежение за рукой/смещение жестикуляции в сторону над электронным устройством обеспечивается за счет исключения из инфракрасного слежения любых сигналов, исходящих из фотопередатчиков на стороне узла восприятия, которая заслонена в результате смещения позиции. Например, в связи с вариантом осуществления, представленным на фиг. 4, отраженный свет, исходящий из одного из фотопередатчиков на заслоненной стороне узла восприятия, не будет рассматриваться при определении присутствия/положения внешнего объекта (или, возможно, этот фотопередатчик не будет активирован для излучения света). Это обеспечивает работоспособность, поскольку, если пользователь-человек помещает руку над сенсорным экраном и смещает ее вправо, так что рука не заслоняет обзор сенсорного экрана, отражение от левостороннего СИД узла восприятия почти отсутствует (обращено от и напротив положения руки), и три другие СИД используются для слежения за рукой и наоборот (что позволяет отслеживать руку, располагая руку в стороне).
Согласно фиг. 8 и 9, расположение узла восприятия, например, узлов восприятия 104, 400 и 500, показанных на фиг. 3-6, может разниться в зависимости от варианта осуществления и/или электронного устройства. Например, согласно фиг. 8, узел восприятия, например, узел восприятия 400 может располагаться в середине лицевой поверхности электронного устройства, например, электронного устройства 800. В некоторых таких вариантах осуществления, узел восприятия 400 может заменять группу клавиш навигации, в связи с чем, корпусная конструкция пирамидального типа узла восприятия не только служит для вмещения фотопередатчика(ов)/фотоприемника(ов), но также служит в качестве кнопки/рычажка, которую/ый можно нажимать и/или отклонять/вращать относительно лицевой поверхности электронного устройства, тем самым обеспечивая управление без помощи рук и/или посредством касания.
Кроме того, помимо варианта осуществления, представленного на фиг. 1 и 6, узел восприятия можно реализовать на любом конце или на любом краю любого данного электронного устройства в зависимости от варианта осуществления. Например, согласно фиг. 9, узел восприятия 104, 400, 500, например, показанный на фиг. 3-5 можно реализовать на противоположном конце электронного устройства (например, близи нижней границы лицевой поверхности) 900, а не на конце, как показано на фиг. 1 и 6 (например, вблизи лицевой поверхности). Электронное устройство 900 также призвано демонстрировать, каким образом узел восприятия, например, любой из описанных выше, можно реализовать на электронном устройстве, в котором всю лицевую поверхность занимает стеклянный или пластмассовый/прозрачный видеоэкран или сенсорный экран. Заметим, что проблемы заграждения наподобие рассмотренных выше (например, связанных с размещением руки) обычно не возникают, когда узел восприятия находится в нижней части сенсорного экрана, как показано на фиг. 9, хотя в таких вариантах осуществления может понадобиться немного наклонять узел восприятия к точке, расположенной ближе к центру телефона (или использовать линзу для достижения такого эффекта).
Хотя все вышеописанные варианты осуществления предусматривают реализацию одного или нескольких фотоприемников и фотопередатчиков на разных стенках (или утопленными в них) конструкции пирамидального типа, причем соответствующие ориентации этих фотоприемников/фотопередатчиков соответствуют ориентациям соответствующих поверхностей конструкции пирамидального типа, в которой реализованы эти устройства, настоящее изобретение также призвано охватывать многочисленные дополнительные варианты осуществления, в определенных аспектах отличающиеся от вышеописанных. Например, по меньшей мере, в некоторых вариантах осуществления, фотоприемник(и)/фотопередатчик(и), хотя и располагаются рядом друг с другом, благодаря чему, различные устройства поддерживают относительные угловые позиции, которые идентичны (или аналогичны) описанным выше, они, тем не менее, не заключены ни в какую конкретную корпусную конструкцию пирамидального типа с конкретными стенками, как описано выше. Действительно, настоящее изобретение призвано охватывать варианты осуществления, в которых присутствует лишь несколько фотоприемников/фотопередатчиков, которые объединены друг с другом, но в отсутствие каких-либо стенок или конструкций между этими устройствами.
Кроме того, вышеописанные варианты осуществления, в частности, предусматривают реализацию множественных (например, трех или более) устройств одного типа (например, фотопередатчиков или фотоприемников), окружающих единичное устройство другого типа (например, фотоприемник или фотопередатчик), причем устройства одного типа одинаково разнесены друг от друга вокруг устройства другого типа, причем устройства одного типа находятся на одинаковом расстоянии от устройства другого типа, и при этом устройства одного типа имеют угловое смещение в своей ориентации относительно ориентации устройства другого типа на постоянную угловую величину (например, на угол α или β), возможны также другие варианты осуществления. Например, в некоторых альтернативных вариантах осуществления, устройства одного типа не обязаны быть одинаково разнесенными друг от друга вокруг устройства другого типа, не обязаны находиться на одинаковых расстояниях от устройства другого типа и/или не обязаны иметь смещение в своей ориентации относительно этого другого устройства на одну и ту же величину.
В этой связи, один иллюстративный альтернативный вариант осуществления узла восприятия 1000 представлен на фиг. 10. Как показано, в этом варианте осуществления, узел восприятия 1000, наподобие узла восприятия 400, показанного на фиг. 4, имеет четыре фотопередатчика 1002, разнесенные вокруг единичного фотоприемника 354. Однако, в отличие от узла восприятия 400, все фотопередатчики 1002 ориентированы вертикально, так что центральные оси передачи параллельны центральной оси приема фотоприемника 354. Таким образом, фотопередатчики 1002 не имеют смещения в своей поворотной ориентации относительно фотоприемника. Кроме того, корпус 1006, служащий опорой для фотопередатчиков 1002 и фотоприемника 1004, не обязан иметь пирамидальную форму с какими-либо наклонными поверхностями.
Несмотря на эти различия между узлом восприятия 1000 и узлом восприятия 400, узел восприятия 1000, тем не менее, способен передавать свет и принимать отраженный свет (отраженный внешним объектом), как если бы фотопередатчики были поворотно смещены относительно фотоприемника, постольку, поскольку узел восприятия 1000 дополнительно включает в себя линзу или призму 1008 пирамидальной формы (или, возможно, множественные линзы в пирамидальной форме), обеспеченную поверх фотопередатчиков и фотоприемника (или возможно, поверх только одного или нескольких из этих устройств), которая преломляет/отклоняет передаваемый свет, выходящий из узла восприятия/линзы и/или преломляет/отклоняет принятый свет, падающий на узел восприятия/линзу, благодаря чему, в целом, передача и прием света из узла восприятия и в него происходит, по существу, таким же образом, как для узла восприятия 400. В некоторых обстоятельствах, линза 1008 может представлять собой микропленку для искривления пучка, в особенности, если предусмотренные углы малы (например, от 10 до 5 градусов), и фото-СИД имеют сравнительно узкие диапазоны передачи (например, плюс или минус 30 градусов). Хотя показано, что линза 1008 имеет форму пирамидального типа, которая включает в себя четыре наклонные стороны, отходящие от вершины линзы (в этом случае, эту вершину можно считать центральной поверхностью линзы), в других вариантах осуществления, линза может принимать форму, более аналогичную форме конструкций пирамидального типа, описанных выше в связи с фиг. 3-5, где вершинная часть пирамиды отсутствует, благодаря чему, существует более протяженная центральная поверхность (например, например, верхние поверхности 348, 482 и 510), от которой отходят наклонные поверхности.
Настоящее изобретение также призвано охватывать дополнительные варианты осуществления узлов восприятия, реализовать которые особенно полезно в определенных типах электронных устройств. В частности, на фиг. 11 показан дополнительный узел восприятия 1100, реализованный применительно к стеклянному (или выполненному из прозрачного пластика) видеоэкрану или сенсорному экрану 1102, который обычно входит в состав определенных типов электронных устройств, включая, например, электронное устройство 900, показанное на фиг. 9. Согласно варианту осуществления, представленному на фиг. 11, узел восприятия 1100 включает в себя четыре приемопередатчика 1104, каждый из которых включает в себя соответствующий фотопередатчик и соответствующий фотоприемник, и соответствующие приемопередатчики располагаются, соответственно, в средних точках каждый из четырех боковых сторон экрана 1102, соответственно. Кроме того, показано, что узел восприятия 1100 также включает в себя образование 1114 пирамидального типа, входящее в состав экрана 1102 (или расположенное непосредственно под ним). Образование 1114 пирамидального типа включает в себя четыре наклонные поверхности 1108, отходящие от четырех сторон квадратной верхней (горизонтальной) поверхности 1106, причем каждая наклонная поверхность отклонена вниз от верхней поверхности к одному из соответствующих краев экрана 1102.
Узел восприятия 1100, показанный на фиг. 11, работает следующим образом. В первом режиме работы, свет передается от каждого из фотопередатчиков соответствующих приемопередатчиков 1104 по соответствующим оптическим волноводам 1110 через экран 1102 (или непосредственно под экраном, параллельно его поверхности) к соответствующей одной из наклонных поверхностей 1108, ближайшей к поверхности соответствующего приемопередатчика. Достигнув наклонных поверхностей, свет отражается наружу из узла восприятия 1100 (и, таким образом, из электронного устройства, на котором он реализован) под различными углами в зависимости от наклонов наклонных поверхностей 1108, причем передача света сосредоточена вокруг соответствующих центральных осей передачи 1112. Таким образом, передаваемый свет излучается из узла восприятия 1100, по существу, таким же образом, как если бы свет излучался непосредственно из фотопередатчиков, размещенных на сторонах конструкции пирамидального типа, показанной на фиг. 4. После излучения света вдоль центральных осей передачи 1112, он может отражаться от внешнего объекта, например, руки 111, показанной на фиг. 1. Часть отраженного света, в итоге, принимается одним или несколькими фотоприемниками, связанными с соответствующими приемопередатчиками 1104, и, таким образом, отраженный свет воспринимается.
Возможны также другие модификации узла восприятия 1100. Например, в одном альтернативном варианте осуществления, вместо передачи отраженного света из узла восприятия, наклонные поверхности 1108 образования 1114 пирамидального типа призваны отражать входящий отраженный свет обратно на приемопередатчики 1104, где находятся соответствующие фотоприемники. В таких вариантах осуществления, фотопередатчики приемопередатчиков 1104 можно приспособить для передачи света непосредственно наружу (например, перпендикулярно поверхности экрана 1102) в местах расположения приемопередатчиков, причем этот свет, в свою очередь, частично или полностью отражается внешним объектом обратно к образованию 1114 пирамидального типа. В других альтернативных вариантах осуществления, вместо применения четырех приемопередатчиков, каждый из которых имеет соответствующий фотопередатчик и соответствующий фотоприемник, в положениях приемопередатчиков 1104, показанных на фиг. 11, предусмотрены только четыре фотопередатчика или четыре фотоприемника. В таких вариантах осуществления, когда на краях экрана 1102 располагаются четыре фотопередатчика, на верхней поверхности образования пирамидального типа может располагаться фотоприемник, и, когда на краях экрана располагаются четыре фотоприемника, на верхней поверхности образования пирамидального типа может располагаться фотопередатчик.
Каждый из вариантов осуществления, описанных выше со ссылкой на фиг. 11, обеспечивает конкретные преимущества, поскольку предусматривает использование образования пирамидального типа, например, образования 1114 пирамидального типа, высота которого значительно меньше высот образований пирамидального типа вышеописанных узлов восприятия 104, 400, 500. Таким образом, нет необходимости (или необходимо в меньшей степени), чтобы корпусная конструкция выступала за пределы поверхности электронного устройства. Кроме того, образование 1114 пирамидального типа может быть прозрачным, и, таким образом, выглядеть, по существу, так же, как остальная часть экрана 1102. Таким образом, использование таких образований пирамидального типа, например, образования 1114 может обеспечивать конкретные преимущества для использования в электронных устройствах, причем желательно, чтобы лицевая поверхность устройства представляла собой большой плоский видеоэкран или сенсорный экран, лишенный выступов или участков, причем видеоэкран или сенсорный экран не способен отображать информацию.
В отношении вариантов осуществления узла восприятия, показанных на фиг. 10-11, следует отметить, что, хотя применяемые конструкции несколько отличаются от показанных на фиг. 1-6, каждый из этих вариантов осуществления, тем не менее, может действовать, по существу, таким же образом, как описано со ссылкой на фиг. 7. Кроме того, хотя линза 1008, показанная на фиг. 10, и образование 1114 пирамидального типа, показанное на фиг. 11, являются конструкциями в виде четырехгранной пирамиды, в других вариантах осуществления также можно применять другие конструкции пирамидального типа (например, тетраэдрические конструкции). В ряде случаев, пирамидальная конструкция не требуется, поскольку фотопередатчики и/или фотоприемники могут быть надлежащим образом наклонены, чтобы свет излучался в нужных направлениях.
Помимо рассмотренного выше, настоящее изобретение призвано охватывать многочисленные другие варианты осуществления. Например, в некоторых других вариантах осуществления, предусмотрены только два фотопередатчика (и один или несколько фотоприемников) или только два фотоприемника (и один или несколько фотопередатчиков). В других вариантах осуществления, предусмотрено более четырех фотопередатчиков (и один или несколько фотоприемников) или более четырех фотоприемников (и один или несколько фотопередатчиков). Кроме того, хотя во многих вариантах осуществления настоящего изобретения предусмотрен фиксированный/постоянный монтаж узла восприятия на электронное устройство, что может обеспечивать преимущество, поскольку такого рода монтаж легко осуществлять без необходимости в многих сложных компонентов, в некоторых других вариантах осуществления допустим монтаж узла восприятия на электронное устройство с возможностью отклонения, поворота или параллельного переноса для обеспечения отклонения, поворота и/или параллельного переноса узла восприятия относительно остального электронного устройства (обычно, такие отклонение, поворот и/или параллельный перенос имеют соответствующие ограничения, например, рассмотренные выше в примере, где узел восприятия заменяет группу клавиш навигации). Дополнительно, хотя в некоторых вариантах осуществления, рассмотренных выше, например, со ссылкой на фиг. 3 и 4, фотоприемник (фотодиод) располагается внутри конструкции пирамидального типа (например, в центре конструкции), в альтернативных вариантах осуществления фотоприемник (фотодиод) может располагаться поверх или вне конструкции пирамидального типа или ее центра.
Кроме того, хотя рассмотренные выше варианты осуществления предусматривают единичный инфракрасный узел восприятия, реализованный на данном электронном устройстве, в некоторых других вариантах осуществления также возможно, что на данном электронном устройстве будут реализованы множественные инфракрасные узлы восприятия. Например, в некоторых вариантах осуществления электронных устройств, можно использовать два узла восприятия, расположенные на диаметрально противоположных внешних поверхностях электронного устройства, что позволяет обнаруживать присутствие и положение внешних объектов по обе стороны электронного устройства. Дополнительно, хотя выше описаны конкретные конструкции в форме тетраэдра и четырехсторонней пирамиды, следует понимать, что настоящее изобретение также охватывает другие варианты осуществления, использующие аналогичные конструкции, имеющие множественные наклонные поверхности и т.п. Кроме того, хотя использование линзовой/пирамидальной конструкции для отклонения/преломления света рассмотрено выше в отношении определенных вариантов осуществления, отклонения/преломления света также можно добиться с помощью оптического диода, размещенного в наклонном модуле или имеющего присоединенную к нему наклонную линзу (действительно, в некоторых обстоятельствах инфракрасный фото-СИД или фотодиод для использования в качестве фотопередатчика или фотоприемника будет изготавливаться производителем с такими наклонными характеристиками, которые можно именовать, например, “верхний желоб”, “боковой желоб” или “наклонный желоб”, помимо прочего).
Кроме того, хотя в рассмотренных выше вариантах осуществления предполагается, что узел восприятия реализован совместно с электронным устройством или другим устройством, причем электронное устройство или другое устройство включает в себя процессор и/или другие компоненты, необходимые для управления активацией фотопередатчика(ов) узла восприятия, для приема сигналов, указывающих прием отраженного света фотоприемником(ами), и для определения присутствия и положения внешнего(их) объекта(ов) на основании этих принятых сигналов, в других вариантах осуществления возможно, что узел восприятия сам включает в себя процессор и/или другие необходимые компоненты (например, запоминающее(ие) устройство(а), устройство(а) аккумулятора/источника питания, и входные/выходные разъемы и т.д.), позволяющие узлу восприятия самостоятельно работать в отношении управления активацией своего(их) фотопередатчика(ов), мониторинга работы своего(их) фотоприемника(ов), осуществления определений присутствия/положения и передачи такой информации присутствия/положения на другие внешние устройства. В некоторых таких вариантах осуществления, узел восприятия сам по себе имеет один или несколько разъемов/портов/интерфейсов, позволяющих узлу восприятия осуществлять связь с удаленными устройствами по проводным или беспроводным сетям, в том числе, по сетям типа интернета.
Варианты осуществления настоящего изобретения позволяют электронному устройству, с помощью надлежащего узла восприятия, достигать преимуществ в работе на основании полученной информации, относительно присутствия и положения внешнего(их) объекта(ов). Например, в некоторых электронных устройствах, например, сотовых телефонах, присутствие и положение телефона пользователя-человека представляет интерес и можно использовать для управления одной или несколькими операциями телефона или оказания влияния на них. Прежде всего, использование узла восприятия, например, описанного выше, позволяет мобильному телефону обнаруживать, находится ли рука или ухо пользователя-человека вблизи правой стороны телефона или левой стороны телефона, и, таким образом, позволяет надлежащим образом регулировать работу телефона. Кроме того, например, громкость громкоговорителя телефона можно автоматически регулировать на основании воспринятой позиции головы пользователя-человека. Узлы восприятия, например, описанные выше, также позволяют следить за перемещением без заграждения при помещении/перемещении руки над телефоном к левой или правой стороне телефона.
Кроме того, например, использование узла восприятия, например, одного или нескольких из рассмотренных выше, позволяет электронному устройству воспринимать и распознавать жесты руки, указывающие выборы или команды пользователя. Кроме того, например, в этой связи, воспринимаемое перемещение пальца пользователя-человека над лицевой поверхностью электронного устройства может указывать команду пользователя-человека на приостановку отображения изображения или контента на электронном устройстве (например, для облегчения отправки или обобществления изображения/контента), изменение изображения или контента, выбор/отмену выбора изображения или контента (например, для перевертывания страницы информации для отображения другой страницы информации), обобществление изображения или контента и т.д., или на перемещение курсора, отображаемого на экране (например, команду, которая часто обеспечивается “мышью”), или изменение уровня масштабирования или настроек панорамирования изображения (например, карты или фотографии). Таким образом, такое инфракрасное восприятие жестикуляции позволяет заменить сенсорный экран, избавляя пользователя от необходимости фактически касаться поверхности электронного устройства для выполнения команды (хотя система по-прежнему может быть реализована с возможностью также распознавать команды при осуществлении касания). Благодаря избавлению от необходимости касаться экрана, можно уменьшить недостатки, присущие сенсорным датчикам (например, оставление отпечатков пальцев и других следов на экране видеодисплея или перенос инфекции).
В некоторых обстоятельствах, различные перемещения руки или повторяющиеся перемещения руки, воспринимаемые посредством узла восприятия электронного устройства можно понимать как составляющие первую команду, выбора конкретной переменной рабочей характеристики (например, в результате которой на видеоэкране электронного устройства появляется пиктограмма регулировки громкости), сопровождаемую второй командой, изменения настройки переменной рабочей характеристики (например, установления громкости на конкретный уровень). В частности, в этой связи, например, поскольку инфракрасные узлы восприятия вышеописанного типа способны обнаруживать как перемещения по узлам (например, перемещения в горизонтальной плоскости xy), так и перемещения к узлам или от них (например, перемещения по вертикальной оси z), жест в горизонтальной плоскости может сопровождаться жестом по вертикальной оси в качестве указания конкретных команд. Кроме того, например, при использовании таких жестов, горизонтальный жест может вызывать появление пиктограммы регулятора громкости (или масштаба), тогда как вертикальный жест может фактически обуславливать регулировку громкости (или масштаба) до нужного уровня. Альтернативно, когда предусмотрены множественные повторяющие перемещения руки, неудача при осуществлении второго или последующего перемещения руки может интерпретироваться как команда на выполнение какого-то другого действия (например, повторного центрирования или иного изменения положения курсора или изображения).
Ниже приведен один пример работы, охватывающий ряд вышеописанных соображений. Предположим, пользователь поместил руку приблизительно в шести дюймах над сенсорным экраном и по правую сторону от сотового телефона, на котором обеспечен инфракрасный узел восприятия. В тот же момент, телефон может отреагировать, располагая курсор на правом краю сенсорного экрана в соответствии с положением руки. Однако, исходя из того, что рука пользователя оставалась неподвижной в этом положении в течение одной секунды, телефон может совершить дополнительно действие, перемещая курсор в середину сенсорного экрана (в соответствии с положением руки вблизи правой стороны телефона). Как рассмотрено выше, с учетом расположения руки по правую сторону от телефона, телефон может следить за рукой с использованием узла восприятия, с учетом лишь определенных частей отраженного света (например, генерируемых определенными фотопередатчиками, например, тремя из четырех фотопередатчиков узла восприятия, показанного на фиг. 4, но не фотопередатчиком, ориентированным к левой стороне телефона). По завершении пользователем нужной ему операции (например, панорамирования или масштабирования), рука пользователя может снова оставаться неподвижной, и это может указывать на необходимость приостановки текущего изображения.
В некоторых вариантах осуществления работа других существующих датчиков электронного устройства (например, акселерометра, способного обнаруживать физическое нажатие группы клавиш навигации) может координироваться с работой инфракрасного узла восприятия, например, описанной выше. Действительно, в зависимости от варианта осуществления, можно использовать различные другие датчики, помимо инфракрасного узла восприятия, при выявлении команд в навигационном режиме работы и/или соответственно регулировать инфракрасный диапазон при переключении между режимом работы инфракрасной восприятия и режимом работы тактильной восприятия. Например, в некоторых вариантах осуществления, в которых узел восприятия реализован в виде группы клавиш навигации, навигацию можно осуществлять, производя жест рукой над узлом восприятия (не касаясь узла восприятия), сопровождаемый нажатием центрального элемента навигационного устройства для указания выбора. В таком случае, инфракрасный прием будет изменяться от максимального уровня (когда палец находится вблизи узла восприятия) до минимального уровня (когда палец полностью блокирует прием), и такое образование максимума и минимума будет интерпретироваться как ввод выбора. Альтернативно, например, нажатие, воспринимаемое другим датчиком, может предупреждать электронное устройство о предстоящей команде пользователя, которая будет восприниматься инфракрасным узлом восприятия. Кроме того, в некоторых обстоятельствах, скольжение внешнего объекта, например пальца, непосредственно вдоль узла восприятия (предусматривающее касание) может распознаваться как команда.
Электронные устройства, где реализованы узлы восприятия, например описанные выше, можно использовать и в других контекстах. Например, электронное устройство, где реализован узел восприятия, может работать в режиме распознавания близости поверхности (например, в настольном варианте) к электронному устройству, благодаря чему электронное устройство, находящееся или перемещающееся над поверхностью, можно использовать в качестве мыши. В связи с этим, восприятие расположения/отклонения руки пользователя-человека относительно инфракрасного узла восприятия на электронном устройстве, также позволяет вводить в электронное устройство команды, подобные командам мыши. В таких приложениях особенно желательно использовать фотопередатчики с узкими угловыми диапазонами передачи для обеспечения высокой чувствительности при обнаружении отклонения руки пользователя.
Кроме того, в некоторых вариантах осуществления, работой самого узла восприятия можно управлять на основании воспринимаемой информации, касающейся положения внешнего(их) объекта(ов). Например, в ряде случаев, частоту дискретизации (например, в смысле частоты, с которой различные фотопередатчики узла восприятия, например, узла восприятия 104, активируются для излучения света) можно изменять в зависимости от близости пользователя, чтобы регулировать чувствительность обнаружения положение на основании близости пользователя. Действительно, хотя порядок работы, описанный со ссылкой на фиг. 7, предусматривает, что разные фотопередатчики данного узла восприятия будут активироваться последовательно, а не одновременно, в ряде случаев желательно активировать все фотопередатчики одновременно для повышения общей интенсивности света, излучаемого узлом восприятия, что может увеличивать полное количество отраженного света, распространяющегося обратно к фотоприемнику, и, таким образом, давать возможность воспринимать близость внешнего объекта, даже если объект находится на довольно большом расстоянии от узла восприятия. Например, дальность обнаружения близости узла восприятия можно увеличить от шести дюймов в случае последовательной активации фотопередатчиков до двух футов в случае одновременной активации всех фотопередатчиков (это можно называть “сверхдальним обнаружением близости”).
В частности, в связи с обнаружением жестов, узел восприятия, например, узел восприятия 104, 400 или 500, совместно с процессором, например, процессором 204, можно использовать для обнаружения одного или нескольких различных основных жестов, причем каждый жест представляет собой заранее заданный перемещение внешнего объекта (например, руки пользователя или большого или другого пальца) относительно электронного устройства, и для управления работой электронного устройства на основании обнаруженного жеста. Работа электронного устройства также может базироваться на определении положения объекта в различные моменты времени в ходе выполнения жеста. Узел восприятия и процессор могут обнаруживать присутствие и перемещение объектов в трехмерном пространстве вокруг узла восприятия, что позволяет задавать различные другие жесты как перемещения в этом трехмерном пространстве, а не в одно- или двухмерном пространстве.
Различные заранее заданные основные жесты, подлежащие обнаружению, могут включать в себя, например, жест приближения/отдаления (перемещение в отрицательном или положительном направлении оси z), скользящий жест (перемещение в плоскости xy), парящий жест (стационарное перемещение) и жест наклона (поворот внешнего объекта вокруг соответствующей оси тангажа, крена или рыскания), а также различные комбинации этих четырех основных жестов. Узел восприятия и процессор можно использовать для выполнения конкретной процедуры для обнаружения соответствующего одного из этих жестов и/или для обнаружения и нахождения различия между двумя или более заранее заданными жестами. Каждый заранее заданный жест (включая комбинированный жест) может быть связан с соответствующей заранее определенной операцией управления электронного устройства. В ряде случаев можно использовать определенные положения объекта в соответствующие моменты времени в ходе выполнения жеста, например для управления конкретной настройкой операции управления.
Как упомянуто выше, можно задавать жесты, осуществляемые в бесконтактном режиме (т.е., без касания экрана дисплея или аналогичного электронного устройства), хотя некоторые из них могут предусматривать касание электронного устройства. Кроме того, можно задавать жесты, имеющие заранее определенное начальное или конечное положение или другую ориентацию относительно электронного устройства или узла восприятия. Например, определенные жесты можно задавать для осуществления “со смещением” относительно экрана дисплея, чтобы перемещающийся объект не заслонял экран дисплея.
В отношении примеров заранее заданных жестов, фиг. 12-14 последовательно иллюстрируют жест отдаления, осуществляемый путем перемещения объекта, в этом случае, руки 111 пользователя, к электронному устройству 1200 (например, мобильному устройству), имеющему узел восприятия, например, узел восприятия 400. В частности, используя показанную трехмерную (3D) систему координат, жест отдаления можно задать как перемещение объекта в отрицательном направлении оси z из первой позиции, показанной на фиг. 12, во вторую позицию, более близкую к узлу восприятия 400, например, показанную на фиг. 14. В этом случае оказано, что рука пользователя располагается над узлом восприятия 400 приблизительно по его центру, хотя это и не обязательно для обнаружения жеста отдаления. Аналогично, жест приближения можно задать как перемещение объекта в положительном направлении оси z из первой позиции, более близкой к узлу восприятия, во вторую позицию, более удаленную от узла восприятия. Как будет описано ниже, процедуру вычисления расстояния по оси z можно использовать для определения приближенного расстояния между объектом и электронным устройством в течение одного или нескольких периодов времени выполнения жеста отдаления или приближения.
В целом, скользящий жест или маха можно задать как перемещение объекта в заданной плоскости параллельно электронному устройству, и, предпочтительно, в целом, на постоянном расстоянии от электронного устройства (обычно над ним). Например, фиг. 15-17 последовательно иллюстрируют горизонтальный скользящий жест, осуществляемый путем перемещения руки 111 пользователя в плоскости xy и в отрицательном направлении оси x (указанном стрелкой 1502) от первой стороны 1504 электронного устройства 1200, параллельно электронному устройству и, предпочтительно, через узел восприятия 400, ко второй стороне 1506 электронного устройства 1200. Аналогично, скользящий жест сверху вниз (или снизу вверх) можно задать как перемещение объекта через воспринимающее устройство, например, от верхней стороны электронного устройства в отрицательном направлении оси y к нижней стороне электронного устройства, или в положительном направлении оси y снизу вверх. Также можно задать различные другие скользящие жесты, которые выполняются в указанном направлении в заданной плоскости xy. Частичный скользящий жест можно задать как перемещение, при котором объект проходит лишь часть пути от края до края электронного устройства. Общее положение объекта в координатах xy относительно электронного устройства можно определять в разные периоды времени выполнения скользящего жеста.
Парящий жест можно задать как отсутствие перемещения объекта, например, руки, обращенной ладонью вниз, в течение определенного периода времени, например, одной или нескольких секунд. Покрывающий жест можно задать как особый случай парящего жеста, например, когда объект, например, рука, согнутая в форме чаши касается электронного устройства и, по существу, покрывает узел восприятия. Жест наклона можно задать как поворот объекта, например руки, относительно оси крена (оси x), оси рыскания (оси y) или оси тангажа (оси z).
Комбинированный жест, например, жест ныряния или пикирования, можно задать как жест отдаления, после которого сразу же следует жест наклона. Например, жест ныряния можно задать с помощью объекта, например руки, которая приближается к узлу восприятия, причем пальцы первоначально направлены, в целом, к электронному устройству (жест отдаления в направлении -z), а потом меняют направление на, в целом, параллельное электронному устройству (в плоскости xy через жест наклона, например, относительно оси, параллельной оси x).
Определенные жесты можно задавать для осуществления рукой в конкретной конфигурации руки или пальца, и узел восприятия и процессор могут совершать дополнительные действия для обнаружения в определенных обстоятельствах конкретной конфигурации руки совместно с заранее заданным жестом. Например, одним таким жестом может быть скользящий жест, осуществляемый рукой, обращенной ладонью к узлу восприятия и двумя вытянутыми пальцами (например, в конфигурации символа мира). Также можно задавать различные другие жесты и конфигурации руки.
В основном, для обнаружения жестов, процессор управляет одним или несколькими фотопередатчиками узла восприятия для излучения света в течение последовательных периодов времени при осуществлении жеста, и один или несколько фотоприемников узла восприятия принимают любой свет, излучаемый соответствующим фотопередатчиком и затем отражаемый объектом (до приема фотоприемником) для генерации измеренных сигналов. Процессор, который, предпочтительно, включает в себя аналого-цифровой преобразователь, принимает эти измеренные сигналы от одного или нескольких фотоприемников и преобразует их в цифровую форму, например, в 10-битовые цифровые измеренные сигналы. Затем процессор анализирует все или часть этих цифровых измеренных сигналов по времени для обнаружения заранее заданного жеста и, возможно, для определения конкретной конфигурации руки, и, возможно, для определения одного или нескольких относительных положений или ориентаций объекта в один или несколько соответствующих моментов времени жеста. Анализ можно осуществлять путем определения конкретных шаблонов или признаков в одном или нескольких из наборов измеренных сигналов или наборов измененных или вычисленных сигналов. В ряде случаев, хронирование обнаруженных шаблонов или признаков в наборе измеренных сигналов можно сравнивать с хронированием обнаруженных шаблонов или признаков в других наборах измеренных сигналов. В ряде случаев можно определять расстояния по оси z, положения в плоскости xy и/или амплитуды обнаруженных шаблонов или признаков. Также можно осуществлять другую манипуляцию данными. Заранее заданные основные жесты можно обнаруживать по отдельности или можно обнаруживать в заранее заданных комбинациях, что позволяет осуществлять интуитивное и сложное управление электронным устройством.
На фиг. 18 представлен иллюстративный способ обнаружения заранее заданного основного жеста, который можно использовать в узле восприятия наподобие любого из описанных выше, включая содержащий множественные фотопередатчики и, по меньшей мере, один фотоприемник, или содержащий множественные фотоприемники и, по меньшей мере, один фотопередатчик, или включая содержащий множественные приемопередатчики (с пирамидальной конструкцией или без нее). В случае множественных фотопередатчиков, которые могут окружать единичный фотоприемник, как описано выше, каждый из фотопередатчиков ориентирован так, чтобы излучать инфракрасный свет из электронного устройства вдоль соответствующей центральной оси передачи, причем каждая центральная ось передачи проходит в отдельном направлении относительно узла восприятия и электронного устройства. Таким образом, большая часть объема по соседству с электронным устройством может достигаться излучаемым инфракрасным светом, чтобы можно было отслеживать перемещение объекта по этому объему. Аналогичной способностью отслеживать перемещение объекта обладает узел восприятия, имеющий множественные фотоприемники, которые могут окружать единичный фотопередатчик, или узел восприятия, имеющий множественные приемопередатчики (в котором каждый приемопередатчик, в сущности, включает в себя фотопередатчик, совмещенный с фотоприемником).
В частности, иллюстративный способ начинается на этапе 1800, где происходит инициирование, указывающее необходимость начала процедуры обнаружения жеста. Инициирование может осуществляться разными путями, например, когда пользователь запускает или выделяет конкретное приложение на электронном устройстве, конкретный участок или этап приложения, или когда пользователь указывает необходимость инициирования обнаружения жеста с использованием одного из различных устройств ввода электронного устройства заранее определенным образом, или посредством комбинации этих этапов. Процессор может быть способен осуществлять различные процедуры обнаружения жеста по отдельности или одновременно.
На этапе 1802 процессор управляет фотопередатчиком(ами) для управления хронированием и интенсивностью инфракрасного света, излучаемого фотопередатчиком(ами). Например, если узел восприятия включает в себя единичный фотопередатчик, фотопередатчик управляется для излучения света в течение каждого из множественных последовательных периодов времени при перемещении внешнего объекта согласно указанному шаблону перемещения. Если узел восприятия включает в себя множественные фотопередатчики, каждым из фотопередатчиков можно управлять для излучения света в течение соответствующего, неперекрывающегося участка каждого из множественных последовательных периодов времени при перемещении внешнего объекта согласно указанному шаблону перемещения. Таким образом, каждый измеренный сигнал, генерируемый фотоприемником, может быть связан с соответствующим фотопередатчиком. Длительность периода времени предпочтительно выбирать так, чтобы величина перемещения объекта в течение периода времени была пренебрежимо мала по сравнению с полным перемещением объекта при выполнении полного жеста. В ряде вышеописанных случаев, каждый фотопередатчик может излучать свет на разных частотах (длинах волны) или полосах, и затем этими фотопередатчиками можно управлять для передачи света в одно и то же время в течение каждого из периодов времени. Преимуществом фотопередатчиков, передающих в одно и то же время, является увеличение скорости.
На этапе 1804 фотоприемник(и) генерирует(ют) измеренные сигналы, указывающие интенсивность принятого света. Например, исходя из того, что узел восприятия включает в себя множественные фотопередатчики и, по меньшей мере, один фотоприемник, для каждого фотопередатчика и для каждого периода времени, фотоприемник может генерировать соответствующий измеренный сигнал, указывающий соответствующее количество инфракрасного света, исходящего из этого соответствующего фотопередатчика в течение этого соответствующего периода времени и отраженного внешним объектом до приема фотоприемником. Если фотопередатчики передают свет в одно и то же время, то измеренные сигналы можно декодировать, например, путем фильтрации по частоте, чтобы определить, какие сигналы исходят из каких фотопередатчиков. Для этого также можно использовать множественные фотоприемники.
В другом примере, в котором узел восприятия включает в себя множественные фотоприемники и, по меньшей мере, один фотопередатчик, для каждого из множества фотоприемников и для каждого из множества последовательных периодов времени, может генерироваться соответствующий измеренный сигнал, указывающий соответствующее количество инфракрасного света, исходящего из фотопередатчика в течение соответствующего периода времени и отраженного внешним объектом до приема соответствующим фотоприемником.
Как описано ниже, интенсивностью излучаемого инфракрасного света можно управлять так, чтобы гарантировать, что фотоприемники не находятся в состоянии насыщения, чтобы измеренные сигналы обеспечивали полезную информацию.
Измеренные сигналы предпочтительно цифровать А/Ц преобразователем для обеспечения наборов цифровых измеренных сигналов, причем каждый цифровой набор измеренных сигналов соответствует соответствующему фотопередатчику (например, в случае множественных фотопередатчиков и единичного фотоприемника) или соответствующему фотоприемнику (например, в случае множественных фотоприемников и единичного фотопередатчика). Цифровые сигналы также можно корректировать для учета ненулевых значений, полученных, когда соответствующий фотопередатчик не излучает свет. Это позволяет получать один или несколько измеренных сигналов, когда ни один фотопередатчик не передает, и вычитать это значение из цифровых значений для получения скомпенсированных значений цифрового сигнала. Например, предполагая использование узла восприятия, например, узла восприятия 400, показанного на фиг. 4, который включает в себя единичный фотоприемник 492, окруженный четырьмя фотопередатчиками 484, 486, 488 и 490, можно первоначально получать фоновые показания от фотоприемника 492, когда ни один фотопередатчик не передает, и затем каждый фотопередатчик можно по очереди включать в импульсном режиме и получать четыре соответствующие сигнала или показания измеренной интенсивности, соответствующие одному периоду времени. Эти четыре показания можно компенсировать, вычитая фоновое показание, и эту процедуру можно повторять для каждого последующего периода времени.
Для обеспечения значимых измерений во всем диапазоне возможных положений объекта, можно реализовать схему автоматической регулировки мощности для управления интенсивностью излучаемого инфракрасного света на этапе 1802 во избежание насыщения фотоприемника(ов). В нижеследующем описании, в свою очередь, предполагается использование узла восприятия 400, показанного на фиг. 4, т.е. имеющего множественные передатчики и единичный фотоприемник, однако аналогичная операция применяется к другим вариантам осуществления узла восприятия. В основном, схема регулировки мощности получает соответствующие измеренные сигналы с помощью фотопередатчиков, работающих на одной из различных настроек мощности в течение, по меньшей мере, одного периода времени и удостоверяется, что фотоприемник не вырабатывает сигналы в верхней части выходного диапазона в течение этого периода времени. Например, можно использовать три разные настройки мощности для фотопередатчиков: высокую настройку, среднюю настройку и низкую настройку. Сначала получаются соответствующие измеренные сигналы от фотоприемника, соответствующего каждому из фотопередатчиков, причем фотопередатчики управляются для излучения света на высокой настройке в течение периода времени (причем фотопередатчиками можно управлять для излучения света на соответствующих участках периода времени, если они излучают свет на одной частоте или в одной полосе, и причем фотопередатчиком можно управлять для излучения света в одно и то же время в течение периода времени, если они излучают свет на разных частотах или в разных полосах). Если измеренные сигналы указывают отсутствие насыщения, то эти сигналы используются в последующих вычислениях, соответствующих этому периоду времени. Если измеренные сигналы, соответствующие высокой настройке, достигают насыщения, то дополнительные измерения проводятся в последующий период времени на средней настройке мощности. Если измеренные сигналы, соответствующие средней настройке, указывают отсутствие насыщения, то эти сигналы используются в последующих вычислениях. Если измеренные сигналы, соответствующие средней настройке, указывают, что фотоприемник достиг насыщения, то дополнительные измерения проводятся в последующий период времени на низкой настройке мощности и используются в последующих вычислениях. Низкая настройка мощности устанавливается для выработки измеренных сигналов чуть ниже насыщения, когда фотоприемник полностью накрыт объектом на поверхности узла восприятия. Эту процедуру можно повторять для каждого из периодов времени, необходимых для обнаружения жеста.
Как отмечено выше, измеренные цифровые сигналы характеризуют интенсивность отраженного инфракрасного света. Уровни мощности можно выбирать для обеспечения некоторого перекрытия между уровнями, чтобы измеренные сигналы для разных уровней мощности можно было преобразовать к стандартному масштабу, что позволило бы объединить их в непрерывную кривую. Например, можно брать данные из перекрывающихся областей (например, соответствующих нескольким жестам отдаления или приближения) и осуществлять аппроксимацию кривой. В одном примере, получаются следующие уравнения для преобразования измерений, полученных на различных уровнях мощности, к стандартному масштабу интенсивности, обозначенному I:
I=IPowerLevel=high
I=12*I PowerLevel=medium+38
I=128*I PowerLevel=low+3911
Вышеописанным образом, можно получить наборы измеренных сигналов, которые обеспечивают значения интенсивности в течение времени, соответствующие разным фотопередатчикам, излучающим свет в разных направлениях или соответствующим разным фотоприемникам, принимающим свет с разных направлений. Каждый цифровой набор измеренных сигналов может обеспечивать релевантную информацию относительно присутствия или отсутствия объекта в соответствующем объеме, соответствующем соответствующему фотопередатчику или фотоприемнику, и относительно узла восприятия.
На этапе 1806, один или несколько из наборов измеренных сигналов оцениваются для обнаружения заранее заданного жеста и для определения соответствующих положений объекта в различные моменты времени в ходе выполнения жеста. Например, как дополнительно описано ниже, можно рассматривать конкретный признак набора измеренных сигналов и можно сравнивать хронирование этого признака с хронированием соответствующего признака в одном или нескольких других наборах измеренных сигналов для обнаружения жеста. Кроме того, как также описано ниже, один или несколько из наборов измеренных сигналов, или их части, можно комбинировать определенным образом и оценивать для извлечения релевантной информации относительно присутствия жеста.
На этапе 1807 производится определение, обнаружен ли жест. Если да, то обработка переходит к этапу 1808, в противном случае обработка переходит к этапу 1809. На этапе 1809 генерируется запрос пользователю повторить жест, после чего обработка переходит к этапу 1802.
На этапе 1808 осуществляется управление работой электронного устройства в соответствии с обнаруженным жестом, например, путем управления конкретной функцией электронного устройства или управления выбором контента, хранящегося на электронном устройстве. Каждый из различных заранее заданных жестов можно связать с любой из различных операций электронного устройства, хотя предпочтительно, чтобы каждый из заранее заданных жестов управляли работой или действием электронного устройства интуитивным образом. Например, обнаружение жеста отдаления можно использовать для уменьшения или ограничения функции, например, для снижения громкости музыкального проигрывателя, или осуществления операция масштабирования для признака камеры электронного устройства, причем расстояние от объекта до электронного устройства в указанное время можно коррелировать с величиной изменения громкости или операции масштабирования. Аналогично, жест приближения можно использовать для соответствующего увеличения функции. Жесты отдаления и приближения также можно использовать для навигации по вложенным меню, изображениям, или другим элементам, которые можно выбирать.
В порядке другого примера, скользящий жест по экрану дисплея сверху вниз может означать удаление или закрытие приложения, тогда как скользящий жест из стороны в сторону экрана дисплея может указывать функцию прокрутки и т.п., причем относительное положение объекта в плоскости xy в ходе выполнения скользящего жеста связано с позицией курсора на экране дисплея электронного устройства. Парящий жест, особенно совместно с другими жестами для определения положения элемента, может означать выбор элемента после определения его положения, например, выбор конкретного файла, изображения, песни или другого элемента. Жест наклона, например, относительно оси y, может означать перелистывание страниц электронной книги или фотоальбома.
Преимущественно, конкретный жест (в том числе, конкретный комбинированный жест) можно использовать для простого и быстрого выбора одного или нескольких элементов, отображаемых на экране дисплея электронного устройства, в бесконтактном режиме. Поскольку заранее заданные жесты можно обнаруживать в трехмерном пространстве, различные меню или списки элементов, например, контактов или изображений можно размещать на экране дисплея электронного устройства, имитируя трехмерное размещение. Конкретные элементы можно выбирать с использованием одного или нескольких заранее заданных жестов (включающих в себя отдаляющие/приближающие, скользящие, наклоняющие и парящие жесты) для управления перемещением соответствующего курсора или другого устройства выбора в трехмерном расположении элементов. Например, если на экране дисплея электронного устройства показано несколько групп из двух или более наложенных друг на друга окон (или фотографий, документов или других элементов), пользователь может выполнить один или несколько скользящих жестов для выбора нужной группы, сопровождаемых жестом отдаления для маневрирования в стопке. Альтернативно, пользователь может выполнить скользящий жест, чтобы оттолкнуть одно или несколько вышележащих окон с пути, или пользователь может приблизить руку к экрану, выполняя жест отдаления, сопровождаемый жестом наклона, чтобы «поднырнуть» под одно или несколько вышележащих окон и вытянуть нижележащее окно в сторону, чтобы лучше рассмотреть его.
Как упомянуто выше, различные процедуры обнаружения жеста, включающие в себя различные этапы обработки, можно осуществлять для оценивания измеренных сигналов. Например, предполагая использование узла восприятия 400, показанного на фиг. 4, на фиг. 19 показан иллюстративные кривые 1900, 1902, 1904 и 1906 интенсивности как функции времени, которые представляют наборы измеренных цифровых сигналов, соответствующих соответствующим фотопередатчикам 484, 486, 488, и 490 для жеста отдаления. В основном, когда объект приближается к узлу восприятия 400, соответствующие значения интенсивности в каждом наборе возрастают в течение одного и того же временного кадра (который включает в себя множество последовательных периодов времени), и если объект располагается, в целом, по центру над узлом восприятия при осуществлении жеста, величина, на которую увеличивается каждый набор значений на протяжении этого временного кадра, по существу, одинакова, как показано на фиг. 19.
В случаях, когда объект несколько смещен относительно узла восприятия, минимальные значения интенсивности и максимальные значения интенсивности (соответствующие, соответственно, случаям, когда объект находится на большом расстоянии и когда объект находится на малом расстоянии) из наборов измеренных сигналов достигаются в примерно одни и те же соответствующие моменты времени, но имеют разные значения (амплитуды) в одни и те же соответствующие моменты времени для разных наборов. Например, на фиг. 20 показаны иллюстративные кривые 2000, 2002, 2004 и 2006 интенсивности как функции времени, которые представляют наборы измеренных цифровых сигналов, соответствующих соответствующим фотопередатчикам 484, 486, 488 и 490 для жеста приближения, и демонстрируют, что при удалении объекта от узла восприятия, соответствующие значения интенсивности наборов измеренных сигналов уменьшаются в течение одного и того же временного кадра. Если объект располагается, в целом, по центру над узлом восприятия при осуществлении жеста, величина, на которую уменьшается каждый набор значений на протяжении временного кадра, в общем случае, одинакова. Однако, как показано на фиг. 20, в случае, когда объект несколько смещен относительно узла восприятия, располагаясь при этом, например, примерно по центру правой стороны узла восприятия 400, минимальные и максимальные значения интенсивности, соответствующие каждому из наборов измеренных сигналов, достигаются примерно в одни и те же соответствующие моменты времени, но имеют разные значения. В этом случае, если объект располагается, в целом, по центру правой стороны узла восприятия 400, то набор измеренных сигналов, соответствующий фотопередатчику на правой стороне, а именно, фотопередатчику 486, будет иметь наибольшие значения, наборы измеренных сигналов, соответствующие фотопередатчикам 484 и 488, будут, в целом, следовать близким кривым, и набор измеренных сигналов, соответствующий фотопередатчику 490, наиболее удаленному от объекта и направляющему свет от объекта, будет иметь меньшие значения по сравнению с другими. Заметим, что интенсивность связана с расстоянием обратно пропорциональным, нелинейным соотношением, и, исходя из того, что жест отдаления или приближения осуществляется с приблизительно постоянной скоростью, значения интенсивности будут увеличиваться или уменьшаться нелинейно.
Таким образом, процедура обнаружения жеста для обнаружения жеста отдаления (или приближения) может включать в себя этапы оценивания одного или нескольких из наборов измеренных сигналов для определения, увеличиваются ли (или уменьшаются) соответствующие значения интенсивности с течением времени, и может включать в себя этапы сравнения амплитуд этих наборов друг с другом в один или несколько моментов времени. Количество разных наборов измеренных сигналов, подлежащих оцениванию, может зависеть от того, необходимо ли обнаруживать и различать другие жесты, и какими могут быть эти другие жесты. Например, если необходимо обнаружить только жест отдаления, то для определения последовательного возрастания значений интенсивности может оказаться достаточно оценить единичный набор измеренных сигналов, однако, если желательно отличить, в целом, центрированный жест отдаления от смещенного жеста отдаления, то в анализ придется включить два или более из наборов измеренных сигналов.
Этапы обработки можно осуществлять на наборах измеренных цифровых сигналов для преобразования значений интенсивности в соответствующие расстояния. В частности, процессор можно запрограммировать на осуществление процедуры определения расстояния по оси Z с использованием измеренных цифровых сигналов для определения относительного расстояния объекта от центральной поверхности (или другой поверхности отсчета на электронном устройстве) в один или несколько разных моментов времени в ходе выполнения жеста отдаления или приближения. Поскольку интенсивность измеренного отраженного света (т.е. измеренного сигнала) зависит от размера, цвета и текстуры поверхности/ отражательной способности объекта, точное значение расстояния невозможно определить исключительно на основании интенсивности принятого сигнала, но электронное устройство можно калибровать для обеспечения приближенного определения расстояния на основании использования конкретного объекта, например, открытой руки среднего размера. Альтернативно, пользователь может осуществлять калибровочную процедуру для персонализации левой или правой руки отдельного пользователя.
В частности, интенсивность отраженного света изменяется как функция 1/расстояние2. Затем, результирующее расстояние или значение Z, соответствующее каждому из фотопередатчиков, можно вычислить и масштабировать в пределах определенного диапазона на основании измеренного значения интенсивности. Например, предполагая наличие четырех фотопередатчиков, значения расстояния Z1, Z2, Z3 и Z4, соответствующие соответствующему фотопередатчику, можно вычислять как 10-битоые значения в заранее определенном диапазоне, например, от 0 до 1000 (любые результаты, превышающие 1000, устанавливаются равными 1000) согласно следующему уравнению относительно измеренной интенсивности I:
Z=10000/sqrt(I)
В ряде случаев, среднее значение Z, выражающее расстояние, можно затем вычислять, усредняя вычисленные значения Z, соответствующие множественным фотопередатчикам, например:
Zavg=(Z1 +Z2+Z3+Z4)/4
В ряде случаев, расстояния можно вычислять с использованием соответствующих измеренных сигналов от подмножества всех фотопередатчиков (или фотоприемников).
В одном варианте осуществления, процессор можно запрограммировать на вычисление соответствующих расстояний для каждого из последовательных периодов времени выполнения жеста отдаления или приближения. Для жеста отдаления, эти расстояния последовательно уменьшаются со временем (в целом, линейно, при условии постоянной скорости жеста отдаления), и для жеста приближения, эти расстояния последовательно увеличиваются со временем. Таким образом, можно связать соответствующее вычисленное расстояние с позицией курсора, например, для определения положения конкретного элемента в стопке элементов на экране дисплея электронного устройства, или связать соответствующее вычисленное расстояние с конкретным изменением или величиной изменения настройки управления, например, для функции регулировки громкости или масштаба.
В отношении скользящего жеста, исходя из того, что расстояние по оси z от объекта до узла восприятия остается сравнительно постоянным, наличие скользящего жеста и его направление можно определять, исследуя хронирование возникновения пиков интенсивности в соответствующих наборах измеренных сигналов по отношению к одному или нескольким другим наборам измеренных сигналов. Чем ближе объект к центральной оси передачи конкретного фотопередатчика, тем больше света от этого передатчика будет отражаться и приниматься фотоприемником, например, фотоприемником 492 узла восприятия 400, показанного на фиг. 4. Хронирование пиков интенсивности в каждом наборе измеренных сигналов по отношению к другим наборам измеренных сигналов обеспечивает информацию относительно направления перемещения объекта. Например, на фиг. 21 показаны иллюстративные кривые 2100, 2102, 2104 и 2106 интенсивности как функции времени, которые представляют наборы измеренных сигналов, соответствующих соответствующим фотопередатчикам 486, 484, 488 и 490 для скользящего жеста, осуществляемого объектом, например, рукой, который перемещается над узлом восприятия 400, показанным на фиг. 4, и, в частности, показан скользящий жест объекта, перемещающегося от правой стороны к левой стороне электронного устройства. Таким образом, объект первоначально располагается максимально близко к фотопередатчику 486, затем перемещается, минуя фотопередатчики 484 и 488 за примерно одинаковое время, и затем оказывается на минимальном расстоянии от фотопередатчика 490.
Аналогично, на фиг. 22 показаны иллюстративные кривые 2200, 2202, 2204 и 2206 интенсивности как функции времени для скользящего жеста, выполняемого объектом, перемещающимся сверху вниз через узел восприятия 400 (указанного здесь как вертикальный жест), причем кривые 2200, 2202, 2204 и 2206 представляют наборы измеренных сигналов, соответствующих соответствующим фотопередатчикам 484, 486, 490 и 488. В этом случае, объект перемещается сверху вниз, сначала минуя фотопередатчик 484, затем минуя фотопередатчики 486 и 490 за примерно одинаковое время, и затем минуя фотопередатчик 488, причем перемещение, в целом, центрировано относительно фотопередатчиков 486 и 490. Согласно фиг. 22, пик интенсивности в наборе измеренных сигналов, соответствующем фотопередатчику 484, возникает до пиков интенсивности в наборах измеренных сигналов, соответствующих фотопередатчикам 486 и 490, и пики интенсивности в наборах измеренных сигналов, соответствующих фотопередатчикам 486 и 490, возникают до пика интенсивности в наборе измеренных сигналов, соответствующем фотопередатчику 488. Хотя это не показано, в случае, когда скользящий жест осуществляется сверху вниз, но объект немного смещен от центрального положения между фотопередатчиками 486 и 490, например, располагается ближе к фотопередатчику 486, график, показанный на фиг. 22, претерпевает изменение, состоящее в том, что пики, соответствующие кривым 2200 (фотопередатчик 484), 2204 (фотопередатчик 490) и 2206 (фотопередатчик 488) уменьшаются, и пик, соответствующий кривой 2202 (фотопередатчик 486), увеличивается.
На фиг. 23 показан график, демонстрирующий анализ для распознавания скользящего жеста из стороны в сторону (также указанного здесь как горизонтальный скользящий жест) объекта от правой стороны к левой стороне электронного устройства с использованием узла восприятия 400. В частности, на фиг. 23 показана первая кривая интенсивности 2300, представляющая набор измеренных сигналов, соответствующий фотопередатчику 486, вторая кривая интенсивности 2302, представляющая набор измеренных сигналов, соответствующий фотопередатчику 490, расчетная третья кривая 2304, представляющая разностные значения интенсивности, например, значения интенсивности, соответствующие правому фотопередатчику 486 за минусом значений интенсивности, соответствующих левому фотопередатчику 490, в соответствующие периоды времени, и расчетная четвертая кривая 2306, представляющая средние значения интенсивности, например, значения интенсивности, соответствующие среднему значений интенсивности, соответствующих фотопередатчику 486 и фотопередатчику 490, в соответствующие периоды времени.
Если объект перемещается справа налево в ходе выполнения скользящего жеста, то вычисленные разностные значения сначала являются положительными, а затем отрицательными, что указывает кривая 2304. Если объект перемещается слева направо в ходе выполнения скользящего жеста, то вычисленные разностные значения сначала являются отрицательными, а затем положительными. Таким образом, вычисление и анализ разностных значений может обеспечивать информацию относительно присутствия и направления скользящего жеста. В ряде случаев, процедура обнаружения жеста предусматривает вычисление первой разностной кривой, представляющей значения интенсивности, соответствующие правому фотопередатчику 486, за минусом значений интенсивности, соответствующих левому фотопередатчику 490, и также может предусматривать вычисление второй разностной кривой, представляющей значения интенсивности, соответствующие левому фотопередатчику 490, за минусом значений интенсивности, соответствующих правому фотопередатчику 486. Положительный сигнал, сопровождаемый отрицательным сигналом в первой разностной кривой, свидетельствует о том, что скользящий жест произведен справа налево, и положительный сигнал, сопровождаемый отрицательным сигналом во второй разностной кривой, свидетельствует о том, что скользящий жест произведен слева направо.
Величина разностного сигнала зависит от того, насколько близко располагается объект к узлу восприятия при выполнении жеста. В одном варианте осуществления, соответствующий порог обнаружения 2308 выбирается и используется для определения, достиг ли разностный сигнал соответствующего положительного значения, и порог распознавания 2310 выбирается и используется для определения наличия жеста, когда сигнал достигает соответствующего отрицательного значения. Эти пороги могут обеспечивать дополнительную гарантию того, что скользящий жест действительно имел место.
Дополнительно, в процедуре обнаружения скользящего жеста также можно использовать средние значения интенсивности (указанные кривой 2306) из наборов измеренных сигналов, соответствующих периферийным фотопередатчикам 486 и 490, и устанавливать порог очистки 2312, показанный, например, на кривой 2306, по отношению к этим средним значениям интенсивности. Если вычисленная средняя интенсивность сигнала падает ниже этого порога очистки до того, как происходит распознавание жеста, то процедура сбрасывается в ожидании начала нового жеста.
Процедура обнаружения скользящего жеста также может предусматривать определение приближенных положений объекта в плоскости xy в разные моменты времени. Например, согласно фиг. 21, в момент времени A, объект, осуществляющий жест, располагается, в целом над фотопередатчиком 486, в момент времени B, объект располагается, в целом над фотопередатчиками 484 и 488, и в момент времени C, объект располагается, в целом над фотопередатчиком 490. Различные другие положения также можно определять с использованием интерполяции.
Процедуру обнаружения жеста, аналогичную описанной выше со ссылкой на фиг. 23, можно использовать для обнаружения вертикального жеста вместо горизонтального жеста. Кроме того, аналогичный анализ можно применять для определения скользящего жеста в другом направлении, например, в целом, по линии x=y.
Электронное устройство может действовать таким образом, что процедуры обнаружения жеста для обнаружения вертикальных (сверху вниз или снизу вверх) скользящих жестов и горизонтальных (из стороны в сторону) скользящих жестов осуществляются одновременно. В таком случае, заранее определенные пороги обнаружения и распознавания, соответствующие каждому типу скользящего жеста, можно увеличить по сравнению со случаем осуществления процедуры обнаружения единичного жеста.
Более сложные процедуры также можно применять для различения скользящих жестов, осуществляемых в разных направлениях, например, для различения вертикальных (сверху вниз или снизу вверх) скользящих жестов и горизонтальных (справа налево или слева направо) скользящих жестов. Это может быть особенно полезно, когда скольжение осуществляется в одном направлении, но также генерируются конфликтующие сигналы, указывающие, что также произведено скольжение в другом направлении. Например, это может происходить, когда объектом является рука или большой палец и части кисти или руки проходят в объем активной восприятия и влияют на формирование наборов измеренных сигналов. Лучше различать горизонтальные и вертикальные скольжения позволяет тот факт, что наклон набора разностных значений интенсивности по времени, соответствующий предусмотренному направлению скольжения в точке пересечения нуля больше, чем наклон набора разностных значений интенсивности, соответствующий непредусмотренному направлению скольжения.
В частности, согласно фиг. 24, первые, вертикальные, разностные значения интенсивности, представленные кривой 2400, вычисляются по отношению к вертикально выровненным фотопередатчикам (например, фотопередатчикам 484 и 488), и вторые, горизонтальные, разностные значения интенсивности, представленные кривой 2402, вычисляются по отношению к горизонтально выровненным фотопередатчикам (например, фотопередатчикам 486 и 490). Первый наклон первого набора разностных значений интенсивности вычисляется в точке пересечения нуля 2403, и также вычисляется второй наклон второго набора разностных значений интенсивности. Вычисление первого наклона можно осуществить, взяв три значения за точкой пересечения нуля и одно значение перед ней, и посчитав разность между максимальным и минимальным из этих значений. Аналогичным образом, можно определить второй наклон, соответствующий второму набору разностных значений интенсивности. Если первый наклон превышает второй наклон, что, например, показано на фиг. 24, то определяется наличие вертикального скользящего жеста, если же второй наклон превышает первый наклон, то определяется наличие горизонтального скользящего жеста.
Определять, выполнен ли умышленный жест в горизонтальном или вертикальном направлении, можно и различными другими путями, в том числе, вычисляя вертикальный и горизонтальный наборы сигналов средней интенсивности, представленные соответствующими кривыми 2404 и 2406, и определяя, соответствует ли наибольшее среднее значение вертикальному или же горизонтальному набору сигналов, причем наибольшее среднее значение указывает, что умышленный жест произведен в соответствующем вертикальном или горизонтальном направлении. Другой способ предусматривает определение наибольшего значения интенсивности, соответствующего одному из фотопередатчиков на пороге обнаружения, из которого можно вывести начальную точку жеста. Еще один способ предусматривает анализ величины разности между положительным пиком и отрицательным пиком, как между средними сигналами по горизонтали и вертикали.
На фиг. 25 показана иллюстративная кривая 2500, представляющая набор измеренных сигналов, соответствующий фотопередатчику, например, фотопередатчику 486 узла восприятия 400, причем горизонтальный скользящий жест осуществляется рукой в конфигурации символа мира (когда пальцы, в целом, указывают в направлении оси y). В этом случае, конфигурацию руки можно обнаруживать путем определения присутствия двух соседних пиков в одном или нескольких из наборов измеренных сигналов. Как описано выше, хронирование этих двух соседних пиков по сравнению с хронированием соответствующих пиков одного или нескольких из различных других фотопередатчиков (например, фотопередатчика 490) обеспечивает информацию относительно направления скользящего жеста.
На фиг. 26 показаны иллюстративные кривые 2600, 2602, 2604 и 2606, представляющие наборы измеренных сигналов, соответствующие фотопередатчикам 484, 486, 488 и 490, для парящего жеста, который представляет собой приостановку перемещения в течение заранее определенного периода времени, и который осуществляется, например, когда объект, например открытая рука, перемещается из позиции, в целом, центрированной над узлом восприятия 400, в позицию ближе к узлу восприятия и остается там в течение заранее заданного периода времени. Как показано, кривые 2500, 2502, 2504 и 2506 представляют парящий жест соответствующим выравниванием, причем интенсивность остается неизменной в течение заранее определенного времени, например нескольких секунд, для каждого из наборов измеренных сигналов. Соответствующее расстояние парящего жеста от узла восприятия можно определять вышеописанным образом.
На фиг. 27 показаны иллюстративные кривые 2700, 2702, 2704, и 2706, которые представляют наборы измеренных сигналов, соответствующих соответствующим фотопередатчикам 490, 484, 488, и 486 для жеста наклона. В этом случае, жест наклона представляет собой поворот объекта (например, открытой руки, находящейся над узлом восприятия и выровненной с пальцами, указывающими в направлении +y) относительно оси, в целом, параллельной оси y, начиная с ориентации с наклоном влево, проходя через ориентацию руки, в целом, перпендикулярную мобильному устройству, и заканчивая ориентацией с наклоном вправо. Как показано, пик интенсивности, соответствующий фотопередатчику 490, имеет максимальную величину, которая превышает остальные во время существования ориентации с наклоном влево (временной кадр 2708), и пик интенсивности, соответствующий фотопередатчику 486, имеет величину, которая меньше других во время существования ориентации с наклоном влево (временной кадр 2708). Когда рука переходит к ориентации в целом, перпендикулярной мобильному устройству, все фотопередатчики имеют, в целом, аналогичные значения интенсивности (временной кадр 2710). Во время существования ориентации с наклоном вправо (временной кадр 2712), пик интенсивности, соответствующий фотопередатчику 486, больше других, и пик интенсивности, соответствующий фотопередатчику 490, меньше других. Распознавая такие шаблоны в наборах измеренных сигналов, можно обнаруживать жест наклона. Кроме того, приближенные ориентации руки можно определять в различные моменты времени в ходе выполнения жеста.
В отношении других заранее заданных жестов или других конфигураций руки, эти другие жесты можно обнаруживать методами, аналогичными описанным выше, а именно, путем обнаружения определенных шаблонов или признаков, идентифицированных в отношении соответствующих наборов измеренных сигналов, например, хронирования пиков интенсивности в одном наборе относительно пиков интенсивности в одном или нескольких других наборах.
Использование двух или более последовательных жестов и их обнаружение может обеспечивать электронное устройство дополнительными возможностями управления. Возможны многие разные наборы последовательных жестов, которые могут включать в себя одинаковые или разные жесты, и с этими разными наборами может быть связано много разных операций. В общем случае, для обнаружения последовательных жестов применяются методы, идентичные или аналогичные рассмотренным выше. Заметим, что последовательные жесты не эквивалентны комбинированному жесту. У комбинированного жеста не будет всех наборов сигналов, измеренных как близкие к нулю в любое время в ходе выполнения жеста. Если все наборы сигналов измеряются как близкие к нулю, это указывает, в данный момент не выполняется никаких жестов, и, таким образом, этот период тишины разделяет последовательные жесты.
Последовательность жестов может иметь преимущество для обеспечения многоступенчатого управления электронного устройства. Например, электронное устройство может действовать так, что один или несколько первых жестов можно осуществлять для определения положения элемента, и второй жест можно осуществлять для выбора или запуска элемента. В частности, один или несколько последовательных скользящих жестов позволяют пользователю прокручивать документ или множество файлов, когда лишь часть документа или файлов может единовременно отображаться на экране дисплея. Когда пользователь определяет положение конкретного нужного участка документа или нужного файла, можно осуществлять парящий жест для выбора или запуска этого соответствующего участка или файла.
Другой пример ряда последовательных жестов приведен на фиг. 28-31. В частности, так показан объект 2800, который перемещается относительно электронного устройства, например, мобильного устройства 2802. Мобильное устройство 2802 включает в себя узел восприятия, например узел восприятия 400, показанный на фиг. 4. Показано, что сначала можно осуществлять жест отдаления, указанный стрелкой 2804 на фиг. 28, сопровождаемый жестом наклона, например, поворотом объекта 2800 относительно оси, параллельной оси x, что указано стрелками 2902, 2904 на фиг. 29. Затем можно осуществлять скользящий жест, указанный стрелкой 3000 на фиг. 30, и окончательные позиция и ориентация объекта 2800 показаны на фиг. 31. Исходя из того, что позиция объекта 2800 первоначально связана для управления позицией курсора на экране дисплея мобильного устройства 2802, эту последовательность жестов можно использовать, например, для того, чтобы сначала идентифицировать конкретный элемент в стопке элементов с использованием жеста отдаления, затем выбрать идентифицированный элемент с использованием жеста наклона, и перенести выбранный элемент в другую область на экране дисплея с использованием скользящего жеста. Если бы эти последовательные жесты осуществлялись один за другим без устранения объекта 2800 в промежутке между выполнением основных жестов, они могли бы стать единым комбинированным жестом.
В определенных случаях предпочтительно управлять электронным устройством с использованием процедуры интерпретации смещения для интерпретации жестов, которые осуществляются, когда объект смещен относительно, в целом, центрированной позиции по отношению к узлу восприятия. Как упомянуто выше, жесты, осуществляемые со смещением, например, к стороне узла восприятия, могут иметь преимущество в том, что экран дисплея электронного устройства может оставаться незагороженным, и смещенные жесты могут управлять соответствующими перемещениями индикатора на экране дисплея.
Фиг. 32-33 иллюстрируют возможность управления электронным устройством 3200 с использованием смещенных жестов. Как показано, электронное устройство 3200 может включать в себя экран дисплея 3202 и узел восприятия 400. Первоначально, на электронном устройстве выполняется процедура обнаружения жеста, например, описанная выше, благодаря чему, положение объекта, например руки 111, в некоторый момент времени управляет соответствующим положением индикатора 3204 (например, курсора) на экране дисплея 3202. Когда рука 111 неподвижна и, в целом, располагается по центру над узлом восприятия 400, индикатор 3204 находится в соответствующем заранее определенном исходном положении 3206, и затем перемещение руки 111 относительно, в целом, центрированного положения над узлом восприятия 400 управляет соответствующим перемещением индикатора 3204 на экране дисплея относительно опорного положения 3206. Можно задать первый указанный шаблон перемещения, который, при осуществлении и обнаружении, инициирует выполнение процедуры интерпретации смещенного жеста. Когда на электронном устройстве выполняется процедура интерпретации смещенного жеста, осуществляется операция центрирования для возвращения в центр индикатора 3204 на экране дисплея в соответствии с обнаруженным опорным положением смещения, как описано ниже, в результате чего, перемещение руки 111 в новое положение относительно обнаруженного опорного положения будет управлять соответствующим перемещением индикатора 3204 на экране дисплея в соответствующее новое положение относительно опорного положения 3206.
Например, первый указанный шаблон перемещения может представлять собой комбинированный жест, включающий в себя скользящий жест, сопровождаемый парящим жестом. Исходя из того, что на электронном устройстве выполняется процедура обнаружения жеста, когда рука 111 перемещается для выполнения скользящего жеста, указанного стрелкой 3208 на фиг. 32, индикатор 3204 управляется для перемещения в соответствующем направлении, указанном стрелкой 3210. Когда рука 111 достигает нужного опорного положения смещения, например, обозначенного 3302, парящий жест можно осуществлять в течение заранее определенного промежутка времени (например, 1 или 2 секунд). Электронное устройство 3200 идентифицирует парящий жест и обнаруживает соответствующее положение 3302 руки 111 в ходе выполнения парящего жеста. В ответ на идентификацию парящего жеста, следующего после идентифицированного скользящего жеста, индикатор 3204 повторно центрируется в опорное положение 3206. Опорное положение 3206 на экране дисплея теперь связано с обнаруженным опорным положением смещения 3302 парящего жеста, благодаря чему, дополнительное перемещение руки из положения 3302 может управлять соответствующим перемещением индикатора 3204 из опорной точки 3206. Например, смещенный скользящий жест в направлении оси 3304 в плоскости xy будет управлять соответствующим перемещением индикатора 3204 вдоль параллельной оси 3306 на экране дисплея 3202. Таким образом, путем определения соответствующих положений объекта в разные моменты времени в ходе выполнения смещенного жеста, можно управлять соответствующими последующими положениями индикатора 3204 на экране дисплея.
Опорное положение смещения 3302 объекта также может включать в себя компонент ориентации или наклона. Таким образом, отслеживаются не только изменения относительного положения (относительно опорного положения смещения в трехмерном пространстве), но также могут отслеживаться изменения относительной ориентации (относительно опорного положения смещения в ориентации относительно оси крена, тангажа или рыскания). Таким образом, если человеку удобнее держать объект (например, руку пользователя) под углом при использовании смещенных жестов, угол можно включать в опорное положение смещения 3302. Кроме того, отклонение играет роль жеста наклона, тогда как сохранение наклона, измеренного в течение процедуры повторного центрирования, рассматривается как “плоское”. Другими словами, положение и ориентация внешнего объекта на момент измерения повторного центрирования является новыми опорными положением и ориентацией [x=0, y=0, z=0, tilt=0], используемыми для последующего слежения за объектом и обнаружения жеста.
Узел восприятия, имеющий четыре или более соответствующих фотопередатчиков или фотоприемников (например, узел восприятия 400) можно использовать для обнаружения смещенных жестов. В примере, показанном на фиг. 32 и 33, при осуществлении жестов, смещенных к правой стороне узла восприятия 400, хотя набор измеренных сигналов, соответствующий самому левому фотопередатчику 3308, обеспечивает мало или вообще не обеспечивает информации, касающейся положения или ориентации руки 111 (поскольку он, скорее всего, не принимает излученный свет, который отражается рукой), три другие фотопередатчика соответствуют сгенерированным наборам измеренных сигналов, которые обеспечивают информацию, достаточную для обнаружения перемещения и определения соответствующих положений объекта в течение времени в ходе выполнения смещенного жеста.
Узел восприятия 400 и процессор также может обнаруживать соответствующую ориентацию объекта в различные моменты времени при осуществлении смещенного жеста. Например, индикатор 3204 может быть элементом, например, самолетом в видеоигре, и ориентацией самолета на экране дисплея можно управлять с использованием различных жестов наклона, осуществляемых со смещением, которые можно осуществлять и обнаруживать по аналогии с тем, как описано выше со ссылкой на фиг. 27. Таким образом, смещенные жесты можно применять для управления положениями и ориентациями индикатора на экране дисплея в течение времени.
Благодаря поддержке операции повторного центрирования, пользователь может осуществлять смещенные жесты для управления работой электронного устройства, не мешая обзору экрана дисплея электронного устройства. Таким образом, жесты можно обнаруживать по отношению к опорному положению (и, в необязательном порядке, опорной ориентации), которое не центрировано относительно узла восприятия. В некоторых реализациях, смещенные жесты осуществляются в трехмерном пространстве, которое находится за пределами объема, нормального к конкретному участку экрана дисплея. В этой реализации, маловероятно, чтобы жестикулирующий объект затруднял обзор дисплея для пользователя.
Следует особо оговорить тот факт, что настоящее изобретение не ограничивается представленными здесь вариантами осуществления и иллюстрациями, но включает в себя модифицированные формы этих вариантов осуществления, в том числе части вариантов осуществления и комбинации элементов разных вариантов осуществления в соответствии с объемом нижеследующей формулы изобретения.
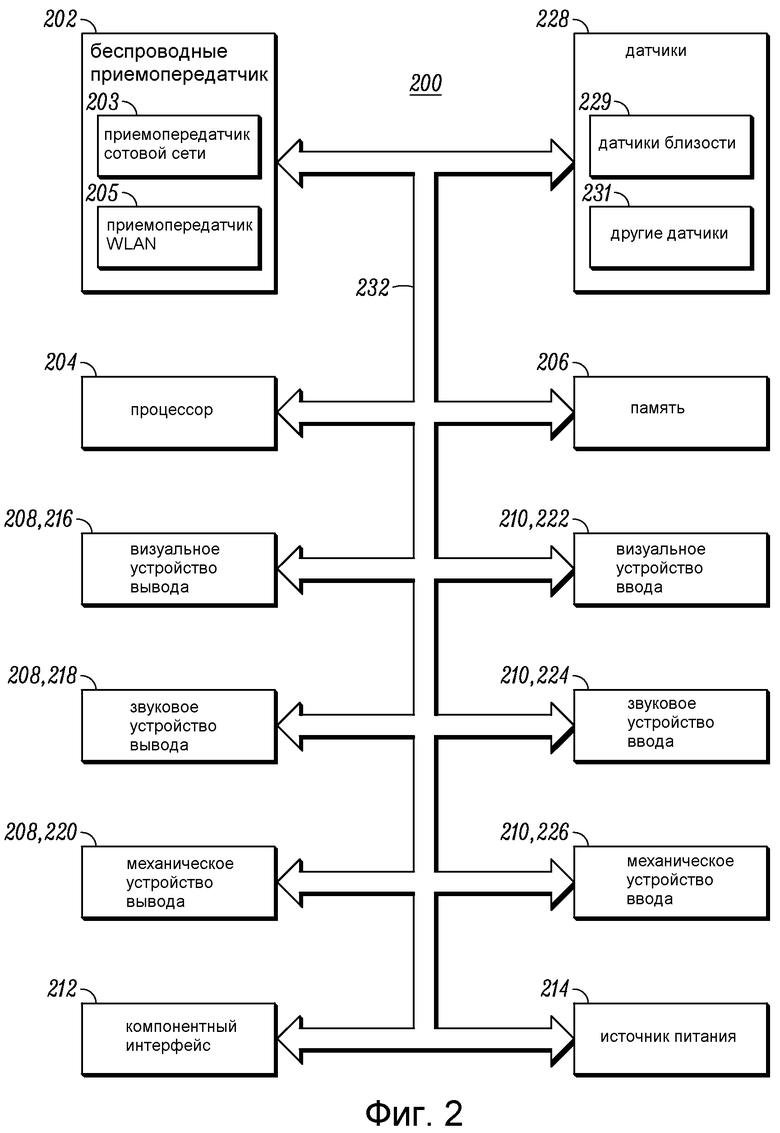
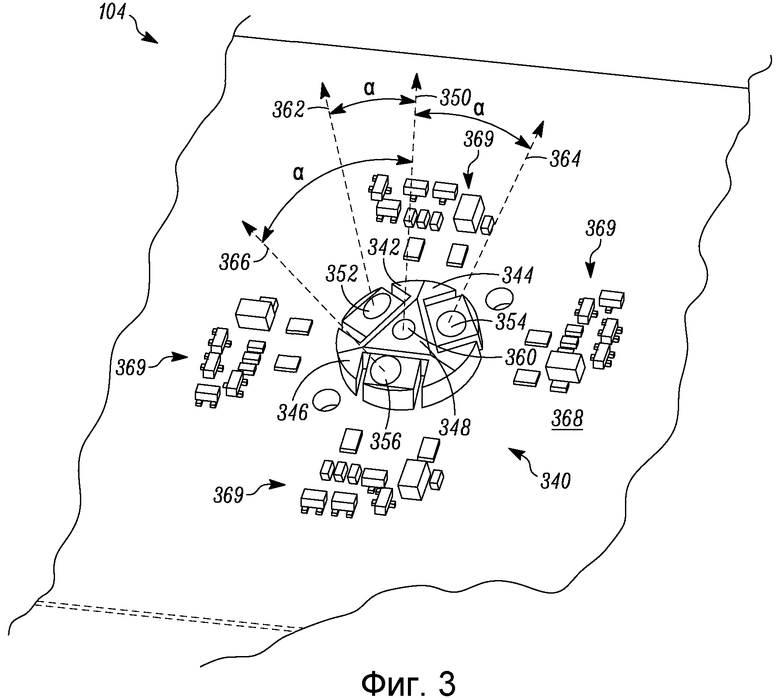
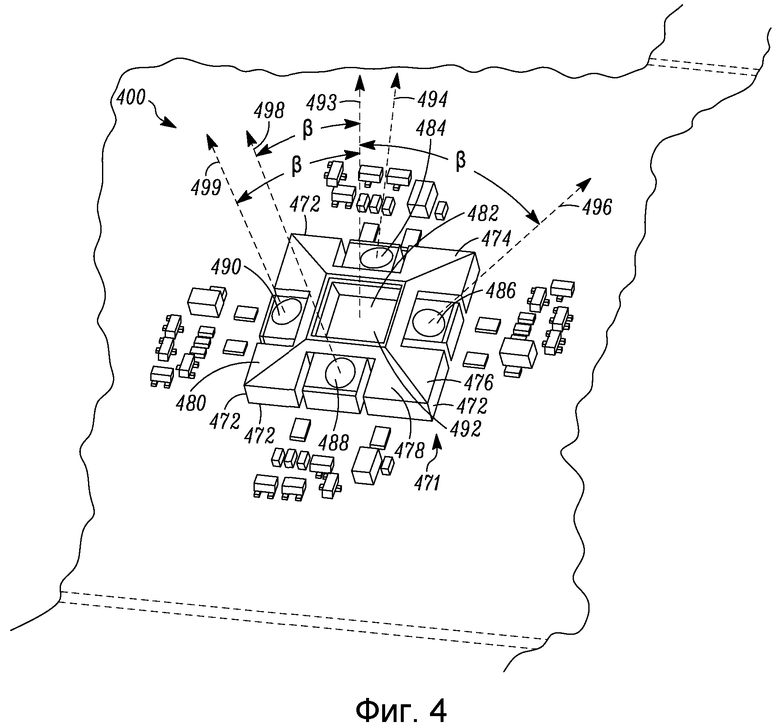
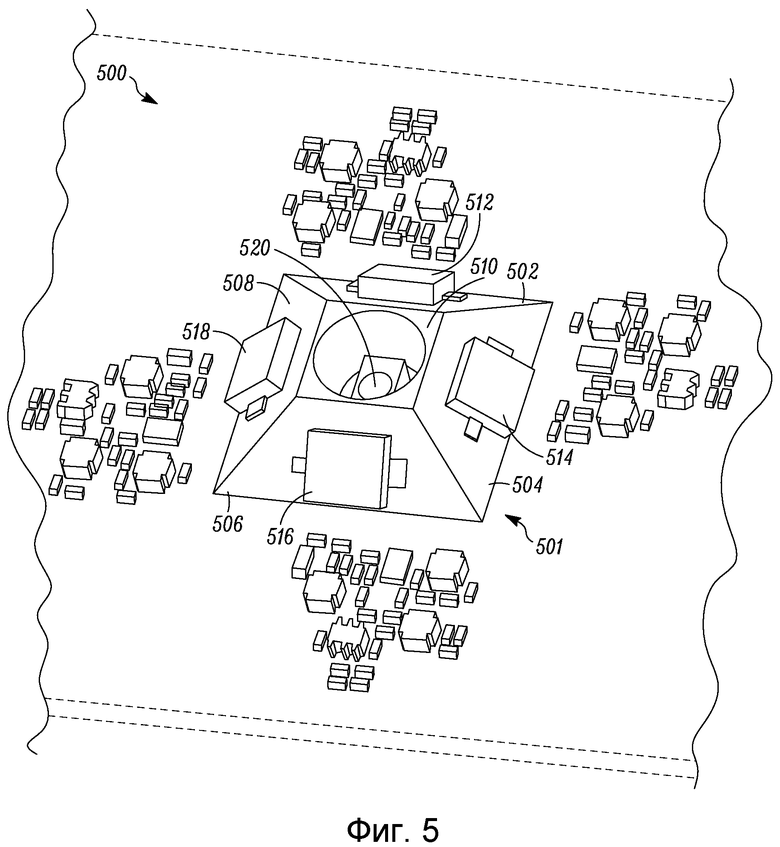
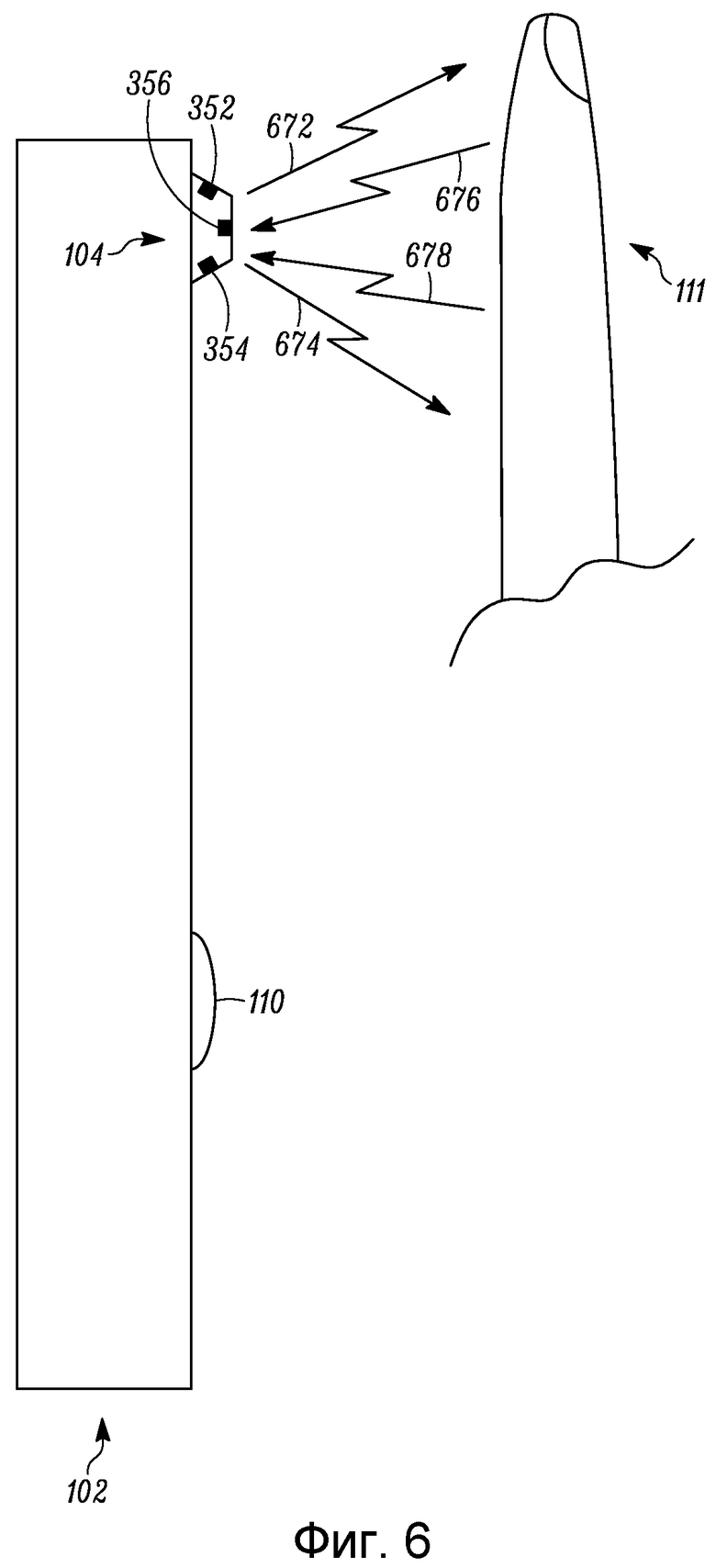
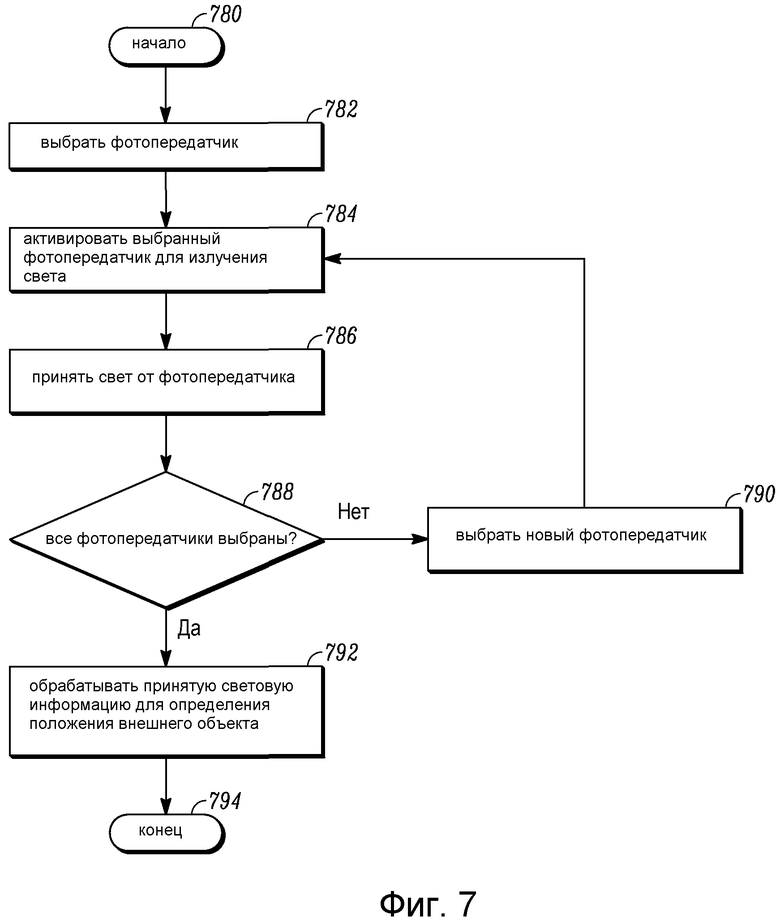
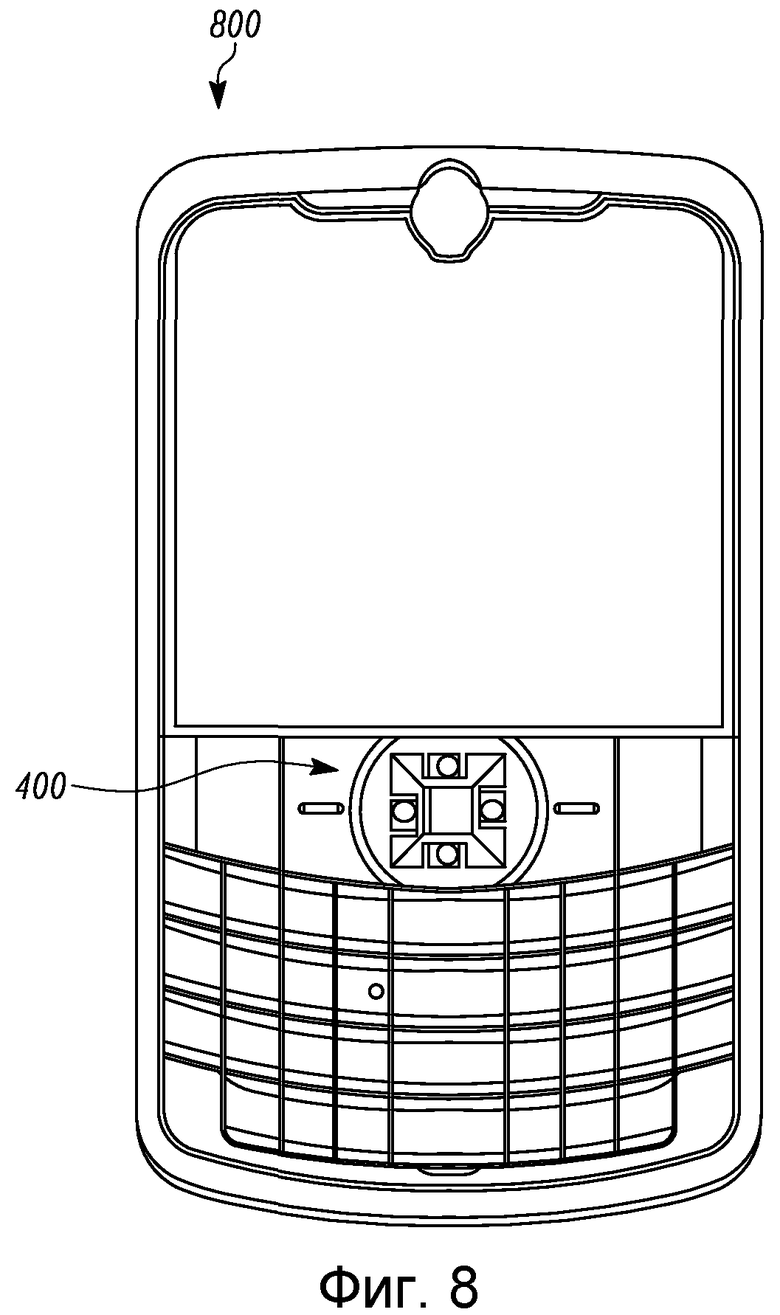
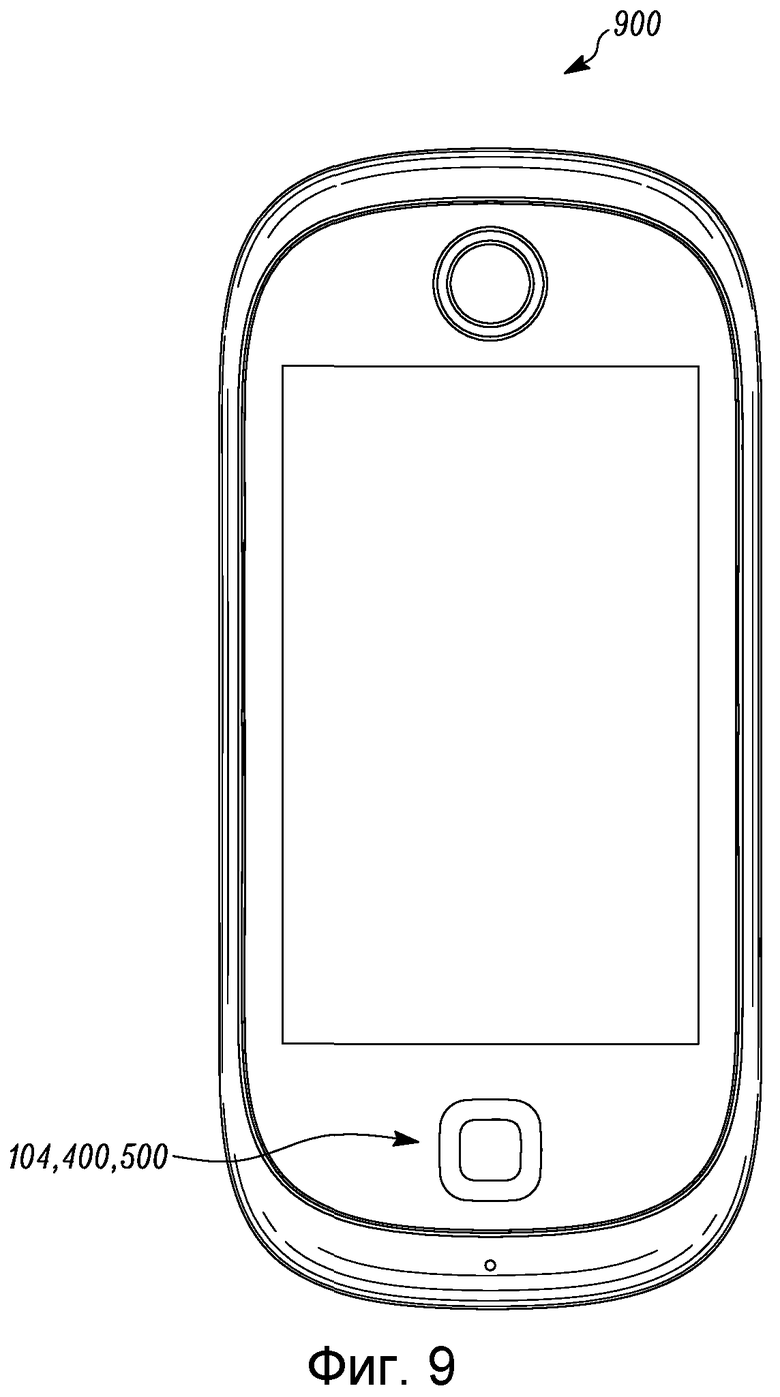
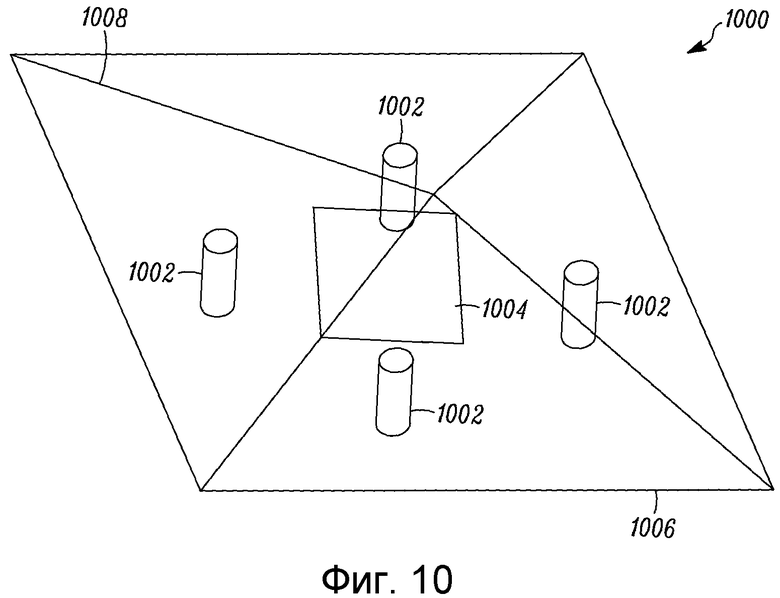
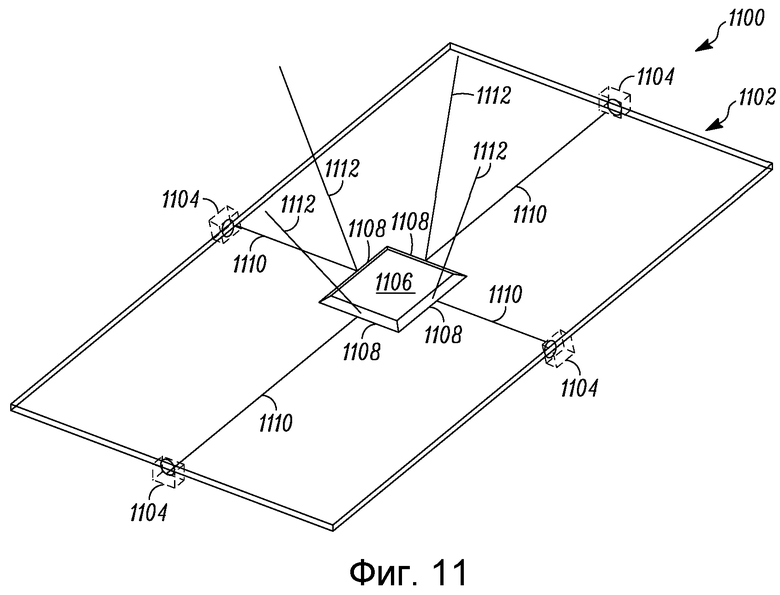
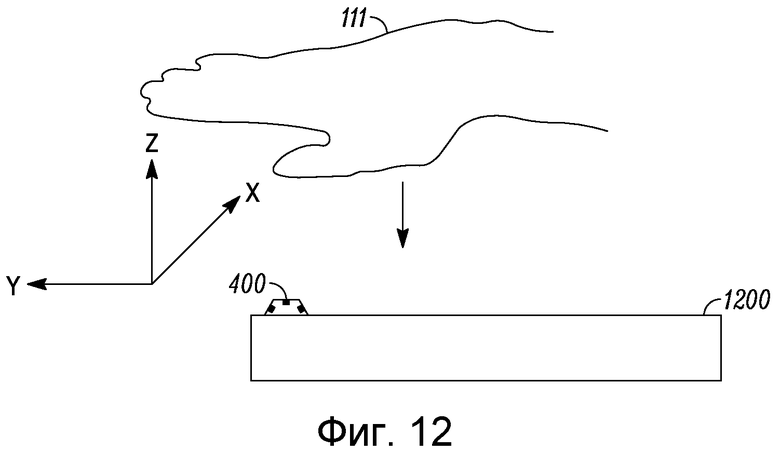
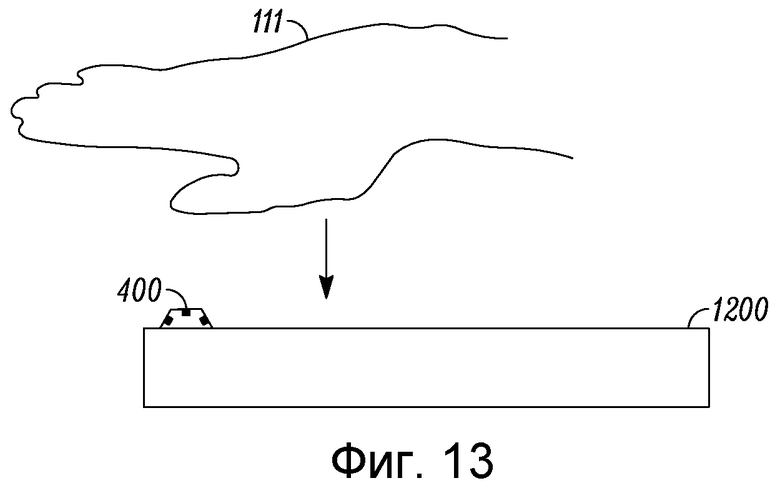
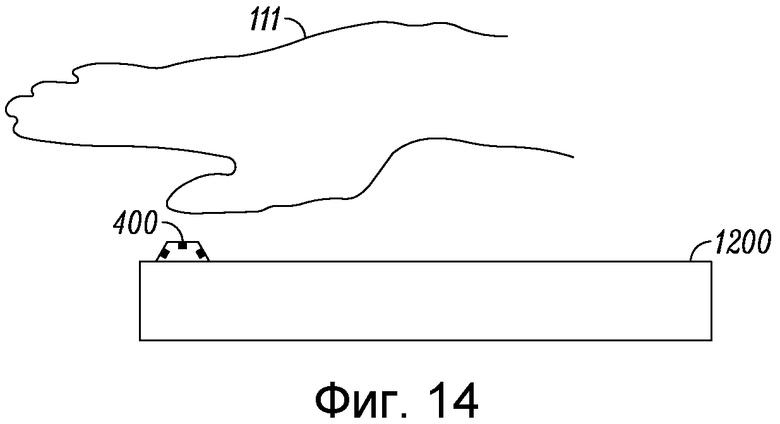
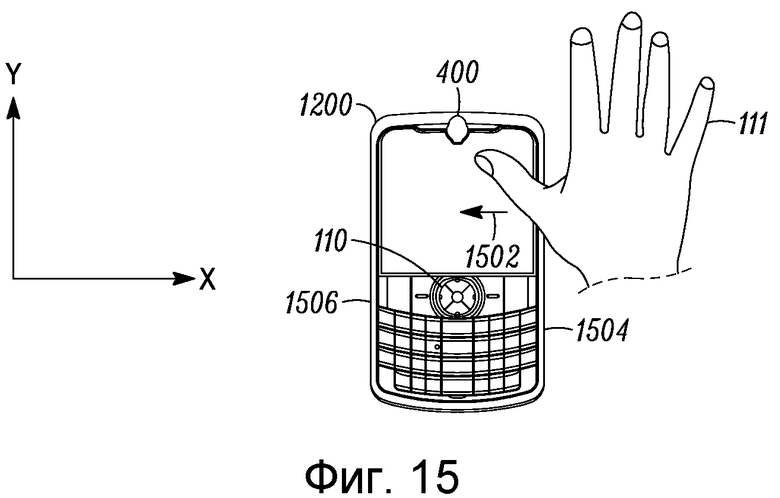
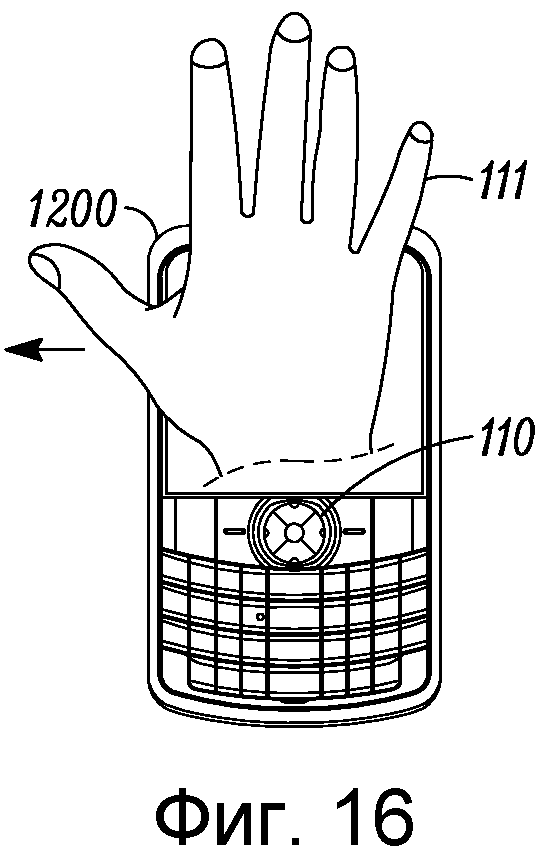
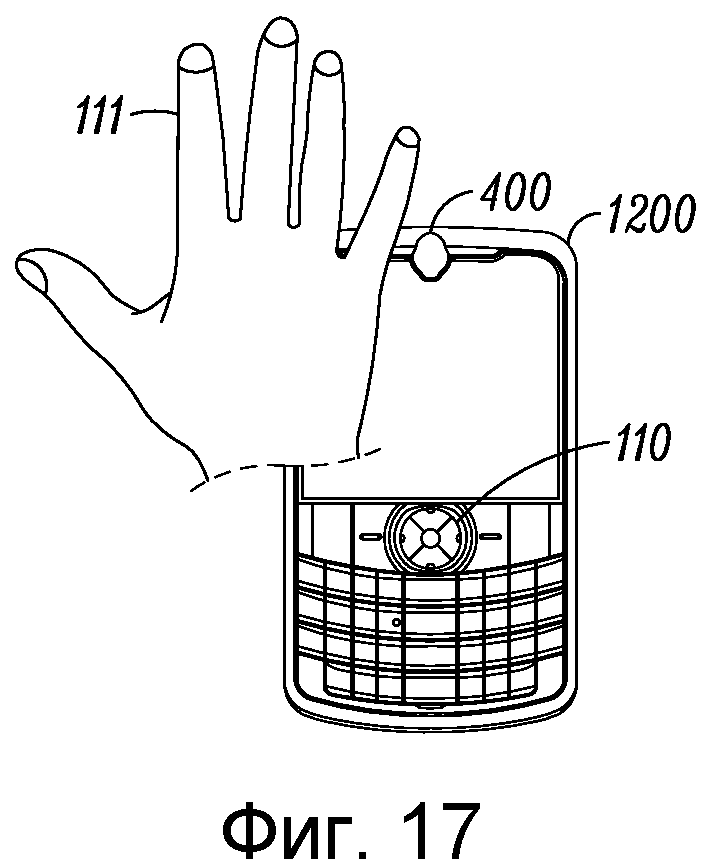
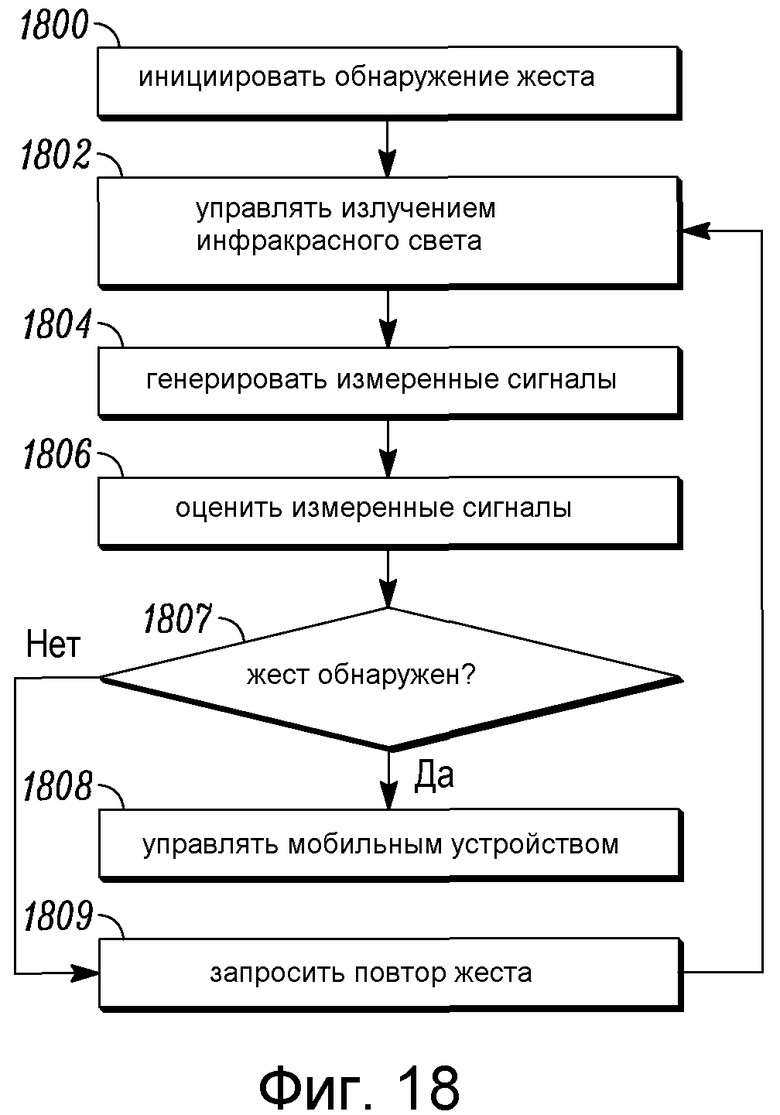
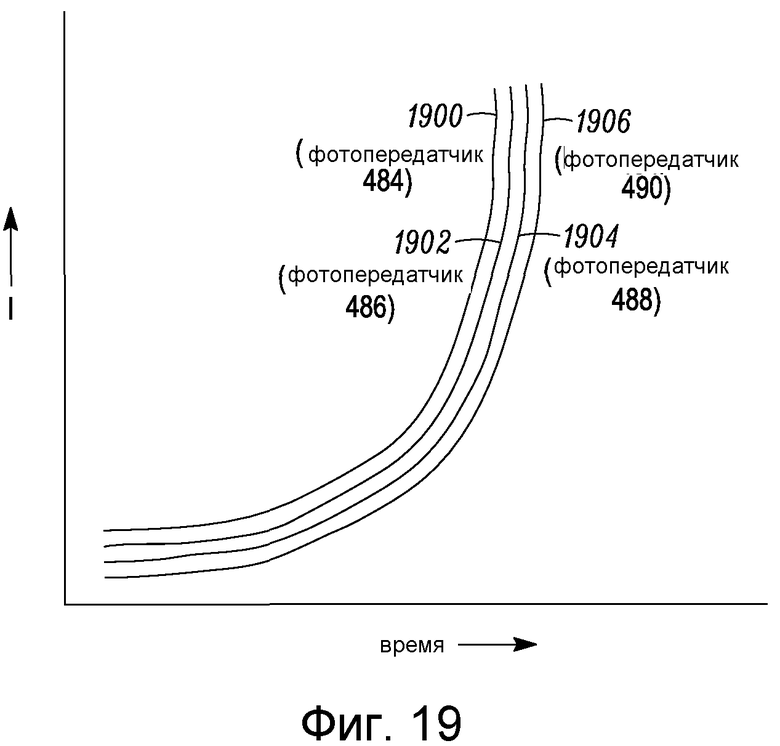
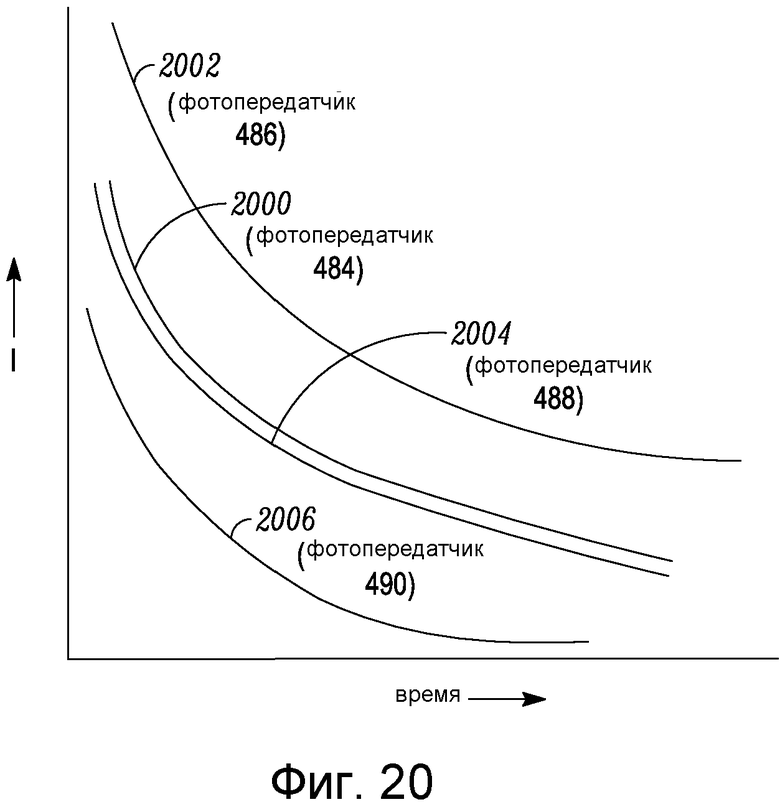
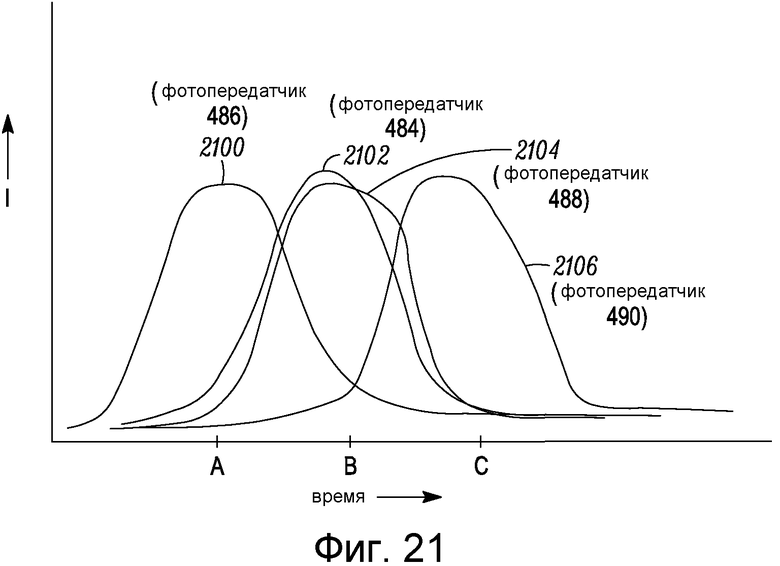
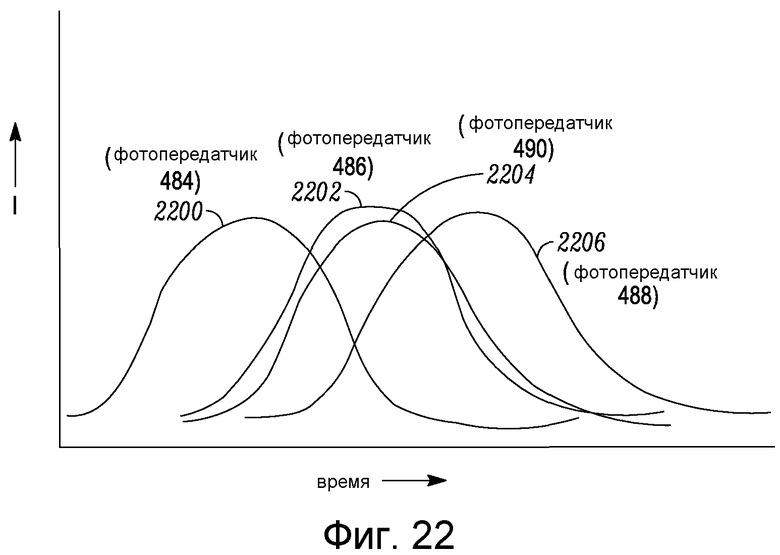
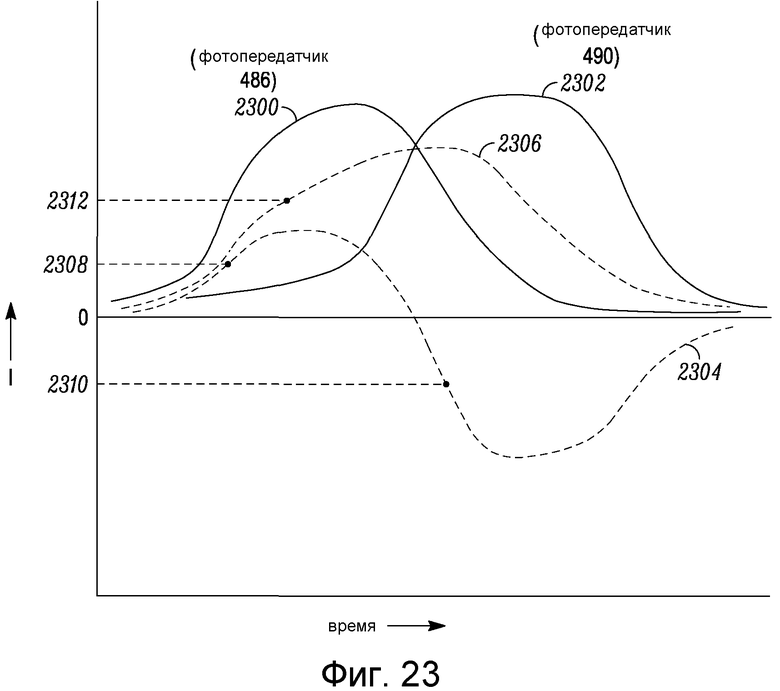
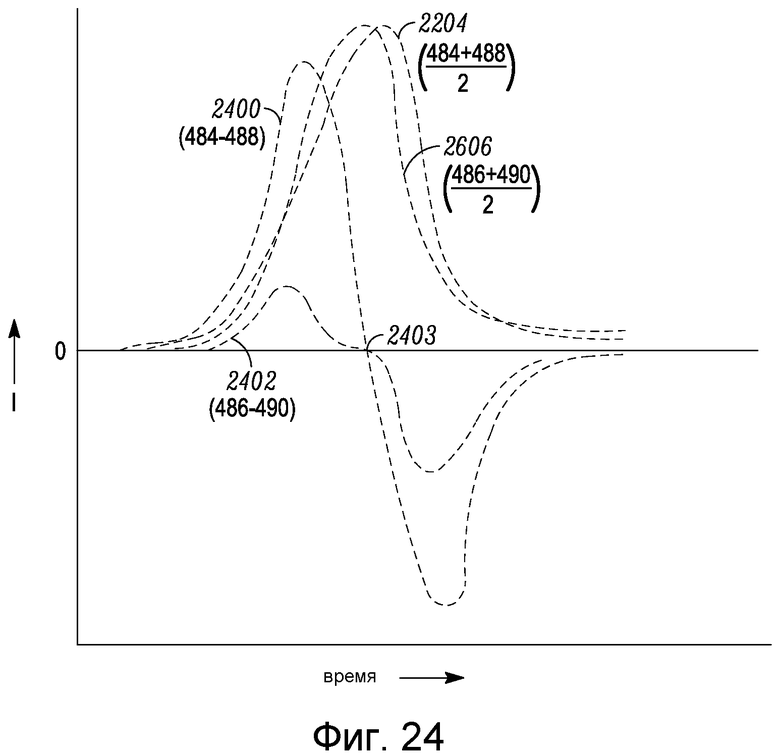
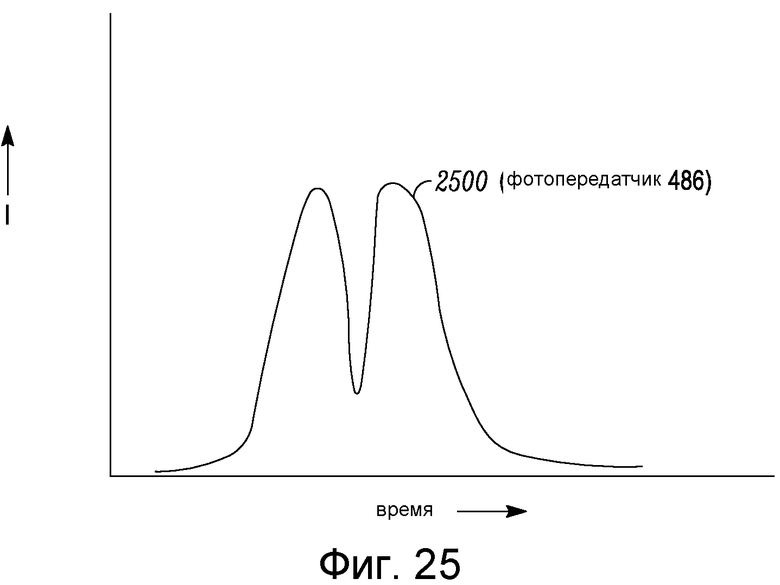
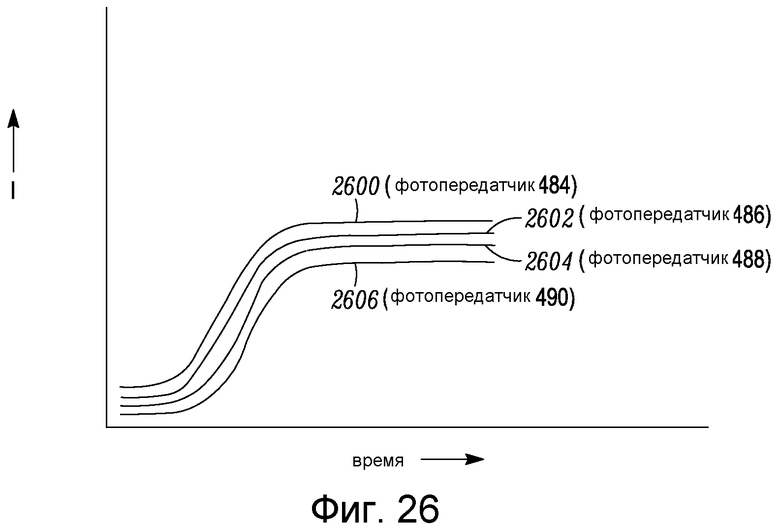
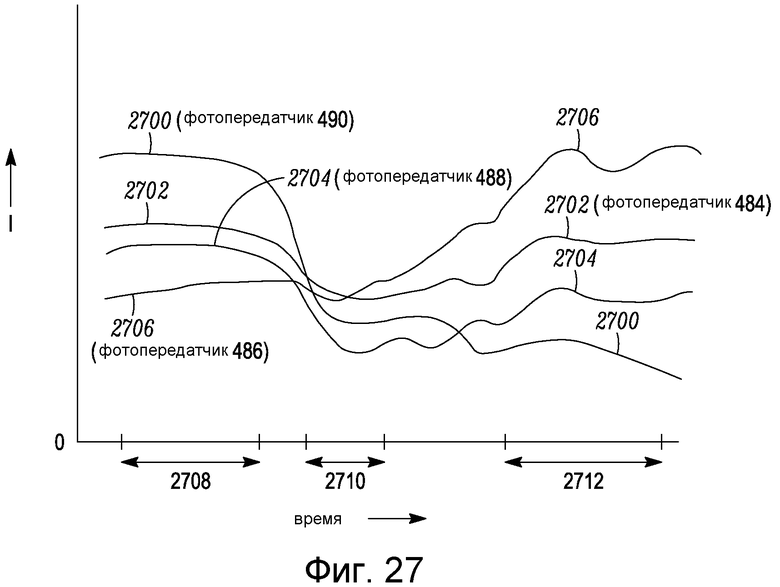
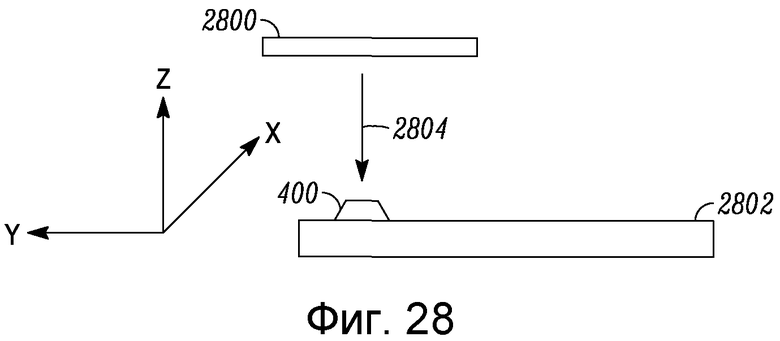
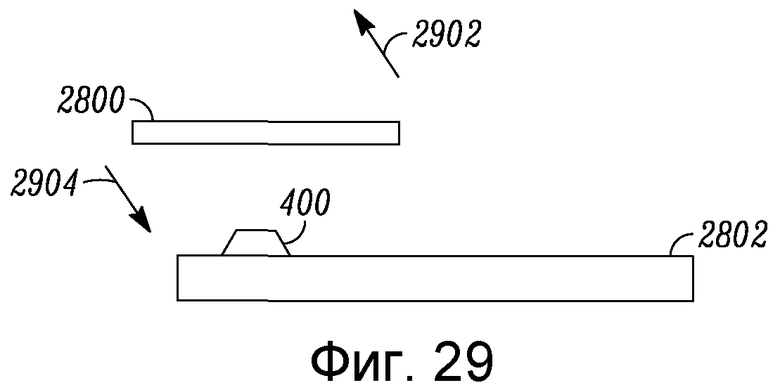
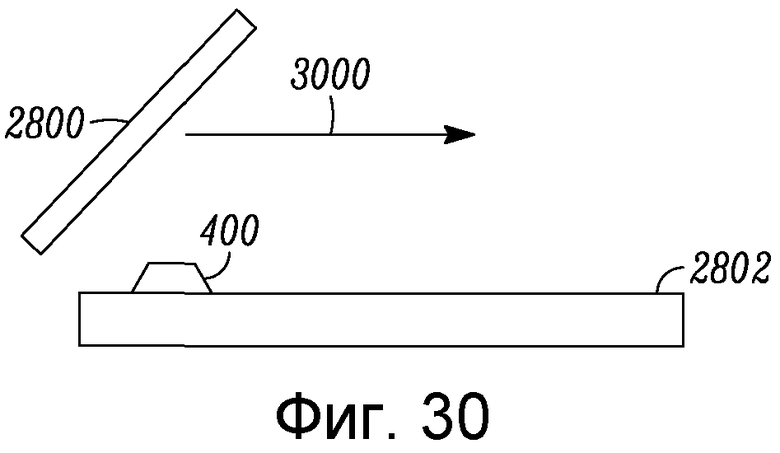
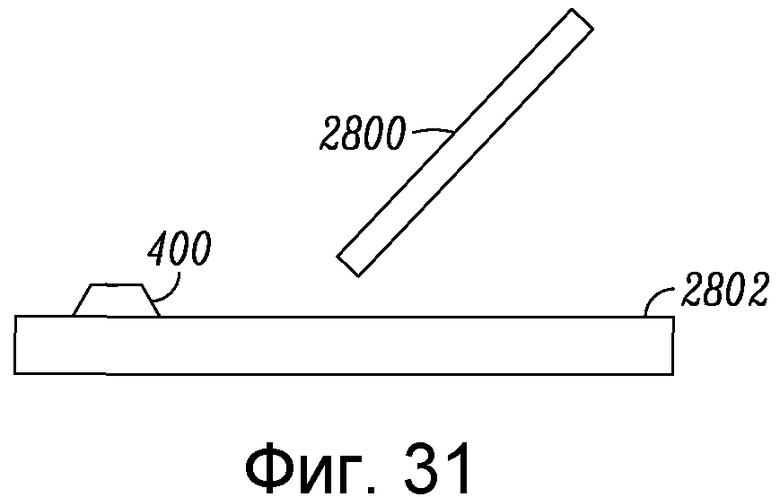
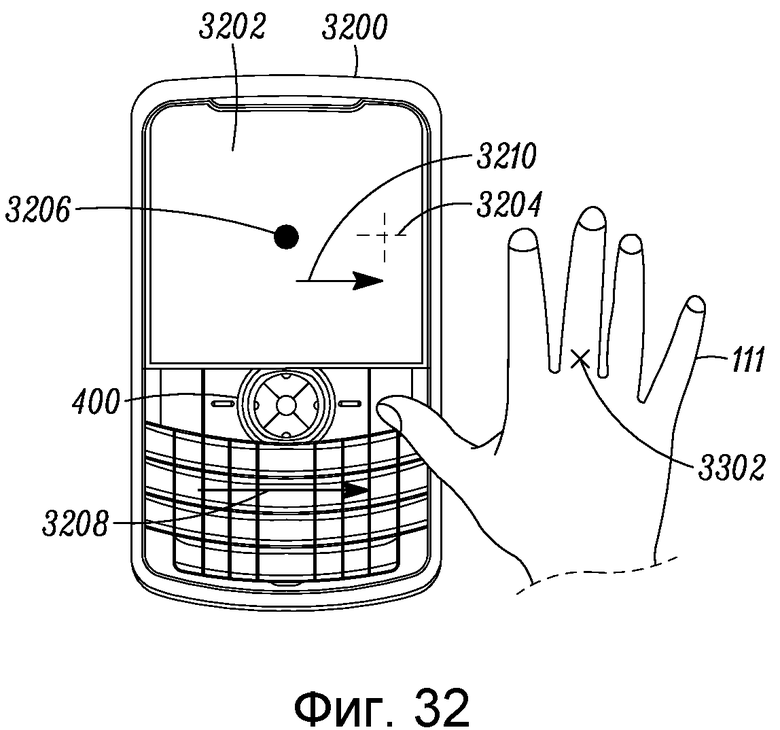
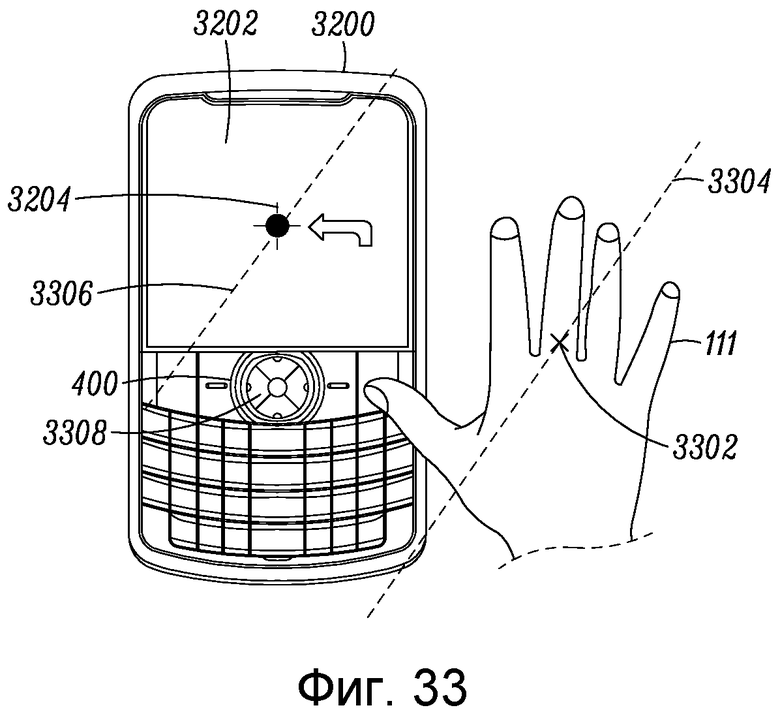
Изобретение относится к электронным устройствам. Технический результат заключается в повышении точности определения позиции физических объектов, находящихся вне мобильных устройств. Устройство содержит, по меньшей мере, один фотоприемник и множество фотопередатчиков для излучения инфракрасного света под разными углами из электронного устройства, излучение инфракрасного света каждым из фотопередатчиков управляется в течение каждого из множества периодов времени при перемещении внешнего объекта в шаблоне, который смещен относительно в целом центрированной позиции по отношению к узлу восприятия, и генерируются измеренные сигналы, которые оцениваются для идентификации шаблона перемещения объекта и для обнаружения опорного положения смещения. 2 н. и 17 з.п. ф-лы, 33 ил.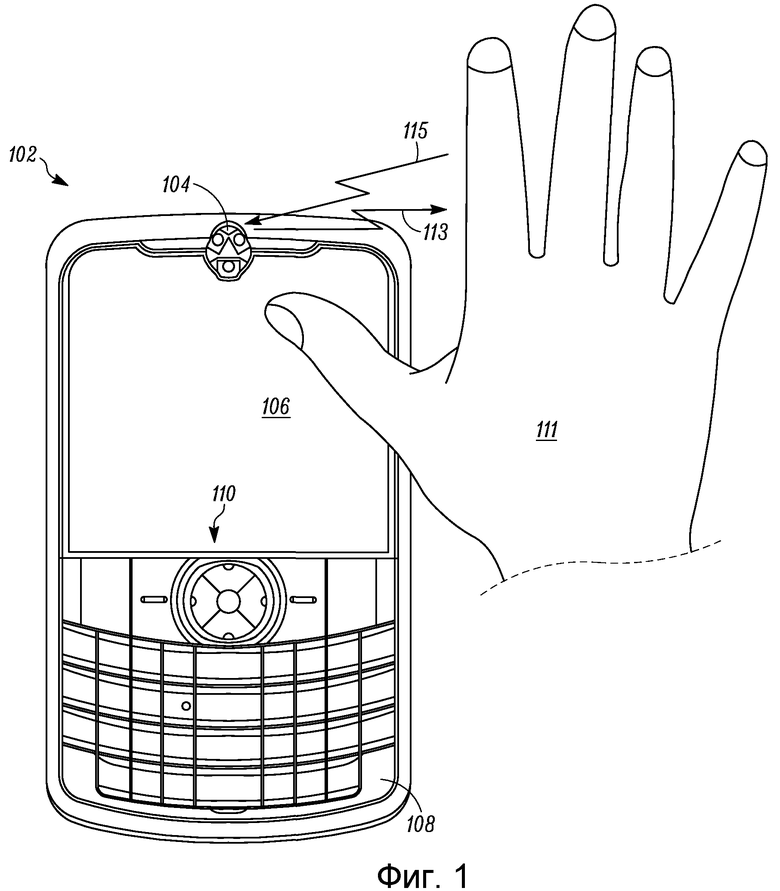
1. Способ управления электронным устройством, причем способ содержит этапы, на которых:
обеспечивают, в качестве части упомянутого электронного устройства, экран дисплея для отображения контента и узел восприятия, включающий в себя, по меньшей мере, один фотоприемник и множество фотопередатчиков, причем каждый фотопередатчик расположен так, чтобы излучать инфракрасный свет из упомянутого электронного устройства вдоль соответствующей центральной оси передачи, причем каждая центральная ось передачи ориентирована в направлении, отличном относительно других,
управляют излучением инфракрасного света каждого из фотопередатчиков в течение каждого из множества периодов времени при перемещении внешнего объекта в первом указанном шаблоне перемещения, который смещен относительно в целом центрированной позиции по отношению к узлу восприятия,
для каждого из фотопередатчиков и для каждого из множества периодов времени, генерируют соответствующий измеренный сигнал, указывающий соответствующее количество инфракрасного света, исходящего из этого фотопередатчика в течение этого периода времени и отраженного внешним объектом до приема фотоприемником,
оценивают измеренные сигналы для идентификации первого указанного шаблона перемещения объекта и для обнаружения опорного положения смещения, соответствующего концу первого указанного шаблона перемещения объекта,
осуществляют операцию центрирования в ответ на идентификацию первого указанного шаблона перемещения, причем операция центрирования перемещает индикатор в заранее определенное опорное положение на экране дисплея, причем заранее определенное опорное положение затем связывается с опорным положением смещения, и
последовательно управляют последующими положениями индикатора на экране дисплея в соответствии с дополнительными определенными положениями объекта относительно опорного положения смещения.
2. Способ по п.1, в котором на этапе последовательного управления
оценивают измеренные сигналы для определения, для каждого из группы периодов времени, соответствующего положения объекта относительно узла восприятия и
управляют последующими положениями индикатора на экране дисплея в соответствии с соответствующими определенными положениями.
3. Способ по п.1, в котором на этапе оценивания дополнительно
оценивают измеренные сигналы для обнаружения опорной ориентации объекта на конце первого указанного шаблона перемещения.
4. Способ по п.3, в котором на этапе последовательного управления дополнительно
определяют последующие ориентации объекта относительно опорной ориентации.
5. Способ по п.4, в котором на этапе последовательного управления дополнительно
управляют ориентациями индикатора на экране дисплея в соответствии с последующими ориентациями объекта относительно опорной ориентации.
6. Способ по п.1, в котором первый указанный шаблон перемещения включает в себя скользящий жест, сопровождаемый парящим жестом.
7. Способ по п.6, в котором опорным положением смещения является положение, соответствующее объекту в ходе выполнения парящего жеста.
8. Способ по п.6, в котором опорной ориентацией является ориентация, соответствующая объекту в ходе выполнения парящего жеста.
9. Способ по п.1, в котором на этапе последовательного управления
определяют перемещение объекта во втором шаблоне перемещения в смещенном объеме, причем второй шаблон перемещения включает в себя, по меньшей мере, один из жеста приближения/отдаления, скользящего жеста и жеста наклона.
10. Способ по п.9, в котором смещенный объем не включает в себя трехмерный объем, образованный площадью на экране дисплея и вектором, проходящим в направлении нормали к экрану дисплея.
11. Способ управления электронным устройством, причем способ содержит этапы, на которых:
обеспечивают, в качестве части упомянутого электронного устройства, экран дисплея для отображения контента и узел восприятия, включающий в себя, по меньшей мере, один фотопередатчик и множество фотоприемников, причем фотопередатчик расположен так, чтобы излучать инфракрасный свет из электронного устройства вдоль центральной оси передачи, и каждый фотоприемник расположен так, чтобы принимать инфракрасный свет вдоль соответствующей центральной оси приема, причем каждая центральная ось приема ориентирована в направлении, отличном относительно других,
управляют излучением инфракрасного света фотопередатчиком в течение каждого из множества периодов времени при перемещении внешнего объекта в первом указанном шаблоне перемещения, причем конец первого указанного шаблона перемещения смещен относительно в целом центрированной позиции по отношению к узлу восприятия,
для каждого из множества фотоприемников и для каждого из множества периодов времени, генерируют соответствующий измеренный сигнал, указывающий соответствующее количество инфракрасного света, исходящего из фотопередатчика в течение соответствующего периода времени и отраженного внешним объектом до приема соответствующим фотоприемником,
оценивают измеренные сигналы для идентификации первого указанного шаблона перемещения объекта и для обнаружения опорного положения смещения, соответствующего концу первого указанного шаблона перемещения,
осуществляют операцию центрирования в ответ на идентификацию первого указанного шаблона перемещения, причем операция центрирования перемещает индикатор в заранее определенное опорное положение на экране дисплея, причем заранее определенное опорное положение затем связывается с опорным положением смещения, и
последовательно управляют последующими положениями индикатора на экране дисплея в соответствии с дополнительными определенными положениями объекта относительно опорного положения смещения.
12. Способ по п.11, в котором на этапе последовательного управления
оценивают измеренные сигналы для определения, для каждого из группы периодов времени, соответствующего положения объекта относительно узла восприятия и
управляют последующими положениями индикатора на экране дисплея в соответствии с соответствующими определенными положениями.
13. Способ по п.11, в котором на этапе оценивания дополнительно
оценивают измеренные сигналы для определения опорной ориентации объекта относительно узла восприятия.
14. Способ по п.13, в котором на этапе последовательного управления дополнительно
управляют ориентациями индикатора на экране дисплея в соответствии с последующими ориентациями объекта относительно опорной ориентации.
15. Способ по п.11, в котором первый указанный шаблон перемещения включает в себя скользящий жест, сопровождаемый парящим жестом.
16. Способ по п.15, в котором опорным положением смещения является положение, соответствующее объекту в ходе выполнения парящего жеста.
17. Способ по п.11, в котором на этапе последовательного управления
определяют перемещение объекта во втором шаблоне перемещения в смещенном объеме, причем второй шаблон перемещения включает в себя, по меньшей мере, один из жеста приближения/отдаления, скользящего жеста и жеста наклона.
18. Способ по п.17, в котором смещенный объем не включает в себя первый трехмерный объем, образованный площадью на экране дисплея и вектором, проходящим в направлении нормали к экрану дисплея.
19. Способ по п.11, дополнительно содержащий этапы, на которых
обнаруживают третий шаблон перемещения и
управляют электронным устройством на основании третьего шаблона перемещения.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 7380716 B2, 03.06.2008 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ КАСАНИЯ ОПТОЭЛЕКТРОННОГО СЕНСОРНОГО ЭКРАНА С ПОВЫШЕННЫМ РАЗРЕШЕНИЕМ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2007 |
|
RU2353002C2 |

