Область техники, к которой относится группа изобретений
[0001] Настоящая группа изобретений относится к устройству помощи при вождении и способу обнаружения транспортного средства рядом с ним.
Уровень техники
[0002] Патентный документ 1 предлагает устройство помощи при вождении, которое обнаруживает пешехода посредством извлечения пары областей объекта, совмещаемой в горизонтальном направлении, в качестве левой области и правой области способом, соответствующим ногам пешехода, и посредством обнаружения изменения в яркости в областях.
Список библиографических ссылок
Патентная литература
[0003] Патентный документ 1. Выложенная публикация заявки на патент Японии номер 2010-205087.
Сущность изобретения
Техническая задача
[0004] Тем не менее, устройство помощи при вождении, раскрытое в патентном документе 1, не может определять, находится ли объект на соседней полосе движения или на следующей соседней полосе движения, которая является соседней с соседней полосой движения, посредством обнаружения изменения в яркости, когда обнаруженный объект светит. Следовательно, может снижаться точность обнаружения находящегося рядом транспортного средства (включая мотоцикл или велосипед).
[0005] Настоящее изобретение, которое осуществлено для того, чтобы разрешать традиционные проблемы, описанные выше, направлено на предоставление устройства помощи при вождении, которое позволяет повышать точность обнаружения находящегося рядом транспортного средства, и способа обнаружения транспортного средства рядом с ним.
Решение задачи
[0006] В устройстве помощи при вождении согласно варианту осуществления настоящего изобретения, детектор областей отражения от поверхности дороги определяет из области захвата изображений позади сбоку от собственного транспортного средства, в которой изображения захватываются посредством блока захвата изображений, область с высокой яркостью, в которой яркость равна или выше предварительно определенного порогового значения. Помимо этого, детектор яркости в предварительно определенной позиции определяет яркость в позиции, отделенной от собственного транспортного средства на предварительно определенное расстояние. Позиция, отделенная от собственного транспортного средства на предварительно определенное расстояние, находится в прямолинейном направлении, соединяющем позицию вышеуказанной области с высокой яркостью и блок захвата изображений в состоянии просмотра транспортного средства сверху. Кроме того, детектор разности яркости вычисляет разность между значением яркости области с высокой яркостью и значением яркости в позиции, отделенной от собственного транспортного средства на предварительно определенное расстояние, и детектор находящихся рядом транспортных средств обнаруживает находящееся рядом транспортное средство из разности яркости.
Преимущества изобретения
[0007] Согласно настоящему изобретению, поверхность дороги, отражающая свет другого транспортного средства на соседней полосе движения или свет другого транспортного средства на следующей соседней полосе движения, как предполагается, обнаруживается посредством обнаружения, из области захвата изображений, области с высокой яркостью, в которой яркость равна или выше предварительно определенного порогового значения. Помимо этого, яркость определяется в позиции, расположенной в прямолинейном направлении, соединяющем позицию области с высокой яркостью и блока захвата изображений, и отделенной от собственного транспортного средства на предварительно определенное расстояние. Соответственно, если область с высокой яркостью является поверхностью дороги, отражающей свет другого транспортного средства, появляется возможность обнаружить позицию света другого транспортного средства посредством обнаружения позиции, отделенной на предварительно определенное расстояние, и передачи отражающей поверхности дороги. Затем, определяется разность между значением яркости области с высокой яркостью и значением яркости позиции, отделенной на предварительно определенное расстояние, и обнаруживается находящееся рядом транспортное средство в области захвата изображений на основе определенной разности значений яркости. Соответственно, если область с высокой яркостью является поверхностью дороги, отражающей свет другого транспортного средства, разность значений яркости становится большей, поскольку существует еще более яркий участок вследствие наличия света другого транспортного средства в позиции, отделенной на предварительно определенное расстояние, в противном случае разность значений яркости имеет тенденцию снижаться. Следовательно, позиция света другого транспортного средства может быть определена из разности значений яркости, что позволяет повышать точность обнаружения находящегося рядом транспортного средства.
Краткое описание чертежей
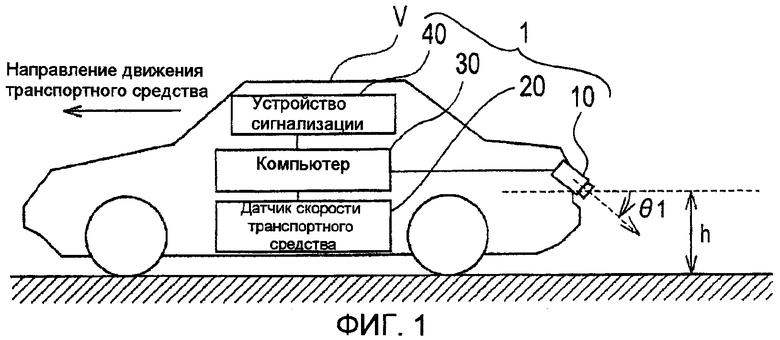
[0008] Фиг. 1 является схематичным чертежом конфигурации устройства помощи при вождении согласно первому варианту осуществления, показывающим пример, в котором устройство помощи при вождении монтируется на транспортном средстве.
Фиг. 2 является видом сверху, показывающим состояние движения транспортного средства, показанного на фиг. 1.
Фиг. 3 является блок-схемой, показывающей подробности компьютера, показанного на фиг. 1.
Фиг. 4 показывает подробности детектора яркости в предварительно определенной позиции, показанного на фиг. 3, при этом фиг. 4(a) показывает изображение, захваченное посредством камеры, а фиг. 4(b) показывает позицию и значение яркости пикселя выше.
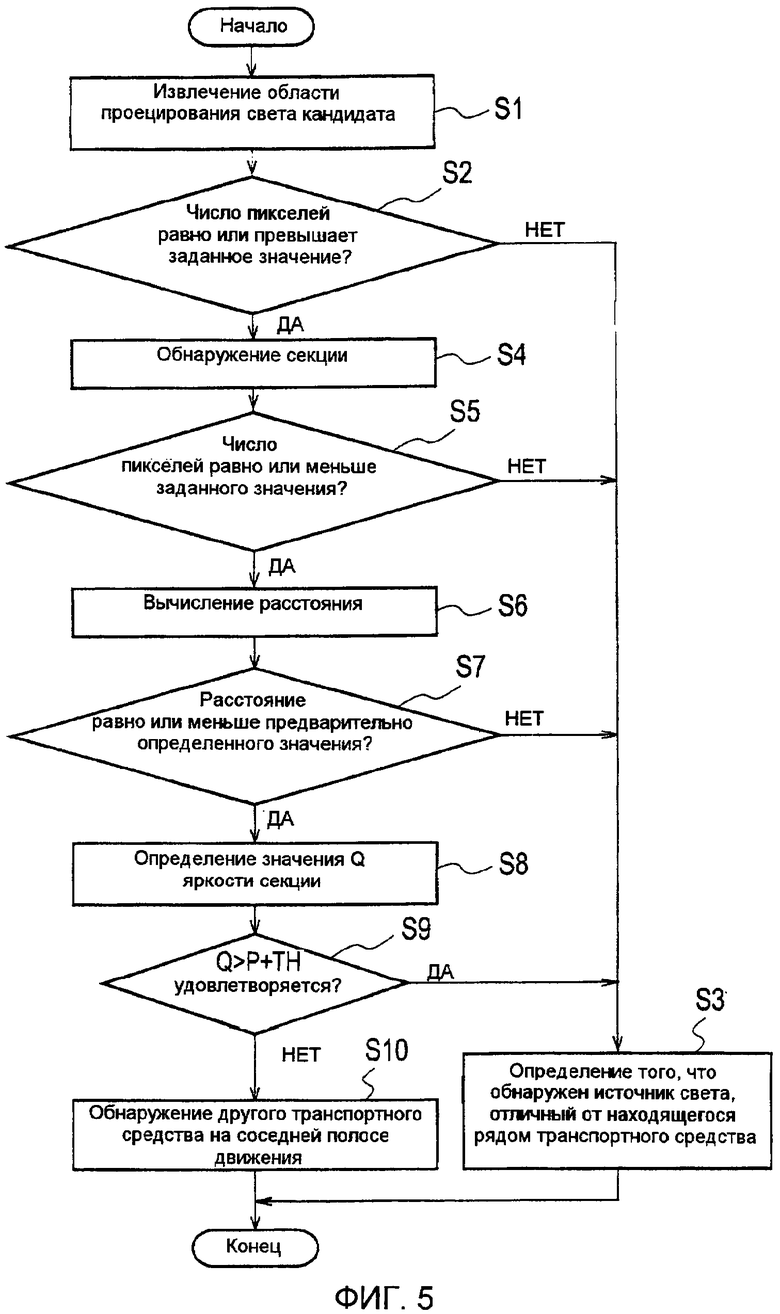
Фиг. 5 является блок-схемой последовательности операций способа, показывающей способ обнаружения находящегося рядом транспортного средства для устройства помощи при вождении согласно настоящему варианту осуществления, и описывает подробности обработки детектора яркости в предварительно определенной позиции и блока определения причин, показанного на фиг. 3.
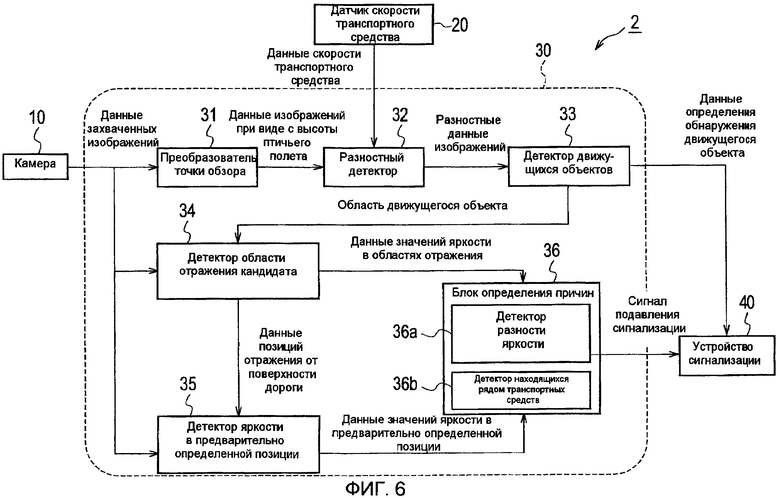
Фиг. 6 является блок-схемой, показывающей подробности компьютера устройства помощи при вождении согласно второму варианту осуществления.
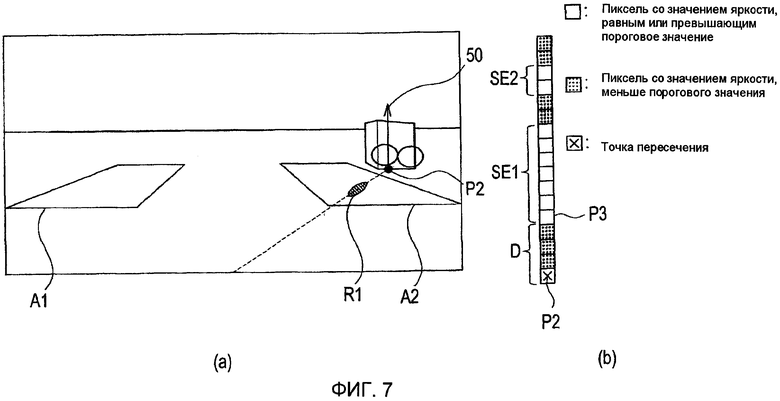
Фиг. 7 показывает подробности детектора яркости в предварительно определенной позиции, показанного на фиг. 6, при этом фиг. 7(a) показывает изображение, захваченное посредством камеры, а фиг. 7(b) показывает позицию и значение яркости пикселя выше.
Фиг. 8 является блок-схемой последовательности операций способа, показывающей способ обнаружения находящегося рядом транспортного средства для устройства помощи при вождении согласно настоящему варианту осуществления, и описывает подробности обработки детектора яркости в предварительно определенной позиции и блока определения причин, показанного на фиг. 6.
Фиг. 9 является блок-схемой, показывающей подробности компьютера устройства помощи при вождении согласно третьему варианту осуществления.
Подробное описание вариантов осуществления
[0009] Первый вариант осуществления
Сначала описывается первый вариант осуществления настоящего изобретения со ссылкой на чертежи. Фиг. 1 является схематичным чертежом конфигурации устройства 1 помощи при вождении согласно настоящему варианту осуществления, показывающей пример, в котором устройство 1 помощи при вождении монтируется на транспортном средстве V. Устройство 1 помощи при вождении, показанное на фиг. 1, которое предоставляет водителю собственного транспортного средства V различную информацию из результата захвата изображений около собственного транспортного средства V, включает в себя камеру 10 (блок/средство захвата изображений), датчик 20 скорости транспортного средства, компьютер 30 и устройство 40 сигнализации.
[0010] Камера 10, показанная на фиг. 1, присоединена в позиции с высотой h сзади собственного транспортного средства V, так что оптическая ось наклоняется вниз от горизонтальной линии на угол θ1. Камера 10 выполнена с возможностью захватывать изображения области обнаружения из этой позиции. Датчик 20 скорости транспортного средства определяет скорость движения собственного транспортного средства V, для чего может применяться, например, датчик, который определяет число оборотов колес. Компьютер 30 обнаруживает находящееся рядом транспортное средство (далее, другое транспортное средство проиллюстрировано в качестве примера находящегося рядом транспортного средства), находящееся около собственного транспортного средства V, на основе изображений, захваченных посредством камеры 10. Помимо этого, компьютер 30 настоящего варианта осуществления сконфигурирован таким образом, чтобы не обнаруживать ошибочно позицию другого транспортного средства вследствие света, к примеру, света другого транспортного средства. Устройство 40 сигнализации предупреждает водителя собственного транспортного средства V, если находящееся рядом транспортное средство, обнаруженное посредством компьютера 30, может входить в контакт с собственным транспортным средством V.
[0011] Фиг. 2 является видом сверху, показывающим состояние движения транспортного средства, показанного на фиг. 1. Как показано на фиг. 2, камера 10 может захватывать изображения позади сбоку от собственного транспортного средства V. На соседней полосе движения, которая является соседней с полосой движения, в которой движется собственное транспортное средство V, задаются области A1 и A2 обнаружения для обнаружения другого транспортного средства. Компьютер 30 определяет, существует ли или нет другое транспортное средство в областях A1 и A2 обнаружения. Соответственно, может быть определена возможность контакта, когда собственное транспортное средство V изменяет полосу движения.
[0012] Фиг. 3 является блок-схемой, показывающей подробности компьютера 30, показанного на фиг. 1. Следует отметить, что фиг. 3 также показывает камеру 10, датчик 20 скорости транспортного средства и устройство 40 сигнализации, чтобы прояснять взаимосвязь соединения.
[0013] Как показано на фиг. 3, компьютер 30 включает в себя преобразователь 31 точки обзора, разностный детектор 32, детектор 33 движущихся объектов (средство обнаружения движущихся объектов), детектор 34 области отражения кандидата (средство обнаружения области отражения кандидата), детектор 35 яркости в предварительно определенной позиции (средство обнаружения яркости в предварительно определенной позиции) и блок 36 определения причин. Следует отметить, что детектор 33 движущихся объектов и детектор 34 области отражения кандидата составляют блок задания области обнаружения (средство задания области обнаружения) в настоящем варианте осуществления. Помимо этого, детектор 35 яркости в предварительно определенной позиции составляет детектор светопроецирующего объекта кандидата (средство обнаружения светопроецирующего объекта кандидата) в настоящем варианте осуществления.
[0014] Преобразователь 31 точки обзора вводит данные захваченных изображений, полученные из захвата изображений посредством камеры 10, и преобразует точку обзора захваченных и входных данных изображений в данные изображений при виде с высоты птичьего полета в состоянии при наблюдении с высоты птичьего полета. Состояние при наблюдении с высоты птичьего полета означает, например, состояние при просмотре с точки обзора виртуальной камеры, направленной вертикально вниз с неба. Преобразование точки обзора выполняется способом, описанным, например, в публикации выложенной заявки на патент Японии № 2008-219063.
[0015] Разностный детектор 32 последовательно вводит данные изображений при виде с высоты птичьего полета, полученные из преобразования точки обзора посредством преобразователя 31 точки обзора, и совмещает данные изображений при виде с высоты птичьего полета в разные входные моменты времени на основе скорости движения собственного транспортного средства V, полученной из датчика 20 скорости транспортного средства. Помимо этого, разностный детектор 32, после совмещения данных изображений при виде с высоты птичьего полета в разные моменты времени, определяет разность между общими частями, чтобы формировать разностные данные изображений.
[0016] Детектор 33 движущихся объектов определяет, из разностных данных изображений, сформированных посредством разностного детектора 32, значение разности в позициях, соответствующих областям A1 и A2 обнаружения, и разделяет каждую из областей A1 и A2 обнаружения на область R1 движущегося объекта и область R2 поверхности дороги посредством обработки пороговых значений. Здесь, если обнаружена область R1 движущегося объекта, то другое транспортное средство может присутствовать в области, и детектор 33 движущихся объектов передает результат в устройство 40 сигнализации в качестве данных определения обнаружения движущегося объекта.
[0017] Здесь, область R1 движущегося объекта также обнаруживается, когда свет другого транспортного средства отражается от поверхности дороги. Другими словами, как показано на фиг. 2, предусмотрен случай, в котором другое транспортное средство присутствует на следующей соседней полосе движения, которая является соседней с соседней полосой движения, свет другого транспортного средства отражается от поверхности дороги соседней полосы движения, и отраженный свет обнаруживается в качестве области R1 движущегося объекта. В таком случае, выдача сигнала тревоги посредством устройства 40 сигнализации приводит к представлению ошибочной информации водителю собственного транспортного средства V. Следовательно, настоящий вариант осуществления выполнен с возможностью предотвращать эту ситуацию посредством следующей конфигурации.
[0018] Детектор 34 области отражения кандидата обнаруживает, в области захвата изображений, изображения которой захватываются посредством камеры 10, область с высокой яркостью, в которой яркость равна или выше предварительно определенного порогового значения. В частности, детектор 34 области отражения кандидата определяет область с высокой яркостью, в которой яркость равна или выше предварительно определенного порогового значения, только в области R1 движущегося объекта, обнаруженной посредством детектора 33 движущихся объектов.
[0019] При обнаружении области с высокой яркостью детектор 34 области отражения кандидата сначала задает предварительно определенное пороговое значение. Предварительно определенное пороговое значение определяется на основе угла θ2 между оптической осью камеры 10 и прямой линией, соединяющей область, которая должна быть обнаружена (т.е. область R1 движущегося объекта), и камеру 10, в состоянии просмотра собственного транспортного средства V сверху, и регулируется так, что оно выше для меньшего значения угла θ2. В общем, свет другого транспортного средства проецируется вперед. Следовательно, чем меньше угол θ2, тем большее количество света от другого транспортного средства должно быть захвачено посредством камеры 10. Следовательно, чем меньше угол θ2, тем выше регулируется предварительно определенное пороговое значение.
[0020] После задания предварительно определенного порогового значения детектор 34 области отражения кандидата задает область R1 движущегося объекта в качестве области R1 отражения кандидата при условии, что значение яркости области R1 движущегося объекта равно или выше предварительно определенного порогового значения. Следует отметить, что диапазон задания и скорость изменения порогового значения задаются экспериментально, причем задание здесь является только примерным, и таким образом задание порогового значения не ограничивается заданием, описанным выше.
[0021] Дополнительно, на практике, область R1 отражения кандидата может включать в себя, например, шум, который может исключаться посредством применения процесса открытия к двоичному изображению, выражающему область R1 отражения кандидата.
[0022] После задания области R1 отражения кандидата, как описано выше, детектор 34 области отражения кандидата определяет характерную точку P1 и характерное значение P яркости области R1 отражения кандидата. В этом случае, детектор 34 области отражения кандидата задает характерную точку P1 в качестве центроидной позиции области R1 отражения кандидата и задает характерное значение P яркости в качестве значения яркости центроидной позиции. Следует отметить, что характерная точка P1 и характерное значение P яркости не ограничены характерной точкой и характерным значением, описанными выше, и характерная точка P1 может быть точкой ближе к собственному транспортному средству в области R1 отражения кандидата, например, и характерное значение P яркости может быть статистическим значением, таким как среднее значение яркости или значение в 90 процентилей области R1 отражения кандидата.
[0023] Детектор 35 яркости в предварительно определенной позиции указывает область, имеющую значение яркости, равное или превышающее предварительно определенное значение, и число пикселей, равное или превышающее предварительно определенное число, в качестве области проецирования света кандидата (области, в которой следующее находящееся рядом транспортное средство рассматривается в качестве светопроецирующего объекта кандидата) из области следующей соседней полосы движения в некотором диапазоне направляющих углов около прямолинейного направления, соединяющего позицию области R1 отражения кандидата и камеру 10, в состоянии просмотра собственного транспортного средства V сверху. Здесь, хотя предварительно определенное число пикселей предположительно равно или превышает три в исходном захваченном изображении, это не является ограничением, и может задаваться значение, равное или превышающее три. Соответственно, проецирование света из источника света, такого как уличный фонарь, который не является транспортным средством, может сначала исключаться из области проецирования света кандидата. Затем, значения яркости сканируются и определяются вверх в реальном пространстве от характерной позиции в области проецирования света кандидата, чтобы определять, является ли или нет светопроецирующий объект кандидата следующим расположенным рядом транспортным средством.
[0024] В частности, детектор 35 яркости в предварительно определенной позиции обнаруживает позицию P2, которая является точкой пересечения между прямолинейным направлением, соединяющим позицию области R1 отражения кандидата и камеры 10, и фактически осевой линией следующей соседней полосы движения в состоянии просмотра собственного транспортного средства V сверху. Затем, детектор 35 яркости в предварительно определенной позиции сканирует и определяет значения яркости вверх в реальном пространстве от позиции P2.
[0025] Следует отметить, что причина задания позиции P2 в качестве точки пересечения фактически с осевой линией следующей соседней полосы движения состоит в том, что влияние ореола приводит к тому, что очень яркий участок выглядит больше своего истинного размера, и таким образом свет от передних фар другого транспортного средства на следующей соседней полосе движения может быть захвачен, даже если транспортное средство до некоторой степени смещается поперек, при этом фактически осевая линия следующей соседней полосы движения рассматривается качестве опорной.
[0026] Фиг. 4 показывает подробности детектора 35 яркости в предварительно определенной позиции, показанного на фиг. 3, при этом фиг. 4(a) показывает изображение, захваченное посредством камеры 10, а фиг. 4(b) показывает позицию P2 и значение яркости пикселя выше.
[0027] Как показано на фиг. 4, при определении позиции P2, детектор 35 яркости в предварительно определенной позиции сканирует и определяет значения яркости вверх от позиции P2. Другими словами, значения яркости получаются вдоль линии, указываемой посредством ссылочной позиции "50" по фиг. 4(a).
[0028] Кроме того, детектор 35 яркости в предварительно определенной позиции затем определяет секцию, имеющую последовательные значения яркости, равные или превышающие предварительно определенное значение. Как показано на фиг. 4(b), четвертый-десятый пиксели выше позиции P2 формируют секцию SE, имеющую последовательные значения яркости, равные или превышающие предварительно определенное значение.
[0029] Затем, блок 36 определения причин получает характерное значение Q яркости секции SE. Характерное значение Q яркости может быть значением яркости центроида (центра) либо может быть статистическим значением, аналогично характерному значению P яркости. Затем, блок 36 определения причин затем вычисляет разность значений яркости между характерными значениями P и Q яркости. Кроме того, если разность значений яркости превышает пороговое значение TH, блок 36 определения причин определяет, что область R1 отражения кандидата является отражением света другого транспортного средства от поверхности дороги на следующей соседней полосе движения. В противном случае, блок 36 определения причин определяет то, что область R1 отражения кандидата является светом от другого транспортного средства на соседней полосе движения, и полагает, что присутствует находящееся рядом транспортное средство.
[0030] Следует отметить, что блок 36 определения причин также выполняет следующий процесс, чтобы обнаруживать другое транспортное средство на соседней полосе движения с более высокой точностью. Блок 36 определения причин сначала определяет, равно ли или меньше либо нет число пикселей в секции SE заданного значения. Здесь, случай, в котором число пикселей в извлеченной секции SE, имеющей последовательные значения яркости, равно или меньше заданного значения, предлагает случай, в котором очень яркий участок является малым и меньше размера света другого транспортного средства на следующей соседней полосе движения. В этом случае, блок 36 определения причин определяет, что секция SE представляет собой не свет другого транспортного средства на следующей соседней полосе движения, а свет находящегося рядом транспортного средства, и обнаруживает находящееся рядом транспортное средство. Если, с другой стороны, число пикселей в секции SE не равно или не меньше заданного значения, то блок 36 определения причин определяет, что секция SE является светом другого транспортного средства на следующей соседней полосе движения. Другими словами, определяется, что область R1 отражения кандидата является отражением света другого транспортного средства от поверхности дороги на следующей соседней полосе движения.
[0031] Помимо этого, блок 36 определения причин получает расстояние D между самой низкой точкой P3 секции SE и позицией P2, определенной посредством детектора 35 яркости в предварительно определенной позиции. Блок 36 определения причин затем определяет, равно ли или меньше либо нет расстояние D предварительно определенного расстояния. Если расстояние равно или меньше предварительно определенного расстояния, то позиция является слишком низкой для света другого транспортного средства на следующей соседней полосе движения, и таким образом можно определить, что это не свет другого транспортного средства на следующей соседней полосе движения. Соответственно, блок 36 определения причин определяет, что секция SE является светом находящегося рядом транспортного средства, и обнаруживает находящееся рядом транспортное средство. Если, с другой стороны, расстояние D не равно или не меньше предварительно определенного расстояния, то блок 36 определения причин определяет, что секция SE является светом другого транспортного средства на следующей соседней полосе движения. Другими словами, определяется, что область R1 отражения кандидата является отражением света другого транспортного средства от поверхности дороги на следующей соседней полосе движения.
[0032] Обобщая вышеуказанное, устройство помощи при вождении согласно настоящему варианту осуществления предоставляет водителю различные фрагменты информации из результата захвата изображений около собственного транспортного средства и включает в себя: блок захвата изображений (камеру 10), смонтированный на собственном транспортном средстве, чтобы захватывать изображения позади сбоку от собственного транспортного средства; блок задания области обнаружения (детектор 33 движущихся объектов и детектор 34 области отражения кандидата), который задает область обнаружения для обнаружения, из данных изображений, захваченных посредством блока захвата изображений, наличия находящегося рядом транспортного средства на соседней полосе движения; детектор светопроецирующего объекта кандидата (детектор 35 яркости в предварительно определенной позиции), который обнаруживает светопроецирующий объект кандидата, который проецирует свет с яркостью, равной или превышающей предварительно определенное пороговое значение; блок определения причин (блок 36 определения причин), который определяет, существует ли или нет светопроецирующий объект кандидата, который указывает наличие находящегося рядом транспортного средства, в области обнаружения, заданной посредством блока задания области обнаружения; и поставщик информации (устройство 40 сигнализации), который предоставляет водителю информацию о наличии находящегося рядом транспортного средства, если посредством блока определения причин определено, что свет проецируется из находящегося рядом транспортного средства, при этом можно сказать, что блок определения причин определяет, проецируется ли или нет свет из находящегося рядом транспортного средства, посредством обнаружения позиции захвата изображения (соответствующей расстоянию D) светопроецирующего объекта кандидата, обнаруженного посредством детектора светопроецирующего объекта кандидата.
[0033] Далее описывается способ обнаружения находящегося рядом транспортного средства для устройства 1 помощи при вождении согласно настоящему варианту осуществления. Фиг. 5 является блок-схемой последовательности операций способа, показывающей способ обнаружения находящегося рядом транспортного средства для устройства 1 помощи при вождении согласно настоящему варианту осуществления, и описывает подробности обработки детектора 35 яркости в предварительно определенной позиции и блока 36 определения причин, показанного на фиг. 3.
[0034] Во-первых, как показано на фиг. 5, детектор 35 яркости в предварительно определенной позиции указывает область, имеющую значение яркости, равное или превышающее предварительно определенное значение, в качестве области RS проецирования света кандидата из области следующей соседней полосы движения в некотором диапазоне направляющих углов около прямолинейного направления, соединяющего позицию области R1 отражения кандидата и камеру 10, в состоянии просмотра собственного транспортного средства V сверху (S1).
[0035] Затем, детектор 35 яркости в предварительно определенной позиции определяет, равно ли или превышает либо нет число пикселей в области RS проецирования света кандидата предварительно определенное число (заданное значение пикселей) (S2). Затем, если определено, что число пикселей в области RS проецирования света кандидата не равно или не превышает заданное значение ("Нет" на S2), то очень вероятно, что область RS проецирования света кандидата является светом, проецируемым из источника света, такого как уличный фонарь, который не является транспортным средством, и таким образом блок 36 определения причин определяет область RS проецирования света кандидата в качестве области, в которой обнаружен источник света, отличный от находящегося рядом транспортного средства (S3). Если, с другой стороны, определяется, что число пикселей в области RS проецирования света кандидата равно или превышает заданное значение ("Да" на S2), то очень вероятно, что область RS проецирования света кандидата является светом, проецируемым из находящегося рядом транспортного средства или следующего находящегося рядом транспортного средства, и таким образом детектор 35 яркости в предварительно определенной позиции сканирует и определяет значения яркости вверх в реальном пространстве от характерной позиции в области RS проецирования света кандидата, чтобы определить, каким именно является транспортное средство.
[0036] Если, с другой стороны, определяется, что число пикселей в области RS проецирования света кандидата равно или превышает заданное значение ("Да" на S2), то очень вероятно, что область RS проецирования света кандидата является светом, проецируемым из находящегося рядом транспортного средства или следующего находящегося рядом транспортного средства, и таким образом детектор 35 яркости в предварительно определенной позиции сканирует и определяет значения яркости вверх в реальном пространстве от характерной позиции в области RS проецирования света кандидата, чтобы определить, каким именно является транспортное средство (S4). Другими словами, детектор 35 яркости в предварительно определенной позиции сканирует и определяет значения яркости вверх в реальном пространстве от позиции P2, указываемой в качестве характерной позиции в области RS проецирования света кандидата, и определяет секцию SE, имеющую значения яркости, равные или превышающие предварительно определенное значение (S4). Затем, блок 36 определения причин определяет, равно ли или меньше либо нет число пикселей в секции SE заданного значения (S5).
[0037] Если определено, что число пикселей в секции SE не равно или не меньше заданного значения ("Нет" на S5), то очень вероятно, что секция SE является светом другого транспортного средства на следующей соседней полосе движения, поскольку число пикселей превышает заданное значение, и таким образом блок 36 определения причин определяет, что область R1 отражения кандидата является отражением света другого транспортного средства на следующей соседней полосе движения (S3). После этого завершается процесс, показанный на фиг. 5.
[0038] Если, с другой стороны, определяется, что число пикселей в секции SE равно или меньше заданного значения ("Да" на S5), то блок 36 определения причин вычисляет расстояние D между самой низкой точкой P3 секции SE и указанной позицией P2 (S6). Затем, блок 36 определения причин определяет, равно ли или меньше либо нет расстояние D предварительно определенного расстояния (S7). Расстояние D может задаваться, без ограничения секцией SE, в качестве расстояния от камеры до источника света следующего находящегося рядом транспортного средства в направлении ширины транспортного средства. Помимо этого, может задаваться комбинация вышеуказанного. Например, если расстояние в направлении высоты (секция SE) задается фиксированно равным 70 см, то расстояние в направлении ширины транспортного средства может задаваться в диапазоне 1-4,5 м, например, или если расстояние в направлении ширины транспортного средства задается фиксированно равным 6,5 м, то расстояние в направлении высоты может задаваться в диапазоне 60-90 см. Тем не менее, эти значения являются только примерными и не ограничены вышеозначенными. Источник света следующего находящегося рядом транспортного средства, как предполагается, определяется посредством прохождения через этот этап.
[0039] Если определено, что расстояние D не равно или не меньше предварительно определенного расстояния ("Нет" на S7), то очень вероятно, что секция SE является светом другого транспортного средства на следующей соседней полосе движения, поскольку расстояние D составляет, по меньшей мере, не меньше расстояния до света другого транспортного средства, и таким образом блок 36 определения причин определяет, что область R1 отражения кандидата является отражением света другого транспортного средства на следующей соседней полосе движения (S3). После этого завершается процесс, показанный на фиг. 5.
[0040] Если, с другой стороны, определяется, что расстояние D равно или меньше предварительно определенного расстояния ("Да" на S7), то блок 36 определения причин определяет характерное значение Q яркости секции SE (S8). Затем, блок 36 определения причин определяет, удовлетворяется ли или нет уравнение "характерное значение Q яркости" > "характерное значение P яркости" + "пороговое значение TH" (S9).
[0041] Если определено, что уравнение "характерное значение Q яркости" > "характерное значение P яркости" + "пороговое значение TH" удовлетворяется ("Да" на S9), то разность значений яркости между обоими значениями Q и P яркости превышает пороговое значение TH, и таким образом блок 36 определения причин определяет, что область R1 отражения кандидата является отражением света другого транспортного средства на следующей соседней полосе движения (S3). После этого завершается процесс, показанный на фиг. 5.
[0042] Если, с другой стороны, определяется, что уравнение "характерное значение Q яркости" > "характерное значение P яркости" + "пороговое значение TH" не удовлетворяется ("Нет" на S9), то разность значений яркости между обоими значениями Q и P яркости меньше порогового значения TH, и таким образом блок 36 определения причин определяет, что область R1 отражения кандидата возникает в результате света другого транспортного средства на соседней полосе движения, и определяет, что присутствует другое транспортное средство на соседней полосе движения (S10). После этого завершается процесс, показанный на фиг. 5. Следует отметить, что пороговое значение TH в данном документе задается равным, например, уровню яркости в диапазоне 5-10.
[0043] Следует отметить, что если в процессе этапа S3 определяется, что область R1 отражения кандидата является отражением света другого транспортного средства на следующей соседней полосе движения, то блок 36 определения причин выводит сигнал подавления сигнализации, как показано на фиг. 3. Соответственно, может предотвращаться ситуация, в которой выдается сигнал тревоги, когда нет возможности контакта с другим транспортным средством, даже если собственное транспортное средство V изменяет полосу движения, и таким образом сигнал тревоги не требуется.
[0044] Если, с другой стороны, в процессе этапа S10 определяется, что присутствует другое транспортное средство на соседней полосе движения, то блок 36 определения причин не выводит сигнал подавления сигнализации, и устройство 40 сигнализации, как предполагается, уведомляет водителя о наличии находящегося рядом транспортного средства через зуммер или лампу.
[0045] Обобщая вышеуказанное, способ помощи при вождении согласно настоящему варианту осуществления предоставляет водителю различные фрагменты информации из результата захвата изображений около собственного транспортного средства посредством блока захвата изображений (камеры 10) и включает в себя: этап захвата изображений для захвата изображений позади сбоку от собственного транспортного средства посредством блока захвата изображений, смонтированного на собственном транспортном средстве; этап задания области обнаружения для задания области обнаружения для обнаружения, из данных изображений, захваченных на этапе захвата изображений, наличия находящегося рядом транспортного средства на соседней полосе движения; этап обнаружения светопроецирующего объекта кандидата для обнаружения светопроецирующего объекта кандидата, который проецирует свет с яркостью, равной или превышающей предварительно определенное пороговое значение; этап определения причин для определения того, существует ли или нет светопроецирующий объект кандидата, который указывает наличие находящегося рядом транспортного средства, в области обнаружения, заданной на этапе задания области обнаружения; и этап предоставления информации для предоставления водителю информации о наличии находящегося рядом транспортного средства, если на этапе определения причин определяется, что свет проецируется из находящегося рядом транспортного средства, при этом можно сказать, что этап определения причин определяет, проецируется ли или нет свет из находящегося рядом транспортного средства, посредством обнаружения позиции захвата изображения (соответствующей расстоянию D) светопроецирующего объекта кандидата, обнаруженного на этапе обнаружения светопроецирующего объекта кандидата.
[0046] Таким образом, как описано выше, устройство 1 помощи при вождении и способ обнаружения находящегося рядом транспортного средства согласно настоящему варианту осуществления могут определять поверхность дороги, отражающую свет другого транспортного средства на соседней полосе движения или свет другого транспортного средства на следующей соседней полосе движения, посредством определения, из области захвата изображений, области R1 отражения кандидата, имеющую яркость, равную или превышающую предварительно определенное пороговое значение. Помимо этого, определяется значение яркости позиции, расположенной в прямолинейном направлении, соединяющем позицию области R1 отражения кандидата и камеру 10 и отделенном от собственного транспортного средства V на предварительно определенное расстояние. Соответственно, если область R1 отражения кандидата является поверхностью дороги, отражающей свет другого транспортного средства, появляется возможность обнаружить позицию света другого транспортного средства посредством обнаружения позиции, отделенной на предварительно определенное расстояние, и передачи отражающей поверхности дороги. Затем, определяется разность между значением P яркости области R1 отражения кандидата и значением Q яркости позиции, отделенной на предварительно определенное расстояние, и обнаруживается находящееся рядом транспортное средство в области захвата изображений на основе определенной разности значений яркости. Соответственно, если область R1 отражения кандидата является поверхностью дороги, отражающей свет другого транспортного средства, то разность значений яркости становится больше, поскольку существует еще более яркий участок вследствие наличия света другого транспортного средства в позиции, отделенной на предварительно определенное расстояние, в противном случае разность значений яркости имеет тенденцию снижаться. Следовательно, позиция света другого транспортного средства может быть обнаружена из разности значений яркости, что позволяет повышать точность обнаружения находящегося рядом транспортного средства.
[0047] Помимо этого, предварительно определенное пороговое значение регулируется так, что оно выше по мере того, как угол θ2 между оптической осью камеры 10 и прямой линией, соединяющей область, которая должна быть обнаружена (т.е. область R1 движущегося объекта), и камеру 10, становится меньше. Здесь, поскольку свет другого транспортного средства проецируется вперед, количество света, вводимое в камеру 10 из позиции ближе к оптической оси камеры 10, имеет тенденцию быть большим. Следовательно, надлежащее пороговое значение может задаваться посредством регулирования предварительно определенного порогового значения так, что оно выше для меньшего значения угла θ2.
[0048] Помимо этого, область, в которой может присутствовать находящееся рядом транспортное средство (т.е. область R1 движущегося объекта), определяется из захваченной области, и область R1 отражения кандидата, имеющая яркость, равную или превышающую предварительно определенное пороговое значение, определяется в диапазоне, ограниченном определенной областью. Следовательно, объем обработки может быть уменьшен без необходимости выполнять вышеуказанный процесс для необязательных областей.
[0049] Помимо этого, указывается позиция P2 на следующей соседней полосе движения, и значения яркости сканируются и определяются вверх в реальном пространстве от указанной позиции P2. Следовательно, позиция света другого транспортного средства на следующей соседней полосе движения может быть захвачена с намного более высокой точностью.
[0050] Помимо этого, значения яркости сканируются и определяются вверх в реальном пространстве от указанной позиции P2, чтобы извлекать секцию SE, имеющую последовательные значения яркости, равные или превышающие предварительно определенное значение, и определено, что находящееся рядом транспортное средство обнаружено, если число пикселей в извлеченной секции SE, имеющей последовательные значения яркости, равно или меньше заданного значения. Следовательно, если число пикселей в извлеченной секции SE, имеющей последовательные значения яркости, является малым и меньше размера света, то не выполняется ошибочное определение в отношении того, что секция SE является отражением света другого транспортного средства на следующей соседней полосе движения, что позволяет повышать точность обнаружения.
[0051] Помимо этого, если расстояние между самой низкой точкой P3 извлеченной секции SE, имеющей последовательные значения яркости, и указанной позицией P2 равно или меньше предварительно определенного расстояния, то определено, что находящееся рядом транспортное средство обнаружено. Следовательно, если самая низкая точка P3 извлеченной секции SE, имеющей последовательные значения яркости, не составляет, по меньшей мере, не меньше позиции света другого транспортного средства, и расстояние от указанной позиции P2 находится близко, то не выполняется ошибочное определение в отношении того, что секция SE является отражением света другого транспортного средства на следующей соседней полосе движения, что позволяет повышать точность обнаружения.
[0052] Второй вариант осуществления
Далее поясняется второй вариант осуществления настоящего изобретения. Устройство 2 помощи при вождении и способ обнаружения находящегося рядом транспортного средства согласно второму варианту осуществления являются аналогичными устройству и способу по первому варианту осуществления за исключением того, что отличается часть конфигурации и процессов. Далее описывается отличие от первого варианта осуществления.
[0053] Фиг. 6 является блок-схемой, показывающей подробности компьютера 30 устройства 2 помощи при вождении согласно второму варианту осуществления. Следует отметить, что фиг. 6 также показывает камеру 10 и устройство 40 сигнализации, чтобы прояснять взаимосвязь соединения.
[0054] Как показано на фиг. 6, в компьютере 30 второго варианта осуществления, блок 36 определения причин имеет детектор 36a разности яркости (средство обнаружения разности яркости) и детектор 36b находящихся рядом транспортных средств (средство обнаружения находящихся рядом транспортных средств). Следует отметить, что детектор 33 движущихся объектов и детектор 34 области отражения кандидата составляют блок задания области обнаружения (средство задания области обнаружения) настоящего варианта осуществления. Помимо этого, детектор 35 яркости в предварительно определенной позиции составляет детектор светопроецирующего объекта кандидата (средство обнаружения светопроецирующего объекта кандидата) настоящего варианта осуществления.
[0055] Фиг. 7 показывает подробности детектора 35 яркости в предварительно определенной позиции согласно настоящему варианту осуществления, показанному на фиг. 6, при этом фиг. 7(a) показывает изображение, захваченное посредством камеры 10, а фиг. 7(b) показывает значение яркости пикселя выше.
[0056] Как показано на фиг. 7, при обнаружении позиции P2, детектор 35 яркости в предварительно определенной позиции сканирует и определяет значения яркости вверх от позиции P2. Другими словами, значения яркости получаются вдоль линии, указываемой посредством ссылочной позиции "50" по фиг. 7(a).
[0057] Кроме того, детектор 35 яркости в предварительно определенной позиции затем определяет секцию, имеющую последовательные значения яркости, равные или превышающие предварительно определенное значение. Как показано на фиг. 7(b), четвертый-десятый пиксели выше позиции P2 формируют секцию SE1, имеющую последовательные значения яркости, равные или превышающие предварительно определенное значение. Аналогично, тринадцатый и четырнадцатый пиксели выше позиции P2 формируют секцию SE2, имеющую последовательные значения яркости, равные или превышающие предварительно определенное значение.
[0058] Как описано выше, после определения секций SE1 и SE2, имеющих последовательные значения яркости, равные или превышающие предварительно определенное значение, посредством детектора 35 яркости в предварительно определенной позиции, детектор 36b находящихся рядом транспортных средств выбирает, из секций SE1 и SE2, описанных выше, секцию SE1, имеющую максимальное число последовательных значений яркости.
[0059] Затем, детектор 36a разности яркости получает характерное значение Q яркости секции SE1. Характерное значение Q яркости может быть значением яркости центроида (центра) или может быть статистическим значением, аналогично характерному значению P яркости. Затем, детектор 36a разности яркости вычисляет разность значений яркости между характерными значениями P и Q яркости. Если разность значений яркости превышает пороговое значение TH, то детектор 36b находящихся рядом транспортных средств определяет, что область R1 отражения кандидата является отражением света другого транспортного средства от поверхности дороги на следующей соседней полосе движения. С другой стороны, в противном случае детектор 36b находящихся рядом транспортных средств определяет, что область R1 отражения кандидата является светом от другого транспортного средства на соседней полосе движения, и полагает, что присутствует находящееся рядом транспортное средство.
[0060] Следует отметить, что детектор 36b находящихся рядом транспортных средств также выполняет следующий процесс, чтобы обнаруживать другое транспортное средство на соседней полосе движения с более высокой точностью. Детектор 36b находящихся рядом транспортных средств сначала определяет, равно ли или меньше либо нет число пикселей в секции SE1 заданного значения. Здесь, случай, в котором число пикселей в извлеченной секции SE1, имеющей последовательные значения яркости, равно или меньше заданного значения, предлагает случай, в котором очень яркий участок является малым и меньше размера света другого транспортного средства на следующей соседней полосе движения. В этом случае, детектор 36b находящихся рядом транспортных средств определяет, что секция SE1 представляет собой не свет другого транспортного средства на следующей соседней полосе движения, а свет находящегося рядом транспортного средства, и обнаруживает находящееся рядом транспортное средство. Если, с другой стороны, число пикселей в секции SE1 равно или меньше заданного значения, то детектор 36b находящихся рядом транспортных средств определяет, что секция SE1 является светом другого транспортного средства на следующей соседней полосе движения. Другими словами, определяется, что область R1 отражения кандидата является отражением света другого транспортного средства от поверхности дороги на следующей соседней полосе движения.
[0061] Помимо этого, детектор 36b находящихся рядом транспортных средств получает расстояние D между самой низкой точкой P3 секции SE1, определенной посредством детектора 35 яркости в предварительно определенной позиции, и позицией P2. Детектор 36b находящихся рядом транспортных средств затем определяет, равно ли или меньше либо нет расстояние D предварительно определенного расстояния. Если расстояние равно или меньше предварительно определенного расстояния, то позиция является слишком низкой для света другого транспортного средства на следующей соседней полосе движения, и таким образом можно определить, что это не свет другого транспортного средства на следующей соседней полосе движения. Соответственно, детектор 36b находящихся рядом транспортных средств определяет, что секция SE1 является светом находящегося рядом транспортного средства, и обнаруживает находящееся рядом транспортное средство. Если, с другой стороны, расстояние D не равно или не меньше предварительно определенного расстояния, то детектор 36b находящихся рядом транспортных средств определяет, что секция SE1 является светом другого транспортного средства на следующей соседней полосе движения. Другими словами, определяется, что область R1 отражения кандидата является отражением света другого транспортного средства от поверхности дороги на следующей соседней полосе движения.
[0062] Устройство помощи при вождении согласно второму варианту осуществления предоставляет, аналогично первому варианту осуществления, водителю различные фрагменты информации из результата захвата изображений около собственного транспортного средства и включает в себя: блок захвата изображений (камеру 10), смонтированный на собственном транспортном средстве, чтобы захватывать изображения позади сбоку от собственного транспортного средства; блок задания области обнаружения (детектор 33 движущихся объектов и детектор 34 области отражения кандидата), который задает область обнаружения для обнаружения, из данных изображений, захваченных посредством блока захвата изображений, наличия находящегося рядом транспортного средства на соседней полосе движения; детектор светопроецирующего объекта кандидата (детектор 35 яркости в предварительно определенной позиции), который обнаруживает светопроецирующий объект кандидата, который проецирует свет с яркостью, равной или превышающей предварительно определенное пороговое значение; блок определения причин (блок 36 определения причин), который определяет, существует ли или нет светопроецирующий объект кандидата, который указывает наличие находящегося рядом транспортного средства, в области обнаружения, заданной посредством блока задания области обнаружения; и поставщик информации (устройство 40 сигнализации), который предоставляет водителю информацию о наличии находящегося рядом транспортного средства, если посредством блока определения причин определяется, что свет проецируется из находящегося рядом транспортного средства, при этом можно сказать, что блок определения причин определяет, проецируется ли или нет свет из находящегося рядом транспортного средства, посредством обнаружения позиции захвата изображения (соответствующей расстоянию D) светопроецирующего объекта кандидата, обнаруженного посредством детектора светопроецирующего объекта кандидата.
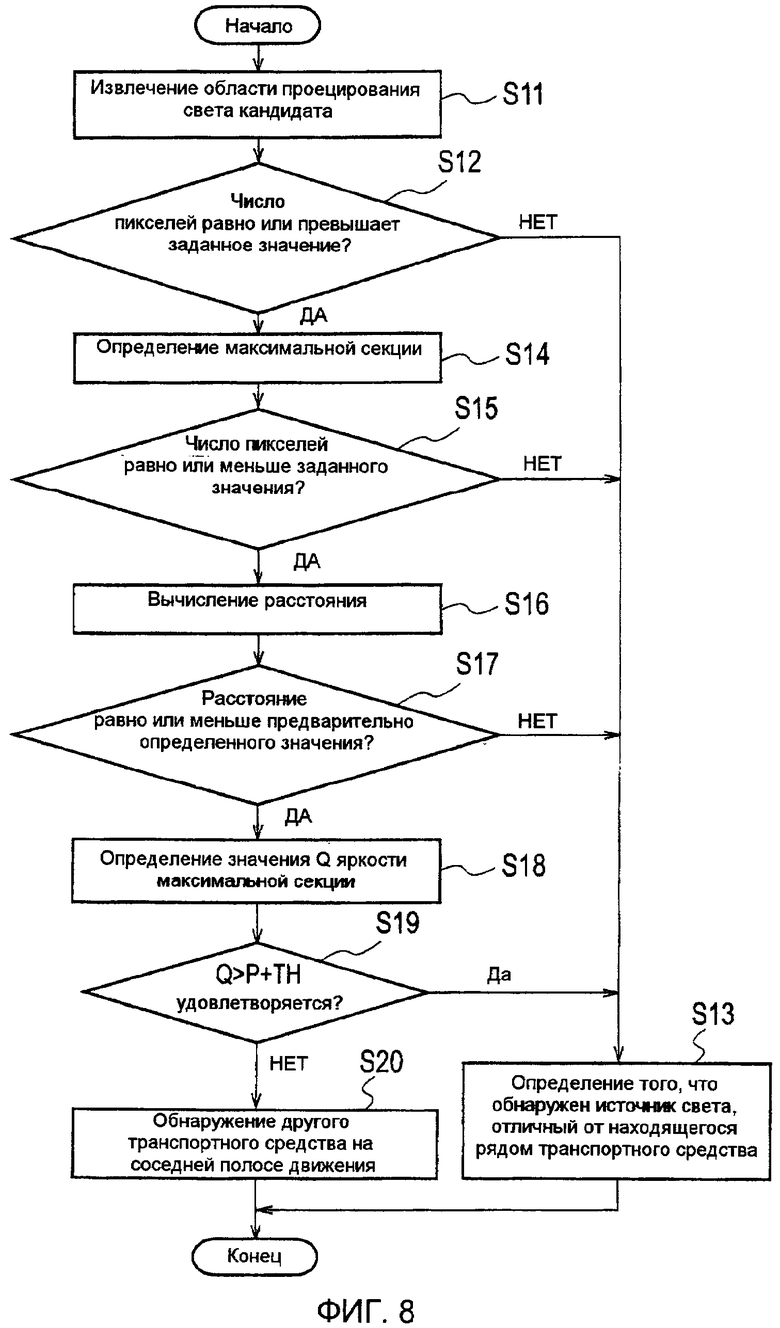
[0063] Далее описывается способ обнаружения находящегося рядом транспортного средства устройства 2 помощи при вождении согласно настоящему варианту осуществления. Фиг. 8 является блок-схемой последовательности операций способа, показывающей способ обнаружения находящегося рядом транспортного средства для устройства 2 помощи при вождении согласно настоящему варианту осуществления, и описывает подробности обработки детектора 35 яркости в предварительно определенной позиции и блока 36 определения причин, показанного на фиг. 6.
[0064] Во-первых, как показано на фиг. 8, детектор 35 яркости в предварительно определенной позиции указывает область, имеющую значение яркости, равное или превышающее предварительно определенное значение, в качестве области RS проецирования света кандидата из области следующей соседней полосы движения в некотором диапазоне направляющих углов около прямолинейного направления, соединяющего позицию области R1 отражения кандидата и камеру 10, в состоянии просмотра собственного транспортного средства V сверху (S11).
[0065] Затем, детектор 35 яркости в предварительно определенной позиции определяет, равно ли или превышает либо нет число пикселей в области RS проецирования света кандидата предварительно определенное значение (заданное значение числа пикселей) (S12). Затем, если определено, что число пикселей в области RS проецирования света кандидата не равно или превышает заданное значение ("Нет" на S12), то очень вероятно, что область RS проецирования света кандидата является проецированием света из источника света, такого как уличный фонарь, который не является транспортным средством, и таким образом блок 36 определения причин определяет, что область RS проецирования света кандидата определена в качестве источника света, отличного от находящегося рядом транспортного средства (S13). Если, с другой стороны, определяется, что число пикселей в области RS проецирования света кандидата равно или превышает заданное значение ("Да" на S12), то очень вероятно, что область RS проецирования света кандидата является светом, проецируемым из находящегося рядом транспортного средства или следующего находящегося рядом транспортного средства, и таким образом детектор 35 яркости в предварительно определенной позиции сканирует и определяет значения яркости вверх в реальном пространстве от характерной позиции в области RS проецирования света кандидата, чтобы определить, каким именно является транспортное средство. Здесь, заданное значение числа пикселей равно или превышает три в исходном захваченном изображении. Тем не менее, это не является ограничением, и может задаваться значение, равное или превышающее три.
[0066] Если, с другой стороны, определяется, что число пикселей в области RS проецирования света кандидата равно или превышает заданное значение ("Да" на S12), то очень вероятно, что область RS проецирования света кандидата является светом, проецируемым из находящегося рядом транспортного средства или следующего находящегося рядом транспортного средства, и таким образом детектор 35 яркости в предварительно определенной позиции сканирует и определяет значения яркости вверх в реальном пространстве от характерной позиции в области RS проецирования света кандидата, чтобы определить, каким именно является транспортное средство (S14). Другими словами, детектор 35 яркости в предварительно определенной позиции сканирует и определяет значения яркости вверх в реальном пространстве от позиции P2, указываемой в качестве характерной позиции в области RS проецирования света кандидата, и определяет наибольшую из секций SE1 и SE2, имеющих значение яркости, равное или превышающее предварительно определенное значение (S14). Затем, детектор 36b находящихся рядом транспортных средств определяет, равно ли или меньше либо нет число пикселей в наибольшей секции SE1 заданного значения (S15).
[0067] Если определено, что число пикселей в наибольшей секции SE1 не равно или не меньше заданного значения ("Нет" на S15), то очень вероятно, что секция SE1 является светом другого транспортного средства на следующей соседней полосе движения, поскольку число пикселей превышает заданное значение, и таким образом детектор 36b находящихся рядом транспортных средств определяет, что область R1 отражения кандидата является отражением света другого транспортного средства на следующей соседней полосе движения (S13). После этого завершается процесс, показанный на фиг. 8.
[0068] Если, с другой стороны, определяется, что число пикселей в наибольшей секции SE1 равно или меньше заданного значения ("Да" на S15), то детектор 36b находящихся рядом транспортных средств вычисляет расстояние D между самой низкой точкой P3 секции SE1 и указанной позицией P2 (S16). Затем, детектор 36b находящихся рядом транспортных средств определяет, равно ли или меньше либо нет расстояние D предварительно определенного расстояния (S17). Расстояние D может задаваться, без ограничения секцией SE1, в качестве расстояния от камеры до источника света следующего находящегося рядом транспортного средства в направлении ширины транспортного средства. Помимо этого, может задаваться комбинация вышеуказанного. Например, если расстояние в направлении высоты (секция SE1) задается фиксированно равным 70 см, то расстояние в направлении ширины транспортного средства может задаваться в диапазоне 1-4,5 м, например, или если расстояние в направлении ширины транспортного средства задается фиксированно равным 6,5 м, то расстояние в направлении высоты может задаваться в диапазоне 60-90 см. Тем не менее, эти значения являются только примерными и не ограничены вышеозначенным. Источник света следующего находящегося рядом транспортного средства, как предполагается, определяется посредством прохождения через этот этап.
[0069] Если определено, что расстояние D не равно или не меньше предварительно определенного расстояния ("Нет" на S17), то очень вероятно, что секция SE1 является светом другого транспортного средства на следующей соседней полосе движения, поскольку расстояние D составляет, по меньшей мере, не меньше света другого транспортного средства, и таким образом детектор 36b находящихся рядом транспортных средств определяет, что область R1 отражения кандидата является отражением света другого транспортного средства на следующей соседней полосе движения (S13). После этого завершается процесс, показанный на фиг. 8.
[0070] Если, с другой стороны, определяется то, что расстояние D равно или меньше предварительно определенного расстояния ("Да" на S17), то детектор 36a разности яркости определяет характерное значение Q яркости наибольшей секции SE1 (S18). Затем, детектор 36a разности яркости определяет, удовлетворяется ли или нет уравнение "характерное значение Q яркости" > "значение P яркости"+"пороговое значение TH" (S19).
[0071] Если определено, что уравнение "характерное значение Q яркости" > "характерное значение P яркости" + "пороговое значение TH" удовлетворяется ("Да" на S19), то разность значений яркости между обоими значениями Q и P яркости превышает пороговое значение TH, и таким образом детектор 36b находящихся рядом транспортных средств определяет, что область R1 отражения кандидата является отражением света другого транспортного средства на следующей соседней полосе движения (S13). После этого завершается процесс, показанный на фиг. 8.
[0072] Если, с другой стороны, определяется то, что уравнение "характерное значение Q яркости" > "характерное значение P яркости" + "пороговое значение TH" не удовлетворяется ("Нет" на S19), то разность значений яркости между обоими значениями Q и P яркости меньше порогового значения TH, и таким образом детектор 36b находящихся рядом транспортных средств определяет, что область R1 отражения кандидата возникает в результате света другого транспортного средства на соседней полосе движения, и определяет, что присутствует другое транспортное средство на соседней полосе движения (S20). После этого завершается процесс, показанный на фиг. 8. Следует отметить, что пороговое значение TH в данном документе задается равным, например, уровню яркости в диапазоне 5-10.
[0073] Следует отметить, что если в процессе этапа S13 определяется, что область R1 отражения кандидата является отражением света другого транспортного средства на следующей соседней полосе движения, то блок 36 определения причин выводит сигнал подавления сигнализации, как показано на фиг. 6. Соответственно, может предотвращаться ситуация, в которой выдается сигнал тревоги, когда нет возможности контакта с другим транспортным средством, даже если собственное транспортное средство V изменяет полосу движения, и таким образом сигнал тревоги не требуется.
[0074] Если, с другой стороны, в процессе этапа S20 определяется, что присутствует другое транспортное средство на соседней полосе движения, то блок 36 определения причин не выводит сигнал подавления сигнализации, и устройство 40 сигнализации, как предполагается, уведомляет водителя о наличии находящегося рядом транспортного средства через зуммер или лампу.
[0075] Способ помощи при вождении согласно второму варианту осуществления также предоставляет, аналогично первому варианту осуществления, водителю различные фрагменты информации из результата захвата изображений около собственного транспортного средства посредством блока захвата изображений (камеры 10) и включает в себя: этап захвата изображений для захвата изображений позади сбоку от собственного транспортного средства посредством блока захвата изображений, смонтированного на собственном транспортном средстве; этап задания области обнаружения для задания области обнаружения для обнаружения, из данных изображений, захваченных на этапе захвата изображений, наличия находящегося рядом транспортного средства на соседней полосе движения; этап обнаружения светопроецирующего объекта кандидата для обнаружения светопроецирующего объекта кандидата, который проецирует свет с яркостью, равной или превышающей предварительно определенное пороговое значение; этап определения причин для определения того, существует ли или нет светопроецирующий объект кандидата, который указывает наличие находящегося рядом транспортного средства, в области обнаружения, заданной на этапе задания области обнаружения; и этап предоставления информации для предоставления водителю информации о наличии находящегося рядом транспортного средства, если на этапе определения причин определяется, что свет проецируется из находящегося рядом транспортного средства, при этом можно сказать, что этап определения причин определяет, проецируется ли или нет свет из находящегося рядом транспортного средства, посредством обнаружения позиции захвата изображения (соответствующей расстоянию D) светопроецирующего объекта кандидата, обнаруженного на этапе обнаружения светопроецирующего объекта кандидата.
[0076] Таким образом, как описано выше, устройство 2 помощи при вождении и способ обнаружения находящегося рядом транспортного средства согласно настоящему варианту осуществления могут обнаруживать поверхность дороги, отражающую свет другого транспортного средства на соседней полосе движения или свет другого транспортного средства на следующей соседней полосе движения, посредством определения, из области захвата изображений, области R1 отражения кандидата, имеющего яркость, равную или превышающую предварительно определенное пороговое значение. Помимо этого, определяется значение яркости позиции, расположенной в прямолинейном направлении, соединяющем позицию области R1 отражения кандидата и камеру 10 и отделенном от собственного транспортного средства V на предварительно определенное расстояние. Соответственно, если область R1 отражения кандидата является поверхностью дороги, отражающей свет другого транспортного средства, то появляется возможность обнаруживать позицию света другого транспортного средства посредством обнаружения позиции, отделенной на предварительно определенное расстояние, и передачи отражающей поверхности дороги. Затем, определяется разность между значением P яркости области R1 отражения кандидата и значением Q яркости позиции, отделенной на предварительно определенное расстояние, и обнаруживается находящееся рядом транспортное средство в области захвата изображений на основе определенной разности значений яркости. Соответственно, если область R1 отражения кандидата является поверхностью дороги, отражающей свет другого транспортного средства, то разность значений яркости становится большей, поскольку существует еще более яркий участок вследствие наличия света другого транспортного средства в позиции, отделенной на предварительно определенное расстояние, в противном случае разность значений яркости имеет тенденцию снижаться. Следовательно, позиция света другого транспортного средства может быть определена из разности значений яркости, что позволяет повышать точность обнаружения находящегося рядом транспортного средства.
[0077] Помимо этого, предварительно определенное пороговое значение регулируется так, что оно выше по мере того, как угол θ2 между оптической осью камеры 10 и прямой линией, соединяющей область, которая должна быть обнаружена (т.е. область R1 движущегося объекта), и камеру 10, становится меньше. Здесь, поскольку свет другого транспортного средства проецируется вперед, количество света, вводимое в камеру 10 из позиции ближе к оптической оси камеры 10, имеет тенденцию быть большим. Следовательно, надлежащее пороговое значение может задаваться посредством регулирования предварительно определенного порогового значения так, что оно выше для меньшего значения вышеуказанного угла θ2.
[0078] Кроме того, область, в которой может присутствовать находящееся рядом транспортное средство (т.е. область R1 движущегося объекта), определяется из захваченной области, и область R1 отражения кандидата, имеющий яркость, равную или превышающую предварительно определенное пороговое значение, определяется в диапазоне, ограниченном определенной областью. Следовательно, объем обработки может быть уменьшен без необходимости выполнять вышеуказанный процесс для необязательных областей.
[0079] Помимо этого, указывается позиция P2 на следующей соседней полосе движения, и значения яркости сканируются и определяются вверх в реальном пространстве от указанной позиции P2. Следовательно, позиция света другого транспортного средства на следующей соседней полосе движения может быть захвачена с намного более высокой точностью.
[0080] Кроме того, значения яркости сканируются и определяются вверх в реальном пространстве от указанной позиции P2, чтобы извлекать секции SE1 и SE2, имеющие последовательные значения яркости, равные или превышающие предварительно определенное значение, и определено, что находящееся рядом транспортное средство обнаружено, если число пикселей в извлеченной секции SE1, имеющей последовательные значения яркости, равно или меньше заданного значения. Следовательно, если число пикселей в извлеченной секции SE1, имеющей последовательные значения яркости, является малым и меньше размера света, то не выполняется ошибочное определение в отношении того, что секция SE1 является отражением света другого транспортного средства на следующей соседней полосе движения, что позволяет повышать точность обнаружения.
[0081] Помимо этого, если расстояние между самой низкой точкой P3 извлеченной секции SE1, имеющей последовательные значения яркости, и указанной позицией P2 равно или меньше предварительно определенного расстояния, то определено, что находящееся рядом транспортное средство обнаружено. Следовательно, если самая низкая точка P3 извлеченной секции SE1, имеющей последовательные значения яркости, не составляет, по меньшей мере, не меньше позиции света другого транспортного средства, и расстояние от указанной позиции P2 находится близко, то не выполняется ошибочное определение в отношении того, что секция SE1 является отражением света другого транспортного средства на следующей соседней полосе движения, что позволяет повышать точность обнаружения.
[0082] Третий вариант осуществления
Далее поясняется третий вариант осуществления настоящего изобретения. Устройство 3 помощи при вождении и способ обнаружения находящегося рядом транспортного средства этого согласно третьему варианту осуществления являются аналогичными устройству и способу по второму варианту осуществления за исключением того, что отличается часть конфигурации и процессов. Далее описывается отличие от второго варианта осуществления.
[0083] Фиг. 9 является блок-схемой, показывающей подробности компьютера 30 устройства 3 помощи при вождении согласно третьему варианту осуществления. Фиг. 9 также показывает камеру 10 и устройство 40 сигнализации, чтобы прояснять взаимосвязь соединения.
[0084] Как показано на фиг. 9, компьютер 30 третьего варианта осуществления включает в себя детектор 37 движущихся объектов на основе оптического потока (средство обнаружения областей), вместо преобразователя 31 точки обзора, разностного детектора 32 и детектора 33 движущихся объектов.
[0085] Детектор 37 движущихся объектов на основе оптического потока обнаруживает другое транспортное средство из вектора движения объекта в изображении способом, конкретно описанным в патенте Японии № 4367475. В этом случае, детектор 37 движущихся объектов на основе оптического потока обнаруживает область R1 движущегося объекта и передает ее в детектор 34 области отражения кандидата, аналогично детектору 33 движущихся объектов, описанному во втором варианте осуществления.
[0086] Следует отметить, что процессы, выполняемые посредством детектора 34 области отражения кандидата, детектора 35 яркости в предварительно определенной позиции и блока 36 определения причин, являются аналогичными процессам по второму варианту осуществления. Детектор 33 движущихся объектов и детектор 34 области отражения кандидата составляют блок задания области обнаружения (средство задания области обнаружения) настоящего варианта осуществления. Детектор 35 яркости в предварительно определенной позиции составляет детектор светопроецирующего объекта кандидата (средство обнаружения светопроецирующего объекта кандидата) настоящего варианта осуществления.
[0087] Таким образом, как описано выше, устройство 3 помощи при вождении и способ обнаружения находящегося рядом транспортного средства согласно третьему варианту осуществления могут повышать точность обнаружения находящегося рядом транспортного средства, аналогично второму варианту осуществления. Кроме того, может задаваться надлежащее пороговое значение, посредством чего может быть уменьшен объем обработки. Помимо этого, позиция света другого транспортного средства на следующей соседней полосе движения может быть захвачена с намного более высокой точностью, что позволяет повышать точность обнаружения.
[0088] Кроме того, поскольку третий вариант осуществления включает в себя детектор 37 движущихся объектов на основе оптического потока, может быть определена область R1 движущегося объекта, даже если нет сигнала из датчика 20 скорости транспортного средства.
[0089] Как описано выше, хотя настоящее изобретение описано на основе вариантов осуществления, настоящее изобретение не ограничено вариантами осуществления, описанными выше, и изменения могут быть внесены, или варианты осуществления могут комбинироваться в диапазоне, который не отклоняется от объема настоящего изобретения.
[0090] Например, хотя устройства 1 и 2 помощи при вождении монтируются на транспортном средстве V в вариантах осуществления, описанных выше, они могут монтироваться на мотоцикле или автоматическом навигационном роботе без ограничения вышеозначенным. Помимо этого, находящееся рядом транспортное средство может быть мотоциклом или велосипедом.
[0091] Помимо этого, хотя вышеуказанный вариант осуществления не упоминает конкретно погоду, когда движется собственное транспортное средство V, отражение от поверхности дороги (зеркальное отражение) света другого транспортного средства становится большим, когда идет дождь. Следовательно, когда идет дождь, пороговое значение THR, которое меньше порогового значения TH, используемого, когда не идет дождь, может быть использовано в качестве порогового значения на этапе S7 по фиг. 5 и этапе S17 по фиг. 8 (этапах определения того, является область R1 отражения кандидата отражением света другого транспортного средства от поверхности дороги на соседней полосе движения или света другого транспортного средства на следующей соседней полосе движения). В этом случае, определяется, что область R1 отражения кандидата является светом другого транспортного средства на соседней полосе движения (S8, S18), только когда разность между характерным значением P яркости области R1 отражения кандидата и значением Q яркости позиции, отделенной на предварительно определенное расстояние, меньше порогового значения THR. Следовательно, появляется возможность определять находящееся рядом транспортное средство согласно погоде, когда собственное транспортное средство V движется.
[0092] Если, с другой стороны, на вышеуказанных этапах, если определено, что разность между характерным значением P яркости области R1 отражения кандидата и значением Q яркости позиции, отделенной на предварительно определенное расстояние, выше порогового значения THR, то определено, что область R1 отражения кандидата является зеркальным отражением света другого транспортного средства в следующей соседней полосе. В этом случае, процесс маскирования относительно зеркального отражения в области R1 отражения кандидата выполняется в течение предварительно определенного периода. В этом случае, период задается более длительным, если область R1 отражения кандидата находится дальше сзади собственного транспортного средства V (т.е. угол θ2 на фиг. 2 является меньше), или более длительным, если область R1 отражения кандидата существует в полосе обгона относительно собственного транспортного средства V, чем в ином случае.
Промышленная применимость
[0093] Как очевидно из вышеприведенного описания, настоящее изобретение может предоставлять устройство помощи при вождении и способ помощи при вождении, которые позволяют обнаруживать находящееся рядом транспортное средство с высокой точностью.
Список номеров ссылок
[0094] 1 - устройство помощи при вождении
10 - камера (блок/средство захвата изображений)
20 - датчик скорости транспортного средства
30 - компьютер
31 - преобразователь точки обзора
32 - разностный детектор
33 - детектор движущихся объектов (средство обнаружения областей)
34 - детектор области отражения кандидата (средство обнаружения области отражения от поверхности дороги)
35 - детектор яркости в предварительно определенной позиции (средство обнаружения яркости в предварительно определенной позиции)
36 - блок определения причин
36a - детектор разности яркости (средство обнаружения разности яркости)
36b - детектор находящихся рядом транспортных средств (средство обнаружения находящихся рядом транспортных средств)
37 - детектор движущихся объектов на основе оптического потока (блок/средство обнаружения областей)
40 - устройство сигнализации
V - собственное транспортное средство.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2616538C2 |
| БОРТОВОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2573110C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2635280C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2633120C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ И СПОСОБ ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2576315C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕКТОВ | 2022 |
|
RU2806452C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ И СПОСОБ ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2619059C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2636120C2 |



Группа изобретений относится к средствам помощи при вождении транспортного средства. Техническим результатом является повышение точности обнаружения транспортного средства, находящегося рядом с движимым транспортным средством. Устройство содержит блок захвата изображений, смонтированный на собственном транспортном средстве, захватывающий изображение сбоку от указанного транспортного средства, блок задания области обнаружения наличия находящегося рядом транспортного средства на соседней полосе движения, детектор светопроецирующего объекта кандидата, проецирующего свет с яркостью, равной или превышающей первое пороговое значение, блок определения причин, определяющий, существует ли или нет светопроецирующий объект кандидата, поставщик информации, предоставляющий водителю информацию о наличии находящегося рядом транспортного средства. 2 н. и 7 з.п. ф-лы, 9 ил.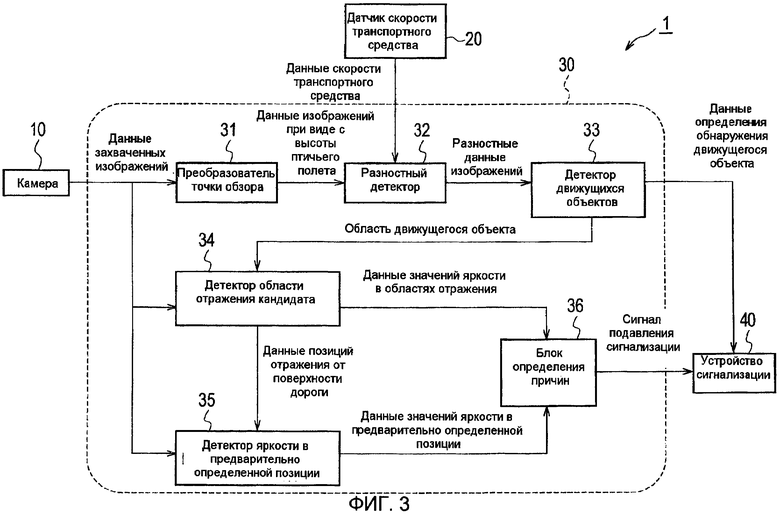
1. Устройство помощи при вождении, которое предоставляет водителю различные фрагменты информации из результата захвата изображений около собственного транспортного средства, содержащее:
- блок захвата изображений, смонтированный на собственном транспортном средстве, чтобы захватывать изображения позади сбоку от собственного транспортного средства;
- блок задания области обнаружения, который задает область обнаружения для обнаружения, из данных изображений, захваченных посредством блока захвата изображений, наличия находящегося рядом транспортного средства на соседней полосе движения;
- детектор светопроецирующего объекта кандидата, который обнаруживает светопроецирующий объект кандидата, который проецирует свет с яркостью, равной или превышающей первое пороговое значение;
- блок определения причин, который определяет, существует ли или нет светопроецирующий объект кандидата, который указывает, что свет, проецируемый из области обнаружения, заданной блоком задания области обнаружения, является светом, проецируемым из находящегося рядом транспортного средства; и
- поставщик информации, который предоставляет водителю информацию о наличии находящегося рядом транспортного средства, если посредством блока определения причин определено, что свет, проецируемый из области обнаружения, является светом, проецируемым из находящегося рядом транспортного средства,
при этом блок определения причин определяет, является ли или нет свет, проецируемый из области обнаружения, светом, проецируемым из находящегося рядом транспортного средства, посредством обнаружения позиции захвата изображения светопроецирующего объекта кандидата, обнаруженного посредством детектора светопроецирующего объекта кандидата.
2. Устройство помощи при вождении по п. 1, в котором блок задания области обнаружения включает в себя детектор областей отражения от поверхности дороги, который обнаруживает, в качестве области обнаружения, область с высокой яркостью, в которой яркость равна или выше второго порогового значения, в области захвата изображений, изображения которой захвачены посредством блока захвата изображений.
3. Устройство помощи при вождении по п. 2, в котором детектор светопроецирующего объекта кандидата включает в себя детектор яркости в предварительно определенной позиции, который обнаруживает, в качестве светопроецирующего объекта кандидата, позицию, расположенную в прямолинейном направлении, соединяющем позицию области с высокой яркостью, обнаруженную посредством детектора областей отражения от поверхности дороги и блока захвата изображений, и отделенную от собственного транспортного средства на предварительно определенное расстояние, в состоянии просмотра транспортного средства сверху, и определяет яркость позиции, и
блок определения причин включает в себя:
- детектор разности яркости, который определяет разность между значением яркости области с высокой яркостью, обнаруженной посредством детектора областей отражения от поверхности дороги, и значением яркости позиции, определенной посредством детектора яркости в предварительно определенной позиции; и
- детектор находящихся рядом транспортных средств, который обнаруживает находящееся рядом транспортное средство в области обнаружения на основе разности яркости, определенной посредством детектора разности яркости.
4. Устройство помощи при вождении по п. 2 или 3, в котором детектор областей отражения от поверхности дороги регулирует второе пороговое значение так, что оно выше по мере того, как угол между оптической осью блока захвата изображений и прямой линией, соединяющей область, которая должна быть обнаружена, и блок захвата изображений, становится меньше.
5. Устройство помощи при вождении по п. 2, в котором детектор областей отражения от поверхности дороги обнаруживает, в качестве области обнаружения, область с высокой яркостью, в которой яркость равна или выше второго порогового значения, в диапазоне, ограниченном областью, обнаруженной посредством блока задания области обнаружения.
6. Устройство помощи при вождении по п. 3, в котором детектор яркости в предварительно определенной позиции указывает позицию, расположенную в прямолинейном направлении, соединяющем позицию области с высокой яркостью, обнаруженную посредством детектора областей отражения от поверхности дороги и блока захвата изображений, и расположенную на следующей соседней полосе движения, которая является дополнительно соседней с соседней полосой движения, которая является соседней с полосой движения собственного транспортного средства.
7. Устройство помощи при вождении по п. 6, в котором детектор яркости в предварительно определенной позиции сканирует и определяет значения яркости вверх в реальном пространстве от указанной позиции и извлекает секцию, имеющую последовательные значения яркости, равные или превышающие предварительно определенное значение, и
блок определения причин определяет, что находящееся рядом транспортное средство обнаружено, если число пикселей в секции, имеющей последовательные значения яркости, извлеченные посредством детектора яркости в предварительно определенной позиции, равно или меньше заданного значения.
8. Устройство помощи при вождении по п. 7, в котором блок определения причин определяет, что находящееся рядом транспортное средство обнаружено, если расстояние между самой низкой точкой секции, имеющей последовательные значения яркости, извлеченные посредством детектора яркости в предварительно определенной позиции, и указанной позицией равно или меньше предварительно определенного расстояния.
9. Способ помощи при вождении, который предоставляет водителю различные фрагменты информации из результата захвата изображений около собственного транспортного средства посредством блока захвата изображений, содержащий:
- этап захвата изображений, на котором захватывают изображения позади сбоку от собственного транспортного средства посредством блока захвата изображений, смонтированного на собственном транспортном средстве;
- этап задания области обнаружения, на котором задают область обнаружения для обнаружения, из данных изображений, захваченных на этапе захвата изображений, наличия находящегося рядом транспортного средства на соседней полосе движения;
- этап обнаружения светопроецирующего объекта кандидата, на котором обнаруживают светопроецирующий объект кандидата, который проецирует свет с яркостью, равной или превышающей предварительно определенное пороговое значение;
- этап определения причин, на котором определяют, существует ли или нет светопроецирующий объект кандидата, который указывает, что свет, проецируемый из области обнаружения, заданной на этапе задания области обнаружения, является светом, проецируемым из находящегося рядом транспортного средства; и
- этап предоставления информации, на котором предоставляют водителю информацию о наличии находящегося рядом транспортного средства, если на этапе определения причин определено, что свет, проецируемый из области обнаружения, является светом, проецируемым из находящегося рядом транспортного средства,
при этом этап определения причин определяет, является ли или нет свет, проецируемый из области обнаружения, светом, проецируемым из находящегося рядом транспортного средства, посредством обнаружения позиции захвата изображения светопроецирующего объекта кандидата, обнаруженного на этапе обнаружения светопроецирующего объекта кандидата.
| US 20060184297 A1, 17.08.2006 | |||
| WO 2011037109 A1, 31.03.2011 | |||
| JP 2003211309 A, 17.09.2009 | |||
| ПРОТИВООСЛЕПИТЕЛЬНАЯ СИСТЕМА ОСВЕЩЕНИЯ ПУТИ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2034325C1 |
| RU 2064420 C1, 27.07.1996 | |||

