Область техники, к которой относится изобретение
Настоящее изобретение относится, в целом, к силовой установке автомобиля и, в частности, к управлению моментом, передаваемым от маховика к колесам автомобиля.
Уровень техники
Гибридная силовая передача автомобиля сочетает традиционную силовую установку, которая включает в себя двигатель внутреннего сгорания и ступенчатую автоматическую трансмиссию с системой накопления энергии для улучшения экономии топлива по сравнению с традиционной силовой установкой автомобиля. Различные технологии преобразования и накопления кинетической энергии включают в себя электрические системы, содержащие электродвигатель и аккумуляторную батарею; гидравлические системы, в которых происходит накопление энергии в гидравлической емкости под давлением, и маховиковые системы, накапливающие энергию на вращающемся маховике или диске.
Главная проблема, с которой сталкиваются производители маховиковых систем - это необходимость надежной и плавной передачи момента от маховика к колесам. Одним из предложенных вариантов является определение крутящего момента колеса путем измерения пробуксовки колеса как входной величины для передачи крутящего момента маховика к колесам автомобиля. Данное измерение может быть трудно выполнимым, поскольку имеет жесткие ограничения и может изменяться в зависимости от условий окружающей среды, из-за чего появляется необходимость очень точной регулировки соотношений. Пробуксовка колеса автомобиля является трудно измеряемой величиной, особенно при низких нагрузках, она имеет высокий коэффициент усиления. Небольшие погрешности в таком измерении могут вызвать серьезные нарушения в управлении.
Раскрытие изобретения
Способ управления силовой установкой автомобиля включает в себя определение необходимого крутящего момента маховика, определение необходимого максимального значения крутящего момента сцепления, посредством которого крутящий момент передается от маховика к колесам автомобиля (с учетом необходимого крутящего момента маховика), управление сцеплением для получения необходимого максимального крутящего момента сцепления, определение погрешности, возникающей из-за пробуксовки сцепления, и изменение передаточного отношения бесступенчатой трансмиссии, расположенной в последовательности приводных элементов между сцеплением и указанными колесами на передаточное отношение, уменьшающее погрешность, возникающую из-за пробуксовки.
Изобретение также относится к системе передачи энергии в силовой установке, содержащей маховик, колеса автомобиля, сцепление, посредством которого крутящий момент передается от маховика к указанным колесам, бесступенчатую трансмиссию, расположенную в последовательности приводных элементов между сцеплением и указанными колесами, и механизм конечной передачи, расположенный последовательно с указанной трансмиссией в последовательности приводных элементов между сцеплением и указанными колесами.
Во время ускорения автомобиля крутящий момент маховика обеспечивает добавочный положительный крутящий момент, дополнительный к моменту силовой установки автомобиля, передаваемому на колеса. В процессе замедления автомобиля маховик обеспечивает отрицательный крутящий момент, передаваемый на колеса, замещая, таким образом, фрикционный момент торможения колеса, преобразуя кинетическую энергию автомобиля и накапливая ее для дальнейшего движения автомобиля вместо того, чтобы терять ее при трении тормозных дисков.
Крутящий момент на выходе маховика регулируют для обеспечения точной передачи момента на колеса в зависимости от крутящего момента колеса, необходимого водителю. Крутящий момент, необходимый водителю - это сумма значений крутящего момента от основной силовой установки и крутящего момента от маховика,
В данном способе вместо сигналов пробуксовки колеса используют сигналы скорости на входе, измерение которых не составляет труда. Управление без обратной связи крутящим моментом от маховика уменьшает колебания значения крутящего момента колес. Управление пробуксовкой сцепления с обратной связью вызывает только небольшие искажения результирующего крутящего момента.
Все возможности использования предпочтительного варианта осуществления станут очевидны из следующего подробного описания, пунктов формулы изобретения и чертежей. Необходимо понимать, что описание и конкретные примеры предпочтительного варианта осуществления изобретения даны только для наглядности. Различные изменения и модификации описанных конфигураций и примеров будут очевидны для специалистов в данной области техники.
Краткое описание чертежей
Для облегчения понимания изобретения приведено следующее описание вместе с прилагаемыми чертежами, в которых:
На Фиг.1 показано схематичное изображение гибридной силовой установки с маховиком;
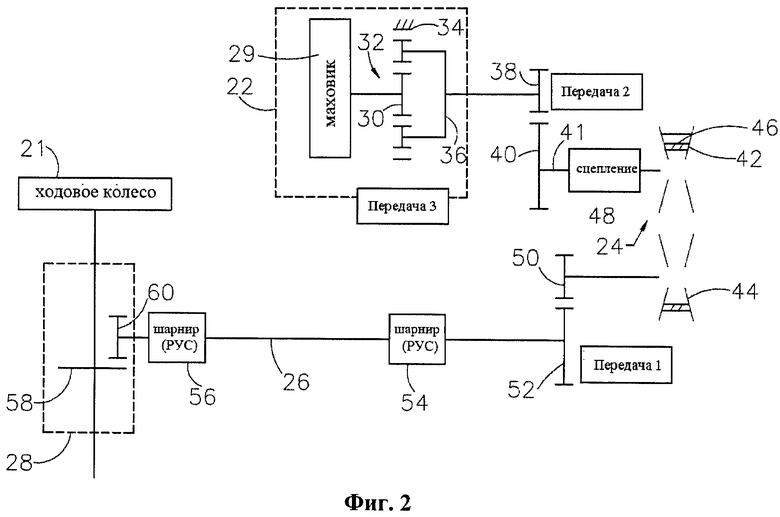
На Фиг.2 показано схематическое изображение передачи с постоянным коэффициентом и бесступенчатой трансмиссии силовой установки; и
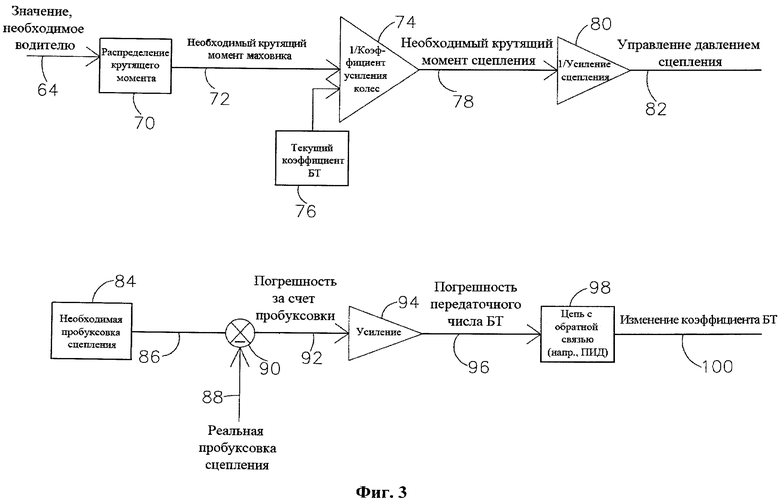
На Фиг.3 показана блок-схема способа управления крутящим моментом силовой установки, показанной на Фиг.1 и 2.
Осуществление изобретения
На Фиг.1 схематично показана гибридная силовая установка 10 для автомобиля. Передние колеса 12, 13 соединены с возможностью приведения в движение с источником 14 энергии, таким как двигатель внутреннего сгорания (ДВС), через трансмиссию 16, предпочтительно через многоскоростную ступенчатую трансмиссию, и передний дифференциальный механизм 18. Задние колеса 20, 21 соединены с возможностью приведения в движение с гибридным источником энергии, таким как маховиковое устройство 22, через трансмиссию 24, предпочтительно бесступенчатую трансмиссию (CVT), карданный вал 26 и задний дифференциальный механизм 28. Бесступенчатая трансмиссия 24 обеспечивает бесступенчатое, плавно регулируемое отношение скорости на входе к скорости на выходе. Для передачи энергии через бесступенчатую трансмиссию 24 используют механизмы ременного привода и механизмы фрикционного привода.
В данной гибридной силовой установке 10 происходит преобразование энергии торможения колес и ее механическое накопление на маховике 22. Передаточное отношение бесступенчатой трансмиссии 24 изменяют либо для накопления энергии вращения на маховике 22, либо для ее высвобождения с маховика 22 и передачи на колеса 20, 21 в пределах рабочего диапазона бесступенчатой трансмиссии.
На Фиг.2 показаны варианты возможных передаточных отношений для данного варианта осуществления изобретения. Маховиковое устройство 22 содержит маховик 29, соединенный с центральной (солнечной) шестерней 30 стандартной планетарной передачи 32, включающей также кольцевую шестерню 34, неподвижно закрепленную без возможности поворота, водило 36 и планетарные шестерни (сателлиты), расположенные на водиле и находящиеся в зацеплении с центральной шестерней и кольцевой шестерней. Передаточное отношение, создаваемое передачей 32, составляет предпочтительно около 5,07. Планетарная передача 32 обозначена как Передача 3.
Водило 36 соединено с шестерней 38, которая находится в зацеплении с колесом 40. Предпочтительно шестерня 38 вращается примерно в 2,6 раза быстрее, чем колесо 40. Колесо 40 и шестерня 38 вместе обозначены как Передача 2. Крутящий момент маховика - это крутящий момент, передаваемый на вал 41.
Шкивы 42, 44 соединены с возможностью управления приводным ремнем 46, радиальное положение которого на роликах бывает разным. Передаточное отношение бесступенчатой трансмиссии изменяется в предпочтительном диапазоне от 2,54 до 0,42. Сцепление 48 соединяет шкив 42 и колесо 40 с возможностью приведения в движение.
Шкив 44 соединен с шестерней 50, которая находится в зацеплении с колесом 52. Предпочтительно шестерня 50 вращается примерно в 1,5-9,6 раз быстрее, чем колесо 52. Колесо 52 и шестерня 50 вместе обозначены как Передача 1.
Карданный вал 26, который содержит два карданных шарнира равных угловых скоростей (ШРУС) 54, 56, соединен с возможностью приведения в движение с кольцевой шестерней 58 заднего дифференциального механизма 28 через колесо 60. Задний дифференциальный механизм 28 обеспечивает передаточное отношение, равное примерно 3,58
Максимальный крутящий момент сцепления представляет собой варьируемую величину крутящего момента, передаваемого на сцепление в любом из рабочих режимов, т.е. в режиме пробуксовки, неполного включения или полного включения сцепления.
Полагая, что давление на всей фрикционной поверхности сцепления однородно,

где "Крутящий момент" - максимальная величина крутящего момента сцепления, Fсцепления - величина силы, как правило, прикладываемой к каждой фрикционной поверхности сцепления, µ - коэффициент трения, N - число фрикционных поверхностей сцепления, Dвнешний - внешний диаметр фрикционных поверхностей, а Dвнутренний - внутренний диаметр фрикционных поверхностей.
Сила усилительного поршня, активирующего сцепление, гидравлического давления, прикладываемого к поршню,

где Fпоршня - сила усилительного поршня, Dвнешнего поршня - внешний диаметр поверхности поршня, а Dвнутреннего поршня - внутренний диаметр поверхности поршня. Таким образом, максимальное значение крутящего момента сцепления 48 зависит от меняющегося давления на активирующем сцепление усилительном поршне. Давление представляет собой эффективное давление на усилительный поршень, т.е. фактическое давление минус давление, необходимое для преодоления усилия сопротивления пружин усилительного поршня.
Как очевидно из Фиг.2, крутящий момент на выходе, передаваемый на колеса 20, 21, представляет собой функцию крутящего момента сцепления

Отношение давления сцепления к крутящему моменту сцепления устанавливается на основании геометрической формы сцепления и поршня. Для управления крутящим моментом маховика осуществляют управление давлением сцепления для обеспечения нужного крутящего момента на выходе.
Помимо крутящего момента на выходе осуществляют управление пробуксовкой сцепления 48. С помощью управления пробуксовкой сцепления осуществляют управление маховиком 29, чтобы маховик либо накапливал энергию, либо высвобождал энергию. Направление потока энергии зависит от направления пробуксовки сцепления. Положительная пробуксовка сцепления происходит, когда часть сцепления 28, находящаяся со стороны Передачи 2 вращается быстрее, чем часть сцепления, находящаяся со стороны бесступенчатой трансмиссии. В результате положительной пробуксовки энергия передается от маховика 29 на колеса 20, 21 по мере уменьшения скорости вращения маховика. Отрицательная пробуксовка сцепления происходит, когда часть сцепления 28, находящаяся со стороны бесступенчатой трансмиссии, вращается быстрее, чем часть сцепления 28, находящаяся со стороны Передачи 2. В результате отрицательной пробуксовки происходит накопление энергии вращения в маховике 29 по мере увеличения скорости его вращения.
На Фиг.3 показана блок-схема этапов способа управления, исключающего использование параметра пробуксовки колеса в качестве входной величины для управления крутящим моментом колес. Вместо этого для обеспечения пробуксовки сцепления осуществляют регулировку передаточного отношения бесступенчатой трансмиссии с помощью управления пробуксовкой сцепления с обратной связью.
Запрос 64 водителя, представленный как степень смещения педали 66 газа или смещения дроссельной заслонки 68 двигателя, используется в качестве опорного значения для определения необходимого значения крутящего момента на выходе маховика (72) из диапазона значений крутящего момента (70).
На этапе 74, необходимый крутящий момент на выходе маховика (72) делят на передаточное отношение бесступенчатой трансмиссии и передаточное отношение компонентов силовой установки в последовательности приводных элементов между колесами и шкивом 44 бесступенчатой трансмиссии, т.е. на произведение (передаточное отношение Передачи 1 * передаточное отношение FD), для определения необходимого максимального крутящего момента (78) сцепления 48.
На этапе 80, необходимый максимальный крутящий момент (78) сцепления 48 делят на коэффициент усиления сцепления (крутящий момент сцепления на единицу давления) для определения величины давления (82), которым можно активировать сцепление и добиться необходимого максимального крутящего момента сцепления (78).
Функция 84, хранящаяся в электронной памяти, вырабатывает на выходе сигнал, передающий необходимое значение пробуксовки сцепления (86), соответствующее текущим рабочим условиям. Необходимая пробуксовка сцепления (86) предпочтительно имеет низкое значение, поскольку она отражает потерю энергии, которая нагревает фрикционные поверхности сцепления 48.
Разница между измеренным или реальным значением пробуксовки сцепления (88) и необходимым значением пробуксовки сцепления (86) определяют в точке 90 сложения, выходной сигнал которой является погрешностью, возникающей из-за пробуксовки (92), которую умножают на коэффициент усиления 94 бесступенчатой трансмиссии 24 (передаточное отношение бесступенчатой трансмиссии на единицу пробуксовки сцепления) для определения погрешности передаточного отношения бесступенчатой трансмиссии (96).
Контроллер 98 с обратной связью, предпочтительно ПИД-контроллер, получает сигнал о погрешности передаточного отношения бесступенчатой трансмиссии (96) и выдает на выходе управляющий сигнал (100), отражающий изменение передаточного отношения бесступенчатой трансмиссии, сводящего погрешность, возникающую из-за пробуксовки (90), к минимуму. В ответ на управляющий сигнал (100) изменяют радиусы зацепления шкивов 42 и 44 бесступенчатой трансмиссии 24 и приводного ремня 46 таким образом, что передаточное отношение бесступенчатой трансмиссии изменяется на величину, указанную в команде изменения величины передаточного отношения бесступенчатой трансмиссии (100).
В настоящем документе описан предпочтительный вариант осуществления настоящего изобретения. Тем не менее следует отметить, что могут быть использованы альтернативные варианты осуществления, отличные от показанных и описанных в настоящем документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАХОВИКОВАЯ ГИБРИДНАЯ СИСТЕМА | 2012 |
|
RU2560233C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРИВОДНОГО АГРЕГАТА ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2666088C2 |
| ЭЛЕКТРОПРИВОД АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2094250C1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| МЕХАНИЧЕСКАЯ ПЕРЕДАЧА С ГОЛОНОМНЫМ ВАРИАТОРОМ НЕПРЕРЫВНОГО ДЕЙСТВИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2011555C1 |
| ЭЛЕКТРО-ИНЕРЦИОННОЕ УСТРОЙСТВО К ЭЛЕКТРОМОБИЛЮ | 2002 |
|
RU2230220C2 |
| РЕКУПЕРАТИВНАЯ РЕВЕРСИВНАЯ БЕССТУПЕНЧАТАЯ ГИДРОТРАНСМИССИЯ КОЛЕСНОЙ МАШИНЫ | 2003 |
|
RU2259928C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2648504C2 |
| РЕКУПЕРАТИВНЫЙ ТОРМОЗ | 1991 |
|
RU2017024C1 |
| КОНТРОЛЛЕР ДЛЯ АВТОМОБИЛЯ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2017 |
|
RU2673323C1 |
Группа изобретений относится к силовой установке автомобиля. В способе управления силовой установкой автомобиля вырабатывают необходимый максимальный крутящий момент на сцеплении, с помощью которого крутящий момент передают между маховиком и колесами. Затем уменьшают погрешность пробуксовки, возникающую на сцеплении, регулируя передаточное отношение бесступенчатой трансмиссии, расположенной в последовательности приводных элементов между сцеплением и колесами. В другом варианте способа величина передаваемого крутящего момента соответствует необходимой величине крутящего момента маховика. Система для реализации способа содержит маховик; колеса автомобиля; сцепление для передачи крутящего момента между маховиком и колесами; бесступенчатую трансмиссию, расположенную в последовательности приводных элементов между сцеплением и указанными колесами. Также система содержит механизм конечной передачи, расположенный последовательно с указанной трансмиссией в последовательности приводных элементов между трансмиссией и колесами. Повышается надежность и плавность передачи момента от маховика к колесам. 3 н. и 14 з.п. ф-лы, 3 ил.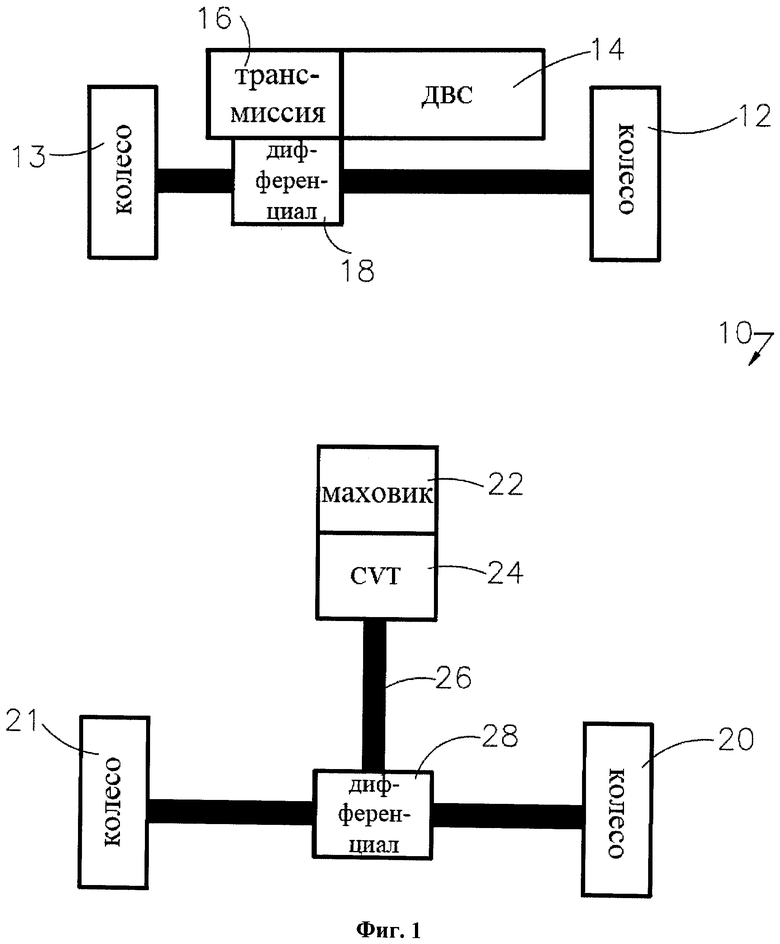
1. Способ управления силовой установкой автомобиля, в котором
(а) обеспечивают выработку необходимого максимального крутящего момента на сцеплении, с помощью которого крутящий момент передают между маховиком и колесами транспортного средства; и
(б) уменьшают погрешность пробуксовки, возникающую на сцеплении, путем регулировки передаточного отношения бесступенчатой трансмиссии, расположенной в последовательности приводных элементов между сцеплением и указанными колесами.
2. Способ по п. 1, в котором на этапе (а) используют запрошенный водителем крутящий момент колес для определения необходимого крутящего момента маховика, и используют определенный необходимый крутящий момент маховика для определения необходимого значения максимального крутящего момента сцепления.
3. Способ по п. 2, в котором на этапе (а) для определения необходимого крутящего момента маховика используют величину смещения педали газа или дроссельной заслонки двигателя.
4. Способ по п. 1, в котором на этап (а) для определения необходимого значения максимального крутящего момента сцепления используют передаточное отношение, производимое трансмиссией, и необходимый крутящий момент на выходе маховика.
5. Способ по п. 1, в котором на этапе (а) изменяют максимальный крутящий момент сцепления до необходимого значения и передают крутящий момент с помощью этого сцепления.
6. Способ по п. 1, в котором на этапе (б) определяют необходимое значение пробуксовки сцепления, определяют текущее значение пробуксовки сцепления и определяют погрешность пробуксовки, возникающую на сцеплении, как разницу между необходимой пробуксовкой сцепления и текущей пробуксовкой сцепления.
7. Способ по п. 1, в котором на этапе (б) используют контроллер для определения изменения передаточного отношения, произведенного трансмиссией, которое снижает погрешность пробуксовки, на основании значения данной погрешности.
8. Способ управления силовой установкой автомобиля, в котором:
(а) обеспечивают выработку необходимого максимального крутящего момента на сцеплении, с помощью которого крутящий момент передают между маховиком и колесами транспортного средства, при этом величина передаваемого крутящего момента соответствует необходимой величине крутящего момента маховика;
(б) определяют погрешность пробуксовки, возникающей на сцеплении; и
(в) используют бесступенчатую трансмиссию, расположенную в последовательности приводных элементов между сцеплением и указанными колесами, для снижения погрешности пробуксовки.
9. Способ по п. 8, в котором на этапе (а) используют запрошенный водителем крутящий момент для определения необходимого максимального крутящего момента маховика.
10. Способ по п. 8, в котором на этапе (а) для определения необходимого значения максимального крутящего момента сцепления используют текущее передаточное отношение, производимое трансмиссией, и необходимый крутящий момент на выходе маховика.
11. Способ по п. 8, в котором на этапе (а) изменяют максимальный крутящий момент сцепления на необходимое значение и передают крутящий момент с помощью этого сцепления.
12. Способ по п. 8, в котором на этапе (б) определяют необходимое значение пробуксовки сцепления, определяют текущее значение пробуксовки сцепления и определяют погрешность пробуксовки, возникающую на сцеплении, как разницу между необходимой пробуксовкой сцепления и текущей пробуксовкой сцепления.
13. Способ по п. 8, в котором на этапе (в) используют контроллер для определения указанного изменения передаточного отношения, производимого трансмиссией, на основании погрешности пробуксовки сцепления.
14. Система передачи энергии в силовой установке автомобиля, которая содержит:
маховик;
колеса автомобиля;
сцепление, с помощью которого крутящий момент передается между маховиком и указанными колесами;
бесступенчатую трансмиссию, расположенную в последовательности приводных элементов между сцеплением и указанными колесами;
механизм конечной передачи, расположенный последовательно с указанной трансмиссией в последовательности приводных элементов между указанной трансмиссией и указанными колесами.
15. Система по п. 14, которая дополнительно содержит:
первую шестерню, соединенную с трансмиссией с возможностью приведения в движение; и
первое зубчатое колесо, находящееся в зацеплении с первой шестерней и соединенное с механизмом конечной передачи с возможностью приведения в движение.
16. Система по п. 14, которая дополнительно содержит планетарную зубчатую передачу, содержащую центральную шестерню, установленную на маховике, кольцевую шестерню, неподвижно закрепленную без возможности поворота, водило, планетарные шестерни, установленные на водиле и находящиеся в зацеплении с центральной шестерней и кольцевой шестерней, при этом водило соединено со сцеплением с возможностью приведения в движение.
17. Система по п. 16, которая дополнительно содержит:
вторую шестерню, соединенную с водилом с возможностью приведения в движение; и
второе зубчатое колесо, находящееся в зацеплении со второй шестерней и соединенное со сцеплением с возможностью приведения в движение.
| US 2004209732 A1, 21.10.2004 | |||
| US 5679099 A, 21.10.1997 | |||
| US 6027425 A, 22.02.2000 | |||
| US 6702086 B2, 09.03.2004 |

