Настоящее раскрытие относится к области датчиков прикосновения, и в частности, хотя и не исключительно, к датчикам прикосновения, которые могут распознавать множество одновременных вводов/прикосновений пользователя.
Известны датчики прикосновения, которые также могут называться сенсорными экранами, в которых используются мультиплексированные матрицы из горизонтальных и вертикальных элементов датчика, как описано, например, в US6137427 (Binstead). Такие датчики прикосновения хорошо работают при выполнении операции одним пальцем, в случае, когда один пик идентифицируют с помощью элементов в горизонтальном направлении (х) и один пик идентифицируют в вертикальном направлении (у). В этом примере местоположение прикосновения может быть однозначно определено, как координата пальца х/у, путем соединения вместе одного пика в горизонтальном направлении и одного пика в вертикальном направлении.
Однако мультиплексированные матрицы предшествующего уровня техники имеют проблемы с правильным определением местоположения двух одновременных нажимов пальцем, поскольку при этом возникают два пика в горизонтальном (х) направлении и два пика в вертикальном (у) направлении. Проблема состоит в том, как идентифицировать, какой пик х ассоциирован с каким пиком у, как представлено на фиг.1а.
На фиг.1а схематично иллюстрируется датчик прикосновения предшествующего уровня техники с мультиплексированным 64 положением, с шестнадцатью чувствительными элементами/вводами. Восемь чувствительных элементов предусмотрены вдоль горизонтальной (х) оси датчика прикосновения и помечены номером 102 ссылочной позиции. Восемь чувствительных элементов предусмотрены вдоль вертикальной (у) оси датчика прикосновения и помечены номером 104 ссылочной позиции. Восемь горизонтальных чувствительных элементов 102 и восемь вертикальных чувствительных элементов 104 обеспечивают 64 чувствительных точек перекрещивания/пересечения.
На фиг.1а показан нажим двумя пальцами: пальцем FO 108 в местоположении пересечения 5/3 чувствительных элементов х/у; и пальцем F1 106 в местоположении пересечения 7/6 чувствительных элементов х/у. Информация, возвращаемая горизонтальными чувствительными элементами 102, графически показана под номером ссылочной позиции 110 на фиг.1а, и информация, возвращаемая вертикальными чувствительными элементами 104, графически представлена под номером ссылочной позиции 112. Как можно заметить, информация 110, возвращаемая горизонтальными чувствительными элементами 102, представляет два "пика" в горизонтальных местоположениях 5 и 7, и информация 112, возвращаемая вертикальными чувствительными элементами 104, представляет два "пика" в вертикальных местоположениях 3 и 6.
Использование информации 110, 112, возвращаемой горизонтальными и вертикальными датчиками 102, 104, приводит к неоднозначности, поскольку невозможно определить, находятся ли пальцы в местоположениях 5/3 и 7/6 (которые представляют собой правильные местоположения пальцев) или в местоположениях 5/6 и 7/3. При этом доступно недостаточно данных, при нормальном мультиплексированном сканировании х/у для определения правильных положений пальца.
Проблема неоднозначности ухудшается при наличии трех или больше пальцев, или когда несколько пальцев удерживаются неподвижно на общем элементе датчика, и один из пальцев начинает двигаться. При этом трудно определить, который из пальцев движется.
Один известный путь решения этих задач состоит в использовании немультиплексированного массива чувствительных элементов, такого как показан на фиг.1b.
Датчик 150 прикосновения по фиг.1b состоит из множества дискретных кнопок 152, каждая из которых чувствительна к прикосновению и имеет свой собственный независимый чувствительный ввод. Тридцать два чувствительных ввода показаны и обозначены ссылочной позицией 154 на фиг.1b и соответствуют тридцати двум кнопкам 152 с левой стороны датчика 150 прикосновения и тридцать два чувствительных ввода показаны под ссылочной позицией 156 на фиг.1b и соответствуют тридцати двум кнопкам 152 с правой стороны датчика 150 прикосновения. Два пальца, F0 (160) и F1 (158), однозначно идентифицируются, как находящиеся на вводах 56 и 42, соответственно. Поэтому, немультиплексированный массив по фиг.1b позволяет детектировать положения множества пальцев одновременно, без неоднозначности.
Проблема, связанная с немультиплексированным подходом, представленным на фиг.1b, состоит в большом количестве требуемых чувствительных элементов (один чувствительный элемент на кнопку 152), и сложностью соединений этих элементов. Мультиплексированный массив размером 8×8 на фиг.1а требует 16 чувствительных элементов (восемь в направлении Х и восемь в направлении Y), тогда как немультиплексированный эквивалент на фиг.1b требует 64 чувствительных элементов (один на кнопку 152). Следует понимать, что для мультиплексированного массива размером 32×32 потребуется 64 ввода, тогда как для немультиплексированного эквивалента потребуется 1024 чувствительных элементов, каждый из которых требует соединения с электронным контроллером.
Другая задача, связанная с 64 немультиплексированными отдельными чувствительными элементами (фиг.1b), состоит в том, что каждый из 64 элементов требует наличия электропроводного канала обратно к электронным схемам контроллера, и этот электропроводный канал для большинства элементов должен проходить через область просмотра/чувствительную область. Помимо того, что они визуального закрывают экран, такие дорожки оказывают малое отрицательное влияние на точность детектирования.
Представление списка или описание опубликованных ранее документов или любых документов уровня техники в описании не обязательно должно быть воспринято, как подтверждение того, что документ или предшествующий уровень техники представляет собой часть состояния уровня техники или общих общеизвестных фактов.
В следующем описании, такие термины, как заземленный, отключить и десенсибилизировать, представляют собой примеры слов, которые используют для описания принципа части десенсибилизации элемента, и могут включать в себя использование элемента управления для десенсибилизации части чувствительного элемента.
"Заземление" может включать в себя соединение с истинной землей или потенциалом земли, соединение с другим фиксированным потенциалом, соединение с фиксированным, но плавающим потенциалом (например, когда оборудование работает от батареи), соединение с антиактивным сигналом объединительной панели или другим сигналом-помехой.
Термины незаземленный, включить и сенсибилизировать представляют собой примеры слов, которые используются для описания принципа, который включает в себя сенсибилизацию части чувствительных элементов.
"Незаземленный" может включать в себя соединение с активным сигналом объединительной панели или обеспечение возможности элемента "плавать", то есть не быть резистивно-соединенным с чем-либо.
В соответствии с первым аспектом изобретения, предусмотрен датчик прикосновения, содержащий:
один или более элементов;
при этом по меньшей мере часть одного или более элементов выполнена с возможностью их десенсибилизации для определения местоположения одного или более вводов пользователя.
Десенсибилизацию по меньшей мере части одного или более элементов можно рассматривать как наложение маски на датчик прикосновения таким образом, что может быть определено местоположение одного или более вводов пользователя. Десенсибилизация по меньшей мере части одного или более элементов может обеспечивать меньшее количество чувствительных вводов, требуемых для однозначного определения местоположения одного или более вводов пользователя.
По меньшей мере часть одного или более элементов может быть выполнена с возможностью десенсибилизации для различения множества вводов пользователя. Эти элементы могут быть линейными или нелинейными.
Датчик прикосновения может представлять собой емкостной датчик прикосновения, и/или индуктивный датчик, и/или резистивный датчик, и/или датчик любого другого типа. В некоторых примерах датчик прикосновения может использовать комбинацию разных технологий датчика.
Один или более элементов могут содержать один или более чувствительных элементов. По меньшей мере, часть из одного или более чувствительных элементов может быть выполнена с возможностью их емкостного соединения с землей для десенсибилизации. По меньшей мере часть из одного или более чувствительных элементов может быть выполнена с возможностью емкостного, индуктивного или резистивного соединения с землей для их отключения. Чувствительный элемент может быть соединен с землей аналогично тому, как датчик чувствует прикосновение; например, емкостной датчик прикосновения может иметь чувствительные элементы, которые соединены емкостным образом с землей для десенсибилизации. В других вариантах осуществления часть (части) одного или более чувствительных элементов могут быть выполнены с возможностью их соединения с фиксированным напряжением, антиактивным сигналом объединительной панели или любым другим сигналом, который не является активным сигналом объединительной панели, для его десенсибилизации. По меньшей мере, часть из одного или более чувствительных элементов могут быть выполнены с возможностью их соединения с активным сигналом объединительной панели для их сенсибилизации. Датчик прикосновения может содержать переключатель, выполненный с возможностью соединения чувствительного элемента либо с землей, либо с активной объединительной панелью.
По меньшей мере, часть из одного или более чувствительных элементов могут быть выполнены с возможностью их соединения с элементом, который является электрически плавающим, для сенсибилизации. "Электрически плавающий" можно рассматривать, как не соединенный с землей, или активный сигнал объединительной панели, или любой другой вывод. Датчик прикосновения может содержать переключатель, выполненный с возможностью соединения чувствительного элемента с землей или с элементом, который является электрически плавающим.
Датчик прикосновения может содержать один или более управляемых элементов. Область управляемого элемента может быть проксимальной к области чувствительного элемента для обеспечения чувствительной области чувствительного элемента.
Один или более чувствительных элементов могут быть выровнены в другом направлении с одним или более управляемыми элементами таким образом, что чувствительные элементы и управляемые элементы пересекаются для обеспечения чувствительной области.
По меньшей мере, часть из одного или более чувствительных элементов могут быть выровнены, по существу, в том же направлении, что и по меньшей мере, часть одного или более управляемых элементов, располагаясь к ним проксимально, для обеспечения чувствительной области.
Применение управляемых элементов и чувствительных элементов может обеспечить то, что потребуется меньшее количество чувствительных вводов, чем необходимо в предшествующем уровне техники. Датчик прикосновения может содержать х чувствительных вводов, где х равно количеству чувствительных элементов, что может составлять, например, количество столбцов или количество рядов датчика прикосновения. Варианты осуществления изобретения могут обеспечить то, что чувствительные элементы будут требоваться только в одном измерении двумерного датчика прикосновения. Ввод пользователя вдоль первого измерения может определяться с помощью чувствительных элементов; а ввод пользователя вдоль второго измерения может различаться путем сенсибилизации или десенсибилизации этих частей чувствительных элементов, которые могут выполняться последовательно. Сенсибилизация или десенсибилизация частей чувствительных элементов может выполняться путем включения или отключения одного или более управляемых элементов.
Направление чувствительных элементов может, по существу, быть перпендикулярным направлению управляемых элементов для применения, например, в качестве клавиатуры или сенсорного экрана. В других вариантах применения компоновка может быть более сложной или специализированной.
Управляемые элементы могут быть выполнены с возможностью их отключения/заземления таким образом, что чувствительные области либо сенсибилизируются, либо десенсибилизируются.
Датчик прикосновения может быть выполнен с возможностью соединения управляемого элемента с землей для десенсибилизации соответствующей чувствительной области. Соответствующие чувствительные области одного или более чувствительных элементов могут быть десенсибилизированы, когда они соединены через емкость с управляемым элементом, который соединен с землей.
Датчик прикосновения может быть выполнен с возможностью оставлять управляемый элемент электрически плавающим для обеспечения полной чувствительности соответствующих чувствительных областей.
Датчик прикосновения может содержать переключатель, выполненный с возможностью соединения управляемого элемента с землей для отключения соответствующих чувствительных областей; или оставления управляемого элемента, электрически плавающим для включения управляемого элемента, обеспечивая, таким образом, полную чувствительность чувствительных областей.
Датчик прикосновения может быть выполнен с возможностью соединения управляемого элемента с активным сигналом объединительной панели для обеспечения полной чувствительности соответствующих чувствительных областей.
Датчик прикосновения может содержать переключатель, выполненный с возможностью соединения управляемого элемента с землей для десенсибилизации соответствующих чувствительных областей или соединения управляемого элемента с активным сигналом объединительной панели для сенсибилизации соответствующих чувствительных областей.
Для каждого управляемого элемента может быть предусмотрен переключатель.
Переключатель или переключатели могут представлять собой электронные переключатели. Таким образом, функционирование датчика прикосновения может выполняться автоматически и может обеспечивать чувствительный датчик прикосновения.
Датчик прикосновения может содержать контроллер. Контроллер может быть выполнен с возможностью управлять переключателем или переключателями в соответствии с информацией, принятой из одного или более чувствительных элементов.
Контроллер может быть выполнен с возможностью выполнять операции с этими переключателями для периодического отключения/заземления одного или более управляемых элементов или для иного управления этими управляемыми элементами. Если один или только некоторые управляемые элементы выключены/заземлены одновременно, то это можно рассматривать, как обеспечение узкой маски. Контроллер может быть выполнен с возможностью оперировать переключателями или иначе управлять управляемыми элементами для периодического отключения/заземления всех управляемых элементов за исключением одного. Контроллер может быть выполнен с возможностью включения одного управляемого элемента в свою очередь. Это можно рассматривать, как обеспечение широкой маски.
Контроллер может быть выполнен с возможностью определения, который из управляемых элементов должен быть выключен/заземлен, для различения множества вводов пользователя, представленных сигналами, поступающими обратно от одного или более чувствительных элементов.
Контроллер может быть выполнен с возможностью отключения/заземления ранее включенного управляемого элемента, который пересекается с чувствительным элементом в местоположении, которое соответствует местоположению одного из множества вводов пользователя. Контроллер может быть выполнен с возможностью управления управляемым элементом для десенсибилизации ранее сенсибилизированной соответствующей чувствительной области, которая соответствует местоположению одного из множества вводов пользователя. Например, если ввод пользователя принят в местоположениях, соответствующих двум разным включенным управляемым элементам, тогда контроллер может заземлять/отключать один из ранее включенных управляемых элементов таким образом, что два ввода данных пользователем могут быть распознаны.
Контроллер может быть выполнен с возможностью оперировать всеми элементами, как чувствительными элементами, до тех пор, пока не будет принято множество вводов пользователя, или до тех пор, пока множество вводов пользователя не перестанут быть различимыми. Контроллер может затем оперировать одним или более элементами как управляемыми элементами для различения множества вводов пользователя.
Контроллер может быть выполнен с возможностью управления управляемыми элементами для сенсибилизации всех чувствительных элементов, и контроллер может быть выполнен с возможностью многократно:
принимать информацию от чувствительных элементов; и
в ответ на информацию, принятую от чувствительных элементов, управлять управляемыми элементами для десенсибилизации соответствующих чувствительных областей;
до тех пор пока множество вводов пользователя не станут различимыми. Контроллер может быть выполнен с возможностью заземления бывшего/предыдущего чувствительного элемента в местоположении, которое соответствует одному из множества вводов пользователя. Контроллер может быть выполнен с возможностью изменения функционирования элемента от чувствительного элемента к управляемому элементу для различения множества вводов пользователя. Например, если ввод пользователя принимают в местоположениях, соответствующих двум разным вводам х сенсорного определения или двум разным вводам у сенсорного определения, тогда контроллер можно использовать/оперировать одним из этих чувствительных элементов как управляемым элементом и можно заземлять/отключать его так, чтобы эти два ввода пользователя можно было распознавать.
Все чувствительные элементы также могут быть выполнены как управляемые элементы, а контроллер может быть выполнен с возможностью управления управляемыми элементами таким образом, что одна область сенсорного определения между двумя управляемыми элементами будет выполнена чувствительной к прикосновению.
Сигналы, поступающие обратно от одного или более чувствительных элементов, могут быть приняты, когда ни один из управляемых элементов не выключен/не заземлен. Сканирование, при котором ни один из управляемых элементов не выключен/не заземлен, может называться сканированием х/у и может включать в себя все элементы, используемые как чувствительные элементы. Такой пример может обеспечивать быструю работу по детектированию, когда палец прикасается к экрану. Сканирование, исключающее неоднозначность, может выполняться только тогда (может рассматриваться необходимым только тогда), когда два или более пальца прикасаются к экрану.
Контроллер может быть выполнен с возможностью включения всех управляемых элементов, и контроллер затем выполнен с возможностью многократного:
приема информации от чувствительных элементов; и
в ответ на информацию, принимаемую от чувствительных элементов, заземлять различные комбинации этих элементов и/или увеличивать или уменьшать количество выключенных управляемых элементов до тех пор, пока множество вводов пользователей не станет различимым.
Это пример того, как маска может быть постепенно увеличена в размерах до тех пор, пока множество вводов пользователей не будут различимыми, и может обеспечивать возможность выполнения последовательной аппроксимации и поиска с делением пополам.
В некоторых вариантах осуществления, один или более элементов могут никогда не использоваться для определения прикосновения, но могут быть постоянно выполнены как управляемые (маскирующие) элементы. Управляемые элементы могут соединяться либо с землей, либо с активной объединительной панелью, и таким образом могут обеспечивать возможность эффективного распознавания множества вводов пользователей с меньшим количеством чувствительных элементов.
В других вариантах осуществления, один или более чувствительных элементов могут быть выполнены так, что они одновременно являются чувствительными элементами и управляющими элементами, и в разные моменты времени могут быть либо тем, либо другим.
В некоторых вариантах осуществления все элементы могут представлять собой управляющие элементы с одним универсальным чувствительным элементом. Контроллер может быть выполнен с возможностью периодического отключения/заземления всех управляемых элементов, кроме двух, так что единственное пересечение между двумя включенными/незаземленными управляемыми элементами выполнено чувствительным к прикосновению. Два управляемых элемента, которые не отключены, могут проходить в разных направлениях, например они могут быть перпендикулярны друг другу.
В примере, в котором как элементы ряда, так и элементы столбца могут поочередно быть и управляемыми элементами, и чувствительными элементами, и либо элементы ряда представляют собой чувствительные элементы, в то время как элементы столбца представляют собой управляемые элементы, либо элементы столбца представляют собой чувствительные элементы, в то время как элементы ряда представляют собой элементы управления, тогда один чувствительный элемент и один элемент управления могут быть выбраны последовательно один за другим, так что становится возможным однозначно определять каждое пересечение между элементом столбца и элементом ряда. Таким образом, для сенсорной площадки 8×8, можно по-отдельности определять каждое из 64 пересечений. Все определяемые вводы можно направлять в одну чувствительную входную схему, поскольку в каждый момент времени будет включен только один из чувствительных элементов.
Поскольку оба чувствительных способа, описанных выше (то есть способ с чувствительными рядами с управляемыми столбцами/сканированием и способ с чувствительными столбцами с управляемыми рядами/сканированием), измеряют одно и то же, но двумя разными путями, тогда два способа определения могут использоваться для улучшения точности детектирования. Результаты одного сканирования могут сравниваться с результатами другого сканирования для определения, представляют ли они или нет одни и те же вводы пользователя, в результате чего повышается степень достоверности результатов. В качестве альтернативы, оба результата могут быть скомбинированы вместе для получения композитного результата с большей точностью. Эффект такого подхода это можно рассматривать, как аналогичный подходу "двойной бухгалтерии".
В качестве альтернативы, если весь ряд или столбец элементов должны быть определены точно в одно и то же время, тогда одна схема сенсорного ввода потребуется для каждого из рядов или столбцов. Это потребует количества вводов, равное количеству рядов плюс количество столбцов. Это составит 16, например, для сенсорной панели 8×8. В примере, описанном в этом абзаце, однако, ряды и столбцы никогда одновременно не используются как датчики, поэтому данное количество может быть уменьшено путем направления вводов в рядах и столбцах в общий банк схем ввода. Это может потребовать количество вводов, равное большему из количеств рядов или столбцов, что составляет 8 для сенсорной панели 8×8. В этих примерах все сенсорные вводы могут быть направлены в одну схему сенсорного ввода, поскольку в каждый момент времени только один из чувствительных элементов может быть включен.
Компромисс между двумя крайностями, состоящий в использовании отдельной входной цепи для каждого ввода и одной входной цепи для обслуживания всех вводов, состоит в том, чтобы иметь малый банк схем ввода, которые могут выполнять сенсорное определение точно в одно и то же время, например четыре. Вводы рядов или столбцов могут направляться в этот общий банк из четырех схем сенсорного ввода.
Чувствительные элементы и управляемые элементы могут представлять собой проводные элементы. Участок чувствительного элемента может проходить, по существу, параллельно и, по существу, соседствовать с участком управляемого элемента в области датчика прикосновения, что участки чувствительного элемента и управляемого элемента, которые соответствуют друг другу, обеспечивают чувствительные области.
Контроллер может быть выполнен с возможностью управления управляемыми элементами так, что все чувствительные элементы чувствительны при отсутствии ввода пользователя или при приеме одиночного ввода пользователя.
Контроллер может быть выполнен с возможностью обеспечения действия всех управляемых элементов в качестве чувствительных входов, когда прикосновение не было детектировано. В некоторых вариантах осуществления контроллер может включать все управляемые элементы так, что они остаются чувствительными входами, даже когда сенсорный ввод, представляющий одиночный ввод пользователя, будет принят, и при этом не возникает неоднозначная ситуация. Таким образом, датчик прикосновения может эффективно использоваться с точки зрения ресурсов обработки и времени срабатывания, поскольку "маскирование", например, путем заземления выбранных элементов, выполняют только, если и когда это требуется.
Контроллер может быть выполнен с возможностью реализации одного из множества режимов работы в соответствии с информацией, принятой из одного или более чувствительных элементов, при этом датчик прикосновения содержит х элементов, проходящих в первом направлении, и у элементов, проходящих во втором направлении. Режимы работы могут включать в себя одно или более:
и элементы х, и элементы у представляют собой чувствительные элементы, которые являются чувствительными ко всем вводам;
и элементы х, и элементы у представляют собой чувствительные элементы, которые отслеживают палец, уже детектированный при предыдущем сканировании;
элементы х представляют собой чувствительные элементы, а элементы у представляют собой управляемые элементы, выполняющие сканирование всех вводов;
элементы у представляют собой чувствительные элементы, а элементы х представляют собой управляемые элементы, которые выполняют сканирование всех вводов;
представленные выше два режима чередуют друг с другом;
элементы х представляют собой чувствительные элементы, а элементы у представляют собой управляющие элементы, отслеживающие палец или пальцы, уже детектированные за предыдущее сканирование;
элементы у представляют собой чувствительные элементы, а элементы х представляют собой управляющие элементы, сканирующие палец или пальцы, уже детектированные при предыдущем сканировании;
управляемые элементы можно маскировать путем заземления только одного элемента;
управляемые элементы можно маскировать путем заземления всех элементов, кроме одного:
управляющие элементы можно маскировать путем заземления блоков элементов;
управляющие элементы можно маскировать путем заземления всех, кроме одного блока элементов;
блоки элементов могут быть маскированы в режиме последовательной аппроксимации;
блоки элементов могут быть маскированы в последовательном режиме;
блоки элементов могут быть маскированы в порядке, зависящем от результатов предыдущего сканирования;
элементы х и некоторые элементы у могут быть управляемыми элементами, в то время как остальной элемент(ы) у представляют собой чувствительные элементы;
элементы у и некоторые элементы х могут быть управляемыми элементами, в то время как остальной элемент (элементы) х представляют собой чувствительные элементы. Чувствительный элемент может содержать полоску металла или провода (или любого проводника), соединенного со схемой детектирования прикосновения.
Чувствительные и/или управляемые элементы могут быть выполнены достаточно широкими таким образом, что они примыкают друг к другу, но не образуют электрический контакт друг с другом и могут закрывать весь экран.
Один или более элементов могут быть выполнены с возможностью определения ввода пользователя, используя динамическую или проецируемую емкость.
Может быть предусмотрен датчик прикосновения, содержащий провод, кабель или любой другой электрический соединитель, соединенный с одним или более элементами. Провод, кабель или электрический соединитель могут соединять элемент, например, с чувствительной схемой. Датчик прикосновения также может содержать экран, предусмотренный в непосредственной близости к проводу таким образом, что провод не является чувствительным к прикосновению. Экран может быть предусмотрен для того, чтобы, в случае необходимости, управляемым образом десенсибилизировать провод так, чтобы любая вводимая вручную помеха в отношении провода не влияла на определение прикосновения, выполняемого одним или больше элементами. Экран может представлять собой заземленный провод или любой другой заземленный электрический проводник. Следует понимать, что варианты осуществления, которые содержат экран, не обязательно должны иметь элементы, которые выполнены с возможностью их десенсибилизации, поскольку преимущества, ассоциированные с экраном, могут быть достигнуты независимо от десенсибилизированных элементов.
Датчик прикосновения может содержать контроллер, и один или более элементов могут содержать первый набор из одного или более элементов и второй набор из одного или более элементов. Как первый набор, так и второй набор элементов могут быть выполнены с возможностью их работы в качестве как чувствительных, так и как управляющих элементов. Контроллер может быть выполнен с возможностью определения предварительного местоположения одного или более вводов пользователя, используя первый набор элементов в качестве чувствительных элементов, и второй набор элементов в качестве управляемых элементов, и определять вторичное местоположение одного или более вводов пользователя, используя первый набор элементов в качестве управляемых элементов и второй набор элементов в качестве чувствительных элементов. Контроллер может дополнительно быть выполнен с возможностью определения составного местоположения одного или больше вводов пользователя, в соответствии с предварительным местоположением и вторичным местоположением. Такие варианты осуществления могут обеспечивать особенные преимущества для проводных элементов, где емкостная связь между элементами может быть ограничена. Один или оба из первых и вторых наборов элементов могут содержать один или более элементов.
Может быть предусмотрено электронное устройство, содержащее любой датчик прикосновения, раскрытый здесь. Электронное устройство может представлять собой малый или очень большой сенсорный экран, складную сенсорную интерактивную электронную книгу, выполненную с "толщиной бумаги", мобильный телефон, карманный персональный компьютер, переносной компьютер или музыкальный проигрыватель, где корпус и/или экран являются интерактивными для прикосновения, интерактивную при прикосновении бетонную плиту, деревянную рабочую поверхность, обои, плитки для полов, электронные игровые таблицы для множества пользователей, таблицы для интерактивных конференций, пульты управления или любое устройство, требующее присутствия интерактивной поверхности, работающей при одном или множестве прикосновений пользователей.
Любой датчик прикосновения, раскрытый здесь, может быть выполнен с возможностью работы через стекло, например витрину, включая в себя окна с двойными стеклами.
В соответствии с дополнительным аспектом изобретения, предложен способ выполнения операций с датчиком прикосновения, причем датчик прикосновения содержит один или более элементов, при этом способ содержит этапы, на которых:
Десенсибилизируют, по меньшей мере, часть одного или более элементов для определения местоположения одного или более вводов пользователя.
Может быть предусмотрена компьютерная программа, которая при выполнении ее в компьютере вызывает выполнение компьютером любого устройства, включающего в себя датчик прикосновения, устройство или сенсорный экран, или выполнения любого способа, раскрытого здесь.
Компьютерная программа может быть выполнена как программное обеспечение, и компьютер можно рассматривать как любые соответствующие аппаратные средства, включающие в себя цифровой сигнальный процессор, микроконтроллер, и вариант осуществления в постоянном запоминающем устройстве (ROM), стираемом программируемом постоянном запоминающем устройстве (EPROM) или электрически стираемом программируемом постоянном запоминающем устройстве (EEPROM), в качестве не ограничительных примеров. Программное обеспечение может представлять собой любую компонующую программу.
Компьютерная программа может быть предоставлена на считаемом в компьютере носителе информации, таком как диск или запоминающее устройство, или может быть воплощена как переходные сигналы. Такие переходные сигналы могут быть загружены через сеть, включая в себя загрузку через Интернет.
Далее будет представлено описание, только в качестве примера, со ссылкой на приложенные чертежи, на которых:
На фиг.1а и 1b иллюстрируются датчики прикосновения предшествующего уровня техники;
на фиг.2 показан датчик прикосновения в соответствии с вариантом осуществления изобретения;
на фиг.3 показано как управляемые элементы могут использоваться в качестве маски в соответствии с вариантом осуществления изобретения;
на фиг.4 показано как узкая маска может использоваться в соответствии с вариантом осуществления изобретения;
на фиг.5 показаны четыре других способа применения маски в соответствии с вариантом осуществления изобретения;
на фиг.6 показан вид сверху маскируемого сенсорного экрана в соответствии с вариантом осуществления изобретения;
на фиг.7 показан вид в поперечном сечении через сенсорный экран по фиг.6;
на фиг.8 показана емкостная связь в соответствии с вариантом осуществления изобретения;
на фиг.9 показана принципиальная схема в соответствии с вариантом осуществления изобретения;
на фиг.10 показан маскируемый сенсорный экран в соответствии с вариантом осуществления изобретения;
на фиг.11 показан одиночный элемент, чувствительный к прикосновению, и электронно переключаемая маска из восьми элементов, состоящая из восьми управляемых элементов, в соответствии с вариантом осуществления изобретения;
на фиг.12 показан одиночный чувствительный элемент прикосновения и электронно-переключаемая маска из восьми элементов, состоящая из восьми управляемых элементов, в соответствии с другим вариантом осуществления изобретения;
на фиг.13 показан одиночный чувствительный элемент прикосновения и электронно-переключаемая маска из восьми элементов, состоящая из восьми управляемых элементов, в соответствии с другим вариантом осуществления изобретения;
на фиг.14а и 14b показан одиночный, механически или электрически оперируемый маскирующий переключатель прикосновения в соответствии с вариантом осуществления изобретения;
на фиг.15а и 15b иллюстрируются данные, возвращенные из датчика прикосновения по фиг.6;
на фиг.16 показано как узкая маска может использоваться, чтобы снять неоднозначность двух пальцев в соответствии с вариантом осуществления изобретения;
на фиг.17 показано, как узкая маска может использоваться, чтобы снять неоднозначность двух пальцев в соответствии с еще одним вариантом осуществления изобретения;
на фиг.18 показан экран из тонкой проволоки в соответствии с вариантом осуществления изобретения;
на фиг.19 показан экран из тонкой проволоки в соответствии с другим вариантом осуществления изобретения;
на фиг.20 показан экран из тонкой проволоки в соответствии с еще одним другим вариантом осуществления изобретения;
на фиг.21 показан сенсорный экран в соответствии с вариантом осуществления изобретения;
на фиг.22 показан сенсорный экран в соответствии с еще одним другим вариантом осуществления изобретения;
на фиг.23 показан сенсорный экран в соответствии с дополнительным вариантом осуществления изобретения;
на фиг.24 показан индуктивный датчик прикосновения в маске в соответствии с вариантом осуществления изобретения.
Один или больше вариантов осуществления, раскрытых здесь, относятся к датчику прикосновения, предназначенному для определения ввода пользователя. Датчик прикосновения содержит один или больше элементов и часть одного или больше элементов выполнена с возможностью их десенсибилизации для определения местоположения ввода пользователя и возможностью распознавать множество одновременных вводов пользователя. Такие датчики прикосновения можно назвать маскированными датчиками прикосновения. Существуют разные способы, в соответствии с которыми элементы могут быть десенсибилизированы, как описано более подробно ниже, и в некоторых вариантах осуществления элементы могут называться "исполнительными элементами" или "управляемыми элементами", поскольку ими можно управлять или их можно переключать либо на землю или на активный сигнал объединительной панели с помощью контроллера, для того чтобы сенсибилизировать и десенсибилизировать соответствующие чувствительные элементы. Такие управляемые элементы также могут использоваться как чувствительные элементы, когда их не используют как управляемые элементы.
На фиг.2 иллюстрируется датчик 200 прикосновения, в соответствии с вариантом осуществления изобретения. Датчик прикосновения содержит восемь элементов 204, которые размещены вдоль вертикального (у) направления датчика 200 прикосновения, и восемь элементов 202, которые размещены вдоль горизонтального (х) направления датчика 200 прикосновения. Каждый из вертикальных элементов 204 продолжается в горизонтальном направлении, хотя они называются вертикальными элементами, поскольку они размещены на расстоянии друг от друга в вертикальном направлении. Аналогичное условие наименования используется для горизонтальных элементов 202.
В данном примере вертикальные элементы 204 могут быть отключены для того, чтобы различать множество вводов пользователей. Вертикальные элементы могут называться "исполнительными элементами" или "управляемыми элементами".
Горизонтальные элементы 202 в примере на фиг.2 представляют собой чувствительные вводы, которые выполнены с возможностью идентификации местоположения ввода пользователя в горизонтальном (х) направлении.
Также на фиг.2 показаны два нажатия пальцем (F0 206 и F1 208), представляющие ввод пользователя. Первое нажатие F0 206 пальцем находится в местоположении 5,3, и второе нажатие F1 208 пальцем находится в местоположении 7,6. Как описано выше, мультиплексированный массив предшествующего уровня техники может не быть способен однозначно определять местоположение двух нажатий 206 пальцем 208. На фиг.2 два пальца могут размещаться в четырех возможных местоположениях 5/6, 5/3, 7/6 или 7/3.
Когда управляемый элемент 204 заземлен/выключен, тогда ни одно из пересечений между этим управляемым элементом 204 и всеми чувствительными элементами 202 не генерирует выход, представляющий прикосновение. Таким образом, десенсибилизируются все области чувствительных элементов 202, которые пересекаются с заземленным управляемым элементом 204. Варианты осуществления изобретения позволяют заземлять управляемый элемент 204, который ассоциирован с вертикальным местоположением нажатия пальца таким образом, что выход, генерируемый чувствительными элементами 202, больше не включает в себя данные, представляющие нажатия пальца на заземленный управляемый элемент 204. На фиг.2 заземление управляемого элемента у6 исключает возможность любого из чувствительных элементов детектировать палец вдоль этого элемента, поэтому палец F1 208 будет не детектируемым. Палец F0 206, однако, все еще может быть детектирован без неоднозначности в месте пересечения с управляемым элементом у3. Палец F0, поэтому, находится в местоположении 5/3 и тому подобное, F1, поэтому, должен находиться в местоположении 7/6. Например, при одновременном нажатии двумя пальцами только один управляемый элемент требуется заземлить, чтобы обеспечить возможность однозначного определения местоположения нажатий пальцами. Следует понимать, что разное количество управляемых элементов 204 может потребоваться заземлить, возможно, в разные моменты времени, для того чтобы однозначно различить более, чем два одновременных нажатия пальца.
Более подробные примеры того, как управляемые элементы 204 можно использовать для различия между множеством вводов пользователя, представлены ниже.
В некоторых из примеров, описанных здесь, отключение элемента может быть описано как заземление элемента. Как описано повсеместно здесь, заземление является не единственным способом отключения элемента и следует также понимать, что в любых примерах, которые здесь относятся к заземлению элемента, также могут быть предусмотрены различные средства для отключения элемента. Например, отключение элемента может быть воплощено путем резистивного или емкостного соединения электропроводного элемента с действительным заземлением или землей, с плавающим заземлением, которое используется, как универсальное опорное соединение, или с фиксированным напряжением, которое может составлять или может не быть равно ноль вольт. В качестве альтернативы, антиактивный сигнал объединительной панели может использоваться для десенсибилизации чувствительного элемента, и антиактивный сигнал объединительной панели может быть идентичен активному сигналу объединительной панели, но точно на 180 градусов вне фазы с ним. Аналогично, включенный элемент можно называть "незаземленным" элементом.
В одном или больше способов, в соответствии с вариантом осуществления изобретения, только 16 проводников требуется направить в контроллер для массивов из 64 элементов, и ни один из электропроводных маршрутов, вероятно, не должен быть пропущен через область просмотра.
В соответствии с мультиплексированной компоновкой предшествующего уровня техники, как показано на фиг.1а, когда прикасаются к вертикальному элементу датчика, нет никакой возможности определить, к какому элементу прикоснулся палец, без информации из горизонтальных элементов датчика. В данном раскрытии, однако, описано, как возможно избирательно сенсибилизировать или десенсибилизировать часть этого вертикального элемента таким образом, чтобы малая часть была сенсибилизированной или малый участок был только не сенсибилизирован, и как возможно под электронным управлением перемещать это чувствительное/нечувствительное пятно вверх и вниз так, чтобы чувствительный элемент всегда точно знал, где находится пятно, обеспечивая возможность детектирования положения для этого элемента одного или больше пальцев.
Предполагая, что компоновка по фиг.1а мультиплексированного датчика прикосновения предшествующего уровня техники выполнена, как простой емкостной датчик типа х/у, где восемь элементов х и восемь элементов у все представляют собой чувствительные входы, при этом было определено, что заземление любого одного из входов у будет десенсибилизировать пути входов х, где они пересекаются с заземленным элементом у. В режиме детектирования с динамической емкостью, как описано в патенте US 5844506, только на части элементов х, расположенных над заземленным элементом у, будет оказано влияние, и остальные элементы х сохраняют свою полную чувствительность.
Этот эффект может быть дополнительно улучшен путем соединения всех входов с сигналом, выведенных из сигнала емкостного сенсорного определения, когда вводы определения не определяют или они заземлены. Аналогично, путем заземления всех элементов у, за исключением одного, определяют, что вся длина элементов х будет десенсибилизирована, за исключением частей, где они пересекают элемент у, который не был заземлен.
Это явление можно эксплуатировать для однозначного детектирования положения множества пальцев на мультиплексированном датчике прикосновения такого типа.
Например, на фиг.2 показан палец 206, который прикасается к вертикальному чувствительному элементу х5 в месте пересечения с горизонтальным чувствительным элементом у3. В результате последовательного заземления всех элементов у, кроме одного, и, таким образом, только в результате сенсибилизации одного пересечения одновременно, становится возможным детектировать палец, когда выбран вариант сенсибилизации места пересечения с горизонтальным элементом 3, представляющий, что палец находится в месте пересечения с горизонтальным элементом 3. Когда сенсибилизировано пересечение с у6, палец не может быть детектирован на датчике х5.
Палец F1 мог бы быть найден элементом х7 датчика, когда место пересечения с элементом у6 сенсибилизировано, но палец не может быть найден элементом х7, когда место пересечения с у3 сенсибилизировано.
Если бы оба пальца прикасались к вертикальному чувствительному элементу 5 одновременно, но в разных местах пересечения, было бы возможно точно определять наличие и положение обоих пальцев, когда ассоциированный горизонтальный элемент разрешает быть чувствительной этой части вертикального элемента.
В качестве альтернативы сенсибилизации вертикального чувствительного элемента 5, последовательно по одному пересечению одновременно в каждом из восьми пересечений с горизонтальными элементами, вместо этого, элемент может быть последовательно десенсибилизирован по одному пересечению одновременно. Палец может быть детектирован в каждом возможном варианте, за исключением случаев, когда пересечение с горизонтальным элементом 3 десенсибилизировано. Поэтому, можно сделать вывод, что палец находится на пересечении с горизонтальным элементом 3.
В случае, когда двумя пальцами прикасаются к вертикальному чувствительному элементу 5, обоими одновременно, но в разных местах пересечения, тогда присутствие, по меньшей мере, одного пальца всегда будет оставаться детектируемым, и, поэтому, неразличимым в соответствии с этим процессом. Однако, поскольку используемая технология сенсорного определения задает считывание "постоянно изменяющейся силы прикосновения", в отличие от двоичного "прикоснулся или не прикоснулся" считывания, тогда уменьшение силы прикосновения могло бы быть детектировано, когда соответствующее пересечение будет десенсибилизировано, и эту информацию можно использовать для детектирования положения более чем одного пальца. Если достигается полная десенсибилизация, тогда для двух аналогичных прикосновений пальца сила сигнала может быть уменьшена или ослаблена на приблизительно 50%, например, когда один из них был маскирован.
Обе эти технологии можно использовать поочередно для подтверждения результатов других или они могут быть скомбинированы для получения более высокой степени точности.
В некоторых обстоятельствах вертикальные чувствительные элементы и горизонтальные чувствительные элементы могут быть взаимозаменяемыми. Вертикальные элементы могут быть чувствительными, в то время как горизонтальные элементы могут быть сенсибилизирующими/десенсибилизирующими. Затем горизонтальные элементы могут действовать как датчики, в то время как вертикальные элементы действуют как сенсибилизаторы/десенсибилизаторы. Результаты обоих этих вариантов выбора также можно затем использовать для их подтверждения и усиления точности детектирования.
На фиг.2 показан датчик прикосновения, где вертикальный и горизонтальный элементы можно использовать таким образом, чтобы в исходном состоянии оба они использовались как чувствительные элементы для определения, произошло ли прикосновение каким-либо из пальцев к экрану. Если более чем одно прикосновение будет определено в любом из чувствительных массивов, тогда процессы сенсибилизации или десенсибилизации, описанные выше, можно использовать. Процесс или процессы можно использовать избирательно вокруг областей экрана, где были детектированы пальцы, для устранения неоднозначных прикосновений, вместо сканирования по всему экрану.
В вариантах осуществления настоящего раскрытия используется технология избирательной сенсибилизации и/или десенсибилизации различных частей мультиплексированной кнопочной панели или сенсорного экрана, для точного определения, и без неоднозначности, положений одного или больше пальцев, прикасающихся к этой кнопочной панели или сенсорному экрану. Также можно использовать одну и ту же технологию для устранения необходимости в одном из наборов сенсорных элементов.
Ту же технологию также можно использовать в вариантах приложения, не содержащих кнопочную панель/сенсорный экран, где чувствительные элементы могут быть расположены или могут не быть расположены в виде регулярного массива, но могут быть представлены в виде нерегулярной или случайной компоновки.
Способ, используемый для избирательной сенсибилизации или десенсибилизации мультиплексированного сенсорного экрана, может меняться в зависимости от разных технологий. Резистивные сенсорные экраны, которые основаны на механическом движении, могут использовать механическое решение, тогда как индуктивные и емкостные сенсорные экраны вероятно, хотя и необязательно, используют индуктивное или емкостное решение, соответственно.
Резистивные сенсорные экраны
Резистивные сенсорные экраны с четырьмя и пятью проводами основаны на механическом контакте между двумя проводящими слоями для детектирования нажатия пальца. Проводящие слои обычно разделены друг от друга массивом с очень небольшими непроводящими промежутками. Разность потенциалов между различными такими проводами обозначает положение пальца. Больше, чем один палец приводит к получению разности потенциалов, на основании которой трудно получить положения пальца. Соответствующим образом разработанный механический барьер в виде матрицы с электронным управлением можно использовать для предотвращения или разрешения выполнения выбранного контакта, в результате обеспечивается то, что только один палец одновременно находится в контакте между этими двумя электропроводными слоями. Также можно использовать материалы, деформируемые под действием электрического тока или магнитного поля.
Индуктивные сенсорные экраны
Индуктивные сенсорные экраны можно использовать в вариантах осуществления изобретения, и ниже представлен пример со ссылкой на фиг.24. Следует понимать, что особенности, которые описаны здесь, которые относятся к емкостным датчикам прикосновения, также могут иметь эквивалентные свойства/функция в индуктивных датчиках или в любых других типов датчиков.
Емкостные датчики прикосновения
Варианты осуществления изобретения относятся к емкостной технологии для избирательной сенсибилизации или десенсибилизации емкостного датчика прикосновения.
В патенте США 4954823 (Binstead) раскрыт очень чувствительный, точный и стабильный способ детектирования положения пальца, выполняющего операции с кнопочной панелью через очень толстое стекло (Патент США 4954823). Детектированный сигнал здесь настолько слабый, что легко может быть скрыт изменениями условий окружающей среды, такими как температура и влажность. Используя информацию о том, как пальцы работают с кнопочной панелью или сенсорным экраном, разделяющую глобальные изменения от локальных изменений, используя другие кнопки в качестве опорных и используя только изменения емкости, в отличие от абсолютных значений емкости, был сформирован очень чувствительный способ детектирования емкости, который был защищен от изменений окружающей среды. При включении питания или после сброса значение сохраняют для каждого ввода и его используют как опорное значение "при отсутствии прикосновения" для этого ввода. Это значение постоянно сравнивают с текущим значением для этого ввода и выполняют последовательное приращение или последовательное уменьшение, для отслеживания текущего значения и компенсации, таким образом, долговременного дрейфа.
Динамический способ для измерения очень малых изменений емкости затем был назван "проецируемой емкостью" и такая "проецируемая емкость" может использоваться в вариантах осуществления настоящего изобретения.
Более поздний патент (Патент США 5844506 (Binstead) раскрывает, как можно предотвратить взаимные помехи чувствительных элементов, из-за перекрестных соединений, если бы они были соединены с активным сигналом объединительной панели, в случае, когда отсутствует сенсорное определение. Активный сигнал объединительной панели является тем же, что и сигнал чувствительного элемента (элементов), и идеально находится точно в фазе с ним и имеет аналогичную форму колебаний и амплитуду. При этом нет необходимости, чтобы он имел тот же мгновенный потенциал. При сравнении с заземлением элементов, когда они не выполняют сенсорное определение, определили, что полученный в результате сенсорный экран был существенно более чувствительным и имел существенно уменьшенные "перекрестные наводки" между чувствительными элементами. И снова, такие технологии можно использовать в вариантах осуществления настоящего изобретения.
В условиях детектирования с "динамической емкостью" или "проецируемой емкостью" определили, что части чувствительных элементов могут быть избирательно десенсибилизированы, если заземленный элемент продолжается рядом вдоль частей этого чувствительного элемента. Части того же чувствительного элемента, которые не имеют заземленный провод рядом с ними, но имеют элемент с плавающим напряжением или элемент, который соединен с активным сигналом объединительной панели, рядом с ними, могут сохранять свою чувствительность.
Когда потенциал ранее заземленного элемента начинает плавать или его соединяют с активным сигналом объединительной панели, тогда часть чувствительного элемента, которая ранее была нечувствительна, восстанавливает свою чувствительность. Это работает для всех форм чувствительных элементов, независимо от того, являются ли они линейными, изогнутыми, хаотичными, сетчатыми, древовидными, 2- или 3-мерными, проводниками в виде тонких следов, или простыми, или сложными структурами в виде пластин и т.д.
Заземление может быть воплощено, используя резистивное или емкостное соединение электропроводного элемента с истинным заземлением или землей, с землей с плавающим потенциалом, которая используется, как универсальное опорное заземление, что может быть полезным для устройств, работающих от батареи, или с фиксированным напряжением, которое может быть или может не быть равно ноль вольт.
В качестве альтернативы заземлению можно использовать антиактивный сигнал объединительной панели для десенсибилизации чувствительного элемента. В идеале, этот сигнал идентичен активному сигналу объединительной панели, но смещен точно на 180 градусов по фазе относительно него. Другие составляющие помеху или десенсибилизирующие сигналы также можно использовать, но с пониженной эффективностью.
Поскольку сигналы на двух пластинах стандартного конденсатора всегда идентичны, когда прикладывают сигнал активной объединительной панели к одной пластине и сигнал сенсорного определения прикладывают к другой пластине, в эффекте между этими двумя пластинами не образуется емкостное соединение. Эту особенность часто используют при передаче высокочастотных сигналов по коаксиальному кабелю, при этом экран возбуждают активным сигналом объединительной панели, вместо его заземления. Это приводит к очень малому затуханию сигнала даже на очень больших участках длины кабеля. В мультиплексированном сенсорном экране активный сигнал объединительной панели устраняет емкостную связь между различными пересекающимися элементами.
Результаты этих наблюдений и экспериментов используются в текущем раскрытии.
На фиг.3 показано, как управляемые элементы можно использовать, как маску для обеспечения того, что части массива из линейных чувствительных элементов будут выполнять сенсорное определение в непосредственной близости к пальцу и будут предотвращать сенсорное определение других частей.
Чувствительные элементы показаны на фиг.3 со ссылкой на номер 302 ссылочной позиции, и управляемые элементы схематично показаны под номером 304 ссылочной позиции. Следует понимать, что чувствительные элементы 302 и управляемые элементы 304 представлены по отдельности с левой стороны на фиг.3 для простоты иллюстрации и что они расположены один над другим при использовании, как показано с правой стороны на фиг.3.
Каждый из чувствительных элементов 302 продолжается в вертикальном направлении, и его можно использовать для идентификации ввода пользователя в горизонтальном направлении. Управляемые элементы 304 представлены схематично как два блока 304а, 304b, один поверх другого, и с зазором 304 с между двумя блоками 304а, 304b. Эти два блока 304а, 304b представляют управляемые элементы, которые заземляют, и зазор 304с представляет незаземленный управляемый элемент. Управляемые элементы 304 на фиг.3 можно рассматривать как предоставляющие широкую маску, поскольку только один из управляемых элементов является незаземленным одновременно. Следует понимать, что широкая маска также может быть обеспечена более чем одним управляемым элементом, являющимися незаземленным одновременно, например 2, 3 или 4 управляемых элемента могут быть не заземлены одновременно и все еще могут обеспечивать предоставление широкой маски. В некоторых примерах, включение любого количества управляемых элементов, которое меньше, чем половина общего количества управляемых элементов, можно рассматривать, как предоставление широкой маски.
Как показано под номером 306 ссылочной позиции, два блока 304а, 304b заземленных управляемых элементов расположены между пользователем и чувствительными элементами таким образом, что они прикладывают маску к чувствительным элементам. Маска ограничивает чувствительные элементы таким образом, что они только идентифицируют ввод пользователя в местоположениях 310, которые соответствуют незаземленному управляемому элементу, которое показано, как зазор 304с в маске.
В других примерах, включая в себя примеры емкостного сенсорного определения прикосновения, заземленные управляемые элементы, которые формируют маску, могут быть расположены позади чувствительных элементов, то есть чувствительные элементы могут быть расположены между управляемыми элементами и пользователем.
Использование управляемых элементов, таким образом, можно рассматривать как предоставление маски с окном. Управляемый элемент, который является заземленным, может изменяться с течением времени таким образом, что окно перемещается вверх или вниз по чувствительным элементам. На фиг.3а-3d показано, как окно можно перемещать вверх по чувствительным элементам с течением времени.
На фиг.3 показано, как возможно заменить решение предшествующего уровня техники, показанное на фиг.1а, простой маской, которая обеспечивает возможность сенсорного определения для восьми вертикальных чувствительных элементов множества пальцев во множестве разных положений вдоль всех восьми чувствительных элементов.
На фиг.4 показано, как узкая маска может использоваться для десенсибилизации выбранных частей кнопочной панели/сенсорного экрана. Фиг.4 аналогична фиг.3 и здесь предусмотрены аналогичные свойства, обозначенные номерами ссылочных позиций в 400 последовательности. На фиг.4 показано, как только один из управляемых (у) элементов 404 может быть заземлен, при этом все другие управляемые (у) элементы 404 могут быть не заземлены.
Управляемые элементы могут быть не заземлены путем соединения их с активной объединительной панелью и могут быть заземлены путем соединения их с фиксированным универсальным потенциалом, как более подробно описано ниже.
С помощью маски, показанной на фиг.4, десенсибилизируют только часть чувствительных (х) элементов 402, которые находятся непосредственно перед (или позади) заземленного управляемого (у) элемента. Большая часть чувствительных элементов 404 остается полностью чувствительной для прикосновения.
Этот способ маскирования можно использовать предпочтительно для устранения неоднозначности при считывании результатов простого мультиплексированного сканирования, такого как выполняют в предшествующем уровне техники по фиг.1а. Например, как продолжающиеся горизонтально, так и продолжающиеся вертикально элементы можно использовать в качестве чувствительных элементов, в соответствии с известным мультиплексированным массивом, как представлено на фиг.1а, до тех пор, пока не будет определено, что один или больше вводов пользователя присутствуют одновременно. Когда определяют больше, чем один ввод пользователя, тогда чувствительный элемент, который идентифицирует ввод пользователя, можно использовать как управляемый элемент и его можно заземлить, для того чтобы предоставить информацию, которую можно использовать для различения/удаления неоднозначности между множеством вводов пользователя.
Следует понимать, что узкая маска также может быть предусмотрена с использованием больше чем одного управляемого элемента, которые заземляют одновременно, например 2, 3 или 4 управляемых элемента могут быть заземлены одновременно и все еще могут обеспечивать узкую маску. В некоторых примерах заземление любого количества управляемых элементов, количество которых меньше, чем половина общего количества управляемых элементов, можно рассматривать, как обеспечение узкой маски.
На фиг.5 иллюстрируется четыре разных способа применения маски, которая обеспечивается путем включения и выключения управляемых элементов. Следует понимать, что присутствуют вертикально продолжающиеся чувствительные элементы и горизонтально продолжающиеся управляемые элементы, аналогично фиг.3 и 4.
На фиг.5 заземляемые управляемые элементы показаны черными и включенные управляемые элементы показаны белыми. Время показано, как продолжающееся слева вправо таким образом, что маска немедленно следует после маски, находящейся справа. В пятом примере (5/1), однако, пять из восьми масок начинаются снова с левой стороны на странице. Знаком "х" 502, показанным на фиг.5, представлен ввод пользователя, который требуется детектировать.
На фиг.5 (2) показаны маски, используемые в нескольких крупных блоках, причем каждый блок охватывает разную часть экрана. Вместо заземления одного управляемого (у) элемента последовательно по времени, возможно сэкономить время путем заземления блоками, и определения положения ввода/прикосновения пользователя путем последовательной аппроксимации, или поиска с "делением пополам". Верхняя половина может быть заземлена и нижняя половина может быть не заземлена, для определения, находится ли палец в верхней половине или в нижней половине. В зависимости от результатов, затем та половина, где был детектирован палец, может быть снова разделена пополам и т.д., до тех пор, пока точное положение пальца не будет найдено. После каждого этапа количество заземленных управляемых элементов может быть разделено наполовину или уменьшено до тех пор, пока местоположение ввода пользователя не будет определено. Если палец попадает на границу между двумя блоками, тогда программное обеспечение может выбрать два соседних управляющих элемента на этой границе для обеспечения возможности определения точного положения пальца.
Аналогичная технология также может использоваться для х чувствительных элементов. Для детектирования прикосновения к экрану одним пальцем, несколько х элементов могут выполнить сенсорное определение во взаимно соединенном блоке х элементов. Одна сторона экрана может выполнять сенсорное определение и затем другая сторона. Если детектируют палец в одной половине, тогда в этой половине может быть выполнено сенсорное определение во все меньших и меньших группах элементов до тех пор, пока не будет найдено точное положение пальца.
На фиг.5 (3) показан способ маскирования, где маска закрывает только каждую одну треть экрана. Как можно понять из следующего описания, в некоторых примерах это может значительно уменьшить соединение с землей, требуемое для десенсибилизации элементов, по сравнению с другими способами маскирования, такими как представлено на фиг.5 (1) или 5 (2).
Маскирование с последовательной аппроксимацией также уменьшает время, необходимое для поиска положения пальца, по сравнению с последовательным сканированием. Для маски из 32 этапов (то есть, 32 независимо управляемых элементов) требуются только 5 или 6 итераций при использовании маскирования с последовательной аппроксимацией, для определения местоположения пальца. Это можно противопоставить тридцати двум итерациям, которые потребовались бы при последовательном маскировании.
Маскирование с последовательной аппроксимацией приближения может потребовать сгенерировать опорную таблицу "без прикосновения", которая представляет х значений датчика, которые будут определены в каждом из состояний маски с последовательной аппроксимацией, когда пальцы не прикасаются к экрану.
На фиг.5 (3) показан пример трех положений маски. Это потребует опорного значения "без прикосновения" для всех х входов для 1) отсутствия маски, 2) верхней маски, 3) средней маски и 4) нижней маски. При этом может потребоваться точно идентифицировать изменение от опорного значения, когда происходит прикосновение.
На фиг.6 показан вид сверху пригодной для маскирования кнопочной панели/сенсорного экрана 600, используемых для детектирования множества пальцев в соответствии с вариантом осуществления изобретения. На фиг.7 показан вид в поперечном сечении сенсорного экрана 600 по фиг.6 вдоль линии а-b. На фиг.15а показаны результаты простого сканирования х/у на этой кнопочной панели/сенсорном экране и на фиг.15b показаны результаты сканирования широкой маски той же кнопочной панели/сенсорного экрана.
Сенсорный экран на фиг.6 включает в себя массив из восьми датчиков ввода на восемь управляемых элементов. Управляемые элементы можно использовать для получения маски, примеры которой описаны выше. Управляемые элементы также можно использовать, как сенсорные входы.
Сторона экрана, находящаяся дальше всего от пользователя (как лучше всего можно видеть на фиг.7), выполнена как электропроводный слой, состоящий из восьми горизонтальных зон (y1-у8), изолированных друг от друга. Эти зоны или управляемые элементы формируют маску. Управляемый элемент у8 показан под номером 610 ссылочной позиции на фиг.6 и 7. Под управлением электронной схемы 614, которую можно назвать контроллером, управляемые элементы (y1-у8) будут либо соединены с землей или соединены с активным сигналом объединительной панели, когда они действуют как маска, или соединены с чувствительной схемой, когда они действуют как датчик прикосновения.
Перед слоем управляемых элементов (y1-у8), но в очень близком положении и изолировано от них, находятся восемь вертикальных проводников (x1-х8), которые соединены с электронной схемой 614, которая делает их чувствительными к прикосновению. Эти элементы (x1-х8) не занимают всю площадь экрана, а только часть ее и их можно назвать чувствительными элементами. Чувствительный элемент х4 показан в положении под номером 612 ссылочной позиции на фиг.6 и 7.
Перед слоем чувствительных элементов (x1-х8) находится лист изолирующего материала, такого как стекло или пластик 608, который экранирует палец пользователя от чувствительных элементов (x1-х8).
Если все находящиеся на заднем плане элементы (y1-у8) соединить с землей, тогда очень большее соединение с землей сделает восемь элементов (x1-х8), чувствительных к прикосновению, находящихся перед ними, очень нечувствительными и неспособными детектировать прикосновения или присутствие в непосредственной близости к пальцу.
Если, однако, один из у элементов не будет соединен с землей, но будет соединен с активным сигналом объединительной панели, тогда части элементов х, которые находятся непосредственно перед этим включенным элементом у, будут иметь возможность детектировать прикосновение или присутствие в непосредственной близости к пальцу. Все восемь х элементов могут быть выполнены с возможностью детектировать палец, поэтому, используя только один у незаземленный элемент (и поэтому, включенный), становится возможным детектировать вплоть до восьми пальцев по ширине у элемента. Электронная схема 614 заземляет каждый у элемент по очереди до тех пор, пока все восемь у элементов не будут индивидуально заземлены, что обеспечивает возможность детектирования вплоть до 64 пальцев. После каждого полного сканирования всех у элементов затем электронная схема 614 может начать новое сканирование и продолжать сканирование до бесконечности.
На фиг.6 показано возможное положение десяти пальцев (F0-F9) на экране. Палец F2 показан в положении под номером 602 ссылочной позиции, палец F5 показан в положении под номером 604 ссылочной позиции и палец F4 под номером 606 ссылочной позиции. Предполагая, что сканирование начинается с у1, который соединен с активной объединительной панелью и у2-у7 заземленными, тогда датчики x1-х8 будут детектировать палец, F4 606, в позиции х4 и часть пальца F9 между х6 и х7.
Если у1 будет затем соединен с землей и у2 соединен с активной объединительной панелью (АВР) и все х вводов сканируют для определения пальца, тогда другая часть пальца F9 будет детектирована между х6 и х7. Результаты этих двух сканирований показывают, что палец F9 находится между х6 и х7 и между у1 и у2.
Когда у2 заземлен и у3 соединен с АВР, палец F0 будет детектирован по х2, палец F5 604 будет детектирован между х4 и х5 и палец F6 будет детектирован элементом х7 датчика.
Если у3 будет заземлен и у4 соединен с АВР, тогда пальцы не будут детектированы ни одним из восьми х чувствительных элементов, что показывает, что отсутствуют пальцы, прикасающиеся в этом ряду.
Когда у4 заземлен и у5 соединен с АВР, тогда палец F1 будет детектирован в х2 и палец F7 будет детектирован между х6 и х7.
Ни один из пальцев не будут детектирован, когда у6 представляет единственный у элемент, соединенный с АВР.
Палец F8 будет детектирован между x1 и х2 и палец F3 будет детектирован между х5 и х6, когда у7 соединен с активной объединительной панелью.
Палец F2 602 будет детектирован между х4 и х5, когда элемент у 8 соединен с АВР.
Таким образом, десять пальцев или больше могут быть детектированы и их положение может быть точно указано, используя только восемь чувствительных элементов и восемь заземляемых/управляемых элементов (см. фиг.15b). Когда пальцы движутся, их можно отслеживать путем последовательного сканирования восьми х и восьми у элементов.
Сравнение фиг.15а с фиг.15b показывает значительное количество дополнительной информации, которая может быть получена с использованием широкой маски, показанной на фиг.3. На фиг.15а, которая представляет простое сканирование х/у, обеспечивает обозначение того, что много пальцев прикоснулось к экрану, но не может точно определить, какие пальцы находятся в каких местах, или точно, где они находятся. В отличие от этого, маскирование по фиг.15b представляет, какие пальцы являются какими и точно показывает, где эти пальцы находятся.
Если элементы х не занимают всю ширину экрана, но оставляют части у элементов "видимыми" через емкостные связи спереди экрана, тогда эти у элементов также могут удвоить количество вводом сенсорного определения. Это обеспечивает действие экрана в качестве простой мультиплексированной кнопочной панели/сенсорного экрана х/у, как на фиг.1а, и в качестве маскированной экрана с множеством прикосновений.
Экран в некоторых вариантах осуществления может быть сканирован большую часть времени как простой сканер х/у, такой как мультиплексированный массив, показанный на фиг.1а, и способ маскирования можно использовать просто для устранения неоднозначности в результатах сканирования х/у, если и когда это требуется. Если его использовать таким образом, маскирование может быть воплощено более разумно и может обеспечивать более быстрое детектирование, чем если бы сенсорный экран использовали просто в режиме маски. Например, поскольку пальцы не были детектированы, когда у4 и у6 соединили с АВР в примере, показанном выше, как показано по результатам сканирования у на фиг.17а, тогда эти два элемента могут быть исключены из любой сканируемой маски, что используется исключительно для устранения неоднозначности между простым сканированием х/у. Кроме того, любые данные, которые уже доступны вокруг положений пальца из результата сканирования х/у, можно использовать для минимизации/уменьшения количества информации, требуемой для сканирования с маской. Единственная информация, которая может потребоваться для сканирования с маской, предназначена для устранения неоднозначности данных сканирования х/у. Сканирование с маской может быть выполнено быстрее, если не требуется обеспечить точную информацию местонахождения.
В некоторых приложениях процент времени, в течение которого к сенсорному экрану прикасаются, может быть очень небольшим. В таких приложениях может быть возможным соединить все элементы у с активным сигналом объединительной панели и просто сканировать только чувствительные входы х большую часть времени. Когда детектируют палец, сенсорный экран можно переключить в режим сканирования х/у или в режим с маской для множества прикосновений. Такое изменение может осуществляться автоматически под управлением электронной схемы 314 или с использованием любого другого контроллера.
Открытые концы чувствительных элементов или все кромки кнопочной панели/сенсорного экрана могут быть экранированы так, что они не будут выполнять сенсорное определение пальцев из-за постоянного заземления электропроводного слоя, или, если экранировать от прикосновения пользователя, они могут быть соединены с активным сигналом объединительной панели.
На фиг.7 показано, что в данном варианте осуществления элементы у являются прикрепленными к элементам х с помощью тонкого клеящего, изолирующего слоя 616. Передняя сторона элементов х закреплена на толстом листе стекла 608 с помощью другого тонкого клеящего слоя 618 в данном примере, хотя в других примерах можно использовать статическое или любое другое средство.
Для того чтобы заземление маски работало эффективно, емкостное соединение между заземляющей маскирующей пластиной (у1-у8) и элементом (х1-х8), чувствительным к прикосновению, должно быть намного больше, чем емкостная связь между пальцем и чувствительным к прикосновению элементом (х1-х8). Для конденсатора с параллельными пластинами, емкость непосредственно связана с площадью поверхности двух пластин и обратно пропорционально расстоянию, на котором расположены пластины между собой:
C=aS/D,
где а представляет собой константу, S представляет собой площадь пластин, D представляет собой расстояние между пластинами.
Расстояние между заземленной маской (у1-у8) и чувствительным элементом (х1-х8) должно быть намного меньшим, чем расстояние между пальцем (таким, как палец F2 602 на фиг.7) и чувствительным элементом (х1-х8). Площадь экспонирования для заземленной маски (у1-у8) также может быть большой, при сравнении с площадью экспонирования для пальца, для обеспечения эффективного маскирования.
На фиг.7 расстояние между элементами у и чувствительными элементами х (с) 620 очень мало по сравнению с расстоянием между пальцами и чувствительными элементами х (d) 622. Изолирующий слой 616 между элементами х и у может составлять около 0,1 мм в толщину, тогда как толщина стекла 608 может составлять от 2 мм до 10 мм или больше.
Схема псевдоцепи показана фиг.8, и иллюстрирует емкость с1 802 между управляемыми элементами у и чувствительными элементами х и также емкость с2 804 между чувствительными элементами х и пальцем. Значение D для конденсатора с1 802 на фиг.8 приблизительно в 20-100 раз меньше, чем значение D для конденсатора с2 804, на основе расстояния между "пластинами" конденсаторов. Элемент у также представляет большую площадь пластины для элемента х, чем палец, увеличивая, таким образом, дополнительно разность по величине между конденсатором с1 802 и с2 804. Если элемент у имеет в четыре раза больше площадь поверхности для чувствительного элемента х, чем у пальца, тогда с1 будет приблизительно в 80-400 раз больше, чем с2. Поэтому, когда элемент у заземлен, он создает очень существенный эффект на способность наложения элемента х (через с1 802), для сенсорного определения относительно очень малого эффекта заземления пальца через с2 804. Однако, когда элемент у соединен с активной объединительной панелью, конденсатор с1 802 эффективно исчезает, так что эффект заземления пальца, который может быть очень малым, не оказывает существенного влияния на чувствительный элемент х.
Неотъемлемым свойством активного сигнала объединительной панели является то, что он устраняет емкость между чувствительным элементом х и любым проводником, соединенным с активной объединительной панелью.
Активный сигнал объединительной панели может быть выведен из чувствительного элемента х путем использования высокоскоростного не инвертирующего буфера с единичным усилением (см. фиг.9, которая более подробно описана ниже). Активный сигнал объединительной панели имеет как можно более близкую, а точнее, ту же форму колебаний и фазу, что и сигнал сенсорного определения, поэтому любой проводник с активным сигналом объединительной панели в нем будет иметь очень малую или будет не иметь емкостную связь с любым проводником с оригинальным сигналом сенсорного определения в нем, независимо от того, насколько близко или как далеко они могут находиться друг от друга.
В схемах на фиг.6 и 7 единственный элемент у, который показан соединенным с АВР, представляет собой у3. Площади датчика 600 прикосновения, которые являются чувствительными к прикосновению, показаны с диагональной штриховкой 624.
На фиг.7 пальцы F2 602 и F4 606 прикасаются к стеклу 608 в положениях, в которых сенсорное определение элементами у, которые заземлены позади датчика х4, являются блокированными. В этих заземленных элементах у поддерживается напряжение земли или 0 вольт. Палец F5 604, однако, прикасается к стеклу 608 в положении, где элемент х4 датчика является чувствительным к прикосновению, поскольку он находится перед элементом у, закрепленным на активной объединительной панели. Палец F5, поэтому, может быть определен с помощью чувствительного элемента х4.
По мере того как схема 614 сканирования элемента у сканирует все восемь элементов у, разные области экрана становятся чувствительными к присутствию пальца на другой стороне стекла 608. Когда у8 соединен с активной объединительной панелью, тогда будет определен палец F2 602, и когда у1 соединен с активной объединительной панелью, тогда будет определен палец F4 606.
На фиг.9 показана упрощенная принципиальная схема простого детектора 900 прикосновения и схема генерирования активной объединительной панели в соответствии с вариантом осуществления изобретения. Детектор прикосновения имеет восемь чувствительных входов 902 х, восемь управляемых выходов 904 у для управляемых элементов и, в случае необходимости, восемь у чувствительных входов 906. Как описано ниже, восемь у чувствительных входов 906 могут быть или могут не быть теми же, что и восемь управляемых выходов у 904.
В примере, показанном на фиг.9, вырабатывают активный сигнал 908 объединительной панели из входного сигнала 910 сенсорного определения, выведенного из х чувствительных входов 902 (и, в случае необходимости, из у чувствительных входов 906), в чувствительный к прикосновению резистивно/емкостной генератор (RC). В схеме такого типа изменение емкости приводит к изменению частоты сигнала 910 чувствительного входа. Другие способы сенсорного определения также можно использовать, множество из которых не приводят к изменению частоты с изменением емкости. Другие способы определения прикосновения могут влиять на амплитуду формы колебаний, без изменения частоты, и активный сигнал объединительной панели с этой целью сам по себе мог бы иметь оригинальную форму колебаний.
Если больше чем один элемент 902 х требуется чувствительно определить точно в одно и то же время, тогда будет предпочтительным использовать способ сенсорного определения, который не связан с изменением частоты. Если все разные чувствительные элементы одновременно работают с разными частотами, невозможно сформировать общий активный сигнал объединительной панели. Если, однако, все чувствительные вводы работают на одной частоте, тогда их можно возбуждать от общего сигнала, который также можно было бы использовать как общий сигнал активной объединительной панели. Это может, например, предполагать использование фиксированной частоты, которая изменяется по амплитуде, фазе или приводит к изменению зарядного тока, в ответ на изменение емкости. Небольшая величина пульсаций, частоты, может быть введена для уменьшения электромагнитного излучения.
На фиг.9 также показано, что управляемые элементы 904 у, которые обычно могли бы быть соединены с землей 912 или с сигналом 908 активной объединительной панели, могут быть заменены, в случае необходимости, или регулярно, на альтернативный банк чувствительных элементов 906. Это может обеспечить возможность переключения экрана со стандартного мультиплексированного сенсорного экрана х/у на маскированный экран с множеством прикосновений. В других вариантах осуществления возбуждаемые элементы у могут самостоятельно удваиваться как чувствительные элементы. В этом случае, такой дополнительный банк чувствительных элементов может не потребоваться, поскольку простой набор из восьми элементов у может использоваться как в качестве чувствительных, так и в качестве управляемых элементов. Если используются дополнительный чувствительные элементы у, тогда, в то время как они активно используются для определения, все управляемые элементы у могут быть соединены с сигналом активной объединительной панели так, что они не будут влиять на чувствительность чувствительных элементов у.
На фиг.10 показана маскируемая кнопочная панель/сенсорный экран 1000 с восемью управляемыми элементами 1002 у, восемью проводными чувствительными элементами 1004 у и восемью проводными чувствительными элементами 1006 х. Каждый из элементов 1002, 1004, 1006 соединен с разъемом 1008, который может быть соединен со схемой, такой как показана на фиг.9.
В этом примере проводные чувствительные элементы 1004, 1006 изготовлены из тонкого провода, покрытого изоляционным материалом. Восемь горизонтальных, управляемых элементов 1002 у изготовлены из материала пластинчатого типа, такого как ITO или АТО, медная фольга, электропроводные печатные чернила, или перфорированный проводник или сетка, и расположены позади и изолированы от проводов 1004, 1006.
Сенсорный экран 1000 может использоваться в стандартном мультиплексированном режиме х/у, и в этом режиме горизонтальные пластины 1002 все соединены с активным сигналом объединительной панели, так что они не мешают функционированию чувствительных проводов 1004, 1006. Когда их используют в режиме маски с множеством прикосновений, семь из восьми горизонтальных пластинчатых элементов 1002 соединены с землей, и оставшиеся горизонтальные пластинчатые элементы 1002 соединены с активным сигналом объединительной панели или могут быть оставлены с плавающим потенциалом.
На фиг.11 показан одиночный элемент 1102, чувствительный к прикосновению, и электронно-переключаемая маска из восьми элементов, состоящая из восьми управляемых элементов 1104. Схема 1116 датчика прикосновения соединена с чувствительным элементом 1102.
На фиг.11 показано, как становится возможным обеспечить функционирование одиночного чувствительного к прикосновению элемента 1102, как последовательность элементов, чувствительных к прикосновению, путем маскирования большей части чувствительного к прикосновению элемента 1102 от прикосновения. Часть чувствительного к прикосновению элемента 1102 маскируют, используя сильное емкостное заземление, и, поэтому, они не чувствительны к прикосновению. Один из управляемых элементов 1106, соединенный с активной объединительной панелью или оставленный с плавающим потенциалом, оставляет малое окно в маске 1108, через которое может быть детектировано прикосновение.
Заземление одного или больше управляемых элементов 1104 на фиг.11 выполняется через электронный переключатель, такой как мультиплексор 1110, который соединяет каждый из управляемых элементов 1104, либо с напряжением ноль вольт 1114, или с сигналом 1112 АВР. В примере по фиг.11, третий управляемый элемент 1106 снизу соединен с АВР 1112 с помощью мультиплексора 1110 таким образом, что этот управляемый элемент 1106 соединен с активной объединительной панелью. Все другие управляемые элементы соединены с нулем вольт 1114 с помощью мультиплексора, для десенсибилизации оставшегося из чувствительного элемента 1102. Таким образом, область чувствительного элемента 1102, который пересекает незаземленный управляемый элемент 1106, является чувствительной к прикосновению. Это показано на фиг.11 под номером 1108 ссылки. Все области, которые пересекают заземленные управляемые элементы, не являются чувствительными к прикосновению.
На фиг.12 и 13 показаны одиночные чувствительные к прикосновению элементы 1202, 1302, которые аналогичны показным на фиг.11.
Управляемые элементы 1204 по фиг.12 могут быть соединены с АВР 1212 с помощью мультиплексора 1210. Если управляемый элемент 1204 не соединен с АВР 1212, тогда его напряжение падает до напряжения земли, из-за резистора 1214 утечки. Резистор утечки соединен с каждым из управляемых элементов 1204 и землей или нулем вольт.
Управляемые элементы 1304 по фиг.13 могут быть соединены с АВР 1312 с помощью мультиплексора 1310. Если управляемый элемент 1304 не соединен с АВР 1212, тогда его оставляют в состоянии "плавающего потенциала" таким образом, что он сильно соединен через емкостную связь к заземленной электропроводной пластиной 1318, расположенной позади маски переключателя управляемых элементов 1304.
На фиг.14а и 14b показан одиночный, механически или электронно-управляемый переключатель маскирования прикосновения, в соответствии с вариантом осуществления изобретения. На фиг.14а показан маскирующий прикосновения переключатель с выключенным сенсорным определением прикосновения, и на фиг.14b показан маскирующий переключатель прикосновения с включенным сенсорным определением прикосновения.
На фиг.14 показано, как для сенсорного определения прикосновения из электропроводной пластины, сенсорная пластина/элемент 1402 может быть включена и выключена, используя операцию простого механического переключателя 1404. Первый вывод переключателя 1404 соединен с другой электропроводной пластиной, управляемой пластиной/элементом 1406. Управляемая пластина 1406 расположена позади сенсорной пластины 1402 и находится в очень близком положении к, но изолирована от сенсорной пластины 1402. Первый вывод переключателя 1404 может быть соединен либо с сигналом 1404 АВР, или с заземлением 1408, в зависимости от состояния переключателя 1404.
Когда управляемая пластина 1406, находящаяся позади, соединена с землей 1408 с помощью переключателя 1404, тогда возникает очень сильная связь сенсорного элемента 1402 с землей. Такой эффект заземления существенно уменьшает возможность сенсорной пластины 1402 сенсорно определять очень малый дополнительный заземляющий эффект находящегося рядом с ней пальца через непроводящую переднюю панель 1410. Однако когда задняя управляемая пластина 1406 соединена с активным сигналом 1404 объединительной панели, емкостная связь сенсорной пластины 1402 с землей устраняется, и сенсорная пластина 1402 теперь может выполнять сенсорное определение очень малого заземляющего эффекта находящегося рядом с ней пальца.
В других вариантах осуществления электронный переключатель можно использовать вместо механического переключателя 1404, и это может обеспечить возможность электронного включения и выключения описанного выше переключателя, чувствительного к прикосновению (см. фиг.11, 12 и 13). Электронный переключатель может работать быстрее, чем механический переключатель, что, в свою очередь, может привести к получению более чувствительного сенсорного переключателя с уменьшенной вероятностью пропуска ввода пользователя.
На фиг.14 также показан необязательный заземленный провод 1420, который предусмотрен рядом с проводом/кабелем 1424, который соединяет сенсорный элемент 1402 с сенсорной цепью 1422. Таким образом, необязательный заземленный провод 1422 может уменьшить возможность того, что любое взаимодействие пользователя (или другого лица) с проводом/кабелем 1424 будет непреднамеренно идентифицировано как ввод на чувствительных элементах. Заземленный провод, продолжающийся очень близко вдоль чувствительного провода, будет десенсибилизировать эту длину чувствительного провода к прикосновению в тех местах, где оба провода находятся в непосредственной близости друг к другу.
На фиг.15а и 15b иллюстрируются данные, возвращаемые от датчика прикосновения, который принимает ввод пользователя от этих десяти пальцев F0-F9 показанных на фиг.6. На фиг.15а показаны данные, возвращаемые из датчика прикосновения, когда его используют в мультиплексированном режиме датчика прикосновения х/у. На фиг.15b показаны данные, возвращаемые из того же датчика прикосновения, но используемого в режиме широкой маски.
Значения х и у на фиг.15а показывают, что все 10 пальцев были детектированы, но что их значения были наложены друг на друга, что затрудняет или делает невозможным определить сколько пальцев находится там или где точно они расположены.
В отличие от этого, на фиг.15b показаны измеренные данные датчика х для каждого из управляемых элементов у по отдельности, по мере того, как каждый из элементов у был помещен в окно (не заземлен) поочередно. Восемь результатов маскированного сканирования, показанных на фиг.15b, можно использовать для определения, что присутствуют десять пальцев, и положения этих пальцев можно легко рассчитать, используя простой алгоритм, такой как алгоритм расчета центра тяжести.
На фиг.16 показано, как узкая маска может использоваться для устранения неоднозначности для двух пальцев в соответствии с вариантом осуществления изобретения. На фиг.16 показан простой мультиплексированный массив 1600 по фиг.1а и полученный в результате сканирования 1602 результатов х и у. Как описано выше, невозможно определить, которой из двух пиков 1604, 1606 х ассоциирован с каким из двух пиков 1608, 1610 у, используя стандартный сенсорного определения х/у. Однако, в результате заземления одного из элементов у, связанных с одним из у пиков, становится возможным видеть, какой пик х ассоциирован с каким пиком у. Например, на фиг.16 показано, что х7 существенно уменьшается при заземлении у6. Это показано графически под номером 1612 ссылочной позиции и может обеспечить возможность определения, что палец находится в положении х7/у6. По умолчанию и используя процесс исключения, таким образом, другой палец находится в координате х5/у3. Этот способ маскирования, поэтому, обеспечил возможность устранения неоднозначности результатов простого мультиплексированного сканирования 1602 х/у, когда два пальца прикасаются к экрану 1600.
На фиг.17 показано, как можно использовать нацеленную узкую маску в соответствии с вариантом осуществления изобретения, для быстрого и точного определения, как два пальца перемещаются, когда они оба начинают движение на одном и том же элементе 1708 маскирования, даже может использоваться контроллер с малой мощностью (см. раздел - Режимы работы с процессором малой мощности). Когда два пальца были детектированы, как находящиеся на одном и том же горизонтальном сенсорном элементе 1708 у3, как на фиг.17, становится невозможным отличить один палец от другого, используя стандартное детектирование кромки х/у. Хотя на фиг.17b показано, что один из пальцев переместился вверх к направлению у4, как показано путем изменения значений у датчика, отсутствуют какие-либо показания в значениях датчика х, который из пальцев переместился фигурой вверх. Если, однако, элемент у4 преобразовать в заземленный управляющий элемент, тогда, по мере того как палец движется вверх по экрану, ассоциированные фигурой результаты считывания датчика х для этого пальца уменьшаются. При сравнении фиг.17а и 17b можно видеть, что палец F1 1710 переместился вверх по экрану.
Вместо последовательно многократного маскирования всех восьми элементов, по одному от у1 до у8, только элементы у2 и у4 могли быть избирательно поочередно заземлены, и в случае необходимости, очень быстро можно было бы достичь результатов с очень быстрой скоростью отклика на любое движение.
Если один палец 1710 движется вверх по экрану 1700, то он приблизится к следующему элементу датчика у, который в данном примере представляет собой у4. Если у4 заземлен, тогда один из пиков х уменьшится по амплитуде, при этом его уменьшение будет синхронизировано со временем, когда у4 заземляют и у2 отключают от земли. Пик х уменьшается, поэтому палец движется вверх по экрану. На фиг.17, х7 представляет собой пик х, который уменьшается, поэтому, палец F1 1710 движется вверх по экрану. Палец F0 представляет собой единственный оставшийся палец, и поэтому палец F0 представляет собой палец, который не движется вверх по экрану. Если бы палец F1 1710 двигался вниз экрану, вместо движения вверх, тогда те же наблюдения можно было бы сделать, но на этот раз уменьшение было бы синхронным со временем, когда у2 был заземлен и у4 был отключен от земли, показывая, таким образом, что палец F1 1710 двигался вниз по экрану.
Концентрируя маскирование вокруг двух соседних маскирующих элементов, вместо использования непрерывной последовательности маскирования через весь экран по восьми маскирующим элементам, время отклика может быть увеличено с коэффициентом четыре (в данном примере). При использовании 32 элементов время отклика увеличилось бы с коэффициентом 16.
На фиг.18 показан простой экран 1800 с тонкими проводами, которые проложены для получения определенной емкостной перекрестной связи между проводами 1802 х и проводами 1804 у. Провода 1802 х и провода 1804 у представляют собой примеры элементов для датчика прикосновения.
На фиг.18 элементы изготовлены из тонкого провода, хотя в других примерах в качестве элементов могут использоваться материалы типа непрерывной пластины, такие как IТО и печатные электропроводные чернила. Недостаток использования провода может представлять собой уменьшение емкостной связи между чувствительными элементами и маскирующими элементами. Элементы, имеющие большие плоские покрытые металлом области, которые пересекают друг друга, могут привести в большой величине емкостной связи из-за большой площади перекрытия между емкостными пластинами. В отличие от этого, элементы в виде проводов имеют очень малые площади поперечного сечения, поэтому образуют очень небольшую емкостную связь. Этот факт может быть предпочтительным для стандартного сенсорного определения, но может представлять собой недостаток для некоторых способов маскированного сенсорного определения, описанных здесь. Присутствует, однако, определенная емкостная связь при использовании провода, и она может быть достаточной для обеспечения способов маскированного сенсорного определения в некоторых вариантах осуществления. Заземление провода или проводов в измерении 1804 у может ослабить чувствительность провода или проводов в измерении 1802 х. Разности значений, определяемых в измерении 1802 х, с заземленными и незаземленными проводами в измерении 1804 у, достаточно велики, чтобы их можно было использовать для устранения неоднозначности результатов мультиплексированного сканирования х/у, когда более чем один палец помещен на экране одновременно.
Дополнительное разрешение может быть получено путем поочередного сканирования экрана с элементами х, используемыми в качестве чувствительных элементов, в то время как элементы у представляют собой управляющие элементы, после чего выполняется сканирование с элементами у в качестве чувствительных элементов, в то время как элементы х представляют собой управляющие элементы. Комбинируя результаты этих двух сканирований вместе, может быть получена достаточная дополнительная информация для обеспечения возможности использования элементов в виде проводов более надежно в режиме полного маскирования. Результат первого сканирования может идентифицировать "исходные" места положения одного или больше вводов пользователь, и результат второго сканирования может определить "вторичное" местоположение одного или больше вводов пользователей. Композитное/заключительное местоположение одного или больше вводов пользователя может быть затем определено в соответствии с первичным местоположением и вторичным местоположением.
При использовании тонкого провода в качестве элемента, чувствительного к прикосновению, и/или в качестве управляющего элемента перекрестные связи могут не быть такими же сильными, как и в случае, когда используется материал типа пластины. Поэтому, для того чтобы улучшить возможность использования технологии маскирования при применении провода, варианты осуществления изобретения включают в себя следующие функции:
1) выполняют маскированное сканирование при использовании проводов х в качестве чувствительных элементов, в то время как провода у используются в качестве управляющих элементов, затем
2) выполняют сканирование с маскированием, когда провода у используются в качестве чувствительных элементов, в то время как провода х используются в качестве управляющих элементов, затем
3) комбинируют результаты предыдущих двух сканирований вместе для получения композитных результатов сканирования с более высоким разрешением.
Эта функция не ограничена элементами проводов и также может использоваться с элементами других типов, если только как элементы х, так и элементы у выполнены с возможностью использования их в качестве чувствительных и управляющих элементов.
На фиг.18 показаны провода 1802, 1804, которые выполнены зигзагообразными, то есть они могут следовать по пути, который продолжается вперед и назад, для увеличения величины емкостной связи между проводами на осях 1802, 1804 х и у. При использовании стандарта в мультиплексированном режиме х/у емкостная связь устраняется с помощью соединительных проводов, которые не были сделаны чувствительными в результате подключения к активной объединительной панели. При использовании в маскированном режиме, однако, один или больше проводов в плоскости 1804 у может быть заземлен, и это может привести к получению существенного измеримого эффекта емкостной связи с одним или больше проводами в плоскости 1802х. Это может обеспечить устранение неоднозначности результатов из стандарта системы детектирования х/у, в достаточной степени для определения, который из пальцев является которым, когда два пальца или больше используют на экране одновременно.
На фиг.19 показан экран 1900 с тонким проводом, который проложен для увеличения емкостной связи между проводами, которые продолжаются вдоль оси 1902 х, и проводами, которые продолжаются в направлении оси 1904 у. Компоновка проводов 1902, 1904 на фиг.19 выполнена таким образом, что часть провода 1902 х следует по пути, который является, по существу, параллельным и, по существу, расположен рядом с участком провода 1904 у в области экрана 1900 так, что участки провода 1902 х и провода 1904 у соответствуют друг другу, для формирования чувствительной области. Благодаря размещению областей провода х и провода у, по существу, параллельно и, по существу, рядом друг с другом, может улучшить емкостную связь между проводами.
На фиг.20 показан альтернативный экран 2000 из тонкого провода, который проложен для увеличения емкостной связи между проводами. Экран 2000 обеспечивает возможность уменьшения размером материала экрана, если требуется, без потери функциональности.
На фиг.18, 19 и 20 все вертикальные провода начинаются в нижней части экрана и проложены зигзагообразно вверх по экрану. Если экран будет обрезан и будет выполнен более коротким, тогда оставшиеся провода будут все еще соединены с контроллером. Горизонтальные провода, однако, зигзагообразно проложены по всей длине экрана на фиг.18 и 19. Зигзагообразная укладка в любой конкретной чувствительной зоне вытянута через все чувствительные зоны в этом ряду. Если экран будет обрезан вертикально так, что только левая сторона экрана останется, тогда на показанной схеме две трети провода, идущего к каждому входу, будут обрезаны и изолированы от входа. На фиг.20 провод уложен таким образом, что это предотвращается. Все зигзагообразная укладка, требуемая для каждой чувствительной зоны, будет закончена в пределах этой чувствительной зоны.
На фиг.21 показан сенсорный экран 2100 с маскирующим продолжающимся вертикально (х) управляемым слоем из элементов 2102, которые расположены позади продолжающегося горизонтально (у) чувствительного слоя элементов 2104, которые изготовлены из тонкого провода. В этом примере маскирующий слой расположен вертикально и чувствительный слой расположен горизонтально. Структура проводов чувствительных элементов 2104 в этом варианте осуществления является очень простой и может быть заменена более сложными компоновками, такими, как показаны на фиг.18, 19 и 20.
На фиг.22 показан датчик прикосновения, в котором все горизонтальные элементы у выполнены, насколько это возможно, более широкими, изготовлены из материала в виде пластины, такого как оксид индия и олова (ITO), и всегда используются в качестве управляемых элементов, соединенных либо с землей, или с активной объединительной панелью. Вертикальные элементы х находятся перед элементами у и расположены между пользователем и элементами у. Они также выполнены настолько более широкими, насколько возможно, без промежутков между элементами х, для того, чтобы используя емкостную связь, "видеть" задние элементы у. Элементы х всегда используются, как датчики прикосновения.
Преимущество такой компоновки состоит в том, что структура из ITO является очень простой и обеспечивает очень хорошие оптические и функциональные свойства. ITO занимает практически весь экран с очень небольшим количество изолирующих дорожек и не препятствует обзору. Вся ширина ITO также уменьшает сопротивление дорожек х и у, сводя его к минимуму.
На фиг.23 показана одиночная чувствительная к прикосновению пластина 2300 с двумя слоями маскирования 2302, 2304. На фиг.23 иллюстрируется альтернативная форма чрезмерного маскировки, в которой используется слой из управляемых элементов 2304 х и слой из приведенных управляемых элементов 2302 у, для маскирования большей части экрана. Все, кроме одного из управляемых элементов х, и все, кроме одного из управляемых элементов у, могут быть заземлены, при этом оставшийся элемент х и у соединен с активной объединительной панелью. Это приводит к десенсибилизации большей части пластины 2300, чувствительной к прикосновению, оставляя небольшое пятно чувствительным в месте пересечения элементов х и у, которые были соединены с активной объединительной панелью. Номером 2306 ссылочной позиции показано как чувствительная к сенсорная пластина 2200 и два слоя маскирования 2302, 2304 могут быть наложены друг на друга, для обеспечения чувствительного к прикосновению окна/пятна 2308.
Можно использовать окно 2308 прикосновения с разными размерами и в разных положениях, путем изменения заземления соответствующих управляемых элементов 2302, 2304 или соединения их с активной объединительной панелью. Окно 2308 прикосновения можно использовать для систематического сканирования малого окна по всей поверхности, чувствительной к прикосновению, или можно выбрать специфические области для сенсорного определения.
Для того чтобы чувствительный слой 2300 мог выполнять сенсорное определение пальца через переднюю маску, 2304, в положении, которое соединено с активной объединительной панелью, передняя маска должна иметь зазоры в ней. При этом была бы идеальной сетчатая передняя маска.
Чувствительная пластина 2300 может быть расположена позади, в то время как две маскирующие пластины 2302 и 2304 находятся спереди. При такой компоновке, однако, обе маскирующие пластины не должны иметь зазоров между ними, для того чтобы чувствительная пластина могла выполнять чувствительное определения пальца через них.
На фиг.24 показан маскирующий индуктивный датчик прикосновения в соответствии с вариантом осуществления изобретения. Известно использование таких индуктивных датчиков с металлическим стайлусом, например, для прикосновения к экрану.
На фиг.24а показан контур 2402 индуктивного провода, соединенный со схемой 2404 генератора. Частота генератора зависит от индуктивности проводного контура, L1, 2402 и конденсатора С1. Когда любой металл (такой как стайлус) помещают рядом с проводным контуром L1 2402, его индуктивность повышается и изменяется частота генератора 2404.
Части отклика контура на любой, находящийся поблизости металл, однако, могут быть уменьшены при размещении другого проводного контура рядом с ним, в результате чего десенсибилизируется датчик прикосновения. Если этот второй контур представляет собой замкнутый контур, то его эффективность будет больше, чем если бы он был разомкнутым контуром.
На фиг.24b показано пять разомкнутых контуров 2416, пересекающих индуктивный чувствительный контур L1 2412. Эти разомкнутые контуры 2416 все будут оказываться влияние на частоту чувствительного генератора 2414 и будут уменьшать, в некоторой степени, эффективность сенсорного определения схемы. Однако возможность детектировать находящийся рядом металлический объект будет намного больше, если какой-либо один или больше из контуров 2416 будет замкнутым, формируя, таким образом, кольцо из провода. Разомкнутые контуры 2416 на фиг.24b могут быть замкнуты с помощью функциональных переключателей 2418. Таким образом, область индуктивного чувствительного контура L1 2412, который пересекается с контуром 2416, может быть десенсибилизирована, при включении ассоциированного переключателя 2418 таким образом, что контур 2416 будет замкнут. На фиг.24с показана схема по фиг.24b только с одним десенсибилизированным контуром (контуром 4) и другими десенсибилизированными контурами (контуры 1-3 и 5).
Различие в чувствительности между разомкнутым циклом и замкнутым контуром может обеспечить возможность формирования маски чувствительности.
На фиг.24d показано как маска может быть сформирована для всего банка чувствительных элементов L1-L4 2420, при этом выполняют электронное управление маской. Индуктивные чувствительные элементы L1-L4 2420 могут быть сенсибилизированы по одному одновременно, и для каждого чувствительного элемента 2420 контуры, такие как контур 1 - контур 5, могут быть замкнуты последовательно, по одному одновременно.
При включении питания может быть сформирована таблица считывания частот путем сканирования каждой комбинации входов L1-L4 датчика, при этом каждая комбинация принадлежит индивидуальным замкнутым контурам, контур 1 - контур 5. В результате, может быть получено двадцать считываний в примере по фиг.2-4. Эта таблица может действовать как опорная таблица "без металла".
Если кусок металла, такой как стайлус, поместить рядом с экраном, тогда будет наблюдаться изменение частоты. Если это находится позади контура 4, на фиг.24d, тогда изменение частоты будет меньше, когда контур 4 является замкнутым, чем тогда, когда он разомкнут. Это показывает, что стайлус находится позади контура 4. Если бы он находился позади какого-либо другого контура, тогда не возникало бы различий в измерениях между замкнутым или разомкнутым контуром 4.
Больше, чем один металлический объект, аналогично, также может быть детектирован одновременно. Если какой-либо металлический объект находится позади замкнутого контура, тогда измеренный сигнал будет уменьшен, но если, когда какой-либо конкретный контур замкнут, не происходит уменьшения измеряемого сигнала, тогда металлический объект не находится позади данного конкретного контура.
Вместо маскирования одного контура одновременно, все, кроме одного контура, могут быть маскированы или банки контуров могут быть маскированы одновременно в других вариантах осуществления.
Альтернативные способы маскирования могут использоваться. Вместо маскирования путем замыкания или размыкания контуров можно использовать заземление проводных контуров в отличие от плавающего потенциала в них или можно использовать наложение сигнала на них, который оказывает помеху для сенсорных проводов.
Режимы работы с процессором большой мощности
Если достаточная вычислительная мощность и скорость доступны, маскированный сенсорный экран с множеством прикосновений может работать в нескольких простых режимах.
В результате детектирования множества чувствительных вводов одновременно, и используя процессор, который позволяет работать с частотой 100 МГц, становится возможным сканировать 32 ввода за 32 микросекунды. При использовании маски на 32 направления все 1024 чувствительных зоны могут быть сканированы за 1 мс, что составляет скорость сканирования приблизительно 1000 сканирований в секунду.
Процессоры, выполненные с возможностью обеспечения такой мощности и скорости, уже доступны при малой стоимости в 2010 г., и будущие процессоры будут иметь значительно улучшенные показатели.
При использовании таких процессоров измерение каждым чувствительным элементом может осуществляться постоянно, что позволяет сформировать камеру для распознавания приближения объекта, работающую с высокой скоростью сканирования.
Комбинирование этого с датчиком прикосновения, состоящим из горизонтального массива ITO управляющих элементов, находящихся позади вертикального массива ITO чувствительных элементов (см. фиг.22), приводит к получению простого, но мощного сенсорного экрана с множественным прикосновением.
Очень большие сенсорные экраны с размером 100 дюймов по диагонали или больше, вероятно, потребуют использования тонких проводов в качестве чувствительных и управляющих элементов (см. фиг.18). Благодаря меньшей емкостной связи между элементами х и у, возможность "маскирования" таких экранов не такая эффективная, как в ситуации, когда используются проводники в форме пластины. При использовании провода эффективность может быть на уровне 25% или ниже по сравнению с 95% для материалов в виде пластин. Соответствующие алгоритмы, однако, все еще будут доступны для использования этих данных, для выделения информации, необходимой для детектирования точных положений множества пальцев на экране.
Дополнительная информация, однако, может быть получена в результате сканирования сенсорного экрана с х элементами, действующими как датчики, и у элементами, действующими как управляющие элементы, чередующимися с у элементами, действующими как датчики, и х элементами, действующими как элементы управления. Результаты обоих таких сканирований могут быть затем скомбинированы. Эти два сканирования можно рассматривать как предварительные и вторичные сканирования.
Процессор высокой мощности и контроллер, позволяющий выполнять сенсорное определение нескольких вводов одновременно, позволяют сканировать очень большие, с высокой разрешающей способностью, сенсорные экраны с тонким проводом несколько сотен раз в секунду, что позволяет использовать такой сенсорный экран как высокоскоростной сенсорный экран с множественным прикосновением, который позволяет детектировать и отслеживать десятки, если не сотни, вводов пользователя одновременно.
Режимы работы с процессором с малой мощностью
Если используется процессор с малой мощностью, сканирующий все чувствительные зоны одновременно, существенно уменьшается скорость отклика сенсорного экрана. Полное сканирование сенсорного экрана при использовании 32×32 чувствительных зон подразумевает получение 1024 измерений на сканирование. Процессор, который позволяет выполнять 50 сканирований в секунду, когда его используют для сканирования кромки х/у сенсорного экрана с 32×32 направлениями, мог бы обеспечить только три сканирования в секунду в режиме полной маски. Это слишком медленно для отслеживания каких-либо движений пальцев, поэтому используются улучшенные технологии сенсорного определения, для достижения высокой скорости отклика.
Большинство способов, описанных ниже, используют для повышения функциональных возможностей сенсорного экрана, в которых используется очень простой электронный контроллер, и который не обязательно требуется при использовании контроллеров с большой мощностью.
Если элементы х и у являются взаимозаменяемыми, то есть оба могут действовать как датчики и контроллеры, тогда для большей части времени экран может использоваться, как простой сенсорный экран, сканирующий кромку с "одним прикосновением". Для сенсорного экрана с разрешением 32×32 это приведет приблизительно к шестнадцатикратному увеличению скорости по сравнению с чувствительным определением каждой одной из 1024 чувствительных зон. Когда детектируют два пальца, как обозначено двумя пиками в любом из чувствительных массивов, избирательное маскирование можно использовать вокруг положений, обозначенных пиками, для исключения неоднозначности двух истинных положений прикосновения из четырех возможных обозначенных положений. Если детектируют три пальца, то аналогичный процесс можно использовать для устранения неоднозначности истинных трех положений прикосновения из девяти возможных положений. Аналогичные процессы могут повторяться для четырех пальцев, при устранении неоднозначности среди 16 возможных положений и для пяти пальцев или больше.
Результаты, полученные в результате мультиплексированного сканирования х/у, можно использовать для точного определения положения пальцев, и маскирование можно использовать просто для устранения неоднозначности, когда присутствует больше чем один палец. В таких примерах, поскольку маскирование просто используется для логики, то есть для выбора между одним вариантом выбора и другим, результаты сканирования для маскирования не обязательно должны быть такими же точными, как потребовалось бы, если бы их использовали для точного определения положения пальцев. Поэтому, может быть возможным сэкономить время путем воплощения сканирования с выборочным маскированием, которое является быстрым и менее точным, которое можно было бы скомбинировать с результатами мультиплексированного сканирования х/у, для определения положения пальцев. Такая обработка может быть выполнена быстрее, чем определение положения пальцев, исключительно используя способ маскирования.
В качестве альтернативы сканирования кромки или если элементы х и у не являются взаимозаменяемыми, тогда можно использовать избирательную последовательность маскирования (см. фиг.5), такую как маскирование с последовательной аппроксимацией, для ускорения детектирования пальца. Вместо выбора каждого из управляющих элементов, один за другим, блоки экрана могут быть маскированы для тестирования, находится ли палец в данной зоне или нет. Первая маска может детектировать, находится ли палец в верхней или в нижней половине экрана. Если определяют, что палец находятся в нижней половине экрана, тогда трети четверти могут быть маскированы, оставляя четвертую четверть не маскированной. Если определяют, что палец находится в четвертой четверти, тогда семь восьмых экрана могут быть маскированы, оставляя последнюю восьмую не маскированной, и так далее, до тех пор, пока положение пальца не будет найдено. Таким образом, палец может быть найден за пять сканирований, в отличие от 32 сканирования, обеспечивая приблизительно шестикратное увеличение скорости детектирования.
Когда используются чувствительные элементы полной ширины, может стать возможным использовать элементы у в качестве чувствительных элементов, поскольку они могут быть полностью экранированы чувствительным слоем х (см., например, фиг.22). Если все элементы у соединены с сигналом активной объединительной панели, тогда чувствительные элементы х можно использовать самостоятельно для определения, произошло или нет прикосновение к одному или больше из этих элементов х. Если прикосновение не произошло ни к одному из элементов, тогда сканирование элемента х, когда все управляемые элементы у соединены с активным сигналом объединительной панели, может продолжаться до тех пор, пока не будет детектировано прикосновение. Когда прикосновение детектировано, тогда можно использовать маскирование, для определения местонахождения вдоль каждого из элементов х, в которых произошло прикосновение. Это может быть достигнуто, используя широкое маскирование (режим 1 - см. ниже), или узкое маскирование (режим 2 - см. ниже).
Один или больше вариантов осуществления, раскрытых здесь, может работать в одном или больше из следующих режимов маскирования во время работы.
Режим 1 (Широкая маска) - Заземление всех управляющих элементов, за исключением одного.
Например, на фиг.6, на которой показан мультиплексированный массив 8×8, электропроводные элементы у могут занимать всю площадь задней поверхности массива, но разделены на 8 изолированных горизонтальных полос. Электропроводные элементы х находятся перед слоем у, но изолированы от него. Элементы х могут занимать всю площадь, как и на фиг.22, или могут быть относительно узкими, как на фиг.6. Если используются узкие элементы х, тогда неиспользуемые области слоя х могут быть оставлены как изолированные островки с плавающим потенциалом. На фиг.22 только х элементы могут быть чувствительными и элементы у можно использовать для избирательной десенсибилизации большей части этих чувствительных элементов х.
Если семь из восьми элементов у будут соединены с землей и восьмой элемент оставлен с плавающим потенциалом или соединен с активным сигналом объединительной панели, тогда только части чувствительных элементов х, которые находятся перед незаземленным элементом у, будут чувствительны для малого заземляющего эффекта приближающегося пальца. Любой палец, расположенный рядом с частями чувствительных элементов х, но перед заземленными элементами у, будет практически не детектируемым.
Незаземленный элемент, как описано выше, может быть оставлен с плавающим потенциалом или может быть соединен с активным сигналом объединительной панели. Использование активного сигнала объединительной панели может быть предпочтительным, поскольку это приводит к меньшей емкостной связи между чувствительными элементами х, но может означать, что электронное устройство является несколько более сложным, чем, если бы элемент у был оставлен с плавающим потенциалом. Тот факт, что элементы у покрывают всю площадь и соединены с активной объединительной панелью или с землей, может обеспечить то, что вся задняя сторона сенсорного экрана постоянно является нечувствительной для прикосновения с неправильной стороны. Если элемент у будет оставлен с плавающим потенциалом, тогда этот элемент будет чувствителен к емкостной связи пальца с задней стороны экрана, хотя палец может влиять в равной степени на все элементы х, и, таким образом, не будет создавать какие-либо проблемы.
Большую часть времени к кнопочной панели или к сенсорному экрану не прикасаются, но при этом от нее требуется быть готовой детектировать палец, приближающийся к экрану в любой момент времени. В течение такой фазы "ожидания" все из элементов у могут быть соединены с активным сигналом объединительной панели таким образом, что они включены, и х чувствительным элементам может быть разрешено выполнять сенсорное определение нового прикосновения по всему экрану. Как только прикосновение будет детектировано, экран может быть преобразован в режим маски, например, путем заземления всех элементов у, за исключением одного. Элемент у, который не был заземлен, может быть соединен с активным сигналом объединительной панели, и все х чувствительных элементов могут быть сканированы для каждой вариации маски, для детектирования положения любых пальцев.
Когда прикосновение прекращается, тогда сенсорный экран может вернуться обратно в его исходный режим, где все элементы у соединены с активным сигналом объединительной панели и только х чувствительных элементов сканируют.
Рассматривая пример, показанный на фиг.2, если у3 является незаземленным (и поэтому разрешен) и у1, у2 и у4 - у8 все являются заземленными (и, поэтому, отключенными), тогда все из коротких сегментов элементов х в непосредственной близости к у3 будут чувствительны к находящемуся рядом с ними пальцу. Любые пальцы, находящиеся рядом с сегментами элементов х в непосредственной близости к у1, у2 и у4 - у8, будут не детектируемыми. Таким образом, подключая только у3 к активному сигналу объединительной панели, обеспечивается возможность детектирования пальца F0 206 в позиции х5, как находящегося в позиции у3. Выполняя аналогичную обработку, когда у6 представляет собой единственный элемент у, который является незаземленным или соединенным с активным сигналом объединительной панели, тогда палец F0 (206) будет не детектируемым, тогда как палец F1 (208) детектируется в позиции х7.
Таким образом, путем последовательного отключения заземления/включения только одного элемента у одновременно, становится возможным сканировать весь сенсорный экран для множества пальцев и идентифицировать места расположения пальцев без неоднозначности. Такая обработка сканирования может непрерывно повторяться для отслеживания движения пальцев.
Также возможно использовать интерполяцию, для определения положения пальцев между чувствительными элементами. Например, пальцы между двумя чувствительными элементами х приведут к малым значениям считывания для обоих чувствительных элементов х. Динамическая емкость или "проецируемая емкость" сенсорных экранов и кнопочных панелей может иметь толстый слой стекла перед сенсорным экраном, и это стекло может помогать при интерполяции между разными элементами х и вдоль с по-разному сенсибилизированными длинами чувствительных элементов х. Слабо проводящий слой может также использоваться для того, чтобы способствовать интерполяции, путем акцентирования точки контакта и распределения сигнала контакта по убывающему радиусу вокруг точки контакта (например, как описано в патенте UK 2418259.
В примере, где любой из восьми элементов у является незаземленным/разрешенным, каждый элемент х может быть сенсорно определен по одному. Это может означать, что 64 измерений сенсорного определения могут потребоваться для сканирования всего экрана 8×8. Скорость процесса может быть увеличена при сенсорном определении больше, чем одного или даже всех элементов х одновременно. Это может обеспечить более чувствительный сенсорный экран, но требует более сложного контроллера.
Заземление всех, за исключением одного из управляющих элементов (Режим 1), может быть недостатком, с точки зрения дополнительной емкостной загрузки, подключаемой к каждому из чувствительных элементов. В представленном выше примере, 7/8-ых длины всех х чувствительных элементов всегда в большой степени соединены с землей. Динамическая или "проецируемая" емкость относится только к изменениям емкости и абсолютные значения не являются важными. Поэтому, любая сильная емкостная связь с землей не может существенно повлиять на процесс сенсорного определения. Это может означать, однако, что больше времени или большая мощность обработки может потребоваться для детектирования пальца, чем в Режиме 2 (см. ниже), или для простого, не мультиплексированного процесса детектирования по фиг.1b.
Однако сильная связь с землей может обеспечить преимущество, состоящее в не чувствительности системы детектирования к электромагнитным помехам, или, по меньшей мере, в уменьшении влияния электромагнитных помех. Сильная связь с землей также может экранировать сенсорный экран, не позволяя его активировать с неправильной стороны.
Режим 2 (Узкая маска) - Заземление только одного управляющего элемента
Альтернатива заземлению всех элементов управления, за исключением одного, представляет собой заземление только одного элемента управления и соединение всех других элементов управления с активной объединительной панелью. Это может привести к уменьшению сигнала прикосновения, когда палец находится над заземленным элементом, в отличие от его улучшения, как в Режиме 1. Преимущество маскирования в Режиме 2, однако, состоит в том, что он обеспечивает меньшую емкостную перекрестную связь между чувствительными элементами, чем в Режиме 1, ввиду того, что чувствительные элементы связаны через емкостную связь, через активную объединительную панель, а не через плоскость заземлении практически на большей части сенсорного экрана.
Заземление одного элемента, в противоположность заземлению всех, за исключением одного элементов, может предоставить меньшую нагрузку на активную схему объединительной панели и обеспечивает возможность более быстрой работы чувствительной схемы из-за меньшей емкостной нагрузки на землю в системе.
Для системы 8х8, работающей в соответствии с Режимом 1, семь восьмых экрана заземлены, тогда как при работе той же системы в Режиме 3 только одна восьмая экрана будет заземлена. Если используется простая чувствительная система, где один чувствительный вход определяют одновременно, и отмеряют по времени фиксированное количество величин подсчета генератора, тогда заземленные датчики будут колебаться с меньшей скоростью и, поэтому, им потребуется больше времени, чтобы достичь их целевой величины подсчета. Заземление семи восьмых экрана обостряет это неудобство, связанное со временем, приводя к тому, что сенсорный экран работает медленнее. В простом механизме датчика также можно использовать резисторы для соединения линии управления с активным сигналом объединительной панели, и заземление семи восьмых из них приводит к существенной нагрузке на активную схему объединительной панели. В системах с более сложными электронными контроллерами, в случае, когда больше чем один ввод считывают одновременно, и активную объединительную панель активно переключают на ее соответствующий элемент, может отсутствовать преимущество в заземлении одного элемента у одновременно, в отличие от заземления всех, кроме одного элемента у. И, наоборот, фактически, сенсибилизация одного элемента одновременно может обеспечить лучшую маску, чем десенсибилизация одного элемента одновременно.
Маскированный сенсорный экран, работающий в Режиме 2, можно сканировать аналогично Режиму 1, но результаты интерпретируют несколько другим способом, вследствие того факта, что сигнал, вызванный пальцем или пальцами, когда они находятся на маскированном элементе, ослабляется, и сигналы, вызванные другими пальцами на экране, остаются неослабленными.
При использовании мультиплексированного сканирования х/у, с двумя пальцами одновременно, становится возможным исключить неоднозначность, какой из двух пиков х ассоциирован, с которым из двух пиков у, путем избирательного заземления одного из двух чувствительных вводов у, которые позволили получить считывание при прикосновении, и затем определять их влияние на два пика х.
Путем заземления одного из пиков у, его ассоциированный пик х будет десенсибилизирован, показывая, что уменьшенный пик х ассоциирован с элементом у, который был заземлен. Остальной, неослабленный пик х поэтому ассоциируют с другим элементом у.
Режим 3 (блочное маскирование) - Заземление нескольких элементов управления одновременно
Группа из элементов управления может быть одновременно заземлена или может быть оставлена незаземленной. Это можно использовать:
1) для быстрого маскирования больших областей экрана как и при маскировании с последовательной аппроксимацией,
2) для уменьшения удельного сопротивления маскирующего материала путем параллельного включения множества из соседних элементов управления,
3) для распространения маскирования при отслеживании движения пальца в очень медленных системах.
Элементы проводника
Материалы проводников, используемые для элементов у маскирования/управляемых элементов, могут быть изготовлены из любого материала, который является достаточно/обоснованно электропроводным, такого как очень тонкий тянутый или экструдированный металлический провод, железные стержни для армирования бетона, медные полоски, пластинчатый проводящий материал, перфорированный проводящий материал пластины, электропроводная сетка из проводов. Оксид индия - олова (ITO) или оксид сурьмы-олова (АТО), прозрачные электропроводные печатные чернила, такие как чернила из наночастиц, или нанотрубок, или непрозрачные электропроводные печатные чернила, такие как серебряные или графитовые чернила. Аналогичные материалы могут использоваться для элементов х.
Для того чтобы режим 1 работал как можно более эффективно, может потребоваться иметь очень сильное заземление элементов х элементами у. Для достижения этого может быть предпочтительно иметь непрерывно проводящий лист для слоя управляющих элементов у. Это создает сильную емкостную связь между управляющим элементом и чувствительным элементом. Такая связь может легко уменьшить чувствительность чувствительного элемента приблизительно на 90-95%. Малая величина чувствительности все еще сохраняется, но недостаточна для предотвращения практического применения маскирования как средства детектирования и дискриминации множества пальцев на экране одновременно.
Х чувствительных элементов могут представлять собой непрерывный электропроводный лист, сетчатый электропроводный слой, печатный проводник, тонкую электропроводную дорожку или даже тонкий электропроводный провод.
Если только несколько пальцев требуется детектировать в любой момент времени и несколько режимов маскирования необходимо использовать для их подтверждения, тогда может быть принята способность маскирующего ослабления, значительно меньшего, чем 90%. В этих обстоятельствах тонкий провод или сетчатый проводник можно использовать в качестве управляемых элементов для слоя у. Материал такого типа, который не является пластиной, может быть расположен позади чувствительного слоя х или перед чувствительным слоем. Если используется тонкий провод с изоляционным покрытием, тогда, кроме тех мест, где провода х и у пересекают друг друга, два набора элементов могут эффективно находиться в одной плоскости.
Работа в режиме 2 не приводит к образованию такой значительной емкостной связи между элементами х и у, как в режиме 1. При использовании совместно с тонкими проводными чувствительными элементами, такой режим с узкой маской однако может привести к использованию таких низких уровней ослабления, как 25%. Уровни ослабления могут быть улучшены, если компоновка провода будет размещена для достижения максимальной емкостной связи между элементами х и у, как показано на фиг.18, 19 и 20. Использование активной объединительной панели, соединенной с проводами, в то время как они не находятся в режиме сенсорного определения, обеспечивает то, что емкостная перекрестная связь не будет оказывать вредное влияние на работающий экран при использовании в режиме х/у.
Сопротивление проводника
Для прозрачных сенсорных экранов с использованием ITO или АТО поверхностное удельное сопротивление 300 Ом на квадрат или меньше можно рассматривать, как приемлемое. Это может обеспечить возможность отличной степени прозрачности и согласования/балансирования двух слоев ITO/ATO и может обеспечить то, что дорожки не будут видимыми.
В одном варианте осуществления элементы у могут быть очень широкими (фиг.6) и могут оставаться таким по всей ширине (или высоте) экрана. Это может обеспечить возможность использования относительно резистивного материала, который будет использоваться, и обеспечить возможность функционирования больших экранов. Для большей части времени элементы у могут быть просто соединены с землей и к ним не приложен какой-либо флуктуирующий сигнал. В этих обстоятельствах могут не возникать или могут возникать ограниченные проблемы задержки на распространение, ассоциированные с сопротивлением и емкостью, и, поэтому, сопротивление может быть относительно высоким.
В примерах, где элементы у оставлены "плавающими", когда они включены и не соединены с землей, при этом может быть разрешено, чтобы сопротивление элемента у было довольно высоким. Однако если элементы у соединены с сигналом активной объединительной панели, когда они не соединены с землей, может быть существенное ухудшение эффективности в связи с сенсибилизирующей маской из-за времени задержки RC. Может потребоваться, чтобы сопротивление элементов у было относительно низким для предотвращения или уменьшения любой существенной задержки из-за сопротивления/емкости (RC) активного сигнала объединительной панели.
Если элементы у предназначены для только управления и элементы х предназначены только для определения, тогда элементы х могут быть выполнены настолько широкими, насколько возможно (см. фиг.22), и, поэтому, могут быть изготовлены из соответствующего резистивного материала; при этом их сопротивление, в определенной степени, компенсируется их большей шириной. Если они имеют полную ширину, однако, и если элементы управления оставить плавающими, когда они не заземлены, может возникать очень большая емкостная связь между элементами х и элементами у, которая может привести к некоторым перекрестным наводкам и к задержкам с выборками. Если элементы у соединены с активной объединительной панелью, если они не заземлены, тогда емкостная связь не является проблемой.
Существует преимущество в использовании элементов датчика полной ширины, связанное с тем, что большие экраны могут быть изготовлены с использованием относительно резистивного материала, при этом проблемы, связанные с сопротивлением, минимизируются тем, что элементы датчика выполняют настолько широким, насколько возможно, по всему экрану. Когда они включены параллельно, их сопротивление еще дополнительно уменьшается.
Сопротивление управляемых элементов у и чувствительных элементов х может быть уменьшено путем замыкания цепи этих элементов на обоих концах, а не только на одном конце, как показано на фигурах. Замыкание на обоих концах эффективно уменьшает сопротивление этих элементов до четверти их значения с одним замкнутым концом. Высокорезистивные элементы приводят к существенным задержкам времени, связанным с сопротивлением/емкостью (RC) вдоль их длины, что приводит к искажениям сигнала сенсорного определения и к искажениям активного сигнала объединительной панели. Активная объединительная панель наиболее эффективна, когда она находится точно в фазе с сигналом сенсорного определения, и любой сдвиг фазы, связанный с задержками времени RC, снижает ее эффективность и, таким образом, десенсибилизирует чувствительную систему. Сопротивление ITO и АТО может быть достаточно высоким.
"Квадрат" из ITO в виде широкой дорожки 10 дюймов шириной на 1 дюйм охвата, с сопротивление от 300 Ом на квадрат, будет иметь сопротивление 3000 Ом от одного конца до другого. Если он будет замкнут на обоих концах, то его наибольшее сопротивление составит 750 Ом.
Поскольку выбирают больше чем один элемент одновременно, особенно во время ранних этапов последовательной аппроксимации, эффективное сопротивление этих элементов уменьшается, поскольку они, по существу, представляют собой резисторы, включенные параллельно. Если каждый имеет сопротивление 100 Ом, и при выборе 10 штук эффективное сопротивление по экрану будет уменьшено до 10 Ом. Такое уменьшенное сопротивление повышает эффективность маски.
Сопротивление чувствительных и/или управляющих элементов может быть уменьшено путем сканирования в небольших соседних группах. Например, при использовании восьми чувствительных элементов 1-8, вместо сенсорного определения 1, 2, 3, 4, 5, 6, 7, 8 эти элементы могут быть скомбинированы вместе и могут быть сканированы как 1, 12, 123, 234, 345, 456, 567, 678, 78, 8. Поскольку они находятся на кромке и иногда используются по отдельности, элементы 1 и 8 могут быть выполнены более широкими, чем другие элементы, для уменьшения их сопротивления. Управляющие элементы могут быть также скомбинированы аналогичным образом. Эта технология является полезной при отслеживании пальца с помощью медленного контроллера малой мощности, поскольку он расширяет зону вокруг отслеживаемого пальца, и, таким образом, помогает отслеживанию быстро движущегося пальца.
Двойная функциональность
В некоторых вариантах осуществления, в настоящем раскрытии, элементы могут иметь только одну функцию: они могут быть чувствительными элементами или управляющими элементами. В других вариантах осуществления, однако, элементы могут иметь две функции: они могут представлять собой чувствительные элементы в одно время и управляющие элементы в другое время. Способность для всех элементов иметь двойную функциональность, однако, может зависеть от материала экрана и компоновки. Материалы плоского типа, такие как ITO, могут вызывать проблему, если они закрывают слишком много экрана.
В случае, когда набор элементов расположен позади другого набора элементов, должен быть обеспечен достаточный зазор между элементами в передней части экрана, для обеспечения возможности сенсорного определения пальцев с помощью элементов в задней части экрана. Сетчатый материал с зазорами в нем или тонкие проволочные элементы могут не иметь такие проблемы, поскольку они не закрывают весь экран. Поэтому, сетчатый материал с зазорами или тонкие проволочные элементы можно рассматривать, как предпочтительные в некоторых вариантах осуществления.
Использование только проволочных элементов может обеспечить возможность изготовления очень простого экрана, который имеет толщину бумаги, который можно плотно сворачивать, складывать и даже сгибать без повреждения и который можно масштабировать до очень больших размеров, таких как 100 дюймов и намного больше.
Возможно иметь два отдельных набора элементов у: управляемый/управляющий набор и чувствительный набор. Наборы элементов не обязательно должны быть равны по количеству. Когда используется управляемый набор, тогда чувствительный набор можно оставить в режиме высокого полного сопротивления таким образом, чтобы чувствительный набор элементов эффективно был не функциональным. Когда используют чувствительный набор, тогда управляющий набор должен быть соединен с активным сигналом объединительной панели (см., например, фиг.9 и 10).
Опорные данные "без прикосновения"
Для каждого режима детектирования может генерироваться опорная таблица "без прикосновения", при использовании "проецируемой емкости" в качестве способа сенсорного определения. Эти значения также могут медленно обновляться путем их постоянного сравнения с текущими значениями и с незначительным постепенным приращением или постепенным уменьшением значений "без прикосновения" так, чтобы они медленно отслеживали текущие значения.
Если используется ряд разных режимов, тогда опорная таблица "без прикосновения" может использоваться для всех режимов, которые должны использоваться.
Для простой чувствительной системы на кромке х/у, каждое из значений х и у считывают при включении питания и значения х и у сохраняют, как опорное значение "без прикосновения" для этого режима.
Для режима 1 опорная таблица "без прикосновения" может генерироваться во время включения питания сенсорного экрана, когда можно предположить, что никто не прикасается к экрану. Может быть выполнено полное сканирование всех, за исключением одного элемента у, заземленных одновременно, для определения значения "без прикосновения" для каждого местоположения сенсорного определения (существуют 64 местоположения сенсорного определения для экрана восемь на восемь).
Для режима 2, только элемент у заземлен последовательно через весь экран и измеренные значения х принимают как опорные значения "без прикосновения".
Для режима 3 или в случае, когда больше, чем один элемент заземлен одновременно, затем формируют опорное значение "без прикосновения", во время включения питания, для каждой возможной маски, которая будет использоваться.
Чрезмерное маскирование
Один способ чрезмерного маскирования состоит в заземлении всех, кроме одного из управляемых элементов у, и всех, кроме одного из чувствительных элементов х. Такой вариант осуществления может подразумевать, что х элементы, которые могут работать как управляемые элементы или как чувствительные элементы и у элементы, которые могут работать как управляемые элементы. Такой вариант осуществления оставляет малое окно чувствительности для одного чувствительного элемента.
Чрезмерное маскирование может использоваться в режимах 1, 2 или 3.
В другом варианте осуществления чрезмерного маскирования оба элемента х и у всегда используются как управляющие элементы и никогда не используются как чувствительные элементы. Один третий, универсальный слой, используется как одиночный чувствительный элемент. Такой третий слой может быть помещен между двумя маскирующими слоями. Маскирование может использоваться в режимах 1, 2 или 3
Вместо помещения в середине чувствительный слой 2300 может находиться позади или даже спереди. Если он с задней стороны, тогда два маскирующих слоя могут оба быть выполнены сетчатыми.
Для такого способа может не потребоваться использование каких-либо аналоговых мультиплексоров, поскольку присутствует только один чувствительный элемент. Все другие элементы представляют собой управляемые элементы и могут быть либо соединены с землей, оставлены с плавающим потенциалом или соединены с активным сигналом объединительной панели.
Следует понимать, что, хотя здесь были сделаны ссылки на "элементы х и у" и также "горизонтальные и вертикальные элементы", эти термины не следует рассматривать как ограничительные и они могут рассматриваться как взаимозаменяемые. Термины рассматриваются, как удобные для представления ясного описания вариантов осуществления изобретения. В некоторых вариантах осуществления любые ссылки на комбинацию "горизонтальных управляемых элементов у и вертикальных чувствительных элементов х" можно рассматривать как также охватывающие "горизонтальные чувствительные элементы у и вертикальные управляемые элементы х ".
В некоторых примерах, если управляемые элементы изготовлены из твердого материала в виде пластины, тогда управляемые элементы должны находиться позади чувствительных элементов так, чтобы они не экранировали прикосновение пользователя для чувствительных элементов. В примерах, где слои или элементы описаны, как находящиеся "позади" или "впереди" других слоев или элементов, эти термины можно рассматривать как относящиеся к передней стороне сенсорного экрана, с которой пользователь будет взаимодействовать.
Раскрытые здесь варианты осуществления относятся к сенсорным экранам с восемью элементами х и восемью элементами у. Это следует понимать, как только один пример сенсорного экрана, и при этом варианты осуществления изобретения могут использоваться, и на практике может присутствовать любое количество элементов х и любое количество элементов у и также любое количество вводов и выводов.
Один или больше вариантов осуществления, раскрытых здесь, относятся к способу достижения свойств однозначности не мультиплексированного массива при использовании малого количества чувствительных элементов мультиплексированного массива. Это также может обеспечить возможность детектирования больше чем одного пальца на сенсорном экране одновременно при относительно малом количестве вводов. В некоторых вариантах осуществления возможно детектировать, по меньшей мере, 16 пальцев одновременно на массиве 8х8, используя только восемь чувствительных вводов и восемь управляемых выводов.
В одном или больше вариантах осуществления можно использовать тот факт, что детектирование динамической емкости или "проецируемой емкости" имеет очень широкий динамический диапазон, позволяет надежно измерять очень малые локализованные изменения емкости путем постоянного регулирования глобально изменяющихся условий окружающей среды, в основном, не связанных с абсолютными значениями, и позволяет измерять емкость пальца относительно земли. В результате сильной связи большей части экрана с землей становится возможным маскировать большую часть экрана для обеспечения того, что только малая часть его будет чувствительной к прикосновению в любой момент времени. Такая технология может наложить большую нагрузку, связанную с заземлением, на систему детектирования, и динамическая емкость может позволять надежно детектировать меньшие изменения емкости, чем одна часть на тысячу, даже в условиях большой степени загрузки заземления, и может быть выполнена с возможностью получения пригодных для использования результатов в этих условиях.
В некоторых вариантах осуществления одиночный линейный чувствительный к прикосновению элемент, такой как кусок провода или полоску металла, которая соединена со схемой детектирования прикосновения, можно рассматривать как детектор динамической емкости или детектор "проецируемой емкости". Детектор может детектировать изменения емкости относительно земли находящегося поблизости объекта или пальца и детектор может быть маскирован от детектирования таких объектов путем помещения детектирующего элемента очень близко к заземленной электропроводной пластине.
Если заземленная пластина находится между чувствительным элементом и пальцем и в заземленной пластине имеется отверстие, тогда палец может быть детектирован в месте, где находится отверстие, но не может быть детектирован в местах без отверстия.
Если чувствительный элемент находится между заземленной пластиной и пальцем и емкостная связь чувствительного элемента заземленной пластины намного больше, чем связь с пальцем, тогда палец может быть очень трудно детектировать. Однако если имеется отверстие в заземленной пластине, тогда очень малая десенсибилизация возникает в этой области, поэтому палец можно детектировать с использованием чувствительного элемента в месте над отверстием.
Хотя элемент детектирования может быть в большой степени нагружен детектированием заземленной пластины вдоль большой части ее длины, поскольку динамическая емкость связана с изменениями емкости, а не с абсолютными значениями, палец, приближающийся к отверстию в заземленной пластине, может быть детектирован.
Если заземленная пластина находится между чувствительным элементом и пальцем, тогда может быть сформировано отверстие, оставляя часть заземленной пластины, с электрически плавающим потенциалом, то есть не соединенной с землей. Такой незаземленный участок пластины будет действовать как пластина конденсатора с плавающим потенциалом и будет образовывать емкостную связь между пальцем и чувствительным элементом.
Если чувствительный элемент находится между заземленной пластиной и пальцем, тогда может быть сформировано отверстие, таким образом, что оставляют часть этой пластины незаземленной. В качестве альтернативы, отверстие может быть сформировано путем соединения этой части пластины с активным сигналом объединительной панели. Активный сигнал объединительной панели получают из сигнала, используемого для того, чтобы сделать емкостной датчик прикосновения чувствительным к прикосновению. В идеале, он имеет такую же форму колебаний, как и форма колебаний датчика прикосновения с той же амплитудой, формой и фазой. Поскольку он точно следует форме колебаний чувствительного элемента, по существу, отсутствует емкостная связь между пластиной и чувствительным элементом. Это делает то, что чувствительный к прикосновению элемент выглядит, как будто за ним ничего не расположено, и выглядит, как будто в этом месте имеется отверстие или окно в заземленной пластине, позади датчика прикосновения. Поэтому, датчик прикосновения остается чувствительным к прикосновению в этом месте, хотя он является не чувствительным к прикосновению вдоль остальной части его длины, где он все еще имеет сильную емкостную связь с заземленной пластиной.
Окно может электронным способом перемещаться вдоль датчика прикосновения, благодаря наличию последовательности заземленных пластин позади датчика прикосновения, так что при этом одну из них, одновременно, последовательно выбирают, оставляя с плавающим потенциалом или соединенной с активным сигналом объединительной панели (АВР). Эта последовательность может постоянно повторяться, таким образом, что движение множества пальцев на линейном датчике можно детектировать и отслеживать.
Заземленная пластина может быть расширена так, что она будет охватывать массив линейных чувствительных элементов, и отверстие может быть заменено широкой прорезью по всей ее ширине. Таким образом, становится возможным сформировать маску, которая позволяет сканировать множество чувствительных элементов одновременно. Такая маска показана на фиг.3. Темный участок чувствительного элемента обозначает место, где она является чувствительной к прикосновению. Маска делает эти элементы не чувствительными к прикосновению. По мере того как открытое окно в маске движется вверх по чувствительному массиву, разные части чувствительных элементов становятся чувствительными к прикосновению, в то время как ранее чувствительные части теряют свою чувствительность. Поэтому, палец может быть детектирован только, когда он прикасается или находится в очень близости к окну в маске. Если имеется восемь чувствительных элементов и восемь положений для окна в маске, тогда могут быть детектированы 64 пальца. Аналогичная ситуация детектирования не мультиплексированного массива с 64 вводами по фиг.1b, но с использованием только восьми чувствительных вводов. Такая компоновка может быть масштабирована, вплоть до компоновки, которая формирует очень большие чувствительные массивы, детектирующие множество пальцев, но с относительно малым количеством вводов.
Хотя возможность прикосновения множества пальцев подразумевает то, что множество пальцев прикасаются к экрану одновременно, большую часть времени к экрану не прикасаются вообще или используют для одиночного прикосновения. Иногда он также используется для двойного прикосновения и реже для десяти или больше прикосновений.
Путем изменения функций элементов у с заземленных/на незаземленные выводов на чувствительные входы, становится возможным преобразовать сенсорный экран с множеством прикосновений в стандартный высокоскоростной сенсорный экран с одним прикосновением.
Это может подразумевать, что элементы х выполнены достаточно узкими, чтобы обеспечить возможность определенного емкостного сенсорного определения с помощью элементов у через слой х с пальцем, который приближается к передней стороне экрана.
В некоторых примерах становится возможным перевести экран в простой режим с одним прикосновением большую часть времени и использовать результаты, детектированные им, для переключения в режим с двумя или множеством прикосновений, если требуется. Преимущество такой функции состоит в том, что намного меньшая мощность обработки используется в режиме одного прикосновения и частота сканирования получается намного более высокой. Одно сканирование с множеством прикосновений может занять, по меньшей мере, в 4 раза больше времени, чем сканирование с одним прикосновением, и может занять в десять раз больше времени. Поэтому, более интенсивное сканирование с множеством прикосновений может быть воплощено только, когда требуется обеспечивать, таким образом, более эффективный и более чувствительный сенсорный экран.
Если детектируется одиночное прикосновение, как показано одним пиком х и у, тогда система может оставаться в режиме одного прикосновения. Если только детектируются два прикосновения или больше, как показано двумя или больше пиками в сканированиях х и/или у, тогда система может переключаться в режим с двумя прикосновениями или в режим с множеством прикосновений.
Поскольку мультиплексированное сканирование х/у намного быстрее и является более чувствительным, чем маскированное сканирование, возможно работать в мультиплексированном режиме х/у большую часть времени и просто использовать маскирование время от времени, тогда и когда это требуется, или через регулярные интервалы для устранения неоднозначности данных, получаемых в результате использования мультиплексированного сканирования.
Устранение неоднозначности при мультиплексированном сканировании (режим 2) приводит к тому, что не обязательно использовать сканирование с полной "маской". Мультиплексированные результаты сканирования уже покажут, где находятся пальцы, таким образом, что одно или больше из этих положений по отдельности могут быть маскированы для устранения неоднозначности. При двух пальцах требуется только одно считывание маскированного датчика для устранения неоднозначности ситуации. Такая функция может быть выполнена менее чем за 1 мс, обеспечивая, таким образом, чувствительный сенсорный экран.
Результаты, полученные из мультиплексированного сканирования х/у, можно использовать для точного определения положения пальцев и маскирование может просто использоваться для устранения неоднозначности, когда присутствует больше, чем один палец. В таких примерах, поскольку маскирование просто используется для логики, то есть для выбора между одним и другим вариантом выбора, результаты мультиплексированного сканирования не обязательно должны быть такими же точными, как если бы их использовали для точного определения положения пальцев. При этом возможно, таким образом, сэкономить время, путем воплощения сканирования выборки маски, которое является быстрым и менее точным, которое можно скомбинировать с результатами мультиплексированного сканирования х/у, для определения положения пальцев. Такая обработка может быть выполнена быстрее, чем определение положения пальцев, исключительно используя способ маскирования.
Один или больше вариантов осуществления изобретения могут быть определены на основе следующих пронумерованных пунктов.
1) Электронный переключатель для емкостного чувствительного элемента близкого присутствия и прикосновения, который может подавлять сенсорное определение близкого присутствия и прикосновения или разрешать сенсорное определение близкого присутствия и прикосновения, с электронным управлением, либо с использованием сильной емкостной связи чувствительного элемента с землей, для предотвращения сенсорного определения прикосновения, или путем соединения чувствительного элемента с активным сигналом объединительной панели, полученным из или общим для сигнала сенсорного определения, для того чтобы обеспечить возможность сенсорного определения прикосновения.
2) Электронный переключатель для емкостного чувствительного элемента близкого присутствия и прикосновения, который может препятствовать чувствительному определению прикосновения в непосредственной близости или обеспечить возможность сенсорного определения в непосредственной близости и при прикосновении, под электронным управлением, или с помощью сильной емкостной связи чувствительного элемента с землей, для прекращения сенсорного определения прикосновения или путем электронного удаления связи, которая представляла собой сильную емкостную связь чувствительного элемента с землей, для того чтобы обеспечить возможность сенсорного определения прикосновения.
3) Последовательность переключателей по п.1, которые помещают рядом друг с другом и используют как маску для обеспечения возможности для выбранных частей линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения детектировать прикосновение и препятствовать детектирование прикосновения другими частями.
4) Последовательность переключателей по п.1, которые помещены рядом друг с другом и используются как маска для препятствования детектирования прикосновения большей частью линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения, но под электронным управлением, которое обеспечивает возможность одного переключателя одновременно "открываться", для того чтобы обеспечить возможность сенсорного определения прикосновения в линейной последовательности от одного конца чувствительного элемента к другому.
5) Последовательность переключателей по п.2, которые размещены рядом друг другом и используются как маска для препятствования для большей части линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения детектировать прикосновения, но под электронным управлением, которое обеспечивает возможность для одного переключателя одновременно "открываться", для того чтобы обеспечить возможность сенсорного определения прикосновения в линейной последовательности от одного конца чувствительного элемента до другого.
6) Последовательность переключателей по п.4, которые являются достаточно широкими для маскирования массива линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения, переключатели размещены рядом друг с другом и используются как маска для препятствования для большинства линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения детектировать прикосновение, но под электронным управлением, которое обеспечивает возможность для одного переключателя одновременно "открываться", для того чтобы формировать широкое, тонкое окно, которое охватывает все элементы сенсорного определения прикосновения, что обеспечивает возможность восприятие сенсорного определения прикосновения в линейной последовательности от одного конца каждого из чувствительных элементов до другого.
7) Последовательность переключателей по п.5, которая является достаточной широкой для маскирования массива линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения, переключатели размещены рядом друг с другом и используются как маска для препятствования для большей части линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения детектировать прикосновение, но под электронным управлением, которое обеспечивает возможность для одного переключателя одновременно "открываться", для того чтобы формировать широкое, тонкое окно, которое охватывает все элементы, чувствительные к прикосновению, что обеспечивает возможность сенсорного определения прикосновения в линейной последовательности от одного конца каждого из чувствительных элементов до другого конца.
8) Последовательность переключателей по п.1, которые помещены рядом друг с другом и используются как маска для обеспечения для большей части линейных емкостных элементов, чувствительных к определению непосредственной близости и прикосновения детектировать прикосновение, но под электронным управлением, которое обеспечивает возможность одного переключателя одновременно "закрываться", для того чтобы препятствовать сенсорному определению прикосновения, в выбранных частях чувствительного элемента.
9) Последовательность переключателей по п.2, которые помещены рядом друг с другом и используются как маска для обеспечения возможности для большей части линейного емкостного элемента сенсорного определения непосредственной близости и прикосновения детектировать прикосновение, но под электронным управлением, которое обеспечивает возможность для одного переключателя одновременно "закрываться", для того чтобы препятствовать сенсорному определению прикосновения в выбранных частях чувствительного элемента.
10) Последовательность переключателей по п.8, которые являются достаточно широкими, для того, чтобы маскировать массив линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения, переключатели размещены рядом друг с другом и используются как маска для обеспечения возможности для большей части линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения детектировать прикосновение, но под электронным управлением, которое обеспечивает для одного переключателя одновременно возможность "закрываться", для того чтобы формировать широкое, тонкое окно, охватывающее все элементы чувствительного прикосновения, которые препятствуют чувствительному определению прикосновения в выбранных частях чувствительных элементов.
11) Последовательность переключающих и чувствительных элементов по п.6, в которой переключающиеся элементы и чувствительные элементы, по существу, являются невидимыми для оператора и используются как сенсорный экран для операции с одним пальцем одновременно или с множеством пальцев одновременно.
12) Последовательность переключающих и чувствительных элементов по п.7, в которой переключающие элементы и чувствительные элементы эффективно невидимы для оператора и используются как сенсорный экран для операции с одним пальцем одновременно или множеством пальцев одновременно.
13) Последовательность переключающих и чувствительных элементов, используемая как сенсорный экран по п.11, в которой переключающие элементы имеют функцию, альтернативную функции чувствительных элементов.
14) Последовательность переключающих и чувствительных элементов по п.11, в которой существует второй набор чувствительных элементов, параллельный чувствительным элементам и ортогональный существующим чувствительным элементам, этот второй набор чувствительных элементов функционирует поочередно для переключающих элементов.
15) Последовательность переключающих и чувствительных элементов, используемых как сенсорный экран по п.13, в котором оба набора элементов действуют как датчики в течение большой части времени, но один набор изменяется на переключатели, под электронным управлением, когда детектируют больше чем один палец.
16) Последовательность переключающих и чувствительных элементов по п.13, в которой один набор элементов, поочередно действующий как датчики, затем переключают.
17) Последовательность переключающих и чувствительных элементов по п.11, в котором оба набора элементов могут изменяться с чувствительного на переключающие и наоборот.
18) Последовательность переключающих и чувствительных элементов по п.16, в которой чувствительные и переключающие элементы все выполнены из тонкого провода.
19) Последовательность переключающих и чувствительных элементов по п.17, в которой чувствительные элементы и переключающие элементы все выполнены как тонкий провод.
20) Последовательность переключающих и чувствительных элементов по пп.16 и 17, в которой структура укладки проводов используется для обеспечения максимальных перекрестных емкостных связей между чувствительными элементами х и у.
21) Последовательность переключателей по п.4, которая является достаточно широкой для маскирования массива линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения, переключатели размещены рядом друг с другом и используются как маска для препятствования большей части линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения детектировать прикосновения, но под электронным управлением, что обеспечивает возможность для одного переключателя одновременно "открываться", для того чтобы формировать широкое, тонкое окно, охватывающее все элементы сенсорного определения прикосновения, что обеспечивает сенсорное определение прикосновения в предварительно выбранном порядке.
22) Последовательность переключателей по п.4, которая является достаточно широкой для маскирования массива линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения, переключатели помещены рядом друг с другом и используются как маска для препятствования большей части линейных емкостных сенсорного определения непосредственной близости и прикосновения детектировать прикосновения, но под электронным управлением, которое обеспечивает то, что несколько переключателей одновременно будут "открыты", для того, чтобы сформировать широкое окно, охватывающее все элементы сенсорного определения прикосновения, которое обеспечивает возможность сенсорного определения прикосновения в предварительно выбранном порядке.
23) Последовательность переключателей по п.8, которая является достаточно широкой для маскирования массива линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения, переключатели размещены рядом друг с другом и используются как маска для обеспечения возможности детектирования прикосновения для большей части линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения, но под электронным управлением, что обеспечивает возможность для нескольких переключателей одновременно "закрываться", для того чтобы сформировать широкое окно, охватывающее все элементы, чувствительные к прикосновению, которое препятствует чувствительному определению прикосновения в выбранной части чувствительных элементов.
24) Сенсорный экран по п.11, в котором переключаемые элементы у и чувствительные элементы х выполнены из оксида индия и олова или оксида сурьмы и олова.
25) Сенсорный экран по п.12, в котором переключаемые элементы у и чувствительные элементы х изготовлены из оксида индия и олова или оксида сурьмы и олова.
26) Сенсорный экран по п.11, в котором переключаемые элементы у изготовлены из оксида индия и олова или оксида сурьмы и олова, и чувствительные элементы х изготовлены из тонкого провода.
27) Сенсорный экран по п.12, в котором переключаемые элементы у изготовлены из оксида индия и олова или оксида сурьмы и олова, и чувствительные элементы х изготовлены из тонкого провода.
27) Сенсорный экран по п.11, в котором сенсорный экран работает большую часть времени в мультиплексированном режиме х/у для одного прикосновения, но переключается в режим множества прикосновений, когда детектируют два или больше пальцев.
28) Сенсорный экран по п.12, в котором сенсорный экран работает большую часть времени в мультиплексированном режиме х/у с одиночным прикосновением, но переключается в режим с множеством прикосновений, когда детектируют два или больше пальцев.
29) Сенсорный экран по п.11, в котором сенсорный экран работает большую часть времени в мультиплексированном режиме х/у одного прикосновения, но переключается на второй режим, когда детектируют два или три прикосновения, и в третий режим, когда детектируют больше чем три пальца.
31) Сенсорный экран по п.12, в котором сенсорный экран работает большую часть времени в мультиплексированном режиме х/у с одним прикосновением, но переключается во второй режим, когда детектируют два или три прикосновения, и в третий режим, когда детектируют больше чем три пальца.
32) Последовательность переключателей по п.22, которые являются достаточно широкими для маскирования массива линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения, переключатели расположены рядом друг с другом и используются как маска для препятствования большей части линейных емкостных элементов сенсорного определения непосредственной близости и прикосновения детектировать прикосновения, но под электронным управлением, которое обеспечивает возможность для нескольких переключателей одновременно "открываться", для того чтобы сформировать широкое окно, охватывающее все элементы сенсорного определения прикосновения, которые обеспечивают сенсорное определение прикосновения в порядке, который составляет последовательную аппроксимацию.
33) Сенсорный экран по п.24, в котором управляемые элементы у имеют полную высоту по всей ширине поперек экрана и чувствительные элементы х имеют полную ширину для всей высоты вверх по экрану.
34) Сенсорный экран, состоящий из одного чувствительного элемента, который имеет горизонтальную маску, препятствующую прикосновению позади нее, и вертикальную маску, препятствующую прикосновению перед ней, в которой эти две маски можно сканировать в различных порядках и с различной шириной открывания, для обеспечения возможностей для различных частей элемента сенсорного определения прикосновения детектировать положение прикосновения.
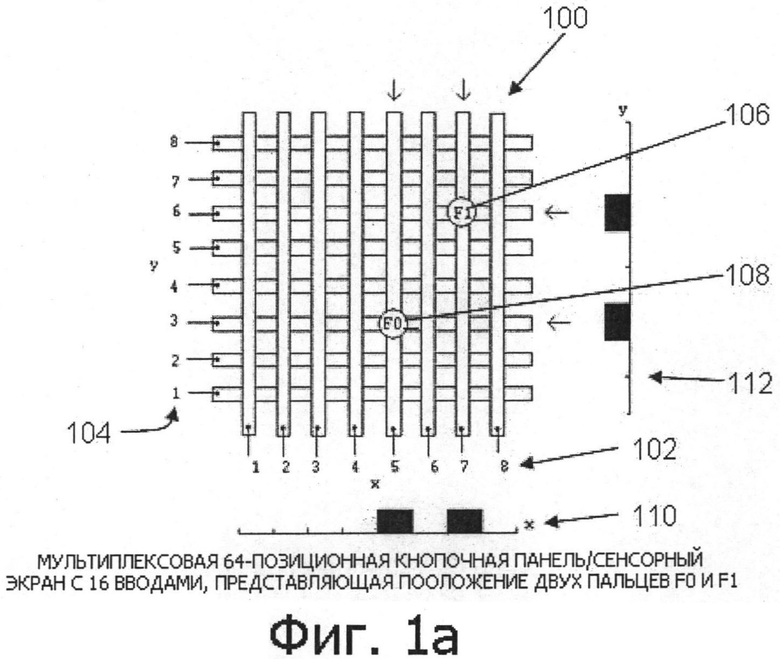
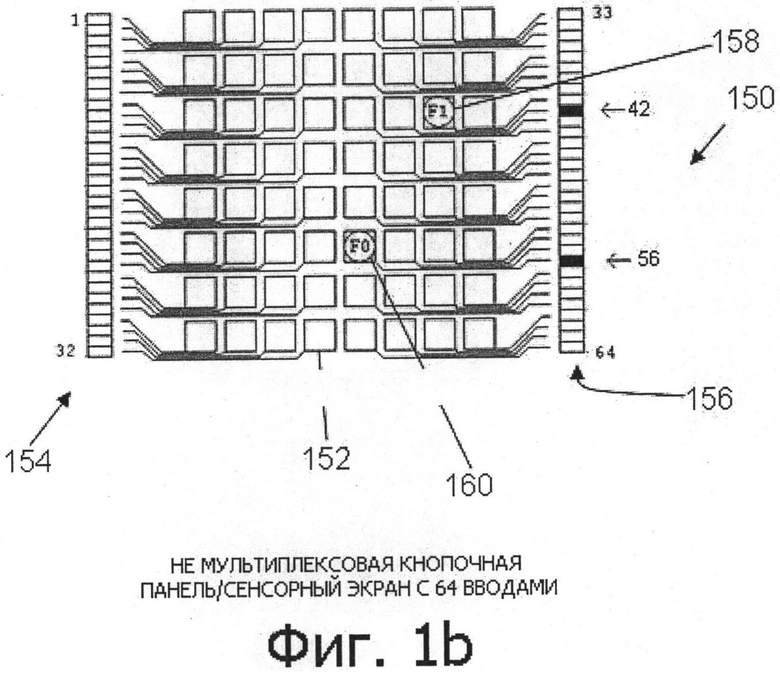
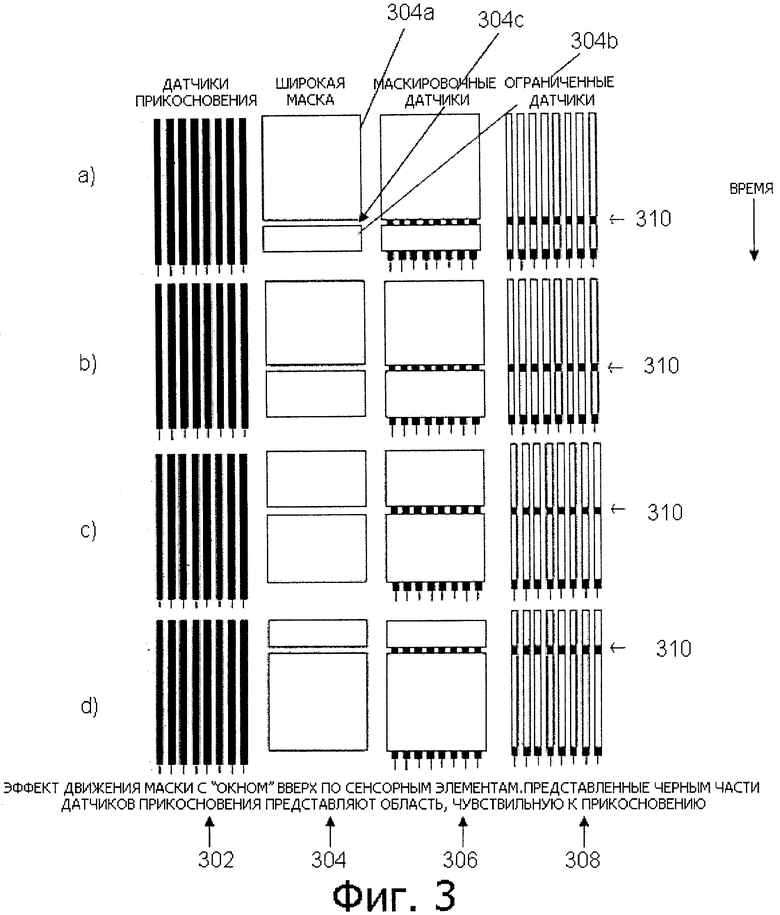
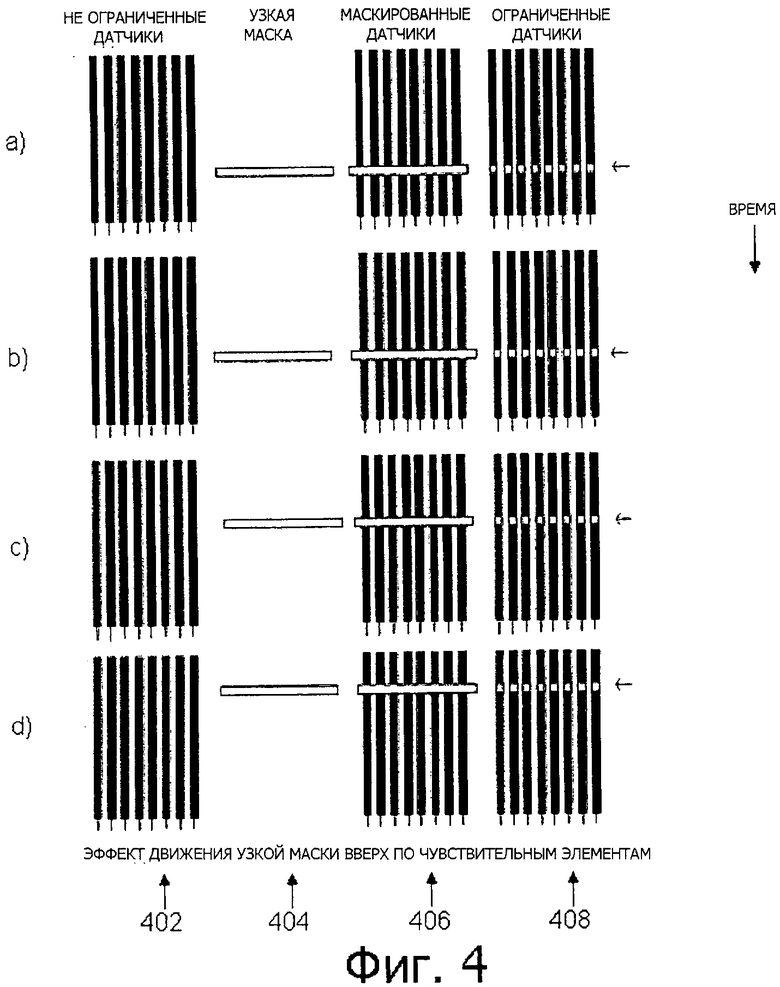
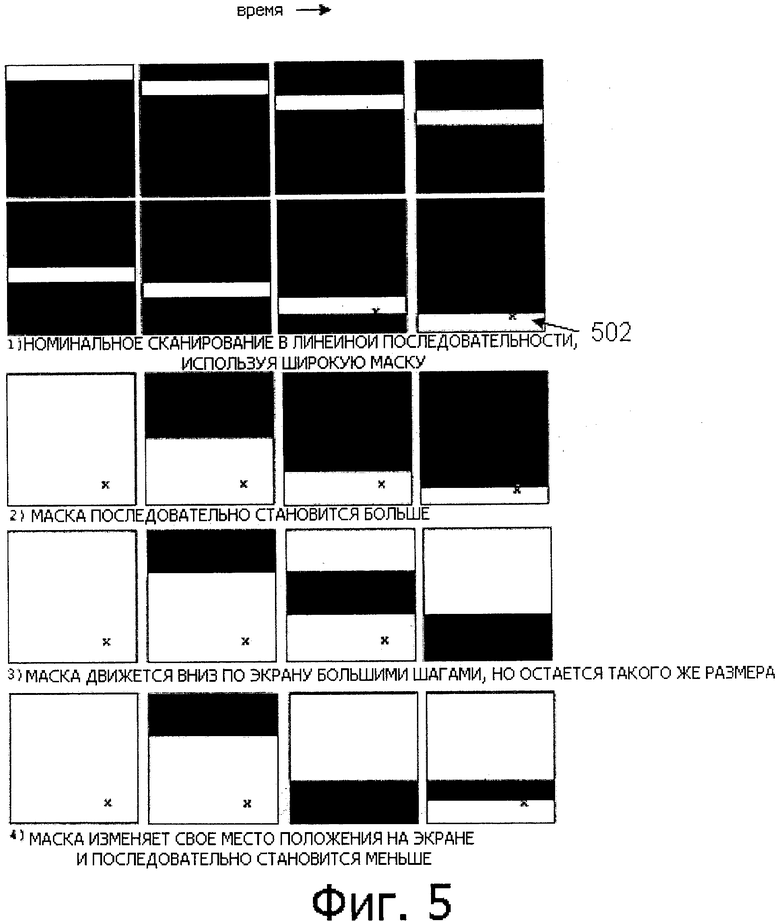
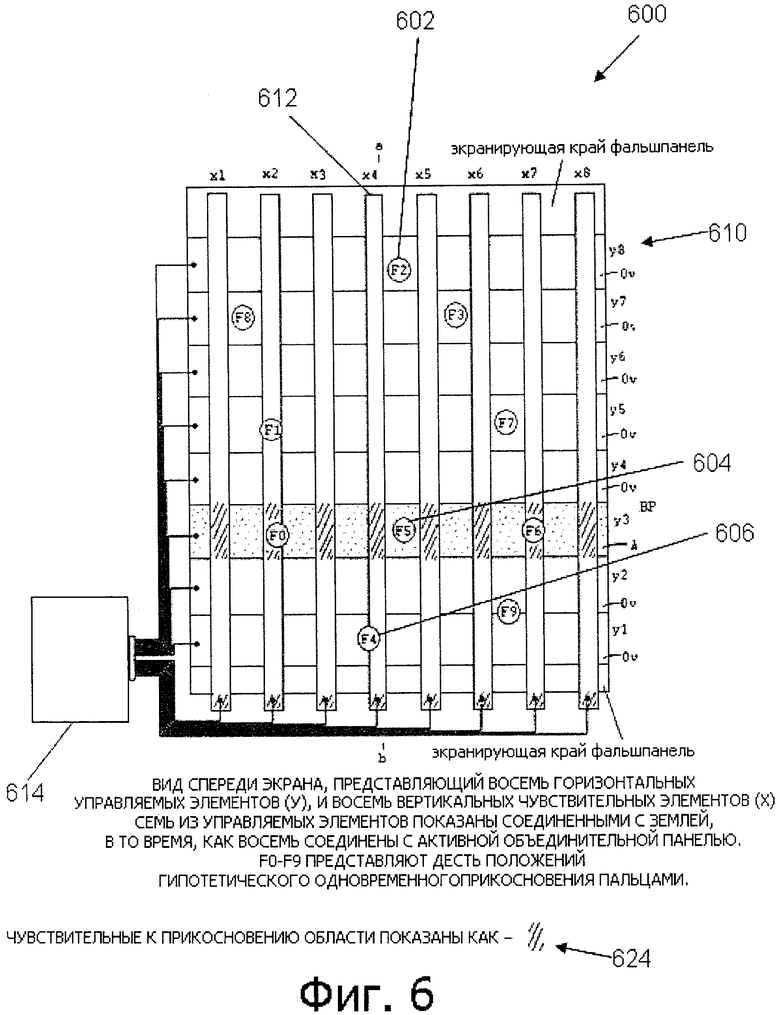
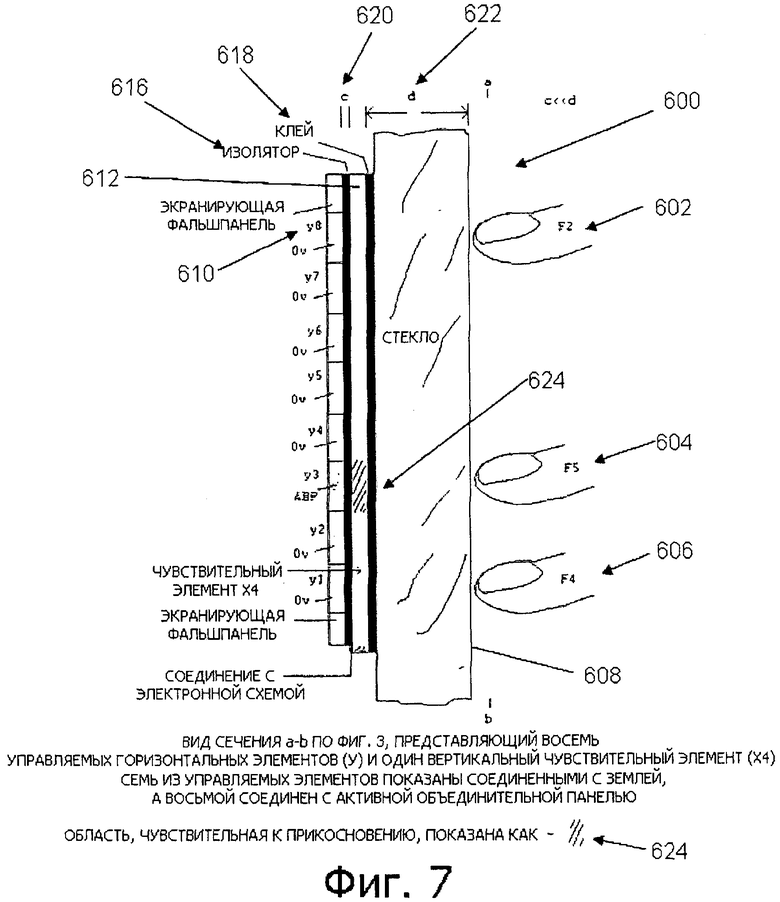
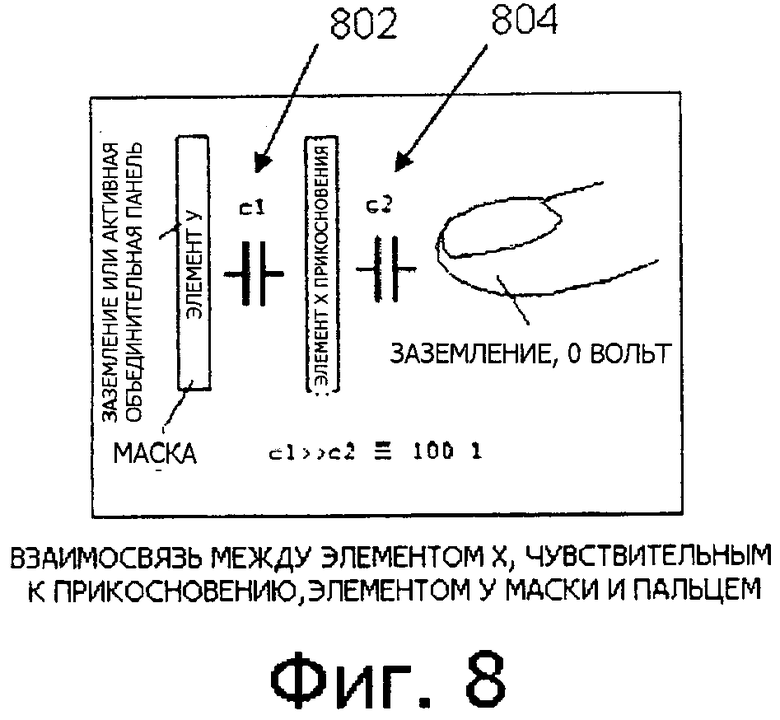
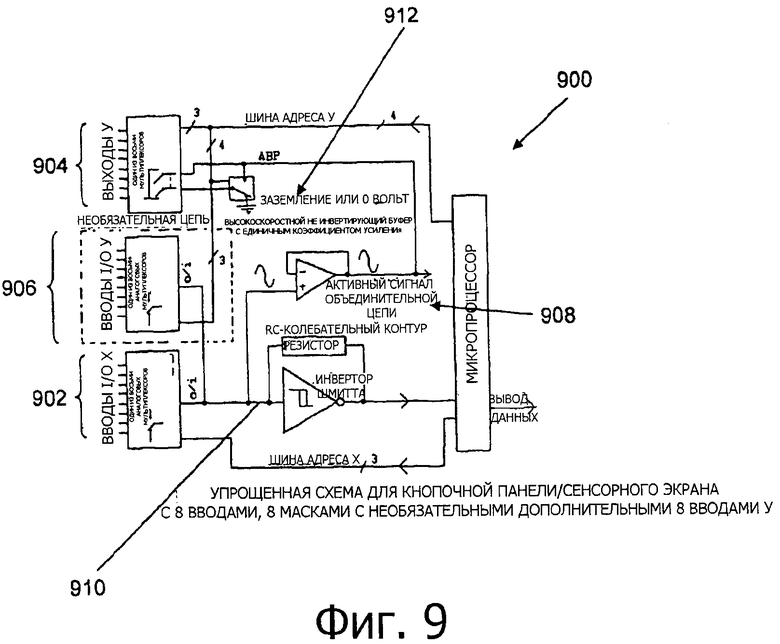
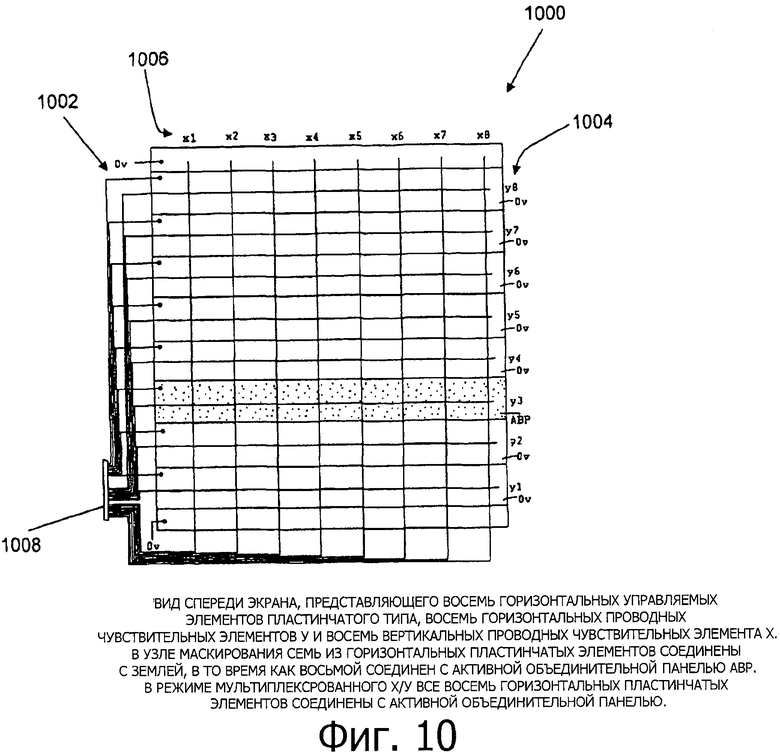
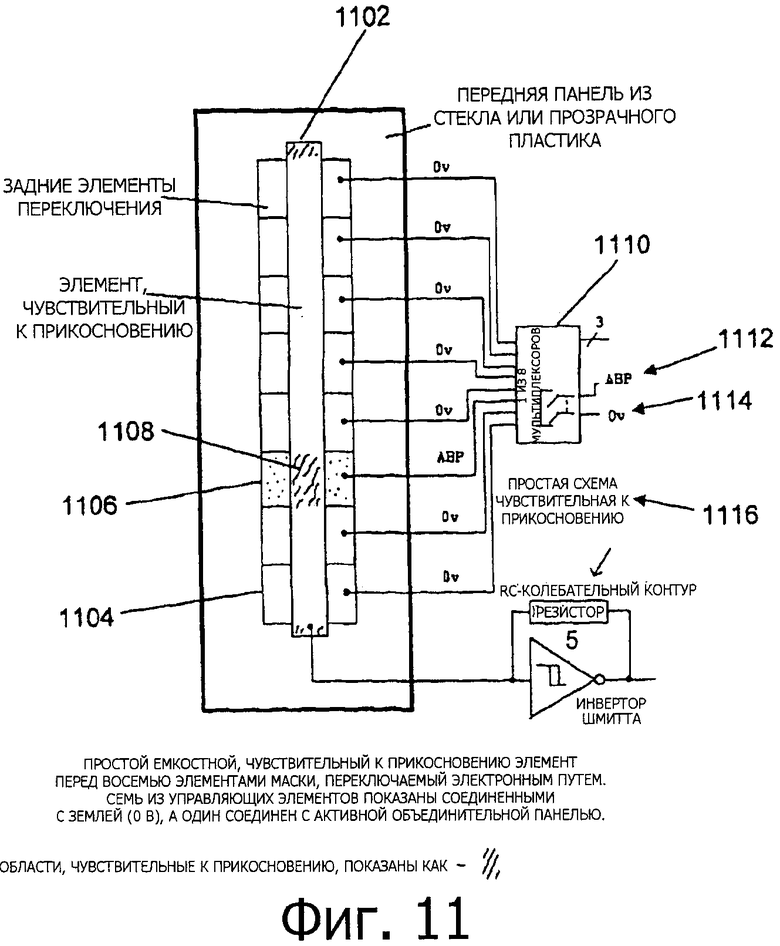
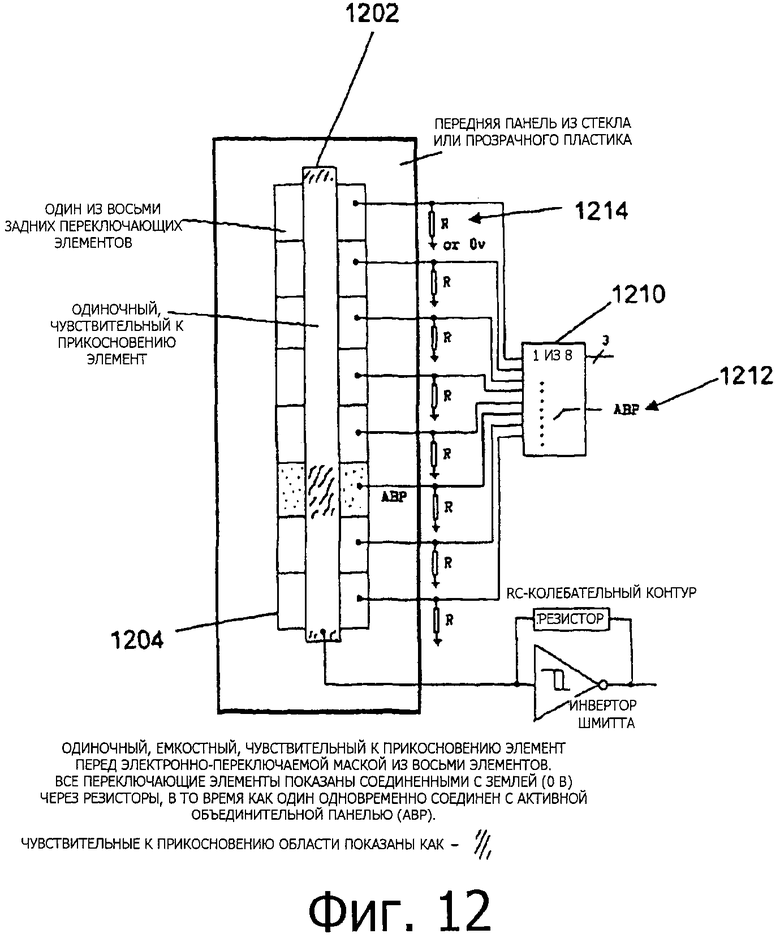
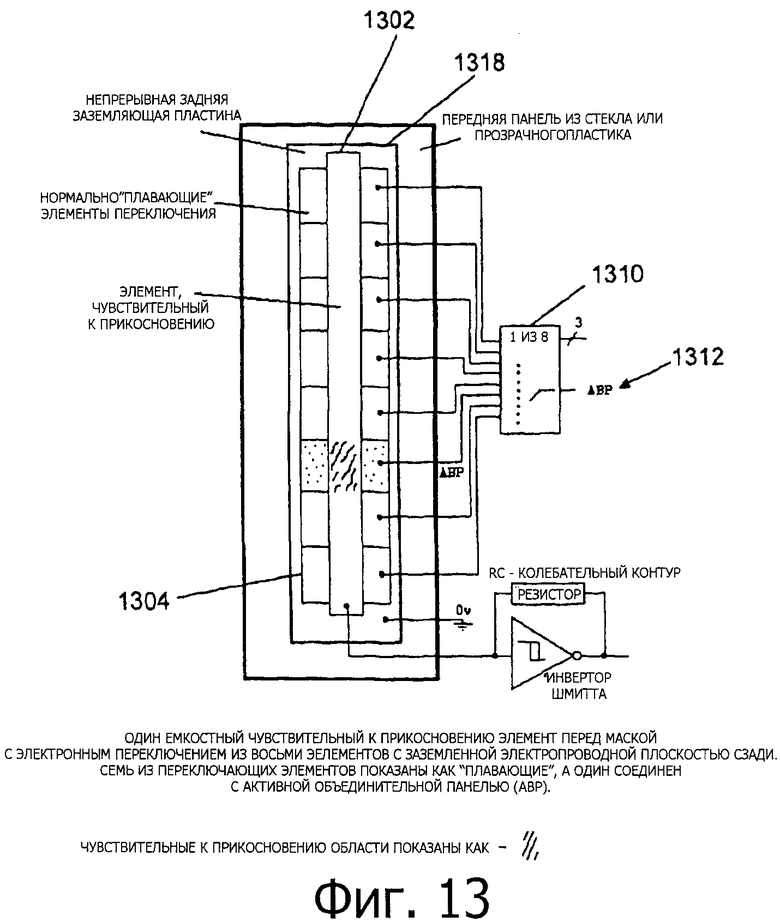
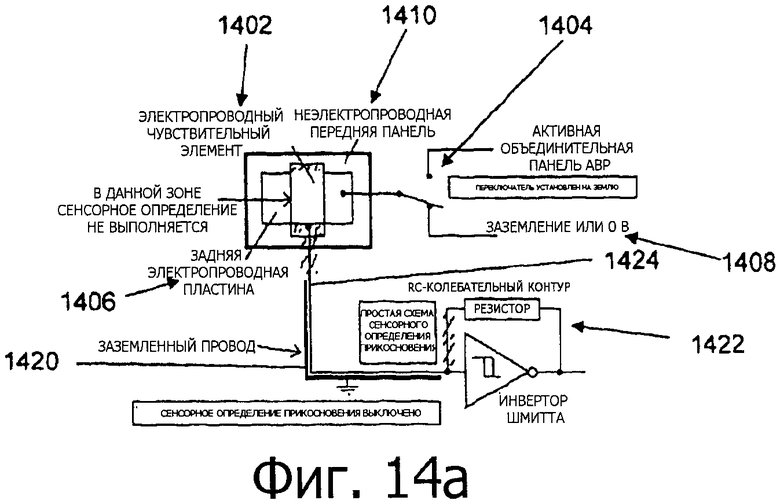
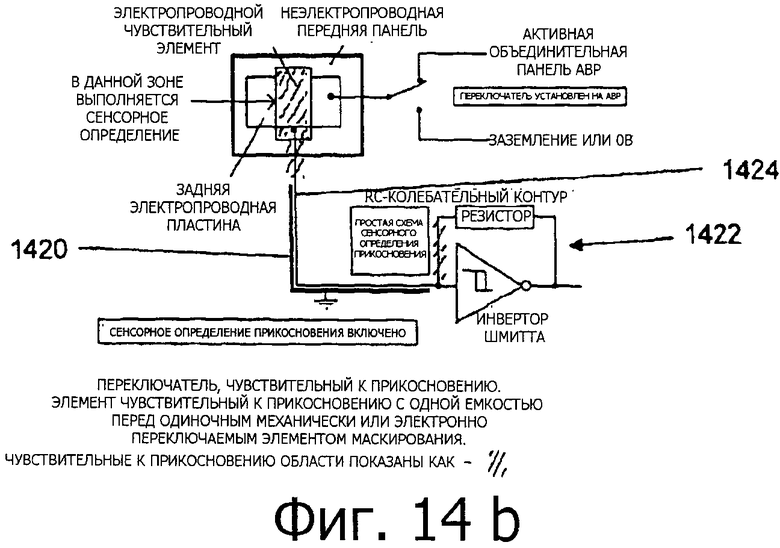
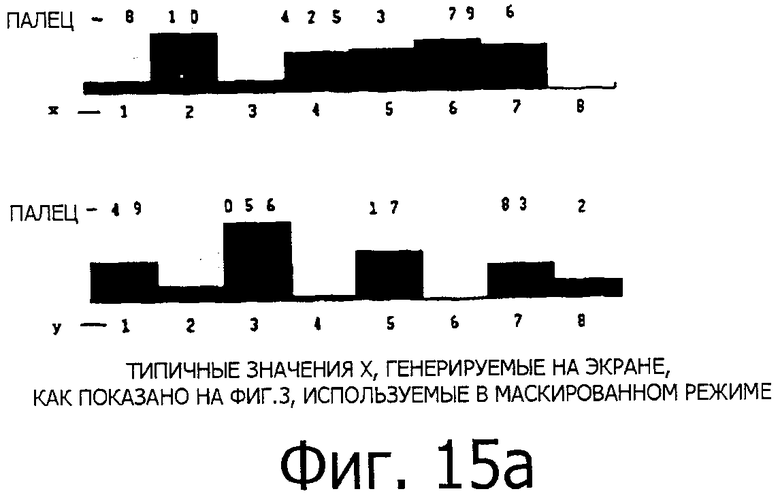
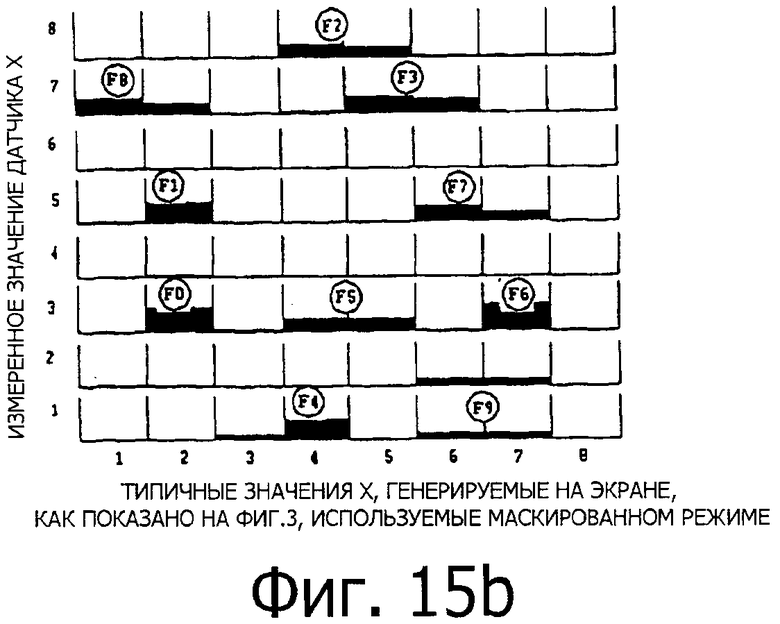
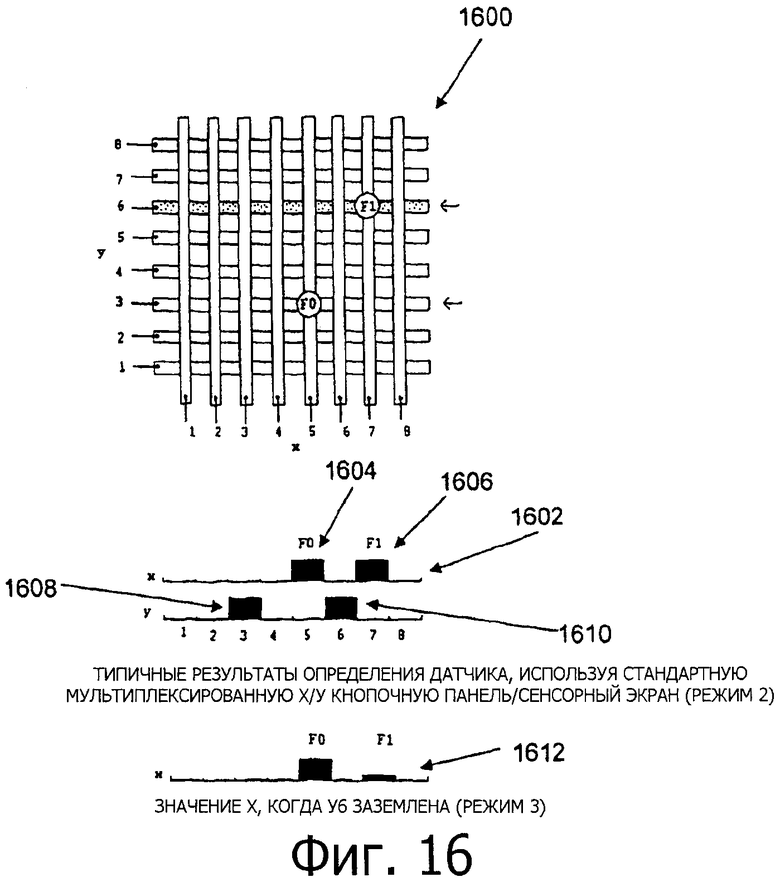
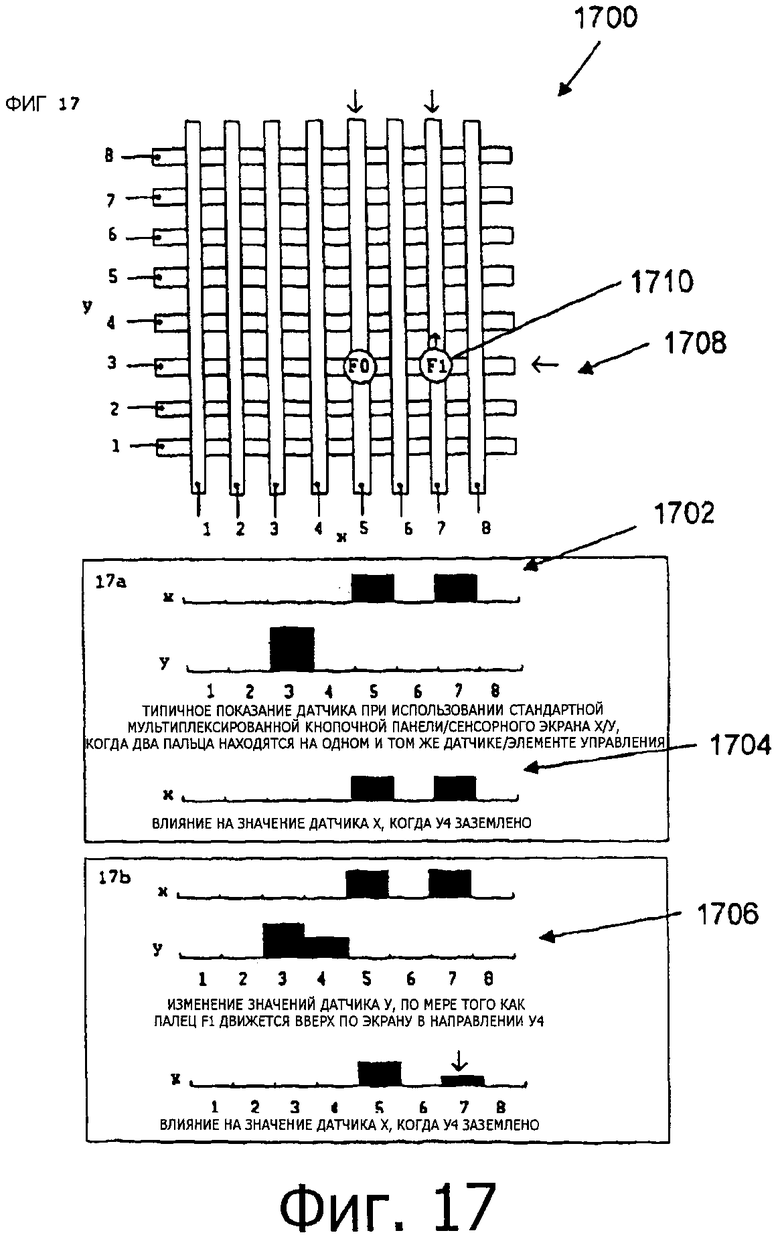
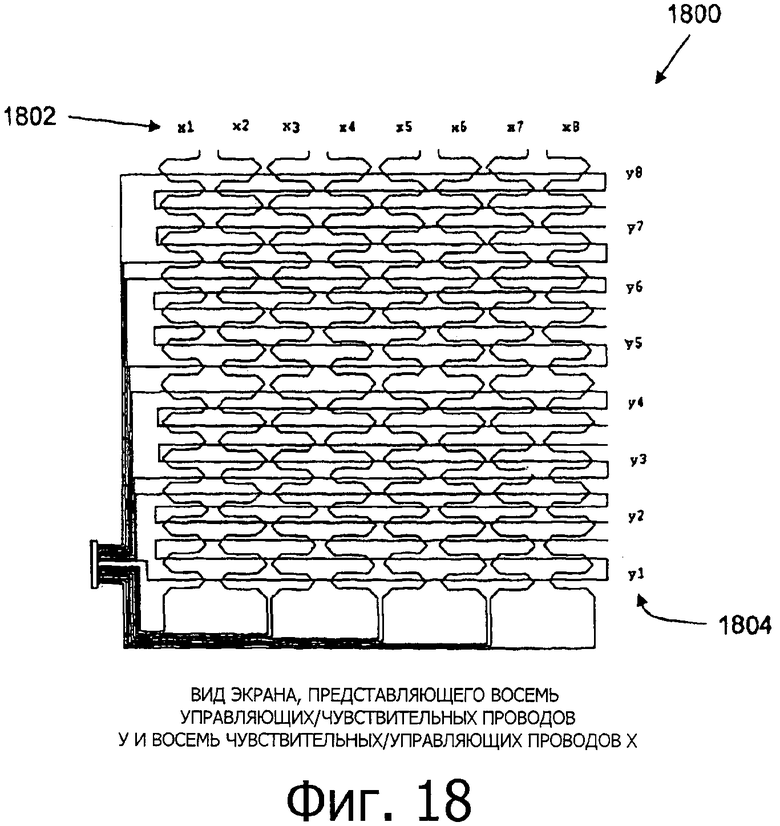
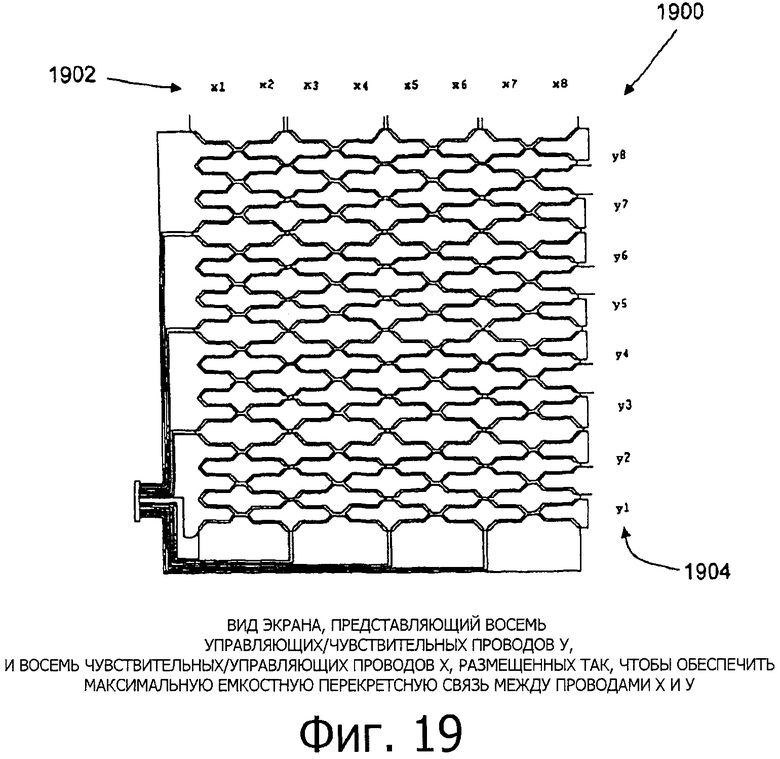
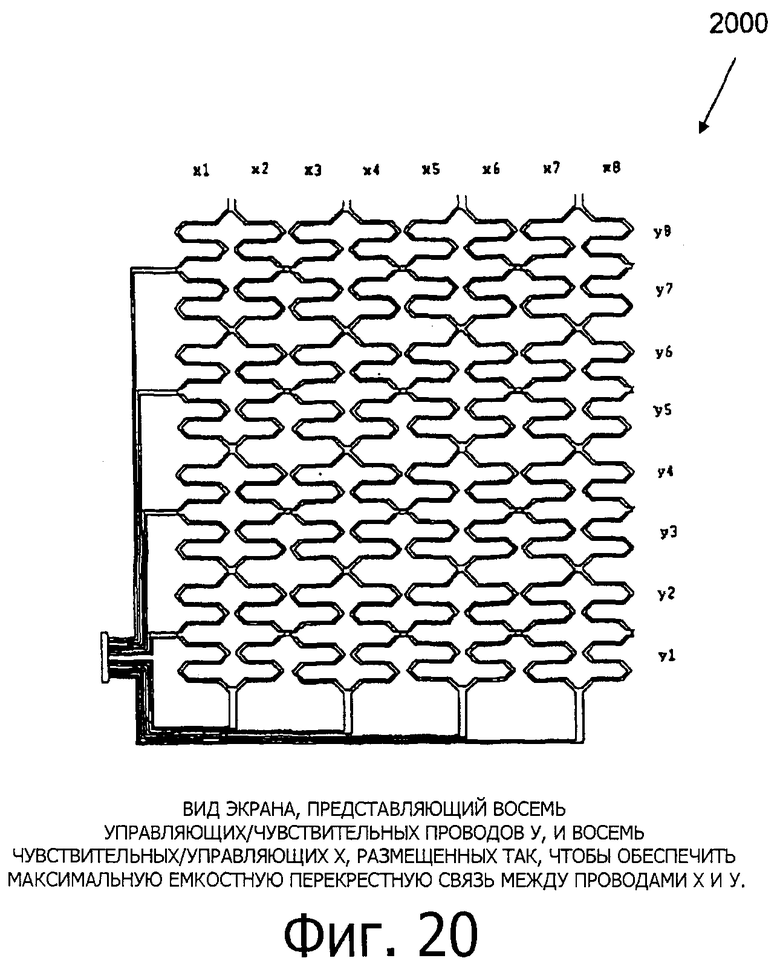
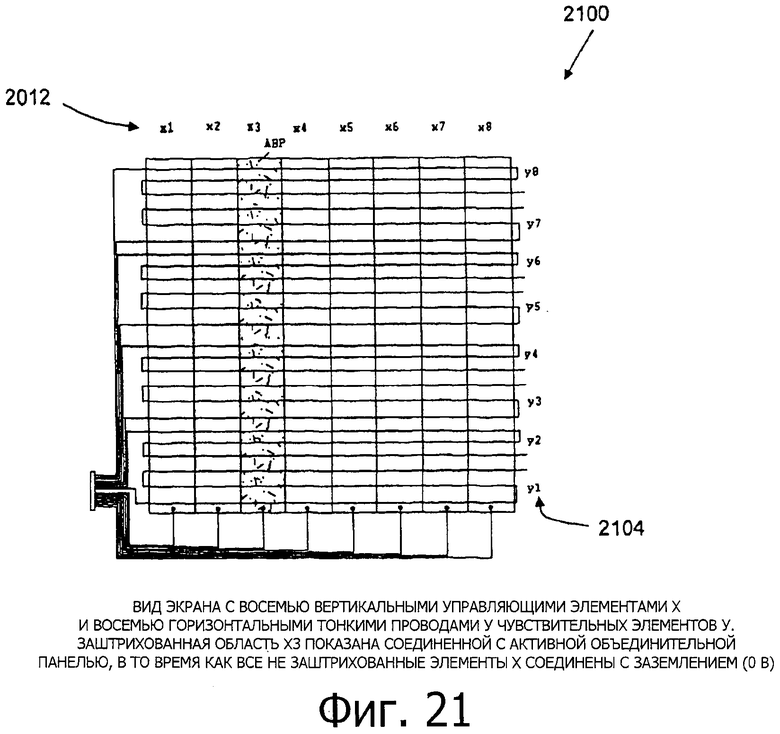
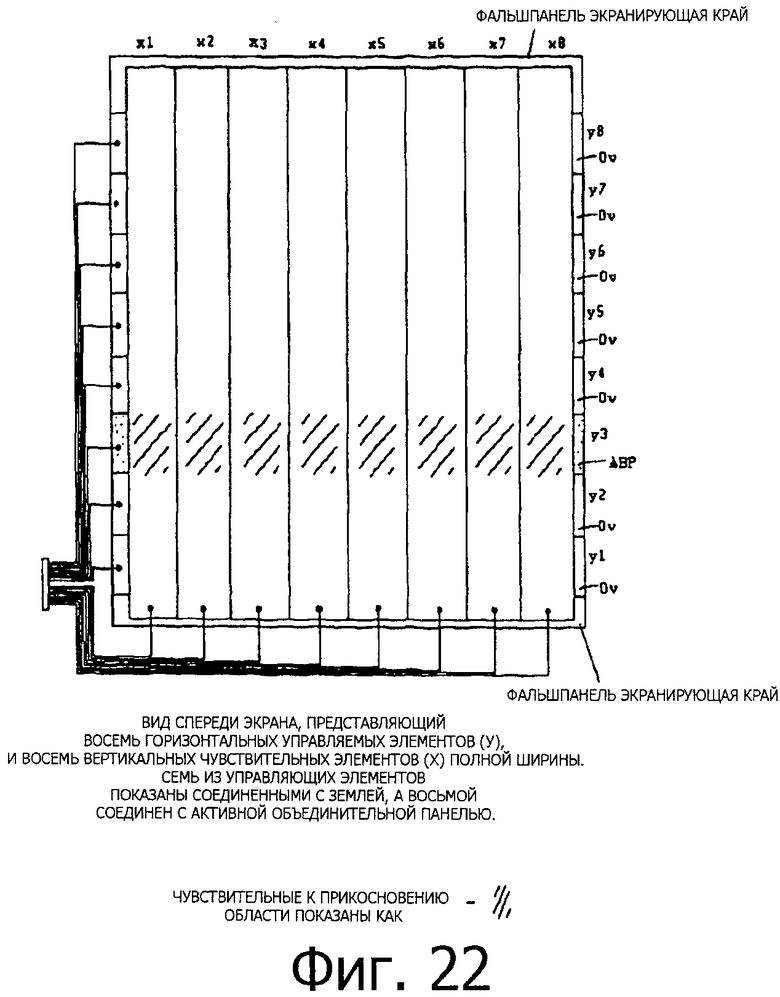
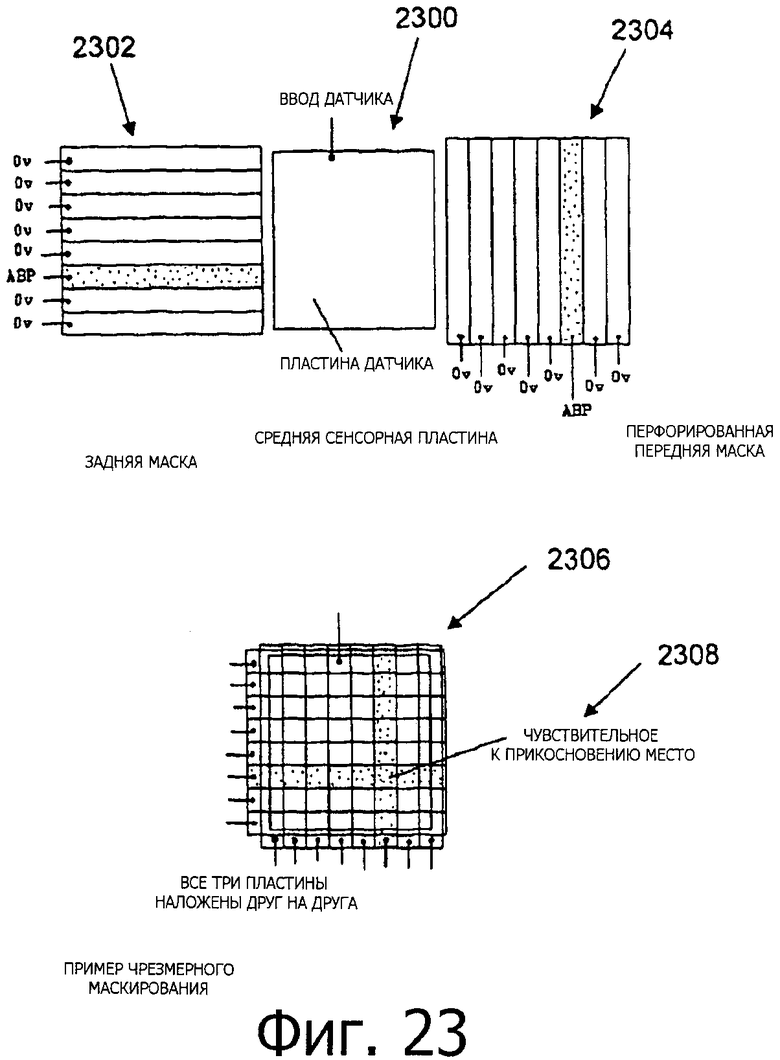
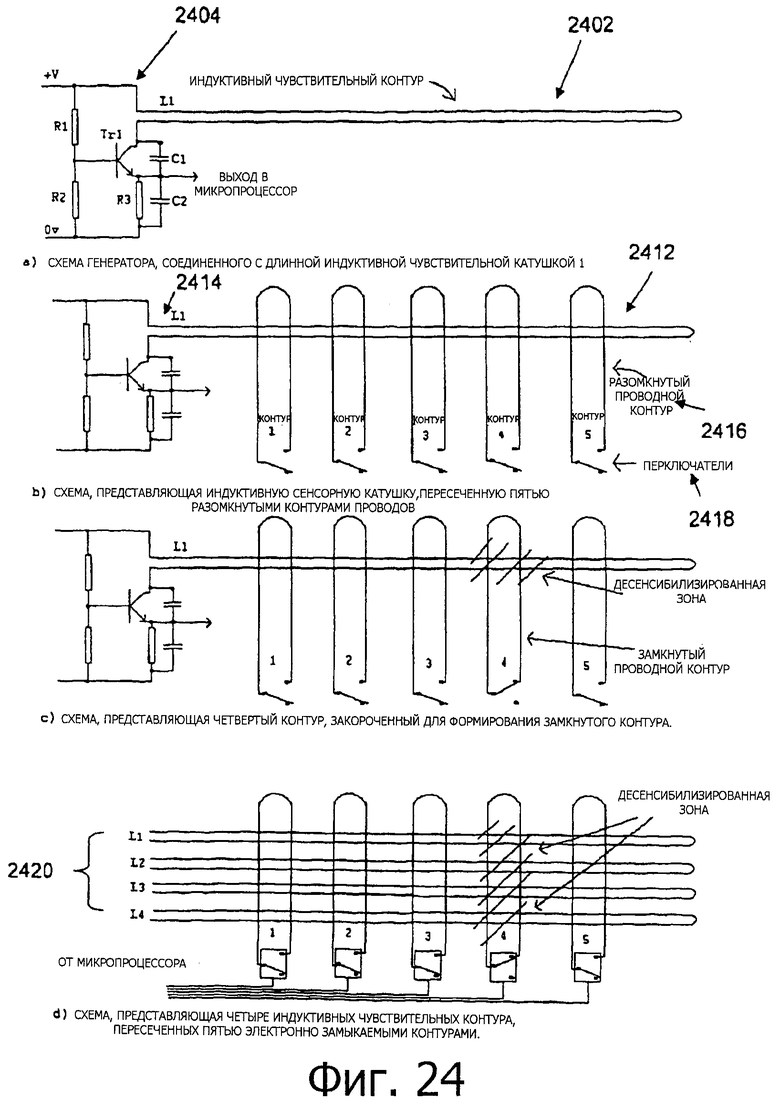
Изобретение относится к области датчиков прикосновения, которые могут распознавать множество одновременных вводов/прикосновений пользователя. Техническим результатом является обеспечение возможности однозначного определения местоположения нажатий пальцами. Датчик прикосновения содержит один или более чувствительных элементов (202) и один или более управляемых элементов (204); при этом область одного или более управляемых элементов (204) находится вблизи области одного или более чувствительных элементов (202) для обеспечения чувствительной области одного или более чувствительных элементов (202), причем один или более управляемых элементов (204) выполнены с возможностью управления ими так, что чувствительная область либо сенсибилизируется, либо десенсибилизируется при приближении пальца (206, 208); и указанная чувствительная область выполнена с возможностью ее десенсибилизации для определения положения приближения одного или более пальцев (206, 208). 2 н. и 15 з.п. ф-лы, 27 ил.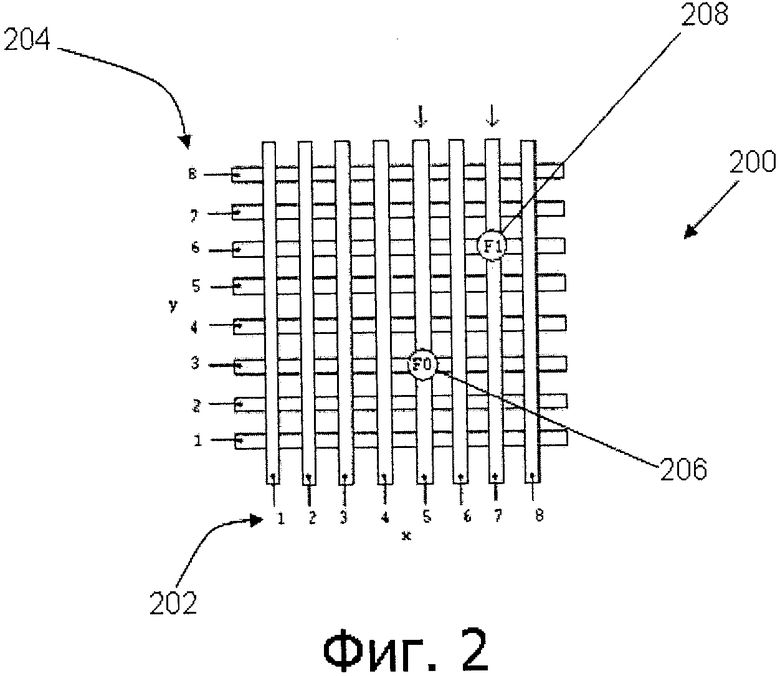
1. Датчик прикосновения, содержащий:
один или более чувствительных элементов (202) и один или более управляемых элементов (204);
при этом область одного или более управляемых элементов (204) находится вблизи области одного или более чувствительных элементов (202) для обеспечения чувствительной области одного или более чувствительных элементов (202), причем один или более управляемых элементов (204) выполнены с возможностью управления ими так, что чувствительная область либо сенсибилизируется, либо десенсибилизируется при приближении пальца (206, 208); и
указанная чувствительная область выполнена с возможностью ее десенсибилизации для определения положения приближения одного или более пальцев (206, 208).
2. Датчик прикосновения по п.1, в котором указанная чувствительная область выполнена с возможностью ее десенсибилизации для различения приближения множества пальцев.
3. Датчик прикосновения по п.1 или 2, в котором один или более чувствительных элементов (202) выровнены в другом направлении относительно направления одного или более управляемых элементов (204) так, что один или более чувствительных элементов (202) и один или более управляемых элементов (204) пересекаются для обеспечения чувствительной области, или
по меньшей мере часть из одного или более чувствительных элементов выровнены по существу в том же направлении, что и по меньшей мере часть из одного или более управляемых элементов, и расположены вблизи указанной части из одного или более управляемых элементов для обеспечения чувствительной области.
4. Датчик прикосновения по п.1, характеризующийся тем, что выполнен с возможностью соединения одного или более управляемых элементов с заземлением для десенсибилизации чувствительной области.
5. Датчик прикосновения по любому из пп.1, 2 или 4, характеризующийся тем, что выполнен с возможностью оставлять один или более управляемых элементов электрически плавающими для сенсибилизации чувствительной области.
6. Датчик прикосновения по п.1 или 2, характеризующийся тем, что выполнен с возможностью соединять один или более управляемых элементов с сигналом активной объединительной панели для сенсибилизации чувствительной области.
7. Датчик прикосновения по п.5, дополнительно содержащий переключатель, выполненный с возможностью соединять один или более управляемых элементов с заземлением для десенсибилизации чувствительной области или оставлять один или более управляемых элементов электрически плавающими для сенсибилизации чувствительной области.
8. Датчик прикосновения по п.6, дополнительно содержащий переключатель, выполненный с возможностью соединять один или более управляемых элементов с заземлением для десенсибилизации чувствительной области или соединять один или более управляемых элементов с сигналом активной объединительной панели для сенсибилизации чувствительных областей.
9. Датчик прикосновения по п.7 или 8, содержащий переключатель для каждого управляемого элемента.
10. Датчик прикосновения по любому из пп.4, 7 или 8, содержащий множество управляемых элементов и дополнительно содержащий контроллер, выполненный с возможностью периодического управления множеством управляемых элементов так, что каждый управляемый элемент поочередно сенсибилизирует или десенсибилизирует соответствующие чувствительные области.
11. Датчик прикосновения по п.7 или 8, дополнительно содержащий контроллер, выполненный с возможностью оперировать переключателем или переключателями в соответствии с информацией, принимаемой от одного или более чувствительных элементов, и дополнительно определять, какой из управляемых элементов подлежит управлению для различения между множеством пальцев, представленных ответными сигналами от одного или более чувствительных элементов,
при этом контроллер дополнительно выполнен с возможностью управлять управляемыми элементами для десенсибилизации ранее сенсибилизированной соответствующей чувствительной области, соответствующей местоположению одного из множества пальцев.
12. Датчик прикосновения по п.11, в котором контроллер выполнен с возможностью управлять управляемыми элементами для сенсибилизации всех чувствительных элементов, при этом контроллер дополнительно выполнен с возможностью многократно:
принимать информацию от чувствительных элементов; и
в ответ на информацию, принимаемую от чувствительных элементов, управлять управляемыми элементами для десенсибилизации соответствующих чувствительных областей, пока не станут различимыми множество пальцев.
13. Датчик прикосновения по п.1 или 2, в котором один или более чувствительных элементов выполнены как управляемые элементы и/или один или более управляемых элементов выполнены как чувствительные элементы,
при этом дополнительно все чувствительные элементы также выполнены как управляемые элементы, а контроллер выполнен с возможностью управлять управляемыми элементами так, что одна чувствительная область между двумя управляемыми элементами выполнена сенсорной.
14. Датчик прикосновения по п.1 или 2, в котором чувствительные элементы выполнены с возможностью определять палец, используя проецируемую емкость.
15. Датчик прикосновения по п.1 или 2, содержащий провод (1424), соединенный с одним или более чувствительными элементами (1402), и экран (1420), предусмотренный вблизи провода (1424) так, чтобы провод (1424) был не чувствителен к прикосновению,
при этом экран дополнительно представляет собой заземленный провод.
16. Датчик прикосновения по п.1 или 2, содержащий контроллер, содержащий первый набор из одного или более элементов и второй набор из одного или более элементов, причем и первый набор, и второй набор элементов выполнены с возможностью их работы в качестве как чувствительных, так и как управляемых элементов,
при этом контроллер выполнен с возможностью определения предварительного местоположения одного или более пальцев, используя первый набор элементов в качестве чувствительных элементов, а второй набор элементов в качестве управляемых элементов, и определения вторичного местоположения одного или более пальцев, используя первый набор элементов в качестве управляемых элементов, а второй набор элементов в качестве чувствительных элементов, и
контроллер дополнительно выполнен с возможностью определять составное местоположение одного или более пальцев в соответствии с предварительным местоположением и вторичным местоположением.
17. Способ работы датчика прикосновения, характеризующегося тем, что содержит один или более чувствительных элементов и один или более управляемых элементов, причем область одного или более управляемых элементов находится вблизи области одного или более чувствительных элементов для обеспечения чувствительной области одного или более чувствительных элементов, при этом способ содержит этапы, на которых:
управляют одним или более управляемыми элементами так, что чувствительная область либо сенсибилизируется, либо десенсибилизируется при приближении пальца,
десенсибилизируют чувствительную область для определения положения приближения одного или более пальцев.
| US 5844506 A, 01.12.1998 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| РУЛЕВОЕ УСТРОЙСТВО | 1993 |
|
RU2071434C1 |
| СЕНСОРНАЯ ПАНЕЛЬ ДЛЯ ВВОДА ИНФОРМАЦИИ | 1992 |
|
RU2029353C1 |
| RU 2006116510 A, 27.11.2007 | |||

