Изобретение относится к области производства трикотажных полотен и может быть использовано для автоматизации процесса вязания на спицах.
При петлеобразовании трикотажного полотна с помощью вязальной машины существует необходимость первоначального набора первого ряда петель. В традиционных вязальных машинах петлеобразование первого ряда осуществляют вручную (см., например, заявку на получение патента РФ №93025202, опубликована 20.08.1995 г., МПК D04B 7/08, /1/). Недостатком такой технологии является ее высокая трудоемкость.
Из уровня техники известны способы набора петель, в которых формирование как первого, так и последующих рядов осуществляют автоматически. В частности, известен робот для вязания (см. статью Westgarth М. «Machynlleth Mini Maker Faire to include knitting robot» опубликована 23.08.2013 г. на сайте 13/08/23/machynlleth-mini-maker-faire-to-include-knitting-robot/, /2/), включающий основание с направляющими, а также манипулятор с захватом для вязального инструмента. Для набора петель нить размещают между направляющими, при этом осуществляют поступательные перемещения вязального инструмента с захватом нити и формированием петель согласно заданному алгоритму. Недостатком подобных устройств является их низкая универсальность, т.к. они не обеспечивают возможности вязания трикотажных полотен сложных по форме и по конфигурации петель.
Задачей заявленного изобретения является создание универсального способа и устройства для вязания, позволяющих осуществлять автоматизированный набор петель по крайней мере первого ряда трикотажного полотна.
Технический результат заключается в обеспечении возможности автоматизации процесса набора петель первого ряда, увеличении скорости петлеобразования, повышении универсальности и расширении технологических возможностей способа и устройства.
Указанный технический результат достигается в способе набора петель трикотажного полотна за счет того, что он включает размещение нити между по меньшей мере двумя направляющими элементами и осуществление поступательных и вращательных перемещений по меньшей мере одного вязального инструмента посредством управляемого манипулятора, имеющего три поступательные степени свободы и по меньшей мере две вращательные степени свободы относительно осей, не совпадающих с осью вязального инструмента, с обеспечением захвата нити вязальным инструментом и формирования петель согласно алгоритму петлеобразования.
Кроме того, указанный технический результат достигается в частных вариантах реализации способа за счет того, что:
- в качестве вязального инструмента используют спицу,
- в качестве направляющих элементов используют ролики, в пазы которых укладывают нить,
- нить размещают между тремя направляющими элементами и по меньшей мере двумя пропускными кольцами с образованием четырехугольника,
- в процессе петлеобразования по меньшей мере однократно осуществляют поступательное и/или вращательное перемещение вязального инструмента в плоскости, параллельной и/или перпендикулярной плоскости прямоугольника, образованного нитью,
- в процессе петлеобразования по меньшей мере однократно осуществляют съем нити с по меньшей мере одного направляющего элемента и/или укладку нити на по меньшей мере один направляющий элемент,
- в процессе петлеобразования по меньшей мере однократно осуществляют натяжение нити для затягивания формируемой петли,
- в процессе петлеобразования осуществляют формирование по крайней мере первого ряда петель.
Указанный технический результат достигается в устройстве для набора петель трикотажного полотна, содержащем основание, на котором установлены по меньшей мере два направляющих элемента для укладывания на них нити, механизм натяжения нити, по меньшей мере один пространственный манипулятор с захватом для вязального инструмента, имеющий три поступательные степени свободы и по меньшей мере две вращательные степени свободы относительно осей, не совпадающих с осью вязального инструмента, и систему управления манипулятором.
Кроме того, указанный технический результат достигается в частных вариантах реализации устройства за счет того, что:
- в качестве вязального инструмента использована спица,
- в качестве направляющих элементов использованы подвижные ролики с пазами,
- манипулятор снабжен тремя приводами поступательного перемещения и по меньшей мере двумя приводами вращательного перемещения, при этом приводы связаны с системой управления манипулятором,
- механизм натяжения нити включает в себя по меньшей мере одну приводную катушку, соединенную с электроприводом, по меньшей мере два пропускных кольца, и регулируемые грузы, обеспечивающие необходимый уровень натяжения нити при петлеобразовании,
- устройство содержит три направляющих элемента и по меньшей мере два пропускных кольца, размещенные на основании с образованием четырехугольника.
В отличие от робота для вязания согласно /2/, выбранного в качестве ближайшего аналога, в заявленных способе и устройстве используют по меньшей мере один управляемый манипулятор для перемещения вязального инструмента, имеющий по меньшей мере пять степеней свободы: три поступательные и по крайней мере две вращательные степени свободы. При этом указанные оси вращения инструмента не совпадают с его собственной осью. Данное отличие позволяет осуществлять формирование петель практически любой конфигурации. При необходимости получения сложных конфигураций и/или форм получаемого трикотажного изделия используют несколько манипуляторов.
Заявленное изобретение поясняется представленными чертежами, на которых приведены возможные варианты осуществления настоящего изобретения.
На фиг.1 показана общая схема заявленного устройства.
На фиг.2 показан пример схемы реализации заявленного способа.
Заявленное устройство (см. фиг.1) содержит основание (1) с установленными на нем по меньшей мере двумя, предпочтительно - тремя направляющими элементами (2, 3, 4), на которые укладывают нить (5) (показана пунктирной линией), механизм (6) натяжения нити, по меньшей мере один пространственный манипулятор (7) с захватом для вязального инструмента (8) и систему управления (9) манипулятором.
Манипулятор (7) имеет три поступательные степени свободы, а также по меньшей мере две вращательные степени свободы. При этом вращение осуществляется относительно осей, не совпадающих с осью вязального инструмента. В предпочтительном варианте манипулятор (7) имеет три вращательные степени свободы. Для осуществления указанных вращательных и поступательных перемещений манипулятор (7) включает три привода (10, 11, 12) линейного перемещения и по меньшей мере два, предпочтительно - три привода (13, 14, 15) вращательного перемещения, оси вращения которых не совпадают с осью вязального инструмента (8). Все приводы (10, 11, 12, 13, 14, 15) связаны с системой управления (9) для обеспечения пространственной ориентации и перемещения вязального инструмента (8) по заданному алгоритму.
Механизм натяжения (6) включает в себя по меньшей мере одну катушку (16), приводимую в движение электроприводом (не показан) и необходимую для затягивания узлов петли, а также по меньшей мере одно входное и одно выходное пропускные кольца (17) и регулируемый груз (18), обеспечивающий необходимый уровень натяжения нити (5). Все электроприводы связаны с системой управления (9).
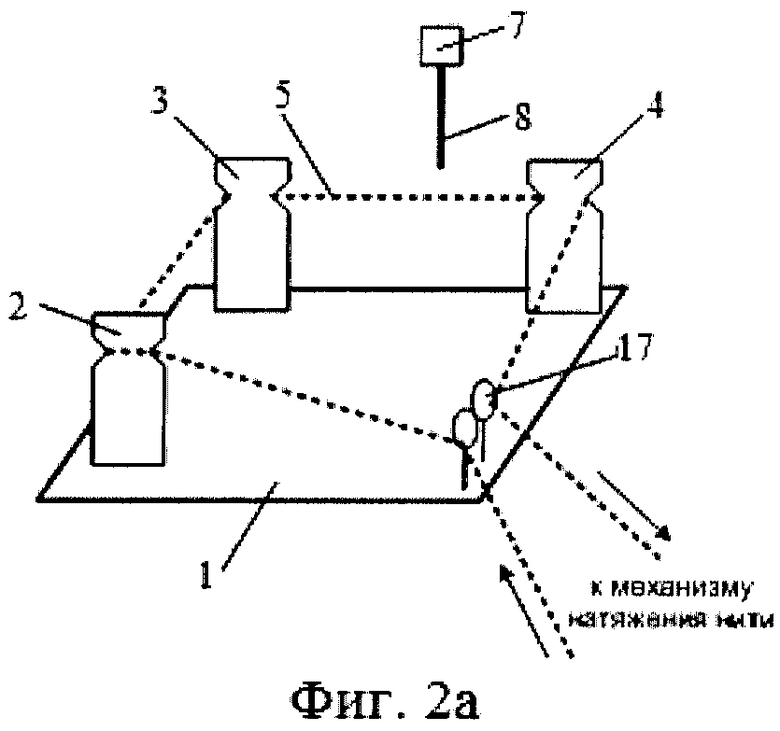
В качестве направляющих элементов (2, 3, 4) могут быть использованы подвижные ролики с пазами для укладывания в них нити, как показано, например, на фиг.2а.
В предпочтительном варианте реализации изобретения направляющие ролики (2, 3, 4) и пропускные кольца (17) расположены на основании (1), так что натянутая между ними нить (5) формирует четырехугольник (см. фиг.2а).
В качестве вязального инструмента (8) может быть использована вязальная спица или любой другой подходящий для вязания инструмент, например крючок.
Заявленный способ в общем случае реализуется следующим образом.
Нить (5) укладывают на направляющие ролики (2, 3, 4) в начальное положение. После включения устройства вязальный инструмент (8), приводимый в движение пространственным манипулятором (7), захватывает нить (5) с наружной стороны устройства. Затем вязальный инструмент (8) согласно алгоритму петлеобразования совершает ряд пространственных поступательных и вращательных перемещений в плоскости, параллельной или перпендикулярной плоскости четырехугольника, образованного нитью (5), задаваемых системой управления (9). Далее механизм (6) натяжения осуществляет натягивание нити (5) для окончательного формирования узла. После этого манипулятор осуществляет перемещение для установки нити (5) в исходное положение. Указанный цикл повторяется n раз до формирования по крайней мере первого ряда петель, где n - заданное число петель первого ряда трикотажного полотна. Для формирования последующих рядов могут быть использованы один или несколько дополнительных манипуляторов (7) с вязальными инструментами (8). В частности было установлено, что при использовании четырех манипуляторов (7) и соответственно четырех вязальных инструментов заявленное устройство может обеспечить формирование трикотажного изделия практически любой формы из трикотажного полотна с любой конфигурацией петель.
Пример реализации способа.
В начальный момент времени, приведенный на фиг.2а, нить (5) укладывают в пазы подвижных роликов (2, 3, 4), закрепленных на основании (1), при этом натяжение нити (5), проходящей через пропускные кольца (17), обеспечивается механизмом (6) натяжения, включающим регулируемый груз (18). Спица (8), закрепленная в захвате пространственного манипулятора (7), расположена снаружи четырехугольника, образованного натянутой нитью (5), перпендикулярно основанию 1, т.е. конец спицы (8) направлен вертикально вниз.
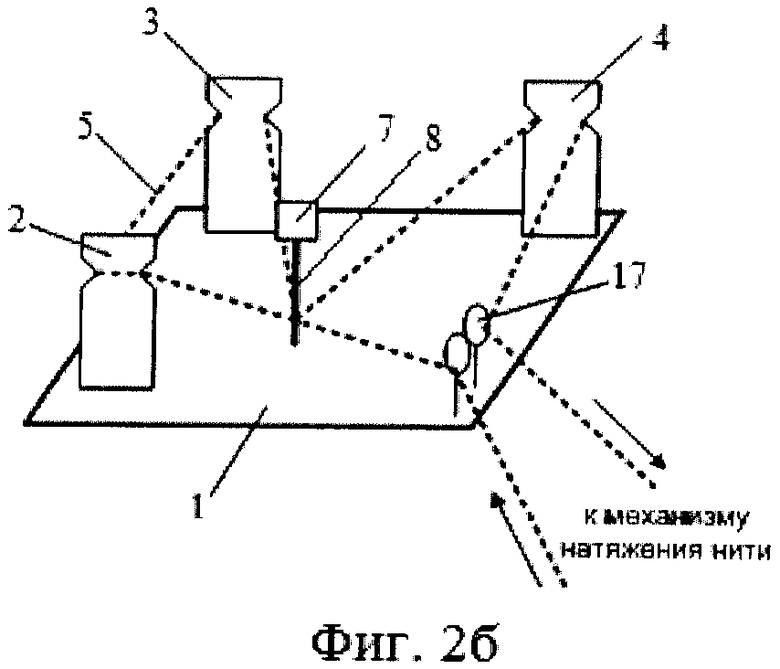
Далее, как показано на фиг.2б, спица (8) совершает поступательное движение в горизонтальной плоскости, осуществляя захват участка нити (5), натянутого между роликами (3) и (4). После перемещения на заданную величину спица (8) совершает поступательное движение в вертикальной плоскости.
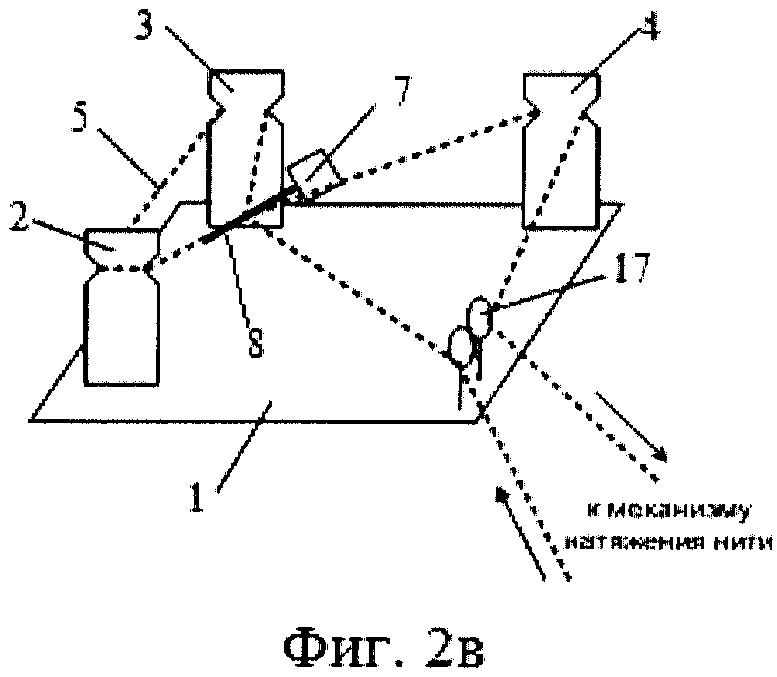
Затем спица (8) осуществляет захват нити, натянутой между роликом (2) и пропускным кольцом (17), и перемещается в горизонтальной плоскости на фиксированную величину. После этого спица (8) совершает вращательное движение против часовой стрелки, если смотреть с конца спицы (8) (фиг.2в).
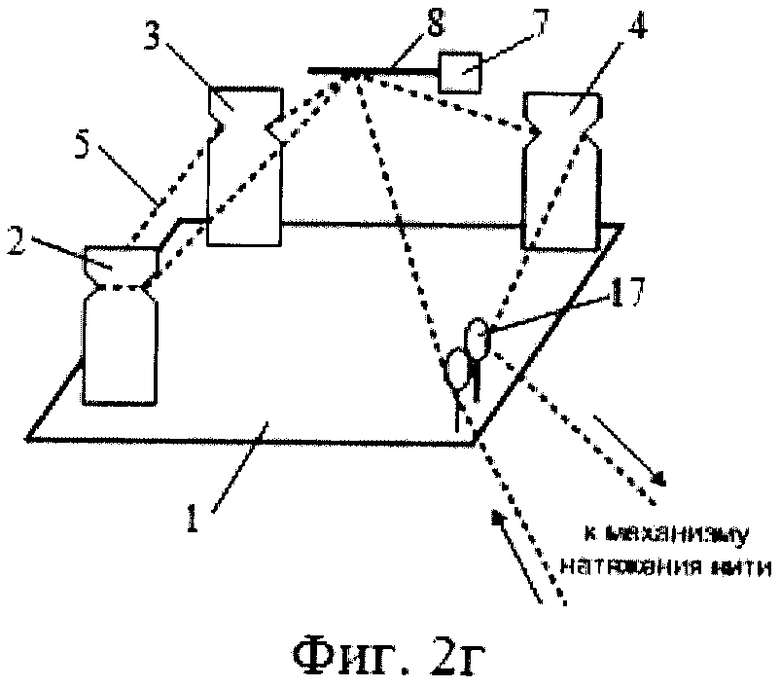
Далее спица (8) перемещается в горизонтальной плоскости на величину, соответствующую начальному положению, и затем - в вертикальной плоскости (вертикально вверх). При этом ось спицы (8) направлена горизонтально (фиг.2г).
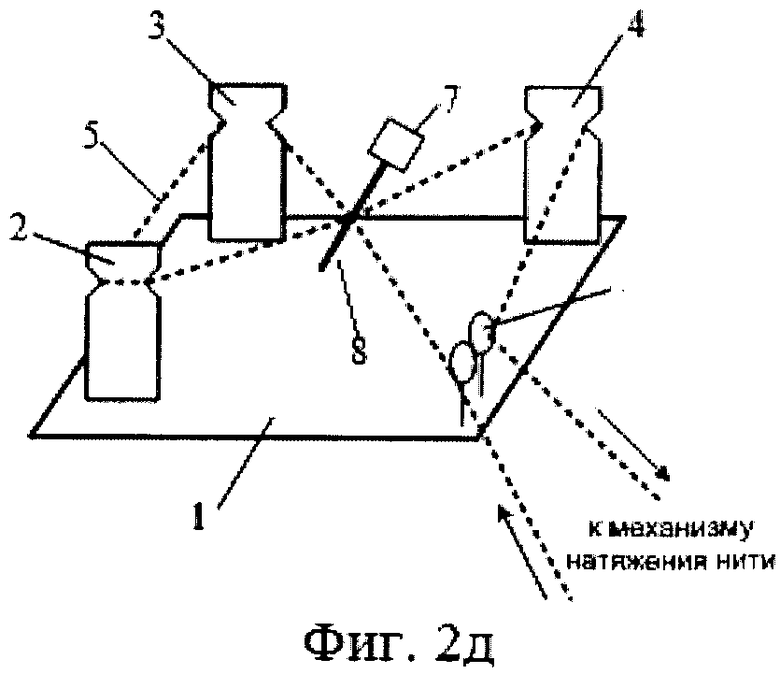
После этого спица (8) поворачивается в исходное вертикальное состояние, смещаясь внутрь прямоугольника, образованного натянутой нитью (фиг.2д).
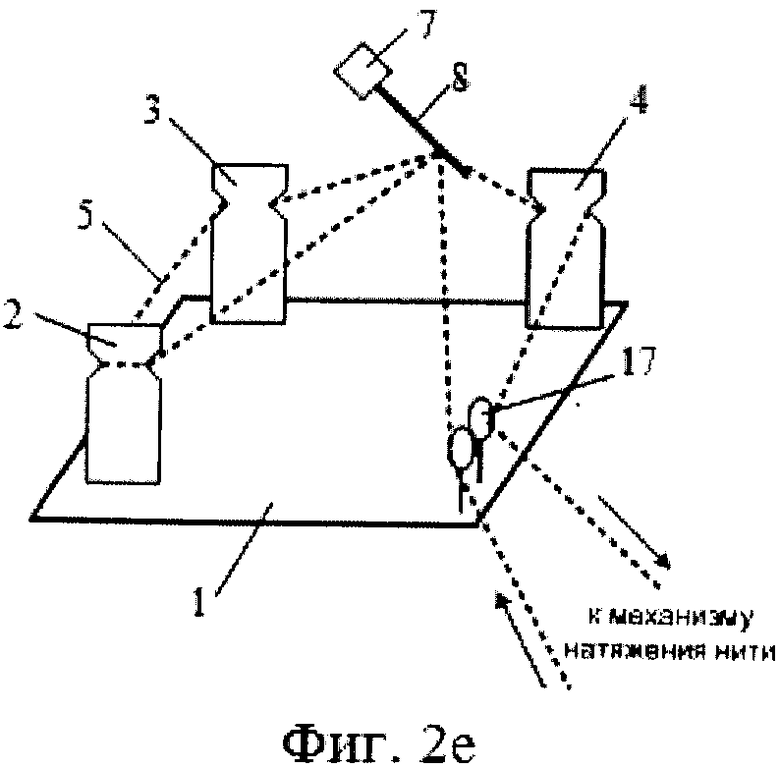
Затем спица (8) осуществляет поворот в вертикальной плоскости по часовой стрелке и перемещается в исходное положение (фиг.2е).
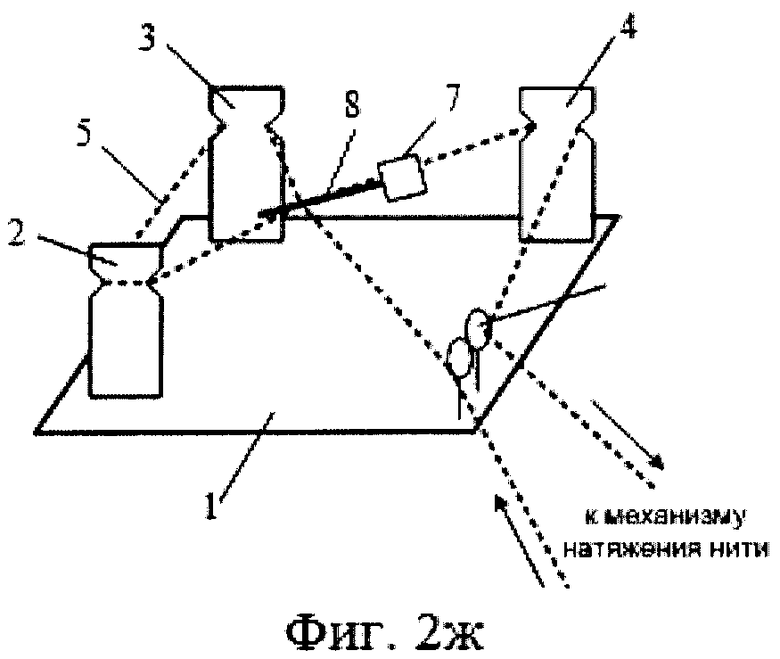
После этого, осуществив поворот в вертикальной плоскости против часовой стрелки, спица (8) смещается внутрь четырехугольника, образованного натянутой нитью, и осуществляет поворот в противоположную сторону (фиг.2ж).
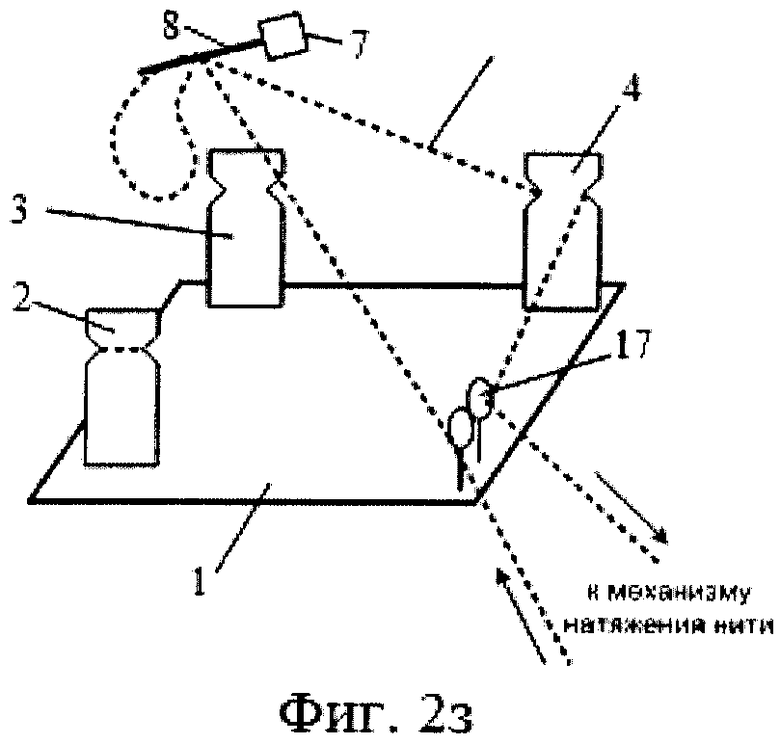
Затем спица (8) смещается вертикально вверх, снимая нить с роликов (2, 3), а натяжное устройство затягивает получившийся узел на спице (8) (фиг.2з).
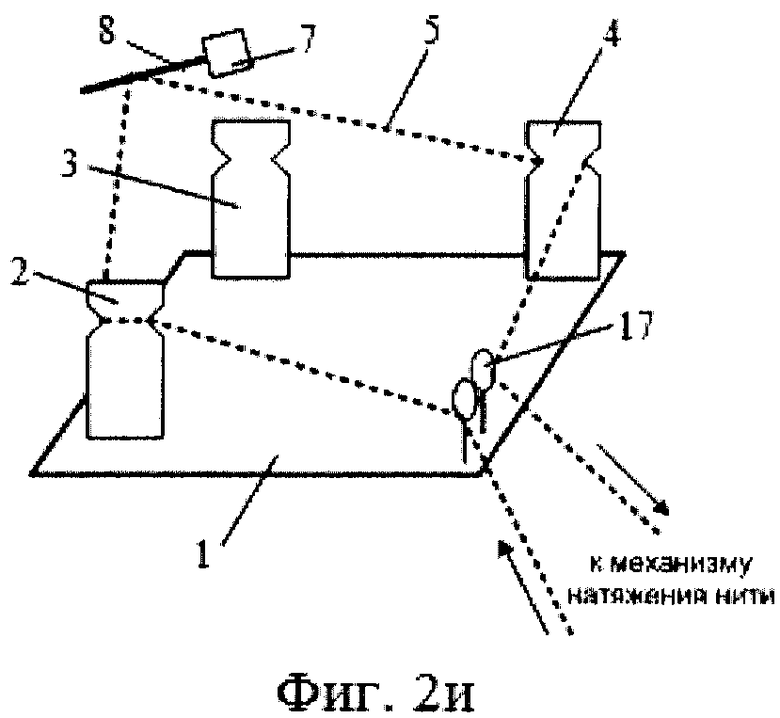
Далее спица (8) совершает пространственное движение, обеспечивающее укладку нити на ролики (2, 3) (фиг.2и).
И далее цикл петлеобразования повторяется, исключая первое движение захвата нити (5), поскольку она уже зафиксирована на спице (8) сформированным узлом. В процессе петлеобразования необходимое натяжение нити (5) постоянно обеспечивается механизмом натяжения нити. Применение предложенного способа позволяет автоматизировать процесс набора петель с самого первого узла.
Данный алгоритм приведен в заявке лишь в качестве примера. Очевидно, что заявленные способ и устройство могут обеспечить формирование петель полотна согласно любому наперед заданному алгоритму петлеобразования.
Использование изобретения позволяет сократить время изготовления трикотажного изделия за счет замены ручного труда и повышения эффективности набора петель, особенно петель первого ряда трикотажного полотна, посредством автоматизации процесса набора петель.
Следует отметить, что заявленные способ и устройство не ограничены частными примерами их исполнения, приведенными в описании. Возможны также другие варианты их реализации в объеме предложенной совокупности существенных признаков.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК НАПРАВЛЯЮЩИХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ПЕТЛЕОБРАЗОВАНИЯ ТРИКОТАЖНОГО ПОЛОТНА, ИСПОЛЬЗУЮЩЕЕ УКАЗАННЫЙ БЛОК | 2015 |
|
RU2585571C1 |
| ОБЪЕМНЫЙ ТРИКОТАЖ | 2018 |
|
RU2689446C1 |
| СПОСОБ ПОПЕРЕЧНОГО ВЯЗАНИЯ ТРИКОТАЖА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2189409C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВЯЗАНОЙ ПЕРЧАТКИ И ВЯЗАНАЯ ПЕРЧАТКА | 2005 |
|
RU2377347C2 |
| ВЯЗАЛЬНЫЙ МЕХАНИЗМ ПЛОСКОВЯЗАЛЬНОЙ МАШИНЫ | 1988 |
|
RU2037581C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТРИКОТАЖНОГО ПОЛОТНА | 2009 |
|
RU2395634C1 |
| СПОСОБ РОМАНОВОЙ НАБОРА ПЕТЕЛЬ НАЧАЛА ТРИКОТАЖНОГО ПОЛОТНА РУЧНОГО ВЯЗАНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2140470C1 |
| СПОСОБ ВЯЗАНИЯ КОНТУРНЫХ ДЕТАЛЕЙ ИЗДЕЛИЙ И ПОЛОТНА НА ДВУХФОНТУРНЫХ ПЛОСКИХ И КРУГЛОВЯЗАЛЬНЫХ МАШИНАХ И ДВУХФОНТУРНАЯ ВЯЗАЛЬНАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2057828C1 |
| Двухфонтурная кругловязальная машина | 1981 |
|
SU958538A1 |
| ИНСТРУМЕНТ ДЛЯ РУЧНОГО ВЯЗАНИЯ | 2002 |
|
RU2207414C1 |
Изобретение относится к области производства трикотажных полотен и может быть использовано для автоматизации процесса вязания на спицах. Способ набора петель включает размещение нити (5) между по меньшей мере двумя направляющими элементами (2, 3, 4) и осуществление поступательных и вращательных перемещений по меньшей мере одного вязального инструмента (8) посредством управляемого манипулятора (7). Манипулятор имеет три поступательные степени свободы и по меньшей мере две вращательные степени свободы относительно осей, не совпадающих с осью вязального инструмента (8). При этом перемещения осуществляют с обеспечением захвата нити (5) вязальным инструментом (8) и формирования петель согласно алгоритму петлеобразования. Устройство для реализации способа содержит основание (1), на котором установлены по меньшей мере два направляющих элемента (2, 3, 4), механизм натяжения (6) нити (5), по меньшей мере один упомянутый пространственный манипулятор (7) с захватом для вязального инструмента (8), систему управления (9) манипулятором. Техническим результатом является обеспечение автоматизации процесса набора петель первого ряда, увеличение скорости петлеобразования, повышение универсальности и расширение технологических возможностей способа и устройства. 2 н. и 12 з.п. ф-лы, 10 ил.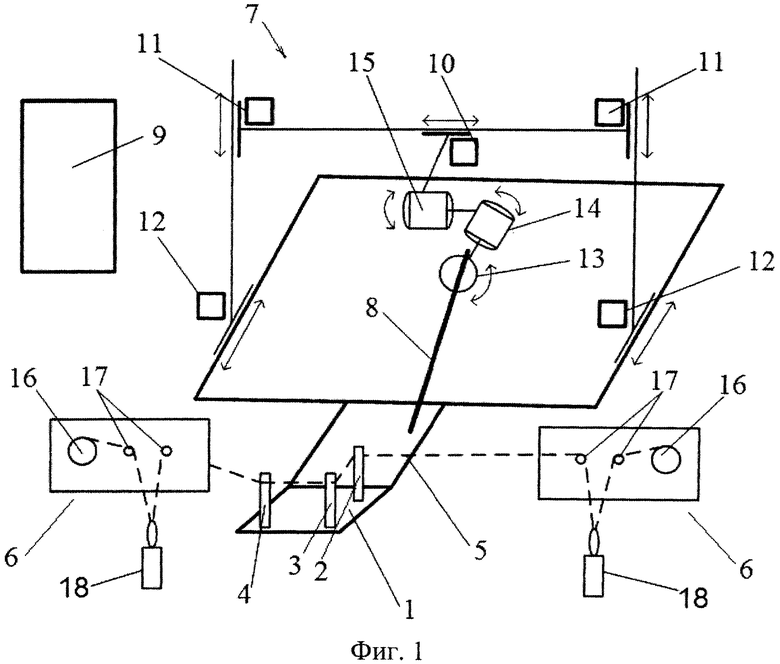
1. Способ набора петель трикотажного полотна, включающий:
размещение нити (5) между по меньшей мере двумя направляющими элементами (2, 3, 4) и
осуществление поступательных и вращательных перемещений по меньшей мере одного вязального инструмента (8) посредством управляемого манипулятора (7), имеющего три поступательные степени свободы и по меньшей мере две вращательные степени свободы относительно осей, не совпадающих с осью вязального инструмента (8), с обеспечением захвата нити (5) вязальным инструментом (8) и формирования петель согласно алгоритму петлеобразования.
2. Способ набора петель по п.1, в котором в качестве вязального инструмента (8) используют спицу.
3. Способ набора петель по п.1, в котором в качестве направляющих элементов (2, 3, 4) используют ролики, в пазы которых укладывают нить (5).
4. Способ набора петель по любому из пп.1-3, в котором нить (5) размещают между тремя направляющими элементами (2, 3, 4) и по меньшей мере двумя пропускными кольцами (17) с образованием четырехугольника.
5. Способ набора петель по п.4, в котором в процессе петлеобразования по меньшей мере однократно осуществляют поступательное и/или вращательное перемещение вязального инструмента (8) в плоскости, параллельной и/или перпендикулярной плоскости четырехугольника, образованного нитью (5).
6. Способ набора петель по п.4, в котором в процессе петлеобразования по меньшей мере однократно осуществляют съем нити (5) с по меньшей мере одного направляющего элемента (2, 3, 4) и/или укладку нити на по меньше мере один направляющий элемент (2, 3, 4).
7. Способ набора петель по п.4, в котором в процессе петлеобразования по меньшей мере однократно осуществляют натяжение нити (5) для затягивания формируемой петли.
8. Способ набора петель по п.4, в котором в процессе петлеобразования осуществляют формирование по крайней мере первого ряда петель.
9. Устройство для набора петель трикотажного полотна, содержащее:
основание (1), на котором установлены по меньшей мере два направляющих элемента (2, 3, 4) для укладывания на них нити (5),
механизм натяжения (6) нити (5),
по меньшей мере один пространственный манипулятор (7) с захватом для вязального инструмента (8), имеющий три поступательные степени свободы и по меньшей мере две вращательные степени свободы относительно осей, не совпадающих с осью вязального инструмента (8), и
систему управления (9) манипулятором для управления манипулятором (7).
10. Устройство для набора петель по п.9, в котором в качестве вязального инструмента (8) использована спица.
11. Устройство для набора петель по п.9, в котором в качестве направляющих элементов (2, 3, 4) использованы подвижные ролики с пазами.
12. Устройство для набора петель по любому из пп.9-11, в котором манипулятор (7) снабжен тремя приводами (10, 11, 12) поступательного перемещения и по меньшей мере двумя приводами (13, 14, 15) вращательного перемещения, при этом приводы (10, 11, 12, 13, 14, 15) связаны с системой управления (9) манипулятором.
13. Устройство для набора петель по любому из пп.9-11, в котором механизм натяжения (6) нити (5) включает по меньшей мере одну приводную катушку (16), соединенную с электроприводом, по меньшей мере два пропускных кольца (17) и регулируемые грузы (18), обеспечивающие необходимый уровень натяжения нити (5) при петлеобразовании.
14. Устройство для набора петель по любому из пп.9-11, содержащее три направляющих элемента (2, 3, 4) и по меньшей мере два пропускных кольца (17), размещенные на основании (1) с образованием четырехугольника.
| Волномер с двумя настройками для измерения малых разностей частот | 1954 |
|
SU115709A1 |
| US 20120048027 A1, 01.03.2012 | |||
| СПОСОБ РОМАНОВОЙ НАБОРА ПЕТЕЛЬ НАЧАЛА ТРИКОТАЖНОГО ПОЛОТНА РУЧНОГО ВЯЗАНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2140470C1 |
| CN 202440633 U, 19.09.2012 | |||
| Устройство для принудительной подачи нити кругловязальной машины | 1990 |
|
SU1735448A1 |

