Изобретение относится к средствам накопления мускульной энергии человека, хранения механической энергии, генерации электрической энергии, питания электрических систем и может быть использовано в качестве возобновляемых и/или мобильных многофункциональных источников электроэнергии для питания электрических устройств. Многофункциональность изобретения позволяет применять его в разных ситуациях: в условиях смены городских условий (с наличием электросети) на походные удаленные условия, в условиях полного отсутствия внешних источников электропитания, в условиях с неустойчивым и/или негарантированным питанием (при периодическом отключении электропитания), в чрезвычайных ситуациях и т.п.
Данное техническое решение может применяться альпинистами, геологами, туристами, путешественниками, охотниками, грибниками, рыбаками, сотрудниками МЧС и т.п. Кроме того, при специальном герметичном исполнении предлагаемого изобретения возможно использование его людьми подводных видов деятельности: подводники, водолазы, аквалангисты, дайверы и др.
В качестве одного из мобильных способов питания электронной системы выбран первый способ-аналог (Патент РФ №2150170, МКИ H02N 2/18, G21H 1/00, H02M 11/00. Способ питания электронной системы и устройство для осуществления. Нунупаров М.С. Опубл. 27.05.2000 в БИ №5, 2000), заключающийся в преобразовании неэлектрической энергии в электрическую и накоплении электрических зарядов для питания электронной системы, при преобразовании неэлектрической энергии в электрическую осуществляют генерацию электрических зарядов с высоким электрическим потенциалом, а перед накоплением электрических зарядов осуществляют понижение их потенциала и увеличение их количества. В этом способе для преобразования неэлектрической энергии в электрическую используют пьезоэффект, трибоэффект или эффект радиоактивного распада с излучением заряженных частиц.
Устройство, реализующее этот способ, содержит генератор электрических зарядов, использующий преобразование неэлектрической энергии в электрическую, и накопитель электрических зарядов, выход которого является выходом устройства, в него введен преобразователь энергии зарядов, вход которого подключен к выходу генератора электрических зарядов, а выход - к входу накопителя электрических зарядов, при этом упомянутый преобразователь выполнен с возможностью увеличения количества электрических зарядов, поступающих на его вход, и понижения потенциала электрических зарядов на его выходе. Генератор электрических зарядов в этом устройстве выполнен на основе пьезоэлемента, трибоэлемента или радиоактивного источника заряженных частиц.
Данные способ и устройство имеют ограничения функциональных возможностей из-за малого срока хранения электрических зарядов в накопителях, определяемые утечками и потерями, характерными для большинства электрических элементов, используемых в таком качестве. Данное техническое решение не обладает достаточной многофункциональностью, т.к., например, у него отсутствует возможность управления током потребления, отсутствует возможность одновременного использования внешнего электрического источника питания и собственного генератора. Также эксплуатационные параметры подобных устройств сильно зависят от условий окружающей среды (температуры, давления, влажности). Все это ограничивает область применения и число пользователей подобных способа и устройства.
Известен мобильный способ питания, реализованный на основе представителя семейства электродинамических источников питания. В одном из них за счет использования возобновляемой мускульной силы человека путем периодического ручного надавливания на рычажную рукоятку приводится во вращение маховик, закрепленный на роторе генератора, вырабатывающего электрическую энергию. Наиболее известными примерами, реализующими этот способ электрического питания, являются рычажные фонари типа «Жук» и «Жучок» (Патент РФ №2064628, МПК F21L 13/00. Электродинамический фонарь. Радченко В.И., Газизулин Г., Коротков В.М. Опубл. 27.07.1996 или Патент РФ на полезную модель №27851, МПК F21L 13/00. Электродинамический фонарь. Кравцов П.Ю. Опубл. 20.02.2003).
На основе подобных устройств реализуются широко известные походные источники энергии для зарядки мобильных электронных устройств (http://www.mobi.ru/Articles/4996/Kak_sdelat_pohodnoe_zaryadnoe_ustroistvo_iz_inercionnogo_fonarika.htm, http://namba.kg/#!/video/302924).
Лишь небольшим усовершенствованием можно считать способ, выбранный в качестве второго аналога, в котором дополнительно используются операции (действия) по выпрямлению и стабилизации сформированного электрического сигнала. Этот способ реализован в фотовспышке с электродинамическим источником питания (Патент РФ на полезную модель №1192 МПК H05B 41/30. Фотовспышка с электродинамическим источником питания. Волков Е.Е. Опубл. 16.11.1995 в БИ №11), состоящей из корпуса, внутри которого размещены электронная схема зарядки, полупроводниковый выпрямитель, стабилизатор-ограничитель напряжения, переключатель для возможности работы от электрохимических элементов, индикатор-сигнализатор зарядки, контейнер для электрохимических элементов, и имеющей на корпусе стыковочные детали для крепления к фотоаппарату, введен электродинамический ручной генератор переменного тока, также размещенный внутри корпуса, к выходной обмотке которого подключен упомянутый выпрямитель.
Данные способ и устройства основаны на возобновляемой мускульной энергии человека, из-за небольших массы и габаритов обладают высокой мобильностью и транспортабельностью.
Недостатками данных способа и устройства является ограничение функциональных возможностей из-за невозможности регулирования передаточного соотношения между ручным приводом в виде рычажной рукоятки и генератором и соответственно регулирования уровня формируемого сигнала, а также отсутствие возможности накопления механической энергии и последующего ее использования для выработки электроэнергии. Отсутствует возможность использования внешнего электропитания и комбинированного режима работы за счет использования этого внешнего электропитания совместно с вырабатываемым электросигналом.
Известны способы электрического питания, основанные на рекуперации запасенной ранее механической энергии в механическом накопителе. Среди наиболее известных вариантов таких способов используется накопитель механической энергии на основе маховиков, т.н. инерциальные аккумуляторы энергии, разрабатываемые под руководством проф. Гулиа Н.В. (Гулиа Н.В. Инерционные аккумуляторы энергии. - Воронеж: Изд-во ВГУ, 1973. - С.112-118. - 240 с., Новая концепция автомобиля и электробуса. «Автомобильная промышленность», №2, 2000, Супермаховики - из суперкарбона! «Изобретатель и рационализатор», 12(672), 2005, публикация в электронной библиотеке «Наука и техника» Международной общественной организации «Наука и техника», интернет-ресурсы: http://n-t.ru/tp/ts/ci.htm, http://n-t.ru/tp/ts/nke.htm.
а также http://mintrans.eit.ru/upload/iblock/594/ngt%20uwe%20var.pdf).
В основе функционирования такого способа лежит запасание кинетической энергии в инерциальном аккумуляторе с последующим его преобразованием в электрическую.
Подобный способ могут реализовать разные устройства. Одно из устройств может состоять из обратимой электромашины, работающей как в режиме генератора, так и двигателя, механически связанной с накопителем механической энергии, использующего маховик, и преобразователя (как правило) выпрямителя созданного электрического сигнала.
Однако данные способ и устройство не обладают достаточной многофункциональностью, т.к., например, у него отсутствует возможность управления током потребления, отсутствует возможность управления режимом работы накопителя механической энергии в зависимости от выходных параметров созданного электрического сигнала (ток I, напряжение U), отсутствует возможность одновременного использования внешнего электрического источника питания и обратимой электромашины, работающей в режиме генератора. Также у этого технического решения малый срок хранения накопленной механической энергии.
Достигнутый уровень по теме изобретения наиболее наглядно и полно представлен в способе накопления кинетической энергии большой мощности и энергоемкости, выбранном в качестве прототипа предлагаемого изобретения, (публикация в электронной библиотеке «Наука и техника» Международной общественной организации «Наука и техника», дата публикации 04.12.2012, интернет-ресурс: http://n-t.ru/tp/ts/ci.htm).
Принцип действия заключается в том, что маховик раскручивается обратимой электромашиной, работающей в режиме генератора, от входного электрического сигнала. Потом обратимая электромашина переключается в режим генератора и начинает вырабатывать электрический сигнал от вращающегося по инерции маховика. Созданный сигнал выпрямляется и используется для электропитания нагрузки.
Подобный способ могут реализовать разные устройства. Одно из устройств может состоять из обратимой электромашины, работающей как в режиме генератора, так и двигателя, механически связанной с накопителем механической энергии, использующего маховик, и преобразователя (как правило) выпрямителя созданного электрического сигнала.
Данные способ- и устройство-прототип по результатам экспериментальных данных подтвердили высокую эффективность при накоплении кинетической энергии большой мощности и энергоемкости.
Однако недостатками данных способа- и устройства-прототипа является ограничение функциональных возможностей по следующим причинам:
- невозможность функционирования в удаленных от электрической сети местах, например, от механического привода на основе возобновляемой мускульной силы человека;
- невозможность управлять режимом работы накопителя механической энергии в зависимости от выходных параметров созданного электрического сигнала (ток I, напряжение U);
- малый срок хранения накопленной механической энергии.
Технической задачей, решаемой предлагаемыми способом и устройствами, является расширение функциональных возможностей.
Указанная задача обеспечивается тем, что в способе накопления энергии и электрического питания, заключающемся в том, что используют сигнал внешней электросети и обратимую электромашину для преобразования электрической энергии в механическую энергию движения и обратно, применяют накопитель, механически связанный с обратимой электромашиной, для накопления механической энергии, создают режим накопления механической энергии за счет подачи сигнала внешней электросети на обратимую электромашину, передают вращение от обратимой электромашины к накопителю, создают режим питания путем преобразования накопленной механической энергии за счет передачи вращения от накопителя к обратимой электромашине, преобразуя последней механическую энергию в электрическую и формируя электрический сигнал, выпрямляют этот электрический сигнал и формируют на основе него сигнал питания, вводят механический привод, использующий мускульную энергию человека, управляют режимом расходования накопленной механической энергии за счет введения управляемого блокиратора накопителя, фиксируют и индицируют максимальное и минимальное значение накопленной механической энергии, вводят коробку передач с двумя ручками, с помощью которой управляют направлением и передаточным соотношением при передаче вращения между механическим приводом, механическим накопителем и обратимой электромашиной, из сигнала внешней электросети формируют второй электрический сигнал, коммутируют первый и второй электрические сигналы для сложения и последующего выпрямления, управляют последовательностью этих коммутаций, стабилизируют выпрямленный сигнал, формируют первый следящий режим питания, в котором коробкой передачи организуют механическую связь для передачи вращения от накопителя обратимой электромашине, анализируют параметры сигнала питания и на основе них формируют третий электрический сигнал для управления блокиратором накопителя.
Согласно изобретению указанный результат достигается тем, что формируют второй следящий режим, в котором коробкой передачи организуют новую механическую связь для передачи вращения от механического привода обратимой электромашине.
Согласно изобретению это достигается также тем, что формируют третий следящий режим, в котором за счет коммутации дополнительно используют сигнал внешней электросети для формирования сигнала питания.
Кроме того, указанная техническая задача достигается тем, что формируют четвертый следящий режим, в котором коробкой передачи организуют другую дополнительную механическую связь для передачи вращения от механического привода обратимой электромашине и за счет коммутации используют сигнал внешней электросети для формирования сигнала питания.
Помимо этого указанный результат согласно изобретению обеспечивается тем, что в качестве анализируемых параметров сигнала питания используют его ток и напряжение, при этом механический привод выполнен на основе педального привода, причем накопитель реализуют за счет использования спиральной пружины, а управление передачей накопленной механической энергии к обратимой электромашине осуществляют за счет использования блокиратора, управляющего процессом раскручивания спиральной пружины, при этом фиксацию максимального и минимального значений накопленной механической энергии производят за счет использования датчика, а индикацию производят за счет применения индикатора, при этом коммутацию сигналов с выхода обратимой электромашины и внешней электросети осуществляют за счет использования двух коммутаторов.
Также согласно изобретению это достигается тем, что в устройстве аккумулирования энергии и электрического питания, содержащем корпус и размещенный внутри него накопитель с валом, обратимую электромашину с валом, преобразователь с входом и выходом, выпрямитель с входом и выходом, у выпрямителя создают второй вход, при этом вводят панель управления с тремя выходами, индикатор с двумя входами, педальный привод, коробку передач и две ручки для управления ей, устройство сравнения с одним входом и тремя выходами, два коммутатора, причем первый из которых с четырьмя входами и одним выходом, а второй - с тремя входами и одним выходом, и систему управления с четырьмя выходами и четырьмя входами, при этом блокиратор с двумя входами и датчик на основе двух выключателей с двумя выходами, причем у накопителя вводят два входа и два выхода, при этом первый выход системы управления связан с первым входом индикатора, а второй вход последнего с первым выходом датчика, при этом второй выход системы управления подсоединен ко второму входу накопителя, причем третий выход системы управления подключен к первому входу первого коммутатора, а второй вход которого вместе с первым входом накопителя подключены к первому выходу панели управления, при этом второй выход которой соединен со вторым входом второго коммутатора, а третий выход - с первым входом системы управления, второй вход которой соединен со вторым выходом накопителя, при этом первый выход которого соединен со вторым входом индикатора, причем третий вход первого коммутатора соединен с выходом обратимой электромашины, а четвертый - с выходом преобразователя и третьим входом второго коммутатора, а выход второго коммутатора связан со вторым входом выпрямителя, причем первый вход которого подключен к выходу первого коммутатора, при этом выход выпрямителя связан с входом устройства сравнения, а третий выход которого является выходом устройства, а первый и второй выходы подключены соответственно к третьему и четвертому входам системы управления, причем электрический вход устройства является входом преобразователя, при этом коробка передач механически связывает вал обратимой электромашины с валом накопителя и педальным приводом.
Отличием устройства является то, что в накопитель вводят спиральную пружину, механически связанную с валом, блокиратор с двумя входами и датчик с двумя выходами, при этом первый и второй входы блокиратора являются первым и вторым входами накопителя, а первый и второй выходы последнего - первым и вторым выходами датчика.
Полученное новое качество от данной совокупности признаков ранее не было известно и достигается только в данных способе и устройстве.
Работа способа и устройства поясняется чертежами.
На фиг.1 представлена схема устройства, реализующего предлагаемый способ, на основе механического накопителя энергии 9 с использованием спиральной пружины 10.
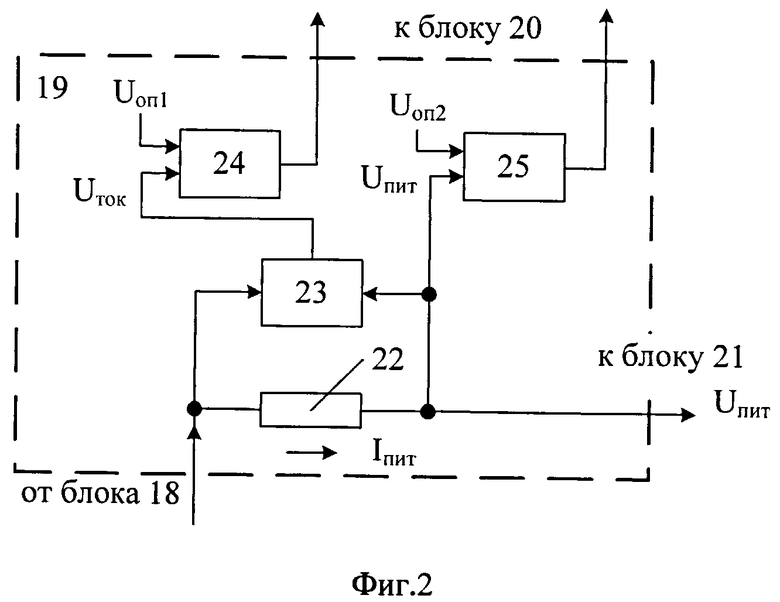
Фиг.2 демонстрирует вариант исполнения устройства сравнения 19.
Предлагаемый способ можно реализовать на основе разных устройств в зависимости от массогабаритных параметров, принципов действия, КПД хранения накопленной энергии и генерирования электрической энергии, максимального срока хранения накопленной энергии и др.
Устройство, реализующее предлагаемый способ, при использовании механического накопителя энергии на основе спиральной пружины (фиг.1) содержит следующие элементы: корпус 1, педальный привод 2, коробку передач 3, ручки коробки передач (в дальнейшем по тексту - ручка) 4 и 5, панель управления 6, индикатор 7, валы 8 и 13, механический накопитель энергии 9 (в дальнейшем по тексту - накопитель), состоящий из спиральной пружины 10, блокиратор 11, датчик 12, обратимую электромашину 14, преобразователь 15, коммутаторы 16 и 17, выпрямитель 18, устройство сравнения 19, систему управления 20.
Один из вариантов устройства сравнения 19 представлен на фиг.2 и состоит из резистора 22, дифференциального усилителя 23, компараторов 24 и 25.
Блокиратор 11 управляется как механически, так и электрически и может быть выполнен на основе фиксирующего элемента типа храповика. Датчик 12 имеет два предельных выключателя, фиксирующих максимальное и минимальное состояние закрутки спиральной пружины 10 накопителя 9 по максимуму и минимуму накопленной механической энергии. Этот датчик 12 имеет механический и электрический выходы, подключенные соответственно к механическому входу индикатора 7 (для индикации оператору, на фиг.1 эта связь показана утолщенной линией со стрелкой) и второму входу системы управления 20 (для автоматического управления).
Коммутаторы 16 и 17 представляют собой электромеханические коммутирующие устройства, управляемые за счет механической (механическим контактом) и электрических (электронной коммутацией) связей. В начале работы при отсутствии напряжения питания Uпит и обесточенных блоках коммутация осуществляется механически от панели управления 6 (на фиг.1 связи показаны утолщенными линиями со стрелками), а после их запитки Uпит коммутация осуществляется уже электрически от системы управления 20: для коммутатора 16 от третьего выхода последней, а для коммутатора 17 - четвертого.
Коробка передач 3 предназначена для изменения частоты и крутящего момента при передаче вращения между валами 8, 13 и педальным приводом 2 в разных режимах работы устройства. При выборе нужного направления и передаточного соотношения ручками 4 и 5 можно создавать разнообразные механические связи между педальным приводом 2, валами 8 и 13. При этом может передаваться вращение от педального привода 2 к валу 8 и/или валу 13, от вала 8 к валу 13 и, наоборот, от вала 13 к валу 8. Такие комбинации соответствуют разным режимам работы при реализации предлагаемого способа: режимам накопления энергии, режимам питания и комбинированным режимам.
Вращение от педального привода 2 через вал 8 с помощью коробки передач 3 механическое может передаваться в накопитель 9 за счет закрутки спиральной пружины 10. Так может осуществляться запасание механической энергии. Информация о состоянии спиральной пружины 10 (ее минимальном и максимальном запасе энергии) фиксируется датчиком 12, а ее фиксация или освобождение определяется блокиратором 11, механически управляемым от первого выхода панели управления 6, а электрически - от второго выхода системы управления 20.
Второй механический выход панели управления 6 подключен ко второму входу коммутатора 17, а третий выход панели управления 6 соединен с первым входом системы управления 20.
Обратимая электромашина 14 используется как в режиме двигателя, так и в режиме генератора и электрически подключена к третьему входу коммутатора 16. К его первому входу подключен третий выход системы управления 20, а второй вход, вместе с механическим входом блокиратора 11, связан с первым механическим выходом панели управления 6. Выход коммутатора 16 подключен к первому входу выпрямителя 18.
Первые два механических выхода панели управления 6 используются и для коммутации сигналов (во вторых входах коммутаторов 16 и 17) и для управления состоянием блокиратора 11, подобно приводу.
Первый выход системы управления 20 подключен к первому входу индикатора 7. Сигнал внешней электросети U1 подается на вход преобразователя 15, а сигнал U2 на его выходе подается на четвертый вход коммутатора 16 и на третий вход коммутатора 17. Первый вход последнего связан с четвертым выходом системы управления 20, а его выход соединен со вторым входом выпрямителя 18.
Выпрямитель 18 реализован на основе пассивных элементов (т.к. он должен работать еще до появления сигнала питания Uпит). Он суммирует входные сигнал U3 и сигнал U2 после коммутатора 17 и формирует выпрямленный и стабилизированный выходной сигнал U4. Этот сигнал U4 поступает на вход устройства сравнения 19, первый и второй выход которого подключены соответственно к третьему и четвертому входам системы управления 20. Третий выход устройства сравнения 19 формирует сигнал питания Uпит, использующийся для запитывания всех блоков устройства и являющийся выходным сигналом, поступающим на нагрузку 21.
В устройстве сравнения 19 (фиг.2) резистор 22 с малым известным сопротивлением R включен в выходную цепь последовательно с нагрузкой 21. К обоим концам этого резистора 22 подключены входы дифференциального усилителя 23, выход которого соединен со вторым входом компаратора 24. Сигнал питания Uпит также подключен ко второму входу компаратора 25. На первые входы компараторов 24 и 25 подаются соответствующие опорные сигналы Uоп1 и Uоп2. Выходы обоих компараторов 24 и 25 следуют к третьему и четвертому входам системы управления 20.
На фиг.1 у блоков устройства имеются как механические связи (выделены утолщением), так и электрические (более тонкие). Механические связи, существующие у панели управления 6, используются на начальном периоде функционирования каждого режима работы, во время переходного процесса пока еще все блоки обесточены или напряжение питания Uпит не достигло своего стандартного номинального значения, соответствующего ГОСТ и/или ТУ на электронные компоненты и блоки устройства. После того как Uпит достигло своего стандартного номинального значения, управление полностью переходит системе управления 20, обладающей приоритетом. Подразумевается, что в процессе работы между управлением работы блоков устройства механическими и электрическими связями нет конфликтов, что технически реализовать несложно.
Способ осуществляют в работе следующим образом.
Для достижения максимально широких функциональных возможностей в предложенном способе использование каждой передачи коробки передач 3 имеет свое целевое назначение и зависит от многих обстоятельств: требуемая мощность Pнагр сигнала питания Uпит для нагрузки 21, ресурс мускульной силы оператора (мужчина, старики/женщины/дети), наличие поблизости внешней электросети U1, текущего уровня накопленной энергии и общего плана (стратегии) использования накопленной энергии.
Далее в тексте подразумевается изначальное состояние коробки передач 3 без механической связи педального привода 2 и валов 8 и 13, соответствует «нейтральной передаче».
Предлагаемый способ можно реализовать на основе следующих режимов работы устройства:
1. Режимы накопления энергии - режимы накопления механической энергии накопителем 9 с отложенным использованием ее для генерирования сигнала питания Uпит;
2. Режимы питания - режимы формирования сигнала питания Uпит за счет использования накопленной ранее механической энергии и/или текущего использования существующих источников энергии (мускульной и/или электрической);
3. Комбинированные режимы - режимы работы, при которых совмещены режимы накопления механической энергии и режимы питания (режимы генерирования сигнала питания Uпит).
Все эти режимы работы 3-х типов могут быть описаны следующим образом.
1. Режимы накопления энергии:
1.1 - (первый режим накопления энергии) использование обратимой электромашины 11, вращаемой сигналом U1 от внешней электросети;
1.2 - (второй режим накопления энергии) использование педального привода 2;
1.3. - (третий режим накопления энергии) использование одновременно обратимой электромашины 14, вращаемой сигналом U1 от внешней электросети, и педального привода 2 (суммарно от двух источников);
2. Режимы питания
2.1 - (первый режим питания, первый следящий режим) использование обратимой электромашины 14, вращаемой накопителем 9 (спираль раскручивается, энергия расходуется);
2.2 - (второй режим питания) использование обратимой электромашины 14, вращаемой педальным приводом 2;
2.3 - (третий режим питания) использование сигнала U1 от внешней электросети;
2.4. - (четвертый режим питания, второй следящий режим) одновременное использование обратимой электромашины 14, вращаемой накопителем 9 (спираль раскручивается, энергия расходуется) и педальным приводом 2;
2.5 - (пятый режим питания, третий следящий режим) одновременное использование обратимой электромашины 14, вращаемой накопителем 9 (спираль раскручивается, энергия расходуется), и сигнала U1 от внешней электросети;
2.6 - (шестой режим питания) одновременное применение обратимой электромашины 14, вращаемой педальным приводом 2, и сигнала U1 от внешней электросети;
2.7 - (седьмой режим питания, четвертый следящий режиме) одновременное использование обратимой электромашины 14, вращаемой педальным приводом 2, накопителем 9 (спираль раскручивается, энергия расходуется), и сигнала U1 от внешней электросети.
3. Комбинированные режимы
3.1 - (первый комбинированный режим):
- накопление энергии накопителем 9 (спираль закручивается, энергия запасается) при работе обратимой электромашины 14 от сигнала U1 внешней электросети;
- питание от сигнала U1 внешней электросети;
3.2 - (второй комбинированный режим):
- накопление энергии накопителем 9 (спираль закручивается, энергия запасается) от педального привода 2;
- питание от сигнала U1 внешней электросети;
3.3 - (третий комбинированный режим):
- накопление энергии накопителем 9 при работе от обратимой электромашины 14 от сигнала U1 внешней электросети и педального привода 2;
- питание от сигнала U1 внешней электросети;
3.4 - (четвертый комбинированный режим):
- накопление энергии накопителем 9 (спираль закручивается, энергия запасается) от педального привода 2;
- питание от обратимой электромашины 14, вращаемой также педальным приводом 2;
3.5 - (пятый комбинированный режим):
- накопление энергии накопителем 9 (спираль закручивается, энергия запасается) от педального привода 2;
- питание от сигнала U1 внешней электросети и обратимой электромашины 14, вращаемой также педальным приводом 2;
В перечисленных выше режимах работы устройства (фиг.1) способ осуществляют следующим образом:
1. Для режимов накопления энергии
1.1 - в первом режиме накопления энергии при использовании обратимой электромашины 14 с сигналом от внешней электросети:
С помощью ручки 5 коробки передач 3 выбирается нужное передаточное соотношение между валом 13 обратимой электромашиной 14 и валом 8 накопителя 9. Панелью управления 6 в коммутаторе 16 задается такое состояние коммутации, чтобы передать сигнал U1 от внешней электросети с четвертого входа последнего на его третий вход, электрически связанный с обратимой электромашиной 14.
Сигнал U1, поступая на обратимую электромашину 14, приводит к вращению вала 13, которое через коробку передач 3 передается валу 8, закручивает спиральную пружину 10 и запасает механическую энергию. Факт достижения ее максимальной закрутки датчиком 12 передается за счет механической связи для индицирования индикатором 7 оператору для остановки процесса.
Возможно исполнение варианта устройства (схема не приведена в описании), в котором размыкающая пара контактов (или одна из пар контактов) датчика 12 будет включена последовательно в цепь сигнала U1 электросети и автоматически отключать его подачу.
1.2 - во втором режиме накопления энергии при использовании педального привода 2:
С помощью ручки 4 коробки передач 3 выбирается нужное и оптимальное, «по силам» человека (оператора) передаточное соотношение между педальным приводом 2 и валом 8 накопителя 9. В процессе вращения педалей педального привода 2 вал 8 вращается и закручивает спиральную пружину 10 и запасает механическую энергию. Факт достижения ее максимальной закрутки датчиком 12 передается за счет механической связи для индицирования индикатором 7 оператору для остановки процесса.
1.3 - в третьем режиме накопления энергии при использовании одновременно обратимой электромашины 14 и педального привода 2 (суммарно от двух источников вращения):
Этот режим может быть реализован для объединения мощности, передаваемой сигналом U1 от электросети и педального привода 2. Например, когда внешняя электросеть слаба и/или энергии, получаемой за счет мускульной энергии оператора недостаточно, и/или требуется ускорить процесс накопления механической энергии и т.п.
С помощью ручек 4 и 5 коробки передач 3 выбирается нужное передаточное соотношение между соответствующими парами: педальный привод 2 - вал 8 накопителя 9 и вал 13 обратимой электромашины 14 - вал 8 накопителя 9.
В процессе закручивания от двух источников энергии: от педального привода 2 и от обратимой электромашины 14 спиральная пружина 10 запасает механическую энергию. Факт достижения ее максимальной закрутки датчиком 12 передается за счет механической связи для индицирования индикатором 7 оператору для остановки процесса.
2. В режимах питания:
2.1 - в первом режиме питания (первом следящем режиме) при использовании обратимой электромашины 14, вращаемой накопителем энергии 9 (спираль раскручивается, энергия расходуется):
Этот режим питания является подстраиваемым, адаптивным и в нем используется накопленная ранее в накопителе 9 механическая энергия для выработки строго определенного дозированного количества электроэнергии, необходимого для обеспечения питания (контролируя значения Uпит и Iпит) нагрузки 21 или по заданной оператором программе. Он осуществляется следующим образом.
В начале работы электронные блоки обесточены и блокиратор 11 заблокирован. Ручкой 5 в коробке передач 3 выбирается нужное передаточное соотношение для передачи вращения вала 8 от накопителя 9 к валу 13 обратимой электромашины 14. В начале работы управление блокиратором 11 и коммутатором 16 производится механически от пульта управления 6, а потом осуществляется по сигналам от системы управления 20.
Первым выходом панели управления 6 (который является механическим) разблокируется (отводится) блокиратор 11 и, поступая на второй вход коммутатора 16, замыкает третий вход с выходом последнего. Сигнал с первого выхода панели управления 6, который является электрическим, поступает на первый вход системы управления 20.
Блокиратор 11 освобождает спиральную пружину 10, которая, раскручиваясь, начинает вращать вал 8, а с помощью коробки передач 3 и вал 13 обратимой электромашины 14, формируя на ее выходе электрический сигнал. Этот сигнал, последовательно проходя с третьего входа коммутатора 16 на его выход, через выпрямитель 18 и устройство сравнения 19 формирует сигнал питания Uпит, запитывающий все блоки устройства и нагрузку 21.
В устройстве сравнения 19 (фиг.2) резистор 22 с малым известным сопротивлениям R включен в выходную цепь последовательно с нагрузкой 21. Фактически, он является датчиком тока питания (тока потребления) т.к. при протекании через него тока Iпит на нем появляется разностный сигнал Ur~Iпит·R, пропорциональный Iпит. Этот разностный сигнал Ur усиливается дифференциальным усилителем 23 и в виде сигнала Uток поступает на второй вход компаратора 24, на первый вход которого подается первый опорный сигнал Uоп1. Если выполняется условие Uоп1≥Uток, то на выходе компаратора 24 появляется уровень логической «1», являющийся первым выходом устройства сравнения 19 и поступающий на третий вход системы управления 20. Он свидетельствует о том, что Iпит не превышает нужного значения. В другом случае (если Uоп1<Uток) на выходе компаратора 24 появляется логический «0», а это значит, что Iпит уже превышает заданное значение тока.
Компаратор 25 вторым входом соединен с сигналом питания Uпит. На первый его вход подается второй опорный сигнал Uоп2. Компаратором 25 происходит сравнение Uпит и Uоп2, а результат сравнения в виде выходного логического сигнала, являющегося вторым выходом устройства сравнения 19, поступает на четвертый вход системы управления 20. С помощью этого сигнала фиксируется превышение Uпит над сигналом Uоп2.
Полученные сигналы с выходов компараторов 24 и 25 позволяют в итоге отслеживать текущие значения Iпит и Uпит относительно заданных пороговых уровней, реализованных первым Uоп1 и вторым Uоп2 опорными сигналами. Значения Uоп1 и Uоп2 могут задаваться оператором, напрямую или через систему управления (эти связи на фиг.1 не показаны). В компараторах 24 и 25 может быть заложен гистерезис срабатывания для исключения нежелательных автоколебаний.
В зависимости от комбинации первого и второго выходного сигналов устройства сравнения 19 система управления 20 на втором своем выходе формирует сигнал, поступающий на второй вход блокиратора 11 и управляющий его состоянием: открывает или закрывает. Это приводит к следящему режиму управления использования энергии накопленной в накопителе 9, передаче вращения от вала 8 через коробку передач 3 валу 13 и выработки энергии в обратимой электромашине 14.
Так реализуется обратная связь, управляющая накопителем 9 и соответственно слежением за дозированной выработкой электроэнергии в зависимости от параметров выходного сигнала и/или от особенностей нагрузки 21, т.е. следящий режим работы. Таким образом, можно реализовать разные режимы питания с ограничением параметров Iпит и Uпит выходного сигнала: ограничивающий протекание большого тока, искробезопасный режим, управлять режимами расхода накопленной энергии (в т.ч. по заданной программе) и т.п.
Информация о текущем состоянии работы устройства, общий и оценка остаточного запаса механической энергии в накопителе энергии 10 отображается по сигналу на первом выходе системы управления 20 или по сигналу механического выхода датчика 12, поступающим на индикатор 7.
2.2 - во втором режиме питания при использовании обратимой электромашины 14, вращаемой от педального привода 2:
Особенность этого режима работы устройства заключается в использовании мускульной силы человека для формирования сигнала питания Uпит.
Первым механическим выходом панели управления 6 в коммутаторе 16 задается такое состояние коммутации, чтобы передать сигнал с выхода обратимой электромашины 14 на выход коммутатора 16. Также с помощью ручек 4 и 5 коробки передач 3 выбирается нужное и оптимальное, «по силам» человека передаточное соотношение между педальным приводом 2 и вращением вала 13 обратимой электромашины 14.
В процессе кручения педалей педального привода 2 вал 13 вращается и обратимая электромашина 14 вырабатывает сигнал, поступающий на третий вход коммутатора 16 и в виде сигнала U3, формирующийся на его выходе. Далее этот сигнал U3 поступает на вход выпрямителя 18 и в виде выпрямленного и стабилизированного выходного сигнала U4 после прохождения устройства сравнения 19 становится сигналом питания Uпит. Этот сигнал запитывает все электронные блоки устройства и следует на нагрузку 21.
По мере достижения сигналом Uпит стандартного номинального значения начинают функционировать все блоки устройства. При этом устройство сравнения 19 сравнивает текущий уровень сигнала Uпит с опорным значением Uоп2, которое задано для компаратора 25 (фиг.2), и в зависимости от этого формирует выходной логический сигнал, следующий на четвертый вход системы управления 20.
Ток потребления нагрузки Iпит с помощью устройства сравнения 19 (фиг.2) за счет резистора 22 сопротивлением R, дифференциального усилителя 23 и компаратора 24 также находится «под контролем». Как и описано выше на основе тока потребления появляется разностный сигнал Ur~Iпит·R, который после дифференциального усилителя 23 в виде сигнала Uток сравнивается с заданным уровнем Uоп2. Результат сравнения логическим сигналом следует на третий вход системы управления 20.
В зависимости от выходных сигналов устройства сравнения 19 система управления 20 на своем первом выходе выдает сигнал индикатору 7 для оператора. Это позволяет ему оценить потребность изменения скорости вращения педального привода 2 от параметров Uпит и Iпит нагрузки 21.
2.3 - в третьем режиме питания за счет использования внешней электросети:
При появлении внешней электросети устройство, реализующее предлагаемый способ, начинает работать в режиме электрического преобразователя, а механическая энергия, накопленная в накопителе 9, не расходуется.
Сигнал внешней электросети U1, проходя через преобразователь 15, далее сигналом U2 поступает на третий вход коммутатора 17. Оператором с помощью панели управления 6 за счет механической связи со вторым входом коммутатором 17 обеспечивается (выбирается) режим передачи этого сигнала на выход последнего и далее на второй вход выпрямителя 18. Его выпрямленный и стабилизированный выходной сигнал в виде сигнала U4, после прохождения устройства сравнения 19 становится сигналом питания Uпит, который запитывает все электронные блоки устройства и следует на нагрузку 21.
Как и прежних случаях, устройство сравнения 19, электрически связанное с системой управления 20 и индикатором 7, позволяет оценивать, достаточно ли мощности внешнего сигнала U1 для используемой нагрузки 21.
2.4 - в четвертом режиме питания (втором следящем режиме) при одновременном использовании обратимой электромашины 14, вращаемой накопителем 9 (спираль раскручивается, энергия расходуется) и педальным приводом 2:
Этот режим работы является разновидностью режима 2.1, представленного выше исходя из следующего: соединяя мускульную энергию оператора педального привода 2 и запасенную механическую энергию в накопителе 9 можно получить более мощностные характеристики сигнала питания: Iпит и Uпит.
Последовательность действий при использовании этого режима также практически аналогична представленной выше последовательности для режима 2.1. Отличие заключается лишь в том, что вначале ручкой 4 выбирают для оператора передаточное соотношении «по силам» в коробки передач 3 так, чтобы вращение педального привода 2 также передавалось к вращению вала 13 обратимой электромашины 14, как и вращение вала 8 (как режиме 2.1).
2.5 - в пятом режиме питания (третьем следящем режиме) при одновременном использовании обратимой электромашины 14, вращаемой накопителем 9 (спираль раскручивается, энергия расходуется), и внешней электросети:
Этот режим работы также является разновидностью режима 2.1, представленного выше. Он может использоваться в случаях, когда имеется возможность использовать внешнюю электросеть с сигналом U1 в качестве дополнительного источника энергии. Такой режим работы позволяет более экономно использовать запас механической энергии в накопителе 9.
Последовательность действий при реализации данного режима работы во многом подобна режиму 2.1. Отличие заключается в том, что в начальный момент времени со второго выхода панели управления 6 подается сигнал (воздействие) на второй вход коммутатора 17, приводящий к тому, что сигнал U2 с его третьего входа подается на выход, т.е. на второй вход выпрямителя 18. В последнем происходит суммирование входных сигналов U2 и U2, формируется выпрямленный и стабилизированный сигнал U4, на основе которого устройством сравнения 19 формируется сигнал питания Uпит.
По мере достижения сигналом Uпит уровня стандартного номинального значения все электронные блоки переходят в режим нормального функционирования и соответственно управление коммутатором 17 также переходит под управление сигнала с четвертого выхода системы управления 20. Система управления 20 для формирования управляющего сигнала на коммутатор 17 на своем четвертом выходе использует сигнал панели управления 6, подаваемый на первый вход системы управления 20.
В связи с тем, что в данном режиме работы для формирования Uпит используются два сигнала U2 и U3, то соответственно и нагрузочная способность всего устройства является увеличенной.
Как и прежде, с помощью устройства сравнения 19 осуществляется контроль параметров сигнала питания: Iпит и Uпит.
2.6 - в шестом режиме питания при одновременном использовании обратимой электромашины 14, вращаемой педальным приводом 2, и внешней электросети:
Этот режим работы похож на предыдущий режим работы 2.5. Он может использоваться при полном отсутствии запаса энергии (или его неприкосновенности) в накопителе 9 и когда имеется возможность использовать совместно педальный привод 2 и внешнюю электросеть с сигналом U1.
Последовательность действий при реализации данного режима работы почти полностью подобна режиму 2.5, а отличие заключается лишь в выборе с помощью ручек 4 и 5 коробки передач 3 нужного передаточного соотношения между педальным приводом 2 и валом 13 обратимой электромашины 14.
Нагрузочная способность такого режима работы является достаточно высокой. Устройством сравнения 19 производится контроль параметров сигнала питания: Iпит и Uпит.
2.7 - в седьмом режиме питания (четвертом следящем режиме) при одновременном использовании обратимой электромашины 14, вращаемой педальным приводом 2, накопителем 9 (спираль раскручивается, энергия расходуется), и сигнала U1 от внешней электросети:
В этом режиме питания реализуется максимальная нагрузочная способность предлагаемого устройства, т.к. используются все возможные источники энергии: педальный привод 2, энергия, запасенная ранее в накопителе 9, сигнал U1 от внешней электросети.
Последовательность действий при реализации данного режима работы подобна многим режимам, описанным ранее, но наиболее близка режиму 2.5. Основное отличие заключается лишь в выборе ручками 4 и 5 в коробке передач 3 нужного передаточного соотношения для передачи вращения от педального привода 2 валу 13 обратимой электромашины 14 дополнительно к уже имеющейся передаче вращения вала 8 к валу 13 обратимой электромашины 14. В этом случае с помощью коробки передач 3 валу передается вращение и от педального привода 2, и от накопителя энергии 9 и передаваемая энергия достигает своего максимального значения.
Устройство сравнения 19 позволяет контролировать параметры сигнала питания: Iпит и Uпит.
3. В комбинированных режимах (в которых за счет выбора передач в коробке передач 3 совмещаются режимы накопления энергии и питания):
3.1 - в первом комбинированном режиме при накоплении энергии накопителем 9 (спираль закручивается, энергия запасается) при работе обратимой электромашины 14 от внешней электросети и питании от сигнала U1 внешней электросети:
В данном режиме работы совмещены два режима: первый режим накопления энергии накопителем 9, работающий от обратимой электромашины 14, подробно описанный выше в п.1.1 и третий режим питания от сигнала U1 внешней электросети, подробно описанный выше в п.2.3.
3.2 - во втором комбинированном режиме при накоплении энергии накопителем 9 (спираль закручивается, энергия запасается) от педального привода 2 и питании от сигнала U1 внешней электросети:
Этот режим работы совмещает два режима работы: второй режим накопления энергии накопителем 9 от педального привода 2, подробно описанный выше в п.1.2 и третий режим питания от сигнала U1 внешней электросети, подробно описанный выше в п.2.3.
3.3 - в третьем комбинированном режиме при накоплении энергии накопителем 9 от работы обратимой электромашины 10 от сигнала U1 внешней электросети и педального привода 2 и питании от сигнала U1 внешней электросети:
Данный режим работы совмещает два режима работы: третий режим накопления энергии накопителем 9 при одновременном использовании обратимой электромашины 14 (вращаемой сигналом U1 внешней электросети) и педального привода 2, подробно описанный выше в п.1.3, и третий режим питания от сигнала U1 внешней электросети, подробно описанный выше в п.2.3.
3.4 - в четвертом комбинированном режиме при накоплении энергии накопителем 9 (спираль закручивается, энергия запасается) от педального привода 2 и питании от обратимой электромашины 10, вращаемой также педальным приводом 2;
Этот режим работы совмещает два режима работы: второй режим накопления энергии накопителем 9 от педального привода 2, подробно описанный выше в п.1.2, и первый режим питания от обратимой электромашины, также вращаемой педальным приводом 2, подробно описанный выше в п.2.1.
3.5 - в пятом комбинированном режиме при накоплении энергии накопителем 9 (спираль закручивается, энергия запасается) от педального привода 2 и питании от внешней электросети и обратимой электромашины 10, вращаемой также педальным приводом 2;
Данный режим работы совмещает два режима работы: второй режим накопления энергии накопителем 9 от педального привода 2, подробно описанный выше в п.1.2, и пятый режим питании при одновременном использовании обратимой электромашины, вращаемой педальным приводом 2, и сигнала U1 внешней электросети, подробно описанный выше в п.2.6.
Сущность способа заключается в следующем
1. В данном способе реализованы три типа режимов работы:
- 1 тип - 3 режима накопления механической энергии с ее отложенным использованием;
- 2 тип - 7 режимов питания за счет использования накопленной ранее механической энергии и/или дополнительного текущего использования имеющихся источников энергии (мускульной и/или электрической). Из них четыре режима питания являются следящими, т.е. подстраиваются по значениям заданных выходных параметров сигнала Iпит и Uпит;
- 3 тип - 5 комбинированных режима, в которых совмещены режимы накопления механической энергии и режимы питания.
Все это позволяет реализовать максимально широкие функциональные возможности предлагаемых способа и устройства.
2. В качестве механического накопителя энергии в данном изобретении предлагается использовать спиральные пружины, обладающие высоким КПД и наибольшим сроком хранения энергии. Известно, что, например, качественные стальные пружины могут хранить запас энергии несколько лет (http.//building-forum.ru/energosberezhenie/energiya-pruzhiny.php).
3. Для повышения эффективности расходования накопленной механической энергии во всех режимах питания, в которых используется обратимая электромашина 14, вращаемая накопителем энергии 9 (отдельно или в сочетании с использованием другого источника энергии), а именно: 2.1, 2.4, 2.5, 2.7 предлагается реализовать адаптивный, подстраиваемый, процесс формирования сигнала питания Uпит за счет организации обратной связи следящего типа.
Его особенность заключается в отслеживании текущих значений параметров выходного сигнала Uпит и Iпит за счет использования устройства сравнения 19, в котором заданы опорные сигналы Uоп1 и Uоп2. И за счет формирования сигналов рассогласования в виде логических выходных сигналов, формируемых устройством сравнения 19 и направляемых в систему управления 20, последним формируется сигнал, управляющий работой блокиратора 11 спиральной пружины 10. По ее освобождению или торможению/блокировке создается возможность для выработки (или ее приостановке) необходимой дозированной порции энергии посредством обратимой электромашины 14, которая компенсирует изменения параметров выходного сигнала Uпит и Iпит.
В режимах работы 2.4, 2.5, 2.7 использование следящей обратной связи можно удобно сочетать соответственно с использованием педального привода 2, сигнала U1 внешней электросети и их обоих вместе. Такими комбинациями можно достичь более высокой нагрузочной способности при компенсации возможных флуктуаций любого дополнительного источника энергии.
Таким образом, данный режим работы является следящим, имеет максимально широкие функциональные возможности, например, автоматически подстраиваясь под уровень потребления нагрузки 21, может максимально экономно расходовать запасенную в накопителе 9 механическую энергию для маломощных нагрузок или запитать нагрузку максимальным током потребления.
Помимо этого, за счет использования программируемой системы управления 20 возможна реализация также и разных жестких алгоритмов работы, дополнительно расширяющих функциональные возможности предложенного способа, например для следующих случаев:
- управление максимальным током потребления для защиты от короткого замыкания, в т.ч. для исключения выхода из строя нагрузки 21,
- обеспечение искробезопасного режима работы, исключающего возникновение искры от блоков устройства в условиях присутствия взрывоопасных газов и жидкостей,
- создание обязательного (неприкосновенного) запаса энергии на чрезвычайный случай.
Практическая реализация предлагаемого изобретения подтверждается практической реализацией его отдельных составляющих блоков. Использование механических накопителей энергии на основе спиральных пружин подтверждается многочисленными публикациями по их использованию и последовательному их усовершенствованию (Патент РФ №2159657. Пружинный аккумулятор механической энергии. Персидский С.А., МПК A63H 29/04, G04B 1/12, F03G 1/00. Опубл. 27.11.2000, Патент РФ №2046226 Аккумулятор механической энергии. Жуков А.П., Макаров П.М., Макравина М.Е., Базаров А.Е., МПК F16H 33/06. Опубл. 20.10.1995).
Блокиратор 11 с механическим (первый вход) и электрическим (второй вход) управлением может быть реализован на основе управляемого храповика с дуплексным (двухпозиционным) фиксатором на два положения (открыт/закрыт). При этом электрическое управление может быть реализовано, например, за счет применения электромагнитных приводов или приводов на основе пьезо-, магнитострикционного эффекта и подобных эффектов.
Коммутаторы 16 и 17 с механическим и электрическим управлением могут быть выполнены на основе совместного согласованного использования подвижных контактных групп, управляемых механически (механическая связь от панели управления 6), и, например, электромагнитных приводов, управляемых электрическим сигналом, подобных используемых в реле (электрическое управление от системы управления 20).
Концевой датчик 12 может быть реализован на основе переключателя с двумя контактными парами, управляемого механически для фиксации максимального и минимального значения накопленной механической энергии. Эти выключатели имеют выходы: электрический и механический, например, на основе гибкой механической связи, тросика.
Предлагаемое изобретение планируется к промышленному выпуску. Оно может иметь несколько практических исполнений, например, в виде передвижной авто- или мототележки, размещенной в багажнике автомобиля, в виде раскладного переносного устройства и небольших размеров с ручным приводом, подобно приводу фонарика «Жучок».
В зависимости от практического исполнения в предлагаемом устройстве помимо педального могут применяться и другие разные типы механических приводов, использующих мускульную энергию человека: заводной ключ (ручной завод), рычажный (кистевой или ножной завод) и др. Накопитель механической энергии может быть реализован и на основе других принципов действия: пружинные на основе плоских пружин или пружин другой формы (не спиральные), пневматический за счет сжатия воздуха и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБСЛУЖИВАНИЯ ОБУВИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2402967C2 |
| СПОСОБ ОБСЛУЖИВАНИЯ И ЭКСПЛУАТАЦИИ ОБУВИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2551756C1 |
| Способ управления дизель-электрическим агрегатом с маховичным аккумулятором и устройство для его реализации | 2017 |
|
RU2644819C1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ | 2003 |
|
RU2264307C2 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2658243C2 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2017 |
|
RU2652540C1 |
| ЗЕМЛЕРОЙНО-ТРАНСПОРТНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2537434C1 |
| Автономная гибридная энергоустановка | 2022 |
|
RU2792410C1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2011 |
|
RU2464182C2 |
Изобретение относится к средствам генерации и накопления электрической энергии. Технический результат заключается в расширении функциональных возможностей. Устройство аккумулирования энергии при использовании механического накопителя энергии на основе спиральной пружины содержит корпус, педальный привод, коробку передач, ручки коробки передач, панель управления, индикатор, валы, механический накопитель энергии, состоящий из спиральной пружины, блокиратор, датчик, обратимую электромашину, преобразователь, коммутаторы, выпрямитель, устройство сравнения, систему управления. Коробка передач предназначена для изменения частоты и крутящего момента при передаче вращения между валами и педальным приводом в разных режимах работы устройства. Вращение от педального привода через вал с помощью коробки передач может передаваться в накопитель за счет закрутки спиральной пружины. Так может осуществляться запасание механической энергии. Информация о состоянии спиральной пружины фиксируется датчиком, а ее фиксация или освобождение определяется блокиратором. Обратимая электромашина используется как в режиме двигателя, так и в режиме генератора. 2 н. и 5 з.п. ф-лы, 2 ил.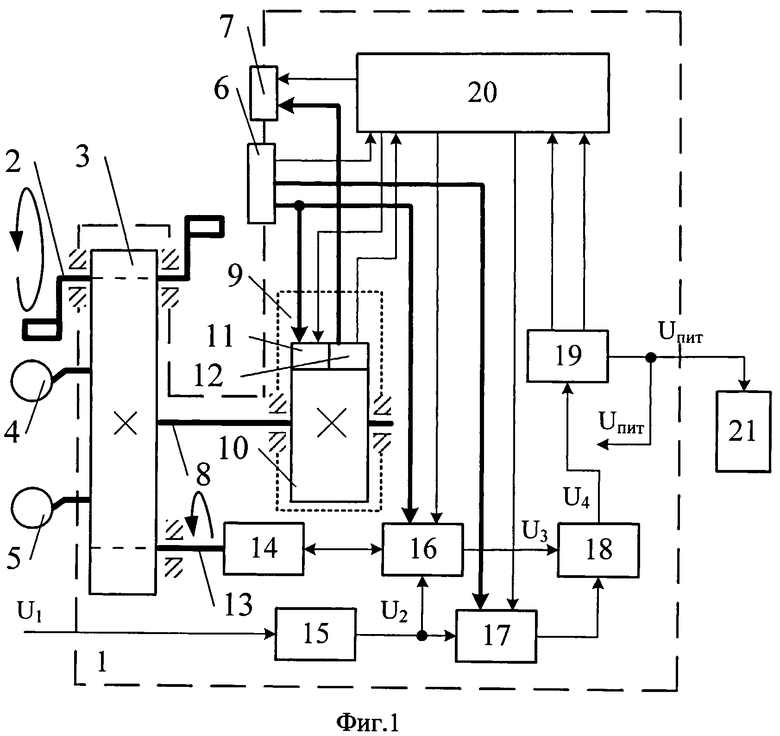
1. Способ накопления энергии и электрического питания, заключающийся в том, что используют сигнал внешней электросети и обратимую электромашину для преобразования электрической энергии в механическую энергию движения и обратно, применяют накопитель, механически связанный с обратимой электромашиной, для накопления механической энергии, создают режим накопления механической энергии за счет подачи сигнала внешней электросети на обратимую электромашину, передают вращение от обратимой электромашины к накопителю, создают режим питания путем преобразования накопленной механической энергии за счет передачи вращения от накопителя к обратимой электромашине, преобразуя последней механическую энергию в электрическую и формируя электрический сигнал, выпрямляют этот электрический сигнал и формируют на основе него сигнал питания, отличающийся тем, что вводят механический привод, использующий мускульную энергию человека, управляют режимом расходования накопленной механической энергии за счет введения управляемого блокиратора накопителя, фиксируют и индицируют максимальное и минимальное значение накопленной механической энергии, вводят коробку передач с двумя ручками, с помощью которой управляют направлением и передаточным соотношением при передаче вращения между механическим приводом, механическим накопителем и обратимой электромашиной, из сигнала внешней электросети формируют второй электрический сигнал, коммутируют первый и второй электрические сигналы для сложения и последующего выпрямления, управляют последовательностью этих коммутаций, стабилизируют выпрямленный сигнал, формируют первый следящий режим питания, в котором коробкой передачи организуют механическую связь для передачи вращения от накопителя обратимой электромашине, анализируют параметры сигнала питания и на основе них формируют третий электрический сигнал для управления блокиратором накопителя.
2. Способ по п.1, отличающийся тем, что формируют второй следящий режим, в котором коробкой передачи организуют новую механическую связь для передачи вращения от механического привода обратимой электромашине.
3. Способ по п.1, отличающийся тем, что формируют третий следящий режим, в котором за счет коммутации дополнительно используют сигнал внешней электросети для формирования сигнала питания.
4. Способ по п.1, отличающийся тем, что формируют четвертый следящий режим, в котором коробкой передачи организуют другую дополнительную механическую связь для передачи вращения от механического привода обратимой электромашине и за счет коммутации используют сигнал внешней электросети для формирования сигнала питания.
5. Способ по п.1, или п.2, или п.3, или п.4, отличающийся тем, что в качестве анализируемых параметров сигнала питания используют его ток и напряжение, при этом механический привод выполнен на основе педального привода, причем накопитель реализуют за счет использования спиральной пружины, а управление передачей накопленной механической энергии к обратимой электромашине осуществляют за счет использования блокиратора, управляющего процессом раскручивания спиральной пружины, при этом фиксацию максимального и минимального значений накопленной механической энергии производят за счет использования датчика, а индикацию производят за счет применения индикатора, при этом коммутацию сигналов с выхода обратимой электромашины и внешней электросети осуществляют за счет использования двух коммутаторов.
6. Устройство аккумулирования энергии и электрического питания, содержащее корпус и размещенный внутри него накопитель с валом, обратимую электромашину с валом, преобразователь с входом и выходом, выпрямитель с входом и выходом, отличающееся тем, что у выпрямителя создают второй вход, при этом вводят панель управления с тремя выходами, индикатор с двумя входами, педальный привод, коробку передач и две ручки для управления ей, устройство сравнения с одним входом и тремя выходами, два коммутатора, первый из которых выполнен с четырьмя входами и одним выходом, а второй - с тремя входами и одним выходом, и систему управления с четырьмя выходами и четырьмя входами, при этом блокиратор выполнен с двумя входами, а датчик - на основе двух выключателей с двумя выходами, причем у накопителя вводят два входа и два выхода, при этом первый выход системы управления связан с первым входом индикатора, а второй вход последнего - с первым выходом датчика, при этом второй выход системы управления подсоединен ко второму входу накопителя, причем третий выход системы управления подключен к первому входу первого коммутатора, второй вход которого вместе с первым входом накопителя подключен к первому выходу панели управления, второй выход которой соединен со вторым входом второго коммутатора, а третий выход - с первым входом системы управления, второй вход которой соединен со вторым выходом накопителя, первый выход которого соединен со вторым входом индикатора, причем третий вход первого коммутатора соединен с выходом обратимой электромашины, а четвертый - с выходом преобразователя и третьим входом второго коммутатора, а выход второго коммутатора связан со вторым входом выпрямителя, первый вход которого подключен к выходу первого коммутатора, при этом выход выпрямителя связан с входом устройства сравнения, третий выход которого является выходом устройства, а первый и второй выходы подключены соответственно к третьему и четвертому входам системы управления, причем электрический вход устройства является входом преобразователя, при этом коробка передач механически связывает вал обратимой электромашины с валом накопителя и педальным приводом.
7. Устройство по п.6, отличающееся тем, что в накопитель вводят спиральную пружину, механически связанную с валом, блокиратор с двумя входами и датчик с двумя выходами, при этом первый и второй входы блокиратора являются первым и вторым входами накопителя, а первый и второй выходы последнего - первым и вторым выходами датчика.
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ФОНАРЬ | 1993 |
|
RU2064628C1 |
| АВТОНОМНЫЙ ИСТОЧНИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ С РУЧНЫМ МЕХАНИЧЕСКИМ ПРИВОДОМ | 2006 |
|
RU2308643C1 |
| Способ одновременной регистрации нескольких измерений, производимых в скважине различными кароттажными зондами и приборами | 1949 |
|
SU80632A1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2011 |
|
RU2464182C2 |
| JP 0011297101 A, 29.10.1999 | |||

