Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству формирования стереоскопических изображений для стереоскопической съемки и особенно к технологии регулирования длины съемочного базиса в виде расстояния между линзами из множества линз для формирования стереоскопических изображений.
Уровень техники
В последнее время усиливается спрос на камеры (устройства формирования стереоскопических изображений), которые могут снимать 3D (стереоскопические) изображения. В качестве методов формирования стереоскопических изображений известны светоделительный метод (метод полупрозрачного зеркала) съемки с использованием полупрозрачного зеркала, метод стереопары (метод горизонтальной стереопары) для съемки с использованием двух устройств формирования изображений, размещенных физически рядом и т.д. В данных способах съемки устройства формирования изображений установлены на опоре, называемой Ригом для съемки, и степень свободы при установке устройства формирования изображений является более высокой. Например, с высокой степенью свободы могут быть выбраны: расстояние между линзами - двумя линзами для съемки стереоскопических изображений (длина съемочного базиса; далее названа «МОР», т.е. межосевое расстояние), конвергенция, угол поля зрения объектива и т.д.
Однако при высокой степени свободы существует проблема в том, что при каждой съемке требуется много усилий и времени для настройки и регулировки, так как устройства установлены на риге. Более того, существует проблема, что риг для светоделительного метода является слишком большим и не подходит для использования во время съемки спортивных состязаний и деловых встреч.
Для решения указанных проблем две камеры 2D видеосъемки для съемки методом стереопары помещают в одном корпусе для формирования интегрированной 3D камеры с двумя объективами. Интегрированная 3D камера с двумя объективами, имеющая такую конфигурацию, не требует монтажа или регулирования выравнивания. Более того, камера является компактной и удобной при переноске на съемке спортивных состязаний и деловых встреч и обладает преимуществом быстрого начала съемки после установки в течение короткого времени.
Однако интегрированная 3D камера с двумя объективами работает в основном по методу стереопары, и регулирование МОР ограничено. То есть соответствующие оптические системы и формирователи изображений двух объективов физически пересекаются друг с другом, и затруднительно выполнить МОР более коротким, чем определенное расстояние, установленное в зависимости от позиций размещения оптических систем и формирователей изображений. Соответственно, например, в случае, когда съемка проводится очень близко к объекту съемки, параллакс, когда объект съемки отображается на 3D дисплее несколько метров позади него, превышает диапазон параллакса, при котором человек может удобно просматривать 3D изображения.
В качестве случаев, когда объект съемки и устройство формирования изображений расположены близко, возможны, например, съемка деловой встречи с человеком, съемка на заднем фоне в спортивной передаче и т.д. В данных случаях расстояние между объектом съемки и устройством формирования изображений составляет около 1-2 м, и точка конвергенции установлена на расстояние от 1 до 2 м. В данных случаях наиболее пригодное МОР для приведения параллакса в пределах диапазона, в котором человек может удобно просматривать 3D изображения, выполняется равным от 10 мм до 40 мм. Однако в такой 3D камере с двумя объективами сложно получить короткое МОР при сохранении качества изображения и функциональности, то есть без уменьшения диаметра линз или размера формирователей изображений.
В случае, когда съемка выполняется по вышеописанному светоделительному методу, два устройства формирования изображений физически не пересекаются друг с другом, и МОР может быть очень коротким. Однако, как описано выше, существует проблема, что необходимо много усилий и времени для настройки и регулировки при каждой съемке, и все еще остается проблема, что способ не является подходящим для съемки деловой встречи с человеком или съемки на заднем фоне спортивной передачи.
Например, в Патентном документе 1 (JP-A-2003-5313) описано устройство съемки стереоскопических изображений, в котором точка конвергенции может регулироваться до произвольной позиции с фокусной точкой камеры, совпадающей с точкой конвергенции двух глаз. Используя устройство, съемка может выполняться с МОР, равным расстоянию между зрачками человека, и в случае ближней съемки могут быть сняты видеоизображения с естественными стереоскопическими эффектами.
Раскрытие изобретения
Однако в конфигурациях, описанных в Патентном документе 1, особенно на Фиг.3А и 3В и 5А и 5В, для совпадения точки конвергенции и фокусной точки друг с другом, считается необходимым, чтобы оптическая система формирования изображений фокусировалась на бесконечность. В данном случае при нормальной съемке, то есть съемке в состоянии фокусировки, в котором постоянно фокусируются на движущемся объекте или т.п., считается, что снятые видеоизображения являются очень неестественными. Например, когда объект съемки перемещается вперед и назад, снимается видеоизображение, на котором сам объект съемки не перемещается вперед или назад, но окружающая панорама перемещается вперед и назад. То есть в устройстве съемки стереоскопических изображений, описанном в Патентном документе 1, существуют проблемы, касающиеся невозможности изменить фокус без изменения позиции на экране или изменения позиции на экране без изменения фокуса.
Таким образом, желательно выполнять съемку стереоскопических изображений с короткой длиной съемочного базиса при сохранении качества изображения и функций.
Устройство формирования стереоскопических изображений по варианту осуществления настоящего изобретения содержит оптическую систему объектива, имеющую функцию формирования изображения объекта в виде действительного изображения или мнимого изображения, и множество оптических систем формирования изображений, которые формируют множество световых потоков от объекта съемки, выходящих по разным путям из оптической системы объектива, далее в виде изображений с параллаксом, используя множество независимых оптических систем. Более того, в случае, если значение фокусного расстояния, когда оптическая система объектива отображает объект съемки в виде действительного изображения, является положительным, и значение фокусного расстояния, когда оптическая система объектива отображает объект съемки в виде мнимого изображения, является отрицательным, значения фокусного расстояния (f) оптической системы объектива и расстояния (L) от задней главной точки оптической системы объектива до передней главной точки оптической системы формирования изображения установлены такими, чтобы они удовлетворяли следующему уравнению:
|f/(L-f)|≤1,
при этом значение фокусного расстояния является положительным, когда оптическая система объектива формирует изображение объекта в виде действительного изображения, и значение фокусного расстояния является отрицательным, когда оптическая система объектива формирует изображение объекта в виде мнимого изображения.
При данной конфигурации реальные зрачки (эффективные зрачки) формируются между объектом съемки и оптической системой объектива или между оптической системой объектива и оптическими системами формирования изображений, и формируются изображения, полученные через эти эффективные зрачки. С помощью установки значений фокусного расстояния (f) оптической системы объектива и расстояния (L) от задней главной точки оптической системы объектива до передней главной точки оптической системы формирования изображений значений, которые удовлетворяют вышеописанному уравнению, расстояние между эффективными зрачками может быть получено более коротким, чем действительная длина съемочного базиса, установленная в зависимости от расстояния между линзами множества оптических систем формирования изображений. В результате, стереоскопическая съемка может выполняться с более короткой длиной съемочного базиса, тогда как качество изображения и функции сохраняются без уменьшения диаметра линз и размера формирователей изображений в устройстве формирования изображений.
Краткое описание чертежей
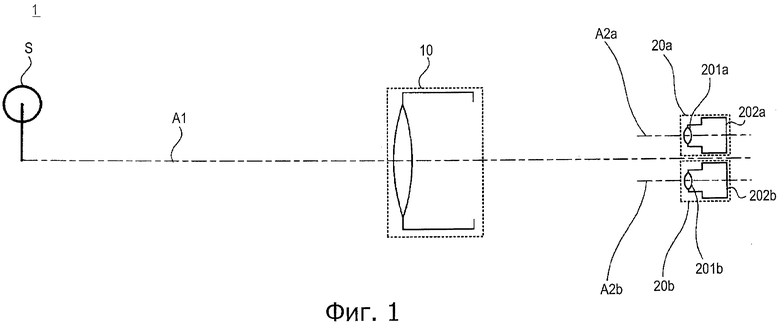
Фиг.1 представляет собой блок-схему, показывающую пример конфигурации устройства формирования стереоскопических изображений по одному варианту осуществления настоящего изобретения.
Фиг.2 представляет собой схему оптического пути, показывающую пути, по которым перемещаются лучи, проходящие через главные точки линз оптических систем формирования изображений, из лучей, излучаемых от объекта съемки, по одному варианту осуществления настоящего изобретения.
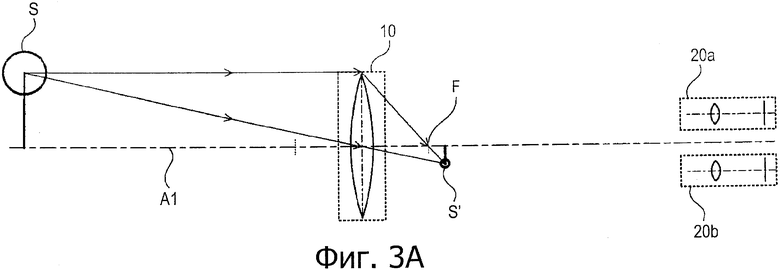
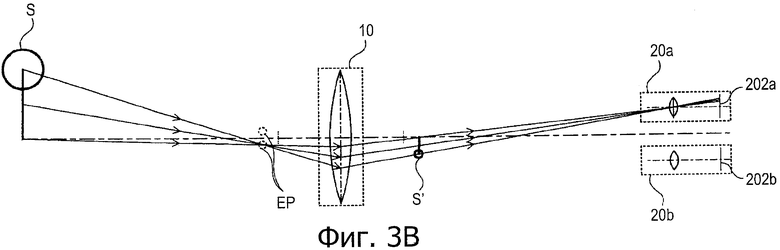
Фиг.3А и 3В представляют собой поясняющие схемы для разъяснения принципа формирования эффективных зрачков по одному варианту осуществления настоящего изобретения; Фиг.3А представляет собой схему оптического пути, показывающую пути, по которым перемещаются луч, параллельный оптической оси, из лучей, излучаемых из определенной точки объекта съемки, и луч, проходящий через центр линзы оптической системы объектива, а Фиг.3В представляет собой схему оптического пути, показывающую пути, по которым перемещаются лучи, излучаемые из центра линзы оптической системы формирования изображений.
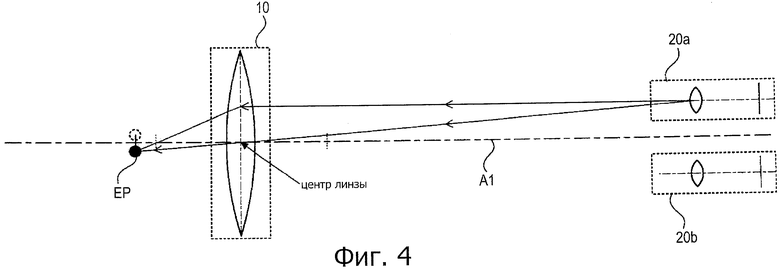
Фиг.4 представляет собой схему оптического пути, показывающую пути, по которым перемещаются луч, параллельный оптической оси, и луч, проходящий через центр линзы оптической системы объектива, из лучей, излучаемых из центра линзы оптической системы формирования изображений, по одному варианту осуществления настоящего изобретения.
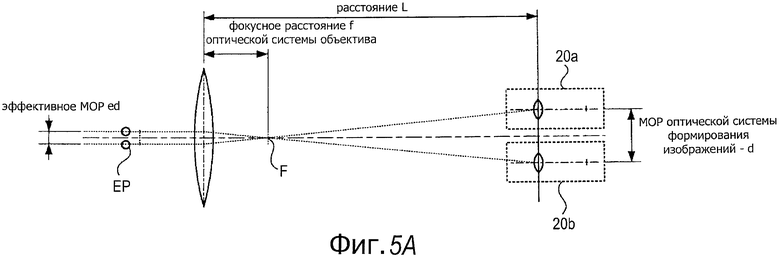
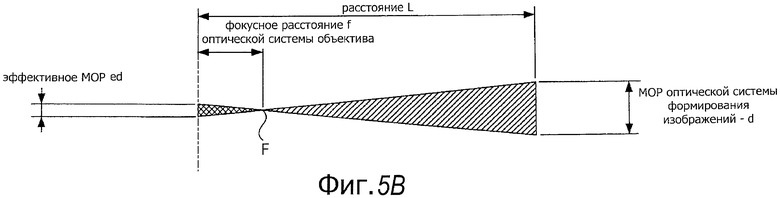
Фиг.5А и 5В представляют собой поясняющие схемы для разъяснения способа расчета эффективного МОР по одному варианту осуществления настоящего изобретения; Фиг.5А представляет собой схему оптического пути, показывающую пути лучей, параллельных оптической оси, из лучей, проходящих через эффективные зрачки, а на Фиг.5В изображен фрагмент, представляющий собой только часть, необходимую для расчета эффективного МОР, из информации, показанной на Фиг.5А.
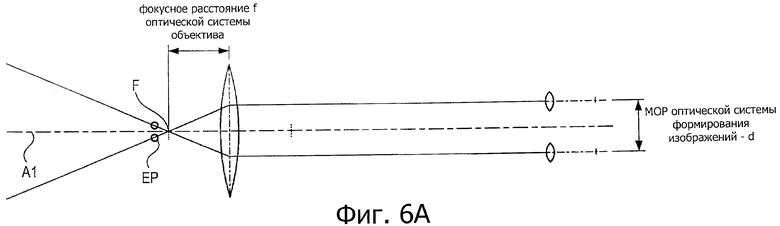
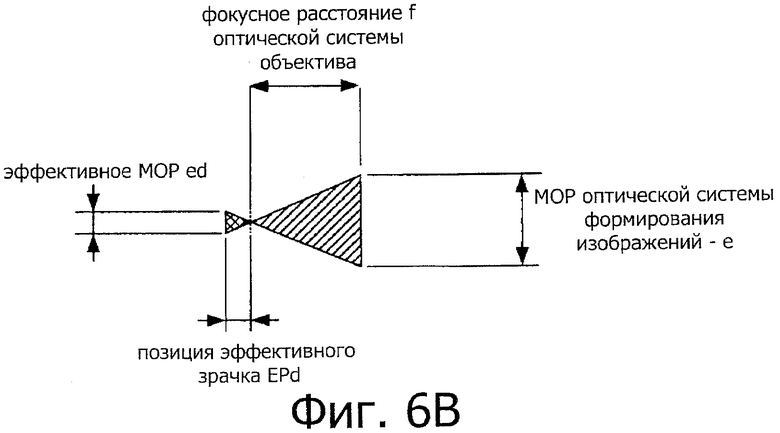
Фиг.6А и 6В представляют собой поясняющие схемы для разъяснения способа расчета позиций эффективного зрачка по одному варианту осуществления настоящего изобретения; Фиг.6А представляет собой схему оптического пути, показывающую пути лучей, параллельных оптической оси, из лучей, излучаемых из центров линз оптических систем формирования изображений, а на Фиг.6В изображен фрагмент, представляющий собой только часть, необходимую для расчета позиций эффективного зрачка, из информации, показанной на Фиг.6А.
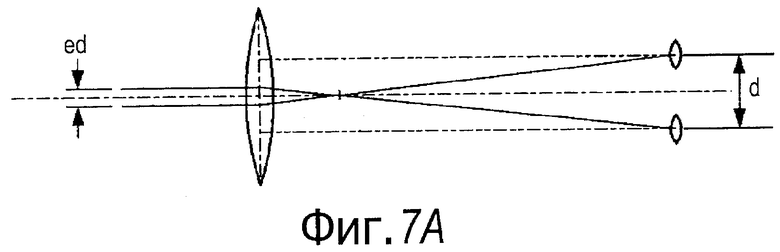
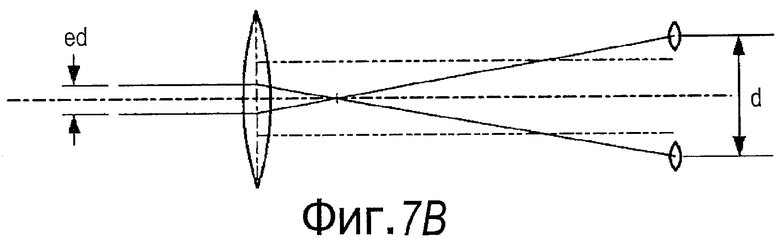
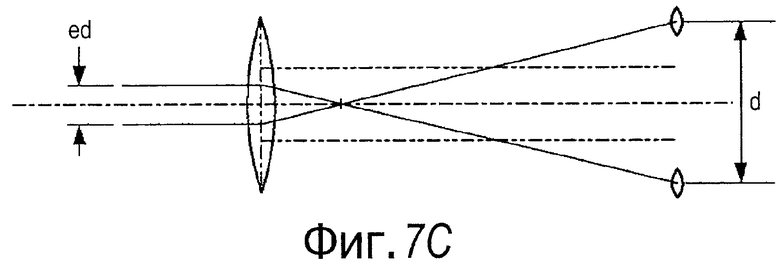
Фиг.7А-7С представляют собой поясняющие схемы, показывающие изменения эффективного МОР, когда изменяется ширина МОР оптической системы формирования изображений по одному варианту осуществления настоящего изобретения; Фиг.7А показывает пример, когда МОР оптической системы формирования изображений выполнено более узким, а Фиг.7В показывает пример, когда МОР оптической системы формирования изображений выполнено более длинным, чем показанное на Фиг.7А, а Фиг.7С показывает пример, когда МОР оптической системы формирования изображений выполнено более длинным, чем показанное на Фиг.7В.
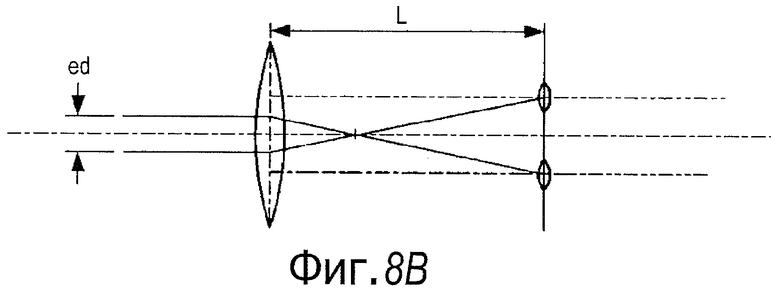
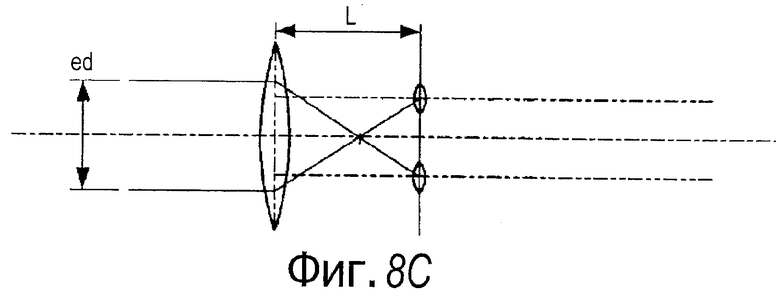
Фиг.8А-8С представляют собой поясняющие схемы, показывающие изменения эффективного МОР, когда изменяется расстояние от задней главной точки оптической системы объектива до передней главной точки оптической системы объектива; Фиг.8А показывает пример, когда расстояние от задней главной точки оптической системы объектива до передней главной точки оптической системы объектива выполняется более широким. Фиг.8В показывает пример, когда расстояние от задней главной точки оптической системы объектива до передней главной точки оптической системы объектива выполняется более узким, чем показанное на Фиг.8А, а Фиг.8С показывает пример, когда расстояние от задней главной точки оптической системы объектива до передней главной точки оптической системы объектива выполняется более узким, чем показанное на Фиг.8В.
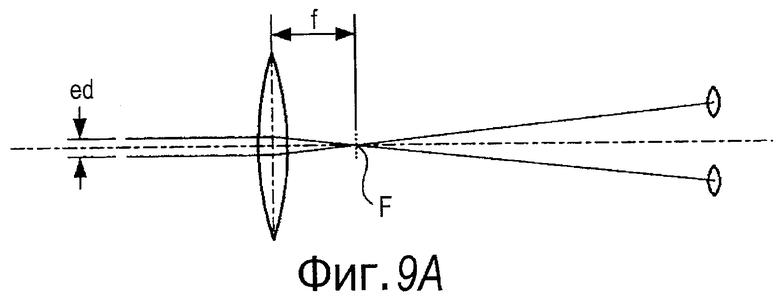
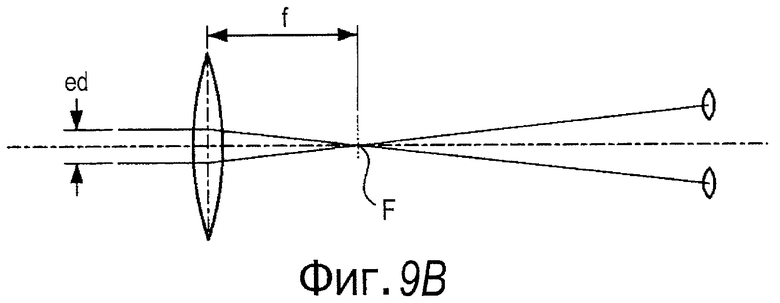
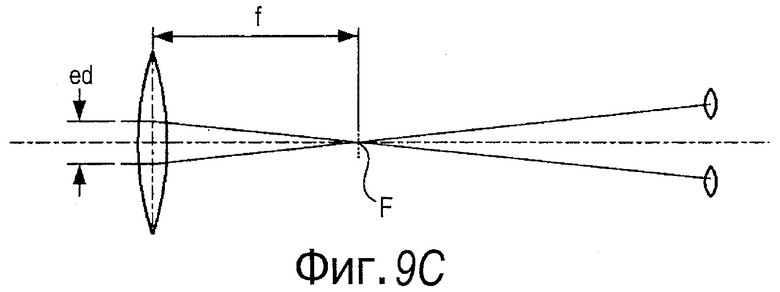
Фиг.9А-9С представляют собой поясняющие схемы, показывающие изменения эффективного МОР, когда фокусное расстояние оптической системы объектива изменяется по одному варианту осуществления настоящего изобретения; Фиг.9А показывает пример, когда фокусное расстояние выполняется более узким, Фиг.9В показывает пример, когда фокусное расстояние выполняется более широким, чем показанное на Фиг.9А, а Фиг.9С показывает пример, когда фокусное расстояние выполняется более широким, чем показанное на Фиг.9В.
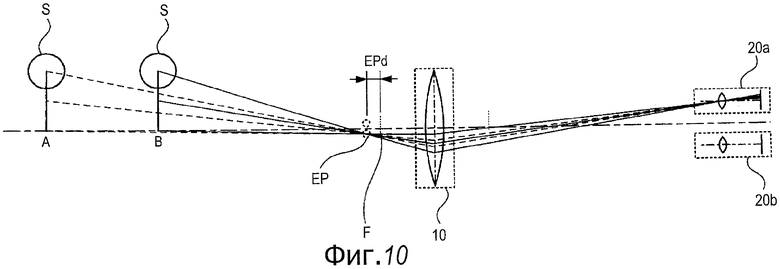
Фиг.10 представляет собой схему оптического пути, показывающую пути, по которым лучи, излучаемые от объекта съемки и проходящие через центр линзы оптической системы формирования изображений, проходят, когда объект съемки перемещается по оптической оси по одному варианту осуществления настоящего изобретения.
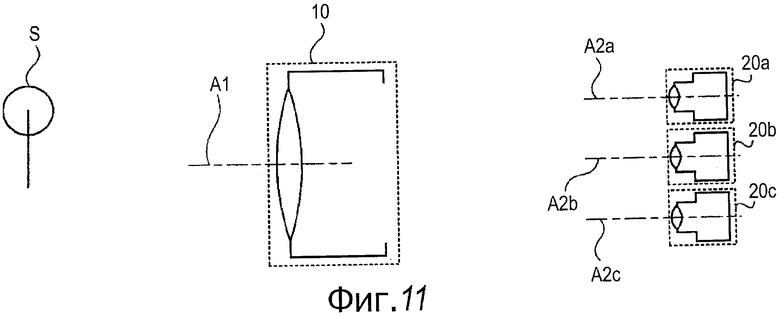
Фиг.11 представляет собой блок-схему, показывающую пример конфигурации устройства формирования стереоскопических изображений по модифицированному примеру одного варианта осуществления настоящего изобретения.
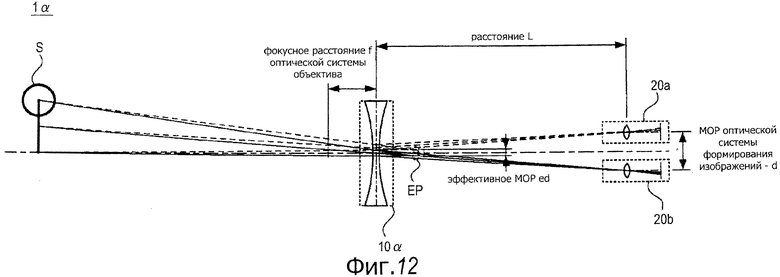
Фиг.12 представляет собой схему оптического пути, показывающую пути, по которым перемещаются лучи, проходящие через главные точки линз оптических систем формирования изображений, из лучей, излучаемых от объекта съемки, по модифицированному примеру одного варианта осуществления настоящего изобретения.
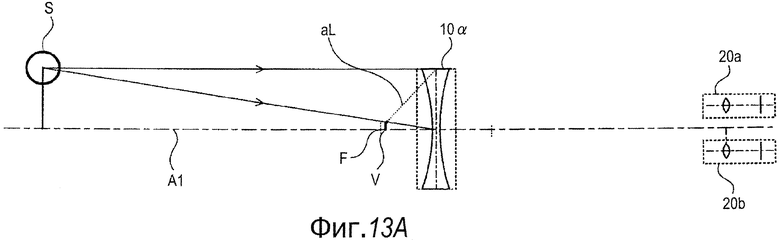
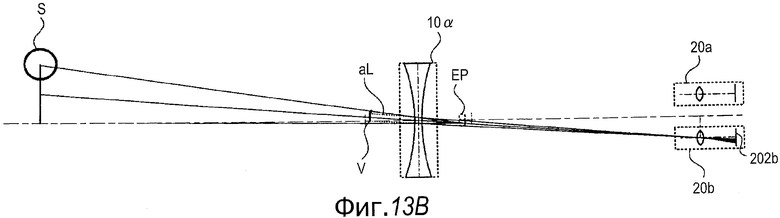
Фиг.13А и 13В представляют собой поясняющие схемы для разъяснения принципа формирования эффективных зрачков по модифицированному примеру одного варианта осуществления настоящего изобретения; Фиг.13А представляет собой схему оптического пути, показывающую пути, по которым перемещаются луч, параллельный оптической оси, и луч, проходящий через центр линзы оптической системы объектива, из лучей, излучаемых из определенной точки объекта съемки, а Фиг.13В представляет собой схему оптического пути, показывающую пути, по которым перемещаются лучи, излучаемые от центра линзы оптической системы формирования изображений.
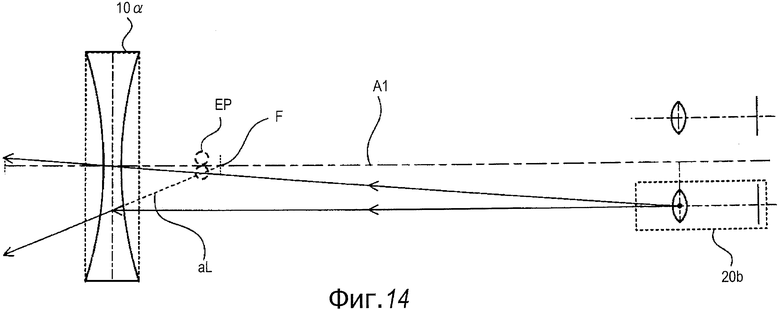
Фиг.14 представляет собой схему оптического пути, показывающую пути, по которым перемещаются луч, параллельный оптической оси, и луч, проходящий через центр линзы оптической системы объектива, из лучей, излучаемых от центра линзы оптической системы формирования изображений, по модифицированному примеру одного варианта осуществления настоящего изобретения.
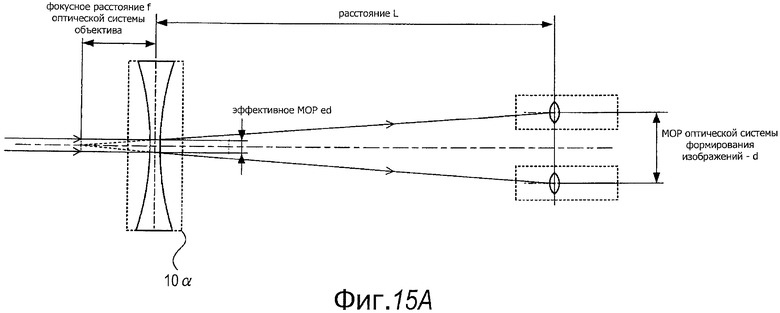
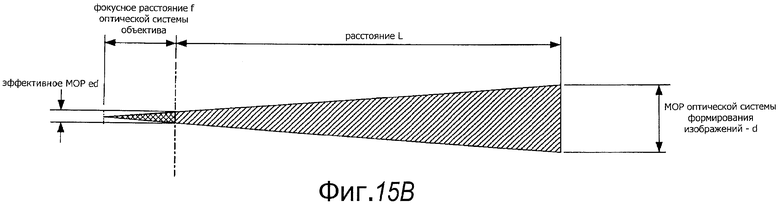
Фиг.15А и 15В представляют собой поясняющие схемы для разъяснения способа расчета эффективного МОР по модифицированному примеру одного варианта осуществления настоящего изобретения; Фиг.15А представляет собой схему оптического пути, показывающую пути лучей, параллельных оптической оси, из лучей, проходящих через эффективные зрачки, а на Фиг.15В изображен фрагмент, представляющий собой только часть, необходимую для расчета эффективного МОР, из информации, показанной на Фиг.15А.
Описание вариантов осуществления
Ниже будут разъяснены варианты осуществления для выполнения настоящего изобретения. Разъяснение будет выполнено в следующем порядке:
1. Пример конфигурации устройства формирования стереоскопических изображений
2. Различные модифицированные примеры
I. Пример конфигурации устройства формирования стереоскопических изображений
Пример общей конфигурации системы формирования стереоскопических изображений
Фиг.1 показывает пример конфигурации устройства формирования стереоскопических изображений по первому варианту осуществления настоящего изобретения. Устройство 1 формирования стереоскопических изображений включает в себя оптическую систему 10 объектива, имеющую функцию формирования изображения объекта съемки S в виде действительного изображения, и две оптические системы 20а, 20b формирования изображений, которые соответственно отображают множество световых потоков объекта съемки, выходящих снова из разных путей оптической системы 10 объектива в виде изображений с параллаксом. В данном варианте осуществления для оптической системы 10 объектива используется собирающая линза. Следует отметить, что в примере, показанном на Фиг.1, для общепонятного разъяснения, оптическая система 10 объектива представляет собой тонкую линзу, имеющую фокусное расстояние f, оптические системы 20а, 20b формирования изображений включают в себя тонкие линзы 201а, 201b и соответственно формирователи 202а, 202b изображений. Действующая оптическая система 10 объектива включает в себя совокупность или совокупность групп линз, фильтров, диафрагм, приводных механизмов объектива и т.д. Более того, в дополнение к механизмам предусмотрены функция изменения фокусного расстояния, функция фокусировки и другие функции. Оптические системы 20а, 20b формирования изображений также фактически включают в себя совокупность или совокупность групп линз, фильтров, диафрагм, приводных механизмов объектива и т.д. и могут иметь функцию изменения фокусного расстояния, функцию фокусировки и другие функции. В конфигурации, показанной на Фиг.1, оптическая система 10 объектива и оптические системы 20а, 20b формирования изображений размещены так, что оптическая ось А1 оптической системы 10 объектива и оптические оси А2а, A2b соответствующих оптических систем 20а, 20b формирования изображений могут находиться в одной и той же плоскости.
Пример формирования эффективного МОР в устройстве формирования стереоскопических изображений Далее значительное МОР (здесь именуемое "эффективным МОР"), образованное в устройстве 1 формирования стереоскопических изображений, будет разъяснено со ссылкой на Фиг.2. Фиг.2 представляет собой схему оптического пути, показывающую пути, по которым перемещаются лучи, проходящие через главные точки линз оптических систем 20а, 20b формирования изображений, из лучей, излучаемых от объекта съемки S. Световые потоки, излучаемые от объекта съемки S, поступают в оптическую систему 10 объектива, затем, направляемые двумя оптическими системами 20а, 20b формирования изображений и отображаемые на формирователях 202а и 202b изображений, и соответственно образуют несовпадающие изображения. При этом учитываются лучи, проходящие через главную точку fH20a линзы оптической системы 20а формирования изображений, и лучи, проходящие через переднюю главную точку £H20b линзы оптической системы 20b формирования изображений. Например, группа лучей, проходящих через главную точку fH20a оптической системы 20а формирования изображений, представляет собой верхние лучи, показанные пунктирными линиями, и лучи, проходящие через главную точку fH20b оптической системы 20b формирования изображений, представляют собой нижние лучи, показанные сплошными линиями. Более того, лучи, показанные пунктирными линиями, и лучи, показанные сплошными линиями, соответственно проходят через два эффективных зрачка (здесь именуемые эффективными зрачками ЕР), существующих виртуально между объектом съемки S и оптической системой 10 объектива. Затем, объект съемки S, видимый с позиций эффективных зрачков ЕР, отображается на формирователе 202а изображений оптической системы 20а формирования изображений и на формирователе 202b изображений оптической системы 20b формирования изображений. То есть расстояние между этими двумя эффективными зрачками ЕР (здесь, именуемое "эффективным MOPed") представляет собой значительное МОР в устройстве 1 формирования стереоскопических изображений. Принцип формирования эффективных зрачков ЕР между объектом съемки S и оптической системой 10 объектива будет описан позднее со ссылкой на Фиг.3А, 3В и 4.
Эффективное MOPed выражается следующим уравнением 1:
ed=f/(L-f)×d… (Уравнение 1)
В уравнении 1 "f” представляет собой фокусное расстояние оптической системы 10 объектива, "L" представляет собой расстояние от задней главной точки rH10 оптической системы 10 объектива до передней главной точки fH20a оптической системы 20а формирования изображений и передней главной точки £H20b оптической системы 20b формирования изображений. Следует отметить, что когда оптическая система представляет собой идеал в качестве тонкой линзы, как показано на Фиг.2, нет разницы между передней главной точкой и задней главной точкой, и передняя главная точка и задняя главная точка совпадают с главной точкой. Более того, "d" представляет собой МОР, установленное в зависимости от позиций размещения оптической системы 20а формирования изображений и оптической системы 20b формирования изображений, и обычно относится к расстоянию между передними главными точками оптической системы формирования изображений, то есть расстоянию между передними главными точками fH20a и fH20b оптической системы 20а формирования изображений и оптической системы 20b формирования изображений.
Например, фокусное расстояние f оптической системы 10 объектива равно 70 мм, а расстояние L равно 370 мм. Более того, оптическая система 20а формирования изображений и оптическая система 20b формирования изображений размещены отдельно на расстоянии d=60 мм с оптической осью А1 оптической системы 10 объектива в качестве оси симметрии (MOPd оптической системы формирования изображений = 60 мм). В данном случае, эффективное MOPed вычисляют равной 14 мм из описанного выше уравнения 1. Это означает, что по сравнению с MOPd оптической системы формирования изображений (60 мм), полученной в зависимости от позиций размещения оптических систем 20а и 20b формирования изображений, значительное МОР (эффективное MOPed) может быть выполнено короче в число раз, равное f/(L-f) (14 мм).
Следовательно, задавая фокусному расстоянию f и расстоянию L оптической системы 10 объектива значения, которые удовлетворяют следующему уравнению 2, эффективное MOPed может быть выполнено более коротким, чем MOPd оптической системы формирования изображений, полученное в зависимости от позиций размещения оптических систем 20а и 20b формирования изображений. Следует отметить, что следующее уравнение имеет место при допущении, что собирающая линза используется в качестве линзы оптической системы 10 объектива, и его фокусное расстояние f является положительным (f>0).
f/(L-f)<1… (Уравнение 2)
Принцип формирования эффективных зрачков в устройстве формирования стереоскопических изображений
Далее в устройстве 1 формирования стереоскопических изображений принцип виртуального формирования эффективных зрачков между объектом съемки S и оптической системой 10 объектива будет разъяснен со ссылкой на Фиг.3А, 3В и 4. Во-первых, пространственное изображение S', образованное оптической системой 10 объектива, будет разъяснено со ссылкой на Фиг.3А, и затем пути лучей от объекта съемки S до формирователя 202а (202b) изображений будут разъяснены со ссылкой на Фиг.3В. Затем, механизм формирования эффективных зрачков будет разъяснен со ссылкой на Фиг.4.
1) В отношении пространственного изображения
Как показано на Фиг.3А, световые потоки, излучаемые от объекта съемки S, проходят через оптическую систему 10 объектива и отображаются снова, и тем самым, пространственное изображение S' формируется между оптической системой 10 объектива и оптическими системами 20а, 20b формирования изображений. Пространственное изображение S' видимо так, как будто на его позиции был объект, и может быть видимо из точки обзора на линзах оптических систем 20а, 20b формирования изображений. Принцип формирования пространственного изображения S' можно легко понять рассмотрением двух лучей луча, параллельного оптической оси А1, из лучей, излучаемых из определенной точки объекта съемки S, и луча, проходящего через центр линзы оптической системы 10 объектива. Луч, параллельный оптической оси А1, из лучей, выходящих из определенной точки объекта съемки S, становится лучом, проходящим через фокусную точку F оптической системы 10 объектива после прохождения через линзу вследствие свойства линзы оптической системы 10 объектива. С другой стороны, луч, проходящий через центр линзы оптической системы 10 объектива, перемещается по прямой линии без изменения вследствие свойства линзы. Затем эти два луча пересекаются снова в другой точке. Точка пересечения представляет собой точку в пространственном изображении S', соответствующую объекту съемки S, который излучил лучи.
2) Пути лучей от объекта съемки до формирователя изображений оптической системы формирования изображений
Как показано на Фиг.3В, если лучи излучаются из центров линз оптических систем 20а, 20b формирования изображений, лучи, излучаемые от объекта съемки S, перемещаются по путям, аналогичным путям этих лучей. Следовательно, пути общепонятны рассмотрением из центров линз оптических систем 20а, 20b формирования изображений. В примере, показанном на Фиг.3В, путь, по которому перемещается луч, излучаемый из центра линзы оптической системы 20а формирования изображений, будет разъяснен в виде примера. Луч, излучаемый из центра линзы оптической системы 20а формирования изображений, проходит через определенную точку пространственного изображения S', затем достигает линзы оптической системы 10 объектива и перемещается по направлению к определенной точке объекта съемки S, соответствующей "определенной точке пространственного изображения S'”. Луч от центра линзы оптической системы 20а формирования изображений до формирователя 202а изображений может быть получен продолжением луча, проходящего через центр линзы оптической системы 20а формирования изображений к позиции формирователя 202а изображений без изменения.
3) В отношении эффективных зрачков
Затем принцип формирования эффективных зрачков ЕР будет разъяснен со ссылкой на Фиг.3 В. Создание пути луча от объекта съемки S до формирователя 202а изображений оптической системы 20а формирования изображений, как описано выше, выполняется в отношении лучей, проходящих через другие точки пространственного изображения S'. Затем, известно, что лучи, излучаемые от центра линзы оптической системы 20а формирования изображений, пересекаются снова в определенной точке после прохождения через оптическую систему 10 объектива. Эта точка представляет собой эффективный зрачок ЕР. Эффективный зрачок ЕР представляет собой точку, через которую проходят все лучи, проходящие через центр линзы оптической системы 20а формирования изображений. Следовательно, изображение, отображаемое на воспроизводящей поверхности формирователя 202а изображений оптической системы 20а формирования изображений, представляет собой изображение, равное изображению, снятому с помощью эффективного зрачка ЕР в качестве зрачка. То есть, отображением объекта съемки S с использованием устройства 1 формирования стереоскопических изображений по варианту осуществления может быть получено изображение, аналогичное изображению, снятому камерой, размещенной на позиции эффективного зрачка ЕР.
Позиция, в которой формируется эффективный зрачок ЕР, может быть получена также рассмотрением луча, параллельного оптической оси А1, из лучей, излучаемых от центра линзы оптической системы 20а формирования изображений, и луча, проходящего через центр линзы оптической системы 10 объектива. Как описано выше, если лучи излучаются от центра линзы оптической системы 20а формирования изображений, лучи, излучаемые от объекта съемки S, перемещаются по путям, аналогичным путям, по которым перемещаются эти лучи. Это означает, что, если точка излучения света размещается в центре линзы оптической системы 20а формирования изображений, все лучи, излучаемые из этой точки, проходят через эффективный зрачок ЕР. То есть, эффективный зрачок ЕР представляет собой "тень линзы" или "пространственное изображение" оптической системы 20а формирования изображений. Следовательно, как показано на Фиг.4, известно, что эффективный зрачок ЕР формируется в точке, в которой снова пересекаются луч, параллельный оптической оси А1, из лучей, излучаемых от центра линзы оптической системы 20а формирования изображений, и луч, проходящий через центр линзы оптической системы 10 объектива.
Способ расчета эффективного МОР
Как описано выше, эффективный зрачок ЕР представляет собой точку, в которой проходят все лучи от объекта съемки S по направлению к центру линзы оптической системы 20а (20b) формирования изображений. Эти лучи включают в себя лучи, параллельные оптической оси А1. Для получения эффективного MOPed, общедоступно рассмотрение лучей, параллельных оптической оси А1. На Фиг.5А пути лучей, параллельных оптической оси А1, из лучей, проходящих через эффективные зрачки ЕР, показаны пунктирными линиями. Лучи, параллельные оптической оси А1, проходящие через эффективные зрачки ЕР, проходят через линзу оптической системы 10 объектива, и затем перемещаются по направлению к фокусной точке F линзы оптической системы 10 объектива вследствие свойства линзы. Лучи, которые прошли через фокусную точку F, перемещаются по направлению к центрам соответствующих линз оптических систем 20а, 20b формирования изображений по определению эффективных зрачков ЕР.
На Фиг.5В изображен фрагмент, представляющий собой только часть характеристики, необходимую для получения эффективного MOPed, из информации, показанной на Фиг.5А. На чертеже показаны два треугольника, имеющие сходные друг с другом формы. Один представляет собой больший заштрихованный треугольник, нижняя сторона которого является MOPd оптической системы формирования изображений в виде расстояния между соответствующими линзами оптических систем 20а, 20b формирования изображений, а высота - результатом операции (расстояние L - фокусное расстояние f оптической системы объектива). Другой является заштрихованным меньшим треугольником, нижняя сторона которого представляет собой эффективное MOPed в виде расстояния между двумя эффективными зрачками ЕР, а высотой является фокусное расстояние f оптической системы 10 объектива. Эти два треугольника имеют сходные друг с другом формы, и они выражаются следующими уравнениями вследствие их свойства.
Эффективное MOPed: MOPd оптической системы формирования изображений = фокусное расстояние f оптической системы объектива: расстояние L - фокусное расстояние f оптической системы объектива Следовательно,
ed×(L-f)=f×d и
ed=f/(L-f)×d… вычисляют Уравнение (1).
Позиция эффективного зрачка ЕР по оптической оси может быть вычислена с помощью фокусного расстояния f линзы оптической системы 10 объектива, MOPd оптической системы формирования изображений и эффективного MOPed. Фиг.6А показывает пути лучей, параллельных оптической оси А, из лучей, излучаемых из центров соответствующих линз оптических систем 20а, 20b формирования изображений. Луч, излучаемый из центра линзы оптической системы 20а формирования изображений, и луч, излучаемый из центра линзы оптической системы 20b формирования изображений, достигают линзы оптической системы 10 объектива, проходят через линзу и становятся лучами, проходящими через фокусную точку F оптической системы 10 объектива. Затем после прохождения через фокусную точку F лучи соответственно проходят через два эффективных зрачка ЕР и перемещаются по направлению к объекту съемки S (не показан).
На Фиг.6В изображен фрагмент, представляющий собой только часть, необходимую для получения позиций эффективных зрачков по оптической оси, из информации, показанной на Фиг.6А. На чертеже показаны два треугольника, имеющие сходные друг с другом формы. Один представляет собой больший заштрихованный треугольник, нижняя сторона которого является MOPd оптической системы формирования изображений, а высота представляет собой фокусное расстояние оптической системы объектива. Другой является заштрихованным меньшим треугольником, нижняя сторона которого представляет собой эффективное MOPed, a высотой является расстояние между фокусной точкой F и эффективным зрачком ЕР (здесь, именуемое "позицией эффективного зрачка EPd"). Эти два треугольника имеют сходные друг с другом формы, и они выражаются следующими уравнениями вследствие их свойства.
Эффективное MOPed: MOPd оптической системы формирования изображений = позиция эффективного зрачка EPd: фокусное расстояние f оптической системы объектива
Следовательно,
ed×f=d×EPd и
EPd=(ed×f)/d… вычисляют Уравнение (3).
Далее примеры формирования эффективного MOPed согласно устройству 1 формирования стереоскопических изображений настоящего варианта осуществления будут разъяснены со ссылкой на Фиг.7А-9С. Эффективное MOPed может быть вычислено с помощью вышеописанного уравнения 1. То есть изменением фокусного расстояния f оптической системы объектива, расстояния L и MOPd оптической системы формирования изображений, эффективное MOPed может быть изменено. То есть, изменением этих параметров можно реализовать эффективное MOPed, имеющее произвольно выбранную длину.
Фиг.7А-7С показывают примеры, когда ширина (длина) эффективного MOPed изменяется изменением MOPd оптической системы формирования изображений (расстояние между соответствующими линзами оптических систем 20а, 20b формирования изображений). Аналогичные обозначения присвоены частям, соответствующим тем, что показаны на Фиг.2, и их подробное разъяснение опущено. Фиг.7А показывает пример, когда MOPd оптической системы формирования изображений задано более узким (по отношению к ширине, показанной на Фиг.1-6В), а Фиг.7В показывает пример, когда MOPd оптической системы формирования изображений выполнено более широким, чем показанное на Фиг.7А. Фиг.7С показывает пример, когда MOPd оптической системы формирования изображений выполнено более широким, чем показанное на Фиг.7В. Как показано на Фиг.7А-7С, известно, что чем шире MOPd оптической системы формирования изображений, тем шире эффективное MOPed.
Фиг.8А-8С показывают примеры, когда ширина эффективного MOPed изменяется изменением расстояния L (расстояние от задней главной точки rH10 оптической системы 10 объектива до задней главной точки fH20a (fH20b) оптической системы 20а (20b) формирования изображений). Аналогичные обозначения присвоены частям, соответствующим тем, что показаны на Фиг.2, и их подробное разъяснение будет опущено. Фиг.8А показывает пример, когда расстояние L выполнено более широким, а Фиг.8В показывает пример, когда расстояние L выполнено более коротким, чем показанное на Фиг.8А. Более того, Фиг.8С показывает пример, когда расстояние L выполнено более коротким, чем показанное на Фиг.8В. Как показано на Фиг.8А-8С, известно, что чем короче расстояние L, тем шире эффективное MOPed.
Следует отметить, что как показано на Фиг.8С, заданием расстояния L (и фокусного расстояния f) для удовлетворения f/(L-f)>1, эффективное MOPed может быть выполнено более широким, чем MOPd оптической системы формирования изображений. Например, фокусное расстояние f оптической системы 10 объектива равно 70 мм, расстояние L равно 105 мм и MOPd оптической системы формирования изображений равно 60 мм. В случае данной конфигурации MOPd оптической системы формирования изображений в вышеописанном уравнении 1 вычисляют равным 120 мм. То есть, по сравнению с MOPd оптической системы формирования изображений (60 мм), полученного в зависимости от позиций размещения оптических систем 20а и 20b формирования изображений, эффективное MOPed может быть выполнено более длинным в число раз, равное f/(L-f).
Фиг.9А-9С показывают примеры, когда эффективное MOPed изменяют изменением фокусного расстояния f оптической системы 10 объектива. Фокусное расстояние f может изменяться использованием линз с различными фокусными расстояниями f и использованием линз с изменением фокусного расстояния. На Фиг.9А-9С аналогичные обозначения присвоены частям, соответствующим тем, что показаны на Фиг.2, и их подробное разъяснение будет опущено. Фиг.9А показывает пример, когда фокусное расстояние f выполнено более узким, а Фиг.9В показывает пример, когда фокусное расстояние f выполнено более длинным, чем показанное на Фиг.9А. Более того, Фиг.9С показывает пример, когда фокусное расстояние f выполнено более длинным, чем показанное на Фиг.9В. Как показано на Фиг.9А-9С, известно, что чем длиннее фокусное расстояние f линзы оптической системы 10 объектива, тем шире эффективное MOPed.
Как описано выше, в соответствии с устройством 1 формирования стереоскопических изображений данного варианта осуществления, выбором фокусного расстояния f оптической системы 10 объектива, параметра (расстояния L), относящегося к позициям оптических систем 20а, 20b формирования изображений и MOPd оптической системы формирования изображений, может быть выбрано значительное МОР устройства 1 формирования стереоскопических изображений. Следовательно, степень свободы конструирования устройства 1 формирования стереоскопических изображений может быть улучшена.
Далее, заданием фокусному расстоянию f линзы оптической системы 10 объектива и расстоянию L значений, которые удовлетворяют уравнению 2, значительное МОР (эффективное MOPed) может быть короче, чем действительное МОР (MOPd оптической системы формирования изображений), установленное в зависимости от позиций размещения оптических систем 20а и 20b формирования изображений. Следовательно, диапазон параллакса в пределах одного экрана может быть ограничен в пределах заданного диапазона. Следовательно, содержимое, которое накладывает большие нагрузки на наблюдателей, такое как содержимое, имеющее большие объемы всплывания и глубины на экране, и содержимое с параллаксом, которое в значительной степени изменяется в то время, когда не сняты изменения обстановки. Таким образом, дискомфорт напряжения зрения и типичная усталость, которую ощущают наблюдатели, просматривающие содержимое, может уменьшаться. Более того, может быть легко выполнено важное МОР от 10 мм до 40 мм, которое чаще всего используется, когда производится съемка поблизости.
Кроме того, эффективное MOPed устройства 1 формирования стереоскопических изображений может быть выполнено более коротким без подведения позиций размещения оптических систем 20а и 20b формирования изображений, и таким образом, нет необходимости уменьшать размеры формирователей изображений или присоединять линзы, имеющие меньшие диаметры. То есть, эффективное MOPed устройства 1 формирования стереоскопических изображений может быть выполнено более коротким без ухудшения рабочих характеристик основного корпуса камеры, таких как резкость и восприимчивость. Следовательно, даже в устройствах формирования стереоскопических изображений способом стереопары и интегрированным способом, которыми затруднительно сократить расстояние между линзами, может легко проводиться съемка с более коротким МОР.
Далее заданием фокусного расстояния линзы оптической системы 10 объектива и расстоянию L для удовлетворения f/(L-f)>1, эффективное MOPed может быть выполнено более широким, чем MOPd оптической системы формирования изображений. По данной конфигурации, даже в устройстве, которое может иметь физически только узкое МОР, таком как эндоскоп, например, может быть снято видеоизображение с большими стереоскопическими эффектами.
Более того, эффективный зрачок ЕР, образованный в устройстве 1 формирования стереоскопических изображений, представляет собой точки, в которых проходят все лучи от объекта съемки S по направлению к центрам линз оптических систем 20а, 20b формирования изображений. Соответственно, например, даже когда объект съемки S перемещается от позиции А к позиции В, как показано на Фиг.10, все лучи, излучаемые из позиции объекта съемки S в позиции В и проходящие через центры линзы оптической системы 20а, 20b формирования изображений, проходят через эффективные зрачки ЕР. Таким образом, даже когда объект съемки S является движущимся, могут быть сняты движущиеся изображения, аналогичные изображениям, когда камера размещена в позиции эффективного зрачка EPd. Следовательно, могут быть дополнительно предусмотрены функции движущегося фокуса (позиции фокуса) оптических систем 20а, 20b формирования изображений на желаемую позицию в пределах ограниченного расстояния и его управления. Таким образом, например, фокусными расстояниями двух оптических систем 20а, 20b формирования изображений можно управлять спарено, и съемка может быть выполнена с постоянным фокусом на движущемся объекте съемки S. Выполняя съемку, можно снимать нормальные и естественные видеоизображения, в которых объект съемки S на экране дисплея перемещается вперед и назад к перемещению объекта съемки S.
Кроме того, согласно устройству 1 формирования стереоскопических изображений данного варианта осуществления, в отличие от технологии, показанной в Патентном документе 1, нет необходимости в постоянном совпадении точки схождения и фокуса. Следовательно, точка схождения может регулироваться оптической системой 20а (20b) формирования изображений или оптической системой 10 объектива, фокус может регулироваться оптической системой 20а (20b) формирования изображений или оптической системой 10 объектива, и угол поля зрения объектива может регулироваться оптической системой 20а (20b) формирования изображений или оптической системой 10 объектива. То есть, параметры для съемки могут быть заданы индивидуальным регулированием оптической системы 10 объектива и оптической системы 20а (20b) формирования изображений.
2. Различные модифицированные примеры
В описанном выше варианте осуществления приведена ссылка на пример, в котором предложены две оптические системы формирования изображений, однако, их может быть предложено и больше. Например, как показано на Фиг.11, их может быть предоставлено три, как, например, оптические системы 20а, 20b, 20с формирования изображений. Более того, оптическая система 10 объектива и оптические системы 20а, 20b, 20с формирования изображений могут размещаться так, что оптическая ось А1 оптической системы 10 объектива и соответствующие оптические оси А2а, A2b, А2с оптических систем 20а, 20b, 20с формирования изображений могут существовать в разных плоскостях. По данной конфигурации, может быть получена информация параллакса по вертикали, и, например, может быть выполнена съемка, предполагая, что наблюдатель стереоскопических изображений просматривает изображения в положении лежа или т.п.
Более того, в описанном выше варианте осуществления для разъяснения приведена ссылка на пример, в котором для линзы оптической системы 10 объектива используется собирающая линза, однако, может использоваться рассеивающая линза. Примеры конфигурации, использующей рассеивающую линзу, будут разъяснены со ссылкой на Фиг.12-15В. Фиг.12 показывает пример конфигурации устройства формирования стереоскопических изображений, когда рассеивающая линза используется для оптической системы объектива. На Фиг.12 аналогичные обозначения присвоены частям, соответствующим тем, что показаны на Фиг.2, и их подробное разъяснение будет опущено. В примере, показанном на Фиг.12, рассеивающая линза используется в качестве линзы оптической системы 10а объектива, и фокусное расстояние f образуется ближе к объекту съемки S. Таким образом, эффективные зрачки ЕР образуются между оптической системой 10а объектива и оптической системой 20а формирования изображений и оптической системой 20b формирования изображений.
Фиг.13А и 13В представляют собой схемы для разъяснения принципа формирования эффективных зрачков ЕР между оптической системой 10а объектива и оптическими системами 20а, 20b формирования изображений в устройстве 1а формирования стереоскопических изображений, использующем рассеивающую линзу. На Фиг.13А и 13В аналогичные обозначения присвоены частям, соответствующим тем, что показаны на Фиг.3А и 3В, и их подробное разъяснение будет опущено. В случае, когда рассеивающая линза используется для оптической системы объектива, мнимое изображение V образуется между объектом съемки S и оптической системой 10а объектива. Как в случае, разъясненном со ссылкой на Фиг.3А и 3В, позиция, в которой образуется мнимое изображение V, общепонятна рассмотрением двух лучей из луча, параллельного оптической оси А1, из лучей, излучаемых из определенной точки объекта съемки S, и луча, проходящего через центр линзы оптической системы 10а объектива. Как показано на Фиг.13А, мнимое изображение V образуется в позиции, в которой вспомогательная линия aL, начерченная из точки, в которой луч, параллельный оптической оси А1, сталкивается с линзой оптической системы 10а объектива, по направлению к фокусной точке F оптической системы 10а объектива, пересекается с лучом, проходящим через центр линзы оптической системы 10а объектива.
Фиг.13В показывает пути, по которым перемещаются лучи, излучаемые из центра линзы оптической системы 20b формирования изображений. Действительные лучи, излучаемые из центра линзы оптической системы 20b формирования изображений, перемещаются по направлению к объекту съемки S по путям, показанным сплошными линиями. С другой стороны, видимые лучи, если смотреть из точки обзора на линзе оптической системы 20b формирования изображений, проходят через оптическую систему 10а объектива, и затем перемещаются по направлению к мнимому изображению V по пути, показанному вспомогательными линиями aL, изображенными пунктирными линиями. Далее, видимые лучи естественно проходят через эффективный зрачок ЕР в позиции, расположенной в продолжении вспомогательной линии aL в направлении, противоположном оптической системе 10а объектива. То есть, видеоизображение, образованное на формирователе 202b изображений оптической системы 20b формирования изображений, равно видеоизображению, снятому с использованием эффективного зрачка ЕР в качестве зрачка.
Более того, даже в случае использования рассеивающей линзы, позиции, в которых образуются эффективные зрачки ЕР, могут быть получены рассмотрением луча, параллельного оптической оси А1, из лучей, излучаемых из центра линзы оптической системы 20b формирования изображений, и луча, проходящего через центр линзы для линзы оптической системы 10а объектива. Фиг.14 показывает пути, по которым перемещаются лучи, излучаемые из центра линзы оптической системы 20b формирования изображений. На Фиг.14 аналогичные обозначения присвоены частям, соответствующим тем, что показаны на Фиг.4, и их подробное разъяснение опущено. На Фиг.14 вспомогательная линия aL между фокусной точкой F оптической системы 10α объектива и точкой, в которой луч, параллельный оптической оси А1, сталкивается с линзой оптической системы 10а объектива, показана пунктирной линией. Далее, эффективный зрачок ЕР образуется в позиции, в которой пересекаются луч, излучаемый из центра линзы оптической системы 20b формирования изображений и показанный сплошной линией, и вспомогательная линия aL. Это означает, что если точка излучения света размещается в центре линзы оптической системы 20b формирования изображений, все лучи, излучаемые из точки, проходят через эффективный зрачок ЕР. То есть, эффективный зрачок ЕР представляет собой "тень линзы" или "мнимое изображение" оптической системы 20b формирования изображений.
Фиг.15А и 15В представляют собой схемы для разъяснения способа расчета эффективного MOPed, когда для оптической системы 10а объектива используется рассеивающая линза. На Фиг.15А и 15В аналогичные обозначения присвоены частям, соответствующим тем, что показаны на Фиг.5А и 5В, и их подробное разъяснение опущено. Фиг.15А показывает пути лучей, параллельных оптической оси А1, из лучей от объекта съемки S (не показано) по направлению к центрам линз оптических систем 20а (20b) формирования изображений. Пути, по которым лучи фактически перемещаются, показаны сплошными линиями, и видимые лучи, если смотреть из точек обзора на линзах оптических систем 20а и 20b формирования изображений, показаны пунктирными линиями. Далее, лучи, параллельные оптической оси А1, показанные сплошными линиями, и видимые лучи, показанные пунктирными линиями, сталкиваются с оптической системой 10а объектива, и затем пересекаются в двух точках. Расстояние между двумя точками представляет собой эффективное MOPed.
На Фиг.15В изображен фрагмент, представляющий собой только часть характеристики, необходимую для получения эффективного MOPed, из информации, показанной на Фиг.15А. На чертеже показаны два треугольника, имеющие сходные друг с другом формы. Один представляет собой больший заштрихованный треугольник, нижняя сторона которого является MOPd оптической системы формирования изображений в виде расстояния между соответствующими линзами оптических систем 20а, 20b формирования изображений, а высота - результатом операции (фокусное расстояние f оптической системы объектива + расстояние L). Другой является заштрихованным меньшим треугольником, нижняя сторона которого представляет собой эффективное MOPed, а высотой является фокусное расстояние f оптической системы 10 объектива. Эти два треугольника имеют сходные друг с другом формы, и они выражаются следующим уравнением 4 вследствие их свойства.
Эффективное MOPed: MOPd оптической системы формирования изображений = фокусное расстояние f оптической системы объектива: расстояние L + фокусное расстояние f оптической системы объектива.
Более того, так как фокусное расстояние f, когда используется рассеивающая линза, является отрицательным (f<0),
ed×(L+(-f))=f×d и
ed=|f/(L-f)|×d… вычисляют Уравнение (4).
To есть и в случае использования собирающей линзы, и в случае использования рассеивающей линзы для линзы оптической системы 10 объектива, эффективное MOPed может быть вычислено с использованием уравнения 4. Более того, и в случае использования собирающей линзы, и в случае использования рассеивающей линзы для линзы оптической системы 10 объектива, заданием фокусного расстояния f оптической системы 10 объектива и расстояния L для удовлетворения следующему уравнению 5, эффективное MOPed может быть выполнено более коротким, чем действительная оптическая система MOPd формирования изображений.
|f/(L-f)|≤1… (Уравнение 5)
Таким образом, даже когда рассеивающая линза используется для линзы оптической системы 10 объектива, может быть получено преимущество, аналогичное тому, когда используется собирающая линза. Более того, когда используется рассеивающая линза, так как фокусное расстояние f является отрицательным по сравнению со случаем, когда используется собирающая линза, расстояние L, необходимое для осуществления аналогичного эффективного MOPed для аналогичного фокусного расстояния |f| и аналогичного MOPd оптической системы формирования изображений как те, когда используется собирающая линза, может быть выполнено более коротким. Следовательно, устройство 1а формирования стереоскопических изображений может быть сформировано меньшим.
Настоящее изобретение содержит объект, связанный с объектом, раскрытым в приоритетной заявке на патент Японии JP 2010-219644, зарегистрированной в Патентном Бюро Японии 10 ноября 2010 года, полное содержание которой включено в настоящую заявку путем ссылки на нее.
Специалистам должно быть понятно, что различные модификации, комбинации, подкомбинации и изменения могут иметь место в зависимости от требований к дизайну и других факторов в объеме приложенной формулы изобретения или ее эквивалентов.

Устройство формирования стереоскопических изображений содержит объектив формирования изображения объекта в виде действительного изображения или мнимого изображения, а также множество оптических систем формирования изображений, которые формируют множество световых потоков объекта от съемки, выходящих по разным путям из оптической системы объектива, далее в виде изображений с параллаксом, используя множество независимых оптических систем. При этом значения фокусного расстояния объектива и расстояния (L) от задней главной точки оптической системы объектива до передней главной точки оптической системы формирования изображений установлены такими, чтобы они удовлетворяли соотношению: |f/(L-f)|≤1, где значение фокусного расстояния является положительным, когда оптическая система объектива формирует изображение объекта в виде действительного изображения, и значение фокусного расстояния является отрицательным, когда оптическая система объектива формирует изображение объекта в виде мнимого изображения. Технический результат - сохранение качества изображений при стереоскопической съемке, когда объект съемки и устройство формирования изображения расположены на конечном расстоянии. 1 з.п. ф-лы, 26 ил.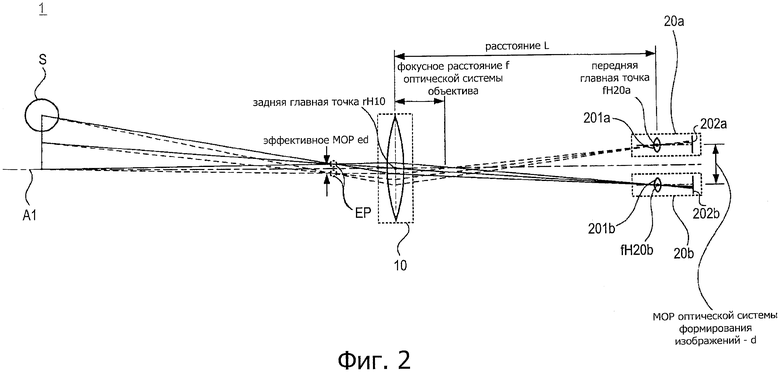
1. Устройство формирования стереоскопических изображений, содержащее:
оптическую систему объектива, выполненную с возможностью формирования изображения объекта съемки в виде действительного изображения или мнимого изображения; и
множество оптических систем формирования изображений, выполненных с возможностью формирования, с использованием множества независимых оптических систем, множества световых потоков от объекта съемки, выходящих по разным путям из оптической системы объектива, в виде изображений с параллаксом,
при этом значения фокусного расстояния (f) оптической системы объектива и расстояния (L) от задней главной точки оптической системы объектива до передней главной точки оптической системы формирования изображений установлены такими, чтобы они удовлетворяли соотношению: |f/(L-f)|≤1, где значение фокусного расстояния является положительным, когда оптическая система объектива формирует изображение объекта съемки в виде действительного изображения, и значение фокусного расстояния является отрицательным, когда оптическая система объектива формирует изображение объекта съемки в виде мнимого изображения,
при этом указанное устройство выполнено с возможностью изменения и управления позицией фокуса оптических систем в пределах ограниченного расстояния таким образом, чтобы съемка выполнялась с постоянным фокусом на движущемся объекте съемки.
2. Устройство формирования изображений по п.1, в котором оптическая система объектива и оптические системы формирования изображений размещены так, что их оптические оси расположены в одной и той же плоскости.
| US 20100259600 A1 14.10.2010 | |||
| Н.П | |||
| Заказнов и др., Теория оптических систем, "Машиностроение", 1992 | |||
| JP 2003005313 A 08.01.2008 | |||
| JP 2006053351 A 23.02.2006 | |||
| US 7768702 B2 03.08.2010 |

