Изобретение относится к области деревообработки, в частности к конструкции лесопильных рам и может быть использовано в лесопильной промышленности при раскрое пиловочника на пиломатериалы.
Из уровня техники известна лесопильная рама, содержащая станину, привод, кривошипно-шатунный механизм, пильную рамку с пилами, установленную в рычагах, и механизма качания пильной рамки, в котором дополнительный кривошипно-шатунный механизм связан с коленчатым валом механизма резания с помощью зубчатой передачи с передаточным отношением 2:1, а шатун кривошипно-шатунного механизма кинематически шарнирно соединен с рычагами пильной рамки посредством двуплечих рычагов [1].
Такой вариант технического решения лесопильной рамы достаточно прост в конструктивном исполнении и обеспечивает качание пил по самопересекающейся замкнутой кривой типа восьмерки. Однако ось симметрии этой траектории движения пильной рамки представляет собой дугу окружности, описываемую одним из шарниров рычажной подвески пильной рамки. В связи с этим изменяются условия пиления (работы пил) во время перемещения пильной рамки на протяжении всего рабочего хода (px). К тому же при движении пильной рамки по дуге окружности возникают центробежные силы, которые оказывают отрицательно влияние, прежде всего, на шарнирные соединения. Кроме того для качания пильной рамки используется дополнительный кривошипно-шатунный механизм и двуплечие рычаги. Дополнительный кривошипно-шатунный механизм передает возвратно-качательное движение двуплечим рычагам, а последние затем качают рычаги и пильную рамку. Такое техническое решение усложняет конструкцию.
Известна также лесопильная рама, содержащая станину, привод, кривошипно-шатунный механизм, пильную рамку с пилами, установленную на двуплечие рычаги шарнирно-рычажных четырехзвенных механизмов и механизм качания пильной рамки, выполненный в виде антипараллелограмма, кривошип которого совмещен с кривошипом механизма возвратно-поступательного движения пилой рамки, а шатун посредством тяги связан с одним из двуплечих рычагов шарнирно-рычажных четырехзвенных механизмов [2].
В данной лесопильной раме получить хорошие условия пиления можно с определенным приближением и только для малых лесопильных рам с ходом пил (Н) до 250 мм, хотя пильная рамка перемещается по самопересекающейся замкнутой кривой типа восьмерки, ось симметрии которой приближается к прямой вертикальной линии. Для лесопильных рам с ходом пил (Н) свыше 300 мм требуется механизм качания больших размеров, в которых полную синхронизацию главного движения и движения подачи обеспечить невозможно.
К недостаткам этого технического решения лесопильной рамы относится также сложность конструкции, в которой имеется большое число шарнирных соединений, тяг, кривошипов и рычагов. В этой конструкции лесопильной рамы для качания пил по самопересекающейся замкнутой кривой типа восьмерки используется специальный механизм в виде антипараллелограмма, который кинематически связан посредством тяг с шарнирно-рычажными четырехзвенными механизмами, в которые установлена пильная рамка. Такое техническое решение представляет собой сложную конструкцию. Добиться полной синхронизации механизмов резания и подачи, используя антипараллелограмм, не представляется возможным. К тому же такие механизмы, совершая возвратно-поступательное перемещение, создают силы инерции, которые уравновесить довольно трудно.
Синхронизация в аналоге достигается за счет определения перемещения точки антипараллелограмма, а также размеров и положений рычагов механизма качания, обеспечивающих движение пильной рамки по самопересекающейся замкнутой кривой типа восьмерки. Безусловно, этот расчет можно выполнить с определенной точностью. Так как механизм резания имеет большие размеры, то и точность синхронизации этих движений невысокая.
Технический результат изобретения заключается в упрощении конструкции и повышении точности синхронизация главного движения и движения подачи путем качания пильной рамки за счет применения эксцентриковых механизмов, позволяющих обеспечить размах качания пильной рамки любой величины.
Технический результат достигается тем, что на промежуточный вал механизма качания пильной рамки установлены эксцентрики, которые шарнирно соединены с задними крайними рычагами шарнирно-рычажных четырехзвенных механизмов, причем, когда пильная рамка находится в начале рабочего хода, эксцентриситет эксцентрика занимает крайнее нижнее положение, а вращение эксцентрика направлено против вектора скорости подачи (Vs) и совпадает с направлением вращения коленчатого вала привода пильной рамки.
На фиг.1 изображена принципиальная схема лесопильной рамы; на фиг.2 - вид А на фиг.1; на фиг.3 представлены положения крайнего рычага 9 шарнирно-рычажного четырехзвенного механизма Уатта и траектория движения пил по замкнутой самопересекающейся кривой типа восьмерки.
Лесопильная рама содержит станину, коленчатый вал 1, кривошипы 2, шатун 3, пильную рамку 4 с пилами, верхнюю 5 и нижнюю 6 поперечины пильной рамки, которые установлены на средние рычаги 7 четырехзвенных прямолинейно-направляющих механизмов Уатта. Средние рычаги 7 шарнирно соединены с крайними передними 8 и задними 9 рычагами верхних и нижних механизмов Уатта. Для осуществления качания пильной рамки в горизонтальном направлении используется эксцентрик 10, который установлен на нижнем промежуточном валу 11 и шарнирно соединен с одним из концов крайних задних рычагов 9 механизма Уатта.
Нижний промежуточный вал 11 кинематически связан цепной передачей 12 с коленчатым валом 1 с передаточным отношением 2:1. Верхние задние рычаги 9 кинематически связаны с нижним промежуточным валом 11 цепной передачей 13, которая передает вращение промежуточному валу 14. На валу 14 установлены эксцентрики 15, которые шарнирно соединены с верхними задними рычагами 9 механизма Уатта.
Лесопильная рама работает следующим образом.
Движение от коленчатого вала 1 передается кривошипу 2, шатунам 3 и пильной рамке 4. Одновременно от коленчатого вала с помощью цепной передачи 12 движение передается на нижний промежуточный вал 11. На котором установлены эксцентрики 10, шарнирно соединенные с крайними нижними задними рычагами 9 механизма Уатта. Движение от вала 11 передается цепной передачей 13 на верхний промежуточный вал 14, на котором установлены эксцентрики 15, шарнирно соединенные с верхними задними крайними рычагами 9 механизма Уатта.
Таким образом, пильная рамка перемещается в вертикальной и горизонтальной плоскостях.
Сложение вертикального и горизонтального движения пильной рамки обеспечивает перемещение пил по замкнутой самопересекающейся кривой типа восьмерки (фиг.3), которая позволяет исключить скольжение зубьями пилы дна пропила в начале холостого хода (xx) пил и ликвидировать максимальные значения подачи на зуб во время рабочего хода (px).
Для повышения технического уровня лесопильной рамы используются следующие способы синхронизации главного движения и движение подачи путем:
- качания пильной рамки,
- перемещения заготовки с переменной скоростью подачи (Vs).
В данном техническом решении рассматривается синхронизация этих движений путем качания пильной рамки.
Важным аспектом таких лесопильных рам с качанием пильной рамки является синхронизация этих движений (фиг.3). В начальный период рабочего хода пильной рамки, когда пилы находятся в верхней мертвой точке (ВМТ), пилы необходимо отводить от дна пропила, так как скорость движения пил небольшая и таким образом будет осуществляться выравнивание толщины срезаемого слоя древесины зубом пилы. Примерно в середине первой половины хода пильной рамки пилы необходимо надвигать на распиливаемую заготовку, так как скорость пил возросла и продолжает возрастать, и, следовательно, можно увеличивать подачу на зуб пилы. Этот этап завершается примерно в третьей четверти хода пил. В последней четверти хода пильной рамки пилы снова необходимо отводить от дна пропила и тем самым обеспечивать выравнивание толщины срезаемого слоя. В начале холостого хода, когда пилы находятся в нижней мертвой точке (НМТ), необходимо продолжить отвод пил от заготовки, чтобы исключить скобление зубьями пилы дна пропила, так как скорость движения пил в этот период небольшая. Следует иметь ввиду, что скорость движения пил возрастает по мере движения пильной рамки вверх, а затем уменьшается. Поэтому начиная с середины и до конца холостого хода пилы необходимо возвратить в исходное верхнее крайнее положение (ВМТ), исключая их взаимодействие с заготовкой.
Поэтому синхронизацию движения пил можно достигнуть в том случае, когда эксцентриситет эксцентрика 10 должен находиться в нижнем крайнем положении (точка Г). При повороте эксцентрика из точки Г в точку Д другая крайняя точка А рычага 9 займет положение Б. При дальнейшем повороте эксцентрика из точки Д в точку Г крайняя точка А рычага 9 переместиться в точку В. Во время холостого хода (xx) эта точка В рычага 9 переместиться сначала в точку Д, заняв положение БД, а затем в точку А, заняв положение АГ.
Таким образом при повороте кривошипа 2 привода пильной рамки на 360 градусов эксцентрик 10 совершает поворот на 720 градусов, т.е эксцентрик вращается в два раза быстрее, чем кривошип привода пильной рамки. Только в этом случае будет обеспечиваться синхронизация главного движения и движения подачи, позволяющая оптимизировать процесс пиления древесины рамными пилами.
Следовательно, когда пильная рамка 4 занимает верхнее крайнее положение (ВМТ), эксцентриситет эксцентрика 10 должен находиться в крайнем нижнем положении (точка Г, фиг.3) и рычаг 9 должен занимать положение АГ. В начале рабочего хода (px) пильной рамки перемещение эксцентрика 10 необходимо осуществлять против часовой стрелки, и только в этом случае пилы будут отводиться от дна пропила и будет наблюдаться выравнивание толщины срезаемого слоя в начале рабочего хода пил.
На современных лесопильных рамах с кривошипно-шатунным механизмом привода пильной рамки вращение коленчатого вала за рабочий ход направлено против вектора скорости подачи. Это объясняется тем, что динамические нагрузки на ползуны и направляющие (или шарниры) пильной рамки уменьшаются во время рабочего хода. Следовательно, если эксцентрик в начале рабочего хода необходимо вращать против вектора скорости подачи, то и вращение коленчатого вала должно совпадать с направлением вращения эксцентрика.
Таким образом, такое сочетание движений обеспечивает не только синхронизацию главного движения и движения подачи, но и создает оптимальные условия работы механизма резания лесопильной рамы.
Величина эксцентриситета (смещения) эксцентрика (r) определяется по обычным методикам с учетом радиуса кривошипа привода пильной рамки (R), величины подачи заготовки на оборот коленчатого вала (S0), шага зубьев пил (t3) и величины передаточных отношений рычажной подвески пильной рамки.
Предлагаемое техническое решение позволяет повысить точность синхронизации главного движения и движения подачи и тем самым обеспечить оптимальные условия пиления. Это достигается тем, что уравнения движения пил по вертикали совпадают с уравнениями качания пильной рамки (уравнения вращения кривошипа и эксцентрика идентичны).
Кроме того предлагаемое техническое решение позволяет также упростить конструкции лесопильных рам с качанием пил и тем самым снизить себестоимость изготовления их, а также повысить надежность и долговечность, так как эксцентриковые механизмы не только просты в изготовлении, но надежны и долговечны при эксплуатации.
Источники информации
1. Авторское свидетельство №1055640 от 22.07.1983. «Механизм резания лесопильной рамы», заявка №3448416, приоритет: 03.06.1982.
2. Авторское свидетельство №1129071 от 15.08.1984. «Лесопильная рама», заявка №3530729, приоритет: 24.12.1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕСОПИЛЬНАЯ РАМА | 2014 |
|
RU2557181C1 |
| Лесопильная рама | 1982 |
|
SU1129071A1 |
| Лесопильная рама | 1985 |
|
SU1308469A1 |
| Механизм резания лесопильной рамы | 1982 |
|
SU1068282A1 |
| Лесопильная рама (ее варианты) | 1983 |
|
SU1140947A1 |
| Лесопильная рама | 1983 |
|
SU1133087A1 |
| ЛЕСОПИЛЬНАЯ РАМА | 1997 |
|
RU2128578C1 |
| МЕХАНИЗМ РЕЗАНИЯ ЛЕСОПИЛЬНОЙ РАМЫ | 1992 |
|
RU2036079C1 |
| Лесопильная рама | 1985 |
|
SU1380942A1 |
| ЛЕСОПИЛЬНАЯ РАМА | 2006 |
|
RU2329887C2 |
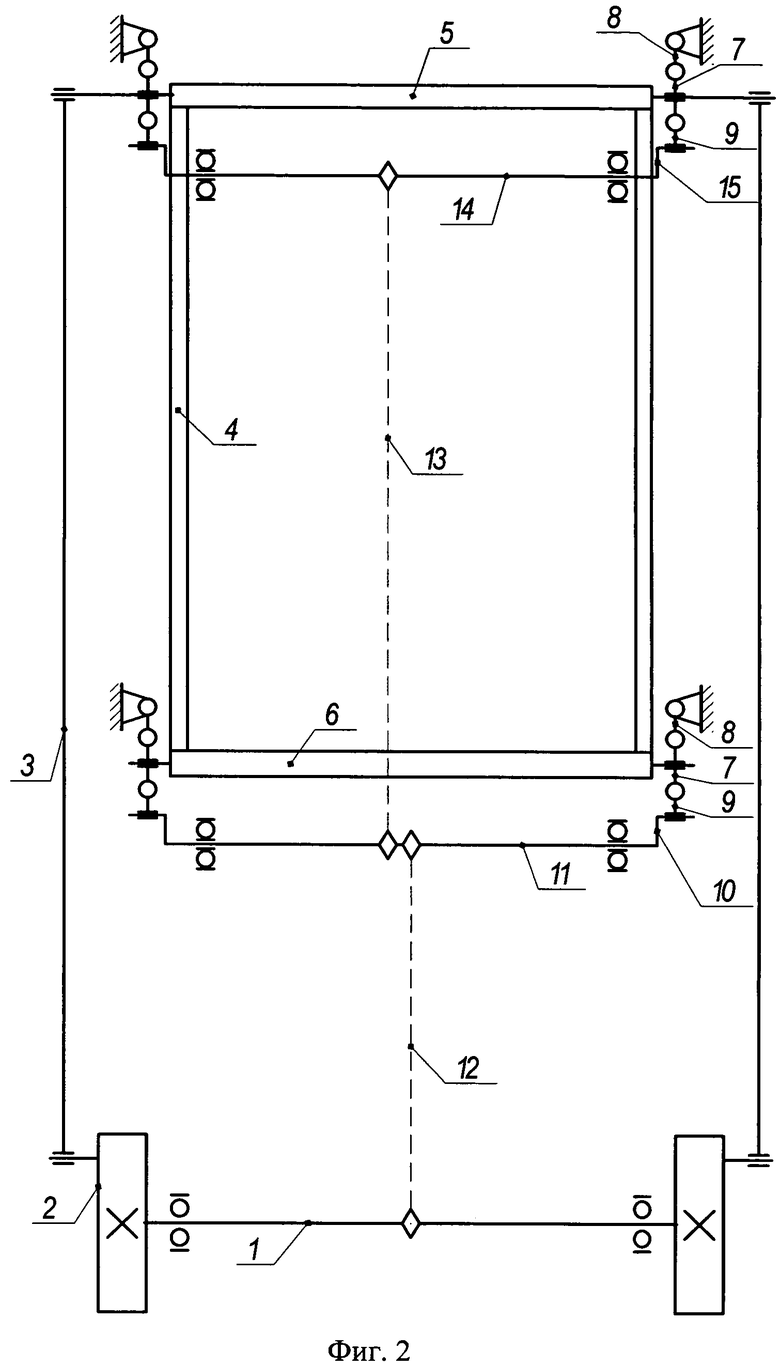

Изобретение относится к деревообрабатывающей промышленности, в частности к конструкции лесопильных рам. Лесопильная рама содержит станину, коленчатый вал (1), кривошипы (2), шатун (3), пильную рамку (4) с пилами, верхнюю (5) и нижнюю (6) поперечины пильной рамки, которые установлены на средние рычаги (7) четырехзвенных прямолинейно-направляющих механизмов Уатта. Средние рычаги шарнирно соединены с крайними передними (8) и задними (9) рычагами верхних и нижних механизмов Уатта. Для осуществления качания пильной рамки в горизонтальном направлении используется эксцентрик (10), который установлен на нижнем промежуточном валу (11) и шарнирно соединен с одним из концов крайних задних рычагов механизма Уатта. Нижний промежуточный вал кинематически связан цепной передачей (12) с коленчатым валом с передаточным отношением 2:1. Верхние задние рычаги кинематически связаны с нижним промежуточным валом цепной передачей (13), которая передает вращение промежуточному валу (14). На промежуточном валу установлены эксцентрики (15), которые шарнирно соединены с верхними задними рычагами механизма Уатта. Когда пильная рамка находится в начале рабочего хода, эксцентриситет эксцентрика занимает крайнее нижнее положение, а вращение эксцентрика направлено против вектора скорости подачи и совпадает с направлением вращения коленчатого вала привода пильной рамки. Упрощается конструкция лесопильной рамы, повышается точность синхронизации механизмов резания и подачи. 3 ил.
Лесопильная рама, содержащая станину, привод, кривошипно-шатунный механизм, пильную рамку с пилами, установленную на двуплечие рычаги шарнирно-рычажных четырехзвенных механизмов и механизм качания пильной рамки, в котором промежуточный вал связан с коленчатым валом привода пильной рамки посредством механических передач с передаточным отношением 2:1 и кинематически соединен шарнирами крайних рычагов четырехзвенных механизмов посредством цепных передач и эксцентриковых валов, отличающаяся тем, что на промежуточный вал механизма качания пильной рамки установлены эксцентрики, которые шарнирно соединены с задними крайними рычагами шарнирно-рычажных четырехзвенных механизмов, причем, когда пильная рамка находится в начале рабочего хода, эксцентриситет эксцентрика занимает крайнее нижнее положение, а вращение эксцентрика направлено против вектора скорости подачи и совпадает с направлением вращения коленчатого вала привода пильной рамки.
| Лесопильная рама | 1982 |
|
SU1129071A1 |
| Механизм резания лесопильной рамы | 1982 |
|
SU1055640A1 |
| Лесопильная рама (ее варианты) | 1983 |
|
SU1140947A1 |
| 1972 |
|
SU412958A1 | |
| Буровая коронка | 1979 |
|
SU825914A1 |

