УРОВЕНЬ ТЕХНИКИ
По настоящей заявке испрашивается приоритет по предварительной патентной заявке США с серийным №61/393298 и предварительной патентной заявки США с серийным №61/393321, обе зарегистрированы 14 октября 2010 года, содержание которых таким образом включено по ссылке, как полностью процитированное в данном документе для любых целей.
Инновации, раскрытые в материалах настоящей заявки, относятся к системам с интерферометрами и более конкретно, но не исключительно, к оптоволоконным системам с интерферометрами, таким как, например, системы, используемые в приложениях по безопасности, наблюдению и мониторингу. Некоторые раскрытые системы с интерферометрами относятся к обнаружению и определению местоположения помех (например, помехи для периметра безопасности, например, «разрез» ограждения, утечка из магистрали, изменение структурной целостности здания, помехи линии связи, изменение в работе конвейерной ленты, воздействие на поверхность либо акустический шум среди прочего) с одним либо более пассивными датчиками.
Более ранние попытки использования систем на основе интерферометров для обнаружения помех были осуществлены с разной степенью успеха. Например, интерферометр Маха-Цендера может обнаруживать сдвиг фазы между двумя лучами света, отделенными от единственного коллимированного пучка. Когда две соответствующие длины оптического пути отличаются, соответствующие пучки типично выходят из фазы и интерферометр Маха-Цендера может обнаруживать подобное различие фаз. Таким образом, интерферометр Маха-Цендера может обнаруживать изменение в относительных длинах оптических путей, которое может иметь место, когда одна пара оптических каналов, передающих оптические сигналы, возмущена иначе, чем другая пара. интерферометр Маха-Цендера сам по себе, не сможет обеспечить обнаружение подобных помех либо магнитуду разницы в длинах путей.
Предложены системы, включающие в себя интерферометры, сконфигурированные для обнаружения помех. Например, патент США под №6778717 раскрывает способ, который включает в себя запуск света в противоположных направлениях через единственный интерферометр Маха-Цендера для создания противонаправленных оптических сигналов, которые могут быть модифицированы с помощью возмущения интерферометра (также упоминаемое как «помеха» либо как «событие»). Патент под №717 раскрывает, что положение такого события может быть определено с помощью, главным образом, продолжительного и одновременного отслеживания относительно модифицированных противонаправленных оптических сигналов и определения временной разницы между отдельно обнаруженными модифицированными сигналами. Раскрытие патента №′717 полностью включено в материалы настоящей заявки по ссылке.
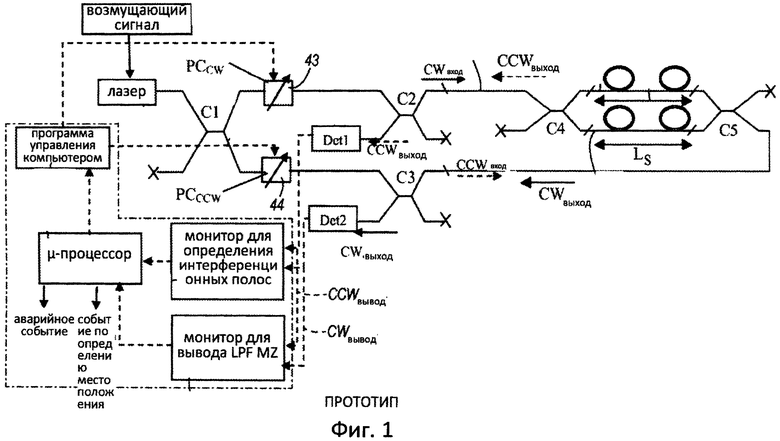
Патенты США под №7499176 и 7499177 раскрывают улучшения для технологии, раскрытой в патенте США под №6778717. Патенты под №′176 и ′177 направлены на способы и устройство для активного управления состояниями поляризации противонаправленных оптических сигналов, проходящих через интерферометр Маха-Цендера, так, чтобы соответствовать фазе и/или амплитуде между противонаправленными сигналами. По технологии, раскрытой в патенте США №6778717, необходимы, главным образом, соответствующие состояния поляризации для корреляции выхода, соответствующего каждому из противонаправленных сигналов, в другие соответствующие выходы сигнала. Подобный интерферометр показан схематично на фиг.1. Раскрытие в патентах №′176 и ′177 полностью включено в материалы настоящей заявки по ссылке.
Для активного управления состояниями поляризации противонаправленных сигналов необходим контроллер поляризации в каждом входе световых путей интерферометра Маха-Цендера. Подобные контроллеры поляризации, которые обеспечивают соответствующую поляризацию, являются затратными. Кроме того, так как, по меньшей мере, некоторые контроллеры поляризации конфигурируются для настройки состояний поляризации, так чтобы наблюдаемые выходные сигналы не имели между собой никаких амплитудных либо фазовых сдвигов, когда датчик кратковременно возмущен и таким образом, применяется фазовый сдвиг, индуцированный поляризацией, между противонаправленными сигналами, может пройти значительное количество времени после возмущения и до того, как контроллеры поляризации соответствующим образом сопоставили состояния поляризации для обнаружения последовательного возмущения. Следовательно, может пройти значительное количество времени до того, как последующие помехи смогут быть точно обнаружены и их местоположение может быть определено.
Следовательно, системы, как раскрыто в патентах США №7499176, 7499177 и 6778717 страдают от серьезных недостатков. Например, системы по безопасности периметров, включающие в себя подобные системы, можно обойти с помощью использования ложных помех в одном месте и последующего пересечения отслеживаемого периметра в другом месте, на некотором расстоянии от места с ложными помехами, хотя контроллеры поляризации «сброшены» (например, попытка повторно сопоставить состояния поляризации).
Также предложены другие походы для обнаружения помех. Например, патент США №7514670 описывает недорогие системы, у которых есть распределенное множество чувствительных «зон». В частности, патент №′670 раскрывает систему, имеющую оптический канал, сконфигурированный для передачи света, прошедшего чувствительные области и для разделения части света на каждую из чувствительных областей. Каждая из чувствительных областей содержит, например, интерферометр, сконфигурированный для обнаружения помех.
Так как часть входящего пучка света отклоняется в каждую из чувствительных областей (либо зон), подобная система имеет практические ограничения на число зон, которые являются возможными, когда используют указанный источник света. В результате ограничения конкретного числа зон существует также практическое ограничение длины периметра, которая может отслеживаться с помощью подобной системы.
Патент №′670 раскрывает, что присутствие помех может быть изолировано для конкретной зоны, поэтому подобная система может в целом идентифицировать место возникновения помех. подобная зона может охватывать относительно большое расстояние, которое не может предоставить необходимое пространственное разрешение для многочисленных приложений систем безопасности. Например, некоторые приложения систем безопасности требуют, чтобы система идентифицировала место возникновения помех внутри нескольких (например, менее 10) метров (например, внутри области между приблизительно 3 и приблизительно 5 метрами).
Таким образом, остается необходимость в более простых и менее дорогих системах для точного обнаружения существования, положения либо магнитуды помех. Также остается необходимость в системах, которые обеспечивают эти преимущества на расстоянии многих километров. Также остается необходимость в системах, которые могут обнаруживать существование, положение либо магнитуду последующих помех в промежутке менее приблизительно 3 секунд от первоначального события либо помех.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Описаны инновационные системы с интерферометрами, которые охватывают одну либо более из вышеизложенных потребностей. Некоторые варианты осуществления подобных инновационных систем содержат устройство, сконфигурированное для обнаружения помех (иногда называемых «событие» или «мишень») в оптическом канале. В некоторых примерах может быть обнаружено присутствие помех вместе с их местоположением. Некоторые инновационные системы содержат способ для обнаружения подобных помех и их положения. С помощью некоторых вариантов осуществления подобных инновационных систем может быть также определена магнитуда подобных помех. Например, некоторые раскрытые варианты осуществления оптических (например, волоконно-оптических) сенсорных систем предоставляют одно либо более последующих преимуществ на расстояния до более чем почти 50 км от активной схемы, использующей пассивно прерываемые волоконно-оптические датчики.
(1) обнаружение присутствия помех;
(2) обнаружение положения помех; и
(3) обнаружение магнитуды помех.
Некоторые инновационные системы могут предоставлять эти и другие преимущества на расстояния до, например, почти 65 километров (км) с одним пассивным датчиком и до, например, почти 130 км с помощью первого и второго пассивного датчиков, разнесенных в противоположных направлениях.
Эти и другие ранее недостижимые преимущества сделаны возможными, по меньшей мере, частично, с помощью датчика на основе инновационного интерферометра, включающего в себя аспекты датчика Майкельсона с аспектами датчика Маха-Цендера.
В некоторых инновационных системах часть датчика Майкельсона включает в себя первую оптоволоконную часть и вторую оптоволоконную часть. Первый разветвитель-объединитель может быть сконфигурирован для разделения света между первой оптоволоконной частью и второй оптоволоконной частью. Первое устройство сопряжения фазы поляризации может быть сконфигурировано для сопряжения фазы поляризации падающего света, соответствующего первой оптоволоконной части, и второе устройство сопряжения фазы поляризации может быть сконфигурировано для сопряжения фазы поляризации падающего света, соответствующего второй оптоволоконной части. Каждое, первое и второе устройства сопряжения фаз поляризации могут быть сконфигурированы для отражения света в детектор (иногда упоминаемый как «детектор Майкельсона») и через соответствующие первую и вторую оптоволоконные части. Детектор Майкельсона может быть расположен по соседству с соответствующими непосредственными краями первого и второго каналов, и соответствующие устройства сопряжения поляризации фаз могут располагаться по соседству с соответствующими удаленными краями первого и второго каналов.
В некоторых инновационных системах часть датчика Маха-Цендера включает в себя первую оптоволоконную часть и вторую оптоволоконную часть, и первый разветвитель-объединитель, сконфигурированный для разделения входящего света между первой оптоволоконной частью и второй оптоволоконной частью. Объединитель может быть сконфигурирован для объединения части света в первой оптоволоконной части с частью света во второй оптоволоконной части, и третья оптоволоконная часть может быть сконфигурирована для приема света от объединителя и для возбуждения второго детектора (иногда упоминаемого как «детектор Маха-Цендера»). Свет, который проходит через третью часть, может возбуждать второй детектор независимо от света, отраженного первым либо вторым устройством сопряжения поляризации фаз.
В некоторых примерах инновационные системы с интерферометрами также включают в себя скремблер поляризации, сконфигурированный для изменения состояния поляризации света, входящего в первую и вторую оптоволоконные части датчика. Скремблер может периодически (например, выборочно, периодически либо апериодически) изменять поляризацию так, чтобы сохранять соответствующее отношение «сигнал-шум» в детекторе Маха-Цендера (например, с помощью части датчика Маха-Цендера инновационного интерферометра).
Первая оптоволоконная часть и вторая оптоволоконная часть могут расширять в продольном направлении один пассивно прерываемый оптоволоконный кабель. Ближний конец оптоволоконного кабеля может быть сконфигурирован для соединения первого детектора из условия, чтобы часть датчика Майкельсона могла облучать первый детектор. Ближний конец оптоволоконного кабеля может быть сконфигурирован для соединения второго детектора из условия, чтобы часть датчика Маха-Цендера могла облучать второй детектор. Оперативное соединение между частью датчика Майкельсона и частью датчика Маха-Цендера может располагаться по соседству с удаленным концом оптоволоконного кабеля. Соответствующие устройства объединения фаз поляризации могут располагаться по соседству с удаленным концом оптоволоконного кабеля. Подобный пассивно прерываемый оптоволоконный кабель может расширяться до почти 65 км от первого и второго детекторов, например, между приблизительно 40 км и приблизительно 65 км от детекторов. В других примерах пассивно прерываемый оптоволоконный кабель может расширяться между почти 1 км и почти 10 км от, например, первого и второго детекторов. Также возможны другие расстояния, такие как, например, между почти 10 км и почти 20 км, между 20 км и почти 30 км, и между почти 30 км и почти 40 км.
Раскрыты инновационные способы идентификации местоположения помех. Например, свет может быть запущен в интерферометр на основе датчика, у которого есть часть датчика Майкельсона, часть датчика Маха-Цендера и оперативное соединение между ними. Часть датчика Майкельсона может фиксировать комбинированные первую и вторую части сигнала. Часть датчика Маха-Цендера может фиксировать первую часть сигнала. Положение помех может быть определено из сравнения первой части сигнала со второй частью сигнала. Например, первая часть сигнала, фиксируемая частью датчика Маха-Цендера может извлекаться из комбинированных первой и второй частей сигнала, фиксируемого частью датчика Майкельсона.
Магнитуда помех может быть определена, по меньшей мере, частично из фиксируемых первых и вторых частей сигнала, фиксируемых сдвигов фаз между первой частью сигнала и второй частью сигнала либо обеими. Например, может быть определена магнитуда помех, частично, с помощью определенного счета интерференционных полос, определенного объединения наблюдаемого сдвига фаз в течение заданного периода времени либо обоих (например, усреднение соответствующих магнитуд, определяемых из определенного счета интерференционных полос и определенного объединения изменения фаз).
Также раскрыты машиночитаемые носители и компьютерно реализуемые способы. Такие носители могут хранить, определять или другим образом включать исполняемые компьютером инструкции по выполнению вычислительными средами инновационных способов, раскрытых в данном документе. Относящиеся компьютерные среды также раскрыты и могут быть вычислительными средами специального либо общего назначения.
Вышеупомянутые и другие признаки и преимущества станут более явными из последующего подробного описания, которое осуществляется со ссылками на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи показывают аспекты инновационных систем, раскрытых в данном документе, до тех пор, пока конкретно не идентифицировано, что показан известный признак из предыдущего уровня техники.
Фиг.1 показывает схематичную иллюстрацию коммерчески доступного интерферометра Маха-Цендера, сконфигурированного для использования противонаправленных оптических сигналов, имеющих активные сопоставленные состояния поляризации.
Фиг.2 показывает аспекты инновационного интерферометра типа, раскрытого в данном документе.
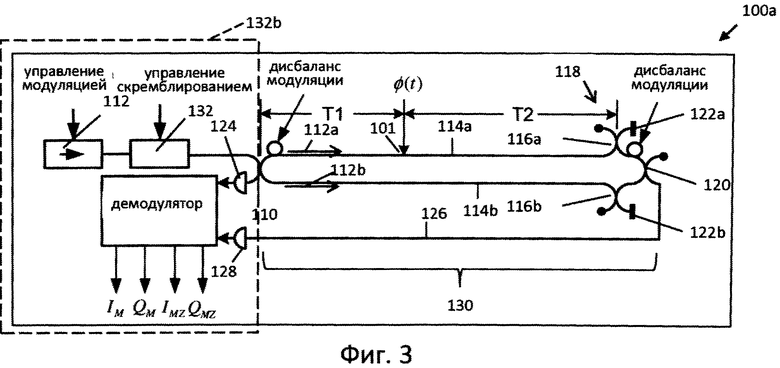
Фиг.3 показывает аспекты системы с инновационным интерферометром типа, раскрытого в данном документе.
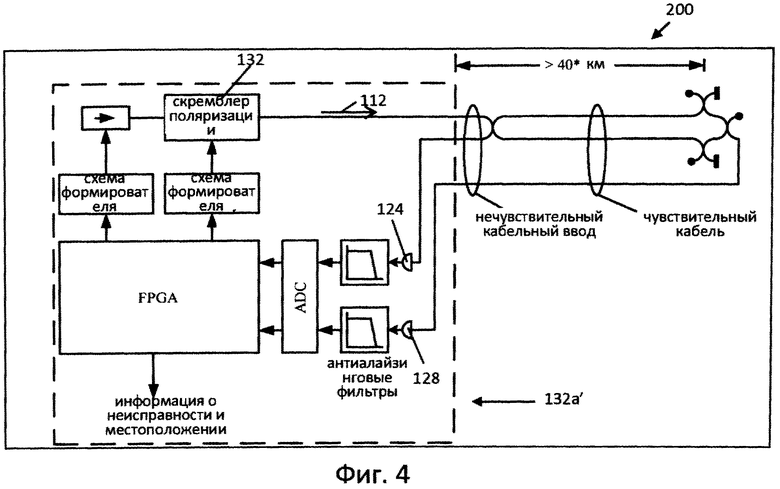
Фиг.4 показывает аспекты инновационного детектора помех, как раскрыто в данном документе.
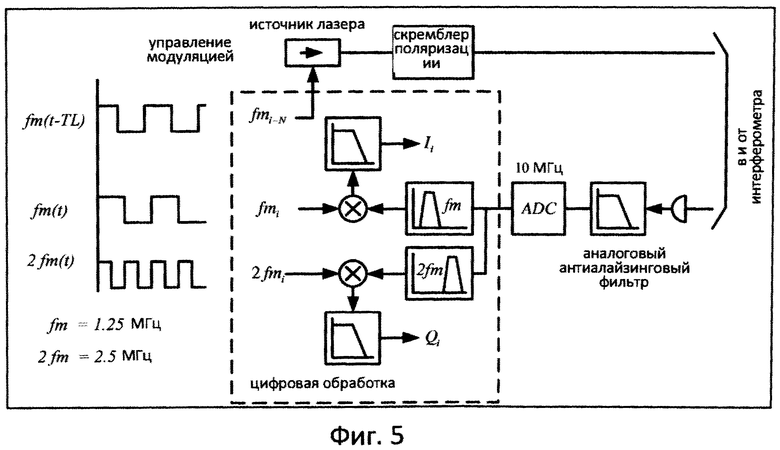
Фиг.5 показывает аспекты цифрового процессора, сконфигурированного для использования с детектором помех, как показано на фиг.4.
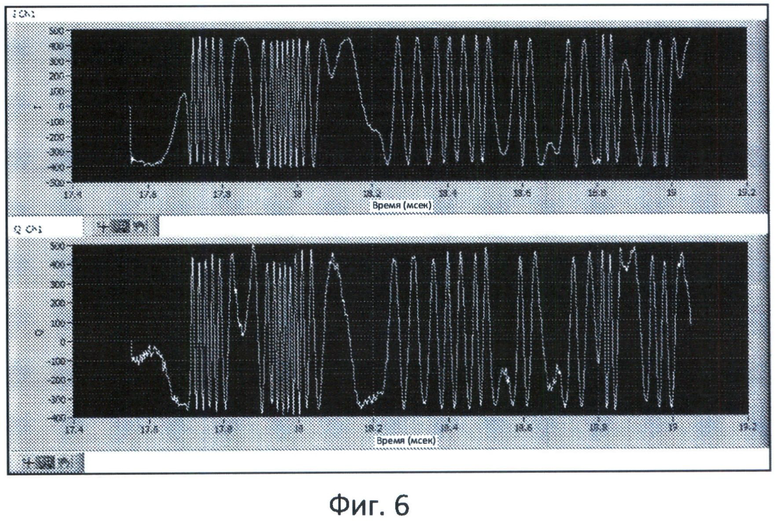
Фиг.6 показывает кривую из двух изменяющихся во времени компонентов выхода первого вектора из рабочего варианта осуществления инновационного интерферометра типа, раскрытого в данном документе.
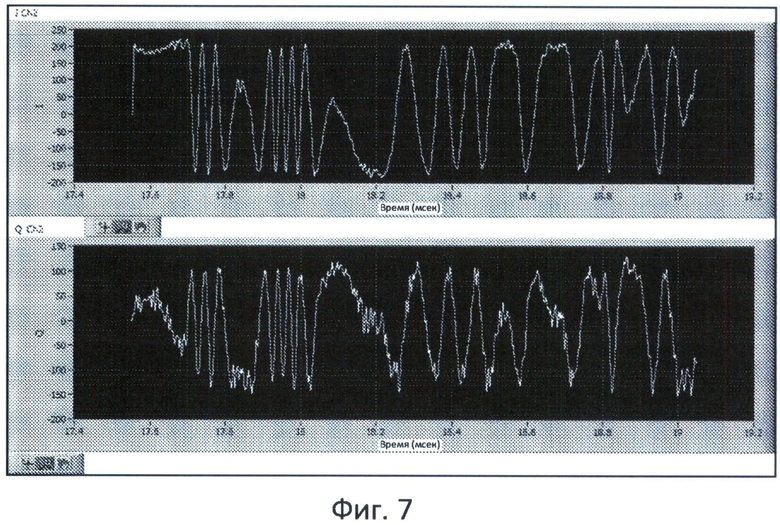
Фиг.7 показывает кривую из двух изменяющихся во времени компонентов выхода второго вектора из рабочего варианта осуществления инновационного интерферометра типа, раскрытого в данном документе.
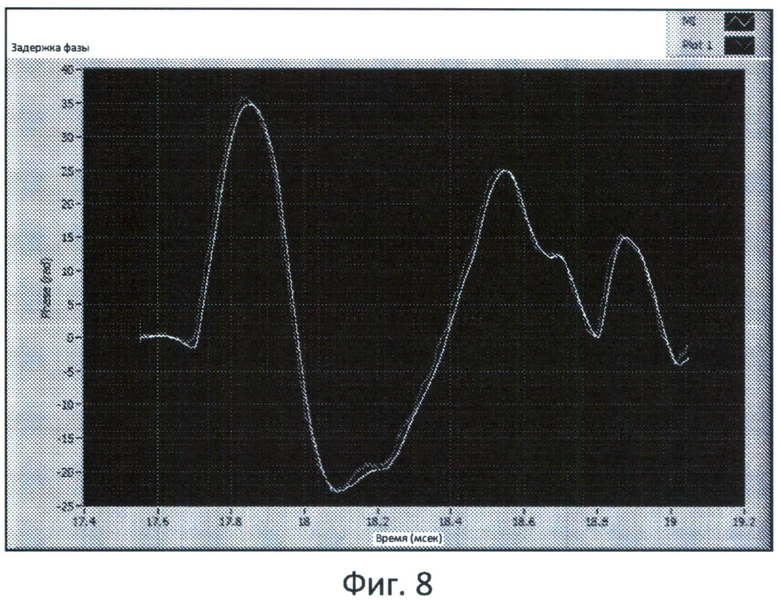
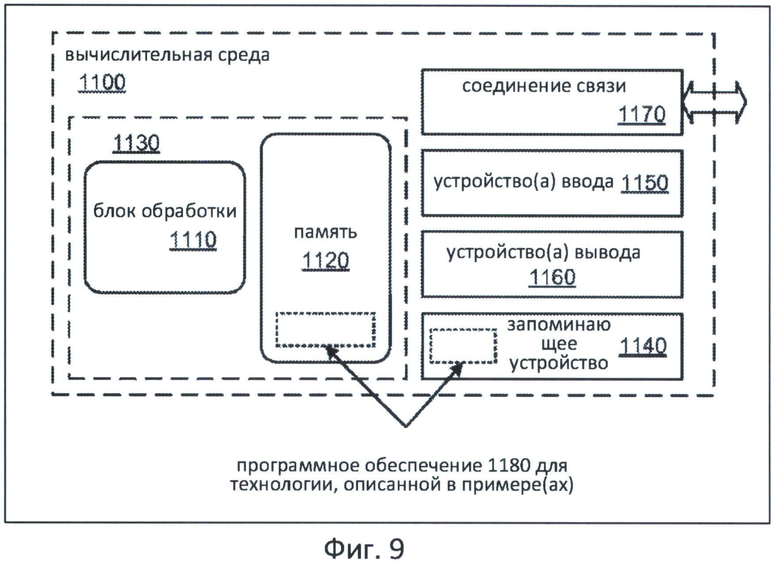
Фиг.8 показывает кривую сдвига общей изменяющейся во времени фазы для каждого выхода первого и второго векторов. Фиг.9 показывает блок-схему вычислительной среды, как раскрыто в данном документе.
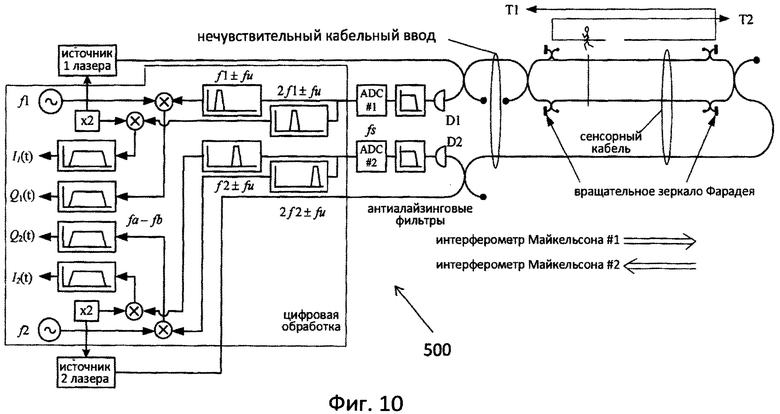
Фиг.10 показывает аспекты альтернативной системы, сконфигурированной для использования источников вторичного света и разделения модуляции для обнаружения присутствия и местоположения помех.
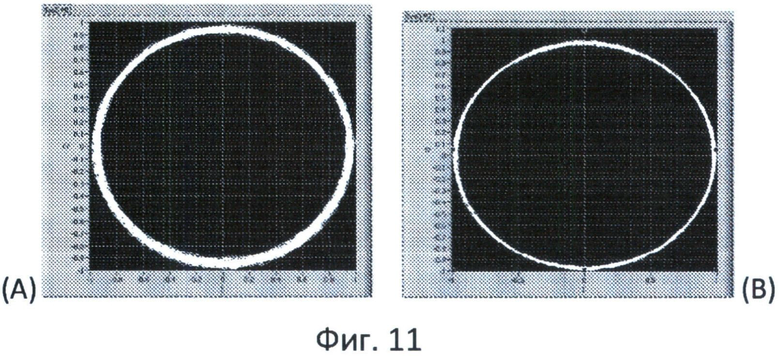
Фиг.11А показывает выход первого вектора, представленного графически в полярных координатах. Фиг.11В показывает выход второго вектора, представленного графически в полярных координатах.
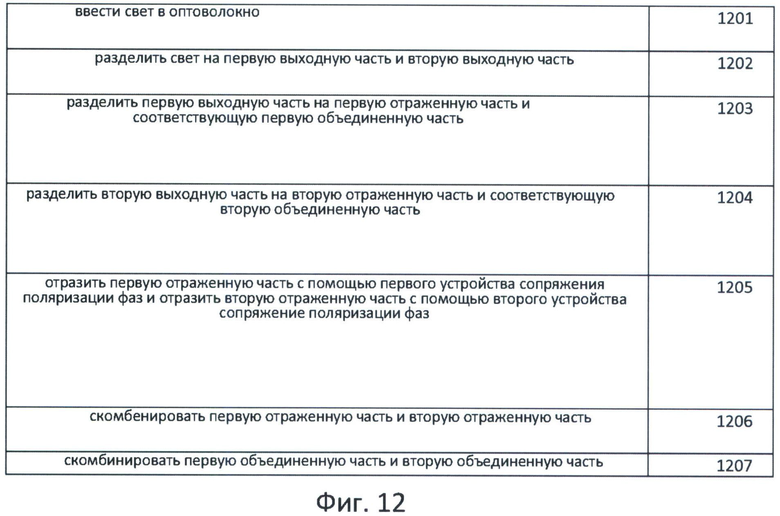
Фиг.12 является таблицей, обобщающей инновационный способ, как раскрыто в данном документе.
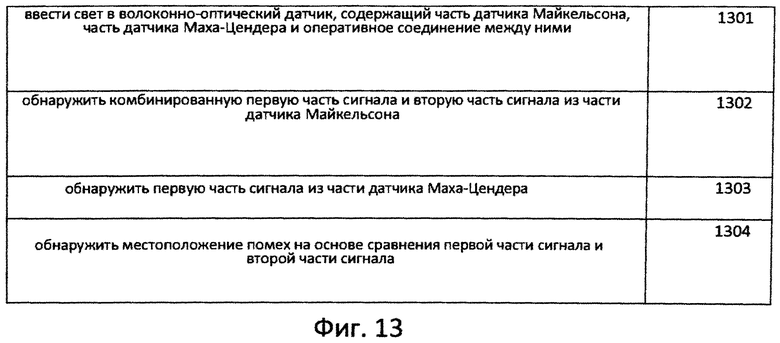
Фиг.13 является таблицей, обобщающей другой инновационный способ, как раскрыто в данном документе.
ПОДРОБНОЕ ОПИСАНИЕ
В данном документе посредством ссылки на примерные системы описаны различные принципы, связанные с системами с интерферометрами. Один либо более из раскрытых принципов могут быть включены в различные конфигурации систем для достижения одной либо более характеристик систем с интерферометрами. Системы, относящиеся к приложениям систем безопасности периметра, являются лишь примерами инновационных систем с интерферометрами и описаны в данном документе для иллюстрации аспектов различных принципов, раскрытых в данном документе. Некоторые варианты осуществления раскрытых инноваций могут быть в равной степени применимы для использования во многих других приложениях, например, для обнаружения утечки из магистрали, для обнаружения сбоя в структуре, для обнаружения помех на поверхности земли, для обнаружения изменения в работе конвейера и т.д.
Обзор инновационных систем с интерферометрами
Системы с интерферометрами, как раскрыто в материалах данного документа, могут обнаруживать помехи в части датчика с помощью сравнения сдвига фазы между фиксируемыми первым и вторым оптическими сигналами, которые перемещаются через первый (например, «опорный») оптический канал и второй (например, «сенсорный») оптический канал.
Например, инновационный интерферометр 100, показанный на фиг.2, имеет первый разветвитель/объединитель 110, сконфигурированный для разделения модулированного света (обозначенного с помощью стрелок 112а, 112b) между первым и вторым оптическими каналами 114а, 114b (например, оптоволоконные кабели, такие как, например, одномодовые оптоволоконные кабели). Первый и второй терминальные разветвители/объединители 116а, 116b, расположенные по соседству с удаленным (терминальным) концом 118 соответствующего первого и второго каналов сконфигурированы для направления части света в каналы либо в (1) другой объединитель 120 (упоминаемый в данном документе как «объединитель Маха-Цендера»), сконфигурированный для рекомбинации света из первого и второго каналов 114а, 114b либо в (2) соответствующие первое и второе устройства 122а, 122b сопряжения поляризации фаз, которые сконфигурированы для сопряжения фаз поляризации падающего света. Примером подобного устройства 122а, 122b сопряжения поляризации фаз является вращательное зеркало Фарадея, как указано на фиг.2. Соответствующее вращательное зеркало Фарадея можно найти у OFRMF1-1310-A (http://www.ofr.com/fo-53_mfi.htm).
Интерферометр Майкельсона может обнаруживать разницу в длине первого оптического пути и второго оптического пути и таким образом, помехи для одной пары оптических путей. Интерферометр Майкельсона разделяет коллимированный пучок света на пару пучков света, которые следуют соответствующими световыми путями (например, с помощью оптического канала, такого как одномодовое оптоволокно). В терминальном конце соответствующих оптических путей каждый соответствующий пучок отражается из условия, чтобы он проходил через тот же самый соответствующий световой путь второй раз, хотя и в противоположном направлении, по сравнению с первым разом, когда пучок проходил через него. Сдвиг фазы между отраженной парой пучков указывает, что соответствующие оптические пути имеют различные оптические длины. Таким образом, интерферометр Майкельсона может использоваться для обнаружения помех для пары световых путей, которые вызывают чистое изменение в относительных длинах оптических путей. Как и интерферометр Маха-Цендера, интерферометр Майкельсона в одиночку не сможет идентифицировать местоположение либо магнитуду подобных помех.
При таком расположении, как показано на фиг.2, первый разветвитель/объединитель 110, пара оптических каналов 114а, 114b (например, кабели) и соответствующие первое и второе устройства 122а, 122b сопряжения поляризации фаз формируют, по меньшей мере, часть интерферометра Майкельсона. Соответствующие первое и второе устройства 122а, 122b сопряжения поляризации фаз, например, вращательные зеркала Фарадея в варианте осуществления, показанного на фиг.2, могут быть сконфигурированы для смены быстрых и медленных осей поляризации отраженного света. Соответственно, состояние поляризации каждого соответствующего отраженного пучка света, возвращающегося из соответствующих устройств 122а, 122b в первый разветвитель/объединитель 110 через каждый канал 114а, 114b может быть сопряжено с состоянием поляризации света, когда он переместился из разветвителя 110 в устройства 122а, 122b. Первый разветвитель/объединитель 110 может быть сконфигурирован для объединения соответствующих пучков отраженного света, перемещающегося в соответствующих каналах 114а, 114b и для перенаправления части комбинированного света для возбуждения первого детектора 124 (упоминаемого в данном документе как «детектор Майкельсона»). В некоторых вариантах осуществления первый детектор сконфигурирован как индий-галлий-арсенидный фотодиод с волоконными выводами из одномодового волокна.
Соответствующие части света первого и второго каналов 114а, 114b, которые направлены на объединитель 120 Маха-Цендера, могут рекомбинироваться объединителем и направляться в возвратный канал 126 (например, третий одномодовый кабель), оптически соединенный со вторым детектором 128 (упоминаемый в данном документе как «детектор Маха-Цендера») из условия, чтобы оптический сигнал в возвратном канале мог возбуждать второй детектор. В некоторых вариантах осуществления объединитель 120 является одномодовым объединителем в 3 дБ с предохранителем. Относительно детектора 124 Майкельсона, детектор Маха-Цендера может конфигурироваться как индий-галлий-арсенидный фотодиод с волоконными выводами из одномодового волокна.
Детектор 128 Маха-Цендера может располагаться по соседству с источником модулированного света (идентифицированного на фиг.2 как «управление модуляцией»), с детектором 124 Майкельсона либо обоими. Подобная конфигурация может обеспечивать полностью пассивную часть 130 оптического датчика, распространяющуюся от активной части 132а на более чем 50 км либо дальше. Как проиллюстрировано на фиг.2 и 3, активные части 132а, 132b содержат, соответственно, источник модулированного света, детекторы 124, 128 и демодулятор. Активная часть 132b также включает в себя скремблер поляризации. Подобный источник света может быть лазером, распространяющимся по волоконным выводам из одномодового волокна, имеющим узкую ширину линии, либо другим устройством с лазером, имеющим узкую ширину линии. Соответствующим модулятором является устройство NOPS-115111331 Агилтрон. Пассивные части 130 содержат оптические каналы 114а, 114b, 126, устройства 122а, 122b сопряжения поляризации фаз и разветвители/объединители 116а, 116b, 120, расположенные по соседству с удаленным концом 118.
С помощью такого интерферометра 100 сигнал, обнаруженный детектором 124 Майкельсона, может включать в себя часть сигнала, соответствующего выходному свету, смешанному и соединенному с частью сигнала, соответствующего входному свету, отраженному устройствами 122а, 122b сопряжения фаз поляризации. Сигнал, обнаруженный детектором 128 Маха-Цендера, включает в себя часть сигнала, соответствующего выходному свету. (В некоторых случаях одна либо более частей сигнала, фиксируемых детекторами Майкельсона либо Маха-Цендера, соответствуют гармонике более высокого порядка, возникающей из отражений. Подобная гармоника может соответствующим образом быть отфильтрована с помощью фильтров нижних частот).
Сигналы из соответствующих детекторов 124, 128 могут предоставляться демодулятору, и демодулятор может предоставлять соответствующие выходы I и Q векторов (описанные ниже) для, например, устройства с последующей обработкой, например, вычислительная среда, описанная ниже. Когда выходы векторов превышают указанное пороговое значение (например, обнаружение помех), устройство с последующей обработкой может, например, обеспечивать аварийный сигнал, указывающий на присутствие помех.
Например, если в один из оптических каналов 114а, 114b вносятся помехи в точке 101, выходной свет из разветвителя/объединителя ПО может достичь точки 101 после первого промежутка времени Т1, и отраженная часть света может снова достичь точки 101 во второй промежуток времени (Т1+Т2+Т2). В таком примере оптический сигнал, фиксируемый детектором 124 Майкельсона, может включать в себя первую часть сигнала, возникающего из возмущения выходного света, смешанного и соединенного со второй частью сигнала, возникающего из возмущения входного (отраженного) света. Так как смешанные и соединенные первая и вторая части («компоненты сигнала Майкельсона») фиксируются единственным детектором 124, они не могут фиксироваться независимо. Определенные различным способом, два компонента сигнала Майкельсона (выходной и входной) не могут быть выделены из объединенного состава.
Напротив, сигнал, фиксируемый в детекторе 128 Маха-Цендера, может содержать часть сигнала, возникшего лишь из возмущения выходного света. Таким образом, в некоторых раскрытых подходах сигнал из детектора Маха-Цендера может извлекаться из сигнала, фиксируемого в детекторе Майкельсона (объединенный состав первой части выходного сигнала и второй части входного сигнала) для получения второй части сигнала. Подобная вторая часть сигнала может, таким образом, использоваться для извлечения первой части сигнала Майкельсона и он может сравниваться с первой частью сигнала, фиксируемого детектором Маха-Цендера. Сдвиг фазы либо времени между первыми частями сигнала каждого интерферометра может обеспечивать возможность измерения местоположения помех, как описано более подробно ниже. Альтернативно либо дополнительно сравнение первой части сигнала и второй части сигнала, выделенных из сигнала детектора Майкельсона, может предоставлять возможность измерения местоположения помех. Аналогично, возможность сравнения первой и второй частей выделенного сигнала датчика Майкельсона может использоваться для предоставления возможности измерения местоположения помех.
Из сдвига фазы может быть определена задержка Т1 между промежутком времени, когда свет введен в датчик 130 и промежутком времени, когда свет достигает точки помех 101, и задержка (Т1+Т2+Т2) между моментом времени, когда свет введен в датчик 130 и моментом времени, когда свет отражен устройствами 122а, 122b сопряжения поляризации фаз, достигает точки помех 101. Со знанием о соответствующих задержках, положение точки помех 101 вместе с датчиком 130 может быть вычислено, используя раскрытые способы. Кроме того, магнитуда помех может также определяться с использованием способов, описанных ниже.
Амплитуда сигнала в детекторе 128 Маха-Цендера может соответствовать, по меньшей мере, частично состоянию поляризации света 112, входящего в первый разветвитель/объединитель 110. Так как состояние поляризации входящего света дрейфует, выход из детектора Маха-Цендера соответствующим образом изменяется. Например, в некоторых состояниях поляризации, выход датчика Маха-Цендера может иметь неподходящее отношение сигнал-шум, что может привести к так называемому «замиранию поляризации» выхода детектора Маха-Цендера. Было обнаружено, что подобное замирание поляризации может быть уменьшено либо исключено с помощью случайной корректировки состояния поляризации входящего света для поддержания подходящего отношения сигнал-шум, хотя состояние точной поляризации входящего пучка света не имеет значения. Соответственно, было обнаружено, что состояние поляризации может случайным образом изменяться, что позволяет состоянию поляризации источника расширяться с помощью поверхности сферы Пуанкаре.
На фиг.3 датчик 100а включают в себя скремблер 132 поляризации, сконфигурированный для корректировки с перерывами состояния поляризации входящего света 112 для поддержания соответствующего отношения сигнал-шум в детекторе 128 Маха-Цендера. Скремблер поляризации не имеет или имеет незначительное воздействие на часть Майкельсона в датчике, так как устройства сопряжения поляризации фаз (например, вращательные зеркала Фарадея) сопрягают состояние поляризации отраженного света, эффективно отменяя любые воздействия, которые могли бы иметь место при изменении в поляризации, так как свет перемещается между разветвителем 110 и устройствами 122а, 122b в прямом направлении и затем от устройств обратно к разветвителю/объединителю и детектору 124 Майкельсона.
Соответствующий скремблер 132 поляризации является электрически возбуждаемым скремблером-контроллером поляризации типа, созданного Агилтроном, модель NOPS-115111331. Подобное устройство может контролироваться тремя либо четырьмя (например, в зависимости от модели) входными напряжениями, которые могут изменяться в соответствующем диапазоне напряжений для поддержания многочисленных состояний поляризации. В одном оперативном варианте осуществления различные сигналы возбуждения могут использоваться для каждого (например, трех либо четырех) из элементов скремблера. Может быть выбран каждый соответствующий сигнал возбуждения, чтобы разрешить переключение на большое число состояний поляризации случайным образом с изменением во времени.
Подобная случайная корректировка поляризации совершенно отличается от активного контроля и соответствует состояниям поляризации независимых пучков света, необходимых в датчиках такого типа, который раскрыт в патентах США №7499176, 7499177 и 6778717. Подобный активный контроль требует очень сложной схемы контроллера поляризации и является дорогим для реализации. Кроме того, контроль активной поляризации предшествующего уровня техники требует от датчика сделать паузу с перерывами, хотя свет, который имеет новое, подходящее состояние поляризации, является противонаправленным, который следует за обнаруженными помехами. Напротив, для датчика 100а необходима небольшая задержка либо ее отсутствие для обнаружения последующих помех. Соответственно, датчик 100, 100а может обнаружить помехи, следующие за первыми (например, «ложными») помехами и его невозможно легко обойти, используя подобные первые помехи для нарушения функционирования датчика, что может преодолеть серьезное, длительное отсутствие эффективности предшествующего уровня техники.
Устройства 132, которые могут случайно изменять состояние поляризации, как описано только что, являются, главным образом, менее затратными, чем контроллеры поляризации, сконфигурированные для сопоставления состояний поляризации различных пучков света, как необходимо для систем, раскрытых в патенте США №6778717. Кроме того, случайное изменение состояния поляризации входящего света 112 может происходить намного быстрее, чем сопоставление состояний поляризации пары пучков света друг с другом. Соответственно, гибридные системы Майкельсона/Маха-Цендера, раскрытые в данном документе, могут быстрее отвечать на последующие помехи, чем системы, которые требуют сопоставленных состояний поляризации различных пучков света и могут создаваться при более низких затратах, чем ранее предложенные датчики.
ПУТИ СВЕТА ЧЕРЕЗ РАСКРЫТЫЕ СИСТЕМЫ С ИНТЕРФЕРОМЕТРАМИ
Со ссылкой на фиг.2 и 3 управление модуляцией может излучать высококогерентный пучок света 112, который входит в разветвитель/объединитель 110, который разделяет свет 112 на первую часть, которая проходит через первый оптический канал 114а, и вторую часть, которая проходит через второй оптический канал 114b. Свет, проходящий через первый оптический канал 114а, входит в оптический разветвитель 116а, расположенный по соседству с удаленным концом 118 первого оптического канала, и свет, проходящий через второй оптический канал 114b, входит в оптический разветвитель 116b, расположенный по соседству с удаленным концом второго оптического канала. Соответствующие оптические разветвители 116а, 116b могут разделять соответствующие пучки света на соответствующие части, которые входят в удаленный объединитель 120 и соответствующие части, которые сталкиваются в соответствующих устройствах 122а, 122b сопряжения поляризации фаз.
Части света, которые сталкиваются в устройствах 122а, 122b, отражаются и каждое из устройств может сопрягать состояние поляризации соответствующих частей света. Отраженные части света могут перемещаться через разветвители 116а, 116b в соответствующих каналах 114а, 114b и обратно к ближайшему разветвителю/объединителю 110. Отраженные части света могут рекомбинироваться в объединителе 110 и часть рекомбинированного света может возбуждать детектор 124 Майкельсона. Возбуждение светом детектора Майкельсона может задавать оптический сигнал, который воздействует на оптические каналы 114а, 114b, включая любые помехи для каналов. Возбуждение светом детектора Майкельсона проходит через пару каналов 114а, 114b дважды, первый раз до возбуждения соответствующих устройств сопряжения поляризации фаз и второй раз после отражения от них и, таким образом, подвергается воздействию дважды тем же самым отклонением. Результирующий оптический сигнал может обеспечивать двойную чувствительность в сравнении, например, с Махом-Цендером либо с другим интерферометром, в котором оптический сигнал проходит, но один раз через оптический путь с помехами.
Соответствующие части, которые входят в удаленный объединитель 120, могут комбинироваться, могут проходить через обратный канал 126, который налагает дополнительные оптические задержки (например, TL), которые типично равны Т1+Т2, и могут возбуждать детектор 128 Маха-Цендера. В отличие от света, возбуждающего детектор 124 Майкельсона, главная часть (например, исключая отражения и другой «шум») света, возбуждающая детектор 128 Маха-Цендера, проходит через пару оптических каналов 114а, 114b один раз, и таким образом, на него единожды воздействует указанное отклонение. Напротив, на оптический сигнал, принятый детектором 124 Майкельсона, воздействуют дважды те же самые помехи, как описано выше.
ПАССИВНЫЕ ОПТИЧЕСКИЕ ДАТЧИКИ
В некоторых примерах, первый и второй оптические каналы 114а, 114b могут иметь аналогичные оптические свойства и аналогичные длины; в подобных примерах не имеет значения, какой канал рассматривается как чувствительный канал и опорный канал. В некоторых вариантах осуществления опорный и сенсорный оптические каналы 114а, 114b являются физически разными каналами, расположенными по соседству друг с другом в «связке» (также упоминаемой как «кабель»). В других вариантах осуществления оптические каналы 114а, 114b являются физически разными кабелями.
Например, традиционная волоконно-оптическая связка может включать в себя несколько отдельных оптических волокон (например, одномодовые волокна), защищенные одной либо более внешними оболочками. Одно из отдельных оптических волокон может определять сенсорный канал (например, 114а), и другое из отдельных оптических волокон может задавать опорный канал (например, 114b). Еще одно из отдельных оптических волокон может задавать обратный канал 126. Все волокна, задающие каналы 114а, 114b, 126, могут располагаться внутри и защищены общей внешней оболочкой(-ами). Хотя подобные оптические волокна располагаются относительно близко друг к другу (например, в пределах нескольких миллиметров друг от друга), физические помехи (например, воздействие либо отклонение), оказываемые на внешнюю оболочку(и), передается немного по-разному в каждое из отдельных волокон. Более того, каждое из отдельных волокон может соответствовать (например, деформировать либо иметь их соответствующие рефракционные индексы, кратковременно изменяющиеся) идентичным отличающимся нагрузкам. Таким образом, на практике, помехи для кабеля в целом по-разному приводят к отклонению опорных и сигнальных каналов 114а, 114b.
Так как физические ответы типично отличаются между «сенсорным» каналом и «опорным» каналом, свет, проходящий через «сенсорный» канал может доходить в терминальный конец 118 сенсорного канала в немного отличающийся промежуток времени, и, возможно, с другим состоянием поляризации, чем свет, проходящий через «опорный» канал. Таким образом, сигналы, фиксируемые в каждом соответствующем терминальном конце, обычно выходят за фазу друг от друга при номинальной величине. Когда либо один, либо другой либо оба канала, сенсорный и опорный, испытывают помехи, относительная фаза оптических сигналов, фиксируемых в каждом соответствующем терминальном конце, стремится к сдвигу от номинального уровня каналов, не испытывающих помех. В случае, когда интерферометр Майкельсона, у которого есть возможность разделять и сравнивать задержку между приемом первого (выходного) из оптических сигналов и второго (входного) из оптических сигналов (например, фиксируемый временной сдвиг между сигналами), и принимая во внимание характеристики компонентов интерферометра (например, длины оптических каналов, скорость света через каналы), можно определить положение помех. В другом подходе, первая часть сигнала, фиксируемая детектором Маха-Цендера, может сравниваться с извлеченной первой частью сигнала, зафиксированной интерферометром Майкельсона, для обеспечения измерения местоположения помех.
Хотя многие факторы могут вызвать фиксируемый сдвиг фазы между сигналами, переданными через первый и второй оптические каналы, может быть определен номинальный, либо базовый сдвиг фазы между зафиксированными сигналами опорного и сенсорного каналов, не испытывающих помех. Таким образом, можно сделать вывод, что кабель датчика (например, связка, у которой есть сенсорный канал и опорный канал) испытывал помехи, когда фиксировалось достаточно большое (либо пороговое) отклонение от основного сдвига фазы. Кроме того, фиксируя подобный сдвиг фазы в более чем одном месте, в общем оптическом пути (например, выходной и входной сигналы), объединенный с характеристиками сенсорного кабеля (например, его длина, скорость, при которой свет перемещается через каждый из оптических каналов), можно логически вывести место возникновения помех.
В некоторых вариантах осуществления, третий, нечувствительный канал 126, который налагает дополнительную временную задержку TL сигнала для интерферометра Маха-Цендера, может располагаться по соседству с одним либо обоими каналами, сенсорным каналом (например, канал 114а) и опорным каналом (например, канал 114b). Например, оптический кабель может иметь множество оптических каналов с общей оболочкой(-ами), как описано выше. Один из оптических каналов может создавать нечувствительный канал 126, сконфигурированный для возвращения света в детектор 128 Маха-Цендера, и другие два канала могут создавать сенсорный канал и, соответственно, опорный канал. В подобном варианте осуществления опорный и сенсорный каналы могут пассивно прерываться по соседству с удаленным концом 118 оптического кабеля, как показано на фиг.2 и 3.
Например, соответствующие разделители 116а, 116b и устройства 122а, 122b сопряжения поляризации фаз и удаленный объединитель 120 могут располагаться по соседству с удаленным концом 118 оптического кабеля 130. Подобная конфигурация может обеспечить полностью пассивный датчик для расширения своего действия на расстояния до, например, почти 65 км, от активных компонентов (например, источника света, детектора Майкельсона, детектора Маха-Цендера, вычислительной среды и т.д.).
В некоторых вариантах осуществления (описанных более полно ниже) второй пассивный датчик может расширять свое действие в противоположном направлении от первого пассивного датчика для дистанции до, например, почти 65 км. В таких вариантах осуществления сенсорная система может расширять свое действие до, например, почти 130 км, с активными компонентами 132а, 132b, расположенными почти в середине сенсорной системы.
МУЛЬТИПЛЕКСИРОВАННАЯ НЕСУЩАЯ С ФОРМИРОВАНИЕМ ФАЗЫ С ГОМОДИННОЙ ДЕМОДУЛЯЦИЕЙ
Модуляция тока в лазер (например, диодный лазер) может влиять как на амплитуду, так и на длину волны (оптическая частота) излучаемого света. Любой эффект (амплитуда либо длина волны) может использоваться для возбуждения датчика, как раскрыто в материалах настоящей заявки. Например, если сенсорный канал и опорный канал являются главным образом идентичными, то эффекты амплитудной модуляции могут преобладать над ответом датчика. С другой стороны, если один из каналов короче, чем другой, на, например, несколько метров, то эффекты модуляции частоты могут преобладать над ответом датчика. Датчики, описанные в данном документе, могут использовать любые подходы.
Для простоты и краткости, эффекты частотной модуляции (и, таким образом, способы, относящиеся к интерферометрам с датчиком разной длины и опорным каналам) описаны полностью.
специалисты в данной области техники примут во внимание аналогичные способы для получения помех и информации об их положении, используя интерферометры с датчиком равной длины и опорными каналами, и соответствующую амплитудную модуляцию. Последующие способы могут быть реализованы в вычислительной среде, как раскрыто более полно ниже.
Примеры инновационных способов, связанных с обнаружением помех и их местоположением
Часть датчика Майкельсона может предоставлять оптический сигнал, у которого есть два информационных компонента. Один компонент (I) может содержать информацию, получаемую из помех, когда свет перемещается из источника света (ближний конец) в устройства сопряжения поляризации фаз (удаленный конец). Второй компонент (II) может содержать информацию, получаемую в результате распространения света обратно от удаленного конца в ближний конец. Часть датчика Маха-Цендера может предоставлять оптический сигнал, у которого есть информационный компонент, а именно информация, полученная из помех, когда свет перемещается из источника (ближний конец) в объединитель (дальний конец). В качестве приближенного представления, ответ части датчика Маха-Цендера может предполагаться как идентичный первому компоненту (I) ответа части датчика Майкельсона, конкретно, если они совместно используют те же оптические каналы и может использоваться в преобразовании для изоляции второго компонента (II) от ответа интерферометра Майкельсона. Временная задержка между первым (I) и вторым (II) ответами может предоставлять возможность измерения местоположения помех вместе с длиной датчика. Теперь описано подобное преобразование.
Ответ (MI) части датчика Майкельсона может быть описан с помощью вектора, например, его синфазного (I) и квадратурного (Q) ответного компонента.


где TL=T1+T2.
Первый (I) и второй (II) компоненты интерферометра Майкельсона являются первым и вторым условиями угла фазы в каждом из уравнений (1) и (2).
Ответ (MZ) части датчика Маха-Цендера может быть также описан с помощью векторных компонентов, I и Q.


Так как и часть датчика Майкельсона, и часть датчика Маха-Цендера совместно используют тот же сенсорный и опорный каналы (например, каналы 114а, 114b на фиг.2 и 3), каждая часть датчика «видит» те же помехи. В целом, ответ Маха-Цендера является ответом с задержкой, так как часть датчика Маха-Цендера включает в себя нечувствительный канал 126, который возвращает оптический сигнал Маха-Цендера в детектор 128 Маха-Цендера. Математически, эта задержка может быть представлена как TL. При смещении ответа части датчика Майкельсона в уравнениях (1) и (2) за счет задержки передачи (сигнала) по кабелю TL, уравнения (5) и (6) имеют вид:


Первые (I) компоненты уравнений (5) и (6) имеют ту же синхронизацию, как и компоненты ответа Маха-Цендера в уравнениях (3) и (4), как и ожидалось, так как выходной свет перемещается по тому же самому пути для первого компонента (I) в части датчика Майкельсона и части датчика Маха-Цендера. Уравнения (5) и (6) могут быть затем переставлены, используя тригонометрические тождества, представленные как:


Замещая ответы Маха-Цендера, показанные в уравнениях (3) и (4), на уравнения (7) и (8), получают уравнения (9) и (10).


Ответ "X" может быть определен как


Замещая уравнения (11) и (12) на (9) и (10), получают уравнения (13) и (14).


Решая уравнения (13) и (14) для Ix(t)n Qx(t), получают уравнения (15) и (16).


Уравнения, получаемые выше, основаны на непрерывных во времени функциях. детектор 124, 128 осуществляет вывод, и эти уравнения могут быть оцифрованы и преобразованы в эквиваленты данных выборки, используя известные подходы. Таким образом, уравнения, описанные только что, могут быть реализованы в цифровой вычислительной среде. Цифровой вариант осуществления 200 системы 100а, показанный на фиг.3, проиллюстрирован на фиг.4.
Перед сравнением соответствующих сигналов Маха-Цендера и Майкельсона, данные Майкельсона могут математически иметь задержку на фиксированную величину, соответствующую, например, длине датчика (TL). Такая представленная задержка может использоваться для указания различий между конфигурациями интерферометров Маха-Цендера и Майкельсона.
ВЫБОРКА И МОДУЛЯЦИЯ
В одном варианте осуществления может использоваться та же частота fs=10 МГц (тот же период Ts=0,1 микросекунд). Относительная скорость оптического сигнала (сравнимая со светом в вакууме) 68,13% соответствует 10,36 метрам для того же самого периода. На основе этой скорости выборки 1 км датчика может иметь линию задержки с 97 отводами. Для облегчения вычислений, предполагается 100 ответвлений на каждые 100 км датчика (например, датчик на 20 км потребует линии задержки в 2000 отводов). Предполагаемая частота модуляции равна

Это может стать частотой несущей, ассоциированной с синфазным (I) компонентом, и несущая для квадратурного (Q) компонента может находиться во второй гармонике.

С частотой выборки в 10 МГц, это может предоставить достаточно места для аналогового антиалайзингового фильтра (ADC) после детектора и перед ADC. Диаграмма представительной выборки и синхронизации модуляции для каждого детектора проиллюстрирована на фиг.5.
Частота fu может обозначать содержание ответа верхней частоты. В некоторых примерах fu может быть почти 700 кГц. В рабочем варианте осуществления в лабораторной среде самая высокая частота, наблюдаемая до сих пор с помощью лабораторной системы, равна почти 400 кГц для части датчика Майкельсона и почти 200 кГц для части датчика Маха-Цендера. Во многих примерах ответная частота части датчика Майкельсона равна менее чем почти 200 кГц.
Сигнал возбуждения модуляции может быть производным (например, TL) от сигнала демодуляции для расчета задержки времени которая возникает из-за длины интерферометра Магнитуда перехода может быть снижена на задержку между объединителем Маха-Цендера и детектором Маха-Цендера.
Работа датчика может соответствовать в некоторых примерах работе аналогового антиалайзингового фильтра. Например, схема модуляции, описанная выше, может вызвать вывод детектором насыщенной гармоники.
ОБНАРУЖЕНИЕ ПОМЕХ ИЗ ЗАФИКСИРОВАННОГО ФАЗОВОГО ЛИБО ВРЕМЕННОГО СДВИГА
Описан рабочий вариант осуществления интегрального подхода к определению положения помех. В соответствии с этим подходом определяется временная разница между выводом части датчика Майкельсона и частью датчика Маха-Цендера, возникающая из физической деформации оптических каналов. Как указано в уравнениях выше, подобный сдвиг фазы может соответствовать положению помех вместе с чувствительной частью гибридного датчика 100, 100а Майкельсона и Маха-Цендера, как показано на фиг.2 и 3. Подобный инновационный подход преодолевает многие недостатки (и сопутствующие ограничения функционирования) датчиков предшествующего уровня техники (например, коаксиальный кабель, электрическое поле либо акустический кабель).
Векторный вывод I и ответы Q, показанные на фиг.6 для части датчика Майкельсона и фиг.7 для части датчика Маха-Цендера, представлены уравнениями (1), (2), (3) и (4), соответственно,.
Объединение инкрементных измерений фазы для каждого из соответствующих интерферометров в течение короткого промежутка времени, такого как, например, почти 10-20 миллисекунд, может предоставить возможность измерения изменения в длине оптических каналов 114а, 114b относительно друг друга в течение выбранного времени объединения для каждого из интерферометров. Так как оба интерферометра совместно используют те же самые оптические каналы, интегрированные инкрементные измерения фазы для каждого из соответствующих интерферометров должны быть теми же в промежутке времени согласно положению помех. Результаты подобного объединения показаны на фиг.8, показывая аналогичный объединенный шаблон фаз между двумя интерферометрами, а также временную задержку между сигналами, которые могут использоваться для определения положения помех.
На фиг.8 вертикальная ось представляет угол фазы в радианах. Например, диапазон ответа между от почти -24 до почти +35 радиан может соответствовать почти 9,4 циклам (интерференционные полосы), в соответствие с изменением почти в 14,57 микрометров в относительной длине сенсорного канала и опорного канала, предполагая, что в примерном варианте осуществления используется источник света, который имеет длину волны в 1,550 нанометров. В этом примере ответ в 9,4 цикла может иметь место во время периода времени почти в 0,25 миллисекунд, что представляет собой средний ответ по частоте почти в 37,6 кГц. Сдвиг во времени между ответами предоставляет возможность измерения местоположения лежащих в основе помех для чувствительной части гибридного интерферометра.
Для определения положения помех, возврат одной интегрированной фазы может постоянно извлекаться из возврата другой интегрированной фазы с различными временными сдвигами, и может быть вычислен подбор методом наименьших квадратов результирующих данных. Подобный подход может привести к обобщенной «V»-образной кривой корреляции, с выведенным местоположением помех, расположенных в верхней точке "V".
В определении положения помех один из смещенных профилей может быть извлечен из другого с другими параметрами задержки, нежели описано выше, чтобы найти наилучший подход к решению. В одном рабочем варианте осуществления два ответа были замещены от почти 0 до почти 2000 точек выборки. При скорости выборки в 10 МГц, точность элементов разрешения по дальности была приблизительно 10 метров. Это может быть улучшено с помощью интерполяции местоположения верхней точки «V».
Уравнения, представленные выше, и в этом разделе, обобщены в форме данных выборки (например, оцифрованы) в последующем разделе. Оцифрованная форма может использоваться в компьютерно реализуемых способах.
ОПРЕДЕЛЕНИЕ ТИПА ПОМЕХ ИЗ ЗАФИКСИРОВАННЫХ СИГНАЛОВ
Оптический сигнал может передавать информацию, связанную с типом помех, которые имели место. В некоторых примерах зафиксированный оптический сигнал (например, сигнал со сдвигом фазы, изменение в амплитуде либо оба) может соответствовать указанному типу помех (например, утечка в трубопроводе, действие подземных работ, проход в ограждении). Знание того, как оптический сигнал от датчика изменяется в ответ на различные помехи, может позволить пользователю определять, какой тип помех имел место на основе, по меньшей мере, частично, сравнивая зафиксированный сигнал с другим зафиксированным сигналом, сформированным в ответ на известные помехи.
Например, указанные помехи могут возбуждать указанную среду главным образом идентичным способом, каждый раз, когда происходят помехи, что приводит, таким образом, к главным образом, идентичному отклонению в указанном датчике каждый раз, когда происходят помехи. Когда датчик возмущается указанным способом, он может физически отвечать (например, подвергается напряжению либо деформации) соответствующим образом, и, таким образом, модифицировать оптический сигнал соответствующим образом.
В некоторых примерах, датчик может калиброваться в отношении различных помех с помощью записи каждого зафиксированного оптического сигнала, возникающего из множества различных помех. Например, может быть сформирована «проверочная» таблица сигналов, соответствующих каждым помехам. Последующий зафиксированный оптический сигнал (например, возникающий из неизвестного типа помех) может сравниваться с каждым из записанных зафиксированных оптических сигналов, и соответствующий тип помех может быть выведен, когда зафиксированный оптический сигнал соответствующим образом сопоставлен с ранее записанным оптическим сигналом.
Как отмечено выше, датчик может возбуждаться (и таким образом, может отвечать) в одной среде, сравнимой с другой средой. В других примерах, калибровка датчика (например, формирование «проверочной» таблицы) может быть завершена после того, как установлен датчик.
Уравнения в цифровой форме для определения положения помех
Уравнения, представленные выше, выражены в аналоговой форме. анализ, представленный выше, может быть осуществлен цифровым способом. Соответственно, уравнения представлены здесь в цифровой форме.
Зафиксированные (например, измеренные) параметры являются векторами {IMIi, QMIi} и {IMZi,QMZi}. Майкельсона и Маха-Цендера, взятые в момент «i». Из измеренного параметра {IXi, QXi} может быть определено следующее, используя:


Индексированная константа М относится к числу выборок, соответствующих временной задержке TL. Примечание: условия MZ в уравнениях (15) и (16) игнорируются, так как они отменяются при вычислениях касательной аппроксимации с малыми углами. Ответ {IMIi,QMIi} Маха-Цендера может использоваться для вычисления инкрементного угла Маха-Цендера, используя

и извлеченный ответ «X» {IXi, QXi} может использоваться для вычисления инкрементного угла «X», используя

Когда помехи обнаружены (например, превышена пороговая величина), может быть вычислено два смещенных профиля


Результирующие смещенные профили могут коррелироваться по времени для определения местоположения помех.
ВЫЧИСЛИТЕЛЬНЫЕ СРЕДЫ
Фиг.9 иллюстрирует обобщенный пример соответствующей вычислительной среды 1100, в которой описанные способы, варианты осуществления, методики и технологии могут быть реализованы. Вычислительная среда 1100 не предназначена, чтобы предлагать какое-либо ограничение на область использования или функциональность технологии, поскольку технология может быть реализована в различных вычислительных средах общего или специального назначения. Например, раскрытая технология может быть реализована с другими конфигурациями вычислительных систем, включая «карманные» устройства, многопроцессорные системы, основанную на микропроцессорах или программируемую бытовую электронную аппаратуру, сетевые ПЭВМ, мини-ЭВМ, универсальные вычислительные машины и т.п. Раскрытая технология может быть реализована на практике в распределенном вычислительном окружении, в котором задачи выполнены удаленными обрабатывающими устройствами, которые связаны через сеть связи. В распределенной вычислительной среде, программные модули могут размещаться как на локальном, так и на удаленном запоминающих устройствах.
Со ссылкой на фиг.9, вычислительная среда 1100 включает в себя, по меньшей мере, одно главное устройство 1110 обработки данных и память 1120. На фиг.9 эта наиболее базовая конфигурация 1130 заключена в пределах пунктирной линии. Главный блок 1110 обработки выполняет машиноисполняемые команды и может быть реальным либо виртуальным процессором. В многопроцессорной системе многочисленные устройства обработки данных исполняют машиноисполняемые инструкции, чтобы повысить возможности по обработке данных и, как таковые, многочисленные процессы выполняются одновременно. Памятью 1120 может быть энергозависимая память (например, регистры, кэш, ОЗУ (оперативное запоминающее устройство, RAM), энергонезависимая память (например, ПЗУ (постоянное запоминающее устройство, ROM), ЭСППЗУ (электрически стираемое и программируемое ПЗУ, EEPROM), флэш-память и т.д.) или некоторое сочетание этих двух. Память 1120 хранит программное обеспечение 1180, которое может, например, реализовать одну либо более инновационных технологий, описанных в материалах настоящей заявки. Вычислительная среда может обладать дополнительными признаками. Например, вычислительная среда 1100 включает в себя запоминающее устройство 1140, одно или более устройств 1150 ввода, одно или более устройств 1160 вывода и одно или более соединений 1170 связи. Механизм взаимного соединения (не показан), такой как шина, контроллер или сеть, осуществляет взаимное соединение компонентов вычислительной среды 1100. Типично, программное обеспечение операционной системы (не показано) предоставляет рабочую среду для другого программного обеспечения, исполняемого в вычислительной среде 1100, и координирует деятельность компонентов вычислительной среды 1100.
Запоминающее устройство 1140 может быть съемным или несъемным и включает в себя магнитные диски, магнитные ленты или кассеты, CD-ROM (ПЗУ на компакт диске), CD-RW (многократно перезаписываемый компакт диск), DVD (универсальный цифровой диск) или любой другой носитель, который может быть использован, чтобы сохранять информацию, и к которому можно осуществлять доступ в пределах вычислительной среды 1100. Запоминающее устройство 1140 хранит инструкции для программного обеспечения 1180, которое может реализовать технологии, описанные в данном документе.
Устройство(а) 1150 ввода может быть сенсорным устройством ввода, таким как клавиатура, клавишная панель, мышь, перо или шаровой манипулятор, устройство голосового ввода, устройство сканирования или другое устройство, которое обеспечивает ввод в вычислительную среду 1100. Для звука, устройством(ами) 1150 ввода может быть звуковая плата или аналогичное устройство, которое принимает звуковой входной сигнал в аналоговой или цифровой форме, либо считыватель CD-ROM, который поставляет звуковые выборки в вычислительную среду 1100. Устройством(ами) 1160 вывода может быть дисплей, принтер, динамик, устройство для записи CD-RW или другое устройство, которое обеспечивает вывод из вычислительной среды 1100.
Соединение(я) 1170 связи дает возможность обмена данными через среду передачи данных (например, вычислительную сеть) с другой вычислительной сущностью. Среда передачи данных передает информацию, такую как машиноисполняемые инструкции, сжатую графическую информацию или другие данные в модулированный информационный сигнал.
Машиночитаемые носители - это любые имеющиеся в распоряжении носители, к которым может быть осуществлен доступ в вычислительной среде 1100. В качестве примера, а не ограничения, касательно вычислительной среды 1100, машиночитаемые носители включают в себя память 1120, запоминающее устройство 1140, среду передачи данных (не показано) и сочетания любых из вышеприведенных.
ДРУГИЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ
Используя принципы, раскрытые в данном документе, специалисты в данной области техники примут во внимание большое множество возможных вариантов осуществления систем с интерферометрами, особенно те, которые сконфигурированы для обнаружения помех. Например, помехи могут быть обнаружены из наблюдения за разделением поляризации, разделением длины волн либо и того, и другого, в дополнение либо вместо разделения по модуляции.
Разделение по модуляции со множеством источников света
Хотя инновационные системы 100, 100а, 200 с интерферометрами, которые содержат единственный источник света, описаны выше, многочисленные источники света могут использоваться в системе 500, как показано, например, на фиг.10. Например, соответствующие амплитуды первого и второго источников света (соответственно, помеченных как «источник 1 лазера» и «источник 2 лазера» на фиг.10) могут модулироваться в соответствующей первой и второй частоте. Вывод каждого детектора Dl, D2 может демодулироваться для извлечения соответствующих ответов интерферометра. Как показано на фиг.10, подобная система может включать в себя два устройства сопряжения фазы поляризации (отмеченных как «вращательное зеркало Фарадея» на фиг.10), соответствующего каждому оптическому каналу интерферометра.
В подобной системе 500 первая и вторая частоты модуляции предпочтительно расположены над конечным ответным диапазоном для достижения соответствующей чувствительности к помехам. Например, частоты модуляции могут находиться в диапазоне от 50 кГц до 750 кГц. В этом примере предполагается использовать частоты модуляции в 20 МГц и 30 МГц. Подобный выбор частот позволяет ясно отличать и разделять соответствующие ответы. Как отмечено на фиг.10, смеситель может использоваться для понижения соответствующих ответов до модулирующей полосы частот перед фильтрацией с помощью подходящего фильтра низких частот.
На фиг.10 источник #1 лазера может модулироваться по первой частоте f1. Модулированный выход лазера #1 может быть соединен с кабельным вводом и интерферометром #1 Майкельсона. Ответ от этого интерферометра, измеряемый в детекторе D1, может быть оперативно соединен с процессором.
Источник #2 лазера может модулироваться на второй частоте f 2. Модулированный выход лазера #2 может быть соединен с кабельным вводом и интерферометром #2 Майкельсона. Ответ от этого интерферометра, измеряемый в детекторе D2, может быть оперативно соединен с процессором.
Например, соответствующий вывод каждого детектора, D1 и D2, может проходить через антиалайзинговые фильтры для удаления компонентов высокой частоты из условия, чтобы выводы аналого-цифрового преобразователя (ADC #1 и #2) точно представляли необходимый аналоговый вывод детекторов. Скорость выборки ADC-преобразователей может быть равна fs Сопряженная частота антиалайзинговых фильтров может быть меньше, чем половина частоты выборки, чтобы оставаться совместимой с критерием выборки Найквиста.
При обработке цифрового сигнала выводы детекторов могут проходить через полосовые фильтры по частотам модулирования. Подобные фильтры могут удалять нежелательные условия (например, нежелательные комбинационные составляющие, которые могут возникнуть при смешивании) до смешивания. Ширина полосы частот каждого из фильтров может быть в два раза больше верхней ответной частоты (т.е. 2fu). Подобные фильтры имеют тенденцию удалять компоненты модулирующей полосы частот из процесса обнаружения, оставляя лишь частоты модуляции, используемые во время демодуляции, например, ω1 и ω2, и удваивать эти частоты.
Сигналы могут демодулироваться с помощью умножения соответствующих частот модуляции (например, умножая на +1 и -1 в соответствующих скоростях f1, 2f1, f2 и 2f2 модуляции). Это транслирует ответы вниз по частоте до модулирующей полосы частот, где они проходят через полосовой фильтр для получения необходимых векторных выходов [I1(t), Q1(t)] и [I2(t), Q2(t)].
Интерпретация ответов I и Q
Ответ от интерферометра, показанный на фиг.10 (либо на фиг.2 и 3), может появиться как вектор вращения, который вычерчивает окружность, как показано на фиг.11(А) и 11(B).
Направление вращения может быть определено с помощью относительного изменения в длине сенсорного канала и опорного канала. В общем, можно ожидать, что ответ будет вращаться в одном направлении в течение множества циклов под влиянием помех и вращаться в противоположном направлении, как только канал вернется в соответствующее состояние без помех.
Так как ответ типично содержит множество различных частотных компонентов, направление вращения может оказаться постоянным, хотя его угловая скорость может значительно изменяться со временем. Результирующий шаблон в целом является уникальным для каждой помехи, но в целом фиксируется, как тот же самый из обоих детекторов, так как оба детектора принимают сигналы от тех же волокон, отвечающих на те же помехи. детекторы принимают оптические сигналы в разные промежутки времени, так как соответствующие длины путей различаются для двух интерферометров. Соответственно, положение объекта с помехами может быть идентифицировано с помощью корреляции ответа #1 с ответом #2.
Как отмечено выше, каждая помеха для чувствительных каналов создает уникальный ответ в терминах числа циклов.
Таблица, показанная на фиг.12, идентифицирует несколько действий, которые вместе создают инновационный способ, раскрытый в материалах настоящей заявки. Например, ссылаясь на системы, показанные на фиг.2 и 3, и таблицу на фиг.12, свет может быть введен в волокно 1201. Свет может быть разделен на первую выходную часть и вторую выходную часть 1202. Первая выходная часть может быть разделена на первую отраженную часть и соответствующую, первую объединенную часть 1203. Вторая выходная часть может быть разделена на вторую отраженную часть и соответствующую вторую объединенную часть 1204. Первая отраженная часть может быть отражена с помощью первого устройства сопряжения поляризации фаз, и вторая часть может быть отражена вторым устройством 1205 сопряжения поляризации фаз. Первая отраженная часть и вторая отраженная часть могут быть объединены 1206. Первая объединенная часть и вторая объединенная часть могут быть объединены 1207.
Таблица, показанная на фиг.13, идентифицирует несколько действий, которые вместе создают другой инновационный способ, раскрытый в материалах настоящей заявки. Например, ссылаясь на системы, показанные на фиг.2 и 3, и таблицу, показанную на фиг.13, свет может быть введен в оптоволоконный датчик, содержащий часть датчика Майкельсона, часть датчика Маха-Цендера и оперативное соединение между ними. Объединенная первая часть сигнала и вторая часть сигнала могут быть обнаружены из части 1301 датчика Майкельсона. Первая часть сигнала может быть обнаружена частью 1202 датчика Маха-Цендера. Местоположение помех может восприниматься на основе, по меньшей мере, частично, при сравнении первой части сигнала и второй части 1304 сигнала.
РАСКРЫТЫЕ ПРИНЦИПЫ НЕ ОГРАНИЧЕНЫ ОПИСАННЫМИ ВАРИАНТАМИ ОСУЩЕСТВЛЕНИЯ
Это изобретение делает ссылку на прилагаемые чертежи, которые создают его часть, в которой аналогичные цифры повсюду обозначают аналогичные части. Чертежи иллюстрируют конкретные варианты осуществления, но могут быть созданы другие варианты осуществления, и структурные изменения могут быть сделаны без отклонения от подразумеваемого объема этого изобретения. Направления и ссылки (например, вверх, вниз, верхняя часть, нижняя часть, слева, справа, с тыльной стороны, с передней стороны и т.д.) могут использоваться для облегчения рассмотрения чертежей, но не подразумеваются как ограничительные. Например, могут использоваться определенные термины, такие как «вверх», «вниз», «выше», «ниже», «горизонтальный»", «вертикальный», «левый», «правый» и т.п. Эти термины используются там, где это применимо, для предоставления ясности в описании, когда имеют дело с относительными связями, особенно в отношении проиллюстрированных вариантов осуществления. Подобные термины тем не менее не предназначены подразумевать абсолютные связи, положения и/или ориентации. Например, в отношении объекта, «верхняя» поверхность может стать «нижней» поверхностью, просто перевернув объект. Это все та же поверхность и объект остается тем же самым. Как используется в материалах данной заявки, «и/или» означает «а также» и «либо».
Соответственно, это подробное описание не должно толковаться в ограничительном смысле, и следуя за рассмотрением этого изобретения специалисты в данной области техники примут во внимание большое множество систем с интерферометрами, которые могут быть разработаны и созданы с использованием различных идей, описанных в материалах данной заявки. Более того, специалисты в данной области техники примут во внимание, что примерные варианты осуществления, раскрытые в данном документе, могут адаптироваться к различным конфигурациям без отклонения от раскрытых идей. Таким образом, с точки зрения многочисленных возможных вариантов изобретения, к которым могут быть применимы раскрытые принципы, следует принять во внимание, что вышеописанные варианты осуществления являются лишь примерами и не должны рассматриваться как ограничительные по объему изобретения. И, хотя подробная формула изобретения не представлена здесь, так как формула изобретения не является необходимым компонентом для предварительной патентной заявки, я оставляю за собой право заявлять моим изобретением все, что изложено в пределах объема изобретения и его сущности, испрашивать формулу изобретения, так как мое изобретение, которое находится в пределах объема и сущности предмета изобретения, раскрытых в данном документе, включая, но не ограничиваясь всем, что попадает в объем и сущность последующих параграфов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для мониторинга виброакустических характеристик протяженных объектов | 2024 |
|
RU2837066C1 |
| Устройство для мониторинга виброакустических характеристик протяженных объектов | 2024 |
|
RU2830211C1 |
| Способ и устройство генерации квантовых состояний с фазовым кодированием и состоянием ловушек | 2022 |
|
RU2814147C1 |
| Способ определения степени и места возмущения зонной волоконно-оптической системы охраны объектов и устройство для его реализации | 2015 |
|
RU2695415C2 |
| Способ измерения фазового сигнала двулучевого волоконно-оптического интерферометра | 2020 |
|
RU2742106C1 |
| Устройство формирования квантовых состояний для систем квантовых коммуникаций с оценкой качества приготовления состояний для протоколов квантовой генерации ключа на чипе | 2023 |
|
RU2806904C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА (ВАРИАНТЫ) | 2012 |
|
RU2520963C2 |
| Устройство контроля фазовых сдвигов излучения в интегральных схемах на базе несимметричного интерферометра Маха-Цендера | 2023 |
|
RU2805561C1 |
| СПОСОБ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАЗМЕЩЕННОГО НА ПОДВИЖНОМ ЭЛЕМЕНТЕ ОГРАЖДЕНИЯ КОНЦЕВОГО ОПТОВОЛОКОННОГО ДАТЧИКА | 2020 |
|
RU2783885C2 |
| КОНЦЕВОЙ ОПТОВОЛОКОННЫЙ ДАТЧИК | 2020 |
|
RU2774150C2 |
Изобретение относится к области интерферометрии. Система с интерферометрами содержит содержит волоконно-оптический датчик, который может иметь часть датчика Майкельсона и часть датчика Маха-Цендера. Первый разветвитель-объединитель может быть сконфигурирован для разделения света между первой оптоволоконной частью и второй оптоволоконной частью. Первое устройство сопряжения поляризации фаз может быть сконфигурировано для сопряжения фазы поляризации падающего света, соответствующего первой оптоволоконной части, и второе устройство сопряжения фазы поляризации может быть сконфигурировано для сопряжения фазы поляризации падающего света, соответствующего второй оптоволоконной части. Каждое, первое и второе устройства сопряжения поляризации фаз могут быть сконфигурированы для отражения света в детектор и через соответствующие первую и вторую оптоволоконные части. Объединитель может быть сконфигурирован для объединения света в первой оптоволоконной части со светом во второй оптоволоконной части, и третья оптоволоконная часть может быть сконфигурирована для приема света от объединителя и для возбуждения второго детектора. Технический результат - упрощение конструкции системы для обнаружения положения либо магнитуды помех. 5 н. и 21 з.п. ф-лы, 13 ил.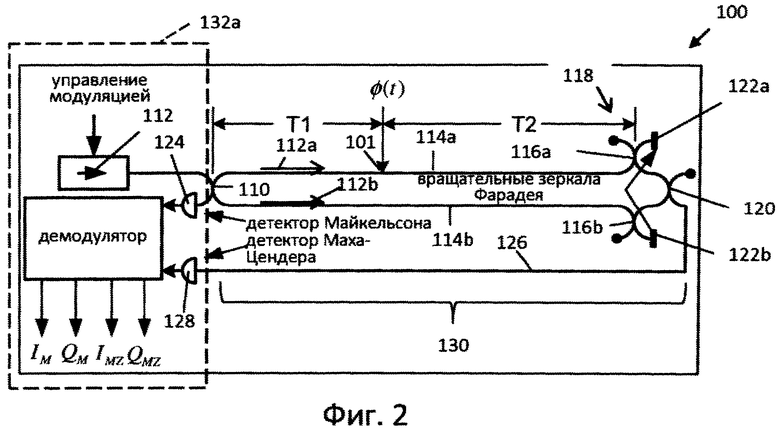
1. Волоконно-оптический датчик, содержащий часть датчика Майкельсона и часть датчика Маха-Цендера, и оперативное соединение между ними, сконфигурированный для возможности обнаружения помех датчиком, датчик содержит:
первую оптоволоконную часть и вторую оптоволоконную часть, задающие чувствительную часть датчика, каждая распространяющая свое действие между соответствующими ближним и дальним концами;
первый разветвитель-объединитель, расположенный поблизости от ближних концов первой оптоволоконной части и второй оптоволоконной части и сконфигурированный для разделения входящего света между первой оптоволоконной частью и второй оптоволоконной частью;
объединитель, расположенный поблизости от соответствующих удаленных концов первой оптоволоконной части и второй оптоволоконной части;
первое устройство сопряжения поляризации фаз, сконфигурированное для сопряжения фазы поляризации падающего света, соответствующего первой оптоволоконной части, и второе устройство сопряжения поляризации фаз, сконфигурированное для сопряжения фаз поляризации падающего света, соответствующего второй оптоволоконной части;
второй разветвитель-объединитель, расположенный поблизости от удаленного конца первой оптоволоконной части и сконфигурированный для разделения света от первой оптоволоконной части к первому устройству сопряжения поляризации фаз и к объединителю;
третий разветвитель-объединитель, расположенный поблизости от удаленного конца второй оптоволоконной части и сконфигурированный для разделения света от первой оптоволоконной части ко второму устройству сопряжения поляризации фаз и к объединителю, в котором первый разветвитель-объединитель дополнительно сконфигурирован для комбинирования света, отраженного первым устройством сопряжения поляризации фаз через первую оптоволоконную часть с помощью света, отраженного вторым устройством сопряжения поляризации фаз через вторую оптоволоконную часть, и для направления комбинированного света в первый детектор,
при этом третья оптоволоконная часть, задающая нечувствительную часть датчика и имеющая удаленный конец, сконфигурированный для приема света от объединителя, и ближний конец, сконфигурированный для направления света от объединителя во второй детектор, при этом датчик сконфигурирован из условия, чтобы первый оптический сигнал, обнаруженный первым детектором, и второй оптический сигнал, обнаруженный вторым детектором, передавали достаточно информации для оценки местоположения помех в чувствительную часть датчика.
2. Волоконно-оптический датчик по п. 1, отличающийся тем, что датчик дополнительно сконфигурирован для обнаружения местоположения помех, магнитуды помех либо и того, и другого.
3. Волоконно-оптический датчик по п. 1, дополнительно содержащий:
первый детектор, сконфигурированный для приема света, отраженного первым устройством сопряжения поляризации фаз и вторым устройством сопряжения поляризации фаз;
второй детектор, сконфигурированный для приема света от третьей оптоволоконной части;
при этом свет, который проходит через третью оптоволоконную часть, возбуждает второй детектор независимо от света, отраженного первым либо вторым устройством сопряжения поляризации фаз.
4. Волоконно-оптический датчик по п. 1, отличающийся тем, что дополнительно содержит скремблер поляризации, сконфигурированный для изменения состояния поляризации света, попеременно входящего в первую и вторую части волоконно-оптического датчика, так чтобы поддерживать соответствующее отношение сигнал-шум в части датчика Маха-Цендера.
5. Волоконно-оптический датчик по п. 1, отличающийся тем, что первая оптоволоконная часть, вторая оптоволоконная часть и третья оптоволоконная часть содержат один пассивно прерываемый волоконно-оптический кабель.
6. Волоконно-оптический датчик по п. 5, отличающийся тем, что ближний конец волоконно-оптического кабеля (i) сконфигурирован для соединения первого детектора из условия, чтобы свет от первого разделителя-объединителя мог возбуждать первый детектор, и (ii) сконфигурирован для соединения второго детектора из условия, чтобы свет от третьей оптоволоконной части мог возбуждать второй детектор.
7. Волоконно-оптический датчик по п. 1, отличающийся тем, что соответствующая длина каждой из первой оптоволоконной части и второй оптоволоконной части находится между приблизительно 1 км и приблизительно 65 км.
8. Волоконно-оптический датчик по п. 5, отличающийся тем, что длина оптоволоконного кабеля измеряется между приблизительно 1 км и приблизительно 65 км.
9. Способ обнаружения помех, используя пассивно прерываемый волоконно-оптический датчик, способ содержит этапы, на которых:
подают свет в волоконно-оптический датчик, содержащий (i) первую оптоволоконную часть и вторую оптоволоконную часть, задающие чувствительную часть датчика, и третью оптоволоконную часть, задающую нечувствительную часть датчика, каждая первая, вторая и третья оптоволоконные части распространяют свое действие на расстояние между соответствующими ближними и дальними концами, (ii) первый разветвитель-объединитель, расположенный рядом с ближними концами первой оптоволоконной части и второй оптоволоконной части и сконфигурированный для разделения входящего света между первой оптоволоконной частью и второй оптоволоконной частью, (iii) объединитель, расположенный рядом с соответствующими удаленными концами первой оптоволоконной части и второй оптоволоконной части и сконфигурированный для комбинирования света от первой оптоволоконной части со светом от второй оптоволоконной части и для направления комбинированного света в третью оптоволоконную часть, и (iv) первое устройство сопряжения поляризации фаз, сконфигурированное для сопряжения фазы поляризации падающего света, соответствующего первой оптоволоконной части, и второе устройство сопряжения поляризации фаз, сконфигурированное для сопряжения фазы поляризации падающего света, соответствующего второй оптоволоконной части;
обнаруживают с помощью первого детектора комбинированные первую и вторую части сигнала от света, отраженного первым устройством сопряжения поляризации фаз, и света, отраженного вторым устройством сопряжения поляризаций фаз.
обнаруживают с помощью второго детектора первую часть сигнала от света, объединенного объединителем и направленного в третью оптоволоконную часть; и
определяют местоположение помех на основе, по меньшей мере частично, сравнения первой части сигнала и второй части сигнала.
10. Способ по п. 9, отличающийся тем, что действие по определению местоположения помех содержит этап, на котором извлекают первую часть сигнала из комбинированных первой и второй частей сигнала.
11. Способ по п. 9, отличающийся тем, что дополнительно содержит этап, на котором определяют магнитуду помех частично на основе сдвига фазы, обнаруженного первым детектором, вторым детектором либо обоими детекторами.
12. Способ по п. 11, отличающийся тем, что действие по определению магнитуды помех содержит действие по определенному счету интерференционных полос.
13. Способ по п. 11, отличающийся тем, что действие по определению магнитуды помех содержит этап, на котором определенным способом объединяют сдвиг фазы.
14. Способ по п. 12, отличающийся тем, что действие по определению магнитуды помех дополнительно содержит определенное объединение сдвига фазы и усреднение магнитуды помех, определяемых из действия по определенному счету интерференционных полос с магнитудой помех, определенных из объединения сдвига фазы.
15. Система для отслеживания, содержащая: область отслеживания;
пассивно прерываемый чувствительный оптический датчик, содержащий (i) первую оптоволоконную часть и вторую оптоволоконную часть, задающие чувствительную часть датчика, и третью оптоволоконную часть, задающую нечувствительную часть датчика, каждая первая, вторая и третья оптоволоконные части распространяют свое действие на расстояние между соответствующими ближними и дальними концами, (ii) первый разветвитель-объединитель, расположенный рядом с ближними концами первой оптоволоконной части и второй оптоволоконной части и
сконфигурированный для разделения входящего света между первой оптоволоконной частью и второй оптоволоконной частью, (iii) объединитель, расположенный рядом с соответствующими удаленными концами первой оптоволоконной части и второй оптоволоконной части и сконфигурированный для комбинации света от первой оптоволоконной части со светом от второй оптоволоконной части и для направления комбинированного света в третью оптоволоконную часть, и (iv) первое устройство сопряжения поляризации фаз, сконфигурированное для сопряжения поляризации фазы падающего света, соответствующего первой оптоволоконной части, и второе устройство сопряжения поляризации фаз, сконфигурированное для сопряжения поляризации фазы падающего света, соответствующего второй оптоволоконной части, в которой датчик сконфигурирован для предоставления в ответ на помехи для чувствительной части датчика первой части сигнала от света, скомбинированного объединителем и направленного в третью оптоволоконную часть, и для предоставления первой части сигнала в комбинации со второй частью сигнала из света, отраженного первым устройством сопряжения поляризации фаз и света, отраженного вторым устройством сопряжения поляризации фаз, из условия, чтобы первый сигнал и комбинированные первый и второй сигналы передавали достаточно информации для оценки местоположения помех для чувствительной части датчика, и в котором чувствительная часть датчика настолько оперативно расположена рядом с областью отслеживания, что может подвергаться помехам области отслеживания.
16. Система по п. 15, отличающаяся тем, что область отслеживания содержит одно либо более ограждений, трубопроводов, железных дорог, линий связи, конвейеров, структур, соединенных с Землей, и периметров.
17. Система по п. 15, отличающаяся тем, что дополнительно содержит активную часть, оптически соединенную с оптическим датчиком, в котором активная часть содержит (i) источник модулированного света, сконфигурированный для излучения света в оптический датчик; (ii) первый детектор, сконфигурированный для обнаружения комбинированных первого и второго сигналов; и (iii) второй детектор, соединенный с третьей оптоволоконной частью и сконфигурированный для обнаружения первого сигнала, в котором пассивно прерываемый чувствительный оптический датчик распространяет свое действие от активной части на расстояние от приблизительно 1 км до приблизительно 65 км.
18. Система по п. 15, дополнительно содержащая второй оптический датчик, оптически соединенный с активной частью и распространяющий свое действие от активной части на расстояние от приблизительно 1 км до приблизительно 65 км.
19. Система по п. 18, отличающаяся тем, что оптические датчики определяют область и распространяют свое действие на расстояние от приблизительно 100 км до приблизительно 130 км, на котором могут быть обнаружены помехи с помощью одного либо обоих датчиков.
20. Машиночитаемый носитель, содержащий исполняемые инструкции, которые при выполнении вызывают выполнение устройством способа, содержащего этапы, на которых:
подают свет в волоконно-оптический датчик, содержащий (i) первую оптоволоконную часть и вторую оптоволоконную часть, задающие чувствительную часть датчика, и третью оптоволоконную часть, задающую нечувствительную часть датчика, каждая первая, вторая и третья оптоволоконные части распространяют свое действие на расстояние между соответствующими ближними и дальними концами, (ii) первый разветвитель-объединитель, расположенный рядом с ближними концами первой оптоволоконной части и второй оптоволоконной части и сконфигурированный для разделения входящего света между первой оптоволоконной частью и второй оптоволоконной частью, (iii) объединитель, расположенный рядом с соответствующими удаленными концами первой оптоволоконной части и второй оптоволоконной части и сконфигурированный для комбинирования света от первой оптоволоконной части со светом от второй оптоволоконной части и для направления комбинированного света в третью оптоволоконную часть, и (iv) первое устройство сопряжения поляризации фаз, сконфигурированное для сопряжения фазы поляризации падающего света, соответствующего первой оптоволоконной части, и второе устройство сопряжения поляризации фаз, сконфигурированное для сопряжения фазы поляризации падающего света, соответствующего второй оптоволоконной части;
обнаруживают с помощью первого детектора комбинированные первую и вторую части сигнала от света, отраженного первым устройством сопряжения поляризации фаз, и света, отраженного вторым устройством сопряжения поляризации фаз;
обнаруживают с помощью второго детектора первую часть сигнала от света, объединенного объединителем и направленного в третью оптоволоконную часть; и
определяют местоположение помех на основе, по меньшей мере частично, сравнения первой части сигнала и второй части сигнала.
21. Машиночитаемый носитель по п. 20, отличающийся тем, что действие по определению местоположения помех содержит этап, на котором извлекают первую часть сигнала из комбинированных первой и второй частей сигнала.
22. Машиночитаемый носитель по п. 20, отличающийся тем, что способ дополнительно содержит этап, на котором определяют магнитуду помех частично, на основе сдвига фазы, обнаруженного первым детектором, вторым детектором либо обоими.
23. Машиночитаемый носитель по п. 22, отличающийся тем, что действие по определению магнитуды помех содержит действие по определенному счету интерференционных полос.
24. Машиночитаемый носитель по п. 22, отличающийся тем, что действие по определению магнитуды помех содержит объединение определенным способом сдвига фазы.
25. Машиночитаемый носитель по п. 23, отличающийся тем, что действие по определению магнитуды помех дополнительно содержит определенное объединение сдвига фазы и усреднение магнитуды помех, определяемых из действия по определенному счету интерференционных полос с магнитудой помех, определенных из объединения сдвига фазы, счету интерференционных полос с магнитудой помех, определенных из объединения сдвига фазы.
26. Способ создания волоконно-оптического датчика, способ содержит этапы, на которых:
предоставляют первую оптоволоконную часть и вторую оптоволоконную часть, задающие чувствительную часть датчика;
предоставляют третью оптоволоконную часть, задающую нечувствительную часть датчика, в котором каждая первая, вторая и третья части распространяют свое действие между соответствующими ближними и дальними концами; и
оперативно соединяют первый разветвитель-объединитель с ближними концами первой оптоволоконной части и второй оптоволоконной части, из условия, что первый разветвитель-объединитель сконфигурирован для разделения входящего света между первой оптоволоконной частью и второй оптоволоконной частью;
оперативно соединяют объединитель с соответствующими удаленными концами первой оптоволоконной части и второй оптоволоконной части из условия, чтобы объединитель был сконфигурирован для комбинации первой оптоволоконной части со светом от второй оптоволоконной части и для направления скомбинированного света в третью оптоволоконную часть;
предоставляют первое устройство сопряжения поляризации фаз, сконфигурированное для сопряжения фазы поляризации падающего света с первой оптоволоконной частью, и второе устройство сопряжения поляризации фаз, сконфигурированное для сопряжения поляризации фаз падающего света, соответствующего второй оптоволоконной части, из условия, чтобы датчик был сконфигурирован для предоставления в ответ на помехи для чувствительной части датчика, первой части сигнала из света, скомбинированного объединителем и направленного в третью оптоволоконную часть, и для предоставления первой части сигнала в сочетании со второй частью сигнала из света, отраженного первым устройством сопряжения поляризации фаз и света, отраженного вторым устройством сопряжения поляризации фаз, в котором первый сигнал и комбинированные первый и второй сигналы передают достаточно информации для оценки местоположения помех в чувствительную часть датчика.
| US 5473459 A1, 05.02.1995 | |||
| US 20100014095 A1, 21.01.2010 | |||
| US 6842254 B2, 11.01.2005 | |||
| US 20020118368 A1, 29.08.2002 |

