Изобретение относится к устройствам энергетики и может найти применение при конструировании и изготовлении установок, требующих слежение за солнцем.
Прототипом является система слежения за солнцем фотоэнергоустановки, содержащая подсистему азимутального вращения и подсистему зенитального вращения, подсистема азимутального вращения выполнена в виде неподвижной стойки, по центру которой закреплен горизонтальный диск с рифленой поверхностью, являющийся ведомой шестерней первого редуктора, на торец стойки надета с возможностью вращения труба, на верхнем конце трубы закреплена горизонтальная ось, на которой с возможностью вращения установлена подсистема зенитального вращения, выполненная в виде пространственной рамы и прикрепленных снизу к раме двух вертикальных секторов с рифлеными круговыми торцовыми поверхностями, являющимися ведомыми шестернями второго редуктора, на нижнем конце трубы закреплен двуплечий рычаг, на котором установлены первый и второй приводы, вал первого привода соединен также с третьим редуктором, а вал второго привода соединен также с четвертым редуктором, на ведомых шестернях третьего и четвертого редукторов закреплены по два кулачка, разнесенных по окружностям и взаимодействующих с неподвижными концевыми выключателями, останавливающими вращение соответственно первого и второго приводов [Пат. РФ 2488046, МПК F24J 2/54, F16M 11/12, 2013].
Недостатками прототипа являются:
- сложная конструкция системы;
- большое энергопотребление, обусловленное вращением платформы с большим количеством узлов, в частности с установленными на ней приводами;
- сложность в эксплуатации, связанная с обслуживанием большого числа узлов.
Задачей изобретения является упрощение конструкции, снижение энергопотребления, надежности и улучшение эксплуатационных характеристик.
Задача решается тем, что в системе слежения за солнцем, содержащей датчик угла поворота, платформу, раму с тягой и электрические двигатели, кинематически связанные с рамой и установленные с возможностью перемещать раму вокруг ее горизонтальной и вертикальной геометрических осей, она, по крайней мере, имеет две кинематические связи, одна из которых выполнена в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси одного червяка, размещенного на платформе и взаимодействующего с зубчатым сектором, соединенным с тягой рамы, и сопряжено с другим червяком, ось которого совмещена с вертикальной осью поворота рамы и платформы.
Вторая кинематическая связь выполнена в виде червячной пары, колесом которой является платформа. Червячное колесо размещено в средней плоскости червяка, взаимодействующего с зубчатым сектором. Один червяк выполнен глобоидным. Червячная передача выполнена самотормозящейся. Червяк намагничен в радиальном направлении. Червяк, ось которого совмещена с вертикальной осью поворота рамы и платформы, выполнен в виде электрического контакта. Червяк, ось которого совмещена с вертикальной осью поворота рамы и платформы, выполнен пустотелым. Сердцевина червяка, ось которого совмещена с вертикальной осью поворота рамы и платформы, выполнена в виде световода.
Указанные отличительные признаки позволяют достичь следующих преимуществ по сравнению с прототипом.
Выполнение одной кинематической связи в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси одного червяка, размещенного на платформе и взаимодействующего с зубчатым сектором, соединенным с тягой рамы, и сопряжено с другим червяком, ось которого совмещена с вертикальной осью поворота рамы и платформы, позволяет размещать электродвигатель, управляющий поворотом рамы вокруг оси, вне платформы. Это снижает весогабаритные характеристики поворачивающихся частей, а также их момент инерции, что при частых пусках и остановках снижает энергопотребление, дает возможность применять менее мощный электродвигатель, улучшая тем самым эксплуатационные характеристики.
Выполнение второй кинематической связи в виде червячной пары, колесом которой является платформа, уменьшает число деталей механизма, что снижает его весогабаритные характеристики, а также уменьшает энергопотребление. Выполнение червяка глобоидным и размещение червячного колеса в средней плоскости червяка, взаимодействующего с зубчатым сектором, уменьшает весогабаритные характеристики механизма. Выполнение червячной передачи самотормозящейся позволяет автоматически фиксировать раму в нужном положении после отключения электродвигателей, что упрощает конструкцию и улучшает эксплуатационные характеристики привода.
Намагничивание червяка в радиальном направлении позволяет использовать его в виде датчика угла поворота рамы, разместив при этом рядом с ним, например, геркон или датчик Холла. Это упрощает конструкцию и повышает ее надежность.
Выполнение червяка, ось которого совмещена с вертикальной осью поворота рамы и платформы, в виде электрического контакта дает возможность снимать генерируемое напряжение фотоэнергоустановкой, размещенной на поворачивающейся раме, без закручивания провода (кабеля). При этом второй провод идет по «массе». Это исключает перекручивание и возможный обрыв провода, что повышает надежность и улучшает эксплуатационные характеристики.
Выполнение червяка, ось которого совмещена с вертикальной осью поворота рамы и платформы, пустотелым позволяет отводить через него, например, нагретую воду, теплообменник с которой размещен на раме. Это улучшает эксплуатационные характеристики. Выполнение сердцевины червяка, ось которого совмещена с вертикальной осью поворота рамы и платформы, в виде световода позволяет транспортировать сконцентрированные солнечные лучи от системы к потребителю, что также улучшает эксплуатационные характеристики.
Изобретение поясняется чертежами.
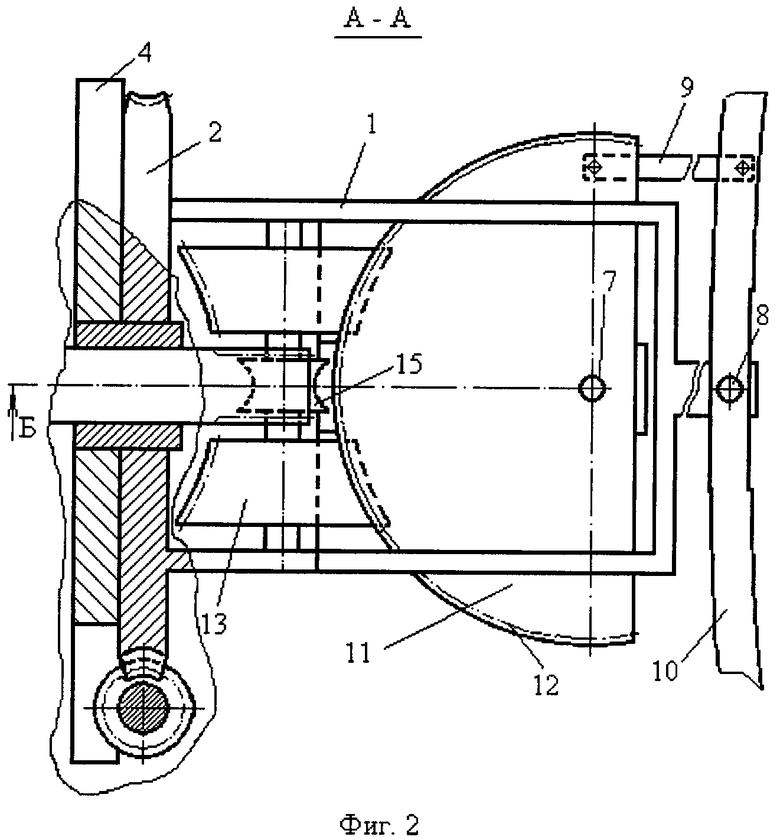
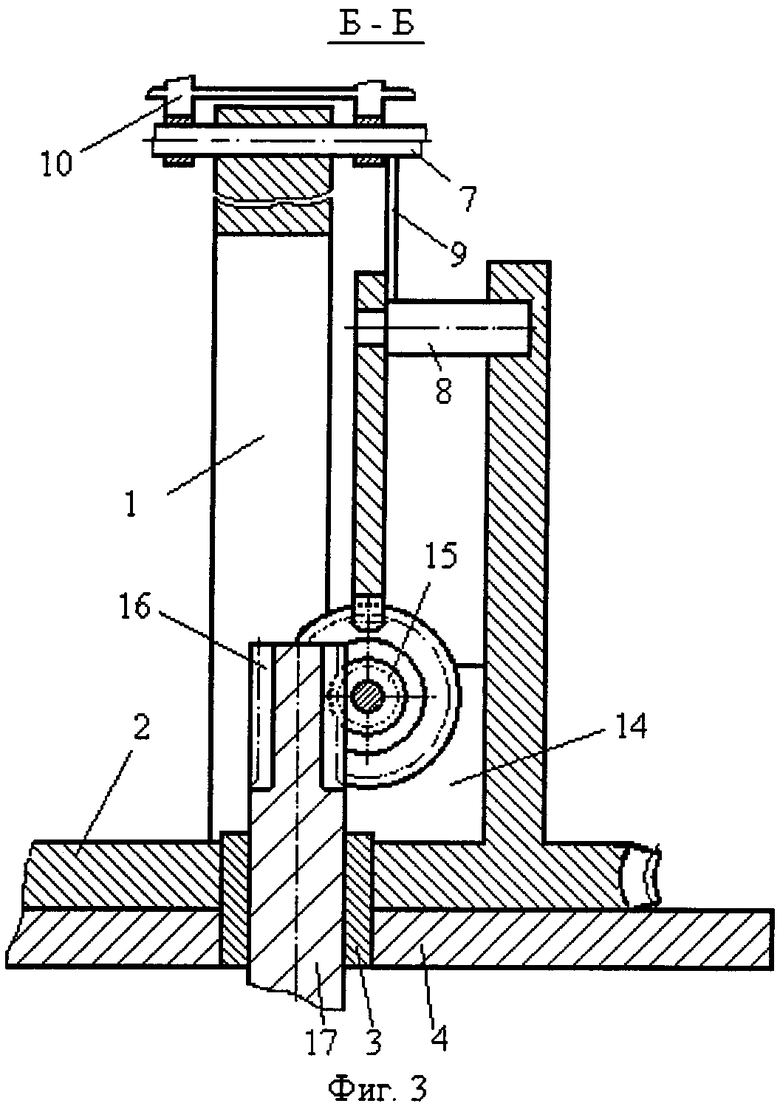
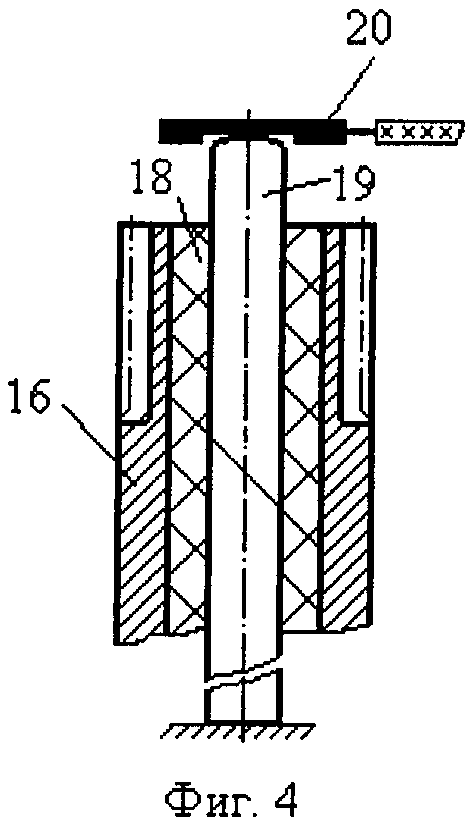
На фиг. 1 изображена схема системы слежения за солнцем. На фиг. 2 изображен разрез Α-A системы. На фиг. 3 изображен разрез Б-Б системы. На фиг. 4 изображен вариант выполнения червяка.
Система слежения за солнцем содержит платформу 1, закрепленную на червячном зубчатом колесе 2, установленном с возможностью поворота на втулке 3, неподвижно закрепленной на основании 4, и сопряженном с червяком 5, соединенным с первым электродвигателем (не показан) и вращающимся в опорах 6 основания. На осях 7, 8 платформы с возможностью поворота соответственно установлены связанные между собой тягой 9 пространственная рама 10 и зубчатый сектор 11, имеющий зубья 12, взаимодействующие с зубьями глобоидного червяка 13, который установлен в пазу 14 платформы 1 с возможностью осевого вращения и имеет жестко закрепленное на оси червячное колесо 15, сопряженное с червяком 16, вал 17 которого установлен во втулке 3 с возможностью вращения и соединен со вторым электродвигателем (не показан), закрепленным на основании 4. Червяк 16 может быть выполнен с изолирующей втулкой 18 и электрическим контактом 19, взаимодействующим с упругим проводником (лепестком) 20 фотоэнергоустановки (не показана), укрепленной на раме. Электрический контакт 19 может быть закреплен в червяке вместе с втулкой неподвижно или установлен с возможностью вращения в ней. В последнем случае он может быть закреплен неподвижно.
Работает система слежения за солнцем следующим образом.
Для поворота пространственной рамы 10 вокруг вертикальной оси включают первый электродвигатель, в результате чего червяк 5 начинает вращаться в опорах 6 и поворачивать на втулке 3 зубчатое колесо 2 вместе с платформой 1 (фиг. 1-3). При этом происходит также поворот в горизонтальной плоскости осей 7, 8 и глобоидного червяка 13 с червячным колесом 15, которое своими зубьями будет скользить по винтовой поверхности червяка 16. Так как угол поворота платформы 1 в процессе очередной коррекции своего положения небольшой, а передаточное отношение от червяка 16 до сектора 11, наоборот, большое, то колесо 15 будет практически стоять на месте при повороте платформы, тем более не будет перемещаться сектор 11 на горизонтальной оси 8. При достижении рамой нужного положения (азимута) выключают первый электродвигатель, обеспечивая за счет самоторможения червячной передачи ее фиксацию.
Для поворота пространственной рамы 10 вокруг горизонтальной оси включают второй электродвигатель, благодаря чему начинают вращаться вал 17 с червяком 16, который посредством зубчатого колеса 15 и связанного с ним червяка 13 поворачивает зубчатый сектор 11 на оси 8. При этом за счет тяги 9 происходит поворот вокруг горизонтальной оси 7 пространственной рамы 10 до требуемого положения, после чего производят ее фиксирование путем выключения двигателя.
Заметим, что, так как первый и второй электродвигатели размещены на основании 4, то механизм системы слежения за солнцем получается максимально облегченным, что позволяет использовать электродвигатели малой мощности на перемещение пространственной рамы, настройку которой можно легко «запоминать» по количеству оборотов червяков.
Для съема электроэнергии, генерируемой фотоэнергоустановкой, червяк 16 выполняют с электрическим контактом 19, при этом один провод подсоединяют к упругому лепестку 20, а в качестве второго проводника используют «массу» (фиг. 4).
Внедрение изобретения позволит создать простую по конструкции, надежную и удобную в эксплуатации систему слежения за солнцем, которая потребляет мало энергии в процессе своей работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ТЕПЛОВОЙ И ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2554168C1 |
| ВЫСТАВНАЯ СДВИЖНАЯ ДВЕРЬ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2559387C1 |
| ПРИВОД ШЛАГБАУМА | 2014 |
|
RU2557127C1 |
| ПРИВОД ЗЕРКАЛА ЗАДНЕГО ВИДА | 2014 |
|
RU2551598C1 |
| МЕХАНИЗМ ПОДЪЕМА МАЧТЫ | 2015 |
|
RU2600240C1 |
| ГОЛОВКА ДЛЯ АБРАЗИВОСТРУЙНОЙ ОЧИСТКИ ПОВЕРХНОСТЕЙ | 2016 |
|
RU2621493C1 |
| УСТРОЙСТВО ДЛЯ ОТКРЫВАНИЯ И ЗАКРЫВАНИЯ СТВОРОК ВОРОТ | 2012 |
|
RU2499872C1 |
| ПОДЪЕМНЫЙ КРАН СО СКЛАДЫВАЮЩЕЙСЯ СТРЕЛОЙ | 2014 |
|
RU2566576C1 |
| МЕХАНИЗМ УБОРКИ-ВЫПУСКА ШАССИ САМОЛЕТА | 2015 |
|
RU2609573C1 |
| РАЗДВИЖНАЯ ДВЕРЬ ЛИФТА | 2015 |
|
RU2609518C1 |
Изобретение относится к гелиоэнергетике и может найти применение при конструировании и изготовлении установок, требующих слежения за солнцем. Система слежения за солнцем содержит датчик угла поворота, платформу, раму с тягой и электрические двигатели, кинематически связанные с рамой и установленные с возможностью перемещать раму вокруг ее горизонтальной и вертикальной геометрических осей. Система, по крайней мере, имеет две кинематические связи, одна из которых выполнена в виде двух червяков со скрещивающимися, взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси одного червяка, размещенного на платформе и взаимодействующего с зубчатым сектором, соединенным с тягой рамы, и сопряжено с другим червяком, ось которого совмещена с вертикальной осью поворота рамы и платформы. Изобретение должно обеспечить упрощение конструкции, повышение надежности и улучшение эксплуатационных характеристик. 8 з.п. ф-лы, 4 ил.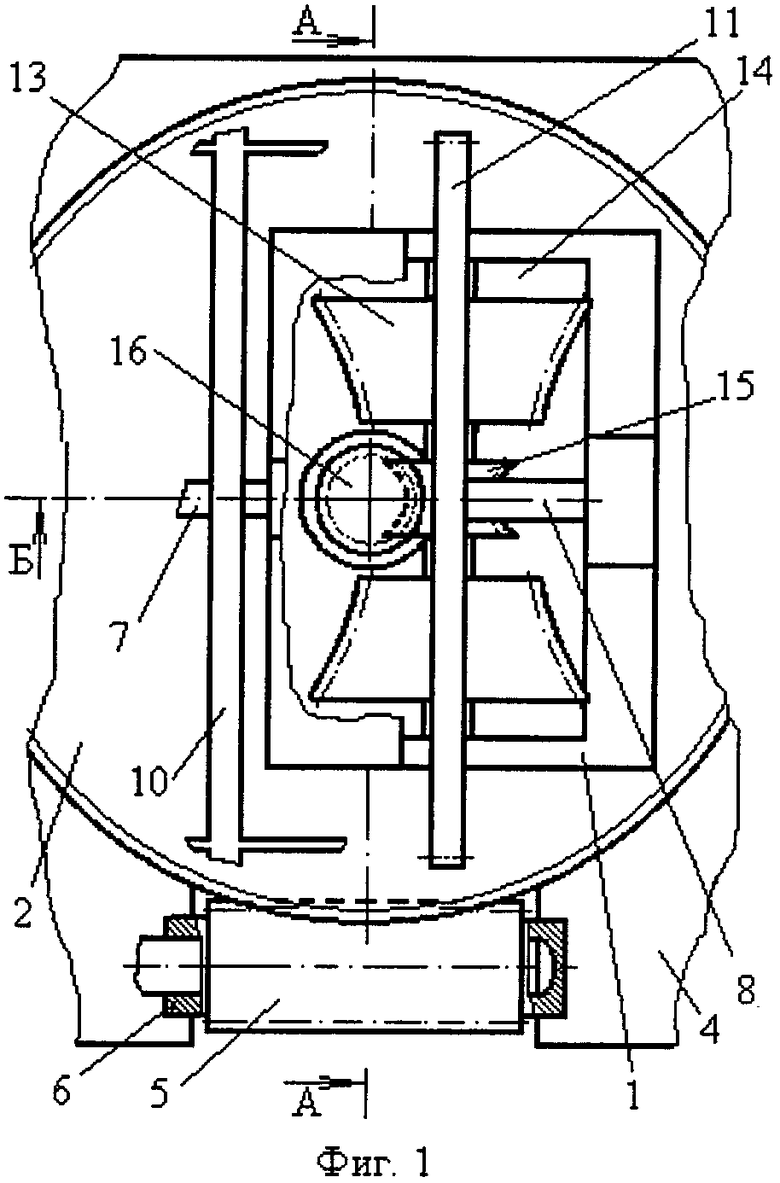
1. Система слежения за солнцем, содержащая датчик угла поворота, платформу, раму с тягой и электрические двигатели, кинематически связанные с рамой и установленные с возможностью перемещать раму вокруг ее горизонтальной и вертикальной геометрических осей, отличающаяся тем, что система, по крайней мере, имеет две кинематические связи, одна из которых выполнена в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси одного червяка, размещенного на платформе и взаимодействующего с зубчатым сектором, соединенным с тягой рамы, и сопряжено с другим червяком, ось которого совмещена с вертикальной осью поворота рамы и платформы.
2. Система по п. 1, отличающаяся тем, что вторая кинематическая связь выполнена в виде червячной пары, колесом которой является платформа.
3. Система по п. 1, отличающаяся тем, что червячное колесо размещено в средней плоскости червяка, взаимодействующего с зубчатым сектором.
4. Система по п. 1, отличающаяся тем, что один червяк выполнен глобоидным.
5. Система по п. 1, отличающаяся тем, что червячная передача выполнена самотормозящейся.
6. Система по п. 1, отличающаяся тем, что червяк намагничен в радиальном направлении.
7. Система по п. 1, отличающаяся тем, что червяк, ось которого совмещена с вертикальной осью поворота рамы и платформы, выполнен в виде электрического контакта.
8. Система по п. 1, отличающаяся тем, что червяк, ось которого совмещена с вертикальной осью поворота рамы и платформы, выполнен пустотелым.
9. Система по п. 1, отличающаяся тем, что сердцевина червяка, ось которого совмещена с вертикальной осью поворота рамы и платформы, выполнена в виде световода.
| СИСТЕМА СЛЕЖЕНИЯ ЗА СОЛНЦЕМ ФОТОЭНЕРГОУСТАНОВКИ | 2011 |
|
RU2488046C2 |
| Способ предохранения от растрескивания лесных сортиментов | 1938 |
|
SU58315A1 |
| Способ повышения контрастности изображения в ультразвуковом дефектоскопе | 1950 |
|
SU94380A1 |
| US 20110240007 A1, 06.10.2011 | |||

