Изобретение относится к автоматическому стрелковому оружию - автоматам, пулеметам, пистолетам, пистолетам-пулеметам.
Известен автомат, см. пат. №2399004, в котором магазин самоотделяется после его опустевания, а затвор встает на затворную задержку. Как правило, современные автоматы имеют два типа автоматики затвора - с оводом пороховых газов или с откатом ствола при коротком его ходе. И те и другие имеют свои недостатки. Оружие с неподвижным стволом и отводом пороховых газов имеет сложную конструкцию - газоотводный канал, газовый цилиндр, газовый поршень со штоком, систему запирания затвора. А оружие с откатом ствола еще сложнее, дороже и чувствительнее к загрязнениям.
Известен также принцип работы автоматики заряжания со свободным затвором. Такое оружие получается простым, дешевым, стойким к загрязнению и очень надежным. Но оно имеет один существенный недостаток - большую массу свободного затвора. Допустим, для патрона типа «Парабеллум» с массой пули 8 г при длине ствола пистолета-пулемета 400 мм примем допустимое смещение гильзы назад без опасности ее раздутия или заклинивания при выстреле 4 мм. То есть затвор должен быть в 100 раз тяжелее пули - 800 г. А с учетом того, что диаметр гильзы несколько больше диаметра пули, затвор должен иметь массу около 1 кг. Это сделает пистолет-пулемет слишком тяжелым. Еще хуже обстоит дело, если диаметр донца гильзы значительно превосходит диаметр пули. Рассмотрим пример выстрела пулей калибром 5,45 мм из ствола длиной 500 мм, причем примем массу пули 5 г, допустимое смещение гильзы 4 мм и считаем, что площадь донца гильзы примерно в четыре раза превосходит площадь канала ствола. Масса свободного затвора должна при этом составить 2,5 кг - столько же, сколько весит весь израильский автомат «Тавр-Стар-21».
Задача и технический результат изобретения - расширения арсенала технических средств.
Как известно, инерция свободного затвора создает силу, временно запирающую затвор. Эта сила, с одной стороны, равна произведению давления в стволе на площадь донца гильзы. А с другой стороны, по третьему закону Ньютона она равна произведению массы затвора на испытываемое им ускорение. Чтобы увеличить запирающую силу, можно увеличить массу затвора, а можно увеличить испытываемое им ускорение.
Способ запирания канала ствола состоит в размещении за ним свободного затвора и отличается от известного тем, что затвор соединен с дополнительной массой с помощью повышающей кинематической передачи.
То есть, чтобы создать нужное запирающее усилие, можно использовать очень небольшую массу, но соединенную со свободным затвором так, что в начальный момент движения затвора она движется с гораздо большей скоростью, то есть с большим ускорением. Соотношение скоростей (или, иначе говоря, линейных перемещений, или ускорений) будем называть «передаточным отношением».
При этом направление движения дополнительного груза может быть любым: назад, вперед, вверх или вниз, по окружности или по дуге переменной кривизны, и в частности - как маховик.
Направление движения дополнительной массы можно выбирать исходя из полезной реакции оружия на него. Например, движение этой массы назад уменьшает усилие отдачи. А расположение при этом дополнительной массы выше центра масс оружия еще и уменьшает «подбрасывающий» момент при выстреле. При некоторых видах движения надо следить, чтобы реакция от перемещения дополнительной массы не сбивала прицел. В этом случае следует применить две симметрично движущиеся массы или маховик. Маховик также может вызывать полезную реакцию оружия, например уменьшение «подбрасывающего» момента. Если и это нежелательно, то следует применить два противоположно вращающихся маховика.
Тип передачи может быть любой из известных. Рассмотрим некоторые варианты.
ВАРИАНТ 1. Оружие, как всегда, содержит ствол, свободный затвор и другие элементы, но затвор имеет зубчатое колесо, одной стороной зацепляющееся с неподвижной зубчатой рейкой, расположенной на корпусе оружия, а другой стороной зубчатое колесо зацепляется с расположенной в направляющих подвижной зубчатой рейкой, на которой крепится дополнительная масса.
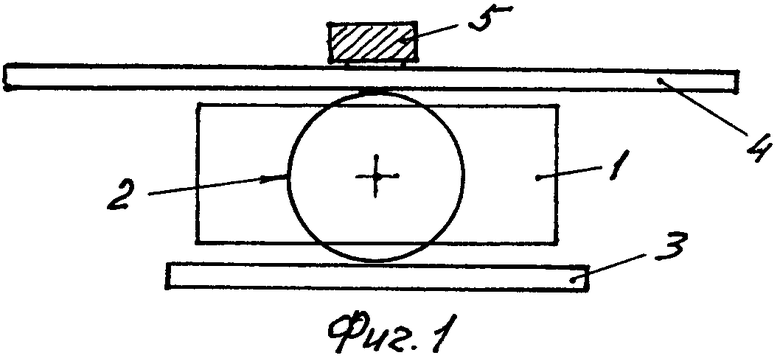
См. фиг.1, где упрощенно показан свободный затвор 1 с зубчатым колесом 2 (колесо может быть одно, например, сверху, а может быть два - справа и слева). Колесо зацепляется с неподвижной зубчатой рейкой 3 и с подвижной зубчатой рейкой 4, на которой размещена дополнительная масса 5. Затвор и/или подвижная зубчатая рейка должны быть подпружинены возвратной пружиной (не показана). Возможен и другой подвариант - крутильной пружиной подпружинено зубчатое колесо (на данном чертеже - в направлении против часовой стрелки).
Работает этот вариант так: при движении затвора 1 назад (все направления даны относительно направления выстрела), допустим, вправо на чертеже, зубчатое колесо 2 прокатывается по неподвижной зубчатой рейке 3 и вращается. Противоположный конец зубчатого колеса вращается в противоположную сторону в два раза быстрее и сдвигает подвижную зубчатую рейку 4 назад с вдвое большей скоростью. То есть передаточное отношение кинематики равно двум. При этом величина дополнительной массы может быть вдвое меньше, чем масса классического свободного затвора.
Досылание нового патрона происходит под действием одной из упомянутых возвратных пружин.
ВАРИАНТ 2. В этом варианте затвор имеет два зубчатых колеса, жестко закрепленных на одной оси, причем малое зубчатое колесо входит в зацепление с неподвижной зубчатой рейкой, а большое - с подвижной зубчатой рейкой, на которой и размещена дополнительная масса.
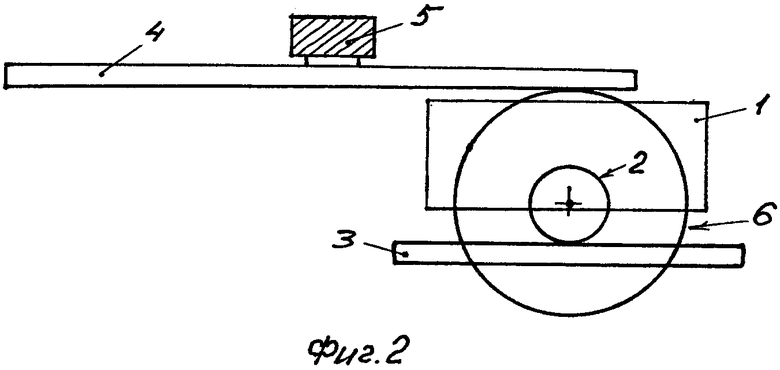
См. фиг.2, где обозначения те же, но 2 - малое зубчатое колесо, 6 - большое.
Работает этот вариант примерно так же, как и первый вариант, но малое колесо 2 через общую ось вращает большое колесо 6, и последнее с гораздо большей скоростью движет подвижную зубчатую рейку 4. Передаточное отношение этой кинематики равно К+1, где К - передаточное отношение зубчатых колес.
Досылание патрона происходит под действием одной из трех упомянутых ранее возвратных пружин. Но зубчатые колеса сравнительно чувствительны к загрязнению, поэтому возможен следующий вариант.
ВАРИАНТ 3. Прогресс в области гидрожидкостей, а именно получение гидрожидкостей с малой вязкостью, малой просачиваемостью и с широким диапазоном рабочих температур позволяет говорить о гидравлическом варианте кинематики. В таком оружии затвор размещен на штоке гидроцилиндра большого диаметра, соединенного трубопроводом с гидроцилиндром малого диаметра, на штоке которого и размещена дополнительная масса.
Учитывая, что направляющей затвора в таком случае является сам гидроцилиндр, такое оружие будет обладать предельной стойкостью к загрязнениям. Повышенное внутреннее трение в жидкости является скорее достоинством, чем недостатком. Ведь это способствует диссипации энергии отката.
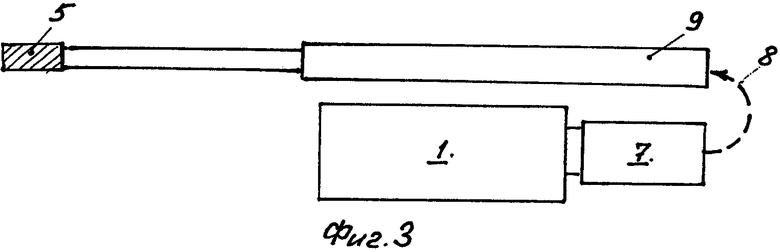
См. фиг.3, где: 7 - большой гидроцилиндр, штоком которого является затвор, 8 - трубопровод, 9 - малый гидроцилиндр, на штоке которого размешена дополнительная масса 5.
Работает этот вариант так: при откате затвора 1 сжимается жидкость в большом гидроцилиндре 7, жидкость перетекает по трубопроводу 8 в малый гидроцилиндр 9 и перемещает дополнительную массу с большей скоростью. Для возврата затвора обратно на штоке малого цилиндра должна быть растягивающаяся пружина (не показана).
Передаточное отношение кинематики равно отношению площадей гидроцилиндров.
ВАРИАНТ 4. Прогресс в области высокопрочных, высокомодульных, термостойких и гибких волокон, таких как углеволокно, вектран, спектра, дайнима, зайлон и т.п., позволяет создать очень перспективную кинематику, используя принцип полиспаста. В таком оружии затвор и/или прилежащая часть оружия имеют шкив (шкивы), через которые протянута нить, соединенная с перемещающейся по любой траектории, например линейно в направляющих, дополнительной массой, причем масса подпружинена возвратной пружиной.
Полиспаст может быть обычной конструкции, когда несколько шкивов размещены на общей оси или для уменьшения габарита по толщине может иметь «плоскую» конструкцию, когда несколько шкивов разного диаметра размещены в одной плоскости.
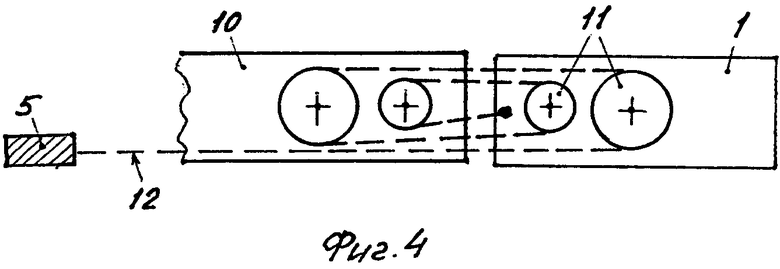
См. фиг.4, где показан затвор с «плоским» полиспастом. На затворе 1 и на прилегающей части оружия 10 размещено по два попарно разновеликих шкива 11, через которые протянута нить 12, одним концом закрепленная на затворе, а вторым концом соединенная с дополнительной массой 5.
Работает этот вариант так: при сдвиге затвора вправо нить 12 вынуждена протягиваться через шкивы 11. Причем из чертежа видно, что при сдвиге затвора на 1 мм, нить сдвигает дополнительную массу на 5 мм (в зазоре между затвором и оружием проходит 5 нитей). То есть передаточное отношение кинематики равно пяти, и дополнительная масса может быть в 5 раз меньше, чем в классическом свободном затворе.
В данном варианте бесполезно подпружинивать возвратной пружиной сам затвор, так как при его возвращении на свое место дополнительная масса 5 на свое место не вернется. Надо подпружинивать именно дополнительную массу (забегая вперед - см. фиг.11). В этом есть и свой «плюс» - затворная часть может быть предельно короткой.
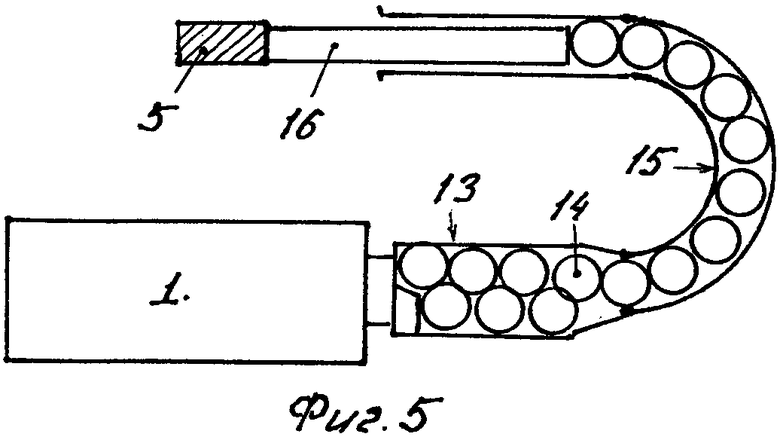
ВАРИАНТ 5. Существует редко используемая механическая передача с помощью шариков или роликов, проходящих по изогнутой трубе. Оружие с такой передачей имеет соединенный с затвором приемник шариков или роликов, соединенных в плоскости в два или более ряда, или соединенных объемно в цилиндре, причем приемник плавно переходит в трубопровод, в котором шарики или ролики могут продвигаться только в один ряд, а на выходе этого трубопровода имеется шток, соединенный с дополнительной массой.
См. фиг.5, где 13 - приемник шариков или роликов 14, 15 - трубопровод, 16 - шток с дополнительной массой 5.
Работает этот вариант так: затвор 1, сдвигаясь вправо, вытесняет шарики 14, находящиеся в приемнике 13 в шахматном порядке, в трубопровод 15, где они перестраиваются в один ряд (как патроны в рожке автомата) и толкают шток 16 с дополнительной массой 5. Передаточное отношение данного варианта кинематики небольшое - всего 1,5.
Все предыдущие варианты имели постоянное передаточное отношение. Из-за этого нельзя было применить большие передаточные отношения. Например, при передаточном числе 10 и при ходе затвора 80 мм ход дополнительной массы составил бы 800 мм. Такую большую длину направляющей трудно обеспечить даже в пулемете, не говоря уже об автомате или пистолете-пулемете. То есть уменьшить дополнительную массу можно реально только в 5-6 раз (что уже неплохо). Чтобы сделать дополнительную массу еще меньше, надо применить кинематику с нелинейным передаточным отношением - в начале отката передаточное отношение должно быть большое - до 15-25, а конце отката оно может значительно уменьшаться. Такими характеристиками обладают кулисные и рычажные системы кинематики.
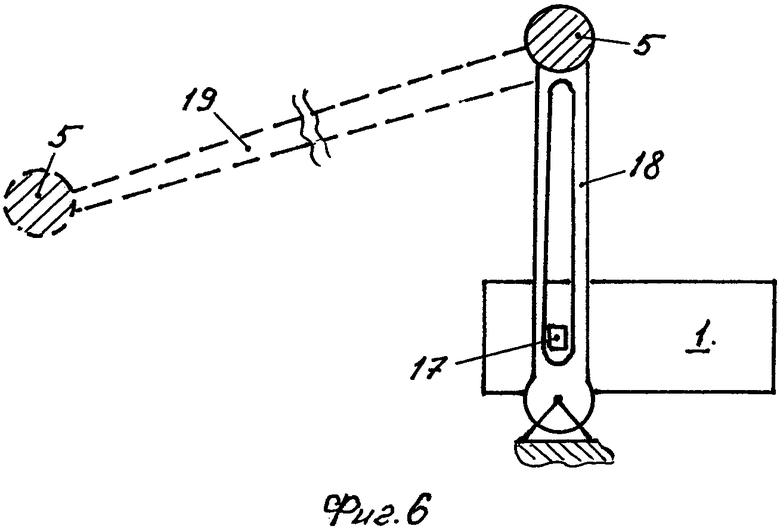
ВАРИАНТ 6. Например, оружие имеет на затворе ползун, а на корпусе оружия - шарнирно закрепленную кулису с дополнительной массой на конце рычага кулисы. Причем прорезь в кулисе может быть сравнительно небольшой длины - чуть больше длины хода затвора, а дополнительная масса может быть размещена на гораздо большем расстоянии от оси вращения. Если это удобно из конструктивных соображений, рычаг кулисы после прорези может изгибаться на угол более 90 градусов.
См. фиг.6, где: 17 - ползун, 18 - кулиса. Причем дополнительная масса 5 может размещаться на конце кулисы, а может размещаться на загнутом конце рычага 19 кулисы (показаны два варианта).
Но кулиса сравнительно чувствительна к загрязнениям.
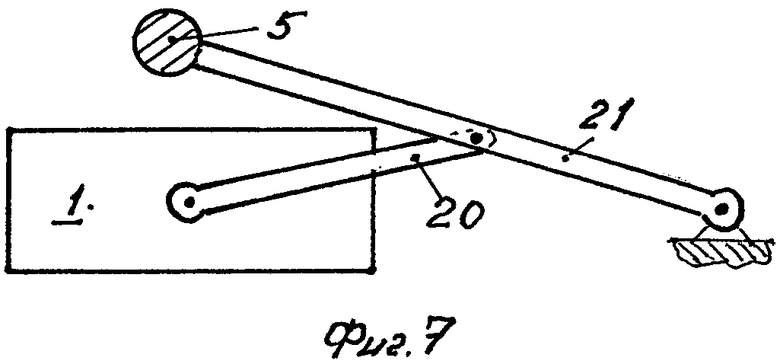
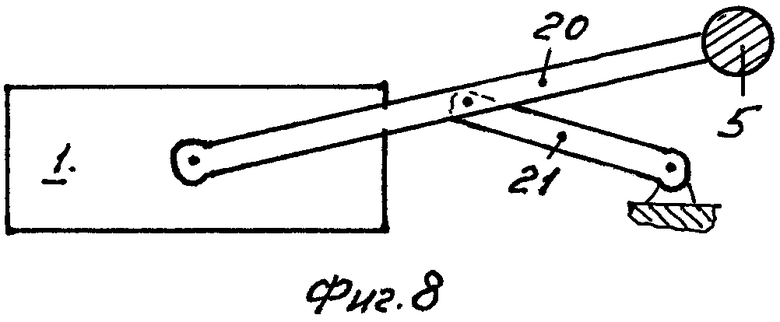
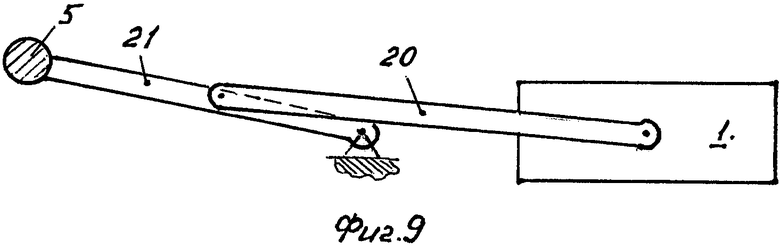
ВАРИАНТ 7. Хорошей грязестойкостью и нужной характеристикой передаточного отношения обладают рычажные системы. В таком оружии на затворе расположен рычаг, шарнирно прикрепленный своей средней частью к другому рычагу, или прикрепленный своим концом к средней части другого рычага, причем другой рычаг крепится к корпусу оружия, а на свободном конце одного из рычагов имеется дополнительная масса.
См. фиг.7, 8, 9, где показаны три варианта рычажных кинематических систем. Здесь: 20 - рычаг, прикрепленный к затвору, 21 - второй рычаг, прикрепленный к корпусу оружия (под корпусом оружия понимается любая его достаточно прочная часть, жестко соединенная со стволом). Затвор, как и на прежних чертежах, - 1, дополнительная масса - 5.
Эти варианты работают так: при ходе затвора 1 вправо рычаг 20, прикрепленный к затвору, перемещает рычаг 21, прикрепленный к корпусу оружия, и это вызывает перемещение дополнительной массы 5. Причем, чем меньше угол между рычагами, то есть, чем ближе они к взаимно параллельному положению, тем больше передаточное отношение (это следует из рассмотрения треугольника «затвор - корпус - стык рычагов»). Теоретически передаточное отношение может достигать бесконечности, но практическим пределом является положение самоторможения, определяемое трением во всех трех шарнирах. При хороших подшипниках скольжения или качения и при «легких» уплотнениях угол самоторможения составит 1-2 градуса, и тогда передаточное отношение, обратное синусу угла при длинной стороне в упомянутом треугольнике, может достигать в первый момент 30-50. Кроме того, дополнительная масса, как показано на фиг.7, 8, 9, может быть расположена не в точке соединения рычагов, а на значительно большем радиусе, что увеличит передаточное отношение вплоть до 100.
Практически следует рассчитывать на передаточное отношение в пределах первичного смещения затвора при выстреле - около 20, что вполне достаточно для создания очень легких образцов оружия.
Здесь следует остановиться на расчете массы такого затвора (назовем его «акселерационный»). В сопротивлении силе отдачи будет участвовать масса самого свободного затвора, которую назовем «реальной» и которая должна быть уменьшена до прочностного предела. Затем в сопротивлении будут участвовать детали, которые движутся неравномерно, например рычаги, маховики. Их массу нужно учитывать в зависимости от характера их движения. Например, рычаги 20 на фиг.7 и 9 движутся вместе с затвором, но почти не вращаются. А вот рычаг 20 на фиг.8 не только движется вместе с затвором, но еще и очень энергично вращается - в зависимости от соотношения длин рычагов он может поворачиваться на угол до 150 градусов. А рычаг 21 на фиг.9 может поворачиваться на угол даже больше 180 градусов. В расчете общей силы сопротивления откату следует учитывать и примерно половину произведения массы на ускорение быстро вращающихся рычагов (удобнее считать по импульсу - произведению массы на безразмерную «относительную» скорость средней части рычага - относительно скорости свободного затвора с учетом передаточного отношения к этим промежуточным звеньям). Назовем это произведение «промежуточной массой». Она может превышать массу рычагов и т.п. в несколько раз. К этой же массе относится и произведение массы возвратной пружины на половину ее относительной скорости. Из чего следует, что пружину выгодно располагать на «быстром» конце кинематики, так как ее масса практически не зависит от того, на «быстром» или на «медленном» конце кинематики она расположена, зато в «промежуточную» массу масса пружины войдет с коэффициентом.
И, наконец, в общем сопротивлении основную роль играет сопротивление быстро движущейся дополнительной массы. Назовем произведение этой массы на передаточное отношение кинематики «виртуальной массой». Сумму всех трех масс назовем «эквивалентной», то есть:
Мэкв.=Мреал.+Мпром.+Мвирт.
Например, в рассмотренном выше примере с автоматом калибра 5,45 мм масса затвора при применении рычажной системы на фиг.9 при начальном передаточном отношении К=20 без учета реальной и промежуточных масс может быть уменьшена с 2,5 кг до 125 г. А с учетом «реальной» массы затвора, допустим, 50 г, с учетом «промежуточной» массы промежуточных рычагов, допустим, 650 г (60 г *10+50 г) и с учетом «промежуточной» массы возвратной пружины, допустим, 1000 г(100 г*10) виртуальная масса составит 800 г, то есть грузик будет массой всего 40 г (800:20=40). Общая масса деталей затвора будет около 50+100+100+40=290 г. Для сравнения, масса всей автоматики автомата Калашникова с конструктивными элементами примерно втрое больше.
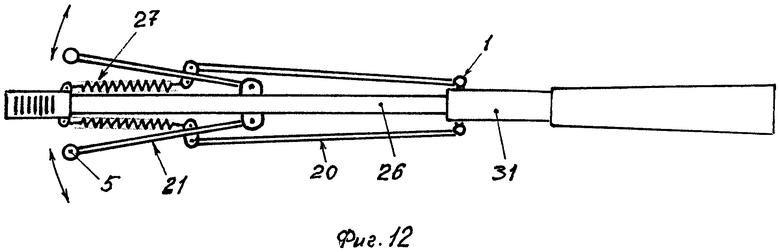
Для ручного пулемета калибром 7,62 на фиг.12 эквивалентная масса будет примерно вдвое больше.
Следует отметить, что для рычажных систем кинематики желательно применять пружины кручения, установленные на оси рычага (рычагов). Это обеспечит очень большое усилие на затворе в конце фазы досылания, что позволит досылать мятые и загрязненные патроны.
ВАРИАНТ 8. Наличие упомянутых современных высокопрочных, высокомодульных, термостойких волокон позволяет применить еще одну перспективную схему кинематики - маховиковую. Такое оружие имеет затвор, соединенный гибкой нитью или цепью (цепь менее удобна) со шкивом, установленным на оси маховика (маховиков), закрепленной на корпусе оружия. Или же на затворе имеется шкив, через который перекинута нить или цепь, одним концом закрепленная на оружии, а другим концом прикрепленная к шкиву маховика. Последний вариант позволяет удвоить передаточное отношение «диаметр шкива - диаметр маховика», так как шкив на затворе является одинарным блоком.
Маховиковый акселерационный затвор не имеет ни полезного, ни вредного реактивного усилия на оружие, но имеет реактивный момент. Его можно полезно использовать, например, для ликвидации подброса оружия при выстреле. Если и этого не нужно, то можно применить два маховика одинаковой массы, вращающихся в разные стороны. Если все же надо оставить небольшой полезный крутящий момент на оружии, то маховики могут быть разной массы или вращаться с разными скоростями (последнее менее целесообразно).
Маховик (маховики) может быть установлен в любом месте оружия, так как направление натяжения нити (совпадающее с направлением отката затвора) можно менять на дополнительном шкиве (шкивах).
Как и в полиспастной системе, возвратная пружины (пружины) должна быть установлена обязательно на маховике (гибкая нить не работает в обратную сторону). Так как маховик имеет сравнительно тонкий диск или спицы и сравнительно толстый обод, где и сосредоточена его основная масса, то конструктивно удобно встроить пружину кручения в маховик.
Нить и шкив могут иметь различные конструктивные особенности, например нить плоского сечения (лента) наматывается на шкив «виток на виток», или нить круглого сечения наматывается на рельефный шкив (то есть с канавками под витки) «виток к витку», причем шкив имеет одинаковый диаметр, или имеет уменьшающийся диаметр, или имеет увеличивающийся диаметр. Шкив с лентой конструктивно проще и имеет меньшие габариты, но передаточное число такой кинематики несколько увеличивается по мере сматывания ленты со шкива, так как лента сматывается по все уменьшающемуся диаметру. Шкив с диаметром, увеличивающимся по мере сматывания нити, имеет наоборот максимальное передаточное отношение кинематики в самом начале фазы отката. Это хорошо с точки зрения гашения отдачи, но вызывает повышенные требования к прочности нити. Но так как имеет значение только скорость вращения маховика в момент окончания «активной» фазы отката (то есть, в момент выхода пули из дула), то первый вариант предпочтительнее.
Оружие с маховиком (маховиками) очень грязестойко - во-первых, сама передача с помощью нити допускает достаточно сильное загрязнение, а во-вторых, нить и маховик легко могут быть закрыты углепластиковым кожухом так, что снаружи не будет никаких движущихся деталей.
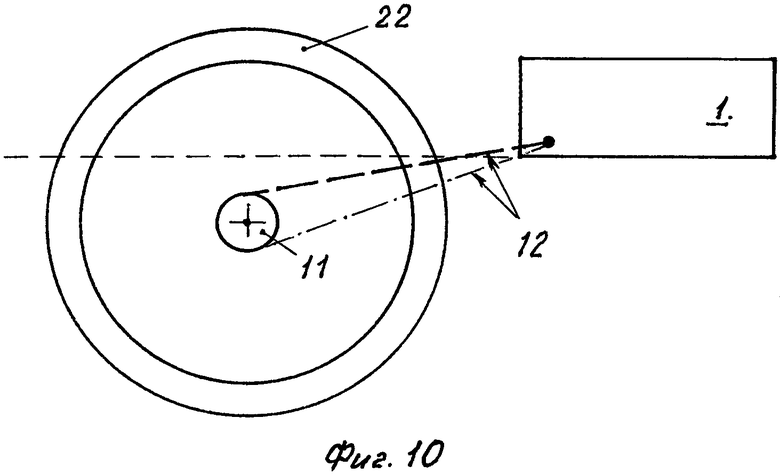
См. фиг.10, где показаны в боковой проекции два маховика, вращающихся в противоположные стороны (имеют разное направление намотки нити), где: 11 - шкивы, 12 - нити, 22 - маховики.
Работает этот вариант так: при выстреле затвор 1 движется вправо и, натягивая нити 12, быстро раскручивает в противоположные стороны два маховика 22. На затворе возникает большая тормозящая сила. В задней точке затвора маховики останавливаются и под действием возвратных крутильных пружин начинают вращаться обратно, наматывая нити и двигая затвор вперед. При этом за счет большой виртуальной массы маховика (за счет его инерции) конечное усилие досылания очень большое. Хотя и меньше, чем в кулисном и в рычажном вариантах (там оно будет больше за счет нелинейности передаточного отношения).
Передаточное отношение маховикового типа акселерационного затвора около 10 (это выражение не совсем корректно, так как обычно маховик характеризуется не массой, а моментом инерции). При применении на затворе дополнительного шкива передаточное отношение еще и удваивается.
Рассмотрим примеры применения акселерационного затвора.
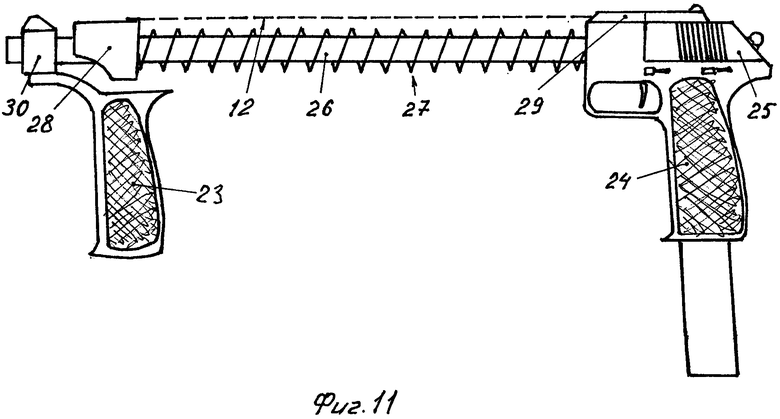
ВАРИАНТ 9. Пистолет-пулемет на фиг.11 состоит из двух ручек 23, 24, максимально легкого свободного затвора-кожуха 25 (аналогичного пистолетному) и ствола 26. На ствол надета возвратная пружина 27, поджимающая грузик 28 в виде втулки, скользяще расположенной на стволе. Грузик соединен нитью 12 с плоским полиспастом 29 (см. фиг.4). На конце ствола имеется компенсирующе-раскручивающий дульный тормоз 30 (компенсирует «подброс» ствола и реакцию оружия от закручивания пули на нарезах).
Грузик 28 должен быть расположен на стволе с достаточным зазором, исключающим температурное заклинивание (ствол желательно изготовить из материала с малым термическим расширением). А также на внутренней поверхности грузика должны быть шлицы для «пропуска» возможных загрязнений.
Работает пистолет-пулемет так: при выстреле затвор-кожух 25 сдвигается назад, через полиспаст 29 и нить 12 он тянет с большой скоростью грузик 28, который сжимает возвратную пружину 27. Энергия отдачи эффективно гасится за счет большой скорости грузика 28, являющегося виртуальной массой. После выстрела грузик 28 возвратной пружиной 27 толкается вперед, и нить 12 тянет через полиспаст 29 затвор-кожух на место.
ВАРИАНТ 10. Пулемет, например, ручной, калибра 7,62 мм на фиг.12 состоит из ствола 26 и ствольной коробки 31 со свободным затвором 1 внутри. Затвор симметрично соединен двумя рычагами 20 со средней частью двух других рычагов 21, крепящихся на стволе и имеющих на концах грузики 5. Причем последние рычаги 21 подпружинены крутильными и/или спиральными возвратными пружинами 27 (показаны спиральные). Пулемет может быть выполнен по обычной схеме с прикладом или может быть сделан по схеме «булл-пап». В последнем случае рычаги 20 будут длиннее, чтобы быстро движущиеся грузики 5 не ударяли по рукам стрелка (ход грузиков может составлять до 150-160 градусов, то есть даже может потребоваться специальная муфта на стволе для гашения ударов грузиков по стволу).
Работает пулемет так: при откате затвора 1 назад рычаги 20 и 21 с большим начальным передаточным отношением (до 50) приводят в движение грузики 5, являющиеся виртуальной массой. Пружины 27 растягиваются, а после хода затвора назад сжимаются, осуществляя через систему рычагов и затвор 1 досылку патрона и возврат затвора.
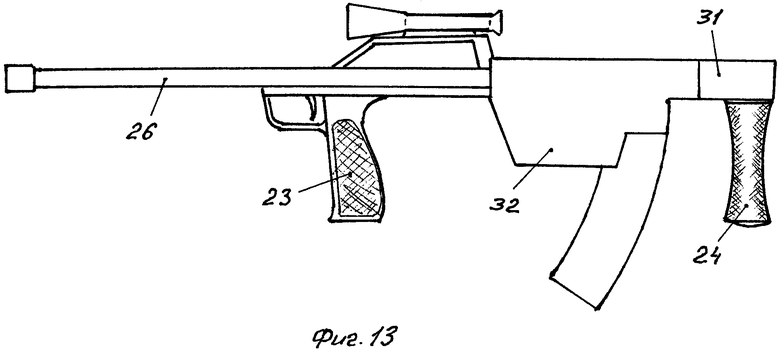
ВАРИАНТ 11. Автомат калибра 5,45 мм на фиг.13 состоит из ствола 26, передней пистолетной ручки 23 и задней вращающейся ручки 24 (реализована концепция «Двухрукояточного оружия» по патенту №2441190, хотя может быть реализован и принцип «булл-пап»). Под стволом на ствольной коробке 31 закреплены два вращающихся в разные стороны маховика, закрытых углепластиковыми кожухами 32. Маховики имеют шкивы с намотанными нитями, соединенными с затвором, и подпружинены крутильными возвратными пружинами (аналогично фиг.10).
Работает автомат так: при выстреле затвор сдвигается назад, через нить раскручивая маховики. Энергия отдачи гасится крутильными пружинами. А после хода затвора назад пружины вращают маховики обратно, осуществляя досылку патрона и возврат затвора.
Применение данного акселерационного затвора позволит создать очень легкие, надежные, неприхотливые, а главное простые и дешевые образцы оружия. У такого оружия только один недостаток - оно непривычно. Но этот недостаток легко исправить. Со временем.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ ОРУЖИЕ-5 /ВАРИАНТЫ/ | 2013 |
|
RU2520700C1 |
| КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ /ВАРИАНТЫ/ | 2014 |
|
RU2557873C1 |
| АВТОМАТИЧЕСКОЕ ОРУЖИЕ /ВАРИАНТЫ/ | 2012 |
|
RU2513885C1 |
| АВТОМАТИЧЕСКОЕ ОРУЖИЕ-12 /ВАРИАНТЫ/ | 2014 |
|
RU2568629C2 |
| ГРЯЗЕЗАЩИЩЕННОЕ ОРУЖИЕ (ВАРИАНТЫ) | 2013 |
|
RU2597631C2 |
| ПОЛУАВТОМАТИЧЕСКОЕ ОРУЖИЕ (ВАРИАНТЫ) | 2013 |
|
RU2557121C2 |
| АВТОМАТИЧЕСКОЕ ОРУЖИЕ-9 (ВАРИАНТЫ) | 2013 |
|
RU2553536C1 |
| УКОРОЧЕННЫЙ ЗАТВОР (ВАРИАНТЫ) | 2013 |
|
RU2535335C1 |
| ДВУХРУКОЯТОЧНОЕ ОРУЖИЕ СТАРОВЕРОВА | 2010 |
|
RU2441190C1 |
| АВТОМАТИЧЕСКОЕ ОРУЖИЕ - 4 /ВАРИАНТЫ/ | 2012 |
|
RU2519571C1 |
Изобретение относится к стрелковому оружию - автоматам, пулеметам, пистолетам, пистолетам-пулеметам. Автоматическое оружие содержит ствол, свободный затвор и другие элементы, но затвор имеет зубчатое колесо, одной стороной зацепляющееся с неподвижной зубчатой рейкой, расположенной на корпусе оружия, а другой стороной зубчатое колесо зацепляется с расположенной в направляющих подвижной зубчатой рейкой, на которой крепится дополнительная масса. В другом варианте затвор имеет два зубчатых колеса разного диаметра, жестко закрепленных на одной оси. Кинематика может быть выполнена и гидравлической, и с помощью полиспаста, работающего на растяжение, а также с помощью шариковой повышающей передачи. Большое передаточное отношение обеспечивают кулисные и рычажные системы кинематики. Рычажные системы могут быть симметричными (вправо-влево). Также возможно применение крутящейся массы в виде маховика или двух противоположно вращающихся маховиков. Достигается расширение арсенала технических средств. 10 н. и 4 з.п. ф-лы, 13 ил.
1. Автоматическое оружие, содержащее ствол и свободный затвор, отличающееся тем, что затвор имеет зубчатое колесо, одной стороной зацепляющееся с неподвижной зубчатой рейкой, расположенной на корпусе оружия, а другой стороной зубчатое колесо зацепляется с расположенной в направляющих подвижной зубчатой рейкой, на которой крепится дополнительная масса.
2. Автоматическое оружие, содержащее ствол и свободный затвор, отличающееся тем, что затвор имеет два зубчатых колеса, жестко закрепленных на одной оси, причем малое зубчатое колесо входит в зацепление с неподвижной зубчатой рейкой, а большое - с подвижной зубчатой рейкой, на которой и размещена дополнительная масса.
3. Автоматическое оружие, содержащее ствол и свободный затвор, отличающееся тем, что затвор размещен на штоке гидроцилиндра большого диаметра, соединенного трубопроводом с гидроцилиндром малого диаметра, на штоке которого и размещена дополнительная масса, причем масса подпружинена возвратной пружиной.
4. Автоматическое оружие, содержащее ствол и свободный затвор, отличающееся тем, что затвор и/или прилежащая часть оружия имеют шкив (шкивы), через которые протянута нить, соединенная с перемещающейся по любой траектории, например линейно в направляющих, дополнительной массой.
5. Автоматическое оружие, содержащее ствол и свободный затвор, отличающееся тем, что имеет соединенный с затвором приемник шариков или роликов, соединенных в плоскости в два или более ряда, или соединенных объемно в цилиндре, причем приемник плавно переходит в трубопровод, в котором шарики или ролики могут продвигаться только в один ряд, а на выходе этого трубопровода имеется шток, соединенный с дополнительной массой.
6. Автоматическое оружие, содержащее ствол и свободный затвор, отличающееся тем, что на затворе расположен рычаг, шарнирно прикрепленный своей средней частью к другому рычагу или прикрепленный своим концом к средней части другого рычага, причем другой рычаг крепится к корпусу оружия, а на свободном конце одного из рычагов имеется дополнительная масса.
7. Автоматическое оружие, содержащее ствол и свободный затвор, отличающееся тем, что имеет затвор, соединенный гибкой нитью или цепью со шкивом, установленным на оси маховика (маховиков), закрепленной на корпусе оружия, или же на затворе имеется шкив, через который перекинута нить или цепь, одним концом закрепленная на оружии, а другим концом прикрепленная к шкиву маховика.
8. Оружие по п. 7, отличающееся тем, что если маховиков два или более, то они имеют одинаковый или разный момент инерции, установлены на одной или на разных осях и вращаются в противоположные стороны.
9. Оружие по п. 7, отличающееся тем, что нить к шкиву маховика (маховиков) проходит через дополнительный шкив (шкивы), на котором меняет направление.
10. Оружие по п. 7, отличающееся тем, что маховик (маховики) имеет встроенную пружину кручения.
11. Оружие по п. 7, отличающееся тем, что нить плоского сечения (лента) наматывается на шкив «виток на виток», или нить круглого сечения наматывается на рельефный шкив «виток к витку», причем шкив имеет одинаковый диаметр, или имеет уменьшающийся диаметр, или имеет увеличивающийся диаметр.
12. Автоматическое оружие, содержащее ствол и свободный затвор, отличающееся тем, что пистолет-пулемет состоит из двух ручек, свободного затвора-кожуха и ствола, причем на ствол надета возвратная пружина, поджимающая грузик в виде втулки, скользяще расположенной на стволе, а грузик соединен нитью с полиспастом.
13. Автоматическое оружие, содержащее ствол и свободный затвор, отличающееся тем, что ручной пулемет состоит из ствола и ствольной коробки со свободным затвором внутри, который симметрично соединен двумя рычагами со средней частью двух других рычагов, крепящихся на стволе и имеющих на концах грузики, причем последние рычаги подпружинены крутильными или спиральными возвратными пружинами.
14. Автоматическое оружие, содержащее ствол и свободный затвор, отличающееся тем, что автомат состоит из ствола, передней и задней ручек, а под стволом на ствольной коробке закреплены два вращающихся в разные стороны маховика, причем маховики имеют шкивы с намотанными нитями или цепями, соединенными с затвором, а также маховики подпружинены крутильными возвратными пружинами.
| DE 29613891 U1, 28.11.1996 | |||
| АВТОМАТИЧЕСКОЕ ОРУЖИЕ (ВАРИАНТЫ) | 2001 |
|
RU2203467C2 |
| 1999 |
|
RU2165577C2 | |
| САМОЗАРЯДНЫЙ ГРАНАТОМЕТ | 2007 |
|
RU2390701C2 |

