Настоящая заявка испрашивает приоритет по патентной заявке США № 61/523,805, «LAPAROSCOPIC DEVICE», которая подана 15 августа 2011 г., описание которой включено в настоящую заявку посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
Область техники
Настоящее изобретение относится к хирургическому оборудованию и, в частности, к хирургическому оборудованию, которое можно применять при минимально инвазивных процедурах. Настоящее изобретение относится также к хирургическому оборудованию для облегчения установки и развертывания окклюзирующего устройства. Кроме того, изобретение относится к хирургическому оборудованию, которое выполнено с возможностью размещения гибких эндоскопов или работы совместно с ними.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Примерные варианты осуществления, раскрытые в настоящей заявке, содержат, по меньшей мере, один активный или пассивный механизм изменения положения. Как подробно поясняется в дальнейшем, активный механизм изменения положения обеспечивает плавные регулировки, когда пользователь физически приводит в действие элемент управления для непосредственной манипуляции изменением положения концевого эффектора. Напротив, пассивный механизм изменения положения можно представить как механизм, действующий подобно выключателю освещения, который либо выключен, либо включен. Таким образом, пассивный механизм изменения положения либо обеспечивает, либо не обеспечивает возможность изменения положения концевого эффектора, но не отвечает за активное манипулирование положением концевого эффектора. Иначе говоря, пассивная система изменения положения допускает свободное перемещение концевого эффектора в пределах диапазона движений концевого эффектора, когда механизм находится во «включенном» положении, но блокирует перемещение концевого эффектора в пределах диапазона движений концевого эффектора, когда механизм находится в «выключенном» положении. В примерном варианте, лапароскопическое устройство может включать в себя как активный, так и пассивный механизм изменения положения для управления перемещениями в разных направлениях, например, углами поворота вокруг поперечной и вертикальной осей.
Примерные варианты осуществления включают в себя также активный механизм изменения положения, который обеспечивает некоторое преобразование движения. Другими словами, девяностоградусное изменение положения в устройстве управления будет иметь следствием сорока пятиградусное изменение положения на концевом эффекторе. Как раскрывается в настоящей заявке, некоторые параметры можно модифицировать для обеспечения другого преобразования движения, в зависимости от конечного применения и пользовательского предпочтения.
В соответствии с первым аспектом настоящего изобретения предлагается медицинский инструмент, содержащий: (a) первое сочленение, содержащее первый элемент и второй элемент, при этом, первый элемент сконфигурирован с возможностью изменения положения относительно второго элемента в плоскости X-Y; (b) второе сочленение, имеющее рабочее соединение с первым сочленением, причем, второе сочленение содержит третий элемент и четвертый элемент, причем, третий элемент сконфигурирован с возможностью изменения положения относительно четвертого элемента в плоскости Y-Z, перпендикулярной плоскости X-Y; и (c) устройство управления, имеющее рабочее соединение с первым сочленением и вторым сочленением, причем, устройство управления содержит первый элемент управления, сконфигурированный с возможностью направления изменения положения, по меньшей мере, одного из первого элемента и второго элемента, и второй элемент управления, сконфигурированный с возможностью направления изменения положения, по меньшей мере, одного из третьего элемента и четвертого элемента.
В конкретном варианте осуществления первого аспекта, первый элемент управления содержит пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение первого элемента относительно второго элемента в плоскости X-Y, и вторым положением, которое сдерживает перемещение первого элемента относительно второго элемента в плоскости X-Y, и второй элемент управления содержит активный элемент управления, сконфигурированный с возможностью изменения положения между неограниченным числом положений, при этом, каждое из неограниченного числа положений ориентирует третий элемент относительно четвертого элемента в отличающееся положение в плоскости Y-Z. В еще одном конкретном варианте осуществления, пассивный элемент управления содержит рычаг, установленный с возможностью изменения положения на корпусе устройства управления, при этом, рычаг соединен с тросом пассивного управления, и трос пассивного управления также соединен с переустанавливаемым захватом, сконфигурированным с возможностью зацепления, по меньшей мере, одного из первого элемента и второго элемента, чтобы сдерживать перемещение первого элемента относительно второго элемента в плоскости X-Y. В дополнительном конкретном варианте осуществления, переустанавливаемый захват поджат с помощью пружины, чтобы сдерживать перемещение первого элемента относительно второго элемента в плоскости X-Y, и рычаг сконфигурирован с возможностью изменения положения для натяжения троса пассивного управления, чтобы преодолевать поджимное усилие пружины для обеспечения возможности перемещения первого элемента относительно второго элемента в плоскости X-Y. В еще одном дополнительном конкретном варианте осуществления, инструмент дополнительно содержит продольную трубку, продолжающуюся между устройством управления и первым сочленением, при этом, по меньшей мере, участок пассивного элемента управления продолжается через продольную трубку. В более конкретном варианте осуществления, инструмент дополнительно содержит продольную трубку, продолжающуюся между устройством управления и первым сочленением, при этом, первый элемент установлен на устройстве управления, и второй элемент установлен с возможностью изменения положения на первом элементе. В более конкретном варианте осуществления, первый элемент является удлиненным и содержит внутреннюю полость, которая, по меньшей мере, частично вмещает переустанавливаемый захват для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y, и, по меньшей мере, что-то одно из первого элемента и продольной трубки вмещает пружину, поджимающую переустанавливаемый захват для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y. В другом конкретном варианте осуществления, по меньшей мере, один из первого элемента и второго элемента содержит выступ, по меньшей мере, один из первого элемента и второго элемента содержит полость, сконфигурированную с возможностью вмещения выступа, полость, по меньшей мере, частично ограничена опорной поверхностью, и выступ сконфигурирован с возможностью контакта с опорной поверхностью, когда происходит перемещение первого элемента относительно второго элемента в плоскости X-Y. В еще одном конкретном варианте осуществления, первый элемент содержит полость, второй элемент содержит выступ, переустанавливаемый захват содержит, по меньшей мере, один зуб, и второй элемент содержит, по меньшей мере, один зуб, сконфигурированный с возможностью зацепления, по меньшей мере, одного зуба переустанавливаемого захвата, для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y. В еще одном конкретном варианте осуществления, полость содержит первую полость и вторую полость, разнесенные между собой и обращенные одна к другой, выступ содержит первый выступ и второй выступ, разнесенные между собой и обращенные один от другого, первая полость сконфигурирована с возможностью вмещения первого выступа, и вторая полость сконфигурирована с возможностью вмещения второго выступа.
В еще одном конкретном варианте осуществления первого аспекта, первый элемент содержит вилку, и второй элемент содержит шарнир. В еще одном конкретном варианте осуществления, первый элемент управления содержит пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение первого элемента относительно второго элемента в плоскости X-Y, и вторым положением, которое сдерживает перемещение первого элемента относительно второго элемента в плоскости X-Y, вилка содержит внутреннюю полость, которая, по меньшей мере, частично вмещает переустанавливаемый захват и поджимную пружину, переустанавливаемый захват содержит участок первого элемента управления, первый элемент управления содержит также приводной механизм, установленный с возможностью изменения положения на устройстве управления, и первый элемент управления дополнительно содержит нить, одновременно соединенную с приводным механизмом и переустанавливаемым захватом. В дополнительном конкретном варианте осуществления, шарнир содержит первый полушарнир и второй полушарнир, и первый полушарнир и второй полушарнир являются идентичными. В еще одном дополнительном конкретном варианте осуществления, активный элемент управления содержит приводной механизм, установленный с возможностью изменения положения на корпусе устройства управления, при этом, приводной механизм имеет рабочее соединение с тросом активного управления, и трос активного управления соединен с, по меньшей мере, одним из третьего элемента и четвертого элемента, чтобы управлять перемещением третьего элемента относительно четвертого элемента в плоскости Y-Z. В конкретном варианте осуществления, приводной механизм содержит барабан и соединительную пластину, барабан содержит спиральную полость, и соединительная пластина содержит выступ, сконфигурированный с возможностью вмещения в спиральную полость барабана. В конкретном варианте осуществления, приводной механизм содержит барабан и соединительную пластину, соединительная пластина содержит спиральную полость, и барабан содержит выступ, сконфигурированный с возможностью вмещения в спиральную полость соединительной пластины. В другом конкретном варианте осуществления, приводной механизм содержит барабан и соединительную пластину, соединительная пластина содержит полость, и барабан содержит спиральный выступ, сконфигурированный с возможностью вмещения в полость соединительной пластины. В еще одном конкретном варианте осуществления, приводной механизм содержит барабан и соединительную пластину, барабан содержит полость, и соединительная пластина содержит спиральный выступ, сконфигурированный с возможностью вмещения в полость барабана.
В конкретном варианте осуществления первого аспекта, второй элемент управления содержит активный элемент управления, сконфигурированный с возможностью изменения положения между неограниченным числом положений, при этом, каждое из неограниченного числа положений ориентирует третий элемент относительно четвертого элемента в отличающееся положение в плоскости Y-Z, второй элемент установлен на третьем элементе, и третий элемент установлен с возможностью изменения положения на четвертом элементе. В еще одном конкретном варианте осуществления, четвертый элемент является удлиненным и содержит внутреннюю полость, которая, по меньшей мере, частично вмещает переустанавливаемое натяжное звено, и четвертый элемент содержит паз, сконфигурированный с возможностью вмещения, по меньшей мере, участка троса активного управления. В дополнительном конкретном варианте осуществления, паз содержит первый изогнутый сегмент и второй изогнутый сегмент, трос активного управления содержит первый трос активного управления и второй трос активного управления, первый изогнутый сегмент сконфигурирован с возможностью вмещения первого троса активного управления, второй изогнутый сегмент сконфигурирован с возможностью вмещения второго троса активного управления, по меньшей мере, участок первого троса активного управления закреплен к четвертому элементу, и, по меньшей мере, участок второго троса активного управления закреплен к четвертому элементу. В еще одном дополнительном конкретном варианте осуществления, по меньшей мере, один из третьего элемента и четвертого элемента содержит выступ, по меньшей мере, один из третьего элемента и четвертого элемента содержит полость, сконфигурированную с возможностью вмещения выступа, полость, по меньшей мере, частично ограничена опорной поверхностью, и выступ сконфигурирован с возможностью контакта с опорной поверхностью, когда происходит перемещение третьего элемента относительно четвертого элемента в плоскости Y-Z. В конкретном варианте осуществления, четвертый элемент содержит полость, и третий элемент содержит выступ. В конкретном варианте осуществления, полость содержит первую полость и вторую полость, разнесенные между собой и обращенные одна от другой, выступ содержит первый выступ и второй выступ, разнесенные между собой и обращенные один к другому, первая полость сконфигурирована с возможностью вмещения первого выступа, и вторая полость сконфигурирована с возможностью вмещения второго выступа. В другом конкретном варианте осуществления, второй элемент управления содержит активный элемент управления, сконфигурированный с возможностью изменения положения между неограниченным числом положений, при этом, каждое из неограниченного числа положений ориентирует третий элемент относительно четвертого элемента в отличающееся положение в плоскости Y-Z, третий элемент содержит шарнир, и четвертый элемент содержит скобу. В еще одном конкретном варианте осуществления, активный элемент управления содержит приводной механизм, установленный с возможностью изменения положения на корпусе устройства управления, при этом, приводной механизм имеет рабочее соединение с первым тросом активного управления и вторым тросом активного управления, скоба содержит внутреннюю полость, которая, по меньшей мере, частично вмещает переустанавливаемое натяжное звено, скоба содержит первый паз, сконфигурированный с возможностью вмещения, по меньшей мере, участка первого троса активного управления, и второй паз, сконфигурированный с возможностью вмещения, по меньшей мере, участка второго троса активного управления, по меньшей мере, участок первого троса активного управления и участок второго троса активного управления закреплены к скобе. В еще одном конкретном варианте осуществления, второй элемент и третий элемент закреплены один к другому, и второй элемент и третий элемент совместно формируют шарнир.
В еще одном конкретном варианте осуществления первого аспекта, приводной механизм содержит первый барабан, первую соединительную пластину, второй барабан и вторую соединительную пластину, первый и второй барабаны содержат, каждый, спиральную полость, первая и вторая соединительные пластины содержат, каждая, выступ, сконфигурированный с возможностью вмещения в соответствующую спиральную полость первого и второго барабанов, первый трос активного управления соединен с первой соединительной пластиной, и второй трос активного управления соединен со второй соединительной пластиной. В еще одном конкретном варианте осуществления, первый барабан является зеркальным отображением второго барабана. В дополнительном конкретном варианте осуществления, спиральная полость каждого из первого и второго барабанов содержит изогнутую стенку, которая ограничивает спиральную полость, и выступ каждой из первой и второй соединительной пластин содержит криволинейную поверхность, которая сконфигурирована с возможностью контакта с изогнутой стенкой соответствующей спиральной полости. В еще одном конкретном варианте осуществления, первый элемент управления содержит первый пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение первого элемента относительно второго элемента в плоскости X-Y, и вторым положением, которое сдерживает перемещение первого элемента относительно второго элемента в плоскости X-Y, и второй элемент управления содержит второй пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение третьего элемента относительно четвертого элемента в плоскости Y-Z, и вторым положением, которое сдерживает перемещение третьего элемента относительно четвертого элемента в плоскости Y-Z. В конкретном варианте осуществления, первый пассивный элемент управления содержит приводной механизм, установленный с возможностью изменения положения на корпусе устройства управления, при этом, приводной механизм соединен с первым тросом пассивного управления, и первый трос пассивного управления соединен также с, по меньшей мере, одним из первого элемента и второго элемента для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y. В конкретном варианте осуществления, приводной механизм сконфигурирован с возможностью изменения положения для допуска перемещения первого элемента относительно второго элемента в плоскости X-Y. В другом конкретном варианте осуществления,. В еще одном конкретном варианте осуществления, первый элемент является удлиненным и содержит внутреннюю полость, которая, по меньшей мере, частично вмещает переустанавливаемый захват для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y, и, по меньшей мере, что-то одно из первого элемента и продольной трубки вмещает пружину, поджимающую переустанавливаемый захват для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y.
В конкретном варианте осуществления первого аспекта, по меньшей мере, один из первого элемента и второго элемента содержит выступ, по меньшей мере, один из первого элемента и второго элемента содержит полость, сконфигурированную с возможностью вмещения выступа, полость, по меньшей мере, частично ограничена опорной поверхностью, и выступ сконфигурирован с возможностью контакта с опорной поверхностью, когда происходит перемещение первого элемента относительно второго элемента в плоскости X-Y. В еще одном конкретном варианте осуществления, первый элемент содержит полость, второй элемент содержит выступ, переустанавливаемый захват содержит, по меньшей мере, один зуб, и второй элемент содержит, по меньшей мере, один зуб, сконфигурированный с возможностью зацепления, по меньшей мере, одного зуба переустанавливаемого захвата для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y. В дополнительном конкретном варианте осуществления, полость содержит первую полость и вторую полость, разнесенные между собой и обращенные одна к другой, выступ содержит первый выступ и второй выступ, разнесенные между собой и обращенные один от другого, первая полость сконфигурирована с возможностью вмещения первого выступа, и вторая полость сконфигурирована с возможностью вмещения второго выступа. В еще одном дополнительном конкретном варианте осуществления, первый элемент содержит вилку, и второй элемент содержит шарнир. В конкретном варианте осуществления, вилка содержит внутреннюю полость, которая, по меньшей мере, частично вмещает переустанавливаемый захват и поджимную пружину, переустанавливаемый захват содержит участок первого элемента управления, первый элемент управления содержит также приводной механизм, установленный с возможностью изменения положения на устройстве управления, и первый элемент управления дополнительно содержит нить, одновременно соединенную с приводным механизмом и переустанавливаемым захватом. В конкретном варианте осуществления, шарнир содержит первый полушарнир и второй полушарнир, и первый полушарнир и второй полушарнир являются идентичными. В другом конкретном варианте осуществления, второй элемент управления содержит приводной механизм, установленный с возможностью изменения положения на корпусе устройства управления, при этом, приводной механизм имеет рабочее соединение с тросом пассивного управления, и трос пассивного управления соединен с, по меньшей мере, одним из третьего элемента и четвертого элемента, чтобы управлять перемещением третьего элемента относительно четвертого элемента в плоскости Y-Z. В еще одном конкретном варианте осуществления, приводной механизм содержит нажимную кнопку, продолжающуюся сквозь корпус устройства управления, которая сконфигурирована с возможностью зацепления с ловителем, приводной механизм содержит, по меньшей мере, один зуб, и ловитель содержит, по меньшей мере, один зуб, сконфигурированный с возможностью селективного зацепления с, по меньшей мере, одним зубом приводного механизма. В еще одном конкретном варианте осуществления, приводной механизм установлен с возможностью изменения положения на корпусе устройства управления, при этом, приводной механизм содержит участок первого элемента управления и участок второго элемента управления, первый пассивный элемент управления содержит первый ловитель, установленный с возможностью изменения положения на корпусе устройства управления, причем, первый ловитель имеет рабочее соединение с первым тросом, закрепленным к, по меньшей мере, одному из первого элемента и второго элемента, и второй пассивный элемент управления содержит второй ловитель, установленный с возможностью изменения положения на корпусе устройства управления, причем, второй ловитель имеет рабочее соединение со вторым тросом, закрепленным к, по меньшей мере, одному из третьего элемента и четвертого элемента.
В еще одном конкретном варианте осуществления первого аспекта, приводной механизм содержит нажимную кнопку, которая поджата пружиной, при этом, приводной механизм сконфигурирован с возможностью изменения положения между первым положением и вторым положением, причем, первое положение допускает свободное перемещение первого элемента относительно второго элемента в плоскости X-Y и допускает свободное перемещение третьего элемента относительно четвертого элемента в плоскости Y-Z, причем, второе положение сдерживает свободное перемещение первого элемента относительно второго элемента в плоскости X-Y и сдерживает свободное перемещение третьего элемента относительно четвертого элемента в плоскости Y-Z, приводной механизм является фиксируемым в первом положении, приводной механизм не входит в зацепление с первым ловителем или вторым ловителем в первом положении, и приводной механизм входит в зацепление с первым ловителем и вторым ловителем во втором положении. В еще одном конкретном варианте осуществления, приводной механизм содержит нажимную кнопку, которая поджата пружиной в зацепление с первым ловителем и вторым ловителем, первый и второй ловители допускают поворотное изменение положения на общей втулке, продолжающейся внутри устройства управления, когда не зацеплены нажимной кнопкой, и первый и второй ловители не допускают поворотное изменение положения на общей втулке, когда зацеплены нажимной кнопкой. В дополнительном конкретном варианте осуществления, инструмент дополнительно содержит концевой эффектор, имеющий рабочее соединение с первым и вторым сочленениями. В еще одном дополнительном конкретном варианте осуществления, концевой эффектор содержит, по меньшей мере, что-то одно из хирургического диссектора, абляционного наконечника, окклюзирующего зажима, аппликатора окклюзирующего зажима, хирургических щипцов, хирургических браншей, линейного режущего устройства, зажима для абляции и абляционного направляющего электрода. В конкретном варианте осуществления, устройство управления содержит третий элемент управления, имеющий рабочее соединение с концевым эффектором. В конкретном варианте осуществления, концевой эффектор содержит устройство установки зажима, и третий элемент управления содержит тягу, которая продолжается от устройства управления к концевому эффектору, для управления изменением положения, по меньшей мере, участка устройства установки зажима. В другом конкретном варианте осуществления, устройство установки зажима содержит противоположные бранши, разъемно соединенные с окклюзирующим зажимом, и тяга сконфигурирована с возможностью изменения положения для вывода окклюзирующего зажима из соединения с противоположными браншами. В еще одном конкретном варианте осуществления, противоположные бранши содержат, каждая, небольшое отверстие, через которое продолжается нить, нити соединены с окклюзирующим зажимом, и тяга разъемно соединена с нитями.
В еще одном конкретном варианте осуществления первого аспекта, нить содержит нитяную петлю, и тяга расположена между нитяной петлей и окклюзирующим зажимом. В соответствии с другим аспектом изобретения, концевой эффектор содержит устройство установки зажима, и третий элемент управления содержит тягу, которая продолжается от устройства управления к концевому эффектору, для управления изменением положения, по меньшей мере, участка устройства установки зажима. Кроме того, в еще одном конкретном варианте осуществления, второе сочленение содержит паз, по которому предусмотрен проход натяжного звена, при этом, натяжное звено имеет рабочее соединение с третьим элементом управления и устройством установки зажима, и, причем, устройство установки зажима содержит, по меньшей мере, два соединительных зажима, имеющих рабочее соединение с натяжным звеном, причем, каждый из, по меньшей мере, двух соединительных зажимов имеет некруглый кулачок, который двигается по криволинейной поверхности, по меньшей мере, одной из двух браншей, причем, по меньшей мере, два соединительных зажима сконфигурированы с возможностью поворота относительно двух браншей, пока взаимодействие между кулачком и криволинейной поверхностью не блокирует дальнейшей поворот.
В соответствии со вторым аспектом настоящего изобретения предлагается медицинский инструмент, содержащий: (a) устройство управления, по меньшей мере, частично вмещающее множество элементов управления; (b) удлиненную трубку, осуществляющую рабочее соединение устройства управления с первым сочленением и вторым сочленением; (c) первое сочленение, содержащее первый элемент и второй элемент, при этом, первый элемент сконфигурирован с возможностью изменения положения относительно второго элемента в плоскости X-Y; (d) второе сочленение, имеющее рабочее соединение с первым сочленением, причем, второе сочленение содержит третий элемент и четвертый элемент, причем, третий элемент сконфигурирован с возможностью изменения положения относительно четвертого элемента в плоскости Y-Z, перпендикулярной плоскости X-Y; и (e) концевой эффектор, имеющий рабочее соединение с первым и вторым сочленениями, причем, множество элементов управления содержит первый элемент управления, имеющий рабочее соединение с первым сочленением, для управления движением первого элемента относительно второго элемента в плоскости X-Y, второй элемент управления, имеющий рабочее соединение со вторым сочленением, для управления движением третьего элемента относительно четвертого элемента в плоскости Y-Z, третий элемент управления, имеющий рабочее соединение с концевым эффектором, для управления движением, по меньшей мере, участка концевого эффектора.
В конкретном варианте осуществления второго аспекта, инструмент дополнительно содержит окклюзирующий зажим, установленный с возможностью снятия на концевом эффекторе, при этом, множество элементов управления содержит четвертый элемент управления для снятия окклюзирующего зажима с концевого эффектора. В еще одном конкретном варианте осуществления, первый элемент управления содержит пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение первого элемента относительно второго элемента в плоскости X-Y, и вторым положением, которое сдерживает перемещение первого элемента относительно второго элемента в плоскости X-Y, и второй элемент управления содержит активный элемент управления, сконфигурированный с возможностью изменения положения между неограниченным числом положений, при этом, каждое из неограниченного числа положений ориентирует третий элемент относительно четвертого элемента в отличающееся положение в плоскости Y-Z. В дополнительном конкретном варианте осуществления, третий элемент управления содержит второй активный элемент управления, сконфигурированный с возможностью изменения положения между неограниченным числом положений, при этом, каждое из неограниченного числа положений ориентирует концевой эффектор в отличающее положение. В еще одном дополнительном конкретном варианте осуществления, инструмент дополнительно содержит окклюзирующий зажим, установленный с возможностью снятия на концевом эффекторе, при этом, множество элементов управления содержит четвертый элемент управления для снятия окклюзирующего зажима с концевого эффектора, причем, четвертый элемент управления содержит пассивный элемент управления, сконфигурированный с возможностью либо разъема, либо фиксации соединения между концевым эффектором и окклюзирующим зажимом. В конкретном варианте осуществления, первый элемент управления содержит первый пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение первого элемента относительно второго элемента в плоскости X-Y, и вторым положением, которое сдерживает перемещение первого элемента относительно второго элемента в плоскости X-Y, и второй элемент управления содержит второй пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение третьего элемента относительно четвертого элемента в плоскости Y-Z, и вторым положением, которое сдерживает перемещение третьего элемента относительно четвертого элемента в плоскости Y-Z. В конкретном варианте осуществления, третий элемент управления содержит активный элемент управления, сконфигурированный с возможностью изменения положения между неограниченным числом положений, при этом, каждое из неограниченного числа положений ориентирует концевой эффектор в отличающееся положение.
В еще одном конкретном варианте осуществления второго аспекта, первый элемент управления содержит первый пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение первого элемента относительно второго элемента в пределах, по меньшей мере, девяноста градусов в плоскости X-Y, и вторым положением, которое сдерживает перемещение первого элемента относительно второго элемента в плоскости X-Y, и второй элемент управления содержит второй пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение третьего элемента относительно четвертого элемента в пределах, по меньшей мере, девяноста градусов в плоскости Y-Z, и вторым положением, которое сдерживает перемещение третьего элемента относительно четвертого элемента в плоскости Y-Z. В еще одном конкретном варианте осуществления, первый элемент управления содержит пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение первого элемента относительно второго элемента в пределах, по меньшей мере, девяноста градусов в плоскости X-Y, и вторым положением, которое сдерживает перемещение первого элемента относительно второго элемента в плоскости X-Y, и второй элемент управления содержит активный элемент управления, сконфигурированный с возможностью изменения положения между неограниченным числом положений в пределах, по меньшей мере, девяноста градусов в плоскости Y-Z, при этом, каждое из неограниченного числа положений ориентирует третий элемент относительно четвертого элемента в отличающееся положение в плоскости Y-Z. В дополнительном конкретном варианте осуществления, активный элемент управления содержит первый барабан, содержащий первую спиральную полость, сформированную в данном барабане, и второй барабан, содержащий вторую спиральную полость, сформированную в данном барабане, при этом, первая и вторая спиральные полости являются зеркальными отображениями одна другой, активный элемент управления содержит также первую соединительную пластину, соединенную с первым соединительным тросом, и вторую соединительную пластину, соединенную со вторым соединительным тросом, первая соединительная пластина содержит первый выступ, сконфигурированный с возможностью вмещения в первую спиральную полость, вторая соединительная пластина содержит второй выступ, сконфигурированный с возможностью вмещения во вторую спиральную полость, причем, первый барабан и второй барабан соединены между собой таким образом, что поворот одного барабана приводит к соответствующему повороту другого барабана, причем, поворот в первом направлении вызывает натяжение первого соединительного троса и не второго соединительного троса, а поворот во втором направлении, противоположном первому направлению, вызывает натяжение второго соединительного троса и не первого соединительного троса, и, причем, натяжение первого соединительного троса вызывает перемещение в положительном X-направлении в плоскости Y-Z, а натяжение второго соединительного троса вызывает перемещение в отрицательном X-направлении в плоскости Y-Z. В еще одном дополнительном конкретном варианте осуществления, концевой эффектор содержит, по меньшей мере, что-то одно из хирургического диссектора, абляционного наконечника, окклюзирующего зажима, аппликатора окклюзирующего зажима, хирургических щипцов, хирургических браншей, линейного режущего устройства, зажима для абляции и абляционного направляющего электрода.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - вид в перспективе сбоку примерного лапароскопического устройства в соответствии с настоящим изобретением.
Фиг. 2 - вид с пространственным разделением компонентов проксимального конца примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 3 - вид в перспективе сбоку проксимального конца примерного лапароскопического устройства, показанного на фиг. 2, без левого корпуса.
Фиг. 4 - вид в перспективе сбоку проксимального конца примерного лапароскопического устройства, показанного на фиг. 2, без правого корпуса.
Фиг. 5 - вид в перспективе сбоку правого и левого корпусов, состыкованных между собой.
Фиг. 6 - вид в перспективе снизу правого и левого корпусов, состыкованных между собой.
Фиг. 7 - вид в перспективе сбоку примерного барабана примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 8 - вид в профиль примерного барабана, показанного на фиг. 7.
Фиг. 9 - вид в перспективе снизу примерного барабана, показанного на фиг. 7,
Фиг. 10 - вид снизу примерного барабана, показанного на фиг. 7.
Фиг. 11 - вид в перспективе сбоку справа примерной соединительной пластины примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 12 - вид в перспективе сбоку слева примерной соединительной пластины, показанной на фиг. 11.
Фиг. 13 - вид в перспективе сбоку спереди примерной соединительной пластины, показанной на фиг. 11.
Фиг. 14 - увеличенный вид в профиль со снятым правым корпусом, с изображением взаимодействия между барабаном и соединительной пластиной в первом положении.
Фиг. 15 - увеличенный вид в профиль со снятым правым корпусом, с изображением взаимодействия между барабаном и соединительной пластиной во втором положении.
Фиг. 16 - увеличенный вид в профиль барабана и соединительной пластины, со снятым правым корпусом, с изображением взаимодействия между барабаном и соединительной пластиной в третьем положении.
Фиг. 17A - вид в профиль, представляющий три вертикальных положения концевого эффектора, получаемые с использованием активного механизма изменения положения.
Фиг. 17B - вид сверху, представляющий три горизонтальных положения концевого эффектора (показанных с использованием изменений положения полужесткой трубки относительно концевого эффектора), получаемые с использованием пассивного механизма изменения положения.
Фиг. 18 - увеличенный вид в профиль со снятым правым корпусом, с изображением угла Θ между захватом и канавкой.
Фиг. 19 - вид в перспективе сбоку наружной стороны правого корпуса примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 20 - вид в перспективе сбоку внутренней стороны правого корпуса примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 21 - вид в перспективе сбоку наружной стороны примерного рычага примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 22 - вид в профиль примерного рычага, показанного на фиг. 21.
Фиг. 23 - вид в перспективе сбоку внутренней стороны примерного рычага, показанного на фиг. 21.
Фиг. 24 - вид в перспективе сбоку наружной стороны левого корпуса примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 25 - вид в перспективе сбоку внутренней стороны правого корпуса примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 26 - увеличенный вид в профиль внутренней области проксимального участка примерного устройства управления лапароскопического устройства, показанного на фиг. 1, со снятым левым корпусом.
Фиг. 27 - увеличенный вид в профиль внутренней области проксимального участка примерного устройства управления, показанного на фиг. 1, со снятым правым корпусом.
Фиг. 28 - вид в перспективе сбоку примерного механизма рукоятки лапароскопического устройства, показанного на фиг. 1.
Фиг. 29 - вид в перспективе снизу примерного механизма рукоятки, показанного на фиг. 28.
Фиг. 30 - вид в перспективе сбоку внутренней области примерного устройства управления и проксимального участка трубки примерного лапароскопического устройства, показанного на фиг. 1, со снятым левым корпусом.
Фиг. 31 - вид в перспективе сбоку внутренней области примерного устройства управления и проксимального участка трубки примерного лапароскопического устройства, показанного на фиг. 1, со снятым правым корпусом и установленной примерной головкой.
Фиг. 32 - вид в перспективе сбоку внутренней области примерного устройства управления и проксимального участка трубки примерного лапароскопического устройства, показанного на фиг. 1, со снятым правым корпусом и снятой примерной головкой.
Фиг. 33 - продольное сечение альтернативной примерной трубки для применения с лапароскопическим устройством, показанным на фиг. 1.
Фиг. 34 - вид с пространственным разделением компонентов дистального конца примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 35 - вид в перспективе сбоку примерной вилки примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 36 - вид в перспективе сбоку примерной вилки, показанной на фиг. 35, без верхнего корпуса.
Фиг. 37 - вид сверху примерной вилки, показанной на фиг. 36.
Фиг. 38 - вид в перспективе сбоку нижнего корпуса примерной вилки, показанной на фиг. 35.
Фиг. 39 - вид в перспективе сбоку примерного зубчатого ловителя примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 40 - вид в профиль спереди примерного зубчатого ловителя, показанного на фиг. 39.
Фиг. 41 - вид в профиль сзади примерного зубчатого ловителя, показанного на фиг. 39.
Фиг. 42 - вид в перспективе сбоку примерной вилки, показанной на фиг. 35, без верхнего корпуса и с парой зубчатых пластин и полушарниров.
Фиг. 43 - вид в перспективе сбоку примерной вилки, показанной на фиг. 35, без верхнего корпуса и с единственной зубчатой пластиной и единственным полушарниром.
Фиг. 44 - вид в перспективе сбоку примерной зубчатой пластины примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 45 - вид в профиль снаружи примерного полушарнира примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 46 - вид в профиль спереди полушарниров, показанных на фиг. 42, в сборе.
Фиг. 47 - вид сверху полушарниров, показанных на фиг. 46
Фиг. 48 - вид в перспективе сбоку изнутри примерного полушарнира примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 49 - вид в перспективе сбоку примерного переустанавливаемого узла браншей примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 50 - вид в перспективе сбоку примерных скобы и натяжной серьги примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 51 - вид в перспективе сбоку с проксимального конца примерной скобы, показанной на фиг. 50.
Фиг. 52 - горизонтальный разрез примерных скобы и натяжной серьги, показанных на фиг. 50.
Фиг. 53 - горизонтальный разрез примерной скобы, показанной на фиг. 50.
Фиг. 54 - вид в перспективе сбоку натяжной серьги, показанной на фиг. 50.
Фиг. 55 - горизонтальный разрез примерных скобы и натяжной серьги, соединенных с примерными соединительными пластинами и соединительными зажимами.
Фиг. 56 - в перспективе сбоку примерной натяжной серьги, соединенной с примерными соединительными пластинами и соединительными зажимами.
Фиг. 57 - в перспективе сбоку примерных соединительных пластин, соединенных с примерными соединительными зажимами, показанными на фиг. 56.
Фиг. 58 - вид в перспективе снаружи примерной левой бранши примерного лапароскопического устройства, показанного на фиг. 1.
Фиг. 59 - вид в перспективе изнутри примерной левой бранши, показанной на фиг. 58.
Фиг. 60 - вид сверху, представляющий положение браншей и различных других дистальных концевых компонентов примерного лапароскопического устройства, показанного на фиг. 1, в наиболее компактной ориентации по ширине.
Фиг. 61 - увеличенный вид сверху браншей и соединительных зажимов, показанных на фиг. 60.
Фиг. 62 - вид сверху, представляющий положение браншей и различных других дистальных концевых компонентов примерного лапароскопического устройства, показанного на фиг. 1, когда натяжная серьга первоначально сдвинута в проксимальном направлении.
Фиг. 63 - увеличенный вид сверху браншей и соединительных зажимов, показанных на фиг. 62.
Фиг. 64 - вид сверху, представляющий положение браншей и различных других дистальных концевых компонентов примерного лапароскопического устройства, показанного на фиг. 1, когда натяжная серьга сдвинута в проксимальном направлении дальше, чем на фиг. 62.
Фиг. 65 - увеличенный вид сверху браншей и соединительных зажимов, показанных на фиг. 64.
Фиг. 66 - вид сверху, представляющий положение браншей и различных других дистальных концевых компонентов примерного лапароскопического устройства, показанного на фиг. 1, когда натяжная серьга сдвинута в ее крайнее проксимальное положение для полного раскрытия браншей.
Фиг. 67 - вид сверху, представляющий положение браншей и различных других дистальных концевых компонентов, если примерное лапароскопическое устройство, показанное на фиг. 1, не содержит шарнира между браншами и соединительными зажимами.
Фиг. 68 - вид в перспективе примерного фиксатора в разомкнутом положении, который можно применять с примерным лапароскопическим устройством, показанным на фиг. 1.
Фиг. 69 - вид в перспективе примерного фиксатора, показанного на фиг. 68, в сомкнутом положении.
Фиг. 70 - вид в разрезе примерного фиксатора, показанного на фиг. 68, в его разомкнутой конфигурации, с изображением проволочного элемента, жестких трубчатых элементов и поджимных элементов.
Фиг. 71 - вид в разрезе примерного фиксатора, показанного на фиг. 69, в его сомкнутой конфигурации, с изображением проволочного элемента, жестких трубчатых элементов и поджимных элементов.
Фиг. 72 - вид в перспективе примерных фиксаторов, показанных на фиг. 68-71, с представлением возможности непараллельного смыкания.
Фиг. 73 - вид в перспективе первой стадии сборки альтернативного варианта осуществления фиксатора, с изображением проволочного элемента, окруженного жесткими трубчатыми элементами.
Фиг. 74 - вид в перспективе второй стадии сборки фиксатора, показанного на фиг. 73, где добавлены валики поверх жестких трубчатых элементов.
Фиг. 75 - вид в перспективе фиксатора, показанного на фиг. 73 и 74, после того, как вся поверхность фиксатора покрыта наружной тканевой оболочкой.
Фиг. 76 - вид в перспективе сбоку альтернативного примерного устройства управления, который можно использовать с лапароскопическим устройством, показанным на фиг. 1.
Фиг. 77 - вид в перспективе сбоку альтернативного примерного устройства управления, показанного на фиг. 76, изображенного без левого корпуса.
Фиг. 78 - увеличенный вид в перспективе дистального участка альтернативного примерного устройства управления, показанного на фиг. 76.
Фиг. 79 - вид в профиль конструкции, показанной на фиг. 78, с кнопкой, изображенной в ее максимально высоком вертикальном положении.
Фиг. 80 - вид в профиль конструкции, показанной на фиг. 78, с кнопкой, изображенной в ее максимально нажатом вниз вертикальном положении.
Фиг. 81 - увеличенный вид в перспективе внутренней области дистального участка альтернативного примерного устройства управления, показанного на фиг. 76, изображенного без кнопки и первого зубчатого узла.
Фиг. 82 - увеличенный вид в перспективе внутренней области дистального участка альтернативного примерного устройства управления, показанного на фиг. 76, изображенного без кнопки.
ПОДРОБНОЕ ОПИСАНИЕ
Ниже приведены описание и пояснения чертежей примерных вариантов осуществления настоящего изобретения, включающих в себя хирургическое оборудование и, в частности, хирургическое оборудование, которое можно применять в процессе минимально инвазивных процедур. Изобретение относится также к хирургическому оборудованию для облегчения установки и развертывания окклюзирующего устройства для ушка предсердия. Кроме того, изобретение относится к хирургическому оборудованию, которое выполнено с возможностью размещения гибких эндоскопов или работы совместно с ними. Разумеется, специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что нижеописанные варианты осуществления являются примерными по своему характеру и могут быть реконфигурированы без выхода за пределы объема и сущности настоящего изобретения. Однако, для ясности и точности, нижеописанные примерные варианты осуществления могут включать в себя дополнительные этапы, способы и признаки, которые, как следует понимать специалисту со средним уровнем компетентности, не обязательно должны быть в пределах объема настоящего изобретения.
Как показано на фиг. 1-6, примерное лапароскопическое устройство 100 содержит устройство 110 управления, смонтированное на проксимальном участке полужесткой трубки 112, которая является относительно линейной. Устройство 110 управления содержит различные элементы управления для манипуляции переустанавливаемым механизмом 116, имеющим рабочее соединение с концевым эффектором 118, при этом, переустанавливаемый механизм установлен на дистальном участке трубки 112. В приведенном примерном варианте осуществления, переустанавливаемый механизм 116 соединен с концевым эффектором, содержащим устройство 118 установки зажимов. Однако, как поясняется в отношении дальнейших вариантов осуществления, концевой эффектор 118 может содержать любое число устройств, например, но без ограничения, щипцы, абляционные направляющие электроды, бранши, линейные режущие устройства, абляционные наконечники, зажимы для абляции, диссекторы с подсветкой и диссекторы без подсветки.
Примерный переустанавливаемый механизм 116 содержит активный механизм и пассивный механизм. Следует отметить, что активный механизм выполняет функцию управления углом поворота концевого эффектора 118 вокруг поперечной оси (т.е. вверх и вниз), а пассивный механизм выполняет функцию управления углом поворота концевого эффектора вокруг вертикальной оси (т.е. из стороны в сторону). Однако, как будет очевидно из последующего раскрытия, переустанавливаемый механизм 116 в альтернативном примерном варианте осуществления может содержать только активные или пассивные механизмы. И наоборот, механизм 116 изменения положения в дополнительных альтернативных примерных вариантах осуществления может использовать пассивный механизм для управления углом поворота концевого эффектора 118 вокруг поперечной оси (т.е. вверх и вниз), а активный механизм выполняет функцию управления углом поворота концевого эффектора вокруг вертикальной оси (т.е. из стороны в сторону). Специалисты в данной области техники поймут, что нижеприведенное описание относится всего к одной из множества конфигураций, включающих в себя активные и пассивные механизмы для управления движением концевого эффектора 118 в двух плоскостях.
Устройство 110 управления содержит правый корпус 130 и левый корпус 132, которые совместно ограничивают внутреннюю полость и соответствующие отверстия для обеспечения сквозного размещения некоторых элементов управления. Первое из упомянутых отверстий является верхним отверстием 134, которое обеспечивает сквозное размещение пары барабанов 136, 138, положение которых можно изменять вращением вокруг поперечной оси.
Как показано на фиг. 7-10, каждый барабан 136, 138 содержит поверхность 140 контакта, выполненную с возможностью приложения контактного воздействия пользователя для вращения барабана. Контактная поверхность 140 содержит ряд распределенных по окружности углублений 142, между которыми размещается ряд выступов 144 для улучшения сцепления между пользователем и барабаном 136, 138. Каждый выступ 144 скошен для согласования с контуром барабана 136, 138, который понижается от максимума в месте, где контактная поверхность 140 примыкает к внутренней поверхности 146. От углублений 142 и выступов 144 продолжается по радиусу плоская кольцевая поверхность 148, которая образует по окружности внешнюю границу кольцеобразной внешней полости 152. Пара наклонных поверхностей 154, 156, продолжающихся от кольцевой поверхности 148 и расположенных с аксиальным промежутком между собой, выполняют функцию сужения диаметра полости 152, при аксиальном перемещении в глубину полости. Полость 152 также частично ограничена пустотелой осью 158, которая продолжается от центра каждого барабана 136, 138. Данная ось 158 кольцеобразно окружена около ее основания кольцевым плато 162, при этом, ось и плато совместно ступенчато увеличивают радиальный размер кольцеобразной полости 152. Внутренняя область оси 158 образует цилиндрическую полость 166, которая сохраняет данную цилиндрическую форму, пока не достигает средней точки внутренней области, где полость принимает полукруглую форму, которая продолжается насквозь до внутренней поверхности 146. Полукруглый выступ 170, примыкающий к полости 166, продолжается, в общем, перпендикулярно от внутренней поверхности 146. Внутренняя поверхность 146 содержит также спиральную канавку 172, которая продолжается, приблизительно, на двести двадцать градусов вокруг выступа 170. Таким образом, радиальное расстояние между канавкой 172 и выступом 170 постепенно изменяется и достигается максимума и минимума на концах канавки.
Как показано на фиг. 11-13, барабаны 136, 138 имеют рабочее соединение с переустанавливаемым механизмом 116 и выполняют функцию управления углом поворота переустанавливаемого механизма вокруг поперечной оси. Для управления углом поворота переустанавливаемого механизма 116 вокруг поперечной оси, каждый барабан 136, 138 соединен с соединительной пластиной 180, которая преобразует вращательное движение барабана в продольное движение вдоль продольной оси, продолжающейся по длине трубки 112. В частности, каждая соединительная пластина 180 содержит форму ключа, содержащую плоскую секцию 182 и множество высеченных отверстий 184, 186, 188. Первое из упомянутых высеченных отверстий 184 имеет подковообразную форму, которая образует выступ, продолжающийся в отверстие. Затем данный выступ деформируют отгибанием выступа, приблизительно, на девяносто градусов, чтобы создать захват 190, который продолжается перпендикулярно от плоской секции 182. Второе отверстие 186 имеет, в общем, овальную форму с круглыми концами и служит для уменьшения массы соединительной пластины 180 и обеспечения отверстия, стыкующегося с полукруглым выступом 170 соответствующего барабана 136, 138 (смотри фиг. 8-10). Третье отверстие 188 имеет размер по ширине, который существенно меньше его вертикального размера и обеспечивает удлиненное, в общем, прямоугольное отверстие с закругленными углами. Данное третье отверстие 188 обеспечивает пропускание соединительной проволоки 194 и совместно с полупетлей 196 служит для закрепления соединительной проволоки к соединительной пластине 180. В частности, конец плоской секции 182 деформирован для образования полупетли 196, через которую соединительная проволока 194 заправлена с внутренней стороны полупетли (т.е. вогнутой стороны полупетли) и продолжается через третье отверстие 188. В приведенном примерном варианте осуществления, соединительная проволока 194 содержит цилиндрическую гильзу 198, которая закреплена на проволоке таким образом, чтобы не происходило поперечного перемещения гильзы относительно проволоки. Гильза 198 имеет размеры, допускающие пропускание гильзы и соединительной проволоки 194 через третье отверстие 188. В частности, после пропускания гильзы 198 и соединительной проволоки 194 через третье отверстие 188, гильза 198 размещается продольно на соединительной пластине 180 и упирается в полупетлю 196. В частности, гильза 198 имеет такой размер, чтобы гильза не могла проходить через полупетлю 196, при расположении продольно на соединительной пластине 180. Таким образом, изменение положения соединительной проволоки 194 можно обеспечить изменением положения соединительной пластины 180 для натяжения соединительной проволоки 194. Каждая соединительная пластина 180 содержит также распорную полку 200, которая продолжается над вторым отверстием 186. Распорная полка 200 содержит продольный S-образный изгиб, который выполнен по верху формы ключа. Данная полка 200 совместно с противоположной полкой 200 другой соединительной пластины 180 обеспечивает надлежащее расстояние между соседними соединительными пластинами.
Как показано на фиг. 2, 3 и 7-17, узел барабанов 136, 138 и соединительных пластин 180 в сборе обеспечивает средство для изменения положения переустанавливаемого механизма 116 вверх или вниз путем простого вращения барабанов в направлении по часовой стрелке или против часовой стрелки. В частности, соединительные пластины 180 расположены в сборе спинка к спинке, при этом, одна из соединительных пластин 180 перевернута так, что полки 200 обращены внутрь одна к другой. Таким образом, полка 200 первой соединительной пластины 180 упирается в плоскую поверхность 182, а полка 200 второй соединительной пластины упирается в плоскую поверхность 182 первой соединительной пластины. В упомянутой ориентации, захваты 190 каждой соединительной пластины 180 продолжаются вверх, один от другого. В частности, захваты 190 (и участок самих соединительных пластин 180) расположены между внутренними поверхностями 146 барабанов 136, 138 и вложены в соответствующую спиральную канавку 172 соседнего барабана 136, 138. При этом, когда внутренние поверхности 146 сближают, полукруглые выступы 170 барабанов 136, 138 совмещаются так, что плоские поверхности выступов соприкасаются встык между собой, с формированием, тем самым, цилиндрического выступа, который продолжается через оба вторых отверстия 186 соединительных пластин 180.
Как показано, в частности, на фиг. 14-17A, совместное вращение барабанов 136, 138 выполняет функцию изменения вертикальной ориентации переустанавливаемого механизма 116. Например, из положения A, показанного на фиг. 17A, вращение барабанов 136, 138 сверху в дистальном направлении и вниз производит вытягивание первой соединительной пластины 180 в проксимальном направлении и, одновременно, выталкивание второй соединительной пластины в дистальном направлении. Другими словами, вращательное движение барабанов 136, 138, благодаря сопряжению между спиральной канавкой 172 и захватами 190, преобразуется в горизонтальное движение соединительных пластин 180. В частности, захват 190 первой соединительной пластины 180 упирается в конец спиральной канавки 172 первого барабана 136, который выполняет функцию ограничения вертикального хода переустанавливаемого механизма 116. В приведенном примерном варианте осуществления, вертикальный ход ограничен так, что максимальный угол отклонения составляет минус шестьдесят градусов от горизонтали. Чтобы переместить переустанавливаемый механизм 116 вверх, барабаны 136, 138 вращают по часовой стрелке для изменения, тем самым, положения спиральной канавки 172 относительно захвата 190. В примерном варианте, захват 190 двигается внутри спиральной канавки 172 и удерживается в постоянной горизонтальной ориентации относительно канавки благодаря натяжению соединительной проволоки 194, натягивающей соединительную пластину 180 в проксимальном направлении. Однако, когда барабаны 136, 138 вращают по часовой стрелке из положения A, расстояние от центра барабанов до спиральной канавки 172 в месте расположения захвата 190 уменьшается, и, в результате, первая соединительная пластина 180 изменяет свое положение путем смещения в проксимальном направлении относительно барабанов. Непрерывное вращение барабанов 136, 138 по часовой стрелке (приблизительно, на ½ оборота) производит подъем переустанавливаемого механизма 116 вверх в положение B (смотри фиг. 17A), в котором переустанавливаемый механизм находится под углом нуль градусов к горизонтали. Дальнейшее вращение барабанов 136, 138 по часовой стрелке (приблизительно, на ½ оборота) производит подъем переустанавливаемого механизма 116 вверх в положение C (смотри фиг. 17A), в котором переустанавливаемый механизм находится под углом шестьдесят градусов к горизонтали. И, наоборот, вращение барабанов 136, 138 сверху в проксимальном направлении и вниз производит выталкивание первой соединительной пластины 180 в дистальном направлении и, одновременно, вытягивание второй соединительной пластины в проксимальном направлении, что приводит к опусканию переустанавливаемого механизма 116 посредством соединительных проволок 194.
Вращение барабанов 136, 138 пропорционально поворотному движению переустанавливаемого механизма 116. Следует отметить, что положение C соответствует примыканию захвата 190 к противоположному концу спиральной канавки 172, который выполняет функцию установки предела вертикального хода шестьдесят градусов от горизонтали. Другими словами, при вращении барабанов 136, 138 на, приблизительно, 360 градусов, переустанавливаемый механизм способен переместиться на 120 градусов. Соответственно, барабаны 136, 138 производят преобразование трех градусов вращательного движения в один градус поворотного движения. Форму спиральной канавки 172 можно видоизменить, чтобы увеличить или уменьшить коэффициент преобразования вращательного движения барабанов 136, 138 в поворотное движение переустанавливаемого механизма 116. Например, шаг спиральной канавки 172 можно установить таким, чтобы для движения от одной конечной точки до противоположной конечной точки канавки требовалось два полных вращения барабанов 136, 138. В приведенном примере, преобразование будет превращать шесть градусов вращательного движения в один градус поворотного движения (в предположении, что максимальный диапазон поворота составлял 120 градусов). Другими словами, для перемещения переустанавливаемого механизма 116 между конечными точками поворота потребуется два полных вращения барабанов 136, 138. Напротив, шаг спирали можно установить для продолжения в секторе, составляющем одну треть барабана 136, 138, так что будет осуществляться преобразование один к одному (т.е. один градусов вращательного движения превращается в один градус поворотного движения).
Спиральную канавку 172 можно также подобрать для обеспечения переменных отношений по мере того, как поворачиваются барабаны 136, 138. Другими словами, изменения расстояния от центра барабанов 136, 138 к канавке 172 является непостоянным вдоль всех 360 градусов. Например, средняя секция канавки 172 может иметь шаг, который соответствует преобразованию двух градусов вращения в один градус поворотного движения переустанавливаемого механизма 116 в пределах ± 20 градусов от горизонтали (т.е. от нуля градусов). Но, при выходе за пределы приведенного положения, шаг канавки 172 увеличивается так, что последние 40 градусов хода (от 20 до 60 градусов и от -60 до -20 градусов) получают вращением барабанов на три градуса для обеспечения одного градуса поворотного движения. Специалистам в данной области техники будет понятно, что получение различных комбинаций возможно путем изменения шага канавки 172 и обеспечения, по меньшей мере, одной секции канавки с отличающимися шагами.
Как видно из фиг. 18, от шага (т.е. угла Θ) спиральной канавки 172 зависит также, будет ли переустанавливаемый механизм 116 самофиксирующимся. В контексте настоящего раскрытия, самофиксация означает автоматическую задержку перемещения. В примерном варианте, по мере того, как увеличивается угол Θ спиральной канавки 172 (и увеличивается коэффициент преобразование углов вращения в углы поворота), сопротивление перемещению захвата 190 внутри канавки 172 уменьшается. В примерном варианте, когда угол Θ между захватом и канавкой составляет девяносто градусов, сопротивление становится максимальным. Напротив, когда угол Θ между захватом и канавкой равен нулю, то сопротивление становится минимальным. При некотором угле Θ между нулем и девяносто градусов, сопротивление является достаточно большим, чтобы обеспечивать возможность самофиксации. Другими словами, чтобы обеспечить возможность самофиксации, сопротивление перемещению захвата 190 внутри канавки 172 должно быть больше, чем сила T натяжения соединительной проволоки 194. Чем больше число оборотов спирали, которая составляет канавку 172, тем больше угол Θ. Чем меньше число оборотов спирали, которая составляет канавку 172, тем меньше угол Θ и больше вероятность вращения барабанов 136, 138 под действием обратной нагрузки. В примерном варианте, спиральная канавка 172 имеет угол, приблизительно, 80-85 градусов. Данный угол достаточен для обеспечения возможности самофиксации, чтобы обратная нагрузка (усилие, которое приложено непосредственно к переустанавливаемому механизму 116 и передается по соединительной проволоке 194) не могла вызвать вращения барабанов 136, 138, и, тем самым, сдерживалось поворотное движение переустанавливаемого механизма. Однако, возможность самофиксации может быть нежелательной, и тогда форму захвата 190 и канавки 172 можно изменить для уменьшения трения между ними, в том, числе, можно уменьшить число оборотов спирали для уменьшения угла Θ.
Как изложено выше, барабаны 136, 138 поворачиваются и работают как кулачки для изменения положения соединительных пластин 180, которые, в свою очередь, изменяют положение соединительных проволок 194. Как подробно поясняется в дальнейшем, соединительные проволоки 194 закреплены к скобе 614, которая поворачивается относительно полушарниров 594, 596, чтобы обеспечивать неограниченное число положений в диапазоне движения, допускаемого спиральной канавкой 172 барабанов 136, 138. С целью настоящего раскрытия, упомянутый механизм называется активным механизмом изменения положения, поскольку именно принудительное вращение барабанов непосредственно приводит к пропорциональному перемещению скобы 614 относительно полушарниров 594, 596. Кроме того, пользователь, работающий с барабанами 136, 138, может фиксировать положение концевого эффектора 118 путем простого прекращения вращения барабанов. В примерном варианте, сопротивление вращению барабанов 136, 138 обусловлено углом между границами канавки 172 и захватом 190 соединительных пластин 180. Благодаря конструкции данного механизма, пользователь, работающий с барабанами 136, 138, активно управляет положением концевого эффектора 118.
В альтернативном примерном варианте осуществления, активным механизмом можно управлять дистанционно таким образом, что пользователь не имеет физического контакта с барабанами 136, 138, а, вместо этого, управляет устройством 110 управления, удаленным от барабанов. Устройство управления связано с возможностью передачи данных с электродвигателем или приводным механизмом, выполняющим функцию приведения в движение барабанов в требуемом направлении, что обеспечивает возможность дистанционного управления барабанами.
В дополнительном альтернативном варианте осуществления, активный механизм снят с устройства 110 управления и переустановлен дистально на дистальном конце трубки 112, вблизи концевого эффектора 118. В приведенном варианте осуществления, активный механизм открыт и доступен для манипулирования робототехническим концевым элементом и, тем самым, для локального (относительно устройства 110 управления) изменения положения концевого эффектора. В частности, барабаны будут приводиться во вращение робототехническим концевым элементом для изменения положения концевого эффектора 118.
Как подробно поясняется в дальнейшем, данный активный механизм отличается от пассивного механизма с функциями «включено» и «выключено», который допускает некоторое перемещение концевого эффектора 118 или не допускает упомянутого перемещения. Поскольку механизм не обеспечивает принудительного управления инкрементным движением концевого эффектора 118, а выполняет функцию только допуска или сдерживания движения, то механизм называется пассивным в настоящем описании.
Как показано на фиг. 1, 5 и 19-23, правый корпус 130 устройства 110 управления содержит также внешнее углубление 230 и пару сквозных отверстий 232, 234 для размещения переустанавливаемого рычага 236, который входит в состав пассивного механизма. Как подробно поясняется в дальнейшем, переустанавливаемым рычагом 236 можно манипулировать для фиксации и деблокирования переустанавливаемого механизма 116, чтобы обеспечивать или налагать ограничение на возможность поперечной регулировки концевого эффектора 118. Первое сквозное отверстие 232 ограничено цилиндрической опорой 238, которая продолжается перпендикулярно от корпуса 130. Опора 238 включает в себя внешнюю кольцевую опорную поверхность 240 и внутреннюю кольцевую опорную поверхность 242, между которыми установлен рычаг 236. Таким образом, рычаг 236 поворачивается вокруг внешней опорной поверхности 240 и поворачивается внутри внутренней опорной поверхности 242. Рычаг 236 включает в себя сужающийся концевой элемент 248, сформированный неразъемно с чашеобразной закрывающей частью 250. Внутренняя область чашеобразной закрывающей части 250 выполнена полой для создания внутренней полости 252, ограниченной периферической стенкой 254, имеющей, в общем, кольцевую форму на одном конце и изогнутую (но не закругленную) форму на другом конце. Цилиндрический вертикальный выступ 256 продолжается перпендикулярно из внутренней области чашеобразной закрывающей части 250 и, в общем, равноудален от кольцевого участка периферической стенки 254, но продолжается выше высоты периферической стенки. Второй цилиндрический вертикальный выступ 258 сформирован на углу изогнутого конца периферической стенки 254. Данный второй цилиндрический выступ 258 продолжается перпендикулярно от внутренней области чашеобразной закрывающей части 250 (и параллельно первому цилиндрическому выступу 256) и продолжается выше высоты первого цилиндрического выступа 256. Первый цилиндрический выступ 256 вмещается в первое сквозное отверстие 232 цилиндрической опоры 238, а второй цилиндрический выступ 258 вмещается во второе сквозное отверстие 234. Круглое сечение первого цилиндрического выступа 256 и первого сквозного отверстия 232, и размеры каждого допускают поворот первого цилиндрического выступа внутри первого сквозного отверстия без значительного радиального зазора, который, иначе, приводит к нестабильности поворота рычага 236 вокруг единственной оси поворота. Напротив, второе сквозное отверстие 234 является удлиненным и принимает форму изогнутой траектории, которая направляет перемещение второго цилиндрического выступа 258. В частности, второе сквозное отверстие 234 содержит закругленные концы, которые, в общем, согласуются с кривизной и размерами второго выступа 258, но допускает зазор между границами отверстия и выступами, и поэтому выступ может двигаться внутри отверстия. При этом, высота второго сквозного отверстия 234 немного больше, чем диаметр второго выступа 258, а изогнутая траектория сквозного отверстия направляет положение второго выступа по мере того, как рычаг 236 поворачивается относительно корпуса 130. Границы или конечные точки отверстия 234 обеспечивают предел поворотного изменения положения рычага 236. Как подробно поясняется в дальнейшем, границы обеспечивают фиксированное и деблокированное положения, которые соответствуют фиксации или возможности свободной поперечной регулировки концевого эффектора 118. В частности, рычаг 236 соединен с соединительной проволокой 261 посредством намотки соединительной проволоки вокруг первого цилиндрического выступа 256. Остальная внешняя поверхность 260 правого корпуса 130 является выпуклой и содержит несколько дополнительных элементов.
Как показано на фиг. 2, 19 и 20, дополнительные элементы содержат расширенную секцию 264 вблизи дистального конца 262, которая является закругленной с нижней стороны. Данная расширенная секция 264 сужается в проксимальном и дистальном направлениях и переходит в проксимальное сужение 266 и дистальный заплечик 268. Дистальный заплечик 268 расположен между расширенной секцией 264 и полукруглым переходником 270. Как подробно поясняется в дальнейшем, переходник 270 содержит пару фиксаторов 272, которые входят в сцепление с полужесткой трубкой 112 для блокирования продольного перемещения трубки относительно устройства 110 управления. Оба фиксатора 272 продолжаются параллельно между собой и продолжаются от внутренней окружной поверхности 278 переходника 270, которая взаимодействует с внешней поверхностью полужесткой трубки 112. Внешняя поверхность переходника 270 является гладкой и полукруглой для размещения цилиндрической головки 282, которая охватывает внешнюю поверхность переходника 270.
Как показано на фиг. 5 и 6, внешняя поверхность 260 правого корпуса 130 содержит также наклонную верхнюю поверхность 284 (наклоненную вниз с дистальной стороны в проксимальную сторону), которая переходит с изгибом в фигурное углубление 286 и выгнутую, так называемую, медиальную поверхность 288, при этом, обе упомянутые поверхности переходят в относительно плоскую нижнюю поверхность 290. Как подробно поясняется в дальнейшем, нижняя поверхность 290 правого корпуса 130 совместно с соответствующей нижней поверхностью 294 левого корпуса 132 частично ограничивает отверстие 296 механизма рукоятки и отверстие 298 закрепления рукоятки. Оба отверстия 296, 298 проходят насквозь во внутренние области соответствующих корпусов 130, 132. Поверхности 284, 288, 290 сближаются на проксимальном конце для частичного ограничения проксимального отверстия 300, которое также проходит во внутреннюю область корпуса 130.
Как показано на фиг. 20, внутренняя область правого корпуса содержит несколько полых цилиндров 304, которые продолжаются, в общем, перпендикулярно от внутренней поверхности и, в общем, параллельны между собой. Каждый цилиндр 304 выполнен в размер с возможностью вмещения резьбовой крепежной детали для закрепления соответствующих корпусов 130, 132 одного к другому. В примерном варианте, два цилиндра из полых цилиндров 304 разнесены между собой на расстояние, заполненное поперечиной 306 с полукруглым вырезом. Дальше в проксимальном направлении от упомянутых полых цилиндров 304 находится пара ребер 308 жесткости, часть промежутка между которыми занимает выступ 310, имеющий соответствующую форму, которая определяет границы внешнего углубления 230. Около проксимального конца выступа 310 находится другая пара полых цилиндров 304. За данными пустотелыми цилиндрами 304 расположена другая пара ребер 308 жесткости, которая находится в промежутке до третьего набора полых цилиндров 304. Полые цилиндры 304 данной пары, содержащей третий набор, разнесены между собой на расстояние, заполненное поперечиной 312, которая содержит удлиненный выступ 314, продолжающийся в проксимально-дистальном направлении. Как поясняется в дальнейшем, удлиненный выступ 314 является пустотелым и содержит соответствующую полость 316, которая вмещает участок механизма 320 рукоятки (смотри фиг. 26). И, наконец, в промежутке между третьим набором цилиндров и единственным проксимальным цилиндром 304 расположено проксимальное ребро жесткости 308. Участок периметра внутренней поверхности правого корпуса 130 содержит заглубленный выступ 322, который вмещается в соответствующий паз 324 (смотри фиг. 25) левого корпуса 132, для совмещения корпусов 130, 132. Внутренняя область правого корпуса содержит также фиксатор 326, который продолжается в отверстие 298 закрепления рукоятки и служит для удерживания механизма рукоятки в установленном положении.
Как показано на фиг. 5, 6, 24 и 25, левый корпус 132 имеет сходство с правым корпусом 130 и содержит выпуклую внешнюю поверхность 340 и вогнутую внутреннюю поверхность 342. Внутренняя и внешняя поверхности 340, 342 сходятся для частичного ограничения верхнего отверстия 134, отверстия 296 механизма рукоятки, отверстия 298 закрепления рукоятки и проксимального отверстия 300.
Левый корпус 132 устройства 110 управления содержит расширенную секцию 354 вблизи дистального конца 352, которая является закругленной с нижней стороны. Данная расширенная секция 354 сужается в проксимальном и дистальном направлениях и переходит в проксимальное сужение 356 и дистальный заплечик 358. Дистальный заплечик 358 расположен между расширенной секцией 354 и полукруглым переходником 360. Внешняя поверхность переходника 360 является гладкой и полукруглой для размещения цилиндрической головки 282, которая охватывает внешнюю поверхность переходника 360.
Внешняя поверхность 340 левого корпуса 132 содержит также наклонную верхнюю поверхность 364 (наклоненную вниз с дистальной стороны в проксимальную сторону), которая переходит с изгибом в фигурное углубление 366 и выгнутую боковую поверхность 368, которые обе переходят в относительно плоскую нижнюю поверхность 294. Выгнутая боковая поверхность 368 содержит множество сквозных отверстий 370, которые частично ограничены соответствующими пустотелыми цилиндрами 372, которые продолжаются во внутреннюю область левого корпуса 132. Данные цилиндры 372 выполнены с возможностью совмещения с пустотелыми цилиндрами 304 правого корпуса 130 и вмещения соответствующих крепежных деталей (не показанных) для закрепления соответствующих корпусов одного к другому. Кроме того, нижние поверхности 290, 294 корпусов 130, 132 совместно ограничивают отверстие 296 механизма рукоятки и отверстие 298 закрепления рукоятки. Поверхности 364, 368, 294 сближаются на проксимальном конце для частичного ограничения проксимального отверстия 300, которое также проходит во внутреннюю область корпуса 132.
Внутренняя область левого корпуса 132 содержит несколько полых цилиндров 372, которые продолжаются, в общем, перпендикулярно от внутренней поверхности 342 и, в общем, параллельны между собой. В примерном варианте, два цилиндра из полых цилиндров 372, ближайшие к дистальному концу, разнесены между собой на некоторое расстояние и имеют, в общем, одинаковую высоту. В проксимальном направлении от данных полых цилиндров 372 находится пара ребер 378 жесткости, часть промежутка между которыми занимает цилиндрический выступ 380, имеющий пустую внутреннюю полость 382 и продольную высоту, приблизительно равную высоте ребер. Далее в проксимальном направлении от ребер 378 жесткости находится пара полых цилиндров 372, которые разнесены между собой на расстояние, заполненное Г-образной поперечиной 383. Следует отметить, что верхний цилиндр 372 имеет высоту, сравнительно такую же, как высота высокого участка поперечины, а нижний цилиндр имеет высоту, сравнительно такую же, как высота нижнего участка поперечины. Дальше в проксимальном направлении от Г-образной поперечины 383, полый цилиндр 384 большего размера пересекает ребро 379 жесткости, содержащее выполненный в нем вырез, делающий данное ребро похожим на Г-образную поперечину. Дальше в проксимальном направлении от пустотелого цилиндра 384 большего размера находится Г-образная поперечина 385, после которой расположена пара полых цилиндров 372, содержащих третий набор и разнесенных между собой на некоторое расстояние, заполненное поперечиной 386, которая содержит удлиненный выступ 388, продолжающийся в проксимально-дистальном направлении. Как поясняется в дальнейшем, удлиненный выступ 388 является пустотелым и содержит соответствующую полость 390, которая вмещает участок механизма 320 рукоятки. И, наконец, в промежутке между третьим набором цилиндров и единственным проксимальным цилиндром 394 расположено проксимальное ребро жесткости 392. Участок периметра внутренней поверхности 340 левого корпуса 132 содержит пазы 324, которые вмещают заглубленный выступ 322 правого корпуса 130.
Как показано на фиг. 2 и 26-29, механизм 320 рукоятки содержит переустанавливаемую рукоятку 400, приводное звено 402, возвратную пружину 404 и плоскую тягу 406. Как подробно поясняется в дальнейшем, плоская тяга 406 соединена с проволочной тягой 408, имеющей рабочее соединение с устройством 118 установки зажимов, чтобы селективно размыкать и смыкать окклюзирующий зажим 1160 (смотри фиг. 75), например, во время хирургической процедуры установки окклюзирующего зажима ушка предсердия. Более подробное пояснение соответствующих компонентов механизма 320 рукоятки приведено в дальнейшем.
Переустанавливаемая рукоятка 400 содержит изогнутую нижнюю поверхность 414 захвата, содержащую ряд выпуклостей 416, продольно разнесенных между собой, для облегчения захвата пользователем. При этом, нижняя поверхность 414 захвата сужается в медиально-латеральном направлении от максимальной ширины между проксимальным и дистальным концами. Противоположно нижней поверхности 414 захвата находится соответствующая внутренняя поверхность 418, из которой продолжается пара разнесенных между собой, параллельных вертикальных стенок 420, 422. Вертикальные стенки 420, 422 также соединены между собой множеством поперечных стенок 424. Проксимальная поперечная стенка также соединена с вертикально выступающей петлей 428, которая обеспечивает сквозное отверстие 430 в медиально-латеральном направлении. Стенки 420, 422, продолжающиеся в дистальном направлении от петли 428, постепенно наращивают высоту и продолжаются дистально за нижнюю поверхность 414 захвата. В частности, каждый крайний дистальный участок стенок 420, 422 содержит закругленный верхний конец, содержащий круглое отверстие 434, продолжающееся в медиально-латеральном направлении. Дистальная стенка 436 продолжается между стенками 420, 422 на дистальном конце и переходит в нижнюю поверхность 414 захвата. Круглые отверстия 434 стенок 420, 422 совмещены в поперечном направлении, а также совмещены круглые отверстия 440, 442 двух других пар, продолжающиеся сквозь стенки в медиально-латеральном направлении. Оба сдвоенных отверстия 440, 442 меньше в диаметре, чем дистальные отверстия 434, и каждое выполнено с возможностью вмещения штифта 444 для закрепления с возможностью изменения положения приводного звена 402 к рукоятке 400. Хотя штифт 444 будет занимать только одно из сдвоенных отверстий 440, 442, однако, возможно использование другого, незанятого сдвоенного отверстия, в зависимости от упругой постоянной возвратной пружины 404 и устройства (например, устройства 118 установки зажимов), содержащего концевой эффектор 118.
Примерное приводное звено 402 содержит U-образную, продольно продолжающуюся пластину, выполненную в размер для вставки между стенками 420, 422 рукоятки 400. Дистальный конец пластины 402 содержит U-образный изгиб и пару сквозных отверстий (продолжающихся в медиально-латеральном направлении), которые вмещают штифт 444. Проксимальный конец пластины 402 содержит соответствующие лапки, параллельные между собой и содержащие, каждая, сквозное отверстие. Каждая из лапок пластины 402 поджата цилиндрической возвратной пружиной 404, которая находится в контакте с закругленным концом каждой лапки. В приведенном примерном варианте осуществления, возвратная пружина 404 нежестко соединена с приводным звеном 402, а, напротив, поджата к приводному звену и удерживается в рабочем положении напряжением самой возвратной пружины, нажимающей на соответствующие ребра жесткости корпусов 130, 132 и проксимальные концы пластины 402. Сквозные отверстия в лапках вмещают второй штифт 450, который одновременно также вмещен в полость 390 удлиненного выступа 388 и полость 316 удлиненного выступа 314, и который соединяет приводное звено 402 с плоской тягой 406.
Плоская тяга 406 содержит, по существу, прямолинейную и плоскую опорную планку, содержащую три отверстия 460, 462, 464, которые продолжаются в медиально-латеральном направлении. Первое отверстие 460 вмещает второй штифт 450 для крепления приводного звена к плоской тяге 406. Второе отверстие 462 содержит прямоугольное отверстие с закругленными углами, а третье отверстие 464 содержит прямоугольное отверстие меньшего размера с закругленными углами и размером в проксимально-дистальном направлении, который меньше, чем размер сверху вниз. Между отверстиями 462, 464 находится полоска плоской тяги 406, деформированная для образования, так называемой, латеральной полупетли 468, латерально вогнутой и медиально выпуклой. Вторая полоска плоской тяги 406 на дистальном конце также деформирована для образования, так называемой, медиальной полупетли 470, латерально выпуклой и медиально вогнутой. Следует отметить, латеральная полупетля 468 глубже, чем медиальная полупетля 470, так как латеральная полупетля 468 выполнена в размер для вмещения гильзы 474, которая охватывает проксимальный участок проволочной тяги 408. Данная гильза 474 не может легко изменять продольное положение вдоль проволочной тяги 408. Соответственно, изменение положения гильзы 474 в то время, когда проволочная тяга 408 натянута, соответственно приводит к изменению положения проволочной тяги.
Переустанавливаемая рукоятка 400 выполнена с возможностью захвата пользователем и изменения положения из удерживаемого положения в свободное положение. В удерживаемом положении (смотри фиг. 26), петля 428 рукоятки 400 находится в зацеплении с фиксатором 326 правого корпуса 130 для удерживания рукоятки вплотную к корпусам 130, 132. Когда пользователь желает отцепить рукоятку 400 от фиксатора 326, пользователь отодвигает рукоятку в латеральном направлении от фиксатора и из зацепления с фиксатором. Затем поджимное усилие пружины 404 выполняет функцию нажима на приводное звено 402, которое нажимает на рукоятку 400 и, тем самым, отжимает рукоятку от корпусов 130, 132. Одновременно происходит изменение положения плоской тяги 406. Когда рукоятка 400 находится в зацеплении с фиксатором 326, плоская тяга полностью отведена в крайнее проксимальное положение. Как подробно поясняется в дальнейшем, крайнее проксимальное положение плоской тяги 406 имеет следствием подтягивание проволочной тяги 408, которая закреплена также к натяжному звену 764, в проксимальном направлении для размыкания окклюзирующего зажима 1160. И, наоборот, когда рукоятка 400 расцепляется с фиксатором 326 и перемещается от корпусов 130, 132, плоская тяга изменяет положение в дистальном направлении. В конечном счете, если рукоятка 400 максимально отведена от корпусов 130, 132, то плоская тяга 406 устанавливается в крайнее дистальное положение. Как подробно поясняется в дальнейшем, крайнее дистальное положение плоской тяги 406 приводит к изменению положения проволочной тяги 408 в дистальном направлении для смыкания окклюзирующего зажима 1160.
Как показано на фиг. 2-4, устройство 110 управления содержит также съемный хвостовик 490, который посажен в проксимальное отверстие 300 корпусов 130, 132. Съемный хвостовик 490 соединен с, по меньшей мере, одной проволокой 492 высвобождения зажима (в данном случае, двумя проволоками высвобождения зажима), которые выполняют функцию отсоединения окклюзирующего зажима от устройства 118 установки зажимов. Таким образом, хвостовик можно извлечь из проксимального конца устройства 110 управления для вытягивания, тем самым, высвобождающих(щей) проволок(и) в проксимальном направлении и отсоединения окклюзирующего зажима от устройства 118 установки зажимов. В приведенном примерном варианте осуществления, хвостовик 490 закрепляется в проксимальном отверстии 300 на фрикционной посадке, сопротивление которой может преодолеваться давлением, приложенным пользователем к хвостовику, для перемещения хвостовика в проксимальном направлении относительно устройства 110 управления. Однако, в объем настоящего изобретения входит также применение фиксаторов или других механизмов высвобождения принудительного действия для высвобождения хвостовика 490 из устройства 110 управления.
Как показано на фиг. 2-32, сборка устройства 110 управления включает в себя сборку одного из барабанов 136, 138 с другим таким образом, чтобы внутренние поверхности 146 барабанов заключали между собой плоские звенья 180. Подробное описание сборки барабанов 136, 138 и плоских звеньев 180 уже приведено выше и не будет повторяться для краткости. Затем, барабаны 136, 138 ориентируют так, чтобы оси 158 были обращены в противоположных направлениях и соответственно размещались в цилиндрическом выступе 380 левого корпуса 132 и в кольцевой опорной поверхности 242 правого корпуса 130. Аналогичным образом, приводное звено 402 устанавливают на правом и левом корпусах 130, 132 посредством штифта 450, одновременно размещаемого в полостях 31, 390 удлиненных выступов 314, 388. В примерном варианте, приводное звено 402 и правый корпус 130 заключают между собой плоскую тягу 406. В то же время, приводное звено 402 устанавливают на рукоятке 400, при этом, круглое отверстие 434 рукоятки вмещает цилиндр 304 правого корпуса 130 для шарнирно-поворотной установке рукоятки на корпусе. Кроме того, пружину 404 вставляют в правый корпус 130 таким образом, чтобы пружина располагалась между проксимальным ребром 308 жесткости и приводным звеном 402. И, наконец, вставляют съемный хвостовик 490 между корпусами 130, 132, и затем корпуса 130, 132 скрепляют для заделки устройства управления. На данном этапе, проволочная тяга 408, проволоки 492 высвобождения зажима, соединительные проволоки 194 и соединительная проволока 261 продолжаются через дистальный конец 262 корпусов 130, 132.
Как показано на фиг. 20 и 30-32, устройство 110 управления закрепляют к полужесткой трубке 112, которая является сравнительно линейной и имеет относительно постоянное круглое поперечное сечение. В приведенном примерном варианте осуществления, трубка 112 изготовлена из нержавеющей стали и содержит проксимальное круглое отверстие и дистальное круглое отверстие. Проксимальное круглое отверстие обеспечивает проход между внутренней областью трубки 112 и внутренней областью устройства 110 управления. В частности, пустая внутренняя область трубки 112 вмещает на проход проволочную тягу 408, проволоки 492 высвобождения зажима, соединительные проволоки 194 и соединительную проволоку 261. Трубка 112 содержит проксимальную секцию, содержащую пару прямоугольных изогнутых вырезов 500. Упомянутые вырезы 500 обеспечивают соответствующие отверстия под фиксаторы 272 переходника 270 для размещения и закрепления трубки 112 на корпусах 130, 132.
Кроме того, как показано на фиг. 33, полужесткая трубка 112 может быть относительно линейной, но содержит два дополнительных отверстия 504, 506, которые вмещают отдельную трубку 508, выполненную с возможностью обеспечения отдельного пути для диагностического инструмента 510. Примерные диагностические инструменты для применения совместно с настоящей полужесткой трубкой включают в себя, но без ограничения, щипцы, абляционные направляющие электроды, бранши, линейные режущие устройства, абляционные наконечники, зажимы для абляции, диссекторы с подсветкой и диссекторы без подсветки. Примерный диагностический инструмент 510 можно применять в сочетании с концевым эффектором, которым манипулируют посредством переустанавливаемого механизма 116.
Как показано на фиг. 34-38, дистальный участок примерного переустанавливаемого механизма 116 содержит вилку 514, содержащую нижний и верхний корпуса 516, 518 вилки. Каждый корпус 516, 518 является зеркальным отображением другого корпуса и содержит выпуклую полуцилиндрическую проксимальную секцию 522, имеющую полукруглый проксимальный конец 524, частично закрытый, если не считать вырез 526. Внешняя поверхность полуцилиндрической проксимальной секции 522, продолжающаяся продольно в дистальном направлении, содержит пару сквозных отверстий 530, продолжающихся вовнутрь корпуса, которые, в общем, продольно выровнены и расположены вдоль верхней линии полуцилиндрической проксимальной секции 522. Дальше продольно в дистальном направлении, на расстоянии от сквозных отверстий 530 находится полуцилиндрический буртик 532, выполняющий функцию увеличения диаметра корпуса 516, 518 по сравнению с цилиндрической проксимальной секцией 522, которая имеет, в общем, постоянный диаметр. Дистально от буртика 532 продолжается консольная часть 536. Консольная часть 536 содержит, в общем, плоскую внешнюю поверхность 538, которая переходит в наклонную краевую поверхность 540, включающую в себя параллельные стороны с закругленным проксимальным концом 542. Краевая поверхность примыкает к, по существу, плоской внутренней поверхности 544, которая, по существу, параллельна плоской внешней поверхности 538. Внутренняя поверхность 544 содержит круглое углубление 546 и содержит кольцевую окружную поверхность 548, которая продолжается между внутренней поверхностью и нижней плоской поверхностью 550 углубления. Внутренняя поверхность содержит также участок прямоугольного углубления 552, который продолжается дистально в вогнутую полуцилиндрическую внутреннюю поверхность 554 буртика 532. Следует отметить, что полуцилиндрическая внутренняя поверхность 554 буртика 532 принимает такие же размеры, как полуцилиндрическая внутренняя поверхность цилиндрической проксимальной секции 522. Однако, полуцилиндрическая внутренняя поверхность 554 цилиндрической проксимальной секции 522 содержит дистальное ребро 558, имеющее, в общем, такую же форму, как частично закрытый полукруглый дистальный конец 524. Подобно полукруглому дистальному концу 524, дистальное ребро 558 также содержит вырез 560, который продольно совмещен с другим вырезом 526 таким образом, что вырезы имеют, в общем, одинаковые размеры. Когда корпуса 516, 518 сводят, дистальные ребра 558 совмещаются между собой по вертикали таким образом, что вырезы 560, 526 совместно обеспечивают пару сквозных отверстий. В то же время, дистальные концы 524 корпусов также совмещаются с созданием внутренней полости, которая вмещает поджимную пружину 564 и зубчатый ловитель 566 в составе вилки 514.
Как показано на фиг. 36, 37 и 39-41, зубчатый ловитель 566 содержит проксимальный цилиндрический участок 568, имеющий равномерное кольцевое сечение и продолжающийся, по существу, линейно. Равномерное кольцевое сечение выполнено в размер для вмещения поджимной пружины 564 после сборки. Проксимальный цилиндрический участок 568 является пустотелым и содержит круглую проксимальную торцовую стенку 570, содержащую пару круглых отверстий 572, каждая из которых выполнена с возможностью размещения на проход соединительных проволок 194. Удлиненное отверстие 574 большего размера находится между круглыми отверстиями 572 и выполнено с возможностью размещения на проход проволочной тяги 408 и проволок 492 высвобождения зажима.
В дистальном направлении от цилиндрического участка 568 продолжается вмещающий зубья наконечник 576, имеющий медиальную M и латеральную L секции, которые продолжаются в медиальном и латеральном направлениях от цилиндрического участка. Между медиальной и латеральной секциями находится цилиндрическая полость 577, совмещенная с пустой полостью проксимального цилиндрического участка 568. Каждая секция вмещающего зубья наконечника 576 содержит, в общем, прямоугольное поперечное сечение, без учета ряда дистальных зубьев 578. В частности, зубья 578 имеют пилообразный рисунок и сформированы для продолжения в медиально-латеральном направлении (перпендикулярно продольной оси, продолжающейся через цилиндрический участок 568). В приведенном примерном варианте осуществления, зубья 578 выполнены в размер для вмещения соответствующих зубьев 580 пары зубчатых пластин 582.
Как показано на фиг. 42-44, зубчатые пластины 582 также входят в состав вилки 514, и каждая зубчатая пластина 582 содержит круглую, в общем, плоскую пластину. Приблизительно двести двадцать пять градусов пластины имеют кольцевую окружную поверхность 584. А остальные сто тридцать пять градусов окружной поверхности сформированы так, чтобы содержать ряд зубьев 580. Как изложено выше, зубья 580 выполнены в размер для вмещения между зубьями 578 зубчатого ловителя 566. По центру в середине каждой зубчатой пластины 582 находится сквозное отверстие 586, ограниченное параллельными линейными сторонами 588 и изогнутыми концами 590. Данные сквозные отверстия 586 выполнены с возможностью вмещения соответствующего полушарнира 594, чтобы допускать или ограничивать перемещение полушарнира.
Как показано на фиг. 35-37, сборка вилки 514 включает в себя вставку проксимального цилиндрического участка 568 зубчатого ловителя 566 в цилиндрическую полость, оконтуренную спиральной формой поджимной пружины 564. Сборка вилки 514 включает в себя также совмещение нижнего и верхнего корпусов 516, 518 вилки таким образом, чтобы кромки, по которым стыкуются внешние и внутренние поверхности, совпадали и перекрывали одна другую. Кромки можно сварить или склеить с использованием обычных методов. Конструкция, полученная в результате сборки корпусов 516, 518, образует дистальную цилиндрическую полость 598 и проксимальную цилиндрическую полость 600, между которыми расположена круглая стенка, содержащая сквозное отверстие. Как изложено выше, круглая стенка формируется смыканием дистальных ребер 558 корпусов 516, 518, а отверстие формируется смыканием вырезов 560. Дистальная цилиндрическая полость 598 выполнена в размер для вмещения зубчатого ловителя 566, вставленного в поджимную пружину 564 таким образом, чтобы конец поджимной пружины, противоположный зубчатому ловителю, приходил в контакт с круглой стенкой для обеспечения стопора, до которого может быть сжата пружина. При этом, дистальный конец 524 становится закрытым, за исключением отверстия, сформированного сомкнутыми вырезами 526. Как упоминалось выше, соединительная проволока 261 имеет рабочее соединение с рычагом 236. Упомянутая проволока 261 также продолжается через полужесткую трубку 112 и через отверстия, до подхода к зубчатому ловителю 566, при этом, проволока закреплена к зубчатому ловителю для облегчения изменения положения зубчатого ловителя.
Как показано на фиг. 35-48, вилка 514 соединена с универсальным шарниром 610. Данный универсальный шарнир 610 содержит первый полушарнир 594, соединенный со вторым полушарниром 596. Чтобы обеспечивать поперечное изменение положения, полушарниры 594, 596 соединены с вилкой 514. В частности, полушарниры 594, 596 одинаковы, и в дальнейшем, по существу, для краткости приведено подробное описание только одного из полушарниров.
Каждый полушарнир 594, 596 содержит дистальную опорную часть 624, имеющую, по существу, плоскую внутреннюю поверхность 626, которая окружает выступающее опорное кольцо 628. Отверстие 630 продолжается через опорное кольцо 628 и через опорную часть 624, но частично закрыто внешним выпуклым колпаком 634, который сформирован в одно целое с опорной частью. Колпак 634 содержит V-образную прорезь 636, которая продолжается в отверстие 630 на одной стороне, и паз 638, который продолжается в отверстие с противоположной стороны. Паз 638 продолжается в проксимальном направлении за колпак 634 и проходит по изогнутой траектории, частично охватывающей проксимальный конец 640 полушарнира, и заканчивается вблизи цельновыполненной платформы 642, имеющей круглый профиль. Полукруглая внутренняя поверхность 646 платформы 642 является, по существу, плоской и содержит радиальную прорезь 648 с изогнутыми боковыми стенками и закругленным концом, которая продолжается к центру. Изогнутые боковые стенки служат для уменьшения ширины прорези 648 по мере того, как увеличивается расстояние от внутренней поверхности 646. Радиальная прорезь 648 продолжается также наружу через кольцевую окружную поверхность 650. Окружная поверхность 650 определяет внешние границы кольцеобразной плоской внешней поверхности 652, которая окружает вертикальный выступ 656. Именно данный вертикальный выступ 656 продолжается через отверстие 586 соответствующей зубчатой пластины 582, чтобы обеспечивать установку зубчатой пластины на полускобе 620 (смотри фиг. 42). В примерном варианте, вертикальный выступ 656 продолжается перпендикулярно из кольцеобразной поверхности 652 и содержит пару параллельных прямолинейных сторон 658, между которыми расположена пара изогнутых сторон 660, которые совместно ограничивают верхнее плато 662.
В примерном варианте, дистальная опорная часть 624 содержит кольцевую окружную поверхность 664, соединяющееся с сужением 666 для соединения дистальной опорной части 624 с цельновыполненной платформой 642. Сужение 666 содержит также изогнутую стенку 668, выполненную с возможностью согласования с контуром кольцевой окружной поверхности 650 противоположного полушарнира 594, 596. Сужение 666 дополнительно содержит выровненный по центру блок 672, имеющий плоскую поверхность 674, параллельную внутренней поверхности 646 платформы 642. Данная плоская поверхность 674 частично содержит полуостровную приподнятую часть 678, имеющую изогнутые боковые стенки и наружный закругленный конец. Изогнутые боковые стенки служат для уменьшения ширины полуостровной приподнятой части 678 по мере того, как увеличивается расстояние от плоской поверхности 674. Как подробно поясняется в дальнейшем, размеры полуостровной приподнятой части 678 являются, в общем, такими же, как размеры радиальной прорези 648, и поэтому полуостровная приподнятая часть первого полушарнира 594, 596 вмещается в радиальную прорезь второго полушарнира, чтобы совмещать полушарниры при сборке. Блок 672 содержит также участок паза 638 с одной стороны, а также упомянутый блок содержит паз 682, имеющий полукруглое сечение и продолжающийся, по существу, по прямой линии, кроме проксимального наклона. Паз 682, в общем, выровнен по центру и продолжается радиально к внутренней поверхности 626 дистальной опорной части 624. В примерном варианте, линейный паз 682 находится между полуостровной приподнятой частью 678 и радиальной прорезью 648, которые, в общем, параллельны между собой и находятся в горизонтально смещенном положении.
Как показано на фиг. 42, 43 и 45-48, сборка универсального шарнира 610 включает в себя ориентирование полушарниров 594, 596 таким образом, чтобы внутренние поверхности 626 опорных частей 624 были обращены одна к другой. Аналогично, сужения 666 полушарниров 594, 596 ориентируют с примыканием одного к другому, чтобы полуостровная приподнятая часть 678 первого полушарнира 594 вмещалась внутри радиальной прорези 648 второго полушарнира 596, и, следовательно, внутренняя поверхность 646 платформы 642 второго полушарнира контактировала с плоской поверхностью первого полушарнира. В данной ориентации, полушарниры 594, 596 перемещаются один относительно другого (смотри фиг. 46) с образованием ограниченного по окружности сквозного отверстия 688. После того, как полушарниры 594, 596 собраны друг с другом в вышеописанной ориентации, на каждый из полушарниров устанавливают соответствующие зубчатые пластины 582. В примерном варианте, каждую зубчатую пластину 582 ориентируют так, чтобы отверстие 586 совмещалось с вертикальным выступом 656. В частности, параллельные стороны 658 вертикального выступа 656 совмещают для вставки с параллельными сторонами 588, ограничивающими отверстие 586, а изогнутые стороны 660 вертикального выступа совмещают для вставки с изогнутыми концами 590, ограничивающими отверстие. Затем, положения нижнего и верхнего корпусов 516, 518 вилки изменяют для вставки полушарниров 594, 596. В частности, круглое углубление 546 каждого корпуса вмещает соответствующий вертикальный выступ 656 полушарнира 594, 596. Круговая граница углубления 546 немного больше в диаметре, чем расстояние между изогнутыми сторонами 660 выступов, что позволяет выступам поворачиваться в углублениях. Следует ответить, что дуга сторон 660 является более выраженной, чем дуга стенки 548, ограничивающей выступ, но не настолько, чтобы присутствовал значительный люфт. В то же самое время, когда полушарниры 594, 596 закладывают между нижним и верхним корпусами вилки, обе зубчатые пластины 582 ориентируют так, чтобы, по меньшей мере, один зуб 580 вмещался внутрь зазора между зубьями 578 зубчатого ловителя 566. Когда зубья 580 зубчатых пластин 582 находятся в зацеплении с зубьями 578 зубчатого ловителя 566, поворотное движение (изменение угла в горизонтальной плоскости) полушарниров 594, 596 относительно нижнего и верхнего корпусов 516, 518 вилки заблокировано. И, наоборот, когда зубья 580 зубчатых пластин 582 не находятся в зацеплении с зубьями 578 зубчатого ловителя 566, полушарниры 594, 596 могут поворачиваться относительно нижнего и верхнего корпусов 516, 518 вилки. Стандартное положение зубчатого ловителя 566 создает зацепление между соответствующими зубьями 578, 580 за счет поджимного усилия, действующего на зубчатый ловитель со стороны пружины 564. Однако, упомянутое поджимное усилие можно преодолевать вытягиванием зубчатого ловителя 566 в проксимальном направлении с использованием соединительной проволоки 261, одновременно присоединяемой к зубчатому ловителю и переустанавливаемому рычагу 236. В частности, для фиксации углового положения полушарниров 594, 596 относительно нижнего и верхнего корпусов 516, 518 вилки, рычаг 236 поворачивают в дистальном направлении, чтобы предоставить поджимному усилию пружины 564 прижимать зубчатый ловитель 566 в зацепление с зубчатыми пластинами 582. Для деблокирования полушарниров 594, 596 относительно нижнего и верхнего корпусов 516, 518 вилки, рычаг 236 поворачивают в проксимальном направлении, чтобы преодолеть поджимное усилие пружины 564, и, тем самым, сжимают пружину и выталкивают зубчатый ловитель 566 из зацепления с зубчатыми пластинами 582. Когда происходит упомянутое выталкивание, полушарниры 594, 596 могут, как одно целое, изменять свою угловую горизонтальную ориентацию относительно нижнего и верхнего корпусов 516, 518 вилки и имеют диапазон 160 градусов угловой регулировки. Данная угловая регулировка и соответствующая угловая ориентация передаются от полушарниров 594, 596 скобе 614.
В примерном варианте, вилка 514 (корпуса 516, 518, пружина 564 и зубчатый ловитель 566), зубчатые пластины 582 и полушарниры 594, 596 совместно формируют дистальную часть пассивного механизма. Данный пассивный механизм допускает или блокирует поворот концевого эффектора 118 вокруг вертикальной оси (т.е. из стороны в сторону), в зависимости от того, поджат ли зубчатый ловитель 566 в дистальном направлении пружиной 564 в зацепление с зубчатыми пластинами 582. Поскольку зубчатый ловитель 566 либо находится, либо не находится в зацеплении с зубчатыми пластинами 582, механизм считается пассивным. Другими словами, в отличие от ранее описанного активного механизма, данный пассивный механизм не выполняет функцию изменения положения концевого эффектора из стороны в сторону. Напротив, данный пассивный механизм обеспечивает полную свободу поперечного перемещения в пределах диапазона движений вилки 514 относительно полушарниров 594, 596, когда зубчатый ловитель 566 не находится в зацеплении с зубчатыми пластинами 582. В примерном варианте предполагается, что робототехнический инструмент (не показанный) или элемент анатомической структуры (т.е. само сердце) в сочетании с давлением, прилагаемым к дистальному концу полужесткой трубки 112, будет изменять положение концевого эффектора в поперечном направлении (например, как показано в примерном варианте в виде трех положений, изображенных на фиг. 17B) после того, как произведут манипуляцию устройством 110 управления (в частности, рычагом 236), чтобы вывести зубчатый ловитель 566 из зацепления с зубчатыми пластинами 582. Пока зубчатый ловитель 566 расцеплен с зубчатыми пластинами 582, концевой эффектор 118 может изменять положение (т.е. не зафиксирован поперечно в одном месте). Но когда приводят в действие рычаг 236, чтобы преобладало усилие пружины 564, и зубчатый ловитель 566 вошел в зацепление с зубчатыми пластинами 582, поперечное изменение положения концевого эффектора 118 блокируется.
Как показано на фиг. 49-52, скоба 614 содержит цилиндрический проксимальный конец 690 неразъемно соединенный с нижней опорой 692 и верхней опорой 694, которые имеют одинаковую форму. В частности, как подробно поясняется в дальнейшем, цилиндрический проксимальный конец 690 содержит сквозную полость 696, которая продолжается в свободное пространство 698 между нижней опорой 692 и верхней опорой 694, для размещения некоторых частей переустанавливаемого механизма 116.
В примерном варианте, цилиндрический проксимальный конец 690 содержит окружную прорезь 702, выполняющую функцию разделения цилиндрического проксимального конца на два диска 704. Каждый диск 704 является зеркальным отображением другого и содержит закругленную окружную поверхность 706, имеющую, в общем, постоянную ширину и определяющую внешние границы, по существу, плоской боковой поверхности 708, которая, в общем, перпендикулярна окружной поверхности. Данная боковая поверхность 708 является, в общем, кольцеобразной и ограничивает цилиндрическое углубление 710, которое не продолжается полностью сквозь диск 704 и равноудалено от кромки окружной поверхности 706. В примерном варианте, цилиндрическое углубление 710 ограничено верхним коническим кольцом 714, после которого расположено кольцо 716 постоянного диаметра, за которым расположено второе коническое кольцо 718, которое примыкает к, по существу, плоской нижней поверхности 720, параллельной боковой поверхности 708.
Окружная прорезь 702 между дисками 704 продолжается по полукруглой траектории и пересекает сквозное отверстие 722, продолжающееся сквозь нижнюю опору 692 и верхнюю опору 694. Напротив сквозного отверстия 722, на проксимальном конце прорези 702 сформировано V-образное отверстие, которое является частью сквозной полости 696, при этом, дистальная оконечность отверстия определяется прямоугольной границей 724, которая является смежной с круговой стенкой 726, которая определяет границы цилиндрического участка сквозной полости. Нижняя и верхняя секции прорези 702 вмещают соответствующую соединительную проволоку 194, при этом, каждая соединительная проволока продета внутри участка прорези таким образом, что натягивание первой из соединительных проволок вынуждает скобу 614 двигаться вверх (т.е. вентрально), а натягивание второй из соединительных проволок вынуждает скобу двигаться вниз (т.е. дорсально). В частности, соединительные проволоки 194 частично обмотаны вокруг скобы 614 посредством укладки внутри участка прорези 702 и окончания в полости, в которой соединительную проволоку 194 закрепляют на месте.
В дистальном направлении от дисков 704 продолжаются верхняя опора 694 и нижняя опора 692. Как верхняя опора 694, так и нижняя опора 692 содержат закругленную консольную часть, имеющую относительно плоскую внешнюю поверхность 732, которая переходит в наклонную окружную поверхность 734, которая, в свою очередь, переходит в вертикальную окружную поверхность 736, которая перпендикулярна внешней поверхности. Следует отметить, что толщина верхней опоры 694 по вертикали больше, чем такая же толщина нижней опоры 692, но, если не считать упомянутой разности по толщине, верхняя опора и нижняя опора являются идентичными. Вертикальная окружная поверхность 736 определяет внешнюю границу многоуровневой внутренней поверхности 738. В частности, внутренняя поверхность 738 частично образована приподнятым плато 740, имеющим относительно плоскую торцовую поверхность 742, примыкающую к относительно плоской вертикальной боковой стенке 744, которая смещена от средней линии скобы 614. К боковой стенке 744 примыкает относительно плоская горизонтальная стенка 746, к которой примыкает прямоугольная U-образная прорезь 748. Плато 740, боковая стенка 744, горизонтальная стенка 746 и U-образная прорезь 748 совместно создают ступенчатое сечение. Однако, U-образная прорезь продолжается в дистальном направлении не настолько далеко, как боковая стенка 744 и горизонтальная стенка 746, так как U-образная прорезь заканчивается проксимальной стенкой 752, которая находится дистально относительно концов боковой стенки и горизонтальной стенки, которые заканчиваются на задней стенке 754. Вблизи задней стенки 754, как верхняя опора 694, так и нижняя опора 692 содержат пару вертикальных сквозных отверстий, которые совмещены с ответными сквозными отверстиями и вмещают пару установочных пальцев 758. Как подробно поясняется в дальнейшем, установочные пальцы одновременно устанавливают в верхнее основание 694 и нижнее основание 692, а также в переустанавливаемый узел 760 браншей.
Как показано на фиг. 49, 50 и 52-54, переустанавливаемый узел 760 браншей содержит натяжное звено 764, имеющее рабочее соединение с соединительной проволокой 194 на своем проксимальном конце и одновременно соединенное с правой и левой соединительными пластинами 766, 768 на своем дистальном конце. В приведенном примерном варианте осуществления, натяжное звено 764 содержит пустотелый цилиндр 770, закрепленный к миниатюрной вилке 772. В частности, пустотелый цилиндр 770 закреплен для продолжения перпендикулярно от основания вилки 772 и выполнен с возможностью размещения в нем соединительной проволоки 194. В частности, соединительная проволока 194 приклеена к внутренней области пустотелого цилиндра 770, и поэтому натяжение соединительной проволоки в проксимальном направлении производит изменение положения натяжного звена 764 в проксимальном направлении. Данное изменение положения в проксимальном направлении производит также изменение положения концов соединительных пластин 766, 768, закрепленных к вилке 772. В примерном варианте, вилка 772 содержит пару разнесенных выступающих консолей 774, имеющих, в общем, постоянную ширину и высоту вдоль их продольной длины. Каждая выступающая консоль 774 заканчивается пустотелым кольцом 776, имеющим высоту, в общем, равную высоте выступающих консолей, а ширину, которая больше ширины выступающих консолей. Ширина обоих колец 776, в общем, одинакова и выполнена в размер для входа без зазора между соответствующими вертикальными стенками 744 нижней опоры 692 и верхней опоры 694, чтобы обеспечивать линейное движение вилки 772 относительно скобы 614.
Как показано на фиг. 55-57, скоба 614 содержит также установленную на ней пару правых и левых соединительных зажимов 780, 782, которые одновременно установлены на соединительные пластины 766, 768. В примерном варианте, правые и левые соединительные зажимы 780, 782 являются зеркальным отображением друг друга, и каждый содержит проксимальное сквозное отверстие 786, которое вмещает установочный палец 758 скобы 614 для шарнирно-поворотной установки правого и левого соединительных зажимов на скобе. При этом, правые и левые соединительные зажимы 780, 782 содержат второе сквозное отверстие 788, дистальное относительно проксимального отверстия 786, которое вмещает установочный палец 790, который одновременно вмещается через отверстие 792 на концах соединительных пластин 766, 768. Отверстия 792 на концах соединительных пластин 766, 768 имеют диаметр больше диаметра установочного пальца 790, и поэтому соединительные пластины могут изменять положение по углу поворота вокруг установочного пальца. И, наоборот, второе сквозное отверстие 788 имеет, в общем, такой же диаметр, как диаметр установочного пальца 790, вследствие чего установочный палец фиксируется во втором сквозном отверстии по фрикционной посадке. Противоположно концам соединительных пластин 766, 768 находится внутреннее сквозное отверстие 794, имеющее диаметр больше диаметра установочного пальца 796, который вмещается в кольца 776 вилки по фрикционной посадке. Таким образом, соединительные пластины 766, 768 могут изменять положение по углу поворота относительно установочного пальца 796 и вилки 772. На дистальном конце каждого правого и левого соединительного зажима 780, 782 находится закругленный плоский наконечник 798, который окружает дистальное отверстие 800, имеющее форму луны в третьей четверти. В частности, дистальный наконечник 798 имеет такие размеры, что ширина наконечника больше ширины остальной части соединительных зажимов 780, 782. В частности, дистальный наконечник 798 закруглен для продолжения к внутренней области переустанавливаемого узла 760 браншей. Как подробно поясняется в дальнейшем, закругленный профиль дистального наконечника согласуется с цилиндрическим профилем соответствующей бранши 806, 808.
При сборке, концы соединительных пластин 766, 768 устанавливают между пустотелыми кольцами 776 вилки 772. Противоположные концы соединительных пластин 766, 768 вставлены между соответствующими правыми и левыми соединительными зажимами 780, 782. Соответственно, левые соединительные зажимы 782 непосредственно перекрывают друг друга и разнесены между собой на толщину левой соединительной пластины 768 и соответствующий зазор, выполняющий функцию обеспечения перемещения между левой соединительной пластиной и левыми соединительными зажимами. Аналогично, правые соединительные зажимы 780 непосредственно перекрывают друг друга и разнесены между собой на толщину правой соединительной пластины 766 и соответствующий зазор, выполняющий функцию обеспечения перемещения между правой соединительной пластиной и правыми соединительными зажимами. В то же время, расстояние между верхней опорой 694 и нижней опорой 692 вблизи плато 740 с правой стороны немного больше, чем сумма толщин правых соединительных зажимов 780 и правой соединительной пластины 766. Аналогично, расстояние между верхней опорой 694 и нижней опорой 692 вблизи плато 740 с левой стороны немного больше, чем сумма толщин левых соединительных зажимов 782 и левой соединительной пластины 768. После сборки, соединительные пластины 766, 768 могут изменять положение по углу поворота относительно вилки 772 и правых и левых соединительных зажимов 780, 782, а правые и левые соединительные зажимы могут изменять положение по углу поворота относительно соединительных пластин и относительно установочных пальцев 758 скобы 614. Как подробно поясняется в дальнейшем, отведение вилки 772 в проксимальном направлении (смотри фиг. 49) внутри скобы 614 служит для расширения зазора между закругленными концами 798 правых и левых соединительных зажимов 780, 782. И, наоборот, изменение положения вилки 772 в дистальном направлении относительно скобы 614 служит для уменьшения зазора между закругленными концами 798 правых и левых соединительных зажимов 780, 782. Таким образом, изменение положения вилки 772 косвенно производит изменение положения правой и левой браншей 806, 808.
Как показано на фиг. 49, 58 и 59, правая и левая бранши 806, 808 являются зеркальными отображениями друг друга и, соответственно, установлены на правые и левые соединительные зажимы 780, 782. Соответственно, для краткости, далее показана и поясняется со ссылкой на фиг. 58 и 59 только левая бранша. Каждая бранша 806, 808 содержит проксимальную концевую вилку 810, которая содержит верхнюю закругленную полку 814, которая расположена на некотором расстоянии от нижней закругленной полки 816. Каждая полка 812, 814 содержит сквозное отверстие 818, способное вместить цилиндрический установочный палец 820 в форме полумесяца. Данный установочный палец 820, при одновременном размещении в сквозных отверстиях 818 полок 812, 814, вмещается также в дистальное отверстие 800 соответствующей пары соединительных зажимов 780, 782. В примерном варианте, установочный палец 820 вмещается в сквозное отверстие 818 по фрикционной посадке, так что установочный палец не может поворачиваться в сквозном отверстии. Напротив, установочный палец 820 в форме полумесяца не занимает всю область дистальных отверстий 800 в форме луны в третьей четверти. Таким образом, между стенками, ограничивающими дистальное отверстие, и установочным пальцем 820, существует люфт, так что установочный палец может изменять положение по углу поворота относительно соответствующих соединительных зажимов 780, 782. Для дополнительной стабилизации соединения между соответствующей браншой 806, 808 и соответствующими соединительными зажимами 780, 782, каждая бранша содержит выступ 824, который продолжается в проксимальном направлении из вертикальной стенки 826, которая соединяет полки 812, 814 на их соответствующих дистальных концах. Толщина данного выступа 824 приблизительно равна зазору между соответствующими перекрывающимися соединительными зажимами 780, 782, чтобы не допускать прижатия друг к другу дистальных концов 798 соединительных зажимов. Более того, благодаря выступу 824, сжатие ослабляется, и, в той степени, в которой происходит сжатие, перекрывающиеся соединительные зажимы 780, 782 прижимаются к выступу, а не один к другому.
В дистальном направлении от проксимального конца вилки 810 продолжается удлиненная направляющая 830, имеющая выпуклый внешний продольный профиль и вогнутый внутренний продольный профиль. Удлиненная направляющая 830 имеет преобладающий продольный размер и вертикальный размер, который приближенно равен толщине зажимного участка 1162, 1164 (смотри фиг. 75) и продолжается за пределы упомянутой толщины. В примерном варианте, дистальный конец 832 направляющей 830 закруглен. Между дистальным концом 832 и вилкой 810 проксимального конца находится пара поперечных сквозных отверстий 836, 838, которые вмещают нити 840 для крепления бранши 806, 808 к соответствующему зажимному участку 1162, 1164. Внешняя поверхность 844 направляющей 830 содержит продольный паз 846, который продолжается от дистального конца 832, пересекает каждое из сквозных отверстий 836, 838, проходит в проксимальном направлении через вертикальную стенку 826 и заканчивается около выступа 824. Данный паз 846 вмещает соответствующую проволоку 492 высвобождения зажима, которая соединена со съемным хвостовиком 490 устройства 110 управления. В примерном варианте, нить 840 одновременно наматывают (петлей) на проволоку 492 высвобождения зажима и соответствующий сегмент зажима. Таким образом, когда зажим готов к установке, съемный хвостовик 490 перемещают в проксимальном направлении относительно остальной части устройства 110 управления, с вытягиванием, тем самым, проволок 492 высвобождения зажима в проксимальном направлении. Сначала конец проволок 492 высвобождения зажима полностью проходит через дистальную нить 840, затем полностью проходит через проксимальную нить 840, с высвобождением, тем самым, зажима из направляющих 830 и остальной части лапароскопического устройства 100.
Как показано на фиг. 44, 60 и 61, переустанавливаемый узел 760 браншей можно спрямлять в линию, чтобы вставлять через троакар для анатомического развертывания. Сначала, как показано на фиг. 60 и 61, переустанавливаемый узел 760 браншей спрямляют в линию, в сжатое положение по ширине. В данном положении, первая поверхность 850 каждого установочного пальца 820 обеих браншей 806, 808 контактирует с первой поверхностью 852, определяющей участок отверстия 800 в форме луны в третьей четверти.
Как показано на фиг. 44 и 62-66, чтобы раскрыть бранши 806, 808, натяжное звено 764 вытягивают в проксимальном направлении соединительной проволокой 194. Проксимальное перемещение натяжного звена 764 вынуждает концы правой и левой соединительных пластин 766, 768, соединенных с натяжным звеном, изменить положение в проксимальном направлении путем поворота вокруг установочного пальца 796, продолжающегося через натяжное звено. Поскольку противоположные концы соединительных пластин 766, 768 шарнирно-поворотно соединены с правыми и левыми соединительными зажимами 780, 782 посредством установочных пальцев 790, то движение натяжного звена выполняет функцию разведения между собой дистальных концов соединительных зажимов. Как изложено ранее, отверстие 800 в форме луны в третьей четверти допускает ограниченного поворотное движение установочного пальца 820 соответствующей бранши 806, 808 относительно соединительных зажимов 780, 782. Таким образом, взаимное относительное поворотное движение соединительных зажимов 780, 782 и браншей 806, 808 вынуждает дистальные концы браншей 806, 808 сначала приблизиться друг к другу, а проксимальные концы браншей раздвинуться друг от друга, как показано на фиг. 62. В то время, как соединительные пластины 766, 768 поворачиваются относительно соединительных зажимов 780, 782, соединительные зажимы также способны поворачиваться относительно браншей 806, 808, что подтверждается отдалением первой поверхности 850 установочного пальца 820 от первой поверхности 852 соединительных зажимов, как показано на фиг. 63. Продолжение перемещения натяжного звена 764 в проксимальном направлении приводит, в результате, к еще большему разведению дистальных концов соединительных зажимов 780, 782 друг от друга, как показано на фиг. 64. При нахождении в данном положении, как показано на фиг. 65, дальнейшее взаимное относительное поворотное движение браншей 806, 808 и соединительных зажимов 780, 782 блокируется второй поверхностью 854 установочного пальца 820, контактирующей со второй поверхностью 856 соединительных зажимов, которая определяет участок отверстия 800 в форме луны в третьей четверти. Другими словами, поверхности 852, 856 соединительных зажимов 780, 782 обеспечивают границы диапазона движения, между которыми поворачивается установочный палец 820. Когда вторые поверхности контактируют между собой, между соединительными зажимами 780, 782 и браншами 806, 808 получают максимальный угол. Затем, продолжение перемещения натяжного звена 764 в проксимальном направлении до максимальной проксимальной конечной точки (т.е. предела хода) вынуждает дистальные концы соединительных зажимов 780, 782 раздвинуться на максимальное расстояние, которое соответствует разведению дистальных концов браншей 806, 808 друг от друга, как показано на фиг. 66. В примерном варианте, когда натяжное звено 764 достигает максимальной проксимальной конечной точки, бранши 806, 808 приходят в параллельное положение. Данное параллельное положение нельзя будет получить иным способом, без некоторого взаимного относительного поворотного движения браншей 806, 808 и соединительных звеньев 780, 782. Как показано на фиг. 67, без взаимного относительного поворотного движения соединительных звеньев 806, 808 и браншей 806, 808, бранши будут принимать угловую ориентацию соединительных звеньев и никогда не придут в параллельное положение, при разведении одна от другой, когда натяжное звено 764 приходит в свою проксимальную конечную точку.
На фиг. 68 и 70 показан один вариант осуществления окклюзирующего зажима 1110 ушка левого предсердия в раскрытом положении с разведенными жесткими зажимными участками 1102, 1104 и упругими или эластичными поджимными элементами 1106, 1108 на противоположных концах каждого зажимного участка 1102, 1104. Зажимные участки 1102, 1104 могут быть трубчатыми, и оба зажимных участка 1102, 1104 могут быть, по меньшей мере, по существу, параллельными между собой, когда застопорены, т.е. когда упомянутые участки не используют для зажима ткани. Зажимные участки 1102, 1104 могут иметь также, по существу, равные длины или разные длины, и каждый может иметь больший внешний диаметр, чем проволока, которая может быть использована для формирования каждого из поджимных элементов 1106, 1108. В этом отношении, проволока, формирующая поджимные элементы 1106, 1108, может продолжаться через полые внутренние области зажимных участков 1102, 1104. В приведенном наглядном примере, поджимные элементы 1106, 1108 выполнены, каждый, в форме петли. Плоскости, задаваемые петлевидной конфигурацией каждого из поджимных элементов 1106, 1108, могут быть, по существу, параллельными между собой и, в свою очередь, по существу, перпендикулярными каждому из зажимных участков 1102, 1104. Разумеется, возможны также другие угловые ориентации.
На фиг. 69 и 71 показан тот же зажим 1110, показанный на фиг. 68 и 70, с зажимными участками 1102, 1104 в их нормально поджатых сомкнутых положениях. Контакт между зажимными участками 1102, 1104 может сначала возникать по всей длине их параллельных секций, как показано. Разумеется, когда зажимные участки 1102, 1104 покрыты тканью или другими материалами, как поясняется в дальнейшем, контакт может иметь место между тканями или другими материалами. На фиг. 68-71 показаны только конструкция и относительные положения жестких элементов 1102, 1104 и поджимных элементов 1106, 1108. Окончательная сборка показана на фиг. 72-74, на которых, несмотря на изображение несколько отличающегося варианта осуществления, представлены общие этапы изготовления каждого варианта осуществления. Зажимные участки 1102, 1104 могут быть выполнены из жестких трубок 1112, 1114 из жесткого металла, например, титана, расположенных поверх проволочного элемента 1116. В приведенном варианте осуществления, титан используют по причине его совместимости с визуализацией методом ядерного магнитного резонанса (ЯМР), его биосовместимости и его гальванической совместимости с проволочным элементом 1116, когда проволочный элемент 1116 сформирован из сверхэластичных материалов, например, никель-титанового сплава. В приведенном варианте осуществления и других вариантах осуществления, раскрытых в настоящей заявке, можно применять сверхэластичный материал, например, никель-титановый сплав, для формирования поджимных элементов 1106, 1108. Сверхэластичные свойства обеспечат возможность значительного растяжения материала для раскрытия зажимных участков 1106, 1108 зажима 1110, без остаточной деформации материала. Упомянутые сверхэластичные материалы могут быть также совместимы с визуализацией методом ЯМР и свободно допустимыми в качестве материала для имплантации в тело. Жесткие трубчатые элементы 1112, 1114 в приведенном варианте осуществления механически закрепляются к базовому проволочному элементу 1116, предпочтительно, механическим обжимом титановых трубок 1112, 1114 на проволочных элементах 1116. Несмотря на то, что показан единственный непрерывный проволочный элемент, проведенный как через зажимные участки 1102, 1104, так и через поджимные элементы 1106, 1108, зажим 1110 в соответствии с данным вариантом осуществления может быть также выполнен из, по меньшей мере, двух проволок или с любыми другими подходящими компонентами.
Как показано на фиг. 72, кроме способности к смыканию на ткани или анатомической структуре в параллельной ориентации, зажим 1110 может также прикладывать усилие к анатомической структуре в непараллельной зажимной ориентации. Данная возможность позволяет зажиму 1110 приспосабливаться к неравномерной толщине ткани по длине зажимных участков 1102, 1104. Кроме того, с отдельными поджимными элементами 1106, 1108 на противоположных концах зажимных участков 1102, 1104, непараллельное сжатие может начинаться с любой стороны зажима 1110. Возможность непараллельного сжатия в данном варианте осуществления позволяет зажиму 1110 приспосабливаться к разнообразным полым анатомическим структурам с изменяющимися толщинами стенок по всей их длине и ширине. Например, некоторые анатомические структуры, например, ушки предсердий сердца, имеют внутренние структуры, называемые трабекулами, которые неравномерны и очень часто обуславливают изменения толщин вдоль, по меньшей мере, одного из их размеров. Следовательно, неравномерное зажатие может быть полезно в данном случае применения по приведенной причине или по другим причинам.
На фиг. 73 приведен альтернативный вариант осуществления зажима 1160, содержащего два поджимных элемента 1166, 1168, выполненных в форме, напоминающей букву «U», вместо более круглой петлевидной конфигурации в варианте осуществления, изображенном на фиг. 68-71. Подобно тому, как в случае с первым зажимом 1110, U-образные поджимные элементы 1166, 1168 зажима 1160 также могут находиться в плоскостях, в общем, параллельных между собой и перпендикулярных осям зажимных участков 1162, 1164. Возможное применение варианта осуществления, показанного на фиг. 73, может быть связано с меньшим усилием, прикладываемым U-образными поджимными элементами 1166, 1168 к зажимным участкам 1162, 1164, в сравнении с усилием, прикладываемым петлевидными поджимными элементами 1106, 1108 зажима 1110, показанного на фиг. 68-71, что делает данный вариант осуществления более подходящим для зажатия анатомических структур, не требующих относительно большого зажимного усилия. U-образная конфигурация поджимных элементов 1166, 1168, в общем, требует меньше места в направлении, перпендикулярном осям зажимных участков 1162, 1164. На фиг. 73 изображен первый этап сборки зажима 1160, на котором жесткие трубчатые элементы 1163, 1165 соединяют со сверхэластичным проволочным элементом 1161. В данном варианте осуществления, для присоединения трубчатых элементов 1163, 1165 к проволоке 1161 использован механический обжим. Однако, вместо данного метода можно применить клея или лазерную сварку или другие способы закрепления. Аналогично, следует понимать, что, возможно, жесткие трубчатые элементы 1163, 1165 совсем не обязательно потребуется присоединять к проволочному элементу 1161. Например, можно применить метод проектирования жестких трубчатых элементов 1163, 1165 таким образом, чтобы их внутренние диаметры просто устанавливались по плотной посадке на проволоку 1161. Кроме того, жесткие трубчатые элементы 1163, 1165 могут иметь много разных форм поперечных сечений. Формы поперечных сечений типа овалов, треугольников или прямоугольников с закругленными краями могут быть предпочтительными и могут исключать добавление распределяющих нагрузку валиков 1167, 1169, показанных на фиг. 74, так как упомянутые альтернативные формы могут обеспечить увеличение площади контакта с анатомическими структурами, подлежащими захвату зажимом 1150. Поскольку разные анатомические структуры значительно изменяются от пациента к пациенту, то полезно обеспечить способ изготовления, при котором можно легко изменять длину 1171 зажима 1160. Посредством нарезания жестких элементов 1163, 1165 с несколькими разными длинами можно сконфигурировать сборки разных размеров.
На фиг. 74 представлен следующий этап сборки зажима. На трубки из титана или другого подходящего материала, которые формируют жесткие трубчатые элементы 1163, 1165, можно надевать распределяющие нагрузку валики 1167, 1169, выполненные из пластика или другого биосовместимого материала, например, уретана, чтобы обеспечить упругую поверхность 1173 для распределения нагрузки по большей площади поверхности, что предотвращает воздействие на ткань точечной нагрузкой, которая, в противном случае, может привести к разрезанию ткани прежде, чем ткань получит возможность внутреннего сращивания. Валики 1167, 1169 можно собирать и надевать на жесткие трубчатые элементы 1163, 1165 до этапа обжима, или, в альтернативном варианте, валики 1167, 1169 можно изготавливать таким способом, чтобы обеспечивать продольную щель, которая позволяет развернуть материал и с усилием надеть на жесткие трубчатые элементы 1163, 1165.
На фиг. 75 представлен зажим 1160 после того, как зажимные участки 1162, 1164 и поджимные элементы 1166, 1168 обшиты материалом 1174 тканевой оболочки, изготовленным из такого материала, как сложный полиэфир. Следует понимать, что упомянутый материал или любые другие подобные материалы можно использовать в качестве сплошной или частичной оболочки в любом из раскрытых вариантов осуществления. В предпочтительном варианте, данный материал пригоден для захвата зажимаемой ткани анатомической структуры, а также ткани окружающих зон. В предпочтительном варианте, материал 1174 представляет собой трубку круглого сечения из двухфонтурного основовязаного трикотажного полотна, с диаметром, приблизительно, 4-5 мм и выполненного из комбинации 4/100, 2/100 и 1/100 текстурированного сложного полиэфира. Материал 1174 можно также термически обрабатывать для создания велюрового эффекта. Ткань или другой материал 1174 дополнительно нашивают или иным способом надевают на поджимные элементы 1166, 1168. Кроме того, на соответствующих противоположных концах зажимных участков 1162, 1164 можно закреплять куски 1177 ткани, чтобы предотвратить выскальзывание какой-либо части захваченной анатомической структуры из кольцевой окклюзионной зоны между зажимными участками 1162, 1164. Другими словами, куски 1177 ткани действуют как элементы или накладки для фиксации ткани на противоположных концах зажима. Приведенная или другая деталь для фиксации ткани может быть также реализована в любом другом варианте осуществления. Данное решение желательно потому, что минимизирует вероятность ненамеренного оставления в незажатом состоянии какой-либо части захваченной анатомической структуры. Материал 1177, подобно материалу 1174, может также вызывать врастание ткани.
Как показано на фиг. 76-82, вместо вышеописанного устройства 110 управления, с примерным лапароскопическим устройством 100 можно использовать альтернативное примерное устройство 1210 управления. Подобно первому устройству 110 управления, упомянутое альтернативное примерное устройство 1210 управления можно соединять с полужесткой трубкой 112, чтобы манипулировать переустанавливаемым механизмом (не показанным), имеющим рабочее соединение с концевым эффектором 118. Однако, как подробно поясняется в дальнейшем, упомянутое примерное устройство 1210 управления содержит сдвоенный пассивный механизм для управления углами поворота концевого эффектора вокруг поперечной оси (т.е. вверх и вниз) и вертикальной оси (т.е. из стороны в сторону). В примерном варианте, в отличие от первого примерного устройства 110 управления, данное альтернативное примерное устройство 1210 управления не содержит активного механизма для манипулирования углом поворота концевого эффектора 118 вокруг поперечной оси, а использует вместо этого пассивную систему, которая выполняет функцию фиксации концевого эффектора в одном из предварительно заданного числа положений по углу поворота вокруг поперечной оси.
Устройство 1210 управления содержит правый корпус 1230 и левый корпус 1232, которые совместно ограничивают внутреннюю полость и соответствующие отверстия для обеспечения сквозного размещения некоторых элементов управления. Первое из упомянутых отверстий является верхним отверстием 1234, которое обеспечивает сквозное размещение вертикально переустанавливаемой кнопки 1236. Как подробно поясняется в дальнейшем, переустанавливаемой кнопкой 1236 можно манипулировать по вертикали для фиксации и деблокирования переустанавливаемого механизма 116, чтобы обеспечивать или налагать ограничение на возможность поперечной и вертикальной регулировки концевого эффектора 118.
Переустанавливаемая кнопка 1236 содержит верхнюю часть 1238, изогнутую в проксимально-дистальном направлении, которая содержит выпуклости и проксимальный выступ для размещения большого пальца пользователя на верхней части кнопки. Медиально-латеральная ширина изогнутой верхней части 1238 является, в общем, постоянной и перекрывает вертикальный плоский выступающий элемент 1242, который продолжается из нижней стороны изогнутой верхней части. Упомянутый вертикальный выступающий элемент 1242 имеет относительно постоянный и минимальный медиально-латеральный размер, но содержит проксимально-латеральный размер, который сужается от максимального значения в том месте, где выступающий элемент продолжается из изогнутой верхней части, до минимального значения в том месте, в котором выступающий элемент заканчивается. На конце выступающего элемента 1242, пара зубчатых ловителей 1246 продолжается наружу в медиальном и латеральном направлениях из противоположных сторон выступающего элемента. Зубчатые ловители 1246 содержат, каждый, ряд продольных пирамидальных форм 1248, которые параллельны и расположены радиально для образования ряда соответствующих продольных пирамидальных полостей 1250. На медиальном конце медиального зубчатого ловителя 1246 и на латеральном конце латерального зубчатого ловителя 1246 находятся цилиндрические выступы 1252, которые вмещаются в соответствующие вертикальные удлиненные прорези 1254 на внутренней поверхности корпусов 1230, 1232. Данные прорези 1254 блокируют значительное медиально-латеральное и проксимально-дистальное перемещение зубчатых ловителей 1246, когда изменяется вертикальное положение зубчатых ловителей. Другими словами, когда кнопку 1236 нажимают в вертикальном направлении, вертикальное положение зубчатых ловителей 1246 соответственно изменяется по вертикали. Таким образом, перемещение зубчатых ловителей 1246 непосредственно обусловлено перемещением кнопки 1236, так как зубчатые ловители косвенно закреплены к кнопке через выступающий элемент 1242.
Кнопка 1236 вертикально поджата в свое наивысшее вертикальное положение, показанное на фиг. 79. Для обеспечения упомянутого поджима, корпуса 1230, 1232 содержат параллельные стенки 1258, которые совместно формируют медиально-латеральную канавку, в которой размещена, по меньшей мере, одна пружина 1260. Пружина 1260 рассчитана на пружинное усилие, достаточное для преодоления веса кнопки 1236, выступающего элемента 1242, зубчатых ловителей 1246 и цилиндрических выступов 1252, чтобы выжимать кнопку в ее наивысшее вертикальное положение. Но пружинное усилие не настолько велико, чтобы требовать приложения слишком большого усилия большим пальцем пользователя для нажатия кнопки 1236 и преодоления поджимного усилия пружины 1260.
Ось 1264 продолжается в медиально-латеральном направлении во внутренней полости, совместно ограниченной корпусами 1230, 1232. Данная ось 1264 имеет цилиндрическую форму и постоянный по длине диаметр, что придает оси замкнутый контур окружности. В примерном варианте, медиальный и латеральные концы оси 1264 вмещаются в соответствующие цилиндрические полости (не показанные) на внутренней поверхности корпусов. Глубина данных полостей не настолько велика, чтобы охватывать большую часть оси 1264. Открытый цилиндрический участок оси 1264 служит для вмещения пары зубчатых узлов 1268, 1270, между которыми расположен выступающий элемент 1242, который, сам по себе, содержит вертикально удлиненное отверстие (не показанное) для размещения на проход оси и вертикального перемещения выступающего элемента относительно оси, которая имеет постоянную ориентацию. В примерном варианте, зубчатые узлы 1268, 1270 содержат сквозное цилиндрическое отверстие 1272, позволяющее узлам поворачиваться на внешней стороне оси.
Каждый из зубчатых узлов 1268, 1270 идентичен другому. Соответственно, для краткости не дано излишнего описания второго зубчатого узла. Зубчатые узлы 1268, 1270 содержат барабан 1276, содержащий распределенные по окружности зубья 1278, которые выполнены в размер для зацепления соответствующих зубчатых ловителей 1246 и входа в продольные пирамидальные полости 1250, когда зубчатые ловители находятся в приподнятом вертикальном положении (смотри фиг. 79). Барабан 1276 имеет, в общем, постоянную ширину, за исключением пары утолщений 1280, 1282. Первое утолщение 1280, в общем, выровнено радиально по центру относительно барабана и частично ограничивает сквозное отверстие 1272, которое вмещает ось 1264. Данное первое утолщение 1280 является полукруглым по форме, продолжается в медиальном направлении из барабана 1276 и содержит соответствующие верхнюю и нижнюю изогнутые поверхности 1284, 1286, которые выстроены радиально относительно барабана. Данные изогнутые поверхности 1284, 1286 выполняют функцию криволинейных поверхностей для соответствующих соединительных проволок 1288, 1290, которые продолжаются из второго утолщения 1282. Первое утолщение 1280 содержит также пару вертикальных фланцев 1294, которые продолжаются из криволинейных поверхностей 1284, 1286 и действуют совместно с окружными торцами барабанов для обеспечения медиальной и латеральной направляющих соединительных проволок 1288, 1290 таким образом, чтобы соединительные проволоки оставались между ними. Второе утолщение 1282 ориентировано в проксимальном направлении относительно первого утолщения 1280 и содержит прямоугольный профиль с парой Г-образных стенок 1292 и нижней опорой 1296, совместно ограничивающих внутреннюю полость. Сквозь нижнюю опору и в полость продолжается отверстие (не показанное). Данное отверстие вмещает крепежную деталь (например, винт) 1300, на котором намотаны и закреплены соединительные проволоки 1288, 1290. Крепежная деталь 1300 также утоплена в полости, чтобы Г-образные стенки 1292 продолжались поперечно за конец крепежной детали. Соответственно, соединительные проволоки 1288, 1290, продолжающиеся из крепежной детали, продеты через зазор между Г-образными стенками 1292, при этом, одна из проволок продета над верхней изогнутой поверхностью 1284, а вторая проволока продета под нижней изогнутой поверхностью 1286. Затем, проволоки 1288, 1290 продолжаются в дистальном направлении и сходятся для продолжения сквозь соответствующее небольшое отверстие на проксимальном конце трубки 112.
Каждый из зубчатых узлов 1268, 1270 допускает взаимно независимое изменение положения по углу поворота. Первый зубчатый узел 1268 выполняет функцию обеспечения части пассивного переустанавливаемого механизма для управления углом поворота концевого эффектора 118 вокруг поперечной оси (т.е. вверх и вниз), а второй зубчатый узел 1270 выполняет функцию обеспечения части пассивного переустанавливаемого механизма для управления углом поворота концевого эффектора вокруг вертикальной оси (т.е. из стороны в сторону). В примерном варианте, когда кнопка 1236 не нажата, пружина 1260 производит поджатие зубчатых ловителей 1246 в зацепление с зубьями 1278 зубчатых узлов 1268, 1270, в результате чего блокируется поворот зубчатых узлов вокруг оси 1264. Когда зубчатые узлы 1268, 1279 зафиксированы на месте (смотри фиг. 79), положение концевого эффектора 118 невозможно изменить в вертикальном направлении (т.е. повлиять на угол поворота вокруг поперечной оси) или в медиально-латеральном направлении (т.е. повлиять на угол поворота вокруг вертикальной оси). Таким образом, когда зубчатые узлы 1268, 1279 зафиксированы на месте (смотри фиг. 79), то и концевой эффектор 118 зафиксирован на месте.
Чтобы изменить вертикальное или медиально-латеральное положение концевого эффектора 118, пользователь будет нажимать кнопку 1236. При нажатии кнопки 1236, зубчатые ловители 1246 производят дополнительное сжатие пружины 1260 и расцепление зубчатых узлов 1268, 1270. В частности, продольные пирамидальные формы 1248 и соответствующие продольные пирамидальные полости 1250 больше не входят в зацепление с зубьями 1278 зубчатых узлов 1268, 1270, что обеспечивает возможность поворота зубчатых узлов вокруг оси 1264. При наличии возможности свободного поворота зубчатых узлов 1268, 1270 вокруг оси 1264, можно изменять положение соединительных проволок 1288, 1290, соединяющих концевой эффектор 118 и зубчатые узлы, что позволяет свободно изменять положение концевого эффектора в вертикальном направлении (т.е. повлиять на угол поворота вокруг поперечной оси) и в медиально-латеральном направлении (т.е. повлиять на угол поворота вокруг вертикальной оси). После того, как соответствующие вертикальное и медиально-латеральное положения концевого эффектора 118 будут обеспечены, пользователь прекратит нажимать кнопку 1236, чтобы осуществить фиксацию в соответствующих вертикальном и медиально-латеральном положениях. Для фиксации в упомянутых положениях, пружина 1260 поджимает зубчатые ловители 1246 вверх и в зацепление с зубчатыми узлами 1268, 1270. Поскольку зубчатые узлы 1268, 1270 содержат зубья 1278, которые входят в зацепление с продольными пирамидальными формами 1248 зубчатых ловителей 1246, то пружина 1260 будет приводить зубчатые ловители в движение вверх и, возможно, вызывать небольшой поворот зубчатых узлов вокруг оси 1264, чтобы зубья полностью вошли в продольные пирамидальные полости 1250. Если концевой эффектор 118 находится в таком положении, что зубья 1278 совмещены с продольными пирамидальными полостями 1250, то вертикальное и медиально-латеральное положения будут точно выдерживаться благодаря натяжению соединительных проволок 1288, 1290. Однако, если концевой эффектор 118 находится в таком положении, что зубья 1278 немного не совмещены с продольными пирамидальными полостями 1250, то вертикальное и медиально-латеральное положения будут изменяться, так как зубчатые узлы 1268, 1270 немного повернуться вокруг оси 1264, чтобы зубья полностью вошли в продольные пирамидальные полости 1250. После того, как зубья 1278 совмещаются с продольными пирамидальными полостями 1250 и входят в них, вертикальное и медиально-латеральное положения будут точно выдерживаться благодаря натяжению соединительных проволок 1288, 1290.
Для обеспечения ориентации полужесткой трубки (которая вмещает соединительные проволоки 1288, 1290) относительно корпусов 1230, 1232, дистальный участок правого корпуса 1230 содержит пару фиксаторов 1302, которые находятся в зацеплении с полужесткой трубкой 112. Упомянутые фиксаторы 1302 блокируют продольное перемещение трубки 112 относительно устройства 1210 управления. Оба фиксатора 1302 продолжаются параллельно между собой и продолжаются из внутренней окружной поверхности правого корпуса 1230.
Правый и левый корпуса 1230, 1232 совместно ограничивают отверстие 1310 механизма рукоятки и проксимальное отверстие 1312, проходящие во внутренние области соответствующих корпусов. Отверстие 1310 механизма рукоятки обеспечивает размещение на проход участка механизма 1318 рукоятки, который содержит переустанавливаемую рукоятку 1320, приводное звено 1322, возвратную пружину 1324 и фиксатор 1326 проволоки. Как подробно поясняется в дальнейшем, фиксатор проволоки одновременно соединен с натяжной проволокой 1328 и приводным звеном 1322 таким образом, что перемещение рукоятки 1320 производит раскрытие и смыкание окклюзирующего зажима 1160 (смотри фиг. 75), например, во время хирургической процедуры установки окклюзирующего зажима ушка предсердия. Более подробное пояснение соответствующих компонентов механизма 1318 рукоятки приведено в дальнейшем.
Переустанавливаемая рукоятка 1320 содержит изогнутую нижнюю поверхность захвата, которая может содержать ряд выпуклостей, продольно разнесенных между собой, для облегчения захвата пользователем. Противоположно нижней поверхности захвата находится соответствующая внутренняя поверхность, из которой продолжается пара разнесенных между собой, параллельных вертикальных стенок 1330, 1332. Вертикальные стенки 1330, 1332 также соединены между собой множеством поперечных стенок 1334. Вертикальные стенки 1330, 1332 содержат, каждая, дистально выступающую петлю 1338, которая обеспечивает сквозное отверстие в медиально-латеральном направлении для вмещения оси 1340, продолжающейся из правого корпуса 1230, на которой поворачивается рукоятка 1320. Стенки 1330, 1332, продолжающиеся в дистальном направлении от петли 1338, содержат круглое отверстие, продолжающееся в медиально-латеральном направлении, которое вмещает штифт 1344 для закрепления, с возможностью изменения положения, приводного звена 1322 к рукоятке 1320.
Примерное приводное звено 1322 содержит дугообразную плоскую пластину, выполненную в размер для вставки между стенками 1330, 1332 рукоятки 1320. Дистальный конец звена 1322 содержит отверстие для вмещения штифта 1344. В проксимальном направлении от отверстия продолжается удлиненное изогнутое отверстие 1346, выполненное с возможностью вмещения установочного пальца 1348, продолжающегося от внутренней поверхности правого корпуса 1230. Таким образом, установочный палец 1348 изменяет свое положение относительно отверстия 1346 по мере того, как рукоятка 1324 изменяет положение приводного звена 1322. В примерном варианте, отверстие частично ограничено упорным выступом 1350, который выполняет функцию фиксатора установочного пальца 1348 в неподвижном положении после того, как рукоятка 1320 полностью смыкается. В то же время, проксимальный конец приводного звена 1322 содержит небольшое отверстие 1352, которое вмещает участок пружины 1324 для подтягивания рукоятки 1320 в раскрытое положение, показанное на фиг. 77. Противоположный конец пружины 1324 закреплен к установочному пальцу 1354, который продолжается от внутренней поверхности правого корпуса 1320.
Устройство 1210 управления содержит также съемный хвостовик 1360, который посажен в проксимальное отверстие 1312 корпусов 1230, 1232. Съемный хвостовик 1360 соединен с, по меньшей мере, одной проволокой 492 высвобождения зажима (в данном случае, двумя проволоками высвобождения зажима), которые выполняют функцию отсоединения окклюзирующего зажима от устройства 118 установки зажимов. Таким образом, хвостовик 1360 можно извлечь из проксимального конца устройства 1210 управления для вытягивания, тем самым, высвобождающих(щей) проволок(и) в проксимальном направлении и отсоединения окклюзирующего зажима от устройства 118 установки зажимов. В приведенном примерном варианте осуществления, хвостовик 1360 закрепляется в проксимальном отверстии 1312 на фрикционной посадке, сопротивление которой может преодолеваться давлением, приложенным пользователем к хвостовику, для перемещения хвостовика в проксимальном направлении относительно устройства 1210 управления. Однако, в объем настоящего изобретения входит также применение фиксаторов или других механизмов высвобождения принудительного действия для высвобождения хвостовика 1360 из устройства 1210 управления.
Из вышеприведенного описания и краткого изложения сущности изобретения, специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что в настоящей заявке описаны способы и устройства, составляющие примерные варианты осуществления, однако, изобретение не ограничено вышеизложенным, и в приведенные варианты осуществления могут быть внесены изменения, не выходящие за пределы объема изобретения, определяемого формулой изобретения. Кроме того, следует понимать, что изобретение определяется формулой изобретения, и предполагается, что никакие ограничения или элементы в описании примерных вариантов осуществления, раскрытых в настоящей заявке, не подлежат включению в интерпретацию какого-либо заявленного элемента, если подобное(ый) ограничение или элемент не указаны в прямой форме. Аналогично, следует понимать, что для отнесения к объему охраны любого пункта формулы изобретения не требуется обеспечивать любые или все установленные преимущества или цели настоящего изобретения, раскрытого в настоящей заявке, поскольку изобретение определяется формулой изобретения, и поскольку присущие и/или непредвиденные преимущества настоящего изобретения могут существовать даже несмотря на то, что они, возможно, не изложены в прямой форме в настоящей заявке.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНОЕ ХИРУРГИЧЕСКОЕ УСТРОЙСТВО С ЭЛЕКТРОПИТАНИЕМ С ВНЕШНИМИ РАССЕКАЮЩИМИ ЭЛЕМЕНТАМИ | 2013 |
|
RU2643402C2 |
| ГИБКИЙ ПРИВОДНОЙ ЭЛЕМЕНТ | 2013 |
|
RU2644274C2 |
| КОНФИГУРАЦИИ БРАНШЕЙ И ЭЛЕКТРОДОВ ХИРУРГИЧЕСКОГО КОНЦЕВОГО ЭФФЕКТОРА | 2013 |
|
RU2642219C2 |
| КОНФИГУРАЦИЯ ЗАКРЫТИЯ ДЛЯ ХИРУРГИЧЕСКОГО КОНЦЕВОГО ЭФФЕКТОРА С ВОЗМОЖНОСТЬЮ ПОВОРОТНОЙ АКТИВАЦИИ | 2013 |
|
RU2641372C2 |
| МНОГООСЕВЫЕ ШАРНИРНЫЕ И ПОВОРОТНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ | 2013 |
|
RU2642268C2 |
| СОЕДИНЕНИЯ ЭЛЕКТРОДОВ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ПОВОРОТНЫМ ПРИВОДОМ | 2013 |
|
RU2659629C2 |
| ХИРУРГИЧЕСКИЕ КОНЦЕВЫЕ ЭФФЕКТОРЫ С НАКЛОНЕННЫМИ КОНТАКТИРУЮЩИМИ С ТКАНЬЮ ПОВЕРХНОСТЯМИ | 2013 |
|
RU2642943C2 |
| СОЕДИНИТЕЛЬНАЯ КОНФИГУРАЦИЯ ВЗАИМОЗАМЕНЯЕМОГО КОНЦЕВОГО ЭФФЕКТОРА | 2013 |
|
RU2636182C2 |
| СЪЕМНЫЙ СЛОЙ МАТЕРИАЛА И ХИРУРГИЧЕСКИЙ КОНЦЕВОЙ ЗАЖИМ СО СЪЕМНЫМ СЛОЕМ МАТЕРИАЛА | 2014 |
|
RU2661143C2 |
| ПРИВОД ВЫСВОБОЖДЕНИЯ СЛОЯ МАТЕРИАЛА ИЗ ХИРУРГИЧЕСКОГО КОНЦЕВОГО ЭФФЕКТОРА | 2014 |
|
RU2673862C2 |
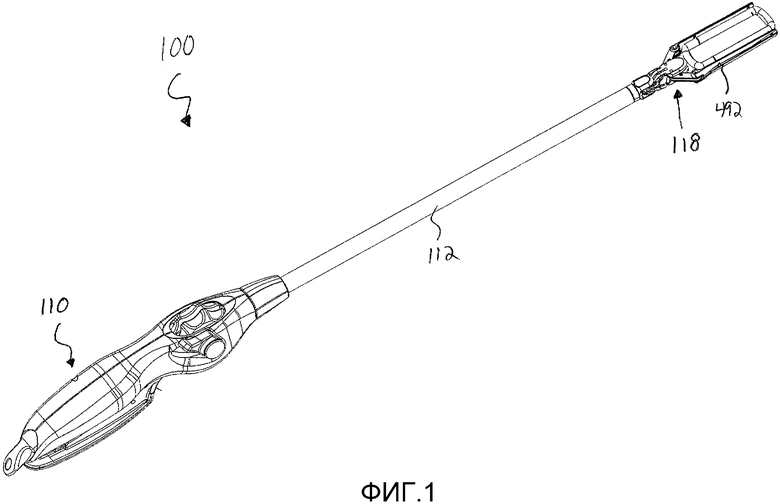
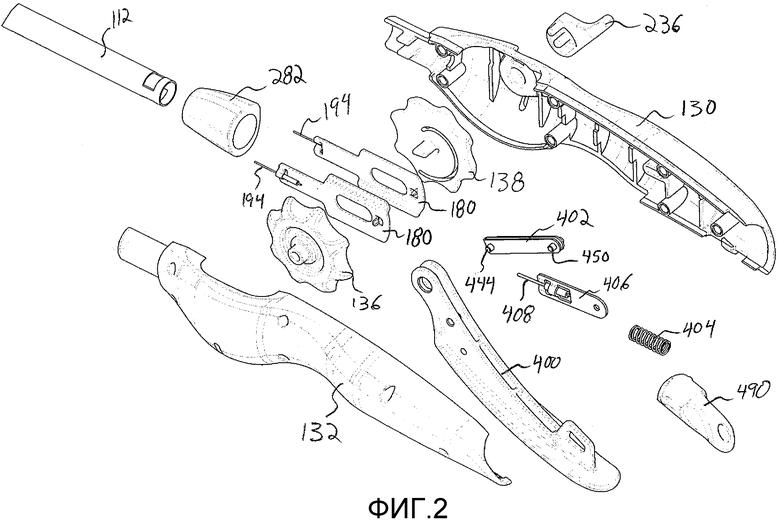
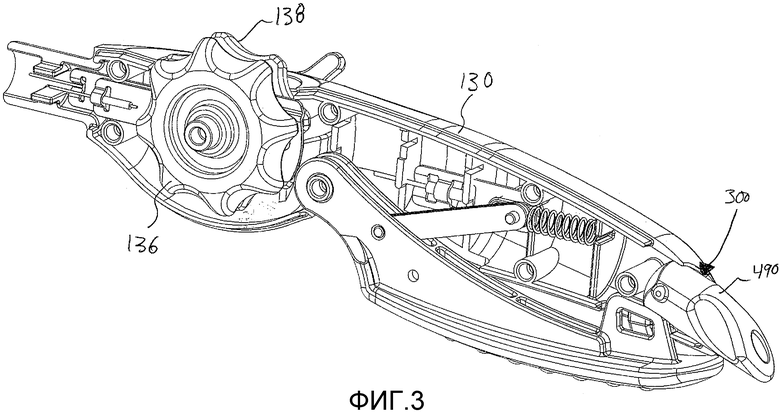
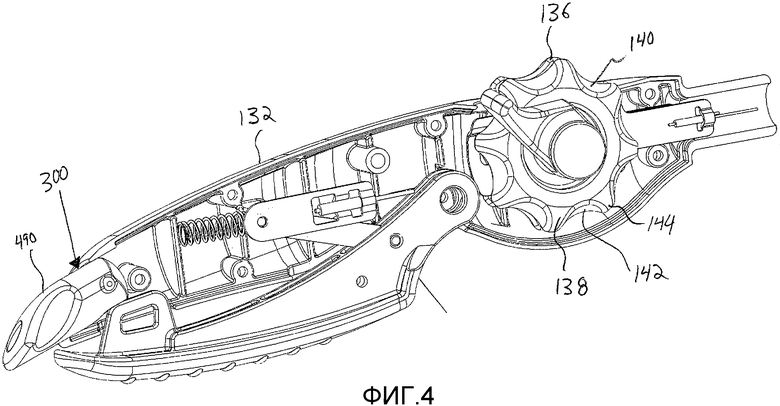
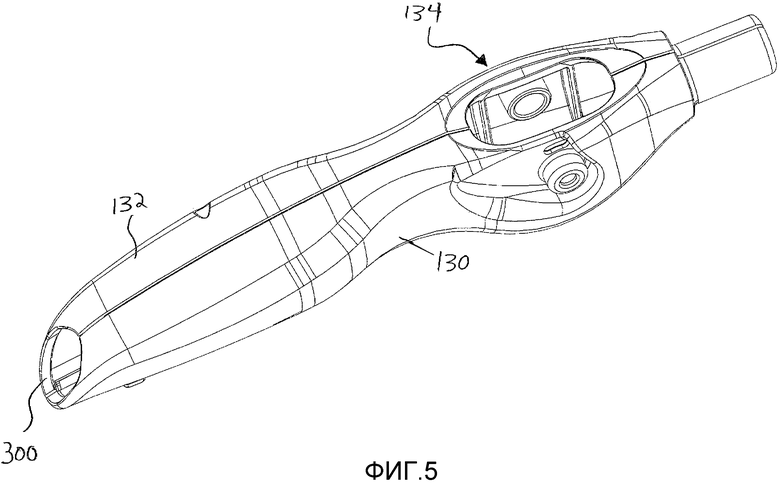

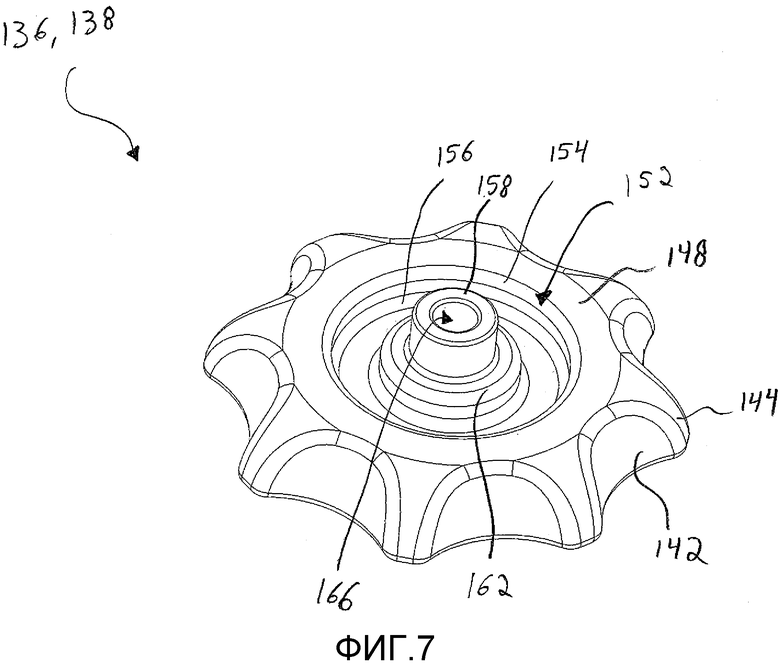
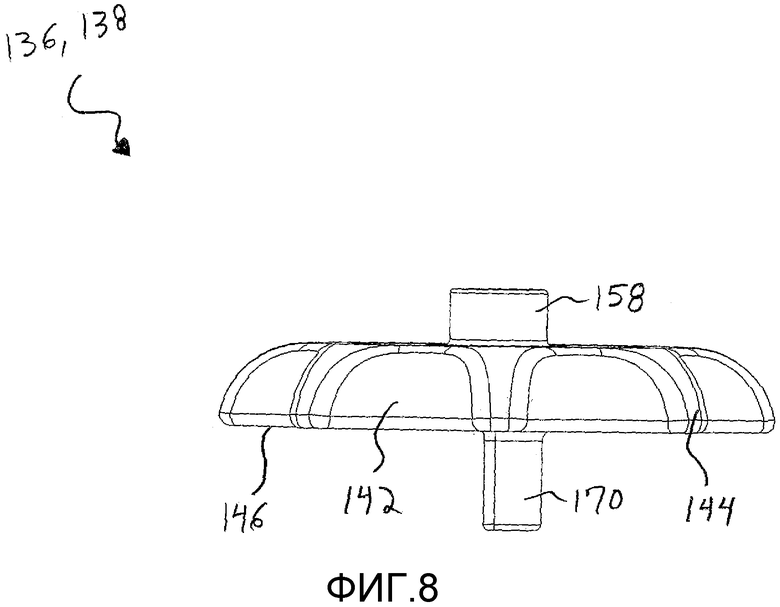
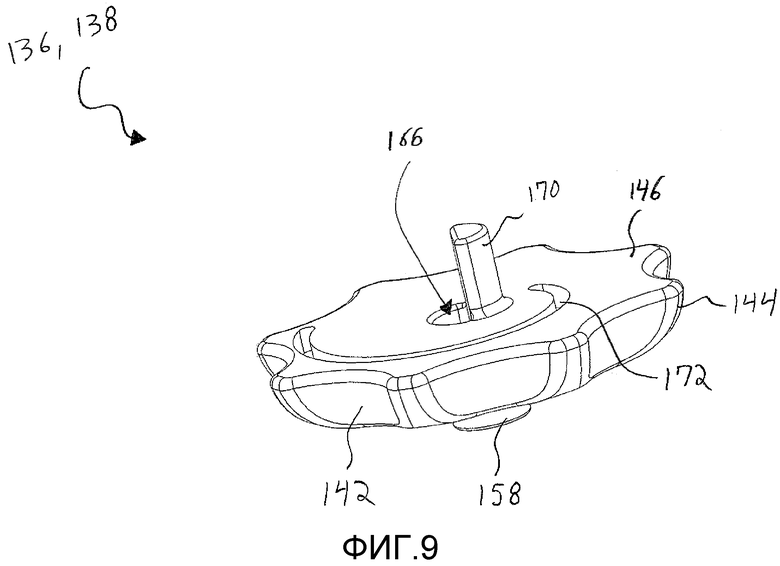
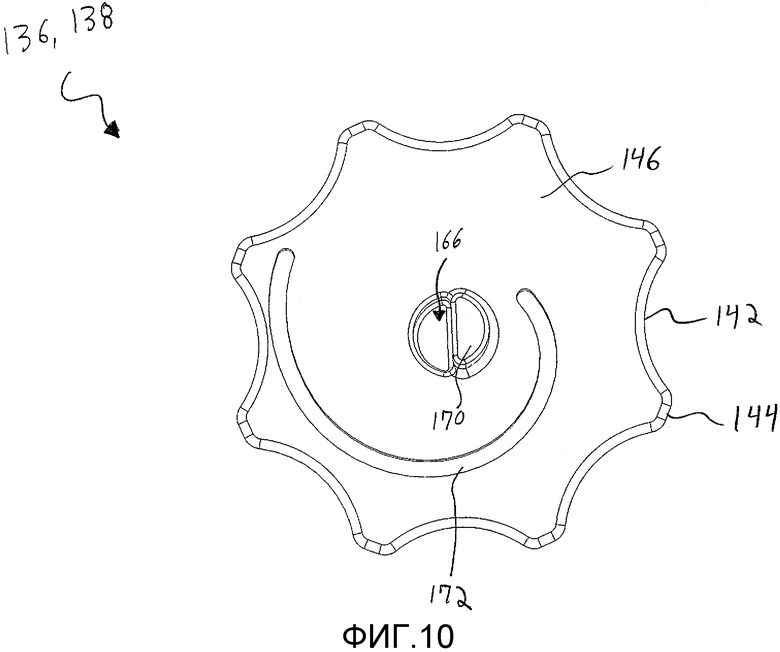

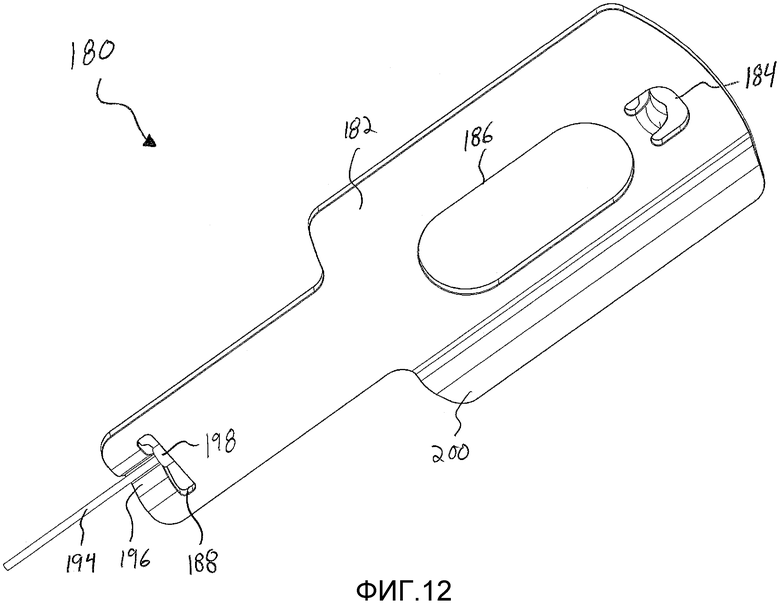

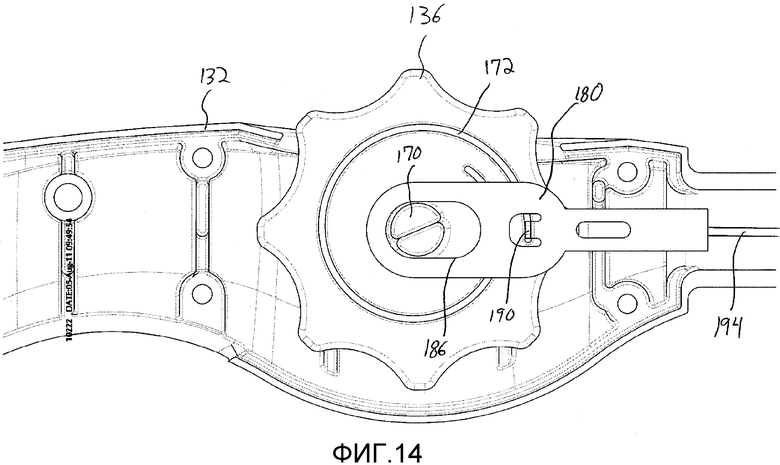
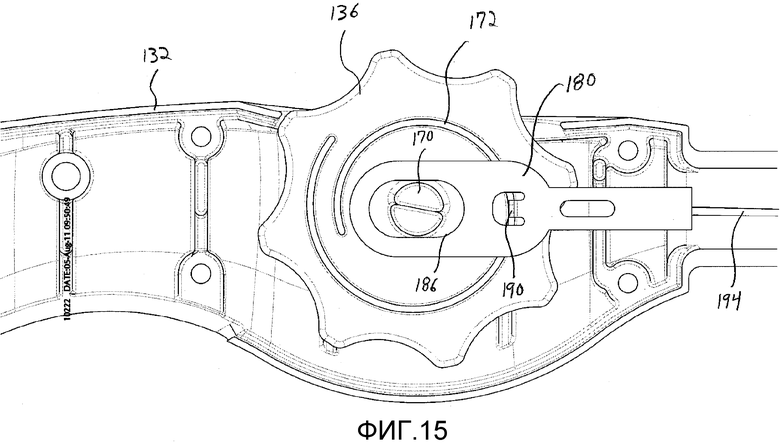

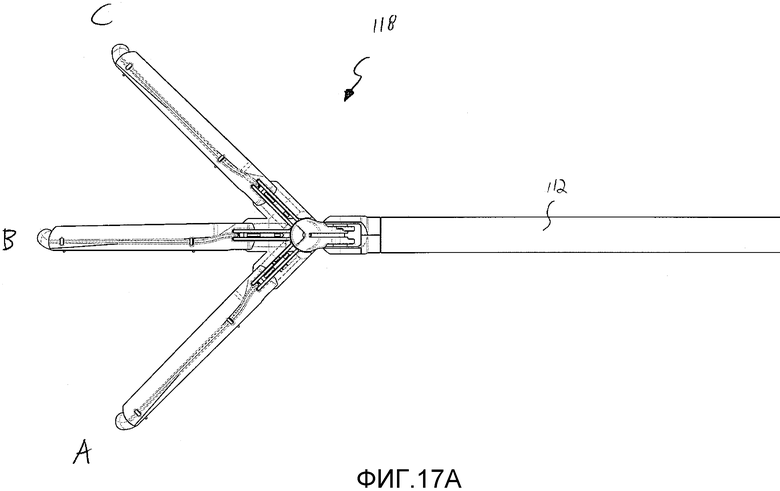
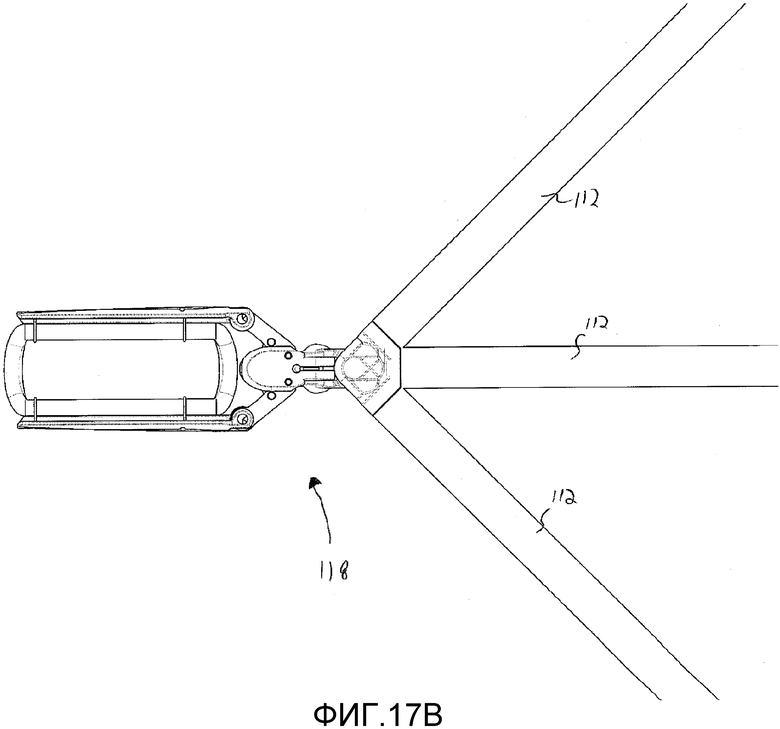
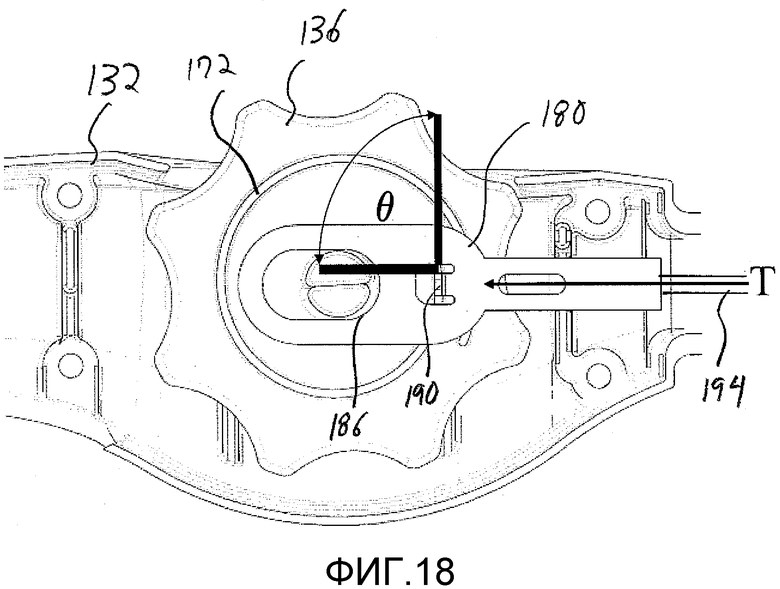
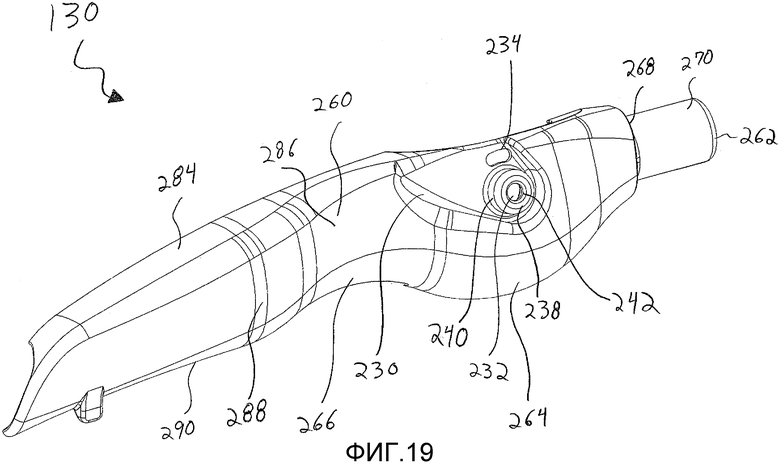

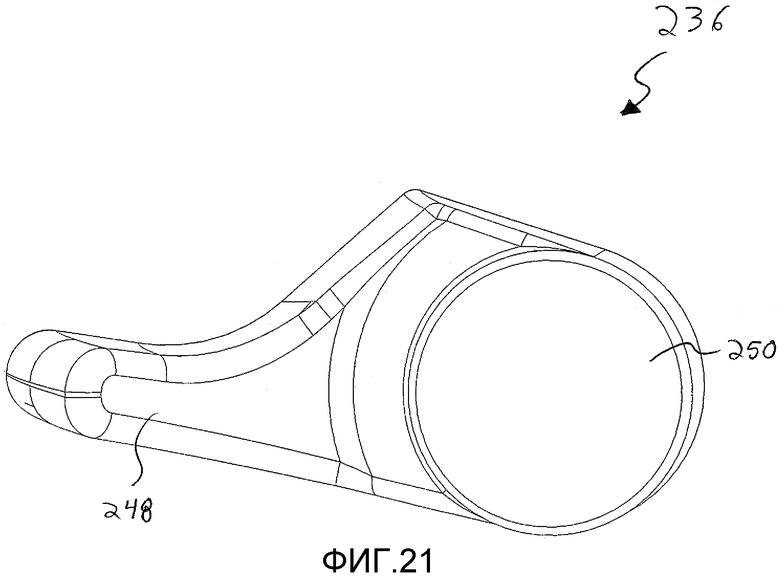

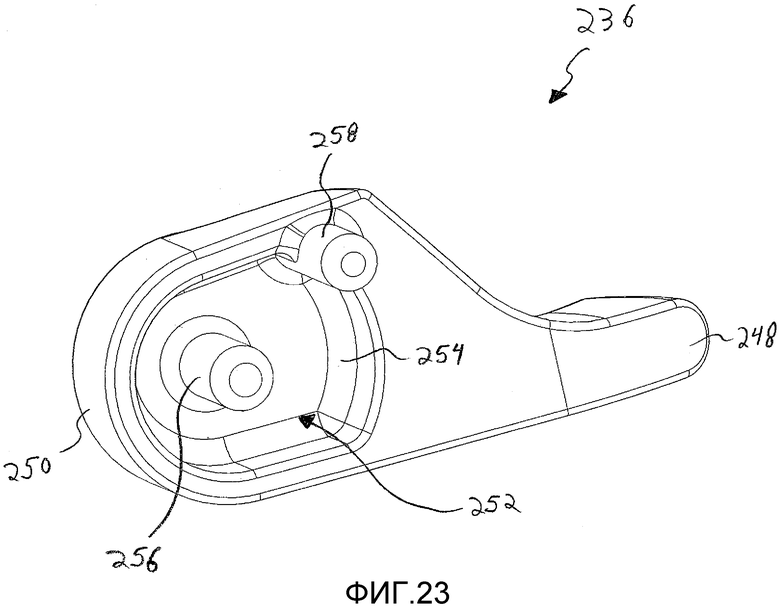
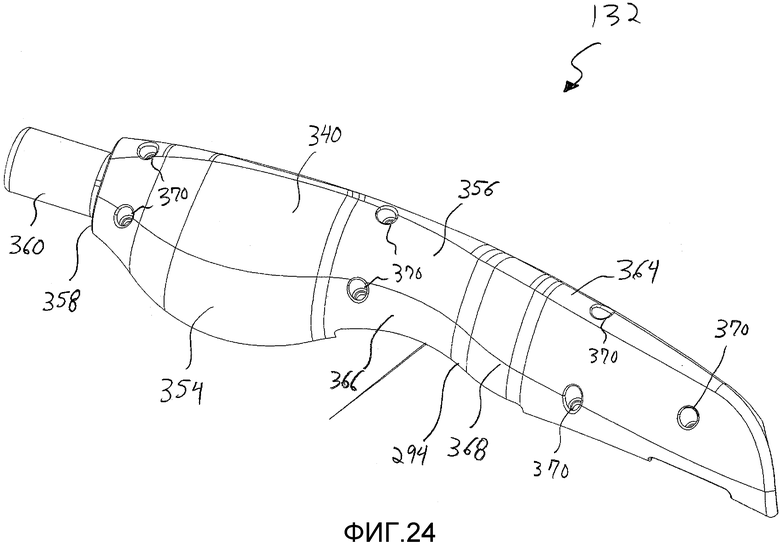
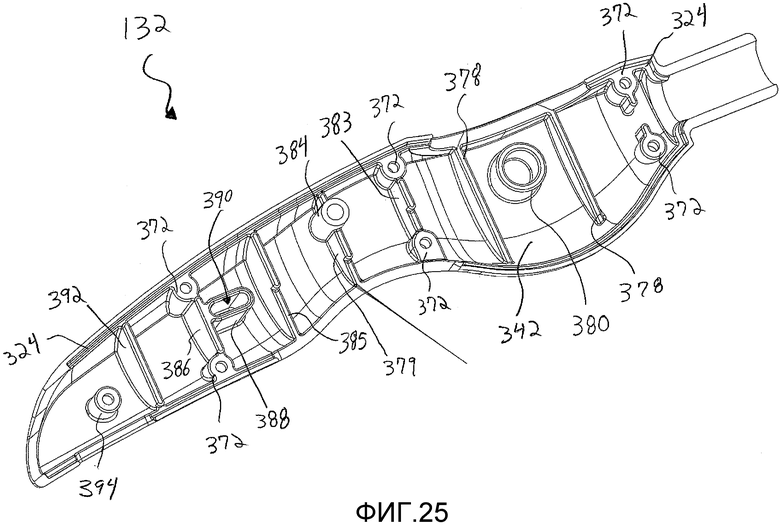
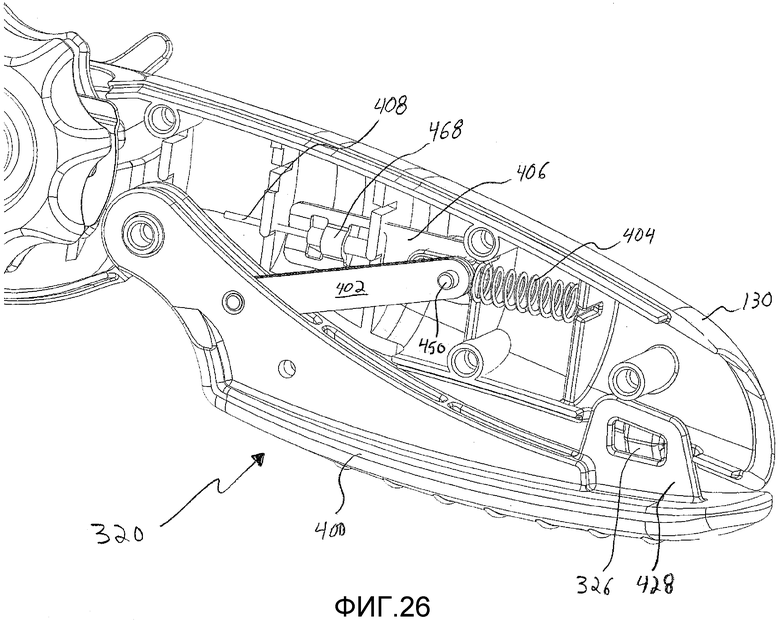
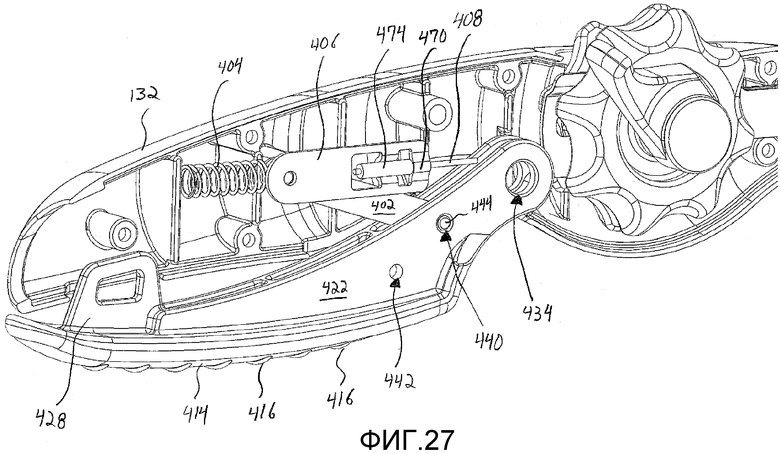
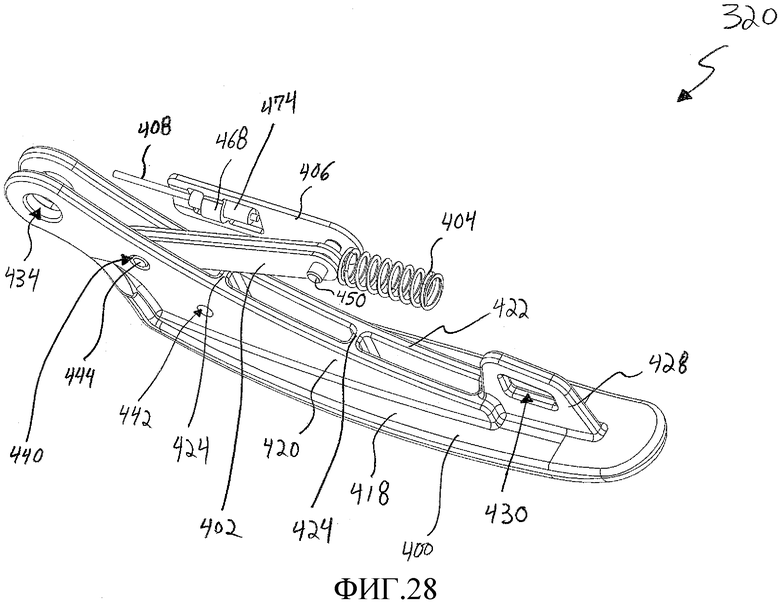
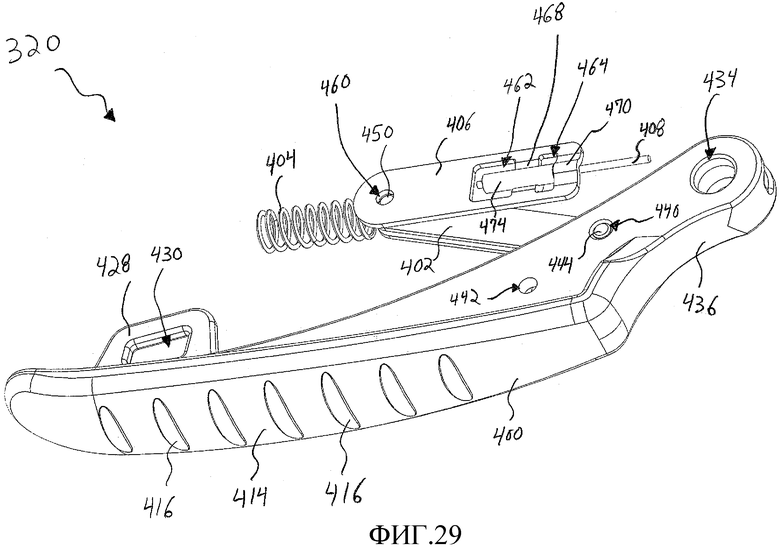
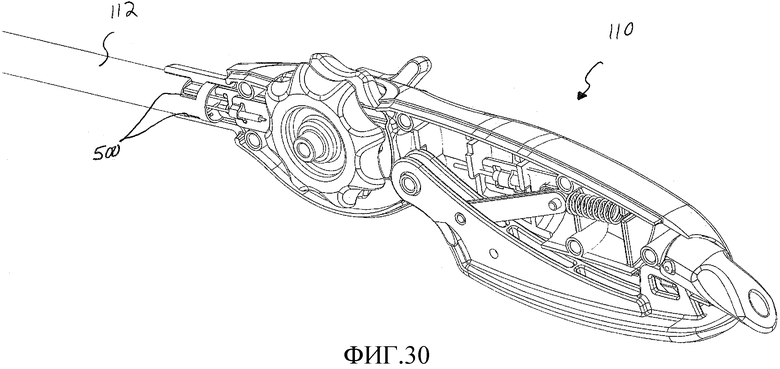

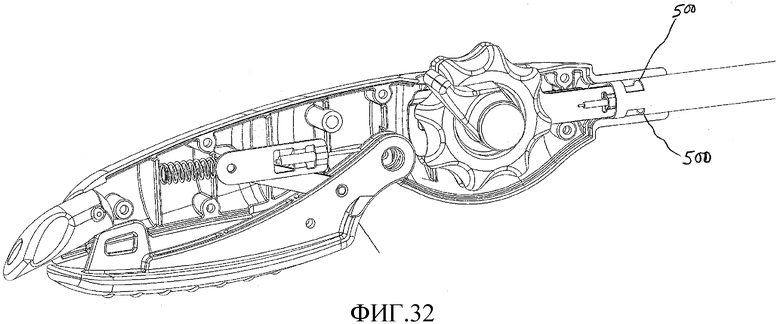
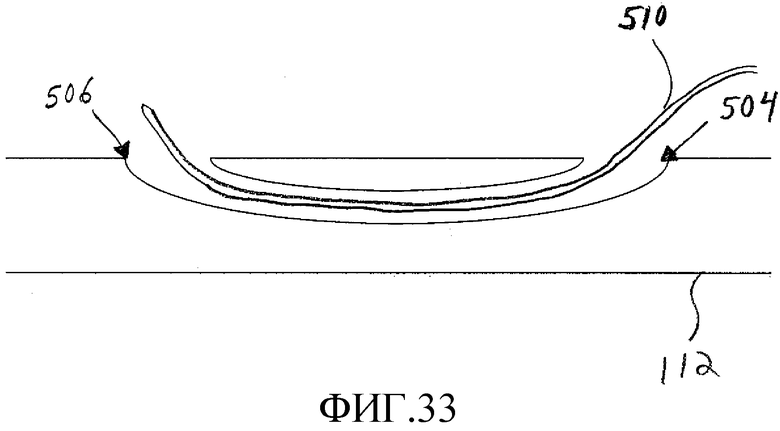
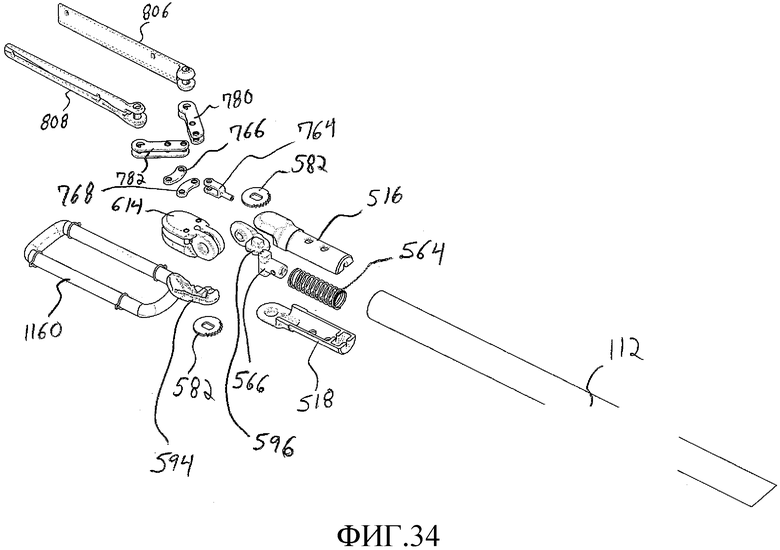
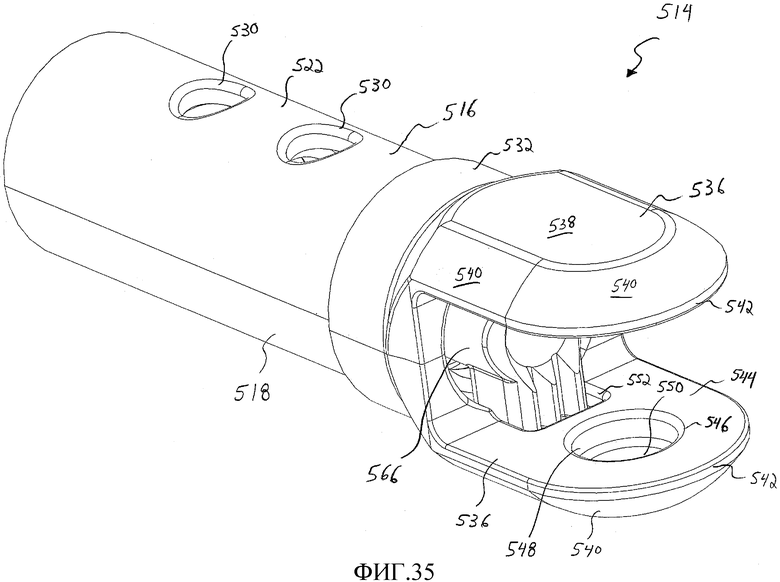
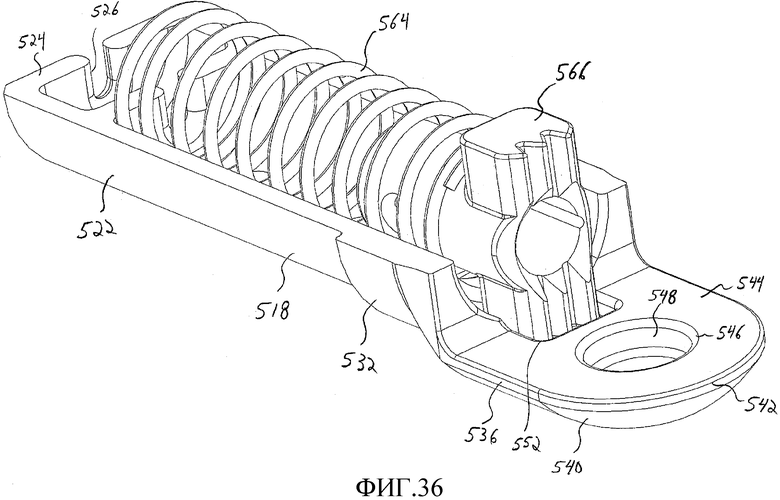
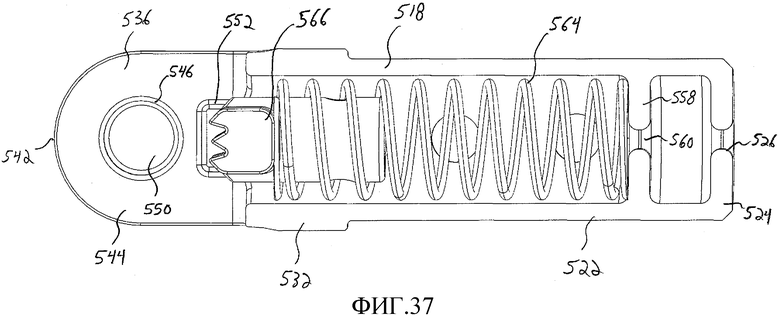
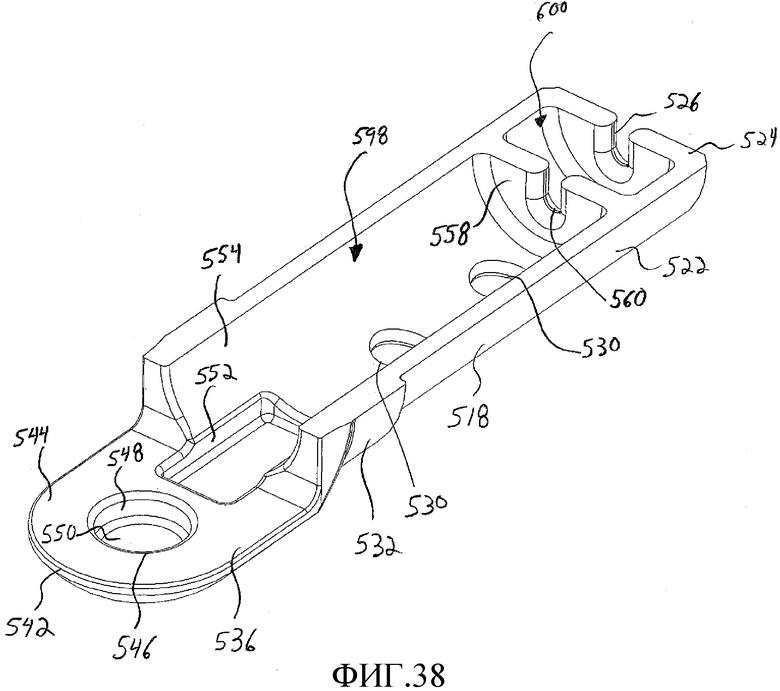
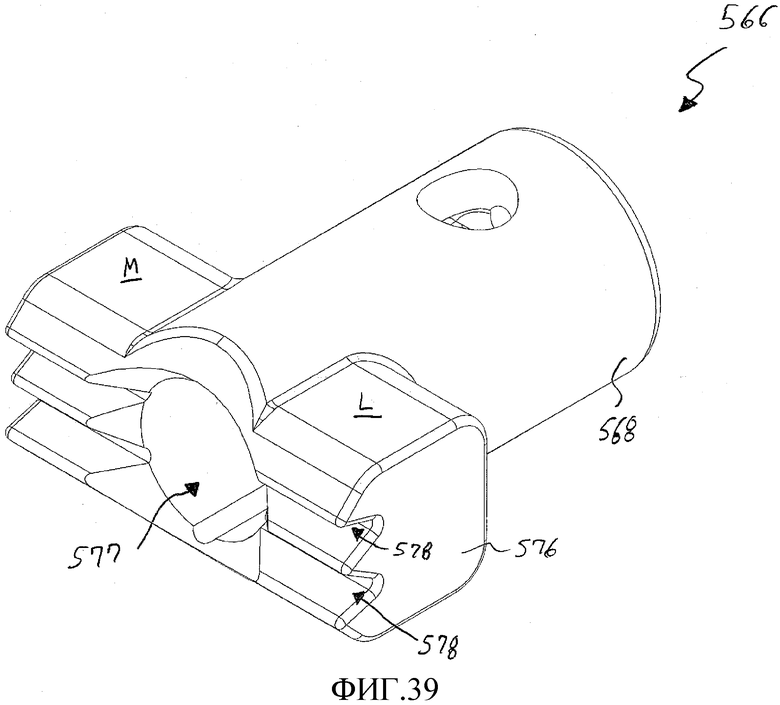
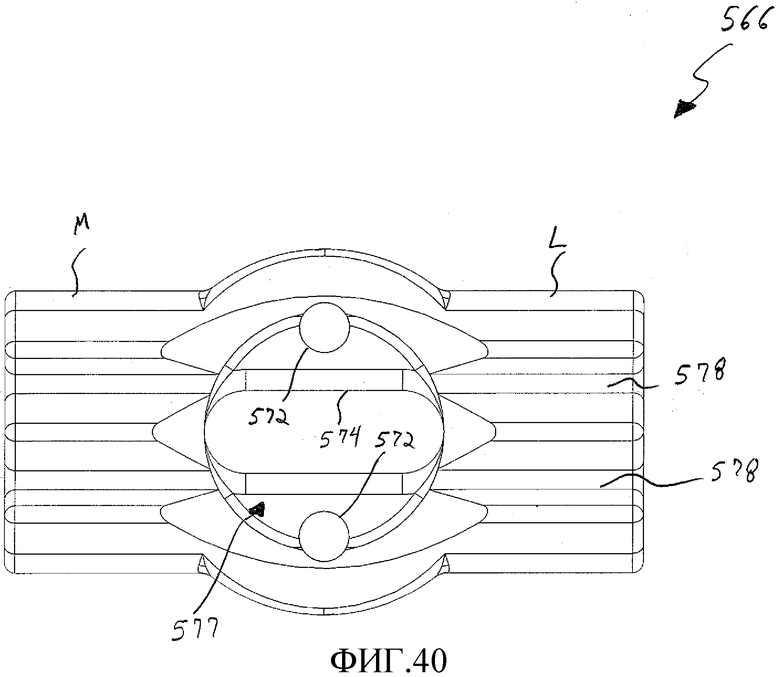
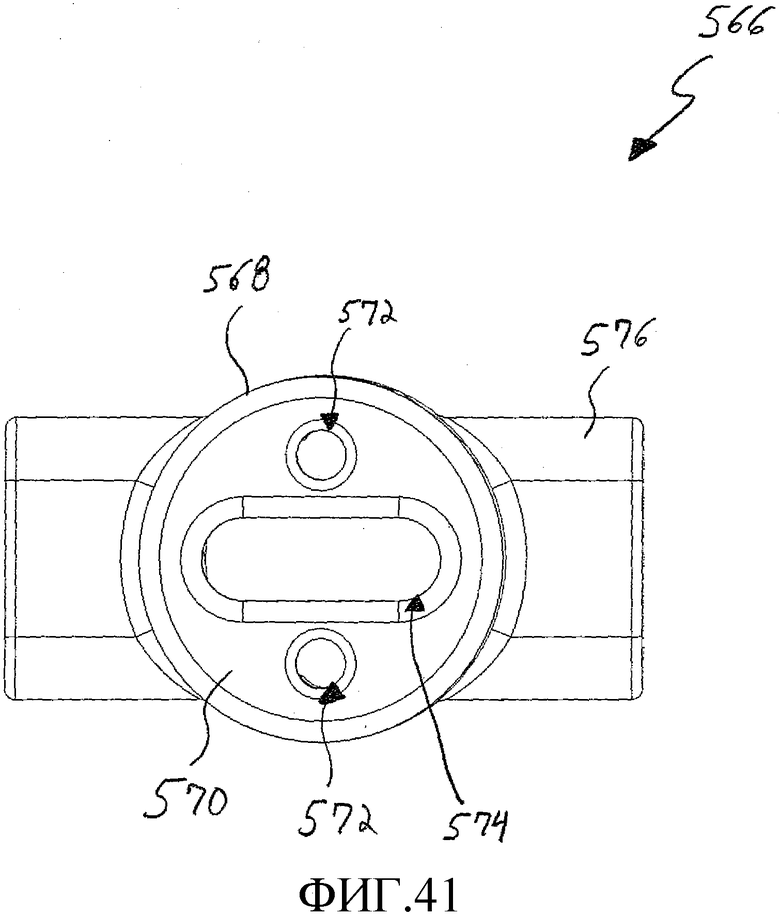
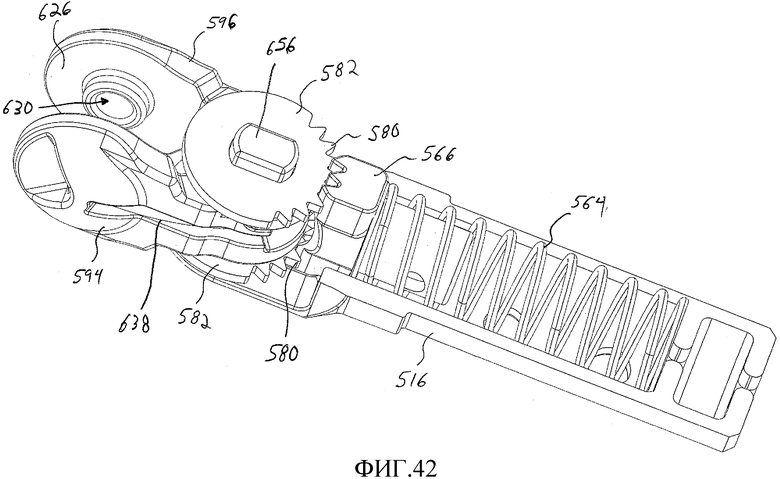
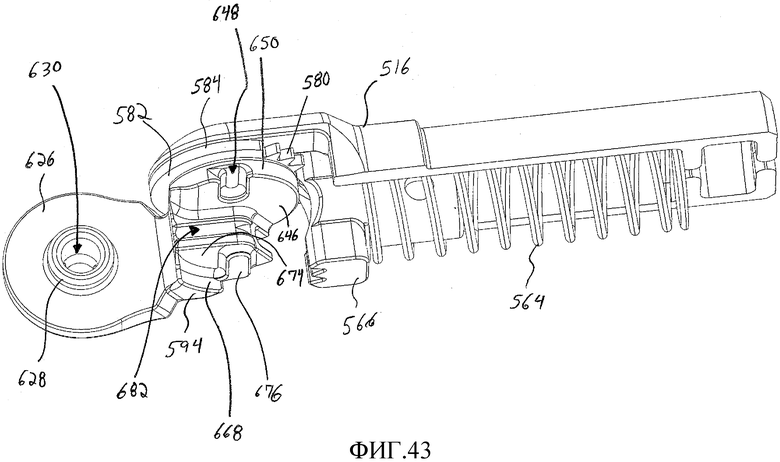
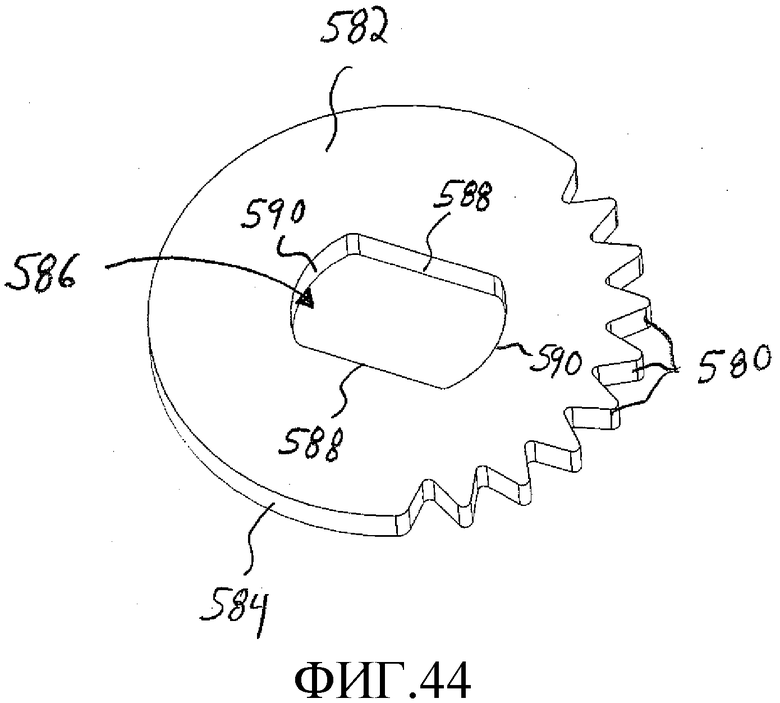
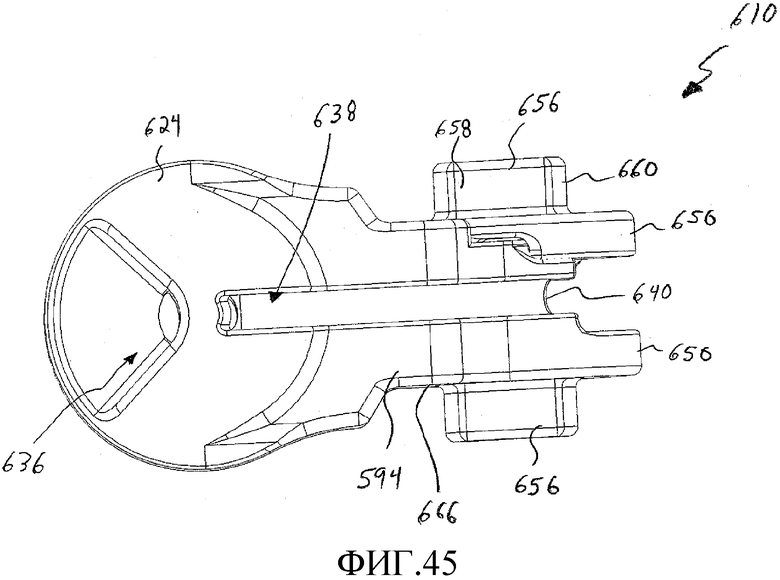
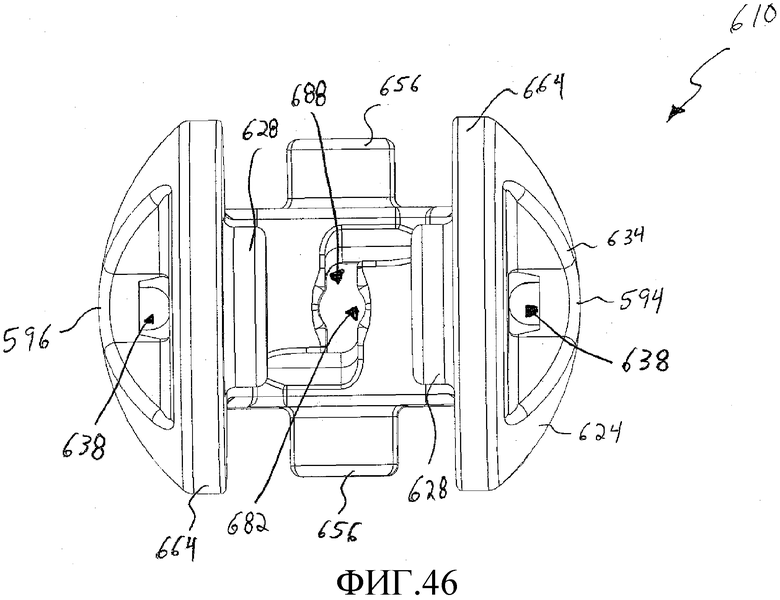
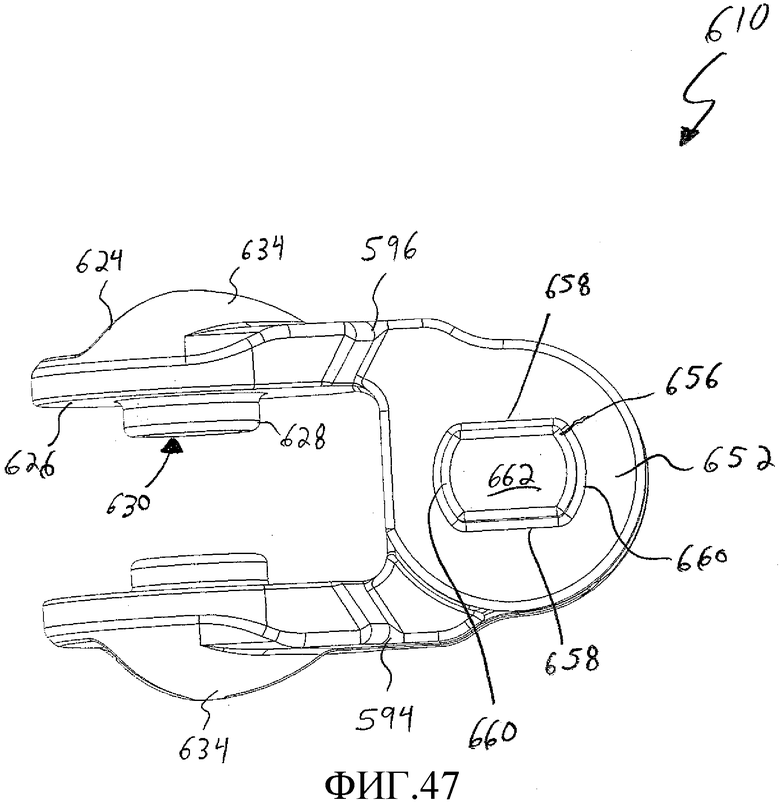
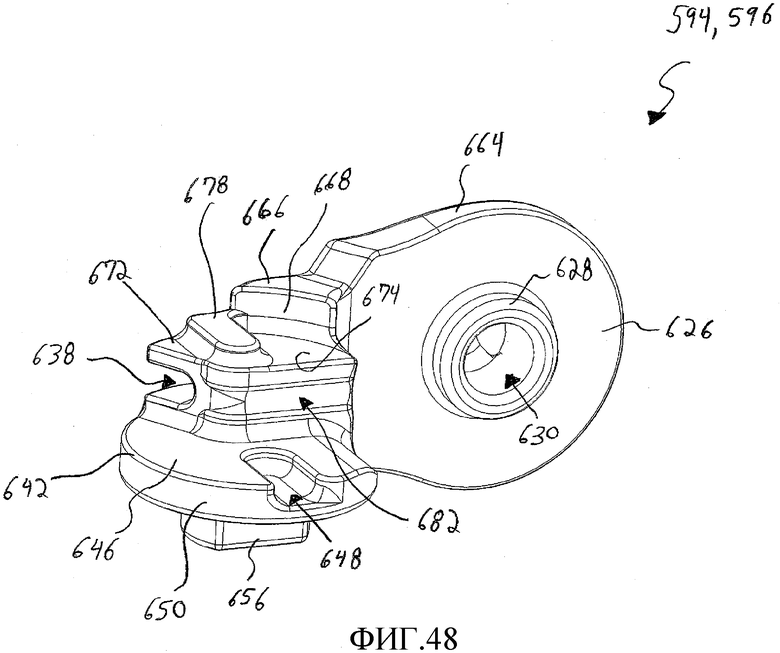
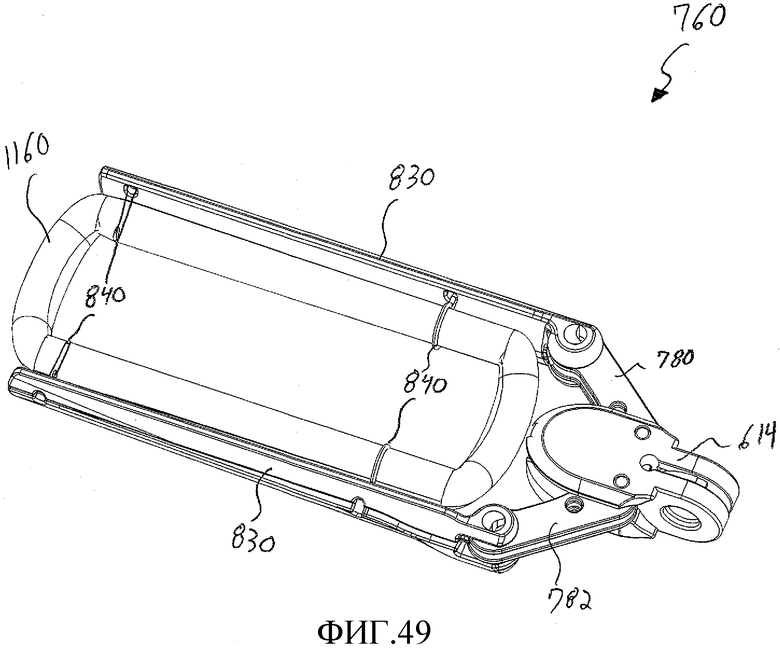
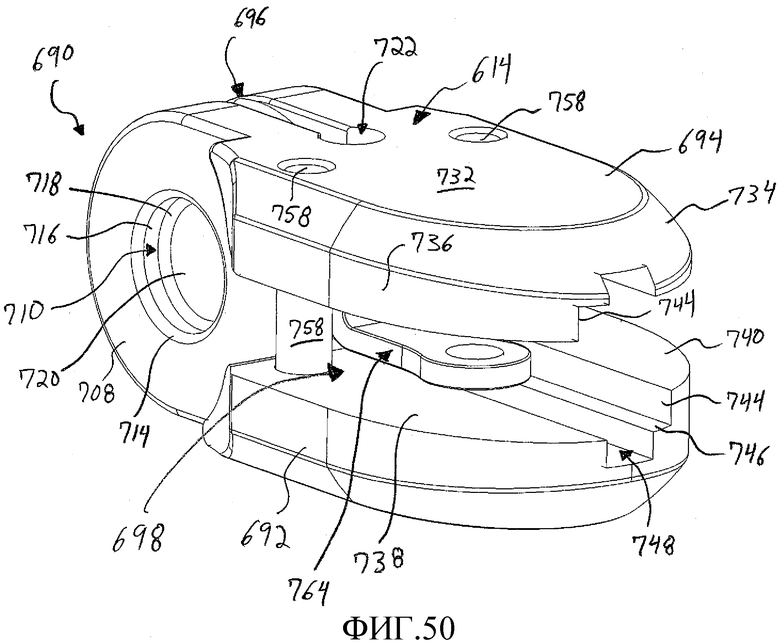
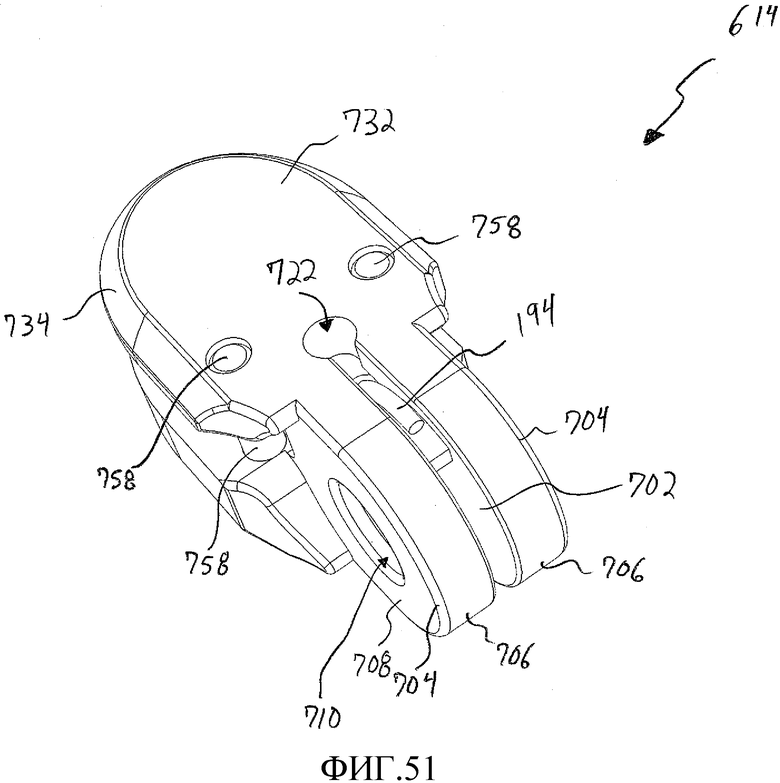
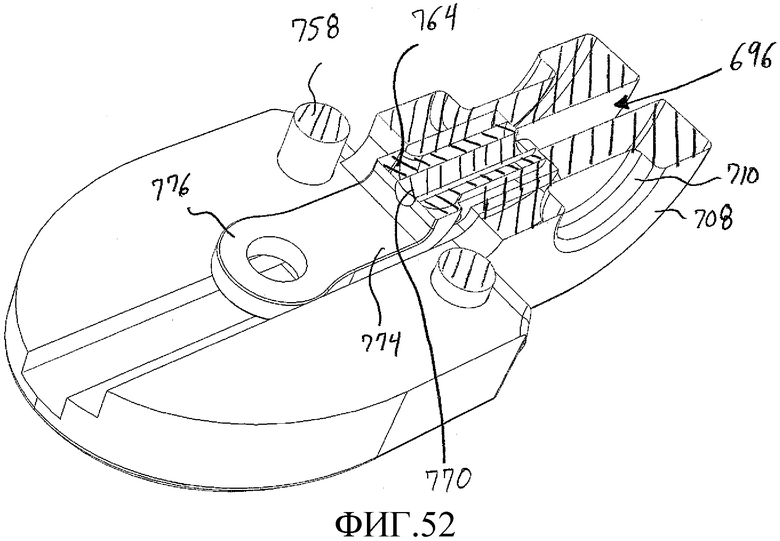
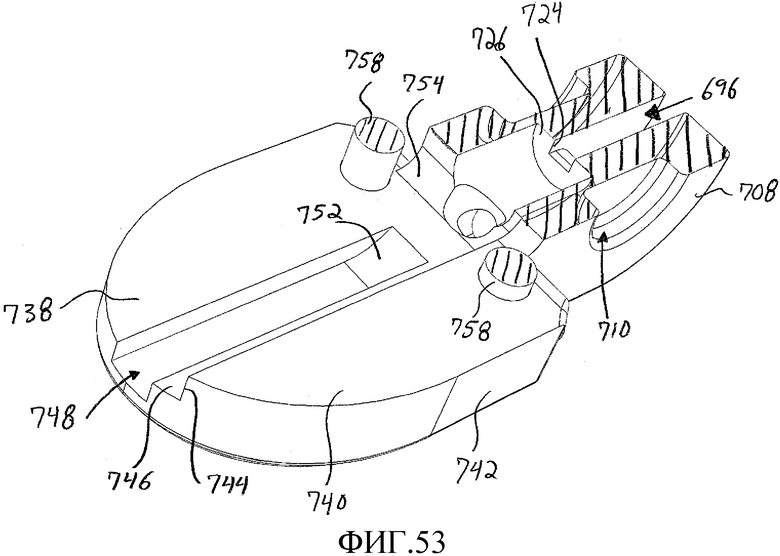
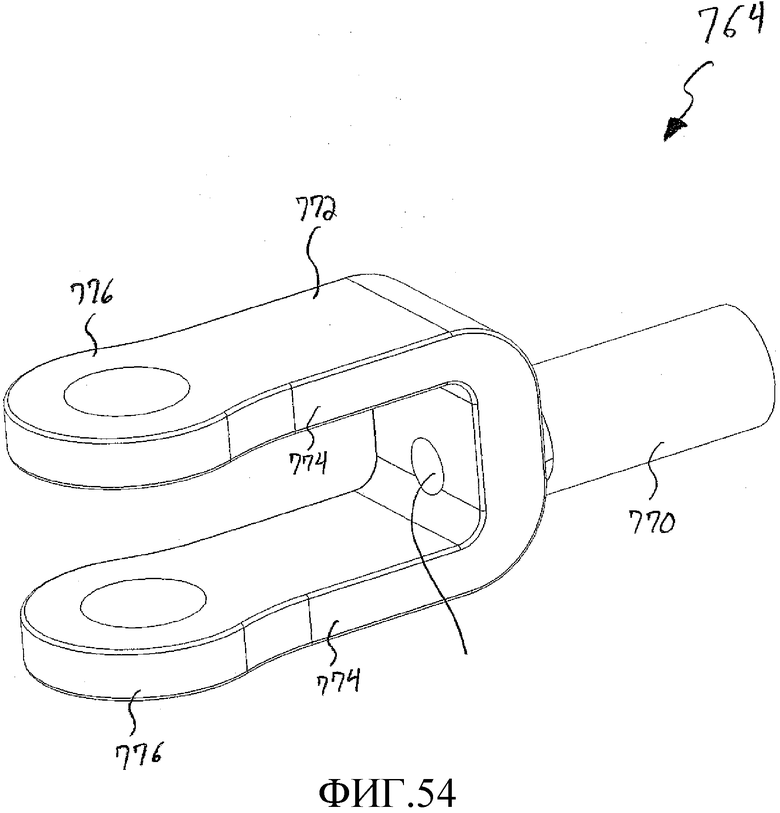
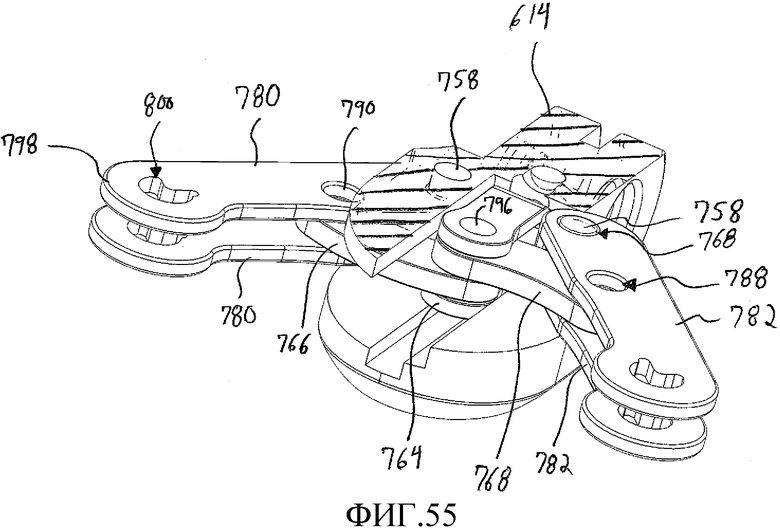


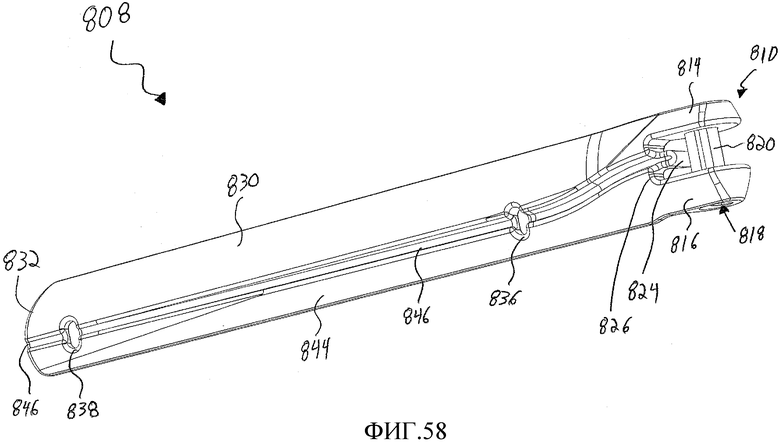
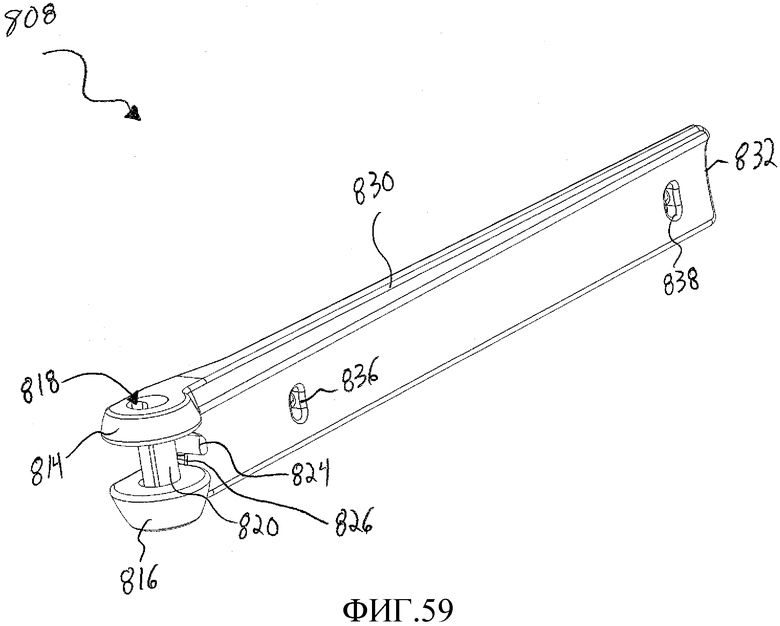
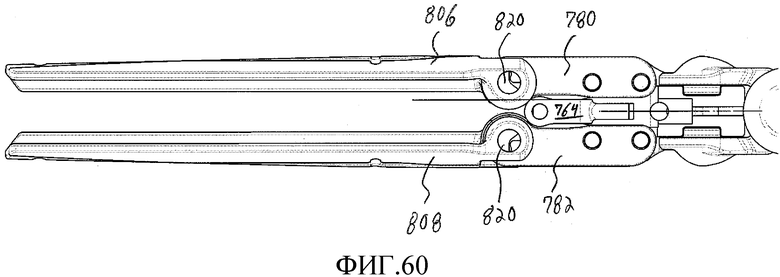

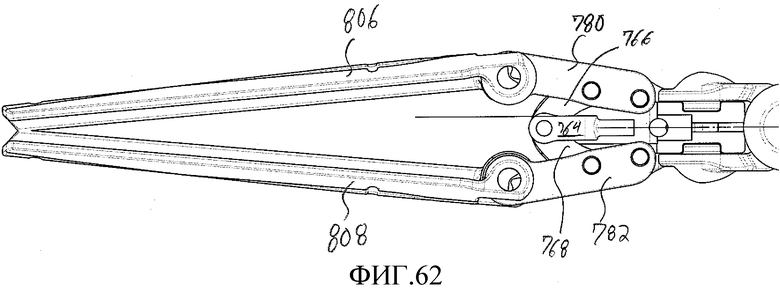
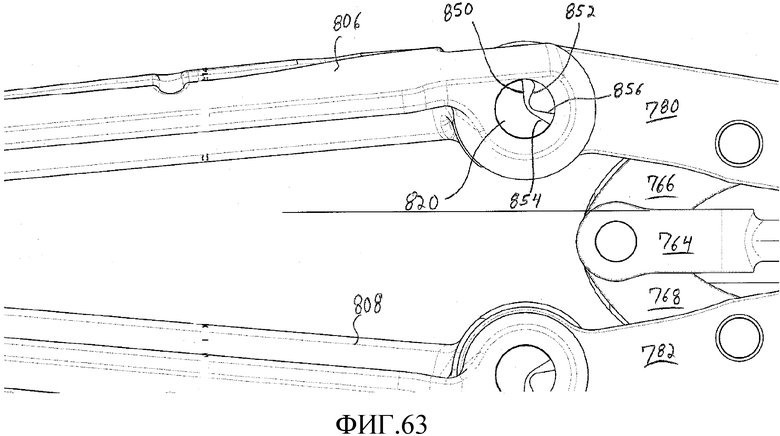
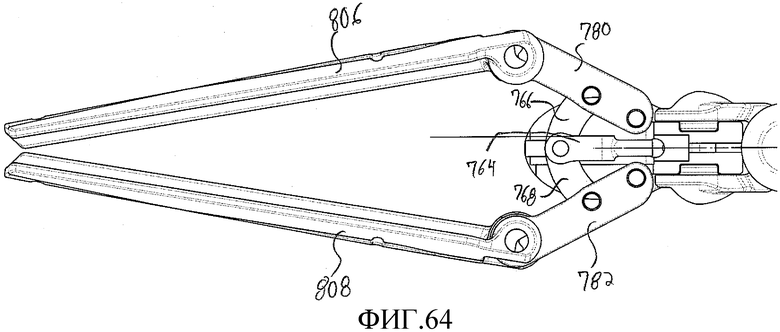
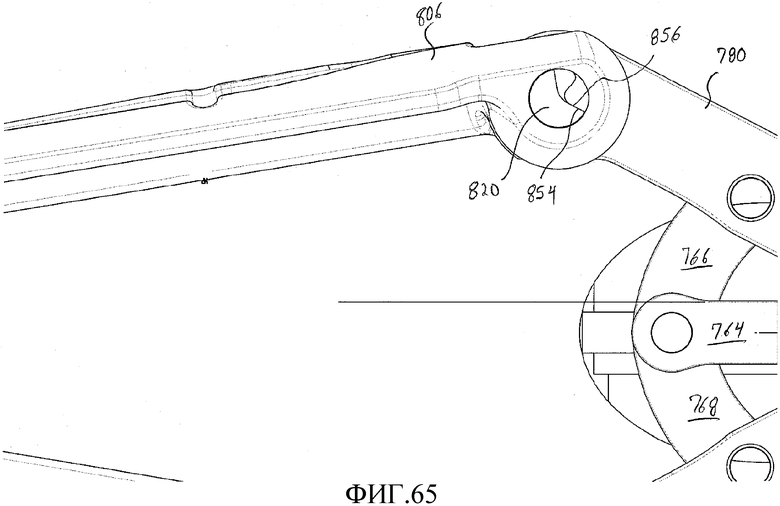
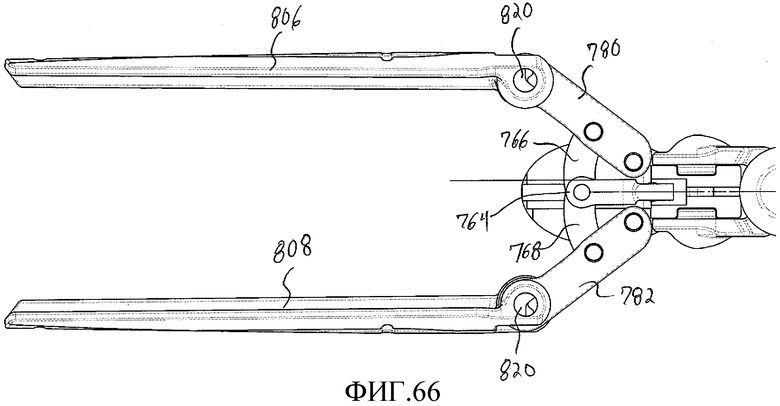
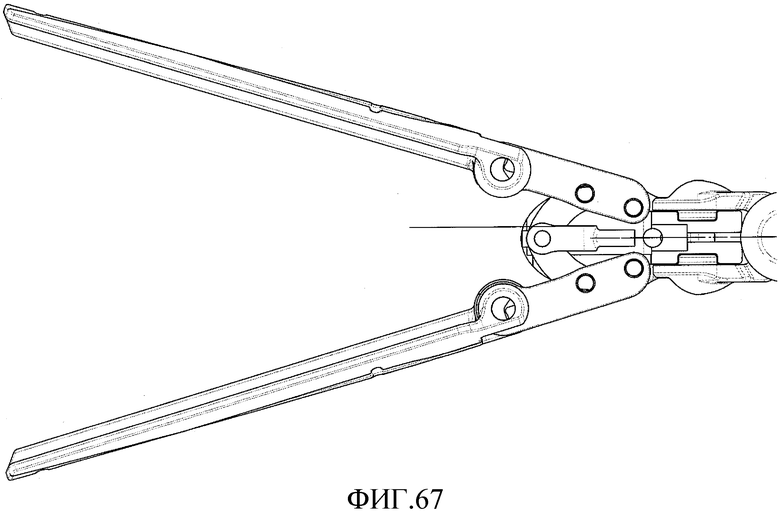
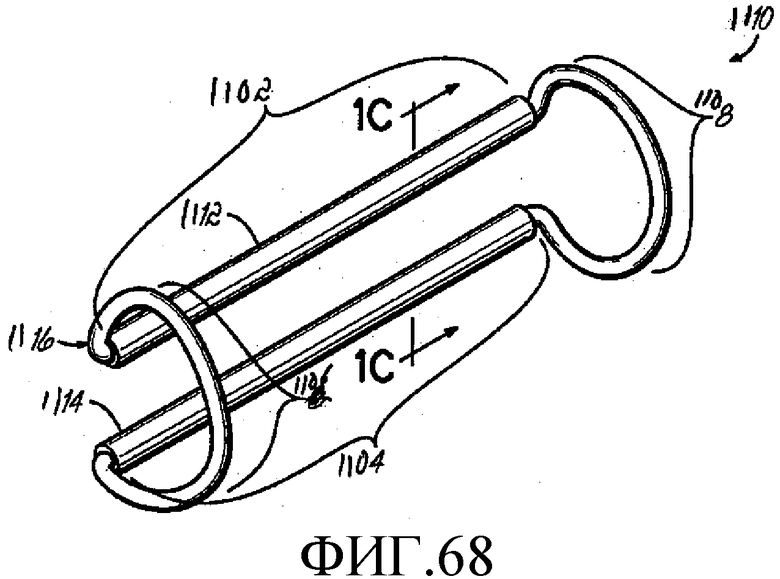

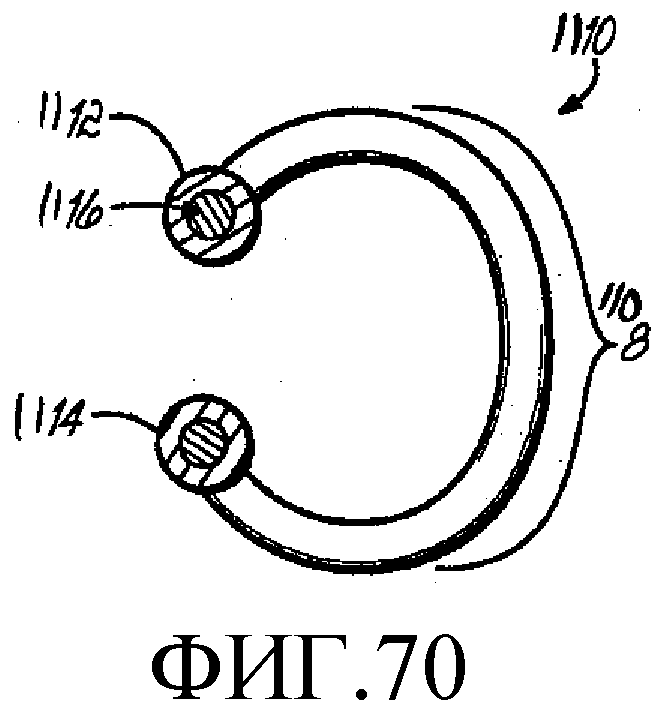
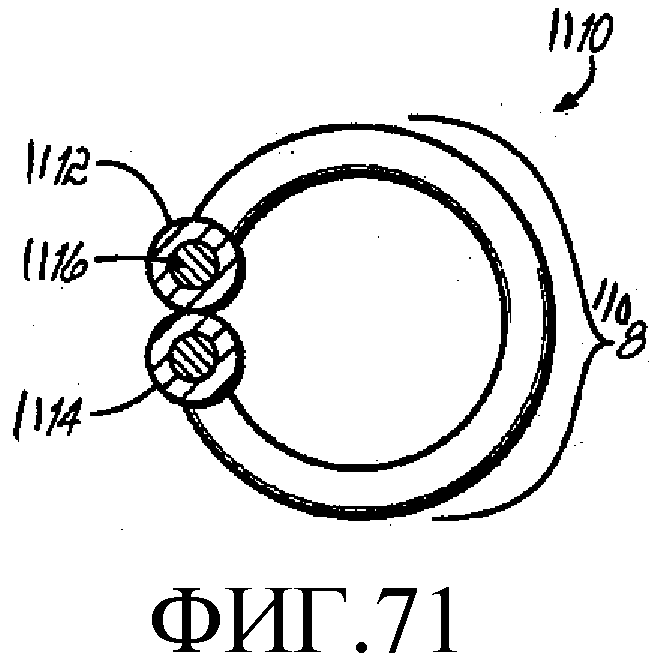
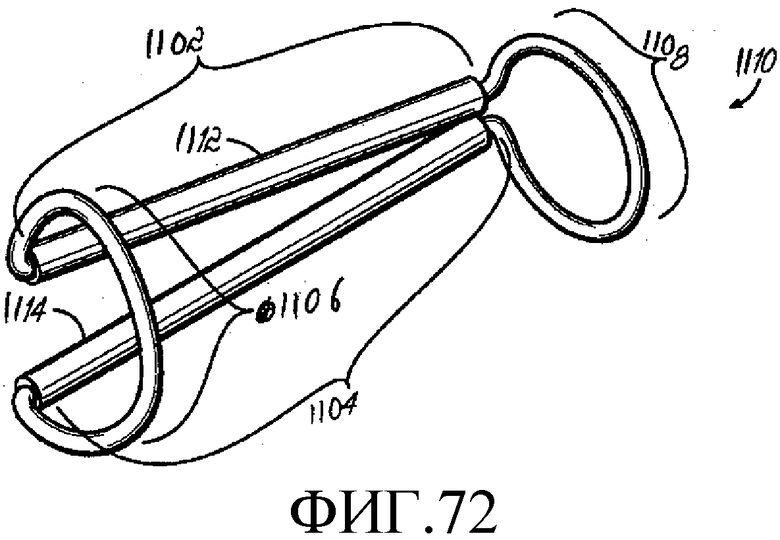
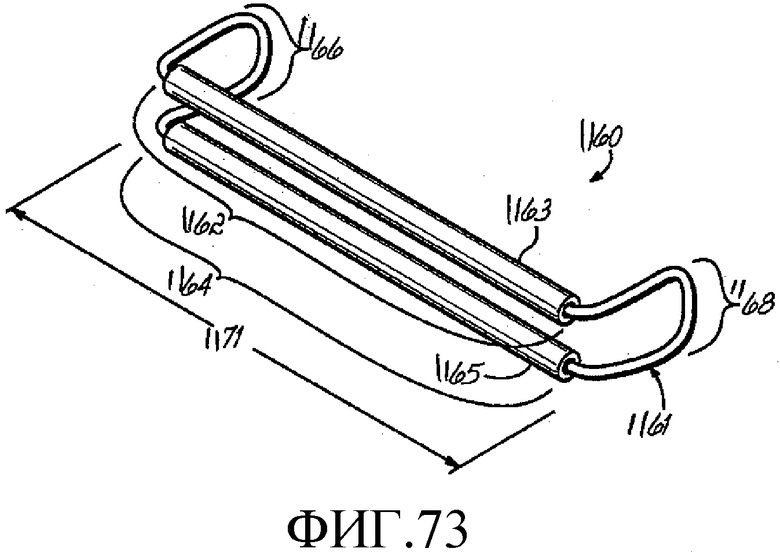
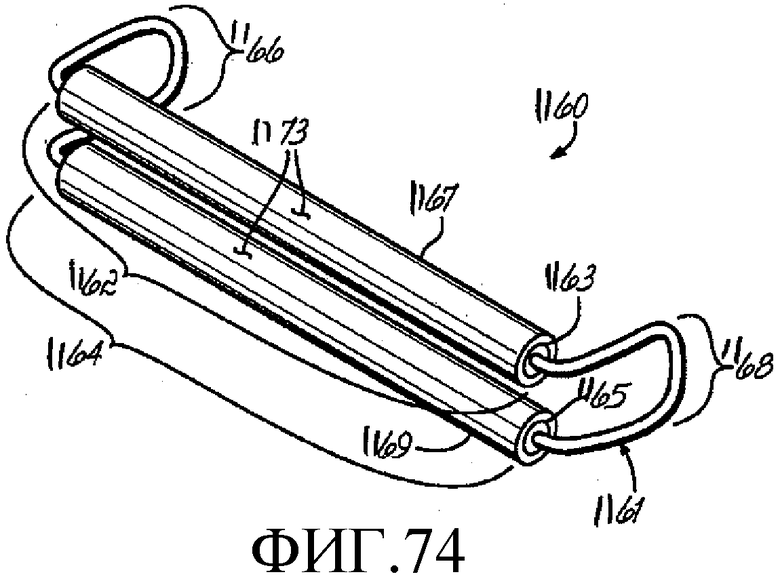
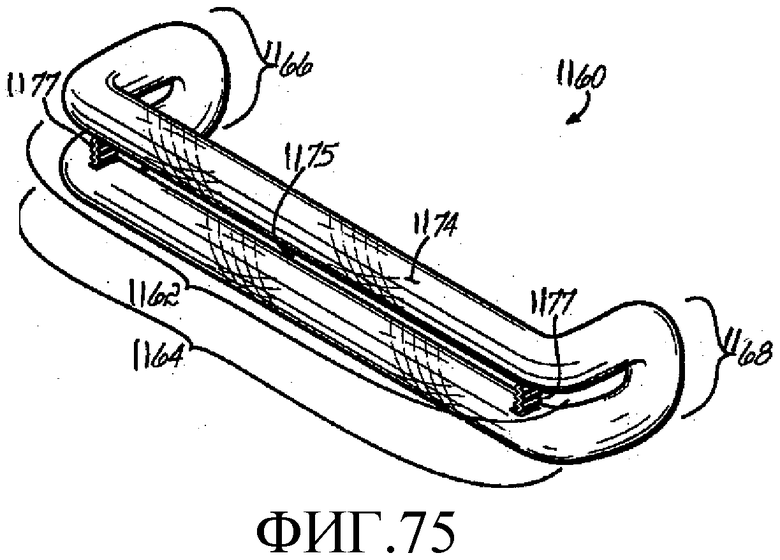
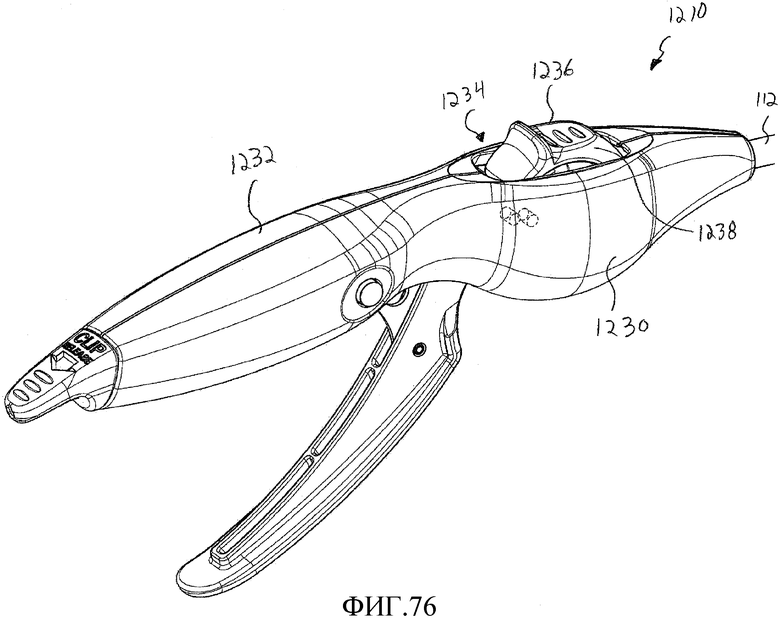
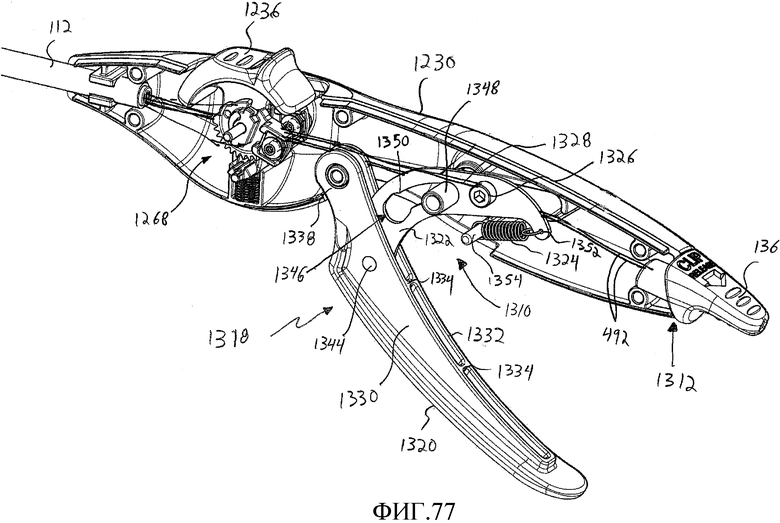
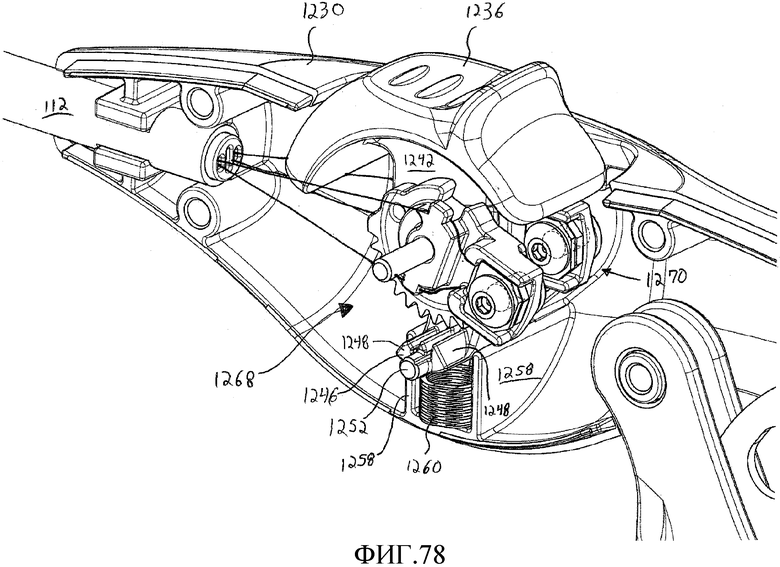
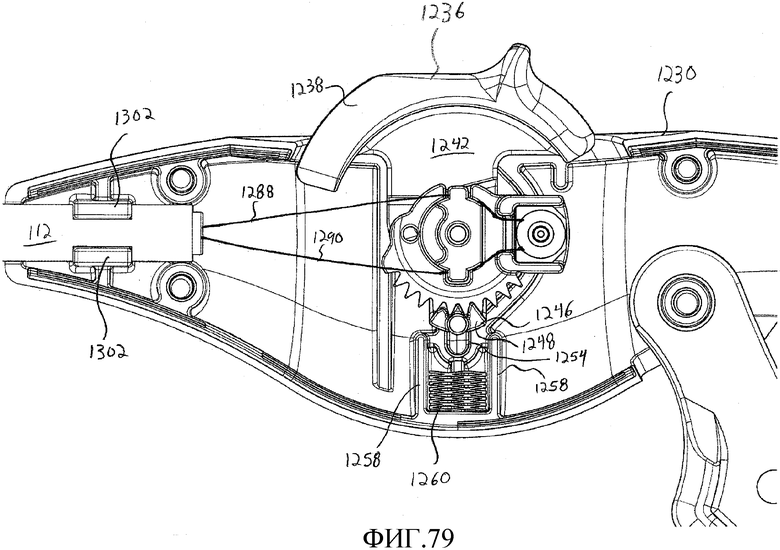
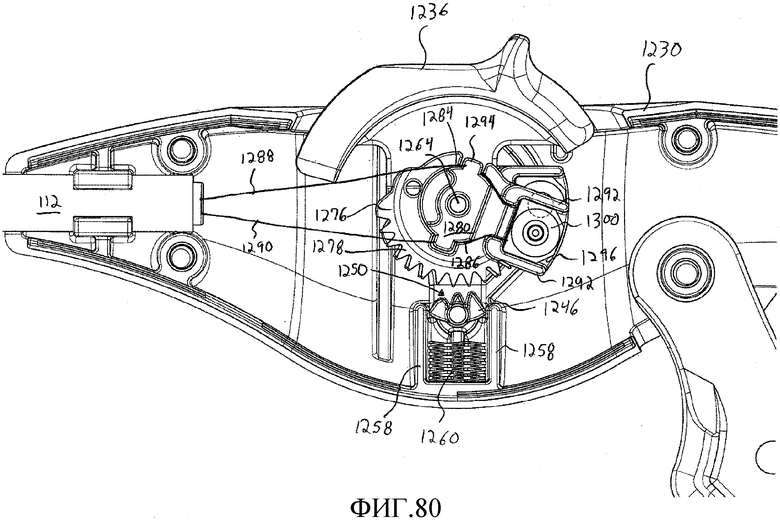

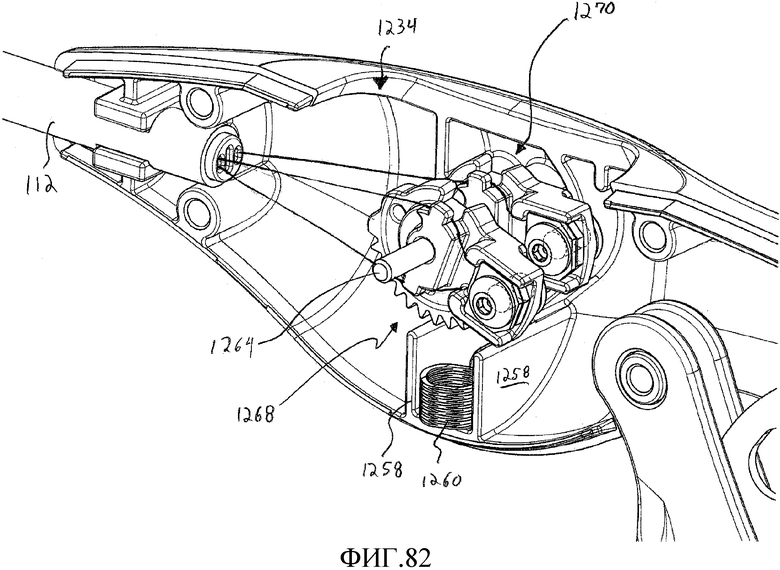
Изобретение относится к медицине. Медицинский инструмент содержит первое сочленение с первым элементом и вторым элементом. Первый элемент сконфигурирован с возможностью изменения положения относительно второго элемента в плоскости X-Y. Второе сочленение имеет рабочее соединение с первым сочленением. Второе сочленение содержит третий элемент и четвертый элемент. Третий элемент сконфигурирован с возможностью изменения положения относительно четвертого элемента в плоскости Y-Z, перпендикулярной плоскости X-Y. Устройство управления имеет рабочее соединение с первым сочленением и вторым сочленением. Устройство управления содержит первый элемент управления, сконфигурированный с возможностью направления изменения положения, по меньшей мере, одного из первого элемента и второго элемента, и второй элемент управления, сконфигурированный с возможностью направления изменения положения, по меньшей мере, одного из третьего элемента и четвертого элемента. Активный и пассивный механизмы изменения положения обеспечивают управление перемещениями в разных направлениях, например углами поворота вокруг поперечной и вертикальной осей. 2 н. и 42 з.п. ф-лы, 82 ил.
1. Медицинский инструмент, содержащий:
первое сочленение, содержащее первый элемент и второй элемент, при этом первый элемент сконфигурирован с возможностью изменения положения относительно второго элемента в плоскости X-Y;
второе сочленение, имеющее рабочее соединение с первым сочленением, причем второе сочленение содержит третий элемент и четвертый элемент, причем третий элемент сконфигурирован с возможностью изменения положения относительно четвертого элемента в плоскости Y-Z, перпендикулярной плоскости X-Y; и,
устройство управления, имеющее рабочее соединение с первым сочленением и вторым сочленением, причем устройство управления содержит первый элемент управления, сконфигурированный с возможностью направления изменения положения, по меньшей мере, одного из первого элемента и второго элемента, и второй элемент управления, сконфигурированный с возможностью направления изменения положения, по меньшей мере, одного из третьего элемента и четвертого элемента;
причем первый элемент управления содержит первый пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение между первым элементом и вторым элементом по всему заданному диапазону множества ориентаций в плоскости X-Y, и вторым положением, которое фиксирует ориентацию первого элемента относительно второго элемента в плоскости X-Y из множества предварительно заданных ориентаций фиксации;
причем второй элемент управления содержит второй пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение между третьим элементом и четвертым элементом по всему предварительно заданному диапазону множества ориентаций в плоскости Y-Z, и вторым положением, которое фиксирует ориентацию третьего элемента относительно четвертого элемента в плоскости Y-Z из множества предварительно заданных ориентаций фиксации.
2. Медицинский инструмент по п. 1, в котором:
первый пассивный элемент управления содержит рычаг, установленный с возможностью изменения положения на корпусе устройства управления, при этом рычаг соединен с тросом пассивного управления; и
трос пассивного управления также соединен с переустанавливаемым захватом, сконфигурированным с возможностью зацепления, по меньшей мере, одного из первого элемента и второго элемента, чтобы сдерживать перемещение первого элемента относительно второго элемента в плоскости X-Y.
3. Медицинский инструмент по п. 2, в котором:
переустанавливаемый захват поджат с помощью пружины, чтобы сдерживать перемещение первого элемента относительно второго элемента в плоскости X-Y; и
рычаг сконфигурирован с возможностью изменения положения для натяжения троса пассивного управления, чтобы преодолевать поджимное усилие пружины для обеспечения возможности перемещения первого элемента относительно второго элемента в плоскости X-Y.
4. Медицинский инструмент по п. 3, дополнительно содержащий продольную трубку, продолжающуюся между устройством управления и первым сочленением, при этом, по меньшей мере, участок пассивного элемента управления продолжается через продольную трубку.
5. Медицинский инструмент по п. 1, дополнительно содержащий продольную трубку, продолжающуюся между устройством управления и первым сочленением, при этом:
первый элемент установлен на устройстве управления; и,
второй элемент установлен с возможностью изменения положения на первом элементе.
6. Медицинский инструмент по п. 5, в котором:
первый элемент является удлиненным и содержит внутреннюю полость, которая, по меньшей мере, частично вмещает переустанавливаемый захват для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y; и
по меньшей мере, что-то одно из первого элемента и продольной трубки вмещает пружину, поджимающую переустанавливаемый захват для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y.
7. Медицинский инструмент по п. 6, в котором:
по меньшей мере, один из первого элемента и второго элемента содержит выступ;
по меньшей мере, один из первого элемента и второго элемента содержит полость, сконфигурированную с возможностью вмещения выступа;
полость, по меньшей мере, частично ограничена опорной поверхностью; и
выступ сконфигурирован с возможностью контакта с опорной поверхностью, когда происходит перемещение первого элемента относительно второго элемента в плоскости X-Y.
8. Медицинский инструмент по п. 7, в котором:
первый элемент содержит полость;
второй элемент содержит выступ;
переустанавливаемый захват содержит по меньшей мере один зуб; и
второй элемент содержит по меньшей мере один зуб, сконфигурированный с возможностью зацепления по меньшей мере одного зуба переустанавливаемого захвата, для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y.
9. Медицинский инструмент по п. 8, в котором:
полость содержит первую полость и вторую полость, разнесенные между собой и обращенные одна к другой;
выступ содержит первый выступ и второй выступ, разнесенные между собой и обращенные один от другого;
первая полость сконфигурирована с возможностью вмещения первого выступа; и
вторая полость сконфигурирована с возможностью вмещения второго выступа.
10. Медицинский инструмент по п. 5, в котором:
первый элемент содержит вилку; и
второй элемент содержит шарнир.
11. Медицинский инструмент по п. 10, в котором:
вилка содержит внутреннюю полость, которая, по меньшей мере, частично вмещает переустанавливаемый захват и поджимную пружину;
переустанавливаемый захват содержит участок первого пассивного элемента управления;
первый пассивный элемент управления содержит также приводной механизм, установленный с возможностью изменения положения на устройстве управления; и
первый пассивный элемент управления дополнительно содержит нить, одновременно соединенную с приводным механизмом и переустанавливаемым захватом.
12. Медицинский инструмент по п. 10, в котором:
шарнир содержит первый полушарнир и второй полушарнир; и
первый полушарнир и второй полушарнир являются идентичными.
13. Медицинский инструмент по п. 1, в котором:
первый пассивный элемент управления содержит приводной механизм, установленный с возможностью изменения положения на корпусе устройства управления, при этом приводной механизм соединен с первым тросом пассивного управления; и
первый трос пассивного управления соединен также с, по меньшей мере, одним из первого элемента и второго элемента для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y.
14. Медицинский инструмент по п. 13, в котором приводной механизм сконфигурирован с возможностью изменения положения для допуска перемещения первого элемента относительно второго элемента в плоскости X-Y.
15. Медицинский инструмент по п. 14, дополнительно содержащий продольную трубку, продолжающуюся между устройством управления и первым сочленением, при этом, по меньшей мере, участок первого троса пассивного управления продолжается через продольную трубку.
16. Медицинский инструмент по п. 1, дополнительно содержащий продольную трубку, продолжающуюся между устройством управления и первым сочленением, при этом:
первый элемент установлен на устройстве управления; и
второй элемент установлен с возможностью изменения положения на первом элементе.
17. Медицинский инструмент по п. 16, в котором:
первый элемент является удлиненным и содержит внутреннюю полость, которая, по меньшей мере, частично вмещает переустанавливаемый захват для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y; и
по меньшей мере, что-то одно из первого элемента и продольной трубки вмещает пружину, поджимающую переустанавливаемый захват для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y.
18. Медицинский инструмент по п. 17, в котором:
по меньшей мере, один из первого элемента и второго элемента содержит выступ;
по меньшей мере, один из первого элемента и второго элемента содержит полость, сконфигурированную с возможностью вмещения выступа;
полость, по меньшей мере, частично ограничена опорной поверхностью; и
выступ сконфигурирован с возможностью контакта с опорной поверхностью, когда происходит перемещение первого элемента относительно второго элемента в плоскости X-Y.
19. Медицинский инструмент по п. 18, в котором:
первый элемент содержит полость;
второй элемент содержит выступ;
переустанавливаемый захват содержит по меньшей мере один зуб; и
второй элемент содержит по меньшей мере один зуб, сконфигурированный с возможностью зацепления по меньшей мере одного зуба переустанавливаемого захвата для сдерживания перемещения первого элемента относительно второго элемента в плоскости X-Y.
20. Медицинский инструмент по п. 19, в котором:
полость содержит первую полость и вторую полость, разнесенные между собой и обращенные одна к другой;
выступ содержит первый выступ и второй выступ, разнесенные между собой и обращенные один от другого;
первая полость сконфигурирована с возможностью вмещения первого выступа; и
вторая полость сконфигурирована с возможностью вмещения второго выступа.
21. Медицинский инструмент по п. 15, в котором:
первый элемент содержит вилку; и
второй элемент содержит шарнир.
22. Медицинский инструмент по п. 21, в котором:
вилка содержит внутреннюю полость, которая, по меньшей мере, частично вмещает переустанавливаемый захват и поджимную пружину;
переустанавливаемый захват содержит участок первого элемента управления;
первый элемент управления содержит также приводной механизм, установленный с возможностью изменения положения на устройстве управления; и
первый элемент управления дополнительно содержит нить, одновременно соединенную с приводным механизмом и переустанавливаемым захватом.
23. Медицинский инструмент по п. 21, в котором:
шарнир содержит первый полушарнир и второй полушарнир; и
первый полушарнир и второй полушарнир являются идентичными.
24. Медицинский инструмент по п. 1, в котором:
второй элемент управления содержит приводной механизм, установленный с возможностью изменения положения на корпусе устройства управления, при этом приводной механизм имеет рабочее соединение с тросом пассивного управления; и
трос пассивного управления соединен с, по меньшей мере, одним из третьего элемента и четвертого элемента, чтобы управлять перемещением третьего элемента относительно четвертого элемента в плоскости Y-Z.
25. Медицинский инструмент по п. 24, в котором:
приводной механизм содержит нажимную кнопку, продолжающуюся сквозь корпус устройства управления, которая сконфигурирована с возможностью зацепления с ловителем;
приводной механизм содержит по меньшей мере один зуб; и
ловитель содержит по меньшей мере один зуб, сконфигурированный с возможностью селективного зацепления с по меньшей мере одним зубом приводного механизма.
26. Медицинский инструмент по п. 1, в котором:
приводной механизм установлен с возможностью изменения положения на корпусе устройства управления, при этом приводной механизм содержит участок первого элемента управления и участок второго элемента управления;
первый пассивный элемент управления содержит первый ловитель, установленный с возможностью изменения положения на корпусе устройства управления, причем первый ловитель имеет рабочее соединение с первым тросом, закрепленным к, по меньшей мере, одному из первого элемента и второго элемента; и
второй пассивный элемент управления содержит второй ловитель, установленный с возможностью изменения положения на корпусе устройства управления, причем второй ловитель имеет рабочее соединение со вторым тросом, закрепленным к, по меньшей мере, одному из третьего элемента и четвертого элемента.
27. Медицинский инструмент по п. 26, в котором:
приводной механизм содержит нажимную кнопку, которая поджата пружиной, при этом приводной механизм сконфигурирован с возможностью изменения положения между первым положением и вторым положением, причем первое положение допускает свободное перемещение первого элемента относительно второго элемента в плоскости X-Y и допускает свободное перемещение третьего элемента относительно четвертого элемента в плоскости Y-Z, причем второе положение сдерживает свободное перемещение первого элемента относительно второго элемента в плоскости X-Y и сдерживает свободное перемещение третьего элемента относительно четвертого элемента в плоскости Y-Z;
приводной механизм является фиксируемым в первом положении;
приводной механизм не входит в зацепление с первым ловителем или вторым ловителем в первом положении; и
приводной механизм входит в зацепление с первым ловителем и вторым ловителем во втором положении.
28. Медицинский инструмент по п. 26, в котором;
приводной механизм содержит нажимную кнопку, которая поджата пружиной в зацепление с первым ловителем и вторым ловителем;
первый и второй ловители допускают поворотное изменение положения на общей втулке, продолжающейся внутри устройства управления, когда не зацеплены нажимной кнопкой; и
первый и второй ловители не допускают поворотное изменение положения на общей втулке, когда зацеплены нажимной кнопкой.
29. Медицинский инструмент по п. 1, дополнительно содержащий концевой эффектор, имеющий рабочее соединение с первым и вторым сочленениями.
30. Медицинский инструмент по п. 29, в котором концевой эффектор содержит, по меньшей мере, что-то одно из хирургического диссектора, абляционного наконечника, окклюзирующего зажима, аппликатора окклюзирующего зажима, хирургических щипцов, хирургических браншей, линейного режущего устройства, зажима для абляции и абляционного направляющего электрода.
31. Медицинский инструмент по п. 29, в котором устройство управления содержит третий элемент управления, имеющий рабочее соединение с концевым эффектором.
32. Медицинский инструмент по п. 31, в котором:
концевой эффектор содержит устройство установки зажима; и
третий элемент управления содержит тягу, которая продолжается от устройства управления к концевому эффектору, для управления изменением положения, по меньшей мере, участка устройства установки зажима.
33. Медицинский инструмент по п. 32, в котором:
устройство установки зажима содержит противоположные бранши, разъемно соединенные с окклюзирующим зажимом; и
тяга сконфигурирована с возможностью изменения положения для вывода окклюзирующего зажима из соединения с противоположными браншами.
34. Медицинский инструмент по п. 33, в котором:
противоположные бранши содержат, каждая, небольшое отверстие, через которое продолжается нить;
нити соединены с окклюзирующим зажимом; и
тяга разъемно соединена с нитями.
35. Медицинский инструмент по п. 34, в котором:
нить содержит нитяную петлю; и
тяга расположена между нитяной петлей и окклюзирующим зажимом.
36. Медицинский инструмент по п. 32, в котором:
второе сочленение содержит паз, по которому предусмотрен проход натяжного звена;
при этом натяжное звено имеет рабочее соединение с третьим элементом управления и устройством установки зажима; и
причем устройство установки зажима содержит по меньшей мере два соединительных зажима, имеющих рабочее соединение с натяжным звеном, причем каждый из по меньшей мере двух соединительных зажимов имеет некруглый кулачок, который двигается по криволинейной поверхности, по меньшей мере, одной из двух браншей, причем по меньшей мере два соединительных зажима сконфигурированы с возможностью поворота относительно двух браншей, пока взаимодействие между кулачком и криволинейной поверхностью не блокирует дальнейшей поворот.
37. Медицинский инструмент, содержащий:
устройство управления, по меньшей мере, частично вмещающее множество элементов управления;
удлиненную трубку, осуществляющую рабочее соединение устройства управления с первым сочленением и вторым сочленением;
первое сочленение, содержащее первый элемент и второй элемент, при этом первый элемент сконфигурирован с возможностью изменения положения относительно второго элемента в плоскости X-Y;
второе сочленение, имеющее рабочее соединение с первым сочленением, причем второе сочленение содержит третий элемент и четвертый элемент, причем третий элемент сконфигурирован с возможностью изменения положения относительно четвертого элемента в плоскости Y-Z, перпендикулярной плоскости X-Y; и
концевой эффектор, имеющий рабочее соединение с первым и вторым сочленениями;
причем множество элементов управления содержит первый пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение между первым элементом и вторым элементом по всему предварительно заданному диапазону множества ориентаций в плоскости X-Y, и вторым положением, которое фиксирует ориентацию первого элемента относительно второго элемента в плоскости X-Y из множества предварительно заданных ориентаций фиксации, второй элемент управления, имеющий рабочее соединение со вторым сочленением, для управления перемещением третьего элемента относительно четвертого элемента в плоскости Y-Z, третий элемент управления, имеющий рабочее соединение с концевым эффектором, для управления перемещением, по меньшей мере, участка концевого эффектора.
38. Медицинский инструмент по п. 37, дополнительно содержащий окклюзирующий зажим, установленный с возможностью снятия на концевом эффекторе, при этом множество элементов управления содержит четвертый элемент управления для снятия окклюзирующего зажима с концевого эффектора.
39. Медицинский инструмент по п. 37, в котором:
второй элемент управления содержит активный элемент управления, сконфигурированный с возможностью изменения положения между неограниченным числом положений, при этом каждое из неограниченного числа положений ориентирует третий элемент относительно четвертого элемента в отличающееся положение в плоскости Y-Z.
40. Медицинский инструмент по п. 39, в котором третий элемент управления содержит второй активный элемент управления, сконфигурированный с возможностью изменения положения между неограниченным числом положений, при этом каждое из неограниченного числа положений ориентирует концевой эффектор в отличающееся положение.
41. Медицинский инструмент по п. 40, дополнительно содержащий окклюзирующий зажим, установленный с возможностью снятия на концевом эффекторе, при этом множество элементов управления содержит четвертый элемент управления для снятия окклюзирующего зажима с концевого эффектора, причем четвертый элемент управления содержит пассивный элемент управления, сконфигурированный с возможностью либо разъема, либо фиксации соединения между концевым эффектором и окклюзирующим зажимом.
42. Медицинский инструмент по п. 37, в котором:
второй элемент управления содержит второй пассивный элемент управления, сконфигурированный с возможностью изменения положения между первым положением, которое допускает свободное перемещение третьего элемента относительно четвертого элемента в плоскости Y-Z, и вторым положением, которое сдерживает перемещение третьего элемента относительно четвертого элемента в плоскости Y-Z.
43. Медицинский инструмент по п. 42, в котором третий элемент управления содержит активный элемент управления, сконфигурированный с возможностью изменения положения между неограниченным числом положений, при этом каждое из неограниченного числа положений ориентирует концевой эффектор в отличающееся положение.
44. Медицинский инструмент по п. 43, дополнительно содержащий окклюзирующий зажим, установленный с возможностью снятия на концевом эффекторе, при этом множество элементов управления содержит четвертый элемент управления для снятия окклюзирующего зажима с концевого эффектора, причем четвертый элемент управления содержит пассивный элемент управления, сконфигурированный с возможностью либо разъема, либо фиксации соединения между концевым эффектором и окклюзирующим зажимом.
| US 5762255 A1, 09.06.1988 | |||
| US 6676684 В1, 13.01.2004 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 7008401 B2, 07.03.2006 | |||
| АППАРАТ О.Б.ОСПАНОВА ДЛЯ КОМПРЕССИОННЫХ АНАСТОМОЗОВ | 1998 |
|
RU2128012C1 |

