Уровень техники
Настоящее изобретение в общем относится к сельскохозяйственным орудиям и, более конкретно, к гидравлической системе управления с единственным гидравлическим пунктом дистанционного управления.
Современные фермеры испытывают острую необходимость в улучшении обработки все увеличивающихся сельскохозяйственных площадей. Такое улучшение обработки требует от фермеров быстрой подготовки почвы и посадки семян в каждом сезоне. Такая спешка обусловливает необходимость в более эффективных и больших сельскохозяйственных машинах.
Ширина захвата таких выпускаемых орудий, как бороны, полевые катки или комбинированные бороны с катками, превышает 60 футов в полевом рабочем положении. Кроме того, для распределения семян по полю используются сеялки, которые также становятся все более широкозахватными в полевом рабочем положении. Увеличенная ширина захвата повышает эффективность полевых работ за счет увеличения количества рядов, засеиваемых за один проход или увеличения площади, культивируемой за один проход. Однако по мере увеличения ширины захвата сельскохозяйственных орудий возникает необходимость в системах, способных складывать такие орудия, делая их более компактными для практичной и безопасной транспортировки по дорогам общего пользования и через ворота, а также для улучшения маневренности. Такие системы обычно состоят из гидравлических цилиндров и клапанов, которые управляются с удаленного пульта оператора для складывания и раскладывания сельскохозяйственного орудия.
Кроме того, в таких сельскохозяйственных орудиях, как сеялки с анкерными сошниками, требующих силовых гидравлических цепей для выполнения все возрастающего количества других задач, также требуется большее количество управляющих интерфейсов. Такое увеличенное количество управляющих интерфейсов повышает сложность гидравлической системы в целом, и в кабине оператора в тягаче этого сельскохозяйственного орудия уменьшается место для других органов управления орудием. Узкая в транспортном положении сеялка с анкерными сошниками, например, может выполнять несколько функций, выполняемых с помощью гидравлической энергии, например подъем и опускание инструментов для взаимодействия с землей, например сошников, приложение усилия перемещения к инструментам для взаимодействия с землей и задание давления прикатывания, которое создается прикатывающими катками. Кроме того, как указано выше, боковые секции сеялки с анкерными сошниками, установленные на противоположных боковых сторонах неподвижной секции рамы, гидравлическими средствами складываются в транспортное положение и опускаются из транспортного положения в рабочее, разложенное положение. К неподвижной секции рамы и к боковым секциям также гидравлическими средствами прикладывают направленное вниз давление, чтобы предотвратить поворот боковых секций вверх под действием результирующей силы от инструментов для взаимодействия с землей. Кроме того, поскольку в сочетании с сеялками обычно используют тележку с источником сжатого воздуха, функции такой тележки, такие как работа нагнетателя и дозирование семян, также требуют гидравлического управления.
Раскрытие изобретения
Настоящее изобретение направлено на гидравлическое устройство управления для складного сельскохозяйственного орудия, которое устраняет некоторые недостатки известных гидравлических систем. Сельскохозяйственное орудие по существу содержит неподвижную раму и пару боковых секций, шарнирно закрепленных на противоположных боковых сторонах неподвижной секции рамы. Первая гидравлическая управляющая система используется для управления переносом веса на инструменты для взаимодействия с землей, установленные на неподвижной и боковых секциях рамы. Вторая гидравлическая система используется для складывания и раскладывания боковых секций. Имеется гидравлический пульт управления, который стыкуется с обеими гидравлическими системы для управления последовательностью операций, выполняемых первой и второй гидравлическими системами.
Одной из задач настоящего изобретения является создание менее сложной гидравлической системы для складывания и раскладывания боковых секций складного сельскохозяйственного орудия и для опускания инструментов складного сельскохозяйственного орудия в положение зацепления с землей.
Другой задачей настоящего изобретения является создание единственного гидравлического пульта дистанционного управления для управления первой гидравлической системой, которая управляет переносом веса на инструменты для взаимодействия с землей, и второй гидравлической системой, которая управляет складыванием и раскладывание боковых секций.
Еще одной задачей настоящего изобретения является создание гидравлического пульта дистанционного управления, выполненного с возможностью отключения по меньшей мере первой группы гидравлических цилиндров, которые опускают инструменты для взаимодействия с землей, когда боковые секции перемещаются в сложенное положение второй группой гидравлических цилиндров и, дополнительно выполненного с возможностью отключения второй группы гидравлических цилиндров, когда инструменты находятся в положении зацепления с землей.
Другие задачи, признаки, аспекты и преимущества настоящего изобретения будут очевидны специалистам в данной области техники из приведенного ниже подробного описания и приложенных чертежей. Однако следует понимать, что подробное описание и конкретные примеры, хоть и указывают на предпочтительные варианты настоящего изобретения, приведены для иллюстрации и не являются ограничивающими. В изобретение могут быть внесены различные изменения и дополнения, не выходящие за рамки объема изобретения, и настоящее изобретение включает все такие изменения и дополнения.
В настоящее изобретение могут быть внесены различные изменения и дополнения, не выходящие за рамки объема изобретения. Объем таких изменений будет очевиден из приложенной формулы изобретения.
Краткое описание чертежей
Предпочтительные иллюстративные варианты настоящего изобретения показаны на приложенных чертежах, на которых одинаковыми позициями обозначены одинаковые элементы.
На чертежах:
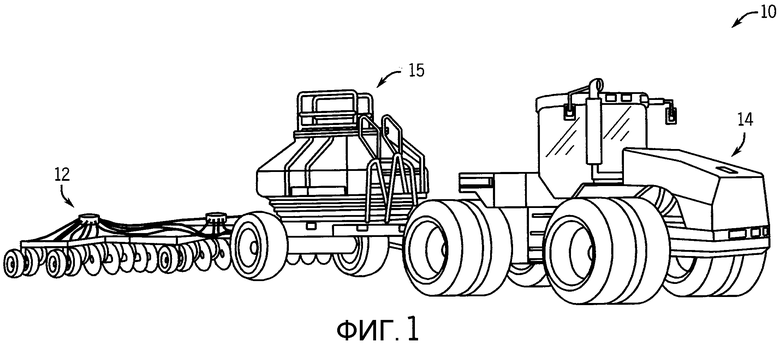
Фиг.1 представляет собой вид в перспективе посадочной системы, содержащей прицепное сельскохозяйственное орудие, буксируемое тягачом.
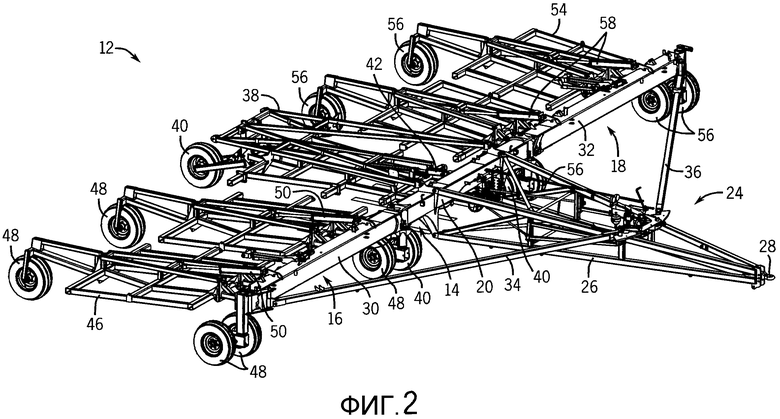
Фиг.2 представляет собой вид в перспективе сверху сеялки с анкерными сошниками в разложенном рабочем положении, предназначенной для использования с посадочной системой по фиг.1 и показанной без инструментов для взаимодействия с землей.
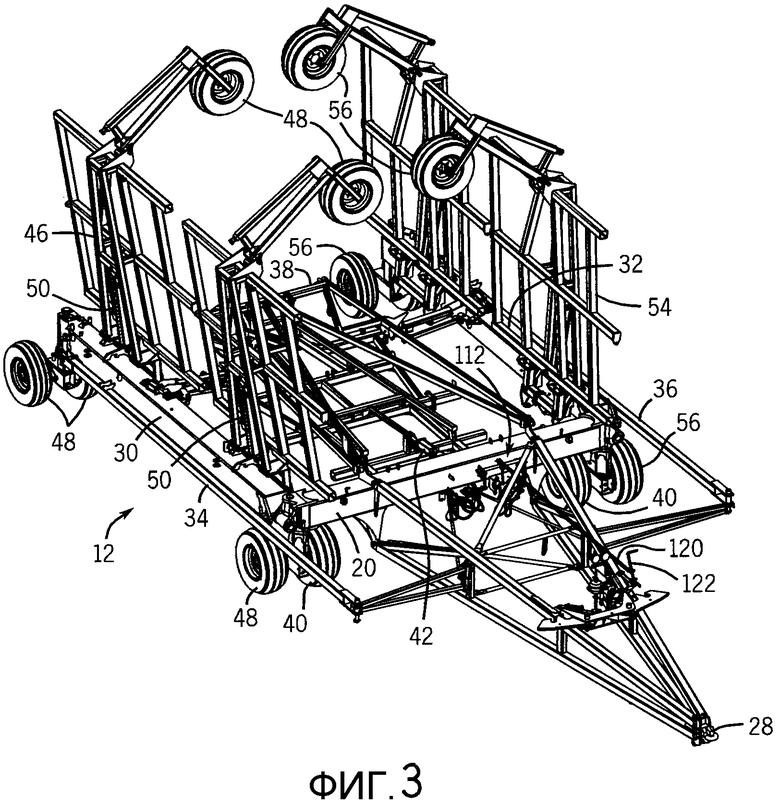
Фиг.3 представляет собой вид в перспективе сверху сеялки с анкерными сошниками в сложенном, транспортном положении.
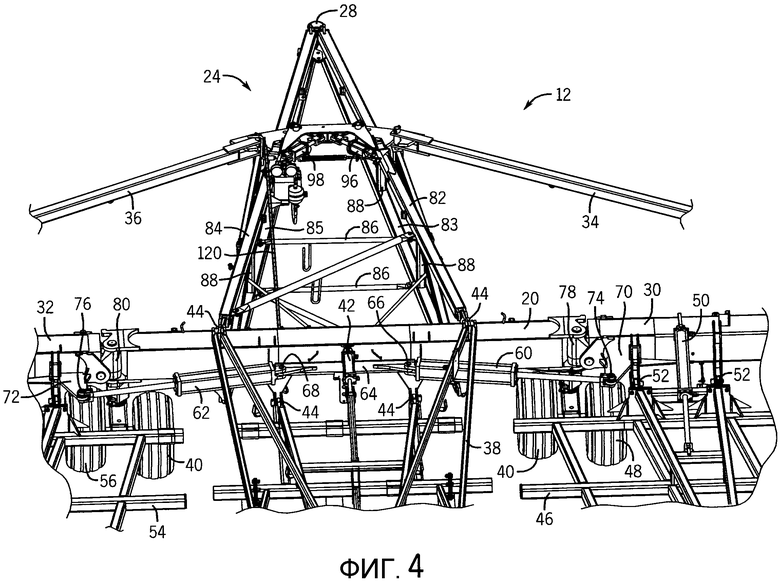
Фиг.4 представляет собой вид в перспективе сзади передней части сеялки с анкерными сошниками.
Фиг.5 представляет собой увеличенный вид передней части сеялки с анкерными сошниками.
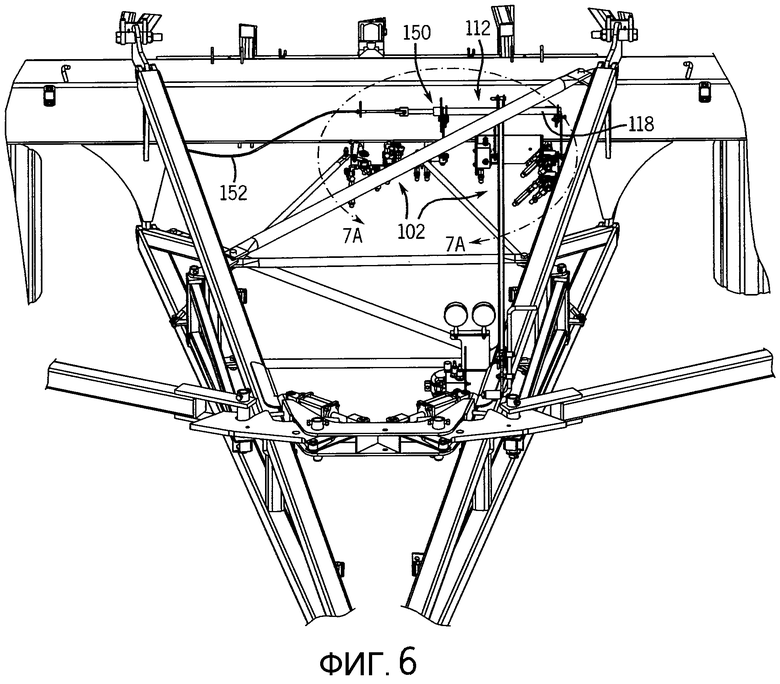
Фиг.6 представляет собой вид в перспективе спереди центральной секции сеялки с анкерными сошниками.
Фиг.7А и 7В представляют собой виды в перспективе устройства блокировки клапана по одному аспекту настоящего изобретения.
Фиг.8 представляет собой схему первой предпочтительной гидравлической управляющей системы для сеялки с анкерными сошниками.
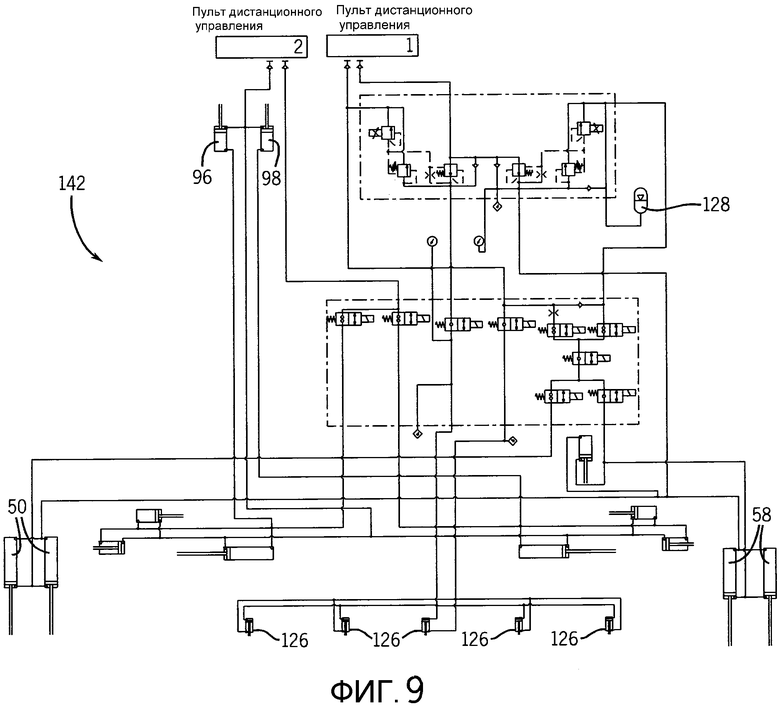
Фиг.9 представляет собой схему второй предпочтительной гидравлической управляющей системы для сеялки с анкерными сошниками.
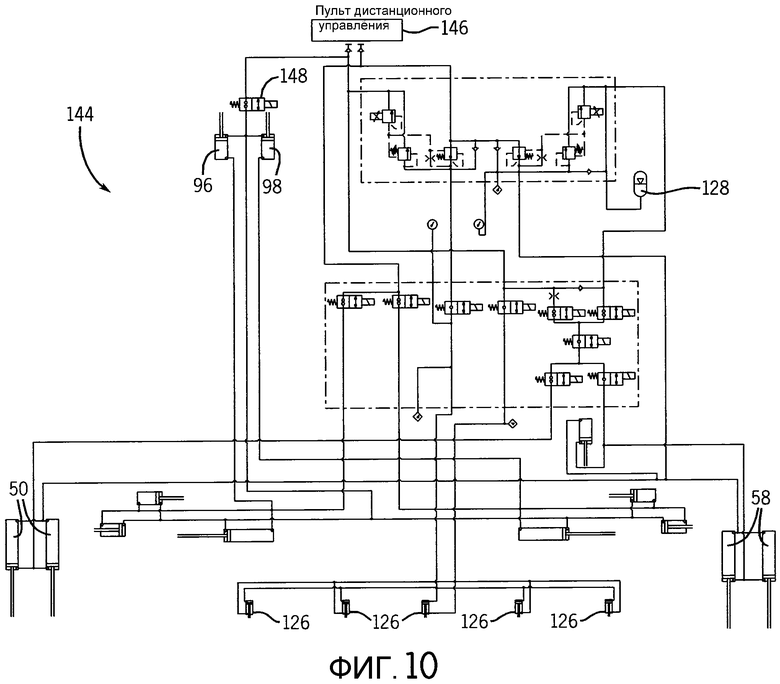
Фиг.10 представляет собой схему третьей предпочтительной гидравлической управляющей системы для сеялки с анкерными сошниками.
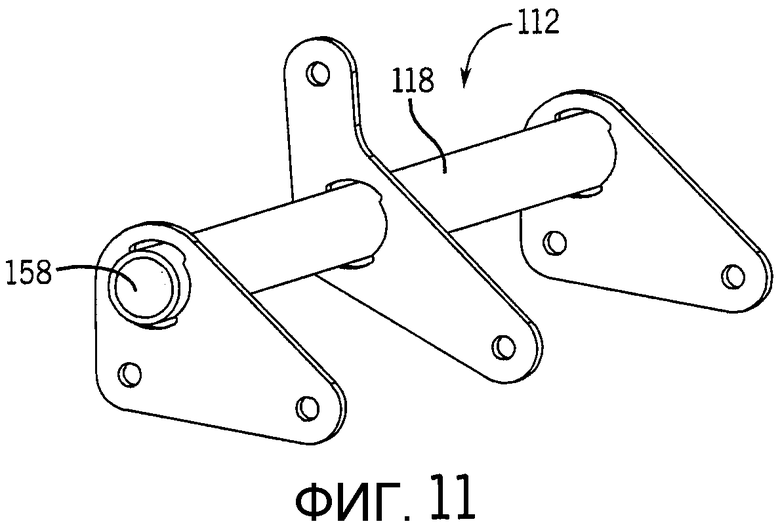
Фиг.11 представляет собой вид в перспективе оси качающегося рычага привода клапана сеялки по фиг.2.
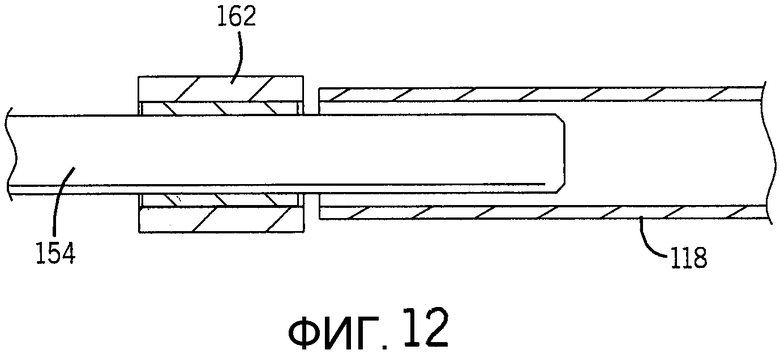
Фиг.12 представляет собой сечение по линии 12-12 на фиг.7А.
Подробное описание изобретения
Как показано на фиг.1, посадочная система 10 по одному варианту настоящего изобретения содержит складное орудие 12, показанное в полевом рабочем положении, соединенное с тягачом 14, например трактором, известным способом. Посадочная система 10 также может содержать тележку 15 с источником сжатого воздуха, как известно специалистам в данной области техники. Хотя настоящее изобретение применимо к складным сельскохозяйственным орудиям разных типов, для иллюстрации будет приведено описание со ссылками на сеялку с анкерными сошниками.
Как показано на фиг.2, сеялка 12 с анкерными сошниками имеет центральную секцию 14 рамы и две боковые секции 16, 18, шарнирно установленные на противоположных сторонах центральной секции 14 рамы. Боковые секции 16, 18 выполнены с возможностью складывания в транспортное положение, в котором боковые секции 16, 18 сложены над центральной секцией 14 рамы для создания узкой транспортной конфигурации, которую можно транспортировать между полями по дорогам общего пользования и хранить. Сеялка с анкерными сошниками в сложенном, транспортном положении показана на фиг.3.
Центральная секция 14 рамы имеет рабочий брус 20, с которым соединено дышло 24. Дышло 24 по существу содержит раму 26, дистальный конец которой прикреплен к рабочему брусу 22, а проксимальный конец образует точку 28 сцепки для соединения с тягачом известным способом. Боковые секции 16, 18 имеют соответствующие брусья 30, 32 и растяжки 34, 36, соединяющие раму 26 с боковыми брусьями 20, 32 соответственно. Растяжки 34, 36 шарнирно соединены с рамой 26 и боковыми брусьями 30, 32, поэтому, когда боковые брусья 30, 32 втягиваются внутрь, растяжки 34, 36 вытягиваются в сложенное положение, как показано на фиг.3.
Центральная вспомогательная рама 38 шарнирно установлена на центральном рабочем брусе 20 и поддерживается над поверхностью поля колесом 40. На вспомогательной раме 38 известным способом могут быть установлены инструменты для взаимодействия с землей (не показаны), например дисковый сошник. Как дополнительно показано на фиг.4, между центральным рабочим брусом 20 и центральной вспомогательной рамой 38 установлен прижимающий цилиндр 42. При соответствующем включении гидравлический цилиндр 42 стремится повернуть центральную вспомогательную раму 38 вокруг шарнирного соединения 44, чтобы приложить к вспомогательной раме 38 прижимное усилие.
Как показано на фиг.2 и 4, боковая секция 16 имеет правую вспомогательную раму 46, которая шарнирно соединена с боковым брусом 30 и удерживается над поверхностью поля колесами 48. На вспомогательной раме 46 известным способом установлены инструменты для взаимодействия с землей (не показаны). Боковой брус 30 и вспомогательная рама 46 соединены подъемными цилиндрами 50, которые при соответствующем включении поворачивают вспомогательную раму 46 вокруг шарнирного соединения 52 в положение по существу над боковым брусом 30. Цилиндры 50 также прикладывают к вспомогательной раме 46 прижимное усилие для введения сошников в зацепление с землей.
Аналогично боковая секция 18 имеет левую вспомогательную раму 54, шарнирно соединенную с боковым брусом 32 и поддерживаемую над поверхностью поля колесами 56. Инструменты для взаимодействия с землей (не показаны) установлены на вспомогательной раме 54 известным способом. Между боковым брусом 32 и вспомогательной рамой 54 установлены подъемные цилиндры 58, которые при включении поворачивают вспомогательную раму 54 вокруг шарнирного соединения (не показано), чтобы поднять вспомогательную раму 54 над боковым брусом 32. Цилиндры 58 также прикладывают к вспомогательной раме 54 прижимное усилие для введения сошников в зацепление с землей.
Как лучше всего показано на фиг.4, сеялка 12 с анкерными сошниками также содержит правый складывающий цилиндр 60 и левый складывающий цилиндр 62. Цилиндры 60, 62 установлены между боковыми брусьями 30, 32 и центральным рабочим брусом 20, соответственно. Более конкретно, на задней поверхности центрального рабочего бруса 20 образован крепежный фланец 64, и внутренние концы цилиндров 60, 62 шарнирно прикреплены к крепежному фланцу 64 в шарнирных точках 66, 68, соответственно. Наружные концы цилиндров 60, 62 шарнирно соединены с крепежными фланцами 70, 72, соответственно, прикрепленными к боковым брусьям 30, 32, соответственно в шарнирных точках 74, 76 соответственно. Когда цилиндры 60, 62 соответственно приведены в действие, они вытягивают брусья 30, 32 внутрь (назад) так, что брусья 30, 32 поворачиваются вокруг кулаков 78, 80 на противоположных концах центрального рабочего бруса 20, соответственно.
Как показано на фиг.4, дышло 24 образовано двумя парами установленных друг над другом рельсов 82, 83, 84 и 85, соединяющих центральный рабочий брус 20 и точку 28 сцепки. Расположенные друг над другом рельсы 82, 83, 84 и 85 наклонены внутрь от места их соединения с центральным рабочим брусом 20 к точке 28 сцепки так, что дышло 24 имеет по существу треугольную форму. Дышло 24 также содержит множество поперечин 86 и стоек 88, поддерживающих расположенные друг над другом рельсы 82, 83, 84 и 85. Как лучше всего показано на фиг.5, дышло 24 содержит поворотное крепление 90, установленное между парой расположенных друг над другом рельсов. С поворотным устройством 90 шарнирно соединена пара кулис 92, 94, охватывающих передние концы растяжек 34, 36. Между кулисами 92, 94, соответственно, и верхними рельсами 82, 84, соответственно, установлены поворотные цилиндры 96, 98. Поэтому, когда цилиндры 96, 98 приведены в действие, кулисы 92, 94 поворачиваются так, чтобы открыться, освободить растяжки 34, 36, позволяя им следовать за боковыми секциями 16, 18, когда они поворачиваются вокруг кулаков 78, 80. Поток гидравлической текучей среды к цилиндрам 96, 98 регулируется клапанами V4 и V8 или 2A и 2B в зависимости от схемы. См. фиг.8 и 9.
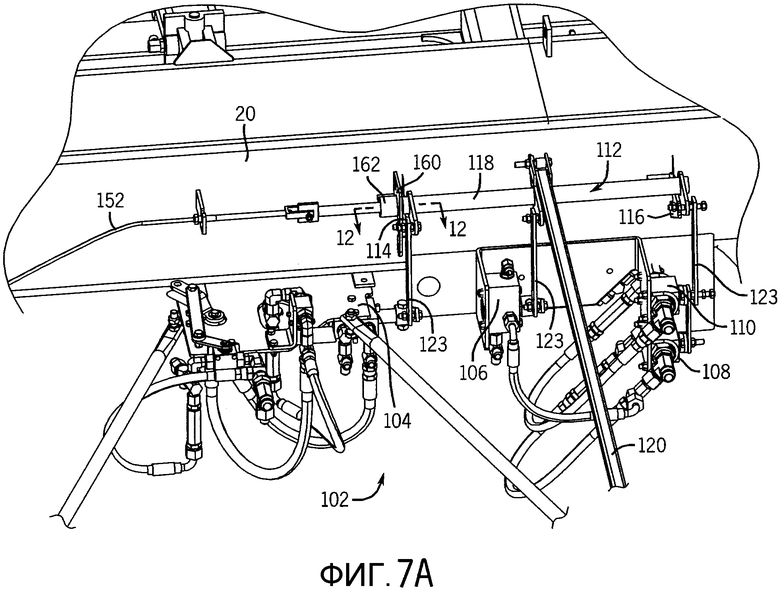
Как показано на фиг.6, множество корпусов клапанов, в общем, обозначенное позицией 102, управляет потоком гидравлической текучей среды к цилиндрам 42, 50, 58, 60 и 62. Корпусы 102 клапанов установлены на соответствующих крепежных кронштейнах (не показаны), которые в свою очередь прикреплены к центральному рабочему брусу 20 или выполнены за одно целое с ним. Корпусы 102 клапанов расположены перед центральным рабочим брусом 20. Для упрощения, трубки, соединяющие корпусы 102 клапанов с цилиндрами 42, 50, 58, 60 и 62, не показаны, но следует понимать, что гидравлическое соединение между клапанами и цилиндрами по гидравлическим трубкам должно быть известно специалистам в данной области техники. Как лучше всего видно на фиг.7А, корпусы 102 клапанов содержат корпусы 104, 106, 108 и 110 клапанов, которые механически связаны с осью 112 качающегося рычага, которая установлена на центральном рабочем брусе 20 в паре крепежных фланцев 114, 116. Работа клапанов 104-110 будет описана со ссылками на схему на фиг.8. Ось 112 качающегося рычага имеет трубчатый корпус 118, с которым соединен управляющий рычаг 120. Управляющий рычаг 120 имеет рукоятку 122 (фиг.5), которая позволяет оператору дистанционно поворачивать ось 112 качающегося рычага. Когда ось 112 качающегося рычага поворачивается, клапаны в корпусах 104, 106, 108 и 110 переключаются. То есть, корпусы 104, 106, 108 и 110 клапанов механически соединены с осью 112 качающегося рычага тягами 123.
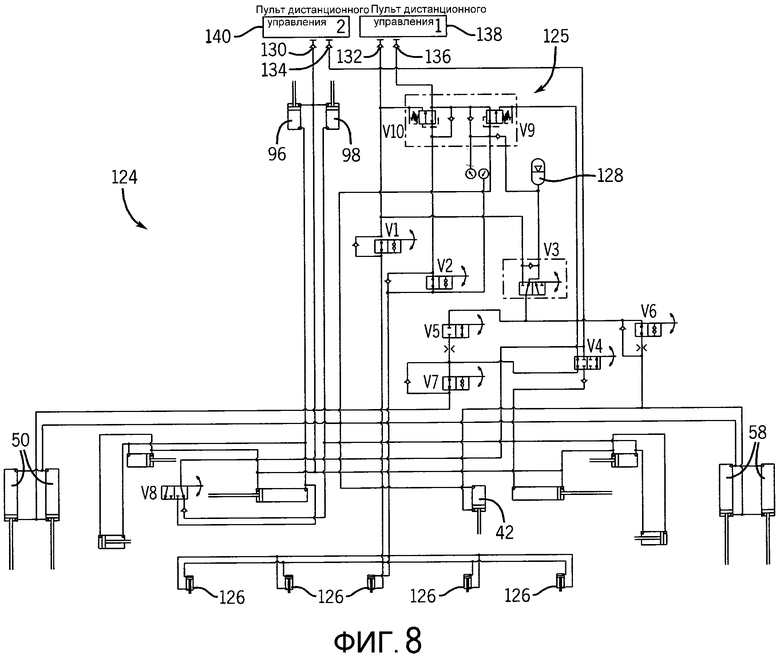
На фиг.8 показан гидравлический контур для управления подъемом и опусканием и складыванием и раскладыванием сеялки 12 с анкерными сошниками. Контур 124 содержит группу редукционных/предохранительных клапанов 125, которые регулируют гидравлическое давление на базовом конце цилиндров 42, 50 и 58 рабочей рамы и цилиндров 126 сошников. Клапаны V1, V2, V3 и V4 расположены в корпусах 108, 110, 106 и 104, соответственно. Клапаны V1 и V2 используются для блокирования цилиндров сошников, когда сеялка 12 не находится в рабочем положении. Поэтому клапаны V1 и V2 закрыты и сошники опустить нельзя. Клапан V3 находится в левом положении, когда машина находится в рабочем положении. Это требуется для того, чтобы гидравлическая текучая среда могла возвращаться со штокового конца цилиндра 42, 50, 58 рабочей рамы в аккумулятор 128. Клапан V4 позволяет текучей среде проходить в гидравлическую систему из гидравлической системы (не показана) тягача, т.е. трактора. Следует понимать, что гидравлический контур 124 имеет пару подающих отверстий 130, 132 и пару возвратных отверстий 134, 136.
В варианте по фиг. 8 гидравлический контур 124 содержит два вспомогательных контура. Контур рамы для управления последовательностью складывания и раскладывания сеялки, и для подъема и опускания сошек, и контур поворота, для управления поворотом боковых брусьев внутрь в транспортное положение и наружу в рабочее положение. Каждый вспомогательный контур активируется отдельным пультом 138, 140 дистанционного управления.
Когда оператор желает сложить орудие, оператор перемещает рычаг 120 в транспортное положение, что приводит к повороту оси качающегося рычага. При повороте оси качающегося рычага клапаны V1, V2 перемещаются в закрытое положение, клапан V3 находится в правом положении, и клапан V4 находится в правом положении. Затем, с помощью пульта дистанционного управления оператор может задать начало складывания сеялки. Более конкретно, при активировании пульта 138 дистанционного управления сначала складывается правая сторона сеялки. Оператор может повернуть правый боковой брус 16 внутрь, используя пульт 140 дистанционного управления. Это приводит к открыванию клапана V5 и закрыванию клапана V6. Теперь можно повернуть вверх левую сторону сеялки так, чтобы левая вспомогательная рама повернулась в положение над боковым брусом 18. Это переводит клапан V8 в левое положение. Затем боковой брус 18 можно повернуть внутрь, чтобы перевести сеялку в транспортное положение, показанное на фиг.3. Поскольку клапаны V6 и V7 в закрытом положении являются блокирующими (обратными) клапанами, на штоковый конец цилиндра можно подавать давление. Это позволяет оператору поднять вспомогательные рамы, если они опускаются из-за внутренней протечки в клапане.
Специалистам в данной области техники следует понимать, что для раскладывания сеялки 12 из транспортного положения в рабочее положение оператор вновь использует пульт 138 дистанционного управления, чтобы начать процесс раскладывания. Сначала левый боковой брус поворачивается наружу в выдвинутое положение. Затем, левая вспомогательная рама, правый боковой брус и затем правая вспомогательная рама опускаются в положение, показанное на фиг.2. Затем оператор переводит управляющий рычаг 120 в рабочее положение. Это заставляет повернуться ось качающегося рычага, в результате чего клапаны V1 и V2 открываются, чтобы выдвинуть цилиндры сошников и опустить сошники в зацепление с землей. Клапан V3 также перемещается в открытое положение, что позволяет вспомогательным рамам смещаться в ответ на изменение контура почвы. Клапан V4 перемещается в закрытое положение.
Следует понимать, что гидравлический контур 124 обеспечивает управляемую последовательность перемещений складывания и раскладывания сеялки 12 с использованием сети отсекающих и определяющих последовательность клапанов, которые механически соединены для открывания и закрывания в заданном порядке. Кроме того, следует понимать, что контур 124 также позволяет использовать один пульт дистанционного управления, например пульт 138, для управления не только подъемом и опусканием вспомогательных рам, но и переносом веса на вспомогательные рамы, силой, действующей на концы инструментов для взаимодействия с землей, и силой прикатывания. Более конкретно, клапаны, регулирующие давление, включают клапаны V9 и V10, которые позволяют задавать разные уровни переноса веса рамы и силы на конце сошника.
Использование одного пульта дистанционного управления для переноса веса и задания силы на сошнике и силы прикатывания позволяет экономить время. То есть, когда сошники опускаются и вступают в зацепление с землей, следует применить перенос веса на рамы. С другой стороны, когда сошники подняты, весовую нагрузку следует снять, чтобы уменьшить напряжение во вспомогательных рамах. При использовании одного пульта дистанционного управления такой перенос веса на рамы и с рамы происходит всегда. Кроме того, при складывании в транспортное положение сошники полностью поднимаются с почвы до того, как будут подняты вспомогательные рамы. Таким образом, устраняется возможность ситуации, когда оператор забывает поднять сошники из почвы перед транспортировкой. В результате контур 124 исключает возможность слишком низкого положения сошников, когда сеялка складывается в транспортное положение.
Другими словами, использование одного пульта дистанционного управления для вспомогательного контура сброса давления и вспомогательного контура отсечки/задания последовательности позволяет: (1) исключить перенос веса на вспомогательные рамы, пока сошники не будут опущены, (2) снять перенесенный на вспомогательные рамы вес до того, как сошники будут подняты, (3) поднимать сошники до того, как будут подняты вспомогательные рамы, и (4) опускать вспомогательные рамы до того, как сошники будут опущены в положение зацепления с землей.
На фиг.9 приведена схема другого гидравлического контура для использования с сеялкой, показанной на фиг.2. В этом варианте контур 142 по существу аналогичен контуру 124, описанному выше, но в нем для управления подъемом и опусканием и складыванием и раскладыванием сеялки используются электромагнитные клапаны, а не клапаны с механическим приводом.
На фиг.10 показана схема еще одного варианта предпочтительного гидравлического контура 144 по другому аспекту настоящего изобретения. В этом варианте, который для иллюстрации, имеет такую же конструкцию, что и контур по фиг.9, контур управления поворотом и контур управления рамами имеют один пульт 146 дистанционного управления. Поэтому в этом варианте можно использовать один гидравлический пульт дистанционного управления для управления подъемом и опусканием сошников, подъемом и опусканием вспомогательных рам и поворотами внутрь и наружу складных брусьев. Контур 144 включает клапан 148 включения/выключения для активации/деактивации вспомогательного контура управления поворотами.
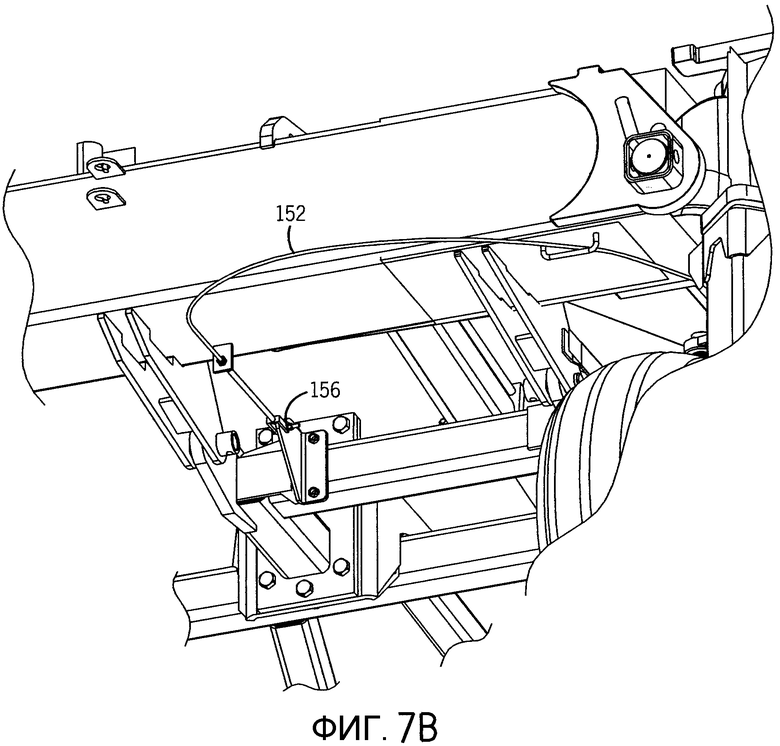
Как описано выше, одним из недостатков известных складных сельскохозяйственных орудий является возможность непреднамеренного опускания рамы орудия в транспортном положении. Если перевести клапаны в полевое положение при транспортировке орудия или когда клапаны уже находятся в полевом положении, когда орудие находится в транспортном положении, рама орудия может свободно поворачиваться и опускаться без управляющего воздействия. Для предотвращения таких случаев в настоящем изобретении предусмотрена блокирующая конструкция 150, лучше всего показанная на фиг.7А и 7В.
Блокирующая конструкция 150 по существу состоит из троса 152 реверсивного действия и скользящего пальца 154. Скользящий палец 154 прикреплен к концу троса 152 реверсивного действия рядом с осью 112 качающегося рычага. Противоположный конец троса 152 реверсивного действия прикреплен в точке 156 к одной из боковых секций, например к вспомогательной раме 46.
В качестве альтернативы, трос 152 реверсивного действия может быть прикреплен к вспомогательной раме 54. В любом случае, когда сельскохозяйственное орудие находится в полевом положении, т.е. когда боковые секции 16, 18 разложены и все вспомогательные рамы опущены, как показано на фиг.2, центральный брус и боковые брусья расположены по существу параллельно земле и могут поворачиваться приблизительно на 15 градусов по вертикали относительно поверхности земли, чтобы подстраиваться под профиль поверхности, огибать препятствия и т.п. Когда оператор желает перевести орудие в транспортное положение, он активирует управляющий рычаг 120, что приводит к повороту оси 112 качающегося рычага. Когда эта ось 112 поворачивается, положение клапанов 104-110 меняется, как описано выше. В одном предпочтительном варианте после активации управляющего рычага для изменения положения клапанов в транспортный режим оператор активирует пульт управления, что приводит к повороту правой вспомогательной рамы в положение над боковым брусом 30, после чего боковой брус 30 поворачивается внутрь.
Когда вспомогательная рама 46 повернута, активируется запирающая конструкция 150 по настоящему изобретению. Более конкретно, когда вспомогательная рама 46 поворачивается в положение над рабочим брусом 30, прикрепленный конец троса 152 реверсивного действия толкает трос внутрь, т.е. к оси 112 качающегося рычага. При продолжении поворота вспомогательной рамы палец 154 входит в отверстие 158 (фиг. 11), выполненное в торце оси 112. Когда вспомогательная рама достигнет полностью повернутого положения, палец 154 войдет в ось 112, тем самым препятствуя повороту этой оси 112. В результате, если управляющий рычаг 120 необходимо активировать, когда орудие складывается или уже сложилось, ось 112 не сможет повернуться. Поскольку вращение оси 112 заблокировано, клапаны, управляемые поворотом оси 112, не могут поменять положение. Самое важное, поскольку когда ось 112 повернута движением управляющего рычага 120 в транспортное положение, клапаны V1 и V2 закрыты, блокирование поворота оси 112 предотвращает непроизвольное перемещение оси 112 в «рабочее» положение при движении рычага 120. Поскольку течение гидравлической текучей среды невозможно, сельскохозяйственное орудие не может повернуться или разложиться, как могло бы произойти без блокирующей конструкции 150 по настоящему изобретению. Когда сельскохозяйственное орудие разложено, палец 154 автоматически выходит из оси 112, что позволяет оси 112 поворачиваться при переводе управляющего рычага в «рабочее положение».
Блокирующая конструкция 150 содержит фланец 160, установленный на рабочем брусе 20 и рядом с отверстием 158, выполненным в оси 112 качающегося рычага. Фланец 160 содержит втулку 162, которая установлена соосно отверстию 158, когда ось 112 повернута в транспортное положение. Палец 154 скользит во втулке 162, когда боковая секция 16 складывается. Как описано выше, в полностью сложенном положении палец 152 скользит во втулке 162 и входит в отверстие 158 оси 112 качающегося рычага. Поскольку втулка 162 установлена на фланце 160, который неподвижно закреплен на рабочем брусе 20, когда палец находится в отверстии 158, поворот оси 112 предотвращается.
Следует понимать, что согласно настоящему изобретению предлагается гидравлический контур для использования в сельскохозяйственном орудии, например в сеялке с анкерными сошниками, который обладает многочисленными преимуществами по сравнению с известными гидравлическими контурами или системами. Этот гидравлический контур сконфигурирован и выполнен с возможностью управления последовательностью подъема и опускания и складывания и раскладывания сельскохозяйственного орудия заранее определенным упорядоченным способом. Переносом веса на рамы сельскохозяйственного орудия, силой на конце сошника и силой прикатывания, а также подъемом/опусканием рам и переходом между транспортным и рабочим положениями можно управлять с единственного пульта дистанционного управления. Использование единственного пульта дистанционного управления создает предпочтительное управление последовательностью приложения и снятия веса на рамах и подъема/опускания орудия. В одном варианте один пульт дистанционного управления можно использовать для управления и контуром подъема/опускания рам, и контуром поворота брусьев. Кроме того, согласно другому аспекту изобретения, имеется конструкция блокировки клапанов для предотвращения прохождения потока гидравлической жидкости в цилиндры, которые опускают и поднимают сошники, когда орудие находится в транспортном положении или переходит в транспортное положение.
В настоящее изобретение могут быть внесены многочисленные изменения и дополнения, не выходящие за рамки объема изобретения. Объем таких изменений будет очевиден из приложенной формулы.

Группа изобретений относится к сельскохозяйственным орудиям, в частности к гидравлической системе управления, имеющей один гидравлический пульт дистанционного управления. Гидравлическое устройство управления содержит первую гидравлическую систему для переноса веса на инструменты для взаимодействия с землей, вторую гидравлическую систему для управления складыванием и раскладыванием секций и единственный гидравлический пульт дистанционного управления, выполненный с возможностью управления работой первой и второй гидравлических систем. Гидравлическая система управления характеризуется наличием вышеописанного гидравлического устройства управления. Сельскохозяйственное орудие содержит рабочий брус, имеющий неподвижную секцию рамы, выполненную с возможностью соединения с буксирующим транспортным средством, и первую и вторую боковые секции, шарнирно соединенные с противоположными боковыми сторонами неподвижной секции рамы, множество инструментов, установленных на рабочем брусе, гидравлическую систему управления для управления перемещениями рабочего бруса. Гидравлическая система содержит три группы гидравлических цилиндров и гидравлический пульт дистанционного управления, выполненный с возможностью управления работой первой и второй группы гидравлических цилиндров. Гидравлическая система при простоте конструктивного выполнения обеспечивает складывание и раскладывание боковых секций складного сельскохозяйственного орудия и опускание инструментов для взаимодействия с землей. 3 н. и 17 з.п. ф-лы, 13 ил.
1. Гидравлическое устройство управления для сельскохозяйственного орудия, содержащего неподвижную раму и множество складных секций рамы, шарнирно соединенных с неподвижной рамой, и множество инструментов для взаимодействия с землей, установленных на неподвижной раме и складных секциях рамы, при этом устройство содержит:
первую гидравлическую систему, которая управляет переносом веса на инструменты для взаимодействия с землей,
вторую гидравлическую систему, которая управляет складыванием и раскладыванием складных секций рамы, и
единственный гидравлический пульт дистанционного управления, выполненный с возможностью управления работой первой гидравлической системы и второй гидравлической системы.
2. Устройство по п.1, в котором первая и вторая гидравлические системы выполнены так, что команда от единственного гидравлического пульта дистанционного управления на раскладывание складных секций рамы вызывает предотвращение переноса веса первой гидравлической системой на инструменты для взаимодействия с землей, пока вторая гидравлическая система не завершит раскладывание складных секций рамы.
3. Устройство по п.1, в котором первая и вторая гидравлические системы выполнены так, что команда от единственного гидравлического пульта дистанционного управления на опускание инструментов для взаимодействия с землей в положение зацепления с землей вызывает перенос веса первой гидравлической системой на инструменты для взаимодействия с землей и дополнительно вызывает отключение второй гидравлической системы.
4. Устройство по п.3, в котором вторая гидравлическая система выполнена так, чтобы оставаться отключенной, пока первая гидравлическая система не получит команды от единственного гидравлического пульта дистанционного управления на подъем инструментов для взаимодействия с землей из положения зацепления с землей или не получит команду от оператора.
5. Устройство по п.4, в котором первая и вторая гидравлические системы выполнены так, что команда от единственного гидравлического пульта дистанционного управления на складывание складных секций рамы вызывает поднятие инструментов для взаимодействия с землей первой гидравлической системой из положения зацепления с землей, а затем вызывает складывание складных секций рамы второй гидравлической системой.
6. Устройство по п.5, в котором первая гидравлическая система содержит первое множество цилиндров, установленных на неподвижной раме и складных секциях рамы и выполненных с возможностью опускания инструментов для взаимодействия с землей в положение зацепления с землей, и второе множество цилиндров, прикладывающих прижимное усилие и поднимающих/опускающих секции рамы.
7. Устройство по п.6, в котором вторая гидравлическая система содержит третье множество цилиндров, соединяющих неподвижную секцию рамы и складные секции рамы и выполненных с возможностью выдвижения и отведения складных секций рамы.
8. Устройство по п.7, в котором первая гидравлическая система содержит первый и второй отсечные клапаны, соединенные по текучей среде с третьим множеством цилиндров и выполненные с возможностью регулирования потока гидравлической текучей среды между источником текучей среды и первым и вторым множеством цилиндров.
9. Устройство по п.8, в котором вторая гидравлическая система содержит ряд клапанов последовательности.
10. Гидравлическая система управления для использования в раме сельскохозяйственного орудия, содержащей центральную секцию рамы и первую и вторую боковые секции, установленные на противоположных боковых сторонах центральной секции рамы, и дополнительно содержащей инструменты для взаимодействия с землей, установленные на центральной секции рамы и на боковых секциях, при этом система содержит:
первую группу гидравлических цилиндров, установленных на раме сельскохозяйственного орудия и выполненных с возможностью опускания инструментов для взаимодействия с землей в положение зацепления с землей;
вторую группу гидравлических цилиндров, установленных на раме сельскохозяйственного орудия и выполненных с возможностью прикладывания прижимного усилия и поднятия/опускания боковых секции;
третью группу гидравлических цилиндров, установленных на раме сельскохозяйственного орудия и выполненных с возможностью складывания и раскладывания первой и второй боковых секций; и
гидравлический пульт управления, выполненный с возможностью отключения первой группы гидравлических цилиндров, когда боковые секции перемещаются в сложенное положение второй и третьей группой гидравлических цилиндров, и дополнительно выполненный с возможностью отключения третьей группы гидравлических цилиндров, когда инструменты для взаимодействия с землей находятся в положении зацепления с землей.
11. Система по п.10, дополнительно содержащая первую группу клапанов, соединенных с первой группой гидравлических цилиндров и выполненных с возможностью регулирования потока гидравлической текучей среды под давлением к первой группе гидравлических цилиндров, и дополнительно содержащая вторую группу клапанов, соединенных со второй группой гидравлических цилиндров и выполненных с возможностью регулирования потока гидравлической текучей среды под давлением ко второй группе гидравлических цилиндров, при этом гидравлический пульт дистанционного управления дополнительно выполнен с возможностью повторной подачи давления ко второй группе гидравлических цилиндров, когда имеется внутренняя протечка во второй группе клапанов, когда боковые секции находятся в сложенном положении.
12. Система по п.11, в которой первая группа клапанов содержит отсечные клапаны, а вторая группа клапанов содержит ряд клапанов последовательности, которые регулируют поток гидравлической текучей среды ко второй группе гидравлических цилиндров в заранее определенном порядке так, что первая боковая секция поднимается в сложенное положение до того, как вторая боковая секция поднимается в сложенное положение.
13. Система по п.12, в которой гидравлический пульт управления дополнительно выполнен с возможностью закрытия первой группы гидравлических клапанов, когда вторая группа гидравлических цилиндров поднимает или опускает боковые секции.
14. Система по п.13, в которой гидравлический пульт управления дополнительно выполнен с возможностью установки второй группы гидравлических клапанов в заданное состояние, когда первая группа гидравлических цилиндров опустила инструменты для взаимодействия с землей в положение зацепления с землей.
15. Система по п.10, дополнительно содержащая первый и второй редукционный/предохранительный клапаны или комбинацию клапанов, которые работают как редукционные/предохранительные клапаны, которые выполнены с возможностью избирательного открытия и закрытия, позволяя гидравлическому пульту управления независимо задавать величину веса переносимого на раму сельскохозяйственного орудия и величину давления перемещения, прикладываемого к инструментам для взаимодействия с землей.
16. Сельскохозяйственное орудие, содержащее:
рабочий брус, имеющий неподвижную секцию рамы, выполненную с возможностью соединения с буксирующим транспортным средством, и первую и вторую боковые секции, шарнирно соединенные с противоположными боковыми сторонами неподвижной секции рамы,
множество инструментов для взаимодействия с землей, установленных на рабочем брусе,
гидравлическую систему управления для управления перемещениями рабочего бруса, содержащую:
первую группу гидравлических цилиндров, соединяющих рабочий брус и множество инструментов для взаимодействия с землей и выполненных с возможностью перемещения множества инструментов для взаимодействия с землей между рабочим положением и положением зацепления с землей;
вторую группу гидравлических цилиндров, соединяющих рабочий брус и первую и вторую боковые секции и выполненных с возможностью прикладывания прижимного усилия к неподвижной раме и боковым секциям и поднятия/опускания неподвижной рамы и боковых секций; и
третью группу гидравлических цилиндров, соединяющих неподвижную секцию рамы и первую и вторую боковые секции и выполненных с возможностью перемещения боковых секций между рабочим положением и сложенным положением; и
единственный гидравлический пульт дистанционного управления, выполненный с возможностью управления работой первой группы гидравлических цилиндров и второй группы гидравлических цилиндров.
17. Орудие по п.16, в котором единственный гидравлический пульт дополнительно выполнен с возможностью отключения первой группы гидравлических цилиндров, когда боковые секции перемещаются в сложенное положение второй и третьей группами гидравлических цилиндров, и дополнительно выполнен с возможностью отключения третьей группы гидравлических цилиндров, когда инструменты для взаимодействия с землей находятся в положении зацепления с землей.
18. Орудие по п.17, дополнительно содержащее первую группу клапанов, соединенную с первой группой гидравлических цилиндров и выполненную с возможностью регулирования потока гидравлической текучей среды под давлением к первой группе гидравлических цилиндров, и дополнительно содержащее вторую группу клапанов, соединенную со второй группой гидравлических цилиндров и выполненную с возможностью регулирования потока гидравлической текучей среды под давлением ко второй группе гидравлических цилиндров, при этом гидравлический пульт дистанционного управления дополнительно выполнен с возможностью повторной подачи давления ко второй группе гидравлических цилиндров, когда имеется внутренняя протечка во второй группе клапанов, когда боковые секции находятся в сложенном положении.
19. Орудие по п.18, в котором первая группа клапанов содержит отсечные клапаны, а вторая группа клапанов содержит ряд клапанов последовательности, которые управляют потоком гидравлической текучей среды ко второй группе гидравлических цилиндров в заданном порядке так, что первая боковая секция поднимается в сложенное положение до того, как вторая боковая секция поднимается в сложенное положение.
20. Орудие по п.18, в котором гидравлический пульт управления дополнительно выполнен с возможностью закрытия первой группы клапанов, когда вторая группа гидравлических цилиндров поднимает или опускает боковые секции.
| US 7469648 B2, 30.12.2008 | |||
| ДИАФРАГМЕННЫЙ ЭЛЕКТРОЛИЗЕР | 2005 |
|
RU2296108C1 |
| РАМА ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 2006 |
|
RU2325792C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА САМОХОДНОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 1991 |
|
RU2065260C1 |
| US 5358055 A, 25.10.1994 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

