Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известна функциональная структура разворота диагностических и хирургических элементов многофункциональной диагностико-хирургической робототехнической системы операционного стола с возможностью информационно компьютерного управления (см. Патент UA №72485 Ю.И. Русанова), которая включает вертикальный корпус с возможностью изменения высоты, который позиционно расположен на основании, которое закреплено на неподвижной поверхности и выполнено в виде цилиндра с внешними ребрами жесткости, внутри которого зафиксирована нижняя часть вертикального корпуса, выполненного в виде двух соосных цилиндров: внешнего и внутреннего, с возможностью поворотно-поступательного сдвига внутреннего цилиндра корпуса относительно внешнего цилиндра корпуса, между которыми расположены направляющие в виде двух последовательных колец с полукруглыми пазами, в которых расположены продольные направляющие, закрепленные на внутренней поверхности внешнего цилиндра и внешней поверхности внутреннего цилиндра, при этом в нижней части внешнего цилиндра и на расстоянии от верхней части внутреннего цилиндра зафиксирована верхняя и нижняя вставные шайбы, на противоположных сторонах которых выполнены круглые пазы, а между ними расположен линейный привод поворотный поступательного перемещения внутреннего цилиндра относительно внешнего неподвижного цилиндра, при этом на верхней вставной шайбе закреплен привод с редуктором, внешняя шестерня которого функционально связана с внутренней зубчатой шестеренкой крышки вертикального корпуса, при этом крышка выполнена в нижней части с возможностью разворота внутри внутреннего цилиндра корпуса с возвратно-поступательным сдвигом, а верхняя часть крышки выполнена по размеру больше, чем диаметр внешнего цилиндра неподвижной части корпуса, и расположена над верхней частью внутреннего цилиндра корпуса с возможностью возвратно-поступательного вращения, к которой под углом 120° зафиксированы три устройства индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими элементами и хирургическими элементами (прототип).
Известный прототип имеет технические возможности, которые заключаются в возможности разворота диагностических и хирургических элементов относительно медицинского стола.
Недостатком известного технического решения является ограничение функциональных возможностей, которые заключаются в том, что медицинский стол и функциональная структура разворота диагностических и хирургических элементов не совмещены в единой робототехнической системе.
Техническим результатом предложенного изобретения является расширение функциональных возможностей путем функционально законченной робототехнической системы.
Указанный технический результат достигается следующей функциональной структурой.
Функциональная структура возвратно-поступательного разворота диагностических и хирургических элементов инструментального устройства тороидальной робототехнической системы с выдвижной крышкой включает вертикальный цилиндрический корпус с крышкой и с возможностью разворота посредством шестеренки (шестеренка разворота), которая закреплена или является частью опорной шайбы, в которой нижняя часть выполнена также цилиндрической формы и расположена соосно внутри вертикального цилиндрического корпуса с возможностью разворота и функционально связана с шестеренкой привода с редуктором, который зафиксирован на нижней средней промежуточной шайбе, вертикальные стержни равномерно расположены по окружности внутри вертикального цилиндрического корпуса, а также включает нижнюю шайбу с осевым отверстием, функционально связанную с линейным приводом, имеющим невыдвижную цилиндрическую часть и выдвижную цилиндрическую часть, и он закреплен на нижней шайбе, которая зафиксирована в средней части нижнего цилиндрического корпуса, при этом выдвижная часть линейного привода также функционально связана с верхней шайбой с осевым отверстием, а также включает подшипники и устройства удержания диагностических и хирургических элементов, при этом линейный привод зафиксирован на нижней поверхности нижней шайбы с осевым отверстием, в котором соосно расположена невыдвижная часть линейного привода, которая также расположена с возможностью вращения в осевом отверстии круглой опорной пластины, а на конце выдвижной цилиндрической части линейного привода закреплен подшипник, который зафиксирован в осевом отверстии верхней шайбы, при этом нижняя шайба с осевым отверстием соосно закреплена внутри нижней части цилиндрического корпуса, на внешней поверхности которого закреплены устройства удержания диагностических и хирургических элементов, при этом устройства удержания диагностических и хирургических элементов выполнены электромагнитными, на которых в двух электромагнитных захвата удерживаются корпусы диагностических и хирургических элементов, при этом электромагнитные устройства удержания диагностических и хирургических элементов с равным шагом и последовательно зафиксированы на внешней поверхности нижнего цилиндрического корпуса, выполненного с возможностью возвратно-поступательного разворота и возвратно-поступательного вертикального смещения, во внутренней части которого выполнены радиальные пластины, нижний уровень которых расположен на уровне верхней поверхности нижней шайбы с осевым отверстием, а верхний уровень их расположен с возможностью вертикального возвратно-поступательного смещения в радиальных пазах, которые выполнены в нижней части вертикального цилиндрического корпуса, при этом в нижней цилиндрической части опорной шайбы зафиксированы опорные подшипники, которые с возможностью разворота расположены на крайней верхней поверхности круглой опорной пластины с осевым отверстием, в которой по окружности с равномерным шагом зафиксированы нижние концы вертикальных стержней, а средние их части расположены и зафиксированы как в аналогичных отверстиях нижней средней промежуточной шайбы, где закреплен привод с редуктором, так и в аналогичных отверстиях верхней промежуточной шайбы, на которой закреплены центрирующие подшипники, внешняя вращающаяся поверхность которых функционально связана с внутренней поверхностью вертикального цилиндрического корпуса, а верхние концы вертикальных стержней по аналогичной окружности закреплены в нижней части крышки, которая соосно закреплена в нижней части выдвижной крышки тороидальной робототехнической системы с выдвижными элементами для проведения медицинских процедур.
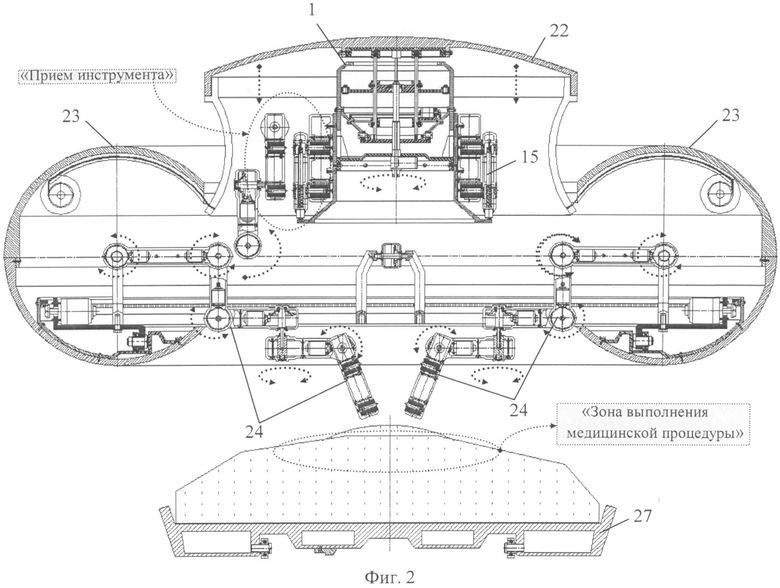
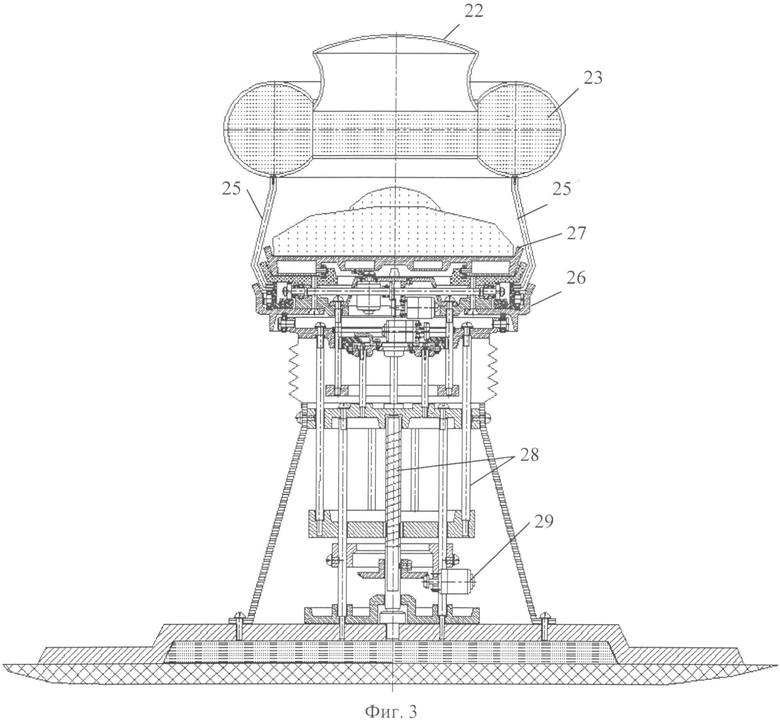
Функциональная структура возвратно-поступательного разворота диагностических и хирургических элементов инструментального устройства тороидальной робототехнической системы с выдвижной крышкой включает вертикальный цилиндрический корпус 1 с крышкой 2 и с возможностью разворота посредством шестеренки (шестеренка разворота) 3, которая закреплена или является частью опорной шайбы 4, в которой нижняя часть выполнена также цилиндрической формы и расположена соосно внутри вертикального цилиндрического корпуса 1 с возможностью разворота и функционально связана с шестеренкой привода с редуктором 5, который зафиксирован на нижней средней промежуточной шайбе 6, вертикальные стержни 7 равномерно расположены по окружности внутри вертикального цилиндрического корпуса 1, а также включает нижнюю шайбу 8 с осевым отверстием, функционально связанную с линейным приводом 9, имеющим невыдвижную цилиндрическую часть 10 и выдвижную цилиндрическую часть 11, и он закреплен на нижней шайбы 8, которая зафиксирована в средней части нижнего цилиндрического корпуса 12. При этом выдвижная часть 11 линейного привода 9 также функционально связана с верхней шайбой 13 с осевым отверстием, а также включает подшипники и устройства удержания 14 диагностических и хирургических элементов 15. При этом линейный привод 9 зафиксирован на нижней поверхности нижней шайбы 8 с осевым отверстием, в котором соосно расположена невыдвижная часть 10 линейного привода 9, которая также расположена с возможностью вращения в осевом отверстии круглой опорной пластины 15, а на конце выдвижной цилиндрической части 11 линейного привода 9 закреплен подшипник 16, который зафиксирован в осевом отверстии верхней шайбы 13, при этом нижняя шайба 8 с осевым отверстием соосно закреплена внутри нижней части цилиндрического корпуса 12, на внешней поверхности которого закреплены устройства удержания 14 диагностических и хирургических элементов 15. При этом устройства удержания 14 диагностических и хирургических элементов 15 выполнены электромагнитными, на которых в двух электромагнитных захватах 17 удерживаются корпусы диагностических и хирургических элементов 15, при этом электромагнитные устройства удержания 14 диагностических и хирургических элементов 15 с равным шагом и последовательно зафиксированы на внешней поверхности нижнего цилиндрического корпуса 12, выполненного с возможностью возвратно-поступательного разворота и возвратно-поступательного вертикального смещения, во внутренней части которого выполнены радиальные пластины 18, нижний уровень которых расположен на уровне верхней поверхности нижней шайбы 8 с осевым отверстием, а верхний уровень их расположен с возможностью вертикального возвратно-поступательного смещения в радиальных пазах 19, которые выполнены в нижней части вертикального цилиндрического корпуса 1, при этом в нижней цилиндрической части опорной шайбы 4 зафиксированы опорные подшипники 20, которые с возможностью разворота расположены на крайней верхней поверхности круглой опорной пластины 15 с осевым отверстием, в которой по окружности с равномерным шагом зафиксированы нижние концы вертикальных стержней 7, а средние их части расположены и зафиксированы как в аналогичных отверстиях нижней средней промежуточной шайбы 6, где закреплен привод с редуктором 5, так и в аналогичных отверстиях верхней промежуточной шайбы 13, на которой закреплены центрирующие подшипники 21, внешняя вращающаяся поверхность которых функционально связана с внутренней поверхностью вертикального цилиндрического корпуса 1, а верхние концы вертикальных стержней 7 по аналогичной окружности закреплены в нижней части крышки 2, которая соосно закреплена в нижней части выдвижной крышки 22 тороидальной робототехнической системы 23 (фиг. 2) с выдвижными элементами 24 для проведения медицинских процедур. На фиг. 3 изображен напольный вариант тороидальной робототехнической системы 23 с выдвижной крышкой 22, которая посредством двух пар стержней 25 расположена с возможностью продольного возвратно-поступательного смещения на неподвижной в продольном направлении части медицинского стола 26, на котором также расположена подвижная в продольном направлении часть медицинского стола 27. При этом неподвижный в продольном направлении медицинский стол 26 расположен на устройстве возвратно-поступательного вертикального смещения 28 посредством привода с редуктором 29.
Логико-динамический процесс функциональной структуры возвратно-поступательного разворота диагностических и хирургических элементов инструментального устройства тороидальной робототехнической системы с выдвижной крышкой заключается в следующем.
Поскольку выдвижная крышка 22 тороидальной робототехнической системы 23 (фиг. 2) выполнена также с возможностью вертикального частичного подъема, то после такого подъема выполняют процедуру установки или снятия из двух электромагнитных захватов 17 (фиг. 1) электромагнитных устройств удержания 14 диагностических и хирургических элементов 15, после чего выдвижную крышку 22 возвращают в исходное положение и эти действия выполняют, когда все выдвижные элементы 24 (фиг. 2) находятся внутри тороидальной робототехнической системы 23, а выдвижная крышка 22 посредством трех тросов и трех приводов опущена. После того как диагностические и хирургические элементы 15 установлены, выполняют подъем выдвижной крышки 22 и осуществляют вывод выдвижных элементов 24 из тороидальной робототехнической системы 16 предварительно в зону «Приема инструмента» для приема диагностических и хирургических элементов 15, а затем выдвижные элементы 24 разворачивают в «Зону выполнения медицинской процедуры». А если учесть, что диагностические и хирургические элементы 15 электромагнитных устройствах удержания 14 расположены в определенной последовательности, а выдвижные элементы 24 находятся в конкретной позиции внутри тороидальной робототехнической системы 23, (фиг. 1) перед приемом диагностических и хирургических элементов 15 посредством привода с редуктором 5 и шестеренки разворота 3 выполняют соответствующий возвратно-поступательный разворот вертикального цилиндрического корпуса 1 и устойчивость такого разворота выполняют опорные подшипники 20 и центрирующие подшипники 21. А поскольку в нижней части вертикального цилиндрического корпуса 1 выполнены радиальные пазы 19 и в них расположены радиальные пластины 18 нижнего цилиндрического корпуса 12, которые опираются на верхнюю поверхность нижней шайбой с осевым отверстием 8, вместе с возвратно-поступательным разворотом вертикального цилиндрического корпуса 1 аналогичный разворот выполняет и нижний цилиндрический корпус 12 с электромагнитными устройствами удержания 14 диагностических и хирургических элементов 15. При этом следует отметить, что нижний цилиндрический корпус 12 с нижней шайбы 8 с осевым отверстием по-существу «висит» на корпусе линейного привода 9 и вместе с ним может выполнять возвратно-поступательное вертикальное смещение вместе с невыдвижной цилиндрической его частью при изменении длины выдвижной его части 11. А поскольку верхний конец выдвижной цилиндрической частью 11 линейного привода 9 зафиксирован посредством подшипника 16 в верхней промежуточной шайбе 13, линейный привод 10, а вмести с ним электромагнитные устройства удержания 14 с диагностическими и хирургическими элементами 15 выполняют как возвратно-поступательное корректировочное вертикальное смещение, так и возвратно-поступательный разворот.
Использование предложенного технического решения позволяет расширить функциональные возможности функциональной структуры возвратно-поступательного разворота диагностических и хирургических элементов инструментального устройства в тороидальной робототехнической системе с выдвижной крышкой.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Функциональная структура возвратно-поступательного разворота диагностических и хирургических элементов инструментального устройства тороидальной робототехнической системы с выдвижной крышкой включает вертикальный цилиндрический корпус с возможностью разворота посредством шестеренки, которая закреплена или является частью опорной шайбы, в которой нижняя часть выполнена также цилиндрической формы и расположена соосно внутри вертикального цилиндрического корпуса с возможностью разворота и функционально связана с шестеренкой привода с редуктором, который зафиксирован на нижней средней промежуточной шайбе, функционально связанной с равномерно расположенными по окружности вертикальными стержнями, которые расположены внутри вертикального цилиндрического корпуса, а также включает нижнюю шайбу с осевым отверстием, функционально связанную с линейным приводом с невыдвижной цилиндрической частью и выдвижной цилиндрической частью, который закреплен в нижней части цилиндрического корпуса, при этом линейный привод также функционально связан с верхней шайбой с осевым отверстием, а также включает подшипники и устройства удержания диагностических и хирургических элементов. 3 ил.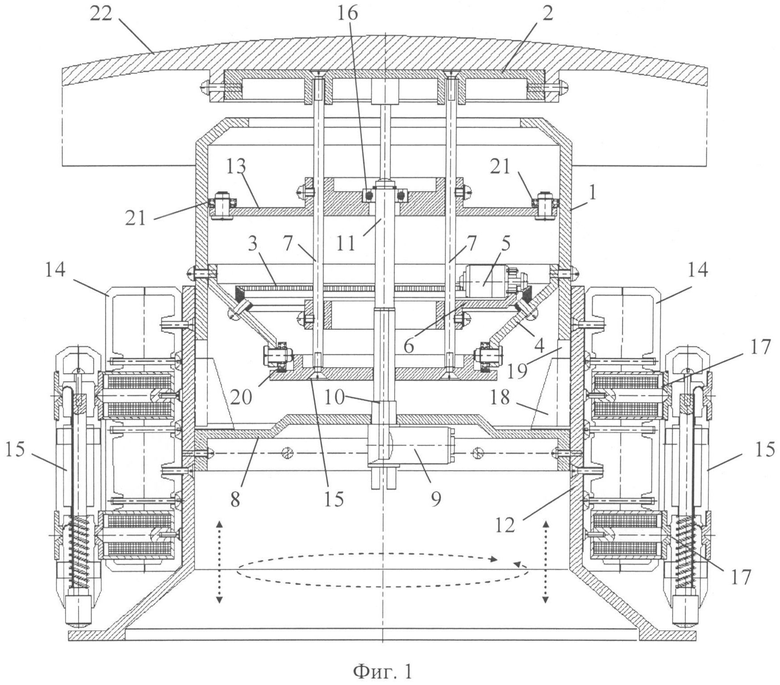
Функциональная структура возвратно-поступательного разворота диагностических и хирургических элементов инструментального устройства тороидальной робототехнической системы с выдвижной крышкой, включающая вертикальный цилиндрический корпус с крышкой и с возможностью разворота посредством шестеренки (шестеренка разворота), которая закреплена или является частью опорной шайбы, в которой нижняя часть выполнена также цилиндрической формы и расположена соосно внутри вертикального цилиндрического корпуса с возможностью разворота и функционально связана с шестеренкой привода с редуктором, который зафиксирован на нижней средней промежуточной шайбе, вертикальные стержни равномерно расположены по окружности внутри вертикального цилиндрического корпуса, а также включает нижнюю шайбу с осевым отверстием, функционально связанную с линейным приводом, имеющим невыдвижную цилиндрическую часть и выдвижную цилиндрическую часть, и он закреплен на нижней шайбе, которая зафиксирована в средней части нижнего цилиндрического корпуса, при этом выдвижная часть линейного привода также функционально связана с верхней шайбой с осевым отверстием, а также включает подшипники и устройства удержания диагностических и хирургических элементов, отличающаяся тем, что линейный привод зафиксирован на нижней поверхности нижней шайбы с осевым отверстием, в котором соосно расположена невыдвижная часть линейного привода, которая также расположена с возможностью вращения в осевом отверстии круглой опорной пластины, а на конце выдвижной цилиндрической части линейного привода закреплен подшипник, который зафиксирован в осевом отверстии верхней шайбы, при этом нижняя шайба с осевым отверстием соосно закреплена внутри нижней части цилиндрического корпуса, на внешней поверхности которого закреплены устройства удержания диагностических и хирургических элементов, при этом устройства удержания диагностических и хирургических элементов выполнены электромагнитными, на которых в двух электромагнитных захватах удерживаются корпусы диагностических и хирургических элементов, при этом электромагнитные устройства удержания диагностических и хирургических элементов с равным шагом и последовательно зафиксированы на внешней поверхности нижнего цилиндрического корпуса, выполненного с возможностью возвратно-поступательного разворота и возвратно-поступательного вертикального смещения, во внутренней части которого выполнены радиальные пластины, нижний уровень которых расположен на уровне верхней поверхности нижней шайбы с осевым отверстием, а верхний уровень их расположен с возможностью вертикального возвратно-поступательного смещения в радиальных пазах, которые выполнены в нижней части вертикального цилиндрического корпуса, при этом в нижней цилиндрической части опорной шайбы зафиксированы опорные подшипники, которые с возможностью разворота расположены на крайней верхней поверхности круглой опорной пластины с осевым отверстием, в которой по окружности с равномерным шагом зафиксированы нижние концы вертикальных стержней, а средние их части расположены и зафиксированы как в аналогичных отверстиях нижней средней промежуточной шайбы, где закреплен привод с редуктором, так и в аналогичных отверстиях верхней промежуточной шайбы, на которой закреплены центрирующие подшипники, внешняя вращающаяся поверхность которых функционально связана с внутренней поверхностью вертикального цилиндрического корпуса, а верхние концы вертикальных стержней по аналогичной окружности закреплены в нижней части крышки, которая соосно закреплена в нижней части выдвижной крышки тороидальной робототехнической системы с выдвижными элементами для проведения медицинских процедур.
| Способ борьбы с искажениями телеграфных сигналов | 1946 |
|
SU72485A1 |
| Метод распознавания окисляющих углеводороды бактерий при геомикробиологической разведке нефтяных и газовых месторождений | 1947 |
|
SU72498A1 |
| Прибор для микроскопического анализа минералов по методу точек | 1940 |
|
SU72499A1 |
| Устройство для стереотаксических операций | 1985 |
|
SU1306572A1 |
| JP 2010206495 A, 16.09.2010 | |||

