РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка притязает на приоритет одновременно находящихся на рассмотрении, предварительных заявок на патент США No. 61/479,540, поданной 27 апреля 2011, No. 61/479,537, поданной 27 апреля 2011, и No. 61/479,543, поданной 27 апреля 2011, и одновременно находящихся на рассмотрении заявок на патент США No. 13/457,577, поданной 27 апреля 2012, No. 13/457,815, поданной 27 апреля 2012, и No. 13/458,012, поданной 27 апреля 2012, при этом содержание всех указанных заявок настоящим включено в данный документ путем ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в целом к устройствам сельскохозяйственного назначения и, более точно, к регулированию глубины нарезания, обеспечиваемой рядным блоком устройства сельскохозяйственного назначения.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Обычные рядные блоки в сельскохозяйственных сеялках опираются на раму, предназначенную для навешивания сменных рабочих органов, посредством параллельного сцепления, который обеспечивает возможность перемещения каждого рядного блока в вертикальном направлении независимо от рамы и других удаленных от нее, рядных блоков в зависимости от профиля почвы. Смещающие средства, такие как пневмоподушки, могут проходить между параллельными сцеплениями для создания дополняющего или дополнительного направленного вниз усилия, действующего на рядный блок. Комплект элементов для нарезания борозды, предусмотренный в обычных рядных блоках, состоит из двух плоских дисковых ножей для нарезания борозды и двух колес для регулирования заглубления. Давно считается, что глубина борозды, нарезаемой посредством рядного блока, оказывает влияние на прорастание и всхожесть семян. Семена, посеянные на слишком большой глубине, имеют запоздалое прорастание, в то время как малая глубина заделки семян может привести к проблемам с развитием корней.
Предпринимаемые в прошлом попытки базировались на измерении нагрузок, действующих на колеса для регулирования заглубления, и последующем регулировании смещающих средств, проходящих между параллельными сцеплениями для создания дополняющего или дополнительного направленного вниз усилия. Одна проблема, связанная с данным подходом, заключается в недостаточной точности и непредсказуемости в системе. Во-первых, в том случае, когда смещающее средство представляет собой пневмоподушку, может быть трудно точно определить объем воздуха в пневмоподушке в заданный момент времени и затем определить необходимое дополнительное направленное вниз усилие. При слишком малом направленном вниз усилии, действующем на рядный блок, семя будет посеяно слишком неглубоко. С другой стороны, слишком большое направленное вниз усилие будет гарантировать проникновение сошника, но также приведет к чрезмерному уплотнению почвы, что опять вызывает проблемы, связанные с развитием корней и прорастанием. Во-вторых, измерение нагрузок, действующих на колесо для регулирования заглубления, не обеспечивает прямого измерения глубины, на которой фактически посеяно семя. Различия в типах и состоянии почв могут привести к искажению данных и к тому, что фермер будет иметь приблизительные оценки в отношении реальной глубины борозды. В завершение, создание дополнительного направленного вниз усилия, действующего на рядный блок, посредством обычных смещающих средств не приводит к реальному изменению глубины, на которой будет посеяно семя. Вместо этого данные системы ограничены обеспечением постоянной единственной глубины.
Соответственно, сохраняется потребность в устройстве, способе и системе, которые не основаны, главным образом, на обычных средствах измерения, но вместо этого основаны на регулировании рядного блока на основе определения некоторых характеристик борозды, например глубины борозды и уровня влажности. Также сохраняется потребность в устройстве, способе и системе, которые могут обеспечить регулирование глубины, на которой происходит посев семени.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В одном примере предложена система дистанционного регулирования глубины нарезания.
В другом примере предложен способ регулировании глубины нарезания, обеспечиваемой рядным блоком устройства сельскохозяйственного назначения.
В еще одном примере предложена система дистанционного регулирования глубины нарезания, и данная система может включать в себя трактор и устройство сельскохозяйственного назначения. Трактор включает в себя систему управления, и устройство сельскохозяйственного назначения включает в себя рядный блок, включающий в себя два ножа для нарезания, привод и датчик. Датчик выполнен с возможностью воспринимать параметр или характеристику, связанную с глубиной нарезания, обеспечиваемой ножами для нарезания, и система управления выполнена с возможностью приема воспринятого параметра и отображения информации, соответствующей воспринятому параметру, на пользовательском интерфейсе. Пользователь может вводить информацию посредством устройства ввода для изменения глубины нарезания, обеспечиваемой ножами для нарезания, посредством перемещения привода. В альтернативном варианте система управления может принимать воспринятый параметр и осуществлять связь с приводом для перемещения привода, в результате чего регулируется глубина нарезания, обеспечиваемая ножами для нарезания.
В еще одном примере предложено устройство сельскохозяйственного назначения, выполненное с возможностью посева семян, и данное устройство включает в себя раму, сошник, соединенный с рамой и выполненный с возможностью нарезания борозды, имеющей некоторую глубину, датчик, выполненный с возможностью воспринимать характеристику, связанную с посевом семян, и генерировать сигнал, соответствующий воспринятой характеристике, и блок обработки данных, принимающий сигнал, соответствующий воспринятой характеристике. Глубина борозды может регулироваться на основе сигнала, соответствующего воспринятой характеристике.
В дополнительном примере предложена система регулирования рядного блока, предназначенная для использования вместе с сельскохозяйственной сеялкой для посева семян. Сельскохозяйственная сеялка включает в себя рядный блок, включающий в себя раму и сошник, соединенный с рамой и выполненный с возможностью нарезания борозды, имеющей некоторую глубину. Система регулирования рядного блока включает в себя привод, соединенный с рядным блоком и выполненный с возможностью регулирования глубины борозды, датчик, выполненный с возможностью воспринимать характеристику, связанную с посевом семян, и генерировать сигнал, соответствующий воспринятой характеристике, и блок обработки данных, соединенный с датчиком и приводом, и при этом блок обработки данных выполнен с возможностью приема сигнала, соответствующего воспринятой характеристике, и осуществления связи с приводом для регулирования глубины борозды на основе данного сигнала.
В еще одном дополнительном примере предложен способ регулирования глубины борозды, нарезаемой посредством рядного блока сельскохозяйственной сеялки. Рядный блок включает в себя раму и сошник, соединенный с рамой. Способ включает в себя определение характеристики, связанной с посевом семян, посредством датчика, генерирование сигнала, соответствующего данной характеристике, посредством датчика, передачу данного сигнала в блок обработки данных и регулирование глубины борозды, нарезаемой посредством рядного блока, на основе сигнала, принятого блоком обработки данных.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой вертикальный вид сбоку приведенного в качестве примера рядного блока устройства сельскохозяйственного назначения, при этом приведенный в качестве примера рядный блок включает в себя приведенный в качестве примера приводной узел, предусмотренный в системе дистанционного регулирования глубины;
фиг. 2 представляет собой вертикальный вид сбоку, аналогичный фиг. 1, с выносом части рядного блока в иллюстративных целях;
фиг. 3 представляет собой увеличенный вертикальный вид сбоку части рядного блока, взятой из фиг. 2;
фиг. 4 представляет собой вид, выполненный по линии 4-4 на фиг. 3;
фиг. 5 представляет собой сечение, выполненное по линии 5-5 на фиг. 4;
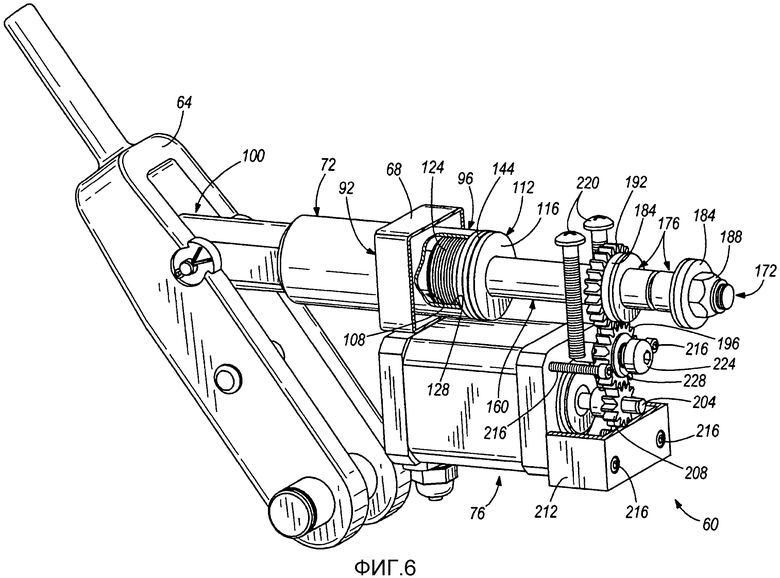
фиг. 6 представляет собой вид в перспективе сверху части приводного узла, при этом часть приводного узла показана с выносом, чтобы показать внутренние компоненты;
фиг. 7 представляет собой схему приведенной в качестве примера системы дистанционного регулирования глубины, предназначенной для устройства сельскохозяйственного назначения, имеющего множество рядных блоков;
фиг. 8 представляет собой вертикальный вид сбоку части рядного блока, показанной с приведенным в качестве примера датчиком; и
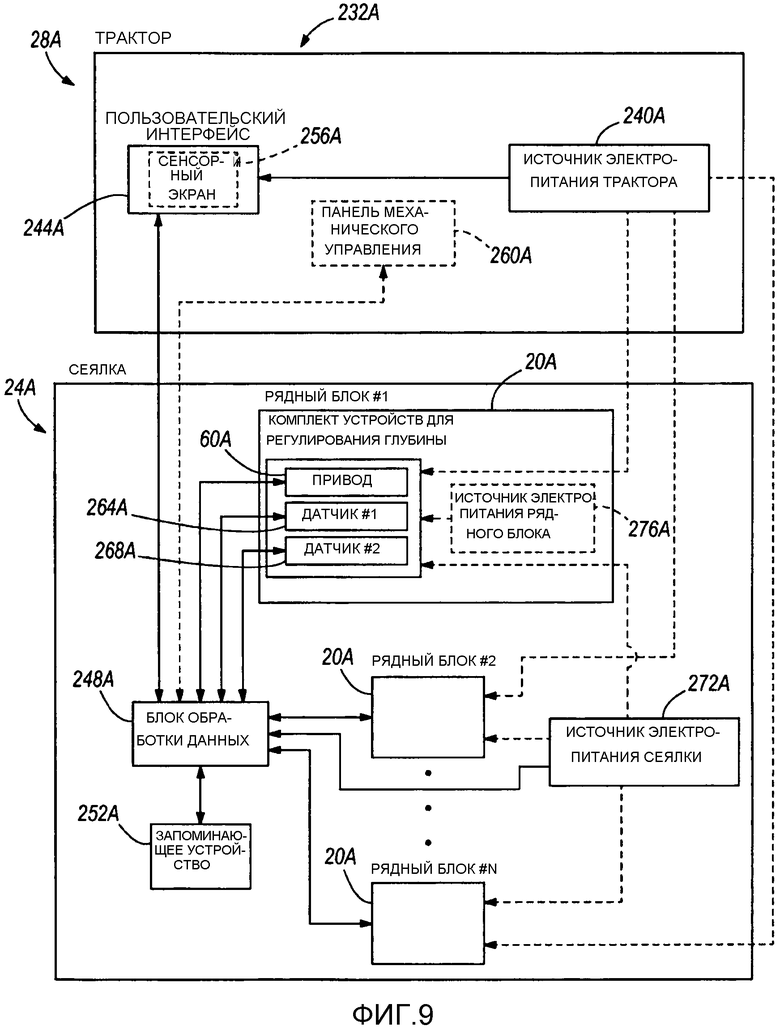
фиг. 9 представляет собой схему другой приведенной в качестве примера системы дистанционного регулирования глубины, предназначенной для устройства сельскохозяйственного назначения, имеющего множество рядных блоков.
Перед подробным разъяснением любых независимых признаков и вариантов осуществления изобретения следует понять, что изобретение при его применении не ограничено деталями конструкции и расположением компонентов, приведенными в нижеследующем описании или проиллюстрированными на чертежах. Изобретение может иметь другие варианты осуществления и может быть реализовано на практике или осуществлено различными способами. Кроме того, следует понимать, что формулировки и термины, используемые в данном документе, предназначены для описания, и их не следует воспринимать как ограничивающие.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Содержание заявки на патент США No. 13/458,012, поданной 27 апреля 2012, озаглавленной “AGRICULTURAL DEVICES, SYSTEMS, AND METHODS FOR DETERMINING SOIL AND SEED CHARACTERISTICS AND ANALYZING THE SAME” и имеющей номер дела патентного поверенного KINZE-48 US-1, заявки на патент США No. 13/457,815, поданной 27 апреля 2012, озаглавленной “DOWN AND/OR UP FORCE ADJUSTMENT SYSTEM” и имеющей номер дела патентного поверенного KINZE-49 US-1, и заявки на патент США No. 13/457,577, поданной 27 апреля 2012, озаглавленной “REMOTE ADJUSTMENT OF A ROW UNIT OF AN AGRICULTURAL DEVICE” и имеющей номер дела патентного поверенного KINZE-50 US-1, все включены в данный документ путем ссылки.
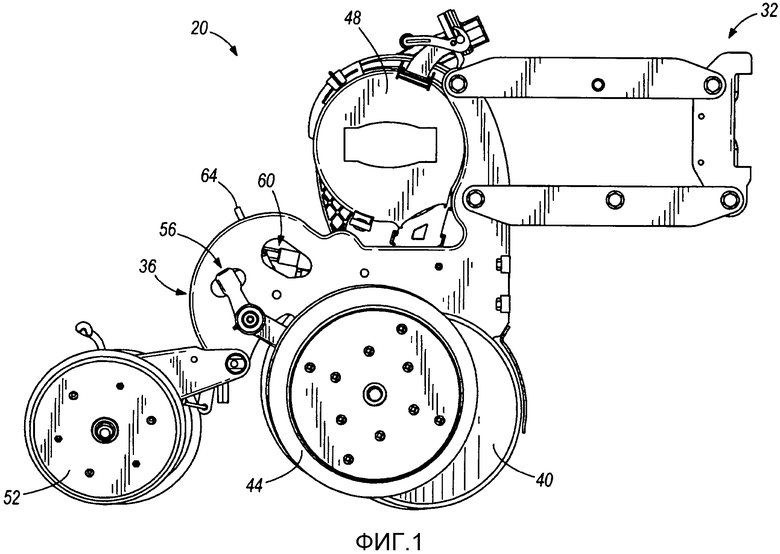
На фиг. 1 проиллюстрирован приведенный в качестве примера, рядный блок 20 устройства 24 сельскохозяйственного назначения (см. фиг. 7). Приведенный в качестве примера рядный блок 20 может представлять собой любой из широкого ряда различных рядных блоков, имеющих различные возможности и функциональность. Аналогичным образом устройство 24 сельскохозяйственного назначения может представлять собой любое из широкого ряда различных устройств сельскохозяйственного назначения, выполненных с возможностью включения в них рядных блоков и имеющих различные возможности и функциональность. В проиллюстрированном приведенном в качестве примера варианте осуществления устройство сельскохозяйственного назначения представляет собой сеялку 24 и рядный блок представляет собой рядный блок 20 сеялки. Нижеприведенное описание и соответствующие фигуры относятся к приведенному в качеству примера варианту осуществления сеялки 24 и рядного блока 20 сеялки. Однако следует понимать, что предусмотрено, что проиллюстрированные приведенные в качестве примера сеялка 24 и рядный блок 20 сеялки не являются ограничивающими, и настоящее изобретение может быть использовано с широким рядом различных устройств сельскохозяйственного назначения и рядных блоков, и они по-прежнему будут находиться в пределах сущности и объема настоящего изобретения.
В проиллюстрированном приведенном в качестве примера варианте осуществления сеялка 24 может включать в себя множество имеющих аналогичную конфигурацию рядных блоков 20 сеялки, каждый из которых выполнен с возможностью посева семян в почву. Для простоты только один рядный блок 20 сеялки будет проиллюстрирован и описан в данном документе. Тем не менее, следует понимать, что сеялка 24 может иметь любое число рядных блоков 20, и подобные многочисленные рядные блоки 20 могут быть выполнены с конфигурацией, которая аналогична конфигурации проиллюстрированного и описанного приведенного в качестве примера, рядного блока 20 сеялки, и могут иметь функциональность, аналогичную функциональности проиллюстрированного и описанного приведенного в качестве примера, рядного блока 20 сеялки.
Во время посева глубину борозды, нарезаемой посредством рядного блока 20, можно регулировать время от времени по различным причинам, включая состояние почвы, эксплуатационные характеристики рядного блока, тип семян, содержание влаги в почве, уплотнение почвы, износ ножа сошника, тип почвы и т.д., но возможные причины не ограничены вышеуказанными. Приведенная в качестве примера система 28 дистанционного регулирования глубины нарезания (см. фиг. 7) предусмотрена для дистанционного регулирования глубины нарезания, обеспечиваемой рядным блоком 20. Подобное дистанционное регулирование глубины нарезания, которое обеспечивается рядным блоком, может быть выполнено из кабины трактора (более подробно описано ниже).
При продолжении рассмотрения фиг. 1 можно отметить, что проиллюстрирован приведенный в качестве примера рядный блок 20 сеялки, который может быть присоединен к раме или брусу (непоказанному) трактора, предназначенной/предназначенному для навешивания сменных рабочих органов, посредством соединительного устройства 32. Рядный блок 20 включает в себя раму 36, присоединенную к соединительному устройству 32, сошник или два плоских круглых дисковых ножа 40, присоединенных к раме 36 и предназначенных для прорезания канавы или нарезания борозды 36 для семян в почве, два колеса 44 для регулирования заглубления, присоединенных к раме 96 и расположенных рядом с ножами 40 и немного позади них, дозатор 48 семян, который отбирает семена поштучно из семенного ящика (непоказанного) и подает семя в борозду, образованную сдвоенными дисковыми ножами 40 сошника, и два разнесенных колеса 52 для заделки, присоединенных к раме 36 и расположенных так, чтобы следовать за посеянным семенем для разрушения боковых стенок борозды с обеих сторон борозды и закрывать семя, заделывать борозду и уплотнять почву над закрытым семенем. Колеса 44 для регулирования заглубления определяют по меньшей мере частично глубину борозды, образованной ножами 40 сошника.
Глубину нарезания, обеспечиваемую ножами 40 сошника, можно регулировать посредством рычажного механизма 56 регулирования глубины, который обеспечивает изменение высоты рамы 36 в вертикальном направлении относительно колес 44 для регулирования заглубления, которые перемещаются по почве. Рама 36 несет ножи 40 сошника, и рычажный механизм 56 обеспечивает регулирование рабочей глубины заглубления ножей 40 относительно колес 44 для регулирования заглубления и, следовательно, относительно верхней поверхности почвы.
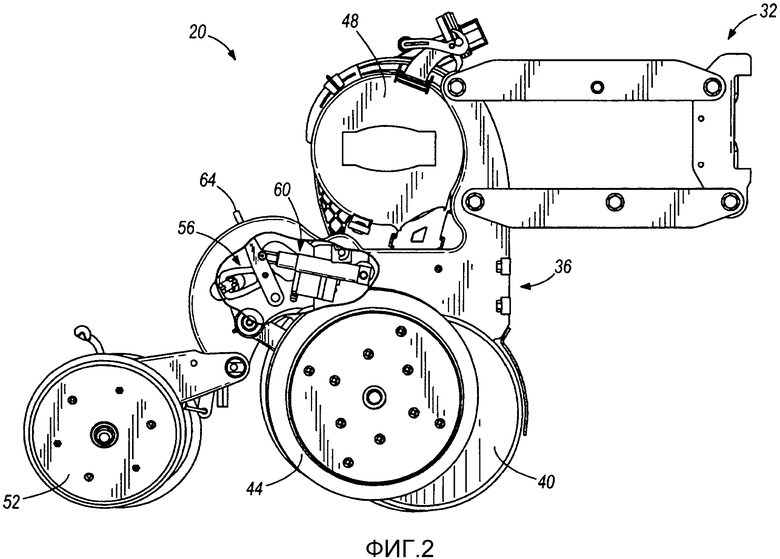
Как показано на фиг. 2, рама 36 включает в себя две боковые панели, при этом часть проксимальной боковой панели срезана, чтобы показать часть системы 28 дистанционного регулирования глубины нарезания, которая включает в себя рычажный механизм 56 регулирования глубины. Рычажный механизм 56 регулирования глубины и связанные с ним компоненты аналогичны рычажному механизму регулирования глубины и связанным с ним компонентам, раскрытым в патенте США No. 6,148,747, все содержание которого включено в данный документ путем ссылки. Таким образом, компоненты и функциональность рычажного механизма 56 регулирования глубины и связанных с ним компонентов не будут полностью описаны в данном документе. Напротив, компоненты и функциональность рычажного механизма 56 регулирования глубины, необходимые для передачи идеи настоящего изобретения, будут обозначены, проиллюстрированы и описаны в данном документе более подробно.
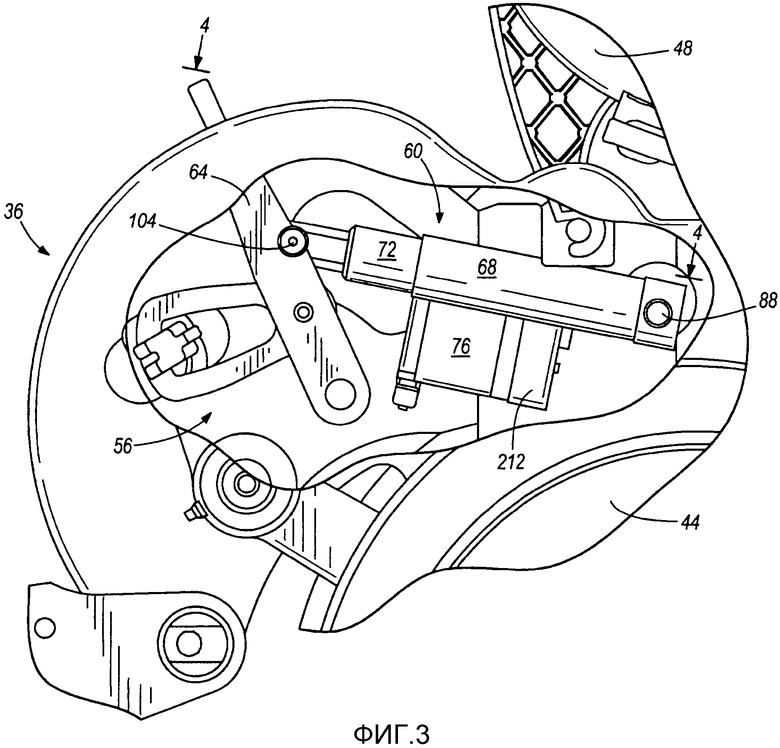
При продолжении рассмотрения фиг. 2 и дополнительном рассмотрении фиг. 3-6 можно указать, что система 28 дистанционного регулирования глубины нарезания включает в себя приведенный в качестве примера привод 60, присоединенный к ручке 64 рычажного механизма 56 регулирования глубины для перемещения ручки 64. В соответствии с описанием патента США No. 6,148,747 перемещение ручки 64 в конце концов обеспечивает регулирование глубины нарезания, обеспечиваемой ножами 40 сошника, и глубины борозды. Привод 60 может представлять собой привод любого типа, например такой как привод линейного перемещения, привод вращательного движения, пневматический привод, гидравлический привод, электрический привод, любую их комбинацию и т.д., и может быть соответственно присоединен к источнику пневмопитания, источнику гидропитания, источнику электропитания, любой комбинации их и т.д. и может снабжаться энергией соответственно от источника пневмопитания, источника гидропитания, источника электропитания, любой комбинации их и т.д. В проиллюстрированном приведенном в качестве примера варианте осуществления привод представляет собой электрический привод 60 линейного перемещения и присоединен к источнику электропитания, и снабжается энергией от источника электропитания (описанного ниже более подробно). Следует понимать, что проиллюстрированный приведенный в качестве примера вариант осуществления привода 60 и источника питания не предназначен для того, чтобы ограничивать настоящее изобретение, и привод, и источник питания любого типа могут быть использованы и находиться в пределах предполагаемых сущности и объема настоящего изобретения.
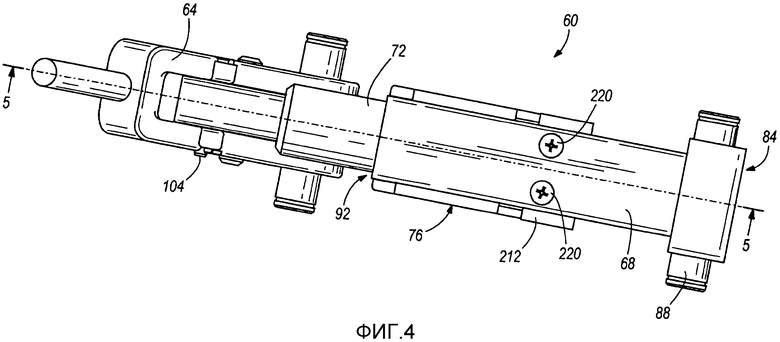
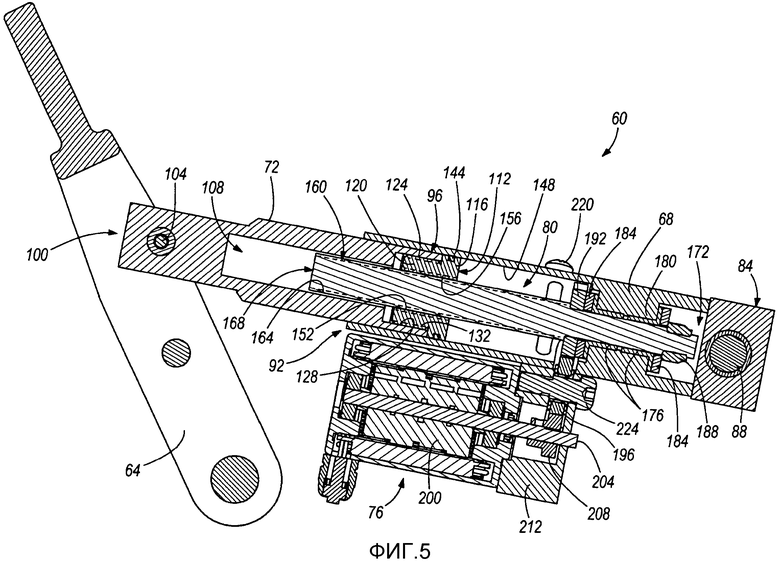
При ссылке на проиллюстрированный приведенный в качестве примера вариант осуществления привода 60 следует отметить, что привод 60 включает в себя корпус 68, присоединенный к раме 36 рядного блока 20, подвижный рычаг 72, присоединенный к корпусу 68 и выполненный с возможностью линейного поступательного перемещения относительно корпуса 68, и приводной механизм 76, присоединенный к корпусу 68 и рычагу 72 для обеспечения перемещения рычага 72 относительно корпуса 68.
В корпусе 68 образована полость 80, и корпус 68 имеет первый конец 84, присоединенный к раме 36 с возможностью поворота посредством оси 88. Второй конец 92 корпуса 68 открывается в полость 80. Рычаг 72 имеет первый конец 96, расположенный и перемещаемый в полости 80 корпуса, и второй конец 100, присоединенный к ручке 64 с возможностью поворота посредством оси 104. В рычаге 72 также образована полость 108, при этом первый конец 96 рычага 72 открывается в полость 108 рычага. Гайка 112 присоединена к рычагу 72 на первом конце 96 и может быть присоединена к рычагу 72 разными способами. В проиллюстрированном приведенном в качестве примера варианте осуществления гайка 112 имеет буртик 116, часть 120 с уменьшенным диаметром и резьбу 124, образованную на наружной поверхности части 120 с уменьшенным диаметром. Часть 120 с уменьшенным диаметром, имеющая резьбу 124, выполненную на ней, ввинчивается в открытый первый конец 96 рычага 72. На части внутренней стенки 128 рычага 72 образована резьба 132, которая является комплементарной по отношению к резьбе 124, образованной на наружной поверхности гайки 112. Гайку 112 ввинчивают в открытый первый конец 96 рычага 72 до тех пор, пока буртик 116 не упрется в первый конец 96 рычага 72. Уплотнительный элемент 144, например такой как уплотнительное кольцо, расположен между буртиком 116 и внутренней поверхностью 148 корпуса 68 для создания уплотнения между ними, в результате чего создается препятствие для прохода загрязняющих частиц в полость 80 корпуса.
В гайке 112 также образованы сквозное отверстие 152 и резьба 156 на внутренней поверхности гайки 112. Привод 60 также включает в себя приводной шток 160, при этом, по меньшей мере, на части наружной поверхности приводного штока 160 образована резьба 164, и приводной шток 160 расположен в отверстии 152 гайки соединен с гайкой 112 с помощью резьбового соединения посредством взаимодополняющих резьб 156, 164. Первый конец 168 приводного штока 160 расположен в полости 108 рычага, и второй конец 172 приводного штока 160 расположен внутри корпуса 68. Приводной шток 160 опирается рядом с его вторым концом 172 на две втулки 176, окружающие приводной шток 160 и расположенные между приводным штоком 160 и внутренним буртиком 180 корпуса 68. Две шайбы 184 окружают приводной шток 160, при этом по одной из них расположено на конце каждой втулки 176 для того, чтобы удерживать втулки 176 в заданном положении. Втулки 176 обеспечивают возможность поворота приводного штока 160 относительно корпуса 68 без значительного трения. Фиксирующая гайка 188 навинчена на второй конец 172 приводного штока 160, чтобы воспрепятствовать поступательному перемещению приводного штока 160 относительно корпуса 68. В частности, приводной шток 160 может поворачиваться относительно корпуса 68, но предотвращается его поступательное перемещение относительно корпуса 68. Зубчатое колесо 192 неподвижно присоединено к приводному штоку 160 между первым и вторым концами 168, 172 приводного штока 160 и входит в зацепление с промежуточным зубчатым колесом 196 приводного механизма 76.
Приводной механизм 76 может представлять собой приводной механизм из широкого ряда различных механизмов, обеспечивающих возможность поворота/вращения приводного штока 160 привода 60. Проиллюстрированный приведенный в качестве примера вариант осуществления приводного механизма 76 не предназначен для того, чтобы ограничивать настоящее изобретение. Проиллюстрированный приведенный в качестве примера приводной механизм 76 включает в себя электродвигатель 200, электрически соединенный с источником электропитания, выходной вал 204, выходную шестерню 208, соединенную с выходным валом 204 и приводимую во вращение выходным валом 204, и промежуточное зубчатое колесо 196, входящее в зацепление с выходной шестерней 208 и зубчатым колесом 192 приводного штока. Промежуточное зубчатое колесо 196 передает вращение от выходной шестерни 208 зубчатому колесу 192 приводного штока, тем самым, обеспечивая приведение приводного штока 160 во вращение при включении электродвигателя 200. Приводной механизм 76 присоединен к опоре 212 электродвигателя посредством множества крепежных деталей 216, и опора 212 электродвигателя присоединена к корпусу 68 привода посредством множества крепежных деталей 220. Данная конфигурация обеспечивает жесткое крепление приводного механизма 76 к корпусу 68 привода. Могут быть использованы другие способы жесткого соединения приводного механизма 76 с корпусом 68 привода, и предусмотрено, что все подобные альтернативные варианты находятся в пределах сущности и объема настоящего изобретения. Промежуточное зубчатое колесо 196 зафиксировано в заданном положении посредством опорного стержня 224, проходящего через центр промежуточного зубчатого колеса 196 и соединенного с опорой 212 электродвигателя. Подшипник 228 расположен между промежуточным зубчатым колесом 196 и опорным стержнем 224 для облегчения вращения промежуточного зубчатого колеса 196 относительно опорного стержня 224.
После описания конструктивных элементов привода 60 будет рассмотрена работа привода 60.
При продолжении рассмотрения фиг. 2-6 можно указать, что приводной механизм 76 может быть приведен в действие в любом из двух направлений для обеспечения вращения приводного штока 160 в любом из двух направлений. При приведении в действие приводного механизма 76 выходной вал 204 обеспечивает вращение выходной шестерни 208, которая вызывает вращение промежуточного зубчатого колеса 196, зубчатого колеса 192 приводного штока и в конечном счете приводного штока 160. Поскольку предотвращается поступательное перемещение приводного штока 160, приводной шток 160 просто вращается относительно корпуса 68. Соединение резьбы 164 на наружной поверхности приводного штока 160 с резьбой 156, образованной в отверстии 152 гайки 122, обеспечивает поступательное перемещение гайки 112 вдоль приводного штока 160, что вызывает поступательное перемещение рычага 72 относительно корпуса 68 привода. В конечном счете, рычаг 72 присоединен к ручке 64 рычажного механизма 56 регулирования глубины, и поступательное перемещение рычага 72 вызывает перемещение ручки 64. В зависимости от направления вращения электродвигателя рычаг 72 может втягиваться в корпус 68, в результате чего ручка 64 перемещается в направлении по часовой стрелке (если смотреть на фиг. 2) или по направлению к приводу 60, или рычаг 72 может выталкиваться из корпуса 68, в результате чего ручка 64 будет перемещаться в направлении против часовой стрелки (если смотреть на фиг. 2) или в сторону от привода 60. Перемещение ручки 64 в направлении по часовой стрелке вызывает уменьшение глубины нарезания, обеспечиваемой ножами 40, и уменьшение глубины борозды, и перемещение ручки 64 в направлении против часовой стрелки вызывает увеличение глубины нарезания, обеспечиваемой ножами 40, и увеличение глубины борозды. Когда приводной механизм 76 не приведен в действие, привод 60 зафиксирован в заданном положении для фиксации ручки 64 в заданном положении, в результате ножи 40 будут удерживаться на соответствующей им глубине нарезания.
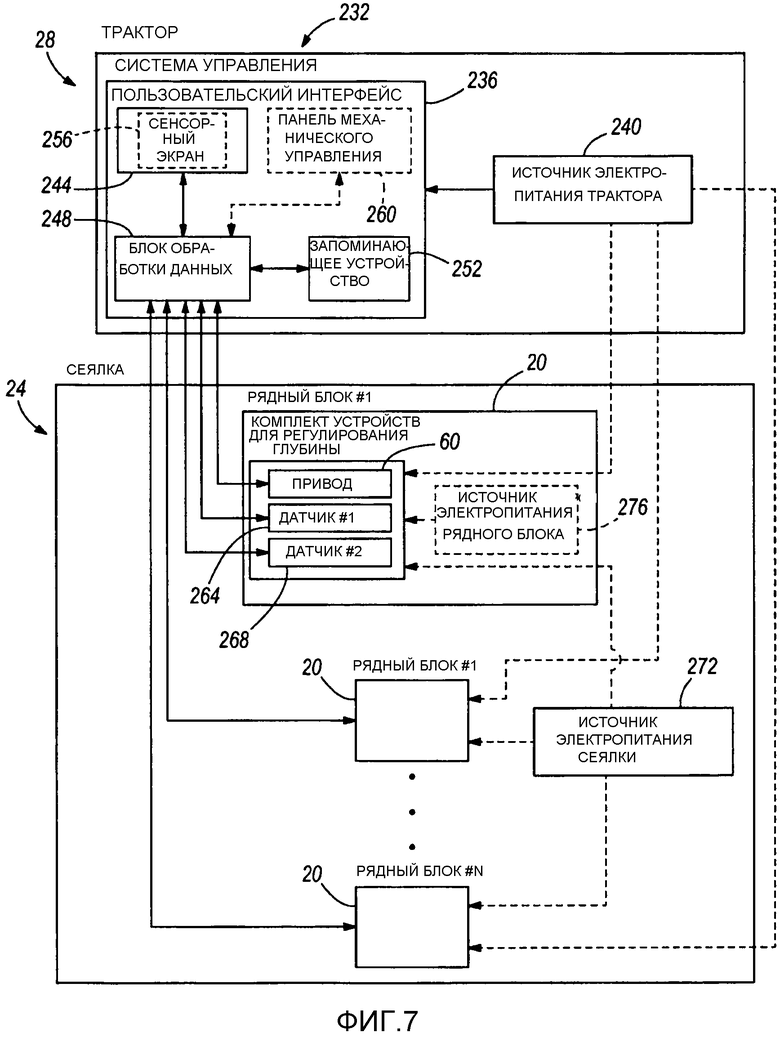
На фиг. 7 проиллюстрирована схема приведенной в качестве примера системы 28 дистанционного регулирования глубины нарезания. Приведенная в качестве примера система 28 дистанционного регулирования глубины нарезания не предназначена для того, чтобы быть ограничивающей, и множество разных других систем дистанционного регулирования глубины нарезания могут быть использованы, и при этом они будут по-прежнему находиться в пределах предполагаемых сущности и объема настоящего изобретения.
Проиллюстрированная приведенная в качестве примера система 28 дистанционного регулирования глубины нарезания включает в себя трактор 232 и устройство 24 сельскохозяйственного назначения, например такое как сеялка, которая присоединена к трактору 232 и которую тянет трактор 232. Трактор 232 включает в себя систему 236 управления и источник 240 электропитания, предназначенный для подачи электропитания к системе 236 управления. Система 236 управления включает в себя пользовательский интерфейс 244, блок 248 обработки данных и запоминающее устройство 252. В некоторых приводимых в качестве примера вариантах осуществления пользовательский интерфейс 244 может иметь возможности 256 сенсорного экрана, в результате чего пользователю будут предоставлены выходной дисплей для визуального отображения информации и возможность ввода информации посредством клавиатуры сенсорного экрана, кнопок или других средств управления и возможностей сенсорного экрана. В других приводимых в качестве примера вариантах осуществления пользовательский интерфейс 244 может представлять собой только устройство вывода, предназначенное для отображения/воспроизведения информации, и система 236 управления может включать в себя панель 260 механического управления, включающую в себя множество разных механических переключателей, кнопок и т.д., выполненных так, что пользователь может манипулировать ими для ввода заданной информации. В дополнительных приводимых в качестве примера вариантах осуществления система 236 управления может включать в себя комбинацию пользовательского интерфейса, выполненного в виде сенсорного экрана, и панели механического управления для вывода и ввода заданной информации. Блок 248 обработки данных выполняет необходимую обработку данных для обеспечения заданной функциональности системы 28 дистанционного регулирования глубины нарезания и осуществляет связь с устройствами ввода, устройствами вывода, запоминающим устройством и устройством сельскохозяйственного назначения, так как необходимо для обеспечения подобной заданной функциональности.
При продолжении рассмотрения фиг. 7 следует отметить, что устройство сельскохозяйственного назначения может представлять собой сеялку 24, и сеялка 24 может включать в себя множество рядных блоков 20 сеялки. Сеялка 24 может включать в себя любое число рядных блоков 20, которое показано в виде примера посредством обозначений: Рядный блок #1; Рядный блок #2; …; Рядный блок #N. Как указано выше, рядные блоки 20 могут быть по существу одинаковыми, и, следовательно, только детали Рядного блока #1 показаны подробно. Следует понимать, что все рядные блоки 20 могут включать в себя компоненты и иметь функциональные возможности, аналогичные компонентам и функциональным возможностям Рядного блока #1, но подобные компоненты и функциональные возможности не будут представлены в данном документе для краткости.
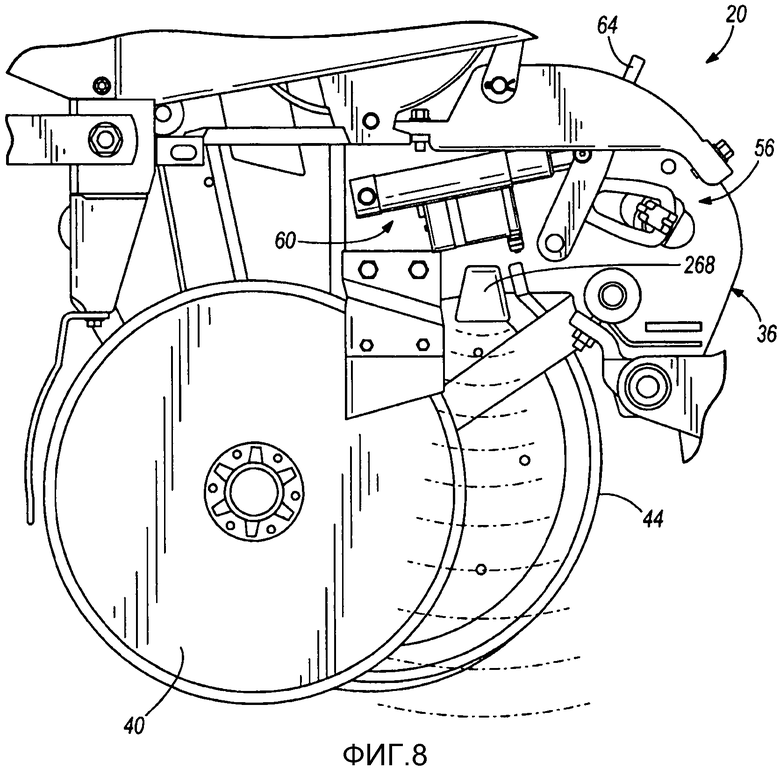
Рядный блок #1 включает в себя привод 60, описанный выше и проиллюстрированный на фиг. 2-6. Привод 60 соединен с ручкой 64 рычажного механизма 56 регулирования глубины и выполнен с возможностью обеспечения перемещения рычажного механизма 56 регулирования глубины для регулирования глубины нарезания, обеспечиваемой ножами 40, и глубины борозды. Рядный блок #1 может включать в себя один или несколько датчиков 264, 268 для определения глубины нарезания, обеспечиваемой ножами 40, и глубины борозды. Глубина нарезания и глубина борозды могут быть определены множеством разных способов посредством использования множества разных типов датчиков, которые могут определять множество различных параметров или характеристик. Например, в проиллюстрированном приведенном в качестве примера варианте осуществления каждый рядный блок 20 может включать в себя первый датчик 264, предназначенный для определения положения ручки 64, и второй датчик 268, предназначенный для определения глубины борозды. Следует понимать, что каждый рядный блок 20 может включать в себя только один из данных датчиков, может включать в себя более двух датчиков для определения дополнительных параметров или может включать в себя любую комбинацию датчиков для определения любых соответствующих параметров, которые в конечном счете способствуют определению глубины нарезания, обеспечиваемой ножами 40, и глубины борозды. Например, в некоторых приводимых в качестве примера вариантах осуществления рядный блок может включать в себя три датчика, а именно первый датчик для определения положения ручки, второй датчик для определения глубины борозды и третий датчик для определения влажности почвы.
Первый датчик 264, предназначенный для определения положения ручки 64, может представлять собой датчик любого типа, например такой как ультразвуковой датчик, лазерный датчик, видеокамера, инфракрасный датчик, инфракрасная камера, инфракрасный сканер, потенциометр, и датчик СВЧ-излучения, и может быть присоединен к любой части рядного блока 20 при условии, что он может функционировать соответствующим образом для определения положения ручки 64. В некоторых приводимых в качестве примера вариантах осуществления первый датчик 264 может быть присоединен к внутренней части рамы 36 вблизи ручки 64. Второй датчик 268, предназначенный для определения глубины борозды, может представлять собой датчик любого типа, например такой как ультразвуковой датчик, лазерный датчик и т.д., и может быть присоединен к любой части рядного блока 20 при условии, что он может функционировать соответствующим образом для определения глубины борозды. В некоторых приводимых в качестве примера вариантах осуществления второй датчик 268 может быть присоединен к раме 36 и может быть направлен вниз к почве и борозде, нарезаемой в ней (см. фиг. 8).
В дополнительных приводимых в качестве примера вариантах осуществления система 28 дистанционного регулирования глубины нарезания может включать в себя дополнительный датчик, например такой как датчик усилия, который присоединен к рычажному механизму 56 регулирования глубины для мониторинга и/или измерения направленного вниз усилия, возникающего в рычажном механизме 56 регулирования глубины и приложенного к рядному блоку 20 для принудительного смещения рядного блока 20 вниз по направлению к почве. Датчик усилия может представлять собой датчик любого типа, например такой как динамометрический датчик, датчик давления, потенциометр и т.д., и может быть присоединен к любой части рычажного механизма 56 регулирования глубины при условии, что он может функционировать соответствующим образом для определения направленного вниз усилия. Подобный датчик усилия может быть соединен с помощью электронных средств с блоком 248 обработки данных для того, чтобы блок 248 обработки данных мог получить показания, относящиеся к направленному вниз усилию, и отобразить соответствующую информацию для пользователя посредством пользовательского интерфейса 244, или для того, чтобы блок 248 обработки данных мог осуществить связь с необходимыми компонентами системы 28 дистанционного регулирования глубины нарезания для регулирования глубины нарезания, которая обеспечивается рядным блоком 20.
Датчики 264, 268 генерируют сигнал, соответствующий параметру, определенному датчиком, и блок 248 обработки данных осуществляет связь с датчиками 264, 268 для приема данного сигнала. Блок 248 обработки данных использует сигнал и информацию, содержащуюся в нем и полученную датчиками 264, 268, и отображает заданную информацию на пользовательском интерфейсе 244 для просмотра ее пользователем. В некоторых приводимых в качестве примера вариантах осуществления отображаемая информация может включать в себя глубину нарезания, обеспечиваемую ножами 40, и/или глубину борозды. Пользователь при желании может изменить глубину нарезания, обеспечиваемую ножами 40, и глубину борозды. Для осуществления этого пользователь выполняет заданную регулировку посредством ввода желательной глубины нарезания или глубины борозды посредством одного или нескольких устройств, представляющих собой пользовательский интерфейс 256 в виде сенсорного экрана, панели 260 механического управления или любого другого устройства ввода. После этого блок 248 обработки данных получает введенные данные и осуществляет связь с приводом 60 для обеспечения перемещения привода 60 и регулирования глубины нарезания, обеспечиваемой ножами 40, так, как задано пользователем. Один или несколько датчиков 264, 268 осуществляют мониторинг соответствующих им параметров при регулировании глубины нарезания посредством привода 60, генерируют сигналы на основе параметров, определенных датчиками, передают сигналы, соответствующие параметрам, которые определены датчиками, в блок 248 обработки данных, и блок 248 обработки данных управляет приводом 60 до тех пор, пока один или несколько датчиков 264, 268 не определят и не передадут соответствующий параметр, соответствующий заданной глубине нарезания, обеспечиваемой ножами 40. Блок 248 обработки данных отключает привод 60, когда надлежащая глубина нарезания будет достигнута. При выключении привода 60 привод 60 удерживается в заданном положении, в результате чего рядный блок 20 будет зафиксирован при заданной глубине нарезания.
В проиллюстрированном приведенном в качестве примера варианте осуществления приводы 60 и датчики 264, 268 рядных блоков 20 предусмотрены с электропитанием. Электропитание приводов 60 и датчиков 264, 268 может осуществляться множеством разных способов, и предусмотрено, что все подобные способы находятся в пределах сущности и объема настоящего изобретения. В некоторых приводимых в качестве примера вариантах осуществления электропитание приводов 60 и датчиков 264, 268 всех рядных блоков 20 может осуществляться посредством источника 272 электропитания, предусмотренного в устройстве 24 сельскохозяйственного назначения (например в сеялке 24). В других приводимых в качестве примера вариантах осуществления электропитание приводов 60 и датчиков 264, 268 всех рядных блоков 20 может осуществляться посредством источника 240 электропитания, предусмотренного в тракторе. В дополнительных приводимых в качестве примера вариантах осуществления каждый рядный блок 20 может включать в себя свой собственный источник 276 электропитания, и электропитание привода 60 и датчиков 264, 268 в определенном рядном блоке 20 может осуществляться посредством источника 276 электропитания на данном рядном блоке 20.
Вышеописанные источники электропитания могут представлять собой источники электропитания из широкого ряда типов источников электропитания, и предусмотрено, что все подобные различные источники электропитания находятся в пределах предполагаемых сущности и объема настоящего изобретения. Например, источник электропитания может представлять собой генератор переменного тока, соединенный с гидравлическим двигателем, генератор переменного тока, механически соединенный с двигателем трактора, генератор переменного тока, соединенный с ходовым приводом, генератор переменного тока, соединенный с электродвигателем, аккумуляторный источник питания и т.д.
Как указано выше, в некоторых приводимых в качестве примера вариантах осуществления приводы 60 в рядных блоках 20 могут представлять собой пневматические или гидравлические приводы, в результате чего требуется источник пневмопитания или источник гидропитания для соответствующего снабжения энергией приводов. В подобных приводимых в качестве примера вариантах осуществления и аналогично приводам с электропитанием, приводы могут снабжаться энергией множеством разных способов. В некоторых приводимых в качестве примера вариантах осуществления подача питания для пневматических или гидравлических приводов всех рядных блоков 20 может осуществляться соответствующим образом посредством источника пневмопитания или гидропитания, предусмотренного в устройстве 24 сельскохозяйственного назначения (например в сеялке 24). В других приводимых в качестве примера вариантах осуществления подача питания для пневматических или гидравлических приводов всех рядных блоков 20 может осуществляться соответствующим образом посредством источника пневмопитания или гидропитания, предусмотренного в тракторе 232. В дополнительных приводимых в качестве примера вариантах осуществления каждый рядный блок 20 может включать в себя свой собственный источник пневмопитания или гидропитания, и подача питания для привода 60 в определенный рядный блок 20 может осуществляться соответствующим образом посредством источника пневмопитания или гидропитания на данный рядный блок 20.
Система 28 дистанционного регулирования глубины нарезания может представлять собой или систему без обратной связи, или систему с обратной связью. В случае системы без обратной связи в системе 28 дистанционного регулирования глубины нарезания используются один или несколько датчиков 264, 268 для восприятия одного или нескольких параметров, блок обработки данных получает воспринятые параметр(-ы), и отображает или иным образом выдает информацию пользователю посредством пользовательского интерфейса 244, и пользователь может выполнить желательную регулировку глубины нарезания посредством использования устройств ввода, например таких как пользовательский интерфейс 256 в виде сенсорного экрана или панель 260 механического управления. В случае системы с обратной связью в системе 28 дистанционного регулирования глубины нарезания используются один или несколько датчиков 264, 268 для непрерывного восприятия одного или нескольких параметров в реальном времени, и блок 248 обработки данных получает воспринятый(ые) параметр(-ы), отображает или иным образом выдает информацию пользователю посредством пользовательского интерфейса 244, определяет, соответствует/соответствуют ли воспринятый(ые) параметр(-ы), заданной глубине нарезания, и осуществляет связь с необходимыми компонентами системы 28 для регулирования глубины нарезания, если воспринятый(ые) параметр(-ы), не соответствует(-ют) заданной глубине нарезания. Подобная заданная глубина нарезания может быть введена в систему пользователем, может базироваться на исторических данных, может быть определена на основе параметров, определяемых датчиками, и т.д.
Далее рассматривается фиг. 9, на которой проиллюстрирована другая приведенная в качестве примера система 28А дистанционного регулирования глубины нарезания. Компоненты системы 28А, проиллюстрированной на фиг. 9, которые аналогичны компонентам системы 28, проиллюстрированной на фиг. 1-8, обозначены теми же ссылочными номерами и буквой А.
Система 28А, проиллюстрированная на фиг. 9, имеет много элементов, сходных с системой 28, проиллюстрированной на фиг. 1-8. По меньшей мере, одно различие между системой 28А, проиллюстрированной на фиг. 9, и системой 28, проиллюстрированной на фиг. 1-8, заключается в том, что устройство сельскохозяйственного назначения или сеялка 24А, а не трактор 232А, включает в себя блок 248А обработки данных и запоминающее устройство 252А в отличие от системы 28. При блоке 248А обработки данных, включенном в сеялку 24А, источник 272А электропитания, предусмотренный в сеялке, может снабжать электрической энергией блок 248А обработки данных. Даже при данном различии система 28А может выполнять все те же функции, что и система 28, проиллюстрированная на фиг. 1-8.
Следует понимать, что блок обработки данных, запоминающее устройство и любые другие компоненты систем могут быть предусмотрены или в тракторе, или в сеялке и в любой комбинации и при этом будут находиться в пределах предполагаемых сущности и объема настоящего изобретения. Например, сеялка может включать в себя блок обработки данных, а трактор может включать в себя запоминающее устройство. Кроме того, например, трактор может включать в себя блок обработки данных, а сеялка может включать в себя запоминающее устройство.
Вышеприведенное описание было представлено в целях иллюстрации и описания и не предназначено для того, чтобы быть исчерпывающим или ограничивать изобретение точно определенным раскрытым вариантом. Описания были выбраны для разъяснения принципов изобретения и их практического применения для того, чтобы дать возможность другим специалистам в данной области техники использовать изобретение в разных вариантах осуществления и разных модификациях, какие подходят для конкретного предполагаемого использования. Несмотря на то, что определенные конструкции по настоящему изобретению были показаны и описаны, другие альтернативные конструкции будут очевидны для специалистов в данной области техники, и при этом они будут находиться в пределах предполагаемого объема настоящего изобретения.
Группа изобретений относится к области сельскохозяйственного машиностроения, в частности к орудиям для посева семян и способу регулирования глубины борозды. Устройство сельскохозяйственного назначения для посева семян содержит соединенный с рамой сошник, полупроводниковый датчик, блок обработки данных. Полупроводниковый датчик выполнен с возможностью воспринимать характеристику, связанную с посевом семян, и генерировать сигнал, соответствующий воспринятой характеристике. Блок обработки данных, выполнен с возможностью принимать сигнал, соответствующий воспринятой характеристике. Глубина борозды может регулироваться на основе сигнала, соответствующего воспринятой характеристике. Подобная характеристика может представлять собой характеристику почвы, усилие, приложенное к устройству сельскохозяйственного назначения, или положение части устройства сельскохозяйственного назначения. Такое конструктивное решение направлено на повышение точности при нарезании борозды. 3 н. и 20 з.п. ф-лы, 9 ил.
1. Устройство сельскохозяйственного назначения, выполненное с возможностью посева семян, при этом устройство сельскохозяйственного назначения содержит:
раму;
сошник, соединенный с рамой и выполненный с возможностью нарезания борозды, имеющей глубину;
полупроводниковый датчик, выполненный с возможностью воспринимать характеристику, связанную с посевом семян, и генерировать сигнал, соответствующий воспринятой характеристике; и
блок обработки данных, принимающий сигнал, соответствующий воспринятой характеристике;
при этом указанная характеристика является характеристикой почвы и представляет собой одно из температуры почвы, или содержания влаги в почве, или глубины борозды, или типа почвы,
при этом глубина борозды может регулироваться на основе сигнала, соответствующего воспринятой характеристике.
2. Устройство сельскохозяйственного назначения по п. 1, в котором датчик размещен по меньшей мере частично позади сошника.
3. Устройство сельскохозяйственного назначения по п. 2, в котором датчик является независимым от механических связей.
4. Устройство сельскохозяйственного назначения по п. 1, в котором характеристика представляет собой усилие, приложенное к устройству сельскохозяйственного назначения, и сигнал соответствует усилию, приложенному к блоку устройства сельскохозяйственного назначения.
5. Устройство сельскохозяйственного назначения по п. 1, в котором датчик является одним из:
ультразвукового датчика;
лазерного датчика;
видеокамеры;
инфракрасного датчика;
инфракрасной камеры;
инфракрасного сканера;
потенциометра; и
датчика СВЧ-излучения.
6. Устройство сельскохозяйственного назначения по п. 1, дополнительно содержащее механизм регулирования глубины борозды и колесо для регулирования заглубления, при этом колесо для регулирования заглубления соединено с рамой посредством механизма регулирования глубины борозды, и при этом устройство сельскохозяйственного назначения дополнительно содержит второй датчик для определения второй характеристики.
7. Устройство сельскохозяйственного назначения по п. 6, в котором вторая характеристика представляет собой усилие, приложенное к колесу для регулирования заглубления, а сигнал соответствует усилию, приложенному к колесу для регулирования заглубления.
8. Устройство сельскохозяйственного назначения по п. 6, в котором характеристика представляет собой положение, по меньшей мере, части механизма регулирования глубины борозды, а сигнал соответствует положению, по меньшей мере, данной части механизма регулирования глубины борозды.
9. Устройство сельскохозяйственного назначения по п. 6, в котором механизм регулирования глубины борозды включает в себя ручку, и характеристика представляет собой положение ручки, и при этом сигнал соответствует положению ручки.
10. Устройство сельскохозяйственного назначения по п. 6, в котором механизм регулирования глубины борозды включает в себя привод, и при этом блок обработки данных осуществляет связь с приводом для регулирования глубины борозды на основе сигнала.
11. Устройство сельскохозяйственного назначения по п. 6, дополнительно содержащее пользовательский интерфейс, соединенный с блоком обработки данных, и информация, связанная с воспринятой характеристикой, отображается на пользовательском интерфейсе, при этом механизм регулирования глубины борозды включает в себя привод, и при этом пользователь имеет возможность дистанционного регулирования привода для регулирования глубины борозды на основе информации, отображенной на пользовательском интерфейсе.
12. Устройство сельскохозяйственного назначения по п. 1, в котором блок обработки данных осуществляет связь с устройством сельскохозяйственного назначения для регулирования глубины борозды на основе сигнала.
13. Устройство сельскохозяйственного назначения по п. 1, в котором блок обработки данных определяет, необходима ли регулировка глубины борозды на основе сигнала.
14. Устройство сельскохозяйственного назначения по п. 1, в котором датчик представляет собой первый датчик, характеристика представляет собой первую характеристику, и сигнал представляет собой первый сигнал, соответствующий первой характеристике, при этом устройство сельскохозяйственного назначения дополнительно содержит второй датчик, выполненный с возможностью воспринимать вторую характеристику, связанную с посевом семян, и генерировать второй сигнал, соответствующий воспринятой второй характеристике.
15. Устройство сельскохозяйственного назначения по п. 14, в котором блок обработки данных принимает первый сигнал и второй сигнал, и в котором глубина борозды может регулироваться на основе первого и второго сигналов, соответственно соответствующих воспринятым первой и второй характеристикам.
16. Система регулирования рядного блока, предназначенная для использования вместе с сельскохозяйственной сеялкой для посева семян, при этом сельскохозяйственная сеялка включает в себя рядный блок, включающий в себя раму и сошник, соединенный с рамой и выполненный с возможностью нарезания борозды, имеющей глубину, при этом система регулирования рядного блока содержит:
привод, соединенный с рядным блоком и выполненный с возможностью регулирования глубины борозды;
полупроводниковый датчик, выполненный с возможностью воспринимать характеристику, связанную с посевом семян, и генерировать сигнал, соответствующий воспринятой характеристике; при этом указанная характеристика является характеристикой почвы и представляет собой одно из температуры почвы, или содержания влаги в почве, или глубины борозды, или типа почвы,
блок обработки данных, соединенный с датчиком и приводом, и при этом блок обработки данных выполнен с возможностью приема сигнала, соответствующего воспринятой характеристике, и осуществления связи с приводом для регулирования глубины борозды на основе данного сигнала.
17. Система регулирования рядного блока по п. 16, в которой блок обработки данных определяет, требуется ли регулировка глубины борозды на основе сигнала и вслед за этим осуществляет связь с приводом для регулирования глубины борозды, если блок обработки данных определяет, что регулировка необходима.
18. Система регулирования рядного блока по п. 16, дополнительно содержащая пользовательский интерфейс, соединенный с блоком обработки данных, при этом блок обработки данных отображает информацию на пользовательском интерфейсе на основе сигнала, соответствующего воспринятой характеристике, и при этом пользователь инициирует связь между блоком обработки данных и приводом для регулирования глубины борозды.
19. Способ регулирования глубины борозды, нарезаемой посредством рядного блока сельскохозяйственной сеялки, при этом рядный блок включает в себя раму и сошник, соединенный с рамой, при этом способ содержит этапы, на которых:
воспринимают характеристику, связанную с посевом семян, посредством полупроводникового датчика;
генерируют сигнал, соответствующий данной характеристике, посредством датчика, при этом указанная характеристика является характеристикой почвы и представляет собой одно из температуры почвы, или содержания влаги в почве, или глубины борозды, или типа почвы;
передают сигнал в блок обработки данных; и
регулируют глубину борозды, нарезаемой посредством рядного блока, на основе сигнала, принятого блоком обработки данных.
20. Способ по п. 19, в котором этап, на котором воспринимают характеристику, включает в себя восприятия одного из положения, по меньшей мере, части механизма регулирования глубины борозды, характеристики почвы, по которой перемещается сельскохозяйственная сеялка, или усилия, приложенного к рядному блоку.
21. Способ по п. 19, в котором рядный блок также включает в себя механизм регулирования глубины борозды и колесо для регулирования заглубления, при этом колесо для регулирования заглубления соединено с рамой посредством механизма регулирования глубины борозды, при этом механизм регулирования глубины борозды включает в себя привод, выполненный с возможностью регулирования глубины борозды, и в котором этап регулирования глубины борозды дополнительно включает осуществление связи с приводом для регулирования глубины борозды.
22. Способ по п. 19, дополнительно содержащий отображение информации на пользовательском интерфейсе на основе сигнала, принятого блоком обработки данных, и в котором регулирование глубины борозды дополнительно включает в себя инициирование вручную связи между блоком обработки данных и рядным блоком после отображения информации на пользовательском интерфейсе.
23. Способ по п. 19, в котором регулирование глубины борозды дополнительно включает в себя автоматическое регулирование глубины борозды посредством блока обработки данных на основе сигнала, принятого блоком обработки данных.
| US 3749035 A, 31.07.1973 | |||
| US 6389999 B1, 21.05.2002 | |||
| US 6148747 A, 21.11.2000 | |||
| US 6216794 B2, 17.04.2001 |

